Cannot see any car image in the Dreamview or see any trajectory. #14
Comments
|
I found out the problem. When I run the HMI, and rosnode list, there is none. thats why there's no image at all..but I dont know how to solve it yet. |
|
@tomzhang666 there are two bag files inside the docker. Did you try to run it ? I'm on the same boat with you. Still trying to figure what the problem is. Did you successfully run Mine got an error not finding the Any idea ? |
|
thats not my problem. |
|
@tomzhang666 got it working, permission issue again, just run the |
|
@tomzhang666 Did you source /opt/ros/indigo/setup.bash in your bashrc? |
|
Yes. And I can even run roscore in the docker, but nothing shows up when i
run rosnode list...
On Wed, Jul 5, 2017 at 2:09 AM Capri2014 ***@***.***> wrote:
@tomzhang666 <https://github.com/tomzhang666> Did you source
/opt/ros/indigo/setup.bash in your bashrc?
—
You are receiving this because you were mentioned.
Reply to this email directly, view it on GitHub
<#14 (comment)>,
or mute the thread
<https://github.com/notifications/unsubscribe-auth/AVEmfTOCEzNgfxzOYsyLSua-vSSU3crGks5sK1K3gaJpZM4ON_8X>
.
--
*Zhengyu Zhang*
Master of Engineering Candidate (Experiential Advanced Control)
Department of Mechanical Engineering
Tel:(970)-889-7323
Email:[email protected]
LinkedIn: https://www.linkedin.com/in/zhengyu-zhang-163666102
-
|
|
@tomzhang666 Sorry I mean you should not source your host computer /opt/ros/indigo/setup.bash, use the one under third_party in docker. |
|
Got it working @tomzhang666 try to run the |

|
@Capri2014 Can you specify the steps a bit more? I still didn't get it work. Its super weird, when I run hmi.sh, the command window told me that it start roscore, but when I try to check the rosnode list, there's nothing in it. Thats why I cannot see anything in my browser. I think I have got this error because the docker setting? I am very new to docker, so any help would be very appreciated. |
|
@tomzhang666 After installing docker, do you logout and login again? Try Thanks. |
