We use a multi-system setup for controlling the Hello Stretch, where low-level control runs on the "Robot" and large neural nets are evaluated on a "Workstation" -- which here refers to a local computer with a GPU. For best performance, your Workstation should be on the same wireless network as the Robot, preferrably with an ethernet connection to the router for lowest latency.
roslaunch home_robot_hw startup_stretch_hector_slam.launchSee examples for common API usage.
You can also start an interactive command line interface (CLI) with:
python -m home_robot_hw.remote.interactive_cliLet ROBOT_IP store the robot's IP and let WORKSTATION_IP store the workstation's IP. If your local network doesn't have access to internet we recommend using rsync with --update flag to sync your code changes across the machines. Usage:
rsync -rvu /abs/path/to/local/home-robot $ROBOT_USER@$ROBOT_IP:/abs/path/to/remote/home-robot
The above command will do a recursive updating of changed files while echoing a verbose output.
We provide scripts to collect data in H5 format using Recorder class. Follow the instructions for recording these files. If your application needs more/fewer data-sources, sub-class Recorder and over-ride the save_frame method
Collect the data through teleoperation.
python collect_h5.py --task_name TASK_NAME --dir_path DIR_PATHThis will save the teleoperation files at DIR_PATH/TASK_NAME-{iteration}/{datetime}.h5.
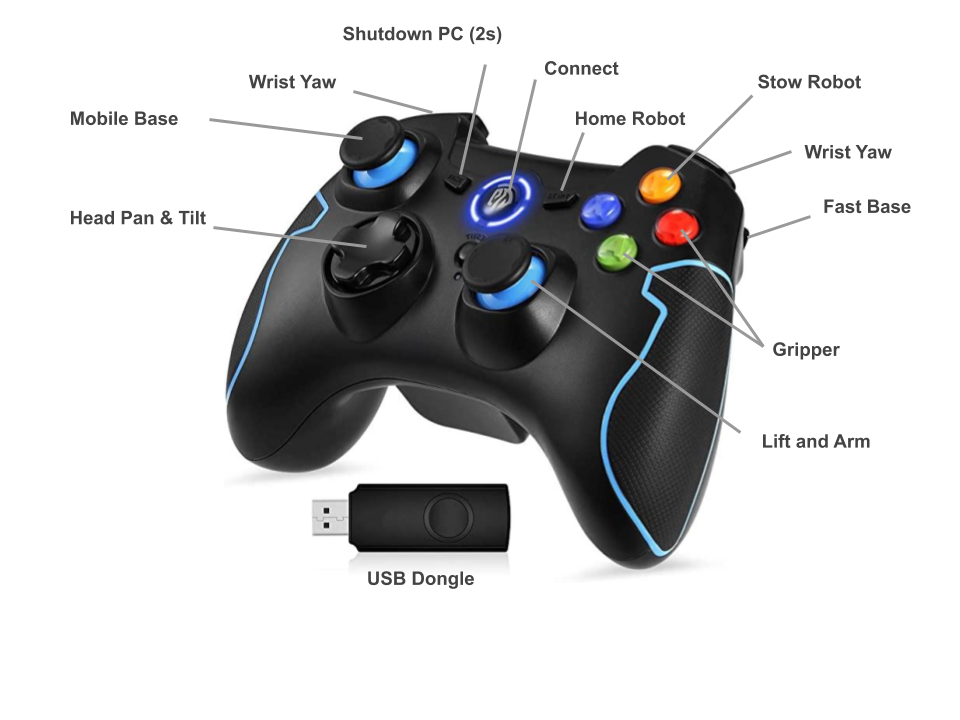
Turn on the controller and make sure it is connected to the robot (top two blue lights should be on). To give trajectory commands through the Xbox controller, open a separate terminal and:
rosrun joy joy_nodeRefer to official hello robot keybindings to learn how to operate Stretch with the controller. We also provide a Dataloaders to load data into torch (WIP).
{kind=link}