 + - **Google Cloud** Deep Learning VM. See [GCP Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/GCP-Quickstart)
+ - **Amazon** Deep Learning AMI. See [AWS Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/AWS-Quickstart)
+ - **Docker Image**. See [Docker Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/Docker-Quickstart)
+ - **Google Cloud** Deep Learning VM. See [GCP Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/GCP-Quickstart)
+ - **Amazon** Deep Learning AMI. See [AWS Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/AWS-Quickstart)
+ - **Docker Image**. See [Docker Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/Docker-Quickstart)  +
- If this is a bug report, please provide screenshots and **minimum viable code to reproduce your issue**, otherwise we can not help you.
+ ## Status
- If this is a custom model or data training question, please note Ultralytics does **not** provide free personal support. As a leader in vision ML and AI, we do offer professional consulting, from simple expert advice up to delivery of fully customized, end-to-end production solutions for our clients, such as:
- - **Cloud-based AI** systems operating on **hundreds of HD video streams in realtime.**
- - **Edge AI** integrated into custom iOS and Android apps for realtime **30 FPS video inference.**
- - **Custom data training**, hyperparameter evolution, and model exportation to any destination.
+ 
- For more information please visit https://www.ultralytics.com.
+ If this badge is green, all [YOLOv5 GitHub Actions](https://github.com/ultralytics/yolov5/actions) Continuous Integration (CI) tests are currently passing. CI tests verify correct operation of YOLOv5 training ([train.py](https://github.com/ultralytics/yolov5/blob/master/train.py)), validation ([val.py](https://github.com/ultralytics/yolov5/blob/master/val.py)), inference ([detect.py](https://github.com/ultralytics/yolov5/blob/master/detect.py)) and export ([export.py](https://github.com/ultralytics/yolov5/blob/master/export.py)) on MacOS, Windows, and Ubuntu every 24 hours and on every commit.
+
diff --git a/.github/workflows/stale.yml b/.github/workflows/stale.yml
index d4126b8b46d..c81c0ca18c2 100644
--- a/.github/workflows/stale.yml
+++ b/.github/workflows/stale.yml
@@ -1,3 +1,5 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+
name: Close stale issues
on:
schedule:
@@ -7,11 +9,29 @@ jobs:
stale:
runs-on: ubuntu-latest
steps:
- - uses: actions/stale@v1
+ - uses: actions/stale@v3
with:
repo-token: ${{ secrets.GITHUB_TOKEN }}
- stale-issue-message: 'This issue has been automatically marked as stale because it has not had recent activity. It will be closed if no further activity occurs. Thank you for your contributions.'
- stale-pr-message: 'This issue has been automatically marked as stale because it has not had recent activity. It will be closed if no further activity occurs. Thank you for your contributions.'
+ stale-issue-message: |
+ 👋 Hello, this issue has been automatically marked as stale because it has not had recent activity. Please note it will be closed if no further activity occurs.
+
+ Access additional [YOLOv5](https://ultralytics.com/yolov5) 🚀 resources:
+ - **Wiki** – https://github.com/ultralytics/yolov5/wiki
+ - **Tutorials** – https://github.com/ultralytics/yolov5#tutorials
+ - **Docs** – https://docs.ultralytics.com
+
+ Access additional [Ultralytics](https://ultralytics.com) ⚡ resources:
+ - **Ultralytics HUB** – https://ultralytics.com
+ - **Vision API** – https://ultralytics.com/yolov5
+ - **About Us** – https://ultralytics.com/about
+ - **Join Our Team** – https://ultralytics.com/work
+ - **Contact Us** – https://ultralytics.com/contact
+
+ Feel free to inform us of any other **issues** you discover or **feature requests** that come to mind in the future. Pull Requests (PRs) are also always welcomed!
+
+ Thank you for your contributions to YOLOv5 🚀 and Vision AI ⭐!
+
+ stale-pr-message: 'This issue has been automatically marked as stale because it has not had recent activity. It will be closed if no further activity occurs. Thank you for your contributions YOLOv5 🚀 and Vision AI ⭐.'
days-before-stale: 30
days-before-close: 5
exempt-issue-labels: 'documentation,tutorial'
diff --git a/.gitignore b/.gitignore
index 9da70b7e38c..0659d24c45d 100755
--- a/.gitignore
+++ b/.gitignore
@@ -19,6 +19,11 @@
*.avi
*.data
*.json
+*.ttf
+
+# Mojo files
+*.whl
+job.yml
#package
yolov5/*
@@ -29,8 +34,9 @@ yolov5/*
storage.googleapis.com
runs/*
data/*
-!data/samples/zidane.jpg
-!data/samples/bus.jpg
+!data/hyps/*
+!data/images/zidane.jpg
+!data/images/bus.jpg
!data/coco.names
!data/coco_paper.names
!data/coco.data
@@ -39,9 +45,12 @@ data/*
!data/trainvalno5k.shapes
!data/*.sh
-pycocotools/*
-results*.txt
-gcp_test*.sh
+results*.csv
+
+# Datasets -------------------------------------------------------------------------------------------------------------
+coco/
+coco128/
+VOC/
# MATLAB GitIgnore -----------------------------------------------------------------------------------------------------
*.m~
@@ -82,9 +91,11 @@ sdist/
var/
wheels/
*.egg-info/
+# wandb/
.installed.cfg
*.egg
+
# PyInstaller
# Usually these files are written by a python script from a template
# before PyInstaller builds the exe, so as to inject date/other infos into it.
diff --git a/CONTRIBUTING.md b/CONTRIBUTING.md
new file mode 100644
index 00000000000..38601775cae
--- /dev/null
+++ b/CONTRIBUTING.md
@@ -0,0 +1,94 @@
+## Contributing to YOLOv5 🚀
+
+We love your input! We want to make contributing to YOLOv5 as easy and transparent as possible, whether it's:
+
+- Reporting a bug
+- Discussing the current state of the code
+- Submitting a fix
+- Proposing a new feature
+- Becoming a maintainer
+
+YOLOv5 works so well due to our combined community effort, and for every small improvement you contribute you will be
+helping push the frontiers of what's possible in AI 😃!
+
+## Submitting a Pull Request (PR) 🛠️
+
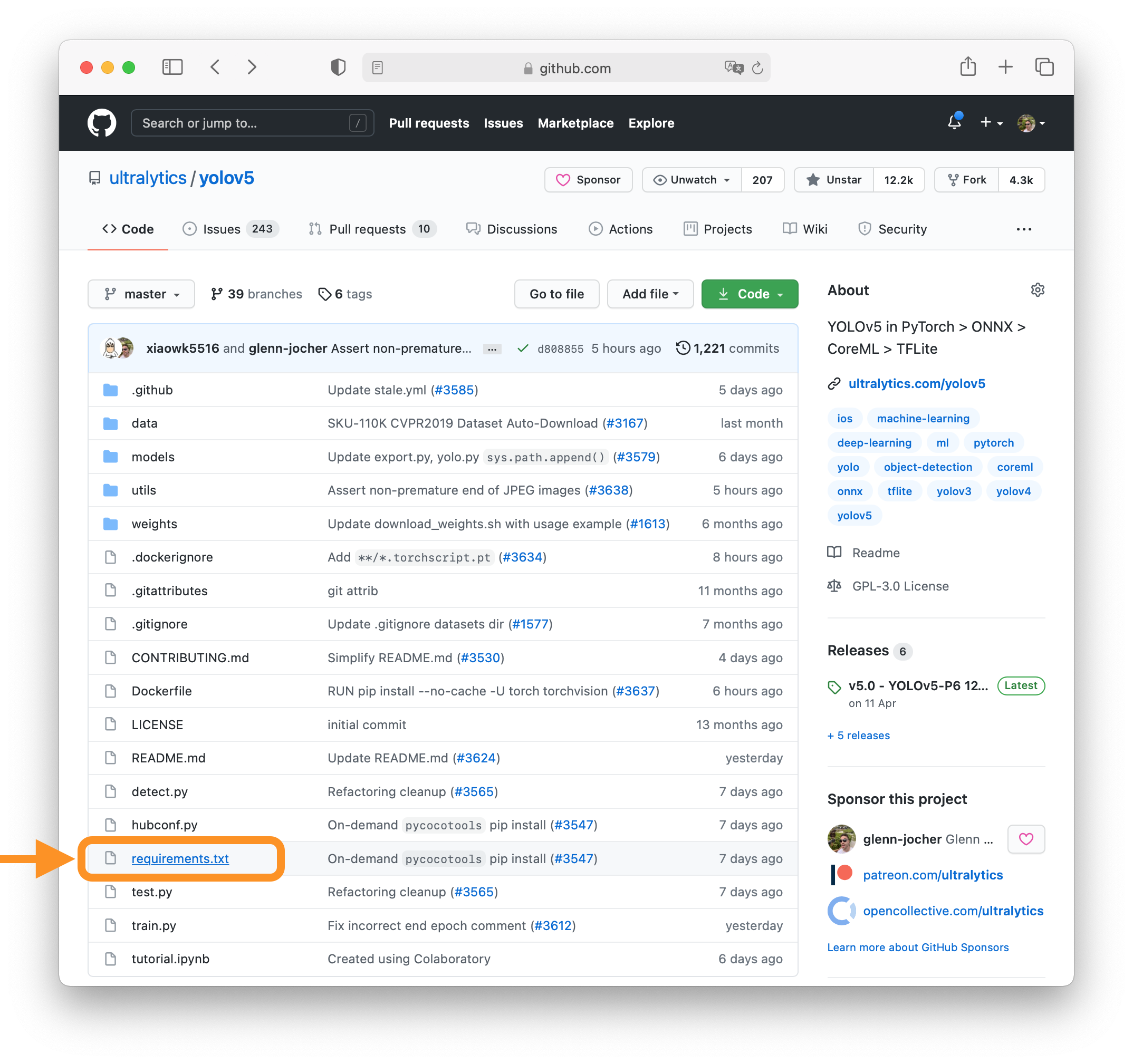
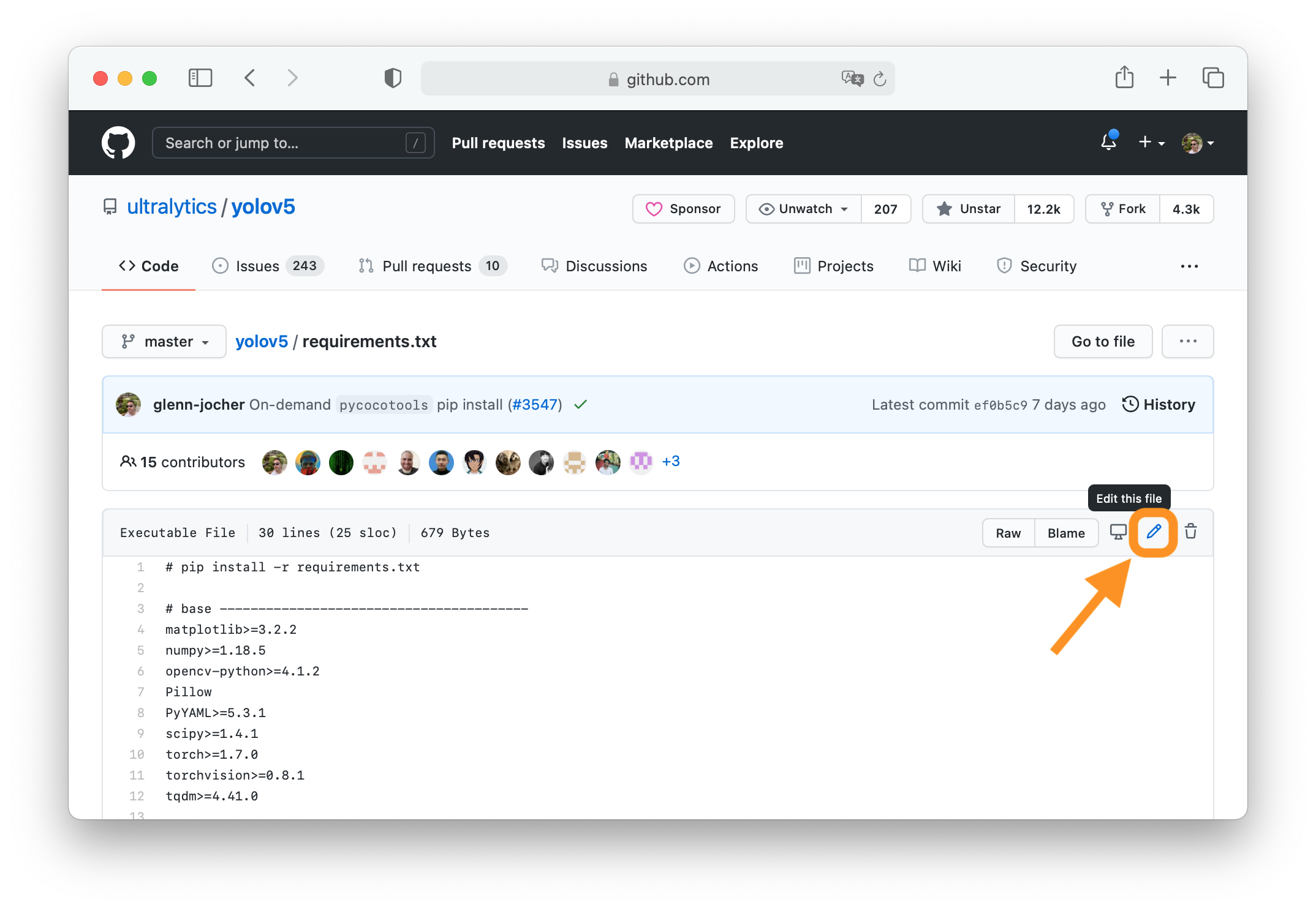
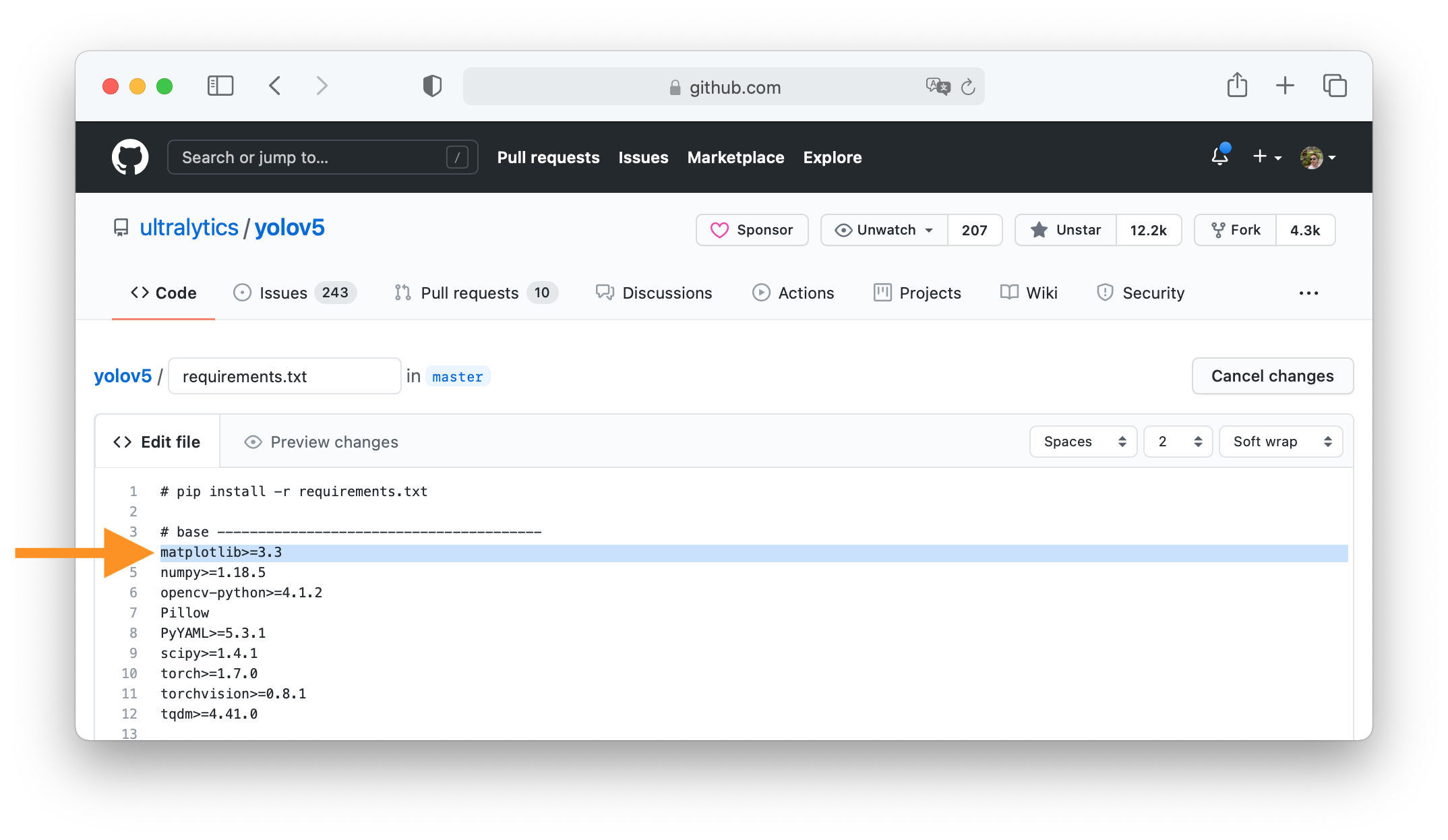
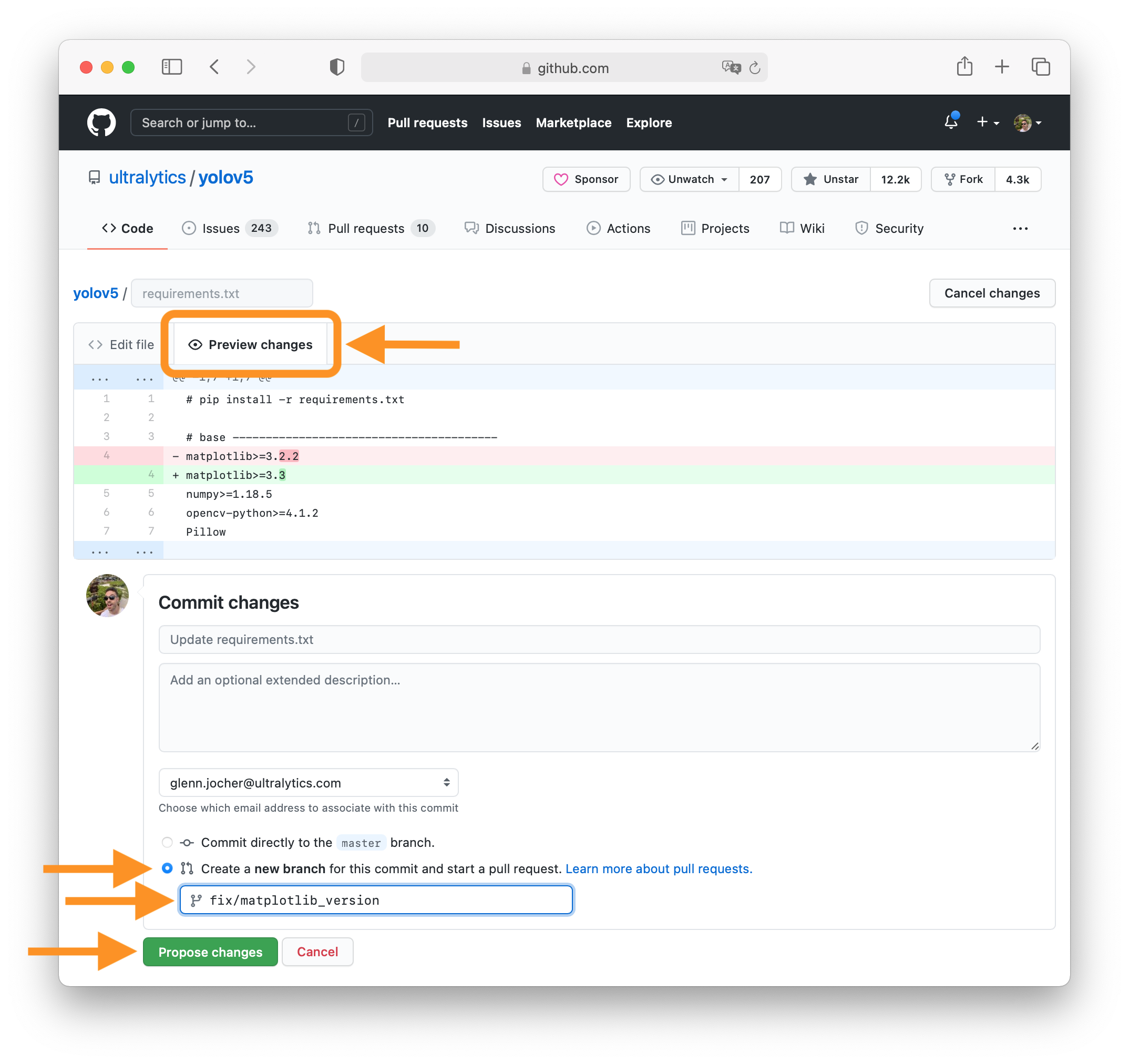
+Submitting a PR is easy! This example shows how to submit a PR for updating `requirements.txt` in 4 steps:
+
+### 1. Select File to Update
+
+Select `requirements.txt` to update by clicking on it in GitHub.
+
+
- If this is a bug report, please provide screenshots and **minimum viable code to reproduce your issue**, otherwise we can not help you.
+ ## Status
- If this is a custom model or data training question, please note Ultralytics does **not** provide free personal support. As a leader in vision ML and AI, we do offer professional consulting, from simple expert advice up to delivery of fully customized, end-to-end production solutions for our clients, such as:
- - **Cloud-based AI** systems operating on **hundreds of HD video streams in realtime.**
- - **Edge AI** integrated into custom iOS and Android apps for realtime **30 FPS video inference.**
- - **Custom data training**, hyperparameter evolution, and model exportation to any destination.
+ 
- For more information please visit https://www.ultralytics.com.
+ If this badge is green, all [YOLOv5 GitHub Actions](https://github.com/ultralytics/yolov5/actions) Continuous Integration (CI) tests are currently passing. CI tests verify correct operation of YOLOv5 training ([train.py](https://github.com/ultralytics/yolov5/blob/master/train.py)), validation ([val.py](https://github.com/ultralytics/yolov5/blob/master/val.py)), inference ([detect.py](https://github.com/ultralytics/yolov5/blob/master/detect.py)) and export ([export.py](https://github.com/ultralytics/yolov5/blob/master/export.py)) on MacOS, Windows, and Ubuntu every 24 hours and on every commit.
+
diff --git a/.github/workflows/stale.yml b/.github/workflows/stale.yml
index d4126b8b46d..c81c0ca18c2 100644
--- a/.github/workflows/stale.yml
+++ b/.github/workflows/stale.yml
@@ -1,3 +1,5 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+
name: Close stale issues
on:
schedule:
@@ -7,11 +9,29 @@ jobs:
stale:
runs-on: ubuntu-latest
steps:
- - uses: actions/stale@v1
+ - uses: actions/stale@v3
with:
repo-token: ${{ secrets.GITHUB_TOKEN }}
- stale-issue-message: 'This issue has been automatically marked as stale because it has not had recent activity. It will be closed if no further activity occurs. Thank you for your contributions.'
- stale-pr-message: 'This issue has been automatically marked as stale because it has not had recent activity. It will be closed if no further activity occurs. Thank you for your contributions.'
+ stale-issue-message: |
+ 👋 Hello, this issue has been automatically marked as stale because it has not had recent activity. Please note it will be closed if no further activity occurs.
+
+ Access additional [YOLOv5](https://ultralytics.com/yolov5) 🚀 resources:
+ - **Wiki** – https://github.com/ultralytics/yolov5/wiki
+ - **Tutorials** – https://github.com/ultralytics/yolov5#tutorials
+ - **Docs** – https://docs.ultralytics.com
+
+ Access additional [Ultralytics](https://ultralytics.com) ⚡ resources:
+ - **Ultralytics HUB** – https://ultralytics.com
+ - **Vision API** – https://ultralytics.com/yolov5
+ - **About Us** – https://ultralytics.com/about
+ - **Join Our Team** – https://ultralytics.com/work
+ - **Contact Us** – https://ultralytics.com/contact
+
+ Feel free to inform us of any other **issues** you discover or **feature requests** that come to mind in the future. Pull Requests (PRs) are also always welcomed!
+
+ Thank you for your contributions to YOLOv5 🚀 and Vision AI ⭐!
+
+ stale-pr-message: 'This issue has been automatically marked as stale because it has not had recent activity. It will be closed if no further activity occurs. Thank you for your contributions YOLOv5 🚀 and Vision AI ⭐.'
days-before-stale: 30
days-before-close: 5
exempt-issue-labels: 'documentation,tutorial'
diff --git a/.gitignore b/.gitignore
index 9da70b7e38c..0659d24c45d 100755
--- a/.gitignore
+++ b/.gitignore
@@ -19,6 +19,11 @@
*.avi
*.data
*.json
+*.ttf
+
+# Mojo files
+*.whl
+job.yml
#package
yolov5/*
@@ -29,8 +34,9 @@ yolov5/*
storage.googleapis.com
runs/*
data/*
-!data/samples/zidane.jpg
-!data/samples/bus.jpg
+!data/hyps/*
+!data/images/zidane.jpg
+!data/images/bus.jpg
!data/coco.names
!data/coco_paper.names
!data/coco.data
@@ -39,9 +45,12 @@ data/*
!data/trainvalno5k.shapes
!data/*.sh
-pycocotools/*
-results*.txt
-gcp_test*.sh
+results*.csv
+
+# Datasets -------------------------------------------------------------------------------------------------------------
+coco/
+coco128/
+VOC/
# MATLAB GitIgnore -----------------------------------------------------------------------------------------------------
*.m~
@@ -82,9 +91,11 @@ sdist/
var/
wheels/
*.egg-info/
+# wandb/
.installed.cfg
*.egg
+
# PyInstaller
# Usually these files are written by a python script from a template
# before PyInstaller builds the exe, so as to inject date/other infos into it.
diff --git a/CONTRIBUTING.md b/CONTRIBUTING.md
new file mode 100644
index 00000000000..38601775cae
--- /dev/null
+++ b/CONTRIBUTING.md
@@ -0,0 +1,94 @@
+## Contributing to YOLOv5 🚀
+
+We love your input! We want to make contributing to YOLOv5 as easy and transparent as possible, whether it's:
+
+- Reporting a bug
+- Discussing the current state of the code
+- Submitting a fix
+- Proposing a new feature
+- Becoming a maintainer
+
+YOLOv5 works so well due to our combined community effort, and for every small improvement you contribute you will be
+helping push the frontiers of what's possible in AI 😃!
+
+## Submitting a Pull Request (PR) 🛠️
+
+Submitting a PR is easy! This example shows how to submit a PR for updating `requirements.txt` in 4 steps:
+
+### 1. Select File to Update
+
+Select `requirements.txt` to update by clicking on it in GitHub.
+
 -
-
-
-
-This repository represents Ultralytics open-source research into future object detection methods, and incorporates our lessons learned and best practices evolved over training thousands of models on custom client datasets with our previous YOLO repository https://github.com/ultralytics/yolov3. **All code and models are under active development, and are subject to modification or deletion without notice.** Use at your own risk.
-
-
-
-
-
-
-This repository represents Ultralytics open-source research into future object detection methods, and incorporates our lessons learned and best practices evolved over training thousands of models on custom client datasets with our previous YOLO repository https://github.com/ultralytics/yolov3. **All code and models are under active development, and are subject to modification or deletion without notice.** Use at your own risk.
-
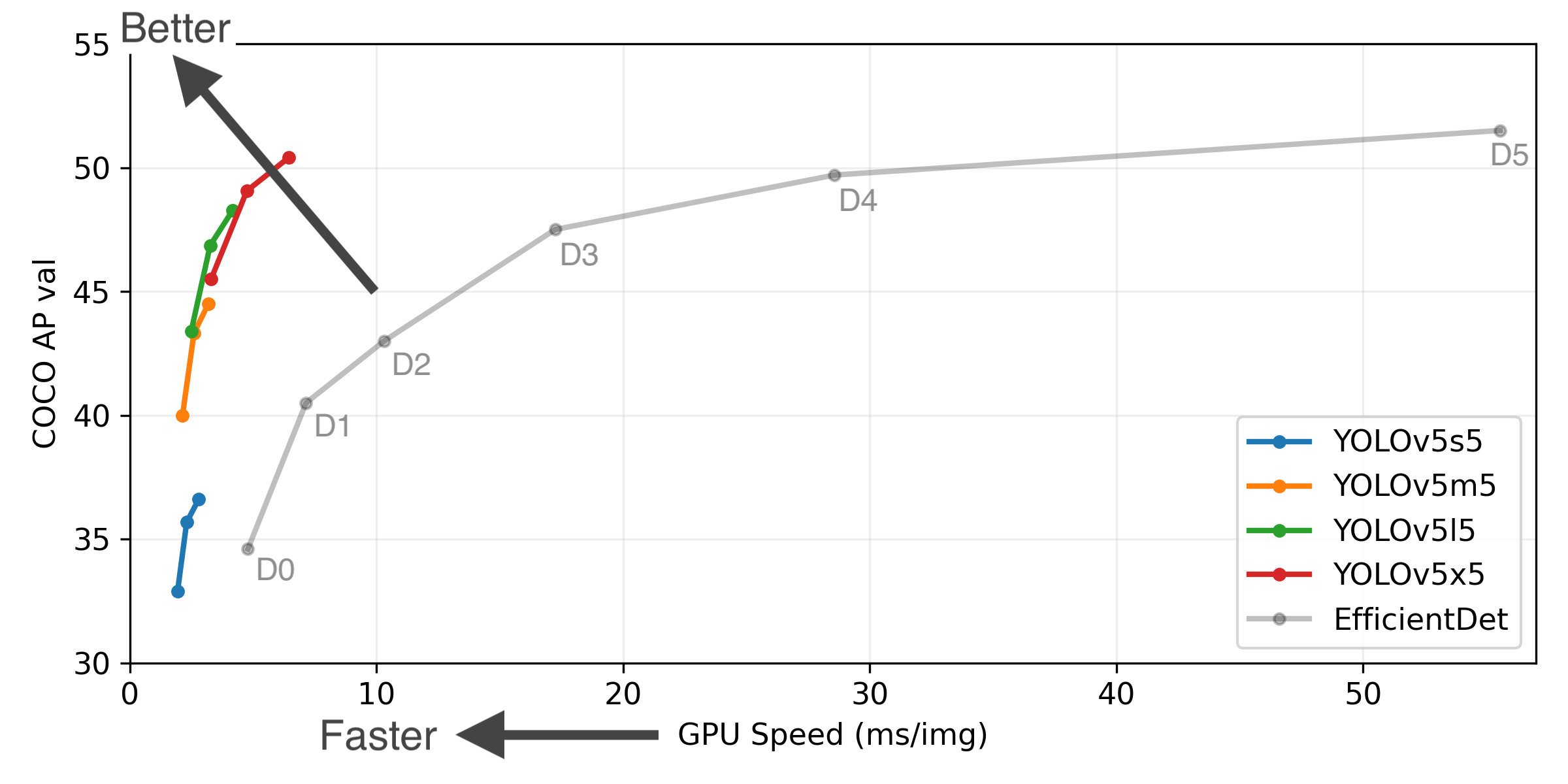
-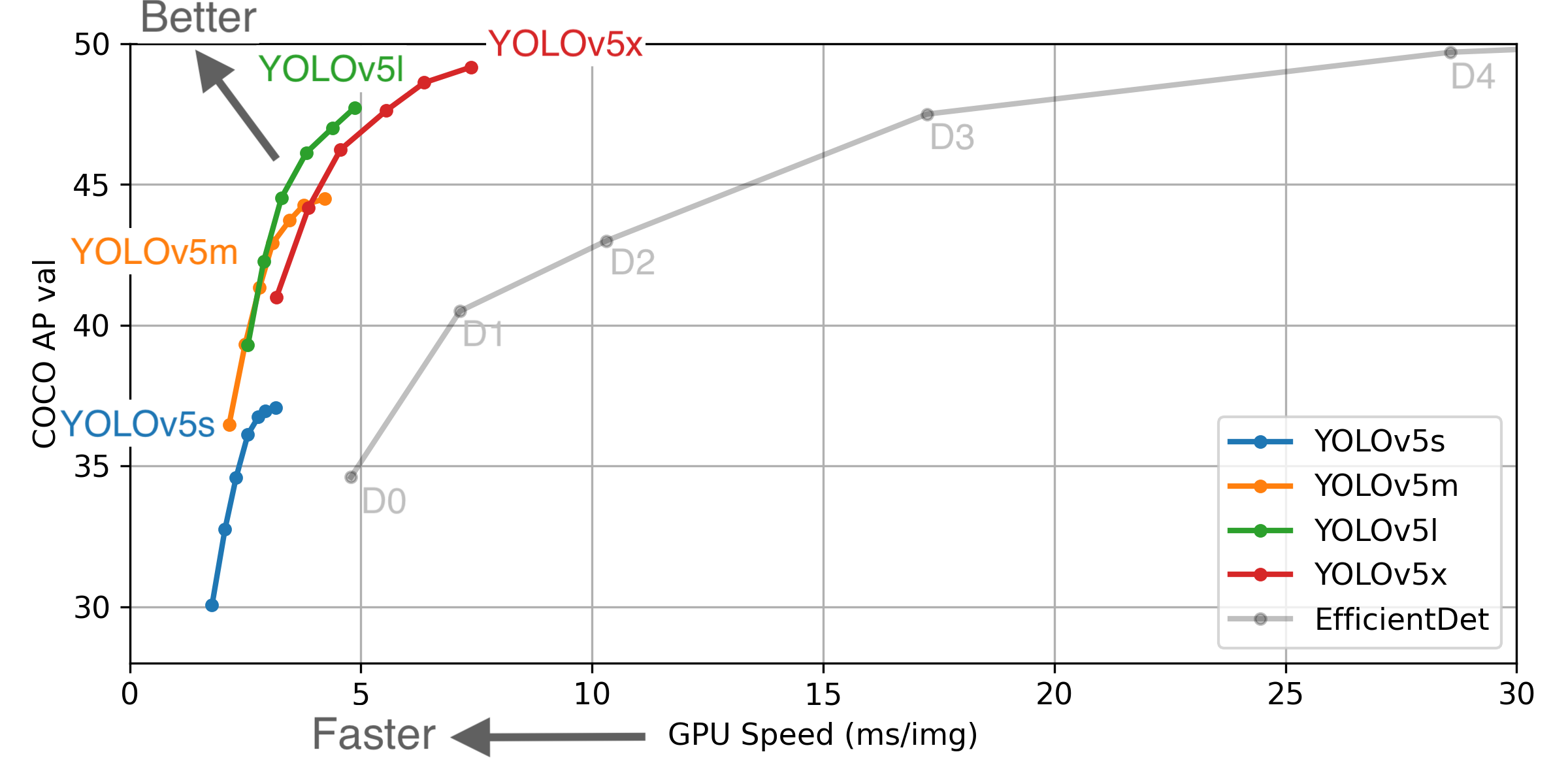 ** GPU Speed measures end-to-end time per image averaged over 5000 COCO val2017 images using a V100 GPU with batch size 32, and includes image preprocessing, PyTorch FP16 inference, postprocessing and NMS. EfficientDet data from [google/automl](https://github.com/google/automl) at batch size 8.
-
-- **August 13, 2020**: [v3.0 release](https://github.com/ultralytics/yolov5/releases/tag/v3.0): nn.Hardswish() activations, data autodownload, native AMP.
-- **July 23, 2020**: [v2.0 release](https://github.com/ultralytics/yolov5/releases/tag/v2.0): improved model definition, training and mAP.
-- **June 22, 2020**: [PANet](https://arxiv.org/abs/1803.01534) updates: new heads, reduced parameters, improved speed and mAP [364fcfd](https://github.com/ultralytics/yolov5/commit/364fcfd7dba53f46edd4f04c037a039c0a287972).
-- **June 19, 2020**: [FP16](https://pytorch.org/docs/stable/nn.html#torch.nn.Module.half) as new default for smaller checkpoints and faster inference [d4c6674](https://github.com/ultralytics/yolov5/commit/d4c6674c98e19df4c40e33a777610a18d1961145).
-- **June 9, 2020**: [CSP](https://github.com/WongKinYiu/CrossStagePartialNetworks) updates: improved speed, size, and accuracy (credit to @WongKinYiu for CSP).
-- **May 27, 2020**: Public release. YOLOv5 models are SOTA among all known YOLO implementations.
-- **April 1, 2020**: Start development of future compound-scaled [YOLOv3](https://github.com/ultralytics/yolov3)/[YOLOv4](https://github.com/AlexeyAB/darknet)-based PyTorch models.
-
-
-## Pretrained Checkpoints
-
-| Model | APval | APtest | AP50 | SpeedGPU | FPSGPU || params | FLOPS |
-|---------- |------ |------ |------ | -------- | ------| ------ |------ | :------: |
-| [YOLOv5s](https://github.com/ultralytics/yolov5/releases) | 37.0 | 37.0 | 56.2 | **2.4ms** | **416** || 7.5M | 13.2B
-| [YOLOv5m](https://github.com/ultralytics/yolov5/releases) | 44.3 | 44.3 | 63.2 | 3.4ms | 294 || 21.8M | 39.4B
-| [YOLOv5l](https://github.com/ultralytics/yolov5/releases) | 47.7 | 47.7 | 66.5 | 4.4ms | 227 || 47.8M | 88.1B
-| [YOLOv5x](https://github.com/ultralytics/yolov5/releases) | **49.2** | **49.2** | **67.7** | 6.9ms | 145 || 89.0M | 166.4B
-| | | | | | || |
-| [YOLOv5x](https://github.com/ultralytics/yolov5/releases) + TTA|**50.8**| **50.8** | **68.9** | 25.5ms | 39 || 89.0M | 354.3B
-| | | | | | || |
-| [YOLOv3-SPP](https://github.com/ultralytics/yolov5/releases) | 45.6 | 45.5 | 65.2 | 4.5ms | 222 || 63.0M | 118.0B
-
-** APtest denotes COCO [test-dev2017](http://cocodataset.org/#upload) server results, all other AP results in the table denote val2017 accuracy.
-** All AP numbers are for single-model single-scale without ensemble or test-time augmentation. **Reproduce** by `python test.py --data coco.yaml --img 640 --conf 0.001`
-** SpeedGPU measures end-to-end time per image averaged over 5000 COCO val2017 images using a GCP [n1-standard-16](https://cloud.google.com/compute/docs/machine-types#n1_standard_machine_types) instance with one V100 GPU, and includes image preprocessing, PyTorch FP16 image inference at --batch-size 32 --img-size 640, postprocessing and NMS. Average NMS time included in this chart is 1-2ms/img. **Reproduce** by `python test.py --data coco.yaml --img 640 --conf 0.1`
-** All checkpoints are trained to 300 epochs with default settings and hyperparameters (no autoaugmentation).
-** Test Time Augmentation ([TTA](https://github.com/ultralytics/yolov5/issues/303)) runs at 3 image sizes. **Reproduce** by `python test.py --data coco.yaml --img 832 --augment`
-
-## Requirements
-
-Python 3.8 or later with all [requirements.txt](https://github.com/ultralytics/yolov5/blob/master/requirements.txt) dependencies installed, including `torch>=1.6`. To install run:
-```bash
-$ pip install -r requirements.txt
-```
-
-### Install as Module
+
** GPU Speed measures end-to-end time per image averaged over 5000 COCO val2017 images using a V100 GPU with batch size 32, and includes image preprocessing, PyTorch FP16 inference, postprocessing and NMS. EfficientDet data from [google/automl](https://github.com/google/automl) at batch size 8.
-
-- **August 13, 2020**: [v3.0 release](https://github.com/ultralytics/yolov5/releases/tag/v3.0): nn.Hardswish() activations, data autodownload, native AMP.
-- **July 23, 2020**: [v2.0 release](https://github.com/ultralytics/yolov5/releases/tag/v2.0): improved model definition, training and mAP.
-- **June 22, 2020**: [PANet](https://arxiv.org/abs/1803.01534) updates: new heads, reduced parameters, improved speed and mAP [364fcfd](https://github.com/ultralytics/yolov5/commit/364fcfd7dba53f46edd4f04c037a039c0a287972).
-- **June 19, 2020**: [FP16](https://pytorch.org/docs/stable/nn.html#torch.nn.Module.half) as new default for smaller checkpoints and faster inference [d4c6674](https://github.com/ultralytics/yolov5/commit/d4c6674c98e19df4c40e33a777610a18d1961145).
-- **June 9, 2020**: [CSP](https://github.com/WongKinYiu/CrossStagePartialNetworks) updates: improved speed, size, and accuracy (credit to @WongKinYiu for CSP).
-- **May 27, 2020**: Public release. YOLOv5 models are SOTA among all known YOLO implementations.
-- **April 1, 2020**: Start development of future compound-scaled [YOLOv3](https://github.com/ultralytics/yolov3)/[YOLOv4](https://github.com/AlexeyAB/darknet)-based PyTorch models.
-
-
-## Pretrained Checkpoints
-
-| Model | APval | APtest | AP50 | SpeedGPU | FPSGPU || params | FLOPS |
-|---------- |------ |------ |------ | -------- | ------| ------ |------ | :------: |
-| [YOLOv5s](https://github.com/ultralytics/yolov5/releases) | 37.0 | 37.0 | 56.2 | **2.4ms** | **416** || 7.5M | 13.2B
-| [YOLOv5m](https://github.com/ultralytics/yolov5/releases) | 44.3 | 44.3 | 63.2 | 3.4ms | 294 || 21.8M | 39.4B
-| [YOLOv5l](https://github.com/ultralytics/yolov5/releases) | 47.7 | 47.7 | 66.5 | 4.4ms | 227 || 47.8M | 88.1B
-| [YOLOv5x](https://github.com/ultralytics/yolov5/releases) | **49.2** | **49.2** | **67.7** | 6.9ms | 145 || 89.0M | 166.4B
-| | | | | | || |
-| [YOLOv5x](https://github.com/ultralytics/yolov5/releases) + TTA|**50.8**| **50.8** | **68.9** | 25.5ms | 39 || 89.0M | 354.3B
-| | | | | | || |
-| [YOLOv3-SPP](https://github.com/ultralytics/yolov5/releases) | 45.6 | 45.5 | 65.2 | 4.5ms | 222 || 63.0M | 118.0B
-
-** APtest denotes COCO [test-dev2017](http://cocodataset.org/#upload) server results, all other AP results in the table denote val2017 accuracy.
-** All AP numbers are for single-model single-scale without ensemble or test-time augmentation. **Reproduce** by `python test.py --data coco.yaml --img 640 --conf 0.001`
-** SpeedGPU measures end-to-end time per image averaged over 5000 COCO val2017 images using a GCP [n1-standard-16](https://cloud.google.com/compute/docs/machine-types#n1_standard_machine_types) instance with one V100 GPU, and includes image preprocessing, PyTorch FP16 image inference at --batch-size 32 --img-size 640, postprocessing and NMS. Average NMS time included in this chart is 1-2ms/img. **Reproduce** by `python test.py --data coco.yaml --img 640 --conf 0.1`
-** All checkpoints are trained to 300 epochs with default settings and hyperparameters (no autoaugmentation).
-** Test Time Augmentation ([TTA](https://github.com/ultralytics/yolov5/issues/303)) runs at 3 image sizes. **Reproduce** by `python test.py --data coco.yaml --img 832 --augment`
-
-## Requirements
-
-Python 3.8 or later with all [requirements.txt](https://github.com/ultralytics/yolov5/blob/master/requirements.txt) dependencies installed, including `torch>=1.6`. To install run:
-```bash
-$ pip install -r requirements.txt
-```
-
-### Install as Module
+
+
+ +
+
+
++YOLOv5 🚀 is a family of object detection architectures and models pretrained on the COCO dataset, and represents Ultralytics + open-source research into future vision AI methods, incorporating lessons learned and best practices evolved over thousands of hours of research and development. +
+ + + + +Inference with YOLOv5 and [PyTorch Hub](https://github.com/ultralytics/yolov5/issues/36). Models automatically download
+from the [latest YOLOv5 release](https://github.com/ultralytics/yolov5/releases).
-### PyTorch Hub
-
-To run **batched inference** with YOLOv5 and [PyTorch Hub](https://github.com/ultralytics/yolov5/issues/36):
```python
import torch
-from PIL import Image
# Model
-model = torch.hub.load('ultralytics/yolov5', 'yolov5s', pretrained=True).fuse().eval() # yolov5s.pt
-model = model.autoshape() # for autoshaping of PIL/cv2/np inputs and NMS
+model = torch.hub.load('ultralytics/yolov5', 'yolov5s') # or yolov5m, yolov5l, yolov5x, custom
# Images
-img1 = Image.open('zidane.jpg')
-img2 = Image.open('bus.jpg')
-imgs = [img1, img2] # batched list of images
+img = 'https://ultralytics.com/images/zidane.jpg' # or file, Path, PIL, OpenCV, numpy, list
# Inference
-prediction = model(imgs, size=640) # includes NMS
-```
+results = model(img)
+# Results
+results.print() # or .show(), .save(), .crop(), .pandas(), etc.
+```
-## Nanovare Training
+
+Inference with YOLOv5 and [PyTorch Hub](https://github.com/ultralytics/yolov5/issues/36). Models automatically download
+from the [latest YOLOv5 release](https://github.com/ultralytics/yolov5/releases).
-### PyTorch Hub
-
-To run **batched inference** with YOLOv5 and [PyTorch Hub](https://github.com/ultralytics/yolov5/issues/36):
```python
import torch
-from PIL import Image
# Model
-model = torch.hub.load('ultralytics/yolov5', 'yolov5s', pretrained=True).fuse().eval() # yolov5s.pt
-model = model.autoshape() # for autoshaping of PIL/cv2/np inputs and NMS
+model = torch.hub.load('ultralytics/yolov5', 'yolov5s') # or yolov5m, yolov5l, yolov5x, custom
# Images
-img1 = Image.open('zidane.jpg')
-img2 = Image.open('bus.jpg')
-imgs = [img1, img2] # batched list of images
+img = 'https://ultralytics.com/images/zidane.jpg' # or file, Path, PIL, OpenCV, numpy, list
# Inference
-prediction = model(imgs, size=640) # includes NMS
-```
+results = model(img)
+# Results
+results.print() # or .show(), .save(), .crop(), .pandas(), etc.
+```
-## Nanovare Training
+ -
-
-## Citation
-[](https://zenodo.org/badge/latestdoi/264818686)
+
+
-
-
-## Citation
-[](https://zenodo.org/badge/latestdoi/264818686)
+
+
+
+  +
+

 \n",
+ "\n",
+ "
\n",
+ "\n",
+ " \n",
"\n",
- "This notebook was written by Ultralytics LLC, and is freely available for redistribution under the [GPL-3.0 license](https://choosealicense.com/licenses/gpl-3.0/). \n",
- "For more information please visit https://github.com/ultralytics/yolov5 and https://www.ultralytics.com."
+ "This is the **official YOLOv5 🚀 notebook** by **Ultralytics**, and is freely available for redistribution under the [GPL-3.0 license](https://choosealicense.com/licenses/gpl-3.0/). \n",
+ "For more information please visit https://github.com/ultralytics/yolov5 and https://ultralytics.com. Thank you!"
]
},
{
@@ -547,10 +399,10 @@
"cell_type": "code",
"metadata": {
"id": "wbvMlHd_QwMG",
- "outputId": "7e5e09a2-892e-4999-9e6c-567ea329eb38",
"colab": {
"base_uri": "https://localhost:8080/"
- }
+ },
+ "outputId": "4d67116a-43e9-4d84-d19e-1edd83f23a04"
},
"source": [
"!git clone https://github.com/ultralytics/yolov5 # clone repo\n",
@@ -559,17 +411,16 @@
"\n",
"import torch\n",
"from IPython.display import Image, clear_output # to display images\n",
- "from utils.google_utils import gdrive_download # to download models/datasets\n",
"\n",
"clear_output()\n",
- "print('Setup complete. Using torch %s %s' % (torch.__version__, torch.cuda.get_device_properties(0) if torch.cuda.is_available() else 'CPU'))"
+ "print(f\"Setup complete. Using torch {torch.__version__} ({torch.cuda.get_device_properties(0).name if torch.cuda.is_available() else 'CPU'})\")"
],
- "execution_count": 1,
+ "execution_count": null,
"outputs": [
{
"output_type": "stream",
"text": [
- "Setup complete. Using torch 1.7.0+cu101 _CudaDeviceProperties(name='Tesla V100-SXM2-16GB', major=7, minor=0, total_memory=16130MB, multi_processor_count=80)\n"
+ "Setup complete. Using torch 1.9.0+cu102 (Tesla V100-SXM2-16GB)\n"
],
"name": "stdout"
}
@@ -583,66 +434,59 @@
"source": [
"# 1. Inference\n",
"\n",
- "`detect.py` runs inference on a variety of sources, downloading models automatically from the [latest YOLOv5 release](https://github.com/ultralytics/yolov5/releases)."
+ "`detect.py` runs YOLOv5 inference on a variety of sources, downloading models automatically from the [latest YOLOv5 release](https://github.com/ultralytics/yolov5/releases), and saving results to `runs/detect`. Example inference sources are:\n",
+ "\n",
+ "```shell\n",
+ "python detect.py --source 0 # webcam\n",
+ " file.jpg # image \n",
+ " file.mp4 # video\n",
+ " path/ # directory\n",
+ " path/*.jpg # glob\n",
+ " 'https://youtu.be/NUsoVlDFqZg' # YouTube\n",
+ " 'rtsp://example.com/media.mp4' # RTSP, RTMP, HTTP stream\n",
+ "```"
]
},
{
"cell_type": "code",
"metadata": {
"id": "zR9ZbuQCH7FX",
- "outputId": "c9a308f7-2216-4805-8003-eca8dd0dc30d",
"colab": {
- "base_uri": "https://localhost:8080/",
- "height": 534
- }
+ "base_uri": "https://localhost:8080/"
+ },
+ "outputId": "8b728908-81ab-4861-edb0-4d0c46c439fb"
},
"source": [
- "!python detect.py --weights yolov5s.pt --img 640 --conf 0.25 --source inference/images/\n",
- "Image(filename='inference/output/zidane.jpg', width=600)"
+ "!python detect.py --weights yolov5s.pt --img 640 --conf 0.25 --source data/images/\n",
+ "Image(filename='runs/detect/exp/zidane.jpg', width=600)"
],
- "execution_count": 38,
+ "execution_count": null,
"outputs": [
{
"output_type": "stream",
"text": [
- "Namespace(agnostic_nms=False, augment=False, classes=None, conf_thres=0.25, device='', img_size=640, iou_thres=0.45, save_conf=False, save_dir='inference/output', save_txt=False, source='inference/images/', update=False, view_img=False, weights=['yolov5s.pt'])\n",
- "Using CUDA device0 _CudaDeviceProperties(name='Tesla V100-SXM2-16GB', total_memory=16130MB)\n",
+ "\u001b[34m\u001b[1mdetect: \u001b[0mweights=['yolov5s.pt'], source=data/images/, imgsz=640, conf_thres=0.25, iou_thres=0.45, max_det=1000, device=, view_img=False, save_txt=False, save_conf=False, save_crop=False, nosave=False, classes=None, agnostic_nms=False, augment=False, visualize=False, update=False, project=runs/detect, name=exp, exist_ok=False, line_thickness=3, hide_labels=False, hide_conf=False, half=False\n",
+ "YOLOv5 🚀 v5.0-367-g01cdb76 torch 1.9.0+cu102 CUDA:0 (Tesla V100-SXM2-16GB, 16160.5MB)\n",
"\n",
"Fusing layers... \n",
- "Model Summary: 140 layers, 7.45958e+06 parameters, 0 gradients\n",
- "image 1/2 /content/yolov5/inference/images/bus.jpg: 640x480 4 persons, 1 buss, 1 skateboards, Done. (0.012s)\n",
- "image 2/2 /content/yolov5/inference/images/zidane.jpg: 384x640 2 persons, 2 ties, Done. (0.012s)\n",
- "Results saved to inference/output\n",
- "Done. (0.113s)\n"
+ "Model Summary: 224 layers, 7266973 parameters, 0 gradients\n",
+ "image 1/2 /content/yolov5/data/images/bus.jpg: 640x480 4 persons, 1 bus, 1 fire hydrant, Done. (0.007s)\n",
+ "image 2/2 /content/yolov5/data/images/zidane.jpg: 384x640 2 persons, 2 ties, Done. (0.007s)\n",
+ "Results saved to \u001b[1mruns/detect/exp\u001b[0m\n",
+ "Done. (0.091s)\n"
],
"name": "stdout"
- },
- {
- "output_type": "execute_result",
- "data": {
- "image/jpeg": "/9j/4AAQSkZJRgABAQAAAQABAAD/2wBDAAIBAQEBAQIBAQECAgICAgQDAgICAgUEBAMEBgUGBgYFBgYGBwkIBgcJBwYGCAsICQoKCgoKBggLDAsKDAkKCgr/2wBDAQICAgICAgUDAwUKBwYHCgoKCgoKCgoKCgoKCgoKCgoKCgoKCgoKCgoKCgoKCgoKCgoKCgoKCgoKCgoKCgoKCgr/wAARCALQBQADASIAAhEBAxEB/8QAHwAAAQUBAQEBAQEAAAAAAAAAAAECAwQFBgcICQoL/8QAtRAAAgEDAwIEAwUFBAQAAAF9AQIDAAQRBRIhMUEGE1FhByJxFDKBkaEII0KxwRVS0fAkM2JyggkKFhcYGRolJicoKSo0NTY3ODk6Q0RFRkdISUpTVFVWV1hZWmNkZWZnaGlqc3R1dnd4eXqDhIWGh4iJipKTlJWWl5iZmqKjpKWmp6ipqrKztLW2t7i5usLDxMXGx8jJytLT1NXW19jZ2uHi4+Tl5ufo6erx8vP09fb3+Pn6/8QAHwEAAwEBAQEBAQEBAQAAAAAAAAECAwQFBgcICQoL/8QAtREAAgECBAQDBAcFBAQAAQJ3AAECAxEEBSExBhJBUQdhcRMiMoEIFEKRobHBCSMzUvAVYnLRChYkNOEl8RcYGRomJygpKjU2Nzg5OkNERUZHSElKU1RVVldYWVpjZGVmZ2hpanN0dXZ3eHl6goOEhYaHiImKkpOUlZaXmJmaoqOkpaanqKmqsrO0tba3uLm6wsPExcbHyMnK0tPU1dbX2Nna4uPk5ebn6Onq8vP09fb3+Pn6/9oADAMBAAIRAxEAPwD8347F5pkSP5t38P3ttaFjZzR2rzOMjfs+/wDNVi10+5kh877Gqv8AwfP96tOz0+2b99sw0e1drfxV87HY+wjHm94z4bOZ2WZ4dgV9vzN81Tx6a8jHvu+bd/DV+HT51uHd0Up95Pl21bhtfIkH2ncqfN8q/e21NS0dUbU4/ZMf7Oi52OzMu1UVU+an/wBjlW3w7l2t8y/3q3pNPRl2I+1tn/AqZZ280cXk3Nrub+7v+6tefKtLl5onZGm48qMqbQ3k/wBJeb5lb5PMf5l/2aZcaW6tshhyzffZn3ba3biHzI5USFfmX7tQyWc3zTXltuWPb+8jT+LbXJWxVWO534XDxkchrmm/KZt+d3yvurBm0maHLvu2su1G/vV3OsWsMe5xyWTd5bVh3VikkLJ5Pyqu7b/easaNacX7x6nsYyicrJYws3nom1m/vf3qWC3uYW32zr8v95v/AEGtK6s5I9iJuDMu51aq62827502Nt3Jur6zAylKUTlqREj+0wsiI7OzNuRW/wBr+7ViSPy4/wBzud9+1vm+Wq0aurIJtxdf4qtLayeX8nyusu5mb+KvqMPSlKJ58qnvco65uHaNpvlTdt2fJ8y0kjSbER3Vtq7tzJtqbyPtDLDNtx96nTKjR/Ii7t38X3a9D2fKebUkoy5SHyXjnP75l/i/3amSSVm+0v5joqbfv/Ky/wB6i3/fRrv+9911j+6rUsMMuxvJufu/fXZXPKXLE4OaUuaxPBv3b9n+r/hjl3LVqH9zJ/qV2t823/eqtbwpHGkP+qVn+dY/l/4FVuzZLqRI5plV13b12fdX+GvLxHvF04825p2cm1Ucopdvl+V9taVvDcSSK6fd+ZXrN0+GGS637F+V1aXd/d/hq7b75mX51Db9zMr/AC/7Py14WIqSNadHuaVjNLJCsP2pmTfuddvzNU8jO3yQ7X2/e/iaq8IeGNPLRW+bbu2fdq95n2OZXhhV2b5V3V4dap7+h6VOnHqWob792yI6o6orfLVCZJpPnudrBf4v97+KpmuIWmDzTKsrfdXft+7VCS5dpmR5o3/vq392uJSjztQOlx928hzbIZXSFFLs7fMqf6yopmubzY63jIVb7qrU32OGSP8AhRPveXHSyKluy/J975VXf/FWkqnNqLk5fdEntdy/3vl2eZs/76pU3yQyJsYeX8if3lqwsE0iy2zzfuvl/d/7VVr6O6WTf8yfe/d7/u1n71TRSMK0R8d1cxwrvRQv3dzfdWoprp75hNc3cjtHtSLzG+61OaGaS3RJnV1+88bVVkkRlKWtthlf+GspRhKRjH3Y8rKuoXtvHteN8qy7X/vVga9cXisrpcthkVfm/u1pXk00zAu+R/d/utWDq14+5n342/6rav3a78PFRj8JyVqhj6lM/wC8+8f/AB3dXManN82/fjd/CtdBqW+4bM0/Gzc1Yd48Pls/Vm+Xb/FXsUYy5NDxsVLmiYF9avt+07F21QVXmuNmzb/utW9cWbyR56hVqnHp7rMJvJ8xK9CnKMeU82T5hljlWZE3fN9//ZrodI3x7ntn+Rk2srfM1V9N03bGOdu7/wAdrVhs4I5BGiMk0f8ADJ8tEqhrToz+I1NLtUinR9+fLf5F/wDsa7bQZnjwibU2/N+7X5VrjdH/AHKxBE3f367TRZE+x7E2/wB1dv3mqo1PfOj2fuWOu0W4k+ziF5sOzfxfw11ui6uNyu6Mrqu1/Mfb8v8As1wWk3KOuy28xVVvnb+7W/puqQxsU3/eiVmj+9XZGpzmMoyj8R3Wn6kQN8Myh1f/AEfb93/eatXT9am8ve+1vvbmrgrHWd0iXOcFfl3L/F/wGtCHxB5K+d8wSR9qKq/M3/Aa6OYw9+J2q69C3zpZttX5Ub+9/vUybV4IYd+//WbtzL/CtcqutbYf3fmHc+1/mqvcawk3ybJCu/b9/wC9U/DAfunT/wBtusCv0/2d/wDDWbqGuosbO8jEt91tvystYN9q226ldH2xtt8qNX3f8B3VVvtUm2l3TLsnzLu/i/hqJRjI25vslPxRNDdZm85iv3fLb+GuMvJ3dXR/uK23/erW1PVHuomQXLFpJfkZvur/ALNZGqQ/aFb5G+V/3sa1x1I8x0UeaOjOa1SG2ml85Pv/AMO5vlWqtvbupYOmPLf5d3yturcbTkjdt6Mxb/lm38NQXWnpJcM8iSO38Un8K1nKn7p2RqQ5tTPWFJpD5czIn97726mTWVzIHfez+Z/yz/vVZa1eSTZDCqqqNu+fbSLYwzRuXhxufd9/71cNSnI0lUM2SN1CwpMuyT5tv/stJbxurI/nL+8ba0cn92tXybaOSHyYfuxbtrN8v3qq3Eltu+0+T86tt+VK5q1P3tCoVOXWRbtWdcoltv2tu2t8u6uj01na3TZuAVt27+61YNu7s0jzbWlb5U/hrQ0+aGObzo3bzl+X7/y7q+Ox1GXNKTPewtT4ZI7LT2T/AFM03mt8q7v4a0WuvLUI+6H5v9Wvzbv+BVzVnfTeSH/55q25d/3m/wBmp/7UdpI+Nqt8rbWr5DEYeUqp9DRrfDzG5cXySsN9zuVot6qybvu1m3mpRrD5iO0KSRbvlf5aqSal8zbNuPm2/J8q1Uk1QSM73KKrrF8nlr8u6tKOHUZe8dvtOhPeahD5yc7v3X975t1Zs0zrsfo2/wCZW/h/4FS3F4jKkEyMXX5X3fdaqzLBNJscrsZNqqv8NexhcPGPuozqVOWHKJe+c0hf7Tv3fL8tVri3DSPD9pUyr/F91d1aEljH/wAvMylG+4yp91aktdPeRc+Tv+f5fk3V9XluH5dTwcdiIx+0YLK6tvfcKry6bN5ezZ+7b/lpG+35q7BfDiNa+XNC37xtq7m27qdY+DXuN0m/hX/1f8NfY4ej7lz5XGYjm+E5C10e/Ece+2+fdtXb81XF8P7bqPztwkVGV9vyrt/2a7ux8KzRyJCkLM6/Nt3/ACtU7eDXkmj811Ty2+f91ub5q1lTjGZwRrcp5wuihpJIPmZGf/v2tQDwrMzHyXbZ93aqV6ovg/y5FT7zL99VT7y0kngvM3nfZmQbWZFWuKpR5vdN6dbl+0eUyeG7mO4Dp0Zf/Hqfp+jzQtLNczZK/wAP92vS28HmaOL/AEXa21n/AOA1m3HhWaxmm32fySIv+1uX/drxsVR+yejh63N7xysmnwxqrwp5rtztV/4f/iqJLRLVVT7HIo2bd27+Kuqj8Nos29BiKRdySN/d/u1UvrN/MhhmtmH/AE0rzJRl9hnbGpLm1Obmt5LfPkoxdvmdqpGzTzks33MrRbvL37WrevtPmkuNk3zLI27958tZd1bJZ3mz94Xk/vN8taxl9kr4vhM9YUt2SFJtq/8AXX5vlqb7PNdTPNM6r5iLsVf4f9qnzW8KM72yKpX+KrDWf7vYJtoXb95vmrS8fi5iPe5iCGSZrdYfObYvy7v7zLUNxcFVaNHaM/Mu3/ZqzInkxhGm+79xf7tZN1I7L9/HzfPu/irejTlUkYyqcseWRDM0Plu8kzfc+6v8VZ0cszN87qPm+fy/m2rVm6Z7iTyfl2xpt8yNdu6qk0nlqXh2hG+4y161GmeZWqSjL3SNpEZfJjhXb/D/ALVIq/ut83zf3fmpkbIrDftC7P4fvbqVVTCPHBtH8MbN/FXV7P7RjGt7xGq3O48Z2/N8vy7qfIszRq6Pj+9u+9VhbXbJs3/MqfP8u75qVbVMt5j/ADfe2rTfvfEbxqe5ykSXj/Y3DzSBv4Kt2zIsa70y+/dtb/0KmW8aW6tcvM21fl3bPutWlHYO1vvmhYf3JF/irel8ISrT5CssYM/7l2Rm/vfLUNxpsysNm4fLtfd92tVdI+UvezbXZP71X9I8Ga14hMh0DQri+EWzzRFEWC5zjOOnQ/lXrYalXxNRU6MXKT2STbfyWpxuTnLlgm32RyMmkvtY72Z93y/N92si+sXkupk2MNvy7a9Pl+E3jiRk2+BtTz3JtWx/Ks7Ufg98Q1K/ZvBGqvlfmxYt/hXrxyPOv+gap/4BL/I5qmDxcv8Al1L/AMBf+R5Lqmkutrvdm3r8yMtc1qmmlv8Ab+8te0X3wT+JchMa/D/WCGXLEWLnn8qwr74BfFhi0dv8NNZ2Hp/oD/4U45HnX2sNU/8AAJf5HDUy/Hy/5dS/8Bf+R4Vqlrc28jI6fKv8VUvJmkH8TbvmdVr2DV/2cPjTJBttvhTrROMcabIf6Vz837Mvx5H7v/hUXiHH95NKl/wq5ZJnXLf6tU/8Al/kY/2fj/h9lL/wF/5HARw+Wd+9v92rlrbTSXGx5mZW/vV2sP7NXx13Av8ACDxGfc6VL/hWlZ/s7fG5U82X4P66GxjH9kyf4Vw1clzxx/3Wp/4BL/I6Y5djv+fUv/AX/kcfb2fksr/+Oq1adrbvMqo/ys33Pm212Np+z38ZwUf/AIVbrqKFyR/ZsgOfyrRh+AXxcjRm/wCFZa3uP3f+JZJ/hXHLJM7/AOgSr/4Ll/kdtPLsY96cvuf+Rx0cMkbbEfdWhaxO3753Zd38O77tdVbfAr4tyuwufhrrgCr8pOnyfN+lWbX4G/FpVDn4b6wGAYLmwfgflXPLI8++zhKv/guf+R108uxcf+XcvuZy6wvtabDf7W6jzN0iPvZR8uzzK7OP4KfFRkIj+HWsq+xuXsXxu/KlPwQ+KrBVk+H2rnav/QPf/CsP7Cz3m1wtX/wXP/I744HFdIP7mcpCtzNIRDtbb/DJUMizKuwQ7dqfe/iVq69vgt8Vf4PhtrQ29D9jf/CiL4HfGK/lW1sfhVr8zf8APOLTJGZvwAzWryXPErvCVf8AwXL/ACNYYLEOWsH9zOJmjhb5PmLL8yM33t396mzSTRsr7Fd1Tb9+utv/AIEfF21Lx/8ACsfECSl8SRPpsgKH6EVUk+CfxeWUlPhfr2W6gabJgfpTjkmfSj/ulX/wXL/Ip4LF/wAj+5nNtM7EI0+xV/hWp7eZGwn3X/i+atmT4J/GHIZPhdrudvP/ABKpOP0q5pv7Pnx9vibuy+C/iaZVfaJY9GmcH8Qtb/2FnahzSwtRf9uS/wAh+wxKlrB/czJh1CazmKO6uzJj+98taVvqD+WHd2LfeWnx/Bf4zwztK/w21zcG2lTpsn+FaWn/AAC+Pl7CZbL4O+Jp4ifkeHSJmVT6ZC1vHJc6pLmlhqi/7cl/kc88PjFK/I/uZlyakkP+pdVZm3M1QNqzzK3nPk7/AJljeuhP7Pn7RbhQ3wT8VAAYLDQJ92P7v3awPEnw1+JnhWyl1rxB4F1a0toCBPNdafIiQ5O0biRgckDnuacsmzOMHUlh5pLVvklZLu9NDlqU8Sot8jsvJmbqGoJMrbPlXb/E9ULjWCtsE6j+9WfNep5g42/8DqrdaomXTf8ALs+balcUY8u55NbFS6FqTUHaNXCMwas261J2kOeBs3Lu/iaq8l58pmhfb8vytWXdawFjb58t/dpyOeNbl0Ld1fTbt4mVFZfn2vWfNdJI3zuwH8DVTuNSuJOqLt/u1Va82/Oh/wC+a56nNE9CjiveNCS+eF98aMwX+Kh77cyzvN96s0zP5nzzcf3aljuEab9z/DXFWifS4XEc3KlI0HuPNGxH+ZvvbqktZ3jbY75C/das/wA5JJGdPvMnyK1WrW3uZJkT+7/FXHUjyxPfw+I5S/G7yHZM2/8A3v4ateSjR/I+NtUoflben975quRqixsyOzM38P8AdrllHlPeo4jmHqvk7dif7+7+KpJJJvOTf/wHdUTRuI9kz7t33amVXjiCTP8Adb5t1YSid8a0dgX5meB+iv8A+PVK8z+SJnfLt/d/hqDa8fKHhmoZtqt3bdtSlLmNvrRbVtuAk3y/+zVGJk/jT5o3qFpJ2jZPOyy/NtX71NaRFz8ir/Czf3qcaPMH1rm0JJ7h1Vnd1dW/8dqDzHkHmK/8X3aTa7s0Py//ABVV2byZN6JtK/K3z1v7PliclXGcurLM0yLh0h3fwtTFk2q2x2D/AN3fVJrpFY+Vu/21qP7chXncm7+Jq3jGR52IxkbFybUJvlfyVVm+Zqq3E3mKd83FRtMm5tnzL/BVRr5/M2bFUN99a6qcZHz+KxXNAtrP50bIHYK38NNjkDN5EzqrfNVKOYwJvR12K1SrdPcNvR/mX/x6uuMT5vFVoyNG3kdWV3mxWhbuiqr+d8v8f+1WPp58xnR/7+379atlHDIuNmVX+Grj73xHkyrGnZyO395Vbb8y1raer3Ejb33fwvub7y1nabDH5m+GHhtvzSVtaXZ/xzRrhfu7aInmyqcxr2VnNJE3zqEk/hX71dPpdrtjjf8AeSstZeh2L/I6Ip2rt+b+Guk8O2aW67LmFdsa/N8/3aoxlI39Ls0VU3pjcm5F/u1r2Vo8i7HhyzNu3R0zQ7OTy40httu5Ny/7VdJY2KMuyHdvVW37kro+I5/aGJNYpNC28tjavy/3WqZ7GFo1h37fl3OrfwtWtHo8022GaHbu/i/hqKbT3WRnfcn8Hyv822ly/aOmjL3zFis5mkFz8zlvl3b/ALu2npY/6QZpptgk27/722r62aQt5Nt5n7z+GT7y1FdWO2FfLfJVPustTKMeXmPewsvdM/ULO2kZZkRnX7RtRm/h/wBqub1rT5lkbZN/F95WrsLiOH+NJNv8DL/ermNUi+y5fYvzM3yq275qcYwl7x72Gj8Kkee69YvNC80L+cjN8jN/6DXE+JNPfcyb2O75fl+9XqHiCHcrfIy/P+6b+7XGa5Z+dG6JG3y/MjVyVpfzHqxwvN7x7Vp8NtCrvMm8eb95fvK1S28T3DOnkx+Urs0TL8rK1VoLiBWY2bqUjb7zL95v/iant77/AEjyfszPtVd1eNGPLA+e9pyl+xtXjb/SUV/l3J/FWjC0MinyX/g2orL8y/8AAqz47jyW2PJ+6Z9yxqn3f+BVehbtcvhFXcjf7VefXk/5TupVOaVxLqOFZCj7WPlKrrG3zfN/FUUdq8ciu7sGWp7iRPtDpIil9m/5U+WRqY1siq58lX/j+VvlWuKpUlHc9CnHm+EbarDM02+GRt0u3yW/9Coe12uIXufKRv8AWqzfdpI4937503IqMzqvy7amihgkjO+GR3++vy/7NefUqcsz0KMfc5jCks0vJpvJdflfbFI33qzri3kmuDc7MlV27vl+9XRX0MyqblJoV2yr8uysya3hjV08lfmqqPN7U6OaJzV4rwyM7quP4G2fdrI8lLiTY80m2H7nz11WpWv7vem77vzKy/w1g3Gmp8r+WqfL8n95q+wy3mjLUxqcv2Situk+5/O3eW7I/wDDuqzDG9nCH2Nt3/eVd1RTK80ZTf8AOu1fl/vf7VSRqkfkwIm3/vpt1fXUZHj4qpGMWSWs3mN8+5f7rMv3qjnZ7qF0R9u5/vfdqxIr7o3G7+9taq7MIV2O67t/zr/drq9ofPVK0ucVLV9q/Plv4F31JDM+0v8Aw/7NRF3jwmzCsnybf4lqONpp5vOebbt+VFrKpIiMpfCX4WeSYul4r7futs2/8Bq3DJBDD/pPVt2+P+9trJhWFv7zsr/N81akLTfIny7vvff27Vrx8ZKPN8R3UYy+I2bVdrJMib0k2t+7+993+KtK3t7OaN3dPNO35WX5axIWS0Z32bty7VMdbdveLbwo+xUVU2bV+avnsRU97mPQo0/5i7C0k0bbyzOsX71tm1f+A06G427vszthk27W/h/3qqtdOq+Sj7n/AIY2/u1Fcag4Z3uYVXcy/wCr+VVrwMRKSPSp04/aLn9o7v8ARn8vav3W/wBmkVbO4ZbmaFn8v5f3afNtqGCRFklSWaGT+L94v3V/u0QyPFIIYQ3lbvm/hb/7Ksaf7szqe8XbO3S6jTY7LF/C33WqePyZFlR9u2Nv4vmakt1Tj7SY0H30WSpJI5lhX/RsnbuZmbdt+b7tVUqX6GUVL3SMxzRgwpNCu7+Lf91ajaO5kka5m+ZG/h3bq0Lf7THhJoY0Xb8iqv3qrzWsyyMkNzlm+6rbV21NPTZ3JqfCZ8kaXExhTdlot27+Ff8AZqtdNNbr86bZWTbtVa1VhdlD7GQs/wA0e373+1RNZ2aoIdjbm+VP71KVTlkc0uaMTl9SsUhUyJudv4lVqwtStwtqLaZMvJ/Ev3mrsNSs4biLMN4xLfK67P7tYOrWvkSM83ysqqvmKv3lr0sPzT5W/hPJrOcuY4y+hSNPJ2N8vy/M1ZkNjDcZ+RQ6ttX/AGq6TUIYZjJC+1d3z+X/AA1RmtYZ5lSHaiq/zrXrwlJwkeVUjIxfsDzXBdNyfw+W1Ot9Lkz8+7Zt3L/s10Xl+XJvS23Bmp0dijRt5Myp/syJ92m6zjG3QSpxjLmMWHS0jh8xId7bvl3fLSzRpDN5MwyZE+b5/mrX1C12ybPm3fKy+X/EtUry28mbfMn3k+RqqMve8jqjTHafcQ+YkGxfN+78r/dWug024aGP+HG7duX+7WDZ27+WzvDGzfeRlatjT7yT7Os0yZbf95aIy5pe6a8v8x02l30y7k+9uTcjN97bWrHdJJbo++Quqbkkjfburm7KHyLj7TCjfc+dletVZoGt/wB9BuDbvvPt/h/hrup1P5jjqQ7mxY648MiokeEbarMy/wAX+zVxfEEMLLD9p37X+b5q5r7YmYrbfNvWL7rfd/3qinmdpC7uw2/N8tdkahxy906tfFCSSMU3Ax/Lu2/L81Jb60l18m9WZXb95G3y1zEeqIsaiZNrSfM0b/w1Nb6lDHGpKfxfe3fLtrfm9wiMoROjbVE2hH6L/D/eqjPs8wpDDlJn+dd27bWba3UM3yb2O77kf8NWYw8itJbblVv7rVFT4SebmmMmuJpFP2lNnktsT/aX+GpobXgyeSuf4Y1+7V2GzeaFXeRWZk+81W/sq/IXTY3yov8Avf3qw9nzG0cROJi3WlvG/mPbK38KbqzLjR7lYWdIcPu+9Ia7aTTRdXAmS2/h+ST+H5arSaDM0x+0ozJv3bVeqjHl90qOI984yTR0W3kdEwF+aX5f4qp/Ybn5BM8e5vm/d11V5ptyvm20MPKtufd8u5f7tVLjR/s9ud8K79nyeWtYSpm8cRyyOauIYY7eL5P49yMtU7izT5XdGbc27/eroZrCGNW2Q8r827+7WbqEaRzNGkzJ5nzbtn3q4qlMuNYoQ3jrI33vvbfm/hq5Y7DJ+5dQq/wyPWe0c0cjI6L83yqrNUtvZ+WpTYxlb7jfeWvnswwvc9nD4rl1N+yunWVd6KWV93/AamlvIY5f33HmT/Kv+zVPSYUXKu7Nt+X5nrRhsZmk/dpwu1kaT71fF1MH+91Po8PiuaF5CNbosnzv5Qbds+eq8027dvtsnZtTd/6E1ai2rzfuRZ7/AC03/N93dSrpE98sWyyVpNnz7vlX/vqoo4OcavPI9SNb3DKgjNxMkPzLu/vfdrQj0va3nQou3cvzf3q1NP0HzJGf5ZW3/wAL/L/u1o2ugwwyCH7GyGOXb977te/g8L7WV1E48RjIU9zHj0tNsvnfPu+8v92tOx8N3lxHHDNYbjDtfcqf+PV0Fn4XRpF2Q7f3v3m/irf0/wALwwx/PuVlf5Nrf+O19bgcO4xiuU+Yx2KVTmZzVh4f8+Pe8Kld22Jm+ZVq/b+FZm+dPnRW+9H92up0/S0jhhjRGil37ty/Mvy/3qvWeg7l+eZYl+Y7f9rdX0mHj7p89Uqcuhztn4d8z50sG2/89P7zVfs/Dc0qvD9m8oxvXT6X4ZRjJCLfZtZvK8tvl/4FWnY+HYbWFEfcq7t6/wD2VdMqZySrSlLQ5CTwvCsKfZkZljl3S/uqbcaDbQ/6ZCjeV/D8n8Vd5Ho810q+Sir8/wC9Zf4l/hpt54ZmWR0+V4vu/wB3atcNSiHtDzG48LzSK3yYC/NuX+Jf9qsy68Pvayb38yR9nyM392vUdU0WGNSiQtsjT/lj91v96ua1LSRIwh3/ADyfcWRflX/erzK1HmO/C1jhLzR5ncTJbMi/wLJt+ZqxNS0fyZGe58zcybdrfL5bV3Osx+XdPDvX5fuTfwVzd5bvNcI7zbYWZm3TPu3Nt/vV4MsLKLke/RxUTjrzT7lpA7wq3lptdl+bbXP61C9vveGFnT5WSXbXZ67DuuAmxl3fNuV/4awdYhdl+T5lX7lYuHU6lLuYCypCzzDrs27W/i/3alk/0i4PyLt27tzU+4s3hmdgkbBv4m/hao5pHkj3x7R5ibdrfw1rTpwcvcMvae7ZyM+5uoWt/wBzbNtZ2+b/ANmrJu9833IWHy/LV7UGePaiuxVk3bvusq1UuA7/AHGUv/D8n3q9PD04Hl4iXvXM+Oa2kj3puDqu7d/eqnLN5i7H+RV/8eq3qGxlZ0RkC/f21Raby4wghWYN9za/zLXfGPL7xySqc3ulmO3eZVP3yqbtu3atEMgbajp5b/3lqPYm4yI/7r+6rfNU8N1+887y2+Z9u1fm3VcfeMvQs28aMzB4Y2Xb8rL/AMtP96r8Ni8kbfuflk+/UFrDtYuibG/u1s2Nv5sKI/y7v4W/iq3KUYlxlL4ipZ6fBD9/a6s/zR1o2enx71Tzt+7/AJZr92rcNjbSKiTBcyfxba0LDTYYmEMKMyxr97/a/vVZftOaPulb+zd4XZjcr/Iq16f+znpdy8V/bWljI0s80EcUaIWaV/mAwBySTgYrk9N0eeRlTZ8zfxf3a+mf+CUtvHpP7Zvw9+0CRwfHemx4STYQTLgHODxkgkdwCOM5r9C8McW8u4up4tR5vZ060rbX5aM3a/S9rXPRyLEeyzeM7X5VN29ISZseGf2SP2pPGT30Xhf9nfxpetpl21pqKQ+Grkm2nX70Tgp8rjjKnkZGRzXD67oOueF9ZufDvibRrrTtQspmivLG+t2imgkU4KOjAFWB6gjNfpN/wUz/AOCoH7Sf7Pf7S9x8E/gvcaVpNhollay3V1caal1NfSzRLKQ3mZCIqsqgKA2dxLHIC5X7W114P/4KCf8ABNy2/baufBFhpvj3wdOtlrFxZ3BjTylnWOaEBmO+M+dHMiOS6Fiqsdzb/wCgsp8QOJvZ5fjs3wVOnhMbKEISp1HKcJVF+79omkuWfeL93rro/uMNnOP5aNbE0kqdVpJqV2nLa6aWj8tup+fPgnwJ42+JPiODwh8PfCWpa5qt1n7Pp2lWT3E0mBkkIgJIA5J7Ctb4m/Aj41fBc2v/AAtv4UeIfDYvd32N9a0mW3Wfb94IXUBiMjIHIyPWv1v/AGQf2W/Hv7P37DukQfsy6f4T0/4i+L9LtNQ13xD4juJbiDdKhcMDCH8zy0cLGi4iyWc78tv7XwB8H/2ifFnwh8X/AAv/AOCgPi3wH4r0LVLBvL1PSLZrdraPaS5lV4Y4l8shZElXDIykkngr8vmHjtSw+ZVXQpU5YelU9m4uo1Xmk7OpCKi4cqeqjKXNJLpfTz63F0YV5OEYuEXa13zvo2la1vJu7Pw/0fwn4p8RWOoap4f8NahfW2k2wudVuLOzeWOyhLBBJKygiNNzKu5sDLAdTXU6n+zH+0ZovgI/FPWPgZ4stfDgt1uG1u40CdLYQsQFkMhXAQ5GG6HI55r78/4IdX+j/D7wB8a9c1HV459I0W/tZZLgSJ80MEV2zy7QxABQA5yVODgnGa+cvjz/AMFdv2rPjhNrfhldfh8PeENadoJdD0S1ijuBYk4MX2p1aTeycMwwCS2FCnbX3MOL+Kc04txeU5Xg6bpYaVPnqVKkleNSEZWjFQfv6y3dtFe19fWWZZhiMxqYfD0ouNNxvJtrRpOyVt9/LueEfDb9nn48fGK1lv8A4VfBzxL4it4G2zXOj6LNPGjehdFKg+2c1k+Pfhr8Q/hZrZ8NfEvwNq+gagF3fY9Y0+S2kK/3gsgBI9xxX7IeKdb+O/xb+APgvWv+CXvxT8CadoFhpMcFzpuowJLLCqwx+Va7tsiQuikh43VWBx83OK+Zf+CgXx0+PUP7HjfBL9uj9nG9PjGXW4ZPDfjrRjB/ZBK7mEhljLhLkoJUMAVdyMz/ACYAPz2QeKec53nFOh9WoqM6nI6XtWsTTV2nOUJxjGSVrtQbaT8jiwfEOKxWJjD2cbN2cea1SPm00k7btI+BPBPgPxt8SvEcHg/4eeEdS1zVbnP2fTtJsnuJpABkkIgJwACSegAya1vib8CPjV8Fza/8Lb+FHiHw2L3d9jfWtJlt1n2/eCF1AYjIyByMj1r9Brr4gab/AMEqf+CeXgzxF8KPB2mP8RPifbwXN/q14/2hQzQecZThsOIo5I0SNcRhnLndlt7P2Av28fE37efiHW/2O/2yPD2k+JNP8SaRNNY3cVmLV3MWHeFxEVGQoMiSIFdGjJycgp34jxE4ilhsRnODwEZ5bQlKMpOpatOMHyzqQjbl5YtOylK8lF6q+m086xrpzxVKinQg2m7+80nZyS2svN62Pzg8N+FPFPjK/fSvCHhrUNVuo7aW4kttNs3nkWGNS8khVASEVQWZugAJOBXX+D/2U/2mfiB4Vj8ceB/gD4w1fR5lZoNS0/w9cSwyqvUoyoQ4GCOM8givt7/gkD8Nv+FM/t7fF74TXN07S+H9JurGIJIsiSRR6hEodmB+9t2cY/iYHaRiuV+IH/Ba79ojU/2j4bf4fWOmaP4Is/EEdoujSack9xe2izhWaWVuVkdc8RlQmQMsQXbpxvG/FGOz+vl2QYOnVjSp06rqVKjimqkXJJRUW7y+y72VnfdW0q5rmFbGToYOlGSjGMuaTa0krpWS3fT01Pg6eCe1ne2uYXjkjYrJG6kMrA4IIPQ02vtP/guj8P8Aw74T/a203xVoyeXc+JfCsF3qcawqqtLHLJAJNw+8SkaA5HGwcnPHxZX3PC2fU+J+HsNmkIcirRUuW97PZq9lezTSdlfex62X4tY/BU8QlbmV7di94Y8P33i3xLp3hXSyv2nU76G0t9+ceZI4Rc4BOMkdAT7V+mvx4/aE+Fv/AAR68IeE/wBn34EfCjRNf8a3WiLd+IfEepW/kvMhkYeZK0f7yQySCbZGZMRIij5hivg79iEaKf2wfhn/AMJD5H2T/hNtO837Tu2Z89Nv3ec7sY7ZxnjNew/8FrP7S/4bt1X7djyv+Ef037F97/VeTz14+/5nTj8c18RxbgqHE3HOByLHXeFVKrWlC7UaklKMIqVmm1G7la9tdbnk5jShj82o4SrrT5ZTa2Ummkr27XufQC+JPhT/AMFfv2TPG2u6r8NdH8K/FTwNCt6mp2Ft5jXCrFI8Y8zb5rQyhJozGS+xgjjccCvzMr73/wCCCH2j/hb/AMQ/tez+y/8AhEIvt/mbsbvtA257Y2+b159O9fC/ir+z/wDhJ9S/snyvsv2+b7N5G7Z5e87du/5sYxjdzjrzWnAtCGR8TZvkOGb+rUXRnTi25Kn7WDcoJu7teN0r2SenW9ZRBYTH4nB078keVxW9uZar8NEe1f8ABND4PeAvjl+2b4Q8C/EqCG50kSz3s2n3AQx3z28LzJA6sRuRmQblAbcoIIwSR9d/tS/8FZPi7+yb8ctZ/Z8+G37NfhrStD8OXC2umRX1tNGbiLaCssSQNGiRsCCoAPHU54Hyd/wTL/Z58eftB/tV6Jb+CfGF54cXwwy61qHiCytxJJaxwuu1EDfIXkZggD5XBYlXClT91ftCf8FpP2efhX8XJvhzovwo1HxiNB1BrXUtejngijilRgshttysZdpBGT5YJX5SVw1fF+INCWaeIMMPDAf2lGGH96hzumqMnNtVHL4G5rRJ+9Zel/LzmDxGcqCo+3ShrC/Lyu+99rtaW3PJ/wDgqD4M8AfF39iLwF+2ZqPwns/BHjbWNQgW/sYreOOa8juI5CRKfkabAhSVGIZ1RiCACxHl3wS/4LRftBfBD4VaJ8J9F+F3ge7s9Csxa2tw+nTQO8YJILJBKke7nlgo3Hk5Ykn2j/gqVp8X7av7JHhn9tT4IfEHUbzwr4fDDUPCVxaIptWllEUs77CSs0bBUdWLrsO9GVdxk/NRVZ2CIpJJwAByTXreHnD+ScUcErB5xSVT2Ner+6nz3w75naleVpPli93pr1sdOS4LC4/KvZYmPNyzl7rv7jv8Ouui/M/XX/gnd/wUX/aF/bH8ba/J458AeE9E8I+FtJN1rOrWMdwHErZ8uMNLOVXhJHZiDgR9twNfkt/wWB+PVh+0ZqPxQ+L+jaNaWVhqE8cenR2lmsJkt45oo45pNoy8rqA7MxJy2M4AA/QH48sv/BO//gmJon7Ptk32bx58V99z4kKnEsEDohuFP+7GYbbHfdIR3r8p/wBr9zH+zh4ocDOLaH/0oiryOGuHMkWBz3PstoKlh5UqtGgo3tKFOLU6mrd+eovdfRRt1OLDYLCRwuNxlCCjBwnGFuqSd5fN7eSPg2S8RbfY8jF1/iqpNqE6t/Ds2fL/AL1U5ryZmf59yfwVQupnkjXD1/PnKfkMqxcm1b922x2P/AqzbjUHkjbemdv3WWkmkddyLyGX5v4arNNH/tDy1/irOW5cZcwNI8cn8S0jSOrnY/3v4VqGY7dpfcSqfw/dqMzZUOEbdWEtjqp+7ImaaZGZy6j/AGtlSwyOWV0+9VZd7yBH5/3anhXdl3+U/wAG2uOoexha0omjDG7D54dir92tGxby1SHZlt27zFqlZ/LCEwx+ati1jRcP/F/HXHKP8x9PhcRzcpahhTy98P8AF9+rEdttUzJuKKn3aS1R5Iw8m77/APu1fsbXpPHN8v8Adril7srnu0cQVYY2+/N8vy53VIlvtb7jP8/3mrRexRo1d/Lb+/8A7NJ/Z8K7pidy7N336x5uY7adacfiM+S1fcQ8O7d83y1XmiRV+RMH+7WnNb/KuU+WP5qrzWs32hpt+35NtEolyrlNpBuaZ32f7K/eqJm2NvL8rLT7hUkm2TcbV/76qpcEQo3kyfMvzfN92tIxlzGFTHRiLNeBWe2RGDt/E1U7ieETBLlGO35d2+oZpn85HhfLfxVD9odd2/qu7/gVdXs+b3jzamYdB9xcOsyif5F+7uqvdSOuX86o7i885fJdGqBr0RwtsfJ3fJuropx5Tz62O5pEs155UK702ruqvJfbpGd9v+z89VLrUPOP94N95WqtcTeW33Nyt/FXXGj7p4uKx32UaX2oudnZanspt+P7rf3ayY5vmZEdvm+61aemr5jff2t/DW/wnhVsR7T4Tcso33b04WtnS4XW4RJH3BlrF05Jm28fL/drpdMt3aRPnXarf8Cp8sDm5jY0uFzGPkV9r/8AjtbNjDC209m+X5vl21R02NIWLumFb+Kuk0u1hVVd4f8AcrL4Z3OeUuaNi/oP7mZI4fubPvNXX6DDbMu9LbfL/wA9N25f++a57SbVFuN8yL8v3P8AZrrdCj8uT7mX2bm2pWhidT4f0+8uGKPNuVolZdq7du2uk0uFJGWR0VkZd0vz7a53RZkRNjvMszMvlLu+Xay/d/2a6OwmhjZfOjX7vybU+61VH3fhDl5QGy3j/hG35khWql5D51wdm1v7rNV6S6m8tZpJl3tu3qyVTjuU3Lc2bsys3ySMny1fuSNKdTlK8kMduypv+8v+saqdxvZvJ2ZRV3eZ/C1W/tJf/Rkhx/tN826qcjLJMUlO2Nfm3fd+asZS+zE9zAynKUTPvf36+SkOX/56bvu1iapbpNsSF1A+b7qVt3kKRxpNs+bft21laq00a+TbJ8rbtn8VZR9pHY+xwdPmjqchqywxs0yfK6/w/wANchrC7ZiXTP3vu/w12WrWb7v3zqv95VX+GuZ8QWoVW8kLsZ/nauWpL+Y92jTlLU7e31BJIf3L/NGu5I2q9a6gJpjIiMg+X7r1xseoRxoqedtH3XaOtGz1S2h2o03G/d977tedHnifASlA7iGbdGX38bdrU+2ukj3cMrM/zN/Dtrm4dY/c/Nxu+6y/ebbVttUhkt38n94zJ91XrzazqrRHTTqU4yN+HULaPc8Lsksnyoyr8v8A31TI55re3XY6nb8u5n+9WNb3jiNoNi7Vfd81XIrp5IykyLsZP/Hv4a8mu5KpyqR6+Dq88byNmHZNGs1ymGV9u1vutT7q8FvCwuXX5l2qu7btrNjukMKo7fPH8yf3V/hqS1vIL6x3/u5fMfci/wB3bXHUlHnPZpy5oDrqTzI1k2b2j/vJ/DUV5aw27L533m+ZNvzVZk/0hlh+Vn2bdy/Lu/3qSRbby9+9Qrffb+7XVQ1mOp8JiapNc+W6WzruX5kVovu/7K1jXkLyZd/mMe1d2zaqtXQ6g0LW7J/Av31X5WrE1C6RQvztv2/73y19hl3wHFUl7vMZsi/aJntbZMt/D8nzNT4YfMVUebDbPlZU3fNUbRfM7pM3y/c21dh2QsPOdkf+6qV9LT+A8DFVpx+IrrbutuJndSV/9BqnqGxV855vODJ91V+bdWpIvlKnkw7F2t82/wC9/vVmalHJ5jQyOu1fvqv3lrq5zxpfvJlKaZI1RHRlbbt3b6YzIsjw+crbk3bmpzbIYWTfGq7/AJWb+H/ZqhJBNt3ojfdrCtU5YHXSo8vuotWcwkkCO/ys23atbVmqRt+8fcNnzrXPwxuqxI/9+ta1kRZgjoyL/eb5vlr53GVF8UT1MPTf/bpu6e3lqm+44X/lntrThkfzP9cq7f4mb7v+7WPbzDyVPnKrbv4v7tWvtGxvnmyknP8Atbf9mvAxFTmPao06UY2NBv30bI7r97/eanzX00kzwokap8rfvPm+XbWV5w+xjyZmR/N2qzL/AA/7taC3jrblEdXdkVd0ledze6dHs/dLlvJuUQ/K7fdX5KsW1ws0ivcvnzIti/3l21Rt1SS4+5t2v8u35W3bfvVow2v7x53ufk+VXZfu0/iOOUZx940tNjdrdYN6nb83zVY2zR3IkR2Xc33V/i3VXt/JiXyfJVH3K25n/wDZasrav5n7mRt7I3y0SlL5GMYe0nK4+K38tnh37tr7d0jbmVqFWCSNZppst975U+VqmUpKqvMmz5V3Kv8AFUbW94rM72ao33/mf71ZyhGOw7S5eUga5hmtXuXhZVVN3y/eqz9lhZT+5kD7Pu/xU6OSY70dMfKvyqnzNTLhLm3kSbZt3bf3ivuatIx55cpy1o+7qYmoSWelw70Rssnz7k3bWrntQH2yRv8ARm3L/E33WWul1+N7i4N5DtdVfa/z1zWoRwx7oV+V9n3Wr08PT5o6RPCxEuaXumDJGjTP5afd+42yq81n++aaHa/9+P8Ai/3q1rrZJl0eP7nzMq1SVXhZ/n+b7uP4lr1OX7J59SRB5c0nyQ/39svmJU3lia1DvCzpu/hWnrG7Y8sbmX7/APtVZtYvtE/kzXjAL/d+bb/wGj2ful0Zc0Cp5Y2/voVO75WVvl2/7tV2sUjjbejPub/e3VtSKkzB4U3qrbdrfxNVeOx/el5LZUP3nkjeol7p1x+Io6fZ/eQw87fkVv4auwR+VG6Sxrhmot5k+5nH+0v+992o1me3byfmfy23fN/drCMpR+E6vspMst5zbpk+ZF+/t+WrOn3UNvHsR8Kv/LOT+Gs2GSa5kZ3TLs3yfP8AL/3zVea98lvOnmwv3fmrro1JHJUj/Kbcl9DGodLn/WL8ysvzf99Uv26FkHyRna/z7n2/LWPb3ieSqeYxT/ZpJ72OOTej4/vq1dkZe8eZW90172eGe4RAi/d/hf8A9Cqx532fbD2/gZV3VjrdQsrunySK33dn3f8Adqb7T9oWJoblVf8A2q6acub4jil7sjZ+1LuTY+7anzts+7/s1t6LFtl3pMuJF+VWi+Zv71c9Yq8ypDNNsSR/8tXYeH9N85vJRFX51Zmkro5faE85o6fpT3W3f13/ACRsnyr/AL1bsPh3czMjq80iK3mR/d+X+7Uul6ftBezRQ+z+J/4q6O10b7RGEQbWVtm1v4quMeWPvC5omFp+h/Z1abyYyrJtfa+7bT5PDkKxF/tK7F+b93/C1dXa6DulXybNfN+9tZPlqxZ6L5KvClmz7n2/Kn8VRyw+IfOecat4dmt5P3yM67dzR+V95v8AerEv9FtrcD5edjMrN91f9mvUdY8PpLM6P52/+BlT+KsXUtFmFn8kKsivu27aOXmCMjzDUNJeH/SXSNk2f8s/4d396sO68P3jLLDA7OrJuTdXp974Z+0RtBMjfvH3vuT5VrOuPC9+qvsRSfvP/srXLKjy6le1PMJtBRVl85Gfb8yMsXzVNY6ait/qWxH823b81dxeeF/LkEyJI67/AOH+KiHwztVvJhkUSbt7N95VrzMZh4VNGdtHESOc0/TUa62PCuzbteORPvVvx+HXWEJ9maV9jbl/9lq1b6T9kUpc2y7vuOuz5l/2qtWbOszQyPJhm2/NF822vlsVgYxq3jE+iweK93lZSh0tJIR5O5N3/Lu33lqa30vcslh+8VNq7W3fxVanjtkZZv7vzbv7rVYsy/lbPJZnVfk/u/8AAqzjh4yp/CepLGSjLkiQ2Okv5MkLou/YuyON9vzVv2Ni7RxzJuyzqssap8sdVYVeS3ihS3b93t/eVuaXawyRpFMmBvVv+BV7uCw1tTzcViOhp6ToYZhDNDtaH5vl/irWs9JhuIzDC7I7L/wKo9LmTef3zeVu2+YqfNW/pqvHPsTblvldpF+8v96vpMPR948CtW5jMOg/6O/2Z/461rPR3dVjm3NtXc7f3q1LWz+XzE2/vPueZ92tSx0lLyZJ5o9g+83l/wAVetGj2PLqVDPsdBhlVZnmb5m3Mq/Lt/2a2LPwrDdI5mh3S7N2373/AHzW/o/hlGjEJX5Gf/WL81dLpfhW/t8eXMv+xJGn8NdEqPumEqxw8Ph1J49727PtX5fl+VaLzw/NcWoRN21olTbt+aSvQ4fDKJGqbGY72+9/DWfdaKi2cMN1uaNV/wB2uSVMcah5dc+GXhbf5PlNJ8qK33ttctrmi+TdSpNbbdqV6tr2jfvpU+Vvn+XzPl21xviS18mR08mRVkfbu37ty1w1qJ1063KeWeINMhb5Hdk3PuRW+61crqlvNHv2bW2vu+VflX+H5a9H17T4bht4tt7Rv/F/yzX/AGa5HWLGOEi53rt+bev92vNqUaXLY9ClWv8AaPPtWs3mnEkz/wCrXbE396uc1Rkjj+Sbd/D5jJ8zf7tdv4iExh3/AMbL93eu3bXE6pHNHDN5L7VV93y/w15dSjL7MT0qOI0Oe1HUI5pNiOzJs2tI33aozSQ+Y0O+R1z91flqXUpI5LgQ+Szovzbdnyt/tVTuNQjmk2JJhNvzf3VatoUugSrRkJdXELIjzJIny7Nyv8yrVG4mdV2FG+V/ut/47U9w7xxjeik/e2r/AHaq+dumW2SPb8ufMrrjHlOSpLm+Ijk2LDv2Y/56tWfNDbQtlIdrN/FVq6Z5vkSZkT+Flpqqkiok3Cr8qybN1dHLzR5jn5v5itHbwrIjo+7bU9jZvuKIkm9m2r/C1N3JC290Zmb5f31XrOGbyW2Ox3Pu3Uvdpl048xYs/JWZIZ9vyrt+b+9XT6PYxyzt5KM3lqqqzfdrAsbEY8+a23Irfd3/ADV2Xh87Y0dEyfu7V+8tZ81ocp1fYLdjorxyRLDMsqr95ZP4latvT9LgjUeciu0n39vy7as6Lp9s6p8kbSt8vyo25f8Aere03Rd7Dem9o1/u/Ltq6fvSMKlP+UpWen289mqQ9W+dFj+8v+9X0F/wTJsbWw/bP+G5uo5Gjfxzpu0xsAS/nDackHgMVyO4z0615FHY2f2jYlsqPu3ytH937v3Vr2D9inxX4U+HP7Snw58a+MNbj07R9I8WWN5qF9cKxWCFJ1dmYKCeAOwr9O8Msu+vZri6ibvSw1eSSV+ZuDp2/wDJ7/K3U9bh/De1xdR3+CnN+t1y/qfpD+3z/wAEovEX7XP7QF38ZfhV8YtEsrq4gtrTxHpWro7G0kihQIyNCGOWi8s+W6rjhgxDgL5P+3F8Tvgd+x3+xbaf8E7vgp8Q38R+Iby4Evi3VdPlj8uPE/mTpPsdvKkeRFUQAkrGnztyN/zV/wAFWv2kvDfjf9uTxb4n+CPxCs9b0ie1soU1HRL52hlkhtY45AHUhZAGVgGQspHIJr5bvPiRq0JdhBbMQu7mN8n9a+l4W4gyWWAy2GeZnOpRwqpzhQVDl5akY+6pzTbmqbuo6K9k3c68FnOXQpUI4zEuUadmoKFrSS0u1uo9D9YPg/4i+GH/AAU+/Yr8N/s2XPxjk8KfFPwNFDFpz6jcgNqJiiZFZEVw1xC8KgOV+eJ0DFWGPMx0/wCCdvwF/Y8+F/iL4if8FCfjq2vvcabLD4f8MeHNanglmk4HmQCR0e5m3MuEKeUnLSblPy/lSvxn1+yuEuEsYISvzRyKXDA+ow3FVtV/aH8XahcPLqTW900Q2LLPJK+T6Alulems54cw2JqUMuzirQwdSo6jpRoe/Ft80o063xQjJ9EnbVJ6u9f25lFKo4UcVOFKT5nFQ1V3dqMt0n6aH6e/8Er/ABJ4P0j9lf8AaVtbnxDZWCz+GS1nBqWpQpL5Rtb2JS2SufnliTdgKXcAckCvg61a2W5ja9jkeESAypE4VmXPIBIIBx0JB+hrx2//AGhvGFpvSHQdPZlOCSzgA/8AfVZN7+1N40tdqHw5pqyE8oyyED8Q1fYZXx/wLlGcY/H/AFmcnipQlb2cly8lNQte7ve176dvM9TC8U8P0MVWre0k/aNO3K9LJL5n7NS/8E0fh38aND8N/F//AIJn/tHweG4n0a3XW7O48SXLzrPsDeZLJAWeGc5xJCVVQw+UIPlrov24vEOm/AH/AIJv3X7OH7TfxvsPiL8R766iGnL9t3Xlu5uPNSZtxMxSJFcebIBv3BOAcV+Gqftr/FHRLiSXRdK06BsYZoZJ0bHvtkFUpf22PiLcTm5v/D+ku0nMkrecx3e5MnNfBLP+GcRmOGqZhnFStRw9RVIJ4a1ZuLvGMq9+ZpXs9E2tDzY5rldXEU/bYqU4wkpK9P3tNk572P22+F198Hf+CqX7FPhn9mjXPiknh34peA44o9LbWJEZr9o4WQNGm8NcRPCoDlRvidAxDDHmbX7OP7Jfwr/4JKprH7T/AO1R8ZdK1HXV0ua08OaBobYknVinmeQsxR7iZvlTG1UjUszMQcp+Gdj+2l8QkkWaHw7pUc0Q37oxMNp9Qd/Fav8Aw2L8S9ckW41zTbCZwuC8sk0hA9AS9ZYziPg3kr5fh83q0surzc50FQvL3nzThCrvGEn05XZXXV36pYnL5KdGniZRoTd3Dk11d2lLon6H68f8EfvjNbeOv24vif8AFrx/4ktbKfxD4cvr921K/jQ4N5FOygsRlY4kYkgYVI8nAFfDskkJ+KDSi6h8v+3yfO89fL2+f97fnbtxzuzjHOa+c9P/AGofFl118PWK4OGyJF/9mq7B+0V4keIzNpumlduV2JIdxzjH3q+py7xP8NMqz3F46liZ2r06VNQ9lK0FSUoqz63UtrK1utz3MLi8tp4qpXpzdpqKtbblTX6n6g/8F3PEPh7xH+0d4QuvD3iCwv418Cwl2sryOXaHuJpUJ2k4DRujqTwysCMivh6vI2/aF8UAZbRLA/u933n6f99VHcftGeI0fZFpOncfeLh+P/Hq34U8XPDfhfh7D5VHFVKipR5eb2UlfVu9tbb92b5fjMBl+Bhh1NvlVr2se3eF/EF94T8S6d4q0wKbnTL6G7tw5IG+Nw65wQcZA6EH3r9NPj5+z38L/wDgsH4P8J/tB/AT4raFoPja20RbTxB4b1S5814kEjHy5RHmSMxyGbbIYyJUZT8oAr8V5P2k/FKR5/sbTA2cbT5n/wAVUcX7VXj/AEqX7dpunWELp92WF5VZfxD15vE/ilwDneLw2PwGYVMPiqHMoT9i5xcZq0oSg7KSdk97pq61McfXwuLlCvRquFSF7PlurPdNdUfs6nhn4Vf8Egv2S/G+iax8SdI8U/FTxzCtkmmafc+WbdWikSM+Xu81YYt80hlITexVBtODXzl/wTN/Yb+DH7Z2s+J7X4sfFy60ZtEtI3s9F0ieGK8uQ2d1yWmR18mPaFYKpOXGWQY3fm/q37XPj0SSXdxoumyuV3tJKspZz9S9Yl5+2l8SLSISxeE9GbIycCXj/wAfrjwXHnCGFynGKlm9VY7FyjKeI9hquWyUY072UVFOKV76t32txRxGGoYeqvrElVqNNz5e2yS2slp+p+sP/BOP4xfCD9ir9vHxL4J8VfEjS9R8MahFdeH7XxvGWS1JWdHhnJyVWNzGFZssqkht+wFj3fxC/wCCHPi34g+Mb7xz+z/+0B4S1Dwnq91Jd6XNfSys8ccjlhGJIFkSYKCAJARu67RX4r3n7cvxHtpfLHhHRf8AgSTcf+RKZZ/8FGPjVpQeystG063iBJ2wT3KKx+glrXH8c8OvOHmuUZvOjXqU4Qq82H9pGpyX5Zct48stX8Lt5IxxOY4WGJeIw+JcJtJSvDmTts7aWfofuD+1Jc/A79gr/gnXqf7E2g/FXTPF/jTxPqm/VoLSUbrZzLFLLM8cbsYFVIYkRXbLsd20jeB83/8ABLL4HeFfjd+1zosfjjWtOttK8NRPrdzbX15HG161vhkiRX/1mGxI4wQI4nzgV+X8/wDwUB+KCF3l8HaFvByQVnyT/wB/Kgk/4KE/FSIgjwPoQB77Z/8A45XZlvGXBmX8N43AU8yqvEYpznUrui789RKLlGCaUUkkkk9O5lSznKMNgqtH28ueo23Pl6vS6XTTbU/Sz/gop+0vL+1L+1Nr/jewvfN0PTZP7K8OBH3IbOFmAkBHXzHLyZ9HA7V8rftHeDPEXxC+CmveDvCdmtxqF9BGttC0yxhiJkY/MxAHCnrXzpc/8FFfijChKeCvD5b+FSk/P/kSq7f8FHfi4kYY+A/Dxbb8wCz8H0/1lfT4fxB8OMPw6smpVJxoqn7LSDvyuPK3e2/W7T11ZvLiXhuGAeD5pKHLy6Rd7NW+8464/YW/aYeTKeBrYj/sMW3/AMXUD/sG/tNlsR+CLcBVwv8AxObb/wCLr0zRv28vjjrkipZ/DvQDvxtGyfv/ANtK9e+Gfi39sH4lzNaaP8G9PkmePfZRQ2VyxuR6r8/T3r88lgvByK1xOI+5f/Kz4udPgKE9a1W/ov8A5E+Um/YE/abBLjwhbkkcj+17br/38qAf8E//ANpxl2N4HteDkE6xbf8Axyv1T/Zj/Yr/AGkfiLq9sv7St/4d+G+nXC5828hmkuB6fuQ5YfjivS9Y/wCCedsnjWx0Lwp8f7LVNOmvvKvNRTw1Mojizjco87JP4Vj9W8F3L/e8R9y/+VlqPAkNVUq/d/8Aan4uz/8ABP8A/ajkO7/hBbUt6nWrb/45UR/4J9/tUHA/4Qe1Azn/AJDNr/8AHK/W74l/8E9/2qvB2vX1ppPi3wQbRJm+wLqXmRXEkXUOyedx8vNdBoH7FvhnSPDMeo/Ez9oa3k1JlDSWPhjwZd3EaZGdvms+3dWc8J4KL4sXifuX/wArLjPgWW1Wr93/ANqfjmn/AAT+/amU7f8AhBbXnuNZtcD8PMqxD+wD+06pBk8EW3y9P+Jzbf8AxdfqlqX7Pn9sytD4A8WXYbcRF/bHh9l8znAGEm+U/XNeYfHD9n79v74T2suu6N8MvDmsaXH9yZEnjkk4yPlMny/jURwHgpU2xeJ+5f8Ays6IYjginL+NUXy/+1Pg22/YQ/aPTa8nge2DL/1GLb/4ur8X7Ef7RuVVvBlsu1cbv7Wt/wD4uvSNf/bJ/aE8K6pJpOv/AA20GCaIYkj2T7g393/WVn/8N7/F0bd3gfQVz97Mc/H/AJErmq5d4Hw0lisV9y/+VnsYarwvL+HVn/X/AG6cxbfsYftBwqEfwtbnnOf7Ug4/8fq7bfse/H22gyvhe3MpbJb+0YP/AIuuli/bu+JUi7h4O0Tn7o2Tf/HKng/bl+I0/wAq+EtEB91m/wDjlck8v8CeuLxX3L/5UerTnkmnLOX9fI5Zv2PvjyzAP4at3XdnH9owc/X56mX9kD41JEdnhCAOPuf8TKDGPT79dOv7cHxCYKF8K6KWLYZQs3H/AI/Uq/ts/EGSMtH4V0cnbkKY5v8A4usnl/gNHfF4r7l/8qOh4jKIvWcv6+Rx0n7H3xzkkMknhOA+w1OD/wCLqGX9jn48Stz4UgUe2pwH+b12LftwfEeMEv4Q0bAOGfbNj/0Oobj9uz4gwnavhTRM7sAFZv8A4ur/ALO8CP8AoLxX3L/5UR7fJd+eX9fI4ib9iz4/lCq+FIGBOSv9qQf/ABdULv8AYf8A2h5590fg+JU9P7Xt/wD4uu/uv28/iZbyso8H6GVX+LZN/wDHKoz/APBQj4oRS+WPBWhd/mMc+OP+2lbU8B4Fx0WLxX3L/wCVGNWtkUvinL+vkcHP+wx+0lv3ReCbYn+8NXth/wCz1Rf9gz9pl02f8IPb8nLf8Tm2/wDjld1ef8FHvivaKWPgjw6SBnG2fp/38qg//BTX4truK+A/Dhx0AS45/wDItdEMu8EJaLFYr7l/8rPPqVOGoy96pP7v+AcZL+wV+1KwwvgW3Pu2tWuf/RlV5P8Agn9+1NI5c+Bbfn/qN2v/AMcrtJ/+CoHxbjTcngPw3nGcGO4/+O1UP/BU74yAE/8ACv8Awxz935bjn/yLWqy/wStpisT9y/8AlZzyqcKy3q1Pu/8AtTkT/wAE+/2qdpT/AIQC1I/7Ddr/APHKhf8A4J6ftYOdqeBbNF2441q1/wDjldif+Cqfxm8woPh74Y4Gc7bj/wCO01f+Cq3xjZcjwB4XB90uf/jtbRwPgt0xWJ+5f/KzjnDg6W9Wp93/ANqcrD/wT4/arUqx8C2ile/9s2v/AMcq7L+wp+0vo2nS6heeBIZI7eJpJEh1S3diAMnCh8seOg5PaultP+CpfxiuQCfh94aXPqlx/wDHa+gP2Pf2k/Ff7Rena7d+KdD06yfSprdIl08SAN5gkJ3b2b+4OnrXrZNwp4T8RZhDL8FicQ6s72vypaJye9Psi8FlXCeY4lYehVqczva9uiv/ACnw7pEa7wrBwScEEfMK6zS7d1kTfD8zfM237tafxtso7j49eLHUGMr4kuug+9+8ak0O3n3L/dr8TzHB/UcZVw978kpRvtflbV7dL2PiMRSlQrzp3vytr7nY1tHt/MZYUh+81dLY2aSTGGNMrH833fvf7NZej27j5H+8r/LtrprfT5Fj3un+0is23dXFzcpzylyF3SdN8uTyZodzMm3cvy7a3dLidmSF3bb/AHv71QWMMMkLWz2zFP4V+9WxZ2/8b220fdX+61Pm5iJR5vhNGyEkKxQ7N4/hkb+Jq3tL1Dy02zTZ+Tcqqm75qw7dZsfaYN0R3bkb7qx/7K1qWFtbW9ujTQ+Tufb8yfd/2quBMi1czQqsWxFT5d0qr/eqnqFwkm+HYw/uKtLPdTW7NZzeTMsbbl+X5apXl1Myr/q96tu20c3KXEkWTbNsRG3qm1lrPkmkupvkmbH93Z/tUyS4SPMzuwRn+9/7NTPtUN0okeZok+ZYpFT5d1TKXKe3l0e4XUkMkj3Oze8fyorJu21j6zJtmT5GVmdtqxt8taNxIkluiO+yTb8jbvlb/ZrHupEkmWG5f5fvbv4lauSUub7R93gXyqKaMPUFSMtB5yszfNtX+GuR1mP9ykcLqy72+X+9XXa03lwvMnKsv/Aq5TXIdzJ5aNt27kZflrnlLm9496lGMdeYry3CKyIiL+8+V6t2t9tkXznVF2fdb+KsRrzayPvzt/vJVeTUt0iyPwuz/Vt/FXNHnPzCVTmO60XWIWX9/Nxub5f4lrW026trdt7uzbvm+avO9J1ZIVRN7M33vmrXXXnXP+krt+75f96vGxPtfe7G1OXL70jtlvkurUu7thv4l/iX/wBlp39qP5aCzhZ0+ZmZZfmauQHiR0hZEk3bflfdV+z1jzIza+dsVXVt1eBUouU+ZHtYWXN9o62x1iS2dIX3Z37F+Xc21vmq41x5kZ+7v+9u+7XN299JdFB521l+/wDP/DWhZyIrFH8xWX5otyfeqKFGfOe5TqezjyyNrzHkmebyWMm7au1vl/3qfdXEMe6aa5VW2fLt+7uqpb3EFwqf8sw3yvN5v3aJLeOZUTf/AAfekT73+7Xt4OnzfEZYip/LIjuNkm1E4eRfvL8tZtxb3klx878L8jbfl21uLB9oX/UtujqO6tY7yHY4+6n3v7y19Pg17P3TzK2IjH3TCk0/zI1dONvzOzP/AA0tvsa8f52ZpPuN97/vmr0luhkCJCwib5fm+792nx2m5UuoU2bovlXf/FXv05R6ni1qntJycivqFvCsYeGHemzdu37ay7qQzTP5iMrf3VTbV+8t33eXcjftTcm5/u1l3TS+dve52nZt3N92t5S5feOen/dKF1CkanzpmUK25F27laqkzbcuH+ZvlZf7tas1v5kcfnTN5n3VaqElu/2xt6bH/wCei1wYip7p6NOMiCNXm2P+7T+5Vu385VD72eZm2/eqNYPMmTyX/dKu5/k+81W4YMZTzmb5vkZa+axlT3rnsYWPuk9nL9ouJXfh97fL/DVuG8eRnS5T5V+42z+GqqshUon36tL94IEYjZ8v8VeZUfN7x6dGjy+8WY2tppN/nbSqbX3JViCbzmX7Z95flXc/y7arR280LJs+ceVudf4t1SW6+Yr/ALlh/Du+98tc/uSNKnuwNe1+03lwk0D43fK/+1V+PyVmhtprlQVdml3J96sSz3syJ+8zH8z/AC/L/u1s6XI80x/0be0f3amVP3tDjlU5o6mxbh2bZ9pVCv8Ayz2feWtK1VP9dCiurfNuZvmWsuxW8YI7vx833fvVpx7LiHzoUjjPlL/Dt+7XNUjOUeUI8kpFhreby2ms0VnX725PlVaS3tPMkbzn+78rfxbv9qmwu8kPkO8jj7rtsqWOPdGuyZdu7aiqm3atTGE4mcpR5vd2EWNFkREhy0j7Hbzd3+7TZoXVf9TtLfLu/u1IsaW+XQ/LI/3VqteX0MzOiI0bx/8AAvlrrpVJc+iOKt70TA1CPdJ8+52+ZUXftrDvpt2XhgXP8asnzLXQ6hIkLLN5zM8fzbv4vmrD1CGb7Q/nOxRk3Oy/LXv4X3TwcRExbxUmV4RJ+6X5vMb+GoL6zhjVHfzHH3kXb/FWhND5MbSvtZN/3W/iqC8V2kLu7BWT5o1bdXdGPtDhqRjGPvGck0Nu0nzsjt/Ez7qs2Nxc3ipvRVaFOdv8X+9TGjTzD8nH8asm7dVm1VF2JbeW7N/d/irSUfsnNHmj70S4stzBGU2b9yMys3y7ao3Vwlzs+Rl/vf8A2VXbiSe1ZrZEU7l/4D/u1VZtyn59rfeRf73+zXPKnE7qdScdSOzTdA7ui7t21G/vVFbyQ26ed8o+8qKz1PHZurffVfM+ZNr/AHaq3Fq7Qt523fv/ANXt27q4pHdGRG15tUzJbSD+8v3dv+1urOuZvOZtkzbmfc67d1Xmt08n99D95Plj3/erPuI3Vt6PtXft21dP3feRnW94qSag6rJ5Pmf3U+bbVyxvPtiK+/8A1a/3N1Zl1au0i+dHvVv4m+6rVoaRbvax+T5LfL8u7furvpyjI8vEe6XVkubi4/0lF2/KyNH97dWvp9i8nlZ2lf7rL826q+l2PmN86MWX5UVf4Wrdt7V2u4vvH/pmq/xf7VdlPc8upI0dJ011VZkdZG/uyf8Astd/4X0GSaFIXhZFuP8AVbn+7/tNXP8AhbQ4VkU78fJuWRmX71dz4b01G8nZdRy+Wm5Fb7q/7Nd0Y+4ZSlym74b0NI1+4uV+V2X5t1dFY6KkcnnWb53PuRm+Vv8AgP8AepfD9snyzJCy+Sm3a33m3fe211+l6fZria2h+ZV3Rfxf71ax/vGEqhj2ehvGyTfvGZfv7m2/LVqPw88du23d8rs3mRvXT2OlpMo3w71k+Xbv+arlroX2e3fenz7/AOJPlqfZxkL2hwWoeF9sweG8b5tzs0jfxMtYNxob2qr5af6v7i7t26vS9S8PzSTfPD8rbVesrUPD/l/vnto3WP7jKnzbafLKKI+sc3uo83utB8uFv3O+L5v3cn3l3f3aoXGhwzbvkyq/wyJ97/er0W80d5IQkyKrKjfeT/vlayL7w68cYm3rvVFbatTKnAftPe5UefXWh+cqvDIyIq/3aqX2ipNH+5fcy/fXdXa3Wlv5Mlr+8VvvfN91ayLiz8uGSGz3M/8AeZf4f71ediKZ3UZHKXUPkhofJbdJ/rW/5aN/u1BPZvHIpmdkkjT5P4W21tTaajYvH+V9+0LJ8u6ql8jtumf5Tv2LtfcteNiKMuX3T28PU5Sh/ZsMkbI824SJ/C3ysy0iL9laK2hjYeZ827zdq1JqH2do/kh2NI251X7tCXyNJslH/XJW/urWNLD8252e2/lLtvZvuRH+VV+Vfn+atuz85bjZDwY1+81YulzQSKqTncPveZu3fd/vVoabeOrFJpmZWdfKZv4t1ephafu2OLEVPaHWaO0MCrsdWeT5nVf/AEKuh0/943n3U/mn+Bdv3VrldMh/fB4dyOv3F/vLXT6OEaOKa83b2b7q/d/3a9mlGx5tSUuY6TS7ePy0m2SYX5ol27l/75rttL0lIVDzQfP95F/9lrA8O2/l4+95TN92u90Wxm8lJnttz/e2yfeVa9aMuWB51SXLL4jR0HRofs6BIdu5NzN/drqNL8O7oY32bUb5UaodHs/Ot1mmtW2RtsRY/wCKujhh+VExho33bmX5v+BU5e8cHtvf94zTpP2fe9m8OPKZdzfxVmaho9tGPtSIu1f4fvV1lxFDHjft/eJuST+GsHXLdJIW8lNyxy7mWFtv3v4q5qkf5TWMjgvElj51zs+zM4VF+9/erhPEFq8jfcw8jsjbvlaNq9K8RWs1rJL+5+dXVnbd/DXE+KbV5pHh3szSJu27K5KkeY7KdTmPMtYsZpVljdFRo/k/2f8AvquJ8QaT8rJM/mov32/hr0zW7OG3m2b/AJ2RmZW/u1xHia1+0M/nTNsVNjL/AMs2X+8rVxVKZ2U582p5v4i0+2mt3RLbDr9z+Fq4DxNZ3yyJ/q8/xrv/APHq9P1i1eSdHh+YL8kUjV534ou386a5ddhk+VFjX/x6uSVPlOunW7nA6o0ylk8lt8aN81ZscsM0mxPuM+19y/MzVq6tHMt9Md/y7NyNWHJIm7Y42H7zLv8Au1hyxOzm5tIkrXf2VsoMov8ADsqlcTG3b98m5ZP4anaZGU+T/F9zd96q9xcbW+R1I27WZV+b/drWMeb3iZSj9oiMkMm5E6/dVViqPzizSpM6jb91Y/ur/wDZUrSPGrO8O2X+9v2/LVdpIdzfPv2/7FXy8pzc0Ze6WRJC2zzplf8AhbzFrRtWDQu+xQWVdm2sqxXy9ieT8n3trfNuq5Gybi6bdjJ91f4aipHqbUeeO5uae3lzFJk2tt/iTdtrrNDk8mOLf5Zfb97/AOxritPuv9I2SOrfL8+7+KtjTdSkVfMm2p83/jtc8o8p2xl9k9T8N3kMcbPNMuPu/L8rf7NdRot5MtqLb5VO355F+7Xmvh/VkCo+/fHH/qvMf71dPpevPI6Inlptf5938VVR90KkjtY5kh2PDCrlV2ytGnzL/eq7BKzab5u3adjHAHTrXNLqCSRIjzM0i/N8rfKv/Aa39Om8zQxNKCP3Tbv1r9u8FnfOMf8A9g1T/wBKge7wvKMsXWt/z7l+aOVulhWQ/Y0Uru3bvutWJq0m5nhSbcv95v4q19WmhZUf7SybflVttZF4okj3oV/d/Kqs33q/KoysfB1InP30n2e8TyfkZv733ayppIbiR0eFVDPuZf71bGuKlw7onKKu6KSNN3/Aawry3TzA6W2z+Hdu/vV2xlGRxy934jJ1eJPOZ/M/vbq57VG+/wCZwPK+7t/irodQhSFpk+V/n+9XN3yzSRzP8u9m+ZVrKUvcKp83OYOoqjRrMg3t/Dt/u1QRFaP5E+Vv4mq7cRwsrQzQsu3/AGtqrVK9aGNQkbqqL8u3+GuCt/Kjup8nOPtf3Mm5/wC/tX/arTt714Y/73zfN/s1kNIkduknQL/D/dqSO68uQ735/wBlK82pThserh6h1Gm6lCyb/Obb/data31CGaHY02U3/ulj+VmrkrG8TaqTfIf9/wC9Vyz1HzpvOm+T+GKvNqYePQ9jD4iXwnUrIfJeRJlyqbH8ylW68tQlyilmT/SFWsKTVpvnfzsbfufxVOkzt86fLuT7zfe3VzSp8p0xrc0uUtXN0mF82HC7/k2/w1FNLeSS7IYVwqMvzOq7v+A0xZvmRPtSs/3tv8NR+TdSM291+b5kVfutUcsfiOiNSXwxM7VIQyrM6MpZ/wDe2/7NYeoafCrfO+FrpLi3eP8A5ed396sqe3Rpmh8ldsny7mrqp+7A563J9o5u+snjU79q7fu1n3Fqkn91j/eat28jtmVnR2Yfd/4FVBrEyTP/AH9v8SfLXpYfmlqeTiDGmsYXDbnZtvy1nXVq43b/ALq/d3V0U1n5cf3Gb/d/irS0P4X+IfF2oW1tpumzP9o/1SrFur0KfkeLiPdicJDod5qF8LazhkZ5H2osabq+rf2Bf+CW/wAWv2vvG0Og6bYSQ2ULq2pak1qzeTH9792v8Un+zX03/wAE3P8AgjzefFjxVpU3jOwupHaf9/b+Q0EUK/e3SSN/eX+7X7b/AA5/Z58GfCfQU+GPwQsNL8KadDYLZJdabb/6Szf8tJt395v71dNTFRpw0PErSnUl/dPze+B//BJ34D/B3VLZNY8NX2o6xDOqabot1YfabmZl+80kcfyx/wDAq+uLXwD4k+GetSX7+NrHwfdw6WsVloui6XDJdLGq7lVY41ZlZmr1T4qeF4f2bvBaW3gDWLfQra+vP+Ko8d65ceZcxx/xLBu+ZpGrxyL9v/4V6D4T8SQ/s2eEJ38QWUTLB4u8S6Zu+0bfvTbfvMtcVTFc0uVl08Py+8jl/CvxQT4P3WpeNvj98PLzVZdS+bTdS8cXq2zyNu+6sP3m/wC+a7vwX/wU0/4J56L4LW21o6amszMy3Gm6Ho0ki28i/wALSV8ReLfhh8Vv2n/G0Xj74reONQ8Q6je27NPqk1vJtjjZvlWGNflVf92qmufsSv8ABbxlpGt23wc8VeKtLjt1nnt5L/7D9quN33d393/0KudwqSl7j5TROlT3PsDxR/wUN+BV3rNr4nufiF4JfTVLQweHb7SVRo23fK0tzKvzVwvxS+O3iTXJpofCvjnwjqOkattli03Q2WRbfd/CzLXjPxA8Fp8XPDb+FdY/Y80Hw3bSSx7bq68Q/afL/wBn7v3q1/Cv7GPxI8K/Dyz13QYfBdtZ2M7eba6PK3m+X/DuasvelFe8TKMPiZufDHRf2jtH1j/hLbbwTp99Asv+i3FrKrK393crfxV3mg/Ej4naa9zqvxX/AGY9U8R2l15jT6hH5byeX/eVV+XateP6X+0NrHw/aXwr4z1WPFvLuijtZdyrtr3X4A/tufBzXri2sIdVvEC/8fkMkXlrWftlEJUZSjFxPMvit/wT1/YA/buhv5ktLjwl4kvLNks75bVoJ7ebb8vmf8Cr8yPj9/wSv/a3/Zn8ZXPhXVfhvJ4q0ppW/s7xBp8EjR3EK/ekZtvy1+6/iz4mfsr/ABC1pPCuj+MNF0zXI3826Zv3DR/wruk+6zLXZ/Dv4Y/Ejwr4fubzQPj9Z+IIfK22FveIsvmL/d+b5dtdUcTGpG03dDo1q+Hn7p/Mp44+Bz6LpqarZ21xb3McrRXum3jqrx7V+8q/e21wEdnDG3yOr1/Rn+3N+x78Fvjx4Nurz4i/CjSdD8QzQMsHibQUji3Mq/dZV+81fjH+2N+xzpvwR157/wAH+JI9StI7PzZbdl2zxt/FuVayrU6Uo80GfQZfnHNPkmfOTWfQI64X7+1fmpY7WRVkDo3zNt/3qteWkjLsttv8T7qmhs3j2zfKSv8ADXm/D7p7/N7Qz5I3WMJ5PzN/eWq7Wf7nZ5C5V/vba12jmRRNH93fVC+V45nm2b93+d1bRjORn7SEdjEvI3be7w/d/i3ferH1BflE3ksvybdtb2oRpIvlx8Lv27t1YeoRzRspPI/3q6acffOKtWnuc5ffvH8x3xt+Xb/FWJfrM0iIUXDbvu/w1t30b7t6f99VhX3neWybNy/3a9GnE8utWl9oo3XkhTx/wKqUknzEbPm/2at3SptG9/vJ92qsm+OT5ErrjE45S94rsu1N3zUx442j2fxbvu0+TzG+R9zfxbf7tPhjk/5ada0jEjmLenr5siu833f7tfan/BL2MR6H4wAXH+k2X/oM1fGFjGke3Yn/AH1X2f8A8EvUddC8YGRcMbixzzn+Gav0fwijbj/CelT/ANNzPpOEv+Sgpf8Ab3/pLPKPjc+z47+K5NuNviC65X/roadoMkM0ImCNv3fI3+z/ALVP+NpT/hePiuIY51+6LY6/6w1DoMe2MeTwdy7Wb5q+Hz73s8xX/Xyf/pTPEx/u46r/AIpfmzq9BRFuPJTa25l+9/DXTWMcefJSbhpfk+SuY0dnmZnMyn5vu10+m/6QphSFt2/5If7teRzcupwyidDptvDIqOj7v92tayhmeYfdCRszRRr/ABf71Y+lw4kG+Zl2/NtrXsZPvTb2f5dyfL81Rzcxlzfyl+3tUjbz53+Zm/h+b5aurcCNt/X5F2R7flqrb3ULqY9jH/ZWnyyfZWMaooRvmdt9aD6+8N1C8/1yTIqbovvL/wCg7ayLwQx26eTNIdvy+d/EzVYvE2OJtm7cnzrWczXO7zo/LVvu+Wr/ADUS/lHTiNuLl5GeadMt95/7tRzXTxKr+fu+fai/e2tVLVmk+5DeqybFaVV/h/2apSTJ5O/exH3V+eplKEj28HGEf8RqXWoIzDztsyxy/wBz7zVm+Yka4uZl3M/yNs/hqtJcQ3GLYPtCy7trVJ9udrZnuU+Rn2ouyuGX90+zy+p0ZT1DZJJ5yPgbvnk/2f7rVzeuRxyKqIjbFb/gVa2qXSNal0mZEb726sDWL54wy9V/jasYxme9Tl9mRzEl5tdk8liP4V31UluUjb765/ip0mxZCkM2dv39v96q19JjCfw7fvbanmjzH5p7OXQeuoJGyzfMxWrtvqSSKqPMu+sZrqHzBI77FX+FaFXdMskLyDb83yv96sqlOlJm8Y8x0a6o7YQq2W/u/NWvZ6gm1N77Gbarr/8AY1yFvK63Su7sn8S7WrZt7iaKRftib2+75lcVbAwlLmideHqezmdfb6skMivM/lbfl+X5t1bmn6h5irNHefN8q/8AAa4rT7hJJm+RnX/lk1btnMdyP/ef/d2rXP8AU4R2+I76eJ/mOqsZEVTNNCxMku1Gb7vy1qWdw6sn8O75t33tq/xVzenLNJG6Q3P3pflkX7tb+myTbET+HbtdVWuzD049TT2kuX3S/HIkLK8ULHc23zI//ZqsyWsjRs/kqHX5mkX+7UViwVTN8u3+6z1PMs0cjum77v8AE/y7a9zDx5TgnUluyvdK8cg2Ovy/M+6qlxcJbwvczfuk/ikb7tF1cZha5meNXjZkRY/vVk3V1jKTTbU+7tavUiebUl73vEclwJN7+cz+Z/49VLbMzPzHlvlSht6L+5eP/eX+7TjLbNjY+1v71ay5eUUZAFh8tNj7P4dzfdZqr6hDDGyb3VWZNz7XqPbBJIyeT8zP86s//j1WZLe2uPnG1/L+Xd/drya3xHpUKkpR1Kcbor7N/wDubfu09Y7aORPn2My/6tnpsKp5ypsZh/B8v3qWbY0hTZlP7q14OIj7/unt4ep7t+UtW7P9l2IMfe83c/zNVvyfLWJ4fM+7tZf4f++qqW8GNiPbM3y7dy1qxwpJcLbfMm2Jvvf+g15laUeU9OlL+YS32Kyvvb73ysr1OLdFk/fXTFV+9I38VOt18uP/AEnzPl/8epwh+zKHd1P8P3P4a5+aP2RylEnaORbdUttyP8rPJ/C22rcMiMQk6KG37naP7rLUFjDNNEmP9T95d38NWo40Me93YN935V+Vqly5jjk5RjsamnqGZ5ndtm9XX+7u/vVr2NzNNIzudvl/Lu2VjW7JG0MUCYf+7v8AvLWxDceZI8KfMzfdbd8y1MnPm2FH3Y3LscyTR/ang2iP5f8Ae/3agkj+wWZhvH3D7yeWm35f7tXY1SNSiTSJtlVvLk/hqpcLunMM0kjD73zPURlze6Ty+01CaRFjDpNsCrvdf4t1Z+qTQyMiQJsTb8zQr826pN0LebNs3Ju2rtqpcWciqfJ3NIy7V8v7rV04WPLLmMa/vU+WJRvtlyv2lnUqu3ezVUuoZnWSZNv91/4vlrTaOZVa2hRQ6xbv3n3W3fxVFNbzW6k+cp8z5flr38PzS1keHiI8srGM1vDIokdF2/3d9U5LWHyX2Js+fdu/hate4hSdfO/i/vf3dtZ95dfaIVhtvn8v5mVlr0InDUo80TOW18tok8n5pP8AgS0tqsMkm+F1YbtnmN8vl0rKnmM6PhW+X/gVRQTPuELlVbdudmrf7BzSp8upamt4FXyUdju/8epPsaeWjpNu/wBlqjhkmjuPJ2Z2/MrMnyt/s1YsVdkaGTblvuVjUjLkKo+7KzHNYpcQlPJ2r95Vqhdw/wDLbeu/+8zVqws8MZePlGfb81UbqNFYQfNmvN5pRm7ndy/CZkmn3KIj71/iXa3zMv8AtVDcaem7yfuq38LVsW9u/mL5ybfm+6q7t1PFm8jv+5Uxx/KvyfLtqftWNZR93mMSPQ9yhLby9m5m2yfw/wC7WlpugwrKqB8ldrRfJ8zVqLYorb3T/XL8m5d3l1o2th5ezZC38K7a6o80djy8RHmK2l6G9ri6mRnb7y7fl2tWxo+kos377cvmff8Ak+7Uum6em4pDB867m+Zvl21sabZpIYt8LMi/Lt3r83+9XpUfdPHrR5dy9pFlbNMkyJG6R/Lu/h212/h+2RY1e3+VW+b5fm21j6bYwx7UtvnhWJfm2bvm/u12Hh+xtvNheD5Qy/N/tV6cfgPMrS/vHUaGs3mKZkZ1835N1drotvDFGYUhZX2f73y1zfh1UjkhhebazN8i/e/76/u13On26QTf8fMm6aLb5irurXlOOUpbFyz0uCOP7NCkbSbV3yfxba0tvmW6TeSrN5Wx9y/L/vf71Mt7W23D7339u5fl3LV64hSO3Z0fIX5fLq/dkTGpKOrkc9JBNMjukWH3fJu/u/xM1Z91paLJK6QsRvXdt+6tdHLY+cuxEb7m5vmqnNbwL++N4ybk3P8A8CqfhHTlzT1OU1TTIZn/AOPbLKm3cz/K1Zl7pqRw7Ld1RJF2/f8Au/71dRJY+cyw9E+b5m/ib+9WLqkM1ufOhfYNjfd/h/2mrKW5106fvcxyOpWf775/LZl++2zav+ztrCvtPDbtiK0zf3fl3V1us7JrdPMhjTzN2yTZWDqFpuVkmh2fL96OX/x6uKodtPc5XVLMNl0TL7W+X/arCvLWGORUTa3l/Nt/2tv/AI7XXalb2DRvD58yFU3K0fy/N/drC1iz25d9qSfefdXnVNzvoylE5uaFI5vO+VGb5trS7qVrBHUpv81YUVt38S1eutPS4vI9/Kr9zau2oGi+xvsfzNzfLtX+7/vVivdj7x3RlIns2SMtbQ2ysrfwr8qr/eardiYWmZ3kbf5W6Blb5ttZbXn2GRX2KwZ9qbt33aYusKzI72zY+4v+7XbhvhIqVDs9JuEjmSF3k3tL8qr/AHa6zQ44bi4WFE/d7fk/2Wrz7RbmFm2Qvvdovvbtvy12fhXUnlX98m0bdu1fvV6tGXLE8+p7x6jocfkrs+0/8stu5a7nRW3QxzTop3JuTzP4W/2q838I6hbeWpmhZm8rZtZtu6u30fVHmh+0u7b2dd25PmavSp8so8p5dc9K0G6na1ieb91LHudJFb5a6K1unvIzNJ8/7pmeRa4Kw1izjs47VH2NIzNu3/w1vaXrkMduAjrjytqbmrSMuh50v7p0MMjr++WaNl+/tb+7/u1jax9muN6GFn/ifb/DuqX+1E+zpNbTKjeUyuv95f8AarI1K8QxtCk23d9xVqOX+Ur2nLEwvEjQ2rPs8xV3fd835vu1xeqSp9sTf5n3W+ZU+7XVas1y29YfL3/x+d/d/vLXMa03yuA6hFX51b+Lb/FXNUidNGRxWvbN7O8MiJv2rJ/E26uI1yzWS3ltnfIb+Fv71d34keGaGTY/zLFuWRmridaaG4k87Zgtt/1f3a45RPRjU5Tz/wARJ5cJhd23/fXy/mVa878YWaMx3IpVvlSvR/Elvf8A2hoYUWPdLv8AMZ/4dv3a4bxVDNJCzpbRp839/wDirlqU/tHTTkeZeIPPSZYd7M/8arXK6g0zXDPs2O39567XxBAkUbzJbMjx/wDLRX+7XF3ypNJiab5m2/NsrilGX8p2U5fCNW6RpGe6ufm27dv+f4qivGSRhIjsEX5t396mtj5tiZ2/Lu2feqNleSHZHwq/dVUqI+7sVL3pkd1N5jJ5iblZ9u7+7T22RyMET5Pm81W/u/7NRLDu+dPn/wB3+Kp1W53NMnyqz7l3PXRzmEf5RLeR/kdIW3Mn3VWtJbNG3Q/Zl+aL/e3VDD+8k3zblbfuWRavWqpFbibZub723dtrCpzHXRjEfDazyQ7HdU8z5av2K/YQ0Gzeypt3Mv8ADUVn8rfu0ZQvLsvzVoqqLcBPO+8isit91mrklI9CNPmjzF7Sb7yykKWzfdbZu/hrotL1KGHH77cWiVkZf71c3DJ9lZN77ZG+barfd/vVb0+5T7Qu99u75katqMo82hjU5up2tjq1t5SoHXLffuP9qvQNHlQ+DVlAOPsrnBOfWvHrWaZpGm8/a8ny/f8Al/75r1jw3dK/w6S63BgLOUkk4zjd/hX7b4Ku+cY9/wDUNU/9KgfQcLJLF11/07f5o5yZoZpC7zZj+9BJ/F/ustZmqTIszIi79v8AzzpYbyaTfvRn/ufLtqreeTaqzusnnM25fm2qv+y1fkMa3KfFSjzGfqk2632Wbsg2Y2/d2/7Nc1qz3McjwPJ95F3svzLu/wB6tm+kubjfO7xh2Tb8yfdasLVPmY2czqv3vvfLW/teUw9nzGRfXSQzOny7WTanz1z2rXjpI/2Z9q7fvL/erV1pYY2R0OxWb7y/NXP30bm3b7w2v8+3+Gp9pGQo0yjqF5uXYiNn+Pd96s2aTzNkJ243fxf3qkummkb53/g+bclZsmoeX8j7VH97+81ZSkbRLrSW3k7872b5drf3lomm/c7JplG3bs2vWZ9ukmUwzPs+b5f+BUn2ny2/hAj/AIWrjlT9/wB07o1Pd5Tfjut0zOiYdvvf7tWrNv3ZfeuN/wDF/DWDa6h8wd593zfNV6x1J49yJIqLu3J8v3qwrUZnZRre7qbiyOuI3flU/h/irRhk+0Rs7v8ALt27VrFtdReS3b98rN92r8d1C0I2XPyx/M6t/erlqQud9OX8pfhhh2qjpvaR9qKv3v8AgVWFuEk2fJsf+JW/5Z1TtdQmuFZEdkRv4lqz/pMiqg2uVbbXNKEubU6Y1OWPukM0fnXB/wBJ4/grI1NUaTy5kYhfuba0rrzdwT7Nna3zqrfdqrqtu6xr5L42/cVXrWnHl5UZy97Uy/s++TEiMit/DI/8VQR2X2hmhm4H+/VqSHzP3Lzcr83+1XQeBfhzrHiq8httHs2keSVV2+Vu+9/s130Y++ebiJcsRnw7+HP/AAk2qW9nN8jSSr5W5GbdX6r/ALAP7FfhvR9M0258N+D7W/1mS9VpZr6DzWX5f4Y/4a8s/YO/Zb0Twt4403Ur/Spr+6sd32qRbVWgjk/u/wC01fpF+zLq9/8ADG6u9A+Ffw6vLvxDql1591qmqOq21nDu/vf8tJNv3VWtqlbl2PnMRW5pcp9P/A3wjeeGPBdonjbTbW11Lb5UW23WPc3+yq0z4wfHr4K/APQP7d+Kniy3WWF/3Vjbxb5ZpP4VWNf4qu+Cl+Ilno9ze3lra3N66eYt9qMu1Wkb+H/ZVa+WP2l/2fbzxRHqU/xR8f2d4983mWtjodvJuXa3zNu/hVf71c060tLbGHLA4P8Aa9/bJ8WftB+HrTTPhJ8N43fULryIrrUl+2XNiu370UC/u45P9pvu1o/smf8ABOvWdU8Pvr3xU+NE1jLcKq3unyWSyysv/XRvl+b/AGa6D9kv4K+EvC/iaDw74M0qaGwtV8/7VcXDSXNxM33tv8NfaPhzwNBpmmtiHyJZFz9ocKzL/wB9VtSlzRugb5jz7XPB+i/Bf4Yp4P8ABnhiN20+3Vl1jULWPy1+b+KvnH4pal4t8YFL+GGPVnkTdtW82qu3+7XvnxnuPAei6bcN4y+IcmuyzTsn9mteeXHuVflVlX73+7Xw7+0d4os7G+stYm8SeHYXum2RW9jebHjX/a+b+7WVStKUiPZ83xHNfFS4/wCEHszrfiHwlfW33pfsduvmt/vKq1leHf2nPhj4quH8PaJ4km0p2dVnsbiJkkZv4lrmr79u7XvhrJPoPwr8H6TtuItqXXiK3a7kbavzNury7w78PfFHx41C51i88f8A9ircXrTy28ekrBA0jfeZZPvbaw5pz1pm0eXlsz0T46/st/DG5kl8beH/ABDeTeJLza0unxt+6aP+6zf3qf8Asl26fC/4pQp4h/Z5mn06SVWutS1C/wB7fL/Esar/AOO1hfD/AOFfhfwz44t/D1/8XZrm8t4t25d3kKv+1u/i/wBqtj4mTePPB+uR674J8eeKLm2hZV+0aT4f/dqv+y3/AC0/3quUqjjZmXL714nrnj/UPFXxd8a3Gpab+zxo9vYrdLcRah4ksNsce3+FYl/vf7VdKv7ZHxD+Atj/AGl4wv8AwHrEUd1t/sfT5drRq3/LNY1+7Wf8OP8AgpRo/wAMdJ0rTfiF8N/E2uWrSr9q1LVLWGJW+Xb91l3Uz4hfBH9hX9uDxR/wmH7Nl/caV4ptf3uraTpM7LFqTfxRsrfLu/2v4ayk4zhyS91mnLKnLmR2d9/wUg/Z4+NkNt4D+IXw9k0F7qLfFeQ3Xybv9la+Y/23f2Xfh78RtJvfij8Mdet9SNnp0y7bf5XmXb92T+9838Va/ij9nn4P+D9Qm8PfFT4o+D/CeuW8uyLw6uvfa7qNf4d237rf7NRaL8L/ABV4bhuNSfXpNX0e+umVLqFNqqq/dXb/ALtRGUqPu812TKXN76Vj8j9b0+5tdSlttSh+zur7XhVf9W392o2t0+WFLncF/hr9NPi1/wAEi7P4zatL4z+HXi2ztZ7z/j4sWfayt97dt2/3a+O/2gv2I/H/AMB7iayvEjuQrM3mQy7m+X/0Kt/q8pQ50fQ4LNqE4xhI8Kkt3WHf0ZXasu+hkZPv4Pyt/ercuLVPM8mZ2H+7/erP1KNFh2WzqR/Ezf3qxpy5fcketKMJe9E53VFTy3TP+18vy1gapG8m596+V/Atb19+93o521jahG8au7lWZt3yr/dr0KfNLlPMrS5fhOY1BWZPuMv8SstYt8sMWUfdub+L+7XR6hH9qlKD5X/u/wB2sC9jTa298n+9XfT0908mpKXMY0ypDJsHztJ8v+zVORC0jJ53zbN1Wrr9yzP94VCkfy70fI/j3V083vGBBDvXG87t33mqaFAGXYn3qTydzbEdf9mpLdXVs9dr/eqvhI5mXNPX5mR/7ny19nf8EwiDoPi8j/n5ssj0+WavjS0jhVdj7sr/ABV9lf8ABMJy+heLywwftNln/vmav0jwi/5L/CelT/03M+o4R/5H9L/t7/0lnlPxqm2/HjxYgAI/4SC43Fu37w1V0uTbcKLaHd/tN/DUnxwM3/C+PFyxy5J1y6wPT94aq6TJtjXDsD/Btr4jiD/ke4r/AK+T/wDSmeLj+b69V/xS/NnX6XI+77jKG+Xd/C1dRpMiNAsNy+8fwfNt21xGl3otmVzN8rJtZfvV0Ol3iTQq0MKtKr/eryJR93U4ZbnaafcFl5fYq/c2vWzp9518lF837y/3Wrj7PUXVlebam7/nn92tjTdShEwRLpf95vustBHKblrM6zRTu7THZs8vbtqx501xIXwu6P5n8xPlb/gNYq6tNHCkKIx2/wC3t8ula+S5kXyNu1vl3K27bTlLsXysu6tqCKuzzGB2bt38NYl7qE0aF4uFkbbuj/hqO8vnWPMz7l2bvlesi91R5G3um7b9xd9Z+05vhHEnurxoRs6+Y/z7vl2rWa2oIJFSFOfvJt+7WfeXSSKdh2j+Pc3/AKDWfLceRCH+0ttVfvfeqZfCejhZe9zG22oJC/yQsN27duXd8tQXGsPGuyP51VPn/utWW+pIyrCkzYVNqtUclw6rJCjZC/3Xrml70rH0uHrSly2JtQvnuI2DxxrE38NY+pXaKzpsykiL8u+lurxJIWR/u/8AfO2snUdS2ln+XC/L8tH2j3I1pfFIoMzu29E+6m1lqCZpmXY+3K/3f7tLIz7iUC/e/iqG437sf+PVjKPQ+Zo4eRXjj86d/wD2WrNqrzKrom0/x/7VR6e0KrvRGG19u6rdnG8bbE3ZZ/vVhKXKd8cCWLNUkjR0TL/d/wBmtS3t0ZPOh3b/AO9I9U7dJDIu9Mt/srWtart3p8zsv92ueUhfVZFvSvtLfvkTYN3yblrZsbc253o7fKnybm+9VCztv3ZmfawZdv8Au1qWtv8AMv2NPNVV+bzGrH4iOWMY25TV0i6dW/cxsQ3yvu+6v+zXSaPHHMrB/vr/ABVzel3k1um/7MsiMm52b/x2t7S7qJd6OrK2xW+V/vV1UY+9flMuaMYG7BdQ/wCuuYW/hVWV/mZv71STTeXZuQnKu21l/u1kWMgl3u6NsaX/AFn3fm/2almu3Zvs0L5C/wAOyvWo6e8c1Sp1KOoTXjR/P825P9W3y/NWPOs7Mfk8xf7y1q6lHNJK7xuyMvzbf71ULqNPuImVb+KvSjUt7zOeUoy0KCw+Yjp8zjf977u6o185MfZiy7U+ZfvVaa1eFg7n5WX71VfL8uRPs275vuf7VOUoS0OaMeUVWRspDtVu22nRyQtiH7yt9/b/ABU5bV1kYvDj+Ld95adFYvDGvz7WZvk2xfLXBWlCR208RykM0O3/AFL7Ds27mepoYXaPfC+x/wD0L+9UsdnayY2PJIV+5tT5as2tqkatCqMzs3yf/E7a8HES5T3MLU5o3Qun2MMa/aUtlXd8zzbvvVdt7V5v9d5mfl2L/Dtq0umTRwtDDDG3yfdX7q1aj0lGVUudwdvmZV/hrxqkuadz14/BYq/Z3X7m5N3+tVqfHD5jb3/3h/dWr32JFjeZJvNdf4W/hp32GFs/Iz7otzbfl21EuSWhfMQQwuqpNc8NJ/qt38NWYY0kxOm5dr7dzfdp9rYzSRlHh3xr9zan3attH5MZhhtmdVX72373/AqqnGUpcqOSpUjGPvCWbTPOqTeXnzW/eMn8Natr50kPkvtz/wA9FTbWfG0Jh+SHcrJu+ZGVlq9pk0jTffYxL9xWb5q19n7vKc6rf3jTYXL4hublQN6tuZdzNtWoNSkP33/esv3WjanKv7z/AEOFmO6okt0VvJdG+XdURo/DGJp7b3blK5mhjmREf5tvz/J/47Uas8a7Eutm1G/d/wB6p76N3t1T5mib+FX+as2TY28Ju/eLt2yV3UaP90yqVJdCyGto7OKb77Rtu3SP/wCOrVaSb7Ysbwjb97bUULO2xJ3WIR/cj/utTftCthEmkfc+3dIm2vWpx+yefKPtPeIL7eqvC9su6P8Ai31kXCwlPJ+YO332rS1CNPM3v8u1d21WrI1KYSK7p8iq+12V67IxMpUylNJMsyRnyz+9b5m/i2/3aa9x5jK+zYG/8dptwqHe77lDfKsjN97/AHabCsNwy2021gq7ttacsTllHl90s6XsYMjyL5sku7ar/wANaDLCsmyENlfvsy1ShVIdjujMy/c8ur9vlo3d02tu3IrVjUkZez94fZs/+0W2srKyf+PU+ON5pPOd/kb5dv8AtVHn7KzjfJ++2/x1chVJlLxjZu+Xcqfdry8RI7KcZdCKxsfJkeb+98yL97bV+yt3uJvJhmYts37VSoYYXVRCjthV+eSRPvf7VXIZlhxD5ys23a21az9/4hyl/KQrbo67N/Kvu+WrMaQ27ffk+Xb838TVHJcQqwTzGJ2feVKRri22p+5kLr825d1ddOPMeZX/AHnMy9atDHGZt+6P+P8AvVs6fNZtG3nWef8ApoyfdX+GsGzkc3n2b5odybt2z5Wrc0uZFZXkO3a+395/E392vWoRueJW5onY6KqLDA7zNsZPu7du5a7jw7HD5MUycfdZGX5dtcDolx9lWPfDtWP5k+b5t1dj4bvEkhQJZ7mZ/uxtXqU480bnjYjl5jvtEukjKI8yyuzt+7j/AIv96uw02TdYq/ygbVb723/vmuC0O6+0YmQMzfdVfu7a6zT77y2+eZXEaruVl3fNWhzfEdla3VzMq73Xy9m/b/EtXproLMXR1Kr/AOPVh2OpPDuS2udn2j/XtJF8rf7tW4byBgyJMoiVWbdJ8tTzFRo9CzI3kyfJD/Budd9Zt80Mjec6cf3W/hqaS6tm33MO4LGu7zG/iX+9WbcapbTX0aOi7GRnRl+bdXPKsddPD9yDUm8yPzoYfNGxlVWfbXO6hZpHD5PkwvtTc3zfMv8Au/7Na11cedC+P4XbYrVh3U0CxlE5RflRd/3axqVDqjRlEytQg86P7RNNxvXarL93/gNY2qfLcb5nyyqz7VrbvpH8tvJuViK/f+T7tc1rV1YW6vv5bf8AdV655VOY6Y05dSvdb1K+dCzI33o2T7rf3qx7yGG6UlHZ1Z9u2b+GrGsa88kLzJN8y/LukrmtS8Q+VG8N1Mrhm3Iv8K1yVJc3wnRCPSQXzOuxI3XdGu/cv/xVZGtahbW5l8mZkb+7tqjrXiia3tWe2O5938L/AC1yXiDxg8d0qQvHtVG+Xf8Aeaufm+ydtOUuU27rxAscgebdsX7n+0396qC+IEaTYu53ZvkZq4+68UQs3nJ8jr833/l3VUt/FE8lwD5zKy/3v4q7sPEwrS5j17Rtc+yqr/aY2VV+RfvV3/hDWJpoxEjqs396vEPCfiIbh5M3zb/n+SvR/CuoJtCTXO12Tc7f3a9KlLm+I4an909o0XVraHYj+XCzIrJJ96uz0HXHkaK6e5Ybfk2q/wB7/aryPQb52mhmtplO5Nv+9XcaLqSTR7/s0aFvl3M+2vUhJHnVn05T0bTfEG24W5G0Ddt2t81dLa6k8ca/PGiN92vPdI1CH7KmbmR2VlV/k+8tdPoMnzbJvnDI3zfe2/xVvGUebyOGpGJ1Ed5eNC0LzZ3ffZUp8cN7HEu94X+Xay/7VVbWPdCh+07UVVZ9rK3zVZh2TXHybUZvl/eU+WJEoy90ydajh85EmtlIX+JX+Vq5nxFJ+7W2Ta7bWZ5G/wA/drrdU8wzM7pt2pu2/wAVchrUcMcO3eyp93zPustc1T3TaG5xPiKZLhXdywDRMqx7P/Qa4jVFRVW2e5bY27Yuz7tdv4kaDzD9j2qyvtfdXF+JJLaNltvs+59+5W/iZf71ckpWkejCWhxviq1tri3ZLYs6LFtSTf8AM1cPr1pM1vHNZTZ8ncvzfw13mqLCsmxEaINuXav8X+7XKaxaosO9JmQyP91k+XbXNKJ0U9jzTxBaveQuiOzQs25o64/UtK27/k2D7u1q9R1SxhhD73XMnyoy/wANcl4g0ZGuvLm+fb92T+9Xn1PeO6n/ADHEzWqLGZl/vr/s/LSNC8f+jOkeV+ZW3VsTWLyTb0+6v3l27lZaij0uGWR5nh2/3/8A4muOU/sm/LKWxkR2czM1zN5iL/Bt/ipi2+6bcjs21v8Avmte60/gukMi/P8Ae/2aotaeXMN6Nlpdyt/erb4oaClDl5R1q3kzjZDvVX3eW1Wobh/O+xony7NyR0+1t0WPe8m9v9lf/HasWLwyHzkTcrMyt5iVjU/lOmnzRiT28dy2zyU3KyfearkK+XIIUT5lX52X+FqdZ2sxjML7lC/6pd9W5NNSFVd3Ywsv8X3laoj8Oh1KU+YrsyWKs87tnZ8+5d1XbVbaKaOCZIdq7fm/+Jp0MM6yF3dlZv4l/hpq27qv2abgt83mbfu/3aPi+EJR5SeG4hjk+ROVdtm5/u/7VeweEl8r4UqpPAsZ+T3GX5ryFrf7PNDG+1wyr8395q9d8Ks7fCf5mJIsrkHcMHhnFftfgnJvOcf/ANgtT/0qB9Bwwn9crX/59v8ANHBR6pC1v9pLtvV9z+X8zbahvdRRp5Eh8x1+6qyf+hNVHdPbt5P+r3Ju3L91lqvJqXmQt5Xmb/7v3a/F5Vj5uOH7C3135PzpDHub79YGvSO2+ZJvk27kVv71XbzVvJVnhfHzrurF1jUPtELom5t33FX7tRGtLmuZywsTKvrh2k+fhf42/u1zuqTec/z3Klf7v96tK+utirv+dtn9/wCVWrIvo5mVd+3d952WtI1uaXumX1flmZ2pR7rht6Y/hVmf71ZV5sZvuKo/gZkrQul8zbs2v/d+SqF8r/K8z8L/AA1rGXtCJUyncO6/Ojqyf7S1BJqCbd+9d27/AL5qO8ZNron8Pzbaz5pvLYQvHubq1ax7mMvdmadvqG2TZs2/7Va1jNC0yTbPmXdtWuUjuE/g+Y/x/P8AerR028dWaabhm/i30qkZ/ZNqMpc51kd4jRD73zL8/wAladldvIu/5v8AYrlrW8dlx9p5Vv4q37G+eRdgTKbP93bXBOPNI9ej8Bu2Nx+5SF9ys331X+KtNV3fvN+xv46wtPkSOH/XMzKn8Va6s7bZim9pPv8Az/w1xVI8tU76ceaER+o7/McI/wAzf8tKozQpJh5nUt/Gy1oyR+XGHROVX5/7u2mW9ik2fu/3vm+WrjGPLzGVaPNLlKNjpdzcSeXs2v8Ad3L/AA19HfsX/BPxz428UQab4VsNQlu9Qf7PYWtv96Zv4mZv4Vrz34DfD3SvEXii2tvEnFvJdKl15MW6SNd38P8Aeav1t/Y9+GmlfBfxF4a03wToOzxTq37+1s1iVm0+zZvlaRv4Wb722uylpHmkfOZpWlH3EfQf7Fv7HE3hpbLRfiEjJLawxyfZbG12bW/i3O1fXGpeAdH0icaroWg6VHKu1P342Ksa1bub6Hw9o1os2u6bazKkf2yW7dV3f3q+SP2wNO8YweNTrnhv4reIdYhvnaKLSLCz3QW7MvzL95d1TVqez+D3jx404QXvnu3jJ9burpNP8N+PNLheblo7V/P+X+L5f/Ha+Y/iV+0J4t1rXLzwB4WezsVt7hotSvLho5ZY4938Kru27q8Z1j/htXRdaSGb4PyWMMcSwJqGpaktqs0e75VWOP5q9c+FPwtT4aabL8Zf2h5vD/hXTdPeS6XT4Z1iW8Zf4mZv30zVyzS1lNGnxQjyHrXwQ1fwH8APCr/ET4l6xpelK0TLbzanKz31x/d8iD+L/gK1l/Ff9tr4kaxo93beHvhvNoOix2Uk/wDb3jLUo7F75f4fJi+9t/8AHq8W8eftKab4km1T45eAPAOjldPX7Ra+KvGTyeRGv3VWDzP/AB1Y1r5r8J/C/wCJ37fnx5uvFXxC+Md5r0G7zdUuriLyoreFV/1ca/dgWoVaOIjy/ZNYw5IEXxE/au/aN/aS8ZWHw6+CejR3UC3TJOuk7vIt933ppp/vN/31U3xA+CPhf4a6Dcw2dnpOseIbW183xDrl5KzQW67fmt4F3fNJu/iavqjRdS/Za+Gvhu1/Za+APifw7pVu2lyXvjXxFNdKktjCvzNuk/hXbu+9XwB+1x/wUy+BviLWdc+Fv7LXgxb/AMOaDLJbp4qvIt0epTN8rNHH96Tc3/LRqvD1MNT92GpnKnX+KZm+H7fw34s1h7nWPEP2izsUjW1tbN1T7VNI3lxwx/xN81fQ2h2fwf0HXNU8B+Lfijo+gQ+GdNZ/GV5ay+e1j8u77LD/AAtcMvy/7NfEX7JXhP4nax4/tvjB45SbTfDug+dq95faha+XH5yxt5Kq33du7+Fa89t/Elh4H+0eJ/H/AIwW+k1jV5tRvJrjd5V5IzM3/AqVatyRLp04y1Pr7xN+0xc3nhhrn4G/C6Pwx4Gs5WR/EmtQLJqWqNu+983yqu2qtr8cPj9ps1t42sPiLrmrWkL/APINt5Y/L27flVo1+6teReHf20dB+I11Z6N4nnsYNKhg2263Vv8AuF/7Z1778MdN8T3Ghr4q+A8PhXUWk2xXWnwxL/pTbd23b977tc8cVRnK8jX2M/hien/AT9szxD4+1XT/AAl8WvBmkvZ3Hy+TfWCu8m5tv3tvy19Q+KvhP8OvAfwz1HR/gb9l8I61rE6y+I9U8P8Altc2q/eW1X/nnu/5aba+SP2Vf2tvgtpPxkvfDf7VPwht/DF7oqSOt1b7mit1X7vyt975v/Qa7rwj4hf4f/EzxJ4q+EvxLutc8PeKriS9lutUVd7eZ95W3fd/2a562MdKTUZfeaRwrqbxPN/26Pgbf6potr8QhbWaap4fZU1TyUXzLxZF/dyM22sz4O/EDXtL0uz0TU55prZv3kULP8sfy/xVteMNU8SX2g6rba3qTP8AatyfvpdytGrfKv8AwGvM7q617SfD8iTSQxMq/wCsX+7XFWzLnnHQ7KeWyjTlc+mfhT8dLDTPESWdzZ7HmuN3nLKqqsf8W3+9/wACr3b9oz9iXwL+0F8C7q/1XwBDcOsTXFlq1rdbZV3L/s1+YeqePPFWh61bX9hfw3Lx2qxRRtF8u3duavtX9hX9uLVbJYfDfjy/aIr8zTMjLEqt/Dt/u16VHHOjGM90eVWwvf3T8yv23P2Fde+BMlxrdhqtrcvCypFHbuy7l/4FXyheXyfMiQ43P/49/tV/Qt+2Z+yzoP7SWgzeIfCv2W+tNY01kuI7ODzPssi/N53+zX8/nxu8G6l8OfilrngO8hk83Tb9leSbcrMtemksRHnid2V4ypH91Pc5TUZE3M8219vy/L/FWLqChV8x/My33v8AarTvbibkbNyfd3L/AA1lyrhSmGf+63+zXRT5uU6qkjn9QYKxm8liW+X5W2/LWLfKjN8/Cr81bl4vms6Qp83+9WPfRPJuf73y130pRPNqGPfTfP8Acb+6q1U8vbtd/lXf92rtwvyrlmX/AGarTJD8rp83+9W0eaRzczKskO5h5gbDVZtU8tvk+6v3KZt2bn2Z/wBn+7U0LOXZN9WLl6Fyz+7v35/h+avsj/gmGyPovjBkP/LzZcDp92avjm1jk2qn8K19kf8ABMdI00TxcIhwJ7Ef+OzV+l+Eji+P8I12qf8ApuZ9LwcpLiClf+9/6Szxv44s3/C+fF5EPK6/dbW/7aGqGns6qif886s/H+WcfHbxa0UmB/wkF0u3b/00NZGn3yXGCm4fJ/FXxHEH/I8xX/Xyf/pTPHx+uOq/4pfmzrtLkdoVd3+Va27W8+yyfu3/AN+uUsZH2BEfaF+9/tVs2N07ZhdFcf71eNLm2OWXwnV6XdQqvCfIy7d2+tKG8fzB5Kb1ZPlVv4a5iGT91shdV3Vdt2vFhCb9rf8Ajy1XwmXxHTR61CsZs3hZ/wC/8+1agm1SGNnbyWwq/dX5lrIa48vZ94nbtdart+5ZpoXkBVPu/wB6iMfcHzGhdX22AQ71+6v3k3VlaheOtw6QzRpudmVf4abdXTy/vn3bvvI396su4kmVnhmdWXZ/49RGMio7heTTrGqPc7T/ALPzVUa7dWaZPnLbqb5kM0n+sbCoy/8AAqptM+0JBN838W2lKJ00+5JJM8a+S7/e/u0yS4RZhGjt9z5t1R3E3mbXeZS/8H96qF9Ik3yb9yt/drnlHlPWwuI5eWJZuLh4V2O6urfMm6su8uklk2O6pu/i/houpkUh9i7l/h31VuJvMjZHRVC/3fu1j73xHvwxEZadi5Nbo3+rT5qrbXmZU2ba0riPy/n8n738K1Tkh2x+ciYdfmTdXHKXuHoUcKRLC+fkTcf7q1YXzpY/v4Zf4lpLdUKs7zbdv91alt4/l+Tayqm/a3y1zSly7Hs4fB80S3Z2z3A2I8ibvmrX0+ZNrQyblDPs3f3ao2qutuod1X5PurV2zhhkhXem3/Zaufmi37xljMHyrSJqaeP9IML7WRfm8tW+9W1DJbKqzJbbX+6/92sfTVmhjCTOvzVoWbIkj/JsXZ8m35qrlifNzjOmX7KZJJDbGHZu/wCea1q2N15WbaRlVN21Gk+8tYcM/wBnZ/ulf4drfNVyO3+Xfv2fP/e/irpo6SvI4pbnR299t/chN/ly/djqW6vNqy3ifJt/hj+ZvmrLsYX2k+czbf7v8VW7dnbdsRvlf72+vUo8nKcMoz+0RXM1tIrWzOz/AD/7rVRvgkn+pHzbtyRr8q1oXFucfaHTc0b7kVfm8yodQt3muEfYqrvX5VrsjU9y5lKMpFLznY5k2o3+9/FRDZodsiPs2/Kq1O1vtma58lnDfNupLO2SH9y77X+8rUpS7mPxTJJIXjZYZm2FkXZtp7W/lje6+Vu+XbJ/ep63DzBt6Nt/8eq59nSRU/fLcMyb9rP93/ergxFblOmjHmKMNrhgltJ5X+0q1oaesKqXv3+dn27v9qkjtXa8TyUZj/Gqv8talrazKx3zcyP+6XbXzmIqTlLlPoMHT5YXJLOxZVR32vKz79s1XLhZl3P5Kuy/c8v+GkjtrlVhh87zNv3/AJfu1dsrW8Wz+fn+8u3btrglKX2T1Kclze8UIYX8wu9srq3DU6OFIz51yW3fdVf4anhhMU3k23Lsm5FZ6uRab51u+xPKRn3Nu+83+7V0qcakia1b2cNSnZx3MkiTO6rF91l/iWrccKXLNCkOxlZvmVfvf71XrO1MkgeF1CRrtlWRPmarENvNubY8bLs/ufMtelTw84zseXWxEOTmMy4t7mG3CImGj+/u+ZdtWdPtfOVEfllbc+1NrVpLaz/Pv3bWVfKbZ8tW7bR3um8+2sPNaZP3sm/bXU8L/Mcf1rrEz1t7lmlS2dY0WXft3/Kq1Yj02/aPi2Zoo3+Rv9nburetdGe7tfscPG2Jdv8Ae/3a118NzW9uiJDgMv3mTcy10rCx3UTP61zfEcBdabNMr7E+WP5Xj+4y/wDxVZF9oqTXSzpCoZom/dt/DXp83hu2b906R/KnzeX96sy80FJC7JCqhXX5m+X71bxw5vTrcsOWR5y2mzMy/aYY0K/N5i/NUUmkvdeTIj4ffvZV/vV1114fvGjZJoMxfNvWP7zVD/YvlKHeFT8m1Y2rojT5ZaGsbSicRq2nu6+Xv4+6396sa6861j3wwr8r/vVau11bRbmS4T7Sm35Pmkj/AIa53Ure2aR4Zk3Dcv3l+ZmrTl5hfDexzl5LDueb7m3/AJZ/e21TC2yzM803yfxsr/d+WtXWrBLWMu8yjdKq/L95qw5LidmNtZpjd8yNs3Lt/ipc3MYVI8xorsaYIjsFZdrtG3yrU00z2tqyfaWX5v3W5d1ZNjdTmRfnUnd86/3quLI6xs/ktuZvvbvu/wCzWEo9zm92MS3JebVjmdFEv3X/ANr/AOJq/b6xNCws0ucSL/D/AHv+BVhPqW7Y7puXfuZVT7v+zVmG8haNnRG+V9u3+Fa86pTjz6mkanWJuyXm23DzTfPJF97722j+0ZvLO9F3/wDPNX/9mrMa68pfLhTMSov3vm2rSLeTzSM6IrtJ99v4ainGZMpcppfbXklGdvy7t7L/AOg1oafNuhW5eb5f9p6xLG68xCmFT/gf3WrR0+JJvK+7v2ttX/ar0KK/vHl1pcpu2quskkl48ez5dm3/AHau6XG/nM7w5C/J833Y/wDarGt5vLjCefnd9+P+Ld/erZtd8yGZ5mf51X5U27q9bDxPHxEoy3Oo03YzJHv+ZvlTd8tdXo9wlrIiQzf6xPvN8tcdpPlyXaQyP86/LFu/irT0++QYSdI9u/b83zV6cY+4eLWlKMrnouj37rbiaN9u35dzfxV2Wg380avc78JJt/h3f8Bry/Q9WT7Lvk8tRG6q/wDe/wC+a6rRdcghZ03yBWT55FolH3bGdryuegw608d1Eny7V++v/s1aS61CqjY8czfe8vd96uBsfEFndMLO5eRmWJmiZU+X/gVW7XUkaNN77GX5JdtctSX2Tto05HXf2h5cfkzSMvy/dWsy8uIbiEJsYtH96NX+as2TVkjjE1s7Mv3dzJ8tZ0+sQrIEbdvkTf5zfw/7VcVSod9OmbGpXUMLI77vlTdtVKwtW1iaTNtC+xN/3o1+Vay7jXZpF3vcs6qzeU3/AMVWbfeIPJhR0fcy/Knzbf8AvquWpUlE6o0eYtahrX2iF7VHxu3K3y/Nu/vVzOua1D5Zs/lYfd/2vlX71VtW1vddPC8yp/F81cfr2pI29IZo3Kv+9/e/NWHtDo9jIta14ihWPyd8m7duf/arivEHiqVXKbIx/wBNN/3v9ml8QagmnxqNjZ2fIrP8u6uO1rWAzfJtHyfNTlIcYjda8YXOZUR2H8Kt/E1cdr3ip2kaaa5+Zf7r7ttO8Qaoke3ekn8W9t/y1y958zPs+7s+b+LdWVOMzb4S3ceKImUpC7Nul3fvP/Zav6Lqj3F0yXKZMf8ADJXISfNdrP5Ku0L7U3fwrXQaHbzRKibFI3bt0iV1RlEiVPm949O8L3k0cKPC/wA33vu16R4U1KZduz5nbbvVq8r8KiZZIUd2zJ8z7Ur0jw3Hc28bTeWo2/KrM/8ArN1dlGXu2OGpH7R674dmSFrdneMBvlVY5Vb/AIFXW6XeJHvR037Zf4mrz3QVtljt9luuN/3V+Vt1dp4daOZY5k/1v8a13xlM46kTvdHuoZreF3Rv7rqvzNXXaTcJGqpvYM3/AH1XCaLNDNGsPmqpX5k3LXXaTcbriJ3hzt/ih/vV2xqezOCpGUjtNNvE8scrC2zajf8APTbVyONI/kn2rLI+7zP4masTSdSht08mZ94bcyf3l/3lq1Lqt40f7mbeWTc25fmrpj7sOZHH74/WJvs8yedNsKtu3fxf7VcTrmqItw8PnL5bSt8zfMzVta1qmGXzHzJH81cXrWqTJIzPZttVfvL/AAtWMvjNo+6c54hvIZP3MMPl+XKqtJt+9XJatcfbJEuRMrLs2qy/e21taxdPfTGZ/kXft3Mtc1qVxMzN8i+XIjN5jP8Adb+7XHU5JTO2n2MbVr52bY7yM8aqu1fu/wDAa5nWozHvvJkjLx/8tPvV019F82+a5j3yfLE33Wrm9ctxGyXNy67pEZUrmqHXF9DndSt0S1R3hUL/AHvvN/u1z2sRJ8kyQs8jN/C/ytXRag32qGTziqDavzR/3v7u2sbWP3jh04/iVvuqteVW907aPvSOZuLVJ2aH7N80f3mVflqC1hSOQ+T97/vqrs2+aR32Kqf3qbHC8bZdG2fdZv8AZrzZR9/mZ6NOXL7pk31qFtWm+bc38VV4LfyYUR4WIV/4q3LiNI1MKfN/EjVRukSZVd/LzGrLt/u1pGfKaS94qx/vF+dI12tU9nZ+XcbyisG/hb5lqPynj2TTQ7W+9t/vVoWdxvuE+SNUV9v+1upSlM1pxhyly3X5XhSFi396rstm7f6Sj8LtVlk2t/47VbT1eZWTzm++zfvE/hq5GyXqh3fbIyfwp96lGnLm90rm9wRo/Kk+eFnT5v8Aap8dok0iTBGYr/Du+apPs0wRHe1ZQ3/LRn+ZlqXdNMweF1C7m+VV+Zlol7r90IxnL4ih5L+Z/pNtIyt825vvLXrvhg7/AIVAlA2dPn+XGB/HxXmVxZv9oZ38wL/H/srXp/hoxv8AC0eW+VNhPhiev3+a/a/BF3zrMH/1C1P/AEqB9BwtGSxNW/8AI/zR5JeXDrC0Lp86/cVm3Mq1k6k3nW7F33q33m/vVueTsmfzoWH95f4mrH1SHdI8UPyD+7/er8MrS5fhPFp+9E5vVDcyRtDE+WV/urL8rVl3X2xd801sqL951jfdWnqln5Nw8rxsDGu35azLizDM1y82Pl2uq/LUxl3kWZepSBlaHZGv8O3/AGapyRurbN+4MtackKXUap8qL93d/s1Wmsfs8LoX37fubkrSnWjEzqYfmlzIxNSbdCkKeXjZ8se3/a+9WdeL5jNCm3O/5619SjdV3w/7K7WrJuFmhjlTO12fdu/2a9CnKMYHn1qfNMxLxbaOTf53z/x/JWPqEzw5SFPm/jZq2L6ZIyZvl/4F95qxNTkhaY/J/vV2UzjqR98heaCFv3jyFmq/aXF1JLvd9p+7t2VlyfNIzoy/7tW9PjdptiO2KuUeYuJ0mnzHycI+5lT5Grb0ubzI96PJu+981YWhxmRm2bd38O6un0bT5mj2TPgM/wB5a5alPlPVo/Cauj28O3f97b83+Vrct7e8upopkZvKZP3X7rbVPS7SH/Voiq38Lfdrf0mHyz88zRj7qL97bXHL+8ejTjL3RbWBJGELuxVX+fctbHhvw7DqmqfY4bbzXZf3q7/4f71JbWMy5Tdnbt+XZ/FXT+EdFe41iJEh3Sfwbf4d1Y+zjLQ3qRlGHMfS37Enwj0Oz14eM9bh85LNldI9m7cyr8tfpL+yP4BufDN5e/GbxJNavqWpP/oG394/l7flZl/hWvlj/gnX8HbnWNF0rw09neL9uumkv5JIv9XH/F8392vv/wATa54Y+DfhWbUrDR45/wCz7fytIs2TatxI3yx7qcvd91nwGMrSrYiR0Pw70ebWlvr/AOKmq6fqEzStLbxzWv8Ax6x/eXd/8VXIftS/tQfDX4e6Omm6V42stUmk2/Z45tO85V/veWy/+hV5n4r+L3xRm8L33hKw8KxWmpas0b65q00v3o2X/UxrXkPxK+HusapHN4qubKTVbyx05lSOR1RI1/8AQVWvOlKvKMuTQdKjScrSPG/2kP8Agol8VLPUH1+58VedbWNwy6No9qu6RWb/AJaMzfNXz54u/ay8Q+Jr+2+Inxgvbq5VZd0VjfXTMsn+ztZvu/7tQ/GzWNW/4SLUbDwveQski+VdXEMW5d38Sxs1eBeM9D1LxV4kgbUryS4trOJVt45v4m/3a5rU49fePXoYWUtIns+vftYfG/8Aao8Zab4Amv7qz8P28X2eK3ht12WNr/0zX7qs395q9T+PH7V/iT4Z+BbX4Cfs06xNpkaxQrex28Stc3ky/wCsmnn/ALv+zXgvge11D4feH4vCvh7y01LUtz3V591o4/4VovNDTTbP+xNH3TXV1K0t/fbtzM275VVqa5doy9fM0+q81W3Kc98RPEHxO+IHh2X4XaU9xHp91debr1xZu32nWJm/56t95o1+7tr0H4U/AfwN+zX4a0bx5+0Civb3l15uk+G43XzLpY/m+b+7H/tV3/h3xh4V/Zt+C8/ja80HRbTV1WP7Leax8z3E38McC/xf7VfFXxe+J3xR+P8A4uk8f/EjxldaxeTK0Vv/AMsoo4/+ecca/Kq1sqsFpCI44OrWn/dieu/Hb9u74kfFTXNZv9S1jTRbSW7W+jeF9Li2abp8O75dyr/rG21826hq2q+JtS+3+M9Vjd1+XzFT5Y1/uqv8K1u6L8O9Vb/Q0tlQSfNt2bdtaVj8EdVa68l0Z/n+6q0pVoSleTO2GVy25R/gzQ5ry1TUvD3i23dFXakPlfxV6p8J5viXBrEF54P1JtL1K1iZPOsZWXzG/hZv7tP+CP7Ob3l5aXOpWEkcLSruXft+X/dr9FfgD+yn4G/4R2K5vbONE2b/AN4iqzf7Tf7NeNi8RQcowZ6uDyOpKLkeAfCv4O+KviN+5+IUP9pX/wB77ZNLvdmb7y/7tfYHwp+BNnb+GYba5T7yfJHs+VlX5fu/3a6/4f8Awj0Twz4ia80rSo1ibb8qrXunh2x0m3+z6VNo8Jjj+XcsW1trf7VcVSpGU79D06eUQoxPmfxZ8Bb/AFazazttE+Vf4lT5f++a8g8ffCubwixe80yaVWl2I0cFfpBP4Y0ewgFzCAu5e1ea/GL4F+HviJor2cNv5LK7O3lv8zf8CrGpGMpB/Z/NGXKflj468B39ncfbNNtmeLeqt5zfNt3V9KfsE2/wv1jxNFZ+LfFrWbzbV+ztFv2rVX9oT4G3Pgu6EMMMjKu5/lTctaf7DdroM3xOsdH1m2hilupVW3kaL5pv9n/ZruwVb3vZ3PkMywfs+Zo+if2lLPxV8DdJj+IXwcmmitI4JEvNNhfZHeRt95vmr8qf+CvGg+FfjBryfF3RPD1vomqrp0fn2tvFt+1L/e3f3q/bv9qf9m7V/G/wb8iC8UfYV8+KaNs7o9v3Wr8av+ClHgebSfhfqXid9sU1jdLFLHMnzMv+zX0sYzjKMo6RPm8NU5a/LL4j8zVjdt6O7M+7a+6qklvMYTCXx5f92ta4ZJG/hDt/DUE0aLJwinb99q9mnKHIezUj7hzlxZ+Xu2Jjb/Ft+9WJfWrs+xONtdlcQ+c2zYuW/vf3ax9S03y8v5PLfwrW1OWvMjllT7HH38e19rj+CqfkeYT8nH96uhvNJSSQfuV+Ws64i2syZ+St4ynI5pR5TJj2LtTvTo4/LX/aX+JaszQ/x7NrbvvU37Om75+q10c5lGJLbq/y73bc1fY//BMbaNF8YKvQXNkB/wB8zV8bQt82w8/JX2L/AMEv33aN4xX+7c2P/oM9fpPhD/yX2E9Kn/puZ9Pwhb/WClb+9/6SzxD493Aj+P3i9C/3vEV1/wCjGrF09naQINwMjfeWtH9oVGPx+8YTRnD/APCSXSgev7w1kafN5TK7v91K+Lz6PNnmK/6+T/8ASmeNj/8Afqv+KX5s6bT1haQp823+Kt+1kSONETajb/kZfvVy2nq82x/OZT97atbFjdPGzP1Lf+PV5HwnD9g6Ozut032VIWwv+z81aEM0LQvMiYP3dsnytWTZt5cio+7fH99av28kPyud25n3f71HxESNC1j8tV3ncWTdu/8AiqWRZvLdJXw33kqKO587emViZXX93t/honk/dGFH3Ns+dmetYx+0Z/EUbyJ1489lVk2/L/DWZdKnlSwujP8AJ8jbttad5saQu+7d/wAtdtUrqH5vkTKf3v4qv7IRlyyMeSRPMZJht/hqtLD8xCblX+LdWlcQ7mCJHtZaoTske95tq/N/31WMoyN6ZWX5mWHzNoX7lMmCRt5Lv833ljalVngLJ5e4b/u1FJJuY5T+L5maolTOyjU9n7xnXkj/ADb/AJfk3fcqqZLZmKPuP8NT3gPlnejZZ93zNVC4k6h//wBqo5fsnpxxR1t0s32hdibW3/PVObZHJG8yMx3fw1p31vMq733FlfaG21VuC7N8iM25Pk2vXzvtI/Cfq2Hw3LHUrR72kd3Rfm+5tqeGONYx5xwP9+o2VI8og2v/AAL/AHafbzP52/5nf7vy1lKUz0qdGMTSs98kgR4cf7X+zV+OFJFHmdPuturNhvI42Ub95b5fuVfhk8uTe+512fw1yS5+fmMsVR5ocpfhaSWEbE2hU/v1fjaGGPztjbf49397+7WP9pcf6S7/APfNTWtwm37TsyzP8ys23/gVddKMn8R8Rjqfs5SubMciK3yR/N/B8n3q1LW4e4jjhdJP3nzq2z5a56yukb/l5y2/atb1nM8McTzJ91tybq6eY8LlNWG83xqjv833XWN60LVYW274G8qNNzqz/wDfNY1jJ5jMlsiru+/JHVqOaRm86Z2Qqv8Ayz+bd/stXVRqSlHlM5Rj8Rfkmf5P3LbG+Z/nqOa+gZShhVWbdvbNU5tSmZfJmdRt+Xb/APE1C3zNs87/ALZtXTzGUo83vE8cjxsI9mE2fLTFZFkG/n+Fv7tV1mjm3XO1vufd+792kW+2qsyIy/xbZPu/NSqVOUiNPlNSxjtrj53fYW+by2qzGvnbhtVdr/Nu/irLhuoVkRPP3qqfM2/+L+Kr6yQzRo8j4Mfzf7VeXiKkpyR10aMYxNWys5p5k2DYnzfdT+KtfT7cxr99mEf9771Zul6gjZmmmaTc3y7n2t92r0OpQ7ljR1H99fvMv/Aq8upze15T1adSnGlozUt4/Lbzkl3M33/3vy028muYV8mD5k3Lv/iZqitby5bcmxhJNEy/Kn8NL5jySIHTZIq7Umaop0+Wr7x1+0pypE1pI67blEjzu+9/Cq1q2do91JjfvZn/AIv4VqlYr9skRFRokX5vLX5d1dDZw2ki/c/e/Lv8t9rV6eHw8fiieXiMVy+6vhGWel+djZD5e2X+H/lpVqHSfLkZJpmUL83l7Pu1fs9P+0Rl5hwvzbf7tX7WxxMk1tbZjkf72/7terRw549TERMr+ybmeEO4+99yt3TdJaG3jm+xyeVv2o0bbq0tN0dIVeF33orfe3bttb3h3wy9vDjZuDS/e37a7Y4ePVHDUrS5vdM/S/Du3DpMzpJLtX/Z/wB6ty10FZIVtnfy93+qb+81dFpvhm2jt4dj7/4nWtjTdF87L7IQ/wDyy2/N5dbSokrESi+U4G+8LpD5UyWuDu/1i1i6v4ZdrgwmHzV/iZkr1abQdtw6OnmFvv7m+WsjXvDfl3Ucy/IzL93+9RGjynYsV2PJbzQX8xvs1tC6Rqu5W3bo2rn77SXjtTNNbMu1/u/e3fNXst54deO3/c221vm83/pov+1XMXnhuFoTNs2ltzPHtp+yidtPEc0eU8t1rTYZpNidF3bmX+Ff4a4zxFpvkys78q3y/wC7XrWqeHbPyXfY0P8AdVkrhPFWmpGux32eS+2Ld/Eq1nKMTf2zPN9at90Z2bfvbtzLXM3E3+lCHZs2t8y766zxRDsk3wzyB/4P7tcTqy/uzIXXK/M7VzezFKpAat5FZtvSH54327l+bdTl1SZXaOZ/m/g3P95axmvodzJ53H/fPy1A2rJc3Hyfw/fas+XmOaVTlOjhv4fMVE+7/E1TQ6hNtZPlTd9/5q5i21xI92/c7b/4asrqUca/675GT52+9uWseWXNzEe05Ycp0P25I41tndgdm7ctPbUPld3nZlX52/hrnv7aST7j4f70Xy1F/bDyL9/e7fM+2qjTjLY5vbe4dZHqUNvb/aXdpEkdflVK0YdQeb5E8wbV+Zo/urXE2usIoEKPiL7y7v71XrPVHW5SF33pJ8rLv2100aPL8JwVq3N8J6DpmpfKHeRiV/2vu10VjqUO6H5/kb+GvP8ARryHy97vHvV/vb61rHWE875Jm3N8y7q9alGMYnmVJHcprE0cT73V12bYtv3t26tFdWhtYX2XMcrr9zan8W6uGi14WapYJu+X5t396rMeseWqJG+4M235n3NurrPMlGXNzHp2n+IHvMP5ytt++zfL/wCO1rWuvW3ls8c2GZtzq275WrzLS/ESSAOm7zV+X7v3a2LHXEkZN/Lxvv8AmespS+0a0T0yHXJmh8yHcNz7drfNu+WtK18Rw7j5k2122713/e/2ttedaTrjlgkMzKrf3m+7V2bXEhkd9m7bFt3N/FXFUqcvxHp06J3c3iTzGCJNJEy/61Wb5Vasq68RXNrI0M253/3vl21yS+JN0aJGkm2P/wBBqG41aZo2Tzo9iru2s/zMteXWrRiz06OHlI6S58UPt2fKfM+4v+zWLqHirdbyokKj5/lZvmauduNWma33u6na7M3zfw/3ao3F8F+dLlkVvvRtXDLEc0viPQjh5RldGjeapNcR+dC+0SPt3fe+7XPatqyW9vJM9s2z7ryR/eb/AHf9moWvJo7hntpsIu75Y/utWFrl5NIqQzOyDd8m1/8Ax2s+b+U3jR+1Ipa9rEzffm3/ADbd1cpqWrPLHLsRl/8AHt1a2rSPcfOiYCvXPX3nW+XeXfu+Zo1raMuaVmYex5feMrULj7VGEd2dv7tZsOm3EjPsdW/2v7v+zWncbJpMbNu35vvfep9rbu0Ox0Yru+8qfeq/acsAjT98y4dLdpD2f/Zra0HSpmkZPmc/dqW1052ydijd/eWtvT9Ptlii2Q/7O5qKdaHOaVMOb/hez3NsRGRliVdv96vRNBt3t7XZvjCQ/MrRp91q4zwzp6Mo8yRt7ffk3/xV3Ogwo21E+4vy7lf5t1ejRkeZWp8sDtvDawtGkP29V3fPuZK7DR1NncQon3WT+FK4zQXht49gfcuz7y/xba6izuiY1+eRFb5ty/w/8Br0KcpcpwVKZ22kXyBURPLDN/D/ABV0mj6lA8Y2PIjfw/Pt3V5/pGrQTW4m2fJ83zNF826tvS9WSNUtYUZvL+4y/wAK12wjzHnVNj0W1vHtWzH+6E3y7l/hantq3kLLcw3MKvH8v+181crb6wkioUuZGDfws392pV1xPM+e5XbJ821q7Y/AcHL73umjq14j25R9v/Af4q5TWLqG2Evzq/mfN5dXLq9+0K009zkLuZmZ/l//AGa5jXNWRpPO2xoPK/iXc26spbGsYyMrUJ3ib59qjd8sa7vu1g6jJ/f8v5mZ5Vq/qF9ukWFJmf5/vb/u/wC9WPcfZlXfNI0Uyvt8xW+9XFU/vHZGU+XQyNQkkmZZrx2wsX3o2/1bVzusalDJHveZvlTZLuRl+atfWr547zZczK+35fMjb5V/u7q5DxJrDx24hL+aVRv3LP8Ad3Vyeh00utyvPKjRyeQ+Nv3Gb7u6sDVr6FpCJpmRm+VFX5lam3msbm2b5HX7zsq7ttZ91qEM87Rl4xt/irzcRKNP4juo8nwiRzTSMyJB5qKvz7vl+Wp5QmwP8qfxbV+7WbHcI8jb3UK38P8AtVpWrJNMEd9+2LbtV/lX/arzanve8ehGMRNqSfuYfmfZVL940Zd4413P8u1dzbaszSQsk32aRnSN/wCH5d1QNHDGxzcL/Ez7fvVnT68x0R94bH5LQna+9F/vL96kjtnWQedDIis27dJ/DVnTbVGZs/L/AL1TxokNx8j4WT7+7/lo1axlLm0NuXmhqTWipDYv5KM6K2591TWcabtjvsVl3J5a/wDjtR28e6HZ1Zf4d/y1citYWVIX+RVT5tv3qPacoRpyY638ldPjtkdS33vLkb5ttTx/vLxIUs8Nt2+Yrfw0yzW2tvnmRVZf+eifeVqsx+Yqw/Zk2+Z8vnVEZfFYrl+0QTNDHux5m/7v+y1el+HUB+FuxYgAbCfCYx/frzq4t/MYeSGD/e+V/lb/AGq9I8PxhPhlsxtH2CbjrjO6v2vwOd86zD/sFqf+lQPe4a5vrdb/AAP80eWR2vlxpZzP/H/F8u2s3WIdrfOi5/8AZa1mb5lm/eNKv3tq7lZf9qsy+t5Y5d/zMi/L93atfhk583MmeRRjGPunL6lp7x7k+VfMbbub5ttZs1ukzHY+1f8Ano33d1dHq1nHH1T/AHKz5rWHzGjtoWXd/Cv96uf2sY6nZHDykYclrtVke2Xa33938VUbousghd9jN9xa2ZmtlkXEPmfwsv8AEv8AvVj6lLbRx74XYFfmT+KroztU+EmVHliZOpLDIz/ufnXn5f4a57UXdZHQn5V+bbW9qU3y70K7m+bcv/s1c9q9wNr84Zk+Vm+7Xq4fY4K1M5+88xpN7purJuGZdybPvfxN/DWlqCOqPMj71X+Hf/FWZdM8e55h95K9Sn72h49Sn7xXX95cDL42/L/wGtXSYx5gOxvl+XbWbD500ibEUsv39tdFo9pj6Sf7FdPL7gUYzlI3NJsfM5+6yt86766rQ9NS4w/k5VWxtasXR7GGVfn/AIm2o1dloenooZ0C72XbXJU7M9mjTlze8WtLsEkZ9k0Y+fau7+9XUabo728afJ95Nybl3baqeHbcQqj3McbBfl3NXV2FmkjPJDcq4Xb96uOpGXxHq06dKUYpEOk6X5ylILZstF95f71emfAXwimreLre21W5YLuXfcfd2rXKabZfZ7h3jmZG+4vyfLur3b9kP4U63488VWc3h7TY79VlXzY2bb827/x6lHlcRY6MY4WTP1u/ZK+FOm/DP4Z6LDbbrq81KwVrJZF+6rfM25q1vGEj+OvHiTWFst5pfhtdlrb26/Leag38Un+zHXGfAP41eJ9e8SS/DeGzaKbSdNaJmX/l3Xbtbb/tNX0V8K/CPhfS/DMNhYRR+YsrS3En3mZvvM1cMv3kryPzapzJyPOND/Zr1KGFdV8SXLXVxskuNXmb/VLIzfLHHu/hWvnX9rjwb4vvvM+HulJbvaK6tcafp6N5cO5vl86Rf9Yzf3fu19SftCfFC+1vTIPA/gIXn2mSfY5tU+VV+7ub+81eaftlfEzwv+zP8K7fTdHS1PiprJVih3+Z9jkZW3TMv8Un93+7UuVKNKXY68LRk6sbbn5i/Gj4av4T1ObR9YS3udXbd5sMO1fssf8AtKvyq3+zXg+gfC3VY9Yge53QrJP/AKU0nzMq/wCzX0BY69rGrLI+sbUnvLhpJ2kXczbv9qsK6h+2X0eiWz7ZvN3TyMn3f92vmamKjf4T7/C5VOlh+aRw3iLwe+patPqttZRwQw7Yk/vNHt+Zqy4/Elh4Z1LzrnSrd0t/me3k+Xc235a9Pvo7DQfDGuGaFmnjt22M38Tf3Vrx3VtB8YeMNHm1u20qOB5k/wBW0u5qKdT23vIwo4flZ4r8ZvE/xI+Nnj648YeJ5ldY38rTbVflgs41/hjX+Hd/E1ZOk+DfEcbxubbaFf8AiT5a9T0P4J+P7qF5byzjTyZdreZL91q6qx/Z0+JbWsVzYaUt5u3b1t7jdt2/w12VqyjGNmdeFwspu7OS8A+A9Y3R6k9hJcS7/kWNl+b/AHq7nxNZ2ek2qasmiTQyKu6Xcn3f+BVZ8N+EfiLoOqeTdeErqFI0/wBX5W7/AL5rtvFmueHpPC+zXka3favm29wu3buryK9aPMe9Rw0eXmRjfDvx/olnshunVE3q21v/AGWvvb9lXXE8SWdto9nIyJIqq8lxtb5f4a+Crz4d+Etb0m21XR7xVbfuT7P91v8Adr65/Yt16aOxSO1n3vHt/wBcm1v92uLESheMkejh4ycHBo+0ZdP8K+FbX+1tYufnX5XZV3eZVvwT4i0r4heJjo+m20zJDtVty7f92l15/wC3PBdnc6rNa/uUVpdrbWZqT4O3GiaP4gj1j+1rWPajOkbS/wANdcKlKP8AhPPrRnGlJxjqe4W/wlbULBJgm0bflWue8Y/DK+0O3juAjKD8r7a73wF4+s9ejCJqNuyBtqqtanjHyrq0XO1l/ir2ZYfAV8LzwPi6ea5nhsdyTPi79pb4dvq2gyv9m+aGJmST/wCKr5n+Bf8AYnh/4sWb6x+7aO82xTL/AAtur9AvGXhWw8WCWxvIcbd33fvV4P4T/ZB0q18YX0NzDcT2011vguNu3y23fKteVhYxjV0OnPeWpSjM+x5YLZvhqNE169WeK5sNsdwv3WXbX4x/8FY/hzo+tf8ACTaDePNHpWl6XNcJJGzfvLr70Kt/s1+vXg+K6+Hvga58H+LTJdRQt5dq6/Mvl7a/O7/gsN8LZ7z4J+J/EPhW5ke3jtfPfy23P975vlr6aMvejA+AnKPt7n4GrcGTyxc7fOZdsrf7VM2J5flvt37/AOGtW+0/7LuhdMP8zfd+bduqs2mtIV2bhEzfPuT5q9eMoQ91nurmqQMy48mdtnl7f93+Gsy6skWOR0RifvJ89b0lqnmL5e1f9plqrdWqFmR3VQ3/AC02U4ygOVPl3ObmtfOV1dFx/svWVqGmw2+R975/4v7tdXNpvkwtDs+Zl+8q1mXGmzLG2+Fm+fbW1OpKWpyVI/ZOXuLeCNy/k/xfdqpcRw7nfZW9dafubY7/AHfl21m3MCRs2/cq11xlzHNyozWj+benT+OvsL/gl1uOi+MmOMG5sduP92evkSZE3b0Rifu7a+uv+CXAxo3jMbcf6VY/+gz1+n+EOvH+F9Kn/puZ9Fwj/wAj+l/29/6SzwP9oyZ/+GgvGK7sgeIrvj/tqaxNNuPL2JN0krZ/aOwfj94yOSCviW6/9GGub0+R2XYzt/srXxmff8jzFf8AXyf/AKUzyMf/AL9V/wAUvzZ1Oj3SNuRHw38DfxVu29w6yLDs27vv1yelzG3l3p81b1nN5jK78bvvN/drxvfOTl5pnSWl4nl7HT5l+V/n+8taVjcfJsSFflf+KsG3mh2+WduWb5P9qtXS5nkYxv5itu+9VRlH4jGUZmxbt+73zR/IvyrJ/FUMlxM0jOkfH3tzJ95qYskm9Rsbfs/75pZLh/nhO5F3fw/N81aR96Bj8I6WaaSMom7aq/eVP/QqryxI20P/AMCqeN5mZk+Vxt3eX/E1OjXd8kPyVUZcxPL9ozJraG3XeifKz/w/xVnXUMO95Htox/drcvLdFtVfYo3LuTbWXdL8q7AzL96plI1jyGJcQozF0P8A31WddSeYp4kEMbrvb+9W7dW7qGfO0N83+zWPdW/mK/f/AHanm5jojLlMy8m3/P5mTsrIuroN877Xdf7v92tPUI0jU+TuG35X+Tbt/wBmsS+XbJshfaf71Ryx5jXmker3lr9nk3pueJfl3VmzW6TM2zaF/grcuLdFHnHcR8qbW/hqo1rDJH/CN391a+PlL7R/QcY83wmTHYuzLM77gv36lW1SSRnhhZSvzfLVo2b+cSnzfd+an+RNC0SeSzOzsrt/DWHtOY648kYFdWeFUR9uG/8AHqkt5nikOxNoX+9822nL5xjy6Kf8/epm5GzD/H/epx973ZHBipR5fdJ4bi5aP9zNHs2Ns/vNVuHZJbNbI7P/ABf7W2qEbfZ2xN827/x2prW+e0be78L/AMtP7td0fhsj4fMOXn9407WSGFfJRGb+H7ta+nq8kHzpn+78+2se1mfcr71/3lq5b6hN5j7JsCRNqMq/LWrj7uh4EvdmbemyJ8qbFRt3zMv8VTLNNJHI/nLuX+L/AJ6L/s1nW/7uz++2/ZuRtv3quBPLg8ya5/g+ZWStIS5dSOX7I+GRI4XSGNgmz7rPVeS4+ZPOYsd/yU6Tfuf7M6xFv4WqnL50kjuky7fK2vC1dPP9oxkWbjUElk8l32t/s/dWoFvILyQJsYfNtX978tVmbbI6Kioqr8zN/FTI7xN2+Ty97L8jfdWueUuccTY+1Jb/ALlJF/dv8isv3mq/p9x84+eNh/sp8y1z6373EiI6Kr7fmaN6sW00KyK6bi2zduauOfNy+Z0x930Or02b95++mX5f71acepTKzBEXfs3Purn9LbanD7y339yfdrUhZP8Alt137t1cXNzTvI6YxlGBuWt8hhUIJF3fL5i/w/7tWVmSaNfJRti/Ju8373+1WXayJH8+xTtXbEy7mbbV2Jk2Lvs2H8KfPt3V1UafNL3iKlSMYmxpLNMqTecrPHtX5vvfLXXaDbpMrv5Ledv+Xb/dauP01vmVEhVNz/Kyp8tdt4fXzpPIRGR2Vd/l17mFp+6eFiqkoysdDo+mvIzb3b5flZl+7XQ6TpO1o5tmxGXd/stVHQbXdbxecmGh/wCeb10liqM4f92rr8u1Xr1KcYx+E4alTlLuk6D8rPDtQSfNu2LXS6X4f+yyKfJWUtF8q7/u03w3Y+XGyPDH8q/LG33mrqNL02e4bzo4VRVXay10RjGJyc5FpOkww42Qq+77m193zfxVvQ+H08xPJtlZ9m6Jn+XbV7S4YYlR0h3SL/dX5m/vVqRqyjyfJkD+V/q2Sq5UHtOU5280VPtD749n975K5/XtP8m8EM3y+d823+9XeXGzy1eZGd9jb/7tcxrlrbQyhNjFNu7c33aj7ZpzcxyOqWaQ7vOudqeVv/2v92uW1eOGa4a88r5FT91I33v+BV2Wp2brIiJzDI/zyKtcv4gjdZzs3bpPlZm+78tLlluddOfLM4XXo0mh+SHarJ/F8u6vM/G0dtaxvNawqV835tteo641tcb3vHbEbN833a8o8YL/AKU6u6tu/h+6tTLk5Top1JnmnjCOb7P+7mjHz7vl+9trhtek3bofP2oqbv8Aers/FVwlx5mx/nVG3bfmrzHxRdP5hQPzXJyzqG0sRFR94yNU1b7+z7y/L8tZNxq0c0b3Jm2Nv27t1VtavX3702/7y1h3GpPu2O/3f71Vy/ynDWxHtInW22uBdohfa6/Nu/hqZta3N+7fb/7NXFQas67k3/K38TVet9Q8xvlm2bfm+ap9nAx9tI6ttY2YdH3Fko+2Jw6df49rVzK6kYlb+PbUi3ySS/I7f3qIx5ZGUqkpe6dPb3m2RpoX/eL8rbv4a0bfUtzJdO67l/4FXI2eqQtHu3/8C/2qu2epTSOux9n+y3y7q2jH3zM73T9akVkm+8v93bWo2tedHvFyzL937u3a1cTY6g4VUmf52+atG31abDJu2p/erqicnxHZ2/iF5sbPLYqvzM33VqVfESBm2ffX76/3f9quTh1CaPbDH/wGRfu1ajZPl+zTbG/iX+8ta+hh7M7bS9YmkiWGafcjLt2r8rf71bVnrT7kh3yP/F/eX/ZrhrGbzFV3vG37Nrs33VrbsY7xIUe2m83c6szMv8NcdSpynVRpx6Hc2erQx2/2lOX/AIlX5ttWl1yaSETfM/z7f97dXLWN1cw/8eyfeTczL97/AL5rQtdShjhDo+2H+Nm/vV5WIqcsbnsYWjzStymxeeIEjbyYd22Ph2/iqncaw9rHvebCyP8Adb+9WU155032lHXZuZdv96oWZJLN7ab5BG3ybf71ePWxHNE97D4X3jT/ALSe8z9pj2+X8sSr91v96oG1SaTb5235f73/ACz/APiqprdO0QdEXYr/AL1f9mmTXfmMsMPzLs+RtlcVOod0aMfsj5Lp7iGWZ3b5k2/LWFeN5jeT80W7+983zVozXFyI2tt6hG+4zfxVkXjfudm9lZvl3f7Nb06ntNEYVKMY7mdqW+H9z23t8rP91ayLqO5uPkSFmRf4f4mrQuriFoU3fvfn2/NVW4vljk8mGHyjt2tu/vV2c0oxujk5feM37DuZkRMNt2/MlW7PiH/x35aYs26Yp8su5fuq3zLUsLPb3C/Pt2/cqJT5dB06ZetVh3ryq/71aGn/ALuVd/3VrJ3PJIyTJ93/AMdrY0G8Ty/JfzpRHu3tIn3qIRlH3jWUfaaHUaDcJ5ao6MzK27cv3a6zQbyQTNInzO33F2/LXD6bcJGyI74Vfm/2q6Wx1J9ypvkEvy7GjZfu162Hqe8eVWp+7ynfaPJbfZ2dHZ9z7Uh83asf+1W7pupTRstz529lT7rfxVw2lal5kZmd2V12/u2Td/wGtnT7ry1KJMu35v8AZr0adQ8ypR5TsLXVPMs/9c0e19rrIv8AF/s1r2uqXkEYvLOZndfllVotqrXFQ6nthE/ys0fysrPu2/71Os9amaYyC55+VWZq9GnLuedWp8x6FD4lhgaJIXYFlZvlT71Nj8T/AGj9yjr+8f8Ah/iWuGbxI9q7wWz/AC/xs3/oK1HJ4shUqnnMiL9zbXbHklsefKMIzO3m1yFrf7TC7AfMPJ/2qwdY1wrCu/gs3+sV/mrm5vFO3c9n8vz7XaSX5VrMk8UwtDKlzMvnK21l/haoqR5dCffl7xs3esJIX2bnC7d395v9qsbWdYe32b3XzP8Alrtf5dtYN14qgt3e2S5jV2/h/irBvvEk1xGzb1VY1+dt1cdSPNLQ6acvdNnWvEENnHNM8ykxv/C33q4fxDrk0k0ib/l37kkb5t26q+teKkkDvNt3t8zMtcnrHiItN5KBdn3k+b5lrgqfynZHlkbtxrVtZw7/ALTvZv8Almv/ALLWVeat5jApt+Z6xJtS3SI/nZX+61Vprh3kZ4Xj/eN97dXBUj7T4jqjI6i3u8Ks29Szf3flq3a6lJH8+/Yfvbv7y1ydvqEyxKnk7vn+T5qnk1Sa2yjzbdq7vm+9urilT5Ye6ehTqR925uyaqk0b/eZmfa275flqS31NGXzkto/m/hX/ANmrn21iZtuyZU8z5k3U+HWHaSN0Ta6/e3PtVq55VJcvwndTlyy1OvtdQmkX54VTc/zMv3q0oLy2jkV0Tdt/4FXK2OuQ+YryXK7Gf/V7Pmq6usYjeTYqqv3W/vVEeaR1HQxyJ5kSIjH5fut/dq/tcXSbPubPu7/mVv71YdnqXmbd7rhU+dmq/Y6pDcXH2YoyMy/I237vy0hx97c1Ifs3lt5jxjci7Fk+arUMHkqIUdX2oyuuz7v+7WRbt5eyH5Svyt8y7q1GZII9jo21fmb5/l/2adT3fhJjT5viGyabCuy5+YfPu2s9ej6AGT4akO4bFlP8wHXl686mmS6YpDuRFT978/3a9G8PRmP4bCNn2EWU3zD+H738q/a/A6bedZhf/oFqf+lQPo+HKThiattuR/mjzMxww2ryeTMrN/DUN1H50ex3b5fl3L8ys1XZLia8t4kTcwVdvmN8u3/aqhdM/l+RDuVF+ZGV/wDvqv59qVpVDmo4eFMxL63eRv30zBI/l2r81ZV3G8dw/G7y/wDVbf8A2auhmjSGR7v767dvy/xVg6pbTNDvcKCzLuX/AGv4amNSPNytnpU8PzR+E57ULiVpG+RYgrsrN/s1iXk3kuFd1y38X8NdBqNu+2RCnz7sfN/DXO6pGjcPtTb8u7+9XfRlEKmEjuYmsXDyKbeHais/zsz/AHqxNQ3sp3uuV+Xd/DWtqkfyKUm4VtqN/drFvmi2jf8AM/3Xb+GvUo+8eTisHLm90x71tqt5Nt8i/K7R1m3ioU/2v4a1Zmdd+zbsZfu1lzInmb3/AIW+7XqU4njVcHyyE02HazeTtb5/u11Gg27tlHeRtqfJ8n3VrG0+F4nDui/c+bbXU+H7fdGzvMxGz+5XVGXvExwvvm7o1v5Koj/OW+589dvoduk0LPs27fvqtc34ft5gqOm0bf4tldvodq7bOF3f7X/oVRWl7vMethaMZGrpdhbeXGnaSLdtZPmWun0nS5oWbeiqJk/1n/stZWiqjXCQ2z/Oy7Xb73y11Oh2VzGzpM7OVddjL/drhlzSPSw+Hjct2tn5cn2beu3dt8tX+Xd/vV9A/sg+IpPBPjCwv4YftU32jbFH91Y/9qvErK1s7gpNbQ5Lf3v/AEKvU/2fY9SXxdbPYbXXzVXc0TbVbctZVPdIzTD82Dkj9UPhb4f8K+A/BOr+P9Kud2qas8lxdXDRbVVW/hX+81dp4W8Za94f8Kvq/wBsbdJaqkULL821l+Zq8+0rxtrGj+C49N8SQ27XF49vE7bf3axt97av92qnib4gWzalcaPol/G6R3HleTC3zR/LXm1KnN7p+Zxp/vfeK/iD46P4D1aPUtEg8/WFuvN+2TS/u7eNV/55/wATV8RftLftA+IfiVql/wCNpr+adpNSkuPMkb/Wfw/NXrfxz1y8s7/WrmbaIbO1ZUXzf9Y235trV8m/EC8/taOysIYmjT/WxKv3dteZi4Q155H0WT041KsTJh1vxPfTPcpcyFW+Z1Z/u7v4Vrfsbi5Wa33wrujRv3itVLw/Y+Zbx22z5P8AZT5lrtPA/gua41KG2s7NZY2fc3mfe/4DXzlTEUuX3T9Fp058nvGF4ivtV1ZTYWGlSNbzNueSH5mrn1+Cfxa8SWKXL6lHo9lv+S6vFZfOX+Kvqe88E/C74b+BZviR8QtTjsbGxTfLH95rhv4Y468d8YfGLxb8WNNi8W63pVn4c8G287JYfal23N5H/u1vl+IpRjKLPPxWFlTfMtDw/wAVfDHTdDhTSrP4/XE100StKrRMqszN/wCg/wC1UvgnwX480WZI/DHxRsZEkb5FuL1o2Zv91mrK8dfED4Pw3kzw6VCgVtssi3DeZIv/ALLWDfeOPhXqlu6aR5ltNIny/vd22niPZyj7pphZOnLnke9Wev8AxR8M3STeJPDbXMcLqzSWvzbl/ibdW/q2peG/iF4Ru5nsLO4h3Ku26i2yx/8AfVeM/CX49X+k3iaVN4umu2hiVU+1bV/75r0Tw78YvB+rR3OiaxZQzxzS7kuF+Vl/vV5EuenP3T6KjUo1qRt+H/hn4Y/sWGawS4tfLf8AdLDtkRmr0j4f6TqXw71C21Kw1u4htm2rtWL5mZmrmNB0XwfcWkL+FdSurdJG/wBSs+75v4vl/u133ibxI+j+HdNsrnxDH5TXmyJVt/m+7/eqJS5pe8VGPs5H0R4T8RaDqnh1LbU7m6kuIVVYlkl/9Crs/h7oqX2oRzL9lCTPuX5l3Kv+1Xgnw50PStWtFv57+a4juIt3+tZdzV7f+zvofh24m87zt6Lu3NcS/M1VCM5T5UKtyRpSPpTwCulWumo14kburfu/n21va9rN3b2EjWc21JP+en8NcXpzeDZzHZwTW6vH8rLHPUXiH+1LGxl/sLU/MZdxSO4fcrf7Ne1KoqMOU+Lng4V8Xzv8SbS9VFzqkqxPld+167f4aWNtqGp3KXNvG6KnyqrfxV5HpWpXKyGa8mjhmX5pVr0v4ReJHW7CfKyzN8zLXHg8VGGIi5bcw8/wMlg3ym3400NLXSp7ZBny923d/Etfmz/wVA+I2n/C34d6lZ+IZpmsdeiazg8n5v8AWfLu/wCA/er9O/ia00OiPc20G9/KZdq/3dtfih/wWy+MP9vXkHwom01ZraGy3/ao22yLN5n3f++a+wVH967S0PzKNP2mIUT8tPE3h1NF1ibR7O586GJ9qXUn3pFrNm092KwyP89dVfaLtuij3O/y/m/vMv8As1VTS4VhV9nyr8u5V/hrr9ty+6fVUaMYwOWmtfL/ANGSFtzVRl0lNjJ8qjf8q118mj7ZGMyMyN8u7Z92qs2kl5CnkqqR/KlEanu2iP2PMchcQzQ/uUdSG+4rLVC8sX5eNNy/3WrrbrS3+1fP8rbN3l7Pu1l6lp8Z+4ny/eaumnU+E5JYeMeaTOJ1axRN2+FW/wBqsK4s8A7U+b/arttYsbYLsfbvZG3LXMahawqzp8wVf4v71dlORw1Iw6mDffd2Oiqf4WWvrP8A4Jehho3jLOcfabHbn/dnr5Ru49y79n3m27v4q+sP+CYMaxaT4zjXtdWX/oM9fqng+78f4T0qf+m5nt8Ke7n9Jf4v/SWfPn7SEu39oDxlC/3f+Eju2/8AIhrk7dkWVPn+9XW/tGr/AMX/APGZ+U/8VHdcf9tGrj7WRFk8z5T/AHK+OzyX/C5iv+vk/wD0pnjY6P8AttX/ABS/NnQafJuby3/hX7396tfTpN2Pk3L/ALX3a5eGTlXP3d+7733q2tNm8sId/wAyvury/fOXlOmt7j5n/fMh+9WrY3TsvnI6qW/hb+9XLw3Dqzl3+992tnT7h1Yfdx91V2VEveM5ROnhk85Vm2fw7W21L8kkPyJn/gf3ayLe8RlZ8MqL99quxzIy7IX2bl3bquMebYwlEsq0fmb5vl3fKn8NTKyeSsKbt0f3t3zbqq28k3k75Pnf7u5fmp8Mjsw/fcbNv+9/tVfKjD+6Pnt8Rp++VdqNs3fd/wB2sq7jcR7Plx975m+9WjeXkyv/AK5cL95WrMvl3Tb97Z/8dVaZZn3TJIwRE+RU/wC+qzrqNI5vItk+9/47WrqEh8z53+X/AGU+asm6fd9//Wt/tfw1MTaJja0tyu1PlZN/97c1c9qW9fuD5mf/AJaV0GoO8at/C/3vmT5WrA1SHG15H/4DUSiax2Pari186RoU+9/tf3qg2/u40d/+BKlaq2e64OxGI2feanSeTEvzp87fKrbP4q+Fl7x/QGDqc0DFa3RXXenzSfN5ar96mfZUmUeSkn+xWpbxzI3+kpG3/jzbabfWPlvvSHaqpuT+Go5oxNvaMxWt03vC+5N3/j1QSQvtVf4FbanzVpXlnub+L/gNVGXb9+Flb7zV0KVzkxlSHIVZLjbuR5MMzbWoWYxt5P2fcNv3mf5ahulhhbek25arxuVkd0dXX727+7/s120o8stT4zMKnMbtlcedMm+ZlVU+6v3a0obx5Lcwo+z/AGv4q5zTpH2h+7VrWbPtP2bbu/jZmreEYx1Z8/KU+c6TSbiZpGT5U/hRm/8AQquXH+sfzkZDsVU/76rCTVtqi2mSN9vyrtq9HqFzND52xVH3fv1EZT5tRSlzaF+ZYcv8izM33tq/d21R+yQzLK6blX7qbX+9RNqDxw/u3yGfbtVvu02PyZ1Z0fay/dp+/wDEEteUGWPc0m9i6/eWRf4qpNHbNvuX+dd/y/PuqzfM6yLNJNv3fxLUK2/ys/kqC38LfLSjKQL3vhK0d9tVoXRVZX3fMtaFnfIwZ3hVf4fMX+KqsduJ2Uum7cv3d33amk8yFRGj8fe2rRKMZe6VHnOj024eRf3KeYzJ/e21prcfZ1PkupZv4f4VrmNPuts0saQswVdz7v4a2bPY0aB5m2x/fb+Kud0ff1Or2nuWOhs7uGE+ciMq/d+WtNLtJFSzhRnK/Mm2sOxWa4+REUo0W5Pl+Zfmrd0+WzjiCJtfb8y7f4a6adLlncxnJVIWia+myTKrTTJzvVV2r92uv8M3lsu/fufcm3c1clpW+OL/AFO91Tckjfdaun8NyfaNs0yNEq/wqv3q9zC0z57Ec3OegaDM9zCNjxptbdKq/dauq0G1tm3XO9pIm+bbsVVWuF0uZLVY4fIWNGXcit8zbv4a67RrqZpbe58za33mXf8Aeb/dr0adP7RwSkejeH4/O8p0f7ybUX+9XZabawsEtk+QfK21V+9XE+H7jy1T54ztbc6xt8q13nh9vtEf77yzKyqrtH8zL/8AE1rGPLEn/CdBo9n5Nr5Lopdmb7v3dtW5l248ubLKn8TfNVeGa8tYV+fP+z95d1WZCjKX8jY2z96zJ96o5oyKjEqagqR7kd1y23Zt+61cz4gjS0j2XLspaXcvy/dauj1DZHH5z+Yd3zRR7fu1jaozRw/ImWaLd83zbaxlLlNIxOV1hUuml/crCm75FZf8/NXH68sMgEqc/e2fNXXa1CGuDC7+YN3mbo/vfd+WuN8QSQwq5d+d7SfMm3d/wKsuc3jznn3jC68uGaZ9vlbN21fvLXk/jpvMjaG2RVRdzRN/Ev8AwKvVPFU3mJvtodu5PnVfutXl3jC3hjjbZbMsvzebub5WqObqzX4fhPKvFKeTI6JuzIm5F2/erzDxRCity+CvzOuz7tekeKP3kjoiMpX5X3NXm3iCP/Xec+7bu2L/ABUub+Uzqe8cF4imdY5dm37/AN5a5ua4/fbH53J81dF4hWZf+WON392uUvF+zsfm3v8A3a2jyyOWUeUtW93tYo6ZVa0bebdH8j7f/Zq52GTdJ5KDFaNvePGqoNu3b/FWkokRkasF4jbod7K3+zUkd47Mdj/ef7y/3aoQ3Wfvj71WM7vuO3y7ay/xBzSNKxutuzyvm+Xa6slalnIkapM6K53/AHawre5RWWXeq7vlT+9WnYs8f39vzP8AIy1UdiZRN7TbjyFMexfu/wATVpWO+SPjcu59y7v4ax9PWFtvnD73yu1a9nN9onXzplfd8v8Ad+7R7QI0zTt5PM+ffkL/AA/3qvWtr50/nPwsf8Tf+y1Rs4xt2JuRa07ePZIg6IrfLTlW0kyo0zW09Zljih/5Zt8u7+KtuwaaFETep2/3X/8AQqx7P95H8j5WP5XVavxzMg8lHX5trLuavNqVvtHdRw/MblvqEy3SzB13r827ftq39qRd3nP5r/wL/drFVnXZNGy/3fl+ZqveZNMpeEL8rqqM38S15OKqHvYOjJF9Lj5Yk2bVb5tzJ/DTbiTbIkKbmf5m2qvy1VhZ23o42Ps+Vd9NW6muFD79zsu568mpyyqns048seUluZpo23w+WnmIvzbvlaqlxff6O80M+/dx9yo9QYMv8OGX7yp/FWfcaj5sapZwNt/ij3fd/wBqnTlt5DlHlkTtqj/wJhVX7zJVeSRHs9iOzbU+XdUdzsWZEh2/7W56q3kkyqzzI2FX5mX5q6Y8vN7phKPNEgmk2ugmfL/88/4apX0cM0ju7thf++d1TeT9oVXhmb5fmRv4qrXVi8dwqbGK/eZa6pc3wnHKn7pRk7TO7JtfY9WIZJlVkMzMq/Lu/vVNeWLzLv2bAv8ACyUn2eaPYibfv/3flo5eaMSffiTWMKK3yPv+fc6ru+b/AHq0bVbZvkR2iVf4W/vf71Z/lzW7s8PG75dy/dq3ayIbcJ50gl+ZtzfdpKXKXGJtaTqDr883+sVPl/4FW9p1x5OxJpm3Sf3U+bbXKW801ufkm+ZV3Ju/irSt9QS4eCZEkRP41V/vV3U5cxzSox+I7bS9XfSZUSZFZZHZfm/hrZXW9yqyXK5k/wBn+GvOYfESMwSdGYq/7rav3a0ofGEzf6HNMpVfuts+bdXo0ZHnYinGUTvl162WfZbTSEyf7P3qjbWHjjd5h8iy7dq/3a4638SJNImybDLu3Nt+VaZN4mRV/fTfLub5d33mr0acjyalM7bUNYeaPZZ367PvbVrNm8Qf6QzunyR7d9csviHTWmVH3Kjfek3f+y1BJ4ieJtqFZWm3N8v93+HdXRGpy7SOaWH5jevPEkPmTfvt25/733VrNv8AxNczKUebZ/FE2z/0KuevPEXzMjxxmWP+6/3qwtQ8SIv7nfIYv7q0qlaPQy+r8pval4qfZvR1DL8zrs+asjVPEUfktbQzKzb/AJ1j/hrmNQ8SbY9jupVW2uzVlXWseWrQo+3/AHXrmlUlzGscPy7Gtq3iCWNfJedt395U/wDHaw7jUNzMiTKq7/kXfuqpNqTyYTf8y/wtVSaZ4/nwu1nrlrSlI19lylxb658sskisW+b/AHqkjmfzN/nR/L8ybvu1kLeOkbTed8v+zUU2qOzDY/LcNtrm+L3S/hOguNSmZVm+X+79+j+0pto+dUaT+FqwZL4zL8/y7futUkdxN5i/6tv9pvvNXNKX2TpjLlNuPUnkkV5E+RV+epmuvNY7IcbV/ibdurGjvEkUQvDz/vbamt7r5UT7399t9YyjynoU6kZG3DqFyjJ8qsi/N5n/ALLWvp+qPt2bMf3JK5iNfm3puI+8vzVbsL7azb5m+b7sa/w1zSjJHZGR2djqD7t6TfKq/MqtXQaPO6wi6d/vRbdzfxVxWj6nuZUd8MrfJ8m6ug03UvO3Q/ZlO197/wANYylM2p0+Y6K1u/Lj+R2xG3ybvmatGO8fzF+T5Gfb83/oVY9ncJfND88cUknysv8Atf71X4ZPMZIXRW+f5v8AerHm5TaEZy+Iv+ZNuTftfy/vN/Fur0zw65f4Y+YV2E2Mxwe3368sfEjRI/yv/ufLXqnhlU/4Vqixn5TZTY/8er9s8C23nuY3/wCgSp/6VTPqMij+/m/7r/NHnt5H+5itn+5Ii7v7tZ8kMyzSp5KhI22r/d21qSWb3CnenCvuTb/6DULbPOh3w/Kr7Zdz1/PkqnN9o1o4X+6Y95buWNtC+xmTzfl+6y1i6hIixu6bR91nWN/vNXRX1u7M+xNyK21v9paytYVIdsH2Zl2oyp5f3v8Adp0/dPVp0/7pyGuRXMzffkVY2+Zvu/N/7NXO6sfLb7NMjJt/irq9Us90n2l3ztXYism5WrmdS86Ni820p/drvo8vxGv1X3DmL3ZIzIgVl3bflrJuo+S/3Ntb2rQpG2P4W+Xy1rKns3DSfuWAVflr2cPLljc4K2D5YnO3lmlwz7Jtzbty/wC7VWOw/wBKeR/+AVrzWe5m/c/w/dp32fy4N8m3/YbZXfGpKMeU8epg483NIi0+zSZvkTCr9/d/FXS6OszRjeioW+VmWsaxhdFX523b/wC58tdFpMflrsRN27/b/hraNTkMJYXlOi8OxoNls+4r/Ht/irudFt/tHluiMzxoq7WX7v8Au1xuhyOrIyQqhrufDLPJInd2/vfKtVKXNE2o0Yxl7vU6fQbONVLwwySvHFuVY9q11ulRzeVbzIm3+J1b+GsHQVSSNIYfLZV3bpN38Vdbodm81uj+Su5fmfa+7dWTX2melTpxL+k28zWvz229G+b5f4f92vVf2f2ez8XWSeR5paWPyvMT737z7tcFZ2MK2fnbN7q/7j59qq1dz8KbeaHxZDNYW0yXEm1U2v8Aeb+9Xn4upyYWpM6qeF+uTjQl9o/S74m+G4bT4ZS/EzwZ4psLzWtAtYWk06RvMjXb/s/xf7tfMHwX+Jut/FzxlqtnbPJJqlxPJdXEdvFt3MzfdVa+P/DP7SXxy8E/FbxVHZ63cSaRb6pI1/DNuZY/m27a+z/2Q/i54Bk1Cw+IWgww/wBtLexyrG0G1ZGr4fKM3nJSdXY8XijhChlyl7GXNJamT+1t8IfiX4VvNLstb8PXji4+ZpGT93GzL91q+cLjwref29NDqUKxxWfyRf7392v2s+K8ejeLvA3/AAmfjzSLGWBtOxArL8vnMv8AD/eavzg/aO+FvhvQ7BP7N8yaaS6knlVYvu/8Crtz/FUI0oqG8j5zhTC162KenwnhOmrbWypGkPlSyS7du37tegeFfFPhLQYY45LmMTyP/oqsn3o1/wBZI3+yteQeKtUvrWZLO2hbz1+5I275V/vV5r8VvjRqWh6bqei6Dcs1xfQfYpbpW+aOH+Lb/vV8pTjKpLlW5+jYiUMPDlR6b8fP2sPDHxO8SXOt68kieCvB8XkaXpqvsbVLrd/rmX+7uWvh74/ftWePPi14mmnub+4trCz3Jp1rHL8sa/w/LU/xI8XQ6ho6eG7CHyYN/wA/z7mZv7zV4zqWoPcTTwWyb3j/AIv71fQ5bl8YyakfJ5tjJThaMiDXvjJ4q85oZnbZ/vbv+BVF4d+N17Z3W+a5bLfK67qyNQ025jXzr22x5nzbWasi80mGVftKbVb/AGa+jp4XDOlySjY+TlWxUZX5j3bwZ8XptQmFyb/ey/eVW/8AZq9K8K/Eie/uGmS8k27l/d7q+QdNnv8ATXVra4kT/davR/APxKvLEJvmb/b3fxV5WKy5xu4HuZbm84+7UPqez/ac1v4b6lazJc3gtYdzvCr7vmavXfit+1emqaf4Pe2RY45r1ZZZPNbbuZfu7f71fFs3iiPxJqEWnxzcfe2q9bPxG8bPp+l6BpX2m4LWNw0+3zf4tv8AEteQ8JHSx9HDNpSpvnP1y/ZX+Muj61p6/wBvTbYo/mf978y/L/DXvPwv+IfgzSW/4SrVbOGSzXcqyNPtRWr8PvDf7bHifwHo722j6kyySffZvm3f3qitf+Ch3xyWzv8ARNK8W3Ahuk3RRrb7ttYxwmL2ggxObYaKP308Pfth/s1W/iR/Dd5qFvDcyT/6M0gXbGv+1JXpWkfETwP4igku/BviKzlRfmfbdb1r+Z7wz8Wvj34y1ppn8Q6ldy3Uv+rhT/vpa++v2Nf2nvGHw7htPCXjGwvoYm8tW+1W7Kzf8CrGthsdh4c9SzMMux2ExNW0vdP1Vm1r+0rUXP8Aq3ZvmXb/ABV2nwN8RSw+IvJuQqlW+RVrwvwH8RrbxhoMWq28yusy7lkjr0P4U6tdQ+JYXhdg6tudl+avBWInGpFy/mPezTDwqZdNf3T6A+OHiZvDHg6XXLi5W3tTbMtxMx+Vf7tfzQft1fFi8+M37Sni3xiniS4vIW1JrW1jaX5I1jba3lrX7ff8Fef2lY/hJ+yVcbtSEV3q0v2Ow2ffZtvzMq/7Nfz+XSw6lqCXN/c75vNZmmX5fM3N83/Aq/WsJKNajGbPx7BYb9/KZjw6bDI3/LRmb5v+BVLcaXc+Tsmh3L91mj+7Wva6OnmSp5P7tn3I0laVrpcEf7l7Zm3Ju87ZTqVPZyPoadH2hx7abMtr/o1ssifwf7NULjTX8vztnz7/APV/7VegtYpGzfuV2fwL/drJ1LTobdvMd1VvvP8A7tZKvzR1H9VjGRxmoaVM0e+ZGLr/ABL/ABVl3WmzRsyOWV/7ytXZXCosrJ9mZwz7f7v/AAKsDW7Xb5u75GX7rbN1dVOpI46lOH8xwWpaSFaV5k3N82xv4q5fVNJTaHfhv4a9F1PT4JIX2bS38bVyuuWe0SD+H+7Xo0ec8rER5ZXOA1KzmikL9fn+8tfVH/BMeEQ6T4xwxObmyPP+7NXzZrFvt+d4cbvlWvpj/gmlF5Wm+MRnObiy/wDQZq/V/B//AJL/AAnpU/8ATUz2eFVbPaX/AG9/6Sz5w/aTYx/tC+MJFlVf+Kju+G7/ALw1xm1Fb5E4b/brsv2kZU/4aD8YqzFc+JrsZP8A10NcarJu3u643ba+Lz/3c7xX/Xyf/pTPKxijLF1X/el+bLkM5HyId+3+KtW1vnX5ERWb+81YNrNJyiOrD/ZarsN0I8fw7q8s5ZRhE6WzvH2r8isW/wDHa1NPuJI5C8x3fwp89c1b3m1F8l/4N3zPWnp906/O83y/edWoM6lO51lneH78gX5l2+W3/oVXYbjzId6PJ833/n/9Brmre+jV1m87f/DV23vk3BE+X/e/hq+b+U4qkToo7qFVDmFkOzanzUkl87R8Iylk/wBW1ZC6hu/10i/u/wC7SRapDlPJf7qbZfn3bq0+Iw9maUkkednmbdqbd2/5agkvXVkf+Gqbao8jFEMaj/nntqvJqiOrOm1v4du+p5v5TSnEtXl1DIu/5vubU/hrImussu9Pm/2v4qbc3ifxt95qz5b7zJndnz8nzUe/8RrH3iLVrqHa2+bdJ97/AIFWBfSPJIzuGfd9yr99cPMu8uvy/wALfxVlyS7mPzMP/ZaylI1jyH0ZHHIpVJhnd/dp0dv9sm+SFYgqMzeZ95mqfy/LfyX++su7dv8AvL/DVn7Okcab+m5vlr4ipGXU/X8LjJR90zY4X2/O/wA6tt2r/F/u1DqFqkkbHfuZn2s0n3q2ZrF45IoXhVVjbcirVWbT0kkKJH838C1zxO/23LtI52+t5priUfdVU/76qjdWs3mKjpjcu75XreurOaR22W33v4l/u1i3kcbSedt+VflSuyMTixFaW5j3lq8ay7NvzJtfctZ8kbrI0MyrtrauoxGjb4eP7rVSnt3WTf5Kq+z7391a9Wjzch8lmFT2kiPTZNrL87bW/wBitjTlmmKR/d/vNsqnZ26Ltd+Qu1vm/hrWs49q/fbLfxVtKXszzI+9ISOF5mX7NM29X27q0o98J3vBIh/jWT/2WmR2/k/cSPCvt/2matLT7GGNWffu3fM7M3zVzyqFxjEreT5jCTyWLfN+72bamWzuVXZAjRJ975au2tq6xssbyKV+dV2bvmqS1hh+0M8/mAyOqqv+1S5uxfLzGdeRQtMjvHubft2/xbqhu4fJX54Wbb/Fs+Zq9I+F3wgX4kpfz3GutZm0mQKy2+9n3bv9oY6frXVz/so2lzEUm8dTlyc+Z9iGf/Q6+9yXwu434gy6nmGAwynRnflfPTV7ScXpKSa1T3R6mGyfMcTRVSnC8X5r/M8KNvBGqzP8vy7v9r/danRqkkqujx71+V1Va9wn/ZLs51Cv45lGO408f/F0xP2RLCMEJ45lGev/ABLx/wDF16i8FPEe93g1/wCDaX/yZ0RyHNV/y7/Ff5njCzOrfuduN3z/AN6tS1aZpPkf/tm3y16on7IumqF3eNpSydHFgAf/AEOr1p+zDbWgIXxrK5PQyWQOP/H60Xgt4jLbBr/wZS/+TD+wM0lvD8V/medaau6MJDuD7/nXZ/DXTaUz7kjS23Mz7flTbXT237OFrby+YfF8rgfdVrQcf+PVq23wXtrZdq+I5znhmEeCR6ferop+DXiItZYRf+DKX/yZl/q/m62p/jH/ADOftVS3l86Z1RP4Fb+L+GtnS7iazmaG5T915S7vL/hb+Fa1bf4YWkUgabUzKigBUaDgY/GrEfgFIp3mXVXw5yR5XP55r0KfhDx/HfCL/wAGUv8A5M4a3DGdTndUv/Jo/wCZd0CRJJNt5M2+F9jR7f8AZ+XbXYaDdPHshSaFW2fxfe/4DXJafoLWEm437SJnPllcDP51p2MjWYJYl3LZ3ZxiupeFHHyVvqi/8GU//kzgnwjnz2pf+TR/zPUPDd150my53YkfZ9/5l3V3mi6slqyQv/yzTam35WZl/vV4bpvje604Nts1YtjcQ+3OPwrdsvjbd2YBHh6JyDk75yc/+O0v+IT8ff8AQKv/AAZT/wDkyY8HZ9H/AJdf+TR/zPfdJuHVU4Xay7nZm3KtX9Nvt1usyIxPlbpV3fKrbq8EtP2jLyzgWGHwnCNvpdsAfw21ZtP2nb604TwdAQeubs5P47azl4Tcfv8A5hF/4Mp//JmkeEs9X/Lr/wAmj/me03rLJthhm3MvzPu+bdWLqG+OFvs20fN92OvS/wBmX9kb9r79qHwRa/ETRfB2ieHdA1KJpNO1XxBrTo14oZl3RxRRPIFypwzhQwwVJBBrlv2vP2af2n/2StD/AOEr+Ifw+0u/8PSXSWw8Q6DrLTQpK4Yqro8aSx52kbmTbkgbskCvk6fDOZ184eVwlSeIvy8ntqV+bbl+Ozknpyp3vpY4aeTYyWL9hePPtbnjv2338tzzzVGRZJd+4fJt+X5dtcR4qmRrP/Q0U7fl2t8275azLr40XVzE6f2GFZjkP9rJI/8AHab4Rl8YfFbxZpvw88FeEX1LWNZvY7TTbKKQbppXOFXnAA9WJAABJIAJr3q/hLx9SpupPCpRSu26tJJJbttz0SPZfC+cQi26aSX96P8AmcT4pkH2VoXfYNvyLs+7XlnjiaHy5cvs/wBrZX6WaP8A8EIP2u/Feix6r4h8deCdDubiP95pdze3Ezwj+6zQwshP+6zD3NfK/wC2P/wTO+PH7KtzZ6V8Y7eCGw1OSVNM1vSZFuLW7ZApZQch0YBgdsiqTyQCASPlsp4dzHOsx+pYGVKpV1tFVqV3bV8t5+9om/dvprscWHy6ri63sqbjKXZSjr6a6/I+I/FXnTzNsdgy/wDLRk+Zq4PXrOaSSWf7T95/vbfmX/Zr7z/Zo/4JCfHX9tnVb1PhJqCfYNNkSLU9b1YLDbWjSBiozuLyNhSSsasRkEgAjPefH7/g2U/at+FPhG68cad8RNI8U2dhayXOoReHlb7RBFGpZmEU/lmXAH3Y9zHoFNXjOFc2yzNVluKlShWdvddakmm9k/ftFu6sm03dW3Ir5ViKNb2FRxU+znH8ddPmfkv4gW1+yPsLNtf+GuM1C3jdnf5v9mvqn42fsd2vgT4d6l45h8evdvpypJ9mk00IJN0ioRuEhx97PQ9K+aNWt1Enku+F/urTzrhzOeFcXHCZlT5JyjzJc0ZaNtXvFtbp+Z5uaZbi8uqqniI2bV909NujZzY3qzJ90U+3abc53s3yf36ffRoku9EZf7tQLNMrK7wq7L/D/erzeb+Y8o0Ybr5WfZ91Ktwyfu/O3s/+7WXDO7ZjRFz975f4a0LV42j+RG3M/wB3+7WUo8poadlImVff/B95a19NLtIm9MfJWTYxwrHsR8j+9/drZsVfcqTOqq1R7TlLjT5zWsfOkKee6o6/drbsGhl+/wAHZ8jKtYtrD5hX7y/PuVvvfLWxp9p+7V49yqv+t3JXPUrGsaPLI17FX++EX/gVbumrcyR702qGTc/+zWdpSPtT59iM3yfL96tK1heRTCm4+Z/FXLUxUfhZ20cLItx2aRqs4mxF/wChNWjZr9l3JNCroy7n/vU6xsfMWONwrL/D81WWRIZsQosu1/7lebiMVGMbHsUcDy2Yy2j+ysnkptLPtXy/mqzHM/l73ePar7kkV6HjdsfI2/8Ah3fxf7tSx2ci/uXRtn8S/ery6laVSMYnr0aPL8IKzw2/32fc25G2/wAP/wATUUN1JJ8nkrs/jaP7tT3UDyRlIdq/Nt2qnzLTlsUhhZLaZd8n3fk+9XO46ndGnymRJMkkv2aa22K25Ytv96qrXjtIh6J8ys2yrsmnvCpd7mb/AK5t/DUE1nebfsxf733ZN+3dXauQ55U+WXu7lNVdZV2Pn5Nvy/8AoVSyRpqDFHRg+/8Ah/8AHqsrp+6Rsortt/e7aks7F5I1S2Rl27d235mat40+YzlGdPczZLGHc8RhZG2KqMq7W/4C1Tw6a8cjb0Vvl3bm+9/u1pNY/wCnEXMLB9n72P8Au/3dtTLpqSSb97Lu+626uj2JyuMfekc7eWu23cSblZk3fL/CtRrpaXDQv+73t/wGtqazS4uFTZt2vt3L/wCzUl1Z7pEdH2BW+Zl+61bRp8sfdOepzSkZsenvFIkMztkfM0kablX/AGaLrTdrb5ZWLr8qL/C1bCw7m/czbh/BItM1TS3WT7Y+35ovkbf/AKv/AIDWEo25Wa049DH8mEBXmf59m5NtWWvHtFSZ3+7tVtqf+g1DfF0ZYU24Vdrs393/AGaz7q4eZUmRGWJV27VraMvshVpx3iasmoIyvGkzIVbd81RLrkLbpk+/I/8AF975ayby6hmX/RnZjGnz1XuL54Y/kRlRv4q9ChL3PePJrUftG/JrUn+u8759vzRqtV217C7HuZP93fXOS6g6sPJf5mf+Kof7QkVmd34X5n+Wu+nPm3OSWF9pqdVHrB8xn+b5du9Wb5adea1tt+rfM33Y22/N/wDE1zUd9cou9JlG6ludSn8nY7/N/Ay1ftIxOmjl85QLuoah5ibE3Yb+Jf71Y+o6lNDGNn3mfa7b9tR3GoPIqfPg1l3DPJuM24/73/oVZe25h/2a6fvcoy81CZWXD4Zn+b5KoTXzzMrojMn3UarjR/aJNjuu7ZVZrErCv3vl3VhUrGjy2XxcpT+0TQ7/AN58zfc3J92hrhGbf/s/8s3qdbPbvd0Ulv7zVHJYPHDvRP8AZ+X7v/Aq5ZVv5jnqYKZXWT5flDbW/hX/ANmpqqjSf3fl2/71Sx27xyI7/KrJteSnN8q/Inzf7lL2nN8Jwyw/LLUhjV45G+66s/3aPMfzG3809ofMK/3dvystRv8AMqRvbbGb+Kl8XMY8vNIkW+eN9m3lv4qtwX0MaCEPt/8AZqztr2snnJMzbqfBNbNMjuF+X5V3fw1lUj7mptTlyzNi1ukZtiI1XtLeKOZnR9qN83ypWRb3HlyK7vub/wBCq5bzO27ft2r/AHa5PflHU9KjU5Tp9NndZt8cyqsjfOtdDZ3Dqv2lNqr93bu21xlnJ5cKzJN8rff3VvWd07Yh+VkjTd83zbqiXw3O6nI7LS7x/PR3+VfvbY62rPyVmCJ0+98yfdrlfDd+P40Zz935Vrp9Pjdo3S68zezLs+X7y152IlLmPQwsYyiX/sM0LDemwTfPFtf71ereHyj/AA7UxggGylxnt96vMrODbcLNM+Sq7drfdWvTvDqqfh+qKMgWkoGT7sK/bPAWTln+ZX/6BKn/AKVTPqMogoTkl2OHWOGORkR5NrbVdW/i+WiS1hGXh2t935f9qrMdvDIqfaXZFVvk2/N81L9l+0R7JkZh83zKjfw1/P0Y+/7p6uDomFfaW8TfOkgDbvljbau6snWo9sZebc+35tv3Wausu4d0zohYWy/KjMv3mrndQhSSN03sWk/vPXXE9Cnh4cxxOrKPnf5lhVNz7V3bf9mud1K12xb32s+3btX7u2uy8Q6PcrHs8tWVvm2q3zVz+paXuj85EZCyb9v92uqnL3YnoQw8eSRx11GkeYd6yOvzN/s1nTWsPlrsds79zru3V0mpW8LRv88YMi7vu/M1Zq26LHv+5tTb9yvSo82nY5a2HhIwJ7PdcbymPOf+GoZLVzJsTdhv4WX5a15LdI3Hk8/xf7VRzfOq7Imc/d2/3a9SjKK+yfP4qjCJSt4Z41+Xbtb+Fq1rH942x4VXb/Ev3apyRpHKZEm3H7q/3qksRtmZ0+9/eX71b/YPGqSinqdX4f2Dakb7v9pq7fQbySRkhuZlii+6rLFXA6Ldx+cYdjI7fLuX7y11uh3zqzJNMz7fl27vvVfLzR94iPaJ6JoN5ZxzvZwOr+Y23ds+aus8P3zNa/Zt671T5IWbbu/2q850fVHh2JGnzr8zbV/8drq9DunY/aXnzufd5e7burm9pynZRqcseU9J0m9eORJpkjQxxbdv3t1epfBfVLex8QLqVz8629rI6bU/2fl2/wC1Xiei6puaO5mmVP4XWvR/hrNc3WoXFhbIsrSRM0TR/wC7XjZ1KUsumo9j18qlzZjBnpXwl+Hfw31b4EXmq+OZlsbnxt4oZX1DULhVk8uNvvL/AHal+Aek/DfwT+1hb/D34deOYde0iNo23W7bo45N33a+bv28viA/hvwT4O8AaHrHlSQ6W1xKsO5fL8xvm+b+9Xt3/BBL9mG7+JXxmvPiLrM8kum6VbLcXjSP93b8y/8AfTV+aZdTxPsddD0uK5UJ81Rn64ftXyxWfwdsdRkhkhghs40SOP8A5Zttr8+/if4sfxZfXOpX7/JH8sUjNtVm2/xf7NfcP7X/AMZbKbwzD4Vhs4/skCHKyL95tvy1+YHxY8YXt14uuf32yHzWVo1Taq114/ERryjGEj53hbAzwuGlUqx5eY6K/wBF0HWLXffw27xxxfPJH8kjN/vfxV8sftHfD/TbWyuU8H3KyXk10yy/aLLb8v8AstX0T8PfEmja1cR2GqpJFa27Mtx5L/NJ/wB9V1Xir4A6b8RtJa80DSo7S3hRmWaZt3mVrl9SDnaZvnEeX3on5CfEiDxDp1vMlzDJFIvyvuSvKrrUPEmk28mxJAsn3pNtfpH4s/Zf0S88SXdt4i+zv5L/ACSSfd+Wvn348fB+z09Z30TQVeL/AJ57PurX2eX4rD/DKJ8DjMLiqseaB8k2uraxq1x5L/O/+1W1rHhXWNJtEuSi/c+7W+3hHQdJ1FLy2hmQszfu2ib5ai8Ua9NeW/2BEXasW3dtr069ZSlGEIniQwteL99nENqn2hfJ8xVK/frT8LyTXVx5KfKfu7qpWHh172++T5gybvlWvVPhT8Jb+6mS8e2ba33NtZ1pUqcC6EatSqd5+zb8Kbnxl4ytdBezkVrh9kU2zcq/7Vev/txfsK+PP2c/h3Z/F3xPpUlvol1PHBFeXDL+8kb7qr/FXa/sj+CX8L+MrDUtSso8Ky/M3ys1fZn/AAW2+DOuftE/8E1vCnirwlF5114T8QQ3l1tk+Zo/L8tm2/7NfIVakp5jGD92LPuJYPlyj2kdT8Qta1zTdPhH2l1X+5urc+GvxM+G+i6hDdaxp8dyyv8Ad3bdy/3q5Lxt8H/G0OrbNS0e4ETfKjSVe+F/7PviHxB4kisH02RRI3zs33a+meAwvsOac+U+XnjatOrFwpcx+lf7E3if9k74svC/gnV7HS9ajfb9jvkVWk/2q+7rL4d+CfHHhX/hG/Emj2895a2+yK6WBVZdtfkX8O/+Ce/xqXULbxJ8GXkhuYXWWJVb5m/y1fol+yjrH7S2m6vZeBvjT4Sm0u8jVVe6jf5bhf4vvfxV8bmmHrUo89KfNE+wy+eGxtK1aHJM9v8Agj4f13wbb3Gj/aZGs/tG1Gkb7te6fB3Xrb/hLLbfGzr9o2su1qw7XwTZw6YNQMLBJnVm3JuZmrT+C3jXSvCfxPx4gt1fT7G3mup7m42r5axqzbq+WhRp1sXCMv5kepXj7PKp/wCE/OL/AILjfteaP8dvjpZ/BPwL4hkuLHwDPJFetDuVvtkn+s/3tvyrXxdp9vDNdeckO/bxLuTd81df8ZtQTxt8cvGHieF28rUPFF9cQSSJ80kckjMvzf7tULfS0ZQ8j4Xf86r/ABV+y0qMaVKMI9D4PBYfmp8xGunpHhHh3jZuSNX+VWq9HYouUTzP91nq1Z2fkybPszOWep44Xabem4I33o9v3awre97p7dOjyx92Jl3Fq726u8K7Nvz/AMVZV5pu5XSYLt+8jKu1q6eaF45Am/5Pu7W/irG1a3SZmd0YN/zz3fdrKj/LIyqUeaGnxHHahZhWabewf7y1ja/HIsy/O23au9ttdTqVrtZ3Tps3O38KrXP6p532hneZnVU2pHtrspx960jyKkfd0OR1a1hk83ZwzNu+WuW1yx3MX/ib5fmru9QsvmkHyotc/qOmja2/j+Fa9GnHlZ5Nan3PP9WsbaOPZtr6O/4J02sdtZeMDEhUNc2Xy9uFm6V4brWk5UnY2N/8X8Ve+f8ABPq2a2sfFYb+K4sz/wCOzV+s+EGvH+F9Kn/puZ6fC6tn9J/4v/SWfLP7TRkX9oHxkEGc+Ibr+H/poa4Rrry/k/ir0X9qC2mT4++LZht2nX7k/wDkQ15xIuJN7pk79tfF59H/AIXMVzf8/J/+lM8fGSi8XV/xS/Nj45ts2+FF2t/Dsq1DeddzrhaobXjX5PmX+9up0M/zbHh+X+GvG5ehz/FL3jbsbxPlLx7l37srV9dSDK3kurN/B8n8Nc5BN5ce+F+W/hWrEdw6yMiblSiXxcxEpcx09nqTzYhhRd33d1Wf7eeNVSba235a5WG8mjP2aN9p+8+2ntfbRlNpP95qfNy/CYVNzsIdaTydjurFv7tDapthVIdvzfNXJLqgaPyZoP8Avlqmh1J2k+WfAZfu1rKRhyo6dtWTeuHwrffpn25IZG8jbtk/vPWJHqXnSLC6KzL83mVMrPIymbbt3/w1EpFRj73ul+ab94+zafn+bbVdmfyf3m1X+9/stTlL58t0wP4d1P8AJmMj7Id/8O5kqPaGsYlCZdq732qf/QagmtIpMfxbv7ta32Hy1Xjcyt95f4qa1n0TKg/x/L/DWPOaRjy/EfR0djbR3BedN+35fl/iqa4tfMhHkw427tm5fvVYs0hZfkhY/wAKfxNV1bdBahIX2/xOrf8AstfGVJe/7x+k0zG+zpDGk6Bkbf8ANteo5Le2jZ/nYpv3bpPvLWpcWPzbN7Kny7d38VVLuPaqI7r95vlb+Ks5RudEcRymDqASV3869ZPn2/L8y1i3sMZ/49oW+Vf4q6a6s0XY/kyK7fLu27lrLvLV1md3XZ8/8XzV1U/e0MKlTmj7xzF5azec2yHe2z7u6q0lpc28iu6LtX79bdxEjXDud37uX+FflqL7G8m9N7Hd/EtepRqS9lZHgYiPN8Rm2du/2j9yiy/N95q2rG3ufM2Jux/dVKdpeioyvOnlp/e/ire0fS03LJsVQ392nUrHPRo9ypZ2O21Fy9s3zPt2tV6x02GRWx/f+833avx2aSK0MO6VY/mRm+7WhY6TMu534TZuVW/irnlU9nA3p0485mNCkTI8KeU33fvblqxbR3LSfaUTMq/8tK1rjSTI3kum3+8q1J/Zu1fsyI22P7v+9WMqnNE3jT989g/YH+E+qfGT4n2nwi0LU7e0vfEmuWVhBdXgcxxPIzKGfYC2BnsPy61+l0//AAQ68IeBZJV+Nf7amgaAt1fvFoLPpscRvIlxhmE9ymJPmGY0LhePnOePhH/gkfJNYfto+BRbStFIPHuko7RsRkNMVYcdiCQfUGvpL/gs/qOp3v7eviG1vr2aWGz0jTIrKOVyVhjNqjlUB6Au7tgd2J71/VXh/i+KcxyvKMly3G/VacsPWqykqcJybjiZRsudabr5X0vZn0GGnj6lShhMPV9nFwlJvlTek7dfU4z9tf8A4J+fGP8AYo1y2k8VSQ634b1KRl0vxPplvIIGYE4hnDDEExUbgm5gRnazbW29D+xX/wAEyfil+1noFx8UPEHiW28FeBbNn83xFq1sxa6VFYu9uhKLJGhXa8jOqqcgFirKPftN1HUfGf8AwQi1C5+M9/MRpmoCLwfcXczB5I4r6NLdFJUlgCZogORsTG5QMr7h8Q/iH+xz8Iv+Cdnwv0r44eCde8RfD3VtH02GCDRJJZEa4Ft5w+0OksBbLiRsEAF0zsBUY9jMfETi7D5Osuprnxn1qphXVp01LmVNKTnCnKSh7Rp25G+VNS8iK+dZlDDewir1faOnzRSd+VXuk3bma6XtufJ3xy/4I5614d+Fd78X/wBmT496L8S9O0iCWXVrWySOObEYDOIGilljlZUJYxlkbA+XeWC15b+xJ/wTy8d/tweHfF2seCPiBo+jz+GUt0gtdUhlYXc8xYqrOgPlJtjkO8BzuCjZg7h9ifs8/t3/APBO/wCDlr4kP7I37MfxHlvZtJa71fTdI0qa5jlhgDESTBrqVYo13ENKV+VWPXoeW/4I5+Ph4X+Bv7QvxL0HShBc6bAmq20AdRGuy2vpY4wAgAwVIyBjBGFGOZnxh4iZdwnmNSupqrSnQVGpWp04TkqlSMZRnTi5QstlJWunffZPMs7oZdXlNNSi4cspRim+ZpNNJtfM8z+Pv/BKX4Vfs9/CTVvEXjL9t3wvF4w0jTFuJfC01oqmeYgEQRhZmnO4H5W8nnglVXJXS+HH/BGGS28A6b46/ah/ad8O/DxtYto5bHTJ40eSMugfy5XnlhUSqDhkTeAR9418UX/ibxDqviObxhqWt3U+q3F615PqMsxMz3BfeZS/UsW+bPXPNfof4k/bV/Y1/aV8G+GfCP8AwUr/AGffFHh7xXp+jxPYa59iuY0uYJo0P2yIxlJRHKyFwpSRAOVdsmvf4jh4k5Dg8PTpY2piOeUnVnSoUXVglFcqpUnZSjzX5m3KSVvn2Y5Z5g6cIxqud2+ZxhHmWisox0ur77s8I/bI/wCCXvjP9mL4ap8dfBHxS0jxz4Ie4iifVNOjMc0IlJVJGVWeNoi21N6yE7nUbQOapfsVf8Eyfij+1noFx8UPEPia28FeBbNn83xFq1qzNdKisXe3RiivGhXa8jOqqcgFirKPbP2qf2fU8HfsG33j39hL9pnXtd+Dl1qqz+IfCNyFk2EyGOSVZvLSZI1k8rfbOuDnzSTgVo/8FGdR1Hwr/wAEwPgj4Y+FN/N/wh+o2liusTW0zMs8gsxLGkjbRkGXznIO354x8uR8vnYPjPibHZVhcvw+Mi8RiMTOj7aVLknSjCHO1UotKKr9FHWDutbmNLNMfWw9OjCqnOc3HmcbOKSu+aL05/LY4D43/wDBG/xDofwxuvit+y58cdL+KNnpiSHUdO0u2X7U5TaStv5EkyzuFbcYyVbA+UOWC14l+xF+xZ4m/bY+JGr/AA60DxtY6BLpGhS6hLPf2skpcqyxpGFXGAZHQMxOVUkhXI2n2X/ghp4i8f2H7Xt14c8OT3DaJqHhm5fxFArHygsZUwysMEbhKwVScHEjgHkg+0f8Eyrfwvo3/BTn47aF4DuY5dGWHUTaup3/AHdTi4VyoO0FnGBwcDlsBqvN+K+LuFsHm+XV8Sq9bDUYVqVbkjFpTnyuM4pOHMt46arV+TxOY5ll9LE0JVOeUIqUZWS3drNbX7dzitH/AOCH/hnR7XT/AAz8X/2zPDmheMdTT/RdBtLNJVkZmKoIvOnhlmyRjIjXnIGcZPx/+0/+zZ4+/ZP+MF/8GviLNZz3tnDFPDe6dIzQXUEi7kkQsqsO6kEAhlYcjBMHiv4k+OfGX7R1x8TfE/iW6vddn8WLdPqNxJucSLcDZjPAVQqhVHyqqhQAABX1l/wX0WJf2lfB5SCJWbwOpeRYwHb/AEy4ABbGSBjgHgZOOpr6DKcZxhkvFmCwGa41YmGLpVZNKnGCpzp8kvccVeUbS5fe10vozsw1TM8LmNKjiKvtFUjJ/ClyuNnpbda21PhKus+A/gCb4q/Gvwl8NobI3H9ueIrOykhG75o5JlV87SCAFLEkEYAPIrk69C/ZL8Y23w//AGn/AIfeM7y1E0OneMNPlljO77ouEBI2kHIByPcdD0r9JzapiKWVV50PjUJOP+JRdvxPdxLnHDzcN7O3rbQ+sv8Agtb8f/GOgfF/Qv2Y/h7rVzoXhXwz4btpX0nSZGtoZJpM+WpVCAyRxJEEXGFy2OvHSf8ABJr4i+Jf2nPgL8Vf2P8A4sX0viPThoAn0KLWJHn+ziRXjMYZjlVSVYJEAIKNuZcHkeW/8FwfAmp+Gv2zv+EunsnW08R+GrOe2uNp2yPEGgdQTxlfLQkDoGU45ye4/wCCFmh3XhnU/ip8eL6wkOnaH4XS28/Y2JH3NcOi9iQsCkjkjcvTPP4FjMHldHwGw+JoRXtIwpVIySXN7d1I3ae/M5txbve10fHVaWHjwhCpBLmSjJPrz8y6976HwNf2N3pl9Npt/bvFPbytFNFIpDI6kgqQehBBFe7f8Ey/i34E+Cn7aPg/xr8R5YoNLaaexe/nKBLKS4heFJmLA7VDOAzArtUkk4BB8O1vUv7Y1m71f7OsP2q6km8pCSqbmLbRkk4Gcckn3r68/wCCJnwY8D/FX9qu98QeONFi1FPCfh9tS021urRZYBdmaKOOVt3AZNzMnB+YBgQUFfrvHeLweD4Ix9XHRbp+xkpKLs/eXLZPWzu99Ut9T6TN6lKllNaVVacrTt5q36nuX7Zn/BLT9sb46ftG618U/h78cNMutE1q8WWxi1fXLqCTTYtoxCESN18tDkLsOSOSMk5yf+Cq+saf8EP2HPhx+yN8Q/Hv/CWePIri3vLnUpZBJLHDCkqtMS4LhC0nkxk7WdY2JJ2sp+f/ANpb/gqD+2J41+OGr6r4X+K2s+E9L0zWJotH8P6W4gS2ijkKqs4A/fv8uW8zcNxYABcKPoX4teLf+G8v+CRt7+0F8Y/DMP8Awmvga9aK28QW+moJLpo54UkddoXZFLHKBIq4QSRFgvyKo/FqeU8X5HWyCvxFKlPC06tOEY0kozhOcXGnzvlXNFac6g0m+ktz5aOGzLCSwc8a4unGUUlFWabVo301Xe34lP8AaG8Y+Kf2MP8Agkz8M/h58MzL4b1zx6YrjXL/AE7fBcsssRuZiZAQyyMDBGTnPlqUGFAA8Z/4JJ/tO/EzwD+174e+H954x1K70DxfLJp2paZdXcksRlaMtDMqsSFkEiIN4GdrMOhr1P8A4KM2t18Vv+CZfwG+M2j6Qy22j2ltZXqxK5FuHtFhyck4XzLYLls8svPPPzl/wTD8B6l4/wD25/h9ZWFk8qabrH9qXbqpIijtkaXexHQblReeMsBznB97I8FleN8Mc4rY6EXUnPFyqtpNqcZTtq7u8UouOumljswlLD1chxMqyXM3UcvVN2+7Sx5l/wAFvvhPZfBr4qfF3wZonh6HTdOkvIb7TLO2hKRLBcPDMBGvQKC7AAfKNpAAAwPyc1SHZJ5P3jtZv92v2I/4L7+L7fxv+0H8WZbW2EK6eLHTi43ZkaBLdGY5P94EcYGAPcn8idWs3+d3hYqv8X3d1fkniPiMVVWTzxH8SWCouV97vmvfzfU+T4ldWccLKW7pRv8AichdW7qrP8zCqDWrwr8nylq3Ly1ePbsThqo3Nk24Mj/x18BGpynyHLzGfD5nmM/zYX7+2tO3bC70+Yf7P3qhjhS3kZ/J43Vo2sbybfJ/h/vVEpdzWnT5i3p8aeYqOGbd95dlbdnbvN8k0P7vf8+6s+xj43+R977+1/u1taWs21Y4fm2/+PVyyqR5fdOynRiaFnbv5Zm8lnZfm2763rGPzoD/AKM2xlVmjaszT4UVW2fM29WX5q3tJimaREd8fPtdWavPrVj06eHizY0exdVSHy1Xb9z5vvVsafb7m854WQx/Kn93/gNM0XT0jkRJnYln+Rmeui02z32I3cbn+X+Jlb/eryfrXNLlPZo4X3SPT7VFU/udki/5+Wr66em3Dw/My1YsbFIUe5+ba3y7m+XdV+OxSTc+xldVrgqVuWR6VHD+03MtbPbh34T+L56sJbzKzJ5Lf9dP4WrRktbOOON33L8nz7aj+zzRwo6OyfOy+W3/AKFWMZfDJHVGjy+6Vvsszfvw+xtq7WakXT7byw7/AMTfIy/e3VfWGSSG4/fLsk2/8BqW3s5o4/Jhh+Zvl+V/vVtyzluXGnGPxGNcaXZ3UhdNuxfk/wCBVBL4fh2h7lGLr95W/u/w10v9myKyWy/embdu/wCef+zTZ9Hf7QZptpXZsT/er0aNP3QlGHL7pzVvpaW8nyBi/wAyurfw1ZtdMRYfOSGbK/cjX7zf7Vbk3hmGNVcPt3ff2vuqxBpFtbru82R/Oi2szfer0adGPLoccv5TmJdNfKx/bG27fvTfM1VvsDrtmd/njbb/ABfe/vV2N/p9s80Lw/M2z+Fqp3mlwxx7HRt6t/E1dPs+U4ZU/iuc79khaMo6MvmfM0i/3qh+xJZw+ZCm9Gba3+zW9JY2fmK8MyuG+5uf7tULixdG+S552fNu/hp+z15Tn5ZSkY8apJ/qX3OrfdVf4aLqD9233vv/ADqzfL/s1d8vyZAjvj+H/Zpt3apcKrwuoZvvVlKPKZ8pzerWvlt5zp87feVqwLyaTzR/cVN23Z96uk1SGa3Xf5zFt+1ZG/hrmdUV9xMz87vurXD8J1L3oEEl9MzNB5yoW/26zr7UGVim/wCT+9uq55L7Qj220/w1n3lmdzJM6/f+7W9GW5nWw8qnwkMc3nKju+9Y2/ufepjXTr/rtzFvuL/eqw1nNbqqPbMqyf3n21XmtU3B0h2/7NdUa3N7sTqwuW82g5r55d/z/Pt27qZJNNtVJudv8W6kkXyzvdF2L91dlQv5fzyQpt/i2s33aqVafLofQYfKfcigEyecr7/9ylb98u93kZm/ib7tV13tG3nO29vuMqfLtq9Y277Tc/Nt+61ZSrRjG5p/ZREtm8bbPlG7+89Syae7J86YH+z/ABVct7fzmRNkmf8AZTduq7b6bNMrzvuxGn/fVc0sRp8Q/wCyeWJhyaCkipvfYzfcb+7TJtNjjVvLfjf87f3q66z017pf9Tt+RW+b5qq3mjoJFhhhVW37fuVyfWoy0ZwYvK/d0OVm0hFXG/afN+df9moJLH946P8ANt+VK6W4sUhm2fK3yt/urUP9nJuV5HXDfLWlPERj9o+VxmFlGRzFxZvHs2Q8fdfa21dtM+ywrGqFGb/Z31vSWMKzcpsXZ/y0+7ULaei/OkzFt/8AF91a3lW9w8ephzCm09933Nyt/DvqNbPdcLsT+P8AhrZvLHdI2/gf3qguoXVQibU/iqeaXui+r/zFOOF/vwu3y1djjmkkZ/MVGZ9v+ztqGGHH3/m2v97dWlbx7ZEh2K3ybk/2qr4YGlGM4ljT1aNkTZ97761t6azqph8njeu3/aWsqG12yLsTaWf71benwv5a4hVd3yo33a5vhO+j7ux0Oko/8c0hTf8A6pfl2112n2sO3zo9yvu2vufcu5a5fR03CF4YV2b9svmf3a63T45o1CK+8bvmZvvMzVxVI80z1cLU5Ym3Z2G79z5efutukr0fQURvA6orBla1k57HO6uB0iHy7dZXRW/5616FoMUY8JJDEgKeQ4VVHbLcV+2eA0OTPsy/7BKn/pVM+lyio5VJX7P9DlFtYZdlsjsZNy/u1/harUtrcx/uYfm2uzPtermnx3MM3k3SK39xdvzLU0MPmW/mb921/u/d/wCA1+DU6M+Y3o1pRlfmMDCMqJDbSTIzfeV6wdcs/Ojd3hj/ALvl/wAVdlqEbi3e1RFb/ZVNtYOoWMLQoX+Uqm3/AHq6PZ8p7mHrfaOI1q3fzGuXtlES/L97+Jqwr2zf54fmfd8vmL91a6zWo0jiWF3VQ277v+98tc/q0iRqzvul3Ov8XzV2UqMuU9aOIiclqVrc2qsiQKQzbfuVk6hD98OmHX7y1011++mf5Nv+zu3ViagttbjyfIY7vl+auyEJR6CqVqUTAuF3Sb03CRl2pVFo3t/4Gcs21/71al9a+Wyqi7D/AHaosqBTcv8AIy/fVf4q76cbHyWYVOb4SKRPs+7em7d/Ev3qLWP7Pdb0Rm/2lpxkfyxvTa7fw0kW6ZneE4X+L/arsjHmifN1q3Ka+lx+ZcBPO2qz/Mzferp9HkfzfOR/Kdfvsv8AFXK2FqHHKbXZflVfvN/tV0elwvHjL7H+6zK3zLUVOaRH1jlOu0u827fJT+LczMtdLpV88dwr3O3/AGGWuN09XjxsdmH93ftZq39Jme4VURF+XaF+f5t1cVSXunXHFR+yd5oeobbgJc/JKvyxMvzK1etfs/68mn+JvOmm+aO1kVI2+7N+7bateG6LdbtUTem54flWTf8A99V6R8I75G8WQwncr3D7P7rV5mYU51sHJHfluK9liozJvil+z/4q/aE0HSn8Kwx3OoWaNbfZY38z5d25Vr7K/wCCPfhbxf8ABT4b+K9N1jQ9Qsrp7uGGeGb5fl3fw/7K1t/8E8vgq/wZ+JjeNvFOgSXelWSyXpdf3mNq7q+gvhh8eP2ZvjNf6v8A8Kp0a5l1+/uZGubSCJlKFW+Zn/2a+FqqnGhyP4j2MZWqVMU3yc0Opyv7TmuTLvR5pHMMS72X7vzV8RePrHTZNeu33ybppfNlaT5lVf8AZr6n/aG1z7VNeW015JB5bMqKrfK22vnpfDqatp5mvIcmR/8AXfd2t/u15MY+yZ6EfdgeWaPq1h4f1R/sd5u/jlVvu7a9L8G/H+wtbaW1v9YmSwVdu2SX+L/Z/u1538WPhzreizM7wSYb51WNN+7dXz58T5vHmk+IrR7aNgnm7v7q/Kv8S16FHDupLmiefiq1CPu1T608XR+GPE1r9s8MeGLi5E0TM9006+Xt/wCBV8+/Gi38Z6Mvnf8ACt45rf7rSQorMse35d1eY/8AC5PivJJ/yEpv3O7fJHLtX/d21et/jl8YLjT/ACZpFltmfbtuk+WRa9WFPFU5RbR48vqM+ZRZ5d8QfiB4J1Czlhm8HtFPDuX5vlryHVrVNcvPs+j6a23eu6OP5q9u8beGbDxhqj3mq6VHEq/xW/8AFUOh+E/Dekx+Ra2y7YW3MzfeZq9ehW9h70nqeFisJKvP3YnK/C74B3OpXiXOqwthm+f+FdtfSfh34Z2FrpsSabCq+Snzxqv3q5bR9SsIY1sLZIUaP7qq/wAzV7L8IY7PXLT7HeXLJcbP3TRrt3VrWxyrQDD5b7HVfEdd8MNP0qz8Jprd4lmj2rR79z/vG3N/yzr9A/2ePCuifGj9mnVPAvifzXsLu1aN4WXcsn93/wAer4kh+Ad3D4fPim5ufJtoUVmjb5VVt33a+0/2H7rxLd/DwaR4ZsxPA0amRi/yxxrXz+Pjy1YSPqsBH2mAqQmfm7+3l+xHqX7OPxWhvPGmiTP4U17b/Z18vyrDJ/drX+Hf7Bt54i0+z8Q/C7xbD5Eksb/Z5Nr7mX7y1+rv7Q3wR8GftB/Aq68DeObBrnZFIbWRl+aFm/ir8vJvg/8AtG/sR/EpLHe2peGI7pnsrqNmZo1/hX/gVaVa05YWNSn7zj8SPNw2GpQxLo1fkz7P/ZV/Z78beEL63v8AxRCv2aGJfK8mBVbd/FX0p4u0nwlfNYQvokbz+asUU0i/Oqt8zfNXzf8ABX9szxCvhmF/E/hhjFJF/C+2SvY/hz4i1LxvqFtqb3LIrbmit5G/1a15H1irK66yPSxGBlH4djtvHsGmeGNBR41by1i3RM38TV8lfHzxpeaP8KfiH4hsLzyn/wCEXvILeRn/AOei7d3+z96voD4+eNg0Y0RrnZ5ab9sf/oNfMX7Ukltp/wCyj47165mbz5LCG3WFU+WRpptu3/vmuLCR9pmsEo7SOmph/Z5VN1Ox+b2j6HMqok1y0h+zr5s38LN/erdsdJhaEQwzKqb9m1k+Vmqa1tUt5gjurKv97+9WppdvMrfvkz/FtX/0Kv2Bw5ocyPicL7vukMOg3nnCZHjDxv8APCr7W27altdPmhV4ZkjWRl+61bsciSSedNbfL8q7m+9/31U91pKLbvMjqNvzIqp935q46lOctz16fuxOKvLab7Q6WzxqV3Km6Lc1Ys2j3KyPNI/m90X/AGq73VtPSS4e5b5Hk/1S7Nq1kXuhw27M6QzHd8zt/do9nLmsKpGEtjgNc0e5jdkmhZP4tqvuXbXK32mv814m4rv3L/s7a9U1bTkmg87fGsWz/dZv96ub1bw35kf2b5Wdfvssu1V/2a7KcYxPDxVP3vdPNNQt5maR5pvut/q1VfmX/erA1ix3L8nzLu+f/Zru77Q5rWE7Nu1k/wCBVgappaRskyIzp954d/8ADXfTlE8StG3unBatbTqr7Eyy/wATfdr2/wDYQt1gsPE+0/entCR/wGWvKNc092X92jbdny7V/wDHa9j/AGJovKsvEeEA3TWpyO/EtfqvhAkuPsLbtU/9NzOzhdWz6nb+9/6Sz5h/acsIJfjT4qk80gtrlyCAv/TQ15VqkOdyJCv3fk+bbXt/7RNktx8YfE+4DB1u4G4L/tmvI9es3Hzuiqq/xfe3V8Xn8eXPMV/18n/6UzwsZ/vdX/FL8zBTfJ1enq3k53puWmXcflNs8tR/u1CjSeXj+Fq8XlOb2hPDJtk/c8t/Aq/xVYW4dlHybf7+191VrdnG7/fqVZHjbKf7vy1X2Be0LH2ieTYibfm/9Bpv79tvbb92mpbzSbZjDll+XdV6Kzj2h33D/gH3aj+6YyjzFaFXZWfzty79tXbW1uZJFcBXFW7DR0kbfs3LWvY6WzfIkXzMn8NVKQombbw+Sq/Ju/3qt2lm8eX6Lv3bv4l/2a2LfQ0bY4tsszf981etdDMa7/vMzf8AjtYSlKUjanH7RlwwwNh3hb5fl21Yt7abd9/buTbt31t2+g7pPnDJt+ba1JJo7wyb9n/AmrnlLlOunT9oYzWc0J2dV/2aRYX2rDtU/wAX7z5a2X0vy03vSeX+8V3s1Xd8vzfw1hGpI19ifQS6S/nSpE67413IqrVlbV7dWCIoHlK21vm3NWvNpf8ApDvhWeFPnbd95qia32SbH2qF2/N/er52pT5T7Wn73xGLcW91IiQwzKh+9u+9WfNa2wxAkK5bcqsyfxbv4q6G+0/zriLZbKPvKzM33WqpeWqbhBsVvn3IrP8ANWPvHZKMOQwLu1mWPZ95F/8AHmrK1COFmX52+Zt3y/w1v6pH5m7bcsPLT+H+9WXdRpNN9z+Hcy7fu10Q92epw1OblkjAlhMl9smfaF+X5vu1DJayWTbJHZyz/dq7eR/6SU8lcb9rrUa7Ps/z/wDHx/Bu/u13c38q3POlHmJNNt4bO186H5tzbtqr81bmkw20kyTJDIyq+3b92sqzWaNwUG6Hzd27+LbXRaTNDHdJsRtirv8A9n/gVRL93qKnH2kuU09L0n7UY02YRv4f/iq1V09422Dy9v3VXO6ordkuFH2ZFbcv71fu/LWlbxpGqeTAqhdq/N/D/tVwyqc0T0I04RGLpqSfP5PzfwK3y7qhbT0t7VbmH5dz/wB/+KrrW+2N/tL79rrs2v8Aw1U1Jd0zJbPhG+7H/dpUypxj/KfTP/BKnTb7Q/2u/hnrkd2UbUPHOnKqoeVj8/y2B+oZgfY1+nP7dP7TX/BOXTf2gL74b/tefs86jrfiDwzDbfYdZ0+xV/tFvNAk6ozpPE5CtIw8t9yjJIxvYV+TX7M/xc1T4CXvhb42aLpVrqF54Uu11S2s7wt5U8kEhkCsUIbBK9jXm/7e37Y/ib9uH9pjX/2jdV8J23hj+2Ut4E0ay1CScW8UMSxRh5GC+Y+1RuYKgJGQq1/RfEs8s4WoZDWlSqODwSt7Ks6U1OclUk+dKTs+eS5bWtLyLzKjToV8PUkny+z+zLlabd9/mz7m/by/4KOX/wC1LomnfBr4UeCU8G/DbRCn2LQYkiV7to8rC7rGoWFEQgLAhKqcks+F29D+xv8A8FMPC3w8+EUn7LH7XXwyPjn4dyDy7ELDFJPpsWWfy/LcKJlEm1kberxHJVjhFX8in1jU7iRkS8nH+y0hWmT39x5w/wBMZzs+VlnPy1MvE7g+pkEMnWSuNKMueLVdqcam/tFU9nzc9/tX1Wj93Qbx2WPALD+wtFO697VP+a9r38/lsftl4v8A+Cn37Kf7PPwz1XwT/wAE6/gBceG9Z16Ird+JdVto0e0YYCuA7zPclQX2q7KiM27DZZT41+xx+3T4X/Zx+D3xe+H3jTwdqutaj8RdIMNnfWt5GqpO0U8TGXeMqMXDvvG8kqF2gMWH5ZTa7etEiveS7lb518w/LVO+1u7ijdn1C4Xav3vMLM1GD8Q+FKeW1sG8qnU9tKE6k54mUqk3TkpQ5punzWi0rJWVr6XbZjHHZdSw8qbouXM023NuTaaau7X0Psa1urmyuY72zneKaGQPFLG2GRgcggjoQa/QOD/gpp+w9+0x4O0Ww/bv/Zn1DUvEGhWSQR6zpQEwuW2gSOGSWCSIOwLeVl1BPU1+EF3q+oSycajcK23+KU/40+DVbq4fbLeSP5e07fNO2va4i8Vcl4ndKeKy6pCpSbcKlPEOnOPNZStKNNaSSs07jx+f4THcrqUWpRvZxnZq++qXU/aL9rf/AIKSfB/xT+zzL+yR+x38Grnwf4PuLhGv726dIpbiIP5jxCJC5+dwhaR5GZgpUjnNVP2N/wDgph4W+Hnwik/ZY/a6+GR8c/DuQeXYhYYpJ9Niyz+X5bhRMok2sjb1eI5KscIq/j3p/iG+lVzPNKBu3LtkNWo9e1BVd3v597fLuydy15v+vfB8ckeVvKZOLn7XneIk6vtf+fvtOTmU/NO1tLWbRxf2zln1R4f6s2m+a/O+bm/m5rXuftp4t/4Kf/sqfs7/AA01TwV/wTq+AE/hvWdejIu/EurWsavaMMBHAd53uSoL7UdljRmztbLKfEv+Cd37bnh39jz4z+I/ip8RPC+q+IDr2gT2jNY3KCX7Q0qThn8z7wZ4wGbOVDFgrkbT+YsXiO9LjbfOB5X3VJ+Wr9r4ouzMkM08hjblW840Yfj7hTD5RisBLK51Fibe1nPESlVnbbmm4c3u9ErJdtXfOGfZdChUoPDt8/xNzbk+13y306H1g2vW7eMT4n+wv5R1P7V9m84btvmb9m/bjOON233x2r3b/gpD+2d4Q/bZ+K2hePvBvgzUdGg0rw3FYTR6nPG7yS+Y8r7QnAVWkZQxOWADFUJKj86rPxBfLCqfaZWKtuVo87v92tnSdcaILcxXM7L93czHdur2cX435RUzTD5hUyuTq0IzjB+3dkpqKldezs9Irc9iPEmGxGIhWdB80E0ve72v08j3OgEqQynBHQivJbHU5JV3797bs/eP3q1bXXJHZ3ikcfL/AKljtb/arpq/SWo0/wDmVt/9xl/8qPapZ+qqv7P8f+Afpr8Nv+Cnv7NPxi+D2g/B7/goR8Br3xdP4dtxHaeKbUrPPORwHbLxSxOUWMOyyN5hXcwHSsD9qH/gpf8ACS8+AN7+yp+xJ8G7nwP4W1KXGq6nIyQz3cDDEsXlxlzmTbGryvIzMgKEYNfnXJr1zD9xHT91uX95upW8QvHbur+bhvl6/KrV+d0fEvg/D5lDEwyepyxn7SNL61L2Mal786p+z5U76pfCuiPIisrp1VUVN2T5lHnfKnvdR2/Q+6f+CZn7c3wb/Yv1rxPefFP4SXWsSa3aRx2et6RDDJeWwXO62xM6AQyEhmKsDlBlX+XbxXwf/bY1T4B/te6j+078J/hzp2l6dqWoXXn+DYJilt9gnfc1qrKPkIwrKwXaroCE2jZXyJLrBhCwvPI27+JTVJtRu8PDNKy7X3blb+GvWreNXDVTH4zF1smlKWLgoVU8Q3GUUrJKPs7LTqrNbqzbv0vFYGdWrVlSu6iSleTs0vLofq/rf7bH/BIT42anJ8SPjX+yLrVr4nv2MmqiwtgUlmJyzl4LmESsSTl2QM3U15h+2v8A8FLPC/xu+Dlt+y9+zl8HY/BPgG0ukkljJjSW7SNvMSMQxDZCvmZkb5nZ2CnI+YN+bOpXF3DGq211KZPvbdxw1ZN1qF+gbF5KdqblVXPyt/drzMs8S+FsDi6OK/s2tV9i1KlCpjJzhTa2cIunZNLRXvb11POhiMuwtWM3CUuXWKlNtRfkmunQ/TP9h/8A4KPeHvgP8LNU/Zq/aM+GMnjn4eapcb4rFpI5G09WJaVFilG2VGkCSBdybH3OCS1eqt/wUz/YY/Zl8N6q37Cf7L13p/iXWbGSBta1iJIhakjKEs8s8kqK4RjCCiMVHPFfjBquo3IVsXs/8K7mc/erntT1e+l81GnlX5mZN0h+WujHeI3B+b4+pi6uVVEqslKpTjipRpVJK3vTpqCTeivtd6u7bM8Vi8sq1pVJUZe87yiptRk+7VrH1j8UNOk+MVpq8Hj7Vby9m1ydp9TvXn3TzytJ5jSM7A5YvySc5ya8ok/Yk+DskPkG+1sKTnAvY/8A43XgOp6pqjsVGpXGxv70pb+tc/f3eoxK+7Urgtvwi+c3zL+dfT5l4ucK53VjWxuRxqSjHlTdRaRV2kv3e2rNcTneX4uSdbCKTStq+n3H0jJ+wN8D5Dk32vD5cYF/H09P9VUR/wCCfPwJLlzfa/z1H2+LB/8AIVfKt5qd7BIGTVrovv8Al/ft9386z7zUdUZj5eoT7P8Aanbd/OuP/iIfAf8A0T0P/Bi/+VnE8zyR/wDMDH7/AP7U+uD/AME9vgUW3f2n4i4z/wAxGPv/ANsqcP8Agn58Cwwb+0PEBI6f8TCPj/yFXx02p62zB01af+7tadv++utPh1PW5mXfqs4+f+Gdv8ab8QeAv+ieh/4Gv/lZUM0yd7YKP3/8A+y4f2D/AIKQFSmoa9kdzfx8/X91VqD9if4PWxBhvdaGBj/j8j/+N18f2upapt+fVLn5f4vPb/GtvTNSv5Zkht9TuPm+ZlaRvm/WueXiL4fx/wCaep/+DF/8rNlmmU3t9TX3/wDAPrCL9j/4TxcpcatnOcm7T/43Vq3/AGVfhnbSiWO71UkDABukx/6BXzNo93rB/ez6hK3zfIqzN93866LSrq8KrNJdXH93b5priqeJXh4t+G6f/gxf/Kzrp5hlstsKvv8A+AfQ1v8As8eA7crtuNRO0YAa4X/4irkHwV8IW5UpcX3y9jOvJ9fu14Xpup6hLJ5qX0qFX/e7ifmrdtr2984+TeyOW+bazn5a5ZeJPhwnb/Vmn/4MX/ys7I4/AvfDpfP/AIB67F8IfCkKqoluyEGF3Srx/wCO1MPhh4byCZLrg5H70D+QrzDRdRuNizXV84f7mybPzVeivLg2kkUch3SfLiRi1Yy8TPDfm14Yp/8Agxf/ACo6oYzB8vNGivv/AOAegN8LfDTsrmS63L91xMMgenSpF+G3h5ZFlD3GV6Eup/8AZa4EXUjSR/O+V6tuP3f7tT2M8zxn7I7ff+75h+7SfiT4bf8ARL0//Bi/+VG0MVhmrqkvv/4B2zfDTw65O6S5wwwVEigfotTL4B0FAMedlVwrbxlR7cVyOlw+YiXL3Mof76qzFt3/AAGtW0S6eNXlimX+Dcw+9/tV1UvEfw4n8PDNP/wYv/lYfXMPLel+P/ANqLwHoUTBgZyQcjdIOP0p6+CtGBDP5rkZxvYHGfwqlawySSLsw7N95VX/AMeqza25nb7Xbo6Fn+RWFdtHxB8PJ6Lhymv+4i/+VjlicNGP8Jff/wAAnTwfo0b+ZHG4OMZ3Dp+VKfCOjkY2OD/eBGf5Vet9DF5aCLyxtZvvsdu2nXGkBLpI5rgfd2qqr97/AIFXUvEDgBfDw7T/APBi/wDlZzrFYSX/AC5X3/8AAMs+CtEIUBJBtORgj/CkfwPosgIlMzZILZYckDHpVwaWzXRS5QlNv9/azVQ1LSr+3iUoiDe/zLn5WrT/AIiBwFb/AJJ6n/4MX/ysyni8FF/wF9//AACB/hh4YdizLP8AMCCPMGDn8KZcfCvw1chRLPd/L6SgZ+vy81T1KwnRmeAzbF/5aSSL92svU9MnSNo453lMm1Ym3D5l/vVMuP8AgGGv+r1P/wAGL/5Wccsxy2DusMvv/wCAbI+DPg8MH33m4HO4zjP/AKDQfg14Q3tIj3alv7sq8f8AjtcbNBcIxRbqVmba33Cq7qpXVreBiIWbePmlZnLfLXK/Efw/5uX/AFdp/wDgxf8Aysc8wy6muZ4Zff8A8A7a7+AngW8yZGvVJGCyTKCf/HaoN+zH8OXBV7nUyCcnN0v/AMRXH6qskqhBeNGv3U3OfmrY+Cv7K/7Rf7SviePRvgz8M9b1x3fynktY3WNWX+JpG+VVrN+Ivh7y8z4cp/8Agxf/ACsn+2MsjK0qCXz/AOAasn7Lnw3kIzd6qMYwFuk7f8Aph/ZV+GRJb7TqmSck/ak/+Ir7C+DX/Buz8Xbq3g1v9o7456f4ZhcsZtH00m8uFX/eX5Vr6D8Of8EH/wDgn9ocMaa/4p8ea5IyrumbVBAu72Vf4a8yv4ueF2GdpcPU/wDwYv8A5WaU8ywtX4MI3/Xofl5P+y38Nrn/AF11qhOc5+0pn/0CmSfsp/DGTGbnVB/u3KDP/jlfq/cf8EQf+CdMg8v/AIRnxdDuRv36+KnZt396vOfGf/Bv7+yjrDk+EPjX490hPu7JZYp1rmXjP4VPbh6n/wCDF/8AKz0aGYUlLSg0fm/P+yH8K7mQyy3msFj1P2xP/iKYP2PfhQCWN3rBJOSTdp/8br6q+Lf/AAbwfGrRklvvgh+0Zo3iaBf9VZ+IEktblm/u/L8tfH/x0/YH/bc/ZzkuE+KvwZ1qK2t5f+Qlo+bu2aP+9ujr0YeK3hnV+Hh6n/4MX/ys9nDYzDV95cvqjXX9j74UJ9261f8A8Co//jdSw/sl/C6AbY7rVgM5/wCPtP8A4ivBIJ71L86Wt5NFKv34Z2dW/wC+c1p2IvlYb9Tuf725pDWkvErw6cdeG6f/AIMX/wArPZoYJV43jP8AA9xP7L3w2IIE+pjLZBFwnB/74qZP2bPh4gws+o4/6+E/+IryJEktlBW5lLSfc2yP8zVoQT6nGDDPqE25v4d527a5ZeJ3hx/0TNP/AMGL/wCVms8vqxdnL8D04fs3fDsNkSah7j7QvP8A47RL+zh4Clk8xrzUx7C5THt/BXlqGaSTyLy7ddr8t5x3VQvJrpTsS4lx6+Yf71S/E3w3f/NMU/8AwYv/AJUeXiMOqbbauesS/ss/DSZy73Gp5Y5P+kp/8RTJf2VPhlKQxutVUjptuk/+Irxa4vb6RnH2112t8+1jVSW6vZGb7NezIP73mHbTj4neHD/5pmn/AODF/wDKj5nF1sHTV5UE/n/wD3F/2TPhhJy95qxwMf8AH2nT/vik/wCGS/hbgD7TqvAIz9rTv/wCvFI31G4VVS9uA2cblkO1qe1ver88d9M5X+HzDWs/E/w6pxV+Gqf/AIMX/wArPKWOyxy/3Vff/wAA9n/4ZH+Fe8SG41UnGObmPken+rqB/wBjf4RuxJudYGRggXif/EV43u1JoykM83zbmSTzD8tZd42o5WP7bKHb7zLKf8aqn4n+HU3/AMk1TX/cRf8AysbxeVf9Aq+//gHuo/Yx+EIGDdawRnJBvE6/9+6kT9jz4UIjILzWMNjP+lx9v+2dfOEs9/aXYZdUnQ7vutK3+NSf2pdqWlTUrlpG+bb5p/xreXiT4eKOnDdP/wAGL/5WZRzHKnLTCL7/APgH0jH+yR8LovuXmsfX7Yn/AMRU9r+yx8NLRNkdzqh92uUJz6/cr5xsb/VJbjzprm4jVvmT5zXRaHHeTRPFPdyOVbP+tO1qUvEjw7ir/wCrdP8A8GL/AOVl/wBo5Y/+YVff/wAA98sv2fPAdgu23m1D6m4XP/oNaEPwi8KQLtWS7PuZV6+v3eteUaIbidQq3TN+6YL++KqrVvaLcX1orPcK5eMqPMOdsi1nHxG8OZO64ap/+DF/8rG8zy2l/wAwq+//AIB6LbfDzQrU5jluD6hnU5/8drWttOtrTTxpsW7yghXk84Of8a4eyiu4lSZp8+Z9zaK7DTVdNAVZcKwibJJz681+l+GfFvCecZli6eAyaGFlChOUpKfNzRTjeD9yNk7p3122PVyrMMFiak1SpKLUW9+mmmwg8Naech3lYHHBfHT6AVYGm26xrEC21egAAz+QrJWULue2D+rw5/8AHqtFQkQfcERfv5NfnUfELw7Wi4ap/wDgxf8AyszjmmB6Ul9//AJxoNiu4K0gDMWI3DGT+FVbjwVotyhjlEpBOSN/f8qfLa3Lzec0BdF+bcx27awvEdrKJAyySB4fRvl2tTXiF4dXt/q3T/8ABi/+VnZSzLD20hb5lm8+EfhK92+d9p+X7u2UcfpVKX4DeCpozG9zf4Jz/r1/+Jrltbnlt4HNsSyjcrLuK/8AAq898Q6tco7RR3Eqsv3VEx2tXRR8QPD6e3DlNf8AcRf/ACs64ZlTteKPXpf2afh3KBvuNT4IIP2peo/4DUcn7L3w3lJMl1qhDDBBuUI/9ArwaTV76NvJhurj5fveZKfu1Vm1TUmkXZdSfN8zfvD92uuPHXAD24ep/wDga/8AlZlWzanCN3G/zPfH/ZP+GUgO6+1fLHJP2tM/+gVBL+x/8KpQQ17rPzdSLxOf/IdfPV5rF8JHb7fOuf4vNP8AjWdd6vqjReVLqE+xd3Kyn/GtFxzwGo/8k9T/APA1/wDKzya2d4KMbulf5/8AAPpOX9jn4UzIEbUNaGO4vI+R6f6vpTof2PfhTbqFjvdYwO32tP8A43Xypca3eyMTHqVx8v8AC0zfL+tOttc1adkji1ScH+FhM3+NJ8ecA/8ARP0//A1/8rPOeeZZf/d19/8AwD6xt/2TvhfbYMdzqvyrgZu0OB/3xVyH9mr4dwjCz6ic9Sblf/iK+Y9F1q+df315cNIv8X2g/wCNdDY6zdzXCma6kVdm5VaQ1jPxC4BTs+Hof+DF/wDKx/23lslf6svv/wCAfQ0HwE8EWyhYbjUBtGF/0heP/Hamg+Cfg+3IaOe9yO5mX/4mvC4b+/jjEiXbyt95f3x+WtTS9YmbMM1wyurbnXJ3Vzz8Q/D9b8OU/wDwYv8A5WdEc2y/ph19/wDwD23T/hh4e01w8FzdkgY+eVTx/wB81raboNnpWowanZySLLbyiSPLDG4fhXjlnq108CJFM7H/AGWNeqfA7xbpug+PLK/1WTbZxyrvMi53L/FWdTxE8P1C3+rdN/8AcRf/ACsl51l8XdYdff8A8A+lfD3/AAUV+Pfhf4fXPw50bTfDkdpd2pt5bo6bIbjYVKnDebgHB9Kwvgp+2h8VfgBoWp6H8OtF8PQtq+BqF/c6c8lzIoOSm/zBhT3wBmvvD4kftGfs1fFP9kbSU+G0Vkuv6IlvLp6vZLHI0kf3scc18taf+zB8bvht+2d4V/aV+NN3aDTvF9x5ljamQPujWP8Au9F/2a+fxniT4Y0EpLhalLT/AJ+JW/8AKR6WV5zg8x5qc6fI77b3fTseReNP2qviZ48uWudatdKUs+4Lb2jqFPtlzWIPjZ4x3ITDZEIcqhhbb7DG7pX0n8fLPSjq19NBaRrKZd8iLEFIj3bvSq/wk0q08QrNNFpKKscW7aYw3/fVeLPxZ8K1HXhKl/4NX/yo+mp0/aHg9v8AtI+MIbt7648NaDcytAYla4sXYID/ABKPMADe9ef+LjaeNdVOr61pluZD0WNCFAznAySf1r7T8QeKvAvgnVEsLzTLfUXKM0qraqyw1xl74i0DVll26RaM3zPueMbYa9DB+KfhhUhePCtKP/cVf/KjzcbKlRnyyhzHyK3gHwizMx0SLLnJPOemOtZ158IPCV4csbpOuPLmAx9OK7f9pP4xSeHrddG0bTHeOXc3mlwBXxr8Q/iDrN1qRtri8m2yMxz5pK7q9GPif4cyjpwvT/8ABi/+VHnzxOAo6ypJf16H0Bc/s8eCLh941HVY/aK6UD/0Cq4/Zn8AgY/tTWMYxzdp/wDEV8j6n4x1J2kha9nP+15p/wAa5a88ZaxPOiR6hdeWzbX3TN/311ran4i+HFf/AJpen/4MX/yo4qmdZfTdlSX3/wDAPubRf2cfAeh3K3Vvf6rIy9pbpcH8kBrudCsbfw7fLf6cmHUABX5HHevFfhx/wUB8P/sw/CbRfDPg+K0vboWbf2neXdos5mZv9+ty9/4Kk6N4n8FC70qO1h1Bfv8A2e3Cttrkn4k+HUXpwnTf/cRf/Kj0qeLy1K9op+v/AAD6D1L42+OdV0X+wLme3FtkYRIyOn/AsfpX05/wS8/aiubT4lR/APxDooZPENrJBpF7ZqQ0U6RvIfO3PypVWAKjIbHGCSPx/P7WfirxL4qPiPxD4gvrmeWXazXU+EZf4V219u/so/FJ/AHxL8HfFVSD9mMVycNgESQkHn6Oa+jyvFeH/HvDmcOlkUMLUwmHnVjOM+aXMoykrWhG1nHXe60sbYephcdSnToqz/qx+hPin9rrwf4B+IF78IvEOpLb3bRbYmml+6u7b92vP/E3jLSfiRpMvhW8mWaxVvkkZfmkb+Fq8E/4Kha54Y1r4Xr+1F4Pv47TWNNv4/tUa/6yaFvvKteN/s2/tOX/AIkuIEu9TuJ5mdVlWR/lb/dr+Rlzyj7WD92R61HD4eUOWovePqr4E/s9+LU8bPNo+pXFxEt/t+zzfd2/wr838NfUd5rGq+GvDcOlXmiRw3bJuna3Tay/w/LVD9kb+yNb0K31Sa2VZWbczRv+93f3mruPjSumqxSKzb5YmX5W+ZqdaMY0HJfEeVWlKOMVM8K8X302pXn/ABMkaTb/ABNXhX7a3iC80f8AZ1ltoYvJs9Y1GGCBZIt3mSK38O7+7X0N4k0220vRvt80bDd96T7rL/s18b/t2eMLzxJ4g0TwBczSS2Ol27XirDcbo1kkX5fl/vUcNYf6xm8ZS+yXneI9nl7ivtHz5a6RebW/fRhlTd+8StbTYXbZDbP+98r723/2anabazW80XmzfIz7WZU+bbV+G33XSuNvnNL/AH/4a/WZRhL3T4vDx93UntbeFbd32eUy/N++/irSW3ddqP8AeZfn8tvlqGGzcRs83lojP8ke6tOxsy37lHX5tq1PsY/EejGXL7plalpcLbpZtqN/EzfN/wACrI1HTXZfOSaTf/Ev8K//AGNdj/Zb+S0I3RFflaNvmqCbQ5mt1mFm3zJ/EnytWlOmpS0OeVT7J51daKjQO/kwzL8r/M+5mrB17QftDNc71j/56/3K9LvtFhj+eEbxIu1FVVrm7/QfMhZUtsKvzN5la06f2jzcRV908m1vQZomaaHb++2/Nv3ba5bWLV4VdEds/d3N92vWde0N47OW58narPu27drL/wDY1xuqaK8Lf8ey7Wbc8a/3a6adOMjyKlM861bSxHCR8zNGv3mf+Jq9S/ZCs/sdrr8ezH7237YzxJXIavo6bXR337m+SNq9B/Zjtmt4tdLoAWnh4H0ev03wjv8A6+4W/ap/6bmdnDUYxz+lb+9/6Sz5v/aAsUk+K3iQgr82sT7lK/7ZryTxBpPkyH522V7v8b9O874k+IZCmVbVLgHcvfca8p8TaS7Yfzm2/wAKtXxnEMf+FvFf9fJ/+lM+czDm+u1Y/wB6X5s801Sz8ubfsU7qghtWkVnxjbW9q2kvGzb3Vd3zKtUo9Jdm2P8AL8n3q8bl5feOMpw2TyZ+fH+1VuK1eGVJH3fd2otatjo825fITen+1WvY+H0umWaZGT/Z2/dqOX3dC5HP2ukzSSbI9zbf4a14NBmk2pD93+NWrpNN8NqyB4flRU+WtPS/DbztFcp87L975avl5/dI+E52z0Py9qeSw/2q2bfR9pXbw395q3F8PiOHe+1/+Bfdq9H4bm83Yib41/5bK/y7qylzco4mJY2tzCqf6Nv2/NtatjTbFJF3um5m+Zdv8NaFnod55vlodqt9/wAz5v8AgNbmm+F3VVZ7b97/ABL/AA1hKMzppmRb6G9xILxE+RZf4aW60d5GfEOP9n+GuysfD77Um8vCw/M1X/8AhG7U/f8Allk+ZGX+7XLU8ztpy5ZaHmFxpEMg8l7ba33vmqhLo26Rnd1G7/VMv8Nejal4XLSP8mX2feb7tYmpeH0t1SFId7b/APdrKPx+6dMZRl7p7akMLSB5tu5fuR7Pl/4FUFxbv9q2743iZfnZfvVsyWr21r9pSLa6syr538S1W8794k0MOz5NzfJurzJUT7SMTGuIUt5DDN8rSfMu1fvL/tNWdf2Kecr20ioNm7dJ/DXTahbJcLvSzZhIm5v96srULW2aNYfmZ1/h2/w0nS5dUKpLlic7q0c0cbpZzL/e3L826ufvo0C7PO5b70bV0lxZ7l3ui7du1N3y/LXM+II0s2MyfIrN95VqfYyUrHFUqR+0ZepTfdm379332/u1Ta4/5Y+cp3fxU/Up90jSQp+62/Nuqrat5KfvnjxsVUjVfu/7VbxjynnSlzS8jYs2maNfnyq/3V/hrZ09khh3I7Jt2sjN96uZjvNzeS6cK/8AC3zVu6Sv2p/JRN38XmL/ABVjWjyxKoyjI6zTbxGhS6mm27m2NJWlDqFt/qfmdY93y/drnLOR4YUSE4TYzbf7zVaW8ttxvPJbzW++y1zcvvanVzSNj+0N0LIlsyuqfd/vf7VUby4cR75tzr9146zrjUpmZXeZY23bWjZ/++ai86ZSZpp1x8y7d33WojGZUqkuh7D4eYN8F5GQYzpd1gf9/K+c2uEdlTfsl3fd+8rV9DeF23fAt2kO7Ok3e73/ANZXzVqV1+72I67Nu5l/2q/fvFayyLh6/wD0CQ/9JpnTn7k6OH/w/wCQ/ULhGVjN5jOr/wALVnX+sRhWSxdQn97+KorjUIUVnRFV2+/uesa81ZAqv/e+7X5DCjzHy0sRLk5TZt9SkuNrufmX+791qbc30PmL/pkjt95l/hjrnYdYeOZk879yz7U/u1dutQhmhDw7gm37tdlOPKYSr8pozXUdxGN+3O37yv8Aeao47qaJWS2fZtbayt/FWTDqW24fjejf3m+7T11Kb5od+U/vMtb8suU4albmlc2luEaTZ0H8G5qsLfTKPJR9jf3q52S+e14++f4Ny063v/NV/wC8z/8AAqcpfZFKp7v946iPUsMUd1fd9+rNvqTzM/zrsh+6q1zUNwZG8t3Yj+OT7vzVo2d88jb/ADFwybdy1zVJTN4/zHV2OpbpVCXP3k+Tb8taul6pt2qjybl+bcqfLXJrqCWsMUe9f/Zv9mtXS7yZV3vMrbfm+Vfu/wB6uKodtH4jt7fVJmhT9yoT722N9rVpLrW+3857zczOqvIyf7NcVZ6pDcKyedtVf+ejVYbVHMaOkzMzfNtj+WOvHrLm1Pao1OWB2C6ptVLmNP3jK3zM1Mk1TLM73O/7vmqtc8uvPDZ/67BkTZ/lqkXVpolb/pomzatRGnIupUgdCtw8krI7ttm+5SrdWcarvm+dV+dY03Vi2987xqjvIpV9v+1t/vVJb3CXEh+fzd25Xm27dyrUezI9pD4S3NdJdq800rNE391dtYV800sazW0jJ95XVv71bWyGaFX37hGn+r3feWqN3bvHC7vtZG2/u4/vVcY8vuhJcxzupzX7R/Y3O9933f8AZrm9Qt/mmSaZtq7WRW/irsL6F4W87yZMMn3v9quf1zT0kk8t4d3+0q11UakY+6jklR5tZHL6havDJshdn/2v4dtYmpfKzTbPmX5UbZ8tdRq1r5e77u1fvVgatMgGx+iv8+3+KuuNTmmOOH5o8py19bzbmf7rfwKy1n6hbO8bBPmffu+aty+UyD/U/K3/AI7WXf2TyK3zso+9XbGXumNTD8pjzK8ch9KW1t3jbfNHt3fNVjyUbO/5v4qljtQzbHfedvy1pzcpz+xn8RY09X+byUYN/eb7tdDpdqlrcRbE+b7rMv3aztNtUh2edCwbZu/3q6PS4Ukj+eFW3fcZkrz61aB0U6Muc1dPhRdjpu3fd/2d1dDZxzRsm+RQ+z7ypWPYrCIvJy3zfc2/w1sWcfyMrzM/mfNu/u15sn73M4ndGPL8JrWavHH8k33v4mX+KtXT1DK37rfFGnzMv96s+xaa48uFNp2pt+X+KtSxV2/0ZwuPuurVjKXu8x1R980IUfa8Lw7yzbauTrM0cUybc/d27vu0Wq+XiaaH5fKbbHGn3lp+n2u0lEhb7/3mrl974oHSuWOjkWbPzrVUdEXds+fd81WrNXmZJrZNjbf3sci7lqOzhmhQu8KuJN33m/8AQa19Lsd0iujtsXa77f4V/u1pCXvSOyPN7L3S/pdq8W3y4Y9n3ZW+7/3zW5p+moq/vk+78vy/3araLps1uqrNc74t7NLuXduWugtbNJpFeJFcQ/LXp0o+5eJl8MinHYvJMuxP9Z8vzVp6PpH7v5+rfcXft27atLp6RhU3q5X7kcK7latezsvL2vMjb/7u3+L/ANlrrhKNMcpSlIrf2Z5liNm1U2NvVv4akt9JLfuYduzbu3N/erYt9N87fNMOI2+Vl/ib+7tq3JH9ojX7TtRdi/KyV3R5Kkipe7H3jnV0Pdcb/lZvl27vvVV1DR9sgR0ZQrfvWb5lau1hs7b7Q0yWfnPG219r/wAVMutJdpi8f3lX5GZ/l/4FWsfdkY1pLk948x1Lw7H57hE4X+Ff9r/ZrDvtO8jbbTOsI2/uvlr03UNB8qOW8dP9ptqfe3fxbq5bxBodnJL8/Rv9VtrlxFSPwnnxlCUzzvUNNk8yOKGNVbc3y/e3f7VTeHfh7r3izWo9B0S2a4mvH8q1ht4mkaaT+7tWuo0LwFqXjTWLfw9pWiXE13cOsEEdvFueRmav2S/4Jgf8E0fDH7Nnhiz+J3xLsYb7xdcRLJBG8S7NNVl+6v8A00/2q4oyVSrGETnx2NpYWlJs+f8A9gD/AIINaPdaNafEf9ryBnE0Ucll4ahfDNH95fOb+H/dr9B7X4f+Cvg54XTwV8NPB+n6Ho8UW2Kz0m1WJdv+038VeoMqbCBXnvxm12DRrAtM+0fxf7Vc3EK+rYHT5nzeBrVMXjo855n4x1+3tsrEGl2/8865STxBCzKdi7G+b723a1ZXiv4laJBIYUv4dzK37uR9tcRJ4uttVulvBqXlIr7dqv8AK1fkmI9mpn7Fl2DoRpe8z0m78SQiEfZrjLbf9X/do0/xZpzolvczNE7My/N92vL9Q8bY02Qw3MLlpV23CvuVVqjp/izVbP8A0bUvLzHL961b5WX+GuX2nLC6PVjl9CUfiPZriaCKY3KHzpP+WSxvS/20n2WS2uYVlST5fJkTcrf8BavGbHx5r3h23vtS1XWPt8Mcu6KG3i2yQru+7/tVtW/xOmvI5X8hlVov9HkZvvf7taU6s1Exll8Ho3cpfG79h79i79oBoj8YPgjpbX7RNEuraOn2WdVb+80f3mr4u+N//BB3SNHvH1X9mT43yXULK3kaD4si2tu/hVZl/wDQmr6/1r4qPafZg6NdPJ8sse/ay/8AxVTQfEabT1uEnuY5Ujt2ZPJl3MrV6WGz/HUbwvzGdHDTwsuejOSl+B+O/wAbP2Vfj9+zfNFD8Y/hvfaYm/Yl9Cvm2kkitt/1i/LXDXFuG2wwzKV/jbf91a/dSPxponjrSx4M8c6VY6lpVwn+n6feRK8Uy/8AAq+Mv22f+CS3hHVLCb4xfsS6kbcKjPf+A9Vus+d/e+yP/wC02r6TA5thcauSXuz7Ho0c/qxfs8XHT+ZfqfnrdfuZAg8tlV22M33v/wBmse+WG4bdvVdr/PWz4m0/VfDuvXPhvxVpVxpWoWcuy60++t/Llt2/2lrHutn2p0f5D/E38Neh9qxljcRSr+9CXumX8m50toWHz7mbbu20v2G5WbZM6qyp/f8Alar9rH5URTbhl+6396plt0mm3o7bf9patS5ZRsfHYyn7TmRX/s879iW+3zNvzU5bPdCzJ8qr8qLHWhDZzbQ7wqgXds+bczU63ieNj5MPyyfP833t1Epe0PI9nGNjEvrHy43mcNu2bVWsXULV418wR7WX+Jq6y83rMd9tyzf71YOoW94uoSvsjxvXb83/AI9XRHl5tCfZ+6c7cH7ZiZEX+9uZPmZqqLHuk+f76/M6/wB2tK8017iR7nzvm3/xf+y1TbT5oZGm2K5k+5/drpjUjzcsjj9nIls43vLhXd2/dsu1Vau40m3RdtztU+Ym35q47SLV47hHkh2uv3o67jwrb7m+0yfNtT/Vt91q1jL3NCffOi0m1RWG92RV+Vmat/SVeQN9sdfJVtiLN8ysv+zUOhafDN/pM0zLu2t5ez71dDp9i8sf75I/OZ/kj2fw/wCzWkTjqxl8UR9qrRshfzHTYu+Rf7392us0Nd3h5FBPKP8Ae69TWHp9j9nkV5oWVlba3+0tdHZIY9OVGIYhSCVOQTzmv3TwPi/7azCX/ULU/wDSoHu8Nz/f1V/cf5ozUhmW6L7/AJpvvtJ/6DVuNoZo1mgRVf5vu/8AxNPhhWGTzpkm+58u1NzbqfpNjtdrxU+f+JW/hr8ajT92585HFDLiN7m3Xypmf7y7Vb+GsfXLebyXd3Zm+6jKn3a6C+V7aFXl8tP+eUcaVgeJp3s7d32KAvzbf4q3jROyOYe9Y4DxUqNayOlyzLv2/wB3c1eYeKrpJLr50ZVVtrxr/DXpfi5PMhlSFI96/NtX7q15h4q3sxn+6rfM/wAnzM1dVGMInTDMOWNkYd5JuXekzRvu+b+KoGum3K/3V/iaq1xdXKyOm3dt++1V5fOZW+fC/e2q1dUfdicWJzKUpDru42yM6PGRv+9WPqU3mSedvZTs/v8Ay1PfXDyDy0fDN9xttZl8z/Km/d/e2/xVpKJ5dbGc3ulZZvLk+cKy/wAVT6XfbZmk+b/4ms+6ZJGCb1H+ytLZ3CfKm/b8/wB3+9WUo8xx/Wpc2h0+mz7ZCiOx3fwt/DXQafqSRxgvz/erjrW6SOPY/wB37v8Au1uaTcfvPJeeuWUeVs6KOI/mOr0+4hgk3w/8Cratb7z5vOeZmZfvfL8rVyNnefMmblSrfL/s1uWOpOZE+dW3LXFUj9o9CjWlsdj4fvPtEfnO6p833V+9XQWerfZ5A6PIybNqN/drhtPupvkwY1Hn/PIr7WX/AIDW9Y6ojM0cm3zf4JJP/Qax5Ym/tOaNj6W/ZF8Vf2l8QtK0HW/EO+1k1SNGhV9sX3q/Xb9r74e+H9Z8J+HvEtkzEeFrWJrWRW+WNWjxX4a/AnUrmHxxbTWcMnmNcQtF/F8277y/3a/Yz4i+NPFWtfstaD4q8T6fOsGsWq2cDN8v7yNfl/8AQa8PN8LX9leEeaJ6GT16EsbBTlyyufLXxx8VQ/8ACSBHeSWW62/dbdtrqfgvZ2Gn2MmL9T5lvuZVavF/id4sfT5Gmd2edpVWWaR/mXa33a7X4V+Mkh8M/b5rZYUZGRmZtv8AwKvz+o58vKfqdFx9pZnOftAePLDwrqypYXmfOn2Iqxf3v4q4m1+MGlaTp8t5fpsiji2v/emrjfj58WJv7cub+51KF910yxLs2syr/FXzr42+MlyrN9muZPMV2bdv2qu6vWwdGXLFI8zMqkOaTNb9pD4wQ61eSXXnSS7Xbyrf7vkrXyz4m8QzXl083nf8tWZVb+Guk+I3jq/1dX+0zSOzP88m771eYa9rgW48lNufup/tV9Hh6fNLlPgMxxyjLkLPmXOrXC2dr5hdn27q9a+GvwF03UrEf29tt3b5vMk+ZVrkvAdvo+kWcOq6leR+dJ/D/dr0HS/FifYXSG88pN23cv3q9KVSNP3IbnnUY+0lz1TE+JX7H9zqelteeGNYhl2/fhWvErj4K+PPDd43+gSFVba7R7mr6x8N+MLaxhR01Nm3L86t93dWlofiDR7fWIRNp9vMjfM7Mn8K/M1XTx8oR5ZRMsRgYzqc0JHjfwD/AGcfiR8VtcTw94e8MX15eQv88KxfMv8AtfNX2bf/AAw+I9/4Lj+Evg/daeJYraGwi+XJimi2rIMD0CPXef8ABLv49+Fda/a41WbVbW1SG4s1gt2ZFVV2r/dr074NXmk/8N8C/wBQt0ktD4x1N2jLfKV/0gjn8q/Y/CXFUa2U8SrltbCTv6ctQ+k4bjVpUa8m/s6fieB/Hr9jX9oHRf2XX0a78YXGqPI0dxq/mbmdo1+7GtfL3wV8Val4B8UR2E/mW81vOq/MzfKv+7X7+fH7SfDHijwf/ZWj6bCkFwu+VY13bv7u6vxT/wCCj/w3h/Z9/aKtNbs7Nrey1iVtyqvyLIq/3q/nn2dCdL2dM6KebV41Y1JS8j9LP+Cf/wAZH1LS7W1Fzsm2f6xpf9Ztr6f8Va/ZeI/9PuUVHZtyyN91a/LT/gnv8YodWkhtt8aOrbEkWX5q/QbRdal+xw2d75yeXErfvPutXz8uajTlCZ9Th5fWK/tS18WJIbXQYbaZ98HzNLtTd/3ytfml4w8RW3jLx9rGtveb/Mv5EiZm+VY1+VVr74+O3i59P8A6hqt5NthsbCaVVX5Wb5f4a/OHw/fvJZwwzbklm3Ovyf3m3fNX1PCGFipTqng8RYiPtYUjbs2hkhV0RXZk2vIv3Vq3Y2r28wMKLI397f8ALtqG3unbZNv3tu3eWv8A6FWto9vux5033l3fc/8AHa+85InjUakeTWRoWOn/AGrEyOy7XVvu/K1aEGnpIzzpMp3bm3fd/wC+aZp9q8iv+53N8rJGzfL/ALtbFrZzKzFE/wBd8m1U+7/u1py+4aSrc2sfskFnpb/fuSqI3yqv+7/FVmTT3/2m2pt2r/7LWhptil1tmufluG/iZ921au29vJJbNM6ZH8G5fvVrTjDYx9p7vMzjtQ8PwyMUhdYi23ytyfN/u1z2peHZrhZofs27b/tV6Hc6a9xJ8ltuib7+75tq1Tbw3NHMvkosKr8ybauNP4TmqS5o+h49rHh3c7w52uybdrfwtXJa54Z+8iJ5bq/9zbur3LU/CrpcSvsb92+5ZF/irlNU8JpcSPC9hI7796SN/DW1OPvHj1qh4xrHhHMZhRFxJ/EtdD8EtKGlDVI9pBZ4c+nAfpXSah4ddt1sk0e6N23KsTU7wxpLaWZy2QZQjFG6r1r9M8J1/wAZ5hX5VP8A03M6+GakZ8QUv+3v/SWfP3xe8NJdeMdYmhdhNLqMhTC/7RryfxN4T2tvuZmO776qvy19K+P/AA3Nc69eTblbzZ34H8K5/irzPxR4UtmWV3tsiRq+Nz+N84xX/Xyf/pTPnMfL/bqv+KX5s+ePEGjuZm5xt/h2VQt9Jm3K6IrN/tf3a9Z8TeD0VWuURh/s1zDeE7lZPkTf/stXhSic3MjK03R52Vk+X5v4q6bS9BRdruiqdu35av6LoM7L89tt/urXT6P4bdpF3plF+9HWXvS90rmM3R/CP7tXg2oWet2LwPbQyb02uqxfPtX5lrp9F8N20atvhkd/7u77tbdrocLTBHSSIt8zxx/equXlkZHBx+Ddyslmm5Nu7cy/NU9n4Zm270g+X7u1V/ir0q38N/a0byT8kcq7vk2s1aVv4Pe4X5EYf7Ozaq0csJEylM860/wS/wAvyNvXb/q23bq6LTfDKK+zydzr8qrJXoOm/D37ORMlg3zffmb5t3+1trX0rwKjXUk0ztt+780X3m/hrOVM2jUlE4HT/CLlhM9mw+XbtX7tXJPA9z9o2THYrfLub7q16NF4LS6VEHyGN/uq1adp4HsxGLZ7NijJ95q5qlOR1RqRPINS8EOqv9mhWVfK3Ksf8TLXNat8Pf3J89PMk+83+zX0JdeBbYLLM8MYeOL5WZPmWsLWvA8MjP8AOq+Yu35Yvut/tVEqfMbRqfynKQq6xqiSbW3tvaR/lWoJN9psRLbeJmb95G3y/wDAqJrh7ebHzGJlZU3fdX+7WfcahcybtiNlX+f5/u153LKJ+gx7k0cfnTK77c7mZmV6rapZw+T/AMfKxBv73/stTx3bvvezEKPs+X/d/wB6o7i6hffLc2yod6ruVt22q9nyrQupU93lkc9qVm7QvvSMoybfm/h/2q4/xEqNHMj7f7vmR/3a7e+leS1dLPbvbds8z7rLXHeKIY5tyfZsKr/P/D/vbaz9ieTWjy+8cPqTeXJs3sRSxzWzbfX7vzfxUupLFHmZJmRpPmT/AHapfbELIkPyv/z02/drKUeaBy832jbsZE2kof8AvqtjQ2kjkPOxPvLurnNNmkjVIXnXH95vvVq2d0kjCaF2YbG+Vqz9n7vvExknPmOh+3Ha77ONn/AqsrI8kLJ9xfK+833V3Viw6hDNC9tv3fut23+7/wACqWK6hhYW2/5VTb8zbqj2c+W3KXCpyyuWLiR7eP8A0lN+3+L/ANmrO1G+mjs2SF9xVdybvvN/tVYvrrcvk7ONyqjM9ZerSOtw77NqMm3ctVGMuawqlT+U978FzrP+zs06twdFvMH/AL+18q3lzDHEPsyMu35d26vqbwQY/wDhm19jZUaJejP080V8malMk2dkPz/e2/3Vr968VoXyTIP+wWH/AKTA9DP5JUMLf+Rfkindas/2hYXdWP8AeWs3UL7ywV37tvy1DfXXkyO/mY/u1kXmqpuw82HZv4q/I6R8TWrcpZutQSPbsdgn3tu+rEOveXbhEfd/tL91q56bUk3F32qFam298nzP527+8q1tHzOb2k/iOqh1JJJFeF1fd/47U39pbleFvutxu/2a5nS5N0i7H2lf7z1rR3CfKh3H5K1+GRHNzGqbzzmV33bl+/8APSw3E0395d3ytVKFk8zf/A38X8VXLRZ9rJv+9WUpFU/i0NKzkf8AjPzfw7auWt15cfycf7P92s2CZ4ZBDN93+9/DV21bd9x2K/drGUf5jvpx6m5DcLMyb9qKv8S/3qvWd9tmHz/KqtuXd8rVh2+FVZJ5lRGb5a0FvCxKb1Td91f4q5pRgd1Pmj7xt2t062aOj5kbds+T/wAdardnqMaQ7E27v4925lrm/t00e75Nu75vmq3Y6h8qI7L8rbkjrz60Tuo1I8x0C3DzbbK53Oi/d2p/47V5bj/SEmtvMRvvK23dWDHcTLH88zMv8XzVow3Tqqu4bH8ar91azlGXLoaVOU3JLqZSgQMoaX96zL96rdrIk0myFF/h/eR/8tKyLOZJr1EmSR0b5krUtYZo1M0PyIv/AH1urCUY8vxD+KZdWPz4diOqbX+8v96i8h2t9mR28qR12bfm+anGbdboju33P3rSfKtPVrxlGxGQqnyfJuXb/d3VnU54+6dMeWWxkXizLu8mXzPJRlRv4axNQt0khd0uWyqszLXS6hY+Ssps/LEf92P5vmrDurVwoguU/wBr5U20ox+0Wcvqdu6wujwqtxu3bpPu7dtcteWrxsXm5rufEVq6tshTc+35P7tctdWrzSO8MKvu+9t+Va66dT3blyjy7HKaxazblWN2Ufe2/wB2s26h3Mfn3N/erevLH7VMyP5ny/w1VuNPf+//ALq12U6nLoc/LzGB9lQbkT7rfxN96rljY4aMuvP92rbW6blQRqzL83zLV2xs/wDlm77lZN27+7SqVv5S6dGMfiLGm2Matv8AOVpf7ta9nCnmB4UZd397+Gq9nYwx+U/k5f7qsvzVqx2T2u5H6fe/4FXnSlE2lTgWre33SK+zDr8vy/xVqafC8c3nQpu3Ntb5Plqrbrtk3q+VkT+L5q1LGN1b53w/y7Y1p83LDQ5eX3y9p9rdbvkDff8Al+f7tb9nGgtxv3Ef6tNy/NurJ0+H7RtTfIEk++392tiyZI42tkmb5UVfMX5vm/3q4pXlL3Tqp+7ys0dNhmWREm2/IrL83y1pbf3iwpyv8W3+H/ZqnYx/apA86MzzL88jfdb/AHa2bRd8Z+dRti27WTbub+7WfNyxOmO4/wAmGSRZNm5mVmRm/hWtLS4UWWJ4dxXb8jM3y/8AAqo2zIyqkMMiyfxbvu1saLb3N5JFeQphV+VFV/lWrpxh8R0e0l9k6DTWhktv321om+55db+l6b+7R027JH3P/wDE1k6PapNEiTJ8zPu3M/y/8BrptJs/OZETb9752/vV6WHlze6c8qnNEsafpKQwuIYWBZtyNt+7WlbxusgdE3fLu+5T9PhuYY1h8xn2pteppLNI03zbirfLF5f8VdNPnLp1CXT5vm2eWwb+CSNvlqSPeszbHbZs2vti3f8AfVQW9ncxsz723r/Fs+X/AHa09LtLmGEvv80Kvz/Jt211xly+8VKX2h0Nl5y+dv8AvfcVk27f71T29i/l/Oih/vfN/FV61017hdlzNGwVF/1fys1W5rbFvsL+Vu/4FureM5ROSp70TktWhhlkV7kLtjdt8bfN/u1yOqad9qk+xzIzpvVn+WvQdUt4ZLaXf+7Vk/hTdXY/su/CVPFXixvGGt2dvNp8O37Gtw/+sZfvf7y152ZYilh6UqkzjjH2MD6N/wCCX/7IGm+CJE+NPxJtrV9YuNy6Tbybf9Fh2/eZf7zV+ieheI9KsLSO2u7lYxt+8z/LXxLp3xqs/DP+gabND5zQbPLb7qt/D/47XP8Ai79rTUtr6gqSW4X9xFIt1uVmVf4V/hr4mjm2JjjPbQPMx1OOJgoyP0Sutc023sft7XKiLs+75a+Yv2sviheWWl6q+k38OIWy+5vurXzov7fHiSPQbTRL7WFjSafa0kn3dq/8tF/2t1eZ/tIfHh/EngiXxDo9y13Nbz+VqNxNcfNMrf7P8K17GMxk83oq552GpxwdXnOM8ffHC8utUkRNV87zF27l+ZW+b7u7+Fqx7X44X9nb/wDH5Mkkn3FX5lavEvHXxB022b+yra/aSZn37o/u/wDAazNN+IU1hZ/Zv7S8pVfa/wDFXx9XLakp8qPtctziVOPxH1N4d+Oty9vs1W5VE2fuo/u7v9qpbz4i3PiSN7Cw1j7P8isjN95a+XNP+KUN9Iba5hZHjT5ZmlVfmWut0v4lQ+IIYrl9eVJWRvN2t821fu15OIwU6J9TRzql7I+jtB+IFta2z6bf6/5vz/vfl/8AHant/iRZ2ObOzv5PJ83dAzPt2/7NfPA8aX9vavDYXKjzt37xvm+b/ZrO1b4ieJNF0+K5h1iSRd/meTMm35vuttasPqs3H3RfXnUlpI+jdS+KVtqEySJNveFvk/u/8CoX4kaba3CTWfy+c6q21/vbv4mr500/4mQ6q6PDeMjqm64Vfl3VteH9evLr7keXhRl85flX73ys1ZRw/vHVHE+0peZ9IaT460pZP9JuWhmWVWabdu/4DXf+GfiBp6/Z3R2YyM32eRXX7v8Aer5f0/xU8McRmdcM22VYV/i/vVreD/HF5HYyLbP5Kea3kbf+edTOi1PmpnHWrQ5PhPRv2xv2J/gb+3F4fhtprlfDnxCVW/snxdGi+VI38MNz/eVv738Nfk38afg38Uf2efiJefCX42eFZNI1rT7hkRd3yXi/wzQt/wAtI2/vV+qdr8UvtVpbw/bJPI2/e2bW/wB2q37Snwx+HP7ZHwVk+G3xIto/7b02Bn8F+JpF/wBJ0+Zf+WbSfeaNv7rV9nkub1eT6vivlI8lVquGnzUvh/lPyUjhfaqbMn+D56u2qoqNC77lX7yt/D/s1qeNPh74n+GvjC/8DeMLNbe/sbpom/hWRf4ZF/3qoWqhV+f5gv3/AOKvYqPl0HKpGt7yLCtNJCqedt+dWX/apbXfNI01zDsVZdibqW3/AHKu8NywMn+xu21b8iGO3EKJvDfNub+GnGVonHKJm3kkMMZaFG/3W+9WPfW+6KV4fk2/wsv3q32hdWHmCPym+batULrT08kIhbDS/Oq/w1pzcsomfvnMzWIhX+JWb5vLVPlaqf2N5I/O8na3zfLu+7XSXFmJI/kTDL/D/eqrdaW8cf3G2sn+srb2nv3MPZx5TK0uzuZFH2aRleT+L+Ja7LwvYzW8yQ7923/nolY2n6Y+4bJtn8MUiptb/erpdHsZI2VJnbdJt+b/AHa7sPyyPNrylG521jCnyl5vNVUX/V/NXT2rfZ7z/XL8qfIyp/DWT4fhhmhRLaaHaz7kjjT+L+Kt61t/9HVJX+Vm+TcnzV6NOnCR5dat2LVrawybrq5m3Iqbljb71XraJRp4iRNo2EADjFV/nWVU8vDMm1mZPl/4D/tVctolhgEcW7Azt39evev3DwSio5vj7f8AQLU/9Kge1wxO+Mrf9e5fmiG38mb/AFL7Bt2qvzNt/wB2rLbFtWS2i+Tdtbc/zf7O6oWjeSRVSFtq/LuVquNYpHMv77en/PNvlr8g5mfHRqGdqESXAXZcyD91t2/wrWTfRzXUZ3uxTyt27+FttdDdQzX37mEsWj+/5ifw1j3yzeWqI8eyNNr7qs0jWl0PPfFy+XGUuX2M0X3q8r8UWvmW3nWbq0avuRmdvvV6x4wkSaFJkhX5mb7vzLu/vV5n4kjfa6Xnkl/vfu/lVWqoxlylxxB57fLLJJ8j7lb/AMdaq91JtjV3hw6/eZa1tQaG2ZvkXdu+fbWYypMzok+5W/i/u11fD7oqlafIY01w8kbd/mXYzJ93bWdfRvH++SH5meugutH8yRUcNhk27ao3WjuqMiRt8rbd33lWq5uX3Tikc7Mz+Z5OzP8AEtLC25jsTeG/h/2q0brR3WYL8zfLtqKPTdrNDs+9/EtTUj2IiuUfp8m2ZXmfG3+8v3q2rG6SGRJv4Nn3l/h/3qy/LRfkdGZl/hq3b/KrJHu/6Zba56kTppyN6zkfbvfaV27kjrStbrzI/n3ASLtrB02V7XbHNMy/wvurVt9nll3dv4di15eI5vhPUoy9z3TZsdWuYZEcJ91PvL/DXQaXN9ujWaYMwV1bb/7NXKwxzSLvR/mj+5tevUPgh8P7rxVqBd4WI37POZdrVz4en7SdmaVK0cNSlKR0vw71T/hD9c03xPeOyPb3Su7btystfuP+y94p8Pftq/sFX/ws0q/3a94biWXTvMX978q+ZDIv+98y1+O/xi+G+meFPCqabC6veNF80avu2rtrf/4Jtf8ABSXxV+xj8aNO1LXLy4m0yGX7Lf2twzN9qsWb95/wJfvL/u17/wBXpKjyo+UhjKs8Z7W56D+0do+sWsl5Z3NnJDfWtxtlj3/NHJ/Fup3wj/tWbwvc20yed+63xNv+Zdq/NXvP/BULQ/h/rnxc0n4/fCrVrS78LfELRo72C5g/1Zm2/Mvy/wAVeLfD3R0ghm037fsga3byF+6u3b91v71fk2d4L6pinBfCfuuS5j9fwEKq+L7R8V/tKfEy2s/Gl/C7srWtw0XlyJ825fvV89+IPHX26aV0ud7M7Nu316X+3pZ3/hn4jX9qjttml3Juf7zV82x6k/nb3dldf4f71e5luDpyoRkfOZ3mVWFeVI321Ca6mZ33YX/x6uY8U3U8OpLMi/w/I1aWm34mZUm+f/Zql4xXf5fOF+7ur0KEPZ1/ePjsRUc46SK9rr2p3GyFPm2/M9dt4Y1p5nSG5v8Ayv8AelrlfDekw+XvT7/8H+1XfeHdL8K68YrfWLNYivy+cvystd0vZSi00PC06svikd74T1DwlJCs154thVY0X5Wf5m/2a+hfgr8Ifhp8SvBtzrdt4wt5b2OJlt4Y/mbd/tV8leIv2edN8QN9p8E6rIVVdzR/aK1fhL+zr+1FHqyp4GuJi0m7b5dxt3bfm+7Xm1sLKXvUqp9HhYx5eSVJ/wCI+n/2bfgTrej/ABqS80fUoRcWsv8ArGn27v8AZVa988Bz6tp3xzjmjvSl5HqlzunzuO/EgLe/evizwX8J/wBtjUtQS80SHUIrlpWiaaOXazSbvurX1p8KZPiJ4d8WaSNPsBf+JrYiOSCVgPNuAhWTJ+u41+w+EWHqU8k4mlJ3vg5/+kVD6TK8PRhhq0YJpuL39GfYVn+0vNa6f/ZWvPI80Nvt27ttfAf/AAXU8eeG/GXw08Ia14e1JRPZ62Fe3+XzG3feavYf2vta8eeF/hTeeLbm5sbPUoYvPnWO48xo2/u7q/Kjx78RPHfxm16O48Z6xJfeXLuih3MyLX865Rhq8sYq0pe5E+TxUvY/up/Ez6G/4J8/Fi58P+Orezmv1hSSXdLI3zeZ/s/71frl8NfF02oaHbagnnPaTW+7bJ8zV+Mn7LPhXVdP8aWEypnbcK21l+7X61fAW+k/4Re1d3kaOGBV8lv4mrgzWUfrH7r7R9lw/UlChzTMf/goN8RLPwr8DW0HTZv9N1q6js3kkf8A1MLfM21f738NfH2gtCot9jrn/noy/dWvSf27Pie/jv4vR+GNKdW03Q7f/Slb70lwzfLt/wB1a850GB1ZHh8v5X3bpK/SOHcH9Xy+PN9o+RznGfWcwm4nV6eEaMJC+/yfm8zZ95a6DR7Uz4mdGRF5RVf5mrH0PHyB5oy//LXb91v9mum0eGGGRXSGP5n+Zq+kjH3Tzo4rl92RrabHNbtv+zM8jLsRW/iroLKFlUJs/dsny/xbWrN0+18zbc/vN2zcrL91a6Ox0iFY1WF/lb5nZf71aU6f2jf61L7JHDb/AGO8V/JUiRdqSM+3b/wGtCO1ea3MqJhvlR2jdV/8dp0OnpcNI9z9+OX5a1bXTxCqIlnt27dm1KvllzEVMRKMTKk0m8imST5R5bfP/u1X/sXd8k0EkXlvuRli3LJXWRaWjTL/AKNl2X7yp/49VyPQ3+SH7TuSP7m7+KumnT9w46mKnLY4HUvDu6Sa5tofJ8x9m3b/AOPVz+reGZt0kzx4ddy/N/er1680CGaNIXhYuv8AyzZ/masq48Lu0m+5dd+9m+7t21fs2cFatKR4nqHg94V87ydiyN+9kjXbuauc8SaONLulcSu3m54cYxj0/Ovcb7w+8W/f/E/ysyfw15d8YbD7Ff2mVILCTORjOCtfpHhUpLjnCX7VP/Tcz0+E534jpL/F/wCks8w1zw2t7dvOu5CRuKg431xXirwWHjkhjeOL+Lds3V7n/wAIzHd6Zb3UsDfPbj5x9K53WfB73CtCkMcoj3Oqtu/76r4/O4RlnWJX/Tyf/pTPn8fKX1+q/wC9L82fOfiDwTM1rsmdWeOVl/dxfMy/w7q5q48CvaM0/wBjYtsVv7q19Bax4NmMn7mKSbd/07/N8tc/qnw7trqQLNYNGVbft3turxJR5TllL+U8r03wrNHcbFhZ3Xarrt+7XV+GfDdreTLLc7Yk+b5Wrr7HwXGsfzpJv+9t27d1XdP8L20EZ2QMx+bZt/irl5eU1jIzLTw+kcafuVYM3yMq1vab4PhmukuUjVH3bHmki/hrU0nRZrfZ9mDFWRdkbfdWu00fw+7bYUeOWNfmeRfvbqn/ABEylE5O18OusabLb70v3v8A0Guk0Pwak2zfD80bbpY5E+9/wKur0/wyiuiXUMexfmSFf/Qq6PR/CMMiP5KfeRWdmp+zM5S5TkLXwTttB5z7vm3fu/4v9mtO38Jwxsv+h+bt+/JXaadoLtmZEX5fu/w1Ym0naqOnmbI02bV+61EuX4Qj/eOQtvB8MCvss4ZJvN3bvu1pW+jwyM3yKsUafdb5a3bjR5rhd7pnc3/j1OuLNJF2TIpb+FV/u1zy973jeMjmptHtpoXS2dS8ifxJXO6x4fhWx+SHb97zV/vV38lv5M37lF2/dVtn/oVYviKzSeQo6fdTajL83zNUcv2jXmPkbWNcRY2htod235E+b7q/3qZb3FmzJ8kfzfM0n96sNdUfcHmffIq7f3fy1PbzOvzo8iD70Ue3+GvPjH3veP1SXJE3ZpnhUPDe4Rl3bdv/AI7UV1HDuMMyZT7+5f4v9mqXnSNMNibQy7fmb+KmyTXLXSu7L+7/AL1KXuyFUlSUSWSOzyyfMjqv3WSuQ8UW7tHI95MyvJ8ybn+6v92uq1C5TzBC9zlV++y/ermvGF0kkMjo6uioyJuX5qiXunj4qVP3kedeIfmUOhyivt3bKyZLjcySbNp37dy/w1d8QTTeTvR8u331Ws6JoWVt7tv21ly/ZPMqSNKxa1kbzo/3rKnzLW5b3U0NuvkouyT/AL6WsfRtk0iIk25v4/krftbP5ofnZ/8AgFT7vwi5fd5izbrCsWya2bZtVvlqaSN7eIb4WQ/7vzU/R4YbfLumx1fc/wA3ytV64bbH/o0Pz7N25v4a05eWRXvS1MxpPM+eaaMhvuMyfdqlqUcKsiLNvT+Nv4a1Ly4hhRpkh3n+792szUWRkSVE2Mqbty1MYilyr7R7v4Kbd+zc7qSc6HenPr/ra+QNajmaNnR2+VtytX2B4Jbf+zgzJnnRL3H/AJFr5G1yRJLffIm3b975K/dvFLTJMh/7BY/+kwPU4jd8NhP8C/JHF6lNcjKO6kVj3Fx8xfYrCtfXNizP5P8AFWK1vt3vHu3L822vx+PvRPialQgkm8wLs+YNUdv+8k2D7392pfsb/wAH/AttTWdkI2MvzBl+b5lrWPUx5ZSkS2av52+ZOa2rOTdJtmTnZ/eqjb2Mqzecj8SfwtWrb2MLSfJ13f6ys5S5jSNORbtU8zZ2C7ldatQ/KyvLuyq7aZa2v2dVD7Xdm+etKOGFWWZ/MO7cvyr8tZylE6KdGew2G3kkb+//ALK1dhhaFV2W2TJt+VakjtZvs4e02iT5V+797+9V23sX3f6SF+ZNq7XrCVaB6MMORrbxrDv+bLN/ElEcm24Lvu/d/LuZank098/cY7t2756dHDDJbp97HyrurGVS5vGnKUhVH2mNfOfJ/wB6rNuu350+fy/4aS3tUVdkMf8AF8n+zWrY6R9nw/lq25fnrhlU5TvjRkyDTw7Lv+X7v3Wf71adizyTNv8A4k+8v8NMgs0VUdCwRvl/3q0rG33R7Jpv9rav8VZ+2Y5Yf4S7Yrtk3wjcjfJKq/e/3q0VZ4XXykklRfv/ACbW3VDptvtjVERQ3/j1a8NvIYV2TL8zs1Y7fZKVGUh2mqhU+c+d25nVv/Qatxvu27E2jYzfL/DTvsiR26uEy2+rCwolv5MM21lRtn+01c1SXMdNOjOPumVeWcLfI+4q38Uf8NZ+pWMdw2yH7m/bub+KupksZpFXYjFZFVfl+b+Gsy4jubiFZvO+bf8A98stR7TljzHTGicfrFq+Hd0+bdt2qvzbawtT0l4/4F+ZPvSV297ZpIvkuiu2/wCdt9Y+oWe5gjpwv8Vaxre6VKnJe9E4G80d4ZGmuU3hk3bqgm0fnznhVX27ol/vV1Wpaf5bKm9XDf8APP5t1VGsEWF4URQZF3bf4q3lWvuOOH9w5CTS3lja53+UW/iZfu1LZ6TN5hR33/7tb8mjoyrJ5P3fmVWpfsdssPzowlVfnVaca3vBKjH3bFW1t0hUJDym7a+2pYbzduREV9u7azLU726R4SFF+b5nkb+L/ZqvJJDHMrujIrfKv8VRF80uaUTmxXu7Fy286b/RvOVfm3eWq/eatXTV81R59ttbd8zM/wA1Ztq3lsJkfJbc23Z92r9jN5n75ZtjNL8jMn/oVFSUpXSOOKtys6HTVkgUpD8qK237/wAta+nxvbLvttvzSrv8usvSYUmJS5h81pPlRo/l2/8AAa19PjSSZf8Ax7+Hb/vVxSly6ndGP2TXsFFvCj/u2C7tyt97/eWtDTW2lHmdiZPvbqzre13N5MKZ3f8AjtaVsvmMz3Lsrt8v7uspcvNzo6I80tEadva2fmec7btrbtu/5v8Ad/3av6L/AKP/AKNNO2/733NqstZMdvdeZ+5mVkmT5vm/eVraQqW3l/aXaJf+mjbtrVtGQ4y97lOw0u3hbbMm1fL+bb/drrdHheaOJ4XaIsu3/e/2qwPDckMcfl3Pls3y7fk+auq0nTYYbtLxLmRHVNu3buVt1d9H3TnqS5tTQs99vIg370b5Nrf+hVakV5RG8O7asW1YasafDDMywpCzN97d/e/2auw2b+W6Rrt213U4++Tzcu8jLsbOZ4/PTl2+6y1tSW8lvGr+cwdXVmZaktdFeDdbIkmWdf8AdWrTae8Nsz2zqw+83+1XVGPNMmVSPKFrNcwsj71y3zeWybmZakkZAqzb5GRUZv3n3dzVUuIbmxZ5ryGbfsXypFf5V/3lql4o8RWfg/Q31vU900K/JFaw/ekk/hXbSlLl94uMYxXvSKN9ND4g8TWPgy2RW+1Sr9tWN/3kcP8AEy17LD4q0Hw3odnYeGN0Z0+38pYdnyqqttryn4NxwtY3HjbUEmttavpWWW3mXb5duv3VX+7WX488dTW+oTCGZvObd5XlvtX73zV8Tm9aeOr8kdkeVPEc2sT0Hxt8cv7J26t9v8t/ueS3zK3+1Xm+tfFt5NQe2eZndpWZFhf723+KvKfEnjy/1y8ubm83JB96JZH21x3iDx9c2cLecP3sf3FVv4q5sPg5ROOVSXKetap8WrmwjSbWNS81Ld28qbY3mR7v7tYGvfFpNWt3mg1KaNJPmlhZvnavHZvipNdXT2015v8AM271b/0GsDVtehuJvkmZBub95u+Za9ajTlH3eWyOGpKB1WoeLn1bUvtKQyJLI0kXzP8A6v8Au1SbxNqumxqIUV5lXO6T+KuM1bxdCyuiQ/NHt+b+KRqqt4yubrY/nKzfdaP/ANlpyw/wyjua06nKdlF423OZriZWeSVju2fMv+zWxoPxceGNLB/JtkZVR/L+b+L/AGq8wm1ZJI/Jtkx5n3938LULLc2Z/fbW+X5GWuHEUL/EdsMRVhrzH0F4Z+I0M0Ys7O5mfbKzSrN/D/dZf7y11LeItS1JY7DUkjuUX/VNH8u3/wCxr500HXNSWSHvJ/e+8zNXq/g/XtVvL3fczfIvzKrP92vCxlNUavMfSZfWnWja51FnHeWeobEhYbn3Iv8AC3+81d/b2qaa0NtD9omtJkX95M3977yr/wACrN8O2dhqVuk2n2bJtVftDTfxN/ervrPww8mm/aUh8xY9q+XGm7y/9qvP5qUo27nuU8PV+yOXS0t3RLKbymXaqL/E1dXpscOmwpHbTxod3/LZflVdtZVvp5tdQ+021szRsm1ZPvfd/wBmtm38P2euaa/9pSyPtf51VtrLtopx5fcOfGe1ia2jww31nsuUwu9WuGVNq7f9mr9vpWpNfO9nNhPmaKNvvrU3hfR4brVrbR97XT3FrviVV3Mqr95Wr0K18B6bcLbm2muCI0ZXXbtXc396u+GDnU9654NbGSp/4j4n/bw+EPiHxJoo8T21tHcX2kp5vmNF89xH/wA893+z96vkCKJIZGhhDMVav12+JnwbTxJpFxol+i3iSRbdqxfvIY6/LH46fCPVfgP8dNR+HWpQyRWd5K15oi/3o2+Zl3V7GBxU6l6M1sRRxHs5afaMmGZFUPM/yr97bV1fs0cgR93975azbNkNyiIn97za0IZHlUfuVlb7vlsu1q7Obm909OMftDprPzmEP7tDHt+Vfvbf71Rf2fcw7d9mx+9tZfut/tVpL9j87yY03Lt+9tqOGPEx852+aJv4N22lGOpqYt1pO6aZN/zfxstQSaakil3mYsybYlb7rba17iOZZo3ebc3/AC13fLuprIn2cedCyuv8TJ93/gNdTjzanHzRjzGJZ2LzTYmhZFX+Gt3RrG5hvPOublWSP5ait1+0QOkM2/zG+eRmrV0m3uY5khhgkcL8v3PlavVwsZHjYqUY7nZeG1hWGNIdqM0XzeX95q6CxVGj+07G+Vlbc396uW0uORYUmR2V1l+9s210Me+aBkaZV/v/AD7d3+1XdGieLVle5pWq225538tZd2/bJ/FuqxHCsECxEkAIM4OSOKpQttkijmh3N5X3o/7v95qvp5YYFHyuchge3rX7d4JyvnWPX/ULU/8ASoHu8Ju+Lrf9e5fmiWOSGFv3cPmfN95X27W21ZdXMbTfaI0fyvut8zbv96q1vC8Kyu8zfvF3bl209FS3jLukkg2fMrfeWvx2NT3uU+R5BGuXbT0tZpvlX5t2/wDirn9WvJriF9kKtufanz/+hVp6hvaNXh+7s+aNfvNWNqkkMymF0w7fNuV605mTy++cP4uXZl5nZdv/AHytea+KI0ZZH353bVr0vXkebzUdMqyfvdzfNXCavpv2mQ21zDs8v5dv8X+zV85pGPKefXGlvcSOkKMzs+2n2eivHGd9ts28fKn8VdZHoLzXDpbfK0fy7m+XdVuLwwi2/l2yMz/xtW0ZQH7PmOQk0FG+583mfxVRk0RNmxE3/P8A6vZ83+9XosPhU3kaeZujZU+6qU5vC6KrDyNyt8q7lq+b7MROjOR5Y3h0LcSh4cTKnz+Z/dqhdaLNGo2PtbZ/dr1ibwTMsnkyp8jf3k2/8CrO1Lwn57ND9jZVj+X7n3qFKcTKVLl+JnmMGlvIpjc5f+Nmp8Gm7W37M7V2qq12eoeC0hzNbJlf/Hqzl09LdVR4Wdlf5NtTUpy5JWLp+6YwtfLX7jMZE+VZPurVmPeW8tOWj/i/hauq0P4X+IfE1wf7Htmd1TcsarXMXGk3mk3Ettfow2y7WXY25fm+auCVGcjeOKhT6nU/Dnw3c+JNaTSk6zOuyNf4q+pPhb4Zt/AVwlzebfssa/6VJv3KrL81eG/AfxF8N9H8caakOqxm5mlVU8xNu1v4t1e3ftZeLLDwv8N7/R/D2pbb68t2g8tZf9XuX/WV04fD+z96XxHmY3GVakuX7J4l8Xv2pFvviJfHStYjmhjuGT5m+9XCeI/G3/CZM2t200cVzG25I1+ZdqrXzzr1rdeH9Sf7TqvmNJu37X3V1PgvUr+O3+02E2/au371dP2ji5ZH1r8Cf24fFvh34er8AfHN5HPoUN19q0O4un3Np8jfejXd/DXvfgH4sJeXFo7uzxsisy/w/wC9X5oeINceRn3p8y17B+zv+0LHMraPqV5JHcwr87SS/K22vkOJsr+sRVWB+gcIZzDCz+rT+0d3/wAFJNDs9U8cHX7BJClxFu+58qttr46utJvIZC7/APfVfVvx4+JWm+PtJgvL+5meS3+Vmb5ty/wrXjLafpWpbkS5jG7721a87KKkqeGUJI789w8a2Jcos86jjmhbf/49Ud8v9oTrbRorbfvbv4q63WfCP2GRXhT727+Cqmn+FftTb3/75r1qctj5lU5RdpRGaTZ+XboiQqp/g/2aZezzW7P5M2GWunh0V7e3VHTdIvy7mqva+DY7++VJNyn+9975qrmhz8x2+zvDlicnY+MPEmjzYttVuE/6Zxv96vUPhT+1V8SPBeoQ3lhK22P5Uk3bW2/xVT0X4K2Gvaglm9ysKr97zH+9/wACr66/Zl/4Js/Cvxd9gufE2tyOlwu91jTcse7+KuLFVMM/dmehgaOb05Xpv3SP9m39tq2v/E1tYeJNKmBaVmi2y/xf7Ne4fC3WI7n41Wmuxnylmv55l77QyuQP1xXpvh3/AIJV+Bvh/pMV/wCGNQW4SFfNWaa1Vm+avNvh74eZPjrD4aT5TDqtxCMDpsEg/pX614QKP9h8T8r0+pT/APSKh9vldTFVaUvbb2MT/gpl4jh0H9nbX9Re0Yrcr5cG77rN/s1+cfwN8Dtq1y07pv3bXZq/Yn9rj9mf/heHwXvfCX2b52i3W+5/vN975a+Avhn+zT4t+H91qFh4hs5oXt/lTd8zN81fzvg8bSw+AnTUvePl82w1SOOjKfwnT/AXwGYdct4fJjzG6s8nzbV/4FX1t46+Nln8IPha+qo8f2zylitVhb7szLtVtv8Adrx/4T+Gr3w/p/8Ab2sQ+THH+8lmb+FV/wDQq84+I3xGvvid4qmv7mRls4W8qwhjfb5i/wB5lroynAf2jX55fZMquYSw+F5IblGHUNSvtUudS1u/a7ubxmlnmb7zTN95q6PQbo/aFR7zc+3ci7Pu1z+k6fDDJvR5MK+75vm210uixw7ldPkWNfu7PmZq/UKPJCHLE+Xmm3zHY6XDDIpd4VCN8z/L8zN/s11+j2tz5yTbN0apufcv3v8AZrlNHU3Cqk1yzhfuRsn3f9qu20eK5VsTXKkKm5Pk+XdXfT96BjzS+0dT4Zt0Zt7usUTfMiyN8tdNpdnbX0KYRdituSRmrA8MqjPsSbLx/O2371dnpMc1xG29I03bdm3726t/hD20uhJDo7wxiF3jy3+1/DWnZ6clv89s8MkU0X3VX7tT2lm8zR3PkrEi/NtZPm3VdhhWFvOm8sKvzfLW5UqnYq2FmkbJ+5b5fvt/erYt9JtrjZMltCzfwrv+b/ep1nY/6R86fKzruVa1bPTXkZUd1AX7jfxbaIyOeUio2k20iuiQrGV/1W75qy7zw6jM7zc/w128empfWuIYdyq+1WqGbRYG8y5e2V/3u1JK6KfunBKoeX6x4bh2nzE81FX5V/irw/8AaR0/7Bf6SOf3kMrfP97qnWvqjWtBTa/7tf8AZVflr5z/AGxbOSz1HQRKSSYLjr7GOv0nwsSfG2FflU/9NyPa4Nk3xJRv2l/6Syp4f0Z7jwtp0iMyq9lDuCr975RWZqnhm8aZvN3INrOkka7VX/eWvR/BmjS3Pw20R44iC+nw7WK8fcFLqHhm5aU7I1dfu/7W6vj87Vs5xNv+fk//AEpni5hP/b6v+KX5s8b1bwukO7YjY2fJ/tVk3fgpGuE2JG/lpv8AMj/i/wD2a9i1HwqjL5IfY7fN92sa68LzQ7njRWCvt+X5q8OtGPKckZHmH/CJmNjvRWVvmWSo/wDhHoVt2uYYV2N8qN/dr0m50O2jWXZDsH3n/wBpqz28NyW+H8mMLI3+8qtXHKPMbxjy/CctpOhPHC7okZ8yL7sjbfmrstD8P7Fi2QqRJ/d/vU3S9DT7ZvmhZx8reX/tV12i6ci3CNNNs2/8s/4azkOT5iLSfD3lqrvbK4X/AJZqv3q6G08Mu3kuifN8rMu//wAdq7otrDJG6I+4fM/lr/yzaug0nSXupkfCpF8rNG3+1REzlzSMmHw26qERGJb+6ny0smhfZ48ojF/mXayf+PV19npm2NPJ5WP7jf3aJrNG3/aZPlbo395qmp/MEZfzHGyad5cex4ZG3Lt+b5m3f/E1n3Vr9lby3kUqybfL2/xV1uoafDHbj528xm2pH/C3/Aqy7rSoWvHh8lXPzL5f+1/s1hL3ionI3Fnsj2TbYtzbt2z7v+1WTqFukaskNgzuq7vMrurzw/MyxPCiqv3XXf8AMtZF5paR3iwzJvjb5nZW+6tTKoan5uQzPMu+H5X3/ulq1as8f7533bf+WLM25qwbG8vLVndP3X8UW371XrGd75ldyodfl3Vyy/mP1CWIjKldmurX7BPLTa/8KyN8rVJ9tigRtm4v/Eu/dUFmr/aPtME25mXZub5ttSSQJbun7ltzfKkmzbWceQ8+tiOaPuhcfvlM3ylV++2+uS8VXzq0lzDJt2/KitW9qV19lkOzy5EXlpF/vf7Vcf4gm85me56MrbmX+Gs5SPN5pc3McnqRupvuIu1v71Jptm/2pYLlG+/t/wBqpVt5pNk2/cPl+b+7W7o+mw7t72yuW/hb+H/gVc0pco6cfae8SabpdtDIltbQsVX5vm/iroLHT5FkXenDfMm7+9RpOlzRys/zY2fPt+9W9Db20i/ZpE2rIv3v4lpQ5feHyGa0fkqyfZt27+JUqX7P9ojVHtmfb8vyvt/76qb51kWL5dvm/eb73+ytQ3C3NxHM7wq3lt/q9u6r9n7uge0k5amZeW8KsOwb5mWsbUP3iy7NzN/AtbV15jRnzkkt1jT5I2i+7VC8kgjtGuUTft+X5WqqXNH3TOUYy8j27wVgfs1vg5xod70/7a18iaxE7Qsjuyov8VfXXgtz/wAM0ySSNk/2FfEn/v7XyJeM8xfZyNu7a33a/dPFBWybIf8AsFj/AOkwPW4jlGOFwl/5F+SOM1aF2b/XMG+9838VUfsczMkmznZ8+2trULcfaG3vgf3W+7Vfb919+Nv8Vfj0tj4upGUinDa7T88P3quLB5n7nr/fp0dn50y8bm3fPtrRsUTaZk+6r7W+So5kdVGiV4bXavyJurVsbG52xO6KgVtyMv8Ae/2qmgtoWcIm3ZH99lrSjsXZU2TNj5d9c9SpynVHBy7Edtpbr84RSd+5mq5b6fatI33sbPl3Vp2dm8sw8mP/AHG3/eqwumgR73fY27+KuaVTmjrI6qeFlzRK9lb/ALxSn/LNP87ql+ywvNG77nP3n8t/lX/ZqRbOZpNmxU2/xL/FVy3sHkbenlqv97+9XHKpKPwnpqhHm+EhjsYWO/8Aebo/vrJU0Nqkcmzydrt95Wq/BCYVh2bnP3WbZu3VZjt4WWHzn+Wb+JvvNtauOVaf2jtp4VfFIpw2MKws6Q/8B/8AiquQWNyzfvk+ZV3bV/u1fjtdsmx/4fmRauWOnzTEu9ssK7fvLUyre6dEcP7xRt7dEyny4j+/u/hq5Dp/lTJ5M3muvzOqrVhrGGObyZvmfYzJu+78taGmKnkyzOipIrbIt33qz9tLluFTD82hLp9jbLIqI+5mi+dtvzLV/TdNdpGhmRdrfLtb+6v/ALNRa2Lxqmx42+RV/wBpm/vVrWcbyqsKQxqy7vNZvvVnUrcsviD6tIS1s442WHyMhn+TdU66fNDI81zCyLJuaJamt7Xy1HnI3/Af4asMzrGn3nZV2rJWEqnve6bex5YxKE0ZVo5rZG3bdysr/eWqEweFghhVPvbtyVsXTQCBYYH2CP8Aur/31VbVLN47dZn3bfvLTjLmL5Z8hy19DNHM6Q+XvX5vlX+Gsa8he4kL3MPnNH8y7k+Vv92uu1bTYbpXmSTduX5GX5a5/ULNrht77R/dXdWnukcsonNXFukjH7NCqNJ/47UFxGjbEmRsxuyfd+9W3dWsMMs32naNsqtuj/u0xrO88v54967922tvae4ZS7GHHZzNI/3Y0X+H+98tMWN2jdI/mZU2u1bMdrC0L3PnK33t0a/dWq8cSKrbIVUN95mojH7RnKp9kxLqPzV+Taj/AHdtVGhvJFZHTYy/Kv8AtVs3lq8B+5/tfcqs1uklykw+ZmTbuVPu10xlb7J5lSXNLlZBa28zSeZcopP8TfdVlra0ezea437FRVRm+/8Aw1Bo8KSN5ezG3+HZu21sadYu0w3tuVUb7v8AF/tVlUlyy0RFOPM9ZFrSY5Jp97w4P3d1dHY2cLbnmeNkkX5W+b5mqjbx20eN6M8i/Oqr81bWmx7meHfGF3bkXZXHzc0eaR6FKNqliSPT38tEtvk3bd+75dq/xVfhs5o42hhdlRfu7vvM1WoY4fL/AHPzOyfNGybvMq7Hp800nmeTlflX94n3ax9pKR2RjDm0KlrazSzLcvw+z7rfw1v6TYpcKHdM/Nu3bKit9PSaNbZ/Lfd/31W3pWkvcKh85l3S/wCrb+GtY+9ykShKL3NrSbeGRvOTpD8ny/3m/vV2+j2u6FA+4lfl+auY0uwS3/fbGab5vlX/ANCWur8OQ+XGkLvIUbbvb+L5q9bCx5oHnVpSpyNqztb+Fm8mHafveYyfdX+7Wtp+m+ZKghSQ7ovvL92Sp9Lt9tqybNyt8v7z+KtzQ9NuLe2S2udq+ZtZ2+6u3/Zr06NOWxwyrGfZaXeeWXfbt/5aqv3auR6bFDjiSZ/mVv4du6t2z0tG3wrwiuv3v7tXofDaTTulym7dt8qNf/Qq6+X3iIVpS0OPutLSa2aG5dnWT5W/2f8AZrjtT8Mv4m8Yf2NZ6rCkdi6u9vN/E38P+7XrfirQ303w7fTb4UZV2xSSf89G+Va5ux+Htt4Ft7bVdYT7Pef6q6WR1bzm3fe8z722vEzrERw9C38xVfETl+7MTx5dQWuhszpa2lzvVEaH7zN/F/u/3q8C1q6vI9auLm/vPMfb8jM/yxr/AHa7j4uWd/Z6lqdhO8bzTS7d3m7v+Bbq83urW5vlj0ewtmeRom3eZ91W3V8pQUpbHFL3vdOe8bWN5NZpPawx7FiZ/wDZ3f3q838YTGOFpobndc7F3ei16v4uW80XS4dEvLnesbblWOL5m+X7u6uAvvC9zrgTPnR+Y+3ayfK3+9XVRqRjPyCpGUocpwEOmpJdrvRWeF/NlkZ/utVDUr+S4vlmtk4+47fxN/tV6G3w9uby1EKuquz7V3Nt+b/a/wBmsnUdD0rSY0s9Vv7X7W27zZI/+Wf+zXrxlQlI4KlOUYHAeIrKG1kifzpJkZN26Ntu2s1Y3tYpX+0tvVt21mrqtet7G1kR9/mBvmdv4dv+zXLapqENxL+4SN/7jbvmWolKEjL3ojvO1Web5H3Rybdnz/NXQaPYa9JGdh80bvl3L/DXP6XqFhK2x5sS7921vl212ek606sjpCqQt/t1wYyo6cYnXh/3kviNLQ7waVMX/drc7du2RvlWu/8AA+uTLIHudr3DbV2qn/j1clayaVqGIYZrfd99Gk/vVoaXq02m33k3OpQskjf8s/4a+eryjWlK59nldqUo8x7v4Z8TTW0Ze5+5s/er/Dt/vV7X8JfG2la5o7Wf7mUbd3mN/er5NsfEDsv7nVW2sjL8392uy+G/ji88M3CWVtfraJ5q/Nv+Vt1eNiOWn7p9vQq0oy5e59VR6DZyKtzFCspj3bfLfatVZNH0/RdWtr+GFmhkb/R/MlZmkb+Jv9pawvAPjL7ZpOy/vI0MMrLtX5d3+1Q3ipJr5YrmbeluzeV8zf8AjtTRrcs/eNa2FhWPq/wL4N8Pa1qFt4h0ezWK8ktVR5I28uONf4vlr0S3+HsMccsKWEm1n2o25f8Avqvm39nf4mWGpeKrOzubyZotvyRzfdjb/wBmr7t8HaX4f1jQEfR4hM6xL/pTNtVv+A17uBrVK0LwkfDZ7lcacuZnkV98NbbS7lLm2voXlb5Z1+823b91q+O/+Cs37Fd58RPAdx4z8AabHZ6jocX26CNkZpJFjXcyq391q+/fH3h3R/D6y3V1CsJV9zeX8qyfLXN6lqWia9pAvNes1vbab/Q/LZty/vFZdzVvLEezr899jx6WEnKN/sn89lrqE01nDc3On/Z3miXf833WrVt5HWPfDDtljVVfzPvfN/FXpv7aHwTm+C37RGr+GDprNpdx+/sLxU+ST5m3ba87t5Ps5/cJhf4d1erTqe2ipLqevT5+QmzdSMEd9w2bd23+GlkkuYWlmmtv3G3bFMr7dzU6OV2ZbZ/MV2Xcu37rUy437Ve5h+Rv/HV/2q3px98uVSJBcQpJvtpk3nbu3M/8VN2eTIHeZlXd8256hkupvtDuj/7K+Z/tUBoZrh7Z3Vnj+b/Zrrpxl8Jw1JQ+IkhW58tHhRfN+ZXXZ8tdBose7Y+9lk3f3vlX5axLVfOm2Qo27b/u10mkxosnk214odfllZl+9Xq4ePKeZiOV8rubOjyJHdfZp929UX5m+6y1tx2MEMOYYVkb7+1vmrM0/ZIqpv2bfvq33Wrdsyb6NIZkUeX/ABK+1mWuqMvtHmVI/EmETTeXE80zDc6r5i/dX/gNXo42B8qfaSGKnb0IzUK2L28m+GbDN8ryfw7aktUnVFj2nzAcAZ754r9q8E4xjnWPt/0C1P8A0qB7vC0eXFVl/wBO5fmjQtVhVpNkMYC/Kit823+9SMySTNcojN5fy7W+6y/3qVdn2hJvs23/AHk+7UTXfmKqD5n3/NGvy7f7vzV+Iy5ovQ+a5fdKd5sjs2dNrS/Ns/2f7tc1qm9nYb5MNt3+WldCsP2hmCIu7+L+81Z2oWcNqyuJtsf3XX/araPuwH7Pm+ycXq2kpFHcOiMzr/y02fM1czq1mImZ4drs3+t/vL/vV6Bq9r9lkESPv/2v96sn+xPMuGdIFUN9/an3mpxl73KafV+bY5XR/Cs1wu+bdlfmRV/5aV0mi+C0uI0+zW0kok/1u75dv+1XX+H/AA35ipC6SebC67VWL/0Ku20jwe7pFNsjI3fxL826u2jH3jT6vy6Hm9r4DhazTfZ8Kv8AF95m3UN8P3Yr/oeUjfcklexx+DUuJvntmE0cvzeWn3v92luvA9tbx74Y5JPMl+638NdHu05kypT+0eK3XhD5Wgez3Rt95l+9XP6h4TS181I7ZmXZt3f3v92vfZvA8NtZ+XNCqybm/wBrbWJr3glLXfcPDCU2f6z+7/tLS5oyOeVPljeR8/Xng/arQzW3+kfe/dt/47TPDvw1m1TVksktmmaRljiWNNzbm/hr0rWtNhvl2aDZ+cyttuLj+GNf7zVc0fxp4S+Gtrv8PW32/WfK2pfRptjt2+78taqMYx1PJxWIjT+EvQ6HoP7Pfgu+trxIz4gvlVZ4V/5d4f7rf7VfL3xO8UW11qVzc2yQ/N/Cq/xV6T8QrrxV4u1Bry/uZNm/c80jtukZvvVwGv6LolvCEmvFLf7SUvi1Z5/PKUjyXUpb+a4W8015Eljfcm1f4q1td+L3jDX7NdE168uLiVYvkkZ/4as+KNctoXYWEKsqy7VZU/8AHq4vVvEDxSbH25/2ajl9/mNI8xwXjaO/kvC81zkq38VXfhr4qubFntpvuM2395UPjRvtUjFNpXZuTbXNWtxcwtvR8Or/AHt9XH+6OXmel641s0bujq4ZdztWBY6lc6Lqi6lZvt+T96qt96oND8SPdW/2aZ/mX+Km3kKMrTfKV+7RKMKnuyHGpOlPmiem6x4g1WTw7DqTpus5tv77/arndN8Y3drdN/q9jfd+SvTP2E/Fnw38Ra5N+z98YLOGPRPFG21t9Wm/1mn3TN+7kX/Zrn/2zv2SfiR+xj8XJ/Afjl2u9OuH8/RtWhX91eQt91lavMrZVS5ZTpRPWo51V5488il/wkyX1q8KPGzN99tn/oNWPDeqJDdLZ71YbfkZl3V5xDq1zGqok2f4vmrV03WpGm85/kZf4d1eJKj7Pmcj06eKUpczPSdYntpLUI6Kq/xt/wCg0zRdRSGT7T8qbfl+WuIm8WblW1f5f/HqSHxE8MezG1t25Pm+9WVOhOULHcsbScj0/TdesLi8SaG88qZZfm/utX2r+yP8ZP7PtdP0F5lk23EbeYv3W3fw1+c3hvxJPcX3+kzL+8bdu219Q/s0+JLizuLP7HMvyyqvzPt+X+9Xl5hTnGOp9Dk+MpVpcvMftJ8NfiBpXijQX0jUpoXCxK1u2/a23+7Xxf8ADo2i/tiuZwghHifUchzgYzNitD4Q/FS5sZkea8aaBty7Y5drMv8AerkvhvqS3X7QkOrM+8S6vdSlnP3gwkOT+dfrngvVcuH+Kb9MFP8A9IqH1+HhShdxZ9V614ss5dS5eOKFX/dNv/8AHq8H+K3h+w8QeOBc2aKltJuWWRdu5l/3q7L4saf4k1LTQdBGx5vlVl/8e2159qVvqvhPwvfa/wCM7zyYrW1bbGvzM0n8LV/LVCM6uIvH7R89mFSNSrblPEP2ofilYTTxfD3w3N8lqm66kWdd3/XP5a800GG18tprxGD71+X/AHqzLrUpfEGtzarNt824Zt25f4d1bOlw21xM73k3k/dVK/ZMow9LCYeK+0fJYyd6tzY0ux+zTbJtvyt/ndXR6bBtk2Rwb/7qr/E1YunWrmPZ9s3J/GrN96uh0tUtWhRCsq7fkkV/utX0FPkkeNKR1fheOaPy98DK/lbXaaVf/Ha7LSWmhXZCWR1ZdzN8ystcZpt5bLiREkdf41bau3/drorHWLZY2RN25Zf7ny13U/g905ZShI7nw7J5l0jzQ53bvNbf8qtt+Wup0GSe4sY7l/LZ5P4m/wBmuC03WEVvJeZVDbdi/wATNXVafqkLKvkP/q/mf+61bRlzC96J3WmzvGuyHywv3dyv95a0LGRJ5D5CL5qv+9WT5q5XT9UT5N7/ADfe+atSG+S3ka8hkXYqLvbd81a/CZ80v5jp7OQxwqkN4u6SX5m+9W3p/kzRuiJICzt5Sr/EtcpY6hMzjyXhwv8Arfk+Za6PR9UhVkdJPlZ6uJjUl9k6/SfJnt0y+11T541/iWrlxGnlh4YVXa+5FX5qzNPuraKb9zMu5vm+58yrWh9oh3K+/G5d23bW8fh5jjl7plalpv7p5vlLsn3m+7XzD+3hbSWeteHLaaSNpBa3Bcx+5jNfUF1fbbiWG2mVwvytHIn3Wr5k/b4Yyax4akZFDG3ut2zp1i6V+j+FKtxthvSf/puR9Fwc4PiWjb+9/wCkSPQPhVp3274UeHxlAF0eDJPUZQVe1Hw+iw/wptTbuVPmb/aq58FoFl+EXhuRQpC6Hb/J/ebYK1brTbw/8e1qz+Y3zRs/3Vr5PPP+Rtif+vk//SmfPY+X/ClW/wAUvzZ5/faPDNJKjWzfudu7dF8rLWdqHh9LdiiWcfzffZn+Zf8AZ213MypH5ibM+X/C38VUNUsEmG+5h+dvm3M9eDW2JpyPPtS8P2ccbw2ybXX+Ksu+s/Mj8nzpPl2r5bLXX61bxvveF9rr/d/iWsK88mF22TtIFX5tvy1wyNfi2KGn6Z+7RIdqv/HI33t1dLpGn+WqO6bf9nd/6FWMtxNJGjwIy+X8v91mrpPD7Q3EexPOTd/eT5Was/fA1tH010jRPJVPMl2o3/PStiPZGFT5k/e7W3fLTrGNJLdZvJ37dqp8+1qWa38yTfN5JTb8+5vutVfY1MZS/lLcV6n2na+3Yv3o4/l3UT3CNcNDs2rv/hfctZUWpJHI0KfNM3zIrfepW1JLfd+8UH+7WVSXKSS6hHcxyNND5eGTdtkf7v8As1mX29mL2yKryMvlNu+7/ean32qQyTbEm+VotqNIi/NVaGbzmi+Rf7yK38NRL3tjaMixcWs0zeSkm/8AvySfxVWbw+kkbvO+Ts+793dW1ptvNJGj3iKob5nZXqe60vzFd403Bvu7n+7WMom0D8drW+S4ZH8/59u5Fatax8mHDpyzfNurnbJXjkjE0Ma7fl/3f9qt7T3dl3o+N3zJ/vV5vtD7ipiJS5jUhuHsbpN+1lkf/d+b+7Us0011H50d/Hv+b93I1VWvJlZvJ4lj2l/97+9Ve8uvLX7T8pdn3I393+9VVKhzxpuRnatePskCTM7/AGj5lb+H/ZrntQmdg/zso/3PlWtrUmmmn3xztmbd/H8tZjQ/K6Q/MWTd+8+6zVh7bmj7xcaJQs7FJPmRP9lG/vV0Ghw+XdIk21WX+Gqlnbw2bMk23d97/darenyWzKXfcPm3Iy/w1jzIqPLHludDZW/kRmZH+Vk/esv3ttT27QsVudjK8f8ADt21W0ybzIzM/wAu5du5qka6SPCPzuXbub+9/s10RiTUlCIqzTRtve5XZI+1Vki+ZaikaaRNifKzLtdm/u02adIV87Yvy7WZd/8A47Ucl0jqEmhVkm+ZF/i21pH3vdOaUipqGy4j/ffP8m1Jo3rC1aSKzhaG2hX7nz/7LVp310iyNCkPyKvy7X+9XN6ndbn2PtZm+bbt+9WtOMI7EVJH0L4Dcn9mNnI/5gV9x/39r5EvLjhXmdkO75P71fW/w+AX9lxtpJ/4kV/jPbmbivjnVNSdpNj7WOz+H+Kv2zxRV8lyH/sFj/6TA9biRp4XBp/8+1+SM3Uo08x7jfn5/mqsq7ZFdE3JRMzySNC+7C/9805WhXYnk/8AAq/GD5unH7Mi7DZbtjoiov3mX+9V2wt4X+T94u5Nvy/w1Ss50WZe277q1raX50LeZsYrv/4FWVSR34enYv2cKWsfko652/w1r2Nu7bHmiVdz7dqr/wCPVTswn+p6H/dre021mST9yjH5d25q86tU5feZ7NKhzbGjaWO0LsRv+ArVmbTYfLV4U+Rm2/3tv+1T9Ftdmdk33X+dW+9Wu9jI0QSbazb9rs38Vccqx6csLDksYElj5cy+S7bmXbTrO1MczIn3vvPGyfe/2q3bizSOZX+/5fypueq0luisu+H73zfKtctSp7xEKMea5Ts12yJNCjbmXbu/hrStbHdMzw2zN86tuamR6bsXZNc7Yt22Jl/iq9HJDHvhhTajbfKVm+7WMqnN7p6NGjHdkUlq8VwvnO3D/wAP8VX7VZlX9zMrBfvr/dqBbWGT5JnZkV/4f71TxK/mHy5t3ybfu7aUqn2TdU/7xMq+QPueYjfd/i/3qv2ckMdwmxF+6v3U+9WfHdv8v2mZdv3UVa0tPnRmTYjfK25mX+Gp5kX7GPN8Jq2tvCrDyIZLhf8A0GtCxdEmTyYWbb/sVSsxC7bIZd/z7t0f8Na8LfZ4U8652/7qfNtrOPvBKjMkjmmb3PmtvVk2qv8Ad21JJ5jhEtnXaq7XX/2aljjQS796h1f/ANlpJpIYZG8l2Z12/e+Wn/DMPZ8xJNJ5Mi3Lwxt8ir5a/wCs3f7VVNT/ANcE+x7mkXcy/wAK1LcT+XumttpZl+dmXczVVZXkb7+1f4/MXdR7xZQkS5+yqgRYXVv3qqu75f4axtR03zCfJdUZXbezL/rF/wBmukktZnkVPlVdm7d97d/dqv8AZbwTTP8Ad3fP8zf+g1vT97Y5JS5fdOSns4VVoY/MKq+7a3zUyb7TaxbJnUpJ97+L/vmuhvtL3R/Oi7JPm3b/AL1Zk2kpGvyJ/Fubb/EtVGMFscdapIxHs7lIV2Ivzbt6rVO5tfLZkhTc33n8z+Fv9mt2Sze4ZkhdURX3/wC1/tVV+zzTXCwpD/eX5l/8eraPxnFUlKUdDJWHazI80bf3m/iVqj+zwzbZ4XV5P4f9qtKS1n3Sp5MZ2vt+b71VdxRtk0Ko0fzp8lbQ5ubmZySkQ6XZzWZfyY1USRf6tvuq1blnst3CD5/kVHkX5qzrG3tpJHmRFRfvNWhptukczfO3m/df+6y1jiI8xth/eNuFVt5Gmk2lmRVVdm3dWrp8iLIqbI938G7+Ksm1ieR/Jm+VPuxf3l/2q2obPzlXfyisrPu+VVbb/DXBLm5fhO6n8Rr2az3qpsTLSPh/l+XdW1DC6tvfj/2Zf4qy7PfGhcvgr9zb93dWxoMkLbo/3bq3yozfw0R5Oa3Kd32OYv6fawSSfuYflb5vMVvl210em2tnJILxE27flXanzNWbpum/Z2Xy03p/Guz7q10ej2SWqom+QKr/ALr5q7KNLqjnre7EtW9u+7HyiX+Fv7q11nh9YVkjffub5vm+7trM0tUm83z0Z13fvdybWat/Q7GY7fnXbHK2/cnzbf4a9nCx5fdPLxEpcvMdP4dl86QoXj2/xr95v96uls13Qs0yYXftiXZu3Vy3h+N2medAw/vN/wAC+7XXabInmrNC7bV+/Htr16ceU8mUpc8jZ0+N5IfO2Rqq/fZf4q3tPhtvmR9x875YpNu1lrP0dra6mR0RZ0X5dqr8rbq29Nt2a3+R1ZfuV0cvuj8kZvijw1D4im07R9jbFulnuIV+bzlX+9XM/Gy1v9S1y4mtbO3a2tYl8r+Flb+Fa9C168+w6em+5hiNvas6SeVukjWvK/FGqalqmmh9Vto3W8uFWWSPcvyr/FX5/wAQ1JfXbfZIpylUnc8X8eeHZta1ybWLb5FV1WWNX+62371cpJ4ZexvDeQ22ySb5ZZFf/wAerufF2nzN4gFn9sWG0WXc25du6s34gK9uW1CwRo08pYov7jSf+y140Z8kdDX2c/anCeLrG51BbPTYUzFDFueTbt3N/F81c7rmh6Vo9xb3J3Mm/dcRzP8AKzL/ABV1Hi37Tp+mvcwzbxtVXX/0LbXnmuapNHbyec6sv8PmfM1KnU925208PJHH+OteeHVnuUvFmXzf3Xlt8qrXAXF9f6lrTzTfvdv3lX7zVf8AF1xbbpHkfbt3b4/vLXF33ixLWP7NZu25UVmaP79elRqU1DzPNxFOUi94pu3Wb/SXjjSaJWVZH+aua1BnuL5Utn3/ACfdVayLzXLm6uH865bYvzIrUln4iextxIjru3/e/irqp+7Gxx1Ixeo+4kuVvEm3qJd+1m+9V688Y3NrE9sk25FRfmb5dv8Au1nfbLa6ZLmG5Vfm+633m/2mpdc0u2uLdZvOVt391f8A0Ks5QjUiuZkU4zj7w/T/AB1qsjecl4yOv3Nr/LXTeHfHF/HeIl5DvWRW82SR/u1wcdu9nHsS2VlX5ty05fEV5br+7Rvlb5GrhrYKnL3oo9Cjip05R5pHvmg+Pvstiz3OpKv7rb+5i3sv92uq8G+OLnct+k0LIzK3mXD/AHW/u7a+b9N8ZO+62eZQW/i2/LXY+F/E1gq7Jnkd2+4u793XkYjC8vvSPrsHm0JRjeR9g+Cfixpt9dLazX+2WaL7sn8W3+7XoUnjbzo4kv7a3hWP/ln/AOzbq+V/hb40sLm7hTUtSsYnj+W3mZtzf8Cr3Dwr4ZsfiRdIlz4h2Sr/AKpreX5WX+9Xh4iLjPm6H2GHxP1ilzQ2PbPgb8XvD2k+K4rO5hZtr7XkZNyqv96v0V+EvjXwS/h3Sdam8QRyHd5SRRy7V/3Wr8ytD+DWq/C/xBJqWy6u2W3Votr+Y0n8Vfbv7MPiDwV8QPA9nZ23l22pW67GtWXay/8A2VVQxUcLpHqcmOnSxVLlke9fEm5XXkNnpTxzwrubc0vyrXi/jBr/AE+5s9BFk0TSSxsixq2yuzuvBOpeHrq41J/Ekjxxtt8n7ytu+9Whpuj6d4muLC8lf/j3n/f/APTSP+7U1sd+/wDfPNq5fD6tFwex+cn/AAWe+FltoEnhL4hWdm0Dx38lrK0b71aSRd21q+JJFh+dJn3/ACKv39qs1fpH/wAFydPkvvhBaa0ty0aWviq1eKGOL5Nu1lZq/NqOW2WH5IfvV9dklT22D5vM4a9OeHlb+6TR3B3LDsVJVT5P4tq/3aqXlw0jL+53bvl3K+5f+BUt9HtYXNtbb327d2/a1Q3Vx9mjbYfkb71e7GJ58pe6JhPJV03A/eaRvvVY02HzJH859yt97/4mqdvM91j7rBv4v7taVjbyXDo+9UT7v3PlrooxnE5akixpNql1JLNCjE7vlX+7XRWNnD5j7JG2/wC0vzVSs7ZNqbvmbY3y+Uytu/2a3NP0maPZ8m4f3mr1acfcOCp/hJtN+aMb/wC9uSNvlatrTZHWZSibv9pvmaqmnw+Ym/ztxXd95P8Ax6rDM9o8To+6Jv4dtb8hyVP5TV8x2UwRuro3yyrTnAZyqPuz3A61QhuraGRnh+T5/nZv71W42IgDOwchfmKdCe9ftPgpHlzvHr/qFqf+lQPoOGl/tNX/AAP80W7W6e3kZ/l3bNu5n/hqG4V1uns5vnh3L96L5vu/3qqTagkLi2hfci/dZqurN5kKPcvuVmX5t/y7q/FfZ+8fMRj7xE0KQqdm5Ny7kX+9VGUw3ELXNs+1W+5u/vVbkv8AzJJUEGWX5vlqgt9uk8nYvlw/Ntb7qrUSlOMdTejR9pLQp3EaMuxLZcq25JN38VaOi6Dc31wj36K3zf8ALP7zNTNLsXuLhJng2RK/ybW+Zq9B8D+F/MxvmZl+bylk+9urSjHmPUjg/ZxViz4b8Jpu37I/m+aWTZ8zf3Vrr9J8NzXStvdVLLvTan/oVaPhXwv8qXLpGm196f8AxNddHoPmW5e2RY2j/i2/w13xlyx0IlT7HKWOhwyQ+fCnyyP/AHdu7/gVSX3h+2sbf7TfoqRw/K9wz7dtavi34heD/Celu80P2iWNNzxqnyrXgHj/AONWveKLpraFGuEkbbb28K7VVf8AaojKXNZI8vHY6hho8rkdF4u+JnhjTZJrawtZL64Vt22OL+H+9urzbxp8SptXuks9ShmuIZEZoLGxXcqt/dZqd9ovI8/29fx2X96GH5mb/ZrMvfHGg+HY/N0eFUm+YJNs+at6cT5rFZjXqe7E0re71W+hW5fw9Z6fab/+Pf7jSL/FurE1q88N2a74Y7fdJ8ySN83l7a4vxZ8ZLydZYU3B1Vv338O6vMfEHxQ1nULje9zu/h+/92tOZHmxi/tSO28ceOLa8upIba537fllZv8A2X+7XmuvaonL72VV+4u2sm98WXNxNsmOVb+L+L/easi+1a5jmb59zN/C1OS5jWPvfEUPECbpGmhfhvmaNVrkNc08M2/zthVvu11VzqRZX85/9la5/UJppH2STKp+6rNS+IuMjgdfa5t2b59tZsuyZTMiMB/FXVa5pcNxGyfL8rN97+9XMeS9rI9q6fLv+9soiacxVjupo5vkfdt/u1safq0b/uZuVb761z90r2VxseHZ89WLe6SObfv20+VE/Ebc19daPfRajbTzBo2Vt0b7WX5q/Ur9lfxR8Pf+Cqn7Hd9+zf8AFHUoW8b+Ebfd4cumf97Mu35fvfNX5VLfJdW/7ybmvQ/2Rf2kvFv7LXxw0r4keD9YmhaG4VbpY/8AltHu+aOqjOVOV0Zypxloh/xm+APj/wCBfjvUfA3irR7hJrGdlaTZ8rf7S1ylrNtkP2lGRl+Wv2P/AGkvg/8ADf8Abm+BumftB/D23t/tN1oyz3/kr92T+JW/2lr8wviX+z/rHhXV5Ib+w2Osu1GjX5f+BVxY7CxlHnhHQ0w+O9lL2VTc81kbzMTfcOz+F6csiSKHn4+X71ad54N1LT5pUmhZhv8Au1XXSX3bJoZNjfd+SvD9nKOx7Ea0ZRvGRf0W1TcjmbP+7Xrfwn8Ra94baJ0+dfN3bd/8NeefDT4c+I/Hvi+18M+GLEz3FwSyR+aqDCqWYksQBgA19sfAL9mTXPh94c07xv8AEn4WXKabc3rQ2utSRM9rLPGQZI0cfI7qjKSoJI3DI5rqfDXEmb4T2uXYCrWg5ct4U5SXNa/LeKettbb21OrBYqFGpd1VF+bS/M3/AID+NPFuuapbaVbabMBNb7omb5fvfL8telfDAPpPxis0u5gGgvplldsYyFcHNerfs1/ALxv+0L4uvx8EPA11rv8AZNuJr0QQrBHboc7VaSUqm9sHam7c21sA4OPIDN/wjvxWvG122msmttUuUuoLiBlkhbc6lGQjKsDwQRkGv0rwi4c4gwmX8T4DEYOpTrSwcoqnKElNynCpypRa5ryv7qtr0P0bJ8fh6mFqz9tGfLFttNWSVz6x0m/1LxIyWejwxzHZt3N83/Alr5P/AOCjPxU1Lw/qNh8HP7NutPm1CJb+XzomjeSFW27l/wB5q+mf2Rv2gf2Z/A3i+01r4v8AjmWCzjX97bpo9xMR/s/IhrH/AOC3XxO/ZN/bL0bwX8Qv2Z/FIvfFnhmdrK6sptFuLMT6e4zw8iKvyt2Jz6V+W8OeDfG8JOtXyzERt8MXRqL/ANtPj804lw8aqjTnGUX2aZ+cljeJG2x9qL/G3lfMy10uh/d27Nz/AN1W3K3+81QwfC/x6DiXR0wq4BNzGM/k1a2mfD/xfbsslxCRwBtWZPl/WvsKHh7x1DfK8R/4Kn/8iefWzHBT/wCXsfvRPa77VUd0+fczVq6bqCNIiXLrH8zMn8K10/wt/ZM/af8Ai3FLqvwy+DfiPxFDbORNd6RpElxGhPYsgIB9s5rJ8UfDD4l+Cdem8N+N/Ct5peoW8o+02Oq2pgliPoyPhh+VdFDhHimtiJYaGCqupHeKpycl6q118zzKuKw6V1NfeXtNvLaRdn2be67f4/vVvabqVz9neHzo2b7qf7NcVpmm+I7OV2ewQqwwVMoOa0LdNfRmPTccBfMHAr1o8B8aR/5l1f8A8FT/AMjjWMoKWsl953+l+IJo40muXj2fdbzF/wDHq6XTdYeO3TY7IsifJN/tVX8Ofsh/tc614ei8VaP+zT41uNOuoTPDdQeGrh0nhIyHXCfMCOQR1HSuT0/xJNp90Y9UjmjeJjG8EynKEcHI7H2rmwfC3EuOlKNDCVJuO6jCUretk7bdS/rVKMdZI9d0TxB9qT53j279v+9WvY6hM0e+bbt+6nly/erjfhJ4Z+I/xbvZbH4Z/DvX/EM1oGLLo+jz3YiRv7/lodv44rofHng/4nfBeC1v/it8LPE/hu1lfEVxqvh+4hikb+6GdACfbOa0fDXEFPFrCvC1FV/k5Jc3/gNr/gRKtSkubmVjq7PVIHVUtnba33m37q3tJ1a2hZPnmD7l+VU3L/vV5D4W+JehaxqbWmnXjj9wWZdjK2B15Ix3rqtL8QXgHlvcqyt9xll2s1cmNy/MMqxXsMbRlSna/LOLi7PZ2aTsZ+0jKHMnc9b0nXEaFZELb/uu3+zWwutLJbhHuVBk+Xb/ABbv9mvMNN8S3knV1ZPvPHDW3H4ihZmfzFLK+23X+Jm/2v7tZRkYVI8x12p3ztIHhRn2/K+56+cf269h1Hw0YidnkXW3P1ir25fEFtNs3ncGZv8A9mvCf225mfUPDsbFDthuiChz1MVfo/hXOMuOcKvKp/6bkfScGQtxHRf+L/0iR7X8Eiv/AAqDw0zbVP8AYtuqqf8AcHzVta00ccKujr8q/Kyt/DXJfBzWBb/Cfw/ayFcNpFsu70+QVs6priyRy2yPGgb5EmX+Kvjc7nbOsT/18n/6UzwcfT/4UK0v70vzZT1a8gaI/wCsLKm1PLX7v+9WPeXlzG2zf5X7rb5n96nzal9oXM25fl+eRW3M3+zWPqGoeZZhH2q6tt3LXhykZRj9opa1evNseFG2L9/y221zeoaghDw/K2373yfeq7rl5Naq+zcu51+VU/hrjNa1L95LZpuRG+40b7WrnlI6OVnQ2upfMsPU/wADK/y10/hy686PY94uGT7u/wCZq8xt9Uhjx5LxsZF/heui8P6w9mqpDdLhk+7t+ZWrn5uYJHqWk6htjMds7P5cu3bUlxcOYYkhufNRm+f5Put/tVyFr4kmWMrvWP8Ai8xadceNINy5mZN3y/KlVKXQn3DYuta3XG9Ewyu2xm/h/wBmsq68QQrcF5n4b7i/7X96sK41pod8KTbHmfcm5vvL/erBvte2/uft/wC7VfvM+5mrKpUHGPvHZT+Irb78L+Xt2/x1fs9Ze6aVPOXe3ypt/hryW88WbZP3Lrvb5dqr8v8AvVd8K+NppPkdN9wvy7mrGUuYfL757tpN9Ctp++mjdF+XbI3zNVxtW+0Ls8tk3JuRf4a4Gx8UJ5KXM3O77vzfe/2ak1LxRND5bs6qmzdt31nKRfL75+U+hq62ux4WKbNvzPW5ZyILVLb93sb+HfVCz08xM/75iPvbdv3auWcczNvhEinc29W/9CrwZYj3/dPu6dGESbdMrK838Xyr/u1BdSW21Uh8vP3mWrtvbvJH+++Z/vblqG4sU8l3jeNmbcrttqfbc0uY19jymTJawrGrxupZf/Zqht7M7nkdvvfw/e21oNZzIo5VW+8yqtNa3m2s8KZPy/M38X96nzc0feJjGX8pnbrYMqPuc/dT5vutUkfkxzRo/wAzL8u7f96l1K1aw/d7Mbf4aybi72wvs3Nuba1ddOMJ8tjjqSlGVpRN2z1KZv8ARk3IPmZf7taH2wMvlum4R/3f4a5mx1DzIx+++WOr9jq03mebD8m5NvzfxV0R+02YytLlsabSJJH52/btb522/wDstRRzJHCd8zL83y1Q/tB4Zt/nKGaL96zVWvNSF0u9PmCp8u6nGJjKp7wanqkJ3fPsb+9XN65qXmNvtn4+7uq1qV08bb0df3ifOu6sDVt/mO8LqC33Pn+7W8Y3OOpU98+pPhtMJP2TDM46+Hr8nH1mr4pvNQeRmdP+Bsv8VfaPwzJk/ZBJHU+G9Q/P99XxV9jfyykaZ+fb9/8Air9n8U3bJsh/7Bo/+kwPoOIkpYXBN/8APtfkit5n2jekPyVbs45lVP7n8dLY6f5cjK/zO391PvVah0yaObePmX71fjT+L4jwqcfeJbWGGWTZsZtrfK38Na9nDOP+WyquyqMNu9u2x0zufcu1P4a0FjdRsRN/z/w/w1zVOSJ6uHpmzpLQ/fTdt+78yVu6bP5bF4ZmUMvzq38VYOmyeaodE3Bn2qv92t3TYXkj/h/76+9Xl1tj2MPTqy5bHRaS0yrFDbJnd/e/hXdW7bxpHMvnOz7fmTclYOls8ewbNh2fKrVprdIzQpMm9N38TbfLrzKn8x6fN9mRLfLN9lZNiqJn+833mqCaF4UKIONu5d396nteRNuT95Ii/L8v8LVB8/nCNPubfvK3zVnL3o/EKPuj2urmRYXR1Xy02/8AfX+1ViGNIdvnf6xtv3kqCOEtcbx0/ut/eq9DG80zXMyLv+6i/wASr/FtrLm5TeMeaRHDDCyskMLL+9+dV+9T4983yP5imrMa/wACIu6FdvzPtZqfDYvHGEeFl3ff/vbqcZc0jaMeWXMRWdqJGXZCqhVZtzN8zVo2cc8kiwoissi/d3/xUsdi6yD5l+X5kbZ81XLS1/fAnaVX5tzfxN/dqvcO6j7xZhb7PDEnnMm5/n2/xVp6fcJBGmx9219r7vmZqotGYdr3KZ/etv8As6bvlqxbyPCqOibd33f722pjE0l8HKzRhvLZvnuX4ZPmZabN9mSHYtz87N8rN92oLWN5GV0T5Fb5P7q1dtbW2uvn2KxZ/wCLd8taxjDm945alP7JXjt3kjFtD8/zbfm+VVpYbONbiGaa5ZHk3fNt+Vvlq5Ja/uWtvLjc7N+7+7/s1at7OG4mZIbbb5cXyfxLtolK0eU5qlPuUfLea3XyYVSXfudZPvbalW1m8tH3/N91FVf/AB6tBbRJmZPOzt27P9lf7tLdw+ZNvs0YP91/4qPdjojkqRMZtJRoUd33srbn/wBms7UtP8uZt8O8r/t11E1q8jI43IPN/wBWqfLVHUrdPLf7L8kv3mb+H/dq/djpE4pf3jkrjR/Oj3o/l+Z8u3+Kq91p/kyhIUyqp97+9W9dwpHCNQuvmMfzbV/hqBrdLiX5+sf+qjZ9rN8tPm9/U5qkZcpzd1prsyPGka/N8y7vm/3qrSaWv2NIXdi7S/d8rc3/AH1XSR26XkYmlh2qq/6lfl/4DTZoZGby0ttzR/L8rfw10c3uxSOXl5pXic3HbzQ/PCnLfK21Plb/AHqt29rMsS7y33Pk/vVsfYXj2OifvW+5/d2/7VO0+1mto0e12sGZlZv4VWolyy1FR5o+6QaXYpDDJvdoljTbW9pcKKqQp+88xPn2tTdPh3JsdPmb/a+ZW/vVqaevl25hmT/a8xf4q5pS5Zcx6VGn7xNprOV85E27n+833WWuj0S1SSRU3xq0i/Lu2/LtqhbKkdvDC8O5FTdAuytLT1vG/ewwxp91d0abWWsYy5p8yPTjHlh7xq24mnb/AF0gKvteTZ92uj0mFLWQIgzt+bzP4t3+0tZGnybo4U+6Wfc3+1/tVu6fcQrMru6nd8q7fl3V6VA4a1O0DpNNhmWJrlId25f/AB6tbT2hFu0LzK5Z13R/3qy9KuI1hMPkyIsjbUb7y7lrU09vLmRZvnbdu+58q17WHieXVlyx+E6HQltrq4/ffu4mTci7f7tb2lW9rCq+SjFF+98/zbaxNDt0jbYiNtbd5TNXR6THNGoT5X3J8m1vmr1I+6eZWjyyOj0K/kZXRJtkTKzJtT5l/u10cMrwr5s21UZ1ZGVdzM38W6vN/GnxS+FHwZ0ubW/iv8RNF8NQRrvim1jVI4Gb/dj+81eV6X/wV2/Y68SfESx+EXwf1jxT8QfEOqXCwWGm+E9DZ47iRv7rSbaUqnLDmMXWoRjrI+ifFFxN4ovLlLDUpporO6+zeW1rsSPavzLu/irzj4ta9Do+mwW3nLHLs+WGN/vf7TL/AA16N8PdJ8Q2PwzvbzW9HurXVdS164e80e8b57GRtqrCzf3q+V/2n9c8Q+F/Fl9qv2BkRYPKlVm+ZZP9mvzzMq31uvPkFR92XqUfFHxK0S1vjeXV5MWb5Yo9nzbq4rV/jgl9pc2lb12Ryr5rfL83/Aq8S8V/ErXvE2rD7ZD5QWVkVfvVreCNNe81S3037MzyXG2KCGOLc00n8Kqv96vLo0eX+LK1j28HSlW+E9b0O4TVtLuZtYmVbaZF8qSR2bav+7XlXj6+8PWf2m20HWFnjjbb8rN+7k/iVq/RLQvEX/BK39iHwLpfhP8Aa9vYvFvxBvLCO6n0S2iZrfT2ZdywuIm2q397dXz98Xv2n/2cPi28+k+B/gX4L/sC6l22tvpFh5U8a/3mk+81YYqthcLCNRPmb6I+kynI8djHJVockOkpdfQ+DPiHqE0in7NMvy/M7Mn8Neaa9qH2e43wnKt99levqT4zfs122oeF9R8f/BZLzUbKzRrrV7Fl3S2cf+z/ABMtfJmuXCtcM6J8snysrJt217GV1qWLjzo+Wz7L6uXV+Uc2oQzRGTfuVl+7TDaJ5auj42t8q1Bbyfak8yFFbav3t33qdb3l/IzWboqRbtyyV6dSPu+6fO/FrIms43hLF93zfdq3b69cK3kzbVj+7VCZXLH99vVvl21JDNazb4Xhb93/AMtI/wCKuaUfslxlKPulu+Wa6t0e2+T+/tqte6XDdTvDDcyRr5W7bH/erofDdmLqJEez3p1T/dqxqHhKFlTyf3f3m3Vl7SMJcpp7GrL4TibGzmiwZpm3762H1XypERHb723/AIDUWqaOIV8yCbdu/h+7Vnw7b2cciXM0KynY29WqKkY1I8500ac6fum34RuYlX7Q8s3yvtVt1fZX7H6+J45orvw94P1KdZFVHaSDaqt935Wavmv4dX+pLJCmleBmuhD83l/Z9yt/vM1fcH7K/wAUviRpGoW39saVss/K2yq21fLk/hXbXyOZ1HKL5Yn2mSynbl5j6Ct/jN8fvBOoQf8ACQ/Bmxn0+4iWBdQaeFp1hX7zNHX0B8F/FHw68dWUmsP4e/s3VVWHb5f7v5t33q0fgN8Mfh/+0d4GfTfEunafq10sH+re42yw/L/Dt+7trzX4ofDm2/Zb8WQXmm3/AIo8PWMl1HEsmsJ/aFjJu+7833o1WuOnhZVKfPDY6qmKiq8qM9z6bh1mx0uyntteij8xvm8xdzVDo2uaKshSzmhRNu5mZvvVk+D9S8U+OvB8esaL4u8H+IbZXVWls7hkdfl+bcG+81TxaRYrI/2rw1a7JNvzRp/DRWoxjOMJI9HBuFSlKPU+cP8Agql4Jk+OPwA1qz8OaysI0OzW9WSKLclxJG27bX5RWNvNcQpsdlkaLf5cif3v7tfuZ+1/8NZvGf7OHizw74X0mSGQ+Grho0tdq+ZJt+Va/FbS9F228NtMn76HdF8y7WXb95a+q4f0pzj0PEzWpSlKHIjAk092jbejJu+by2Sq8On/AOkI8IkV9jfLXWalpfnw/uY22L80rb9rVmLp7xyDfNhoX/1m3d/49XvQ933meZKMTMtdFSRUh6P1WT+8v92tWx0l9xtgitu2r8qbttWrOG5k3iHco+7u/vVtaXYo0xSGwwy/c3fe/wB6vUp8/JqedKXNMP7DSOZI4fMYx7W+Zf8Avpa14fN8xbaFNyMm5l/u0+xsbn5oYYWd5k2r5jf+PVLb2KMyTeQ25V2bm+6tehRjE56kv5SG1Xyo3REZG3svltVhVuZlIebZ/wBM1Tdupz2vll3Tbs/3/mprRzQozv5jOu7738O6uuMYnLU5+UqyjbGQ7q3z/wDAdv8AerQtVij0gLGRsERxg9uaxL5UbytkfyMq/Kv96te0YnQctnIhYH8M1+z+DC/4Wcf/ANgtT/0qB73DP+81V/cf5oox3010yuAr/vfnXftWr7zxyWfnfdVm+TclYcM8yzBEtlKbN8rfxLVqW4to7GPzptm3dsXdX43y+5ynzXLEbfXz3UiIjx+WybvmqCTU3uplhmdpG27UjX7u6sqbUJlkM33f+esatuq7pc0zP89tuf8Aux/e/wB6ueUJnq4Wmd14TXy496BZtu35dm5lr1XwXpUPmedNucMjbFZfmVq8q8Ntua2R0+VW3/N/s16TZ+Jk0W1+2XLybmXcqxy0U3GmejKolC0j1C1utK0mxjtpkjik270jk+XdXPeIvjBCt0dK/tCO2t/mZG3fe/3a8a+KX7QFh4b0G41XVfENvbCO3ZYvtT7mb/gNfMPij9sa2ub+7+wXLXcmzylupvlX/a2rXTCPN77Pks0zmXNyYf7z6R+MXxd/tqS68GfD1GvLuOLdK2z/ANCavFdW8ZeKtPjmzYMpVN0sjPu+bdXkl1+1Br2m2d1YeFXa2mvtv2q6VP3jViap8dL+3sxNqV5nd9/b/FXVGPLE+Ylz1HzTPUNQ8eeJFZ0eGbbJ+9dpP8/drC174iefbjfcsJWVn2r/AHq8l1v9oK61i4Pkv5SL8vy/xU3TfiVbatcb9SRdn8at/FS5pyHGnI6O+8eJcSPbTTb9rbvL/u7qxbzVIZpH3zbPn/heqWqSaVeRrNZ3kafNu8tq5m8vHhfyU3My/wAX96rHH3ZG7ea0nmGV/vf3lqhcaw8iv87b9m3czfw1k/aJliZ5gpo8x1YPnf8ALu8tarlHzIsXGoIq702/7u/71RsyfK6HH91aPLh8zZs3N95GpJGT7WyMmfl+8v8AFTjyi5ub3WZl5bvIqp94turndctZll+VNp3fIy11zL5ZLu+1v4dtZ+paa8zIh+9J/t/doi+YRzGrabbapH50LqxjTc6r/erDuLe5jZUmhZWrc1TQbzTZmvLNPutuZf71XdHt9K8Tx+S/yXP93/apgcvHJNGwTa3+9UU008cyuj7Sv+1XZXnw98lWm3sm3+KsS98Nur70+b/ao5Zhzc0j7w/4Iy/trXPgPxHJ8BPG2syHStcl8uykuJd0ccjfw7W/vV9J/tPfBXQfE2qXCf2bGGaX7yrt/wC+a/I7wfJqvhXXbXXtN3b7W4WVNr/NuWv0j/Z9/aY/4XB4FsX1vc95awKl0vm7pN3+1upe05IcsjlxlOM+WX2jyLxP8BbnwrdXFtHbM9vJ/FJ8zf8A2NaPgD9lez+IUkVnDYXEcsjbH3Rf8tP9mvr34V+H/B/jLWLew162txFJLuZW+b5a/TL9j79jv9iC60Gz1iezivtUZN/79fLVW/2a5vqcefm5vdMKeIr83LE/Jf4Xf8EsPi34D1XTfil4e8N3WomeZbGytLOEtJLLMwgRFUdSWcCv1c+LP7FH7TPiv/glb4F/Zm0XwbHL4z0bWUuNU0ptZtlVIVlvGA80yeW2BLFwGP6V2/8AwVM8C+DPhz/wT88Tz/D7To7AwalpTwT2rkOrC/gIYMOQR61478aP2hfjrov/AAR2+HXxa0n4u+IrbxRqPiFYL/xDDq0q3lxH51+u15g25hiNByf4B6V+xcN0c8XDeULLZ0kv7R09pGT/AHvsVyt8sleFubmStK9mna51QbvP22r5ena/5nz1+wj8Uf2+/wBnv4ieLvhB+zj8L31jU4YJpfE3hXWdNZ0spbcFTMR5kRjlHKBQ37wlVCudgr5v1STxv8S/iVdzXenXepeI9e1qV5rW2syZ7m9mlJZFiQZ3tIxARR1OAK+1/wDgg5d3V9+1B4zvb25kmmm8EyPLLK5ZnY3tsSxJ5JJ5zXi3/BOOaztv+Ci3g271GaKOCHXdQlllnYBIwtpctvJPAAxnPbGa/dauc0sq4lz2vHCU/bYahRqynFOMqsvZ1JWk7vRciUdLpbuVlb7TgyDnlmOV3Z0pL00ZN/w6k/bz/wCEN/4Tb/hRNx5H2P7T9h/tS1+27MZx9n8zzN+P+WeN+eNueK+f9a0XWfDer3Xh/wARaTc2F/ZTvBeWV7A0U0EqkhkdGAZWBBBBAIIr9gLLTtXg+NEfxdvP+CvWgz266gJpPCudPXS2t882whF7gLs+UPzJ/FuLfNXxf/wWa8TfA/xp+1NaeKPg74s0vWLq48OwJ4lutHvFnhNyjMseXQbS/k+WDhm4VQQpHPn8AeJmfcQ8Rxy3HU4VIzg5qdKlXpqnKNvcn7aK5k09JxtrpbU+FxGFp06XNF/e1r9x8jV6J+yZ8GrH9oP9pDwf8HdVuLmKy1zWY4tQlswPNW3UGSUqTwDsRsMc464OMHzuvpj/AIJDaxpGj/t7eDjq8ir9pgv7e2LQq2Zms5doyfuHryOe3Qmv1DjDH4rK+E8fjMN/Ep0aso26SjBtP5PU5aMVOtGL2bR9B/t+f8FMPij+zH8X1/Zg/ZTtdH8PaH4J061sp5TpiXDNJ5KsIUEmVSKNGjX7u4srZbGBU3xS8a6N/wAFMf8AgmdrPxw8d6DBZ+P/AIXXM7vdaXDhJAqxvJhWJIilgYFlzxJDuHA2n5I/4KM6dqOl/txfEy31QsZH8TyzIWjC/u5FV4+B/sMvPfqeTX0x/wAEtZ4fDP7BX7Qvi7xJLt0ltMnhXfapIvmLp827hjhyfNiG08dPU1+HZjwtkXDPAWU59ltJRxlOeFn7WP8AEqurKCqKUt5KanLR300XY7oValXETpyfuu+na2x+ftfTf/BKLUf2b/DH7TD/ABA/aP8AGGk6VbeHtFnvdAXWkHkSXqkYfcwK+Yib2jXG5n27PnCg/MlFfvfEOTriDJMRlsqsqSrRcXKFuZJ72umtVo/Jvbc8+nP2dRStex9n+Pf+C2P7WNx8X77XfAF/okHhaLVW/szQZdGSRZrVXwgklYCbc6gFiGXBY4C8Adb/AMFvvh94SkHw2+P8PhtNC8S+LNLki1/SnWNZmMcULoZcEF5I/MMRfaeAgJG1Qee/4J4/sVeFPBvhtP29f2xbiHQ/Anh5Fv8Aw7p+pKQ+pzKQYrlk+80W/b5UYBadyuAUwJPEv23v2rPEn7bn7RE3jK2Se30aN107wjpV4yRm1td3ymTDFRJI5LuxYgZC7iqLj8bybI+H/wDiIuG/1Yw8aVDL4VIYmtBWjUlKKjGi2tKk4P35yd+V7tS0O2dSp9WftXdytZdvM+9viB41+P8A+z//AME9PhRe/wDBPnwTHqtpcaVbya3eaZpR1G4h3wCWSUQ7PmLzmXzHKfKQBhc8aH7A3xa/bD/aL8K+OdC/bs+Hvk+CJNBZBqOu+HhpjTBwyzRbNqCSLyg7M+35CBzzxhfFL9oTwr/wRz/Z38Ifs9+CtMuvF/i3VLaW/mXWNVf7LZsx/ezBVHyxGbcscMe3IV2Z92Wdn7LP7f8A4e/4KW6R4i/ZA+O/haXwtqfiHQ5xa6l4U1WWFbyMDMkaBtzRuqfNtYyRyKrhlx8rfjmJynM8Vwni8wo5ZCphJV51Fj2l9a9l7W7qqHMpvls9bpW15bXZ2qcY1lFys7fD0vbY/MrTrrR9F8Y3zaRcNLYRzSpaSMxJki3/ACEkqpOVA/hH0HSuw03xhbM0Sb9wb5n21x3x68D3/wAAfip4i+GGuXcc1x4f12fTXuIiGWQxuyh+CcZABx1GcHkGuWs/Gezb9nmk3L8zqv8A7LXoeM2Ko1uLoVaMuaMqNNp9002n81qZ4JNUrPuz36w8UW0MiTJfsD8qqrf3WrorHXkkjk2Oqv8Aw/w14To/jRJBsjuYyv3fvfMrV1Gk+KN1mN7szM/3Wf7tfkntPsnXyzPYbXxJCzJbXM3O7d/eryX9qHUBqFzozK+Qi3Ax6cpWxpOveTIl59pX7/z/AD7t1cj8d9Sm1ObS5pX3YSbBAAHVemK/SPCad+PcKvKp/wCm5n0vB0X/AKwUm/73/pLPYvhrrX2X4baNDblo5RpUI34z/CK2brWofJWFN3yr8zbvu1514A14w+DtOtt64FlGo/2W21oSa9DHj52ZvvL8u75q+Lz6rfO8Uv8Ap5P/ANKZ5GMp2xlX/FL82bd5qz28jzJDlJH+Zay7zWk8xkfdIn3X2/w1nTau/mFEvFDMzNKzf8s6y7zUbyNPtI2lm+bbI33lrxZVDn9mP168Mil5H37G+dVrlNWuLBlNyke5t33lq3rmrbYy6zKnz7W2r8rN/dWub1LU3+wB3dmWOXZ83y7Vb/0Ks5VC/ZsS4vHjme5hdT5b7tv8O7/Zra03XEtG37NjMy7Y9+7/AL6rh5L65N1FbQyYWRWZPM+VGVat2+v7HTznjR2+XzKzjKP2hcsz0+HxAlxalPti/d3P8m5WqHVNaj+R/tMaFdvm/wCzXF2+tQSQokM21lT5WWqV/wCJHWNXlfczfL83zNVRkZ8h02peLIYrzelzteN1Xds+by/7qtWRrWuJKyTWz7U+66yNXKah4ofzG/1mf7sf8TVg3niLzGZ5pmUMv3Vespe8VHlN688SJ5kzo3K/LuV6k0XxpNHIlykyqrbl2/3ttcBqGsJ80MNzhGbc6/d3VDpetJJdCaR2T+5urjlU5TqjThyXR9AeF/iHbP8A6m/2t975n+Wr83iaZl2fafN/hRZHrxzwnrWI0R3Un5tzb662z1BGtfkm85f4/L+Xd/u1lzSXLyj+r8seZnylHp/l/vkhZXkf5GkTbTzpryN5yf6xvl+Z/vVu3GmySSSfIr/8C+7Tls9zbNm4/wAXyfdr5n23Kffex5jOh0nyYZER/up937rbv96q8lqk6s7w7PO+9XQx2M1x8kjt83zf7TVn6lp8bODv2n7r7aqnU933jb6vzJWOZmXy2Ih8xFkb52/vNUflzbZZ3eTb/B5j/drV1S1VkH+9uZWb+KsfVriHzOXYP8uxV+Zfm/irrp1uaASwvLH3Sjqzedbkh12r821fvVgXV5tuGfew3JuStPWJHt7UmbdlfvMrferDvJkbHkupXZ89ejhbbHmYqjOQ6Obyo1RvmO/d9+rdnqU0aiH7qx/Mism6uekmfzPOT5G/753VNHceSy7UZf4mZn3V3yieVKPIbkl552f32N1VJdQQL+5fd/D96qclwk0sf77Ztb/dZaZcbFjWOZF+/u3bvvNUSlymFSnPl94Jm+0SNDM+Gk+X/drLvm3fc/h+7uqzdXTxt++Rn3f7FVpI/tHzwwq6t833qqUupyyp+8fVHwsjP/DIoiwcnw7qAweuczV8i2uk3LMYvJVW/jVq+wvhTEP+GWI4SMg6HfDB/wB6avma30MSMr741b+FVav2LxXny5LkGv8AzCx/9JgfUZ9GMsPg7/8APtfkjHstL8uFUdNjM/yVeXw7MW/cv95K6LTdBTy0huU2/wCz/FtrYi8OvGw2bdjfL92vxCWI5TzcPR+GRw66DcrComg3fNuWT+JaktdL3bUQNjdufb95q7O60H7Gphuk3/L8jR1XXRYX+dH+Vk3LurD2nNuerTjHnOcsbOWJTzj+FGX5q3dGt5vMR9/y/L91tu6pl0W2W3WFHY/MrJHt21o2tnbW0KI6MV/j3fw1yVKnNHmPUo7sWBo5FSbzJPKX7jfxVOuoO0mx3xu2t8yVB5cNvM485vKZ/k3feVdtH75Y2R33/Lt/4FXDy/zFSqRWxaa4m+0OjpwyfPtf7zU+OOZgqJ95fmdmb5az/MeGQb5v4Puqn3qspHDdR+dM6ouxd+5/vVlKP2gjU5vdL0MQW4D/AGyOFf4P96tDYjQpsmVXZ9su371ULWES2/necu3d8u3+Grq7Pm2T71X+KplUOqmW4YbZbf7/AJjb937yrNrG0i8Rskit95n3Kq1VjmS4k2TDcy/Kjf3quRqkaeWkytJ/00/2aUZG8eaUvdLljdJcR7441Hltu/efearpZJZPJfazMm/aqfdrNg33S/adysq/Ky1cb5Y/OWFhHt3bf4mrSMfe5jrpy5feLcLTrDL5jrDuXc391qnjuPlE3zMfuOv92qtqXuof3Yj/AHi/8B21ah0/fGPk2s25VZf4q1px933jeXve8ixb71txNM8m7c33f7tXrSP/AEHzHud2377fd3VHptq7W6P8u77rQ/3Wq3Z+bCp86ZdjPuePbW9OjGXunNKpyyEjjMli1y/y7k3bVfc27dWjpq/uVe2m8v5/n8v7v+1UUa2d0G37gF+X5m+9TvtCWrCFHXCy/wBz71KtRl0iYSr05RvKRcjhh+zlPmf5P4fvLUbTJ9ojuURt7fN8rfLu/wBqljuIW/cpy6/wt8tV7qd4JGheT5JPuNv+7XP7CcZKRyyqwlHSRKzQ7vnfeWX5lb5VqndW7yRvM67Y9u6tOOF2h37N+3+L71VZtjWbh9u1V2usj/w1XJOJ5tarCMveMe6VJFUNtV9nzrH91lrOmt/OjR0to98br8395a2prPbtffG25tu2NKZJYw3Ehkhmj37lRo1+8tFpxOfnhIx4YfO8tII5E3fwyPt+b/4mpYbPaz/dDbPvf3mrQuLUR3P2aNPlZNyzSJVyxt3+/c+Sieb88e373+7XQ5Tl9kx9yM+U57+z7mGFLq2uFZ2b513/AHW/2qktdJ89fs03ybl2/u/u/wDAWro4dJR43S2HO9m+b+7VqPR7aSJvs24oqfd/u1lKc+U1p0lze8ZWm2aRw7BCxdvldmX5lrXhtXKjMLbtm2KT5fl/4DVm1tfJjRE+Z2+Vdy/eqxHofl/M6K7xuyvt+bbXNyTqHo03Rp9SKG1f7OIbmZiqy/d31prbXV1tTe0YX5UZl+ZWp9nY7oVSZI1bZuRW+81WJI3s7dEe5jO5t+1Wp08PWlV5eU3li8NTh71SJNHbpDGib1R/K/1i/e/3a1dL+aMQv5iN97d/FWcti90qiZ1QN9yRv71a9tNZ2Vu9zc6rC32e33s3m/e/2a9zD4WvH7J5WIzjLI6Odzf0WJ47pYXuWfcq/u/4m/2q6TR5YdNUWFzNyqfJHI25q4aHUNYVU1W81qPSNPkXck0y/vZP91f4a1rjxNZ6PZy3mm2bRytFte8ZN8s1exDD1Op8rjOIaesaMTrb74meGPBenya9qrzeVH8sqyJtVf8AgTfdr4I/bI/4Lc/EfTJ9T+Fv7L01lptus/lz+JEhWWbb/EsLMvy/71eff8FK/wBtvXrm/f4G/D7UmjVV3a5qEbfNI3/PFf8Adr4cY7ucV0xo31PGljMTU96Uje8dfEfx58UvEcnif4i+MNS1zUZmzLealdNK5/76r9mP+DUX9lHSv+Eo8V/tmeM9Ijf/AIR+L+yfCrSQf8vUy/vZlb/ZXatfjh8Kvhn4w+KXjC08F+CNAutS1K8lVLa2tY/m3N91q/rM/Yd/ZV039jv9i/wP+z9olnHbX2n6JHea3df8/GoTR+ZNu/3W+X/gNfPcT476ng+SHxSPQybCvF4v3tkaHxM0XwxY61f3Oqw7Zr6Xz2jVvmZv7zf7VfF/7WnwNvNea+1XTnZreG93L523dNHJ/E26vpD42ePNY0uaabxPo8MDt/r449zRzL9371fP/jL49eD9BvlufFWpQtDJFvuI5vmZY4/u7a/NKOInTjzH0n1eFSryny3N+yjo+k3g16awk3szS3SyO2xd33W/+xrsvgh4P8L/AAX8J+J/2k/FVms03gu1kbQY7i3XY19IrLB8rf3fvVi/Fz9qiz1jxBc2GlPG9pHFuikjfcyru+WvHv2l/jZrGqfsi6P4TfUZmm1zxfNcXSt/CsMe1Vbb/vfdonPE4lx5/tH2/D+XYenXjJ68p8+X/iLxt+0T8TtQ8R63fyXl3fXUk+pXTLub/d3Vk6tL4i+HMzTaVdTRiNtqyRuysrf3a9f+APhP/hBfhqHa2hl1XXHZ/MjPzLGv8NY/x88e+DPD+lDRIdEs59QmbdKq/M0K/wB5q7faU/bRowjzRPWzXH1YQdRsufs//th6xDqcel6rO1tPDEyvIq/LdRt96Nq4T9orwz4e/wCEmj17w/bRrBev8iwy7lj3fM1ebJ4iln19b22tI4EVv+WdavibxBc6hpscPnZhX5tv92uqODqYXFxnR92L3ifnuZZj9dptVNSdvCaaPDseFWaRN3zfwrVG509PtDWaf3NyL/FRputf2ppZf7eyPap8iyPu8z/ZrS0W8S4tVvHTefutu+8rV6salX7Z81KhHmjymZb+Hb+ZhNbJ8m3+Kr0Xh+8t7hneHKNt37fu112i6lYLZ/6MitLs3N8lbOnww3EcU14io7Ju8uP+GuOeI/eSO7D4PmnEyvCelTWcY86H5JPufJ/DWvdafbQ2LQ7I1Ez7l3L8y/3quqyR3Cw2z8/dfbUt0sN1pvzvt2y/P5b/AMVeTVlPn5lI9/2MKMOZHD3nh/7RdtDDCzQ79u6tTRvB+m6RajUnRWK/djb5mqz5yWszwzJGPM/1XzfeqrqEl5Gqo/yhm2pt/irqlipU4cq6nlVIx57mnb+IPFU0zvDr0lhZrKreTCu1ZG/hrpvDfxu8W+E7Wa2TxLdXDyNu3SS/dZf7tc5oNuJLMQ6lD+4VN7fL92tQfGb9nb4cWKW3juOOV1vVaKFYvMkkj/irz4U/b1eSMOb0Lp1amH9/n5TqtD/bd+LvgGSHxD4S+LVxpWob922xumRmZW+VpP4a++v2Wf8AgtrqnjzwXP8AB79qDw/pfjG3urP59QO2Kc/8B+7X5IfFz4q/sz/EfZP8N3urSWOVv3bW+z5W/wDia4mO48W6Nfx6r4b8QSBoX3RFf4v7tet/ZbhCy9yX94y/tOtKd6nvo/o5+CH7SX7H1rd3Fh4Xs73SLy8dWsbdk/cbdv3dy/LXX6X8WFtfGVppuzzbPUN3lXC/dX5vu1+D37In7S3x1uvE9tpWo69G0Sy738xd3lx/xbVr9Wf2RPiVZ/Eq1h1LxDqqqNNi/wBFbe26SRv9mvBxmAlRxC5pe8foGS4uhXw8n37nvf8AwUq/am8H/sr/ALNU15qWoxnUvFP/ABLtGjkb5JJG/ib/AHa/IO+kvZNSN3JtR5JdzeTuVa92/wCCt/xu8PftOftReH/g7oV3Nc+FPhfpyyX95D/qptUk+Zo1b+Lb92vAWunaRpvut8zJtbdur6vK8L7OlfufLV6kfb27FjdDcMHR2dm/iVvmqjJCvnMkb7Ssu5o2pYZnjVHmdtzfN5f92pZGhuofuKH+638W3/davSjGEp8tzmlLrylu3s7aSNXmRo0b7ix/NW7pdrM15sRG2KnzNJ95V/vVj6bb+XG375flX5fm+9/vV1WlrDeSGEowdYvmZq7af905pk0cdzGB5McjJ915N/zL/dq19heGFkeH543+bzKm02xuY2Te8aKqN8q/8tKvQ2afZWREaUxv93f5lenT+A5nHmMaRYbePyXk3/P8rSVV1Df50r/dk/u7/wCGtKRd0jQvc7mWJldV2/erN1dtxZ5trR7VXdv+7XZGJhL3vdkZV0r+Yru8YRU+dV/har9sFbQ9u8MDCwyv41DfTIyuk275k3LuT7tT2mU0bMhDfu2JweD1NftHgtGP9r47/sGqf+lQPb4bdsVVj/cf5o51pHh2FEY/wtueqU15NIpPzFV/hb7v/AasapeQ2rb9/mIqbvLj+VmrmNUvoY18tEYrHL8rb/mWvyj2fN7x8z7bl2LMl5NJcP5M2xWf5Gar+k3CQt5dzc7mb5pWVq46G8feIZJssqf99VpWOsItwiQzfOzbUrnqU+bU6Y1vc+I9S8P65Bb2aRo7FW+VGri/ip8fLbwjp76am24mX5v3j7dv+1XMfEj4nWfhGzZEuWlm/wCXdYfu18z/ABK+Il/fXTzalcs0zf3nqI0eboeVmWbc0fY0v+3i38VvixqviS+k+06k0jTN95n/AIa4q3vnt7d7l5l/vbawZtS/tC8d55mJ37lVadqF8kdt5PnbP9ndXTGnCJ4NjRk8QP5jvI7bf49r1h6vrmpalcDZNuij+X5ag+0Qyw/OPvfdqGNkiV/n43VX90rmLf2v7PDvdNq/+hU1vEj2e5IX2Ls/3v8AgNZuqatDt++o2/L/ALtYtxfPMu/5mLUc0R8p2un+LppJPJd2Ybf4vvVvWt4mpQ+c7qPk+T5/mavLrW4fer/eH+996uo8J6xukCTPx91d38P+zURl2Mv8R1qQib/SVDNufbtanLb7Vb727/fqa2WRmR/4G/h/u1ZmtfJkEKI395WrQn4feKqxGOPfsZfM/ip11Hube6M3y/eq+LN9q7v9371Maz3SNuhbav8ADVRjGURfaKFtbvIu/YoLfxNViTSnC73RRtfdV/S7EM2/7y7tzLsrqYdDhmtV/wBAVv4vlrOJUpHns2lpJH5czqrfx1y+seG/s8g1DSv3My/3Xr0nxBoqWbPGm1XX+GvPNQ1Z217+x7l9ir83+9Ve8HNzbl7w3qmq31j9g1K2Xdv2vM38VLqWj+T8/wDAv8X96tK3js1jVEdv7u1f/QqmvI0mz/FVRAwrWFN3yJ/d/grsvhx8SL/4Z+IbbWLaeT7HNKsV7bq+3av96uXWzRmKb+aka3eS1NnM6n5P4v8A0Koj70zOpT5oH6R/BXx5pt3pdt4h0rUldGVWiZvvV9q/s1/tBTW7Wlt9v8k2qL8rPt3NX4//ALEfxmSO8f4darqX76P5IPOf93tr7d+H+tar4ZvormO5Yo207V+WtqlP3PcPFlKUavKz7d/bv/aW1K6/Zl1H4VX2qpNbeJbm1ls4ZZgZVkinjmkIHXYNoBPYsPWr/wCyt8Qv2bP2vf2AbX9iP41/GvTfBHiDw/qbT6VeX8ccKNCkxlSVGkKRSMRNLGy71kOC2CMk/I37RPjB/F9l4enaTIhiuFCnquTHx+lWbT4XeFNEsNA1nWvDj3tvqenW9xKPtbplnQE42kY5zX7zgo8P5J4UZficdVrU6k8RKtTnSjCUqdWHNBPlm0nHljqnu32OmlWlSlrrdW+R9M/8E4/En7Pn7GH7bHxC8OeK/wBpDw3qOgW3hee00zxTGzxW18yzQzMikgqZAsbDarsHYBY2kJFfNP7IHxZ+H/wf/bL8N/FL4hTGTw3Z65cjUpo7ZpQLeeKaEyGPG5lAl3FQCxUEAE8V2Xjb4FfBn4i6v4Z+CPwB8LX0XjrUna81SS21E3SW9ljhDG7HEhwSPWvlv9p3xncfsr6V4w8RXfhGLXLjwleT2n9k38skSzzLP9nAcxEOMOwYhSM7cV9TkOfcJcSf2vjYzxE3PDQjXco04NxpwnFypqDaU5JydnaKdraaH6FwbKawGPStpSk1v1TP0sP/AAT+/wCCYDeKz8dD+2hpn/CBlv7S/wCETGr23neX9/7Pv3+fsz8vleV5235d2/5q+Uv27Pip+zv8V/jrdar+zH8KdP8ADHhmxt1s4ZtPgNumqsnH2r7PhVgBGAFChmA3v8zED4y/4Jk/Fb4rfthfHeXw78Tb6yt9OnCGLS9NsfKhtw0m3Adi0rn33EV9Q/8ABe34Dav/AME2rT4Oa38G9WkisPGUl9b+IZriATg3KJG8SqZc7BhmyByfWvn+HPEfhrK8zWNx2NxuLlCLhTU404xjF2vzRhNKpN2V5zu+tr2a+HrU5uPLGKXocJXS/B34peIvgl8U9A+LfhKOB9R8PapFe2sV1HuikKNko467WGVOCCAeCDg180/swfG34gfE3xnf6P4s1iO5todLM8QS0jjw/mIucqAejGuM/aM8X6hpHx11KyivZo0W3tyCkpAXMKdq/Tc+8TspjwQs6o4WVajWm6LhNqDaalzXtzq3u2t1uYU6DVblk7dbn7o/GT4Z/wDBPX/gpjrFj8e9H/ai0/4feKZtLt4/Eul6nJBGzMqDAdLhot8iAiMyxsyMsa8cZrhf2t/2jf2YP2av2Pf+GF/2O/GVv4pl1m8kPjDxEB5w27kd281VEUkkhWONTHuVI4iCd21q/GDR/iPFIsem6lqbfaEVmtpFuDtZW/hraudZu1Qf6Y3ypudvOLV/NeXcd4TC18NSxEK9bB4WSnRoTrQ5Yyj8HNJUVKcYX9yLdlZbrR+39UjUg5wkrvd2/wCCfql+wT8Iv+CbHjv4D+LNc/ax+I66f4ptpJRBBd6y9k9lbCPMc1lGjYvJS2/KFZcFFHlgHL43/BM34FfslfFL40alr37Q/wAWtJtNL8NyrcaL4a8QSpZprQ3nbJM8jeWUTCloAxLlufkVg/5YalrlzJMkw1SZNq7t28/NWZN4yvd2Ib+Xhv3v7w19DjPFvFYqlmUacsRB4vl5f30WqCWjVJOl7qkrp2aezT5lzHLHBJOOzt5b+up/RN+2p8B/g1+2j4gsv+Ei/wCCjPhHQvDWkKP7H8K6fPYtBBJt2tM7G8HmykEqGIARflUDLlvij9sP9j34Nfso6NoXjP4TftfeG/HeoT6lhtHtIYnmiCYYTfuZZkKAjBEmzORjf8wH5VjxVOsph/tKf94u1GaQ7qjk8XX3nB0mcpGv8U5WvH4U8S8z4UjQw9OrOeFp3XsbUIxknfeSo82rd278ze71uXVwsat21q+uv+Z++3xM139g/wD4Kt+DvC/ibxj+0Fb/AA6+IWjaSIL+DU2jhUZO6SLE5RJ0Dh2jaOQMBJ8wydoT4GfDD/gnd/wTR8ST/HbxP+1jaeOfEcWnzw6JYaKYZnQOmG2Q27yYkYAoJJJEjAcg4zuH4Dt4y1OTaft86p/10NMj8ZahAoT+0n3q33fONea+NIQwEsoo1MRDLpXvQVWnpGTbcFVdDnUHdq2umjbvc0+ry5udpc3ez/K59lftg/GDVfil408RfGHU4orS68R+JJr14o0AWLzWdwnAGcDAz1OMnJJNeOaP428m6aZ7ltkjK3l7/lavIf8AhNpp0a4lvJWU8CJmJq7b+KrmaRUhuYwiv83y/N92vM4z4rw/FObRxVDD+whGnCnGHNzWUFZa2j08jTD4adKFm79T3PQ/GVhMyfJviZvvM3+rru/D/jVLiP8A0N2RWdVddv3v92vnjw/rXl7Hn8t2ZNyMv/xNeheHfFDxtHvmZF++kav91q+MliObWJ1xozPcbPxBeTSRJDNt+b5IZPvbf4mrN8bakdRmhbaQELjJXGenNcjo/iK5m/ffaVkf73zfLtrUbWX1mNJpQu9V+Yocg1+m+D9fm8QcJHyqf+mpn03ClGSzulN/3v8A0lnfeGtce20W3is2yUhTevvirMniaGPdsfj7rtv+bdXBDxUlpAtkjRq3l7dze1R/8Jh5yNDDYbTs+Zq+H4hr2z3FL/p5U/8ASmeVi8PJ4+o/7z/M7ybxVNDMiPc53Ju3f3qrzeKZpVDo6lPmXd/tVwlv4kmk8ua5jWI7tztH83y1Y/tiYM3kzMg37tu35a8GWK98f1Xm942tU1aPbMjwsf4tq/3v9msHUrh5GmdnkXyV3eWvzNUVzq9zNtmO0hvnRv4VrK1K8eRi/wBsYfN80K/wr/eqPrEpbFyw8YwJLq6hWSF0/ii/1jN935qyZPEG5nTf937zN/FS6ldeZG+/ciM3yfxfLtrBvj5itNs8zavzbm2s1bU6hy1MPH4jqI/ElnHsmmf5tmzzP937tQyeKkvpmRJlO5G+ZWrhm15FkT5Nqxy7tqt/s/3qrf8ACSOq703A/wATb61OfkOqvvEUMkawwvvb7vy/3ax7vWIR/oyIvl+V/e+7XPya/wCZC01nNv8A4Xb+Jqz5taRrdnRJP91komTGJr3GuQ/OPmX97u27v/QaWx1TbmMOzJJ92SuRvNSe5U+duVvvf7VX9Pu55o47n/VL91FZvmb/AGq5K0eY7KZ6b4d1BFaNHdVPy7K6+2u4b6XzvtMjL91FjfbXmGi6g62p/ffe2/6z7tdRpd8YlEOxkVVX95/C1YRlGPu8x0xo9kc82jzRsU2KfL/i3fe/4F/FQ0aW9w0EcKu+z523fdraktXEYSZ/uvt8v+KkuLe5aN0hKl1+Wvj/AGnN8R+g06PMc4y+TJstk3bvv7n+Zao3kflu8yfIrP8AdX+Jq2b61SNm2MzFlXbWHeXH3pZnYsr7kjWtY1OaHunpU8L7vKc/fSJMzpMm6sLUlhWT99J5YrZ1SORWKJcspb5vmrG1RXkczfMrr8yL/C1dtGXuHV/Z/u6RMe+bciTI+9/4pG+7WBqK2f8AqfM2M38VbF19pmm2P0Z/urWXqDeWvkvtZt/8P8VepRxHwnnYrK5cvMZDb5PMeRGXa33qGnebefs2xFRf+BNSszqyuj7/ALzbW/u0lrGkmx0K7WTc3zf3q9CNaLifK4rAzpyL8MKSQ/P8zf7PzUyT5t8Lp/urUunw/Z22JMrp/H/tVaksfvSQo21f9n7tY1Kh53sZy0ZkzW+1Vfzud/3V/iq5ounPtbZ8v+zsq3b6TGsiTI//AALZWppun21yrIjsZV+Z/k21Eqn9446lM+hvh1AIv2dEtwwYf2PdjPrzLXhFhoqNJstrZU/vNs+9X0B8P4PL+BUcEgz/AMSy6BGfUyV5PpemvMqoibPnbav91a/afFpxeS8Pr/qFj/6TA+gz9L2WDT/kX5IzbPQ7Zdzo/wDBtWT+7V9bJ5LhIZtwRtu+Ra3rXQ7ZWTzrZcSfLt/vNVmbTRHtSGwXydn3a/DKlSHwnl0JSiYUmnfuVhT98y7tit/FWfcaTItwXtrZRGr/AL3d/wCy11raXcyRlIbNR8n3o/vMtQyaG6Wav9jV1VfkjWX5lrmqS9melTlzbnLzaebiQI9tJhn+6v3l2/xVWazmVfJRPl/jZk3NXYRaS7Wzp9mkRFXf9z+Gq13p0f2V4fm2fe2su35awlKXwnTT/mOSuLVJo/OTbuZ/vVUkZ5I0m+7u++v3dtdDcWKSQu/2b5P4W/irEuNPm/uRtKybvLV/vfNWfN7vKa/3iOHYshSeba7Ju3feZamtW85lhfbtZdyN93c1H2PdCg+x7JF/iX/aqeO18nYHffK33KXuRIjKRYs4bmSSJCVVdm75f4a0I4Z41W2dF2L8zMqfxU2zsXZ0f5fm/vfLWxHp7tHsSFt2/wCRt/3V/vVySqHoU7/EVFsUmj37Knj8u4ZLN3jC7vnkb+GlaDeG2fK/3dy/db/eq1a2SbkuYUYRs33ZF+9Vx5ZqJ0U5E1hH+7aaFFJ+75bfKu2tOzX7G7XNnDu+8v7tN21v7tLpVrDIoeFmVW/hkStmysYVkSZI1T5/nb+7RzTOqNT2exlWMf775LZVK/Nu3bq0mt3XaIXZzIn+sVflVv4lqSa0RdSdERvl2v8Au0/hrJ+NnjhPhv8AD+bUvDztNqcz7YFVf3Vuv8TN/tV6uFw9XETjY480zShluG55y97+U7nQfBNzeRp9vvLexST5lkupdjbdv92tBfhg9xZyw6J4z0u7uY03W9vJLtX/AGa+I4fjd4z1LXpb+8166eS42rceZLubav8ADXR6D8cvFVrfJdWesSJJG+7asv8Adr6GngadP7J+aY/iXMMVV5oS5Yns/wAZvFXxa+GsLWeveDNPjtvveZprM25v95v4q8ruvipf3FoupWviFV8tvn2y/d/2a7W4+MUfxK8A33hvxg+97ja1u0b7pFb/AOyr5S8eXeq+B/FDJbXLRpH5iy2q/dZa640YdIniyxeKqSvOpI9b1D9orxbpuobLbxPJ/wB9feqCH9p7xOzDztY/d79yxt96vK9S1Dw9Haw39s/mpNEsqNJ95W/iWsG68WWbzOn2aPbv27t1V7Kl/KNYnFR+1I+iof2ltYhjDpqv3l2vGz/+PVNa/tMX9wwRL/5lf5l3fe/2a+arXxPpskmx93+z8/3asf8ACQabEu/7TJu30vq2Hlq4h9axUvtH0lqX7QmvSRj7Hfxodu3av8X+01SQ/tD+IXhihS9YfL8zbvm3f3q+arjxVD5izf2kzfLjb/dotfHDruS5vI3Tf8tP2FLpEXt8RGPxn0+37QmqzSbJtYkYLB8it821qsn4/X80gd7yOXd8ybv/AGavmqHxk7fxqf8AgVI3jK/U7PtHy1H1WG6iH1nEfzyPpmz/AGhpoXZLnVN3mf8ALOP7rVctfj99oZEsPFDRMqbfvbvmr5Sm8ZXjP532ln/h/wB2o/8AhMoYVZPtKr8/3VSl9XpS15R+3xS+3I+rtQ+N3iTa6W3iRZpZE2/M23d/tVGvxq1vT187UtSmilk++0d1/D/s18pv8RNrfPeNtX5fl+XbVab4tTKvkpebgyf3qtUIR15SY1cRH7R9oaP8evD1wrQzeNmtvkVUa6f5lb+7ur1jwjcaJr1rDf6br1rf7l2tJDP5n+7X5fX3j77Wqv5zBlf+Jv4q6b4W/FLx/pOqInhrxDdW0i/xQysqr/tba05XHYxkpVNZSP051jXtE0m3ijS//eqm1Lfd95v7q1V8TfGbwB8EbGPWNVe31PXJomS301k3RQ/3d3+1Xx3b/tCeJ7jybzUtea5uLODZA395v4mqlJ42vPGniJZtQvGY/ebc+6oi5SkZ+z5Y/EfXXwz8feKvi14i/tjxa63Vs0TbLNfljj/iXbWf+2F+0xbfDL4W3k2ia232prPy7VVT5d33fvf7NcZ4D8XQ6V4QS8sL+SP5V/2fmr5T/bg+Ll/428WLojvGsNquzyY//Qq1lHl+EVJ+0lzHguqXOq+J76bXtVvJJrm6laW4mk+ZmZq9S/ZB/Yq+Nv7ZHxd0/wCD3wd8H3eq6nfXEaZt7fclvGzfNJJ/dVa534c+CdX8eeItN8H+FdEa/u76eO3gt1T/AFzM33a/pO/ZO/ZQ+G//AAQd/wCCTPjX9rvxpplo3xHHg2S7uLxk+ZLiZdttap/tbmXd9K3hDlpc89iqtZyqqjDf8j54/wCCbf8AwTN+BvhT9rh/2UPhnNHqUXwtij1P4zeMm2+ZqWqfK0Onwt/DGrfe2/3a/U7xZDpt19pRJlhMP3WVv4q+Ff8Ag2n0maH9kLX/AI3ePXkbxN8R9fuNZ1a/umy0ytM235v7tfYHxO8QWdu815C63EMiN5U0fzL/ALVfknFGN+s4ySX2T9I4fwTw1G8ux578ZLPTP7FZ9YSzumZW3rJ/6FXwT+1B8H7XUtQbxP4eSQfat0UtrGyskK/7K17f8ZPjTqV5qV5o9hfxtF5+12b7yqv3dteLeKfiBpusWo0q/v44Nrt5Um7azNXzeFnKW7PbjhY+05nufHvib4Q69ot1ea3rtzdIiy7ovLTb93+GoPFljN4w/Zz0nTbzzm/s3xyqpcXEW39zJH833a9d+LvjLTbHS/s15qv9pSSbldVT/UyL/Ey/+zV5pZ+NpNe+Gut2d/YRomn3tvexLG3935fu16FSpXnS54n0OUVI0cQozOo+D7aJqnxE1jw89ntfT/D0n9msvzKsnl/K1fFfje6vL24lvNRud9y0snmzM/3vm+7X2V8H9Pv5Ne8QeOfDd+zyafo0k6Qq67pNy/d2/wAVfCvjPxJNLfTJsVEaWRvL/iVt3zLV5LTnWrzkYcQSjGhYbY6hpGlTx2Fr+9nupdnmN/DWj4ksZtEtfLfcV/iz/e/u1jeA7LTr7xpYvqR3RM//AAHcv3a6j4rSJb24eFF2ebt3V9HiFy4iFPufn81zRk2ZGh77y1d0RY1/hVq0dIW8sYftTpJ5bfw7qq+DYXa1R/l2yP8AxV0t1ZpJDv8AOVAv3F20qnNzSMpa0lpqVtO8SPYzM/8AC3y/f+atqx8XXMezZMzLt27pP4Vrk9Qh8y4Kb2VW2tuWtvTYd3zx7v7y/wCzXnVox+I3wdWcauj0O+8M332pD5O7bN8/zV0UPh68uYd/ksu35lhj+X/vquS8F/K299rMrqybq99+G+l2HiK4jmgddquuyFf/AGavDxlT2crn0cf31I8x8M/C258UeIBZwurI25l/3v8AZq74q+EV54f8RW+g3Ls0cf72eT721f8AZ217+3gnSvAjDxK/lwvbuzRQxp/epfh7oOieLPiM0z3MKXKy7UvLr7qx/wB6vOjinKfN9k4Hg579T578O/B/Uvjd8UofhLYaxNoNrfQL5F5fN5G5m+6zf7NenfH7/gkh/wAM0fDePxr4q1WSHX47rbYatap9ps/LaP8A1m5t275m+7X2Vb/sT2fxeWHxDoT2o1a3i3Ws1w26JmX7vzfw17BP+xL8ffEnhGPwf8Q9YZrCGLcvl6izJG235Vhr6LL81lh+WNOPzOatl9HFx5amkj+cvUPBlz4R1680SS0keazlZJ2kgZP3n97a396uh0e6mjsR9pdvlXb/ALtfqt+1x/wTV8MeF57GFP7Q17W9e16zs1uL7a0vnNJ833f4VjrhP+CiH/BNn4afBfS9Qs/ha8b3Om2dusW3a7yMy7pK9avmmGxH8RnJ/ZWJoT9nA+Kfgi/xEXWJLz4faVNeSSRNE/lp83lt/DX2Z+z78UPjf8F/B8viq70G4tbqa1aDTbeSXb+8Zdu5t392pv8Agi54H8BxeNpbD4i6V9pSS88ho5Pl+zsy/eavr7/gsD+z7Y/Db4b+C/iR8N9P3aJbzSWGttb/AHbdpPmjmk/2W+7XkxhDF47kPoKdGvl+GjPm+I+BraH7Cs32+8865uJZJ724Z9zSTM25mak+0JcMyIm5fuqzJ95v71SfJDv2Ooimf/WKv3v9qq6x7ZDH8zlk/wCWdfWunGEOU86MrT5hqSTNt+8zqu1l2Vcs/tPltDbWbOkf8KpSraQyKltO+5vK2/d+bdVu3s59pG9drfK8jN97/drkj70fM3lzEmi/vpFme5jVW+Z12/Mv+zXYaWvzwiYqdzszbWrntA0fyZmkeGF03N8yv97/AHq6zT7cf8uyLv2bZfL/APZa9DDx9nozz63vF/TYUmupU+XYyfe/iq+s3k27w/MHX5VVUVd397dTLNfJtfORI9rNtXbUL33l25e5hkcM+3y12/u69WjzchleMd5FDVtkyp5IaNlbc/y/eWsa6vJmke2mCpu2tE0O1l/4FWzqypMreTN5X+1t+9WDeW+2GW5877r/ADfJ96u+jGMfiMZe7rEoveeZJLDDNGG+7t21ctm/4p5mVM/uXwBznrWf/qo/JeFisnzeY33Wq9ayGTw28jMpzDJyBx/FX7b4ORis0x1v+gaf/pUD1+G1fE1pf9O5fmjhbyaaONvJtt259rNv+Za5rWrhG3u+51X/AGtu5q2dW1Sb7OZn3YVWV1VfmriLy8Ox5kTG5/vf3q/JpR5o+6fEynzSuMuLy5VUh+07Ubcz/wCz/s1qaPdQWqm/v/uRruaRf/Qa5+FYrp2S2hYBk3eZ/tbq5n4pfEKwtV/sTSpvlt3b7RJv+Vm/vVzVv5Tlq4j3TM+LHjqxvry51KGbY0nzbV+ZV/3a8E8ZeKPt146b62PHni8XE2xHz8m2uCuJJry92Iitub71L+7E8/l5S1Hqrxrv85lVf7tTQ+dI38WGXd/eq54f8J3l2vyQ71kfbXTN4Lm0+NPOh27dvy1pyi5oHJxw/d3vn5PkqrfTOsjb9qL935v4q39aW2tWaBPv/e27Pu1g6kqTf6xFbb97dUSLj8Rj3W+Rj2DfxVWVX+5sXNX2h3ebsG3dVbycKnybd33m3Uv8JfwkfnZ+T5v73y1e0W4eOb5G+VfmqrN8sfH+7SW7OPnQZ2/+hU/hJPVvBN5Nq0aQvhnb5fmfbXc6b4PS8jZDy/8Atfw15J4K1j7HdRTO/K7a9r8KaklxarNC+5ZF27l+bbTjIzqR5omRfaK9kyWr7X+f+H+GlttHudweZP3Xzbd1bEi+ddNvhZVjlbc2z7zVNHa2zMuxGXb/AOPU/h1MYy5TM0y38q6/1O8b/u10tir+SqJtSL+8tZ62W1lTZlVb+H+KryyfY7dt/wDu0lHlKl73vI4/xpeJpt8+xPlkl3MzV5r8SNBm+yxa3psnzruZ9td38WI3t7WGZLlnG/e1ctperJq1vJYb1YN/DIn3Vo5eWRpGUpQKHgfxMmsWPkvdf6TGn3WrpljeRXT73ybmVa8l1YXngfxY4hRkG/dt/wBmvUvCepQ65ZpqSP8Ad+8u2l/dCS+0LJDunUp8m1PvNUGUWQf+g1rXlvFtZERvv1nzxxhVR5vn/vVUZAVLXVrnwP4s07xVpk3leTcKzzV+lP7NPxQ034reC7LUkeOWWSBWlbzV+8v8NfnNcaXZatYvprso/dNt/i3NXtH/AATm+Klz4N+JUXwu8SXn2e2vLjZbs3/PRvu/99V10Ze4eVjMPzfCfc3xCiuYTaLcLgfvNv0+Xivqb4a+E/CnjP4T+DBq17b/ALvT7ZJSgzIo2DK/+O185fGvTZtLtNFtZmPEU21T/DyldR428Q+Ovg1+xB40+O+mWtzMuheBpZLHarbftEsYii+7/d3bq/Y+KaV/CDJor/n5U/8ASqhyU3dRU+p+YPxm/be+JGrftsePPjT8H/idrXheVvEE1jolxod60EkNnD+5j+b/AIDu/wCBV9B/GjU9Q8X/ALLV3rninVLjUbvUdEs7m/vbt90tzM7RO8jk/edmJY56k1+atlPc2zrctc5f78sjfeZm+Zq/RjxzOD+xdazuw+bwrphJ+ogrz/DGLjleeP8A6hpf+kzP1ThOKWBx6X/Pp/lI4X/gn58Sv+FK/tDeHtY0FIYUmvVS6aT723+H/wAer9Zf+Dpq30f4w/8ABIf4fftCaa8bzaD400u4imX+Hzo2jkX/AL6Va/EPwrqD2OsWmo21yqSW8qusjfeXbX66fF74n2P7U/8Awbl/Ev4Xatfx6hrfhHS49VttvzN+5mWTd/3zur8hjKUKyZ8NGUbuB+bf/BP/AFKLVfFV/dRyK3/EjIYr6+bHWH+1vcT2vx71N4UZ98NqNo/64JWV/wAEt9Z+3fEHWrDDDy/DofaenM0deqfFv9nr4hfGr49X9l8PvD8+p3c8UCJbWkO+QkQLX7JmNWNPwKwspv8A5in+VQz5JPFuK7HhskyXVn51q0e9f9v7tdT4B8aJrVr/AGTc3K+bC3yN/FJ/s1yd54d1Xwrq1zoPiGwuLS5t5ZIpYbqJkkWRfvblrmhrT+GfFiebuWOR12t/tV+KLklHmiduHqTjPl+yex6t5M0azJHu+dvl3fdrnr5XaTzt8brv3bf4q39FjTXNJTVbYfMyMzeXt+Vqo3Gjw+csMMjMnzNK2z+L+9RKpy+6eh7GMveMUzSGZnh8wL/B5jbqg8yaP9yPmDPudmatB9DEe6ZNzqvzI1V7rSfLV5nfyX2fP/tVlKQ40e5Sa4dZPn3EL/FuqC4unuN+xFG3/wAdq42nu670Rm+fb81Rw6JMtwdiNsb5t22sJc8Y8xtGnzSI7e6u2h2TJ8v8LLW9psyLHDC6M3z/ADsv3qp2dg/mO+zYip/301aFna3K3Cwof9p1b+7XJUlPlOynTgdNp948q7E3Af3f4ttdRpWsfu4Xhdk2/wCtX+KuN0uCb7OuyP5m/wBvbtrqND/fL9phRmj/AL2za3y1w1K3sdT0aeFjI7rSte3XG4zSb/u7mT5q7fwncNLHNF5bqse0IW79eleX2104khm875Y1216D8NRi0utsxkUurBj3zmv0vwTxMp+JuCj3VX/01M+kyLB+yx8J+v5MkvtQl+3TIoUmOVgHY528+lI+pJbgzWc0kn8P935qo38yw63dCZt26ZsH+5zUunxpM0UzvudUZm3L8tfAcTY3l4jxi/6e1P8A0tnHXy+U605eb/M0o5kZUmRGaRfmdVl20lvdO0zzW3mBPuyt/ep1rZw7Umh5LLtbd95alk0+aTDoWDx/wr/Ev+1Xz8sd7w1l/uDftW7YjvtWRtv+zRMr3S7Lm42tGjbl+7tX+9SzWs5uJbZNqJt3f7P/AO1Uc0LrMnkp/wAsmXdIvzf7tb0a0qn2jKph4xhsU763mMf2l32/PudV+bctc7qVs7QvNNDHmRGVFVK6uazeGFzC+Cr7mVf4WrOutNhuITM6N9/97/D8tejhqnLH3pHlVqPNocJqG+PaiW0ats+7Iny1j6gHtbrzhuQMyt8v8P8Au12WqaHbXcjonmbd275vu1QfRUhdN8O5W+/t+Za9WNSPxHnVMP8AzHI3SpJarNCn3Z9qSK23dVSaL98zpuy332V66m68NQxxsZvkfd8u7+JqoXli+nr50M251VU3Mm7d/tVpzcxj9Xlz+6YMNgkKqiJv8z5fmrSsVSJQjwqrr8m7d92ntp7+c7787n27dtT2NjlVtkT5PvIzJurmrbHRTo8s+Uu2t0V2o8O7b9+Nt27durqNHvIVj2b8tuX95I9ctawvGpTzsP8ALu3P93/gVbGnXD/JbO+9lT90zfd/2a82R6Macoq7OtuIdri58ld6vuTctUru5/eK77d/8S7K6G8091jLzRq7fw7U+6tZGpadCsf2yZ1RNv3tn8VfH/aP0ijTk4+6c1cfvrdXd4yV/ib5VrntW/eStMj4VX3Sr5XzN/utXVa1HZq2yGHIb5tsn8VYmqR3M0e90bcqblhVvlrop+6ezhcLzHH31+FGxJsvH8yKsVY99vZm2bVZv9uug1az/dukO5NyfO277tZeoRwyKyXKRllVVaRfvVtTqez90+gw+X83xHLalazNMro6s8f3FrL1KB9whmdUZl+7/FXTaitnCv2nzW2b9yRqm5VrBvo4M+T5LM7N/rNn3a7qNbmFistjymLNYusZTequr7U3VFDbzSN9mdNzK6/Nsq/IEhGzf8sfzf3m3U+1sRGp2Rtlf4m/ir1qdblh7x8Jm2X8vMP0+z3W6/J82/8A1e+ta30e4uIx5I3bfl8uT+Ko9Pt0WOLzk3P97+9W5br5sib9oLIy/L/d/vUe0lzaHxmIo+zgVbPS2k2OkO1I3Zdv8S1sabZz+RJtdR86/Lsqxb27sphf5ol+bzF/iWtPTV87CQuzwqu528rbWP8AekeTW5ep694Mgf8A4U/HbuQSdOnBOMZyXrz7T9LeaH5IZEfZtbd/C1eleE0UfDKJFjZ/9BlBR8ZJ+bI9PauX8O2MKyKRCy7t27cn3a/bPFybjknD0l/0Cx/9JpnvZ5BToYS//PtfkirDp5kkjTyVLL95vu1oNapFA2+zVPn3bt33v9la0rezS3V0SCORpPli8x6kms0Zvn2u6s235flWvweVT3uY8ijTjHVHONpsykbNqyf8tW3fMv8Ad+Wl+y/uzYTRq8m3d8v8K/xVtTaTczKsyJuPlf39rfepI9JdZseRsVXVmb7yqv8AtVEpe0jaR00exgfY/s7Jcw9NnzKtV9Ss/M3uLOP/AGNr/eX+9XQx2qMzukyrGzt8q/Nu/wBqqtxYwuomhfak3y7m+Xc3/stc0pe+ejT5pR90468015WkvJnyGbb833fl/wBms6ax+Zfs20ov+xXZ3Wiv9oVEEe7+JWf5Vqh/ZdmsLQ+TudpWVZNvzUv3fNzdDSUaso2OXWx875HhZAv3dvzbqS10v7++3Ziv8Lfe210DaXCyyvC7Jt+82371Q29nN5w8nbj/AGl+9/s1MpQ5gjGRDaWszXHku7bV2vtb5q0V3zSBETc3zfd/9BpYbea1+dLb7z7n/wBpaufZU3JM7bwr/e/+KrA7YxlErQ2EFq2x08pvm3/xfdqzZW/+ledDD91Nyf7W6opLV47hrn7Mz7mZUVW3bq1dFh+0tHvTeFRldt/zf5WnTlKMd/dNvinymtoujJIqWyOyrt3Vu2fh+SaNzJ9xU/i/ipvh+zhiX9991vuMz/w/w1oeKlOm6HPcwuzn+COP+9VYeM62IjBG1bEUsJQlVnLSJ518SvjNpXhHVn8N2d5HNqUjqyQ+V81uv91v9qnfE7VPDfiDw7b6CmlRxG8t/n+0L86/L95a+Z/i43ir4f8AxQPjHxJDIrXFxulVnb5m/wD2a9T+I3xFsL7Q9A8bW95DNb3EH3VRtsP8O2vvMJhY4SlZbn5BnGYVc1xUqjl7v2TwLxl4fn8O+IrizR2T978rf7NOs7g/Z1dPvr8qSf3q6341WtlfeV4n0p1KXEW75U3LG392uHtLh7hVfCl1/hX5a7tfiPJ5vcOp8L69MsywpNtO/duZ/u1x/wC0NDDNcR31s7Zk+8u+tCG8TT2aZEZTt/v/AHa574iXCapZ72ueFTb8zfNUy94qPvHDWOqXMKrZ3T70/g3VVvFRpN8Lsqt81LM/2WYOiZFRXVwksexIP4/vNT5eXQ2jLmI2uHh3bJttEupTLGu/cw2/w/xVWkVGTeqN96opG3L9xcr/AHqfwxD3i39oeNl37iqr/FRHqm5hvHy/eSqDXW1Sj9f7y1E0zMqyZ+bfupFcvKbS+IEDf6za6p92optcdlKQ3TL/AHKyfOf77yc/3v71EbIdrvubbVfZFymnHql2u5xM3zff+annWpljH77ft/iasuWZ9xpPtLrDj5TUi5ZGlJrlzdSEu+Vb+Gq11cI2E8mMVSeR3QPv203zMqv7tjtoHylppLfcifdrsdJvP+EV8NrPDNvuNQVkVv8AnnH/ABNXF6db+beJvDH+9urQvtSfVLpcriKNdkS7/wCGqk/dsxcvvnYaLrczKru+Qv3a9X+Ecf8AamoDzl3K33f9qvEPDsEN1Mi78D/Zr3H4c7NP09fJ+Uqnzs38NO0Ix5jGZ6n4s8ZW1n4fa2dGEdvBtiVfl+b/AOJr468dalc+IvHVxeB9/mS/dWvc/jN4wh0vwu8MN5IrSIy7f9mvDfAtrNqXiVpkhaV22/LULmlVHHlpw5mfrR/wa4/sAab8ff2lj8fvHug/atE8ExR3UUMnzR/bm/1P/fO3dX27/wAHjfxsvPAX/BPTwj8F9NuWjbx94+hhulSTb/o9rG021h/d3bfyr6S/4N/v2U4P2af2CPDd9qGlfZtV8VRLqeoGRfnZWH7vNfnj/wAHqOvvL41/Z/8ABkwZ7fytWvWj7Ft0a104ufKuRfZRllsZVE6j+0zoP+CLH7V9h4L/AGOPDvhjW4ZGjtYFgW3hXa0aqzbfm/iavpPx98dtB8ReHX1LQvEkM5+ZZbW3/dtH/sstfK//AASH+B/h7xB+zDpWg627Mtx5c8U0kH+pZm+b5q+ivjJ/wTu17wr4dvPGHw98etDN/wAfHk3zr5TL/wBdK/DswjTqY2c0ftdCXs8LC/8AKfPXxX+LGlahJND9jVJpnZrrzIvu7f7rV86ePvEtzHcPDo+ox3CQ7mlWOX5lWtL4qXXxR8M+K7zRNe8N3yhk/wBdCm6KRW/iWT7rV5neaD4k1icvdO0PnL95bVmb/gVGHwvu8xt7aMYf3jhviB8SJrqV4ft8flRtuTb97/dZqreBZLzWL93ke4W2uott1Gq7v3f+0teir+zdDqEi6lePHcJMnyq0DR7qztQ8F694Llms9NRltlTcjW6s33f71d3JGnEUJ1/iPObi8+IXgvXGv/DGsTQNbv8A6P5cu3ctcjqHgPwl8Qrj+yvElnDp2rzSs32yP5Vbd93cteueJG/4SzT99gjS6pGm+Bl+Xdt/hZa868YabYXnh5PE9heKt1DKyXVu3ytG3+7WeHqToTfJodWM5sTDX3jyfxF8GvGvhPxh/wAI24USQurRXG/5GVvutR8UJodNs4NKluYXuVddzQvu3Vc8ZeKtY1KEveX8kjxp8rM/8NcNobTeItYWa5mVoo3z+8WvocP7TFctWp9k+HxnLh5+yX2j0Lwvapa+H4Jk/hZmdW+81ak+tOsa22yFl2fut33qzo9ht9j7m3Jt2/w1LHpqeWn7lt0a/JXLWlGM+Y55PlVkT/2X9sjW5Tlv4lVfu1p2Nr5OD83+zu/vVn2P2mz3/IyozLtbf95q2IZEXY77fNb73mferhxNT3TpwcoxLul6lZ6fMuyP55H+bc/3a9t+A/jKG3mjT7Yrt5u542+XdXzrc6k7TCaSHcV/iX+7Wr4T8bPo99Fc7Nrxv8vmP8teRiMLUq0nKJ6+DxlKnP3j9AY7qw8a6b5M0MKrJF/rP7v92nfD34Q/2bqU32O5kuV3K0u77v8AwGvnD4V/tD3LQ29tc3m5lf5o/wCFq+mfgj8XtKVYftLySbhul3N8y7v9mvGlGUY8s/difU0KWHxK5j7F/ZH8NeM2e2sbGzjkMjbrVW3fKtfU8a/Gq50qDTZobGFNjI7R/Nt/u181fs5ftEeD9PW2ub+2ZAqbEa1+Wvq3wP8AFbSvGMca2w+zxhP9ZN827/ZqsP7Bx5eY58Zg6+H/AHihzROS1f4ReG/C/iPTfHnjN49Qk0WKSfTbOQLt+0MvzSf71fm7+0dq3iT9or42eILOG2/126CLTV+Vodv8Py/xfxV+jf7UnxO0fwP4Uub/AMlbqaGLzWWT7u3/AHq/KHxJ+0Po/hv4ral8XdHmtYvLlkllj837237vzf3lrsdOnbkj6m2X04Rh7aqvekdT8Efhanwr+H+qa8eNS0m/VpY9qrL8v8TL/s19ueFvG/w//bK/ZS8Tfs7Xs32qTWPDUkVncRxeYy3SrujZf91lr8yrf9oi/wDjJ4w8R+J9BuVh/tD97f2cKMqtN93d/u7a+tP+CZfxNm+GvxGikuVX+z3u7eFEj+bzGb+7/wB9V6NGNSlWjUUh1qcMVhKkHH/D6nwfY6Tq1nCfDetwzNqOn3ElrdRrFtZZIWZW/wCBfLUyxmRvOSZn/hddm3bX0h/wVZ+Blv8ABP8Abv8AF2l6SPK0bxZaw+INMWP5dxuPlm2t/D81fP8Ap2jpDH5DooRW2o2/7y19soc3xSPhKdaPLdRGWtinzeQ+3b827+L/AL6rSs9NT7ON/wC+f5tjbfmX/ZWnww2zfuYdzo3zLtRv4aljaaS3aF4dnmfL838VKNLm1ibyrRjuXtH8nyZnttsrR7V+Z/u/3q6Gzb93++3J/D+7+b+KsnTLXz40RHZXaVWfbW9bwwrb7/mYLu27vl/3t1enh6cYw944ZSlUkWVW1aHZ9m8vy/ux/dqtJHbKhmRN211by2+81TQ28N5IXm3MFfb5e7crLt+Vt1MuLdIIfv7PM/ib5mrtpxCPNUKGsWsMMrO8youxvmb5vLWsK8WBd0abcrEu7d/Ev8NbeqMzWM1s+5PMX7yurLt/3a526uHmmWFJt/8AFEzL/DXdT+P3ialORQvry2ZjDDu3yJ86t91Wq7bE/wDCMOVBH7iTHGT/ABdqzb7yZlWZEZNsv73cn3v92tCFw/hSVoyQPs0uC45H3utftHg875rjv+waf/pUD2OG4P61Wb/59y/NHlniiSaG1lmg/eu3/wAVXK2qpfXDQQv5vztuWP5trV0Ovb7yXf8AKVb+H+9tqtY29tYxy3l/M0McKs3zfKq/7VfkcvhtE+IrRlHUzvEnh+5sfD83lbVmuIv4U+ZV/iavnz4mWttoqun2lSv97fuauo+LXx8upbyb7Nqv3V8pNv3fLrw7xd4xm166+0u/zf7L1z80uY8r+JqY2r3T3Fxvi2vu+/trofhz8P7/AMTX0KIjE7t33KyvDOivrGqIkaMXkbb8tfV/wb+Ftn4D8Mp4n1VI0laL5d0W6tInNUl7vKjJ0X4W6b4a0dp7xI1dV3KrJ81ef/E3XLDTZJLa2mjY/wANdX8XPi08cbQ2r4Ma7UVUrwXxJ4k/ti4fz3Ynf95qzlU5pl06MY+8JeXj3TGZ5s7v9n71ULpoyrbNxb/dplvIjrsd2P8Au/dqG8Z4s84FVGJp8RFPI7Lv2Y3fw1Ey/KXxuX7zVIoSaQOflVqRIUjZo9mWb7u6jm/lJjsNaPzofP8AJ2rT7e3SSP5E3f8AAaVI23bE+7/HVm12R2+z/wBBqZRK+GAab51rcK6JuZWr2X4V+KJmsVsPlbbuZF215LZwoy7zGylvv12Pw/1r+xdSi3u3lfx/Luaj7PukSjzHpDTPMzTb9zbt21X+7UqyJ5fnec3zPurHvLzbeb4fuN83zVNJdJbqXd/l+9tZqfNKJHLH7J0K3Ds2/YrorL/FU1xdTLy/zbn3Iu/5WrO0G6S7j8lH27vm/d/xVq3FqFkO/bhU2/N/DVEc3L8Rxfxm+xyaD50Mf+rXa22vIvC+qeTqDJv/AI9tet/GAGTwu6InKu3zMu3dXhen3Xk33/2dTzfZNYy5vdOo+Lmg/wBqaTFrFnCu2GL5mj+83+9XO/C7xpPoN/8AYHmby5Gwyt92u70vyfEHh99NmdTuT+GvJtf02bw9rcsPksu1vkq5R/lLpy3gfQUapfW5vIfmH8DLVO+sXjYYT7v3P9msn4I+Lodc0/8Asq7uVLr8qq1ddeWm7986MtTGRFT+Uw7GMRzKzorD+CrV1dalpOo23jDwxc+Tf2twssUi/K25W3LVe9hNrKPO2/8AAa2PCujJ4ruho803ktJF8kzfdVqqn7szHEcsqR+lDfG7Tf2hf2fvh98TIHT7dLb3lrqyr1E8XkKSfrnIr9fv2R/2ePhb44/4J6eH/h54/wDDlrd6f4w8GW7anFOinzVkgU1/PX+wvD4i0XQvEnhDV7qR7bT9Qiazjb7gLqwdl9m2Kfwr+ij9jfVpvHX7E3gPwxpF2bTVNO8H2CxqOsiiFcH8RX7fxIpx8IcmXapU/wDSqh5b5G218j+cz/gr1/wRl+KP7CWrX3xd8J6LNqHw/vNTkihvrdNy2O5vljkq18X7s6f+wYl2n/LPwlpJH529f0n6z8I/h3+038GPFP7OXxi8PwXtlrNnJBe2VzFuZNy7fMH+0rfNur+dn9vj4Zx/Bn9nvx38HFnEy+FCuiiRh98W13HBn8dlYeHdSnUynPGtGsNK/wD4DPU+/wCBIVIZdj03zL2Tt90tD4s8H+MI76FP3y7f8/LX15+y/wDtr6D8Afgb8R/h74wMl5p/ibwRfWFnY7fMjkuJF2xr/wCPV+eGh69No98uH2bfl/2a9W0HxNba94fNt8ryLF95q/FYylzRPl6lOPLdHpH/AATd8OXHhf49eIdPZR5T+Fd8bAfe/wBIhr6E8P8A7U/j79mr9r2bxF8P9VS0lRreO8Z4VctC9ugbBb7vBrwz/gndqE178ZtahuGJNv4adI8/3ftENZf7UXiWPTP2uNZtGuioW3sy2P4c20dfseeYeniPAnDU57PFP8qhz4SpVp4lSW6R+on7cX7GfwE/bA/Yd8Qftk/BDQ2sPGHg2wW91a3h+ZLrdtVt235vu/NX42+OrOG+0eLUi+4xru3L/E1fY/wD/wCClX7ZP7Ofwn1j4UfBzxho/wDwjviCyZL3S9S05ZdrMu3zN33vu18oeJ7G5utNuE1W8a4nm8x55NqrukZtzV+IYCnUw2HVGfT4X5HQ43rurF7/ABep2nwD1j7ZpJtodpaRFl/3v9qu71DQ7aWTeltJn726vHf2arq5s9ShheGMLHL5TRs+75a+hJtFuftHk71d/u/7q0qkZU5nv4P97SOMutN2nfN8iL8u2qt1oZ2/uYZAv8G75mrvJtH8yApLCrfNtSTZ/wChVWbQ7lY3/cq+1FXc1YnXUoxitDhJvDMcciJ833tzfPt3UQ6LukfZ/vIq/wB2u8Xw680f76237f8Anp/7LSWvhm2hcoE2Ue/GJUaJxi6O8ceyaHbt/harEOl/vmeL5kb5WXb92ulPhkys7/d+b5lbd81EekvDtT5kT7u2sqkToox5ShY2MNuq23k/PJ8r7a09Ntd0f2Z3ZUX+FW/iqS302BJmj2bv4ovOVv8A0KtbTbFPOd3hjKrL93+KvHxEYy5j1sPzdCa1tflWa5hbCrtZY/71eg/D2ForecncQUj2lmz2NcdYw21vJF+//cx/+hNXbeBwFiuI1PygptBXBHBr9E8D4cnihgLdqv8A6ZmfTZQ28VG/n+RTvrFBqczbnLyTOdg7L/eq/pOmwzNvSb+Hd8v3akcr9qnZlUO0hUEt/Dmr+j6f8o2Q4T5mT/er8v4ol/xk2NT/AOftT/0uRvOMXUlbuXNL0+2t5kT75kb5N0X8VW7q1RmP2OH51ZvNZX+7UkPnRqhR40+T5G+8u2p5vJaQQu+15Pmdo12rt/hrwVHmnzEy92HLymLJZvJCXhttiqu75v4qgWJJl+0wvvRvl+V62Psdt/BMrhvl3M/3WqvJYwqkoTcP4fMVdv8A3zXpUKxx1qPumVJG7wtbOm4r8+7Z95qz5rF7qaNLlFXd9xvur/wKthrPyZGe9RUh2bvv1Vms4Vm2Om9JvmRV/ir1aUuWR5EqMKnumRfaXN5LfY/ldv8AlnVCbR3WTzpkVTt+Zl/hrpWtUZl32rQpG23b/eqnqdq6x/YzMqK38TfdX/Zrsp1vd5TJYSMtWc7Jo9t5exAu+b7/AJi7qytS0+GSHYiKp2fJ5fy7f/iq6m40v5Wh2bj/ALTfvKx7+3SOEOm4FW+VVfdu/wCA1p7SfNZHRHB0ub4TktRs5vkheCRS3yxNH8rUklmlvIsPzI/zN5ez7y1u31j5k3z2bPtfcm1tvzVNb2264b7T5cj+V95vvbqqpU933jL+z4+1MG10ua3tTCiSNu+f99825v8AZrV03TXjYTeSybl2vGrfKtX7fSZvLV96qytu+Wun0XTXnsw6Q7fMl3bm+X5a5ec1+p+4WpmS4jDp5au3ypt+bc1QND9sjMMlttdfmZZF+8tXJY/OUyecqtH8q7v4afGyXC+dD5gb7ryN97bXycacoxufZYepGVU5jULVFY/3Ff5mkTdtX+7WBq1htj86Z1RJPu7fm2rXb3EbyQyTTIpSNd33/vVzer2Kbi88SqWXc/8As/7tdUactj6bBy5Th9Q09GbZDYeaaxdWiudzFLNY/MTc275v+A12l5YJ5ZmQMfmbYuysXVNLvFhWabcHk3KrMu1WolTlI+rwMonF30MNvav8m1vuuv8AdrEltUVuX+X5vlZPvV0msWMyxnlSy/N838Vc83O5Nn3UZf8AgVKnzU46HoYinSlQ5jNvrdGhG9FT+/TI18sr5PKt92rs1i80fk71+Z/4aiVXhV/k+98rbv4a9XD1OblPzzOKPUtaXDD5bGGbe393dWrp91bLcFJEYlk2p/eWsRZpoZGh+5uXan95quWeoOrOjpIP4E3bdzV6FHm+I/Ls0lyz5TpbUf6Ps3/vFT5FZ/vf71bWkzblGyFf9uTfXN2epJ5yRzQsqs+FZq6PR7oQ3AR+Il+dG21FVVIwPnqkrz5T2TwiNvw+hBJGLaXJ79WrN0+zM0guYXbZ/ufNWr4YZR4FicsMfZpCT6ctVOykeNY/szxiJduxll+Zv71fsHjK7ZJw6/8AqEj/AOk0z67M6EqmHwvlBfki3bxwthPsyr8nysq/M1WFs0muGCfIjfMqs33VpNJjcsf3zb9+1tzVqw28Ls6TIuFRfmXa25q/BqlT4YxOOOF5feM2PT03J/tf7VU9WtUhSZ4YdzfxeW/y10kbov750XLJtRdnzNWfeNbXEbpCmP4ZY/71XTkKUY09jmrlblo3+zJHv/jaOqElrtY3O9Vf7rfJ8tbt5pLwt51rCrt/zz+7VGRX8kOEUfIypuTdRUpwLoy5TLurPz1KO/y/7P8Ad/vVX+zorGZ4Nj/9M/4a0biGaGPzH8vP3dy/3agby41875kfZtZv726oUfsov23ve8ZF5HDIu9Fk3btu1fl21R+zwx7/ACXZXVty/PW3fQzR/ubx2YR7vu/+g7qyZrN9rn+Jv+Wcj/dpSjGJfNzEbb7hi6Phtnyxsvzf71W185ZDCjthk3MzL/FVNmeSREm3fL8zqtXdPuoWWVE3F9rMqr95VrmlGZ105R5i5Fa7Zgn3l3/JJ91lrZ0e0SFU/cx5Vv4U+9VfRdkw+RFxt+dpPl2/7S1u2qoWWySGN0jVm3L/ALVc1STjLlOunHmL1jbrbvHM1tG8kf8AyzZ6o+Hfi/oll4yu9E1KzWaOGDY0cifMzVbbVbCxs7i8ufl8u32oq/Krf8CrzDS9JfVtYudVheNdrM3y/KslfX5Dgeb99I+F4pzSL/2SHzO2/aV8O+Bvjf8ADW80rStBji1G1l3W80lrtdmVf7y18d/Dm8vJvDuq/ArxOjW17Hun0hpIv3ny/wANfW+i+JrbQ9WiS5jmeVtu6ORvu15l+118M3+1Wnxj8DWarqOmy+fcLCvyzKv3t1fUfFSPhIynFHj/AMM9WtvFGl3HgPUvmaRWW3kZPm8xf71cf4o0W/8ACuuTQ9DH8jbm+7V/xJqFtofiiLxnoj/u7pVfbH8u1v4lrb+IWqWHjq3t/EKWCxFUXd/tNWcZcpcY8vwnIR+S1mu/5dvzfM26uU8RXELq8L/NW/qF4kJe2+bd/e/hrjdeuIbiR/O521RcYmLfQ7lkTf8ALVPzPl/d7WFXLry1Yon9/wDv1RjX940CJt/vVXxGsRGh3fPv+X7zK1Q3C/3z/wB8ir01u6xhPmcN/DVS6X/pn8y1JRQk3s77D92o5G3NUt0dzbAnNQfOFJf+GgcdwzJt6fK1Sqs27Z8v3ahLZC59akST5vegQ5mVfkAXO371Rec7fJimyLtaljX5hl6B8rF+8Pkpg3rgB8bqmGyM/PRbKZp0THP/ALLREI7lhpfs9nvT77fKm3+7S2uW+fZUF0yNcHZ8392pLePzG/121m/u0fETI6rwyvlus0O1TXq3he4v5rf/AFyqipXlPh9fsixzTOrbf/Hq7qz8TTNZpZ2Vts/4HWnuxiYSjzFX4talusSk0yuy/crc/YH+Ftz8ZP2jPCvgm2T99q3iO1giVvmX/WL8teX/ABE1OaS82TTbj/Ctfa3/AAb9eA/+Eu/4KAfD55oVMVrqn2h2/wB1d1aYWP7xGOLl7PDM/rI+FnhWw8D+BNI8IaZb+VBpmnQ20ar/ALKqtfhJ/wAHqVjMPih8ANV2KYvsGqQfe2nc0kdfvbpF5i1V33D5f4q/FP8A4PMfh5P4m/Z9+Fnxctot0fhrxXNa3kiruCLcL8uW/wCA1jXhOXOb4KtSpxgjD/4Jd+PLbTPgjpDwzNuhtY/3Ky/e+X71fT3jL9qq6ure4s3RbhI7fZ5Myfd3V+Zv/BOX4uPp/wAEdLtdiuY4tr3S/L8v92vXdb+NU11cMlzcssW/a21fmZa/EsXTjHGzifteCq3w8Kh79qGvfCLxBa3P2+2aK5aJvlVFZLf5vl+WvKvF2ofCy0y/+hyyR3CrtVFXd/wGvK/E3xFdbGYQ3k0QkT/lncbdu37teI+OPiFc3WoTXM2sNLMv/H02/bu/u1pRVX4eYKkqHPzSPW/it4/8K6Pb3l9Z2cMRkf70d1uaNl+7tXd8tfNnxI+NV5rDNpVtPMSu4O1vcbPvf3ttYXjj4lX+pRy2cNtazRTf62O4+9/vbq4Vdck+0PeWdqsMXy/LG1ejh6NWXxbHBUxsPhge3fCi68PeH7W08T+MJLdEhTcnmMzL/u7a4f8AaI8YeAPHGuPqvg/wwthffduri1dlW4/3l+7Xn2s+NLieFrN7nA/55791Zmk6sLy8Uvufc3zs3zVpHByjzSbDEZpT9lyQMjxZp9/cafcJsVGX+633q5fwrHDDfLHsY7fvqv8AFXqfiHS7OTT5P9J3S/d2/wCzXCw6L/Z128yHaNu7dXp4WtH6tKJ8pjpSqVec6ixk8u3QQozfw7ZKmbUZo2f/AENVTftT5/u1haHcTKrbIfl3bvvVLc303lt/CjfeZq55UrS1iT7SPL7xrTalCp3/AHCv/oX96ga4kjffyG+VWX/2auea6SaNX6t93/ZqRdSeFlj37l+66r/DWUsPzRsRHFWkb0379Sjncu370f8AeqrNvkuNzv8Ad/hVPvUumXELRomxd27c7bvu1p3K2f2NUWFd0f3q4pS5Jcp0+05/ecg8L69d6bf/AOu+Xcu3c9fQXwZ8fbrpLY37GWR925X/APHa+Zo5vLuN8abt38TV6D8LtWmj1RE38KyrXnZhho1I8x62T5hOnXjGUvdP0s/Zl8aQzSb7+8kRfKZ0jk/iavs34HePptvnXN5IdPj/AHrQyfIsf975q/PD9mjWnjVLZ0kuPlXYq/KrNt+9Xsni79pTR/DujxeG9Nv98ELK2s3DO21v4tsf+7XzFFTniLRP0mlioYjDF/8A4KdftueKviPdj4BfBTU9Lht4dy6veSy7Z5N3/LNf7u2vyk+K0Pj9r6XStV+0TfZ5WiTbuVWZfvf71cj4t/aA1rVv2h/FHjbVNakX+0PEVw8CK+1fJ3fu/wDx1a9x0/44fDfxV4VtodS1JWuo5du2aL7q/wAXzV9xDBf2dGLnHmf8x8x7SljY/u58vL9k8u+Cfxe174b+Plie5kjWaVYrqFn+Vo2/2a/Wn/gnHcw/FL4q6HpNpYeWt226JvK2xLtb5W/2flr8sfixN4G1rUIde0GzjSaOVf3y/wAS/d219/f8EmPi+3hCfTda0+8ju72wRoVj+80a7t21WqMTXoUXGrym+WxxM3Uw/N732T17/gujrGlXH7XvhHQNNljZrDwbJZCTb97y5F3f98tXx9YtDcXRheza23fcX/np/tV1/wDwWR/aB/tP9uH4dWrXDJP/AMI5dXF/5kvzeXNIu3cv/Aa5SxtbmZleMM67Fb5vvN/dr6/AL61ho1v5j4vH/wCxYl4ZfYtzepoQW8yqgRJPm3bFb7rf7NT2un+XI7Ikasr/AHWXdtqWHT0j8uF5l3tu3sv3t392ren2McfyImx2+baybv8AgTV6tPD8sfdOH2kqgabao8aXPV/m3/JtWr9nNlAiIwRXZd3/AKFTbW10+3ZU3yI33VXf8tWLiG2kjPnTMm2XduV/lVa7IU+aPwlQ5ia3ZI9z+TlNm1mZ9v8AwGmX+yS3ZLZ1zs27f+ebU+RUuGFs/wC8/usqblVdtQzWt5HG8xRkeNNzK38S1p7GUT06EY81jD1BtpO5GVv4JGX5dtYt98siwyXLY37f3afMtbmoRoqs++QN96JvK+81Y+pQpJI0zw/Kv/LOR9u7/gVbRlyyOiWHjy3kYd5G6xMsybv4lb/4mteAlvCcmCAfs0oyO33qrahBbMw8jajbW2Rs/wB1v7tXLZQ/hpk6Zt3z9ea/Y/BySeb45/8AUNP/ANKgehklJRxVW38j/NHk2oQ/Zmx1Pzb1X7y15F+1N8TE8N6HH4M012+0t89xcRt/D/davbPESw6dY3GsXnywxxNLLuX5lVa+KviRrl58RfFVzfwiSX7VKzRK33tv8O6vyLmlI/Os0l7P3TzrWNY1LVrppnfJ/wDZqteH/B2q6xcL9mhZ9332X5q9x+Bv7IHiT4lXyNDpTGPfu3N8y19R+Bf2J/B/gPyrzWPJdoU3y7v4f9n/AHq09nGMfePAeIl8MYnh/wCzL+zNBGqeKvE/7q3hTzW2r83+7Wh+0Z8ZLOzmfRNKvdkcMXlKsfy/u67j9or45WHhHR/+EQ8Lpa26Q7llaH5fu/8As1fFvjjxlf69qT3E0zFv7zfxVjKXtCqceX3iHxN4qv8AVLp5nmb5vlVf4dtc7cTSSMz/AHfmpsl5tkO8sy/7NNWYNL99sN/epRibR5ZFmGR1hZ/PbP8Ad/hpkjea4T7p+9upPM2q33jz/doZkk3eW/z/AMCt/do+H4g5ZRDa8i7H4ZX+RqI18uTyU+f+JGanMvmK+R/wKm/xA7Pm/wA/LVgWfL+YfPuMlTx2IWHZvwf4FaorCT5d6Q4Vf4a0Y5I2kWd03bf9il8IvckQWfnRtsdNo+7/AL1dN4VtUuLhN7qpZ/4nrFe33ZfZyPu7auWqTWNxG6chfm/3amURf4Tvtahm0uxhuUdmP3Xqj/ayNgPcqzf3qZNqlzfeHXhkdsbF/wC+q52TWt1vE7pg/d/8epylHluL4Ze6ej+C9StmnG+ZflrsJms5labyd+19rs3y/LXlHgvUlhvPIQZDOqt8/wAtenSXD3FuHRIwG+VP9r/aq4GFT4zmvirHB/wjUqb8rXzrqMiR6mU/2/lZa+hfilJ9n8LmF0+ZU+bd/FXzjq0/l6kyd9/zVlyG9OPKd58PdWmWRbZ9uGqt8aPCvlj+2LZPlrO8D3nl6hE4/v8Ay16h4p0mbXvDaJs37k3U485Upcsrnivw/wDEU3h3Xo5t7bWZVr6XhZNa8P2+pWwVVkT5NtfLGs2NzompvAybWjb5a+gP2e/Ey654b+xzfO1vtO3+9T+0FSPNHmLV9ZPD9xPvfw1Hod5Na6ojom397uZmb5a6TWNJ87e8Lqy/M0W5vvVzV1C9rl4du5X/AIq0fvaGMZQ6n2P+zVqFjrGl3+q2kmWljtlmQfdVlVxx+GK/az9kb4v+Hdf/AGQvh38W/h1cq954R09fD3iWzjkIaOW3IQlgOu5QG/4FX4hfsbG3n+HdxewS58y4VSmc7ML0/Mmv1R/4JmfCfxF8K/2efHh1lbm1v/El3Z61p9vdndHd2EqiQSRDsRux+FfuWfUpVPCHJVf7dS//AIFUPHxFSNOUklvsforFqlhq+lad8XfC211aJWu1jX/WRt96v50v+Cvk8culfHG4jb5W8XX7KT6HVeK/oG/Yu8RnXfh5eaDc7cWN15aIvZf7tfgx/wAFMPhn4g+Kms/G/wACeENPkub1td126t7eJcs62t3LcsAP9yFq4fDWD+oZ5Se6w8l/5LM/ROCnFZXjqn2XRb/CVz8gbxRJGJk+Xd/47XR/C/WkW+WG6ucqz7flrnWk8u3NtNuRlTbTdFmez1VXR9qK27dv+9X4zKPJM+YjZo+zP2CNJi0743a3PAi7ZvDTNuVs5/0iGvJ/289TbSv2vdYnj72tluO7p/o0dewf8E8rqLUvFuoX7gecNDZSR/dM0RH8q8b/AOCi0JX9prWZliyWs7M/lbx1+1Y7/kx2F5v+gl/lUOKD5cW/Q634U69Dr+iRvM/3k27l+WovFGiyQtNv2vu+4q/w/wC1XmHwF8ZPDfLp83CM/wB3/ar27XI/7S09LhDn5Pk//ar8R5Z851VPd1Ob+E+gz6X4qea2+ZpGV/lf7rV9U2/h/wAyxttV3rNK0S7mX5W/2q+cfA9x/ZviCPzvLTzGXe0n3a+pPDOmw3Wl2z2G1921X8t/lWscV3PbymVoyUjL/sOGSSVP3ij5n3bf4qhm8K7fk8qNv7zN/wAtF/vV2cWj/O8zp8u/5GX/ANmqWHRZo2Donys/z/7P/Aa4Iy97mPW5eY45fDsIHnJbNj+63zfNVa68NzNM3lQ7g3zO33dtd/b6L8/kukmVZv3i/wANQto1ybzeifMsW2X5PvNWsZF8qPN/+EfupJpPO8z737rb/DVabw26t51zD8yvu27/ALtemXnh942Z54WR12/Lt+9VSTQfOje5RPm+Zt3+1/dquXm94qnzROAj0vKtsmU1NZ6fM100c0y/vNvy7PmWuqvNHezj857ZfvbnVl3fLVGaxhWRvL2gN/E33lry8RTnI9XC/AUre38zZZ+TCu6Vn3SLu+Wut8FYEVwocNtKjI/GuY8txtnR5FX/ANlrpfAkkslrO0wG7eOQc561+g+CcZR8T8F6Vf8A01M+jyjl+tRt5/kSecp1WZmfcquVK/3a2Le4gZXRXZVZ9qfN/wCg1zGq25Oq3DRL1fMjf3eatafrVtb2f77cxWXbtZfm3V+T8VR/4yTGt/8AP6p/6XI6pStUfqdZDdeWwhmeMqu0bt27/gTVat7rztsW9lmZ2+bd95a53T9Q3fvkRl+b/vqtK1uEkuw+/P73cjbP/Ha8GnHlj7ope9K8jUmjRt37mOTa/wB6P+KqrRzRr/pLxoI5Wba3zKy1JHev8sNtCsSLufdG/wA26nyTOy75kUbvl2t8yr/wKuqj7xjWiUNzysyFFVJF3eZ5X97+FqpfY9t1strn5Nmf+Bf71bUlu8m3Ztx93cq1Ev2OGRfnjVd/z7ov9mvUp1IxjocFTD/aM2GR928wxumz5tvyt/wGotQhs2s1S/8Al2/Nu/iZqv3UKtGyPbRhpF/5afwrVKS3jmdI25C/89P4a6aco81xRjywMi5tdqMHhaRm2/vPustZM0KLM9480Mpk/uxfdrodQs0jxbXMG9P+Wsbfd2/w1lyQ/vPMh3IrLt+5826unm5jqjTj7pjQqjeY/wAuxtyptpI9PDKqRWzblT52ZtrKtaDWm26aEOzLGnyNIvzf8Cqdbd1uI3+6kn3lqZS5S/Zd2Q6RYI0iPcwrtX5F3f3a6/TbWz8yK2+6v3l3S/K1YNmsLW/nJbRo6xfIyv8AL/u10WiyWduy74fnk+58n3awjHmmRKnyxsZlkqW+/wCzTb337lb/ANmq/CryRiW5hVfLTc26sqORGm+R12Ku1G3bflresY0aWP596yfLtb+7/tVzfVeWPvHRg8RDnMnUNJ3XGy2dWWRd37n7tUb7T4Vgl3vtaZ9qsy7ttdZHapC3yfM0K7UkVfu1TvLNLiObzrVmVvmt41/ho9n7sUfV4PER+ycBcaNC3yfZm/h3x/dasbVNLf7QyTI0iqjNEzS/davQdS0+bavnfKyurbVSse80W1W38mGzW2VpW+9/49WVSj1PqcPiuXU8u1zQ/tFudm0bvm2s1cNq1rDb3R3wqu6LajR/dr17XLGGNXSFFeJW2LJIm2uL8RaTtm2WyY8v+LZ8rVzSjyy5uU9KWOhKHvHE3NujLs2bR/Gy/wAVZ9xJvk2SIyeZ8yK38VbWqWrpcC2Ty0/vs1Zd1bw25NsjszRv8+7+KunDx5veR8Zn1TlgVwqbm877sf3FZ/mWiO923CTeZG3l7vvfwtUd0IoVZEdUP92qzRzXDPeJ8nybtyr/AA17uHjGUD8mzKXNP3TpdLvNsgLurD/x2up8NapCzJv3I38bSfdrgdNaRYd6Pvf73zPXQaTeos7pNCoGzajbqyqPl0OTB4WdSZ9FeELjz/hrDcu2c2UpJK+7dqxtN1SBoRCky75Nq7tn/oNXvAsjn4OwSZJYabNz7/PXGaffNt2Xn3vlWJlr9d8ZFB5Hw7zf9AkP/SaZ9tisPJ0qKttFL8jvPtzSS/vo2Pz/ACf7VbGntDcYh37VWL5P96uJtdYe3aLzpGKtKqbfvbf9pq6O01aFd/kxeay7WT5tu3/ar8G5bdDnlg5RidVH+7j2TTRgNt+b+L/gNV9Qt/Lh875VVvut/FVZNShmj2PlZJEoW8Ty/M3rtmTDM1aR5ubU4sTheWN+UpahNvjif92VjVll/h+Wsa68ncH3/Lv2/K1at5cQLZsjooSN9qsq/NWJeSPNIH3xhlX7uyuv2cJanj1JSo6lW6vprWSSFEVvm2vt/hrP+2PHy6MXX7m5/lp80iWcjJvVmk+b5j/FVKS8e0kV5kWTav8AqW+5/vVhyolVJT1HzTPclER9+35nXf8AdqnI3mQPeZYOrbdzL91qcuoTXUoRE3N/DGv8VZV5cOofzdw+f56JU/d906I1I815DJFdLpHf52/vK9bGkzbRshh3J/Dt+9/tVh+e8Vwuzcm7/wAd/vNW1prXJlXztpVU2p5bVxVo8ux1YWUZVToLHfCy7H3xSMq7W/8AHVrZtbyGzj+eTyW+ZW21z1jbvcSLbQ7ZFZ1+X+7UHjzxRbaLobfabzykunZIvk/iWsMPh5YutGCOvF42lgcLKozk/ih48v8AUGmsNHvNiwqzIqv823+9Wt+zr4q+1aXqUOqvCvk7fu/eZa4hYbaRWv7x/vK33U+aSsb4f+Jv+Ed0/wAQ2fnSb2fzYlr9KwtOOHoxjA/HsZiJ4qtKc/tHV/EXx9Db+IrqPTXba3+oaT5tv+7Ulx44m8TeGWtvtnmM1vsaFvu/drynVPG0OtSx6qjxujf6pf4VqnZ+NLzR4bh/tO9G+Zlb+H/ZrWMZfaMOXljY57xp4Zv9FYeHtZTat1un05l/u7qX4d3TzWM/h7UtrM25oPk+bdXD+LviXqWueKvO1C8kfy2/dbn+Vf8AZrW0XXNl9Hre/bL/AMtVV6qXJKRUecf4i0W50mR0kfO52b/d/wBmuD8QSI0zJ5fzf3q9c8ZW9nrUKarYP8zLuljryDxtDNb3pR/k/wB2lKMTSPwmZb/LcL91tz02aRFun+6GZ/u/xVHpt2i3A85MfP8AJUszJJqT+S+4bv7lTzcpfuiMybS7hs/w1XuIXjjbZ8zN83zVa+zlpFmR/vfc/wBmlmhdfnkfe1Vyi+EwbqPbJvd9x/u1HIu35CmK1NQs0jf59uG+7WfIzqv+7/eqYFRIFXHJpfu/OvVad96Ty+opu5P8mgYrSPu+Y4+amt/fBprM+Pubv9qlb5iv8NVylcrHFvMHNWLMIkZbOHbj/gNQrJtX7i0I5jk2P81Ll7kiyLtbzEf5qns5JGb+HctRzSIsfyfxfxLV7w/Z+dIsju2Vf5l/vVUdifsmzo2xpP38yt/Ftat7+0o7e12PxtTcrLXOeekcmyGH5P46g1rWkmtRDDNs2/L8tHwklHWNQ+2ah533Ru/75r9NP+DaXQ7O8/bi0HWL+FtlnazTpNv+638Py1+Xm52kXZ8y1+rf/BuDpM0P7R0GsI+1YbBtjK+3c27/ANBrbCx/f8pw5j7tA/ps0rUY7nSVuIZg4ZMqy1+f3/Bf/wCDFt+0D+wF498GtazTX1nYNqOmxr8376H5lavtLQdcubfSVe5h2Lt/4DXjn7S2oaJ4i8M3+n6rbRyi4sJoNsn3W3Ltr0qmH5YTPGp1nTqxkfzX/wDBPv4n3kHgCXw3NcyRSw/Kit91dv3q+ktH1K51Ngkj7/L+Xc33l3V8d6v4d1/9lT9srxj8Fp4dkcetyPZxzL96GRtysrf8Cr2/S/FXjCdg3k4Vvm3K/wB2vx7PsCqWMk4R1kft2S5l7TARS6HfeNNak0zfZujJu+42/wC9XhXjbxRcx3E1mkyxJI26WT+Jq0/GnjzxI0MiXj/vY22xSK+5VrxzxLqGt6g0syOz+Zub79cVDD1Yx946cViox94s+ItbtrxWm+VnV/mZX27lrndS162jzsh3rJ8v36y9RuL/AHohfbu+8u+sxVubpmKI277rV6tHD80uaZ81iMZJz9021v3Wbe83+8rVds9STyx8mxVf5KwbGzv2X7M77trf3a6G10dGZY4UZn2Y27a3kocpz/WJS903YdchvIxa22mqzL8ryb/vVj6tY/Z5C8w3bl/hqy1reWeLZNysvzNI33aZrEn2O1KXM0Zdk+Zt9cs4xpStE29pzRMZm8tVdEb+9tZ6RtQS6xvTG35dtV7rUPPt1SF1A37fmqD7VCqsic/JWnLOpH3jmlU+yTSXO3cnzbPvJTdztN58O5k/u021WSSFvvbtv3WpGZI38nzMj+6v3anlZjzc0TX0q8JBSSFt38Tf3q05LzdGX3rtbb8q1gRq8Mfkw8NsrVtWS4ZH+78n3tny1zVKMPiiXGpP4TQ0mxSa6CIjGvafgT8J9S8W30cMNg2/cv8AD83/AAFq88+Hfgn/AISDVIk/56fd+f8Air3rUPi5pvwv8NJ8MfBu1NSuLX/ibXnm7mt1X+Ff9qvncbOpKfJT3Pey3Dyl70j0bxJ8WtB+F+kxeAPD1ztu9ipcXi/eVv4trVW8L+JLHxFY/wBlQwyR7YGSWNpdzKv97/vmvljxR8SPM8RS3szsfn+9u+61ei/AXxlbah4sT7ZeMqyIq+dD83y/7VdFDK6dGMZH1uHx8f4VI4b9qT9hfVdHjPxF8APNdabfNvWOT/WK38W3/Zr50tfDnimPVF0SFrpWkfbtjf5lav3Q/Zd+Cfhv4xSN4e1J7O5s5NNkb7L9nZpF2/8ALT/ZrmfG3/BG/wCCGh/Gq0+LV/4kXR7O1ZZ5dH2My3TL8zfN/CtfZ4bGYf6rH2j2Pl8VlmK+uSdHm5T8aP7H8ZeCvEU3h7Xtakja3+ae3uH/AHke6vob9kD9r7w9+zA1/r2t63eXiyRfuNNtW/1k38P+7XOf8FbPCNn4F/4KF+OrPTbSOCzvILG6sFh27fLa3Vd3/jtfPVncTRtsRF+X+JvvV6VTJsHj6UZT6nhQzrHZZiZcnxRPRPjn+0H4/wDjJ+0TJ8ffHlypmvtsEUcLNttbeP8A1cdfdXwP8Qv4q8A6Zr03lyzLEsXzf7vytX5z/wBnprmi3Wkv8zsu5Pk/ir7c/wCCefie28YfCtLCbafsq/Pu+9u+61ep9VjToRhD4YnmU8bXxGMlUqvmlI97+xwxI6Im8xtulb+7SWtvcsq7XbLfLt/2au/Y5biSJ4XVGjfY235V20q2t3CyJc3imVW3/wCzV0aMT0JVJhDZ3MMhfqvyq+6tJdNf7Ozz7Qdn+rVfvUSQzTQq9y6p/st/Cv8AwGr0apCsX2l5JfMbZtVPl+9XoRp/DE2oVoop2dncttcTR4VNqbU+Zf8Ae/vVLJbOyvD8z7l3bmT7tbOn6PYLIJrNJA7Ozyr/AHamm095oXSH7+791/u0/ZxjM9jDylzcxx+r6SnlmZLbcvlfJXJ3djNCu+HzJUj/ALy7ttei65psMkbTIiq3yqkO9vlb+L5a5bUrU25ZIpo2XYrNIqfxf3f96so0+WV2exH3onF39iJlR/sf75k+Vv8AZq3Cgi0J0I4EL8Z+tbdxpttcMl5NbNv2MyfJ92s+5hit7eSJ8lQh3ce3NfrPg6n/AGxjv+wap/6VA9TKafLWn/hf6HhXx8864+H95pNvcxq940aRbXbcy7vmWsP9nn9iSfUJrTxP4qkjtLPazr9ob5v+BU79pD4oaT4B17RtNeGNyzSTuqp83y/d3Vwt9+29r+rSQeG9NvPJt40VIo93y1+RU5TpxPyLOoyqY6UeY+zm8U+A/hzocWieEobWJ412+ZH/AOzV458bv2gNSjsbjTbaSMBvuSRv/rP9pq4q1+IQk0NNVvNY3Oy/dkl+b/gNeF/Gz4xPfM0drNnd8u3+6tTKU5Hl06cYHM/FjxxeaxqUjvfs3zV5pdaghmb99z/H89R61r1zfXUrvMxO2sxLhNob/vqlGJ08vuFuS6eRm2PgP/E1FvI6gd9tV1b5V2fxVatLZ5Gx/wABar+ySW1kQqrn5m2/99U7a8ap8m41Yt9PeGPyf4lqOZUjYohZT/tfdanLYrm7CKvkr5z8t/s1D9q3RqPvf32qTzP3bfdVmWoYVmmk2TTLto/vEe9KBoWrPMR/Cu/+Kr1qu2M+duB3fJVKzk/d4Sf5v92ryvuj8z+Jf71EthfaL1rskjCZ3VqQxwx4SZF3/wB6sLT7pGZ5P/HW/irZs5hIq+Tt+b/bqJf3Q5jet1SbTXR0yVX5FWuFuL6aOaVJnUlX+7/drrYbx7LdC6NsZa4TxRNNa61LC6bQzfJVe5yExly+6dR4T1ZLeRHTd8zfOtey2d5Mvh2F0+f5Pl3fw18+eH9UeGZN6bm3V7Z4buPtHhuN0f8A2k3VRE+bm5kYnxSvJv7FmR0bKru+Zq+e9ZkdtQdtn8Ve6/Fq8f8AseTCbvn+6teCXs264ft81LlRvT3Ok8Et/pip/DuWvd/DbvqGisg6bPusn3q8C8Gs8c4fzPlr6G+HLPcaLEnzKuz/AL6olsTI8a+N3hN7O4S/httqN/FR+z34lXw94si87lJv3TR16l8YPCsOqWL232bYqpvVq8E0ye58N+I1m+60cu7a1HwwJjLmjyn1pqFnCrM6IvzfdaOuS1yx8uRf3W/crN975a6Pw3qn/CQ+H7TUofnZol+61VtSsdzF3T5Wb5KI8pnLmvyntf7Bs0v9jeJLUnEa3Vs6JnO0lZAf/Qa/oz/Zy+Glh8VP+Cffw+bQfIOsRfDy2g067IwUlFuB5bMOdu9a/nN/YSSaPTvEsc0SqRNacr3+WWv2P/4IZft32euaXqX7LvjHWD52ialcLpIlkXCxeYx2LX7XxLVqUvCHJJw/5+VP/Sqhyxp0qladOps0dD/wSS/bYXx/8RPEHwu8cQw2GvabqU2k6tZru+W4hkZflr51/Zu0LSvEv/BXi58M65ZJPZX/AMQfEttd28vKvG6Xysp+oJqT4paEf2CP+C0Gs+IfGem6hbeDPiVq0epadfabEqotxJ95fm+X733qxv2d/Fh0z/gqefGlphQnj/XLpQ3PykXbYP4Gujw/hF5bnNWP2sNL/wBJmfVcBVWsuzOjU2hTl91pf5H5W/8ABaz/AIJz65+wH+294m+GttpzJ4c1mRtV8H3Cr8klrI27y9396Nvlr41+z3OnybJk3N937v3a/qz/AOC+n7CHhT/goj+w3f8AxZ+HtvFc+Mvh/ZSappDQL+8mhVd00H/fO5q/lv1a18lnhv4eGbbu/iVq/Gq8VUiqq6/F6nymDrulP2Utvs+aPpn/AIJkXjT+ONbjJzjRCc/9to64r9v+xa6/aM1zcoJFpZtF6/8AHuldd/wTEtltviRrscS/INAwD/22jql+3vo89v8AG67161wwltbeOZW6cRLX65jnzeB2F/7Cn+VQ1fL9bfofMnhnVJvDfiCJHb5Gb+9X1D8O9YtdZ0XZ9syzRfdX7tfNPjLQUs5BfwptGzcn92vSP2e/GiMwsLl4x/CjNX4rKMoy5jq5Y1D1DVLFFV33so/vfxV7v+zP4y/4SDS/7HvLlvtdr8qKv3mrxbVLdJUf+JP4mjrQ+EXi7/hC/GVvfzXrQ20cv73/AK51GIp+0pamuDrSoVY2PsS102a3XftVU3/3v/Hmq5DY7vKS9uYWWT+KP5W21f8ADa2eqaXDeWj+Yl0iurf71X5rF/tT+dDH8qtsZv4a8aP2on2kOWMIyMZrENNNcpzM3yptf/2Wlt9LmaT99bK7SfM+35fL/u1t2FvcrIm+2/dN/rW+Xczf7NTx6f5fm/Zn2su7czJuX/erqpx5SpRhL3kc/JpPmMqeSobYu/c/zLVG80G4RmdE2ur7naNPu11dxp6Md8aKPM+bc33WX/ZqrcWaLMszoxMbfJteteXrEv2fNvscNr2jw27bLYfe+bbXI6tZ201w/nOqlf7tejeIo/LV0tvur8/+7urg9cX+C5SPfv3Sqv3mrhxETqwtNxlpsZUy7NronzL8v+ztre8GmX/ShNFtYMoxtxxzisGSTbb7LN2WNW+9I3zLW14DkaRLrc+4goC2c5ODX33grGS8TMFftV/9NTPpsqjJYuLfn+RS1S8c6jcxoR8s5VAG6tUFveOqyzPN95tyeW3zLt/vVU8Q3ccetXLLF0uWUr75+9UcdxZxr5c0yp8zN8v3q/KuK1y8QY3/AK+1P/S2U5fvZerOh02+hiZH87ezfNu+6tbFhqSNMyQzbiv3F+7trjdJuIfOl3uu2P5f9qtWO8SO3i2fON7eUv8AEtfOxpxK5jpYby5W2U20OxtzM8jNtVqtrdItqsPks0n3du/+GuSW8fbsSZYxu+dZP4f92rENwkimeZGRV/h3blZa6KcvZil73wnVf2l9nWSN3b5W3LHH/wAs6hkuobi4dPO3DZuij8r7zbvm+asdbqFYVENmv7z5vvfeqaPU3877NNHtdX2p8v3lrshU6nPF+9yl9FhXek3mMPvJt+9S3kiTSIXmYbdvzVUW88xt6chfuSf7NPhkhZBsf5t/9z7q11U+Y0jThLcbLb7b5vMg+Zf+Wn8NUZrW/uJnxwW/2/vf7VaS+TcKfOkk27vkaR6j8l3lH2l8n5vmZq29pFnTTp8xktb7Wi+8LdWZXb73zVFbr5kcT3KSebH99vvVqzW8NsoSFNir8yKq/KtUJp0j+/OqM0vzt/e/2axliPsm3seWXNIfDHCqq8kflq1XNP1JGmTEysFf5V+7urMmvIWxvnVEj+9tbatQ2+rWCs298v8AfXd93bUU6nvcxliKfNEsaTH5jeTI6lvN3I38P/Aq6rT/ADiv2nYp8v5XXbXI6DdWrXw/cq0K/cZfl/3a6XTZJobYpvyixfJ/e3bq9mOFPksHjuV6m5NFcrG6Q2ak7l/75qK4Xy13xbWG/b5bfw1HHcJDGv77D/3ldvvUbnkZYftKn5NzbazlThy6H2WBx0YxKGsWrzWjJ5LM7fN+7f7tZGpaXDcRt/rFaNPkVfm3N/eZq37eHbuM8Mm6Rvnkb7tI+jp5jPDNx/47XLUpxie9RzCR59qGjzMuy/SMp/C1c3rWhwtG++Ndm/7rfLXoN9o8y3CvcopRXb5VT5WrN1bS0+z7Hhyu/wCbd91q4akYfaOx4zqeLa1oNzDOERF2/wC0n8NYOpaO7SeZbJIyf7ler+INHhZm+9tX/VN/E1cxqGivIj+SmI9u5P7y1zU6kPhPMzHEe2gedSabud5pkYFf71VPsfnTL53Cbv4a7XUvDcLRiRPut99Wesq60eaMb4YVO37td1PFRUeU+MlhZyqmE1uI22Q7VZfv1cs7mSOLe8Pytt3r/wCzVNLZ/ff5Vaoo7d1Xe6ct9/8Au1MsR7h7mW5Tyy5mfQ3w/d5PgbE6Mdx0y52nvnMledaHs+0IsKyMjJub/er0T4flk+BUXmDaV0u5BAPTBkrzfR7xIrgyfN8ybfv1+0+Mkr5Bw5/2CQ/9Jpn1uCwUa3MpLbQ6KzaS33TO7B/9n5q6PTNSfcJndnXZtdWX7tcYt0I4xv8A3Urffb+6tbGjXU0ca2c028Q/fb/er8HlsXiMvhGB2NvfQtZpcwuxaR2/dt96pZL5/MPnWys/ytBGv93/AOKrI0/UHZoVe5kxJFslkjf/AFa1ejuJoZEuXT5N7bv7zf3aujKcZe8fMYzC+zEupHYB3fcW+bb/ALNZ1zFCv+kpM0L793y/Nuq9cMFk/fP8qxfKzVnMYbiNLkeZiNWr0cPKEY8x8Zjo+8Z+qIkyvCk251bc6/3t1ZO65t4fJRIy8j7fmrXuLX7RcCaZ1Yfdba+1qpLazeQ/nPtlX7qsu6meVGN5cqKK/u5ilu+197DdH826qV1C/mbEePYrfvVVdzf7taFv9pdvO+b938y+X/FUN5Cl1I6IjIfveYv97+61ZVJcp10/eM+GNIGCXMLSIr/Ku75V3VrW7Iy7O2//AHaoNC8mwb2Dq/yzNV6z/wBVvmdVZV3O2371cU/fnyx0OyjPkgbenWd75rzJu+Vfn2/dX5vlavL/AIja1f8AiLXDc3kzOti7LBD95P8Aer1TVtesPDPw9ub+5eNb24XZEq/ejX+9Xh9xq25pnfa7N/rf71fVZTlqwseefxHw+e5tPG1/ZQ+CJLca1Dx9mflV+f8AhauB8QaxNayav5N/+8ktWb5k21sXGsQ/an875dv3WkXburjvE+oPJcSOU37lZNu3+Gva5keDGXMc74X8TyX2mvZu+3y33LVbxJr01vZvDC+3cm165LQ9S+y63cWzuqrv+bb/AA1Z1nVHm3Ojtt+7U/Ea8v2jntSkK3hmL7h/drQ0fxE9rsff9779Y+rXEzMfT/x6q0Nw8Mmz7o/vVXvDPSl8bTTWqIk/8G3atcR4q1Z7i6Z3m37XrO+3urDfM33/AOGq11cb2MzPv+ep+yVFdSezkjmmCdBVv54p2fft3N93+9Wfp94isf3K/e/iq5DcJNcStvXf91F/hWqiEi6sPnAp8zL97cvy/NTrhvOJR0bd92ls5t3yI2P4an2/aF8nDfN92iRJlX0ICj5GO37tULyPZIX2bS3/AHzWpJI8LOm//gNUbqNt29ujfw0cvuDiUWjEY3r/AHf/AB6omVBtf+7Usy7JsO7fLTX+6amBYxsK3+9TY1SRfmFO2p5fzPxtoVkA/eL92q/wmhLbxou6SnyRoyq+aiWfbJj+KpFkRmbZ8q/wU/hMyGRvmCfMK19PuPslq+yT52X71ZTHkO/PzVJJIVX5Pl20vhAueXMq+cz7T/HuqrcR/vPv7v8AdomumkkV3fK1Esg3BE+7Rze+KI61jMjq7v8A71fr1/wbr6GF+Ik9/Mv+rtY1Vt/3vmr8hbFWkulR143V+y3/AAbo2MMnifU0eNUElvCu6Rvut/Cq11YL+KeZm3N7DQ/d+G+vG8M9Wc+Uvy79zbq8H/aCh1K40+5hEMgDJt2s3/jtetabrW3R4ZvtKv8ALt+X+KvOvihrFtNG6Xm5EZGXaqfM1etWlGUbHz655H4Uf8F0PgjeeD/HnhX9pnRIdzLL/ZustGm3y/8AnnIzf+O14z8P/ipqWuaFDZ2t+vmbdz+X8tfp3/wUi+Fvhv4+fA/xX8N0hWaa4sJGsNy/NHNGu6P/AMeWvxh+B/iCbQbiXwxrULQ3lncNBP5n3lZflZa+Dz7CxrR5o/ZP0HhvHyivZSkeo+Ntems7x7OZFdmRX/2f/wBquI1rxEn2fZD8rf8AoNdL4sv5ri1d0jVw38X8S1wGqSbpN77lG7+Kvmox93lkfS4itzakEl0j/vl/4EzVWs7qbzC7u2yopo2bckKfNv8Am3PSSXDxxhNn3U+fbW0Y3PHqS5joNL1az8z/AFKsN/ztXT6fq0PmK8KcbNu6vNPOdWZ0f5fvfera0G+nuF8n7SxH91WqpU5Sjy9DOMonS+JvGlhHCkKQ7m+5uX5mZq5TVr57pdjou+P77Vt3Glww/wCu8sbvubfvVlappVsvHkbhJ8qbayjGJpUqS+Ex1keNvs2PmX5qmhyyqMr5rf3qmaxKqnyfN/ufepjW8xXfNt++yuq1fuSMSb5Gz2Zflp8MTsfLSLPz/wAX3ahjjdJmdPu7P4f4astJbSMqu7Db8yMrferP/CVH3S3Zw/vGz/F8tdHpOhvcXUNnHD5u75vl/irDs1e4/wBG2Km5Fauz8LskNiPJttr7/vbvu1wYyc40rxOnD8kp+8dVJqln4B8Oslncr9rZFVdq/NG1cHrXiSaxie5v5mNzM7PLM332b/4mtLxE2pahJ5yWy7Y1+9/eavK/iL4uTQ9Sks9Sm33iou23j+7H/vVz5Xl1Ss/5mz0q2KlGPLD4S5Lr1zcTPc314w3P/DXf/D7xF4k8MtBqulWczN95dybVZa+en13VdVvA8shyW/dKteqeBNd+Jul6cdSe+kks44NryXS/u41/3q+ixeXVI0uWJhTxWIpS5oM+w/gd/wAFfPGf7H3iKy1RfhbFqDRov+kQX/ltt/iXb/EtfYPgf/gv/wDsX/tDwPZfGfwvdeD7hYFi3TKTHNub5tzCvxK8UeNptc1BpjMs25PvL93/AIDWV9smuG+fbtb+7So8NwrYflm3GR6dPjKrhf4kFNn0X/wVd+Onwo/aG/bq8Q/EL4Faw174Yh0uzsLC6aLarNHH823+8tfPI3huZNy1FGr7lfzF/wCA1Lbwo0jpvbb96vrcNRVChCn/ACnxGKxEsZip1nG3MzqfA+oPa3SoNvzJ/F/DX2D/AME69DfT18R6U9s0aRtut/n+VfM+6y18XaLdQ299E7plPl+Va/RH9h/w2lj4FufEKJGEvoo03bPvbf4d1dfN7vKclH+PE9ks7P7Ooebc6L/Ft3Nuqe3t7OOTf5y7Puouz5v96rl1aw2Nos1m8m1U+dlp8ln9om85HbKpu2/w7qdOPunr8w/TdJTzXQ3KqjfNEq/erRtYUkuG2o22NP4k+bbUelf6tUR+WTa+162NO094pt7ou77sSt/FXXTjbQ2oykP0ezhjtVdEZ0k+bzF/i/2qufYZrhWeZ13Mu3y4027f+BVdsVSSNXZNn/TPZUqKiqs3zJu+5Ry8vvHu4eUzmdY0XaoeFGx8v75vux1yGoabCyzpvxGzs+7Z95q9D1RfMt/9Yynd80a/d/2WrjvEFrjMPy7vv7m/iaspS6nvYVc0oxOaax3bfs0TKNi/L/eWsHXrdYtTnt4yFGQAc9MgV1Fn9p85POf5W/8AHa5vxYEXWbkwtuXAKk9/kFfqfg3K+a49f9Q1T/0qB9JhMP7Jyfkz83/2zvH02tfHTWNKhvWa30eKOziXZ/F95q8z+Gun3OueKLazQbjNKqqzfdq1+0Brb6p8fPF04fcs2syfN/u/LTvAMkOi2dzr1y+Ps8X7pf70lfkPwn4bjeaWKn/iOu+MXjz7DeTaPpV5ugt08r92/wAu5a8f1zXJtQkMzuzNTvEWuPqF89y82fM+ashm8xi+/NL4viMOUb5j+WXfrUkK+Yi92/u0kcLyJn73+ytaulaO9ww2Qtmr+IciGx07ciuXZt1bWn6SzSb0Tcu2tzRfB7rD5zwbl/2q1W01NNVvMRc/3a15eWPKY/FLmOcuLN7VS4RtzVmzruk3gfdrX1q6RlZ4Wwyp92sCaWaSRn3rtrKUiox5iG4mkZhsRm/2mpbNXVmR0/2makaT92u8MWp0Nu7HY7712bqPhH9g09PX7SypvVVX+8lbDafM1rvh+Yt9+sXT7jbPs8v5P42rpLOS2EOzftDVXMTLYzPsc0LDzE2urf8AfVaeks63I+78r/OtLdJDx5PPz7X+f7tNjkh3L5Pyms4+8HLHqei6Xoej6tp6bJtpVNvy14/8YNPfR/Ewtndl+X/erudHuHjtmSzdlZdyv8+5WrhfjJNcTX1tNO6lvK2s1IcY++Zfhi58y62TP/Hur3jwTNu8PiPzFYLt+WvnTQbt4boP8pr3X4bXf2rw7M/zDyU3Oy/eq/hCXPsY/wAWtQdtLebqjbv+AtXicm+SYu235q9M+MmpbbYW3n8Nu+X+9XmKcMKZdOPLG50Xg9Q1xGm/Zu+81fQ3wzkeTR1hhTPyfNtr5/8AB8byTRun3d/8VfQ3w3t4Y9PfaPk8r5f9qjm+yYy+Mf4wvIZIz8kgMa7NrfxV4d8QvDL3DS6lbWzZVq9j8TR3OoTM9ykg+fbuaslvCr3y/Zns2f8AiWTZTjyGXvc/MWP2cdck1Dw7LpT3i+Zb7WWNv7td1qVhuje5R8n+JVT7teT+BY38A/E6G3mdhDePt8xvuq1eztcuF2b/AOPb838S1Pw+6aS5Ze8ep/sSwywW/iZXl3KZrQp7fLLxVT4X/tKeL/2Z/wBqnVfHnhm8ljFv4hmaeKNv9bH5p3LWt+xzapbJ4meOYMJLm3baP4OJPlrxj4vgp8YvEUpkwx1mcYP93ea/aOJkv+IN5Kv+nlT/ANKqHDDm9vI/oq8afD74W/8ABZf9hDSvEXhnVhF4m0y1+1aDqqsvmQ3ar91tv3dzLtr8/P2aNW1zwB+1rZ3vj7TrifVLK71WDWLeGLMhuTa3MUuF9Q7E49q80/4IH/8ABTC5/ZL/AGiYvgJ8SdY2eEPEk+2CaaX/AI85m/8AZa96+HGNd/4KZ6jNpl2TBcfEHXJWlgj8wvb77pn2juTHux9RUeFNWdTKs4ozfurDyt6NSPtOFqUaeBzSsvidGX4KVmfcn/BPr4z2HinxBefDfxBdE22u6cYfsrtuVm2sv8X+zX8zH7UXw70TRf2jPif4M0dFa20Hx/qlratH93y1uG2qtfvx49h1T9jb44WXxavrdbDQZory98OtM/7xLVYW27v9qv56de8ZXniT4yeJ/EOpXLSN4g1y8vJWZNvzSTM3/s1flmNjLD1H/LI+Cy+pCtTjzfFG56f/AME1bO5sPipr9tJjYNBbaSuD/r4q6L9sXRIdX8Y62hhYyiG2MbKM/wDLJaq/sCWhtfi7rpOfm0E8s2T/AK+Kt/8AaHla5+MGp6YzrseGAYbt+5Wv1nG/8mPwv/YU/wAqh0yl+/b8j5LmtodW06awuUZXj3LuauY8GapL4T8VGGZ8bZfl3V3HjDT30HxhP8i+XcPtRV/u/wB2uF+IGlfYNQXV7ZPk3/O392vxeXve6dlGUubmPp3w7ep4g8PR3jvhW2/Kv/oVVNQheO4kmh/hX+H+7XD/AAF8YPqGlrYPNv8A9lm2/LXfaxE9quxE3tt+8r1HN7tgqR5Zcx9Zfsb/ABSfxl4Jbw9eXO6fTX2eX95mj2/LXsPluxdPL+Zvu+dXxB+y/wCPH+HvxSs7y8m8uyuv3V02/wC7u+7ur7qlKXE3mJNHLbyIv7yNflk/u1w1o8srH1WU1vaUOWQ7S4Zm80ImV2VPbJeMpMKfMvy/7y1ZsYYVj2bNif3d9WLXTUjXfCjK+/am2iK5j1PaS92JnXdrDJhJLXarfxM+1V21QvLV1kkSa23ity+t3l2o6K4VvkXb92q11Z/u33zttb5vMrojT6oqNWXNyxOG8RLZxyfacNmRfvLXnPiK6htbgw2yMXb5kaSvSfE0CKyPCkgSFG2RyL8u7/erzPWrGaEn/Vum9tvzfNu/3q4sRGHKephfeOcnWa3uNkL7xu+eRf8A0Gum+G0iML5Yx8u9GB9c7v8ACuUure23TI9zMiKu6VVf/wBmrf8Ag87GG/jJyFaIqc5yCGr7nwXa/wCIm4JLtV/9NTPfyqP+0xl6/kZfiWbbrl7HK7H/AEhiMduazobwrMwhf52T+JN26ovGN3cL4nvoowNpu3ViW461jyakJpvO+bbGzKrL8qtX5lxPHmz/AB3/AF9qf+ls5qvu15erNuORI9QzvX5tzfLVyPWIfM2JJIzL8yfw/wC61chca48K/uXwyttT5vvUN4mgaHY8qpNs/h+bbXgxp8xh7Q7NtY2qJppv3rbt6/e+b+KrNj4iRnb9yymOL91Mz7V215/N4gFxGib/AN60Xz+X8u6mf8JFNDt+dn3fKnz7qJU5S0COK5NT0218STblT5UWPdvb+9/u1Ja6tNIzu9yu1vk3L8zbq81t/FkLKttM/wD9jWp/wk7283yJGw3bf3b/AHmrf2cuoU8RCUz0nT9Wha4EKOzpGm3+7tX+9VzT9YSS3k8l2Ks33d9eZ2/ix4ZXMG4rt3ff/wDHWrQ0vxM/meek23b8zK33ttZ806Z3UK0JTuekfbHmjVN//LL5lb+GrEkltfWfmQux3fd2/wB2uJsfE9t9ohd7zajL821tzNV+38WJbyLsfYnlfeb5W20qeI5XoejTj7xuXnzSI+zcv3fvVk6lNbSTR2LTK7fNt+Xbt/2t1Yt94geQM9lMq7n+Ztm6sW+8aeavyTN+7fa6/drKpU97midsY81K5ratrXmQtbIG+VPn3Rfe/wCBVlRa55wi8mZmTZtRW/hrB1TxVNc7kR1Z1T/V79u3c1ZU3ibbEUNzsRfmRv8Aarpw9Y8vFU+U9M8O6pbbYrZHUv8Ae/3q7DR9W+7C8yoGX5mX5vmryXwzr0LN8833f4f7tdrpuqboWRHX5m3V9nKn7vMfklPFTjI6231Sbz2SaaRfn/e+Yvy7f71aSTJcSRBPu/e2x/LurlrS83eZs8xl+6jTVrWt15kavM7Yjbcu37q1jKjGWx7mDzCrE342+0XT3PneaGi2su/7tTeWkjOiOu3725U/8dqto86Ru8z2ysv3X3fdZams45pLhb+Ha6L91furt/irzqlO1z6fD5lLlTKF9awy3Hzv/D8rfdrF1C1s5ISly7EN/E1buofvl37F279qN93bWXcKkcyzP8z/ADLt3V4mIjyyPYp4z91c43WtP2Mu92f+4uysebR1uFWbZsGza7L91q6y+jRpFs03D97ubdUH2G2TciPu3M3zL/FXn1JcoU63tjg9U0F5GaZ/3S/elZvmXdWLfaLtgZ9mG+7tWu+1O3mjjeF03KqfKrL95t33qxdW0ubzC8yKFhT/AFap93dR7T3Tow9OMp3OH1TR0t5Mum1fl+WqbaS5Zk2SJ+9+7t3V2OoaeJGXz02fw7f4lrOmsU3b33fN8yNRzS5OU+xy+nCMT07wTbfZ/g0tsw6afcjBP+1JXmmm6fM0e/ycsr7VVm2/NXqnhWHb8LVh8sD/AEKcbR9XrgdG0/zPkhfHz/Osj/dr948ZZcuQ8N/9gkP/AEmmejlKjz1v8X+Y3T7GaVk851cqu35vu1o6bbzRscOxDfKm77tWIdNMcEcMNtt/i3f/ABVWlsfOzYPM2N+1vL+9/wABr8EjU5TfGU/c5mSaWzyQqVRUDJt2yferRVXjs1R3VV3qz7m/h3feqvp+l7Wb/WMPuurLV6GFJDsRI2+7t3fd2/71dXtGfDZhLlG3Vim24mmnzt+baq1R8x1VHhh3+Z8m5V2/8Cati6bzGbZHJKrJtb/Zb+7WZfLM3zzOzKu1fLZtrbq7aM48tuU+JzD4uaJl3W+a8e2Ta5V/3W19rVn/ALmSR5vmDx/MjK3zSNWrJCjMkybWLPt27Pu/8Cqmtv5l0yJCyMz7VZv7taSlzQ908fl+0MZXt5vtk07R+XtX5V/1n+9UV5HbXUY3+ZFt+8rfdZq0ZrRGhXy9u/ft3bGakWxm8vZ8ruvzfu12+WtcNSTlqjro0zHa1RZkSF2H+z/Cv/Aas6LYPdagltNM0sXm7pd38S1alt4W3u/mJ8/3m+81P8A2r+MtW1+wsJlf+ybJnn2t91v7q/7Vd+W4f22