
In this project, the goal is to write a software pipeline to identify the lane boundaries in a video.
The goals / steps of this project are the following:
- Compute the camera calibration matrix and distortion coefficients given a set of chessboard images.
- Apply a distortion correction to raw images.
- Use color transforms, gradients, etc., to create a thresholded binary image.
- Apply a perspective transform to rectify binary image ("birds-eye view").
- Detect lane pixels and fit to find the lane boundary.
- Determine the curvature of the lane and vehicle position with respect to center.
- Warp the detected lane boundaries back onto the original image.
- Output visual display of the lane boundaries and numerical estimation of lane curvature and vehicle position.
The images for camera calibration are stored in the folder called camera_cal. The images in test_images are for testing your pipeline on single frames. If you want to extract more test images from the videos, you can simply use an image writing method like cv2.imwrite(), i.e., you can read the video in frame by frame as usual, and for frames you want to save for later you can write to an image file.
To help the reviewer examine your work, please save examples of the output from each stage of your pipeline in the folder called output_images, and include a description in your writeup for the project of what each image shows. The video called project_video.mp4 is the video your pipeline should work well on.
The challenge_video.mp4 video is an extra (and optional) challenge for you if you want to test your pipeline under somewhat trickier conditions. The harder_challenge.mp4 video is another optional challenge and is brutal!
If you're feeling ambitious (again, totally optional though), don't stop there! We encourage you to go out and take video of your own, calibrate your camera and show us how you would implement this project from scratch!
Prior to performing lane finding, the camera matrix and distortion coefficients will need to be calculated using chessboard images. The camera calibration code is contained within the cameracalibration.py file.
To begin, "object points", objp are initialized in 3D space with the x, y coordinates of corresponding to the chessboard image with z assumed to be 0. Next, I proceed to find the corners within the chessboard by
- Reading in a chessboard image,
- Converting the image into grayscale
- Using the
cv2.findChessboardCorners()function to find the image point corners within the image. Note: The chessboard size used for calibration is a 9 x 6.
- Check if corners were found. If they are found, I append it to my
imgpointslist and append a correspondingobjpointsfrom theobjp.

The above steps are iterated through all the chessboard images and stored within the same imgpoints and objpoints list.
Next I use the cv2.calibrateCamera function to compute the camera matrix and distortion coefficient. Finally, the camera matrix and distortion is stored into a pickle file distortion_pickle.p. When needed, the camera matrix and distortion coefficient will be retrieved from the distortion_pickle.p file and used in-conjunction with an image and passed through the cv2.undistort() function. Below is a sample result:

As part of the lane finding pipeline, the first step is to correct the distortion in the image. Below is an example of an image that had distortion correction applied:

In my pipeline, I have tried and implemented both color and gradient threshold to isolate the white and yellow lane line markers with varying success. I have implemented the color transform within the colorthreshold.py file and the gradient masking within the sobelthreshold.py file.
Within the colorthreshold.py, I have implement several color transformation functions that can filter out colors for a specific channel and a given threshold range. The following color spaces are supported:
- RGB
- HSV
- HLS
Below is an example of color transformation applied each individual channel:

For my gradient transform, I've applied a combination of the magnitude and gradient direction masking. Below is an example of the gradient threshold being applied:

Once I've applied both transformation, I merged both color and gradient image into a single image whereby a perspective transform will be applied in the next step. Below is an example of the merged image.

The next step in the lane finding process involves converting the image into a top down "bird's eye" view. To do so, I have created a function pipeline.warp() within the pipeline.py file. For my source points, I have manually choosen points from the straight_lines1.jpg image through visual inspection of the lane lines. Below is the before and after result after passing through the source and destination points into the cv2.getPerspectiveTransform(src, dest) function to first get the perspective transform matrix. This is followed up by warping the image through the cv2.warpPerspective() function. Additionally, ran the cv2.getPerspectiveTransform(dest, src) function to obtain the inverse perspective transform matrix which will be used later to project the lane highlighting back onto the road. Below is an example of a warped image with the red line highlighting the area of interest to transform.

To identify the lane pixel, I have implemented two types of sliding windows, with one using the histogram to find the x coordinates of the midpoint of the sliding window and the other using convolution whereby I sum up a window template with a vertical section of the image. Once I have identified the locations within the image whereby the lane is, I find all the x and y coordinates within each window that are lanes by cross referencing the windows against the image which are 1s. These sliding windows have been implemented in the following files histogramsliding.py and convolutionsliding.py respectively.


Next, using the found x and y coordinates, I attempt to find the 2nd order polynomial coefficients by passing the x and y coordinates through the np.polyfit() function.
Once I've found the polynomial coefficients, I get all the x and y coordinates by passing the y values, y min (image top) to y max (image bottom), using the 2nd order polynomial formula f(y) = A y**2 + B y + C. These values will be used to draw the lane lines, find the radius of the curvature of the lane and position of the vehicle.
Calculating the radius of curvature of the lane and the position of the vehicle with respect to center
To calculate the radius of the curvature of the lane, I use the curvature formula:

As I am working with a 2nd order polynomial, I derive the curvature equation to:

By using the 2nd order coefficient values calculated previously, the radius of the curve can evaluated. Additionally, to find the real world radius, I use the following base on the assumption that a lane is 3.7 metres wide and 30 metres long in the image.
| Dimension | metres per pixel |
|---|---|
| y | 30/ 720 |
| x | 3.7 / 700 |
The calculation for the curvature can be found in the pipeline.py file under the pipeline.measure_curvature_real() function.
Next, to find the position of the vehicle I take the polynomial equation for both the left and right line and find the x coordinates at y max. Next I find the midpoint between the two x coordinates using the following formula:
midpoint = (Xright + Xleft) / 2
Next, I evaluate the offset and the real world midpoint by subtracting the lane midpoint from the image midpoint (evaluated by image.shape[1] / 2) and multiplying the resultant by the pixel to real world scale for the x dimension. A positive offset value indicate that the car is right of the lane. Inversely, a negative offset indicates that the car is left of the lane.
Offset = [(image.shape[1] / 2) - midpoint)] * xm_per_pix
The corresponding code can be found in th pipeline.py file under the py.measure_offset() function.
To process images, I have implemented my pipeline through the advance_lane_finding_image_load.py file which will loop through all files in the test_image folder and process them. Below are a few results from the output of the advance_lane_finding_image_load.py.


My video pipeline is process through the advance_lane_finding_video_load.py file via the process_image() function and line.py file to track the left and right lines. In my video pipeline, I have implemented a basic filter which will use the previous frame polynomial coefficients to find the x position a the starting reference to find the lanes to find the new polynomial coefficient. From there I check the coefficient difference between the current and the previous frame and the lane offset to assess the degree of confidence in the polynomial coefficient. If the confidence is high (i.e. the coefficient variation is low and the lane offset value is < 0.5), I add the polynomial coefficient to a list of good polynomial coefficients for the past n frames (set to 8). To project a smooth line on the image, I use the good polynomial coefficients and then compute a mean coefficient which will be used to project a best fit line onto the image. If the confidence in the coefficient is low, I do not add it to the list. If the next n frame have low confidence, my function will revert back to using the sliding window calculation to find the lane pixels.
Here's a link to my video result
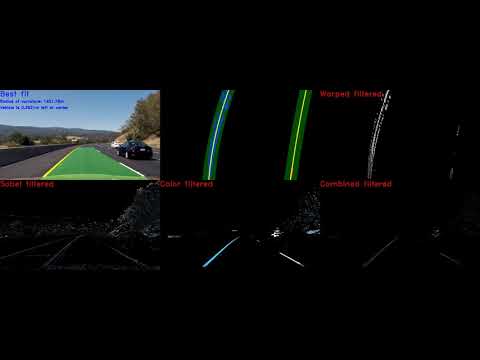
Here's a link to my video result with a diagnostic breakdown of the lane finding
Whilst trying to implement my pipeline, I encountered several hurdles in trying to identify lanes that are either poorly marked (i.e. a lot of black spots) or sharp corners. Ideally, I would have liked to implement a better curve lane finding pipeline which uses Hough line transformation and mean value theorem. To better identify poorly marked or hard to see lane marking, I would have liked to implement some form of shadow/illumination analysis.