
- topological_navigation
- topological_navigation_msgs
- Maintainer: Francisco Martín [email protected]
- Author: Francisco Martín [email protected]
- License: BSD
- ROS Distro: Kinetic
- Dependencies:
- ROS Standard: roscpp, rospy, tf, geometry_msgs, std_msgs, sensor_msgs, nav_msgs, visualization_msgs, move_base_msgs, actionlib, actionlib_msgs, cv_bridge, costmap_2d, image_transport, roslint
- Internals:
- bica: https://gitlab.com/fmrico/bica.git
- bica_planning: https://gitlab.com/Intelligent-Robotics/bica_planning.git
- ROSPLan: https://gitlab.com/Intelligent-Robotics/ROSPlan.git
- pepper_navigation_bringup: https://gitlab.com/Intelligent-Robotics/pepper_navigation_bringup.git
- pepper_basic_capabilities: https://gitlab.com/Intelligent-Robotics/pepper_basic_capabilities.git
- rosweb_clientserver: https://gitlab.com/Intelligent-Robotics/rosweb_clientserver.git
This repository contains the topological navigation system. This system uses ROS's standard navigation system (move_base), which it uses to move the robot, through actions that move_base contains.
The topological navigation system establishes waypoints in the environment, which
are relevant positions for the operation of the robot. To move between waypoints in the
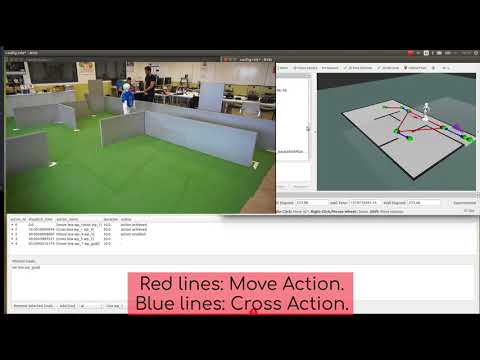
same room, the robot can perform a simple navigation action (move action) or, if it is
in different rooms that are connected without doors, by navigate action. In addition,
it establishes doors (composed of waypoints) in which the robot performs the action cross.
The topological navigation system also performs a translation between waypoints and their respective metric position, and vice versa, and the insertion in the knowledge base of the predicates that compose the topological map.
This system is used by setting the predicate (robot_at ?waypoint) in the planning
as goal or requirement, calculating the planner the sequence of move, navigate or cross
actions necessary to satisfy it.
Video of the system working:
- Types: waypoint, door, room
- Predicates:
- (door_connected ?d - door ?r1 ?r2 - room ?wp1 ?wp2 - waypoint)
- (free_connected ?r1 ?r2 - room)
- (robot_at ?wp - waypoint)
- (robot_at_room ?room - room)
- (waypoint_at ?wp - waypoint ?r - room)
- (door_opened ?d - door)
- Actions: navigate, cross, move
The functions of the topological_navigation_node are:
- Perform the translation between waypoints and their respective metric position, and vice versa, through the services that it implements.
- Set the PDDL predicates that encode the topological map. When the node is launched, the topological map information is loaded using
rosparam. This node reads them, storing the metric positions, and entering in the knowledge base the predicates that code the map.
This node loads a yaml file using rosparam containing a topological map. An example of an small map is at topological_navigation package, in src/test_topological_map.yaml.
None.
None.
- /topological_navigation/get_location (topological_navigation_msgs/GetLocation)
- /topological_navigation/set_location (topological_navigation_msgs/SetLocation)
This package contains 2 launch files:
- topological_navigation_alone.launch: This launcher is made for testing the package isolated. It launchs the tological_navigation_node and all the actions.
- topological_navigation.launch: This launcher is made for being integrated (via including) in a complete application. 2 args must be defined:
- pddl_domain_file: The absolute path of the domain file (the output of pddl_builder in package bica_planning)
- topological_map: The yaml file containing the definition of the topological map.