J16Hl5xiPquG5Y/aPOfid44e81SfSrPaI7d2VV2feb/ZrgdLvB5k1s8y+Yz/dan+KLpLfxNf23zEtu+VvlZa5KPUraHWvs1zuUbN26vs4x9nG58DzTlPmZU8Xao9rM+98fPt3N/D/ALtY2oap/aWn79/zbdu5Xql481aO81BpERm3bvmrmrfUJrXd3T7v3vu1EZfZOj4jl/E8n9n+IpJId21vvL/tU2TUppoT2/2dlM8YNuvldI+W+Zv9mqlrcbY97vurWOxXMNuJMzP/AAlX2tVa4mhY7HT7tLcSOzM4f/Z+aqsr7lFL7Q4j5JnEe9Pu/wB6o5Wdfn/ipIW+Y8fL/dpxUbd79f71Ei/hFs5N0y1d0tHlmkjT+9urPs5Ns/P96r+jzeXeGZd33/m20v7opGpDHtkK9NvzVZjkfOUm27m+X+9UM0YwNnP+1Sx3XlxmBP4fv0pcsTP4hLyFJG3pu+X+L+JqpTyeaV/ib+7sq150zfPs+RU+838VQSKh3eT95qAM+4jT5nwuWqm0bj+PdWj5O5m39F/iqrNG+3eiUR900K6HaPu/8BoLbWb5P+A0/wDiaPf/ALtRSfe3ZzTjIBwERG807zHHyJwP7tRxkg5xkU5sKcZpAO3Sffcf8CoaTzDv3/71RMH6sKVW+UjtQBatI5bmeO1QBjO4RGJ7k4FfaXw1/wCCDX7a3xg8Ka94u+GsGjaxp3ha0F3r13Ym4ZLWP8YgZGxltiAttVmxtUkfGehyb9YskZP+XuP5v+BCv66/+CXf7HHxG8I/se+PrjV/Emgv/wALb8NhdBFjqBuFtAbe6hBneNSoOZlJVC5XDA4YFR9jklPhrD8OYzH5mlKpCpQhTi5Simpyl7T4Wm3GCcuyt12cz9q6sYx21v8Aofzy/s9f8EJv2tP2kPivp3wp+F3i3wndapfszkyXNzHDbxKMvNK/k/KijqcEnICgsQD+hf7M/wCyR8av+CK/xTfwJ+0uLLVRqNnHdWN94TuWuLa8iB2lo2nWJhhgVKsqsMZxggnvPEP7MP7Tf7Hn7Yfhr4R+AfHWlf8ACeXNzbHw9qXh7WU275/kVJBKFMeclWSVQHU8B1YZwP277b9pnSv2jdV8O/tZeNY9e8V6fBDE17a3EbWxtyu+IwpGiLEhDbtmxDliSoJOf3LBeGPBuYcUYaWAr05YKpQdRQ55+2k+ZJTjrbkV0nfW91ZvWPkV26tBxqJ3Tt5f8OfSdv8A8FYfgxDYx2Y+HnilNhydi2/P/kWuJ+In/BRb4a+Mdy6f4S8RQBgAWcQ54+khqP4Of8EWP2uPip4Mg8Z65deHvCSXkaS2en+ILuX7U8TKGV2SCOQRZBHyuQ4IIZRXh37TX7I/xy/ZI8WQ+FfjL4VFqt4JG0rVLSYTWmoIjbWaKQdxwSjBXUMpZRuGfUy3hPwXznNJZdgsTGpXjf3Y1m27b8vSVuvK3bqcs8FOFPmlFpGp4q/aF8J+I7meVdE1CNZHJXCoCM/Rq+BPjt+wZr/jH456p8TPhT4i0vTtM1ZxPcWWpNKJFuD99hsRhhvrX05SxxvLIsUalmYgKB3Ne/V8D/D6qrSoz/8ABkjTDV6mFmpU3qeS/Av/AII2ftwftRPIvwc8N2eswQyGG51JWkhsoZAqsUa4lVYw+GU7N27BBxzS/tC/8EF/2+P2d9NbxF8WvB9jZaSpUyavaztd2kW5gqiSWBXWIlmCgORkkAZr9f8A9uz4z+J/+Ce37Lnww/Zf/ZvvX8Malq2lNe6/qdowN2Nqp5pDkZDyzyOxcYKiIKu1eBm/8Er/ANrf4g/tQ+JfFH7In7UniGbxnoniLw3cS2j61JvnXaQs0PmDDsGRy4JOUMQKkZr+eqnh3ldbJ6nFeHwEHlsJS9x1av1iVKE+SVRO/s09HJRa2W70v9DLM8RKaoyn73orX7dz8LJf+CeHxPdht8ZeH9oOdpef/wCN1ufC7/gkj+0r8cPH+n/DT4V3+j6trWpSFLSxt5JRnAyzMzRhURQCWZiFUAkkV9g/FXwXL8OPif4j+H0ySK2h65d2BEzAt+5maPkgDJ+XrgfQVneGvE3iLwbr1p4p8Ja7d6ZqdhOs1lqFhcNFNBIOjo6kFSPUGv2qfgF4d4nL3VwVKXNKN4OVSbjdq8XJJptbXSadtmeV/aWK5/ef4HFP/wAGq/8AwVPcH/infCPK4P8AxVkHP61R8Tf8GzH/AAU9+F3ha98b694Q8Oz2GlwNcXi6br0dzMsajLMsUeXfA5woJx2r6Qj/AG7P21J5Vhh/ad8dO7sAiJ4hnJYnoAA1faP7b3xj+KP7Lf8AwTz8L/Ab4g/EjVtY+I3xEtWfxJeanqMk9xbWjYe4iDFjtUBktsdGBkPXNfkGaeDeLyXNsvwVeOHqTxVXkUYfWOZQiuapPWpZRhHffVrQ7YY/nhKSurLy+XQ/Gj4Jf8Elf2qf2iPEraD8G/D0HiG7twgumshMIbYPnaZpWQRxA7WwXYZ2nHSvUPGv/BtV/wAFQfDemXHiOf4f6LdW8C7ja6XrkV1OB/sxRku59lBPtX6jf8EqLnXvEn7AHxL8D/s2a1Zab8Uo9UmlS4nRQ/7yGMWzbnJGCI50RiAqvkkdWaz+xr8Kf+Cv2kftGaJqPxq8XeIIPCdnen/hIh4i8SQXtvcW+07kjjWVyztgBXUDaSCTjOfL4h4K4Vwmb5lTw/1fDwwTt7PEVqqrVrQUrwSlFWne0LKTel+hrTxeIcIXu79UlZH4K+Of2Bviz8PbTV5vEGsaZb3GhxTtfafOs8U8bwhvMiZXjBVwVIw2MEYOK+f7r5rjZ/ef/vqv2f8A+C0Ou/D7xJ+038Wbz4d+Q1vHpUtvqUtsuEkvo7PZcEfMQSJAVYgLllbgnLN+L16rSMmw4bbt+Vq+a8UOFMh4ew2U4rLKEqP1qj7ScJycnFvldtddL28+x0YKvVrc6m78rsSSSQy4REVf4qZHDBJcb+nyfP8AL/47UCyQ2+1Eh3t91/nq1YW9zeTLGkLbm+7X5LGMTv8AiNfwrYzX2qJbJtb/AGWf5q9Hg0dtNsW2Ju+ba23+Ks7wB4PvLOFdVv7ZovtCMq/J91f4trV0nibXrPRdFfVbny38uLbFG3y/NXkYqt+95YRuejhcPzayNT9nzwC/xB+IiabebZrPT7W41G/h27ttvbwtIzf+O18YeINRuPGni3UPEz8ve38ku1U+6u75V/75r9MP+CTXwr8T/EjxB4/1vwT4ek1XWm8IXVrYWqqzfvJvl2rWh/wW6/YD+HH7N/w6+BfjPw/8N9P8L+KtWt7yy8U2emuqrcLDGrLI0f8Ae3My7q9XKcdQw9aVGXxM9rH5VVnTw/s/tHxH+yP+zxqPxe+IFnYP91pfkVk3LurY/bk+J/hnVviI/wAHPhRZW9poHhVFtb+4s5dy6pfKv72T/dVvurXtvhLw/afs4fsSeKv2gNURYNVmiXSvDTRsySNdXHy7o/8AdXc1fDtmXkgyzMXZ90srdWb+Jv8Aer38u5sTUlWnsvhDi7D4fJcJRwcP4so80v0QCN45Nny7Vq1DCi/cfb/F8tJGqL8n3y3+zUjRvu2Rpt/v7vu17R+cS2FaTj+L/eqS3O4+Xt+9/Fv+7UO6Ers8n5Vb7y1csLczQ5RFpykKPPEkST7LNH5Ltu+9X0B+zV+1V4w+BPjTwx9p17b4P1SdrfxHbzLuW13femX+7tr5+aNFmVs7i3y1r+Ire5vvh5Klna+dLb3Cskkf3lVvvU+Xmiac0r+6fr/4Z1nwr4ys01P4e63b6xYXn+qutPuFkWRdu7d96rjOlvMl46Mo+7t/9mr8XPDvjXX/AIa6na674Y8SalZ6la/8eraffNH5Pzfwqrba+0fgR/wVM0Sz+FM2m/G/SvtXibS0/wBAmtU2/wBoRt/z0/uyLV060afxHXCUJH2/p8KTTfJIpMjbXb7rKu371b+k5b7+5Qz/ALpVT5mrxD9l39pXwB+0locuseG7mSw1G3+a60e8lVZ1/wBpf7y17ZY6gjTJNc+Yjr8iR7a1jW9p8J6NGMpQN2zi81pbmG23/L87bvu06SJ45tiIv7x/n8z5VjqGxkmhjf8AiWT5tzP8qr/EtTFopv3yPlVT5l27t1axkerh+bl0KWpWsJkKPuCfd3L83zVyniSzSHfvmVvn+T+9Xa6hCgs3+X5GTdt/irifE1y821Nnmqv3I2+X/gVctapLofU5a+aRg6aqfaGRIVZ2bd8qferkvGsXl6/dQmU8Kg3rxgeWvNdx4bt3a4MKW22Vk/h+Zf8AvquR8axMfG9xEF2s0sfB7Eqtfq3g075zj/8AsGqf+lQPpsPOLlJeTPx++NENxafHjxLaAfN/bEykt/vVB4q1aHT9Ft9EQbWj+dv96us/aY8OyaX+1H4qgvDwNRa4DL/EteZeINQ+338k+zf89fkkfgPwnF/71Nf3inL+9lO+iGNGb2pY7V5GxXTeG/Cd5qEyeTbb/wC8uyqjHmOWU4xIPD+g/aGX5flr0nwn4JRYVuZoVC/w/wC1Wn4H+Hr2savdIr7vm+Zfu1Z8UeKLbw/F9jR18yNdqsy/drb4fdMeaVSXKiLVprCxt/J8lV/hdq5TXdcj2l3uWO7ms3WvFlzfM3nfxP8AeV/vVjXl49xGOxrPmmXy+5oQ6lePJcvM53bv7tVGmIXZTppvm2eXz0qPy3ib95Ux934iveFEkZk+5xtpbNvm8j73yfPTWj3b9n+7VixjHmK+/bt/8eqhRl9ks26zM5T7q1tadI7Qqj7cR/3f4qorbzXEf7lNm3+L+9V2FXhjGxKCZe8WWt5pmZ0RlLfe21DIs0JPkp82/b8tamm/MuX+bb/e/iqxHo6TSLCkjAs+6l/dJ/wlPSdSns22IWxXO/FWXz7aGb/prXZ3Hhm5tY2eHcR/47XE/En5bZEmVi6t/wB81HL7xpCWpxtmSlyAf71ez/C3VHXR7iz87/WRbvlrxWP7w5zXqPwzvoYdKldH/wCWXyrV83LEqsc58Vr0TaosL7fl+/XKWse+4WtLxhfPeaxJv+Yq+3dVXSLd7ifYlMfwxOy+H+nvNcfOmNu1v92vVLfxZpvhuNYXudu377R/NXnmhwzaRpiuIVYqn3lrO1bULm6lZ9/8X3t1RL+6ZfEeo3nxQ02YN8m59m7buqBvihc3H/Hgiwp/d2V5jDHeTTD52+Vfuqta1qHsVZJH5VN1Eeb4iuX3eUl+IHiK5kvLS/uXb9zLvVY/4a9v8JeIn17wpa6lsWVvKVWZVrwrUoX1axkTZtCruf5a6T4C+OvsdnP4Yv5stC/7j/ZWnEnl9w+yv2OZHe38ReZtz51sfkGB0krxn4yxBfit4jYwHadYnLEt1+c167+xTefbLfxIxfcVktMnGO0teSfFBHvPjD4mijAcprVx8p/3zX7TxNHm8HclX/Typ/6VUOBXjXkcT4g1DUvDuoWnifR0aO5t3X9591q/Wn/gklrU3i/9sf4Va94luN82riSW8kkPLyTadOWJ9yzfrX5ReJrF9Q02aF/m2xbkVf7tfb3wJ+PGqfsx+E/BPx50dz9o8NWel3I5xlSsUbj8Vdh+NYeGKSyrO7f9A0v/AEmZ97wk+bBZh/16f5SP1N/bF/Z21X4w/Anx38GoL+W48Z6TfNFoytulurq3b7sca/8APHa3/jtfzMfG/wAE+LPgr8bNS+HvjLTZrO/0nVJLWaGZNvzK22v6pviX40uv2gPgt4b/AGxP2d/GE9nJr2jLpeuzaay+aqyfd+b/AJZsrfxf7Vfjn/wXK/4JreIfCWpeF/Gfh1LfUvF2rJJJqmh6fO11eLGu399Lt3NuZmr4fmpY7KOaUo80du/mj8jo8+BzbkjGXLL7vI+cv2Dtk3xC1G8yC7+Hzlh0/wBdF09qT9ou7Ft8e9UYEsRBbfIP+uKV6N+x7+xN+1R8CfBa/G340/B7VvD3h/Vov7N06+1S1MH2i4YiXaqNhsbI3OSAOK+z/wBnP/ggzYfttaVbftReOv2g7Tw9o+sTNDbaZaaY010jW7GAl2JCAExkjnoa+8zKrCj4F4WUnp9af5VD6SnRnWxbhBa2PyC+Lnh/7dpf9pQ7t8Ls+7bXB6hp7+IND3+SzfuvnVkr+mzwZ/wbbf8ABN3whpEt/wDER/F/ijam+X7RqXkR/wC1+7jWqOp/8EYf+CFc6p4Mvvgr/Z0906+VcR+IbiOTc33drM3/ALLX4U84wSlqz1qWW42rH93HY/mO+FmsTeHfFSQyrgM2Pmr6JhP9pQwukOVuIN22P5q/fn4Of8G7/wDwRTl1GbxZ4b+EGp66ltcTQSrqniOaWDdH95tq7a6HUPBX/BFb9kS7m8Mah+z54K0+e0kVbO0bTWvLiX+795mqK2a4Kjyzb0kdOHyXMsZzU4QcpR8j+e/w/wCC/FuoTJN4b8PahcPHLtRrGzkkZf8AgKrX3f8As96X8VPH3w5017z4e+JP7Rtbf7PKraDcbpmX+Lbtr9Y779uH9lr4K+EtG1lfhfoXhuXWIWk0nw9a6NCmoeXu2qzxov7v/gVc18Lv+CvPhXXfGWseGtf8JQwJYzqbeaGRctH/AMBrircQ5fGav+R7+X8J57Ti5wht5o+KfC/7OP7RviqHzNK+Bvii4RbfdK0mjSL5n+7Xf+Ff+Cfv7WPiSFUh+COrWisyr5l48ce1f+BNX3Ha/wDBUT4Jy2rTCKYvGjHyU4b/AL5rjfit/wAFk/g74B0K6ns9JuJ7rZ/o0ef4v9qpjn+W8t0/wNZZHxDKfJ7K3zR4FD/wSg/a9mj8xNC0NE27vLutcXzWb/gK7azfEH/BKb9shLNifBWj3Kf88bXXo9y/7X+01Ubj/g4D16bR45H0LTneKWRZWjuPmb5v7tcR47/4OFfiJLpV1b+HNHs7WVp/3V1v3PGv+0rVhLiOlKN4wZ6EeG84pytOcIlTWv8Agmt+3RNbtbJ8AL+UrKyxbb23b/gX3q4DxV/wS4/bvsmd5/2YNZnC/cks7iF//Hd1TaT/AMHB3xe0fxn/AGjc30dzA1nJb+U27/WN92SqviH/AILu/tAeKrZdHsdcl0rdKrNfW8i7v8tWE88jKPvUpHpUcgx8Ze7Whb5ngnxY/Z6/aE+EvmH4nfAfxho0Sy48+88PTeWrfxfMqsu2sT4Nzw3K6pLBdRyATopC/eTG75W96+vvAX/BbD496bMLfVvFlprFsqq0qX0aybl/iVt3y1zX7W/xp+Gf7QEvh74m+D/hvoeg61eQ3KeIp9EsFgF6wMZiaQJwzKGk56/Ng9K/T/BLGUK/iZgoqNpWq/8ApqZ9Fgcpx+FqRqycZQW7Utb27Hxd48vZI/FOowLKwBvpDk/7xrmLrWtkeYXx/Duatfx5Pb3HizVpba4Yj7fNGy7v4hIQ35EA/jXG61JtZXR1+X+Fmr4HiaF+I8Zp/wAvan/pbPCxk25ya7siuvEm3akMLN/Cn+1VaTxVbJu/c43fxLWHq15tkOxGXd96suaSaWNdiZSP/b21xQw8JRPna2InE6qPxY+0+TNtbdt3N8u6nN4wn2o7pGqfdRv4mrjbSWZ2L/N+7+Vfn/hqyrzLMnnfxN825K1jh4bHH9cqyOwtdcS5jffc7d3zff3Vbj8RPHJE6bnWNv4f4a46NraFv3PmO/8Ae2fdq8rTMrPv+9/C38VRUpyidFPEc0Tq4/FTyMyCbf8Axbd23a1WrDxVM22Hev8At/3v++q4/hY96J977m6pLe4fcYXfYdy/eauGpRnL3j28LiPh7noGl+Lrlplttit/d8v5ttaK+ILmaNUvE8z+6u75t1ee2s1yrGazT5t+1GV/lrVtdUufLbfNw3y7d+7/AIDXBKPLM+lw8jpr7XJVWZMyQt5W92X+GsnUtYmmxG958u35P9qmRzSWrND8yxtt2bvvL/e3VBqEf7sbIdv9xWX71KXKej7SMYlGS6htpPOd8bn+bbUH9pJIy/O2Ff8A1bfxU7UkTbvhmbd8rfN92qMjeTIsJRsbPn8v+Gt6MeaR4OMxHLzHXaHq0yyN53l4ZNz7f4t1dr4f1SaNVd3V/mX7r/NtrxrSdcms45PORj/stXa+Hdc3Wqs7shZPm/2f7tfcU5e6fj8j1vR9aE0gfylXy2+7I/zf7tbWj300zb0uWi85vu/e2steb6DrUCx+TD0bbvb7vzf3q7DQdVdS77Iy/m/d/vNRKUEdOHrS2kdtY3H2NUTezvH80si/8tP+A1ajvN0z3UIbzJnVdqv/ALP92sOLUppLPZt2yNuZ2/h+9VhpraNneH50XazV5tan9o9zC4qX2S3qV55bAOm4/d3L81QNcTXNwHmgjlC/61W+8rUyRnaMW0PDsm6JpKfG1zLCba5K/Ku5mX+9Xz2IVKR9JRrVeSJVWDzpBNDCv32V/nqNY87ntl/2fLb+9WmljM23emxVXdt+7uZqtLp/+jojou/71edWjCOqPVw8u5xWoaa8P3E3sqM3zbt22si+09Li55MgMiqz12mqWSQt/pO1X+4zf3axb6z2/OEmabb+93P/AA1lGXMerRl72pyN1Yuryu6eavyqnyfNVObT4YVbyVb/AGFrp7rT4Zd7w7o3/vN826svULFI0/vHerbttLm98+oweKOp8MRGP4bpEyuSLKUEN1PLVxmkw/vPnTK/88/4q7vTNp8DsEcsPskoDL1P3q4Kxknt2H2aFsfNu3N826v3fxoV8g4a/wCwOH/pFM9TKqsFOrfq/wDM3bWN47dUS22Oyt95ttSwh2mP7vZt/wCWiL8rf8Cqpp90ZoTvRtn3t38W6rthv8sI77Nz/PGzfK23+7X4PzcpOZYqPL7pbsYUk3lJmi3PufdVpY4Vj3Wz7V/gVU+7UCx7YHme4h2r/CqfxVYj85WZ7aFVVvlrWMpx94+IxmI9tLlBf3Hl/afvtudVqpcWe6P7Z/Gvyo38Natvbu0fFsrPHuWKTduamXFujWqO8MyBvmfzH+9/wGto1re8fM4inKpPYwbu32q6XKfJJ8yMtQR6akr/ACIzDYuxd/yrWncWLyLIdjJtZvmk+WrGm6K9vH9pdMrNt+7/AMtGWn9Yly+8cv1ecZGfDZ5V7aaZsbN+3+7/AHasNp7tiF0ZG/iZmrVXT/lXcixKz/xJ8u3/AHquJpMMjNC8yq2/dEv8LVwe0fPv7pvToy5rM5C80mGO3e5mO1dvzRs/3q4j4P8AjWHR/EnjuZ4WtlaeFd0O1lbcu1f91q6v4nao+k6hHpsKMrLEz/u3/u186eG/FD6b4o8SWcyTFr61ZvLjl/5aK3y19vklCpTw3tX9o+D4grxni/Zx+yVvilefZ/GVzC8ckXmSs3mSfeavPvFkj2N9FeQ+Ydzbf3lbXjzWvtlxb63skzt2StI+7c396uf1q4m1Kz+0vMpRkZtv97/Zr3IylI8L3TlPF2oTTaozptCsn3qzrySFbYzTbfl+4rfxUniK4VZN7p8+2ud1rVnkh8k7g397+9V/aKH+Il84iZ0wrf3axIpvJZofmrZgc3uijzDny2rMkj3Sb4PvUfCEfeIpP3f393+9TJB5kf3OP71SXCBl+5yv8NQTcMqb9w/urRI05eaRAx29ak2Oyq9RuN5yaVfu7PMpc0S+VCx7Nxy3SrWmSPHL9/738NU6ktWCzLu6UhSidJbSSeTs7L/FTZFeNm2fNu+9UdnM8kOxNtP3eThFTKf7VP3dzEb947M7W/vNUF0zxr8nB2U9piy4mk+X71MkV5FP75WWl8Og5EDL5ihEfbJtqG4DpDh91WrhflR4X+eqszO6N87FVo+If2dSvI2G+cq1RMoZ99Sts279nzVFMvaq+EuO42HO7bu2nNSbUZN9Mt13ueean2umUdFqhy3I8pko9NfZ/DUjR7V87fTRJkYC4NZklvQ5HOuWeHyPtcf/AKEK/qX/AOCSd7eL+yJ+0aq3coEHhjdABIf3Z+wX5yvoeB09K/mI+CHw08TfF/4p6P4D8JQK95d3itmR1VY40+eSQkkcKis2OpxgZJAr+iH/AIJf/tqfD39lvxV4m8EfG6PUJPBvjSwjt717OIyrazKSnmOgIbYY5JAxTL8LhW7fsXBeS5tmnh5nDwdCVR+0w0opLWbpVPaTjHvJRtp5pdTlq1IQxEOZ23/E8y/Ycurm9/bV+GF1eXEksr+OtNLySuWZj9oTqT1r7R8ZeCfDfjr/AILyWtl4muFWOws7TUbWFkQia4g0tJIl+cjGGAf5QzZToOWX5/8AHF3+wH+zj+1j8M/iV+zN8VvEniLQdI1221HxPHPYGQWqxTqwELyLCzsVByhU4AB3knaMz9rj9srQ9Y/4KETftY/s5akb2HS7mxk0q41TT3jiumgt0hfMZKyeU4VhzsfDHhTX7Dm+BzTi7P3i8BRq0YVsuxFKMqlOUHCpKpFRjJNe63a67x95HJCUKNLlk07ST07H2n+2frP/AATy+JfxmutN/aG/bE8aaJrXh5ltv+Ec0rULiC106QKCWREtGG9shjJuYngZwqgeMf8ABT/9rL9kn4sfsseGPg58KvixfeOvEGj6vBJbazqFrM1xFBHE8bvPO8cQd3DKCQrFipLAHDVq+M/jF/wSS/bumsvjF+0HrGs+A/GcdtFBrlvAJkN6URcZeKKaOZF5RZMRylQAwACgeK/8FAf2yv2f/ih4C8O/syfsp/C+y07wP4TmZ7bWL3TNt1LLkr/o7OzSJE4w7vJiWVtu4Dad3wnBHC1aGcZTQq4bHKphJXmqvs4Yei1FqThNU71YzltGMryTvKWmu9eqnCbTjZ9r3f8AkfJ9XPDupR6N4gsNYlEhW0vIpmEMmx8K4b5WwcHjg4OKp0V/VU4xnBxezPJPvb/gu3bya545+GXxNsHkfS9Z8JzJZvvymVlWXIGOpWdMnPIA9OeB/wCCJ/hzUda/bgs9WsxL5OkeG9Qubso2F2MiwANxyN0q8eoB7V3XwR/bd/ZH/aS/Zn0b9l3/AIKEf2pDeeHpQmieLrW3c7Io02Qu0kO6RZgjNGd0bI6orMSxrbuf2wf2A/2DPhV4m8M/sHXWq+I/G/iKzEUfia/tnkjtmBIRpHnSMYjDu6pHGVZlUPxyP5spy4ky3gKrwLHLa0sU1OhCoof7O6c5u1V1dklCWqa5rrZX09N+yliFiOZW3t1v2sfHv7ZXi7T/AB3+1f8AEXxZpTyNbXnjC/aBpJN5ZBMygg4HBA4HYYHOM15pXv3/AAT8+JH7Kfg/9oKfxZ+2j4d/tnSrmxmNpealYtf2sF6zAma5twrtPuXeAdr4ZgdpOGTjv2wfE3wB8YftDeIfEP7MvhiXSfB9xcKbC1eMxIz7R5kkUR5hiZ9zLGfug9EGEX9pynH1cFmkMgjhKqp0aMGq7S9lK1o8ile/NbW1r6O6Ss3xTipQ9pdXb26nq/8AwSV/Zph+O/7Tdv4z8UWit4Z8BRrrGqyTD9286k/ZomPu6mQ54KwsD1rgv2/P2lp/2qf2nNf+I1pdtJottL/Z3htCeFsYSQjAdvMYvKe4MmO1en+Bf2yPgL+z7/wTR1z4SfDHW72D4jeLr2ePxXPd2HlJa2jcSSrPynlfZ18tRu3h2dyqjBPxKvxk+ELkBPir4bOemNct/wD4uvmsno1MXxtjc9zVeyVP/Z8NGp7r5ItOpVSe6qTsoyX2Y22ZrN2oRpw1vq/0XyP0/wD2V7/wB/wT4/4Jvj9tXSPCdnrfjzxrM1lp1zc+YY4g08iRW7cqVjUQPK+zaZGAXdgIy8N+z7/wWr/aTg+L2n23xxOj634W1XUY4NRtbbSEgmsYXbaXgaPBbbkHbJv3BcZBO4c9+xh/wU1/Yn8Qfsy/8MS/toatBqPh4XZ/sXWdP1JJxBEZDKquIn86No5MlHjD5V9pUKp3eg29t/wQt/ZYuNM+O2r/ABm1rXRa3qvoVhq7z+Rd3cZDqsYe3gjldSAdrybP7wIr8jxv+rVHMM2p8S5ZVxmKr1ajpVYRVVOk9KMadRStScFo9murey64uo4w9lNRSSuttet11PBv+C4X7M3w/wD2cPihr0HwysYdP0jxT4KudVXSIGfbZzMJ45QgbIWNmTeqg4XcygKoUV+Is1vMq74du77rV+sn/BUj/gob4C/bQ8X+JviDYeLdNsdHtPDFxp/hrSbjWoJJlgEch3sqMR5sjsWKrnGVTLbQT+UckyTWju4+Rf8AvqvzDxhlmNPJshoZjVU8TChJVPeU2nzKyk03eSVk3d3aer3O/L+VzqOK0voU7PT3mkPz7G/j/wBqun8C+GbrVtUi022Te7Ovy/erC0eJJPn+7/F8v3q90/Z48MwtcjUprBnb7z7f4VX+LdX4TiJyp0pXPbw9P21WJT8Sa5b6Pp8Vgk0bvZp8/l/wrXk/j7xdc65Jt85hDG3yba6r49al/ZesXFjbTY85md12/dX+7XllxeJdRNt3Y+7t/irmwWFjpPc76uKlT/dn6ef8G/Pxavvh3458QajaWE00MGkfariTz9v+r+8qrTP2wtJ/aB/4KJftXTfFfx/4buJfC2jxNZaXpNnudLGz3f6zb97dI33q+e/+CP37QulfCL9qLSdP8Q3VnDp2oBrW8W++6yt/DX7R+HvFnwd/ZMste/aS+J3xK8JaL4L0pLjUPKSeMz3m1d0UMafxfN8tTSwl8zcXufreR43J6WSfW6qvUhH3f8j8Xf8AguDceHvhr45+H/7IXgPdHYeEfDMes65DG25f7Qul+Xd/tLGv/j1fDW/d8mzc392vU/2rv2mL/wDbA/af8fftIeIdPW2HjLxBNeWdqv8Ay72/3Yo/+ArtrzC4037O29/+AV+hYOjGhQjA/C8+zKpm+ZzxNSWrC3Z2X5+v8dTySf6xPl2L9yoY4/3ex3w396rG1/4NrfJt+aurlieSNXZuXYjfe+dmrY021eWFk2Lj+HbWNJN91Jkwu7/gNdj4P0lL5VQr8zfw0yJe6ZN5Yzww7/vvt/uVom4+x/DvVbn5d8dvub+Fq2te0V41/cpu/h+9WT4zP2X4S6mEh5by1bd/D81ZyKpnlEep/Z4mvZ5llmb7sbVd0+SZVa5cfeffuasKxtZrqUMseRW62+KFkz/wGg1+E7f4d+Ptb8J6tBrGg63cWN5ayq0Vxay7W3f/ABNfdn7MP/BU12mh8MftIaas8TMqReJLFfnVW+VfMj/2a/N+x1SaFldE2stdR4f8RTLCN/8Avbdm6plH+U1w+Iq09j90tB1vSvF3hu28YeDb+G/0q4+a3vLeVWVv9lv7rf7NSyTTR3O9zIiMm/cv8Nfkz+zX+1l8YP2edSe8+GfiFYra4+a8028XzbSb/aaP+Fq+pvhp/wAFWJrqaHTfip8K7X7NM/m3F9oNw0bbv91v4f4qX1iUdGj3cHmFCMfe0Z9htffavuQ/Lt/hbbWBqVj5ly+9F2fLsZpfmaofhz8X/AHxq0GLxF8NPE9vfpJ80Vm21ZYf95avSRvJCLZztk83c21Pl/3azrVos+owNRSipxkV9Nt92zybZY2b76r91q868cxovxPnijXj7XDgE9PlTivVNBtZvtSQfZpNy/Lub7teZePFeP4uyhhgi9t+q/7Kdq/X/Be39sY9L/oGqf8ApUD6fL6/tKko/wB1/ofmd/wUi0v/AIRv9qLxBd20OwX1lC33Nv3lr540rRrzU50jRGYv83ypX2p+3R8HfEnxs/a+m03R7Dzo7fSYV8uFN25v71dT8Gf+CZ+q6W0Oq+PYfscEn31+8yrX5VTgvtH4pm9aNPMJwXc+QvA/wR1vXJoXhs5m8xtrMqfdr2/wj8CbPwtYrea3/ooVW3s33t1fUXi7Sf2df2edGmRPJvJIYtqxyfI33fu/LXxh+0J+09N4o1Saw8PWy21uv/PP/wBBqpVI/ZPN9nOp6D/id8StN0WH+x9A2rt+Z5P4q8c17xJLqFyzu+//AHqx9W1q51SZnvJmZmb7rNSRq8j/AO03+392op+8b8vL7xN5010yuif8BpWh2wt3ZqmsbJI4w7uy/wC1U81qir02/N8jVRPxe8Zd1Dvfd977vzVJ85I3sodv4anmt4Vh2bF2/wDj1QvIki/+PPS+2VKMSNlO5v8Ae+8tWYV2zb3Vcf3lpkaom5U+633P4qtMx8pMIv8Ad/4FSXuy94Udje8Pyw3MCo/8P+xV6exTzNkJYLsX7tY/h9d1xsfcxb+61dPb2bpyibv7rK1HLGQ5PlM6xaSOTe7sqf3Wb71alncPHdfO7Mjfd/2agnsY2kV03SM33l/u0jW7rIH2Nt/h20fCTHmlA6/TptNmj2Pc7mX5nXZXlfxskha6RLbjc27bXVWupTWbbPOYGuF+Klx9ouYn3/71OPMVT+I5BPvCu88D332XQ5nd8FU/hrgq6jR5vsPh65ldP4dtEo8xrU2Od1Kd7q8kkk+9vre8G6bPNMjJ/wACZv4a5+CJ7ib/AHmr0Lwvpz2dj9p2fw/dojsKp8Jf1aVLa1CQvjctYyxwzN8/K0mtaptkaJPmLNurPt752Xe7/Lup/ZMeX7R0FvdQpCqJ/D8qN/FUsbSXUmdn/fVUrFXmVT5O2tyxtvs8fz/Lu/hWlGH2QlV5S7pOmpHbSuE/gavPJ9Wm8M+NHmhm2rv+Za9Ek1ISN9jS5UL/AHf4qwtH+BHxd+MXi6LQfhj8OtW1q+updsEOn2DSyTN/sqtVKIqcoyPpr9jj9obwj4HmvLDxhKba11ZI2S+VWdYXjD4VlVSSG3dexHvke2R/GH9lLVr+S8XUNCnuZmLyzNojF3Y9WLGLJPua6b9gz/g2G/4KA/GfTIdY+MOnQ+ANEuHV0k1yfbc+X/1xX5lr9Hvgl/wam/skeBraGf4nfGbxRr10sOydbHy7aNm/8eZq/TOHfFrOeHclp5WqFGrTptuPtIttczba0klu272vra9rGM8JzzumfmI3j/8AZhkh85xoLJ0DHRePp/qq9D8JeDR8UH07wZ4O8JHXF1ZY49M0iz08zfaFIBjVIQpyMAEDHGO2K/UyT/g2u/4J0NJbFIvFgSDbvj/tv/Wf+O/LXyx+wv4P0L4a/wDBV3RPAHhpHi0zQPG2s6fp6yuWZIIIbyJASepCqOe9fqPB/iZjc/y/Mq9TC0IfV6MqiUItKTSk7TvJ3jpsrdT7bhDCOng8wTe9Jr8JEHgz9gD/AIKeeE/CX/CKeBPhb4u0bRbhNz6Rp/iSG0gYEdGgW4UA+xXNPtv2Bf8Agp/4dvW16x+HXiuyuUT5ryDxZbxyBf8AeW5BxX6t/F39qv4b/CK3P9vazGsm/atfGn7U/wDwVv04eHLrRfh5f2s1wZZF3LL8zR7fu7f71fk1f6RuYUk1DL8K/wDuHL/5M8jA8JV8XZttL+vI+Ividpv7VWuasfhr8WPFXiHWLnT5g40nVPFP24QSYKhgpmdQcEjI7E1+nH/BOH4S6J8JP2ftD07xd8SYZ3RZZvsvmCNIHkkaRoypJzgsRnvjOBnFfj54i/a0m8J6hc/Ga5uYbwX11Ikscy/6THJu/irFs/8AgqT4ztbyO2sL+4jRnZkVW2sv+z/tV+ecb+MnEvHGVU8txOGo0qMJ8/LSi43lZpN80pbJva1763srfYYHg/AYWTlSqyUmrcztovKyR/R5B418HwKlomsW0ny9pFNc78TvC37O2seG5/EvxI0HQprSzj81ry6hQFQvo33q/Cr4S/8ABVHxnNcW1lrfiS4V5rqO3gj3MzNIzfw16/8AtOftvfEvwHotnpXjDUo5XhiW4TS7iJpFmbbujZl/2a/MqWb1KfuzpnYuEKcZc1Osz7y0f43fCLT/AAZe/B74ZWt14Z0zV3kS3ubOVnut0jfeVW+7ur83v2j/ANnj41/sMftTXfxd+MXiS38Z6P4gtW/4QjxBq1vtttNb+Lz4/wDn4VfurW5+xT+2xpXjjxY2sa3eMbi4ut3mMnzR/wC7/dr6p/aUvvg1+018DtX+AvjCdkttQ/fadqN7tlls7xfmjm/76/hrhp47nlKNZ/4fI+qw2AlgpxlhvhfxefzPz1174ueA9e1a88f+KvEk1zPqC/uLrULpnvL7/dX/AJZx/wCzXl9n8Rpv+FlQ6r4A84W0zsjMvyqy1698Cf8Agk74z0mbUfiB+118XdPs9Nsb2RLVtLl8+W8j3bo/L/hjXbUn7R3jz4LfDmzTQfgD8E76+TR4Ge41S8ibc3+03y1206PNFa83MdNbMqVGteH2e5Mmm/FTS5X1vxJqSwwMi+RC3ysyt/EzV86/tGfEzXrdryCz1hXdXZd0b7mVa9W1LxN4w+K2i2sPijxzefYJrJXSz01Vj2qy/L81ZGj/AAA+C0dxFc3+iXl+6/LE2qXrPub/AGlX71d8MjxMve0R8niOJI+1l7OVz4lvPiN4q+2LDC7YklZf3KMzSf8AfP8AFWjbt8TtcUPpvgzXLtZH+9b6XM3zf981+gPhXwj4A8Jag03hvwHoth5nzOtvYRqv+y3zV00etXMby+TqrRLt/wBXb/Km3+KvYpZXhqceWR5VbHY7Ee85H5wN8Ef2h9S8nUtK+D/iS88yX7sdlt2r/wACp/iL4S/tUaPH51/8EPFEUUe3fItluVW/h+61fo7NeXlzcD55pXjT+/taobi+vDCUS5uFXr5fm7f/AB6r+p4WJnGtjPszPy+vrj496PeJDeeFPEln/wBM/wCzZG+bd/u19Vfsp+J/GviPwLcR+MtKu7VrW6CW32yDY0i7eWx+Ar3bXPtLrNeQXLYb/W/PuZv+BVyFpuN7cyMWILLhn6nrzX6V4NYShDxMwVSO6VX/ANNTPpMhxWNjifZVJ8ylf8Fc8H8f6Vb6X4p1ee3yTJqcszMDkeYzN8v5EVxGpYM/z+Xhm/hr0b4uW0za3qDEzAG6bH93Ga87urWaaHyfJ+b+Dd/DX53xJH/jIsU/+ntT/wBLZz4uUnOXq/zMC+s3mco7sy7/AJ/k+as24s9rGzTzPm/h/irrxpe5lfYqj/po1TLoO1mSHan8btt3K3+zXBTqR2PnMRTlI5X+x08svv2bdv3qaunXMbG5mm3pv3J/FXeWPhl5YXmmtm2bN3yp92kbwjcrIf3Oz+L5l+9WntoRkc31WUoKSOMsrF0jhd3bLfNuVf8A0Kr9vo811MEhdtypu3bN22tubQEb5NjKGWpF059yO/y7vllVflpVKkJS94ujRnExV09/7/8AHtfzPu/8Bp/2F23zTJsRf4mSuh+x+X5UL2zbG+R2ZPu1Jb6Hc3DFPup91q4KlaEo8qPawuFn8Rg2envb7Psybov+ee/7v+7WlYwQsQwTD/Mvlr97/gVXLfQ4ZIfMdGX+H+6y/wC7RHbvbs88Ls6L8vlt8rNXBI+jwdOUR9vCW3zOjDbtZ2kf7tOuIXW1cuNw/jX+7Vux01JpvJ2b/LX51b+Kn3Gn+dZiHY0Qb5vlqeX7J7NGnzR0OaurF2mKImxFi+9J826siaz/AHgld5Ei/iWN/mautbSXaPZM6n+Gs/8Asl51dHeMBVbbXRRlA8PGYOXPzM4C11IzXDed8pb5k/urW5o+seYyo9+wH8Fcku9pN7vmTf8AJtT71La6k8fz71xX2EJfyn5BKPL8R6xpuvcFPOVlZF3+Y+3ctdz4f8Q2ybZkmZo2b5WWvDNC1nYyeT8/95pH+9/s13Gh+KnXc/n4ST76q/3WqK2Il8I6cep7HpmvJdSK+y4cs+3y4327f9qt/T7xNrJcozOzfw/xV5Z4f1y2lX/XNlX2/K1dZo+tM0eyG5YOrr5sleTiMRPWCPcwtP4ZHb2mzkzQs5mX+Fv9Wq1fhazaNd75ZnVU/i3Vzel6k74hS/8A3bff2/xV0ujzukZd3X5v4V/hrw8RufUYXXc1Ft0aGO2eTe7ff8xflWrs32beuEZF/hbZ/wCg1UgkEcYdH2/N8zbPvUv9oeYuxH8xl+Xatcso80PdPToylza/CZWpx2crN9mTj+Ld97/gVc3eW9nawsiTTZV/4vmZv/sa6HUrzyYVm3xn+KX/AL6rB1a8hVXmmlVmkl2p8v8AF/CtEf7x206kYGVdM8OLnzl3Mnz7vlZV/wBqszUJJ5rX5J98X92tS8+xpvmT55pPlf5t3/Aa56+kmkjdESRdv/LNaz66HqUcV7OZ2ukBIvARCsSq2koy3turgIJJmtTcwOvzP8m77u2u+0qRH+H7OCxX7HNyep+9XmU0bvtRH3fP97f92v3rxnhKeQ8Npf8AQJD/ANJpnVPMZYRp9zoLFprGFn+3rs8pWZtm1a1rWOG4zJvyyv8ALtf7q/3q5/TZvtMiQv8AMipt2tW5Z/uLlLx32wr/AAtX4DKM+blOCtmntomlYyPCG3jeqv8AIv3VZa0VsUmZ/nZWkT5P97/dqlZzQ3C+dC+NqbmVl/8AHau2sc0g2O6yLIny7k+Vf/sqXN7usjy5VOaRPb27x7NjruX+L+H/AIFSHT0m2wwpJhW2qrP8q/8AfVXrDTLm3gRNi/K3977y1qw2dtcRibZHvZP4v4a56dYytzfZMRtI+1Mr+TIFb7zb/wDx2thtLtmjj+zI2xflT5PutWla6L5bRvCilWfdtWtKGzkuLcW03yfP/q2f/wBmqeaMmk5Fxo+5zSObXTZvsYWZ/MG7ay7PvU29s4dNs2d9sSKrPLN975dtdCump88MKK6N9xWf7teeftReLD4F+Hd48Lq8twqwRRr/AHm/+xruoQlWxEYHNi5Rw+FlUfRHkln4k/4Trx7rGpbFW3tbVktfOuNy7dv3q+dfGmoTaB48a5SZQs0zI7Rvt+Wux8D+NE0PWNVsIEWJLi3VZZF+Zo683+L0iXX+nwo2/czK1fpdGn7OjGkfj1WpPEV5TcjM1jVJLy4vNGm+XvAv8O2sHS9chjmbTbybake7ZVG41aa8VLxOXX5XXd/drnteuJluH1KB8Kz7tu+tRR/lL/i6NzcS3ML7g38NcfdTPdKUf5TH9yt268Rf2lpOxNu9fuVzl1Huk3pu2f7VHvyHEv6PdJGrQ3L5Rk+6v8NVJLhIZsmZvl/hqKNvs7B9/wAtMnBlcuE20FlopDcfvkf5f7tVriNFZvKTaGqOKV4n21Z+1QyITs5quYPhKW35s05PvClk+VmSm1RXxCP901ImSy1G/wB008fIyf3anlCRr6e0a437l/vMtWZFh+dN7f738NVdNb5dm/duq1cyiSEp0VU/hrOUp/CZ+5zkEkkbbtn3qj85Gbp/wH+9SPOnl/u3yf8AZpi7Np+fbVFD92z7gxUVxGjSNIU/3/npzbNuzp/tU/anlsjv/wAC/vUE/aKkzfvOOPk/76qu/wB01Zmjzl/u7aqfwfjTj7pcYj7VtswOauTWs0kn3/vVTsXzcL8ma6RYEmtg+za+3alVGMxS5UYFwkiybJui1C0bL9zpWtdWqeWibMP/ABLVDy3iIx12/PUC5j27/gnAhH7W3h8t1+yX3/pLLXr3/BS34y/Fj4b/ABZ0LSvh/wDEbWNGtpvDommt9Ov3iR38+VdxCnk4AGfavI/+CcygftbeHc9fsl9/6SS12v8AwVjx/wALr8OFv+hWX/0pmr9zyfE4nBeCWLqUJuEvrS1i2nqqXVanFNqWNV+xyHwH/aF/aE8V+MV0/VfjJ4iuIlhZmSXVpSCdvpmvY7/4rfGmwjW5HjnVJUQZfF6/6814H+yppqXmvX135O6OG1Xd/e+Zq+gVs4W2xp92RG2K38VfiWN4mz6ElbGVf/Bk/wDM48Xyqpoj7g/4J8+LvCfxP8G2R8ceH4NSvA5jke5t1keRgvQ5HWvtfw98CvgvqGnxNc/CnQmnfh0TTo+P0r8q/wBiv4np8M/HEWgvNNFb3E+9I/u/N/F81fpz4b+PHw38G/De58VeP/GWn6Pp1nBuuta1KXbFbr/Erf3m/wBmvWwHFedTw1p4qpdf9PJf5nl1FUlU5YFzxx8B/g7pMLsPhxosA2ZVVsEDH9K+U/2v/jt+yr+yjo6X3xNk0iwvJ4WMGg29sr30hH3Ssajcqt/eavCv21v+C6Wr+Mrq/wDhj+xtYf2fZSRNa3XxC1aBvtd0v3Wayhb/AFa/7TfNX5V+O/FPibxX4uvdf8X+I7zV9Qmnbz7/AFG4aWWX/eZ6ipxNn1aVli6v/gyX+Z6uCy+75qjPrXx//wAFNdc+IurzHwjp0fhjSYnUWtvCA1zIP7zyDp/u1na/+0n428W6BHeWnxV1fTNQj5R7HVJFikX/AG0zw1fIO98ZD45qwup38YCJdvt/368+pmXEPtLxx1X/AMGT/wAz1FhoxleKPoXT/wBoD9pnWIT/AGD448VXmDhpIb2Zv61U1D47ftgC4a1tfE/jHOcKVmmb+teLab8RPGujqE0rxNdWwX7vlS7avD41fFvem34haplfu/6W3y1pDNs/hvjKv/gyf+Ztyp/ZX3H6PfCm58Z+KP2LTN45vLy41m88Makt1LfMTMzEzqu4nvt2j6Yr4+8KfB+2haKF7m1kmZv9THPG0i/7TKtfVXwJ1DX/ABH/AME+0vtTvZ7rULnwhqwM0jkyO2bkLz69BXxj8JfBOq+BfElt4qv3k+0w/N5e77395Wr9W8YfaV8myCc5Xk8LFtvVtuMLtvuzz6FRU/aWetz7S/Yv/Zfv/Fvi6yeHSvtFusvzbW+Zm/2a2P8AgsdqFtdftDeGP2afDvmNpfwt8Mq10u7cralefvG3f7Sx7Vr7X/4JY6H8Pbr4Tv8AtCaqkNto+j6XNf6lJt+WFbeNpJPm/wCA1+cnijXtT+NHxC8U/HLxI7Pf+MvENxq0rSfeWORv3Uf/AAGPbX4rTj7OhdnHTqPnlVkeN3ngWa+0/fCjKY9uxq4vUvPtbiazmdkVX2vu/ir6D1DSYVXYHZEX5UjrkfFXwoTxpH5EP7u5bau5fu7f71clbBxxf+I9LD42cPi+E4Dw7dQ2tv52yRP4fubq+uP2Q/Deg+JtBks33STSKrL8m3d/s18neNvh54q+Gd5BZ+IYG8u4T9xIv3GX/wCKr2z9iX4tJofxJ02zvJo5LJZW82OT5dvy/wDoNfF59g8RTpuB9TlGKoVKsXL4TU/ai/ZN8aeIvGH9o/D3Qbi+Zkbda26Mzf8AAa5T4M/8E5f2iviZ4nt7b/hANS03TWlX7RqWoReUsa/xMu771fob4V1azj0C38VaVcRm+a4ZZfsqfL97cvlt/u1u+LP2irDQ47zXviR4wkt9I03Tftk8zRfu4VVfur/tNXJgs1n7ONOEfePpa2V5fOXtec+Bf+Cxnhv4afsxeK/hf+zZ8DfDFnpl54b8KLq/iDWIVX7TdXlx8v7xv+A7q+M/iF8Y/in8ULK203x38QdU1WztW3W9pcXTNFH/ALq16B+1H8adb/ae+OPiT4161JIF1S4WLS4bj/WQ2cfyxL/3z83/AAKvJ5rU28hfZuTb8lfo+Gw0XShOovePhsRjKsas6dGTUH0Es7jawRH4/wB2r7SPJGA7b3/g21mQq8M2/d8rP86tVy3uETMz/Kn/ACy2128vunnSkS28myb98i71/i30s10NrP5NUdUZ4ZEvPlZPuvt/hqBbnaQjzMf760uYZr2snmSbH3K/91q9l+Degp/Zb6rcpt+Vdn+1Ximh3KXEyJMfuv8Adr3v4e+Rb+FxMJtz/wB5qfLzGcpFLxhZpDdvsRpUXdvjVvmriPi8ws/hvJZ/KryXC/Ktd74mk8yMvt2p/e/2q80+Nl0kfh6KL5t32hV3N91v71Eub7IoL3zgLKKHT7Vf3eX27qZNdJcfP/C3+1UdxIjRqibm3Lu/3aqx3AZv92o983j8RbhkRlZ9m0fx1qWN1ux5U3y/e/3aw47j+NHbG+r0Nwn2dE3baA97nOw0HXLm3uAEmZVb5dtdz4f1yFdsaRqTv2srfNXk+m3STTbAjBdv+sb7q1q/8JhDplwn2BGeRf8Al43fLuqvdKPZ9P8AFlz8P9Qj8Q23iG60qeGXzYri1naOT/gKr96uv1T/AIKkftSyaOmg+HvG1udq+V/al1YK9zt+7Xy42sXOpahLf6lfyS3DN/rJHrc8O2v22ZX+81R7GlKV2VRxOIofBKx6Bq37Q/7Q/iaZtS1740+JJZW/5537RLu/3Vr7L+BHxF8SW/7PmlfE3xHdTazqNjp095K17MS1yYZJCqMx5wQgXJ7V8H6tdWtisNtBcqWk++q19qfB9Fh/Y6jWZyqjw5qG44GVGZ8/lX6/4NU4wzbHJf8AQNU/9KgfacH4qtWxtdyk3+7lv6xOQuP2zvDFn8ZJPip4b8NzRLeRRxPZ3EXzW7fxf71dH8WP+Cgm3QWtbDclxNE29tnyt8vytXytJ4i0qzXZpqb9vG5vvf71UL64sNcVvt9t5is+394+2vyH2cYnwlaXtqvPLWRzPxi+PHiHx5qjzXl9JJ5m7f8AvflrzS5vri+m86R2J/hr2K8+EvgnWbX5JpLQqm3dH81YF18C9Y0+YPYOt7C3+qWNNrVUY+8HwwOGsdNubhRv+b5vvVtaf4f8yRcv92u20f4SaqrLbJpUxO/7qr91q1tN+EevPcNbx2DBv71b+zI9p/McTFpsNra/Ii4V6z9UmRV+R1WvTrj4FeP75fLsNKZg393+9WQ37NPxguZFR/BkjIzfPN5qrtX+9S5BRrRkedXMe1TvfLN/eqFVTn/vnbXsln+yD4tkk/4mviTSbBNqv5lxeq23/eq237N/wx0dvtPiH4tQv95mjsbfd93/AGqy5YfCXzfaR4psc/3dq/LV2zt3WP54WU/7Ve1aX8KfgCyqltealfTNKrRL5qqrR/xfL/er1P4f/sm+HvHV8mm+DPgteTNcS7Eur64ZlX5fmZv4VX/eq40+Y55Yjl3PlLSLe5hbf5GTv+9XW2du81uj/edl/hb71ffXh39mf9mb4Q6PPbeLfhjpvibxJ9n8q1jVma0s22/eb+81YWg/s2/DTVNY+2ar4YV3ZVaXTbOLYka/7P8As1XLTM/b1f5T4l+yvaxrv3Dc1MjiRbrY8O4/d3fw1+iUP7PPwKtbo2z/AAl02K3hZW3KjeY3y/MrV5t8WvgV8H/Mlu/CvgOFIlbbLIr0/Zlyrcvu8p8V6hYoreckLNt/u15t45mM15sHRa+7dD/Zl03XN7p4VWNPmZZvmVWrTu/2KfgtY2Ym13wxb3N20W54YWb5qXLHlCFbll8J+dWk2JurgJiui8QWM9loax7P9lttfeOk/sE/CvVNUhmTwfDZwSL/AM92Rfl/2q67w7+xP8AdJ86HUvAcepvv3RW9xKzL93/x6nCMf5gljJSlpE/NDw1pH2i6R50wiv8AN/s139xZXjWYs9MtriZ1X5Vt4mbdX6KWXwf+FHhqFE0H4N+H7OX5lVZLJZG/3vmrpPDPwjub6H7Xc6bp9nDbory+XbwxxW6/xMzKv3aUuWOpP1iVSZ+V0fwp+KniC8CaV8OteuVk+55OlyNu/wDHa+ov2Vv+CFf/AAUc/an0yPX/AIf/AACvrLTJuftmq3C26/8Aj1fof/wSY+Cz/wDBRb9py/8AD2l+cnwt8Cyq+rXkabV1KRW/1at/dZlr97vC3hHw94K8P23hnwtpMFlY2cQjtbWBNqRr6CuiNShQjdwvITWJxWkHaPc/nY+EH/Bod+2jqzw3fxL+LvhnRIpP9bHHK0zxr/wGvp/4ff8ABoF8GbfT4/8AhYf7S+sveNFtnfS9OVl/4D5lfs1swPljH4GuR+HPi9/G8Op+I4Jt1m2qTWthhfl8uFtrNu/2m3Vnic2nTpuUYRj6L/O4U8opuXNUnKXz/wArH5zfB3/g1P8A2Dvhx4ng13xx468UeKoIJAyafcNHbLJ/10ZPmavvX4Ffsn/sw/sv6RHpHwK+Cvh7w3DCm0XFjYL5zfWVvm/8er0jc3c1ka1bzXnyIjbPvNXxONzrEyd4HuYfC0o+6WrrxVZKjGGZWEf3m3VxGv8Axshs5pIIbmNpFbair/eri/j78QrfwLobusjIkcTO23+HbXyav7V3/CG/b/GetnfbNKrQW7JuaT+LatfPVsdmGIu3I+nweWUILmlHmPtPWPjVcaP4fXWtV1FbTzpFiiVm5aT/AGf71fkV8L/iI/w8/wCCiF58Rb66jZrLxrrU0srnarlvtQP0BLfrXtmm/tbeAPj94ulv/i1qt94ZttPv1ntfMRl/4DHXy7d3/hu0/ae1zUb7Fxpa+ItUfLHIkj3T7Sf0NfvHgxUqzyHiNT/6BJ/+k1D6zJ8NTo0a6jFK8X+TLn7fX7bt54k8VXdsl5NbPay/PCu7arN93/8Aar4q8YfFabWGW8m1Jre9mf8Ail+VvlrR/bi8babq3jee5s9RZ0kddkkdxuZVX7q7v9mvmjVvGk0l0yJc5C/d3V+M08LSlC6PJWIqUpcszsPG3jrWPFXljWLyQXML+Vu+6rL/ALX96uKuPEGvWEjQxw+dubbEyv8AMrUxfEH2hvJd1DyP8rSV9mfsd/8ABHzxd+0P+z4f2tviz8aNB+GHw4S5YWviTxLbtLPfhflb7NAv3lVvl3NW0MLSStI9KWMoRjF31Pnbw74R+Iug6LZ/EL+29N0prN1uLCS4v1Z/l+b5o619H/aY1X4xeJtXPj/xlcX+q3Uu9Fkl3Ky/d2r/AHa+mr79i/8A4I1+HrBf+E2/bk+InjL7KzLOug6dDaW03+7u3Mq1xnj74I/8EmvDscWt/BaHxRDeKrfZb661xpG8z+FmVa5JQy2Xxz947q1XHxpRUIWj5nI/Cfxd4q8I+KUfw9DIf4W8lNv3q/RD9iHXtNsdcitvjxpv9sahMm+10u8bbHa7vuSN/e+X+GvyQ1T4gal8NfGe+bW5r+2Vma1uN33l3fLur6r+Ff7cXhXxVr2meMUmaz1lbCO11L7ROqpIsa/Ky15mKwtOPvRReFzD937Pn/xH7YfDWz0nwt4rstW/4QzSr/QZv3U9g8XmNbq3/LRd33q1f2k/2RfAPxH00/EP4f2dr9ssoma40m9TbBeQsv7yP5f9mvkH9kP/AIKC/Ca/8PC78R+KYb4WaM0sfn7YlVfvbmb+Kpf2af8Agof4hvv2ltV8H+Jri9vfCeu6jI2mwPLtW3t9vyrH/erLC46UI8jiRmWUyrVVVpz+z9/kfAOuX2ifCX4i3nwZ1vWI47631SZ9Gs9nl7rVpG2qv97b92um0u8t1VIf4tzMjM38VeWf8HFfh/w5Z/t+WNt8Lbq609v+EZtdRtVtfla3aSRv/iab+zn4i8bap8MtMvPHepefcqyq8yrtZl/vNX6LhZVqmDjKfU/Mak6dLGTproz2qLU5+P8ASVk8xP3qrF92ry3k1qoPksHk+V137VWuVs9W+zzboSu3Zu8tU+8v97/ZrX026uZLrfvaRG2ruX+Fv9qrlHl1O+nW+wdXp+9o2h+0szfL93+L/Zp+5JJAknnRJJuZFb7y7W/iqhpa3ir5T7Y1jbc/8Tbf/iq2Psr3G3fPvX725krlqS5Tvp1PsmNrGmw3EMyb+G/iWuRurKSzuXDmT5mPDnvntXeTWv2WN9m3Kt8ism1V3fxNXL+LorWK9C2YITc2cSblzx92v0rwYd/EXB+lT/01M9vI3J5lTv5/kzxr4i6Ib7U7uEkoHLEqDgcn71cJceHUtWebfkM33W/hr3TxV4VN7a+a0bASKHJ/2d1ef+JvCqNM3+hqkf8AeZ6/L+J6kpcQ4yP/AE9qf+ls1q/xpX7v8zgE0lGV32fOr/M3/stWbXT7mE+ds3rtXcu//wBBrebQUMizTJ86ru+X+Jakj0Gbzt/k/Lt3ba+ejU5dDhqR5veQ3SdJhuFebyNrtt2fP96rS+H/AC1WZoVmC/dZX+9WvoOhpayOk3ludu5V/u1uaf4TMcRhm01Sjfw7tu3+LdSlV5ocxtTpy/lPOrzw/wCTF5zo22RvuqvzLVJtBuZJNj/M+z7zN95a9R1Dwj8yySIzBdzfN91qzpPCaNIkiIxH3dqp93+9TjWnL3WRKjLnsonCLodyrjy+qv8AxVdXTUt2CTQ5RV27o/mbdXSyeHYYwiP8zMu3b/E1WbPw7IFWb7S25V+dmSsZSh8Uj0sNTlzcpyseizSQtCiMq7/+Wi/d3VlXWl2cbO7/ACqv8Lfe213WqaXeMuya5XYvypI38Vc7q1vctJNtmjKqq72/2qzp1OY9yjHlloYJXy408v8Ah+ZP722pGuJo5tn2WRxs3fL96mX023Z/Ei/M7L/eqH7Z5x+020i/L9xd3zba1jKR69GnGQjTf6OEKSB/vbZP4Vpk1mkK/wDLNmb50/2qYs1tNCNiZWNNqbqTzIfOyj/dXav8TNWtP4jjx1PqeXarYPY3Don8Kfe2bWrFmkdt8aDB/wCedepeJvCvmKs+xV/i+X71cdrPhSazk85Nv7z/AGa+kp4jofi+Iw0o6nPaXcTWbb4UY/Jt2/71dZouoXTRh9+7au3aqf8AfVZEemzRMu/aGZa29JsZo5UtYUx91mb7v+9RUrHNRpcsveOt8PyQxqtzM7fN8u1W+7XbaTqWJPkdn3J97+KuA0uxeGNnjfzv4krq9Nvfs0Pnb8PH99VrzqnvS5uY9nCx9n7x3ei301nt3orf32rr9C1hLhV/1aLs/i+WvLrHUoZI0S28xTvVvmetqz16Xar3Lw7N+1t3yyM38NcVSjKUz1KOI5T0tdWtpoW8lJBHu+VlTau6o7rVEWb55tiN9xl/vLXJaX4gmaN3d22fdRo/mXdUOra69vdb/tPzfwNG/wAv+7trGOHn3O6OK5o+8dBq19Gsn75+W+VG+9urIvrx5DseZif7sf3d1Y114mc5+07W/hRf4qo/29bTb5EdnKv8m37q1UqMuX3zT65SjLQ0by++aWGb7yt87fd2rWRdXkMz537Sy/eZ/wCKoNS8QW0K7/Ok+b5fLb/0Ksu8vpmb7iu2/d83y0/qvuxKlmUUeq6C0k/w43eblmspsOQP9rmvMVjdmEMKLj5VlX+7XpPhlwPhaJC5IFhOST1/jrzyx3tKPkV0/ut8tfuPjGpLIuHEl/zCQ/8ASaZ3ZpiEqVCT6xT/ACNXS1+zqET5nZvmZvm+X+Gt2xsz5becjCON8o2/duasfS3RYfM+0qkv/PNvvNWrDLCsyQu7O0L/ADf3dzV/Pcqkuc82GK5ocpsaT+8keHpJHtZ/O+626tuzCXClPJZJWT+F/lWubtbya3VU8jO5tyVehuJPJ/4+WZ1b/drmrU/3vOduH5pSlI6G1uob6PZ50Z3ffVvvLtrWiurZdttNbbH3/wAXy/w1yEN+8kkWy227f4fu/NWtZ6s65TyVfb8qbn+7XFKnKPvROyn7szrLW4hk2wj5Ek/hZvu/7VasLW0zb4PnSNNv95q4iHVkhZnM+f73ybm/75rVtdVdXR4V4Xav/AacYx57m3N/MdPH8reS8ypGu7bJInzV8n/t6ePEvPE2m+A0dcWe28umVPm3fw19G6n4kTTrW5uby+VGWJnRvK+VdtfBHxa8YXnjDxpqnieaZm+2XTfe/hVflVf92vqeHsL7TF+1l9k+T4rx31fAxpR+2clpmvFfE1xamZYkuLdk3NWD4uuHkhe2fkxqqvVbxRffYNUS8875f9ml1TVIdQt/tj/P5y/Mtfe8v2j82+E88m1AafcPDcrwrttVflpl3B/aFr5Py7WX7y1L4s06PdK6bUXf8n+1WNp946/upvl2/KlPlQSlMz7q3urHd2RmpkkjzbpFdvmrW1S3+1Wp2P8AN975awnieBz6Uy4/CEgKBlxTJJE28VMpWQh/mP8AvVHPCit/8TSlIqPmR7fMzv8AvUwllb56e33zs+7Ss26P56UTQbTWV2bpTqKctgCpGj2hNn/fVR1LJJuVS6YK0yJblzT1/ds+/dt/hq55iLjZDlf4kqlZyJ5Owp81WtrrIQj/AHan4jIim+Vm/wDHaZJIm3Y7sp/u0sjOzb6Yzbmx/F/eqTQfHJwqJ/6DToIYWVqjSR4+j/dqTzn8obP+BVfoZy+KxHcbVjLtxWezbqs3zlhhvl/2aqnk5NL4jWmPgO2ZCP71dhb28clur7MfLXGhtrq5/hrs9JndrON0m3bk+61UTWKl1b7lyn/fVZslt97ZBuNdFcwusfmPDtrLuFfcdibaDH4fiPXP+CdUZj/aw0BXAP8Ao19tI/69Za7H/gq+qn40eHGIJx4YHA/6+Zq5X/gnnE6/tX+H3f8A59L7/wBJZa7L/gqmm/40eHe3/FMD5v8At4mr9lwH/Ji8X/2FL8qRg/8AfI+n+Zy37H+jvJoesar9mXYssaRSN97+9X0P4J03R7q087yfPuPvJ/D5deYfsg+A7aT4Nw6lczTRNqGqSbWjib94qr/er2XS9JttHX7NDYSSt5W7dJ/6Dur8FxFGUqtzgrc0q7scb401a50PxMr2G2B4/nRlb7tRftBfHzxz8btH0rwl4k1DZomiwK0Wkx/6uaZfvTSf3mqb4jaK8MKarqVmyNcM33lrz/Wr5I0SGzTG77y1hToe7bmLpxieeeMYbOC1mv0tlTy03LtTbXhV3I01y8rvuLOx3ete0/FRrm18Pzb5vmk++u+vFXh8v79ejh48sD1MPyqmMeNVUU5Y3kpT3/2fWpbeGRmDhcf+zVudHMyHyXLKnZq9E+DfwdvPHN8LmaBvs0LfOzL97/ZrO+Gvw51Lx54mttEs7OZ1kl3SyRr8qx/xNX2T8Jfgrf8AiDULb4dfDfT22RyxxXEirubb/eXb95qiXPKPLE4sZiZUz1v4W6Bb6T+yxH4d0dBGseg3sUKp0ViZun4mvk6TQX+2fYIUwscux5N25t275q+5fE3w/f4O/DrUPAcSSCTSdFlGJvvFzCZDn8WNfLnwt+GviHxprS2em6bIqM677pvlVf8Aar9m8V4t5Rw9f/oFj/6TTPKjU0cj6w+G/wAYNX+E/wDwSK8T/CLRHkTUfiF4th0G3bzV3R2O3zLuRf8AZ2qq/wDAq8Ek0m2sdL8iFFhWNFSLy0/hWvUvjF/YOg6L4Y+Hugozw+HdNk+0XDJu+0XUn3pP/Za80uI7zXJPJeFj8/3fu7mr8WjH20vdL9p0exz39izX14+yNnaR1Wu68N/DvTfDGi/8JJ4kh8lm/wBV5n97+81dJ8O/hfZ2Ni/iLW91vEvy26/7tcR8dviw8zP4b0p1XduX5f8Ax6lWxEMLS5Y/EKXK/Q8x+N3ii28a3klhDbedbR/OjbP/AEGvGLvUtS+H/ihP7Bm/eKm9f92vUraz8y6+0/Nll27ttcD8RNFe28QLfww7oZk2oypXku2I/ivmOqjWnT96J6B4I/4KKXvw68KDwn8QtE1K/aDdPZrZ3Hlp523au5q8p+Lv7Z3xU/aI+yaP4huY7LSrX5V0+z3L9ob+9K38Vcl8QNHS+0+Qwwtvj+ZN38X+7XncUz2dxt3421tgcqyylL2lOFpHtRx2Kr0uVyPT1ukn8v5GP+0qfLWdd2aNC29PmrH0PXJtvzu2G+XdW3HcJMrQ9vvbq9nmOSXPGZhXSPbr5LorfxJUc2yFU2btjf3a1dQhQR7HmVqzZInm/c+XsZXpy5hx194lhkmmj+yzJ8jfLWXNvs7h4XnUlW27v9mrLB47hfOf5VenapbvfW/nBF8yH/x6iWxcSx4XZFut7oq/PX0N4XkL+C7a6+0svmLuaNk+61fOHhu4f7ZG+z5m+XbX0Bodx5fgdZnfd5fzRR0RlymVSJpXkL6hYyo7r+7Xd9371eOfHiTy9Jtrbfs/f7mhr0iPxM62YT+KRN25a8Z+M2sXmoalFHN9xXZkpSJw8feOSjvJmjKO9RvJ82xxTKOCKfMjq5R63DxR7A9Wobh5I/nm2p/s1QTp+NPaT+D+7THyo1G1J/uJ8sO37qUsNw8u1Efhv4f4qzF+Y/J96r1jNNHJ+5g8x2/u/wB6szLlOkhj03TbUXl47E/wr/E1amk+Orm482HQ9HVVX5WauRnjaE79avMOv/LFW3NUkPirWBYvpWnzfZrVv9bHH/FV/CHxHb3V9pWiyJf+JL3zb+SLclrCu7yf96vt74LaiLz9hldSMW0N4W1Ntuc9Dcfma/OW11D5lcI3/oVfoZ8B3B/4J9I4XA/4RHVsAf71zX654N/8jjHf9g1T/wBKgfYcEpLGYhL/AJ9S/NHxXpusPdXzoj8yfc21ryLpmn7H1jW22N96GFNzLXAJqdyrDyXk/efKixpuauw0JvCvguGLW/HkK395J/qNB3/Krf3pm/8AZa/IvhPi+U6nwrpOuasq3Oiab9mtPNVP7S1K42r/ALy13eoX3wl+HLQ2Gq+Kpta1hdz3Cr+7trdf7qr/AMtK8M8RfFTxb4w1KOa/vMW1u6/YrGH5YrdV+6qrXOX2ralcXz3N5eM8kjbmap5plfF8R9J2v7QHgy3meG2hj+zq25o1+8zVUvP2sNH0Ni+m+G7eVm/ik+avnGK6mjjLo/zM1Ps7O81OZHSGRi38WynyzlpJhywPbNe/bE8Z3CyW2lTtbJJ91Y/l/wCA1xV98dPiLr0vkvqsy7vv7X/8dp3gn4E+PPGd5HZ6bokxaTbt+Wvqr9nH/gl74n8TTRX/AIw8vTrdZVaXzvm3L/Ftq/Y296RjKtTpy92J8v8AhvRfiX8QrxNKsIby7Mj42x7m3bq+n/2e/wDglb8afikyX+vaDdafbLt837VE25q+8/hD+zT8Af2S/Bdz4217+y7e2s7ffLeahtjkb5vvLur5o/bE/wCCziWsN54D/Zmf7HFNuin1Bn8zzP8Aajp81KHwmcVUre9ex6Rpf7Gv7LX7Mc1s/wATtY0+81WS33Raasqs/wB77rN/DXfah4g0258OjRPDFtZ6PZXHzxR6XF96Nl+6zfxV+Xvw5+IniTxZ8QLn4heOdZuL+9m+Z5rqVpK99b9pzXVsYLC8muES1i2xSK3y1HPVI9j7x9dQ+BfhFpOi/wBveKvFUKf3odu6Vv8AgVcr4m/aM+Ang2NU8Nw3V3NuVNzbf++v92vib4tftRa3qEkltYXmfk2xSM3/ALLXEWnjrX/Fmool5eMfM+bc396sv38pGvs48p90t+098H9SuHFzY3lt95Uh/d/vP4vlqfxB+0l+zfqGivYJo91EFiXz1aJd3/Af73zV8cW+nvfN/wAtMbfvK1al5pdh4d0s3Mzx/c2p5jfxVpH2sY3bJ5YylyntV5+014DXW7iz8JeHry20tdyxSXnyu3/AaJP2lvDcMcKeH9NkaeFtss00W7/K182trH9sXvlaVN/s7v71dd4R+G/iTxBNDbfvNjN8/wAv3t3+1R7OUve5glyU9j27/hfmpapH9ms4VQru3Rxr/rNzVt+E9Q8beJmltrCFlmkXduk3MsfzVH8N/wBnn+zbUfbLDY6qru275lWvfvAeh+G9Ls/s1hFbonlR/wCkN97dWkacacfiMZVPabI5X4ffBvWL6N9b1t/KVZVV5JPmaT+9trwD/gqB+1Y+gIv7HvwguFgn1JY5/Ft9Zj97a2/8Nv8A7zfeavo79qf9pLQfgD8HNT+J1/rEYuLVNul2MMH/AB9XDfLHGv8A7NX5l/AHQ9Y+Knxqi8VeObuafUNY1uO41Sb/AGpJPu/7q7ttRDkky6dH2ceaR/TV/wAG737KWnfsyf8ABO7w5evp3k6n4ukbVL12TDNH92Ef98/N+NfeJJOMV5t+ypYWHhv4BeEvDFmipFp+g28Cqv8AsxrXo5mRByRV1+f2judWFlTVBWMD4r+JIvBfww8Q+LWmMX9n6NcXCyL/AAssbFf/AB7Fct+zZpLeHv2fvClrdERzyaJHdXW7/npN+8Zv++mrj/8AgpR8QJfAX7CfxT8UaXtknsfB9xIqbu33f8a/L/xj+3n+3H8WvAOg+GPBetR6FpS6Xaosml3X79Y/JVVX/gVeHnFSVPDKNviPUy+nTxdVx57WP198X/HD4QfD6DzvGXxD0qw/uCa9VS1fI/7Tf/BeP9kz4La23gnwPb33ivVt7JIthF+4hZf7zV+bt98HfGHiC4+3/GP4tahNbx7mltbi8Zm8yuT03xl+yj8LZLzVZvAd14n1j7R8+5WjRf73/Aq+Tti37spRXotfvPo8PgcvpyvJSl+CPp/4lf8ABSP4oftD3R1O+0GLR9Ml3fZbGA/M392uE8VfGqaHw69tbaIuoXUkqqkc33lb+9/31Xzf46/a+8c65rESeCfhXZ6RayOsEUP3njb7qt/3zXo/g3xlf+GPCt9q/iqa1h1VYIWt45vn2xt/FURw0YbHqwxMKn7uJYsfG3jDxBrmoQ+LbaGGJUjfzpk2xw/7rV5n8evHmofD7w14j8c+FdRjuJbWSRra6kbCzI8uwsT/ALSsefeuW1L4u63481zxP4J0bW7i6abbO8ccvzbW+XatdL4p+EGq/ETwNcfBy0jMd3cWi2uy5l2FWiwSGY9PuHOa/ePBqEHkvEdtnhJf+k1D6DLZtUa1t1F/qfJnwr8A/EL9sP44aH8H/BOlySaz4q1dbPTreP8A1bSN95pG/hVV+Zm/2a+5vjb/AMENf2VP2ara20P45ftT+M9f1w26/wBo2PgTwzC9vYt/Eu5m3SbW+XdXhf7HPgv4i/sD/tYWXxc8S3Nm9vpuh6klncWsqyNa3EkLLE23+Jqwfjd+3V4w+KHjy38eX/iS8iuVsI4vmuNqqy/e/wB7c33q/F6mIlh4eypRPHwuEo1H9YxMv+3T17wb/wAEj/8Agnf8UL6Sztf+CkHiDRrlv+XDWvBsKyR7v4fvfer374//ALbnwr8A+Ebj9kPwlqMepeHvhjpen6To1v8AZVjguI1j/eTeX/eZvmr80r74669qnio6xDeSRSq6sm19qs1c78Xviff+LPFUnip9v2+6iWK9k3f6zavy7q4KtXGYmPJPb+tz0o1snw0ZTo/F/e/Q7H9qTxH8Or7W5db8H6Ja6bNMzNLHZptX5v4dv3a8cj8TX8iukMzJ8m1dr/M1Mg0/VdfmSGYKjbt3zLXT+HfgD8SPFFu15pRhwv8Ae+X+KuqjBOHLPc+YxWZYipVk18Jm6B4F8beLozczQTLZ7lTzpPurXs3wh/ZHspIf7e1LWFuIo4v3sK/drj9N+CvxR0XUIvC+rePIdN8xt/ls25W/utX0/wDsG/sTyftIeMtY+Hmv/tE6xpt5ZwbUutLVfL8xl+Xd/u1x4xVoJy5oqJlhac8RU9xSuY/xSm8GfD34f2WjeErOx8P20MWy6mbdumb+9u/3q1P2Rf2rIdN8bWXizxpq9nFo/huLeuqK27azf7P+1X2f8M/2SfgJ+wva6d4c+KOveGfG+p61p10mt6l8QLJXgtY925bhVZv3bKqtX5a/tofGD4Y/Gz9qrxn4n+COh6bp3g9bpdO0aHTbXyILiOH5WuFj/wBpt22uLJcLHNcTOlf4ftG+PzbGZTaUv/ATf/a2+Pk37c37X2u/Hia28q0uorew0aHbtZrO3+VWb/aZt1el+F7pNN023htodsUcGxFj/h214Z8GRZ2t41zPtaaNP3W5Pu163oN9H5azI6rt+Xy1/vV+mU6P1eEYI+Kp4iWKryqz3kegaTvureL9+qps2zqsX3v+BV1mlTPblEtoWVPupt+6tcB4f1qOJ0R7lYV+95ddto+qblE6bWaRP3rLL8u2s6kOvMehTrHbaTC7XG93Zt3313/L/vVtwt9nsxv+9t+Td/drldL1hJrcpM+14/7r/wDoVXjrXmb0e2aJF27FZ9yyVwVI856dHEc0NDQuLn9ym+2Vzt/esv8Ae/hWuV8YrslhGQSWkJwMckittdSRWdHTG751jVvl/wB6sLxbc/aDbndkgOchMDGRX6P4MXj4l4NPtV/9NTPpuHpKWYQt5/kyafRjf6LAix5Vo0Z2rldc8PpdJsSFU2/Kzb91dtpk62+lQlZWwYhvRl9v4ar6hp7pdfZoZlf5V8plTb/wGvyriv8A5KTGX/5+1P8A0tnRzXqzXm/zPNrvwfZyTM6bWb/2X+9TY9Bfb50KSEb9v3PvV6ND4bRrhv3Kt5m3fI38NOfw7PHMr20LLt/2PvV8pUxHNLlbOiNE5PRfC9sk3nQo0x/jVovlWuls9F+1W6O8Kqn3dzfK1bGj+G9rK8tzJtX5W+fctdfpvh+GS3+zfZY32vuRpP4fl+7WMq0Y7nZGjLocC3gndCdnlhG+bzPvL/wGs/UPClztaaaFkdf4lT5a9X/seHyV8m2V/LT/AFa/LVW48NpNH5m+N42f5/LesJ4qXwhUwsYnjV54XdWZEs4Wf/llI3/sq1QuNJmWPzvs67W/8er1XVPDtt9oYpZrhV2vIvzbmrkfEelvbsyI/wAi/fatadbmlymtOjKMOaRw99Z+ZI0KJH+7+aVWT5V/+KrjtatUDTIkKqG3NL5cW2u/1eZ41+R9kSv8y7PmauM8SfaW8wJwJP4mT7rV20ZHVh5csveOE1aO2hw/ysyttT5m+b/gNZrRusz5RdjfLub+GtrWEmjtGd4t7N8q7flWueW4eNvLwrfO21lfctdq5pR909ijJe6TfIsbQu6j/a27dtSwzPNGJlhXZGnzSb/utVSTzpl/ffKi/K+3+KrdvvaFNiR/e/hq483UjFRjKMjqdY8PoY5JHhkT/gG7c392uR1jwrDJsT5d7fLtr1TWNNjbfbJcyIvm7lVW3LXOaxos0bMnk+YkPzfu/wD2aumjWlL4j8wxGHhc8xuPDsMjB0+YK+2Xcn92ren28McK7NoZn+Rm+8y10l7p81xJ8+52jTbL+621Xt7OGGYwvbLjflW/irT6x7vxHH9XlGr7pDZ2Mit+5h3hvm21pWtjNuXfFkN9/a/yrU6x+TZhETa0fzfL/Fu/vVJBNMLeI/Zmf+H7lKNTmjZGkafL8RNHshbyYdv7xv7v3aFnhhYI83y7927+7Wa3nRy+TDOx+f72/wC7RcXX753R1dP49v3du2tKcb+8pGcqkTej1Z49vkps/wBrzflZaoalrlyoZ5pmZf4d1YP9oTN8kyM8rIq/K/y/7NF5ceSwT7T935fu1tGMY6GUqkuX4i+2sT3jM81z8v8ACu/duapI9SeRXuXuVTy/uq38Vc62pJHMfLdaZ/aiKrwzeW8W1XSOtJU+aFjm9tOMjdk1J1X7U94vzN+6jk2/N/s1BHMl1I9zNMzOv3tr1lzXiXEiTXK703fuvl3bWqeG6SOQvvVU+Vfl/hrKpyqBEcRKUdT3Pwgqf8KlRYxgfYJwMfV685t1dUXUk2v8/wC6jZdqrXongxv+LQo/X/QLg8fV68xhu4ZP3szsy71X92tfsHjK5/2Jw64/9Akf/SaZ9fnDTw+Fv/IvyR0+nybpo7bZmVvl2yf+hbquyXSLN5LzLu37lrmLfUn+1jyZmlbYy/N8q1fm1D5v3Ykyv8O3dX87Vuf29+XQ5KHJKJuw6m7r53lLGy/L8z1I1x9oVIUuVRtn73zH+ZlrmZNQ8yYJ9+Jm+ba+1lq39rmZv3x3rH/49WXLKUeY9WnW5fdR09vq1tDDCnzSv/e/vf7VWrHXIYX37d+75dv97/armY9Q2xxJ9xv4G3/Kv96pLfWkh/c3LeUG2sjf7X/Aay9jPp8J2RqX6nUtrky/JZwxqv3vMVvmWrWna08bF0mUhovmZvmrkI7rzJv3j7wy/My/KtWo9T8m4CIn8H8NbqnzbE88lIk+Nnjx9B8A3lzDeNHLJB5SNH8zfNXxtrV08MjfOzp975vvV7J+0J40m1DWk8PQv5dvbxbpdv3v96vGdWZJGbuq7v8AeZf9qvvcjw/1fC80vtH5pxLjPreO5Y7ROV8WxfaLUps37l+7XL6PrG1WsJpGUfd2/wB2un15d2770q+Vt3fd21wfiCOa3vGuIX5/javaj7x4FP3SzrUz3jGF+K5a8t3gm+TcwrdtbxNThVPmR1/i/vVT1axm8tkR927/AL6olErmM61vk8wQu+f9mpdQt0ulD2yKrf7NZMy3MM3z8H+7UllfeSzbn6/3qfwj5SOSOW3kKFv96nrsmj+T5WWrkkCXy70dfuVmyRvby7G6rU/EUPlhEZ2VE/3jU8bJPD84+ZagZXR/n+Wq5Rx3Eoo8zeaKocRkf3x9anm56dqiC7WWpJt7S+1TyhIu2EZjkTZt+b79XJF2qdnX/wAdas+zDsv3K0RvZN833f7tTAkgmkfazyJ81VfM+b5Eqe+Xg/O2P7rPUKqnlr8n/fVP+8T8Q9XT7mz7tO8xF3b3/wBxagj2LN9/+CpJmhxvzupBIq3Tb2AFRs3lr70s33/wqP761US4/COrr/C8if2fEjov3PvNXHq2eDXV+E2RtPEaP8/+1T5kFQ05pvMZvn+VvlqjNDvZsfKPu1dmVI5/nG7bVSdvN27H3bd1RL3dDH3JHrv/AAT4iCftW6G+/cTbXv8A6SyV2H/BU0MfjR4dIUn/AIpkdP8Ar4mrkv8Agn2f+MqtBHX/AEW95/7dZK7f/gp1bC9+Nnhy1Emxn8ORorf711KK/asu/wCTGYv/ALCl+VI5J/72vQ9U/Z58Pw6L8C/D1mEuE8y189o5P9quj1DULbTVed03Iy/xPu3f7tPi/wCJT4V07R7OZW+y6Xb2/lr8vzLGu6uL8dahc6fp+HdmmmfZuX/lnX4HUlOUpNHn+9KfMcx8QPFd5rmoNDCGeGH5UaR//Za5ePSUt7eS/vNv+wsj/erUu5kt1k+0vtdm/u0uk+Bdc8XTp+5mwybkX+FqujRn8ZtGpyv3jxD42NH5aWcybGml3bV/hWvL9Ut0VTs+Xc9eiftBW/2f4mT6Jbah5v2GCOJ9v3Vk2/NXAXVjeTR7ztdl/hWu2nGfKenT+Ey1QtWx4d0G81u+hs7CGR5Zm2RL/eb+6tVrHS5vMCOrKzfd+Svt/wD4Jw/sl3Orf8Xv8VWCtBb3HlaNayRbt0n/AD2rojR5jPFYj2MTW/ZV/ZD8SaTo9ho9hYSS67qksf2hV+bbH/zz/wDiq/WP4K/sP/D39kP4Hv4w8YQxjV7iJn3Kv+rbb5jKrf7Ndl/wTz/YRtvBOk/8Lo+LVh9nubhGewhvItrRx7fl/wC+q8p/4KVftUal8SvFMPwz8Hzf8S2ziki3WbKqxt91v++q0rcuGhdfEfPSqSxHvTPm74n67a+Ptf1jWTGTBqDSDbI2SU27OT9BXHQ2KaTp/wDZulafDbwtAqu0aqu7b/tVsW9tFaaZ9nDllWM5Zuc9c1xPjLXftFydN0e/k/eJudmT5Vr9Z8WIueS8Pt/9AsP/AEmB1RheJzMnnaheN50Nw8sm6N2+98u6u9+G3wuh+XWNbTZEvywLI3zf981B8P8Awe8khurrcWjbbtb5f++f7y1r/ETxtZ+D9JbyZleZovkWP7y1+J1sRSwVK4SOf/aS+IVh4b0u30HSrlo5mfZKsdfNl5Nc6tNJ5yMXb52krqfHHiy68TapLqV5czM0kv3W+7HXMyR+ZJvR2RN25o1r52piPrEuaQ+WUoxGTf8AEo0z7a/yiRNqN/C396vO/GGvQ+c0Oxs/wKr1v/ELxgkcaaVpiSOzfKq7vlWvPtaZAzO+7zm+bbvq6Me5tD4TJuLf7RM6O+5pN3ys1cB4/wBBfStU81E+ST+Ff4Wr0SLyvtnnTblH8FYPim6ttShmtnTO5Pkb+7XqYeUoSO+jLl944Kxu3t22/wB2t2x1TzF8nr/Fu31zdxH9mlZD/C9W7G4/g3/NXqfYOw6aW6hk3R/eb+JVqBpHbbvHP3ty1V+1P1R03qn3tlWrX5UV3dWf/drQzj7pG0b3HyOjD+41EPnN987uzf7tWmj+X7/Kv/DTZLPbcGbewb/ZqdfhHKXUr6bZvY6wsKchvmir2/R7zyPh6jv823au7Z/s15NNpPnWcV+isz2/y7l+9tr0m1kh/wCFftHMinbKuxv7rU/fIkY11fT28Oyb7uyvKviBM82ulN/3Vr0PVL5P3rzPuG/5d38NeXeILh7rWbiV33fPt3VBpRKVFFIrbqr4jYFXApaKKoCRY0Xl3x/srU6ahc7fs9nujVuy1X8z5XcnJ/2qWO6mVfkpfELlRKLG8lk3ujf9dGqRlhhUpczMf9mOq8l5cyffmZh/dqJiWbdml/dFyls6htXybZML/F/tV+iX7PTNN/wTojPUnwdq+P8Avq5r85beF7iQIn/Amr9HP2f0WD/gnWiK/C+DtX+b/gVzX7B4O/8AI3x3/YNU/wDSoH2HBkUsZXt/z6l+cT4GtZodFhZ4Zle62/NJ/wA8/wDdrNlvXuJDNNNudvmdmf71QtM7D7/C0kbJJ8ju3zfcr8dmfFe/9o3NJ+aze8mh2hvlWo7WxudSvFhh+Z5H+7VqSFI9Hhtkmw/8a16Z+zn4M0S68SR3/iRI0gh+d2kfau2nGIjY+Af7F/xF+L18JtN8N3D26/62bym2r/tNX0Ev7Mv7OXwJhhtvH/xCsbrUlVfNsbfayxt/dZq439oD9ve/8I+B3+HXwfmj0mO43JLJYuys0O35VavkiTxtr2tak+pXmpSPPI/zzMzNuolUlKPukSp825+kHw/+OnwD+HccM2m2sN1cNLul27dqrWp4u/4Kg+Hvh3o7zeGNNjiuG3M9rIisq/3a/OJvG1xptiYYbmRX+8+2uY1nX7y/kV5ppC/97f8Aw1lKM6m8hxpwUT239p79ub4tftEapN/wlXjC+ubbzWX7PJLtRV/hXateP6WlzfXS/LisiGHzm2Abmauo8N6b5MyNMjKG+WtIxjEfuRPTvA7WtnpG/ftK/f8Al+9TvEHiy/WMw280ixfd3bvl21V0Ev5K20L79v3Nv8NXrHwjqWs3z2yQsxk+9troMvf5zC03RNS1S63+W0hZ/k3fNXrXgn4bPb26zXW0Ns3bv7tdR8Kf2f7mGz/t7VbPEUarsZnrttc0fStH02TY8YMabVXZU80Sebm+E4q3hs9JhFy8O5I13M275mb/AGa8v8eeKL/xVrn2LTd3l72/d10fxK8XfaJ/sdttHzbdsbVT+H+g6Da3D63r1zHiT5kj+981R7TmJjRnH3j0P9nv4Pw+IFhl1VIbdYf3sv2ivprwfpfgDwjpkUO+H7Zubzd3/jtfJN58eLDw+zw2dyscX3d3+z/drB1T9pPWLqRUfWG8hX3bt+1qy9p9k19jzR94/QlfGHhtpt6bYopPlRfN+78v3v8AdrA8UfETStOZ7mw1ViYWVkVZflX5fvV+f2oftVa3bvvtNYmYxp/z1rDvP2ovG2oRyo+pSbG3ebt+61KPNLRkxo8p1n7aXxO1P4v/ABWtPB8OqtPp+h/v5Y1ZvLa4k/8AiVrqP2P7Gz034jaVf+R80OpW+5WXd8u75mrwrwGz65NLqty6vNNO0r7q91+CrfYdSS8s/leGWNk2tt3Mtc1Sp7OrE58R/Kf0x/sl/tFWGp/DvSLO9uWdo7VV87d95dtez33xt8N2dqlzM+5W4VVb5mr8nP2M/jxef8Ivav8AbNm2Jf3ay/dWvpi1+Jl5qkYs/t7NF5XySL8u6vbpyhUhdxPM5p0/d5juf+CiPxPs/ij+xx8XPBPh6xk2XHgHUAkjJ96ZY933v+A1+SnwB+OtnN8G9A1u5v4UH9g26SqrbpGZV2/NX6Z3lm/irw/rfhjUrzzINU0a6snVn3LJ50LLu2/8Cr8Avhv8QvEPhXQ9S+F2pTNDd+GdevNLuo1+XcsczKtfO8Rx5sMpRXwn0XDtaNKrI+vfiB8etKufOhhud+75/Mb73+9Xifi74kW2rTzXNntiaSX/AIE1ebar4qvL682fatm5dyfPXO33iS4t7r7T/aSokKbdqpur4WVacj7KnjIy0Pa/C98+rXiarretxxtHu+98q7a4342fHy51LxE9homqsbaO3WBfm+9XmmqfELXplWztr+OFG+//AHq53Ut8zM9y7Ft3ztv+9WtOVWUbSIljIxj7h75+wL4ihs/jxeXOsfZ2ims1l86T7u5W+7Xvnxh8ZjTtL13x1AuAZpLlVRuAHkzjPp835V+f+l+INe8N6out6DfyWlzD8rtvb94v91q+wfiXrMkn7LTa5ekO82g2UkpPcuYs/qa/e/ByMlk3Eb6fVJ/+k1D6XhnG06mFxClvGN36WZ4j4y+LHifxZJse/mKKvyeZL/D/AHa5+38B+Cdd8C6xqupaxdQ67avHLpFvb7fLkX/losm7/gNYl14ks5I9iTbFX7yr95ql0W6triORJpv9Z8yLH/8AFV+IfBq5HL7alWlrK5w2pXlzY3DGF/49u1vvbqfpcmpahJ5E1nvf73y/xNXT+NPh/o6TLeaPqXnSsm+eFv4WrL0fXE8O3EdzNb7drr95K6ZKlOHu+8ePUUva8sixcW+uaTb/AGx9BvNv/PRbdm2/8BroPDf7Qn/CO2/9lfb5Eb+7cIy17T+zz8fvDf8Ab1tD4h0e3lRn8po5ol/eLXvWvSfsZ6feRXfjz4XaTqVtJ8zqsSxNG38O1lrzY1MJU9ypeMkbU8PWTvB80T458NzeLfjlrlrB4EeTU9RkfZFb2aM7f981+mH/AATC/wCCdH/BQH4RTXHxG1n4J6e9tqEvm2q3mvQwSs395v8AZr2//gln8Uv2Z/Dnjy3+Hvw7+Hnh3RzfJJcNeWtnD5/lqv8AFI3zfer7rn+Knhu1uv7Nt4Y2j3fLJCqqq1yYh4Tlt0PbwuGxeElzw3Pxn/4OCfhD+0l8HPAXgnx18XfFuiyv48164sL7R9DRvKsYYYd0cPm/xN/6FX5h6LCkLGCBNkW9dsa/w1+qP/Bzr+2J4P8AiX4q+H37HPhKaO4ufCt7J4h8UNCys1vI0flxQt/tMvzV+VOn3kDats+XEn8Sr/47X2mQYOhhMDH2ceW+vqfnud1KtTMJqcuY9G+HupTabDLB5ylmfdub+7XceHfFybfk3LtT7zN8rNXk2m6hJaqyIm1WT7y/w1f8M+MMRpveQur/AHl/hWvaqfAedR933T6H0XxVDuSZ3Xatvt+ZN3/Aq63T/Eb2scU32lVfZu2qvyr/AHa8F0LxIt1dIiTfMu35Weu20fxnN5LJ57bl+V91c0eY64ylGR7PY+IIV3+VuDSLulZW2qzVqw61Db27v9tkzH/qoZJdy15N4b8VI9uYZvk/6afwtXR2+sp8n77O5FrGUftHXh6x31hrlzbzF3m+6v8AF97c1Lql3HdJEVO1lB3Rf3Olcxa63N9+Z13t97/ZrT0+6a7DydQDgMepxkV+i+Dcb+I+Db7Vf/TUz67hef8AwqQj6/kzo7K7lNpG8gZhEgXy1bkr7VdjmtpE+0+dIrsn8XzN/vVzNpq9ukjQRSEGP75WTGW/u1a03XEYzJDPHu3/AHWf+L/er8p4tt/b+M5/+ftT/wBLZ0KpKOKm13f5nV2dun2MpDN975v96r0drNHh/wDWN8qvCzfKtY1jrCWqql593Z87L83zVr2uoJ+5SEs4m+avh61OXNzcp7OHrcxu6bY2s376G2U7v96tnT7e5jj+RF+ZmbdJ/C3+1XPQ6sm1PJjYN/d3/LWhDrx+0JbQzKGZWZ7ff/7NXnSlKU+WR3+05jaaJ1mFzCn8Py/3Vaqt8u3dMgUbk/u7arTa4kLMiOpdvuqvzbaz9S162tY2mubloyz7WaR/++ajl5dipVOb3WQaps+xzXmyRPMXY6r/ABVx+uSPNC1t/AsStWvrNxc3CunnSOPKV3Xzf4q5m+1J03ec+G/5ZMr/APoVdMYy925cZfZOX8TbJJlhxIxb+Jv71cV4ksZmhkeaZv3fzO1d9qUcxm3p87/wf/FVxHiaSF43h8n5t3zfN96vVo/vdjGM+WZ534hZ5N+x2Td8yL96sKS3mhDwj+FN27Z8u6up1uBJbpdiNCqpt/vbqx7uOOP93Cm0/wAfl1304np08Ry6lGO3ePdPN5hP+1/FWhp+n+cf9Svy/wB1vu/7VNWR4YQ6WzKn+18ytWjpMfltD8+yKZPnbb8kn/Aq09/4i62JjytHockKQ4hSdZWb/lo1ZGoQySM9s+5m27vM2V0l1YuJGj+4n3t1ZOo2ryW7vchjt+5tb7tT7sZe6fE1PeOYuNNe4VXebLN/yzX5vlqhFp80amYOreZ/d+8tbC21wrIlzNMsW/5ZNvzMtFro8LXUPk2EmJEYsu/5l/3lrblhGXvHPKPu3iUrOzmuI/kRdyv+93fNVn+zXkhim3r/ALS/drasdBe3jldH3MzfN5abVWra+H4bqY74Y/l+8zS+Wq1nzRfwmdSjKJyVxpaRrJ+5be3/AC33/LurBvNPeGGP5M7VbYv8LV3+oaDDGfOSGRiyN/qW+Vq5TVLN41be7A/M3zP81dtPljDQ4KkeX4jkbyZ4WXztqLu2/L/DtqlqWouq/uXz/Cm5v4as6sba3aWaZJG3J/vVzepalNCzJsUt/Bu+7XVTjKUos8mtU5fdLv25E2uk3K/Nu3/eok1KFwdgZpNv3lrnm1rbv2JtT7u3ZV+3uplm2O+dybt23+H+7XdKny+8c/NKRr2+oOtvseFtq/6pVqza3UNqXlf5U+81ZtrJIrJNH5ixs33f7rVfh03z5Bvl3N83yt93dXHUjCUrMr35aH0F4GlEnwSjlkPH9mXPPTjMnP5V5at08d0mzd5W/cjf3vlr1PwOxPwURmiVf+JbcfIg4AzJxXmNrY7k+R921NyNH81frHjRLlyPh1f9Qkf/AEmmfbZvrQwn/Xtfkixbt5cm/equ0X3W+7UqxzPh3Zf+A/Nupmnw+ZCN6b9z/d21Z2+ZtdIliX7u1W+9X8+xnJx9w4I+7GJDJbzQ22+F1R/4f/iqns5kb7k3yqn3du1d1RyQozPjbH5e5WVm+anx2rw26PBM2P4Vk+as51JSjy9jrp1JR90kkmufL875W/iT593/AHzUtrqDzNEnkso+/tb7q/8AAapN/o/3DIrfd+X7tSWm/ck3nM6r8z7qco80IxO2NaMYaG3askkDzPud9+5VX+FqmupnsrV7l7xVWOJnfc33WrOW8RG+R2V2+/8AN8tYXxW8SRaTov8AZUMqr5yN/tV34XDe2nGETnxmMjQw8ps8j+I2uQ6xr1/qtzC37xPvN/FXm99qaW8jvHMw/wCBV0HiyZ2V4U+cK7bJGevPNSu3eb55l3f3q+9pU4xpcsT8vqT9pVlN7li8vkkZvvb/AOJW+7WFqMCXXm/w/wC1/darElxHLJsR9pjXc3z0tts8tt7/ADM/z1vymXunJ3Vvc2N9+5fipY9aQt5Nzyf9muh1TSIREZvJ5b/vmuHvrhLe+l2HaVb+5T+2OPvF3UrOzumEyQ/O393+KsS6tZIpG/dbQtalnqyN/rguV/8AHasTWcN4vyP96l8RfwmBBczW3yDpVmZDfL52V/8AZqs32iuql0f7v3/krMVnhk+R6kv4gIeFsZpXm81drJ83rVvEOoxAqwEu3G31qpPC8LlHGMUAMf7xprLnkU5m3UgbdzQWLHhm4NKykmmKu2lrQCzZt83rWhbs6/I7sQyVm25KkfdrRRt1vn2qYmMiO5kf+4p/2qgLSN8vZf4qmkjRW+/j/Z2VUkYLnY+P4fmqZS5vdFykjNs+5Iuf9qmtJGFZGT7v3KZCybmR0zQ8if8A2NPlgWQyfN8+ykoop/ZKiFdR4LXzNPZEG5t9csxwOK6TwT++tXtv9ujmFU+E3bpfLj/cyL81ULqHZ8+f4P4av6mqW8ImTd9/bt2VQmk8tc9C38NHMYSPX/8AgnuGX9qjRAX58i93L7/ZZK9Z/bp0BfEf7VHgXS5Y1McunW6yMy5wBdTH+leU/wDBPuNP+GqNCl3Ek2t71/69pK9+/aY0yLVf2t/CaSSOBb+GfPdU/i2zy7f/AB6v2jAP/jRmL/7Cl+VI4qq/2len+Z2OqalbRyXDp5ezd8it95dtcJ46l/tC8FrNMrMvz7pH+7W3c/6l3MPz/wC1L95mri4rXUvGHiZLdJt0K/K3l/Nur8Gp0+afKcXtJRlzGl8Pvhjc+ONcie23SwtLsVdjNu/2v92vuf8AZ1/YMhm+HWreNvFX7nSdJ0i6v7242fLHHHG0jLu/u7VrL/4J+/sn3/jnXLCyTTbrbcSr5q7dvlx19vf8FZJdB/ZK/wCCRfxY17w9M1vcXHhePSIm+6/nXTeSu3/gLNXv08PGjhbnLF/WMZFH8wvinXE8VeKdV8QRzM4vtUuJ4mZv+WbSNt/8d21nxx3KyKidP49taGjaO5tIS+07YlH/AAGrnkwwzDemAzbdypXGfSc1jpPgd8Kdb+KXjTTvA2iWEj3mrXUdrZqq/ekkbatf0rfsFf8ABN/RtL0nQbnxVoNrFpvhfSbe3+WD91cXCr+8kVf96vzA/wCDaT9l3RPj1+3NpureJ7BrjTPCekzavIpT920i/LGrf8Cav6CvjJ4ts/Cfha40Dw3bJbwKnziH5fM/2VrsoyjGJ4eOqTrVf7p88ft0fHt/CPhW88JeFbxbG12bHaNdu5VXbtWvy48c6ii6lePM7YkuN67n3N81fW37ZHizUtSkENtdSPEr73Vl/vfer498YWc17q8t5bRrsb7zL/FXNWj7SV5GMfgM6eV5tFmkVTuMD4BGDnBrj/DPh+FZPOd5LmX5l+5u+au503Sbi4EWjsS0k77BvOSS54/nWr4q8O2Hwst4rB5F+0yMyxRt8zK38Nfr3i7Up0MjyCUumFj/AOkwNOZLQ47WtYh8G2rTXkK/a2Xavz/Nt/u7a8W8deKNS1q+e5vLnarfLFCv8NejeLmudUhuHmmWW4kdm87b8qr/AHf96vNvEmmW1n5r3Nzt27W3L/FX86YiU8RLml8I5S5vhOWvoHkX532/w7W/i/2q4/xV4qmVja6bu86Pcu2P7q1qeKvESX15JbaVu2/daT7tcffN/AjyMzf3vvVxU/5Xsa05Rj7sjEvZnW6d33O7J93+7WLfiFVLybXb/wAeX/ard1Q7oykdsyLs+eT+9XD+PNfsNFtHgtXxK33mr1KEZOR004zqe6Zmu+KIdPjOyZX/ANquR1PxPPLlLPdjP3mrNv8AU7jUpjJK5x/CKgZscCvZp0Yx3PTp0VAGZ5GZ35NSRvtPXH+1TKK6OU0kbOn3SLGEHzf71aELPJD86NXPWMgjkXY9dHpqm8XG/lf4aOUktRK6ts37v7tacVvJIqv94/3m/hpun6akki/Jkr8ybkrYktPKVJoXXay7WWnze6YS+L3g0G1S4hlsn2v5iMu6P+GtuS1ez8AvZ3PmZjlX7v3vlrO8GyQrrH2Z9qbl/i+7urpvG32ZvCMt5Ci75Jfm2v8AdpRIkeY+JNQSOxld32t/drgJH3ylg9dJ4w1FJYfLR/vfermQDnLVJ00/hBhkcUKu2looNQopGOBxS0AFFFFVygFLHhm4NCx7l+em8sPSnHYmRaiuEjj2Inzfx1+iX7PmD/wTkT38G6x/6FdV+ce75sV+jn7Pv/KOJP8AsTNY/wDQrqv13wb/AORvjv8AsGn/AOlQPseDV/tlf/r1L84n50xk7tnf+9uqxDIkd0oyvy1T3t605ZnXPz1+Pnxso8xuTaw7TL/s/LV+L4gaxYw/Y7O5ZNyVySyOn8dL5zsfnfijluHKy1faveahM8tzNvbd95qktbpLZV/vVQbZjilE0i9GoCUTRuNRnui6Oyr/ALtJa2fmSCGY/wDAqqQLDK338VZW6VF+dvlV6v4RcvuGzpOmoI1m2LuXd8tdHosyKqF5vl/u1wn9pzRt8kzfLVjTb52z515Mw/uq9EdjLlmet6HfbrpfJvI02t/FXsvw18R/DTwCn9q+NvE9ncTL86wxv96vlttQ0q3tWmuZrpfk+SP7Rt+asDUdViumzskd1+6zS7qzlGXQrlj1PtLxt+214CgD6boN4qRqnyL/ABV5r4w/au/4SBX8m/bDJ91flr5wS4ST/XQ7v71Ss1mql0jVWap9n7oRjE9Sb4oaM159tub/AHDbu+/96mXnxSs7iZPs1+sQb7+1/vf7NeTNePHI3yL/AHals3825Akfcn3sGrgOUTuNe8dPeXAh3rs/urWReeJPM3/v2X+H71YU198v8P8AwGo/Odl42/N81Ll/mJj7ppnVHbKbtr/epJNSmjt2S2mbe1UIrpyu/f8A8CqW1vPnZH2tTCXunrXwhjabw/Dsdd6/e/hr2z4c3X2dvM+Y+Wm99qbtq14H8FdSddLkskmYlbj5VZv4a9r+Hd463ywpuCTLsb+GvLrR9/3jz8RH3j7x/Y58ZPJDZwojSIr7FVV2tur7g8ByTXlv/plyqIy/Jt+9ur8z/wBlvxIlrqDw+cybvL+WOVvmZW/u193/AAl+LiQ6ampWEO9422SrJ8yr/tba9LA1vdtM8qpTlL4T2zwPpOsf29CsNyyQrcf6xn+8v+1X4W/tqeCL/wCEP7eHxg8GeT5cbeL5L23VflVobj94tftp4d+L81nqx/sG5hieaJt9xJ8ywsy/3a/M/wD4KsfC1Na/aw/4Wp52+HXPD9vFcXjRbfOmh+Xd/vbanNPZVsM4HpZTKdPERTPj/UtSv9vzp5RV9u7d96s+4k/cu77Q7fMPk+9Xd3ngHUNQuBYaPA1zMzf3P7tc78RvDmp/DB9Li8d6NdaU+u2bXmjNfWrJ9qt1ba0kO77y7v4q+Jll9WpG8In1Uq3s5ayOcvI5reUvs+Vk3fNVNm2sN6b1hXc7N8qtXG+LPjpZ6XI1no9q1w6/K8kn3a838Q+PvE3iOeRrzUpFjkP+pjbatdmFyWvUj7/uoyliP5T03xJ8WtB0e4ltoU+2T7tu2F9yr/wKvtn4mXIuP2LlvHULv8K6c+30JEBxX5j6VuOoR4Xdlq/TH4s7rf8AYdIjxlfCWnAflBX9BeE+CoYbJc9jHrhpf+kzPpeGqknhMe3/AM+n+TPiOz8aTNceS9tlFl+WRq0rPxwin76oN+3bXC/PDcNs8xPn/ibctXoWdpNiP/tV+OyyvDVN4nx9PGV6fwSPRbfxNNeL+5maV/4/9mqlxffapPs3nfMrf3v4qw/D+pXNvKqCH5G/5aVZ1iz8mZrm2mwu/wCasKeS0KctDSpmVWUfekdn4A8J+M/FmoJp/gLR7rVb9tzxWtn80n/Aa0tY1D4x2M7+Htb0HWra6t5dz291YSb93/fNcx8M/iN4k+F+uWHjzw9eSQzabeRzqyvs+7/u19p33/BQ8+MPDFlr1neTXVzdf8fVrbwK0kn+zuZflWvXwPC2VZi7TfLI8XH8SZnltpUo3izK/wCCd/7QVj8F/ii/i34u6DeaUsem+UuqX1u0UTKzbtys1fTf7Vn/AAXI+Hvwz+Hd7o/wQ1ux8VeMb61b+wbfT/3lrp7f89p5P9n+Ff71fFnxq+LXj/41aLcaV4h1W1s7a+t9iabY2+75d3yr81fPHiX4d6x4Lwtz4emtrTbuVvIZV21lmfh7Qy+rHEKfNB/ZO7L/ABEx2YUvq8klIdrXjDxh468Ua18SPiJr02s+IvEF011q2pXTbpJpv/ZV/wBmqMbzQ6kroihG/hb+9SRxPGreS8bPv3f8BqPd/piQoiu9aRhy+7EzlOc580jo7hvJ0+W5dG3bf4q5fRdceC7ZN+5d/wDC3zVv3myaw3o/3l+fbXCrcwrfMj/K+9vl+7tp/EaUdz1Tw74k/eJDI/y/3m+9Xb+H/Ej42CZWeb5v7teLaHqnkyBw+3/a+9XZaPrUqtsdGdtn3v4aylR5jo5uU9e0vXHuIUm+aJWdv93bXV6D4kd4US2mjRG+bzJH/h/iryXR/EMMMiohYMybnb7y7q6PR9QgaFPPfJZPnVX+VazlR/mHGp72h6rY65cySCF5o3Vm/wC+v7tdp4MvzfJckk/Ky/J2Xr0rxvT9ciWZNkylFRlb5a9P+EMolsbt1nDqzoUx2HzV+geDtOS8RsHLyqf+mpn1/CdTnzqn/wBvf+ksl1C6a31e4isZ1QGbfcFV+YjPNaunatuuEdNuxXbdI23/AIDXMa1Kttrt3LNtIaZwGZ+nPTbVq11S2jmX/Vh22s7bP++Vr8x4rp+2z7Fxf/P2p/6Wy3W9njpv+8/zO5tdV+0XDv525m2t5i/8tK14dUhtLj9zC277yNv/APHa4OHWnjYPbPslmdt7L81WYdam2pHDfyF403N867mr4zFUfd5Ynp4fGe8d7b+IGhuInR97bP8AU/e3VpW+tzMxhjm3bvlfy/8Ax1a85t751VJppv3X3maT71a+k6oiyeZC7Mv8NePXw7lVPVp4qMtUdlJrVzMu93VJV+Xav96qt9qUMcfnTfN/e8z5tzVi3F0i3m/ZvCoreZv+8v8AdqGS+eONdu3+981Ycvs+Y2lU5pFjWNQeNvOTy1Zv4Wb5l/3a5241KaaUP5y7d3zNUt/qSfZ5ZJn3bW3IzfN97+GsDUr6GOHY6KvzMj7V+6v96tKPNLcunUjEmvNUjhjcu8aDzflZX/hrm9evbaGxdH275Pm8tvm+aodV1yGON4bN2x/Hub5t397bXJeINcmvpjZpeRh1+ZpGf5m217GFoy5jmxGI5eUr69ND5zwQ+X+7Rfu/Kv8A9lWPJH9ouHTdkt91l+9VbUNagupC6bf3fy+Wr7mWqf8AbTo0XzfumfdE0f8Aer144fmjGxH9ocupuwzJDb/fYoqf99f7ta+m3CR2apMm6JfuR/3a5eC6eO4KO64k+bd/drWtb6OTa7vJ83y/NVSo8vwkVMzjOWp7hcWc0cju+0/N/vfNWbqmmpdW/wAkPHlfvdvy7a2lZxcP9m8yFW3Inzfw1JDb+dK6eTuRlVX3fd3V50pSjqZxlCRx3/CMWat9pSSR/nX5qn0/w6i3Hmw+d8v3m27mbd/erp20/ddeT5Me5m/hrS0vRdzNv+R12/Ky/LJSlKIcq5eWJiW/htI2/veZ/eX5t26rj+GhZt52xcM/zbq6eGzRdjmRS2759zfdqWTTpreGSZ7aMvN8rrG+5VrQipT5TgdQ0Xy4dn2bZ87b1ri/EmizKsvkptT5vlX/AOKr1PWh9njWGGFVZk+6zbt3+1XEeIoXmjdPJ5b5vl+61XCc46nn1ox10PGddtPszKjovzfN8rfLXD63ZvNcPNav8sb/AD/P96vSfFVi6q/ksqCNvkbyvmrktU0lJG8t/wByW+438Ne5h48sOZnzleO5xMNu8f79PmG7czSfw1oafcXUm77TGzL/ALX8VWptNmWTyblFYNS2Mc0jvbTOuF+ZW3V3y5ZHDL3eU0LG1875NjRIybt275VbdW5odpc3UyQud6t/y0rN0+3DKba5dj/fX+Fa6rRbHy1S2hZW2/d2p92vPqctM76fvHsXhG1nt/hGlrIxaQafOCT3OXrzq3tYbWNfs0G12RW27NrV6f4ZTyfh0kcZ+7aTAZPu1eeXkUN1dDzplj/dfKzJ95q/W/GOi6mS8PSte2Ej/wCk0z7LN5RjhcL/AIF+SH6TshbyURiWb5W27VWmx2pt8Q7Msu7aqp97/eo+0Qt8kM2x2/h2/NU8Pk2wKJNJuZ1bdtr8C+rxjUPMp1I8vLKIq6bNNtd0V327kZUqG6jLwjfOzxsnzqvy7a0lj8uOWG26/K3zN96s273xsYUuYyW+9Ht27aylQ5feKjWjTK0kjwyJ86o2z7u/dVaPVolYpCjff3f7zVV1K8CSMIUX5trP8vy1lw3ztM2xF2M3/LOuqnRjL0I+uSjLQ3o7raxuUkVE3fdb+Fv/AGWvNfiZ4k+2axtd8RKjKu1PlZq6nUtSh0/TZZt8jMyfIrJ81eG+NvF1zcXU1zNKy/3Pmr6HKcHGnKUjws6xk6lJQKmt3TzedNbTZ+bbtrhda3rI3zrvV62rHWHaN33s27+H+7WJr0yTS+d/6FXvQPmZGb53+3y1Tw3SRyBN/Lfe21n3Fwkcfyc1TivEkmZxuDr8u3dQUavijXktdNeKGZt7LXBzSSSSNMXyzVratcSTN/u1msjt1StBxlcrZOeXY1Zs9VubOZXSRtq/w1C0Pl7eflamsh27kWpkafEbsOuJeK6TIuGqhq2n+SouYU+RvustUPnUVpaPqkKt9mv/AJ0b5V3fw1IuWW5mxO8Mnmd60murbULEo8aiZfuNT9R8OTAfarSZHik+ZdtZcgmtpNjqytQP4huHVvnopWbd2prNjgVfMiwUYWlooqAHwLubIq9bsnl799Uo1/5Zn+KpoWRW2P8Awv8AxUTMZE8kjK3/AI7UEyoy79n8dLNJtb5JN1I0u77+3/gNARIoup+tNkG3kvk0rYx8lMf7xoKEooooNBH+6a6T4fyJFJNvT/gVc2/3TXRfD+VFu33pVx2M5fAdTqFv5kO9H3fw1k3Vu/nP/s/N9yujms0ht12bfm/iWsi6hdm3u7ZpfEc56t/wT+jK/tSaAw2qDa3vyr/16yV9O/HpYNO+OEXiG5jUiPwnFBGf4gz3M3Svmj9gGJ/+GntCfbwLW85/7dpK+i/2tL/7F48sI1KqZtJjBO7BIWWU4/Wv2XB+74E4v/sKX5UjixH8dehgnXLm+mM00PyLEzvGyV7L+wP+znrHxe8ZQpJpUnk30qv+7Ta0a7q+cobua4ki01LlovOlWKWRX+ZV3V+1H/BG/wDZR03/AIQ3S/F1h5awwzxw/f8Amb+KvxvLqVKVTnkeViXJU+WG59ofsb/sX6B8FfBNtf3kMYnmtV807fm21+WX/B2d+0XBq/wO8N/B/wAI3Ey2OqeL4kuvLuP3U32dWb7tfsp+0p8X9E+FXw51C3h1SGG5WxYBWfDKv3a/mq/4OAPiJ4Y8WfF74b+A/DepXReGyutUv7WS682NZGbbGy/71d1ScqtPnn8jvw+Fp0K8Yw6fEfBun2M0caP5KudnzVKghkmCX9hu+b5dtaVnZeYq/N8rfw/3qsx6LukCI7b91cX2z0JW+E/bD/g028Gy2E3xW8XxQxxQNolna+dt3SRs0jNt3V+iP7R3i5LfNnZzKFj+RGX7tfnJ/wAG0PxUtvBfgX4teCby8hRrrS7HUUZfvK0bNGy/7vzV9gfFL4oWGrXks1tC0vnL8i+V/wCPV20fePDxMeXlPDP2gpvtVnNqt7M32nfsVv4VWvEdB+Eut+LNW8mzs5EST7snlbo46+i7vw3qvxA1SZHsNsTf6pl+Wovjd8Sfh1+yX4PhtoJIZvEF9Fs07T12yTs2370n+zU4ipSpwvMy5XzaSPkrx3oy/DX4ny6XcwmUaVcW7yR8DfhEcj8a888ZeNte8VeIpvE+sCNrmZ22Rt/yxX+7XQeJfFuteObm+8X+IJS95emSSYsPqAPwAA/CvOtU1CG1jm/fZX7rfP8ANX6P4z1H/YXD774WP/pNM1+ymyO8WG3Vrm5uYUXbu27/AJa8O+KHjD7drDw2c2yPbtWFX3LurpviR48RbR9K0253vs2quz5dv97/AHq80j02a+unuXVvm+bctfz1GtKvsXGXNuZt2yXErbLrG5t33Pmps2ivGz3OpXKt5f3P4f8AvqtSaztrWF5rmFTt/wDHa4jx14uKwulteRpDv+eT+9/s1vGjE2jT5pmP8SPF1nZRultMoVvmfb91a8R8R65c61fPLJMzIG+TdWh438X3OuXjwxTN5StXPKMDFe9haHs4XZ7VGl7OI1V3U5V20Ku2hW3V2cqOgFXbS0UURAkVvmyP4a3PDt1I0gT/AGq5/cfu1e0e+eGZE3/xUpRIlE9Z8O25WFfuhvvL8n3atX1h+73iHd8vzSfw1neC9U3xo833W+Wusks4bhfvsibfkqvscpjKJx1nvt9W+0oigq+5GWuj8aXv2fwSXTbhn3PJv+ZflrD1axfTZvMhh+VX3basa1Nc6t4BvLOGHbtt2dt38O2oJ9n7545qN295cM+eP4ahjh82THrTWOFr0r9k7wn4S8dfHXQvB/jOwkubC+uGSeON9u75WoqS5Y8x1xjzaRPNmBXgiivsX4lf8E6NB1Oea++GPiGSwLXDCKx1D5olX/erwjxj+yR8b/BzO914PmuoVf5prH94u3+9XNSxmHq7SNp4WvS3ieY0Vf1Hw7rWmStDf6ZNC6/eWSJl/wDQqqfZbnbu8lv++a6ozRhcjop3kuv3kxTeAKQuZCsfmz6UlFFBQrNur9Gf2fP+UcSf9iZrH/oV1X5y1+jX7Pn/ACjiT/sTNY/9Cuq/X/Bv/kcY7/sGqf8ApUD7Dg3/AHyv/wBe5fmj85k+8KGG00lKx3GvyL3T48Siil3fLtqSeZCUHPeiigdkSK3ylD96mD5l2fw0csv0o+98iD5qBRHrzt/2vStKyVLWHf8ALtV/mqhHCjf71TXV4qxeVC/P8VVzESVxNSvjeXG/HyDov92qrOQ386WRm3mmVIy1bs8ak72pl1Ih27P7tQq2T8v8NDNu7VXxFcrF2D1NWbf93C29P4Kgjbc3z/eanzSbcIjttqSZIduRVxu3UrNlV2cn71Vy20kUsTMrbw/NAFqbfCn38j/ZqLzAv3Hx/fqNpy2Pm6U3zB/cH50Adf8ADXxA+l6wltv2pI/8X8Ve9+CNatm1S28l2c7/AO592vly2umguUuU3Eq33lr234X+LIdUhhm+04dU2uu/5lrjxlPmic9anzQPrv4L65c6Lr9lfvMu2OX5W2/LX1V4N+LFta2ahLnaWdvmZvlkX+LbXwT4J+IlhCI3v9VjhRf70qqq13cX7XfwF8AWq3/ibxrFd3EL7fsNs25v/Ha8b2uIheMInlexq8vwn2w3xo+15fTUkb/Zjf8AirnNU/Zr1v8AbmuLn4Y6V4wh0bxxHpdxP4Ih1BP3WpX0a7ltWZvu+Yvy7v71fGXij/gsB8OPD6TWvwy+Gt3Kyrtgnm2pHt/usrV5P8Qf+CtX7SHjG4SbwTBZeGp45d9reaeWaeFv4WVv4Wrow9HH1JxlKBtSw+JjNTXun3/+w/8A8E6/ivD8QbzxP+0/pWpeCfD3g+Ka7+Jeva5b+Ra6TYw/NLGrN8skkm3av+9XwF/wVJ/bw1r/AIKA/tm6n8adA03+zvBmg28eh/D3Rdm1bPRbf93D8v8Aek/1jf71WP2pf+Cq3/BRT9sX4b2HwS/aP/ar17XvDdjbx/atFjSO0ivmX7rXLRqv2ll/6aV4HDEjQ/PCq/Jt217kIxjK6iepzSUPi1OV8V/NqDzJ0Z6y62fFUSRXHl7MCsatTSnIuaDG8mrQqn96v0m+Odwtn+wnNPKdoTwppuSO3NuK/OLwbZ/atchR3xtfdX6JftJyGD/gn/eyKenhTTO/+3b1+veGH/Ipzz/sGl/6TM+v4Y1wmPj/ANOn+Uj4WWZLiH5HXbVmxjjmkZEfdtri7PXpIVMPr91j/DW5pesfdSN/95l/ir8dPipROphRFwmdyrWza2qX2nvbTf63duRq53T75LhhMnH9+uhtbh1nWG25Vk+8rVpT3I5oX5ZEcMf7uXSb+HI2fe317j+y5+xz+1T4806O58LfDe9bRr5mlg1CC3Zo9qqzbty/d+VWrxq7s+ft9sm14/4f4f8Aeav3K/4N7/8Agqh+w/4c+Alp+zN8bfENt4V8ZPc/2fK+qhVs72Nt3lMsjfd3bq6cPjfqVWNSx52PwksbS5Iux+Qmv/tTeAPh2raR8P8AwaPEGt2dzifULlP3Uckbf3f4vu1+1v7J/wAPv2IP2zf+CW/jLx/8btM8Pt4gtPAd9qN79h2pc6XD9lZlby/vKyyKa+Mf2TP+CWi/DL/gqB4ttfj54GhvPhvdeJLi5t9Us4Fls2t5rhvL/e/dX5WXb81fVX/Bej9mz4Z/8E7v2XNc+NP7Jvh6405/iFpyeCtUt7eTNpZ290dxuN277zKrKq0sfmlfMa0Vz/CceCy+hgY88Yb733Pwc0FU/su1/wBJmcNEzeZ/eX+Gq02oPF4khttn+si+fbWja6Wmm2KQ9oYtm5n/ALtcbpOqTap463o+7a2xPn+7WcfePZR6T/rNNJ+9t/u159eLt1B3TdnftavQ7dvMsf3L7tytv2pXGXGmus0yb87Zdzt96spbG9GPvO5DY3j+YUT5GX726uw0PV4FjVJpm/3o65SOF4mRNnzrWlpsvk3B+7/wGtYxHU909B0nVE2q8L7i25dtdHo+oTSMqI8bIz/e3fNXnljqvlwhERmP8ddBo99DIqwsnlbfut/DUyp/aM41OWVj0Wz1gOyfvtu379ez/s8zRz2epvHISC8J2kY28PXzrZ6ttkZH2srfd/2a91/ZRuFm07WVA5EsBY7s5yHr9B8IqfL4gYR+VT/01M+u4Pqc3EFJf4v/AElkuvarAfFl9aTP928kC5X7vzGrH9uWklqnkuqP9193zNtrhfHWvmx+IGrRm5XZ9vnBU/7xrMXx4kcfyTr/AHdrV+a8T4WU8+xTj/z9n/6UznxOLgsZUj/el+bPSrfxA8PmbH+Rl2o0f8NXLfxZbxqEeaNGX5V+626vK5PG32iGKf7Sp/2Vaj/hLv3b7IV+V1+6q18tUwfNGXMa4fGcp7Pa69C3lvNNGV+9LGv8Na0fiKS1d4d/3fm2xv8ANXiOl+LplLbzJ8z/AHWbd/wGtuP4gJb3D6g9z9odk27m+XbXjVsHyn0OHxkJQjKx63/wkieWfkkiaHavlt825f71VdS8cWyyM8J2Bd3lRs25tv8AtV5n/wAJ07Ls+0sf3XzbX/h/iqje+NvMRJhMpSNdr7vvba5I4Pl956nd9eh0O/1DxY/lvczXKoNm7y/4v93bWPqviJ2jR3mYq3zOy/K1cNeeLnjkFtbOvzfL9371Zd94svW3Qo6u/wB7dv8A9WtaUcDUlyyPPqY/llY6PX/EE2353w+7564nVPFFzud98OPu7f4t1UtW8SujN51yu9v7r1yl9qzztLDDMqn7ySfe+9XvYXCy92MkcGIzE2pNc3SNc3L4Xf8Ad3fxU/T7pLiNn3qvzfeb/wBlrkpr2ZW2QuqKvzMv3t1bGm3k0j/I/mps2o2zbXrewjTieX/aHNI7OG+huoVT7Mvy/fVv4lq/a6gkeZHTytvzbWTcq1zelyTeX++uW3b9v3K1luLqTcnVt38X92s6lGEYF/XJc3NI+kIdQeSRHTdsV/7n3lrQhkST95cou2Nlbdv2rXDWviCaOEO/mOjPsSRm/eLWzp/iAyTfutzRrxukf7zf7S15VbByPbw+Mpcp2NjdObjzvJhd5v8Almvy7V/2a2LWRLdmk35bb8y7N23/AGmrkNP1q5dv+PlVWNvvN/DWjY6lbLIs2xk27v49u5qwjhPetLY6Y4vqzrIblLqM3CQxu6p/47/C1VppJWZzbNhmVm/efdZqrafqELfvPtmw/wDLWqV9qz3Tf6HtUSfdaZPmpRw3vPlFLF+7qUfEW+FWzMrlov8Alp8vl/7NefaxJ5Nr5kk292TZ5i/w112qXjtepO/l+XH/AAt/y0rn9WgSWGSOF/MCuvyx7Vruo4flPNrYiMpSZwesWsMl0z+Y37yL5N38X/Aa5rWNOQRlIbZijbmdv4d38S13Wp2e2Ty327V+Xy2+9/wGufvtPnWTYifOzs37z7telGjGR5NaS2kcLfWqeXl+GX5tv3WqmbflEhRc7d3mL93dXT61p/2xm2Qxuyt97Z96s0aX9on/AH0PzRv8+19u1q7Y0Tz/AGkuYk8O26bd95w6/wDj1dVo8CQzfvkY+Z/t7flrJ0fT5ftHzpy3zbfvMtdNp8KW7ZebJZsrtT5drVjWw/NO5tTrRien6CVT4a5hQ4FjMVU/8Crzu786Vvtlzt2/KrtIny7v9mvR/DP/ACT5MNn/AEWXlvq3WuN/s3zMJC6hfv7mT5a/X/Fmk3kuQX6YWP8A6TA+yz+rbC4N96a/JGVHap5i+cjfL8y/JtVv/sasLN/pMW+bdGyfLGv3d1LNYTNMtz9pVnVNvzfe/wB2mLb21r8m/wCVvk2/7W6vxGpheXU+a+uTHTfafLmlRGQLt2M33W/vVR1C+hWH7MHb5X3KzfK26rF95253SFX2vtl3P/D/ALNZWrSwq+x0Zzt/5af8s6qnhf7opYozbr7ZIpSGZdv3fm+6y1HY2s00n2Ysyfxbf7tTxxwwxvsmX+86tVm10+2kk89ptkzRb9rfdrf6qowI+tHMeOmgs7H7Nv3vJuVPn+avAvHGmvZ6hPbdXb7+2vZfih4mtrbXrPRPOjQR7mdpP4mrzL4hx2010LxJty/eZY678HTjTieRjcQ61TlPOILx7Wb+L+78z1T1qZ5GD722t/CtWNZmh8xnRPu1lX115kY2Phdv8Kferq5eU54lO4m8z50+U7qpSSPv379u75qmvN67kfd8v+zVCQ+Wdm9tqtSFH+Ukm2Mx2Ozbf4abHEWX/b/utUDSN5Z2fK38fz1Pp7edJ9/5v9qnGRUv7pXkXaNjpwr0zenmBNny1b1W0eNVd3/2flrP+dGHyUviCJJJb7t3l/NVdkZD861btZOf3xxVqS1SaFUoDm5SrpOsTWVwm58p/ErVtalp+la1Z/abOZUk+81c/eWZtmHerOl3H7l4XnxVRlylSj9pFCaF4pWhz92ihv8AXH+KijmNApsnanUMN3WpAVWx9/mpF+Zh3FRqu72pyBOfn7f3aCZbkzK6MPN5Vvu1EXOA3y4oZn27KYx+bPpQSDH5s+lNf7ppzL/t0BS1BoD/AHjSUUjHA4oAWt7wDIV1FzvxtXdurB74re+H7/8AE48sorGRNvzUES0iehra7bOLhtrP96qV9bpHNvG3C/w1oyXUMdr5OzezP8i/3ayb5nf7/wAzM9Bzx00PVf2EFiT9qHQvKxg217nH/XtJXu37ZMhh+IOlzl0GNGAjyuTuMsleA/sF3DyftU6ChdTm0vdwXt/o0te8/tooJPH+lh1ZlGjjAX1M0lfseGbj4D4u3/QUvypHBiJ/7RfyOF+HSwXPiK0e5+ZvN3bdu77tf0Of8EmNF8WP+wRF46+GTWf9t3sszWrasVSFpFXbGq/3a/ni0OH+w7q2uXfyp2dd0bPtVVr9ef8AgkZ+1Lovw5+DlnpX7Rmq3lh4It5ZLiy1KO48uO3ul+Zl2r975a/FKWIq0o+5ExjThKr755/8QP8Agop+0V8XNU174aeJ/A1jd6w3iCazv7e6vGVrdoW2su6vyP8A20virJ8YP2zvEusJCttbaWy6Xa28b7ljWNfm2t/vbq/XHxB40/YM0z44ax8e9N8bX1zDea9qWoy2MkWzdGysytX4h2mtW3i74j6/4th3GLU9burqBpPvKskzMv8A47XoSceSJ14eNRc0pHTxrlvsybXP95VqSNblbxETckX3tzfxVNaxvGq/PlW++1S6bp/2zUmkfbu/2nqfdLlGMT9LP+CEeqXLfFDxLo8MO3+0PAcyyqv3ZFWZfm+Wv0R/4V3c6lceYnmBJIvmj2fdavz+/wCDeNbCH9ojW7C/v42iX4fag3k7vu/vFavr39p79udPDX2zwB8FvLmvIf3V5qkafu7fcv8AC38TVvLERpxPGrx980f2hv2mvAH7MmkvonhLTbfWvFs0G2K137Y7P/ppNXwX448ZeJPHXiS48YeMNYk1XU7p5HuL6R9yx7v+Wcf91a1PFFxeXuoXGpalqsl5f3G55by4ZmaRm/2mrzjxJ4iNnILCwm82Xdu+98sa/wB7/ar53FVp1J3kClGXwnS/axD4WlvmXaI7WR8DtgE188+MviBqupXFxbWyKieay7o5f9Zur3eOaeT4a3MzMryHTrg5HQnD182yxpYyHzkV32bmj/h3fxV+veNMZSyPhtL/AKBI/wDpNMdpOSsVF0r7Urpf3O2JdzPJC275qp6tfW1vG3kusSLEy+X/ABNS63ryWy744eG3bI9//j1c3q11NJbx3+pIrK3yo2/btr8Lj7vum0Y8xl+KtecWro77Itm7az/M1eF/Evx0+r3j2NmyhF+Vttbnxg+I3nu+n6bdNu+622vMCWLfMcmvYwOFly88z1cLh+WN5BSMueRS0V6vKd4UjLnkUtFSA2L79OpFXbS1XxAFPt5HjkD/AO392mUm4qwokB3Xg3XHjm3u+dv3FWvTdP1B7yEb33btv/Av9mvDvD999nuNm/FeqeDNWeaNETafn/ielH3TmqROh1TRzqlk3+h5K/xf+y1k6bCn2O50yb5PMRo/ufw12tjJItizvt+b+Gub1zT3t77fZ/IG+Zt38S/7NXL+6KmeAataGw1Oe06eXKy177/wTr+H2s+K/jta63bR4ttLs5rq4btt27a8d8bacbnxncw2y8SOrbq/QX/glD8GrCL4S678S5kbfeaothYfL8skca7pPm/3q8/Mq31fCyZ6ODUZ143PRpPDMdrbx74WYb13sv8ADVy3sZrSGSZJt6/3VT+9XoWoeDXa+GYY1XZ/D93/AL6rOm8P2dqpt0tmMi/LEv3lr42o5z5bH2mHnCx5V4k+HngnxJH9m1Lwlpt5u+aVri3Vmrz3Xv2T/gVqrb4fAclqzbt7W9wyt/3zXvl/oLqqbLZUSN9u1v7v96ua1rTYYbh0O6Ir/DG27d/drSjjMQrxUth1MDhanvOJ8zeJv2E/hdqf7nRPEmoWMn8XmKrrXlnjL9hnx7pe+fwxPb6lEqfOqPtkZt3y7Vr7M1DTUt5GjdF/22X+Kov7Ff8AcokLI+zd5n97dXVRzTEwd5S0PNqZJhpS9z3T84vFnwk8eeDLw2fiHwreWx7eZbttrBk0yeFtkylTuxX6dT6PBHIXvLX7RuVfluolf/0KuW8Qfs//AAl8XGVNb+HVmC3zy3FunlSM27+8texRzilKPvHm1Mkr/YZ+dL27xln2fdr9F/2fQf8Ah3GgPX/hDNY/9Cuq838YfsGfDfVpJpvCWvXmnPu/1Nwu9F+X/vqvbfA/gC58C/sXXfgBrlJpLbwrqkQkj+628TsP/QhX7h4K4ujic3x/I/8AmGqf+lQPe4TwtfD4yv7Rf8u5fmj8vyMd/wAqGXdir13ot5azPbTQtvjfa2KgksblIw7wt/wKvyc+GUkQUU9oXU/PTSpWgsb/ABr9acu/HFGxvSjlTQT8Qd/nzQp2t8lJTQS2aCiTzvL+6cUskzSSM/8AepjDd1ooFyoVvmYmkopeWNBAsmVfikX5fn2Zpu75sU7+D8ar3TQX5Nu9P1pJm3/O4o/hLUYVvvmjmARVfvT9ybt1MBxyKEVzUi3Qr/eNCt/B0/2qMfwfxUHIBWq+EXMxY1zz61d0nWtY0kv/AGbctGZPvtVEsW60cqakSjzF/UtZ8Q3Ehh1DUpnPdTJWfuPIY8/3q0bXUklhFtefNt/1Tbfu1YXQnvJPtNnfwzIrfxPtb/vmiPILm5TH+8n3/lrY8OafG0h1K7Rtkf8Ad/vVfjsfD1nb+dqUMbO3/LOP+9UI1I3G2GzTyoV+7HVSJlItWcj3UzS/wt9/5614dn+p34+WsjTV2zfcU7f7tdFY26SR4RMt/tVUfeI+E47xlvWSJN/zL8tYVb/jtUjvhGm3b/s1gUG1P4TqfhfavJrC3Ozcq1+gn7Q9m17+wXdWi9W8LaZ+jW5r4K+G8f2azuLx32BU+Rq+/PjBcRN+wv8AaZMFG8KaWevqbev1zwufNlOd/wDYNL/0mZ9dwt/uuP8A+vT/ACkfm9d+H7yFm+T5f722qhW5s5G+dlr0aSOzulKeR/uMv8VZF54XS53ZTYrV+S8sT4mNSX2jC0zxLcxzLmb/AIE1dr4f1hJsbHXaqferi9Q8M3OnyF4UZlX7tLpOoXOnsu+baq/7dSVKMZHsdvdQyWYh343L/laqX9tYXUL2bvsX7q/3qxfC/iK1kgRLl1Zv71b9wvnfvkO7zH+Zv71ZmXwnNeI/2hvj9baTF8MYvjV4sXQYbhZYtI/t6byEkX7rKu7+GvozUv2v/wBrf9pb4S+Evgh+1L8Zda8ReD/DN59o8L6PcN8vnN8qyTMvzS7d3y7vu18vfEbR3juItbttqmNvnr9lv+CMvwF/ZC/bk/Yh8SfCXVdEtbbxjpOrW+o3HiSaJmlj02P5plX/AJ57fu/7VZVYxX90qpz+z90+Bv2qPhH8N/hH+yroPxOsPiFZt4q8QeI5rVPCKwN9pt7OFf3l1N/dVpNqr/er5T8AWV7f6u1xbDLj59tfv3/wU2/4JZfsjXH7IMfj7TfHepa94r8RWi2HwqtrOz2NIy7Wbf8A9M1XdX5z/sT/APBJP4tftDeKNUs/APhaS5n0fzP7bkvt0UFuse5mZmX+FvLatqco0qW9zjhWlL3ZqzPn2z0/UtLUQXkLIZIFbaybW21TtdD+0NI/k7R95K7/AOOXxWtvi58VG17SvAum+GNP0/S4dI03w/pbsyRx2+6Npmkb5mkkZWZm/wBqsfR9P/0V5JkUFn+796rjrHmZ6OFlzfaONk0HypPnf59/92o20ncrOm7d/u13lxoaIp875Tt+Vtv+srHk0J45G+Tb5j7nXdVxjyyNKn8pjW0bwrvmf+Kte1mfzN/+396mR2KQj54W+ZPlX71TW9juk+fdtj+5urblhI8mo+SoaMOobV2O+1f9n+GvoT9i68NzZ+Io2X5o5rYMfwkr5yhj2szp1b7m7+KvoT9hwyHTvEhkj2/vrX+Utfo3hNC3HmFflU/9NzPruCK3PxFRX+L/ANIkeX/GvWZLf4peIAjNui1WfP8Au7zXLf8ACWPgDev3KvfHNj/wuDxKqO2H1mdX/wBn5zXGMrxtsRMqv/LRa+Gz+nH+28U/+nk//SmePjakv7QrR/vS/NnRx+KppFCPCrKvzfNVy18RbrlZt7f3nrkFun8zZCG+b5mkWpIb65X99vZVVtrL5tfOVMPGXMXTxEonb2/iZI5N6TMFbcu7dU0Pi5BHs85TtfburjYdWRWT54/9U33qgTVJFjXhf73y1wVMHSl9k76ONnH3Tum8YTNIro7MnlbX+ek/4Sgbhsm+Vv8AvmuHhvnaUoX3M1WIdScrseZlCv8ALuSsY4Hk91HRHGc252MniR5FSbepC/f/AL1QXeuPNb/J8jN83365htYRoh5Zb5n/AOBVDcX03khN+fn+9V08HGOhz1cRKW5qahrEzfOdr/8ATRv4azrjVHuJNnyqf7y1Ukn27nRlLL/tVVWZ5Nv3t396vRp0fsnDKtOJoW949w33N38KyVv6PvjjWFNrrs2v81YGlwu8ez+NvuLXQ6LDcyPskhwsf975fmrSVP3TONSR0GnrNHsT5l+T51atu3t5lZEhdkOz59v8VYmmvcwxvDcpGdz/AHt/zVt6WzwyJNtY/P8AxfdkWuSVP3veNY1pHpl59pi2TPDsWTds+b5asRatNZzb0vGEWxWZf7zVl3urL5LI7qQy7kZU+7WXHq03nB4X2lf71aywvMdMcVyneabrX7tLlIWU7922Rvu/7VdFa6pHcxpN52/zHZXVfvLXmtjfQ7Yt8yt91tv8P+7XT+H/ABAkbfO6yRN8yKv3VasZYOPNsdMcZLuegx3UKrG7vIjt821f7tQ3jJJ87ybGV/k3P/DXOWurQ3O+Ge8kd/8Ad+6392lvtedo1SF2jf8A2ko+reRtLFR5CzePNqcnk+dt8tdibn+Vqz7y38uTGxoj95P7rLTmkdfke53Hb87SJ81VtSuP3aQw3KttlVWXb81dEcP7pySxRl6h53mHydv+q2/vE+7/AHax9UheFUme5Z/MTbtX+Fq3bmPzI5p/tPzq3yrWXNbpNcNN++RGVdnmfd/4DW9PD+8ccq3Nuc+ummZYv3KruZtjb/lamx6OskpdLPcf4/n/APHq6q30NJm2WtnxHuVvl+7/ALVX7HQ0hUbE3mT5Xk2bflrtjRgc/tmcjb6Pcr+5hdgVb5Nq7a39Jt3sU87e29Zf9X/z0XbWzb+H42f9yFKRy7dq/wALNWja+G3VNkkPm7X+fcn3v92j6sP6xE1tEhCeDBDjy/8AR5OB/DktXKeSkO9Emk+/95vm213QgZdLa3XJPlMB8vU89qw7rS/LjmfYqPD/AHn21+s+J9FyyjI12w0f/SYH2nE82sHgbf8APpflE5iSFGk3p/wL/ab/AGqpXCw7rgwpz/B5n95f7tbuq2qANND5bI332X73+1WDqUbyQumyNx8qxbXr8g+q9eU+O9tEydQv3baiTqHbd5/l/wALVkXF1iJcw7W/3q0NUmRoTDCi7V+aVl+X/drCurxI/Nd33vtVVVvurVxwfu+6ZyxRZtbhIZWjeCMrJ825k+7/ALNTLI9nDJePCr+TFu2/8CrPs9Qti62z2zD5FVlb7tZ3xO1qHS/Al68LtmOJtskf3l3fLWcsLOMveia+25jwD4tfFRNY8aaleJNytx97d/6DXOyePH1SHZ526ua8RL/rZvl3s/zN97dWPZ6pNDIfkqIx5TG/N7x0V9Ik1wz/AN77/wDtVmyfM4R/4f4akt7gyw/vPl/2v71RXi7tkzvhqCOWERk2z7jjlv4azry2dlb+9vq08iNMu/buX7lNupt3zpD/AB0ehcfdMqQJDnKfLup1vcOs6zBcU6ZnVnKbQWeqzb1X7/NOUh8p01vHDqlnwnK/wrWFdW6WuYXRlP8ABV/wjqyWt0IZn4Z60fGWgzW+L9Ifkk+b5aRPwyscuY2jkHzZ/wB6tnSbX7VAUf8Au1ntC9wq702lan0uR7e4/efdoCQzULWaGMpv+X+Cs+OTy2ztrodZVLi23oi7dn8Nc9JvWSguPvETM0jk5pVXbTU6/hT6qJoFFFFH2gClVj9zfik/4Bmj/geakBd3y7aSikY4HFXL+6Am3b82adRStyu+lEmQlFFFHKUFbfgWR49aV0P+zWJWr4P+XWEcpkrUkVPhPQ7xnaNfnX5f4l+8tZdxdJGp/c4Zk3VoXF09yqwv92sHVJsK3yYXb8qs9X7kTmPYf+CfCNd/tU6TM6bRFZ3jr75t3H9a+jv2sLeF/iRptzJGCyaKNrHt+9krwL/gm7pQk+OtvrzqAWt7hF+bn/UvX0L+1dOIvHGlqJGJOmgmLPGPMf5q/YMNb/iBGMt/0FL8qRwV05Yj3TyLxJC8MUd4j/3W+9X15+xPrz/FD4I3/wAKL/VY47j+0pEsFklZlVmhZV+WvjvxJvvf3KIse1NvzP8AK1dv+zX8Vrz4d6pczQ3LM0d5bzrHv2t8rfw7a/FsLU/e8pnLllSNv4sWHif4I/Cb4haN44SO31fT9BuINsifLM0jeWskf/AWr4x+FUDx2jFPn+X5fk+7X6lf8Fndc8B+Pf8AgnHo3xpsIoU1vUtcs9L+0Rr800bbpJFb/d21+ZXgSzSPTo977N33l/iruqRpKXuHXhuaOHXPudXu3WqfPtZv/Hqm0d3XUndtquz/ACf3fu0kCo1vs8nC/dWP+Kn2sKW0YmdPMPm/KqvU8oe9sfYH/BK/Xtb0n4vanqWg6xJb3Fx4PuoJWjZlZo2Zd3/oK19D+OL618LWLPcvJmTc7t93ctfJH7APxCm+H/jjVtYfSftzzeHLiCC183aqszL8zV6pr2tar4y1I6x4nuZEaTa3lq/yR/7K15mOxHs5csdzzsRHm1iS+LvGl54g86bSt0MX8Ks/3l/2awk0ua4maNIcK2399/e/2aluLqztbf7Tqu1FX5ov723+7VW61x2sRc3k32O1+bZDt/eyf3dteZ78Y80jKNM62OBYvh1dW4IAWxuBkNnH3+9fLWueJvPZ7PTX3FX2vJsr6U07UIdT+Cl1fWsTQq+k3YVSeVwJB+fFfLFx9jtYXMyNmP5ot1ftHjRJ/wBh8N2/6BIf+k0yo6Fa8W2sYftNzNu2y7v3n8VeT/F34i+RbTQR3Pzbm2r0+9XRfEzxtbW9tNsuWRF+b5v4q+ffFXiK58R6q9/NwD9xfSvxjL8L7T3pHrYPD/bZUurqa8uHuLl8u33mqOiivoPhPSCiiiqjsAUUUUSkBc0+GFoi7puqO4sHj5TmptKu4rdZFuXONvyIKn09od3+kuoH93dWMvdkZe9GRlEbOGGKA27mtPVI9NkuGENyr/7VUprN41zvX/gNVGXNuacyGwSFJg6jNd/4C1aG4u0R3+feu35K88VvLf5K2vC+ofZbwfPj+41XykSifQWm3yfY98zrtb79YXibVPtEMiPeKnl/dXZuZqoaX4ge40N33r8vy1zt9qzzTtvdh8u16XNzHPHmiZGqNCNQa837ZVT5GVPu1+0v7KvwR/4VD+yf4F8AfYNlw2jR6jfyRr964uP3jM3/AH0tfld+xv8As6ar+1Z+094P+BuiOuNW1aN9SZvvR2cP7yVv++Vr93PE3hu2jmfR9NRktreJYLJd+7y4412r/wCOrXkZpK8LM9HAy5avNKJ4dqHhPzlbfu+X+FvvVjXGkuuIURQ7N8jK3zV6zrmivbzbERU/h2q3zM1cjq2g7V4hz/F935q+ZrSlGWh9RRrR+KJ5jr2n+ZI8c22It8u2T+KuK8QafCzK6eWHX7vl/wB3+7XpviTS7xZNn2ZRD935vvNXF65a2yrLZwzQr/DtX71cUf3nvLQ9iniPaQOEuLOb7Zvj2lZNzbflpq2P+tDvIrLKo8uRvvVoapa7djw7d6uyxTNF80f/AMVUEzIsaJMjGRdv7xa09pCUrlyjzRuV2s/uwvMrsr/uvlpF86HzIZodq/xs3y/N/s1ft5I2khTydpX5d33adJavPuNzeK4j3bVZ/l3VcanLuTKP8pg31rPJHhLZt2xt7ferY1hFtfgRq4hHCaBfED32SGiHT5rq3GxG2/eZWXarVo+JrSGT4V6tZiIRpJo12pUdBmN8/wA6/oDwE5f7cx7j/wBAtT/0qmd+Uc/1ivzfyP8AQ/Mbw34Xv9a1p/tkLHdL/rF/ir1vSfhH4YXSnm1iwjkTytyNt+7XXfDv4V6bp2lrrFzHH5S/N8y7dv8A8VXK/F74hW2lrJbabc/d+Vdvy/LXwq5IrmPxv35zPLvil4X8Daey/wBlWDRP/Ftf5a8/lsUWT5Pu/wB5q1/EGtSalcO/nMV3/wAX3qp29q903mCo5uY6I+77pUh0ma6/1Kfd/vUv/CM6kq7xDuFdLoul7m+40qfxNWtdR2dpb796jb8q/wC1VcqJjLseezaTc26/vrZh/tVXa3f7ipXX6xqkNwGTYrLWRb29t53qzfwrUy/ulRqGMUfhKVY2YZH92t9NIs2/1iferRtdC01o13w7lp8oe0Zx6283UJTvss+MeV/wKvQ9N8M6JcYT7M3/AAGui0TwfoMMqv8A2bDt2bd01HKTKsePx6ReTfchZto3fKtOGh6kzbPscmf4dy172sem6XZva2Gm2+1vmdmiXdWKuh3PiLUEcQ72V/4Up8sQ9pI8butJv7OPzrm1ZV/vNUUaxPJhn42/3a9H+MmgpoukxLs+fdtZq8+02DdMsv8ACv36g15vcLdj4ZmvId+9VH+1TL3Q3sF/1i7WFdFZ/u7Mv/33urC1y53Myb8/w7d1BnGU5GUW2sSetM3O336c4yd3rTaDaIoYrR5jr/q3pKKuMSiSNsHe/wD+1Usb7W3pxUC71+THzVL87Y+7/utUGZMD50gff1+/VmE/88+WV6qRqi/f3VatvNZgifKy/wAW+jnIlH3jc0k+Wy70+999a6Cx2La750z/AH1WsDS5EmZP3e7+Gt6SRILAyOmAqfJt+VmoEcL4yuPO1Zk/hWsqJPMkEP8Aef71SalcPd3zzP8A36seH7f7Vq0cPbfWsTX4Ynaw2b6L4RZF+9JFur7c+PErw/8ABOYyxk7h4L0jB/G2r401fUbbTbeGzdG27fusvy19q/HuzOof8E/ZbSDjf4Q0vb+dua/W/C582U55/wBg0v8A0mZ9bwmmsJj7/wDPp/kz89tH8WTW6t9pfctdTpOsQ3UKO/zL/tVwl/ot/p8jJMjUyx1K8sZB87Y/u1+Pnx3LGXvRPS2sbK8Uokasuz7tYmreEUjj3pD/ALX3ab4b8Xoy+TM6ru+V2rrPtFtcQ+dDt+593furSMiLTOK06P7KyTRpg13fhnU4bixa2mT738X92sfWNH3Ik0MOC3+zTNHknspt5mYL/d20EzNfxdpfnafKjorBk2oypX0d/wAEN/jI/wANv2vPD/hjXvEOpW2i61fx6dq1rZ3TItxD97ay/wAS7v4a8EvJE1DTVTzsPs+638VZPwD8aXnwk+OGleKoXxLY6jDdRbv7yybmqJ04VKckKXMf0QR/tP8A7HnxW/bE0fwfqvhLUNHtPBeuNomh2eqaivkQ7d0lzcNH/CzNtVa8u/ZO8FeLL/4qeLPA+hftAar4N8NeOfEN5YX8mjxKslxp7TNtVWb7rMrferxj4nfDvwNJ8dvD37QmleNtJ1uHx9YTa59jsZ1Z9L8uNdzSL/DubctdD/wTh+JXh74+ftHRaJrviT7NYSSzNpax/K00y7tu5v4V3VxYiE48vIzzuWrWxPNLSx8bf8FZPgN8OP2cv+ChXiz4QfBjw5qFn4Y0XT9PTSnvl3fa28v99cK38Ss1eS6DYpJpYe5RkdXZWX+Kv1Y/bB+FPw9/bq8B+J/iXr2jx3njj4b6yunf2Lotwvm6lp8LfvJPMX+Lbu2/7tfmNoWr+G/F2paxqXhTw9Np1guqXCWFjcXXmyxwq21VaT+9XZGp7Slc78vlKVfkZl/YYZo2CQ8R/N+8rP1TS0ZmSBP7rbVrrG01GZN/7oqitu+9UV1YpcKr/ZmJX+Ja1jL7J21v5jg5NNmjbfs2/P8AJHt+7U9rZhd3nPs/irdvtLmjnPyb9yfMy/dqFdNhhkbzoWKqv3lrqjseLUqe9eJgLv2h7ny9y/L833dtfQf7F0AgsPEKZyfOts/lJXiq2KyZQ87k+9Xt37G9s9vZeICxB3SWpyvTO2TNfo3hR/yXmF9Kn/puZ9RwGn/rLQb/AL3/AKRI8K+OtqW+LPiTK5Da1Oc+nzmuJaPy12b2/wDZa9F+N1u0vxT8RyBE2rq8+5j/AL5rh7q3kVNibflT7zfxV8Xnn/I7xX/Xyf8A6UzxsdUlHMa3+OX5sypGeHdvRt38FMaQMp2bdy/eq59nuYY13ybfkqvH/rDv2/N97an3q8XlkRGUSLzkXr87LQziMN5O13k/h/u1JDbuyum/bt+41OmhRsOm7ev8TfxVyyjyyOynLmhzCQtNHGvo393+KpVuMQ+fs3M38NFrGkakPw33qGhRZEhO4q3zbv7tZSidEZe6PkuNq/uU+VU/h+akMjyN5+9fm+VPmpI4CqnyduPu/LU1tp+795sUfxbVWp5UORDHHt+d92V+6uyrml6XLfAbE+7/ABVYtbOa4m2eR975dypXXaDoMMcA/iXZ/c/iropnJXM/SfDLy5eH+FdvzfxNW5a+Gd02xJmlMfzL/vV0nh/wpDcSfaPI4+8i7P4q6Gx8IpNGNiqrt825Vq5ROL2n8pxNtotzCuzyWZv4NqfdrVTT5rfHnTbGVd3+ztrt28J39q0bpbMzNF83l/dqhfeEzGrzOkY8v7qyKzfM38NZ1I83wm0ef7Q/Vmv2nZ/JXDL8/wDdrAmv5vtR+dcbP7ldHfRzNDK8xZdz7drfw1y+pQw27fO+/d/dr6GOFhyeZxRxUuYlh1Y27Rpsk+b5vM+981bun695duNjt8r7trf3a5FZ0hU/eR/lVGarSXUxQIn3l+bctU8vjL7JrHHSjqd3/wAJQ8jb0mj3qisir/7N/tVaj8SPN5rpc79qf6v/ANmrgIb+ZFZ34M33G+9U32zYzb3xIrrsVf7tFLK+aLsVLMLwudxD4u/1aB2Zf4/Lf5m/2aY+oPIrOZoV3P8AdkbbJ/vf7Vctb6gLrbczp5bt8rq3/staulrHFL/pO0q3ypGv3lWtP7N5TL69zGwtwt7NshRQ/wB1Wb+Kpre3uVki865Vw3yvCqfw1Xt7OFfK2O2FfcjN/eratbNftQtpnbH3mbZVrL+U5/rnvF3R7GaSaP51bb8yLv2tu/2q6a10kqwhd42f73yvuVd1Q6Do/wC5aZ0jZF+42z5ttdhpGnpax+TMjNFJtbdJ96pjg77DljOWPvGHH4bTy2eSH545fkbyvvf7LVch8PzCP98jf6rduj+6rf3a6L7HDt8mT5n81fKZv4Vq4ui/M7wou/5vmaqjQ5Yk/WOY42dJHvjHMcMzgHd2qvrGk7W3w/N5i/e+8u6tHVIjB4geLptmHJOfTmpdSsYY9nkuz7tzMv8AFX6n4h0efKcnfbDx/wDSYH3XGOI9ngstfeivyicDrFnthz9yJkZX/irmbyHzIf3G4bk2MzJ/49Xe+IIf3a7EVdu5tq1xepxvCGkd2Mrff/dfdr8zp4fsfC1MRynH61b7pD+52IvyszP97+7XPX0LR7Xd9y/KrqtdZrVrumaHyd8ez59v3d1c7qEbsySG23fPt3bv/Za6Y4HljZRMI4iXxGX5EzKz72Rmb71c18Wle78NzQw7R5n3t33ttdXtuftHz7T8nzR/3a5P4sSbdPTZuiPzfNs/8drkzHC+zwrkduFrx5uU+bdc0+2maVC/3Xrm7yzSPc6bcLWlr2pPJqUqu+G3/dWol/fJsyuG/wDHa+U+LRHpR+H3inDK6qr7FVVT73+1VtmS8gYJJudv4qimtXDfvCxVvl21CsgjkRNjfL9xd1OISiQXCvHNs2KV/vVG0ybdjp8q/dapLp0kLbE/36oXk7x4kR/mqvcCN/hLMkL3C5jT7v3WqpcQtGuzHzfxtSR3jxYdDy33vmq1HIky7+rf3TWZcpcupnQsYZN/da9E8G61pvirRZtB1P8A13lbYm/u1wd1YzIvnJytO0fVbnQ75byHcpoHpI0tU0m60XUJLO5Rl2v95v4qrTQ+SwdOVZK66+jtvHGjjVYfluY12s33a5Vle1keGaRsr/C1HL9omIlrcZj2z7v92s/UI/LkLp93/aq1eSJuZ0T/AIFWfM+6TO/5auMiojA27mikVdtLTNQopD8vz4paACm7dvzZp6feFJU+6AUU3P3aU/N8maIgLRRRR8QBSMueRS0UcoBWr4PV21hNj4rKrT8J7/7VXYmSv8NSKXwnaXDItqPm/wBZu+b+7WBrEm3ds6/3fvVt3kjrA0f3VWsDyZtS1aCzhhYmSVV+WiX8xgfTf/BPOzew+I+hRykF547uVyOx8h69p/a0Rm8daYf4f7LAf2HmvXD/ALHei2lh8VNLa3UKkdnKEQptKt5Dbq739qtW/wCE+0uQu20aV90DOT5j1+xYGUf+IEYxr/oKX5UjyZ1IuvzHjmvW8ysiF1likT5F+61V/BNi9x4otJtNds+btbb/AOgtVjUo7/VNSWzs0x8+yLb8zV9Cfsm/sm+IfGmrLPbeFbq6upmV7O3t4tvzf89JP9mvxXC0Z1JmcsRClE8k/wCCkPxB8T2/7MPw8+C+qQ3CQXXiKbUovMf5f3cfl/8As1fPvhfENnDshVVjT71fUv8AwXD8Dn4Z/E/4X/DfUb9brU10O6v9S8l9yQtJIqqq/wDfNfMuixosaJD86Lt2K33q7uX3z0Kc5OlC5u2ph8vfNMzD726lWZGhEJT5v9yrvhnwzf8AiTVLXQdKhmuLm6uFjit44t25m/hWtD4lfDHxn8J/EX9j+LdK+zTb22x7lk3f8CX+KnGXKV9s9K/ZT/c6pfzQtGv+i7d0i/L/AL1e1LeXOrXDw6UnzRvteaZPkXdXjv7JOm22qXmow38MjpHbrLKv/Avlr1zxJ4qs7O4/srTYI43X7qx/eX/erycdKlGrzHl1pctWxFq1xYaAN7zfabz5l/vIv+6tcT4k1C8EM2sPeK00MX/AF/3a2vst1cyb7y8VFb5vO+9trkviJqT2+mw6Vsxudmlrx61aX2zHm5j1HwTI0n7OrSzRk7tGvSUz1GZeK+QPGnipY43s7ObcjfMzN/DX1x4PkD/syzOjdNBvgCPbzRX54fGPxzFYPL4e0yZmuZPluJP4VX+7X7v4uUJYjJOG1/1Bw/8ASaZ1YajKtPQ5n4meNn12+/s61uWe2h+Uf7VckuMcUrAt1NIq7a/LKNONOHLE92MfZx5QVccmlpGOBxQrbq1+EsWiiinHYAooopgOjj8yVUP8VDRPtZ9mQv8AFTaWOR49yJ0aswEqSGbayh32rUdFXyoCSaRGbeny062nMUoZRwKhqS3jfd/s1ApRO+8G6w81q9tM7bWT+H+Kq2qXjx5m2fd/u/erG8O6klrJvmfb/do1jXHmm+5xvpy90x5T6p/4IveOx4O/4KZ/DCXztg1a7utLn/3ZoWVf/Hq/cjXtBSx8+wSH5o5WRlm+996v53/+CfHiF/D37c/wk1p5mZrfx9p/zL/tTKv/ALNX9InjSzRdW1ATQsrfapG+Zv8AaryMdR5pG9OpyxPKfEuj2d0r+TDJCy/K275mWuM1aGGOeZHTcsfy7fK+98v3q9J8Sectu0bzMrN/F/d/2VriNUs90LTWz5Xyvn8z71eJWo8vuuJ6dHFcu55T4is5o5Hh8nasn/LST7tcLrlgm6XfDsdflVf4f96vUfFFsk0jpH5ibvvs38VcJrVrDDHNM7/OrfeauPlpS91Ht4XEcx55rFrmN8vu+8v91qobphGjzWfKqvy/xNW9qlrNZ3H7na+35fmbcrVlSWsLTJN5zLt3fK396sp0+V2jHQ9eNT3SrDG87SwzJHs2723L83/AWq3Z2/mKj9WX5vu1Fb6f9okea8RRIz/JtrWhV1s/3MOdvyvH/dq+WMpxM5S5feD+z3jkRJvu7d+6NvmVqZr8DL4K1GDdknTpwCVx1Rq19Nhdlj+Rc/3tny0zVLe1eGe2UEwtGVwR1Uiv3/wGp8mdZg/+oWp/6VA9LJKntK9Vf3H+aPiDWvH02n6HPps15t2ysGjX7qt/s14D441681a+d5psru/v16/+0xbw+H/GV3ptnbLDFM7Mir/vfNXlFv4dutQk3vbKV3/xV+e017SlE/JqkfZ1ZHJw2M11J5wh+X+9XQ6XoW2Nbl027W3V0Fv4ZsdN3b3Xev8ADWZrmtWdirJDNg7PmrYz+IS61CHTV2QhQfvba5zWNceRzBJNz/e31R1LXHumd0Rs7flaqLfN87/e/wBqlzcxUYltrhPMCI+fl+WrNv8AOo2J8/8AG1U4Y3kkCJ0rW03S5ZtrojZ/jqOWYvhC1WZhv2fL935q0tNXzm+dGVd3y1Nb6P5G15nY7vvbv4mrQ0+z2y/O6rtrQjm5dS7o9v5arvm/2katRtW8lVd/vb/vbP4qzluraGPZCm5qb/aEClt/y/8ATPd97/apSCXMdBp+nzaq2z77t8v/AAKu60HwnZ6DYia5dd/91vvf8Crz/QfElnp6rNM/zL821XrTuviJc30DW9u+8NubbJ/dqZe9rEOWUuU4X9o7Ura4voLa3m37f4l+61cNoVt8u/yd27+GtP4mX1zqGvL9p+UKn3ah0eNLdWHyk7Pu76Rr8MNSbWr57WFYYXbDJ861zV5MZmxs4/vVf1i+eaT7+Qvy1lSOm7ATbT+H3R04yEc7Dg0jDI4of7pp25NuacTRiUUUA7e3P8NSUOX5m+c4qXzFPzpubb/epiqjLn5s09f/AB2gzJI1jaNX+bP8dW7Pf5nnGNiN/wB2qm5Fj378n7vy1e0xn4Kbg3+1VcpMjf01Xl27/u/e2qtWPFGqJDpJTGG2/I2/5qk0W3O5Xf5VrG+I12rSR20fy/7NOK5SPtnJv9010fw9037VqyzOm7b93/Zrna7X4d2otbGa/k/u7aZtU+Eh8Yapu1BofO3iNdv3/u19/fFuYQfsDRTEDA8IaT1/7d6/ObVm8y/km+bDSs1foh8bWCf8E9N3UDwbpP8A7bV+t+F//Ipzz/sGl/6TM+t4VVsDj/8Ar0/ykfFF1bWGpWrNIin/AHqw9Y8BecrPbJg/wruqbTtVeT/lhs8v+9/FXT6TfR3S4MKlv4F/u1+Rcx8T/eieVtbX+l3DI4ZWWuh8NeLHtYwk3zfNt3NXT+JvC9hqlq9/bKu7+7/FXE3mi3mmt53ksqr92nL+aJftOY9F0vWrbVF8l3yPvbV/vVJqGj741ubbaP4dtcBoesXNjMvzso313Hh/xBDqGIZn+6+7d/epxl7pEy1o9vcs374fKvy7a5fx3b/ZdUhmSFsLPXZTW/kyfabZ2+Z/k21g+NtPmvlivLlG+X5mVaqMf5RS5j7/AP2JZpvin8K/CNnc2cNmNJ066066ks2/eTfeZVkrC/4J8eILPS/2gLGbXrm4g01tUmgezs9ytJuk8vb8vzLtrs/+CWqeAPF37F/jnRPDsN1N4o0nxbp9+8kny+Tp+1vOkX/0GvMvh7eal4P/AGltetvD141s1rq7T2TK3zeSzbttEY81GXIcsoylXPufxT+0T4i/4I+/HHxJ4mb9muC5sPiF4QuZ/Cr6zOIvs8kbMquy/wAWGb/gW6vzh+E8mpapoN9rGq+T9tvr+S6uo4V2xeZJI0jKv93burv/APgrh4y+PvxA+Pvhjxx8aviVqeurceGo7Tw+s4WOK1s1VW8tY1/2v4q4z4I2rzeF5Em2sv2hfl/2lX71c8aMqcbnVhKcadU3mtUaQPM+3cnzxr93/dqCbSkWQ2sXzq33tqVu/Z/Lb50+X733futVaRXt5Hm37tu7bt+63+zWlOPNM6K0uWBy81m7SGzeFfli+8vyrVRdPRV81PufxMtbt8uxdhm/1i/Myr/47UMmmpDMzpyNu3/Zrt+zZng1Jc1W8TBW1hb5ETb/ABOzfw17F+ypbJbwa6FdTmW3zt+kleX3EfyvM+7ezKqt/s16r+y3EUtNccOCr3ELKQMdnr9G8J/+S7wvpU/9NzPq+BJc/FFB/wCP/wBIkeNfGW1B+JOvYTKnVZmdf73zmuKvLFJZk2QqW+Xau2vUfidoUkvxD1qZZdobUpnw3f5jXPXHhmFmV5rZk/utXxmeR5s7xV/+fk//AEpng5jWtmVb/HL82efSWfmQvvjbc3+q/h21VuNN2sg2Ln+Na7u+8LTW43ptdPmVFase60OFgmxPvP8APuryvc+Ewpy974jlmt5lykKN8zfd/u09dPfcnyfL/F838X+7W1No77vJ87au/wCXy/uqtRLprtMYX27925f9quWUT0sPU93lM2PT32b3Xb833Wf5qmWyeNdi7S33ttaUMKRtsSFSv96nQQvGyo6Ns/vMtYyiehT3MtbF5NzQow+T7v8AtVftbF5lRIQq/wAPzfxVLAschZIYW+ZvvMlbml6Wkql7bk/d+aol/KORNoWk+Xb73+7/AHdld34Z8LmT959mjYf+PVR8M6Huj8mdGHmJt3bdzbf9mvV/BvhdDl/J8uLYqPHGnzNWlPkictT3iDQfBrraxQmFmEi7t237tdboPgd2V/MtmH8PmeV96um0PwrDZwtNclvmZdkbfw11lnpNtaqHeHEUjbNuzdtrOVb7Jj7CBwX/AAr/AMxWtjbSb5Pmikj+b5qyNc8D2y5SFN38X+7XslrpNnMrfPvVX2pt/vVQ1DwXYLC8KWzY3fN/dojLm+IUqZ836hZ/Z4wZrZtuz7q1y+uWLrG6PDgr92u81zTXmkaBIcqrs21f7tcdq1uitshTllbbuf8Ahr9F+r+6fKU63LI5Zi7XCpDMr+Z8u1v4dtPWGaFVgdGETfM+1/mb5qdcK8kjwlGYL99tn96pLeGFdltbWzbY12/vK6KeHtC8Tb23tPdHSWaKpdHZmaX7u77tOW1IzN827Z8vl/NSWilpPubhu2/K/wB2nstst2Y4XkKr8u77u2uijh7fZOeVb3CzpNnC0nnGZn8x922uh0mRFmf51+6pX5PmVa5qzW5kYfPuH8W5K6LTWmuE3oivtf5mX5WqpYOUfjJ+sc3unQ6XHtuP3zrtZflXZ/DXQ6fGjXEU32lmO3y33NWFpbIjI6P5vyfvVk+Wuo8OxldkM9tGn/AqwqUYRNIy9w6/wfZvFD9mk2na7Lu/vL/vV2GmWME0KI6SbI/9Uslcr4ZaGH+CTbJF80a/ers9Lk2wo824qu1fmf5v+BVw1I8srx+EuMoyjYuNYpNuCQxuy/xN/eqRbV5IxD0ff87LT0kT7RNG7xsn8P8ADtanIyXFul5M8jHZs3b9vy0uXsRKXKcFr8Mdt42eDAdUuYweeG4WtXWrBGaeb5S+z5VX71ZevqqeOmWNcgXMQAYdeFrb1KTzI2kgTJh+4qxfMrV+nceJf2blKf8Az4j/AOkxP0Hjdx/s/K3/ANOY/lE4TXrW2ms3RI2WSTciq3y//s1x+sXX2NUfZ80e1XjVd3zV3muWsbSOjvh/mZVZfm3VyGpWn2Jkd3Vk2/dVv++q/PqdM/Pub7RxusPDeySzO+X835l+6zVyOpRwNIz7JIy27fu/hrttUj8n5EkmL/3W/u1yuoWb3i+d9mVVZv8AWK//AI7XoYWPxKRnze+Y7w2SyG5fd/Cv+9/tVxfxesoWs4kSFg7O37xn/wBn5a9Alh3TH5GRWTbtauQ+L2nvb+G01B0V0tbqOX/gO75m3Vx51h1Uy+fL9k6cHW5cTFSPkHxBa/Y9Uld3+ZZW30+zZA29EY7vuVvfGbw9Np/iKa8hhbyZH3xf7tc3pbbmbY7f7tfmkf7x9R8RamkO3+6v8Tf3az7r+JML/vK9WbyZEU79y/7VUJpPOY/7X/j1P4ZBKMSORvNC7EVV/wBmqNwok27+Garc33VQPgf7NVmciTZsZqfL7pUSpL/rClCzTR/x4NXG035WkfpVV7dlByPu+tLmNOaMi7Y6s8kohm+ZP9yrl5psN3++T+5/crDU+WM5rqvAz2epI2n3O3zNvyM1EiJR/lM7w/rVzoOobN+6Nn+f/arY1aOz1KP7fpu3Lf8ALOsjxFov2W6KJtG3+L+9Wbbahc6fwjsv+0tTy8xXvDtQV1B38f7NU1+X71Wb65+1S+bvzVb7/tiq/ulREVtpzTw27mm+X70qrtoiULRRRTlsAUUUituo9wBaGXdiiimArM7cvSUUitvbFZgCrtpaKKACtjwWv/E0WaP7y1jK2eDW14Ng3XDzdlq47Cl8Jv6szrCzydG/u1r/AAD8IzeLviBbbE/dWrNOzM33dtc94gn/AHexP4q+0/8AgkP+xn48/aEk1nUvDGgzXO5lt4pPI/1ar8zM1T7OVT3EefiqnsaHMaf7OOnT2vxYsW8ghBDPliMf8smr1jxx8FfEXxs+K2keFvCeiXuqajc2fl2en2EO93k3sVJ9Bz1r374g/wDBO7Uf2e/DJ+J0sbyTWEEcepCdQptWkcRqBjqzFuR2ANbH7LviDU7bxFp+jeGNXbS9TXWVnXUbeH97ghFRN/8AdyHO33r9ryrDxpeB2KjP/oKT/CkeB7R1KXMjE+BP/BInQfhHq1tqX7Q2txprk0S3D+H7FvNntZGb5Vkb7u6vq3wn8PdK+Gvh2Wz8K6DJoVqsX/H1ffNcyL/vLXf+JJrDT/F194kjhuPEmrSOqXV95W35lX+Fvu1558Trrxnr0n2a9maC2k3K9naxNLLu/wBpvu1+URiqceWETJUf3vMz8bf+C3Grf2l+31p2g/aZJY9L8HWbRMzbvmkZmavCNPtXVvPf/lp/er07/gpxZu3/AAUZ8T6VePIr2OmWkT+c25t3l7v/AGavOLOHzpAj3Kr5bVwy+I+ljH91FnuH7JenfYdZ1Pxgk0aT2tk0Fv5z7WXzF/eSL/tKtQftHx22reE7DVU1KM/ZZ18pVl3yeXu27m/vbq5v4P8AxY0T4a6tNc+PLBr3SZE23Edvu3r8vysv97/dq/8AtG/Hrwx8VrrTLDwNo8lrpdnYQpPI1ksX2iRfu7V+8qrUS96pYyjz/Ea37Ndxr32e7s9NSR/MTa0kf+9/6DXrjaVZ6T5t/MitMybt0n8VeVfst3D2y6jPbOq/ul+bzf738Nek3Fwk0j793krF+93fw189mcX9ZvE82tz8w2+ZLiN7+aGN7fY3y/3v96vGPih4y87WpLCzTzdqY8yN/lWuk+JXxNext5tE0GaSG5mX/XKm5fm+WvIPGGpJ4P0ebUtbud02z7sn8TV5nL7afKRTjzep9T+D559N/YzvLuJ8yQ+FtUkRgc8gTsDX5c3d5cahcveXMrPJI2WZq/Sj4PavJr3/AAT4n1iXOZ/CGstz6ZugP0Ffmh5ntX9LeKMFDIuHu6wkF/5LTPZwEeVzXZjg27mikVdtLX46eiFFFFTzAFFFFUAUMdvWikZd1AC0UUUAFFFFTaYC/dapYztRnZ//ALKlmhRbVJg/zf3aYvzff+796jlMx6yTffBw1Cs8jHe+TTJGy3yU9Ng46VIHd/syatPof7RHgLV7WXy3t/G+lyLI3/X1HX9QvxChS41698mzVUW4Zom3/wCsr+Vv4fag2leN9G1VGw9nrNrKrbf7sytX9TnjDUEuLq3v9i7brTrWf/eZreNq48VT5uWREpcvvHBeIJt0bJIm4Rt821/u1xfihYbfda745vl+X/ZrstcuJlWXZCsvmM3yx/LtrifEXk/8toVT+4y/w15tajzaG9OpKUjgdcjma+3j5Xji/wCAtXC63bv5jvvVNy/vVZ/mVq7/AMTTIzP5KLsb5fMWuE8Qb0hXyX85mVllVv7q/wAVebOlGjK57GHqSicHqEMK+a802yJX+61ZMyzSKnyKrrLt2s/3q2dUvIYf9S+zc+5P4ttZLNE3yO7I7P8AeWKo9jzS5uY9SniPcCzhmvIUmSFQ6pul8n7tXNPtZt3k+ZJ8z7Nu3726jT7O2SHa/wAi/e3f7VXbXfb3CukzOn3vJX5f+BNSp0+WroOpU5Y8xb0+NLWzms4bnHlv8jM+5lb+6tV9XbyJJnmbAVMsfT5c1es4ZnjjTfGHm3M8aru+X+GsTxrP9g0DU7hgD5FhKxBXrtjPb8K/evAxp55mCX/QLU/9Kgexw1Uc8VWb/wCfb/NHwl+0RqFtr/xSu0d5H2vtT+L5q4q4utN0G18m5dR/tL81W/GWvPda/c6lN/rZpWavN/El9PdXDfvGC72r85hH91FH5nUl7SrKUi94m8bvdGVC/wDB8rL/ABVx11qE11Lvkm3Nt21O1reXDL5aN/3zWto/gXUr5kRLZn3fxbaqMbkxkc5BbzSfchZq19L8LXl0yfuW+Z/u7K9J8D/APVrxftNzats/i2rXZXHgfQPBOmrc6rAsUS/KrN96tOWFOXvGftPf908x0P4b3Jj86/RlT+P5f/Za1pLXQ/D9l9xd7P8AI38W2q3i74rabbzNb6JC2F+Xds+9XFy61rGsTec/X/aqJS5jT3pam5qWvQySecnWqEmvXPl/IWDfd2rTFtbWEGa/dl2/3q2vB9x4evFcw2DS7U+9J95v92p5uUj3zAW88Q3G7ZDINv8AeT71QNB4n3b/ALHIv+01eoWOraHZsAmnR7F++s1X77V/CV9CpfR1R/vfu/us1Iv3vsnktnda2v8Ax82zf3vmrVs9aeZRvfb8nybf4a7xbbwHfE+SlxEP9pN1VrzwHol5bG50y5xt/h27a0+H4SJHmfij/iaa4JvLbCr/AN9Uy6keGEH5V/vf3ttXdY2R60/k9IX2bqxNW1BGmcb2/u/dqPt+6aGbdS+ZIRvYhXqCl65NJT+I2iHBFIq44FCrtpyfeFUEgZdu6mKNq7yKk+8xSmqNvSgOYdG3zBEqS43x7k602nq7qmwfN/vUEj4W8xW7N/erS0mBJNvz7mrNt1cM+9M1saDGhmRP7396gmR1Fuk0dutyk20Km3dt3VwvinU31TVHn37gvy7q7XXdQTS9DZ/lQ7PkXdXnRdnJduu7mojzjgLCpllCJ/E1ekaXappvhuJAn+u+auA0S2+0X6J/tV3Oragn+jabHtTy0Vt1P7QVJfZMnVNK+bzpOGWvvX47Ar/wTxKqQP8AijtIA3dOttXxEslteW+9EZ9rN95K+4vjzEJP+CfkkQXg+ENKAH421fr/AIYa5Pnn/YNL/wBJmfXcKaYPHv8A6dP8pH5+6fcMW2P1+9WzZzPGyuPlb7y7XrEjhmttu9P/AB/dWrZ/M2/fX5DHY+M5jo7K++QI77tq/wBypNQ0m21CEuiK52/drHtZHXc5f/c+etWzuvLK/d+WtTLlkcnq3hu4sZj95N3zVJpd2beRE+ZStd/qGl22tWXyQru/hZa4/WNDezm2Q7i38W1Ky5UaR/lZ1tjq32jS4kd9/wAv3V/hqDWl+1W/91GrD8N332VhC+3av3K39QkS4s3dHUfxKtVGX8xnUjOR9if8EWdW1XVPiN4z+CFheeUPGHgi8giaP5WaSP5lWrf/AAhqL4p/4SqzSNJrVvKut27zWZW2t83/AAGvDf8AgnH8Vtb+EP7W3gXxVZzR25bXo7O6aSXav2eb923/AKFXv/xgk174L/tReNPh7co0ljp+tzeVDJ8q7ZG8xW3fxfe+9W1GPNKSOWp7soM5v/gplJpXiZfAPiHTLyaabT/D6xXCyS7tsjSN/wB81zH7PsLr4G+0zQ+an2j5l2fdar/7QVunijRfO8+PyVg3RQxpuZW/u0vwH002fwrs3udyPJLI7r/EvzfdauepFxid1GMvanS3Cv5P2l7bb82379ZuqMkKpsmxF95l/utVy/ZDIZodoVk+X5/mX5vu1zuuagkDSJ52359u7+Fmp0Y/akTipfylW6unVvOm2/M+3dUUl5t2pC6jb99t1UZtQRnOxNqfe+akMiNJs3/e+bdXYeJzTjL3i8sUN43ko/yt8zt/8TXrH7Nlutvp+qJGfl3w7cnJ6P1ryq1byvnTc6K235vvbdtes/s5MHstUdIiil4cZXHZ6/RfCdW47wvpU/8ATcz7DgP/AJKih6T/APSJHDePjt8Z6rstvNYapKef4fmNY91HbNmN0Ztqfe/hre8dW7r411V0kfedQkOAvBXdWfZwwz4mRN6/e2r/AHa+OzqX/C3iv+vk/wD0pnzuacqzGsv78vzZkXGn+c6pBCoP3/Mb/wAeqjqGi2zY32y7vu10clvC2XLzfu3bY0ifwtSjTXkgKPbfeXcu5/mryJS5djgj7vvHBXWgujfc3bn+ZqpSaTCq75o2PlvtTbXZalofkyJs+VG+Xy93zVkXFn5e5IYWST7v+zWFSM+Y9rB1OaJzv9nwxt58O4vv27V/vVN9heXdvRnH3dy/dWtBrG5+V3di/wB3cvy7lpiWkMaPvG5/vblfbWEonrUY+8VLOx8mTYjthf4pF/1ldH4ds7ZcJHD8v3l+T71Y9vbozZ2b1/2v9quo0CzhW4E25sKq7/8A7GsJfGbyjGO0TvfAunorLNHC29fldZE/h/2a9i8J+H7O4t4X+9u/iX71eceB9NeRVuftLLuVVRZP4f8A9qvZvBdnNJGiCCNl2ru/vK1ZyqGNSMOpsWemTQrsdPM27VSPbWxHZ7pE85/nklbzWX7rbaks1e0Vpprb7ybUVn+ZasRw3Kr+5EcZk+40kX3f71c0ZSlLmOeXu7iW9nDJ5Uz/ACIzbkj+6zNU02nzXUchWHa0P3V/iZf4atxr+5eaBIwu/Zt2/eq1ZrtZnW2kRdi/d+6y1tGpymfLynyJ4gb7Qd/3trr919qt/vVyeuQ7ZHmfl97fKtb+qahmzZEdVC/cb726uX1SREy/k8Ltby/4v96v2Gn72h8NHlUbsxZPOVtibS6/eZvvLT4bdLeF3eFvm+b79X49Nma9d/JXLbf3lW7fw55jFJ0kA/vfxVqpUoijzxMaRWg7xpFt+8v8VSw281xtR/7nzyRp8rV0LeFXmhTybbcuxV2tTZPDM0O1GhkXdu+Xf97+KtvaUvskL4jAhjeOQwpu+X7+7+GtvS5PMVZsKPmZdtRS6W9vHvlhmZ1fd9yraWr2sg85G/ePt+WorYiMoijH3/dNvTbhGjRHjZgz/wC7urp9HvvtCoj7tkf93+H/AGa5K1X7OzI6NsWXdFuf7vy1saTqCRK0Pk7W2blb+81cPtoG3LLqejeF79FuETYqy/xL/s112n6xDC0sKfM7SqssK/w15Zp+teZCJp/mf7rf7X/Aq27HxVNH87yfe+Xdu/vVy1ImkfM9IsdYtplCJCvyv87Kn8X+1VptUe8j3wbd6vt+avPbfxE/l/uXjzH/ABN/FV6PxRNI2+bayt8u6P8AhaspS5ZGsY8wa1db/GJu+OLiMnIwOAv+FbGqavDbyPI8myRv9b5b1zF7fmbUX1CQbSHDHK9Me34Vma1r3nyDe8mz73ytX6dx0k8vylt/8uI/+kxPvuOVFZdla/6cr8olnV768upGuUDJEysrybK42+1BLiaazuUb/Y+T+L/ZqbWNQuWk8yGaZArL8slULjUt0MyJDh2bdK0f8S/7NfAUZQjH3j87qcvumVqnnXDHYkizLFtRWrA1KGZyIZuGV/4k+X/9qt268l2fyvMi2/Mvz7ty1k30HlzCHy+PlZGV90daxxUI6lyozkZkMP7tvOeNhsb7v3mrA+Kdul94D1O2S5j3rZSbdvytuVfvV1Mi21ux37cK+3bt+bdXI/FrfD4H1ObfvRrVlfdU4/FQ+qzX901wtGXtoHg3hW48PfFLwmnhjxDeLDqtqvyTTf8ALRa888b/AA18Q+A9X+z39tMsbS/Kyp8rL/erN1TUNT0PVPtmmloju/hrufDX7REOoWv9k/ELR4dRSRFHmMvzKq1+XrXQ+o5eXY4aa3huoTsjZnX5vmrEmX98UC17JZ+EPhL4quWn8PeLPsDyN89ncfdVf96sbxd8CfENrGbzR4Y71FbbutZVZv8AvmtI/wB0nm5jy9mdfk343Uxt6/6n/wAe/iq9rHhfXtJm/wBM0e4Tcm5PMgZdtZu1448v97/aWl9k3NGyvIVZftNTSSaPdMUkmUfLt3Vl2UUt1OsIT5m/iq7e+DtSgXekbNtGXap5CfdGXWh2zxt9juVP+yv8VU9NuJ9M1BJgWRlbGajltdS01t7pIn91qZLcTTcO+6qkUdB4kuPMaG/R93mJ87NXPTS+YvlpWnb3MWq2gsp22sv3G/2qy5oXgkaF+GWpiOMRtMZtxzTlbPBpPL96Cx1BbbzRSMu6tAFopGOBxSI3Y/hQA6iiil8IBSv940gOORQG3c0viJiFFFFP7ZQUUUUuUAre8GnCzv8A3krBre8NxhdPd06/79TIiXwFiffcXwRIWPzr8v8AFX9En/BAPwn4Y+Cf7Iov/FulNDp/9qW76prEdvuka4m+byW/3Vr8Iv2O/hpZ/GL9o/wn4A1JV+z32vQteNJ/q1hWRWk3f7O2v6y/hl+yB8Pf2ZPh5rvgrwzfR3XhXWpk1S3025iX/R7jyVX7392to0ZVIvllaR4eYV5RlGNvdPlX/gqZ/bOtw3PiL4Pa+JPh68du+sWEhCNHe+Yqoyq3zOpyD7YrkP8Agn1pXwg8P/DXU/iv4ssvtPiG18RtZacjjKRRG3jYOR/vFh+FbH/BSH9nTxPoHgu3+NngnXC2hy3kdr4m0uSTAgbpCyL/ABDeVGa8z/Yk1zTdS07xF8MdRvBDJfRi8sWmP7vzIwAy8c7ipxx6V+3ZTTlS8EcTF+9/tK/KmcMnCSemh9I+IPjRpWtal9m+2bYmlXbHap8rL/FWdrXiywWN7bTblrcN/Dt3btrfdavMPDem6rDfPDDZ/Nv2r5afL/vLXVX0KaHbpeX9z5T7t7rcPt2qtfjtSUojp8t4n4c/8FAdem8Uf8FG/ijql5eee0eqLb7l/h2xqu2uS0mNJtqP91V3f8Cpf2g9cTxR+2D8UfGEMqyJceLbpVkj+7tVtq7abp7fKsycNs+bbXHGPMe7P4IxJbxQzCH5T8/3v4ahVv8Als6fN91F+7t/2qmWZG/c/wB5vnZqbNJ8u9+F3feo+IiX7uPunrP7Pa2dvDfb3Xe0S/NJLt210/izxQ8Nq8Ns+F/5ayK/3q4b4Ptcm1uYbBJHdlXbHt3bm3fdrV8ZRppNxJ/bzrF5abvLavnM0lP255mIj+8uc9r2pDTPM8Q63c+c6xfLCv8Ad/h3V85fHH4g3HiHU/sK3LMN26RWfdt/2a9C+LPj2eLTptZu3URp+6t41/5af8Br5+vLuS+upLub78jbmrXL8NeXtJnpYGjGUeeR+jn7Pf8AyjcT/sS9Y/8AQrqvzfr9IP2e/wDlG4n/AGJesf8AoV1X5vM2OBX9AeK//IlyD/sFj/6TA1wnx1PUFXHJpaKK/GYncAbdzRSKu2lqgCiiigBd7etJRSK26l8QDtqfwUBDI3FJVzSdPm1KbyYev3qcfemTKXKV44HZtv8AFW/4B+Fnjz4neKLPwV8PfDGoazq99LttdP021aWWRv8AZVaTTdBm/taKw3LukdfmZa+gvGvwY+Ov7K37PfgT9prwhqv9jxfEfU9QsdE1DTbpo76NbXasrLt+ZVbd96qqcsYnP7SUp8sT518XeENb8G376Tr1s8U0MrRSq38MittZf95ay12eXX1r4f8AB8fif/gln8Q/iJ8U9VjRNF+IOl2fw886BWnvL2bzGvVWT7zKse1m+981fJLMitv/AIa54y5om0WMJR23gYFSLsZl2feqJR82PSpoWh3/ACfw1XoVLcuaRO8V9HdJw8Msbr/vLItf1J3WoXN54Z0G8vPmkbw9p7eWqfeVrWOv5bLLZK6Fj96WP/0Ja/p1vtUhs/B+g2fzPNJ4X03/AFiNtWNbWP8AirnxHwnLiPhMvxFcQq2yZ2i2/daP5fmrh/El0kau6Iyy/d3NW1rmsPwnkq7K25tvzba4/XNQdVDzzeYvzb2Zf71cfs+b3hwlKxz2uXiR3Dvc2yqV+VW3/drhfEl6itMls80fmbf3n3q6fxNdTQ/JPtRdn+sb5vvVxGuTeTcSI75+60W37qtXn4iPvHqYepynL6nMkkjujqX8/dtZPurVBpo1ZspIRuVpfk+WNf8AZq5r0z/8sU3/AD7tyfLuZqzWjS1i33O4rGu51WX7rf8As1c3+I9OnK8NC3Zq/R5tm35Ukkfc22tbT981vG8yNmZPn/uyL/vViWsxbYo24k+bzFXa3/Aq0LO4eP7/AJ0asnyLHtZW+atI046GntDa01bmDHk7V8tPvL/Cv92uc+JtwsfgbX7qTcQuj3LNnqcQtmtq1vn+ztDDuMi7l3N/FWF8Unx8P/ELhw+NFuuSMZ/ctX7d4FK+fZhL/qFqf+lQPoOGZ82Jr/8AXuX5o/NbXJPtV000MrP/ALX96qFv4Z/tKYOerPUWo6g8Ko8f+7Wn4R8XabZyD7Ym4b/utX55HY/NJc8jqvAfwRTWJUfyfkVvmZk27q9o8I/CHwlo8K3OpvH95UX59rL/ALVeZ2fxkttJhVLDy/LX7u371Ynir47alMsnk3O7cn9+n7b3fciZ+znKXMep/Fr4z+Ffhvo7Q6OYzeeQyoflr5X8dfFTxL4vvnmv7xvL3fKu6meItW1XxVqD3M0zPtqnH4ZEgDv93+7Sl70eZm1OMaf2ShDHJcSb/mLr92txVSxs0mZ+P/QWqCOwS0XZs+Zf4f4aiuPtl9hE+7911o5UHmZ+qatcalfbPm2b/lrpPD95HptqMuu7726s6z0NLdvOmT5vuqtalvZ2e1Ud8/7Lfdo5Qv71iyL68vmZPLZVb7/+1XQaPoNy1qjujKPvJuqv4T0+zvJm+zW3mOrLsVfurV3xdDDdXhhudVm+4qy28Lbdv+zVe4Tzc2xauJPD2jx77/VbdJo33eWr1k+KPihpVjp62Hhvc1xIn71mT5Vb/ZrmfGngV47FdV0rzGRV+dWfcy1y+n71Vkd2Wsyo/wAxozXW23d0fczfM7f7VYV1I8sxd6uX1xt+R0Zd1ZxJ3ke9BrGIU35F96dRV8qNAooopgLsb0oXofpQzbqFO00pbEcrHwru+d3qSNU8yo1Z4/4Ny06ESbt2zmlykyLNvHMz/J/3z/erotFj2r+8TKr/ALFY2mw7bhXTmuo09U0+3e6/hVPvURlymcpcxiePtQSaOKwWHb/Furmqt65qE2oalJNI+4L8qVUqjePuxNvwJatNrKOEyV+b5a1vEEgm1R5tmxl/h/u1V8DLHb29xdhPnVfk/wB6rVwu6NpnfcW+/wD3acY85lKXvD9Lvvs67H6feWvvv40xpcfsFtGM7W8I6X+X+j1+e+51jHzbP9pq/Qj4vlR+wYpbOP8AhEdKz/5L1+u+GC5cpzz/ALBpf+kzPsOFHfCY/wD69P8AKR8A3Fj8+90/75ptrN5Eyo/T/arY8nerSPu/4DVKSxQSB0+dl+8tfkEf5j4otW6pcSM8LqP7+6pBdTRtvd9rbqr2cscVxsdKuXEaXH93a38W37tMDb0HWiu37y/wtu/iq/faemqQsj/e+98v3a5O3kmt1Z4U3bfuLu+9XTaHfboxvTKf+zUS5ufUzMC40/7DdeSU+Xd8yr96tBmM1mYfJX5k/u/NWrqVjDeKzoiod21f71ZM0b2Hzypz/tUGhZ+H/iq58L+LrHWLP/j5sb+G5t/96Nlav1A/aW+GOifGz9o3RfiQibLTxp4FsdSguPtSqnneTtZW/wB1lr8mtUvIIboO6fumb52av0V+C3ijXvif+yL8LvGdheNLd+Edem0S4kmb/ljt3Rrt/u104KX+0rzOfFQ/dXPPrXS5pJrzwvMkcvlyyReZs+9tb7y11U3h2bwj4dtIfsawwtFu8mT+Jq2bzw/C3iK/s5ns0v5rprhFVWXcrfwrW58VNah8Xfs86Df23hVrKXwveTWWrXHm/wDH00jfKzf7q1eMp8tWRWHqc1L4jyDXtas7VPMm+VlTdtX+KuL1jWvLmdJI96f3m/vVc17VJo2m877zPtiXfu2r/erkLy+/0gb+f95qwp+8RXqSjHQtnUN27zivzfeq7Z3X74RhGVfu7q5xtQRZH3+W6N/eSr9jceWuwv8Ae/u1t/hOCUTqNPvkkjaEcf7X96vZ/wBm+4e5sdUkZifmhxk57PXhFnfJ8kPyv83zLXuH7MVx9ostXbYikPACEOez1+i+FH/Je4X0qf8ApuZ9XwGv+MooPyn/AOkSOO8fiCPx3qcpMrML+bA37UDbj1rNjm8uZUR9hZWXcv3dtWfH95s8f6y7xnZHfy7gejfMaz4rp45P3zq5V9yK3ytXx+ef8jrE/wDXyf8A6Uz5/NZR/tKt/jl+bL8mF+S1dnRUXdu/vVb3JH88cLNui2/N95azYblJI96Jlo9zL/DtqeO4uUtV3v8A7XzfeVf7teZynncvN8I3VFSONnR+Nu35qx7pkht22W2/5d26N/u7q0by4RbeVHRsfMzeZ/7LWPcXD+UgR4y33dzfxVz1OY9LBy/eFS8kEjbEtVRvupVWOP8A0jM0LP8ANtSprpoZJld/n2/LuX5d1VppN0nkvt+/uZV/iWuOUox90+gp7D4ZHmZ0R2yr7dtbfhqR1m8m5dVVfuKz/ern1aCaTYny7U3Ve0nUHtXV32ttf+5u+Wsai933Tfm5T2nwPdPHAr3k0bOrr93+Jf8Aar2/4f3jtDC8zq7r8/mL826vnHwVrSRn7Mkyq0f8Tfxbq9i8BeIEt5beF5mKSfN8rfKq1zy55aky+E9f028e6uPs1zbbh977QqVttbzsn+pZyvzRM3/s1cf4d1bTbjY8Ny25ZdiNv/zuro9J1KFWCPbbX81t0jfLurGXN7r5Ti900bLZuPnSf7/+zSRxyQzM6TZH3Io/4abcXDzQqtt8v3vmqhqWtvaw+S80bSbd237q1p7SO4HxTqV86M1sjrtZ/nZv4aRbd764M0zttjXdKy7W3NWGNSubhfkuVKs/3f4maug8O28ilLl4fuvufy28xVav1WOK90+Sp4X3bmro+j7mxsV12r8rV0mn+HY1VLl0j3Kv3aZo9kk8yuvPlp88kny7q6fTbHbGHe2Up/z0/wDHq5a2OlKOkjslhfhM5fCdtcbHjtmCR/N/wKluPBaLl7k7dr/LG33lZv7tdpo+nzTQiZ9zCRdyN93/AMdom0+2jLQgqo+VFb733fvbq4pZhKMr8xjLCRied3mhwxxpMSxM25Pm+9D/AL1Zl7pKNcD7HujVvusz7v4a7/UdLdpGtofMCbdysy/K26sTUtL+x5eG2xTWYe03kTHCyhscsrw29wiOiuF/vfeZqI7rb5jv5ip/spVu6s5rWSbY/wA80u5Gb+7WdeTW0kB8n7irtddv3qUsV7xp9T7l6x1p9Pxv3b/uvuf+GrNn4mS3kfZNuH91q5K4uUt7dbVNu2P+6jfL/u1A2tOsaRP8m75dypWksdzbGUML3O9bxck0buHXau35aY3i6CzYhNzfPtZt/wDFXANrnlRs+9l2p8jNWbJ4s2xrc75Nky7mVqr65zlLDyie76ffGbwob6J2Yi3kKljzkZ/wrh7zxJbTMZkmZjJ/ra2/Cupi4+Cp1MfNjTLlsDvt8zj9K8lsfEFzcQh5J4wzL91v4q/T/EGtGGUZQn1oR/8ASYH3nGtKTwOW8vSivyidsupQzM0z3Mm1V+b5vvLUc+o/MPnZ/MTbtV/u1y1jrDqu+2mZvM3Iysn/AKDWjb3KbldPLYb1X5flZm2/xV+XSxnLHlR8LHDXleZo7nkjTzvM/uszfN5dI2+RmTezbU+X5f4qhs2hk23KTf3kb5/lqyykSI/y7Y4tu5fu1nUxnKdEcPKRUuI4XbeifL8v3m3fNXAfHqNP+FT63M6b/LspG+VNteiX0fmRpBD8zMjfvF+7XFfGyz+0fCnXYU3FI9NkeVW/i2/3ayxGM9pQ5eY2o4WMalz4w1aPzrFfmZtyKyKy/wCzXLXEL2txvT+9Xa60v2PTYpvMbay/Lu/3a4bULjzpSf4t1fN+6elH4gh1SaF1dZm+Wul8P/EfX9PmR4dSk3L9xt1cgqFm21a0+3dm2PuA/vVJXLA9Qs/i54rmiENzqTTRbG/d3C+Zt/76ouPE2j6gz/2xoNjcq0XybYtv/oNcJ500asiPytWre6f5WTnd/d/hqoy5ZGUtjfk0nwNffvrbRJrfam793P8Adq7DcW0lm1rDuddu35k+asS1mdx9zarfM22tPS5nWffPM2F/urVxFKX8pDrnhW8uoYtiK0ez7rL95q4/VvBmq6fKdttJtX+7822vWtWW21zRdnzI+35GV9rLXneral4k8OzSWs037v8AvL/F/vVPwjjKfMcoVmt2+fhlp9xdeeNkyfMvetr/AISawuTs1LSo2/2l+9WdrTWAYNbJyy/w/wANHNE2+IoUUUVBY3y/elVdtLRVfCAUUUU47AFFFFMAooooAKKKKACiiilyoBVXd3re0yaa30kum3bWCpw3z/NXQWUciCNIduNq8GiUTGqfRf8AwTv0+bTfFmp+PEhX7THZ/ZbC4b70MjNuZv8Avla/qG+HHxph+OP7O/hX4j6HrCy22reFbeK4h8r5o5o41jk/8er+cfwL8Nb/APZ30/w34J1V9uoXmkQ6tfwtFtaH7Qu5V/7521+y/wDwQ/8AilD4/wDg34v+Dt5qqyXHhe6t9RtbVvm22s3+sZW/3v4a6MPLlmfPYqpKpLQ7j/go28nhv9ljU/D1/JiTUUspoiW4l2XcQOPzrwD9gXwFD4o0W41eTTVmNrrEqh40BlUmCIjGe3Wvd/8AgrzbXD/CXSbm2gZreCURNJt4UNIjD9RXhP7Hvxu8DfAH9nTxJ498XeLo9NlTX5FsbdU3T3cgtosJEP73Nft2EqRpeCmKl/1Er8qZzU4ylTsdvq3ijwB4CttS1jXtehhms7qRZVa4VfJ+b5VZa+H/ANrD9rzxh8bLq58N+Cb1rXQt7farj7slx8rf6v8AurXP/Gb4yXPxW8V3usanbSWNrfXX2r7HJ96Rt3ytI396vKvHnjaw0vRZ/I2ysyyNtVfm+VW+Zq/nrG4+cp+69DelGV+U+MfCljNeeINYuXDFW1eb+P73zV2Nu3kr5PzfL/DXG/DeN76zmmmfa81/I+5v9pmrs/JTcmE3Oq/Jz8q/71d9L4D2X1HzQvJDv2LiT5fmqNti/I8KuPu/7tTXB3Q/J/wLbVJo9u/zkZlb7u2r+ID1/wCAPijw34K8N+IfEPiGGOW4j+zrpas3zeZu3NtrjPiV4yvPF2sXPiHUrny0+Z3j3fKq1Q0CRDYsj7di/wB3/wBmrzD4+/Eh7iY+EtKmUL/y9NH/AOg14lajKti7HPHD+2q/3TjPiR40fxZq7JbP/osPyxD+9/tVzZOeTRSAY716tOMacOWJ60YxhHlifpD+z3/yjcT/ALEvWP8A0K6r83y23mv0g/Z7/wCUbif9iXrH/oV1X5vMu6v2nxY/5EuQf9gsf/SYHHhPjqeotFFFfjHMdwUUUnz+1UAtFFFLlQBQG3c0qfeFG1FUbPvUogNUYGK0PD1++n3n2mPrt21QrY8EeHb3xN4httD02NXuLqVYoFZto3M22nzcvvEVPehY1ZtcvdS1RLmaZs7l+996vtD4Z2HwK8dfC/4b6r+1pD48ufBPgV7hvsvh3UVb/RZJPMlhjWT7rSN/EtfNmp/BLTvh/wDFr/hWvjT4neH4bu3ljWe80+6+1wRyN823cv3v7rV6N+1Z8U/Fev8AhDSv2fPDXhHQ4LrS7VZLy68P3O77Rb/dVdv97+Ks69eMrQW7OWitbs9P/wCCnmp/szftAfBHRfj3+zx8SNB8F+EdEvF0nwH8DrOXzbqys/8AlpdXLI3/AB9SN+8Zm/2V3V8CS793FO1CyvNNvHsL+2aGaN9ssci7WVqazJxvpxjKJ2jWG2ShndpN6CkY5bipLdfmOf4aCPhNfwjp/wDaXiTTdNT5TdX9vF/31Iq1/S94nWG1tbXTXEzJDpFnEsf8Py28a1/Od+zb4dufE3x58EeHkh859Q8X6bEkK/e/4+F+7X9E3jq++x+ILy237mWVkRm+b5V+Va5cQ/hic1bocpdXiTXDQvbMnl/3m2rXO6o00bMifLu3N81buoNJI0r3KRqu3ayr8zVg603mLvfcSy/JJ91q5pe7EuPxnH+JLf7VbhHKoq7Wfd821q4bxEsy70tnb/b3fdr0XXFhXf5wjCRovm7vvf8AAq4HxEtz572yJ5nztv8A7rLXJU5pyO+jE4fVJHtWRJkZPM+dvkqnJdTHfJs5V/mX71XtYbdutoUkdNzfKvzf8B+asuFZtyzQo27ftlVvvVzyjM7oyLFvNNG3mujS+Z/D/dqzZ3ELRs7pJsWXbuX/ANBqpH5PlrcvbSRyebtTbT4Vh+a2Tdne0rx/3m/2amP940lHmiWlv3jOxJpHZX+Vf7u6ofHTG4+G2uG4JGdHuw5PGP3bg1VWSRZn2IzBmVW3fwr/AL1XdYhF78P9Qt5WGJdNuEYjnqrCv23wLnzZ5mH/AGC1P/SoH0fCitiq/wD17l+aPyq1PVHabf5e3/ZqlDdvDumR9n8NX/E2jvZ39zZzSNuhuGX5vl/iqlPapCvzphW+ZK/OYfAfnsiRdYmjX55mqpJrE03Dvn/ZaqcxfCp33fJTJB8+08/3v9mr5fcJujXtdchjVUfcP9qtSPxFprQ/fX73yf7Vcltdm2fdX+Gnx71XZ/7JU/ZGdO2oWDbd6LuX+JaZJqkLLsRFT+JdtYVv8o+/81Wo28ydXd2qpS7GZPNqTIu/fuNVbrULmTdJvbC/d21JJH5iu7v8u/atWLXTrZnH2x9gpf3So7EfhfxlrGg3QubUZVfvV1+m+PPD0twXm0eTfI/zNI9VdH0bw3Lb/JD+9X7/AM/3qmuNN0f7Tss4W/22kquX+UOZHq3hTQvCvjDw+88KNE3lMssbbf8AO6vD/iR4TfwbrUkKcozfumr174WtNpuj3Ezw7UX+H+9XL/GzS5Nf0ptZCZ8v7jLTl7xl76nc8Wu5nuJi70z+H/2aiT74/wB+koOvoFFFFBoAXbxRRSbflxQA5V+b79G35s7KSljUSHZQTzMlLbgP9mpI49zLzhqjVDJIz/3as2qozLv6fx0+Yk1tFtst52xSqt8tafiS8Sx0V0L/ADSf7dQ6XZou35N/8VZPjS+Sa6FjC/yx/eWp5kZKPNMw6WNcsOPlpKn022+1XaJ/tUcyOk63QbEW+i7OvmfNuWmSQ7/uJvq1YzIzLZu/lIvy/wD2VOmhfcyo+F/gb+9Sic0tinNbv9kVH2/M/wDFX318aW8n9gPKk8eENKA597evgib/AJ47/u/xV96/HBHf/gn+yIdpPhDSucdObev1/wAMFfKc8X/UNL/0mZ9lwpf6nj7/APPp/lI+HLeTzIQ/3m/36WSNPMTyf9ZWbYXzw/u3f5v462I7q2k2I8K/c3J8lfkX2D4rnKiw+XP52cLvq3C0O4/40k0fytsTKstNsVeORpN//jtKOw/8JLGu1fubd1WdLvvsrbPO2DfuqJ4U4m3sN1ElqjbRsyy/N81HxQFzWOjW4S6t/wBy6qV/iasrVofs8jfP5u75qsaPcRtGE+4zfeWjVoy3zp97ZVxIt0OQ8SMWtpfn+Zv4Wr7P/wCCYuvf8LC+CvxF+DP9pNHqENhHrehqv/PSH/Wbf+A18Ya03mQzpNDtb+CvWv8Agmd8crP4NftUeGdT151OnX1xJpuqRyPtT7PMu3c3+yrVVKUoz5hVqfNStE+spPGniG61jQbnxVC1tHDE2y4ktfmm/ut/u16Notnbap8MPG3gPVdS+2Pq1m15YKz+WsMy/N5i/wC18tfoqP2Qv2b/ANuf9lfQrDTbLT9M8V+H7C4t7DWLS32RfL93d/vfLXwNpnwr8efsu/GSz8JfE62jtP8AiZfZ7ea4bcskf3Wk+avpcdg41sNGvT/7eifP4bEVKdX2M9+h8R+JNWdbrfv3qybfm+XdXOXmpJCwR3+993/Zrv8A9srwqnwx/aQ8U+CbaRnt7e/+0WDbFXdbyfNG22vIpdUhLDfuY/3a+e+E9SN5Q5TVk1KGPdDhnVv4lqzY6gmVdN29v4d1c1JqTtJ+5dfvfKtS2usPDI7+c33/AO792lGRUoSXuo72HUodzlLZl/uRrXvf7JtytzZ646k/6y34PbiSvlmx14xxoiTN8zfw/er6S/YmuRdab4iffuPn22T+ElfpHhN/yXmF9Kn/AKbmfU8DQtxLRf8Ai/8ASJHNfEeVf+Fga3G0zZ/tCYnaM/LvPy1kx3dvcKEdPmbavmfxbqg+KGqiH4na+EkUeXq04I2/7ZrNXU0m3+d8oj+Z1/hr4vPdM7xX/Xyf/pTPnM0p/wDCnW/xy/NnSR3iKoRHjba6ttqU6g8cm/zt7K/3a5y3voVZE8xVWP7q7P8Ax6rJ1RGtzPMiqm35GZtrf7teZzTjE4o0/dNDUL7zl865mX5V+633q5261RBMYflG1t21VqtqGsfu8fKr/d+b+H/gVY9xrDtcb0mXc3y7qzlI6cHHlnqbDaluUoibE3fxfxUf2jD80r7drOqoqr826seK68yRZN+4/e+WnySbVaPzP9Z8ytv+7XJL4j3qfMbFxcJHGv8ApOwf3l/9BpY754pPk+Td/CrVmNdPbqmxFbbtV1+9uqbdMzbEkjwu5nbZUcvKbSkdv4V137O3lvcq4avTPBfipIbUQzXPz7PlWT723dXg+l6s8cImh+Tb83/Aq6jSfEyKqvc7V+X/AFi/N81RKP2omVSUeU+nfC/irav2bzsoyf6tvuq38NddpviosuLm5aQRtuSNW/h/ir5v0Px15P7uabarL8rbvmrstL8b/MiQzfd+dZG/iqJR7nJKXvHtf/CaPDZmCFFkT70C79rN/s1j6t4yd45X8tdjff8A4v4fu159N44eRhsust/e37VrD1b4geXE01zMsTN95fNaspU+aIuaETyPR9Q8ySPekar/ABx7vlWu18MyRxxkpHGi7trQx/Lu/wBpa800Wazjjaaab93v2/L95t1eheF2+zLE+/7vy7pP4v8Aer6ytiuX4TCnh4/Cdz4d+SFYRGqbk+633q67QZEwyOnlt92KPZXFaXHDPIJi6zbfvyb/AOH+7XTaXctDGk118qK25Pm3Nt/hrjlipS1NpUYna6PNMzf6TN/d2SbdtXZrVGzcwhdk27zV3/8Aj1Zmi3Ft9k3wTNM0fzOv8NaUdul5tSY4LJu8tfurXFUxQ40jP1SzdVR9m8wozbVfcrVgavbPJ9y2kVpNvy/7Ndmqp5aRu/735l8lkrH1izdfNtoZt25/3Uf/ANlXN9ejGRUcLzS0PPPE0aSs1zbbU/e7Ny/NXL6jNNtaBPlP97ZXc65ZwwK8fnKzb2b7u5d1crqFrB8s0Ls0rfK3y/K27/aqvr0u4SwvvfCcdq19DF/y7KzxptaT5l/4FXMzaw7SKn2lsruV2+6tdN4ktUjt2hd2UL8u1v4q8/1z/Rrp0+Zn+9tZ/lX5a6qOM9oc9ShKJZuvEU1uqO7/AL1W2/L/AOhVj6lrl3H+8eZm+f7tUZtcmt7j5EX7nz7qydb1qGWNnfqtdUcR/KYSo8p9V/Da43/s1rcMTj+x708+zS14fod9H5aO+7Z95Fkr2P4S3Ak/ZPjudxIOg3zZ/wCBTV4P4T1Kfy/J87Lt9xWT7tfrfiXU5cpyT/sHj/6TA+04shfB5d/16X5ROys5kjZHv3VU/vL/AA7q19Pb7Psh/wBY33l8z+7WDp80/wBoieaZXXZufalb1hdeS3nO/P8Ad2fxV+PyrcsviPkYx/mNjS/JUqn3nk+9D/s/3qstskZn2KVb7y/w/wCzVOxWa4Znfa0W3d8v8NXo2RYWm/5d1/u/e3f7tc0sZL7RtTpkcnkRxb0h2S/ebbu2r/s1x/xRhhuPhvroebLNpsibv7rN/s/3a7ia4eOzZ0hYfL/FXD/FRobL4Y69fpCskq2DN/d8tdy/NWf1qUjWVHlPjH4qX0Nnb29hCjfKvzf71cAzfx1t+PdZfV9ZeZHyKy9O0+a+uRFGjGrjEmPuxuFjb+fKBt71vW+nvDb8HczVs6D4Ff7LvkTa7VDr7Q6