- Thiemo Wiedemeyer <[email protected]>, Institute for Artificial Intelligence, University of Bremen
- Added a calibration for the depth measurements to the calibration tool.
- Support for multiple sensors by different base names for all topics.
- Integrated static transform publisher that uses calibration results.
This is a collection of tools and libraries for a ROS Interface to the Kinect One (Kinect v2).
It contains:
- a calibration tool for calibrating the IR sensor of the Kinect One to the RGB sensor and the depth measurements
- a library for depth registration with OpenCL support
- the bridge between libfreenect2 and ROS
- a viewer for the images / point clouds
- ROS Hydro/Indigo
- OpenCV
- PCL
- Eigen (optional)
- OpenCL (optional)
- libfreenect2
-
Replace line 48 to 50 with
GET_FILENAME_COMPONENT(LIBUSB_DIR "${MY_DIR}/../../depends/libusb/" REALPATH)
INCLUDE_DIRECTORIES("${LIBUSB_DIR}/include/libusb-1.0/") LINK_DIRECTORIES("${LIBUSB_DIR}/lib/") SET(CMAKE_INSTALL_RPATH_USE_LINK_PATH TRUE)
## Install
1. Install the ROS. [Instructions for Ubuntu 14.04](http://wiki.ros.org/indigo/Installation/Ubuntu)
2. [Setup your ROS environment](http://wiki.ros.org/ROS/Tutorials/InstallingandConfiguringROSEnvironment)
3. Install [libfreenect2](https://github.com/OpenKinect/libfreenect2) with the described modifications:
cd ~ sudo apt-get install -y build-essential libturbojpeg libtool autoconf libudev-dev cmake mesa-common-dev freeglut3-dev libxrandr-dev doxygen libxi-dev libopencv-dev sudo ln -s /usr/lib/x86_64-linux-gnu/libturbojpeg.so.0 /usr/lib/x86_64-linux-gnu/libturbojpeg.so git clone https://github.com/OpenKinect/libfreenect2
Apply the modifications and then
cd libfreenect2/depends ./install_ubuntu.sh cd ../build mkdir linux cd linux cmake ../../examples/protonect/ -DENABLE_CXX11=ON make && sudo make install
4. Clone this repository into your catkin workspace, install the dependencies and build it:
cd ~/catkin_ws/src/ git clone https://github.com/code-iai/iai_kinect2.git cd iai_kinect2 rosdep install -r --from-paths . cd ~/catkin_ws catkin_make -DCMAKE_BUILD_TYPE="Release"
5. Connect your sensor and run `kinect2_bridge`:
rosrun kinect2_bridge kinect2_bridge
6. Calibrate your sensor using the `kinect2_calibration`. [Further details](kinect2_calibration#calibrating-the-kinect-one)
7. Add the calibration files to the `kinect2_bridge/data/<serialnumber>` folder. [Further details](kinect2_bridge#first-steps)
8. Restart `kinect2_bridge` and view the results using `rosrun registration_viewer viewer -kinect2 -cloud`.
## Permissions to access the Kinect One
To gain access to the Kinect One for non root users you have to add a rule to the udev rules.
1. Create a file named `90-kinect2.rules` in `/etc/udev/rules.d/`.
2. Write the following lines into that file:
SUBSYSTEM=="usb", ATTR{idVendor}=="045e", ATTR{idProduct}=="02c4", MODE="0666" SUBSYSTEM=="usb", ATTR{idVendor}=="045e", ATTR{idProduct}=="02d8", MODE="0666" SUBSYSTEM=="usb", ATTR{idVendor}=="045e", ATTR{idProduct}=="02d9", MODE="0666"
3. Check if the `idProduct` of your sensor is in the list. If not just add another line with the `idProduct` of your sensor. You can obtain it by running `dmesg | grep "045e"`.
4. Reconnect the sensor and you should be able to access it.
## OpenCL with Intel GPU on Linux
#### Known configuration
- Ubuntu 14.04
- Kernel 3.13 (>= 3.13.0-35-generic) or Kernel 3.16 (needed for the Intel USB 3.0 Controller)
- Beignet v1.0 (http://www.freedesktop.org/wiki/Software/Beignet/)
#### Dependencies for Beignet
For Beignet the following depencies have to be installed manually:
* ocl-icd-dev
* ocl-icd-libopencl1
* libdrm / libdrm-dev
* llvm-3.5 / llvm-3.5-dev
* clang-3.5 / clang-3.5-dev
* libegl1-mesa-dev
* libedit-dev
#### Building Beignet
Download and compile the Beignet v1.0 release from source (there is a Beignet_v0.3 binary for Trusty, but it is very old, buggy and slow)
##### Additional steps (if needed):
* Error "clang: not found":
sudo ln -s /usr/lib/llvm-3.5/bin/clang /usr/bin/clang
* Known Beignet issue with Kernel 3.15/3.16 (see Beignet readme); fix is to disable cmd_parser:
sudo su echo 0 > /sys/module/i915/parameters/enable_cmd_parser
* To get 100% pass rate on the Beignet unit tests you may have to:
* Execute directly on hw: ssh-session might not work
* Execute as root
*Note: Both previous points have to to with the fact that no x-server was installed. Apparently this will be fixed in a future release of Beignet.*
#### Results on Intel i7-3840QM (mobile hardware)
* **~100 fps** on the OpenCLDepthPacketProcessor (compared to < *5 fps* on same hardware using CPU-based depth registration!)
... [OpenCLDepthPacketProcessor] avg. time: 10.1716ms -> ~98.3129Hz [TurboJpegRgbPacketProcessor] avg. time: 16.0787ms -> ~62.194Hz ...
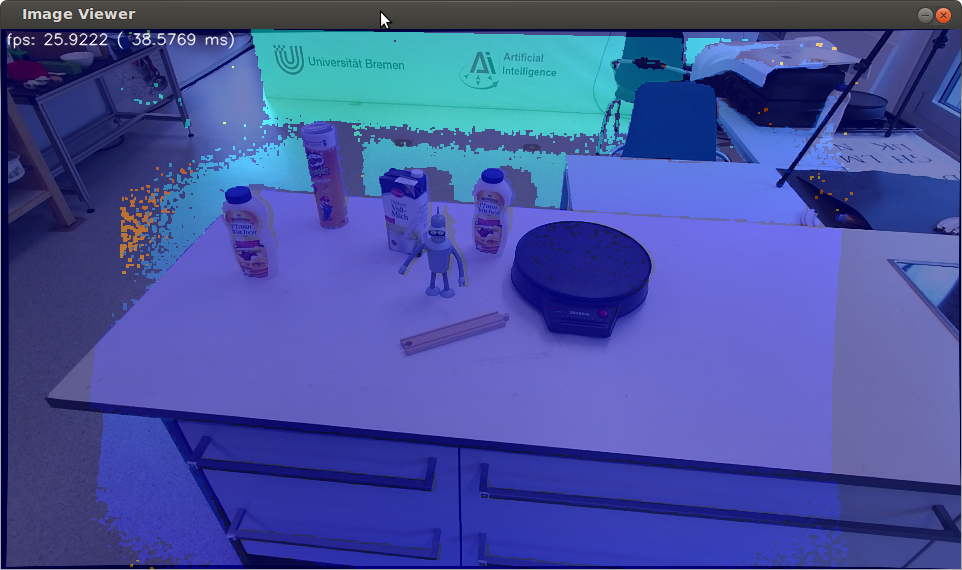
## Screenshots
Here are some screenshots from our toolkit: