Common robot control interface to be implemented by device specific plug-ins
From the point of view of a generic robotic control application, any robot could be seen as a black-box with inputs (setpoints) and outputs (measurements), regardless of its mechanism dynamics and control algorithm. Robot Control Interface tries to implement this abstraction layer, allowing for easy switching of devices and their pluggable software library implementation.
Sometimes, when controlling a robot, the positions/velocities/interaction forces of interest aren't the ones over which we have direct control, the actuated joints, like when there is a 2-link robotic arm with motors on each revolution joint but we wish to control the cartesian (x,y) position of the end-effector tool.
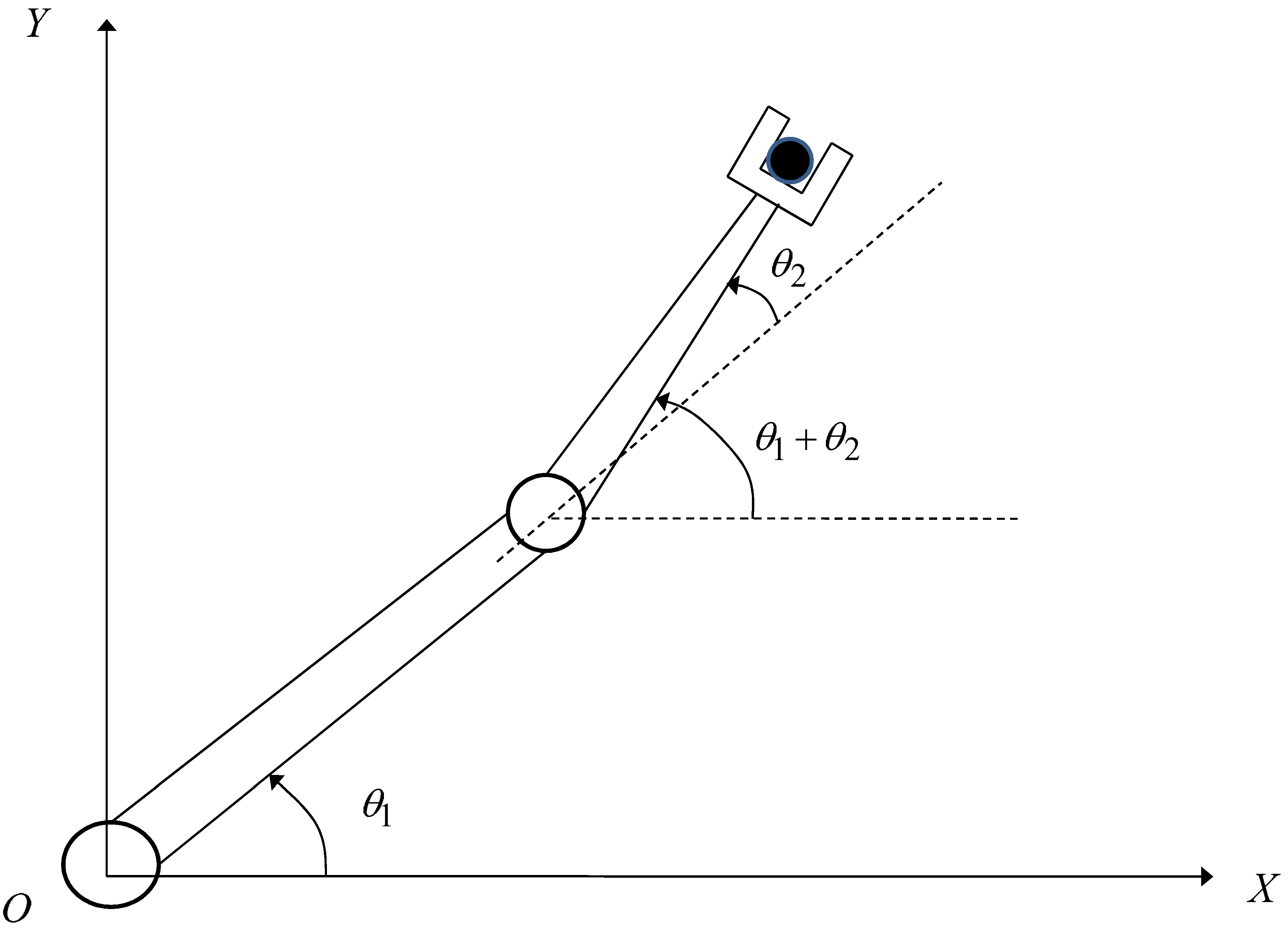
In those cases, simple per actuator control isn't enough, as the variables of interest depend on the combination of all joint values. There's need for a higher-level control pass, that considers the robot kinematics/dynamics as a whole.
In Robot Control Interface, those controlled robot variables/coordinates are named axes (as an analogy with joystick/gamepad axes that control motion). The higher-level control pass is responsible for performing conversions from joint to axis space for measurement, and from axis to joint space for actuator control setpoint calculation. It also involves things like joint impedance estimation and modulation based on axes data and reading of extra sensors, that aren't components of joint actuators (like contact ones).
With this, it is intended that robot control internals (for each plug-in implementation) are abstracted away, leaving the user/client to only worry about reading from joint/axes and writing to axes variables.
As, from user's point of view, axis or joint control is fundamentally the same, they alse use the same structure of double precision floating-point control variables:
| Position | Velocity | Force | Acceleration | Inertia | Stiffness | Damping |
|---|---|---|---|---|---|---|
| 8 bytes | 8 bytes | 8 bytes | 8 bytes | 8 bytes | 8 bytes | 8 bytes |
The interface also has methods for setting different states for the robot control, whose behaviour can be implemented by the plug-in developer
On a terminal, get the GitHub code repository with:
$ git clone https://github.com/EESC-MKGroup/Robot-Control-Interface [<my_project_folder>]
This code is dependent on macros from Plug-in Loader project, that is automatically linked as a git submodule.
To add that repository to your sources, navigate to the root project folder and clone it with:
$ cd <my_project_folder>
$ git submodule update --init
Robot Control Interface itself consists of a single header file of common variables and function declarations. Simply include it in both plug-in and host projects
Doxygen-generated detailed methods documentation is available on a GitHub Page