{kind=link}
{kind=link}
{kind=link}
Esse trabalho é baseado nesse TCC.
Cada agente possui a predisposição de agir de forma corrupta ou não, caso um agente corrupto tiver um vizinho não corrupto, o agente corrupto é denunciado. Após certo número de denuncia o agente será preso. Os agentes entretanto não sabem quantas vezes foram denunciados ou quantas vezes podem praticar corrupção sem serem presos. Isso faz com que não saibam a probabilidade real de serem capturados, aumentando gradualmente sua taxa de corrupção.
Para formular sua decisão, primeiramente, o agente verifica a probabilidade de se deparar com um agente corrupto a partir de suas experiências passadas. Dada uma memória de tamanho N, A = n / N. Onde A é sua expectativa de encontrar um agente corrupto e n o número de vezes que encontrou um agente corrupto no passado. A percepção de sua probabilidade de ser capturado é dada por B=m/M, onde m é a quantidade de agentes de sua vizinhança que foram presos e M é a quantidade de agentes que atuaram de forma corrupta. (COSTA, 2014)
Na implementação temos que cada HumanAgent tem que se comunicar com seus vizinhos para obtenção de alguns parâmetros de tomada de decisão. Ao final todo os agentes tem de se comunicar com o agente Space, a medida que a comunicação com seus vizinhos for finalizada.
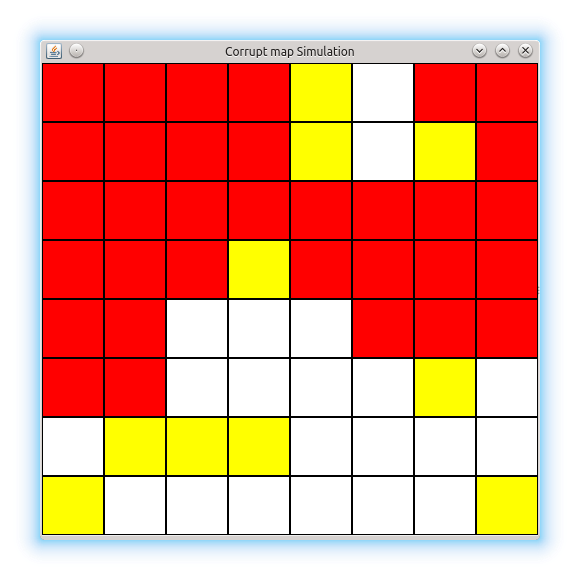
- Vermelhos: Corruptos
- Brancos: Honestos
- Amarelos: Presos
A imagem acima mostra um exemplo de simulação, com parâmetros de justiça elevados. Os parâmetros da simulação estão em HumanAgent.
Basta executar em dois terminais diferentes os seguintes comandos:
mvn -Pjade-main exec:java
mvn -Pjade-agent exec:java
No primeiro temos a instanciação do container do jade, no segundo a execução do agente Space.
Abra uma issue, crie uma branch e envie seu pull request. Dúvidas podem ser tiradas via issues também!
http://www.cs.sjsu.edu/~pearce/modules/lectures/eco2/ca/corruption.htm