- dump1090.socket30003
Use your dump1090 to collect flight data and create a heatmap and rangeview.
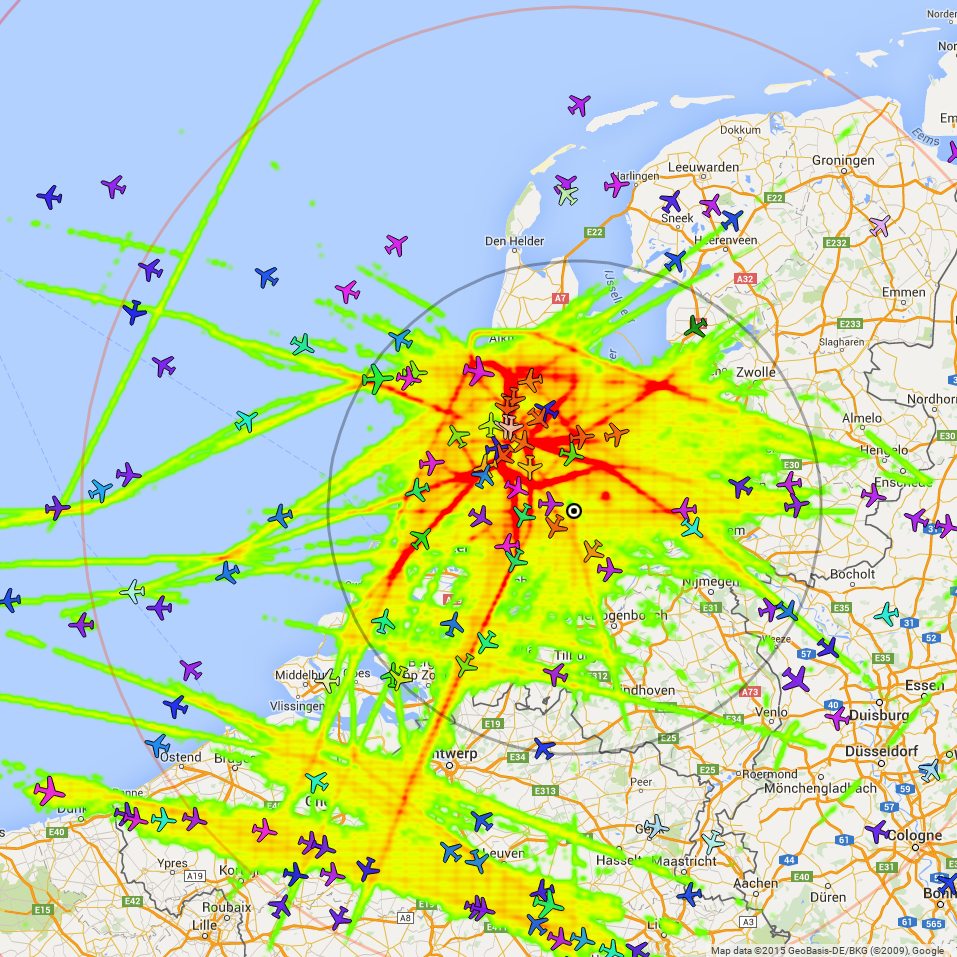
