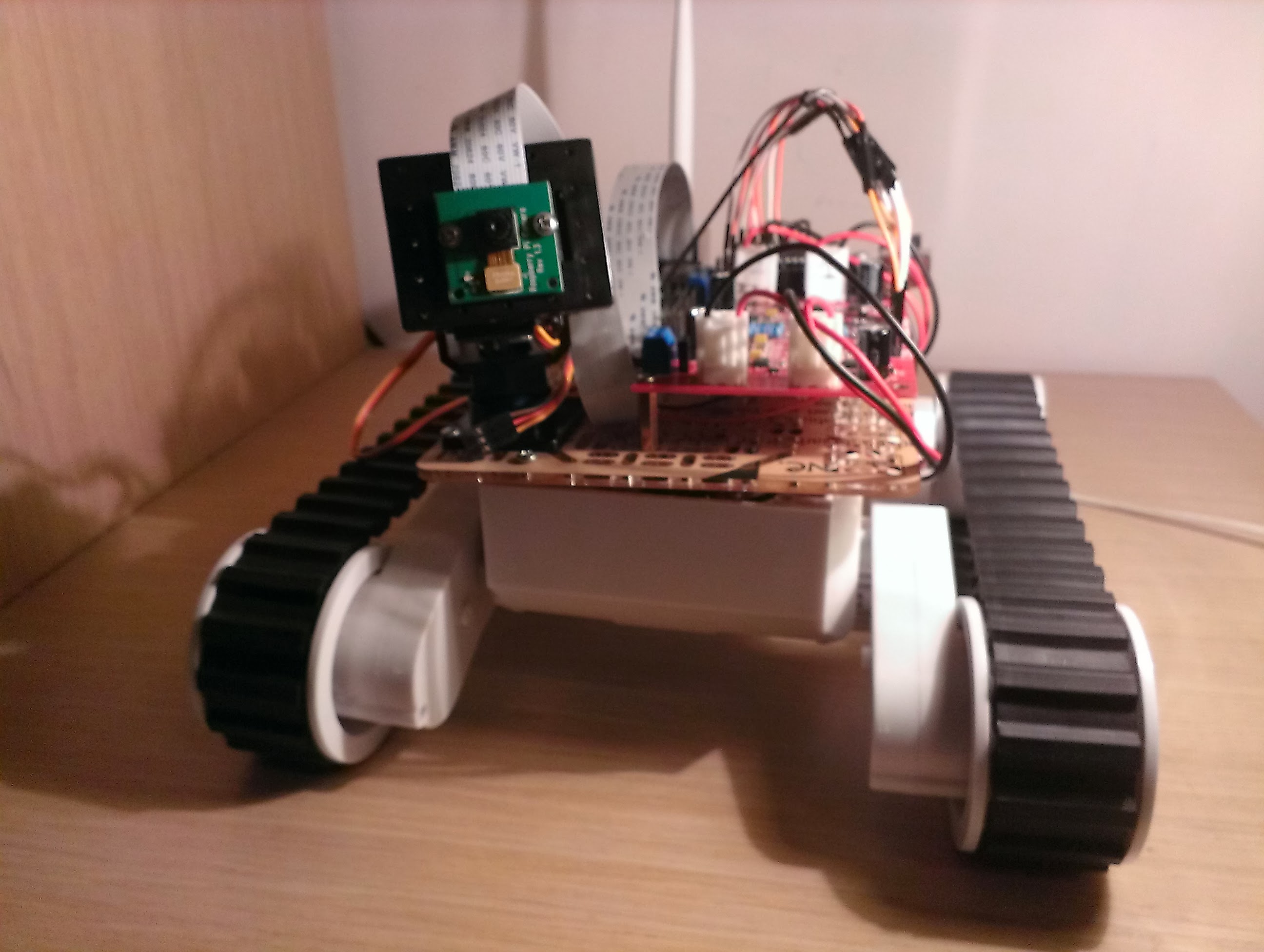
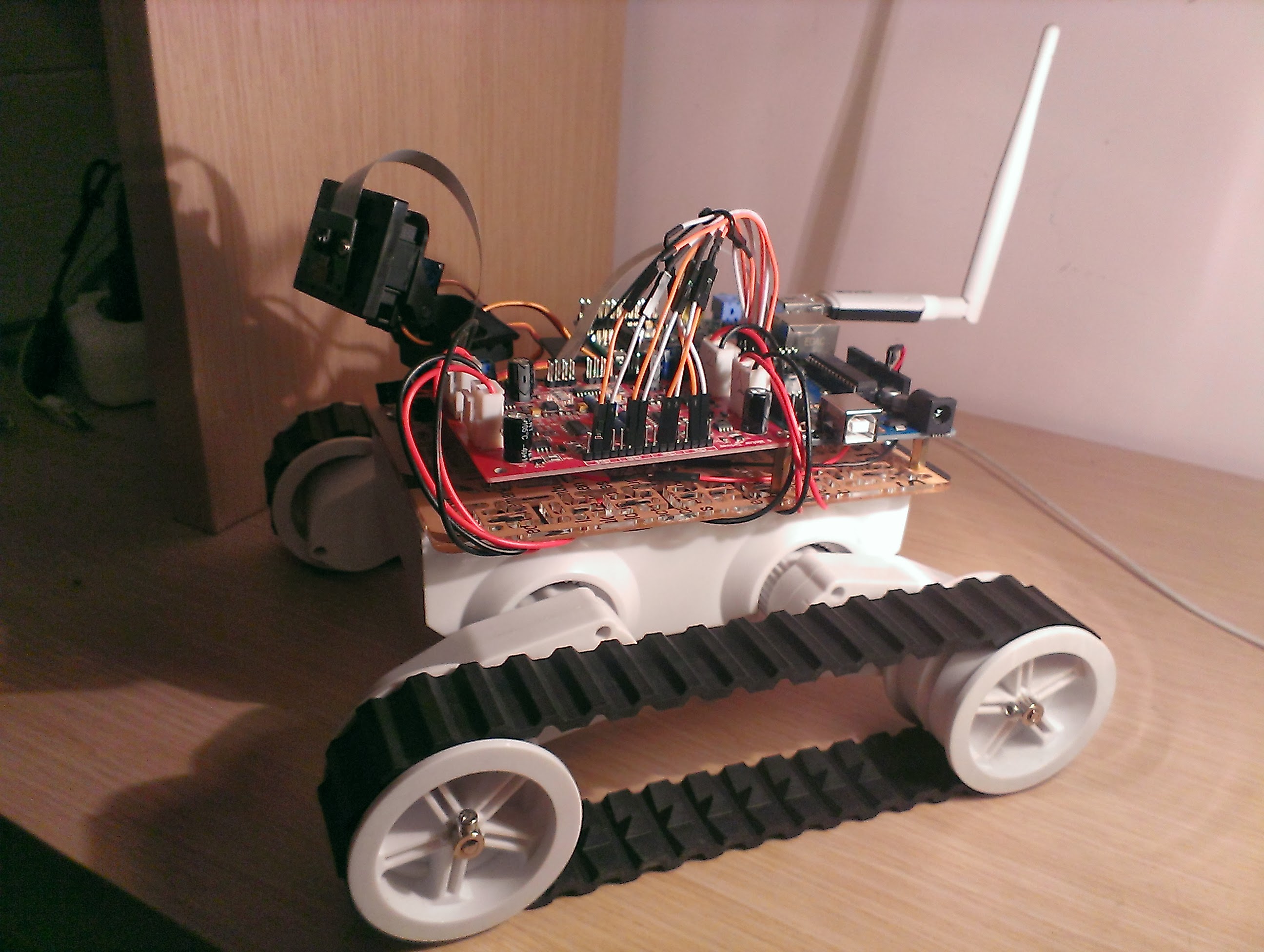
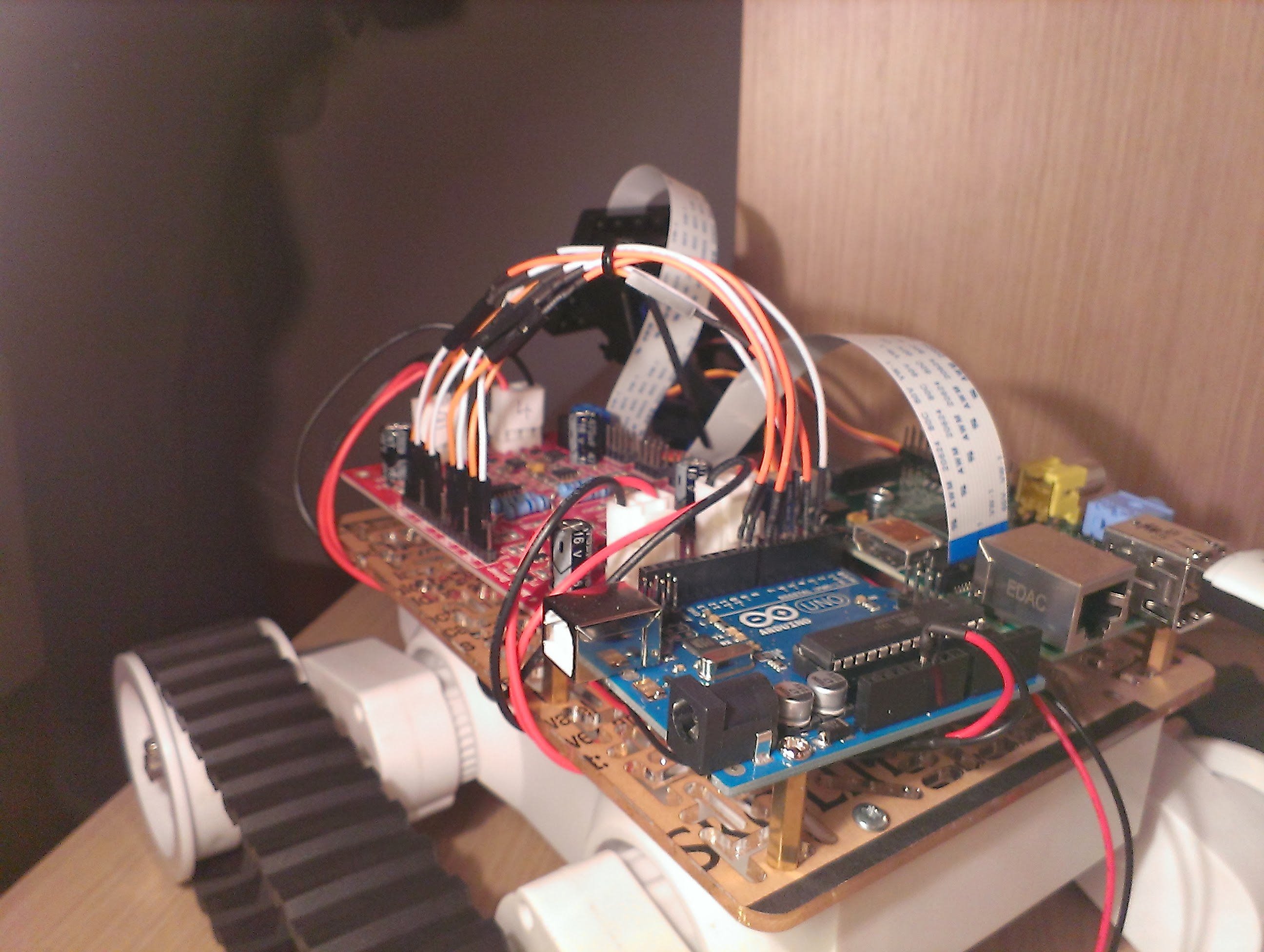
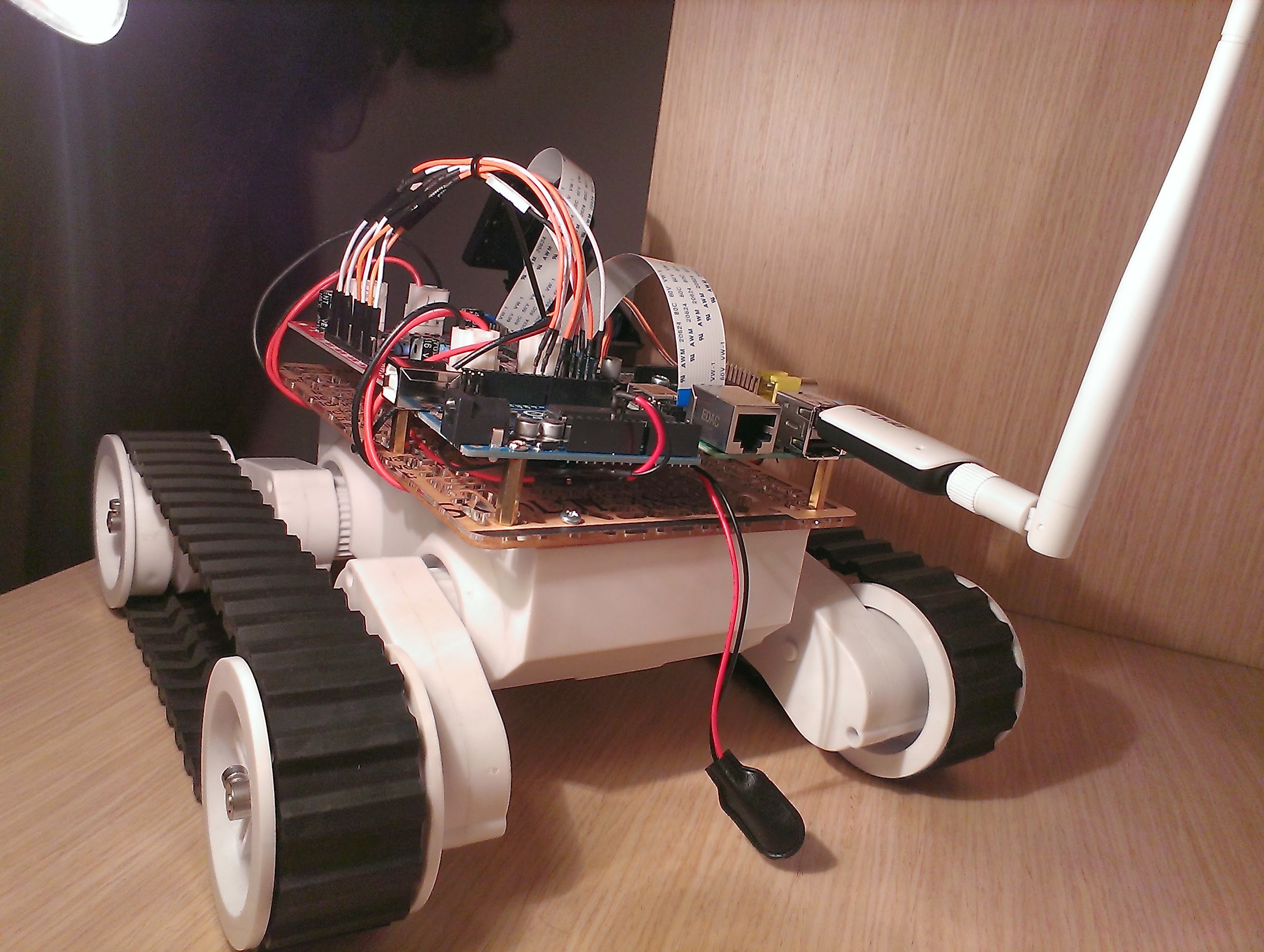
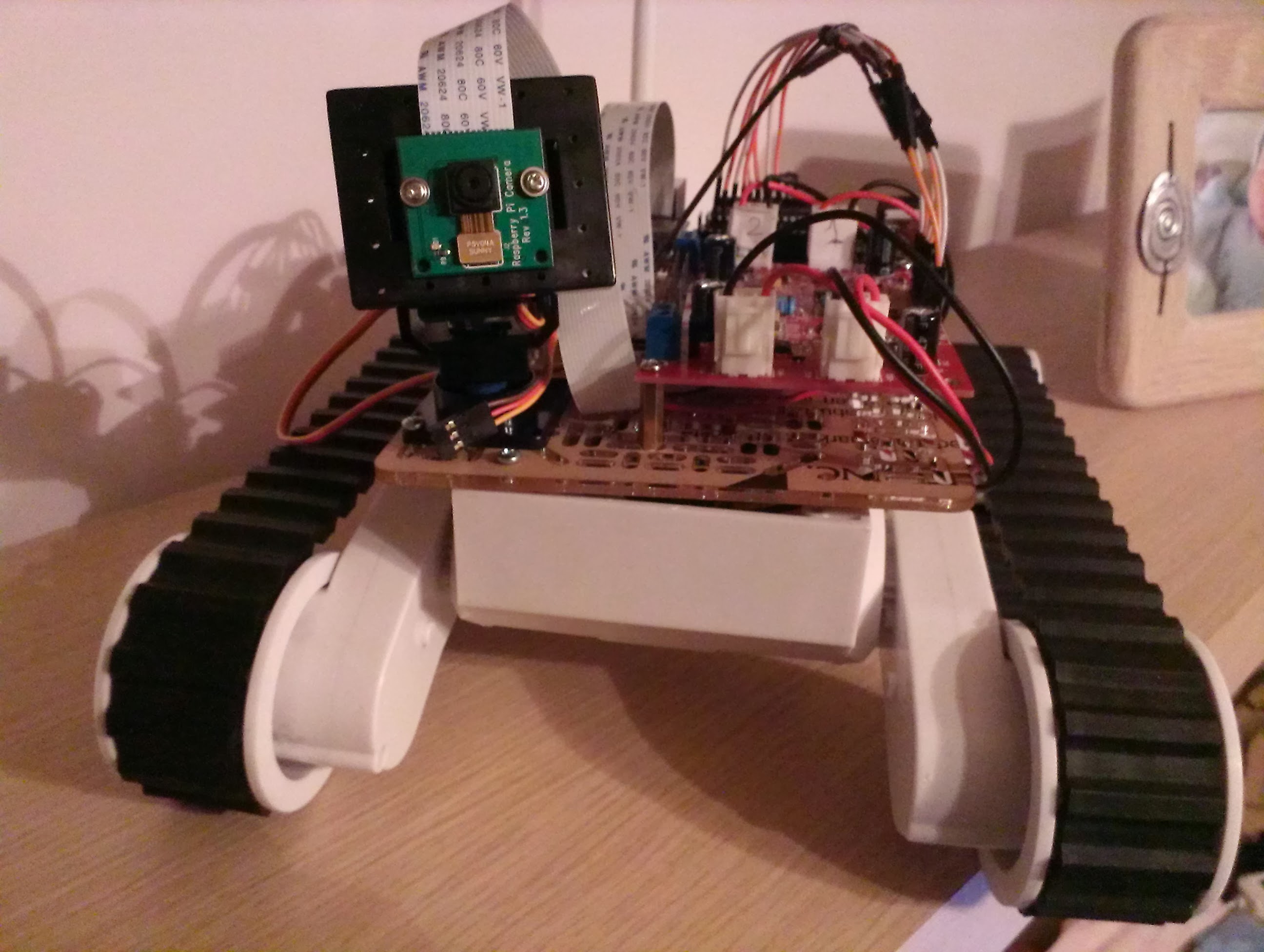
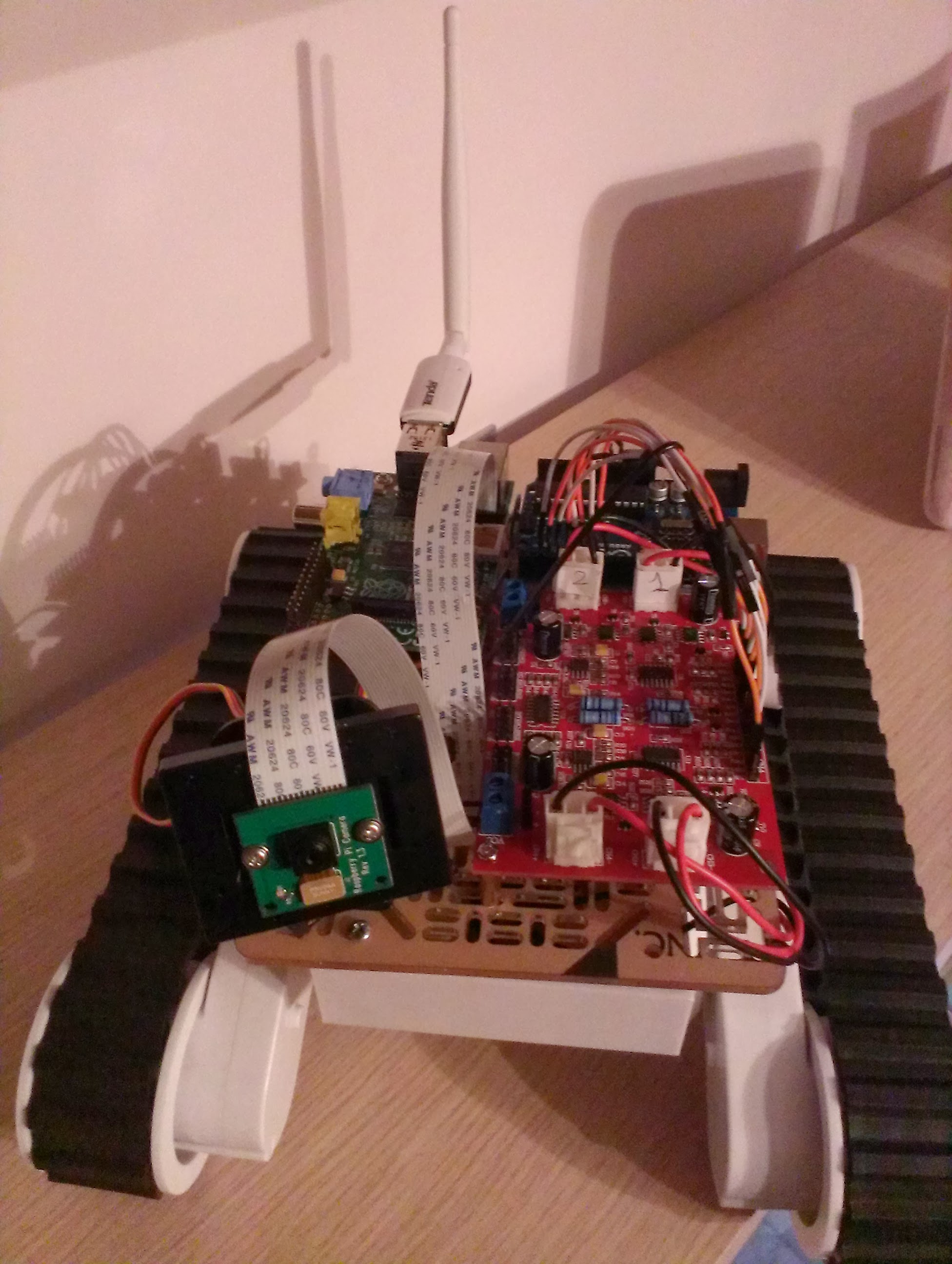
