
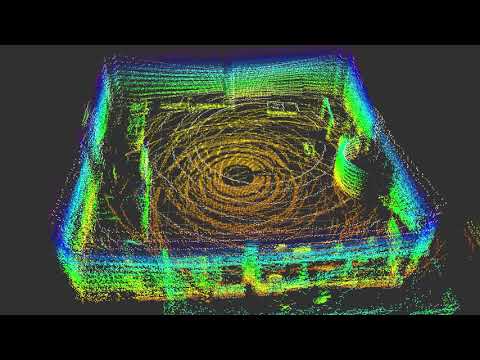
This is a package is a "Adaptive Monte-Carlo Localization in 3D".
It is a particle filter that estimates the localization of a robot moving in a 3D environment without using GPS.
It takes information from an odometry source, point-clouds from an onboard sensor (e.g. laser) and distance measurements from radio-range sensors.
Apache 2.0
Author: Paloma Carrasco Fern�ndez ([email protected]), Francisco Cuesta Rodr�guez ([email protected]), Francisco J.Perez-Grau ([email protected])
Affiliation: FADA-CATEC
Maintainer: Paloma Carrasco Fern�ndez ([email protected]), Francisco Cuesta Rodr�guez ([email protected])
The amcl3d package has been tested under [ROS] Kinetic and Ubuntu 16.04.
If you want more information about the algorithm or use this work in your project, please check and cite the following publication:
-
Francisco J.Perez-Grau, Fernando Caballero, Antidio Viguria and Anibal Ollero:
Multi-sensor 3D Monte Carlo Localization (MCL) for long-term aerial robot navigation, 2017
To know in more detail the behavior of the package:
To build from source, clone the latest version from this repository into your catkin workspace and compile the package using
cd catkin_workspace/src
git clone https://github.com/fada-catec/amcl3d.git
cd ../
catkin build
-
amcl3d.launch: it contains the start of amcl3d node with a standard configuration of parameters.
roslaunch amcl3d amcl3d.launch -
amcl3d_rosin.launch: it contains the initial pose, particle number, 'alpha' parameter, 'take_off_height' parameter and the correctly map to run the algorithm with the correcly data of the rosbag.
roslaunch amcl3d amcl3d_rosin.launch
This branch contains differents tests to evaluate the correct behaviour of the algorithm. To run these tests it is necessary to have the rosbag of the 'Version 1.1.0' release.
To compile:
catkin_make tests
To run:
rosrun amcl3d amcl3d_tests
The code has been commentes to offert the posibility to generate a Doxygen documentation. To generate it:
rosdoc_lite /path/to/workspace/src/amcl3d/amcl3d
To install the rosdoc_lite package:
apt-get install ros-kinetic-rosdoc_lite
Please report bugs and request features using the Issue Tracker.
Supported by ROSIN - ROS-Industrial Focused Technical Projects (FTP).
More information: rosin-project.eu