VSLAM之maplab编译运行
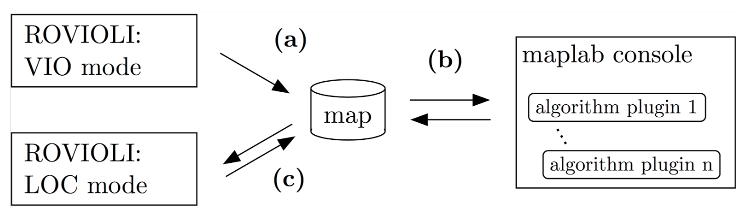
maplab是ETH的ASL团队在2018年开源的一个视觉+惯性导航的建图框架,可以实现多场景建图的创建、处理和操作。它包含了两部分:在线的前端ROVIOLI用于创建地图,可以实现建图和定位功能;离线的地图处理包maplab_console,可以为生成的地图进行二次处理(生成地图优化、组合和建立稠密地图等)。其工作流程如下图所示
-
(a) 在VIO模式下使用ROVIOLI进行建图。
-
(b) 使用maplab console对地图进行优化,实现不同地图的融合。
-
(c) 在定位模式下运行ROVIOLI,定位的功能提高了视觉+惯性导航的位姿估计精度。
按照官方教程进行编译,
- 首先安装依赖
需要注意,clang-format-3.8已经无法在18.04的ubuntu上使用了,需要安装3.9版本.
# Install ROS
export UBUNTU_VERSION=bionic #(Ubuntu 16.04: xenial, Ubuntu 14.04: trusty, Ubuntu 18.04: bionic)
export ROS_VERSION=melodic #(Ubuntu 16.04: kinetic, Ubuntu 14.04: indigo, Ubuntu 18.04: melodic)
# NOTE: Follow the official ROS installation instructions for melodic.
sudo apt install software-properties-common
sudo add-apt-repository "deb http://packages.ros.org/ros/ubuntu $UBUNTU_VERSION main"
wget https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -O - | sudo apt-key add -
sudo apt update
sudo apt install ros-$ROS_VERSION-desktop-full "ros-$ROS_VERSION-tf2-*" "ros-$ROS_VERSION-camera-info-manager*" --yes
# Install framework dependencies.
# NOTE: clang-format-3.8 is not available anymore on bionic, install a newer version.
sudo apt install autotools-dev ccache doxygen dh-autoreconf git liblapack-dev libblas-dev libgtest-dev libreadline-dev libssh2-1-dev pylint clang-format-3.9 python-autopep8 python-catkin-tools python-pip python-git python-setuptools python-termcolor python-wstool libatlas3-base --yes
sudo pip install requests
- 然后更新ROS环境
sudo rosdep init
rosdep update
echo ". /opt/ros/$ROS_VERSION/setup.bash" >> ~/.bashrc
source ~/.bashrc
- 创建catkin工作空间
export ROS_VERSION=kinetic #(Ubuntu 16.04: kinetic, Ubuntu 14.04: indigo)
export CATKIN_WS=~/maplab_ws
mkdir -p $CATKIN_WS/src
cd $CATKIN_WS
catkin init
catkin config --merge-devel # Necessary for catkin_tools >= 0.4.
catkin config --extend /opt/ros/$ROS_VERSION
catkin config --cmake-args -DCMAKE_BUILD_TYPE=Release
cd src
- 下载
git clone https://github.com/ethz-asl/maplab.git --recursive
git clone https://github.com/ethz-asl/maplab_dependencies --recursive
- 编译:
cd $CATKIN_WS
catkin build maplab
- 编译maplab遇到问题及相应解决方法:
-
下载依赖遇到问题:
当编译依赖时,会首先下载源码,有时网络不好的话会导致下载失败,进而导致编译失败,解决方法可以参照官方FAQ,首先离线下载源码,然后copy到相应位置,比如opencv_catkin,可以从
https://github.com/Itseez/opencv/archive/3.2.0.zip中下载,然后将源码解压至:
~/maplab_ws/build/opencv3_catkin/opencv3_src -
编译opencv3_catkin遇到问题
~/maplab_ws/build/opencv3_catkin/opencv3_src/cmake/OpenCVCompilerOptions.cmake报以下错误:A duplicate ELSE command was found inside an IF block.在OpenCVCompilerOptions.cmake文件中注释掉报错的对应行即可。
-
遇到brisk-detector源码问题:解决方法参照https://github.com/ethz-asl/ethzasl_brisk/pull/109,在brisk-feature-detector.cc中加入包含#include
本部分介绍两种方法运行ROVIOLI进行建图,分别是使用rosbag和rostopic;然后运行了定位模式下的ROVIOLI,即加载建好的地图进行定位的方式。
-
需要的配置文件:
相机标定文文件,文件样式
IMU参数-maplab,文件样式
IMU参数-rovio,文件样式
Rovio标定文件,文件样式
默认的配置文件路径为
maplab_ws/src/maplab/applications/rovioli/share -
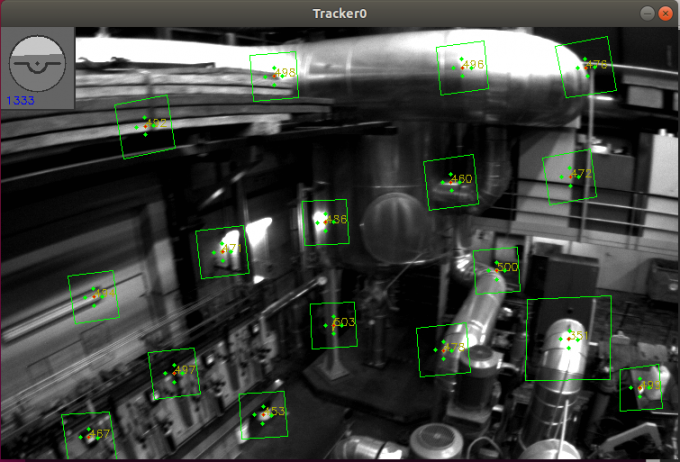
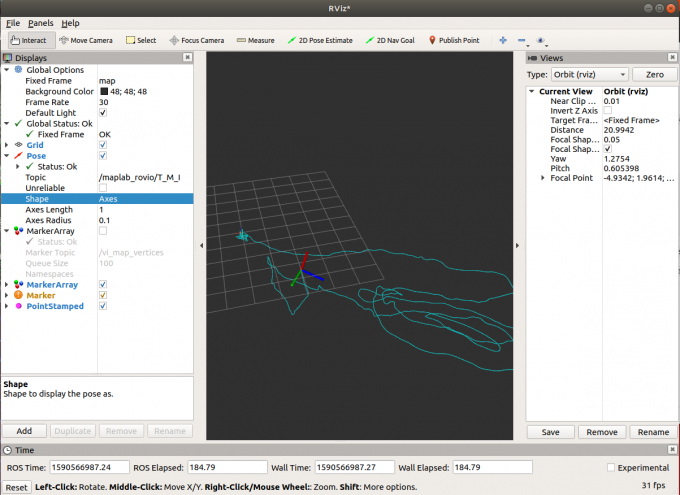
从rosbag中建图:
首先从Euros数据集中下载rosbag,然后运行命令
# Make sure that your maplab workspace is sourced! source ~/maplab_ws/devel/setup.bash roscore& rosrun rovioli tutorial_euroc save_folder MH_01_easy.bag其中,运行脚本路径为:
maplab_ws/src/maplab/applications/rovioli/scripts/tutorials/tutorial_euroc,包含配置文件的路径和运行模式的选择等。save_folder为生成地图的保存路径,MH_01_easy.bag为rosbag的保存路径。运行效果如下图:
地图保存在相应的路径下:
-
从rostopic中建图:
使用小觅相机(S1030)作为传感器,首先需要将相机kalibr标定结果转换为maplab的配置文件的格式。从相机标定文件中可知,除了相机的内参和畸变系数以外,还有相机坐标系到机体坐标系的外参转换矩阵T_B_C。由kalibr的标定结果可以获得
T_ic: (cam0 to imu0)即相机到IMU坐标系的转换,此处机体系和IMU系认为重合,故可在maplab的外参配置文件中使用该矩阵。使用以下脚本启动:
LOCALIZATION_MAP_OUTPUT=$1 NCAMERA_CALIBRATION="$ROVIO_CONFIG_DIR../mynteye/ncameras_pin_equ.yaml" IMU_PARAMETERS_MAPLAB="$ROVIO_CONFIG_DIR../mynteye/imu-icm20602.yaml" IMU_PARAMETERS_ROVIO="$ROVIO_CONFIG_DIR../mynteye/imu-sigmas-rovio.yaml" REST=$@ rosrun rovioli rovioli \ --alsologtostderr=1 \ --v=2 \ --ncamera_calibration=$NCAMERA_CALIBRATION \ --imu_parameters_maplab=$IMU_PARAMETERS_MAPLAB \ --imu_parameters_rovio=$IMU_PARAMETERS_ROVIO \ --datasource_type="rostopic" \ --save_map_folder="$LOCALIZATION_MAP_OUTPUT" \ --map_builder_save_image_as_resources=true \ --rovio_enable_frame_visualization \ --optimize_map_to_localization_map=false $REST \该脚本保存位置为
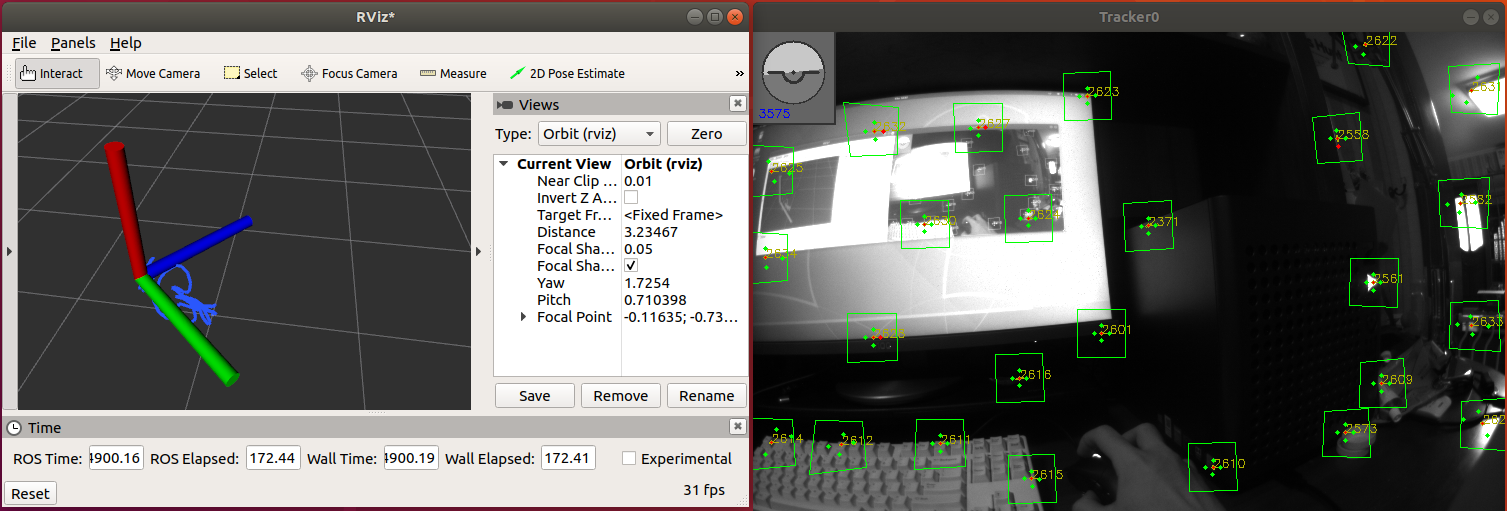
~/maplab_ws/src/maplab/applications/rovioli/scripts/mynt/tutorial_mynt_live_stereo_pinhole_equ.首先启动小觅相机,然后启动rovioli:
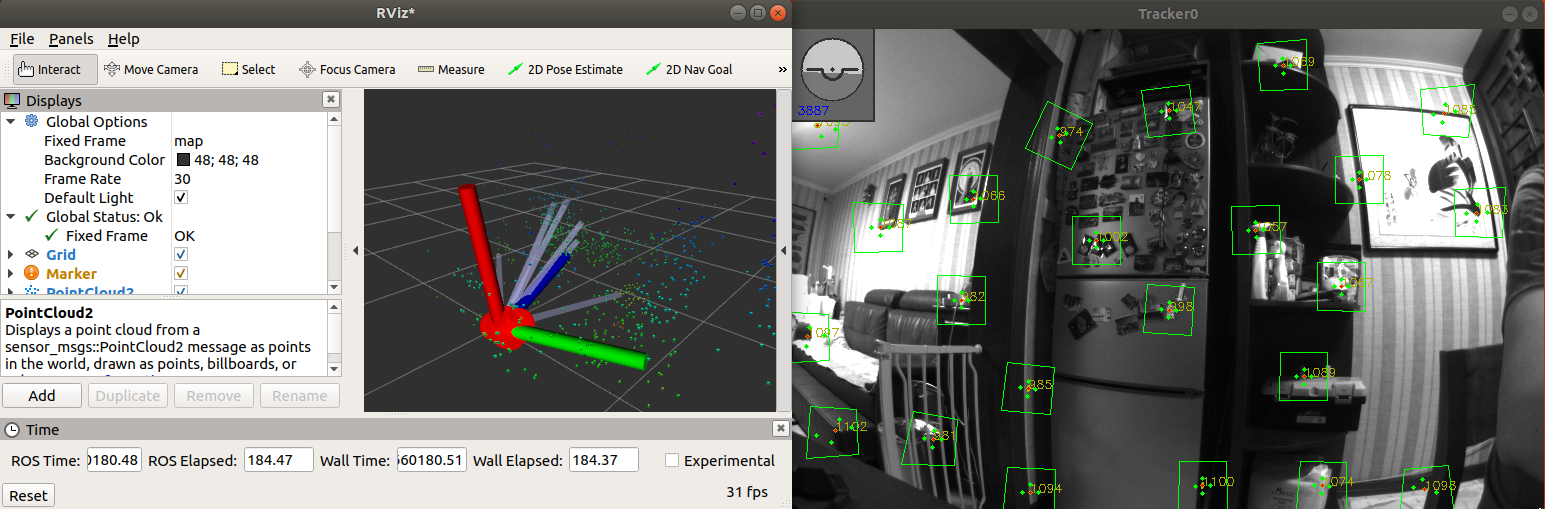
roslaunch mynt_eye_ros_wrapper display.launch source ~/maplab_ws/devel/setup.bash rosrun rovioli tutorial_mynt_live_stereo_pinhole_equ mynt_stereo_live运行效果如下所示:
结束运行后同样会对地图进行保存
-
定位模式下运行ROVIOLI:
定位模式会大大提高定位的精度,降低轨迹估计的漂移。和VIO模式一样,定位模式同样需要三样标定文件(camera, IMU maplab and IMU rovio),另外,还需要一个经过优化过的之前生成的VI map。
产生地图的方式有两种,一种是使用maplab console的方式手动优化地图,另一种是在VIO模式运行rovioli时便将
--optimize_map_to_localization_map设置为true,这样rovioli运行结束后便会生成一张优化后的地图。可以选择rosbag运行定位模式,参照官方教程,这里不作介绍了,下面主要介绍运行小觅相机使用rostopic的方式。
运行以下脚本:
LOCALIZATION_MAP_INPUT=$1 LOCALIZATION_MAP_OUTPUT=$2 NCAMERA_CALIBRATION="$ROVIO_CONFIG_DIR../mynteye/ncameras_pin_equ.yaml" IMU_PARAMETERS_MAPLAB="$ROVIO_CONFIG_DIR../mynteye/imu-icm20602.yaml" IMU_PARAMETERS_ROVIO="$ROVIO_CONFIG_DIR../mynteye/imu-sigmas-rovio.yaml" REST=$@ rosrun rovioli rovioli \ --alsologtostderr=1 \ --v=2 \ --ncamera_calibration=$NCAMERA_CALIBRATION \ --imu_parameters_maplab=$IMU_PARAMETERS_MAPLAB \ --imu_parameters_rovio=$IMU_PARAMETERS_ROVIO \ --publish_debug_markers \ --datasource_type="rostopic" \ --optimize_map_to_localization_map=false \ --vio_localization_map_folder=$LOCALIZATION_MAP_INPUT \ --save_map_folder=$LOCALIZATION_MAP_OUTPUT \ --map_builder_save_image_as_resources=false \ --datasource_rosbag=$ROSBAG $REST --rovio_enable_frame_visualization \运行完成后会保存定位地图,启动小觅相机,然后启动rovioli:
source ~/maplab_ws/devel/setup.bash roscore& rosrun rovioli tutorial_mynt_live_stereo_pinhole_equ_loc save_folder_loc_localization save_map_with_localization其中
save_folder_loc_localization为保存的定位地图路径,运行时选择加载。运行的效果如下所示,相比于VIO模式下的话题,在定位模式下的话题包含更多的关于定位信息的话题:-
/loopclosure_database: Point cloud of all landmarks in the loop closure database. -
/loop_closures: Lines connecting the current active vertex with all landmarks that have been used for the localization. -
/loopclosure_inliers: Point cloud with all landmarks that have been used for the last successful localization. -
/debug_T_G_I_raw_localization: Red points indicating the vertex positions where a successful localization occurred.
-