Integration Dagu 5 Rover 4x4 with Arduino and Raspberry PI via Node.js
- Dagu Rover 5 Tracked Chassis with Encoders
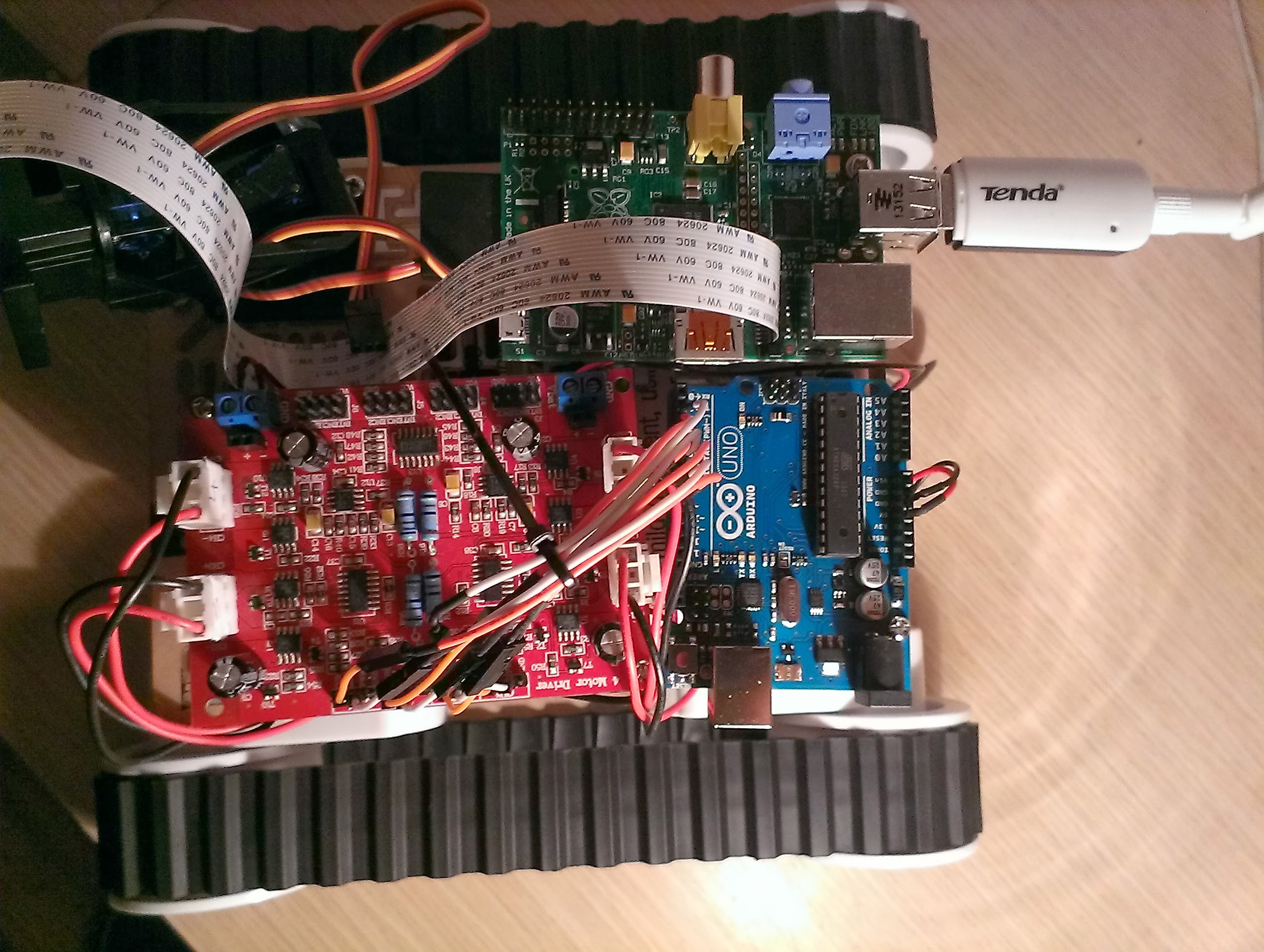
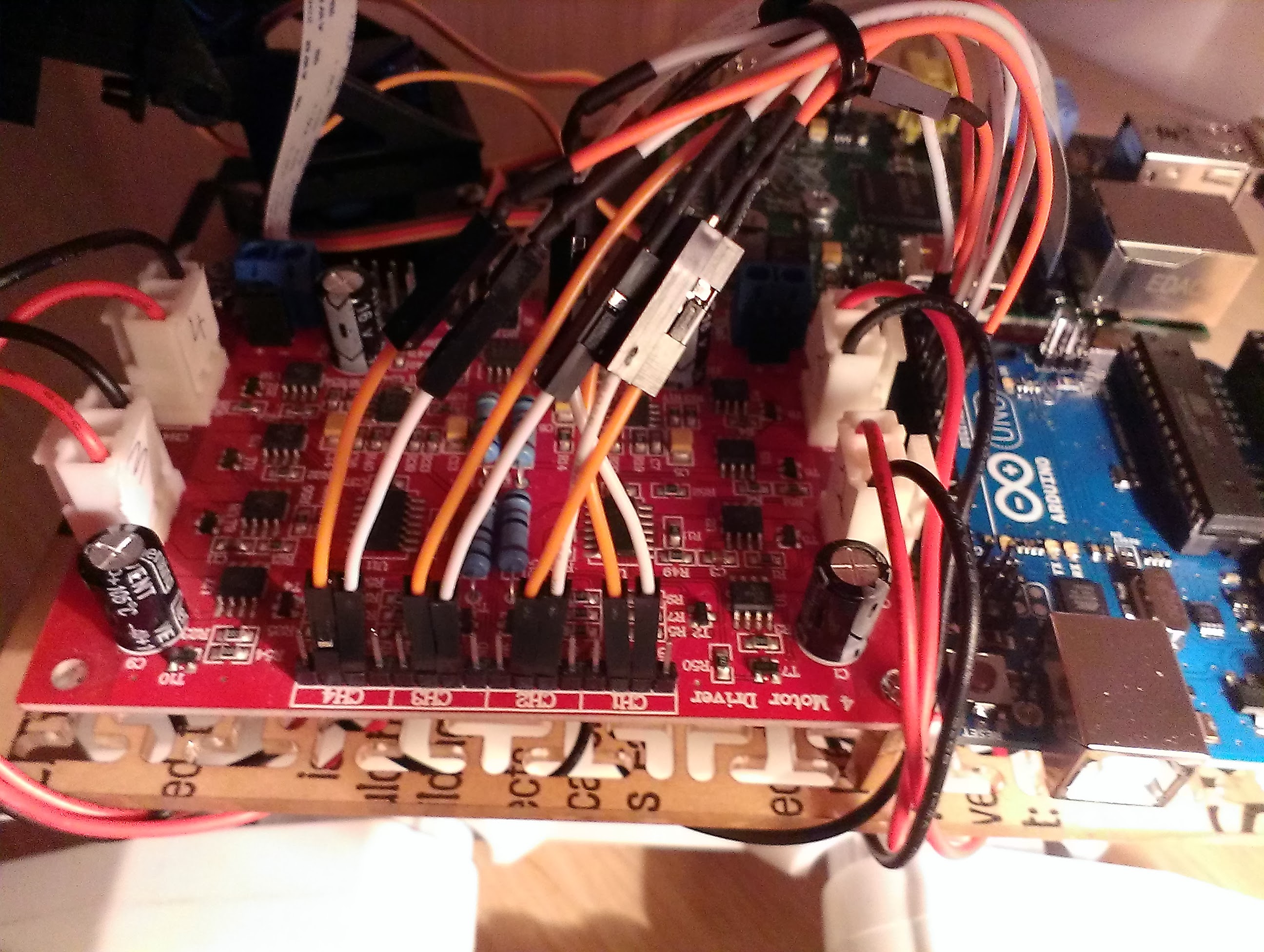
- Dagu - 4 Channel DC Motor Controller with Encoder Support
- Expansion Plate
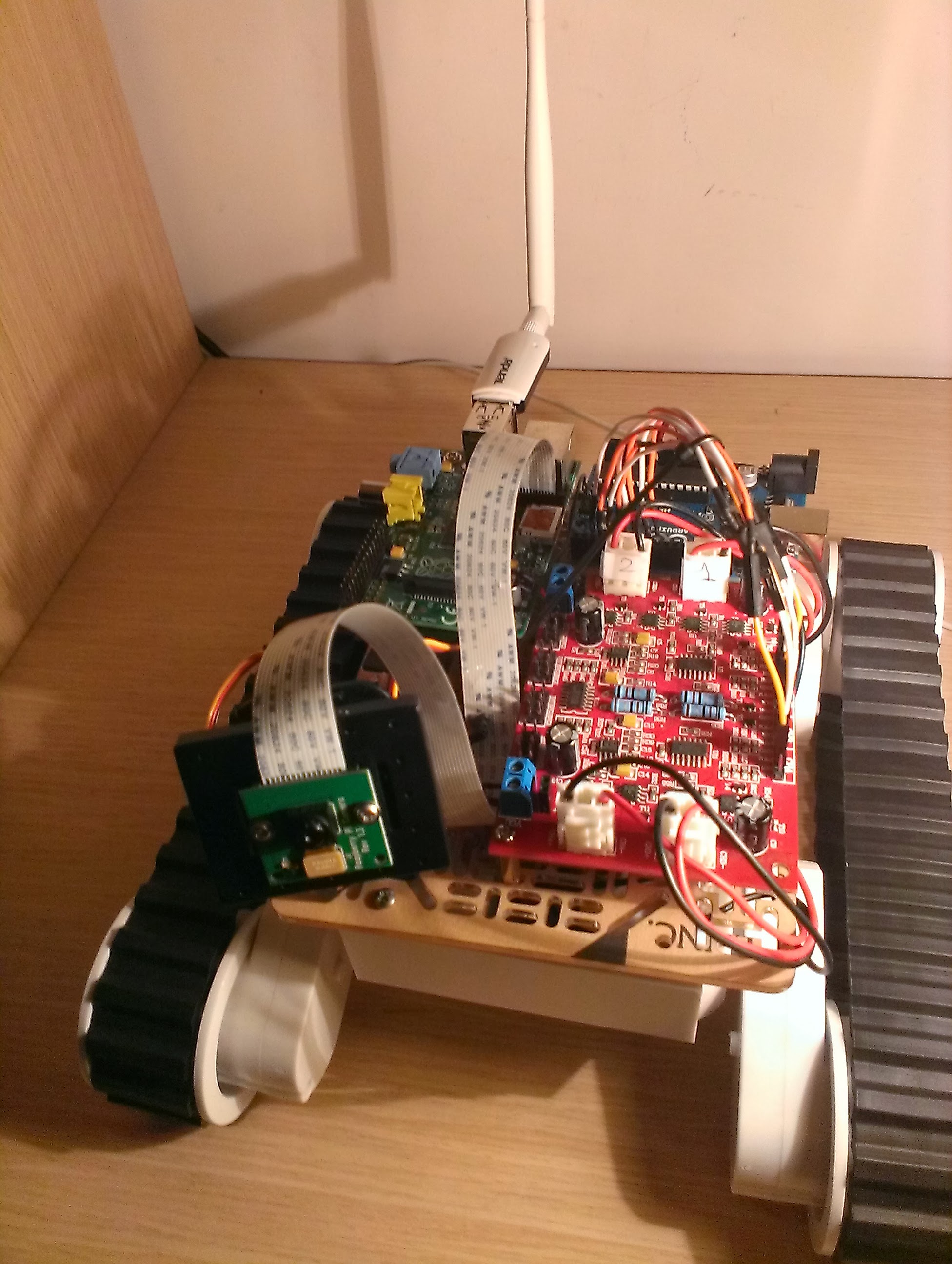
- RaspBerry PI Model B
- WiFi Dongle - Tenda W311U+ High Gain 3.5dB
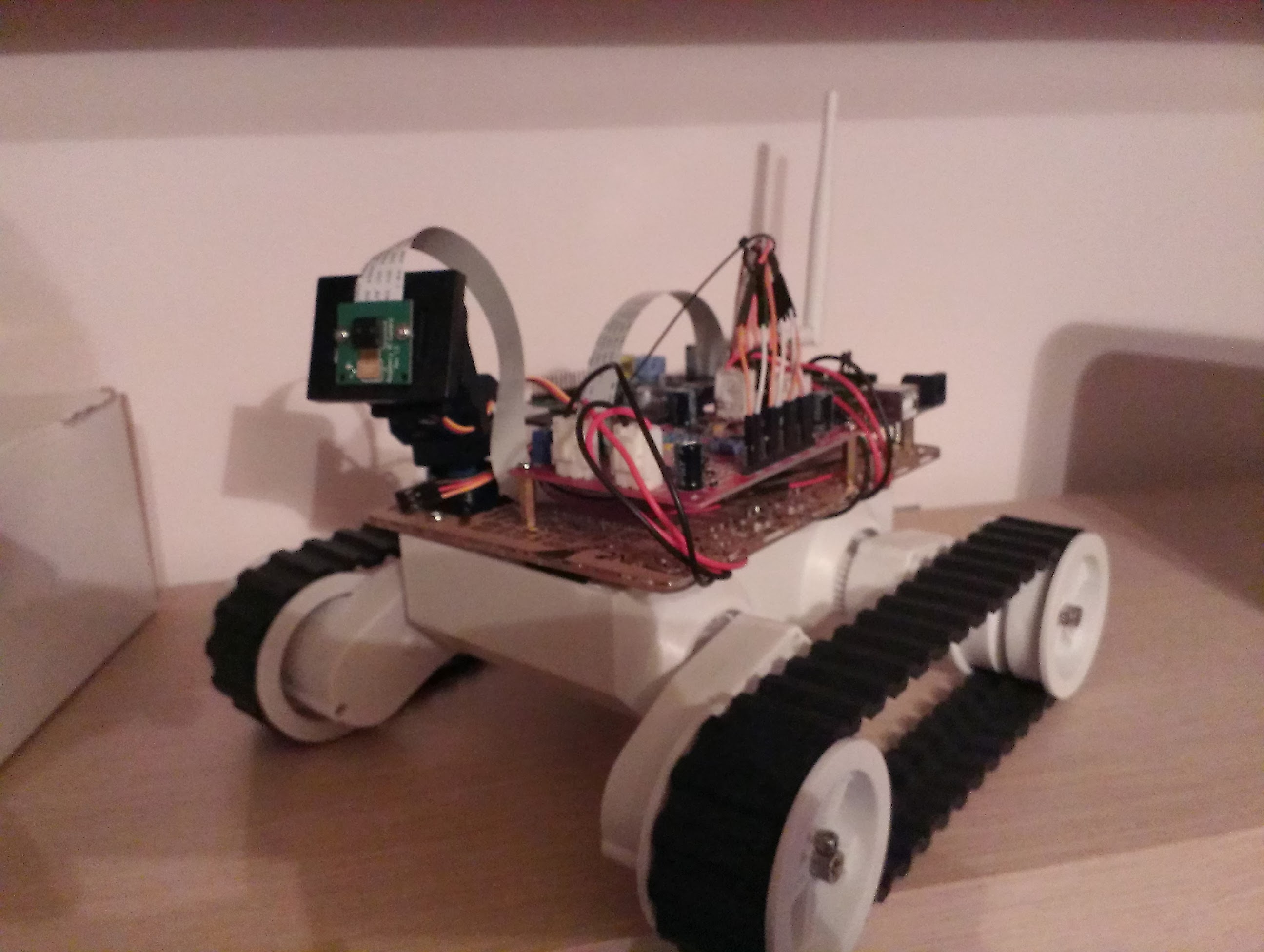
- RaspiCam
- Pan Tilt Cam
- Arduino UNO R3
