代码运行环境: Python 3.6.3
下载本仓库并安装相关包:
git clone https://github.com/techkang/postgraduate
cd postgraduate
pip3 install -r requirements.txt
├── result(存放相关结果)
│ └── ...
├── code (代码)
│ ├── calibration.py (单目标定、校正)
│ ├── draw.py (推导视差公式时绘图的代码)
│ ├── main.py (单、双目标定、校正及测距)
│ └── stereo_calibration.py (双目标定、校正)
├── left (测试图片)
│ ├── left01.jpg
│ ├── ...
│ └── left14.jpg
├── README.md
├── right (测试图片)
│ ├── right01.jpg
│ ├── ...
│ └── right14.jpg
└── requirements.txt
cd code
python3 calibration.py [file]
其中,file 是可选参数,默认为 01,表示对 left 文件夹中 left01.jpg 图像进行标定。可以指定其他值对left文件夹中的图片进行标定(注意0不能省略)。
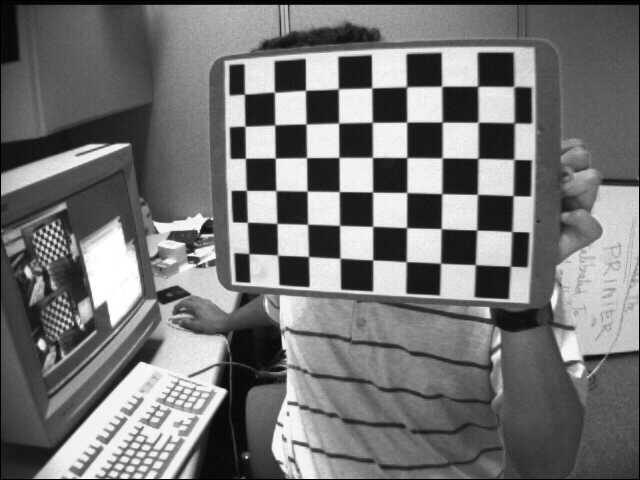
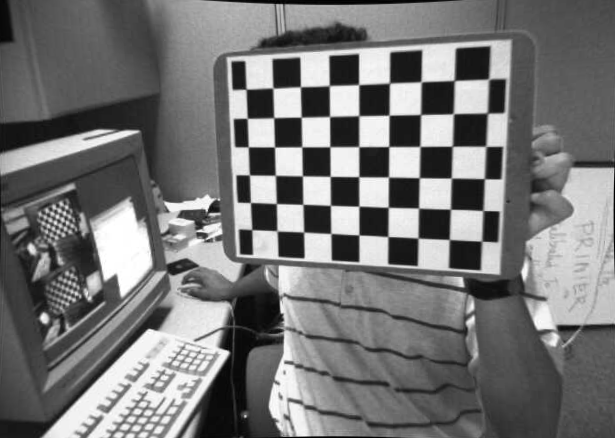
以 left01.jpg 为例,原图和修正后的图像如下:
cd code
python3 stereo_calibration.py [file]
其中,file 是可选参数,默认为 01,表示对 left 文件夹中 left01.jpg 图像和 right 文件夹中的 right01.jpg 图像进行标定。可以指定其他值对left和right文件夹中的图片进行标定(注意0不能省略)。
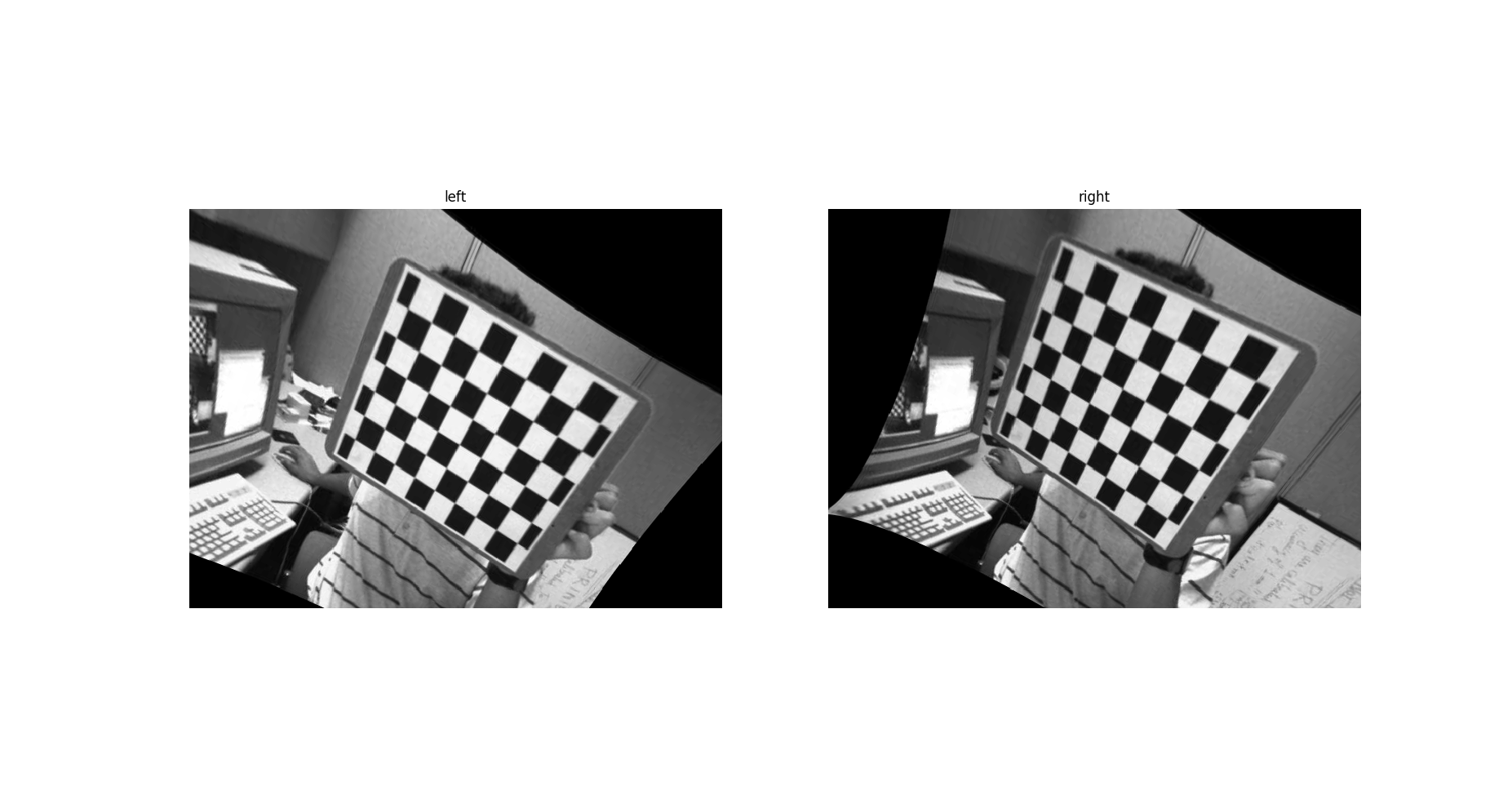
运行程序,输出对指定图片双目标定的结果,同时将结果保存在result/stereo_calibresult/文件夹下。本节代码未能按照预期的结果运行,输出照片发生了明显的旋转。以 left01.jpg 和 right01.jpg 为例,输出结果如图所示:
经过分析,发现 OpenCV 一般不能很好的标定双目图像,故使用 MATLAB 先标定图像,例如 left01 和 right01 的 R (旋转矩阵)和 T (平移矩阵)如下:
