使用FastPlanner进行轨迹优化
FastPlanner 由三部分组成,分别包括混合A*算法、Bspline轨迹生成和自动时间分配调整。规划流程的主要管理由plannning_fsm函数完成,负责调用规划算法,安全检查等。
混合A算法位于path_searching文件夹,用于实现全局规划 ,主要调用函数为 "search()",在已知地图的前提下,给定起点和终点状态(位置和速度)实现混合A搜索;如果搜索成功,返回一系列path_nodes_节点。
Bspline轨迹位于bspline_opt文件夹,用于轨迹生成。将混合A*的输出轨迹点转化为Bspline的控制点,再调用optimize函数完成优化。
自动时间分配位于位于bspline_opt文件夹,用于对样条轨迹进行时间分配优化(reallocateTime),保证整个轨迹的动力学安全。
另外,系统中还包含一条安全检查线程(safetyCallback),按照固定频率对输入目标点、生成的轨迹进行安全性检查,保证系统随着地图更新也能一直安全。
最后在traj_serve中把得到的bspline轨迹进行处理,得到cmd (prometheus_msgs::PositionReference) 指令,发送给飞控使用。
主要部分包括:
- 主节点: planning_fsm.cpp
- 混合A*: kinodynamic_astar.cpp
- Bspline优化: bspline_optimizer.cpp
- 自动时间分配: non_uniform_bspline.cpp
- sdf地图: sdf_map.cpp global_point_sdf.cpp
- 轨迹处理: traj_server.cpp
fast fsm
文件目录: FastPlanner/plan_manage/src/planning_fsm.cpp
功能:
- 管理规划节点,运行planner状态机
- 安全性检查
- 订阅目标,发布规划的轨迹
参数:
nh.param("bspline/limit_vel", NonUniformBspline::limit_vel_, -1.0); // 速度限制
nh.param("bspline/limit_acc", NonUniformBspline::limit_acc_, -1.0); // 加速度限制
nh.param("bspline/limit_ratio", NonUniformBspline::limit_ratio_, -1.0); // 时间分配的安全约束
nh.param("fsm/flight_type", flight_type_, -1); //飞行模式,手动还是自动加载goal
nh.param("fsm/thresh_replan", thresh_replan_, -1.0); // 无人机单次规划起点距离限制
nh.param("fsm/thresh_no_replan", thresh_no_replan_, -1.0); // 重规划终点限制
nh.param("fsm/safety_distance", safety_distance, 0.3); //安全距离
nh.param("sdf_map/SDF_MODE", sdf_mode, 0); // sdf模式,如果为0,非增量式sdf;为1,fast_planner默认增量式sdf
订阅话题:
"/prometheus/planning/goal"
发布话题:
"/prometheus/planning/stop_cmd" // 当前是否安全的状态指令
"/prometheus/planning/bspline" // 规划出来的bspline轨迹
混合A*
文件目录: FastPlanner/path_searching/src/kinodynamic_astar.cpp
参数:
nh.param("search/max_tau", max_tau_, -1.0); //如果考虑对时间维度进行划分才设置,这里未设置
nh.param("search/init_max_tau", init_max_tau_, -1.0);
nh.param("search/max_vel", max_vel_, -1.0); // 速度限制
nh.param("search/max_acc", max_acc_, -1.0); // 加速度限制
nh.param("search/w_time", w_time_, -1.0); //
nh.param("search/horizon", horizon_, -1.0); //限制全局规划的距离,保证实时性
nh.param("search/resolution_astar", resolution_, -1.0); //空间分辨率
nh.param("search/time_resolution", time_resolution_, -1.0); // 时间维度分辨率
nh.param("search/lambda_heu", lambda_heu_, -1.0); // 启发函数权重
nh.param("search/margin", margin_, -1.0); //检测碰撞
nh.param("search/allocate_num", allocate_num_, -1); //最大节点数目
nh.param("search/check_num", check_num_, -1); //对中间状态安全检查
Bspline优化
文件目录:FastPlanner/bspline_opt/src/bspline_optimizer.cpp
参数:
nh.param("optimization/lamda1", lamda1_, -1.0); // 优化时加权参数
nh.param("optimization/lamda2", lamda2_, -1.0);
nh.param("optimization/lamda3", lamda3_, -1.0);
nh.param("optimization/lamda4", lamda4_, -1.0);
nh.param("optimization/lamda5", lamda5_, -1.0);
nh.param("optimization/dist0", dist0_, -1.0);
nh.param("optimization/dist1", dist1_, -1.0);
nh.param("optimization/max_vel", max_vel_, -1.0);
nh.param("optimization/max_acc", max_acc_, -1.0);
nh.param("optimization/max_iteration_num", max_iteration_num_, -1);
nh.param("optimization/algorithm", algorithm_, -1); // 最好的算法 40: SLSQP, 11:LBFGS
nh.param("optimization/order", order_, -1);
自动时间分配
文件目录:FastPlanner/bspline_opt/src/non_uniform_bspline.cpp
地图处理
文件目录:
FastPlanner/plan_env/src/sdf_map.cpp
FastPlanner/plan_env/src/global_point_sdf.cpp
功能: 1. 订阅点云数据 2. 处理点云数据并膨胀地图 3. 得到sdf地图
参数:
node_.param("sdf_map/origin_x", origin_(0), -20.0); //地图原点
node_.param("sdf_map/origin_y", origin_(1), -20.0);
node_.param("sdf_map/origin_z", origin_(2), 0.0);
node_.param("sdf_map/map_size_x", map_size_(0), 40.0); //地图大小边界
node_.param("sdf_map/map_size_y", map_size_(1), 40.0);
node_.param("sdf_map/map_size_z", map_size_(2), 5.0);
node_.param("sdf_map/resolution_sdf", resolution_sdf_, 0.2); //地图分辨率
node_.param("sdf_map/ceil_height", ceil_height_, 2.0); // 限高
node_.param("sdf_map/update_rate", update_rate_, 10.0); // 地图更新频率
node_.param("sdf_map/update_range", update_range_, 5.0); // 单次更新距离
node_.param("sdf_map/inflate", inflate_, 0.2); // 地图安全膨胀距离
订阅话题
"/prometheus/drone_odom" : 里程计话题
"/prometheus/planning/global_pcl": 全局坐标系下,点云数据
发布话题
"/sdf_map/inflate_cloud": 用于可视化的膨胀点云
样条轨迹处理&发布控制
文件目录:FastPlanner/plan_manage/src/traj_server.cpp
订阅话题:
"/prometheus/planning/bspline" : 由规划器生成的样条轨迹
"/prometheus/fast_planning/replan": 重规划标志
"/prometheus/drone_odom": 里程计数据
发布话题:
"/prometheus/planning/fastplanner/desired_trajecotry": 给无人机控制指令
"/prometheus/planning/traj": 显示轨迹
"/prometheus/planning/state": 显示运动
planning_mission.cpp
请查看局部规划算法文档中的介绍
使用激光雷达作为传感器
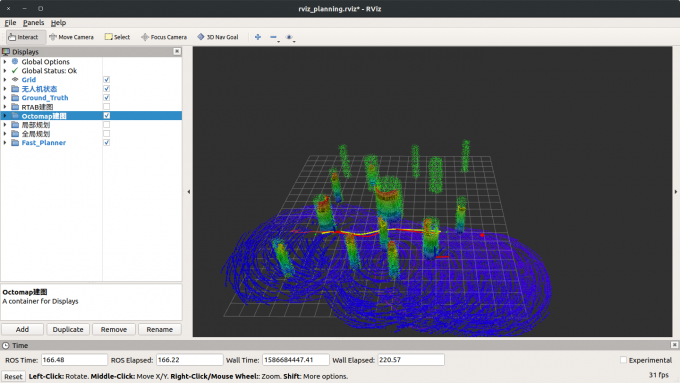
- 运行launch文件(请查看launch文件参数说明,并进行调整) roslaunch prometheus_gazebo sitl_fast_planning_3dlidar.launch
- 在打开的rviz窗口中勾选
Fast_Planner、Octomap_Mapping及Ground_Truth显示 - 输入3选择Fast Planner算法,无人机将自动起飞
- 在rviz中通过3D Nav Goal按钮指定目标点,点选该按钮后,同时按住鼠标左右键在rviz窗口中选择一点向上拉
- 红色线代表规划的路径,黄色线代表优化后的轨迹
- 也可以通过终端发布目标点
rostopic pub /prometheus/planning/goal ... - 通过终端查看算法相关信息
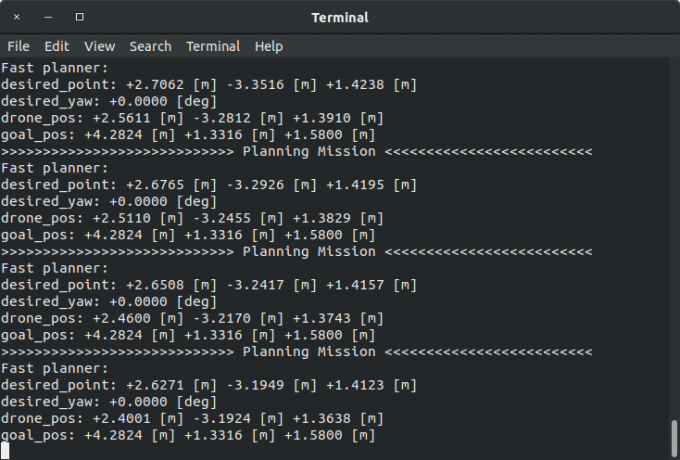
运行截图
使用RGBD相机作为传感器
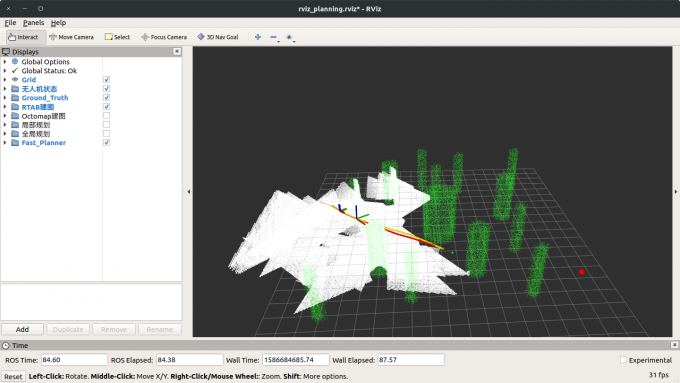
- 运行launch文件(请查看launch文件参数说明,并进行调整) roslaunch prometheus_gazebo sitl_fast_planning_rgbd.launch
- 在打开的rviz窗口中勾选
Fast_Planner,RTAB建图及Ground_Truth显示 - 其他同上
运行截图
[](https://imgchr.com/i/GOCvHf)
说明
- Fastplanner为轨迹追踪,需选择轨迹追踪控制器及对相关控制参数进行调试
- 修改参数配置文件
px4_pos_controller.yaml中controller_number参数为1(PID控制器)
- 修改参数配置文件
- 追踪新的轨迹时,无人机偶尔会出现倒退的现象,猜测原因:1 轨迹追踪超调 2 规划的轨迹略滞后于当前位置。暂未找到合适的解决方法