|
@ycool No such file exist |
|
@ycool |

|
chrome browser is needed |
|
Try chrome browser too. It doesn't work
On Wed, Jul 5, 2017 at 3:48 PM smilejx ***@***.***> wrote:
chrome browser is needed
—
You are receiving this because you were mentioned.
Reply to this email directly, view it on GitHub
<#14 (comment)>,
or mute the thread
<https://github.com/notifications/unsubscribe-auth/AVEmfbKrPjsGTXrqmpFws3FRpjicPJa2ks5sLBKtgaJpZM4ON_8X>
.
--
*Zhengyu Zhang*
Master of Engineering Candidate (Experiential Advanced Control)
Department of Mechanical Engineering
Tel:(970)-889-7323
Email:[email protected]
LinkedIn: https://www.linkedin.com/in/zhengyu-zhang-163666102
-
|
|
@tomzhang666 from your screen picture, you are using dev docker image. It need build from source code bash /apollo/apollo.sh build # inside docker The easier way to run demo is to follow the instruction at https://github.com/ApolloAuto/apollo/blob/master/docs/demo_guide/README.md |
|
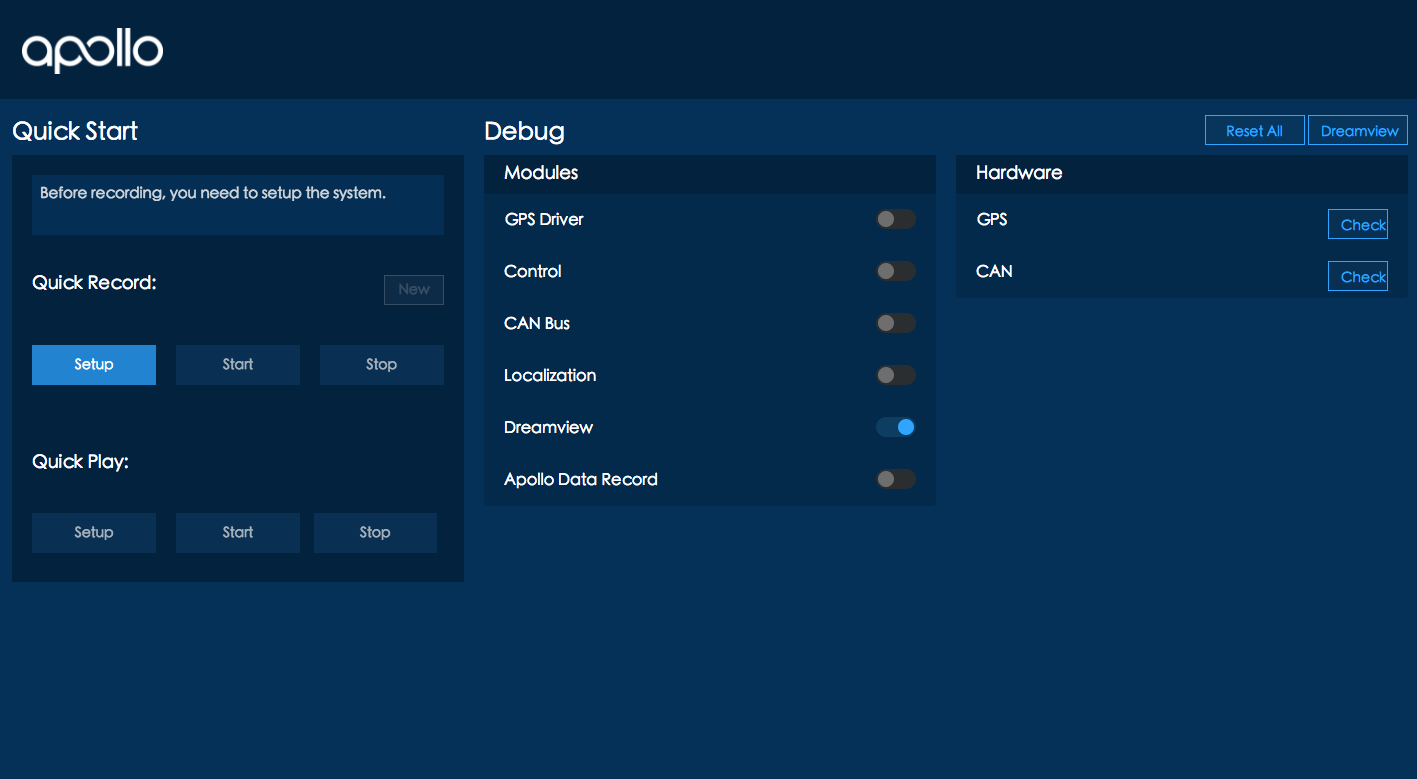
I have met the same problems whatever in dev environment(bash docker/scripts/dev_start.sh) or release environment(bash docker/scripts/release_start.sh). After run the following command in apollo_release container: I can open the "HMI Setup" page and Dreamview page,but no vehicle or trajectory shows. the screen snapshot are below:
|
|
@bigwhite in release docker, can you post the output of |
|
@tomzhang666 Probably you can just open a terminal and run that rosbag cmd. For me that worked. However if I ran that cmd in docker, I would have some problems like no rosbag cmd can be found or (after I fixed it) some python dependencies were missing. |
|
|
On another terminal, instead of running Thanks. |
|
|
Can you run the following commands and post the output? Thanks a lot. |
|
|
Your rostopic list looks good. Your DreamView still shows nothing? Can you post env.txt? Thanks. |
|
there is still no car and trajectory in my Dreamview window. but the env of the releases inside docker is below: |
|
Noticed several things are not right.
Do you have any local modification for the scripts? Does Can you pull the latest code and rerun the following command out of docker? Thanks. |
|
@ycool the only user I use on my host is "root". "root" is my normal user id. I haven't change any source code locally. All code are from apollo-v1.0.0 release. |
|
Ok. Let's try everything again from scratch. Can you update us if any progress? Thanks a lot. |
|
You can try to set environment ROS_IP before start all these nodes. export ROS_IP=127.0.0.1Thanks. |
|
@ycool I forgot to say that my environment is Aliyun ECS ubuntu 16.04.1 LTS. Is this OK for apollo installation and later experiments? |
|
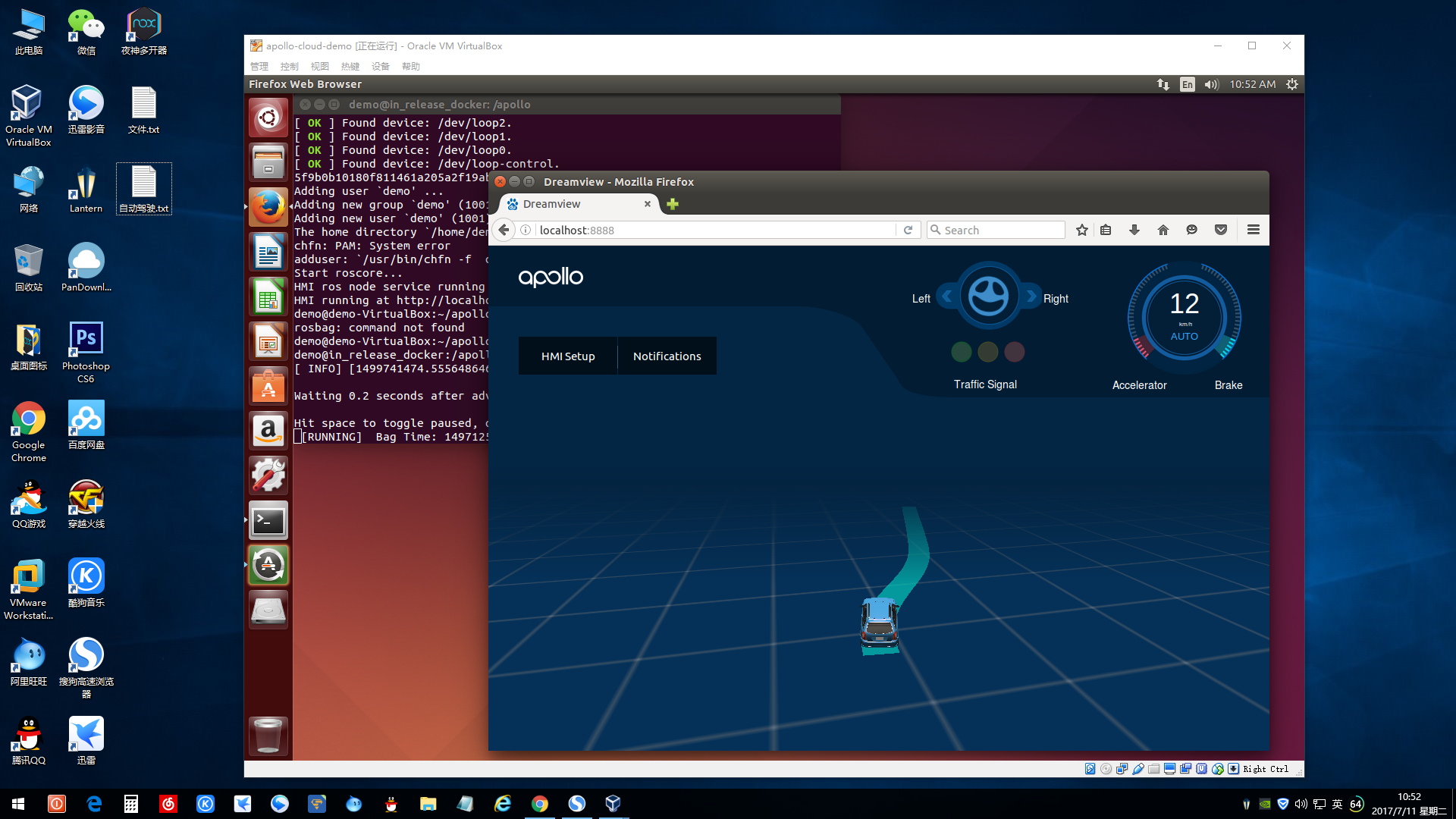
I tried again from scratch according to @ycool 's steps, but I still could not see the vehicle and trajectory in my Dreamview window. the start process seems hangs after I enter 'y', but the container has started. I don't know whether it is a problem. |
Rosbag play failed in the background. It seems everything else is OK. Can you play bag again and check if dreamview works? Thanks |
|
I tried again, but dreamview was still not normal . |
|
In your another terminal: (inside release docker which did Both your rostopic list and rostopic echo contents are correct. It is very close now :) |
|
