This repository has been archived by the owner on May 27, 2022. It is now read-only.
Visual Inertial Sensor Unit
-
Using Bluefox2 global shutter camera:
-
mvBlueFOX-MLC
accepts external hardware trigger
-
mvBlueFOX-MLC
-
Using Xsens MTi-10 series:
It can take in as well as generate trigger signals for Camera IMU synchronization
It can be easily replaceable with any hardware trigger generator IMU like razor IMU
Do not use an alternative like Loitor Cam2pc Visual-Inertial SLAM Sensor or Optor Visual-Inertial sensor.
These above two sensors have high drift in IMU with time
You can use Arduino based hardware clock sync:
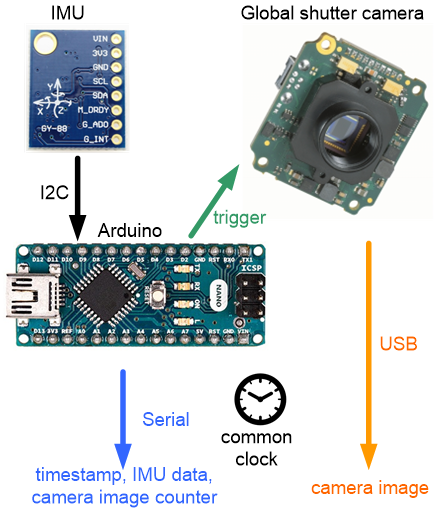
For this build, instruction are given here