Home
Justin Huang, Sarah Elliott, Sonya Alexandrova and Maya Cakmak , University of Washington
This app allows teleoperation of the robot. You can drive the robot, move its head and tuck the arms. It also works on mobile phones.
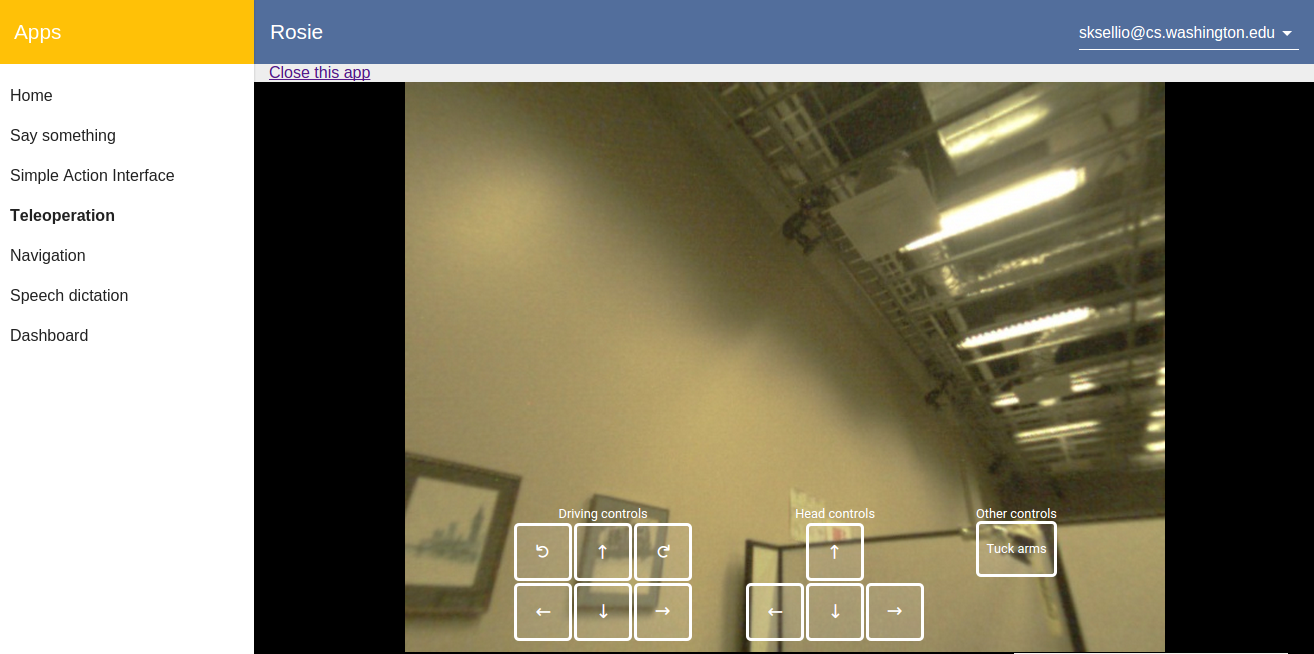
It's recommended that you press the "tuck arms" button before driving the robot. This makes it less likely to hit things as you driving around. Also, be sure that all the cables are unplugged before driving the robot.
Under "driving controls," press the arrow keys to move forward, backward, or side-to-side. Press the keys on the top left and top right to turn the robot. Under "head controls," press the arrow keys to make the head look up, down, left and right.
If the robot is not driving, you may need to enable the breakers first, from the Dashboard.