- 9 Volt Battery for Dagu - 4 Channel DC Motor Controller
- CallPod - Fueltank UNO for Raspberry PI
- Snap Clip 9V Battery
- Jumper Cable
- MPU6050
- HC-SR04
- Node.js
- Express.io
- configuration file on /app/conf/index.js
- WIFI configuration
- Node.js
- Raspi Camera
- RaspiCam Stream
- Plugin Raspi Camera very fast stream!!
- MPU5060
TO DO
Arduino Library ping HC-SR04
Arduino Pin
LEFT_FRONT Motor Pin 3 - CHANNEL 1 PWD PIN - analogwrite modulation Pin 2 - CHANNEL 1 DIR PIN
RIGHT_FRONT Motor Pin 5 - CHANNEL 3 PWD PIN - analogwrite modulation Pin 4 - CHANNEL 3 DIR PIN
LEFT_REAR Motor Pin 6 - CHANNEL 2 PWD PIN - analogwrite modulation Pin 7 - CHANNEL 2 DIR PIN
RIGHT_REAR Motor Pin 9 - CHANNEL 4 PWD PIN - analogwrite modulation Pin 8 - CHANNEL 4 DIR PIN
Cam Tilt pannel Pin 13 - Left-Right Pin 12 - Upper-Down
Expansion Plate
- Cut expansion plate with two holes under the engine controller to pass the 4 motor connectors
TO DO

- the app on nodejs not support socket.io in clutering mode (see server.js in root folder)
- for streaming see this article Plugin Raspi Camera very fast stream!!
- configure gyro
- test on mobile phone
- change raspberry to hotspot wifi.
- add ping sensor