Heatmap. What are the flight paths through the air.
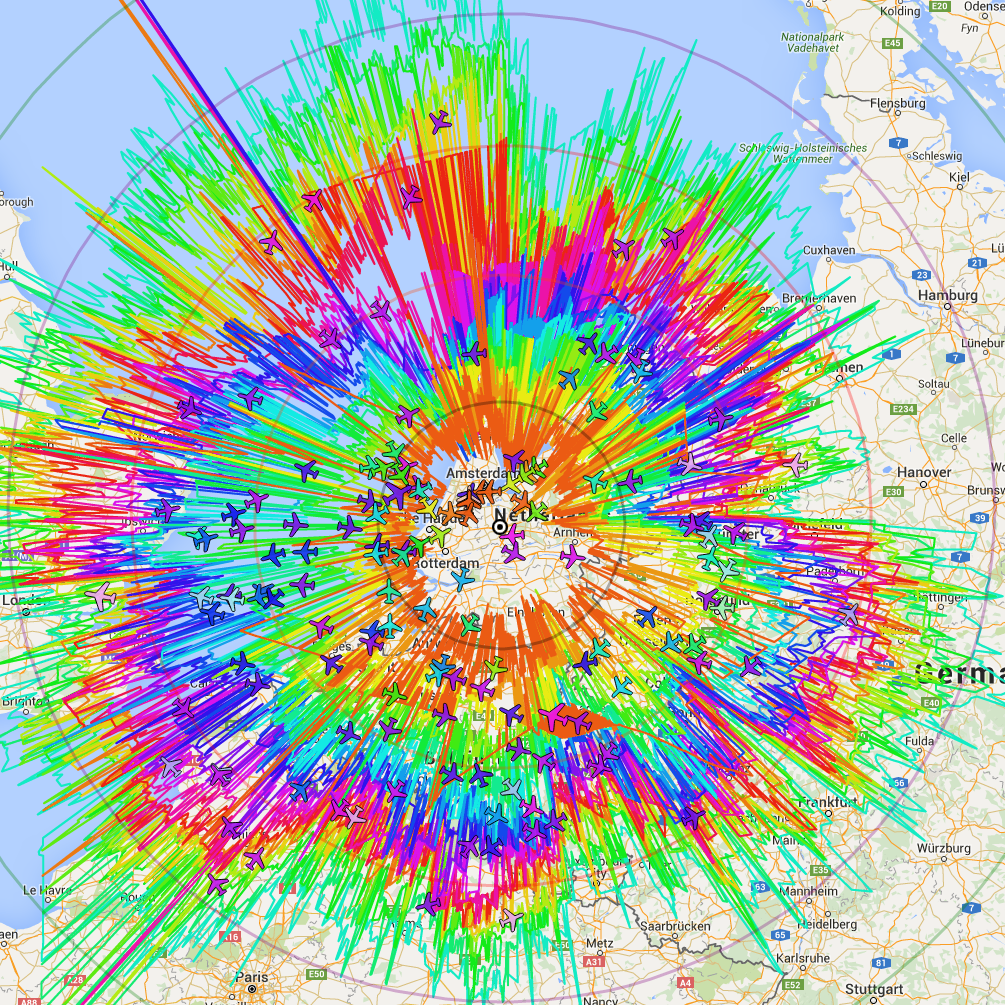
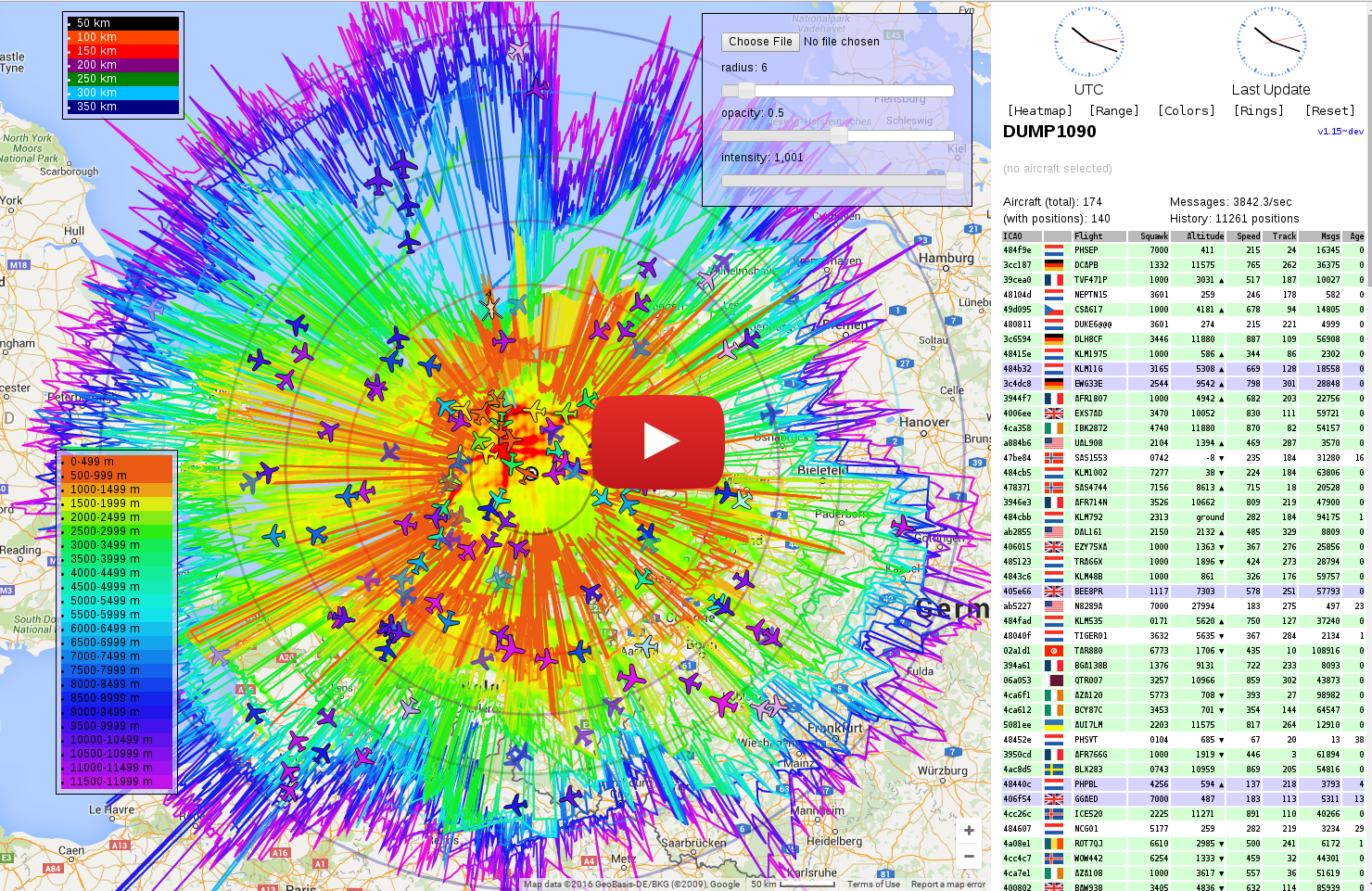
Rangeview. How far is the reach of your antenna.