I restart the dreamview module,but it still not works. I'm wondering whether the problem is related to the chrome browser's version. My chrome is 59.0.3071.115(64bit) on Mac OS. If I use another chrome browser(version:52.0.2743.116 m) running on windows in my virtualbox vm, I got worse result - Only background color can be displayed and nothing else can be seen. |
|
@bigwhite I think Chrome version is ok. (Mine is Version 58.0.3029.110 (64-bit)) Is it possible to temporarily login your Aliyun ECS ubuntu 16.04.1 LTS instance? If so, can you send the info to [email protected]? (If you want to join the realtime debug, send your wechat ID and some possible time slots) Thank a lot for your patience. |
|
@ycool I have sent you an email, pls check. |
|
|
|
With the help of @ycool, my problem has been solved. The reason is that the websocket server port:8889 which dreamview use has been blocked by aliyun ECS firewall. After reconfiging the firewall, the vehicle and trajectory finally appear. |
[AMD][build] Introduce use_nvidia_gpu and use_amd_gpu config settings (on behalf of emankov)
Hi All,
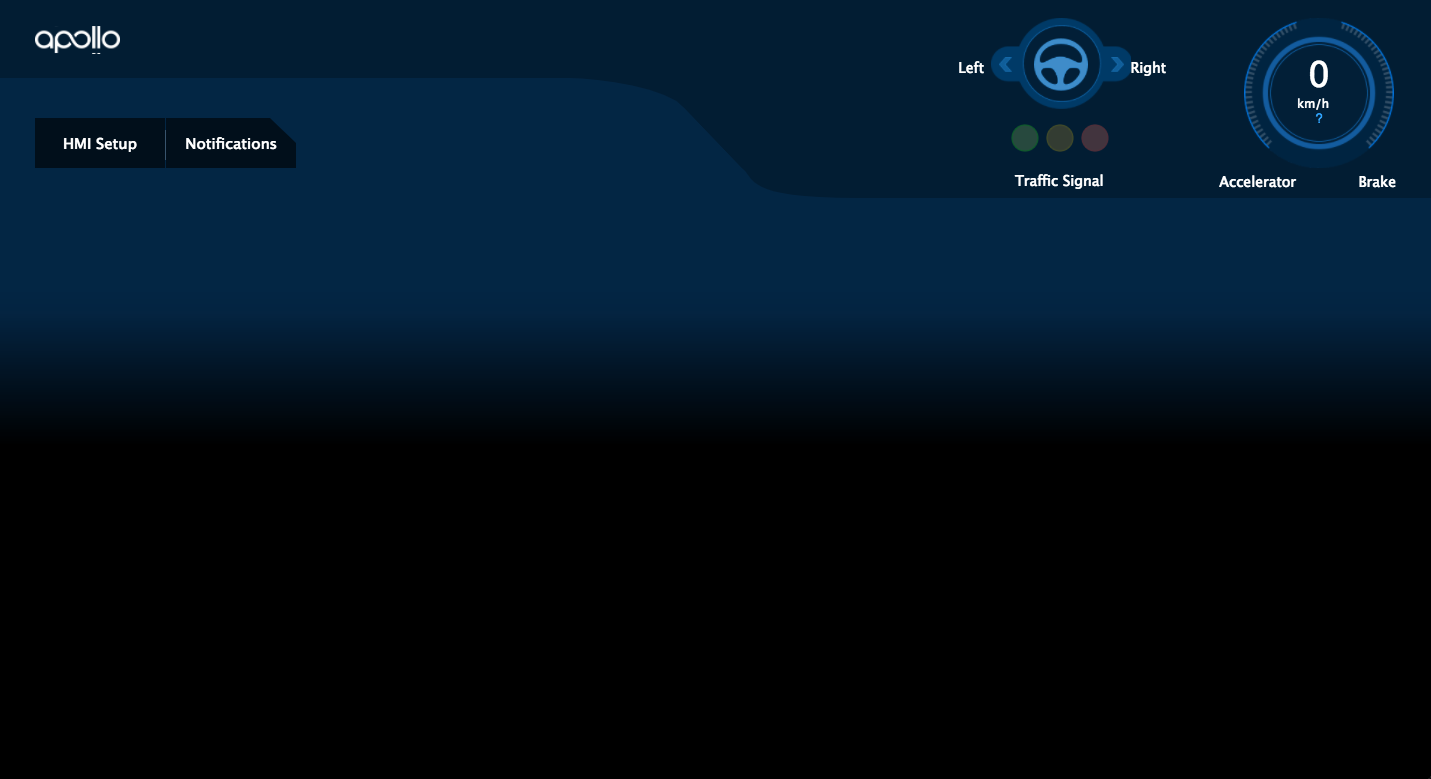
I successfully finish all the instructions for the demo, but when I switch into Dreamview window, there is neither car image nor trajectory such as in the readme when I rosbag play -l.
I can see the bag file playing, but there's nothing showing on the localhost:8888. Has anyone encounter same problem as me ?
Thanks!
The text was updated successfully, but these errors were encountered: