Robot de bajo coste seguidor de líneas basado en Arduino. Al disponer de módulo bluetooth, también es posible controlarlo de forma remota con un ordenador o dispositivo móvil.



En la carpeta documentacion encontrarás multitud de información sobre el proyecto, los datasheets de las partes utilizadas, la memoria o una presentación resumiendo los puntos principales.
La programación está realizada en C++ de la forma más modular posible para facilitar la modificación de las funcionalidades. Los archivos se almacenan en la carpeta codigo.
El sketch principal es el llamado robot y se apoya en el uso de las librerías dispuestas en la carpeta librerias, que facilitan en gran medida la programación y el acceso a todas las capacidades de las que se ha dotado el robot.
La carpeta test incluye sketches para la comprobación individual de cada uno de los módulos utilizado y comprobar el correcto funcioamiento de la electrónica y montaje.
En la carpeta esquematicos se encuentran los diagramas electrónicos y las PCBs, diseñadas en DipTrace.
El robot está formado por las siguientes placas:
- Principal: distribución de los pines del Arduino a las placas modulares
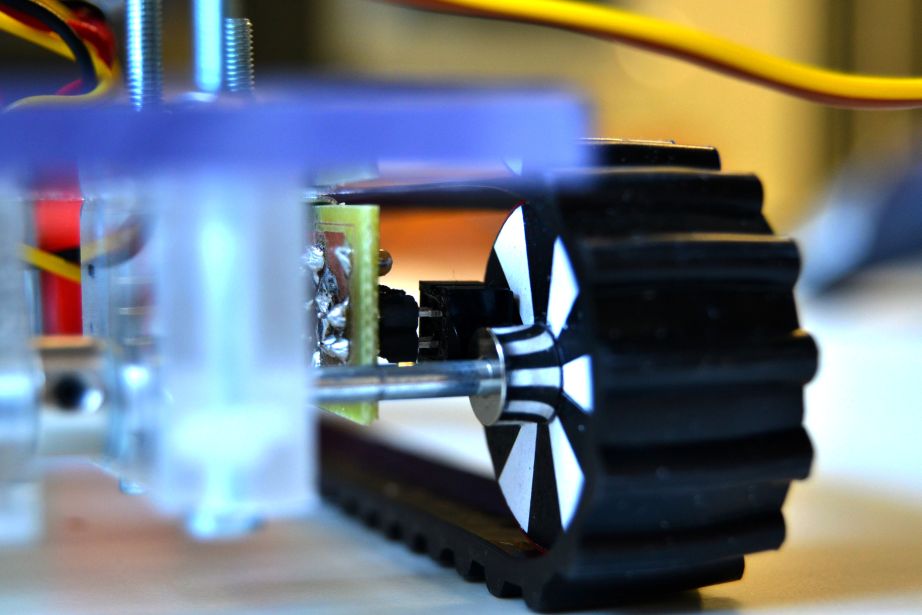
- Encoder de rueda: se instala pegado a las ruedas para con un detector de reflexión infrarroja detectar el movimiento de la rueda
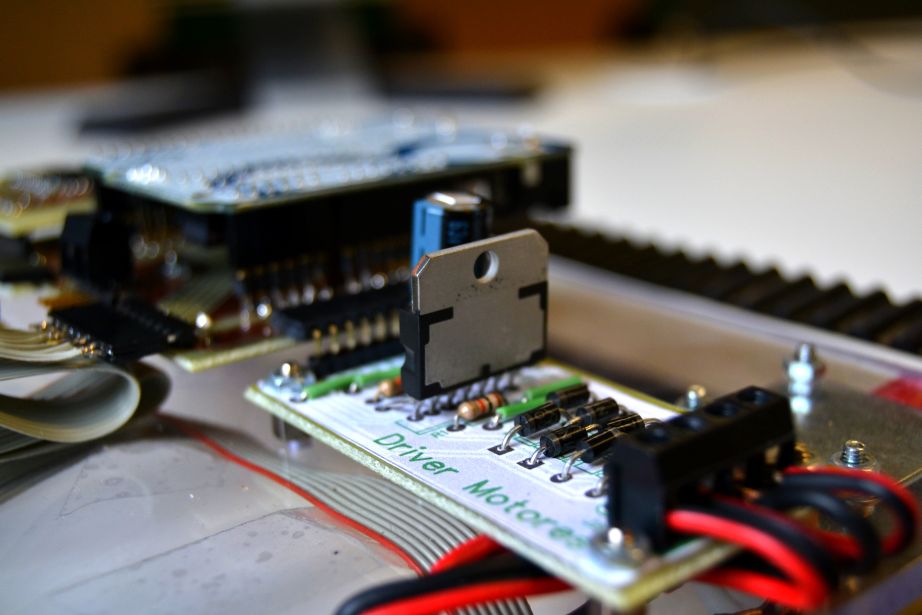
- Driver de motores: aloja toda la electrónica de potencia para el movimiento de los motores
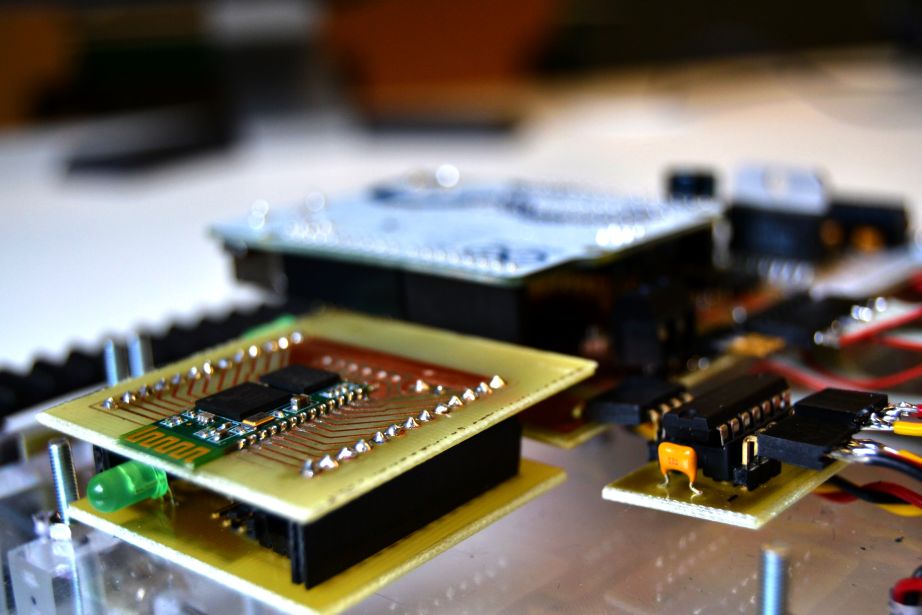
- Comunicaciones: sirve de base para el módulo bluetooth utilizado con la electrónica de adaptación de señales
- Detección de línea: integra los seis sensores de detección de línea que permite detectar su posición