Youtube video:
socket30003.pl
- Collects dump1090 flight positions (ADB-S format) using a tcp socket 30003 stream
and save them in csv format.
heatmap.pl
- Reads the flight positions from files in csv format and creates points for a heatmap.
- The heatmap shows where planes come very often. It makes common routes visable.
- Output in csv format (Google maps format).
rangeview.pl
- Reads the flight positions from files in csv format and creates a range/altitude view map.
- The range/altitude view shows the maximum range of your antenna for every altitude zone.
- KML output support (Google maps format).
install.pl
- Simpel installer script.
socket30003.cfg
- config file for socket30003.pl, heatmap.pl, rangeview.pl and install.pl
The output heatmapdata.csv and rangeview.kml can be displayed in a my modified variant of dump1090-mutability: https://github.com/tedsluis/dump1090
Read more about this at: http://discussions.flightaware.com/topic35844.html
This socket30003.pl script can retrieve flight data (like lat, lon and alt)
from a dump1090 host using port 30003 and calcutates the distance and
angle between the antenna and the plane. It will store these values in an
output file in csv format (seperated by commas) together with other flight
data.
This script can run several times simultaneously on one host retrieving
data from multiple dump1090 instances on different hosts. Each instance
can use the same directories, but they all have their own data, log and
pid files. And every day the script will create a new data and log file.
A data files contain column headers (with the names of the columns).
Columns headers like 'altitude', 'distance' and 'ground_speed' also contain
their unit between parentheses, for example '3520(feet)' or '12,3(kilometer)'.
This makes it more easy to parse the columns when using this data in other
scripts. Every time the script is (re)started a header wiil be written
in to the data file. This way it is possible to switch a unit, for
example from 'meter' to 'kilometer', and other scripts will still be able
to determine the correct unit type.
By default the position data, log files and pid file(s) will be stored in this format:
dump1090-<hostname/ip_address>-<YYMMDD>.txt
dump1090-<hostname/ip_address>-<YYMMDD>.log
dump1090-<hostname/ip_address>.pid
The script can be lauched as a background process. It can be stopped by
using the -stop parameter or by removing the pid file. When it not
running as a background process, it can also be stopped by pressing
CTRL-C. The script will write the current data and log entries to the
filesystem before exiting...
More info at:
http://discussions.flightaware.com/post180185.html#p180185
Syntax: socket30003.pl
Optional parameters:
-peer <peer host> A dump1090 hostname or IP address.
De default is the localhost, 127.0.0.1.
-restart Restart the script.
-stop Stop a running script.
-status Display status.
-data <data directory> The data files are stored in /tmp by default.
-log <log directory> The log file is stored in /tmp by default.
-pid <pid directory> The pid file is stored in /tmp by default.
-msgmargin <max message margin> The max message margin. The default is 10 ms.
-lon <lonitude> Location of your antenna.
-lat <latitude>
-distanceunit <unit> Type of unit for distance: kilometer,
nauticalmile, mile or meter
Default distance unit is kilometer.
-altitudeunit <unit> Type of unit for altitude: meter or feet.
Default altitude unit is meter.
-speedunit <unit> Type of unit for ground speed.
Default speed unit is kilometerph.
-nopositions Does not display the number of position while
running interactive (launched from commandline).
-debug Displays raw socket messages.
-verbose Displays verbose log messages.
-help This help page.
Notes:
- To launch it as a background process, add '&' or run it from crontab:
0 * * * * /home/tedsluis/git/dump1090.socket30003/socket30003.pl
(This command checks if it ran every hour and relauch it if nessesary.)
- The default values can be changed within the config file 'socket30003.cfg',
section [common] and/or [socket30003].
Examples:
socket30003.pl
socket30003.pl -log /var/log -data /home/pi -pid /var/run -restart &
socket30003.pl -peer 192.168.1.10 -nopositions -distanceunit nauticalmile -altitudeunit feet &
socket30003.pl -peer 192.168.1.10 -stop
Pay attention: to stop an instance: Don't forget to specify the same peer host.
- Default outputfile: /tmp/dump1090-192_168_11_34-150830.txt (dump1090--.txt)
hex_ident,altitude(meter),latitude,longitude,date,time,angle,distance(kilometer),squawk,ground_speed(kilometerph),track,callsign
484CB8,3906,52.24399,5.25500,2017/01/09,16:35:02.113,45.11,20.93,0141,659,93,KLM1833
406D77,11575,51.09984,7.73237,2017/01/09,16:35:02.129,111.12,212.94,,,,BAW256
4CA1D4,11270,53.11666,6.02148,2017/01/09,16:35:03.464,40.85,130.79,,842,81,RYR89VN
4B1A1B,3426,51.86971,4.14556,2017/01/09,16:35:03.489,-103.38,68.93,1000,548,352,EZS85TP
4CA79D,11575,51.95681,4.17119,2017/01/09,16:35:03.489,-98.28,64.41,1366,775,263,RYR43FH
hex_ident,altitude(feet),latitude,longitude,date,time,angle,distance(mile),squawk,ground_speed(mileph),track,callsign
48500,1416,52.53923,4.95834,2017/01/09,16:41:40.885,-15.42,51.21,1000,377,279,TRA5802
478690,11141,50.66931,3.43764,2017/01/09,16:41:40.886,-131.71,194.76,5325,542,37,SAS22K
34260E,10966,51.77884,5.07965,2017/01/09,16:41:40.888,-178.31,34.11,1114,522,214,IBE32HP
484558,5071,52.48020,4.22715,2017/01/09,16:41:40.892,-64.42,73.22,6260,459,303,KLM55U
4951B7,11270,52.78214,2.43583,2017/01/09,16:41:40.901,-74.55,195.81,2375,442,40,TAP766
note: As you can see it is possible to switch over to different type units for 'altitude', 'distance' and 'ground speed'!
This heatmap.pl script creates heatmap data
which can be displated in a modified variant of dump1090-mutobility.
It creates an output file with location data in csv format, which can
be imported using the dump1090 GUI.
Please read this post for more info:
http://discussions.flightaware.com/post180185.html#p180185
This script uses the data file(s) created by the 'socket30003.pl'
script, which are by default stored in '/tmp' in this format:
dump1090-<hostname/ip_address>-YYMMDD.txt
The script will automaticly use the correct units (feet, meter,
kilometer, mile, natical mile) for 'altitude' and 'distance' when
the input files contain column headers with the unit type between
parentheses. When the input files doesn't contain column headers
(as produced by older versions of 'socket30003.pl' script)
you can specify the units using startup parameters or in the config
file. Otherwise this script will use the default units.
This script will create a heatmap of a square area around your
antenna. You can change the default range by specifing the number
of degrees -/+ to your antenna locations. (The default values will
probably satisfy.) This area will be devided in to small squares.
The default heatmap has a resolution of 1000 x 1000 squares.
The script will read all the flight position data from the source
file(s) and count the times they match with a square on the heatmap.
The more positions match with a particular square on the heatmap,
the more the 'weight' that heatmap position gets. We use only the
squares with the most matches (most 'weight) to create the heatmap.
This is because the map in the browser gets to slow when you use
too much positions in the heatmap. Of cource this also depends on
the amount of memory of your system. You can change the default
number of heatmap positions. You can also set the maximum of
'weight' per heatmap position.
Syntax: heatmap.pl
Optional parameters:
-data <data directory> The data files are stored in
'/tmp' by default.
-log <log directory> The data files are stored in
'/tmp' by default.
-output <output The data files are stored in
directory> '/tmp' by default.
-file <filename> The output file name.
'heatmapdata.csv' by default.
-filemask <mask> Specify a filemask for the source data.
The default filemask is 'dump*.txt'.
-override Override output file if exists.
Default is 'no'.
-timestamp Add timestamp to output file name.
Default is 'no'.
-sequencenumber Add sequence number to output file name.
Default is 'no'.
-lon <lonitude> Location of your antenna.
-lat <latitude>
-maxpositions <max Maximum spots in the heatmap. Default is
positions> '100000' positions.
-maxweight <number> Maximum position weight. The default is
'1000'.
-resolution <number> Number of horizontal and vertical positions
in output file. Default is '1000',
which means '1000x1000' positions.
-degrees <number> To determine boundaries of area around the
antenna. (lat-degree <--> lat+degree) x
(lon-degree <--> lon+degree)
De default is '5' degree.
-debug Displays raw socket messages.
-verbose Displays verbose log messages.
-help This help page.
note:
The default values can be changed within the config file
'socket30003.cfg', section [common] and section [heatmap].
Examples:
heatmap.pl
heatmap.pl -data /home/pi -log /var/log
heatmap.pl -lat 52.1 -lon 4.1 -maxposition 50000
- Default output file: /tmp/heatmapdata.csv
"weight";"lat";"lon"
"1000";"52.397";"4.721"
"919";"52.389";"4.721"
"841";"52.405";"4.721"
"753";"52.413";"4.721"
"750";"52.517";"5.297"
"743";"52.317";"5.177"
"679";"51.925";"2.849"
"641";"51.853";"6.065"
"609";"51.229";"3.649"
This rangeview.pl script creates location data
for a range/altitude view which can be displated in a modified
fork of dump1090-mutobility.
