While the Jupyter ecosystem has been widely adopted by the Data Science and Machine Learning community, the robotics community has not jumped on the band wagon yet! Most tools around ROS, the Robot Operating System, are built using Python and QT.
However, using QT separates the user away from the code. We've built a set of ROS tools for jupyter notebook, trying to promote a rich, interactive experience for Robotics developers utilizing the power of the jupyter notebook.
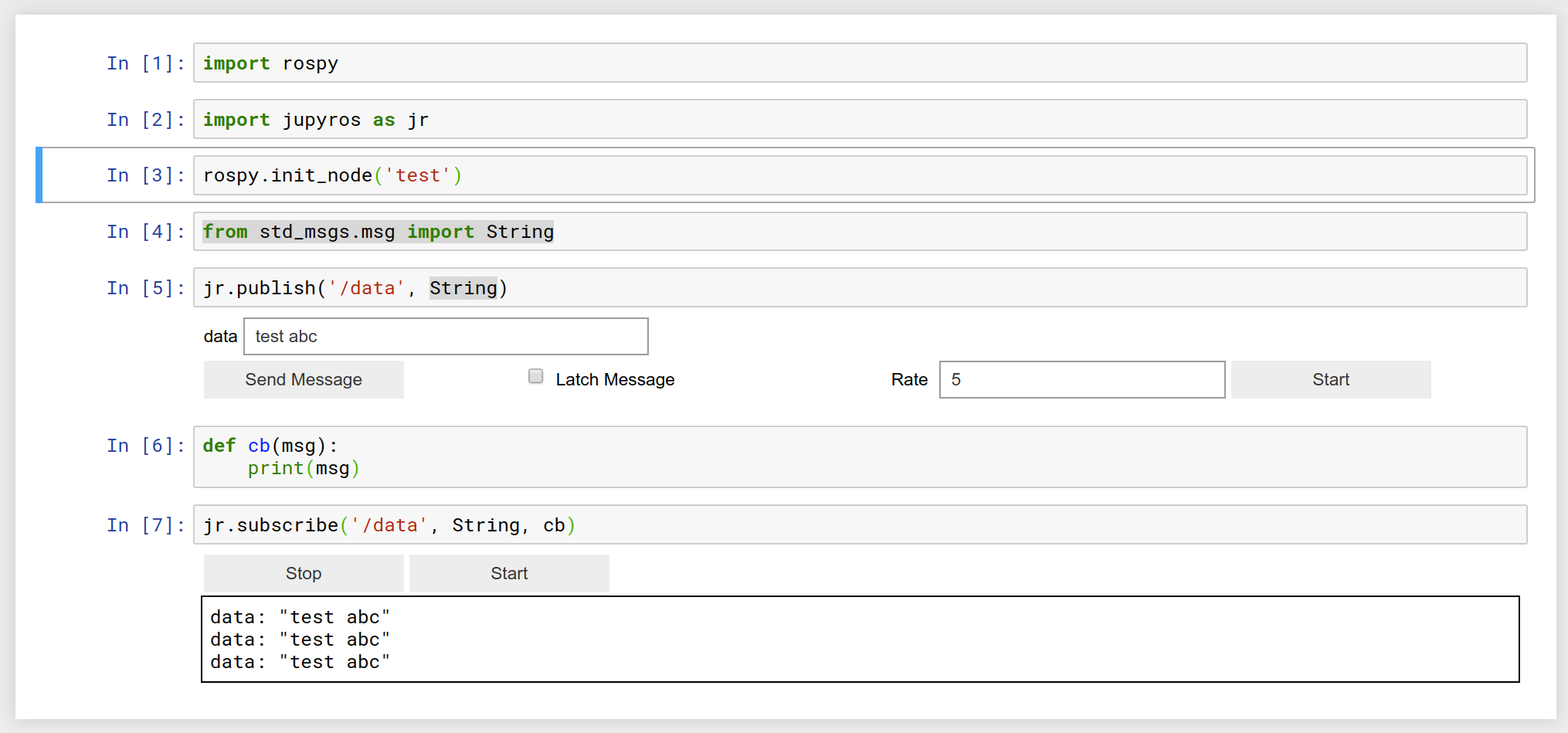
With jupyter-ros, it's possible to easily create widgets for custom message types to send messages.
If you find this package useful, don't hesitate to contribute! You can also always reach out to [email protected] or on twitter: https://twitter.com/wuoulf, or join us on Gitter
You need a ROS environment with rospy. We recommend using Robostack (follow their installation instructions) which allows you to install ROS in a conda environment.
Also required are numpy and bqplot for the live-plotting,
ipywidgets for the interactive widgets, and ipycanvas for the Turtlesim animations.
conda install jupyter bqplot pyyaml ipywidgets ipycanvas
pyyaml is necessary for rospy.
To install use conda or mamba:
conda install jupyter-ros -c robostack
You can create a dev environment with:
conda create -n jupyros -c conda-forge python nodejs=14 jupyterlab=3 jupyter bqplot pyyaml ipywidgets ipycanvasFor a development installation (requires npm),
git clone https://github.com/RoboStack/jupyter-ros.git
cd jupyter-ros
pip install -e .
jupyter nbextension install --py --symlink --sys-prefix jupyros
jupyter nbextension enable --py --sys-prefix jupyros
To update the defaults.js javascript you need to run python jupyros/ros3d.py.
You might see a warning like "The rospy package is not found in your $PYTHONPATH. Subscribe and publish are not going to work. Do you need to activate your ROS environment?"
This is harmless during installation, but if you see this warning in a notebook, you should check that your ROS environment is activated. You can also set the path from inside the notebook using
import sys
sys.path.append('/opt/ros/melodic/lib/python2.7/dist-packages/')
# The next line should now work!
import jupyros
If you got the following error when you run a cell failed to display Jupyter Widget of type VBox,
you can solve it by running the following command jupyter nbextension enable --py --sys-prefix widgetsnbextension
We use a shared copyright model that enables all contributors to maintain the copyright on their contributions.
This software is licensed under the BSD-3-Clause license. See the LICENSE file for details.