DRLib:A concise deep reinforcement learning library, integrating HER and PER for almost off policy RL algos
A concise deep reinforcement learning library, integrating HER and PER for almost off policy RL algos. With tensorflow1.14 and pytorch, add HER and PER, core codes based on https://github.com/openai/spinningup
-
Clone the repo and cd into it:
git clone https://github.com/kaixindelele/DRLib.git cd DRLib -
Create anaconda DRLib_env env:
conda create -n DRLib_env python=3.6.9 source activate DRLib_env -
Install pip_requirement.txt:
pip install -r pip_requirement.txt
-
Install tensorflow-gpu=1.14.0
conda install tensorflow-gpu==1.14.0 # if you have a CUDA-compatible gpu and proper drivers -
Install torch torchvision
# CUDA 9.2 conda install pytorch==1.6.0 torchvision==0.7.0 cudatoolkit=9.2 -c pytorch # CUDA 10.1 conda install pytorch==1.6.0 torchvision==0.7.0 cudatoolkit=10.1 -c pytorch # CUDA 10.2 conda install pytorch==1.6.0 torchvision==0.7.0 cudatoolkit=10.2 -c pytorch # CPU Only conda install pytorch==1.6.0 torchvision==0.7.0 cpuonly -c pytorch # or pip install pip --default-timeout=100 install torch -i http://pypi.douban.com/simple --trusted-host pypi.douban.com [pip install torch 在线安装!非离线!](https://blog.csdn.net/hehedadaq/article/details/111480313)
-
Install mujoco and mujoco-py
refer to: https://blog.csdn.net/hehedadaq/article/details/109012048
-
Install gym[all]
refer to https://blog.csdn.net/hehedadaq/article/details/110423154
- Example 1. SAC-tf1-HER-PER with FetchPush-v1:
-
- modify params in arguments.py, choose env, RL-algorithm, use PER and HER or not, gpu-id, and so on.
-
- run with train_tf.py or train_torch.py
python train_tf.py
.
├── algos
│ ├── pytorch
│ │ ├── ddpg_sp
│ │ │ ├── core.py-------------It's copied directly from spinup, and modified some details.
│ │ │ ├── ddpg_per_her.py-----inherits from offPolicy.baseOffPolicy, can choose whether or not HER and PER
│ │ │ ├── ddpg.py-------------It's copied directly from spinup
│ │ │ ├── __init__.py
│ │ ├── __init__.py
│ │ ├── offPolicy
│ │ │ ├── baseOffPolicy.py----baseOffPolicy, can be used to DDPG/TD3/SAC and so on.
│ │ │ ├── norm.py-------------state normalizer, update mean/std with training process.
│ │ ├── sac_auto
│ │ ├── sac_sp
│ │ │ ├── core.py-------------likely as before.
│ │ │ ├── __init__.py
│ │ │ ├── sac_per_her.py
│ │ │ └── sac.py
│ │ └── td3_sp
│ │ ├── core.py
│ │ ├── __init__.py
│ │ ├── td3_gpu_class.py----td3_class modified from spinup
│ │ └── td3_per_her.py
│ └── tf1
│ ├── ddpg_sp
│ │ ├── core.py
│ │ ├── DDPG_class.py------------It's copied directly from spinup, and wrap algorithm from function to class.
│ │ ├── DDPG_per_class.py--------Add PER.
│ │ ├── DDPG_per_her_class.py----DDPG with HER and PER without inheriting from offPolicy.
│ │ ├── DDPG_per_her.py----------Add HER and PER.
│ │ ├── DDPG_sp.py---------------It's copied directly from spinup, and modified some details.
│ │ ├── __init__.py
│ ├── __init__.py
│ ├── offPolicy
│ │ ├── baseOffPolicy.py
│ │ ├── core.py
│ │ ├── norm.py
│ ├── sac_auto--------------------SAC with auto adjust alpha parameter version.
│ │ ├── core.py
│ │ ├── __init__.py
│ │ ├── sac_auto_class.py
│ │ ├── sac_auto_per_class.py
│ │ └── sac_auto_per_her.py
│ ├── sac_sp--------------------SAC with alpha=0.2 version.
│ │ ├── core.py
│ │ ├── __init__.py
│ │ ├── SAC_class.py
│ │ ├── SAC_per_class.py
│ │ ├── SAC_per_her.py
│ │ ├── SAC_sp.py
│ └── td3_sp
│ ├── core.py
│ ├── __init__.py
│ ├── TD3_class.py
│ ├── TD3_per_class.py
│ ├── TD3_per_her_class.py
│ ├── TD3_per_her.py
│ ├── TD3_sp.py
├── arguments.py-----------------------hyperparams scripts
├── drlib_tree.txt
├── HER_DRLib_exps---------------------demo exp logs
│ ├── 2021-02-21_HER_TD3_FetchPush-v1
│ │ ├── 2021-02-21_18-26-08-HER_TD3_FetchPush-v1_s123
│ │ │ ├── checkpoint
│ │ │ ├── config.json
│ │ │ ├── params.data-00000-of-00001
│ │ │ ├── params.index
│ │ │ ├── progress.txt
│ │ │ └── Script_backup.py
├── memory
│ ├── __init__.py
│ ├── per_memory.py--------------mofan version
│ ├── simple_memory.py-----------mofan version
│ ├── sp_memory.py---------------spinningup tf1 version, simple uniform buffer memory class.
│ ├── sp_memory_torch.py---------spinningup torch-gpu version, simple uniform buffer memory class.
│ ├── sp_per_memory.py-----------spinningup tf1 version, PER buffer memory class.
│ └── sp_per_memory_torch.py
├── pip_requirement.txt------------pip install requirement, exclude mujoco-py,gym,tf,torch.
├── spinup_utils-------------------some utils from spinningup, about ploting results, logging, and so on.
│ ├── delete_no_checkpoint.py----delete the folder where the experiment did not complete.
│ ├── __init__.py
│ ├── logx.py
│ ├── mpi_tf.py
│ ├── mpi_tools.py
│ ├── plot.py
│ ├── print_logger.py------------save the information printed by the terminal to the local log file。
│ ├── run_utils.py---------------now I haven't used it. I have to learn how to multi-process.
│ ├── serialization_utils.py
│ └── user_config.py
├── train_tf1.py--------------main.py for tf1
└── train_torch.py------------main.py for torch
Refer to these code bases:
-
It can be converged, but this code is too difficult. https://github.com/openai/baselines
-
It can also converged, but only for DDPG-torch-cpu. https://github.com/sush1996/DDPG_Fetch
-
It can not be converged, but this code is simpler. https://github.com/Stable-Baselines-Team/stable-baselines
种瓜得豆来解释her: 第一步在春天(state),种瓜(origin-goal)得豆,通过HER,把目标换成种豆,按照之前的操作,可以学会在春天种豆得豆; 第二步种米得瓜,学会种瓜得瓜; 即只要是智能体中间经历过的状态,都可以当做它的目标,进行学会。 即如果智能体能遍历所有的状态空间,那么它就可以学会达到整个状态空间。
https://www.bilibili.com/video/BV1BA411x7Wm
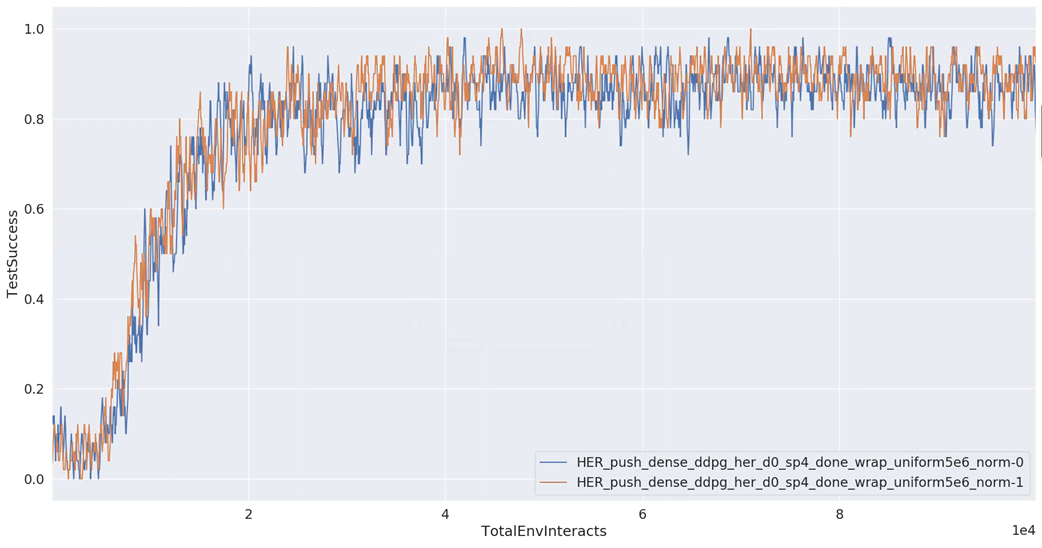
- state-normalize: success rate from 0 to 1 for FetchPush-v1 task.
- Q-clip: success rate from 0.5 to 0.7 for FetchPickAndPlace-v1 task.
- action_l2: little effect for Push task.