The script creates two output files:
rangeview.csv) A file with location data in csv format can be
imported in to tools like http://www.gpsvisualizer.com.
rangeview.kml) A file with location data in kml format, which
can be imported into a modified dum1090-mutability.
Please read this post for more info:
http://discussions.flightaware.com/post180185.html#p180185
This script uses the output file(s) of the 'socket30003.pl'
script, which are by default stored in /tmp in this format:
dump1090-<hostname/ip_address>-YYMMDD.txt
It will read the files one by one and it will automaticly use
the correct units (feet, meter, mile, nautical mile of kilometer)
for 'altitude' and 'distance' when the input files contain
column headers with the unit type between parentheses. When
the input files doesn't contain column headers (as produced
by older versions of 'socket30003.pl' script) you can specify
the units.Otherwise this script will use the default units.
The flight position data is sorted in to altitude zones. For
each zone and for each direction the most remote location is
saved. The most remote locations per altitude zone will be
written to a file as a track.
Syntax: rangeview.pl
Optional parameters:
-data <data directory> The data files are stored in
'/tmp' by default.
-log <data directory> The log files are stored in
'/tmp' by default.
-output <output The output file is stored in
directory> '/tmp' by default.
-file <filename> The output file name. The extention
(.kml or .csv) determines the
file structure!
'rangeview.kml' by default.
-filemask <mask> Specify a filemask.
The default filemask is 'dump*.txt'.
-override Override output file if exists.
Default is 'no'.
-timestamp Add timestamp to output file name.
Default is 'no'.
-sequencenumber Add sequence number to output file name.
Default is 'no'.
-max <altitude> Upper limit. Default is '12000 meter'.
Higher values in the input data will be skipped.
-min <altitude> Lower limit. Default is '0 meter'.
Lower values in the input data will be skipped.
-directions <number> Number of compass direction (pie slices).
Minimal 8, maximal 7200. Default = '1440'.
-zones <number> Number of altitude zones.
Minimal 1, maximum 99.
Default = '24'.
-lon <lonitude> Location of your antenna.
-lat <latitude>
-distanceunit <unit>,[<unit>]
Type of unit: kilometer, nauticalmile,
mile or meter. First unit is for the
incoming source, the file(s) with flight
positions. The second unit is for the
output file. No unit means it is the
same as incoming.
Default distance unit's are:
'kilometer,kilometer'.
-altitudeunit <unit>[,<unit>]
Type of unit: feet or meter. First unit
is for the incoming source, the file(s)
with flight positions. The second unit
is for the output file. No unit means it
is the same as incoming.
Default altitude unit's are:
'meter,meter'.
-debug Displays raw socket messages.
-verbose Displays verbose log messages.
-help This help page.
notes:
- The default values can be changed within the config file 'socket30003.cfg'.
- The source units will be overruled in case the input file header contains unit information.
Examples:
rangeview.pl
rangeview.pl -distanceunit kilometer,nauticalmile -altitudeunit meter,feet
rangeview.pl -data /home/pi/data -log /home/pi/log -output /home/pi/result
- Default output file: /tmp/rangeview.csv
type,new_track,name,color,trackpoint,altitudezone,destination,hex_ident,Altitude(meter),latitude,longitude,date,time,angle,distance(kilometer)
T,1,Altitude zone 1: 00000- 500,7fffff00,1, 0,-718,484646,357,52.00493,5.08865,2017/01/10,10:46:15.738,-179.72,8
T,0,Altitude zone 1: 00000- 500,7fffff00,2, 0,-717,484646,357,52.00616,5.08808,2017/01/10,10:46:17.164,-179.32,8
T,0,Altitude zone 1: 00000- 500,7fffff00,3, 0,-714,484646,357,52.00788,5.08722,2017/01/10,10:46:19.740,-178.7,8
T,0,Altitude zone 1: 00000- 500,7fffff00,4, 0,-713,484646,357,52.00914,5.08667,2017/01/10,10:46:21.041,-178.28,8
T,0,Altitude zone 1: 00000- 500,7fffff00,5, 0,-711,484646,357,52.01039,5.08604,2017/01/10,10:46:22.622,-177.79,8
T,0,Altitude zone 1: 00000- 500,7fffff00,6, 0,-709,484646,357,52.01125,5.08560,2017/01/10,10:46:23.892,-177.44,8
T,0,Altitude zone 1: 00000- 500,7fffff00,7, 0,-708,484646,357,52.01230,5.08518,2017/01/10,10:46:25.244,-177.09,8
T,0,Altitude zone 1: 00000- 500,7fffff00,8, 0,-706,484646,357,52.01335,5.08461,2017/01/10,10:46:26.625,-176.62,8