| R | T | ||
|---|---|---|---|
| 1 | -0.0032 | -0.0057 | -83.0973 |
| 0.0033 | 0.9999 | 0.0096 | 1.0605 |
| 0.0057 | -0.0097 | 0.9999 | 0.0392 |
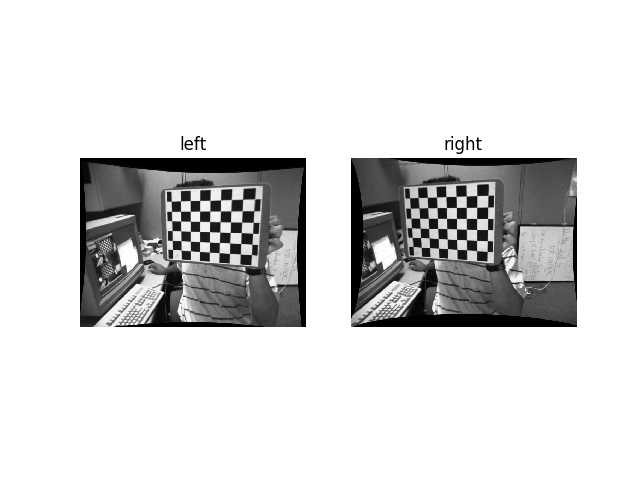
在程序中修改代码,手动指定 R 和 T 的值,运行程序,输出校正后的图像如下:
本函数可以同时实现单目标定、双目标定和校正,以及测距。
cd code
python3 mian.py [--key=value]
其中,[--key=value]是可选参数,可选择的值、含义及其默认值如下:
sample = '01' # 测试图片
disp_calib = False # 是否展示单目校正结果
stereo_calib = True # 是否进行双目校正
disp_stereo_calib = False # 是否展示双目校正结果
disparity = True # 是否利用视差估算距离
R = dict({'01': np.array([[1, -0.0032, -0.005], [0.0033, 0.9999, 0.0096],
[0.0057, -0.0097, 0.9999]])}) # 由 MATLAB 标定的旋转矩阵
T = dict({'01': np.array([-83.0973, 1.0605, 0.0392])}) # 由 MATLAB 标定的平移矩阵
matlab = True # 在双目校正时是否使用 matlab 标定的值
num = 3 # StereoSGBM_create 函数参数:最小可能的差异值
blockSize = 5 # StereoSGBM_create 函数参数:匹配的块大小。
例如,输入命令python3 main.py --disp_calib=True,可以在测距的同时,还会输出单目测距的结果。如果保持默认值,则会对 left01 和 right01 图像进行测距,不输出单目校正和双目校正的结果,使用由 MATLAB 标定的旋转矩阵和平移矩阵。
按照默认参数,输出结果如图:

点击左图,可以在命令行中输出该点的深度,然而,无论是从输出结果,还是右边的视差图,都离预期结果相差较远。点击左图时发现,经常有些点为负值。右图视差图中,标定板的视差应该相近,为一个平滑的渐变颜色,然而视差图没有体现出这一点。