T,0,Altitude zone 1: 00000- 500,7fffff00,9, 0,-704,484646,357,52.01463,5.08400,2017/01/10,10:46:28.031,-176.09,7
T,0,Altitude zone 1: 00000- 500,7fffff00,10, 0,-702,484646,357,52.01579,5.08345,2017/01/10,10:46:29.475,-175.59,7
T,0,Altitude zone 1: 00000- 500,7fffff00,11, 0,-700,484646,357,52.01683,5.08293,2017/01/10,10:46:30.940,-175.11,7
- Default output file: /tmp/rangeview.kml
<?xml version="1.0" encoding="UTF-8"?>
<kml xmlns="http://www.opengis.net/kml/2.2">
<Document>
<name>Paths</name>
<description>Example</description>
<Style id="track-1">
<LineStyle>
<color>ff135beb</color>
<width>2</width>
</LineStyle>
<PolyStyle>
<color>ff135beb</color>
</PolyStyle>
</Style>
<Placemark>
<name>1</name>
<description>00000- 500</description>
<styleUrl>#track-1</styleUrl>
<LineString>
<altitudeMode>absolute</altitudeMode>
<coordinates>
5.08865,52.00493,357
5.08808,52.00616,357
5.08722,52.00788,357
5.08667,52.00914,357
5.08604,52.01039,357
5.08560,52.01125,357
5.08518,52.01230,357
5.08461,52.01335,357
5.08400,52.01463,357
5.08345,52.01579,357
5.08293,52.01683,357
etc..
This install.pl script installs the socket30003 scripts.
It will create the directories, copy the files, check and set the permissions.
In case of an update, it will backup the original config file and add new
parameters if applicable.
Please read this post for more info:
http://discussions.flightaware.com/post180185.html#p180185
Syntax: install.pl
Optional parameters:
-install <install The script will be installed in
directory> '/home/pi/socket30003' by default.
-data <data directory> The data files will be stored in
'/tmp' by default.
-log <data directory> The log files will be stored in
'/tmp' by default.
-output <output The output files will be stored in
directory> '' by default.
-pid <pid directory> The pid files will be stored in
'/tmp'.
-debug Displays raw socket messages.
-verbose Displays verbose log messages.
-help This help page.
Examples:
install.pl
install.pl -install /user/share/socket30003
install.pl -data /home/pi/data -log /home/pi/log -output /home/pi/result
Follow these steps for the use of the scripts.
$ cd
$ mkdir git
$ cd git
$ git clone https://github.com/tedsluis/dump1090.socket30003.git
note: be sure 'git' is installed (sudo apt-get install git)
The best thing is to leave it as much as it is. May change some directories of the unit types (meters, kilometers, miles, feets, nautical miles etc).
$ cd dump1090.socket30003
$ vi socket.cfg (or use an other editor)
Files wil be copied to the install directory.
$ ./install.pl
The files are now installed in the install directory from where you should use the scripts.
Of cource you can run 'socket30003.pl' from teh commandline, but if you want to leave it running for days or weeks you should add it as a crontab job.
$ sudo crontab -e
*/5 * * * * sudo /home/pi/socket30003/socket30003.pl
note: script will start every 5 minutes if it is not running anymore.
Wait at least a view minutes and then:
$ cat /tmp/*dump1090*.log | less
$ cat /tmp/*dump1090*.txt | less
Process the flight data and create a heatmap.
Wait a couple of days to be sure you have enough data.
$ cd
$ cd socket30003
$ ./heatmap
10Jan17 17:20:32 pid=6403 I pi Log file: '/tmp/heatmap-170110.log'
10Jan17 17:20:32 pid=6403 I pi There will be no more then '50000' positions in the output file.
10Jan17 17:20:32 pid=6403 I pi The maximum position weight will be not more then '1000'.
10Jan17 17:20:32 pid=6403 I pi Output file: '/tmp/heatmapdata.csv'
10Jan17 17:20:32 pid=6403 I pi The resolution op the heatmap will be 1000x1000.
10Jan17 17:20:32 pid=6403 I pi The antenna latitude & longitude are: '52.01','5.01'.
10Jan17 17:20:32 pid=6403 I pi The heatmap will cover the area of 5 degree around the antenna, which is between latitude 47 - 57 and longitude 0 - 10.
10Jan17 17:20:32 pid=6403 I pi The following files in directory '/tmp' fit with the filemask '*dump*.txt*':
10Jan17 17:20:32 pid=6403 I pi /tmp/dump1090-ted1090-5-170110.txt
10Jan17 17:20:32 pid=6403 I pi /tmp/dump1090-ted1090-5-170109.txt
10Jan17 17:20:32 pid=6403 I pi Processing file '/tmp/dump1090-ted1090-5-170110.txt':
10Jan17 17:22:12 pid=6403 I pi -header units:altitude=meter,distance=kilometer,ground_speed=kilometerph, position 1-1369896 processed. 339 positions were out side the specified area.
10Jan17 17:22:12 pid=6403 I pi Processing file '/tmp/dump1090-ted1090-5-170109.txt':
10Jan17 17:22:55 pid=6403 I pi -header units:altitude=meter,distance=kilometer,ground_speed=kilometerph, position 1-580075 processed. 118 positions were out side the specified area.
10Jan17 17:22:57 pid=6403 I pi Number of sorted heatmap positions: 208056
10Jan17 17:23:02 pid=6403 I pi The highest weight is '00001259' and the lowest weight is '00000010'.
10Jan17 17:23:02 pid=6403 I pi Since the highest weight is more the the max weight '1000' the weight of all points will be multiplied with a factor 0.79428117553614.
10Jan17 17:23:04 pid=6403 I pi 50000 rows with heatmap position data processed!
You can find the result in '/tmp/heatmap.csv'.
Process the flight data and create a rangeview.
Be sure you have have collected data for a couple of days!
$ cd
$ cd socket30003
$ ./rangview.pl
10Jan17 20:30:38 pid=8562 I pi Log file: '/tmp/rangeview-170110.log'
The altitude will be converted from 'meter' to 'meter'.
The distance will be converted from 'kilometer' to 'kilometer.
10Jan17 20:30:38 pid=8562 I pi Output file: '/tmp/rangeview.csv'
10Jan17 20:30:38 pid=8562 I pi The maximum altitude is 12000 meter.
10Jan17 20:30:38 pid=8562 I pi The minimal altitude is 0 meter.
10Jan17 20:30:38 pid=8562 I pi The number of compass directions (pie slices) is 1440.
10Jan17 20:30:38 pid=8562 I pi The number of altitude zones is 24.
10Jan17 20:30:38 pid=8562 I pi The latitude/longitude location of the antenna is: 52.085624,5.0890591.
10Jan17 20:30:38 pid=8562 I pi An altitude zone is 500 meter.
10Jan17 20:30:38 pid=8562 I pi The following files fit with the filemask '*dump*.txt*':
10Jan17 20:30:38 pid=8562 I pi /tmp/dump1090-ted1090-5-170110.txt
10Jan17 20:30:38 pid=8562 I pi /tmp/dump1090-ted1090-5-170109.txt
10Jan17 20:30:38 pid=8562 I pi processing '/tmp/dump1090-ted1090-5-170110.txt':
10Jan17 20:32:47 pid=8562 I pi -header units:altitude=meter,distance=kilometer,ground_speed=kilometerph, position 1-1591682. processed.
10Jan17 20:32:47 pid=8562 I pi processing '/tmp/dump1090-ted1090-5-170109.txt':
10Jan17 20:33:33 pid=8562 I pi -header units:altitude=meter,distance=kilometer,ground_speed=kilometerph, position 1-580075. processed.
10Jan17 20:33:33 pid=8562 I pi Number of files read: 2
10Jan17 20:33:33 pid=8562 I pi Number of position processed: 2171757 and positions within range processed: 2060038
10Jan17 20:33:35 pid=8562 I pi 1,Altitude zone: 0- 499,Directions: 406/ 1440,Positions processed: 8128,Positions processed per direction: min: 1,max: 545,avg: 5,real avg: 20
10Jan17 20:33:35 pid=8562 I pi 2,Altitude zone: 500- 999,Directions: 524/ 1440,Positions processed: 33499,Positions processed per direction: min: 0,max: 778,avg: 23,real avg: 64
10Jan17 20:33:35 pid=8562 I pi 3,Altitude zone: 1000- 1499,Directions: 734/ 1440,Positions processed: 37874,Positions processed per direction: min: 0,max: 766,avg: 26,real avg: 51
10Jan17 20:33:35 pid=8562 I pi 4,Altitude zone: 1500- 1999,Directions: 1114/ 1440,Positions processed: 40865,Positions processed per direction: min: 2,max: 627,avg: 28,real avg: 36
10Jan17 20:33:35 pid=8562 I pi 5,Altitude zone: 2000- 2499,Directions: 1241/ 1440,Positions processed: 45281,Positions processed per direction: min: 23,max: 618,avg: 31,real avg: 36
10Jan17 20:33:35 pid=8562 I pi 6,Altitude zone: 2500- 2999,Directions: 1299/ 1440,Positions processed: 40231,Positions processed per direction: min: 29,max: 670,avg: 27,real avg: 30
10Jan17 20:33:35 pid=8562 I pi 7,Altitude zone: 3000- 3499,Directions: 1373/ 1440,Positions processed: 55566,Positions processed per direction: min: 18,max: 469,avg: 38,real avg: 40
10Jan17 20:33:36 pid=8562 I pi 8,Altitude zone: 3500- 3999,Directions: 1410/ 1440,Positions processed: 42652,Positions processed per direction: min: 16,max: 292,avg: 29,real avg: 30
10Jan17 20:33:36 pid=8562 I pi 9,Altitude zone: 4000- 4499,Directions: 1387/ 1440,Positions processed: 42639,Positions processed per direction: min: 4,max: 222,avg: 29,real avg: 30
10Jan17 20:33:36 pid=8562 I pi 10,Altitude zone: 4500- 4999,Directions: 1374/ 1440,Positions processed: 45339,Positions processed per direction: min: 20,max: 267,avg: 31,real avg: 33
10Jan17 20:33:36 pid=8562 I pi 11,Altitude zone: 5000- 5499,Directions: 1356/ 1440,Positions processed: 43614,Positions processed per direction: min: 18,max: 322,avg: 30,real avg: 32
10Jan17 20:33:36 pid=8562 I pi 12,Altitude zone: 5500- 5999,Directions: 1322/ 1440,Positions processed: 42356,Positions processed per direction: min: 11,max: 330,avg: 29,real avg: 32
10Jan17 20:33:36 pid=8562 I pi 13,Altitude zone: 6000- 6499,Directions: 1388/ 1440,Positions processed: 45874,Positions processed per direction: min: 12,max: 623,avg: 31,real avg: 33
10Jan17 20:33:36 pid=8562 I pi 14,Altitude zone: 6500- 6999,Directions: 1275/ 1440,Positions processed: 47050,Positions processed per direction: min: 17,max: 686,avg: 32,real avg: 36
10Jan17 20:33:36 pid=8562 I pi 15,Altitude zone: 7000- 7499,Directions: 1301/ 1440,Positions processed: 55586,Positions processed per direction: min: 28,max: 686,avg: 38,real avg: 42
10Jan17 20:33:36 pid=8562 I pi 16,Altitude zone: 7500- 7999,Directions: 1411/ 1440,Positions processed: 45161,Positions processed per direction: min: 26,max: 514,avg: 31,real avg: 32
10Jan17 20:33:36 pid=8562 I pi 17,Altitude zone: 8000- 8499,Directions: 1416/ 1440,Positions processed: 44739,Positions processed per direction: min: 13,max: 567,avg: 31,real avg: 31
10Jan17 20:33:37 pid=8562 I pi 18,Altitude zone: 8500- 8999,Directions: 1415/ 1440,Positions processed: 56940,Positions processed per direction: min: 43,max: 829,avg: 39,real avg: 40
10Jan17 20:33:37 pid=8562 I pi 19,Altitude zone: 9000- 9499,Directions: 1440/ 1440,Positions processed: 101448,Positions processed per direction: min: 96,max: 479,avg: 70,real avg: 70
10Jan17 20:33:37 pid=8562 I pi 20,Altitude zone: 9500- 9999,Directions: 1422/ 1440,Positions processed: 69574,Positions processed per direction: min: 59,max: 428,avg: 48,real avg: 48
10Jan17 20:33:37 pid=8562 I pi 21,Altitude zone: 10000- 10499,Directions: 1440/ 1440,Positions processed: 181891,Positions processed per direction: min: 112,max: 748,avg: 126,real avg: 126
10Jan17 20:33:37 pid=8562 I pi 22,Altitude zone: 10500- 10999,Directions: 1440/ 1440,Positions processed: 363296,Positions processed per direction: min: 177,max: 1431,avg: 252,real avg: 252
10Jan17 20:33:37 pid=8562 I pi 23,Altitude zone: 11000- 11499,Directions: 1440/ 1440,Positions processed: 226620,Positions processed per direction: min: 178,max: 2577,avg: 157,real avg: 157
10Jan17 20:33:37 pid=8562 I pi 24,Altitude zone: 11500- 11999,Directions: 1440/ 1440,Positions processed: 343815,Positions processed per direction: min: 240,max: 975,avg: 238,real avg: 238
You can find the result in '/tmp/rangview.kml'.
Be sure you have my version of dump1090 mutability installed: https://github.com/tedsluis/dump1090
Copy the 'heatmap.csv' to '/usr/share/dump1090-mutability/html/'
$ sudo cp /tmp/heatmap.csv /usr/share/dump1090-mutability/html/heatmapdata.csv
Optional: change the name and the path of the heatmap within '/usr/share/dump1090-mutability/html/config.js'.
Refresh the dump1090 web GUI and toggle the [heatmap] button.
Be sure you have my version of dump1090 mutability installed: https://github.com/tedsluis/dump1090
Copy the 'rangview.kml' to a webserver where it can be publicly accessed (nessesary for the Google maps API).
You can use Github, dropbox of Google drive to share the 'rangeview.kml' publicly.
Edit and fill in the URL of the rangeview.kml after 'UserMap='.
$ sudo vi /usr/share/dump1090-mutability/html/config.js
Refresh the dump1090 web GUI and toggle the [rangeview] button.