XCyIMndtq+XlM+aMjG/fecyO6k7/u1oaTapu+eFqw7jVEZjsRvlpIvE15byB0fil8Ivfkd5Z6I8n+p2hPvbv4v92pI9Njt1i33Knb8zs38NcpY/EK/DeTO+1W++y1c1rTLnV4vPsdaDI23YgpylzClHlOuF5YSL9j/tKEj/rrUV9pMOuWv2aYK8ez5JF+avO5vDWuxMXhDOF/iV6m0xPHdsv+hw3RVfm2/wANTHnKjGO5V8S6DcaLqLwn7u75aypGfOxq3Nb1nUrgbNVsSHVf+WifxVhzO8jbmpGsRaKRWzwaWr+Iob9/2xSMu2nKu2hl3VAC0UUVcZAFFIrZ4NLRHYApeVNN53b91LUAAbdzRSKu2lrQAooooAfHHukXf0avW/2VvA2m/EX46eFvBmq7fsE2qRy37M/3YY28xv8A0GvKLH95IN/G2vev2WfDepWV5P4wsJZEmX91ayMn3W/i2/8AAamXu+8ceKkoRPrL9rbWP+Em+M0/iq2mV7aZVit2V/uwrtVV/wCA7a+xf+Df74jWfhL9q7WvDd5qvlL4i8HzQMsn7xZGjbctfn7pdrc3V5/aXiR8xwp92RPvN/er3f8AYB/aAh/Z7+Plt8WraFbiHSbK4/0eR9qzNJHtVaxp1LS55HiOXOfqr/wU9+I3grW/2cZ9GbWoY9Qk1G1Sytj9+4dHBcD2VQx/Cvys+Lut61Dd2elWDEpHG00fmyfJFIx2Fwvc7Rg+wFbni74q/E34/fHKX4n/ABL8fxXGZ5hpPh6zi2W1jAUIAX+8395q4r47WllN4itZ7y8nVRp5QxxvgYLNz9a/YqWJ9t4C4yf/AFFJfhSHFezkctdWaPdP/aXiFX3Kqsqy/Kv+7WJ461DwloHgvVHSaNy1rM26NNzM3l1Pb6f4es1KfY1Xau5dz7ty1zPxq8QWui/DPVb+zhVCulzRbWX5fmXbX8+r95Vi0VR96rFHzp8M7d4/DsE3k8ybm3N/vV1Mm+HOxPl+9838Vc/4H/0HwzZwpD/rIl2bWraWZ5Y/33yn+61fUwjoerU+ImjjS3jaZJmK7F2rVSS48kF5Plb723+GoLrXLaPMP2nZtfbtasa+8RIvyQ7Sn96l9rQXLGRqeIviU/g3wfdJbJH9ouG/dTfxL/u14TeXc1/dSXly7O8jbnZq6D4iatLfXsMH2reiqx2BuFaubqY04xlKR2UafLEKKKKo0P0g/Z7/AOUbif8AYl6x/wChXVfm/X6Qfs9/8o3E/wCxL1j/ANCuq/N+v2XxY/5EuQf9gsf/AEmBw4T46nqFFFFfix3CMMjiloorQBFXbS0UFd3FT9oAooZfmye1FPlQCt+7au1+BWr6bo/jb7Zf7d/2C4W1Zv8AlnN5fytXE0b3Vg6Nyv8AdqZRJ5UbUWnzLdPc3k2597M0m/7zf3quW8F42rrq763J5i7dszP8/wD31WENVuQhTPBqM31y38bCr9zlMOSrzXub3xDvbLVtcTUbYbpZrZWum37t0n96sBd67t9G4NIzvTJF+bmp5TeO4L8nCPU0bKmE6bv71RbTu+SrEMM0mfumpJaufS3/AASn8K/8Jh+338LdKmto5IYfEa3T+Z/0xjaT/wBlr9w/Fd1CLyWZ33edcMySL/eavyN/4IS+CpNY/besfEkyRvD4b8L6hes0n/LNmj8uP/gXzV+sd9Ntt/kfeJPvKz/xf71ediJe8Yv3nymRdN+7d/m+V/7n3qyNSie4ZY3s22sv975lrS1BrZbqSGO8Zwvzbf8A2VarXiw3UaTfbP3f/LKNflaSubm6s6oR945XVrVxG6PbZf8A5a7n+Vv96uS1LSUhYiZ23yP8vlv81d/qcJaRke2XLbvNb+Jq5i8sZppJSzyJMqfJtiX5f9ms5e9E6qcTzTVNHcRo6Iqtt2urL92sSTT3jZ7Peqn7zbl/75r0DUrFBueZY5TMrK23+GsO6tLZQ1s88hRtvzNV/YOnlOVW3uo4/J2fMsv72T+FarFZlZJ98ed27zFb5q3NUtUWHfbQt838O/5WrNuP3yt9p3IJNv3fm2tXLKjKUtS170feM2SZJVdEdkZpd25futt/hrYMYk8HTwncN1nKPlPPRunvWTJHtaVBMuyN9y/P/wCPVtGQjwxNLvPFtIQynkAA4r9p8DoyWf5jf/oFqf8ApUD6fhWFsTWl/wBO5fmj8z/jp4bfwv8AEi/heFkt7iff+8ri9auNtqnloo2/w19V/tUfClPFnhd9dsH3zwt8y+V8zf8AAq+SNehubeQWdyjK8bbZa/MsNW54nwWIozo1PeKD75GX5/4ql8t2XYNtQK22T/Z/u1Pbx/effk/3a7Obmkc/2B8caeZ845+7UbMiyN89SeZ5cZb+Gq/yeYetMB5zHJvdKuWsbzN8ifMv391Vlj/eM7u2Nn/j1aFnC8O19jb/ALz7amMeYiUSXb9nVt6bvk3VWvbx5JlRH+T/AGaTUL6ZZGh34Zvvr/dqpG0zNwn+/RER0Ol3lyq70euo8P6XNfTRo8n3tv8AHXJaLE8zhN+0f7Ner/DnR4fJ8z7Kqbfli3J/49T5eUcubkN1NN8nSbews9rH/lrtqa+8DzSaTNvhVk8r/d+b/ZrrvB/hWHb9qmddy/N8qrtatPxBbJcM9sj7Pl/u/LWspGEZfzHxF4r0z+yNeutN+b93K33qz67j4/aGmj+PJtnzCRPmb/arh6zO+n8IUUitupaUdiwpfmWkpFbIpgKW280/bvxsprIFApwY5L0uZAEP3q09LhSZvnXH8Py1ST7wrc0O3TztjvtpmMjXhaGztn+fbtT564nUbp7y8eY/xPXS+Lrp7XTvJR23M38X92uTUEDBoCnHqxa1vDlm6yNN/Eq7k3VmW6+dNsrqtN0/ybXydm5/vfNVfEVU5ugkbfZ2+fcf4q1Ix9ot/kRhu+b5qz5V27UgjbG/73/stW7G8Ty9nzGp5eU5/iJLq12oHTlv92vu343K3/DAzIDtP/CJaUPpzb18NSRo0P3GX/gVfc/xtLL+wW23kjwlpf8AO3r9d8L/APkTZ5/2DS/9JmfacKf7nj/+vT/KR8BTxvCyom1j/eqxYXE02Wf5T92msJvM/efKrUscZjbfvr8kifHmowk3B4fvfdTdQJplk2b1H+z/AA1Bp9w6N5fysy/xM1W1jSTLvH83+zR/hM/cFt7hJJFhcM396rEcyXEOzO35dvy/e21Vh+WPdv2r/eqZW24dEZ1/j/hpa/ET8USW2vvst4IUT/crZuv32ns/3dq/erHWRJFXCfd/iq3HdTSW/k/xL99f71WP4fhOX1uHbcOkLt937zVzeg6hJo+vLdrMyvG+4bf7y/MtdR4i3qx/2v8Ax2uEupdt57K3zNWZpT94/pW/4Ik/tBQ+NP2c4YfOZ7q4sFVoZvlVZNu2voT9rD9mbw9+1d8HY9N8SaD9j1zT1ZdD1KHbvaRfuqzV+Q//AAQp+P1/pug6n4S1LW/Ljjuo2TddfMq7fl2x1+3n7Hvjf/hZel6n4Ytk+3JZ3SvdNJ96Hcvy/wDAa9rDY2q7QlL3Tx62Ejyua+I/Bb/gsB4BuvCPi7wN42udNjtru60OTSNZXdul+0W7fK0n+8tfFz6om77mx2r9qP8Ag5A+Adgfg/qHi3QdKkF7perR39vNDb7vLj+7Krf/ABVfh7PeeZJvd2wq/IzferjxFOVKVgwdT2t2/iNBtQT75TD0+TVv3Y3sy/32WsRrzaF3v8rURX/y7C6tXLKXKd/L7x0On+IBGyfI2zd8rV9Wf8E+9QW/0rxQMcx3FoC2c5+WWvi+O8eP597I33v9lq+uv+CaV19q0fxa2zG2eyGfX5Zq/SPCX/kvcL6VP/Tcz6rgqMVxFRt/e/8ASZHB/GTxA9n8ZPEsSsny6xcDkZ/5aGs/T9e8+HZcj5W+ba33v92sL496zJbfHPxWqP8AKPENyG+X0kNYsfiiaGH/AFO4/wC196vjc+/5HeKS/wCfk/8A0pnzWZ6ZlW/xS/NnokesI1u8aPiKOXcu2ql54utoY2mdFdV+b71cTL4gu5G2P9xvufPUcEm6b53Vf71eVLl5jijGXLdHR6h4oe8uNiPsVvurVdbpGl3u+1ldfl+9WRHMkb70RmLfK9SrJD5g2fK38TNUy5eh10ZRibsNxuZHtn5bd8uz5asRzKJFV3z8rfwVjreTf67+997b/dq3b3CQwvshbd/Buf8Ahrm5UejTNSNvP3Ike7b9z5qk855EWabav9xVqlDcboymz/f/ANqprfybnL/ad+5v87aXLzQOnlRZWbyY49n3G+/u/vVLDrU1vJFcw7flfbtVqrx3Dx24heaNdy/Nt+am/Isfr/srRTiYVNzsNL8VJJCH3qfm+9u+9WzY+NJYZEdvM2TfxM/3a82t5prfaJLZm+b5FVPmWtG3vH8tf3Db2Rv4/wDx6rjRjKJ5lao6cj0abxw8cH7l/mVNr/Nu+WsHVvHE11sthcsWX+L+7XL/ANoXkm5C/wAkabfv1QvLp9y/PsX5tu2q+rmPtub4jc8N3/nN8k22Vfm87dtr0Lw3q20JeWyKjN9/a+7c396vFdAvkvJV3/IzP95a9G8LXkcMm9LmTcqbUVfutUylLlPa5Y/ZPXdNvoJLdJkmxNvb7vzfKv8Ae/u102g3iKySJu/haVY/m215roerPCyPbTN5jbV27vvf3q7DQdY09Llkjm/e71Xyf4vmrmlKrGI+U9N8P3kMkiO53fLu2r/FW7p8kNuqTI7B/NZ9sP8AF/vVxnhfVEVQ7uqNHuZP727+7XU2sk21XdN25lZNvy/99V52IxH2Tqp04yjHlNS8/eIHmST94+7csVZetNc3Mb7HjhibcvmSf7P92r81/wDZ4mmhdn2/M+77tZOoQwXG25SGQ/P8kO/7teRPERp/ZPQo4X4XGJzmrW6CZC80kT/di3fdkrnNW0n7K32a5Tzl3s8Xz7lX/arttSW2uI186Ft0jbVWN/u1gaxYpbwCFEZF+98vzK1Y/XPaRtc7f7N5o8x5Z4s0/wA6N/k37dzN5ny/NXmXiC1ma8dPO/g+evZPEmiu0ZkmTbL/ABqv3a848QaDMscySIy7U2v8v8NevhMRyzj7x5OKwMtzzbXN8DbHTcy/NuWuZ1i+/ct+/bGz7qpXba9pqLan7yuvyu1cL4is33M6fJ5nzV7lGp7/ACnhVKfLLQ+t/g5M7fsbxzE8jw5qP6NPXzn4LuHZk3zMDv8AkZv7tfRPwZVl/YwjWTk/8I3qOf8AvqevnDwbavJIkL7sL/47X7T4mK+UZH/2DR/9JgfV8XK+Cy//AK9L8onovh+6haYQu8jJ/A23+Kut0lkW1/fIu/c3mqz7vl/3a5bw3ZpJMqIq4rr9NjtoZFTDSmZdrMv+zX4zWj7x8jGVjSs1+yx70Thv4d33alWN2kZ/J+6/mI3+zRDawtc/Pcq7xp86r/6DWlY/vI1mdP8AVozbv4v92vPqc0TriVdszW8n7najPuikkfd97+GvKv2nNQfR/gz4lmSZUT7EqIv+823bXr+pSQTWCbHkQt8yx7N1fP8A+29qkP8AwrtvB+murI1wtxesq/N5m75Vb/0KscLGftb/AGS6ko8p8c2ts+oXXzx16b8O/hskdv8A2lfosQX7nmL96rPwp+Ef9pSf2xqSYgjfd/vVsfFr4haP4djOiaJcruhWvaj7vvHDLmloYPjDxRZ6DZvDCMbfl+X+KvLtV1i51O586SZsfw0/Wtdn1q486Zv+A1TjjeWTatH95m0Y8sRA27mlVNxwtaGneG7i8RrmUNFDH/rZGX7tLcLa225LBPN/2mo98Ob+UzmVwv3KvaNr2q6PKv2a5YJv3eX/AAtTFjUE/aZsf7NT2MkNq29LbNKQuc2JPiB4tkj/ANG2xjbt+WKoY/EHjCST7S+q3CfwsqtTH1CTyRDsX5vm2rUtja3OoTrDIjEyfcpxjzGXNyxOh8F3H/CQLcaf4ks47kMnySMvzf8AfVc94w8DxafC2q6RIrx5+eFfvR11ENna+HdP+zWzs1zIn72T+6v92orfTWmt/wDSXWGGT77NTFGU+c8yTr+FOZc8irWtWq6fqk1sj5Ct8jVU8z2rM6h1FFFXyoAoLbeaRjgcUn3/AGxS+0A6iiijlAKKRjgcUK26iIC0UUVQBS/wfjQGK06P5uBQBs+DdHu9Z1mPT7OzeWWZ1ijRU3FpG+VV2/71ftV4F/4J3+BvhT8B/BeiXnj+1stStdDt5/EelzWSvI11N80nzfe3Krba+Lf+CBP7H9h+1f8At6eGPDviSzkm0Tw3FJ4l1lVi3L5dr80as38O6TbX7GftOfA/wR8bNcuLl7mTRdRsb/fLdWfyrdL/AA7l/wBmt6NOXJzI+czKvzVeQ+Nvjh+zL8KNDtYJ9H8yRI0/dfKqrIrfxNXlX/CpdE0+3lhh1JoYvvrDGi/99LXrfxw+E/jbQfEt14bm8QzSwqi/Zdz/ACsq/wAVeUa94V8VaOxSa83n/lky/wDs1eXWlVcruJy0Y04x0K3gjRLPTPH9qYZixEUm3Emc/Iai+OFkLjxNav5W4/YAuP8AgbUvw90i/tPG1pPezksEk3Koyv3D3qf4z6bNf69a7GYKtqudrYx87c1+uYRSl4AY5f8AUWvypGp57Do/zJN5zSBVrzn9qu6Sz+D2ozIP9c8cDbf4dzV7JZ6LNHNvdFG35XZl+aSvFv27o4dL+F+n2aO2+81mON1ZPuqvzV+EYelz4qJthOapVPGbXUP7NsYFs03pDEqv/vbap614m2/6h8Lt+bc9Y9xqD/ZfOSZv9nbWbJcvNIru+6vqua8D1Ix5ZNl3UteeZV/iP/oVYeoaxcySMiOyt/6DT7q4eBf9YrLWbeXCMv8As1jKXc0jsZeoSGS6+/uqKiT/AFx+lFaHTH4QooorMZ+kH7PP/KN1P+xL1j/0K6r836/SD9nn/lG6n/Yl6x/6FdV+b9ftfit/yJcg/wCwWP8A6TA4cJ8dT1Ciiivxg7gpVXc2z86bt+bNDLupR2AWkZc8GlpCd33KYC0UcAUUAHBFFFIq7aAFoop0XQ/Sp5gE2utJRS7RxUk8yBPvCrunrukGU3D+6tVkV+Plx81amhWvmXsSf8CoJP02/wCCAPgN4bP4pfFqaHZtgsdGtZlT+83mSL/3ztr781K4hW1eF32bX3bVr58/4JBeAZPh7+wPot/qttHFceMtcvNWuFZPm8lW8uJm/wCArXvF9N8zIm11/ut8qqv+9Xj1qjlVlEr2P2ipIsDEW0a/NGjN/ebb/tVTmZ/mTyYWeFG8pmX5lp02oom+FIdv8PzN/C1V7q6ka4MPk8bf9Yr/AC1P2TeMfeKGpW/nbP3zfu/71ZWoWaTKfveZ97zP4q244/OuFR4coqbnbf8A53VBdW8zQyTTfw/xRtu21nP2h20eXVo4rWtNn3O8KNv3/LHt+XbWPcaGvkul5tz8uyNlruJrNbpnRz/B91U+9/wKsjU9M3Wr/I27ay7Vf722r5eZeZrLb3jgtc8P+Swv97Db9yNfmrIvrfbGJkhkTsrL8u1a7W6t91v9pghXzVT51k+VlrCurSGS18lHVn3/AN37y0f3pGManL7pyTabbWcjbIWU/eVmrSEAtfDckLsJMWzkkchsgn+tTXlnbW1x/pKK0km75mXau2mFEXQXRWJX7O205xwQcc/Sv1/wPSjxBmLX/QJU/wDSqZ9fwo08TW/wP80eP6to6NbvZzRM6zf61f4d3+zXxX+1F4Rs/C/i50sLZk86VvN3fdr7zks5lmltvOVlbc27+Kvl/wDbS8FfbLdNehhwGdvu/wCzX43ga0frNuY+azCj7TC866HyzjZIJuOPm+arVuyM3nPJz/s1DJsjkZHTd/vUscaRtw9fRR2PnV8I+4bco2f+PU6GDaocbWbZUW794EdN1aAhRV3pDllT5FqeXsIYsfl7UT5lqVrhId3ko3/fVKtv5m5If++qRbcx/wCyNnzL/FQKUftFSRTN87jeW/vU+GF1+TZ/F/DVq3hTaqI/8e75kqaOHMjb0Xb/AHquOxMvM0fDlvuugiOzru/hr13wbeJp6hHRSsfzfNXmXhGFGukT5VP8FepaT4fudQjRzD5QVPvf89KvlhIUvdgeg+F/HWmnT3TyVRvuouz5q1F1ZNSVPs1rv2/Ku6vO9N8O38d8qGaT+Jm3V1+m3Ft4f0nfdXKs+z5VZvm3Ue7E55e8eKftdeG3VrfW0h27fldv71eGV9G/Hi4m8QfD+91KbbvjZW2/7NfOVKR3UZe4IwyOKWm5+7Tl+/8AlSNgpf4PxpvCr9KWgApyLtGKbUi/eCPSlsTLcsQp5kmE2/7y103h+12tvf5f96sDS4ftEjJs2LXSTSf2fpst191fK21BlLnOe8XXz3WqPDvXEPy/LWTSySeZKZH/AIvmojj81tnrWhtH3YmhoVr5lwH+b6V0sDeZu+fB/iVazdPh+zWq7E5b+Kp4ZHT92nCt9xqXwnPKRbbZIvkdNvzbaqLMkbHzH+b7qLV+P97HvR+dv/fVU5oUti00yKxZ/k3fw0c32SY/CXrO4eTYPOwy/Ltr72+M4P8AwwiwVhx4T0zBb629fnzHqLxyZfa3+zX6B/GNz/wwX5mCT/wiGlnp3/0ev1/ww/5E+ef9g0v/AEmZ9pwp/uWPf/Tp/lI+EJIfOc7/AOL+Jvu1UVvvI7tlfu1o3UHmKiPDtDL/AOPVWkh8uTzkRTt/u1+QR2Pih1oqxMUT5T/FWlZzWytsebcW/wDHay2aGQbNnzN/d+9uqeONI5hv+/IlEtgNONi0eyFMj+Kk8yHy9/RFqrHJ+8+TduX5amEM3yJDyjfeanHmDkLFvIi/xq39yjy9w853Zf8AeqBYHjff53Ozd/u1ZjuIW3v5e5W+/T5gMDXm8yR1PCx/+PVw998t0/b5q7XXJjJcSw7GVV/ib+H/AGa43U+bpuMfWpl8WhrTjyn0x/wTC+Kt18PPj3ZNE0ZS6XY/mf3v4a/oJ/4JLfFm/b9o3WvDd/Nutdc0tVXd8q+Yv8VfzHfAHxs/gD4k6V4kVGcWl/DK6r/d3Lur+h79gnXtN1CbRPjHoOpXUdvZ3Czu0e3/AFLL/F/7LXRTqRjGSZ5GZ1pYaqp/ZPq7/grP8B4fjJ8C9Z0q003znuLCSB2V/lk3Lt2tX8p/j/wnqvw98bax4E15GS70fUZrO4Xbt+ZW/wDQa/sNuNc0r4nfD3UtGmmW5+0WEn2K8ki/ds235Wr+U3/go98MfE/w5/aw8VXPiRGE2rapNdbvK2fxba9CvaphYzj0OTBuEMT/AIjwncF++/y/w/xULM5ZUd9oaoVkeRt4jwF+5T1VJG2F2+X+9Xl8x7XwlppH3Nv+5/dr65/4Jhn/AIknjBf7tzZD/wAdmr5B3Oy/O+1v9mvr/wD4JjBho3jAnvc2WP8Avmav0fwj/wCS8wvpU/8ATcz6jgxW4jov/F/6RI8K/aFkd/j14vTZwviG6+b/ALaGuYhuk2tJNwyptSun/aGL/wDC9vGEQ/j8R3Q/8iGuVt43ZdkKfKtfHZ7/AMjvFf8AXyf/AKUz57M/ezCt/il+bL0M27B/vf3vvVI1xMuVT7jffaoFd1Vn8lS1I0yKoR32mT5f+BV5RxRiXvMdlR0+UfxrvqzDN8xm8lXl+XYtVF+aRX8nPy/dWrkJ8tvJh2nd81TI2pxhGZcw6/6SkLNtT/V76uRs7Qr5gZd3/fVVFRNu9H2t/tVcFvuX/WY3J96uf3YnoU48pat5oY1XyNyfI2/d825qtQpCu1IUw7fw7arWscPkjhm/3atWak4KTNt+7tb+GseaZ2x5uXmRP9nf7OcP935fmpV2Qr8n3vvbaSDf86J/vf71OY3PmB4YW3Knz/PXQc9YVmk8zzng+Rvlfa9TW8iRzK/2n5I0bcuymNC0IfznwG+43+zUkEky7Rv37fmfd92toxPExHx8shsk1s1uZvmXd/EqVQuoyJF2eYq7/uird1HuZdm1U/2fl+b+KqepSTbdnnb/APgH3avl5Tm5vsnPafevJMiQ8FW/1jV23h/XE8lkd9jL825f4a8u02abzF+dv95a6CzvgzB9+4158ZfzH0R7N4b8UeXHFvuV+Zf4fvf71dx4X1u2WcOkqpuX591eB+H/ABQlqu+YqpVPkZa6jRfHASZvMm3fPudW/iWolzSjoVHl+0fSXh3xNDJHGiPHsVVbds+81ddpWseZBKiJHs/56fxLXzjofxAbzBNNMzpu3RQ/3WrqtK+IlzJMjw/Id/zs38S14uKjPm5kexg4xPaZPED2zLDpupRsrNtljb5mZf71Nm1aGa9DpDDlbfDbXb7v/wAVXndr4yeScv5yn+Hcv3m/2q0rPWnvo1fZsVW+fd8vzfw14lapy+9I+nwuHv8ACdW115qx3LvsK2/zq38P+9Ve4jcK+z96qt86slVLNk8s2yQswk+/N/eqz50z/Om5VV/lXf8AeWuD20paQPTjh6X2jntctdyp+6+Vvlf5vu/7VcLrGl3MzSpbOp8ttu7/AOKr0XULX7RE0bwsgkfcn+9XMalY2saumxlddyyqsXzbq9PBS9vM8TMKMactjx3xho/l7vJ2qfNbzd33a898Sab5TPEX3BX+Rtle8a5ocLK7ujOm3b8y/wDj1ee+KPDbrumRFLLuVGb+7/dr6/C+9HU+IxUZc/wntHwstXh/ZB+yuo3Dw7qIIH1nr52+H9rDJfKl4/l/JsXd/u19M/Dm3Mf7MYt2AH/EkvgQT0yZa8C8G6XMs2/tvXYtfuniW7ZNkn/YNH/0mB7nGLf1LL7f8+l+UTsvDum+T5bP5Y2/Krf3q7Xw7Z2zWZSNJDufbukT7y1j+H4XaSOGEfO33a7LQ9NeO6Z3RSZF3f7tfjMj4uPu6Faz0+ETNsfcJN2+rEMKRwzQ2z+bM21UZn2rtrSuLN2meF4V2fd3L92orC1ht9014uyH7zSMm7btrjq04y0Z2U5cseYk8RWb+E/Ccvjm5RWWH91b7l+9J/u18q/Ha8m1XQ7m/vE+0brhXlbb8zfN/FX0N+1Jqzt/Ynh2N5vsn2fz/LVtqyfL8rV88/FCF5PBt8lh9/yv3Sr8zVth6cIxM/bSqS0+E8w8TfEKbQ/DZtdKfZuXbtjryG8tda1u9+1TCSRpG/irqm17TftEUOp8ruXzVb/0GvY/hd4+/Zp0eEP4q8K3F5L5W1FjZV2/7taR5VK8hy9rH4D5/wBN+HPiHULhE+xvhm27tlddL8ONF+H1n9v8eSeTNs/0ezX5pJG/vN/dr174hftIfD3SbO4sPg98PbW2m8rbb3l187r/ALq/3q+bvFF14h8QatLqus3M000j7mkmatfaR2gKn7WWtQl1zxN/bV4ttDttrb+COH7tQMqbWS2/76rJWN9x+RhRHJcq2yN2qNfiNuX+UvJZlW+d1ct/eqwtvDCux32t96qEM0zN8/y7fldqvW7PMy/e2/3m/iqjOXulu3td0Y8zrXcfDXQ4Lq4abZ86xMyLt/irkbE2y/O78t/DXf8Age6/s2MO/wAiM3zs1KK5SeX2m4y88P21jm81KZlTzd27dXDazrU2u6t9gs5pPJjf5F/hWuh+JniIaxeyab4c3GST7+1/lVawrfwvqXhvw9N4hubZi4X5G/u0x/DI5vxQ0J1hvI/hVQ/+9WbvX1p80jyuzzNlmfczVEy7aDoQ+iims2G49KBjqKKKXxAIq45NLRRR8QBRRRRyoBFXbS0qru5TpQy7TimAY249f4qlt4/3io/FRLwu+rOnIJJgnks5Zv4aXMiJS5UftF/waW6JeeHfi18RfGGzamqeDZrJmZFZfLh2yfe/vbmr76+OUk2jeLnvHdvKml2QMqbVVq+PP+Dea0s/g58OvGOoaq7Qy2/h+3tftEa/euriTzGj/wC/arX1d8aviJ4eutLXUrq8hfyWZoo2dV3V2U6sPZHyWKcqlY+WP2uPFmm2vjCz+23W77VB+9jh/wBn+KvFtQ8ZWF9uhO1Sqfwv/D/u1e/aY+JWleNfHxtobCREt4ttvMqbl+Zvm2tXlmqeIobXc8L/ACqrbG2fM1eLWxHNPlN4e6jsvCd79p8XQBJlK5l4Axn5TT/idOsWt2wKZLW4CnH+0a5X4TXsl14+thKQCEkxj+IbGrc+MG9vEVoI5FTZaZZm92YD9RX69gqkl9H/ABjf/QWvypBF8xl2947TN8/mlX3bm/8AQa+bf+CgGqRyr4Y0dbmRna8mnlhZ9y/d+Vq9xm1pLW1W5mbfKvyytH/F/tV8sftha1c6t8QtKtJm+W3tZGi+fd8rN96vxHCyhLERR2YOP708xuptyhPu1VuLpFxAn3vvfLRcSOqtvfj+7uqtdS+XGHSGvbl7x6luWVitqF5uXf2rPvJtu3f92rV1Nt++/wArf3apNvaPe6bl2VXulRKv/LWik2/Nmlo+E3CiiijlA/SD9nn/AJRup/2Jesf+hXVfm/X6Qfs8/wDKN1P+xL1j/wBCuq/N1G7H8K/afFZXyXIP+wWP/pMDhwnx1PUdRQw3daK/FDuCimqMrinFd3FABRRRV8qAKKC23mkVdtMBeCKXadu6hW29qAGOMrml8JMgY7jSUm75sUtMoKXcdu2hhtXFC4b5O9Zkx3JLdXDL/tVv+HLCbUb6Kws+biaVYItv8TM23/2asGNEUAua+hP+Ccvwgs/jP+1p4F8IahCz2f8Abcd7qP7rcvk2/wC8b/0FaitUjTpyl2FGMqlWMUftB8LPDKfCn4K+CfhpDbLEmg+FLOzlb7vzeXub5f8AearGrao8m5ESMxfeXa235aZ4s1ya61y5nv8Ac4kut0S71/1bfd21zepXG75Em3H+H+9/wKvlI1faT5n1PWq0fZqxY+1TSTK7vG6r8rL/AHv7tC3xe4TyZmX+F12fK1ZbTJdQt5txk72+ValtZPKuFR9vyr8kn96vQjLml7xzxp8psxs8lps2YfZtiqOZfs6ukn+ysvz/ACtUUN00y/67c6/xL/DUUc1sqrv5dnbey/MrUc0fiOjl/lHNC/kult+7WT5m/vKtZVxax3VvK/3fkbYzVof6M2XgTcV+XduqrfQwrvnTb9751/u1VPYVSXKc1eWexm3zbmZ1bayf6vbXPajpqPm2T91tl3eZ/tV1OrfKuxAzs33Fb5WZf9muY1SN4VZz5mJG3RNu3L/wKum3LHU4+b3vdMO+LtL0YozbU8z/ANlqs8Z/s+SJ4wuY2BUdB14q/fX1tJI1tNcqrRxfJ8+2qJIFi5WTOEb5j+NfrvgnCEc7zCy1+q1P/SoH23CElLE1tf8Al2/zRxDQ7bib7NZqh835/wDppXln7Tngv/hIvBNzctCryRqz/wC6teyzKtxdBP4Vi3blTduaub8SaDYa1o89teJJ/pETJLGybvL+WvwGMpRqxcTzJU41sLyH5ma1pP8AZuoTWbx7vLb726qGHVjv+Xb/ALFegfHTwj/wi/iq5h+7ulb5dteeyN+89q+zpfvIRZ8hKPJPlZF5iLGe/wA33qt2uqBCUf5l2VR2hW+T71OVZNy7Dz96nylG5b3yNj58f3Vp7SR+cz7Mlqxo45t3lp/vbqtWt1tk2TOqlv4qqJlyovbZuyZ/2qmWR2Vdgz/C6tUEVx91P7z1PD/pDeWtUHuG14ZvktbpXdMbf4a9k8H+NIVhS2ePLRpuVVrwuzjeGZHM25v9l66bRNUurVvMfdj/AGmpR934jOpHm+E9d1bxheXV150MKqq/NtX+9WPdapqOrXBmmdid21I/7tc3H4301secW3t/Ev3Vrb0L4g+G4VSaZFkdX+dvu0+axPw/ZJPiJpd5cfDe9sPIYLJB95k+avmaWNo5WRhyvDV9jTeLPD3izwq+lWd1Gr7Gby2/vV8n+ONGl0XxNd2Uibdtw22g2oe7LlMeiiig6QopGOBxS0AKn3hUsKuxb/dqJRuNTwr90VmRLc1dBgeRlTZ/uVP4vvHhtEsy/Lffq14ZjRlVJk27v4mrn/El4L3VJJE4VflWq90iPvFGtDQ7dJJWebd/sbapRQPM42c1p6aqJMLZ+mfvVRVSX2TV/wBav31X/wBmqu37xt/k/df5KvrDHJG1Zl1vt5tnzfN/DS5oxiY+zNfS5kklG9MBvlqe8t/MjCPtcqn8P8NZek3yeds+6W/vVrwsk0Z+fYd3zNRHYqUTFuoXjuVdPut99a/QT4yyFP2AVkB5/wCEP0nn/wABq+D7q1RszI27/ar7t+O+6L/gn3J6r4Q0r+dtX694YO+U55/2DS/9JmfYcJv/AGPHr/p0/wAmfDdrfPIoSZP/ALKpWjSTbcom3a27bWHZ322b+Iqvzbm+7W1FeQSRkQzZLLX5DzcsT4zl5ZleGN4WPnJ96rS7WjDpub/e/hpVt3ZmTeq7v/HabHHPCzb/AJt3yoq/w0fEHLyj44ZIPn61ZhWaSPbs2/J8lQpHcsE2dP7tTRs63P32/wCBU5e6RERm8tvJ27mZPmajzNsbDG35PmZadNHM0iu83H8LMtRXEyeS6Tvhv71KS5g+EwdY2bpX35Lf3a5S7YSNsT/x6um1aZ41O9Np2ferl7hjIx3n+Kj/AAm1Pcn0a4+yX6TbsfNX7L/8Ek/2jE1r4A/8Il/as00iq1vdNH8rfL8y1+Lu5lO9etfaf/BJH40P4Y+KqeD7yRtmobVijVvvSf8A7Nc9enOpSlynnZ5hnXwM0j93f2c/2nIfB9mnhLx/rW3TpGVF/vQ7v4t1flv/AMF+vhDpWofErVPiL4PuY7m2s71ZUa1+ZWt5vl3V9k+NNHmttmq6PMxh2xs/z/Kzf/FV4R+1X4Bf4neHdS0G7f5NY0aRJZJt3ysvzLt/2t1edk2ZV6K+qVz4PJM0q/WFQqfZPx2kVFdvkZX/ALrU+Nk279jbm/hqbWNL1DSdSutKvE2y2c7QOv8AtK22ooY3/ubW2f8AfNe7KPQ/Q4y5o3LEapIzBOd1fYH/AATLVRo3i9lGM3Nl/wCgzV8iRqiqd4ytfXv/AATQTZo/i4KwK/aLLaR/uzV+keEqkuPcL6VP/Tcz63g124jor/F/6Szwr9oREPx58WsIW3f8JFdfN/20Ncqruql9nzf3Vrrf2g02/HjxUSvH/CRXTf8AkQ1y/l/N5ao3zPuRq+Ozu39uYpf9PJ/+lM+bzPm/tCt/il+bEhk2rvTd8zfdp7N5279xt2/xNU0UE3yps2/xfL/dohgPzP8ANhv738NeV9g4/thDE7TMd+1fvPWhZq8knyIu1fuVWjt3j++6/wB7dVm2ZCwT74ao+yaxj7+hoRnyY9nys392rlmz7hv2tt+bczVRtm3SfIm1v4GarUNvtkCXO5mX77LXPKPMenSiXY1Rt8ny7W+6qtViz+aHzH3I235lb5t1VYY3WRZoYf49taNuzs2/f8v3flT71R7stjsUuYkt0RvKmcfJs+6v8VSJavIxcXjOsKfOuz7tLHC6xo6fOf4dvzbf9mp4ftKr5zn5G/iV/vf71MwqR5veIpLXzJPkTcu7+L5adHbw/Nbfd/ubamkj8lmd02bfvfxUNb7pN6Ozf3G2bflropy+yeNiqc+a5VlRVjXcfl3Ns3VRvFRYWfYvzVpXSo2zzNrfN91X/iqheQpbyfu9u2T+Gteb3fdOWMfe9483jk2t53nNuZ/lWrVnceZGzzIw8tdu7f8AerN+0TSSI/ULVu1k3R/I7Lt/iavLj8J7cDZs7942CbF2qv8AC33f96r1neeSyzJM27+8r1gWd0/nNbOn+sXdWjaNtwkMfH3dv8VL7HKb05cx2Gk+JHk+RJpCy/drtvDupagVXZIuJPl2t/DXm/h9X85/Mh3f8D212vhu68tt8FzGjq6/eWvKxkf5T6DA+9a56N4dupvM2TXLLtTbF/d3V3Hh2J7yQv8AbN8qrtddm5WrzzQ7pFUeWi7mlX7RJIm5v+A16H4UmT90j7lfd8nlrXzWIp8sZcx9Zg5fCjsdPheSNHm4Vl+RVT5d1aCwokiw7GU/eT/ZWovDtu8ccXnD5l+bb/eroY4Zl+fKurfN5a/w15sOaM7HrcseXmObvrFIIlmtkVZF3fvJHrA1C38u3E15bfvmdmVlbd/FXY6pp0LM38C7d33N22sfWLWFYRD9mUuq/eVfvLXtYX93seHmC5tbHCa1b7reZNi+az7fvfK1cT4i0O2mhZPJVPM+7t+bbXpfibSUtZNk0Pzt/CzbfLrmr6xhW3eG2jYyt9z+Kvq8JKPLzI+Hx0eaXvHWeDbZIfgObZwNv9lXYOemCZK8b0nSU8zZ5Klm+ZG/h2/w17l4bt1X4Sm1miCD+zrhXXsPv5ryzTNPSGIPCih2/i/h21+8+JbTybJE/wDoGj/6TA6uNLrC5e1/z6X5RNzw/pbIsdy6LFu/8d/2q63TbObc3yW+9UVd275mrnNLaGHykdN275d0f/s1dHpMiXDBLZ2bd/49/u1+Oy/unxMXyllYxeKZssiL8sqr8u3bXJeK/HGm6xcXOm6NNI0FjtWWOOX/AFjfxf8AAqPi38RoPAfh+Y2dzCb+4iZIoV/5Z/L96vO/hGZodH/tW88wtqkrPEzfLu/vNWEufnOipL3Trvj1O+seE/B3jmGZjp+tadvi+0LuaNl3Lt/2du2vCPFGpJ5MlhMnzN81er+LtSe8+C9/4G1PUma58G6tNPp27/lpbyfNtX/ZrwyS6e6U6leJuVk+Vfu7qJfETTly+6zwf4j6Fc6X4onhSNtn3kb/AHq5zzrhR99gK9X8dXmm6lqmblNzfd/3VrmtQ8BwszTWsy+Uy/eD1fLM6+Y5O31a8t2DpMwrptB+ImkC3Fh4k0fzkb780Z+asi88I3NuzbHyn8LVQm0ieKTy/MUk1oP3ep3LXHw11lv9GuFt2b+Gaib4f6VJH52m6layqz/djlrgJLaaNv8AVtt/vVNCupIuYJW/4C9HNL4ZC9mdPefD+/hdvJhU/wDA6rN4XvIVR3TarJ/frGTWtXtFBS8k3f7TU0a3qTf8vLf3vmalze6HL/MdFa2cNuyPNcqrK3zr96tqGR7zZD5jOFX+/trirXVn8xZJpuV/vVv+HfE0K6pG7/Ntf5lb+Kjm5hcvuHoOj6Homh2f2m88tJWVW8vZWV4k8TG8Y6b9jj+zN9+P+HbVu8l03XLhZodWjSST5dsj7aIfDum2sJmv7nzP7qq25v8AdojymSl/dOOl8KeGdVsZFgdoLn70S/w1xF3aTWd08EowyttNeu61oNna2ralZvHEf4l3/Mq1wHjaSw1K8a7sCvmR8S7f4qJfEbU5HOAE9Kcq7aFXbQzY4FL4TYWgNu5oYbutIq7akBaKRjgcUtXHYAoopdjelMA/g/GlaR2WlWPb99PmpfLf7j9aXKjMYoI+VDx3rtvgl4bh1zxnbSXO1orX9/KrDcrKv8NcfBD8wXNfQn7NXw5tlsV17UIZEEj7tzL8rL/drGtUjRhqc+KrezpSPsT4K/tTeMPgp8H7jwX4SSFJ9a1ePUri6b70e2Py1j/4DVKT40fFH4hak954q8W3XlRsyxQtP+72t95tteZWlvNfXCb9uyN2Tds+bb/dWuhhjMNq6JNHskdfNbZ8y14ft6tSR89GpKT94t+INavJr4F7ld6t96Nv4W/9mpVDzfJMm1t38TVWhhsLaZEuRHMytuSNl3bv96pri6kmuGS2s1iT70rNUSlyxL5TrPhOnk+NrOPaD8k2GK4P3DWj8apnXxHbwRKNzaf95ug+dqzfhUoHjqyO5WzDJtO7LY2Gr/xyuDF4js0W3Z/9Dy2JdoI3txX7dlf/ACj3jeb/AKC1+VIPhjocfJpthYyNc397uYJ86qny18k/tYapZ6h8cJrW2+VLPTo4k/8AQq+n9e1D7Pbb5n/hZU+f+H/4qvjn4uXqap8U9Zu4Yfl81URWbcy7Vr8Xy2PNX5jtwP8AF5jAl+b5KhvIXaFkRMLv3f71XI7dCux9oP8AeqvfXibWRP4fvf7Ve/yo9P8AxGRNb7c1HI22H50w1PupH3NDs3f7v8NU5pnk3I75qYxNIkH8W+iiiqlsbBSL8u40tFKIH6Qfs8/8o3U/7EvWP/Qrqvzfr9IP2ef+Ubqf9iXrH/oV1X5v1+0+K3/IlyD/ALBY/wDpMDhwnx1PUIztOXGRQ43nJpvXbTq/F47HcG7c2+ikVdtLTAKKKKzAR/umnK3bZndTX+6aFXHAoAcVY9qP4/xoY5bikKbuDxitCNmFFFL91PrWZYbG9KGb5VoVttG3a3I+Wq+EB9vvZxF8vzfxV+kH/BDX4O3lv4l8V/H54Gb+xdLj0nTm3/KtxcfNJ/5DWvzp0S0lvNQiVOBvX5ttfth/wTn+E/8AwpT9jfw3Z6lCsWoeIribW9WVdysvmfLEv/fK/wDj1eRnGI9jhH5npZPhfrOM9D2i+iSTe8zqvmJ8vy7q564VFbek0b/wsy/w/wC9WjqFwkrMjo0bK38T/My1l/aobVmfepLP83y18jha04e9I+ixWFK3lo0ium3K/wAS/LuqWOGDKb/m8v8AhptxMjYh3xosn3I9/wA1Ekc23y9igfdXb81evQlzazPFqU+WZFJqU0V0qTcIqMqMvy/99VHcalOWhdHYKr/Ky/7vzLTbqRvu/Y9vlptfc/8ArP8AarMmZLaTZbTKBvZZWb+Gu2jHm91HPL92bK6h51u00M21v7rfe/2qguNWhmV2srnczJ95vlrJtr2G1mebC7PurJJ95qikvN8b3EyMPL/5ZtXdTpzicUqnMTXEyTKby2TfIyfPu/h/2qwNTXzpnR7yPa3y/wCzVu9voZIVkdGiVUVtv8SrWNqV15as7w+Zt+Z2+7t/+KrflMoyKF02mx75kRS391lVmZf726q0eZdIbY28tE2CR1JzVHWrx5IHhhmt2RX2fu/4atWEijQvNReBE5APtmv1vwVhFZ1mHL/0C1P/AEqB9twfK+KrP/p3L80YDTTRwxrsZlVGVFj/AIW/2qxtckuLyGR9jJIvzMsfyrt21cmaG43pM7I7MrLtes7WryaOxmyVZ9jKys/zV+A+zlGem55NKtFQPjL9qyxhvtWluUfL+a33a8EmaRZG2c19EfG7R/t2qXaIkbM27ZXgeqWr29w8KH5l+X/Zr6ihHlpRPm6kuarLmM5bd3z/AHv9mrcMChc7GojVmb9y6/Kn3aGmeNtnzf7u6to+8TLm5hsjeSqpDTIVQyF/4qV1dm5p3lPtH8IpBIsQs7Kp2fN/erSs5DC2/ZuaqFu3SP7wZdtW4WSNU3/+O1UiTSsZE8xYXdd33t1dJo+n/wBqYh8ln3cKq1ws2oeQ2U5K/wAVdH4K8bPpd0iO+4fd21PxBL3Tb1D4d62rb7aGRU/grJvvC2vab99G/vLuSvXtH+IlneadDD+53fxbv4qW48TaVds/nabC6q/z7YqKcomMubmPIdL1zWdHul4YfP8AK392tTxxodt470p9VgRVvIV+bd/y0rubzw34M8SSBLbbaT/e2yVb0v4S3Nq2+0v43j/uxtTj8IlLld+U+XpoJreZ45kwV+VqZnJ612/x08G/8Ij4sZIn3JcJv/3Wrh1XbWnKdsZc0RQ27mikVdtLSKFVX3Vf0/5mEOzP8W6qEbDdnexrd8NQxzSMmzlv4amRlM1ZvJ0/RXmLsr+V8rVxrM7MXfq1dH43uBbwx6bF/F80tc/b2/mZfY2F/u0+ZFR90uaX5MJCTYNXJIyJt43bfvfLWXHHNHMuz738O6tKKRmjG/70dHvmcpRNfTZHaHzmh+X5dtQ6pbuqibY25vut/dqzpsyCLe/z/wAPy1FqkbqvD7xt/v8A3aI/3jP4fhMmS4fbnfyv8VbmkyOzfI+Rt+7WE3yts7/xVoabePbrscUw5u5u3EMzKP7lfcnx4Tzf2AJY1bGfCOl4I+tvXwzZz+fC3z79yfxV92fGdFk/YLKBcg+EdLwP/Aev1zwud8pzv/sGl/6TM+z4V0weP/69P8pH55tG8bfK/H92rGlyfZ5EfDLt/wBqrF9a/MxRFX+7uqlI3lrv2NivyM+LjLmN9bxJI/kjbc38VSrJNNJsT/vmsSxurlWZ/lxWnZ3+66SEv87fM9A5fEX2WONw7o26mf6tfMfduqe6kmjVU37hsqHb5g+/8mzc0jPQOQ/c8ny+c2GT5VaqepL5MZLpu/2t9WZWeM/PD5x+6rf7NZ2qt5a+c52qz/dpx5+UmXLI57WLwtv4Ynf96sNvmYvWxrVx95E/i/hrGpG9PYK7/wDZv8ay+CfizomvB1RYb+Nvm+796uAq1pN09nfxzI+Nrbt1AVI88LH9I/wh8P6l8Qv2WdJ+MGm20NxYNKsEskfytGzL8skleaeMvAt/dabd6zoFy0otWZ/MjbdXD/8ABGP9paH4ofst6j8B/FuvNCjQSQXC/wAW5V/dN/s/erQ+HPxI1X4P/EK8+EXxIvPtFvHcNAl5JF8qx/7VKrk0cTR+s4de9H4j8rzfBU8vzRTjpc/Kr9sfwOngv9obxCiWzQ299dfaLWNn3N8y/M3/AH1ury+H/VHen++1fdn/AAVo+Dtm0cPxL0HTY9kN1Iktxu+aaNvustfDNrCjf6N8oVf7zVvJNwiz7nLsRDFYWLH6evmN5bpsZfu7q+v/APgmmjx6L4tV8Em4sjke6zV8kWquzNsO5t33m/u19df8E2Tu0fxa3rc2fH/AZq/RvCX/AJL3C+lT/wBNzPtuClbiSj/29/6RI8Q+Puz/AIXj4udl3ga/c5T/ALaGues7W28tZndlMn3K6347Wu743+KF2L83iG5bcf8Aroa5lYUVgmzmT5V/vV8dnvL/AG3iv+vk/wD0pnz+ZytjqzX88vzZFJFuVk6fPtZv4qfDG8ah9/zbPu7PvVI1m+7+Jtvy7qdItzHGqQo2Y/uNXly5Dh5ve1K0mRF9xgu75FqW1VFXL8fxf71KqpMrb933/m3Utvb7d0kL7t3y7aykbU5e9EuW7ozJ91P/AGWrluPMk+d2Ct8q1BZ2/wAo3ov+0tXrPfErO+5v/Hq5/dPVpyLdtHDG6QpM23b91qsiGG3xsk3Fm+dt9V7fzmwiSLtZdv8A9jVq1je4bfInG77tZ8vKdnN7vulm2berQxvsff8AMy/dqzFb+ZD+8TaqtVO3CQt86YVW3ffq1GUWFfOfPybmZf4qqP8AeOeQeWjTOk24r/Cu/wD9Bp6yPFtZ9zJs+6vzf99UkLQvJ5zx+Wnlfd/i3f7NSQySLC8O9Q7fcbfW9P3ZHjYzmlsVpPmKOm5h93b93bVC+mSNf4dsO75t1X5Fe52vMmfl+9/DuqnqUNmpZHdWRtu9fvKrV0nHGPL8R5Uv2m3/AIN2779WbX94uxw3/AabIqLIGj6VYhx5yuifK38P+1Xi8yPoIx5iza26FfMjjw7fKlaNqmZEfHy7vnqpDCkaq6SM21vvN/FV21hmkf5Pvf7VRLm+ydtGJs6KqW7KmMszfP8APXXaLJCtx5Pk/LtXczfwrXJ6Xa7sfZnzI332/u12Whx7I0y6su/5mrzcRKZ7uFj2O38P3Ft5kaI/Ej133hmaFpvs0ybfLb5Nz/NXnGiyQqyRyQsoX+9/E3+zXX6FI8zR3MN78y/wsu5m/wCBV4FT3uY+jw8pRPVvDdwY40hm+5G+1tv3q7W3jE8KXMzttk+WJa8z8P3SWsjW8KN53yyvul3K3y13fh+dJIUciP8Ady/Iv8S15vLGnL3T2Iy5oamm0LtbvMm3cq/3Kw9XtIZVR32n5fmkX5drV0Sf6n5EVir7tu75mrO1KztmWR96/Km5vk+Vfmr1MJ73unkYzlOLvtPtriTznSRvMRt6yfeWsTUNDtre1kSGTe3/ADzX5q6rUtPuZpGfzl+X+FnrEu2dGNnBDv8A4UZV2qu7/ar6bCRltFnxWYe9zOxpaZbKngk2rDj7JKDg+u6vOv7L+zq9ym0Q7ti7q9Mso3fww0ccQDGCQKue/wA2K4u40+aRdkyNG2zcyr/DX774lTtlGRf9g0f/AEmB18YQ5sFgP+vS/KJm6P50MSQwt80n3dvy1f1jxJbeGdMa/mudrqn7r/ab/ZqnfWv2PF4qM38TfJ92vKPil44fULoWENyxSNPlXf8Aw1+Pz+I+Epx98wfFniDUvGXjTfePubdti2/N8v8AFXex6lDoun6H9js1kSO/aK6VU/1e5fl/4DXGeCbWG3sTquxvNm/1Uezd8taOoeJLO10G60q5dkmuIN1qu/5lkX7rUpR5Y8pfNzfCHxU1qw0fxBBrdy7Q2mof6LqNuybo9u75Wb/0GvFvirqiaDeTW2muzWDfNZf7K/71d54q16z8UeG5X1iFsN+7aPd8zMv3q8Z8UagmszS6VNNJ/ovyru/i/u1n7ppGP8xyt1cTSSPc3LttZ/4arWfiLU9LVw/zQ/3m/ho1C6muJnt/ubf4Veq1vIkjPbTfP5ny1fLzGxsQ69DeQ75nU/3qq3C2cm14UVNtYOoWt5pswTe3ltSQ6xJ8qSfrSDl/lNCSFAweb/gG2qupahDBH5EMK/7bfxU2S6RkZ8sStUJ980hffndVy+EqPvfERySNI2+kyGHBWpI7V2Vn9qlW12rh0o5UXzRKx+4PrTo5HVg6NytTpa+YSWX/AIDUn2FF+4agRu+GfEkc0KWV583zfJu/hre+y6k0zPp82V+9XBw27rcfI+K7zwnqTxwoknzv/C1BlL+6QXi63dK9hczMEZP4lrNTwy9vvkfaVVf4l+9Xd6hqVh5av5G41SuLVLiT9ynzN/DVxjMiXus8jnjkinaKRMYblabXXeOPCr731K3++v3465Gj/EdUZcwUUUUe+UFFFFHMgClCljhaWLofpTmyozioJluKu9k+ROf4mpHV2P8AdajG1dvyt/srVizs5riZIURvm/8AQqrmROx0/wALfh5qXjzxFDpVnDuXer3Df3Vr6+8H+B007T4dBsvM8mPb8v3d1Zv7IPwt0HwP4Q/tjxPpM1xqGobZfMX7sK/wq1ewx+KPDEcM8KabHskXam5f/QWrxMVW9tK0Tw8RW9tU5bnLNoOsRKYXSOLa/wArf3f9qpbXw7DbyKb+WR3/AI/9n/vmtS81rSmkRHePYy7nX+Hbu+WmyXln5zbPlK7m3L/drzpfvI2OL3Y+6VLeGzhVvJhWU793zf8AoNQNcuN3nbd0n3vL+7Vm4VJmZzMyKvzbt/zNUDKnzOY127t21azlyx3kXGXue8dP8I5JpvH9tK+zYUl2gdR8jVc+P8xi8QWvlJukNiNo/wCBtVH4PFG8fW0kM8mDBIGjZePuGtH46zRQeKbKWcttWxyAvc72r96y3ll9HvGf9ha/KkF1Y4G38OJNG9/fuyBn+Ztv8VfEvjG8e88fa9eRupaTVptu1dv8VfaXjjxVZ+G/D9zf/bGxJEzvG0v+rbbXxHDsvNQurxPmWaeSRmb/AGmr8ey+MT0sD8LZA0jtu86b73/jtQyWPmR74d2f9pq01sxJGziHb/D9ynR6bMI9mF/4FXsnb8PKYjaTCy797fLWZqNktv8AMiY9q7D+x3klDuMLs3bW/irH8Uaa8No03b+GlKPKXTlzHN0UUVB0Cb19aWiitAP0g/Z5/wCUbqf9iXrH/oV1X5v1+kH7PP8AyjdT/sS9Y/8AQrqvzeZscCv2fxW/5EuQf9gsf/SYHDhPjqeotFFFfi/947gooopgFFFIzeiVmA5RuNCfeFNf7ppY8pQAqv8ALx+FJIibsRmlYfNj1pKqQCLv705/vGkop8qAKXc8h+akUN61JCuXAc/epe6Znr/7F/wUufjf8efDfw9SFtmralGkr/wrGrbpP/Ha/cXVobC12aboO2Gxt4o7eyhVfljjjXaq/wDjtfn7/wAEX/gz9jXWvjfqulRuLGBtO06SZNv7yT7zbv7yrX3tcSTRwmYwN/u/3a+Bz3FyqYzk+yj9A4cy/wBnhPbS+0Zd5dFf9GmdX3S7E3N826s+4uHjLQ2ybv4n3fdq1fTPCsyJCwT5WfcnzbqqTL5jOmyOXdt/3vu/drxvby5/7p6lbCxqcyZPZw/MP9Tv/wDQastH9li/f7RG3937y1nxslvMieS33dztv/iq4l1ugX7TDtT7zru+7XbTx/tDyamB5djPvvlaO58jcGfbtZvmZa5y8jtlhUuV3+a3y7/vbm+7urqdcuraSMzTP/HtXb/DXK6tdQq0mLzlfuLs/wDHq97A4jueLjsM47le6kh+z7+rRv8AKq/w/wCzVZtReONv9Zuk+/UF5qVszF3diknzI38LLWHfaw8dx5KO2N+1vl+Va9unUj/MeBUjOJfvtWCyeT5zI+z/AJ6/NWJq2rbiYQiq+7d/rdytWTNfP5zfafl3S7dq/d21l3195d2yfaV/6ZK3/wAVWr2MeYtaheHb5lsixuy/vdvzbq2tJmz4OE20nFtIcMc5xurhptYDbUuU2M275V+V91dnoMsZ8BiQfdW1lHJ7AsP6V+w+DEEs5x9v+gWp/wClQPs+C5Xxlf8A69y/NHHXF8kMgjAyqqzP/stVC+urmPTbl3TzX8r/AIF/vNTI7yG4mMz/ACrJubav3Y6y/Fl4lnodzfpc7HZGX5X2/L/dr8QnTjz/AAnzNOtywPl79orxYmizSwr/AK64VlRm/wCWf+7XjGqR/ao47nfncm7dW9+0J4o/tzxlJDCu2KNvk+euc0u4e403yX/hr1+blhGxwy973ilGvlMU2fx0SRjdvd8VbktNqPsRmP8AHt/hqGRfupsz/tVp7nxEkDfu8fxUsMjtJv8AO+X+7UEkjqp7/PUTSOq1BUY8xr6bG810uybhv4a2JtLd/wDVpXPaXefZ5ld3xXVaXrltLb+X90/3qr7RnLYzbjQn+d0Rv+BVW/s28hdc7d/+zXSeYny/xf7NTR29sy/6j5lp8qDmMLTdU1iz2p5zKyv8ldNo/jbVYfkmDAs/zs3zVnNBCy79i/K/3Wpyy+T9yH733KOWURSkd7peoWesR+TdN5TyLteRflauk0qy1u2kjis79pQybfv/AC/8Cry/T/tPnJ/e+9uZq9b8B6x/Y+hvquq/c2/Kv/stHwwJly83Mef/ALSvha5m0i21sbWMPyy7W+7/AL1eG19A+NvFln4j02/hvHzDMrLEv3tteATBFmfZ93dT5uY3pjaKKKDYlgP7xQ4rpfDS/Z5Xnd9u1Nz7f4a5+xh3Scjd/erpppIdL8OvKj/Oy7drLU/FIwlvoc3rF9/aWqS3Mjs3bNWdJk8hPJcKwb5ttZ0a/NvFaenw/aGXen/AafxDkJdKizDZDt/2t1TJvjZf92ri6Wkm7ftbbS/2eVXGzHyVXwkcyHWd5/y28j733lqSZluY2hdGVKgt4fL++mV+7uVasrC6t8ny1HL9kPd5inJp6s2+Onra+WRvmqeON5ptj/LUv2fcuxIfm/vNT+EYiK8b7Iptvz/ItfffxpkC/sEGQN/zKOlkH/wHr4E+zuuU+Yn/ANBr75+NikfsCldhJHhHShgfW3r9f8MP+RTnn/YNL/0mZ9hwp/ueP/69P8pHwVc3HmTeS6bv92qzKm0O6NtWrKo64kmjxt/u1Ktv5keOu75ttfkMvePjI+6VIYfMO/qKuW8yWr/6nll/75oht1jbYE+XdTVh23D/ACMF/wBqlzIcpcxM19959/zbPu05pn8vYlRRRw/65x937tS/IzB3RlH96q5Y/ET78Szbtt43/wC1/wACrN1Ro2V/kZt3y7anbzlUun3W6bWrPvr4Q2+zf/F/FSBRly2MHVJELkbPutVCb5tz7PvVevpEkbekP3qz5Gz/AANQbQG1NbofMXZ96oMfvAuKt29u7SeZ5O6lzIuW59k/8Et/jvN8IfiNaSzXMf8ApE+147hvlZv4a+0/2kfiFpHxO+IVvr2laCti8lmv2xd3yNcf3lr8r/hZdTaRHFqlg7QyRvueRU+avuv9m39qnwl8TtDtfA3xIeG2v7WLZa3UkSqzNXtZLj6WCr+/8Mj5DiDKpY+HND4j2ib4C+Lfjt+zbqr6xon2qw2TW9vMqs22RVb5Wr8qNa8O3/hnWrvQdSt/Jns52ieH723a1fv9/wAE4Lyw0vUPEHwP8c38b6R4os9thNIq7d23crK1fkh/wVO/Z3f9n/8AbC8SaPb2fl2GoXTTRMv/AI83/Aq681p4ed50jmya+H5KUtP8z5xjV2kZIfl/3a+tf+Cb8ax6L4rC8j7RZ8/8Bmr5PtY3yHL4WvrD/gm/s/sTxV5aYH2iz5PU/LNX1XhN/wAl5hfSp/6bmfqXBcubiSj/ANvf+kSPH/jox/4XT4phdWA/t65ZX/u/vDXNeX+8TyeS33Gk/wDHq6X46KX+N3ikAKSNdudo/wC2hrmbeSWEbETb/CzN/DXx2ef8jvFf9fJ/+lM+czPTMK3+KX5smaP94d78L/yzqKZf33nI+x/4lo+eSTyelOaP94H35aRNvy15EY8pzS+EZ5PmL5z+Wdz0+1j8uOSZPlLP96nRqkmLZ4fu/fVf4aFLxx5Taqfx7qXxRF7seUnhj8pw/nfe+9V9bvy32Q3OF/2UrP8AOdV2I6/N8u6pI7h4/wDRn+f+F/n+9WMonqUfdgasMnkso2fP/A1WfOeXY/k8bvnjX+GsyG4+YR79qr/eepIWQqyJ5gMn/LSN/u1h9s64yNX9yqu7ybwrfd+7Uy3HnSMU3Afd2t92syGTcu9JtwZ/96rDXD+c6Ptx975aOb7JFSXMi5DNMriF0+6/zsv3ammkSSP7m1N38X3lqrDMi5jmPLL92rMcz7i/7tg3y/NXRH+U8rEcvLoElvJJE3+kfKv91KgvFT5/J3bWSrZt3+zo6Pv3fwx/w1XuGfbvNzt3ffVlrWP8qPN+H4jziS38lvs2/wC98u3Z/FT7ddzYdPm/2qmmDyXXz7nH8bbP4v71TLbozoifc+9uavO9n7vvH1FGUZFm1tHhUb0q6tvLEyYT73/jtJZ2qSRpv4b7y7q1bO1hkXycNt/ibbXFU54nsYenzajrGFFy6csy/Pt/vV02m27QwpNsUs38X92su1tUj2wpIv8Ad8xvlWtnTfkXY7/xfNtrzMRKUtj2sPTtD3jf0ffeTRpC7blX/gK12uk3Dqrwv+7Rvm8z/ZrjNHj8pjcv8is+1Nr/AHq6XSrh2aJNi5b5WXf8qrXk1pc0j0MPH3dTuPD+oGNkd412qnySfxV2+i6l5LJvlVopPm8z7rV5npvnW7LM7sqb/wCH7q11mk6o7SDZ8qL/AHk3bq8+VP3uU9WnU5oHpFjqFtIrP1SN/mk+781OuLx7iMpD99lVmjkSub0nVEa4/wBGufkX+Fl/hrQbWkuoRDPc52/eaP8Air1cLyR908nGe0KOsN5as8fzyt8rbfvVgTR3NvdSO6Llfm2s/wAv/fNauuXEKRsm/ak33Grm7i4fznhR8L/Fur6DDxjGPMj5XHRkdLZO0vhws7qSYHBK9O4rlNQeHy1+zbm+7v8AmrpdMkYeEPNVcH7LIQD+Nedav4gfT/MmmmVEW33PG3y7a/c/E+dsnyFr/oGj/wCkwPQ4sV8Hgb/8+1+UTI+J3ij+zdNTQoVZp5FZmk/2a8Zjs5ta1x7Z7aN2kf5ZGbayrV/UvGVz4m1S7ufOzE3zW+5/ur/dqxoumx28L39y7O+35G/551+UUY+6fBS+PmiaV00el6fsRPu2+1FVvu153qF9NqV00zyeWsabUZvmrd8SapczXImtpv3XlbW/vVwPjLxFNbw/Y4PkLbmZvvUv8IfDEg8aa88+pBNNmZ45G/f7V+61ch4wuIWmZLN95X5dyptqaG4CwmF9z+Z/t/drDuoprC7aG8m2/eZG3U+VGvumJq+yS3+0pDsm31jCZxJvR/m37q2bhrm6mZ/3bNvrKuoEhbzk/wCBKtHwmkYwN+3WHXNNRJpl3Knz/LXP6lphs3x/dq7o+rJHebPJ+X7u6ta80+G8h3w/NL/GtEthfCcms0ynDpuX+61TwTQ/LvRfl+bbUmp6bNbybmh2lv4aqbnjYj7rKtLlLi+Y0LeRC2/Zj/ZpfLRVV3+9Wesz7Vbdt/2hUv2p41+/u21JPKX1lRYfkeopJ4Wb7nH3qprcbv4G25p3mfMU/wDHq0KLPmJ5n31Vv/Qq3dC1B4WTY+0qtcyq7vnT+GrtrcvHJ/wDa9TzGfunWzao80yeYdqfera0uZJFb5Pu/c3f3a4+G4eTYm/dtrs/D8Pmafv3qZPvfN/dp/4SZDtUt7aS1Kb12f7VeceMPDK6XMt3bPuWT+Fa7LxRq0Ufyw7vlTa9c1Oj6pb+e4bbt20xxlynKUUs0bwzMjpgrSUHSFFFKoy3NKWwDo8fwVIsacv2qFW29qmjhdvv8/3afL9ozGLHuY8fLXuf7LXwQfxtqEfirUrZvsVnKuxWT/WSV518NPh7ceMdWFu7+VbxsrXEzf3f9mvqf4P65Z+D0l8N2yKLaNldVZPmas6kvZnBjK3ucsT6T8M+B9N0nQXcW3nSyRbtu35VWsW48J2GqaeiJprW5+9KsyVf8P8AjKfVvDdvMkzErAq7o2+9838VLdatquqQmF7/AHvu+Xy02t/u158qdOOi2PI5eWJyN94NtmZprBG/i/h+9WXN4fubWT5/MSZk2vt+bbXYw6s9vdPD9jZ1Vfmk/i2/xUNqGmyXzH7G0x3ruaP+7XP9XpSYbHEfPAsqO7Hc2x/M+9Un2tFl8lN27Z95q6S+sdHuL5U2SKGfCKyfMtMutC0pXb99t2/M/wDs1wVsLLnL5eUf8HXup/HdrIV+RVlB/wC/bVr/AByis18Q2l5dTqoWwIw/T7zc0z4avp9v43htYDGkjCQnauDJ8hri/wBsvxJe6b4m07SLVwBNpRc+o/eMM/pX7tlaUPo+4tf9Ra/KkONPmlyniH7RXjhNQ0u5ttKdhCsTbG/i214V4V0vdpaXOyRvnVV+eu8+K0k1v4XuIZgrSySqqNu+7WF4RtdukpC+0D7rfw1+R4GnyxZ6mHjy0hI7JFPkum4/7P8AFT00lJJvnRf+BPWs0KblgHzbaoSW80k29ywNehzS2NY+7rIhuLP7sezlf+BVz/jK2hbSZnSHdtT/AL5rr7PZIp/c43PtrH8eafDHo92+xtixMybaPekX9o8nf7ppaKKZ1BRQrIV96KiMQP0g/Z7/AOUbif8AYl6x/wChXVfm/X6Qfs+cf8E21x/0Jes/+hXVfm8rbq/avFb/AJEuQf8AYLH/ANJgcOE+Op6i0UUV+MHcIfmbfmlDbuaF2c7aRV20viARVw3PpTqKKXwgFKvQ/SkoqQE37mNLRSMu6r+GQC0Ab+1FLyppgCr8xra8DaNNrXiC20yC2aZ2lXbGv8XzVip94V9K/wDBM/4JXPxd/aO0W2dF+zWc/wBovWk+6sa/Nub/AGa48XWjh8PKb6GmHoyr4iMP5j9O/wBkr4V2vwh+AOg+D7Z/Ku5rL7Vfq3/LOSRf7v8Au16ZJYTRtFvdWeP5nk37d1TtY/6Y+91fa+1WVPl2/wCzU50/7Ux3pIrruVm/vf7tfk+JxXtsRKUj9mwuHjh8NGPYwptPudqfaEZf3rb2j/iX+GqFxptzbskdskjf34d/zf71dra6enmGZIV/3W+61V9W8PvI2/ZM3mRN8y/wqv8ADurnVb3kE8PS5eZnE/Z3hk2dW3/O3+zUkk025Sibm/jaRflkro4fDcPkh3h8ot/e/iWs28sfLXyU+8sW7d/Eta0anN7xy+x5o80jmtUmdeX2q/3lVfmX/drk9WvLP7cIQ/kzSbldfu11niJYbhvvsj7dybk+b5a4XxNdQzaeZHjUFX+ZtnzN/tV7uWytK72PCzDD+7oZeoX6XCv9jdl8t9vmLWRdXVzMzO9yxMb7k+fbU91ePj7mFVNqqv8Ae/vVzepas8MzTecu5l2Ov8K19Lh6nQ+NxlPlkWNUmh8tn+b5U3Osf3t396ub1a5xb+dvYlt3zN/Ey1JqXiBJo3tkRS0ifejasC+1yGRt6bmk2/xP8terT5pcp5FTkJr7VHmjjmh2tti+9/Etej+GcN8L1/e7wbCb589fv140upQyfcdt3+y/y1654PlVfg0JnyoGnXJOeoGZK/afBtWzjHf9g1T/ANKgfW8Eu+PxD/6dS/OJ5nb3PmbPs025ZpW+X+7XLfFnVJofDNz9jfbui2/7taUN4beM/eUtu2bf/Qq8++KXiqG3aTTZtrvMm7y2/wB2vxrllzHx8ZSkfKPjpXk1y4uX++0rfM1UNGvPs0zF/utWp423yaxK7/cZ91c+spinVk+YK+6uiMfd5TSJ0/kyRq7+Tjd/erKvpHjwj7sf7NaEN4l1Ypvm+9/drMvPm3OjsW/u1X90jl98pyNlvdqjkx/B92pJJHZgmxai2nd8lSaRBt7SeY74NWLXUJoW3+c23+7UTQzMN/3qU27r8nf/AGqr/EBuWHih0Ub03D/arb0/xG8jNCm1d1cRHG7fJsartr5sbLNsb/dpc3KTI7LzPtDb9iq33dtT2VruzNlX/wBmsfR7xPIX52P+9W3p94gbyUT738S1rzc0TE0/Dun/AG64+zbNnzqq7v7tdf8AED+0o9JttEtrWQJDFulb/wBBrm/Cd3DHqUKXO1Pm2uzf71eqXzaa2jtqqQ/bC0Sqys9PmI5o854Rr032e1l+TCbPmXbXnEzFpi+zG6vc/H8fhvVrVLaGwktpGXd5f3q8e8ReH5tKuN6Qt5TfNUfD8RtTlcyqVWfdspKdCqCRd+6g6TX8O2vmP8g5/iq14wmEccNmlzuRfm21P4YtkjUzO642bvu1h65fPeX7vvVlZ/vLS+2Y8vNMpk+Y1aOnzTx252P81Z8Y/eYetnSVhWNhs/4E1QEi9pd472phd97tTdSmubfds+cVFbqnmHyX+Zal1L99OIUdt+z/AIDQR8PvIr6fq1zcN5P3f4fmq/dXiW8bPs2/w7lqO3sYbWMyVHfMkkJhfk/e+WtBc3vjrfUt0iu8y4b+GtixTdDLNC7FFrnbfT3umXCfdrqtBmezt3R0UIyfMq0B8RmyX32X3VvvV96/Gtt/7AxdCBnwhpZH/kvXwpqljbM29I2279v3a+7PjXb7v2CDbK2P+KS0pQfxt6/X/DHXKc7/AOwaX/pMz7LhR3weP/69P8pHwGusJ5nlu+dv96tGHe8P2npu+5WZb6SjNs+Ulfv/AN2tGO4e2jCPtx93bX5DKMYyufG/ZJbfevM0O8f3qkkWFmR3TBk+Wq011OJN6Ju3f3f4aiWaaS4SF0YBv4qQSjyli4t/9tg23/vmq8av5e/zmI/jp/2h1uPv/dfbTG+VVTfuT+81L3ugvd5hJGfOx5lP/stZ2qKqyfc3bf4lrRkt0uN2zctMbQ55ov4f71EolnNzWbtJ8nA/vVCbGZ12bN3y/wANdP8A8I/5Kqj/APA6kbwn5S74X4b7v+zTjEz5uU5C006a4uvISNifate80+bT1jieHYy/f3Vu/D/Rba68eQ2Tur/Oqv8A3a9C/ah1rwR4i1fw94a8B+A4dGHh/S2ttW1D7b5rapcM27zP9lVX7q1nKITqX5TA8G2v/EjV/vf31/urWnazzaTcLqtm+2aP/VN/dqv4NV5ND2bMbX2tuq9cRyRtKfJ+X7u5a3p7GNSMZaH2D+xb+3NqVjJZ+D/G2vNaTQp/oGpebtbd/Cq12/8AwVO0HVfjj8O2+MupaU02o6TErPNbxf66Pb95mr4A0+6vNJukubZ2/c/Mu371fUfwN/bAfxF8M9S+Dnj+/jZ7rTWt4rq63bWX/a/2q1jWnS0+ycFXDxn7/U+R/L8ldnzff/iSvq7/AIJzNnRvFKkYIns8/wDfM1fMOs6b9h1i5tra5V0hnZFZX3Ky7q+n/wDgnTn+yvFmQB/pNn0/3Zq/RvCb/kvML6VP/Tcz7bgdy/1ho3/vf+kSPG/jkUT42+KlMTBv7duWV/X94a5qO385ld41zv3bv71dL8dlQ/GfxSWbaf7eufm9P3hrnY1/eNs+6v8Adevjs8/5HeK/6+T/APSmfO5jJf2hW/xy/NiBXW4EMnyt/dX5ql2pI3k7GLbfu79u2ntC7R74H27fu0ohLQ7P3j7fvfJ8zV4/2DkjKW8iNdm5k37fm+9UCypCVRPm+fazbNy1buFQ7odm1tm5Vaq7RC3dnfzAI/4mquZBH4rC+Z5f+kiH5lptoySKuz+9/FUUzbf3Xk//ABNSbdtwyJJt3JtrGR3x2LMNw/2dkeDf821G3/dqeOaHaPn+X+CqTFNqu7t8y7akVkaFpEdW/uVly/aOqPOaX2tI4fJ6bl/herNjL5kaTP8AN8rbt1ZUf+qTfyV+bdVyN/JZXR2X5Nv+zS5UKUpGtbSecud/3f4f71WLdtyvNMija/y7X3Vm2s27Y7/LuT5NtXbObazO5VGb5mVnreJx1uXoaFjMVVdj7n2bVjX5aZcrBsKOjMZPlpkbAyIkKYXZu3Sfw0jMis2987fl8tfu/wC9V/4Tg92XunGX1r5LtM+7bu/v1LYrvj87yVbd9z/aWrGqRp882/I2fdp1vHtVY1Tjb8jKlR7GfKe3Rlyk9rbpM2Xh/h/75rVtWeFl/fbl/u1ShjeO3/cup/2a0bVfm2eTtG2vPrUZRPawtT/wIu2Me5Vab/lp/Ey/MtaOm3HnS7PJj+X7q/d3L/8AFVm29ykbF96/991dtZEutjwpsMnzfc+XdXj4inL7J7NOtKUuVyOg02R45g+xSzP/ABfwrXRabfJHCiI+1tm7d/8AFVyVi32eOKa5Crt3KzK33mrXjvNuJpLnai/NuVP9mvJqe9I9Gm4xOxtbra2938zcyq67/wCGug0vUPs00XnQ7k3bn3VxOl655bLv/wBIWRP3rK+1l+X5Vrd0nUplji2PDjeq7ZG+7XLKPKd8akTvtJ1GG3YvN0/ur/tVpLq1hG0iJtfy4vnk3bf4ttcTp+uOZGdEVjGjNt3/ADNWjJqkMLI7p/rE3fe+Wrw/PGRjiJQkaeuXEP2hEuZtiNKyfN93/erntQ1K2hm8mN8Ov8Wz5WqXWL+Z42hfaRvVkZvm/wDHqwdUvEW382ZtzKny7vvV7uFre57x8xi6fNJyPSdHS4vvAnlWjhpZbSVYiG/iO4Dn615V4p+E3xVutFns9F0dTLcjbMXvIhuHrktVnwz8UfEPhG1XSozHdCeTdELndtiz1AwRgd8Vz/iH9srxRp2uTadpmhaVJDDN5bSSCTJx94jD8iv6Mnn/AIZ8WZNl9PNqtenVw9KNO0EraJJu/LK9+W620eup62MxvDWY4SgsbOcZU4qPur08n2OftP2YvjQlwh/sC3jVW6m/iPHpw1dHqfwG+J4tvI07w/Gw27SrXsQ4/wC+qvWX7VPjCWyS6utA0zdIcqsaScD8XqjqX7YPi+0lkih8O6XlO8iyf/F1z/UfBiMr/WsT9y/+VnlQocD30rVfw/8AkTlLz9mH44OS0XhuMgggKmpQjb+b9K5PWP2Nv2h7243x+DoWG/duOrW4/wDZ66rVv2//AIj6fN5UPg/Q5CPvLtmyP/IlYdx/wUp+J0RITwR4f47Ms/8A8cpfUfBff61ifuX/AMrGqPA3/P2r9y/+ROef9iP9pBFaRPA0DMynC/2xbfL/AOP1jX37Bf7UupzNLP4KtVI+4TrNsf8A2euwX/gpn8WiQT4E8OYPQ7Lj/wCO0y6/4KefFS3GR4F8On5f7k/3v+/lV9T8GJe99axP3L/5WEcNwN0q1fw/+ROGb9gD9qcWjQjwBaFy2Q39tWv/AMcqhP8A8E8P2ry+6P4f2h/7jlr/APHK78f8FQ/jGyGT/hAPDIA6gpcZP/kWqkv/AAVV+MiqHT4eeGcHqClxkf8AkWo+oeC//QVifuX/AMrNPYcEW/i1fu/+1OKj/wCCdv7WET7ovAVoM/8AUbtfl/8AIlbuhfsHftRwZGoeA7RQRgkazbE/pJWmf+CrnxnySvw88LlR32XP/wAdqWD/AIKpfGl0WWb4deGVRjgER3H/AMdp/UfBeOv1rE/cv/lZLocDf8/av3f/AGpR1X9gH9oS6QmHwbakj7v/ABNLcZ/8frmr/wD4JzftTOxMPge0ceg1q2H83r1jwb/wUs8f+IZxbaj4O0GFs4IQTc/nJXW6l+2t8Tre386x8MaDJu+6WSbA+v7yksD4LS0WKxP3L/5WQqPA1P3vbVfuX/yJ85r/AME6f2smTa3gG0GemdctTt/8iUi/8E5f2slBA8CWgz6a5a//AByvVPEP/BSP446KzLH8PvDL7Wxylx/8drAk/wCCrnxpiQs/w78Lgjtsuf8A47Q8v8F4/wDMVifuX/ys0jS4HltVq/d/9qcYn/BOj9q8gq/gG2A3ZGNctf8A45SJ/wAE6f2s1BUeAbTP95tctf8A45XZD/grD8Zud3w58MDH+xcf/HaVv+Cr/wAZVfb/AMK88L/98XP/AMdo+o+C9v8AesT9y/8AlZXsOCf+ftX7l/8AInIJ/wAE7v2shFg+A7UMPu41u1/+OVLD/wAE8v2r1H7zwHabv7w1u1/+OV1p/wCCrXxmwGHw98L4P+xc/wDx2g/8FW/jKOB8PPDBPpsuP/jtH9n+C/8A0FYn7l/8rEqHBEdqtX7l/wDInP2f7AH7VEGC/gW1POcf21a//HK6HT/2JP2l4bcRT+B7ZMDGI9Zt/wD4uprT/gqh8Y7ghH+HfhoMfRLj/wCO1dP/AAVD+KkcZkn8DeGxt64W45/8i01gfBf/AKCsT9y/+Vk+w4H/AOftX7l/8icxqf7Bv7UF1K0ieBrZjuyrDWbYf+1Kji/YE/acEarJ4HthtGcLrNt97/vuunt/+CoPxjuX/d/D/wANY7jZcZ/9G1dP/BTL4rKGZ/BHhtQq5O5Ljn2/1vWj6j4L2/3rE/cv/lZLocC/8/av3L/5E8w1T/gnV+1bcXHnQeArQ7upGt2o/nJVX/h3J+1r/wBE+tP/AAeWv/xyvSj/AMFRvjC0vlxfDzw37FluMf8Ao2lvf+CoHxnjtzPZfD/wyxX7yOlxn/0bS+p+C8v+YrE/cv8A5Waxo8E/8/av3f8A2p5r/wAO4/2tP+hAtP8AweWv/wAco/4dx/taf9CBaf8Ag8tf/jldr/w9j+NP/ROfC/8A3xc//HaP+Hsfxp/6Jz4X/wC+Ln/47VfUfBj/AKCsT9y/+Vl+w4K/5+1fuX/yJxcf/BOb9rQct8PrP/weWv8A8cq7pn/BOb9qKS7jXUPBNtFGWXfINatjt/APXoHhL/gpj8evF+qx6Rpvw28MvI/UrHcYH/kWvXtG/av+ItzGBqfh3RVkC/P5SSgE+gy5rKdDwUpL3sXifuX/AMrOar/qJD3ZVqv3f/ann/hf9jP4teGNJj0y08K2o2jMji/h+Zv++q11/Zg+M0Uonh8NQqw6bdQhx/6FXZN+1Z4xTIbQdK3B9pBEn/xdMm/au8dJsRfDOlbmGcEydP8Avqud4bwQlvi8T9y/+VnO6PAL3rVfuX/yJ1nw18AeONC0RtM1/SFVpBkk3EbAH8GroYvBuqrIZ2i+cH5DuXgfnXMfCv47+KPHN3NbapoVqoiAO+zjfHP+8xrsZfGOpqp2WkJbOVVsjK/3utS8B4HdcXifuX/ys5o4bw8V0q1b7l/8gcpqHw18bx3sk2nxKyOrLhJlThvqaSDwL8QbcqsmkrIsabV2XSLn9a27/wCJup2dzHGLCBkkGMhWyD+dE3xN1NWXyLO2fPVBu3fhzWNTKvA7ri8V9y/+VFPCeH0d61b7l/8AIHOyeAfiXI27+yo1bbgMLiPj/wAeqpJ8OvinNGI20CDcFI3tdx//ABVdM/xS12P5ZbSyRiMpuD4P/j1D/Fy5t4Q86WjOekcatz+OamOWeBdv97xX3L/5UDwnh7/z+rfcv/kDO+Gfws8WeHfG0HiTxAwZIg4yJlOMxlegPqa539qj4NfEb4neMdN1PwXo8dxbQab5M8pu442VvMc4w5GeCK7zwf8AEzUfEniaHRrjT4EhmD4eIMWBCFuTnA6VoeP9R+KOnTrH8PfClpqCG33NJd3CpiTJ+XBde2Ofev1nJci4FzXw1r4HLnia2D9veXLByre0Sg7KMab91Llb917vUaoeHqldVqv3L/5A+PviL+xb+0Z4hhtrHSvBkEkUcu+RpdXtwT+b0ul/sU/tFWcYR/CNsNn3R/atv/8AF17rcfED9usayLa2/Z+0A2eObhtXhz+X2rP6VqWvjL9sJ3H2r4M6Ii98alHn/wBKK+fo+HXA8YWjh8x+dCf/AMpOlU+Abfx6n4f/ACJ4Kv7Gn7QDgmTwvbKSMfLqUHyj/vurQ/Y0+NJCRt4TtgqptyNRhz/6FXuq+Lv2tyxDfB/RQAeD/aEfI/8AAipovFf7Ve0mb4S6PnPAW/j6f9/60/4h3wT/ANA+Yf8Agif/AMpE4cAPevV/D/5E+fj+xj8b443SDwpD935M6nB/8XWP4y/Yn/aP1TQJ7TS/B1u08yBdp1e3GM9eS9fTg8VftS7xn4T6Tgrk/wCnx8H0/wBfWV4x8cftoWGkmfwZ8DdEvrzeAIZ9UhVcdzk3K/zo/wCIecE2/wB3zD/wRP8A+UlRhwCmrV6n4f8AyJ8Z/wDDuP8Aa0/6EC0/8Hlr/wDHKP8Ah3H+1p/0IFp/4PLX/wCOV9P/APC0/wDgpZ/0a14X/wDB7b//ACbR/wALT/4KWf8ARrXhf/we2/8A8m0v+Ie8E/8AQPmP/gif/wApOj/jBP8An/U/D/5E+YP+Hcf7Wn/QgWn/AIPLX/45Qf8AgnH+1oeD4AtP/B5a/wDxyvp//haf/BS3/o1rwv8A+D23/wDk2j/haf8AwUs/6Na8L/8Ag9t//k2n/wAQ94J/6B8x/wDBE/8A5SH/ABgn/P8Aqfh/8idj8HvhP448JfsVr8G9d0yOLxAPDOpWZtFuUZfOlM/lrvBK8715zgZ5r4tb/gnF+1qeR8P7T/weWv8A8cr72tvHXxI8Pfs66h8Tfil4TtNK8S6VoF9f3+kwTCWGN4FldF3JI+4MqIThyfmPQ8D5A/4ex/Gn/onPhf8A74uf/jtfQcf4DgOGEy2hndStT5KKjTUVaXIlFfvE4NqWiurKzvoZYahwLeTp1qr112/+ROK/4dx/taf9E/tP/B5a/wDxyk/4dyfta/8ARPrT/wAHlr/8crtv+Hsfxp/6Jz4X/wC+Ln/47R/w9j+NP/ROvC//AHxc/wDx2vzf6j4Lv/mKxP3L/wCVnV7Dgr/n7U/r/t04r/h3H+1p/wBCBaf+Dy1/+OU3/h3D+1r1PgC0P/cdtf8A45Xb/wDD2P40/wDROfC//fFz/wDHaP8Ah7H8af8AonPhf/vi5/8AjtV9R8GP+grE/cv/AJWHsOCv+ftX7l/8icV/w7j/AGtP+hAtP/B5a/8Axyj/AIdx/taf9CBaf+Dy1/8Ajldr/wAPY/jT/wBE58L/APfFz/8AHaP+Hsfxp/6Jz4X/AO+Ln/47S+peC/8A0FYn7l/8rD2HBX/P2r9y/wDkTiv+Hcf7Wn/QgWn/AIPLX/45R/w7j/a0/wChAtP/AAeWv/xyu0b/AIKyfGkDP/CufC//AHxc/wDx2hv+CsnxpAz/AMK58L/98XP/AMdp/UfBj/oKxP3L/wCVh7Dgr/n7V+5f/InF/wDDuP8Aa0/6EC0/8Hlr/wDHKP8Ah3H+1p/0IFp/4PLX/wCOV2v/AA9j+NP/AETnwv8A98XP/wAdo/4ex/Gn/onPhf8A74uf/jtH1HwY/wCgrE/cv/lYew4K/wCftX7l/wDInE/8O4v2tN27/hAbT/weWv8A8cpf+Hcf7Wn/AEIFp/4PLX/45XpGjf8ABUn4u63GbWDwJ4ZS8P8AqY3S42yH0B83rVC4/wCCrHxvtpmt5vhv4XR0bayslz/8dpfU/Bf/AKCsT9y/+Vi9hwX/AM/av4f/ACJw8f8AwTj/AGsiw8z4f2gHf/ieWv8A8cr7Z/4JvfAy8/Zo0HV9Y+JNvb2mr6gUt47aPbMRCRl2Lx5GcgcV87+Af+Clnx48eeI7bw7p3wz8OSS3MojRYorjJY9uZa+9/D/hS3v7Czk1K6cTyWiNeCIbVjlK7iozk4rxc6oeBEKPssVjMUk+yV//AE0z18nwHC9XEe0w85trvt/6Sj0TTPi74GtExLfyE55PkPkj8q1bP41/DJZWF1qjsrY+ZrSTt9Fri9I+EmgX8ImuNRvFHcIU5/8AHa6LTP2dfCN64WXWdSXK5XDxjn/vmvjHlv0a5R1x2N+5f/KT7hUsO4rc6OL46fCKJ939uyHnAP2GXgf981ZuPj58GpQXj12QF2GV/s+XgHr/AA1n237JPgqeHzz4i1XA7Bosn/xyrUf7H3gGRjjxRqxA7AxZH/jlZrL/AKNMf+Y7G/cv/lJoqNGPulS++NvwqeV2t9dkI2lVb7DJu29v4awdU+KvgK7RWg1hg38ebST5v/Ha6GX9kTwaCUh1/VmY/c5ix+PyVzOofs9+GLOZoF8QXuVJG5gmAR2Py9a2p5b9G37OOxv3L/5SRUpUOXW5zOr+KvC95OXTUJHGSQTAw/pXH6syXzq8NxsVRt2qnOM5rrNd+HWj6ZOI7bUpnUHErMV+X9K5q+0tbZ3FuzPtkKYbg5FejQy76O9PWONxnzS/+UnlVsLlc7qTl/XyOQ1XRNbmDC3t1kOc7vMALt/eOaxNT8GeMLmdwLZGiKfuhFIibW9+ea6XVvEOoabIyJaI+DgYycn0+tcnqfxi16wLL/ZVrlBkhg33f++q97DYDwHfvQxeK+aX/wAqPm8VhuGHJqpOfy//AGTL1X4Z+PrjIs9LQEr95rpMZ9etY0/wY+J1w29tMiVmfc7LdRnH+7k1b1D9pjxJaMUTSNNBVcvv8zj/AMerPH7Vvi3d5baBpeexUSEf+hV7NLL/AAV5fdxWJ+5f/Kzx6tDgm3vVav3L/wCRF/4Ut8TyVjXRYlj/AIl+2R5/PdXqPhjw5q9h8MB4ZvoFS8+wzxGPzAwDMXxyOO4rzSD9qHxbI6o3h/TTnrt8z/4qrtv+0j4klG+TQ7HGcYUSE5/76r6fhrOPCfhnFVa2ExFZupB03zRuuVtN2tBa6Lv6HTleO4MyitOpRq1G5RcXzK+jt2itdChdfAv4iGPFpYwLuXDBrpcr+Oa808dfsl/HzxH4lS+stDsjbxwldzahGCT9M16v4g/aa8RaLa/aV8NWLARlizyuAMV45bf8FNPHl74kvNHtfhzoxhtmISVriXLY9ea+fjl/gnusViPu/wDuZxww3AnLpVqfd/8Aannmv/8ABPD9p+/unktfDmnMrNkZ1iIf1rHb/gmv+1WTn/hF9M/8HUP+Nehar/wVU+JdhI8cfwy0FinUNPMP/Zqpf8PaPigeR8K9A/8AAif/AOKq/qPgp/0FYj7n/wDKzWGG4H6Van9f9unO6J/wTr/agtYXiu/DGmKD0H9sRH+tR3H/AATo/amlfJ8N6a3zZ3DWYR/Wu60n/gqT8TNRT5/hloSv6Ceb/Gi//wCCpHxNsjtHwy0Nj6edP/8AFVH1PwT/AOgrEfc//lZDocDc2tWp93/2p52P+CbX7U3O/wAL6Yc/9RqH/GlH/BNz9qf/AKFXSh9NZh/xru1/4KqfE9ip/wCFZeH8H7x+0T8f+PVKn/BU34myjKfDPQfu5/183/xVH1HwT/6CsR9z/wDlZXseBv8An7U+7/7U4P8A4dwftR5x/wAItpeP+wzF/jUh/wCCb/7TZw58N6duH/UZi/xrtx/wVO+JaDfP8NNAVT91/tE2D+tRt/wVX+JQGV+GGhdcczzf40/7P8FP+grEfd/9zF7HgaP/AC9qfd/9qceP+CcX7TOf+Ra00D21iL/GlT/gnV+1FGqxDwzppVf+ozD/AI11b/8ABV74lBii/DHQQf8Aanm/+KpU/wCCrXxPZtrfC7QR/wBt5/8A4qmsD4Kf9BWI+5//ACsaocD9KtT7v/tTnIP+Ce37TsChV8Madgdv7Yh/xrQtv2B/2loAWHhnTQx6/wDE2i/xrXX/AIKr/Ekjc3wx0PHtPN/8VV7Tv+CoHxGu5Ak/wy0ZQ33Cs03zfrT+o+Cn/QViPuf/AMrJ+r8Df8/an3f/AGpT0/8AYZ+P0TB5/DlgrbcM39qRn+tdT4a/Ze/aH0mOS3u9As3jP3VGqR4P61d8O/t/+O9bIWTwJpCE9Assv+Ndhp37VPxC1BFmPhPSYomztlkkk28fjSWB8E+mKxH3P/5WZyw/AcdHVqfd/wDamG37KXiy/iB1HwXYCXfw63qDav8Ad4Nc1rv7B/i/V/Nh/si0CSAgH7avFel3H7V2t2G2O80HTncpuYwzOV/nViH9p7xDPp7XqeHLFSMHa0j9D361p9R8F9vrWI+7/wC5h7LgP/n9U+7/AO1Pk/Xv+CaX7SsWpyroeh6bNb7v3UjatEpx7gmoLT/gm5+1OkgE/hbTNobOf7ah/wAa+hPGn7cHxE0ATnR/AmkzCEZ3TSy4I/A159B/wVG+KjTGGb4V6GpHpPN/8VUPL/BTrisR9z/+VmkafAvL/Gqfd/8AanNr/wAE/P2l7fT3hh8NaY0hTaudWi/xrnp/+Cbn7VLS+ZH4V0zHp/bUP+NelXf/AAVI+IUFwbdPhvoeV++Wnm4/WoJP+CpfxQCmSL4Y6CVHVjPN/wDFUfUfBT/oKxH3P/5WP2PAv/P2p93/ANqeeL/wTY/ao3iQ+GNMyGz/AMhqH/GtCL/gnX+0+iHd4X03J7LrMX+NdY//AAVV+KkbfP8AC7QMeouJ/wD4qr0P/BUP4lSQea3wz0IfS5m/xpPA+CnXFYj7n/8AKwdHgbrVqfd/9qcAf+CdX7U4kJHhjTto+7/xOof8asRf8E8v2pduZfDWmA/9hiL/ABrtl/4KifEpsEfDLRBnsZ5v8aQ/8FQ/iiEDn4YaFjGT+/m4/Wn9R8FI/wDMViPuf/ysPY8DSf8AFqfd/wDanJQf8E9/2mo1O/w3p59F/teH/Gqk3/BPD9qWWUlfDGmKD1xrMP8AjXbD/gqP8Tdm9vhjoQ9B9om5/WlP/BUn4mbcj4XaHk/d/wBIm+b9aj6j4J/9BWI+5/8AysPq/A0f+XtT7v8A7U5PTv8Agnv+03asHfw1p2QMc6vEf61r2/7Bf7Q4t2iuPDlhknII1WL/ABrYtf8AgqD8T7iLzT8MNDX2M83+NWB/wU88fjHm/DjRhn0mm/xo+o+Cf/QViPuf/wArF9X4G/5+1Pu/+1Obuf2CP2jnO+PQLHOM4GrRfe/OvqL4nfDLxh4k/ZSb4WaVp6Ta1/YFja/Z/tCqpliMO8b2IXA2NznnFfP3/Dz/AOIJGV+HOife/wCe83T161E//BTn4rTz7bX4daBGgHJladifycV9FkuceEvDuGxVLC4ms1iIOnK8W3Zpr3fcVnq97+h6OAxnB+W0qsKVWbVSPK7ro77e6tdTlk/YP/acjYlfBVr0x/yF7b/4ukf9g/8Aab2/L4EtCf8AsMW3/wAXXYJ/wUr+LAjDT+AvDwJ9Fn6f9/Ken/BSj4rlA58A6Bg8nCz8D1/1lfOfUfBn/oKxP3L/AOVnlfVuB/8An7V/D/5E4qP9gv8AadVh/wAUVajHrrFt/wDF0+T9gv8AaXaZXHgq2wv/AFGLb/4uu1/4eS/FLdtHgjw8SBlsJPx/5Epo/wCClHxRMXmHwR4eHttn/wDjlT9R8F/+grE/cv8A5WDo8DL/AJe1fuX/AMicdH+wX+0kUKz+B7Y4+7/xOLb/AOLpI/2Cv2lUO4eDbUD+6dXt/wD4uuxH/BSb4stEZh4D8PADswnyf/IlKv8AwUi+Lhj81vA/hwBl3KAlx/8AHKSwPgt0xWJ+5f8Aysf1fgjl/i1fuX/yJyqfsJftGiPL+CLVn/7C1v8A/F0L+w3+0qpYnwJbEEYx/bFt/wDF11K/8FJviyzbT4F8PAj7wKT/APxyh/8AgpL8WowrnwL4eKlsfLHcf/Haby/wY+J4rE/cv/lYex4Ij/y9q/cv/kTlh+w5+0vIY9/gG0XH3ydYtj/7PWh/wxF+0N9mMf8Awhlru9f7Vt//AIutpP8AgpN8VS7B/A/h0DOFG2fJ/wDIlXV/4KJfFA2T3h8G+HhsjLY2z9v+2lNYPwYlLTFYn7l/8rJlh+ButWr9y/8AkTh/A37CH7R2k+I7jVNW8GW0SnPkumr25z+T1qax+w78fLstLF4Rt5ZC+4FtUgH/ALPXQeA/+Ci3xV8V209ze+CPD0YjbagiE/Pp1kNa2oft8/Eq1hD2/gvQ3IOHY+dgf+P1DwPgv/0FYn7l/wDKwlhuBuZXq1fuX/yJyvh/9jP9oCxsXt7rwhboWkzj+1IDn8nqxP8AsdfHtovLj8J25P8AeOpwf/F10+nft5fEW8gSWXwnoa7unyzcj/v5Sz/t3/EqJiB4O0TAGcFZs/8AoyrjgfBi3+9Yn7l/8rM5YfgWUuZ1qv3L/wCROPk/Yx+Pi/6vwhA3GOdUg/8Ai6gP7GP7RSsWi8IW6jbjaNXg/wDi660ft+fE8u0f/CH6BlRlhib/AOOVH/w8D+J+WU+DNBBHTib/AOOVp9S8GtvrOJ+5f/KzH6rwDzfxqv3L/wCROUH7Ff7QxVI38HW+M5b/AImtv/8AF17z+x18G/Hvwg07XrTxzpUdqb2a3a18u4jk3BRIGzsJx94da8zX/goF8TGQk+DNCDDsVm/+OVDe/t/fE+6spbW38LaPBLLEypLHFKWjJGNwzJjI6816+QZl4TcNZpDMcJiK8qkOaylG6d4uL2guj01Wp6WW4ngrJsXHE0atRyjeya01TX8q79zg/jjIg+NvipHG7/ieXPHp+8Nc9b/vG6qn99tn3qq3WqX+qajNqmoX73F1dStJLPMS0kjk5LMTySTzmpbeTy1/fPvVf4tlfjGOxMcbj6uItZTlKSXa7b/U/PcVWWIxM5r7Tb+93Lp+zLgumz5Pvb6W6VPLEyf3P4XqD7QjNveFWRvl3MlRXVw7Rs6Pg/7P3dtcXvfaM/djSJbi73SfIkY/hRv4ttQXEaQ4HzbG/vNSec7M8Lop+T5G/vVHJNMsafI2F/hZaUpS+FBTp83vC/aEnymxTt+Z1amfaEjZv3O7+61OuJIYo1R0Xc3zVXa42/PMm5vvIq/xVjLY76dvtEse+SQzJ8n/AEzZvvVOvkNDs/h/2ap/aIZF3v8AeqZZkbaiD51/8dqDcvQt9nXeNqr/ABrvq5bzSRyb3TerfLtas6FvtDbLqFfm/iq/FJsk+zTbWVvuVO0+YUv7pdguizG2+zK4Xa27f/FWhbSJHMCiMrN/Cq/NurNh7b/lbd93ZVyO481vvsn8Tt1rWMebc4K0pRloaq3CeSqeTlf4l/ipitP+72TbG/g+Xa23/aqKznk3Nvfeuzcn+zTmuIfOSaZNzr8r7XrXl5fhOTm94//Z\n",
- "text/plain": [
- "
\n",
"\n",
- "This notebook was written by Ultralytics LLC, and is freely available for redistribution under the [GPL-3.0 license](https://choosealicense.com/licenses/gpl-3.0/). \n",
- "For more information please visit https://github.com/ultralytics/yolov5 and https://www.ultralytics.com."
+ "This is the **official YOLOv5 🚀 notebook** by **Ultralytics**, and is freely available for redistribution under the [GPL-3.0 license](https://choosealicense.com/licenses/gpl-3.0/). \n",
+ "For more information please visit https://github.com/ultralytics/yolov5 and https://ultralytics.com. Thank you!"
]
},
{
@@ -547,10 +399,10 @@
"cell_type": "code",
"metadata": {
"id": "wbvMlHd_QwMG",
- "outputId": "7e5e09a2-892e-4999-9e6c-567ea329eb38",
"colab": {
"base_uri": "https://localhost:8080/"
- }
+ },
+ "outputId": "4d67116a-43e9-4d84-d19e-1edd83f23a04"
},
"source": [
"!git clone https://github.com/ultralytics/yolov5 # clone repo\n",
@@ -559,17 +411,16 @@
"\n",
"import torch\n",
"from IPython.display import Image, clear_output # to display images\n",
- "from utils.google_utils import gdrive_download # to download models/datasets\n",
"\n",
"clear_output()\n",
- "print('Setup complete. Using torch %s %s' % (torch.__version__, torch.cuda.get_device_properties(0) if torch.cuda.is_available() else 'CPU'))"
+ "print(f\"Setup complete. Using torch {torch.__version__} ({torch.cuda.get_device_properties(0).name if torch.cuda.is_available() else 'CPU'})\")"
],
- "execution_count": 1,
+ "execution_count": null,
"outputs": [
{
"output_type": "stream",
"text": [
- "Setup complete. Using torch 1.7.0+cu101 _CudaDeviceProperties(name='Tesla V100-SXM2-16GB', major=7, minor=0, total_memory=16130MB, multi_processor_count=80)\n"
+ "Setup complete. Using torch 1.9.0+cu102 (Tesla V100-SXM2-16GB)\n"
],
"name": "stdout"
}
@@ -583,66 +434,59 @@
"source": [
"# 1. Inference\n",
"\n",
- "`detect.py` runs inference on a variety of sources, downloading models automatically from the [latest YOLOv5 release](https://github.com/ultralytics/yolov5/releases)."
+ "`detect.py` runs YOLOv5 inference on a variety of sources, downloading models automatically from the [latest YOLOv5 release](https://github.com/ultralytics/yolov5/releases), and saving results to `runs/detect`. Example inference sources are:\n",
+ "\n",
+ "```shell\n",
+ "python detect.py --source 0 # webcam\n",
+ " file.jpg # image \n",
+ " file.mp4 # video\n",
+ " path/ # directory\n",
+ " path/*.jpg # glob\n",
+ " 'https://youtu.be/NUsoVlDFqZg' # YouTube\n",
+ " 'rtsp://example.com/media.mp4' # RTSP, RTMP, HTTP stream\n",
+ "```"
]
},
{
"cell_type": "code",
"metadata": {
"id": "zR9ZbuQCH7FX",
- "outputId": "c9a308f7-2216-4805-8003-eca8dd0dc30d",
"colab": {
- "base_uri": "https://localhost:8080/",
- "height": 534
- }
+ "base_uri": "https://localhost:8080/"
+ },
+ "outputId": "8b728908-81ab-4861-edb0-4d0c46c439fb"
},
"source": [
- "!python detect.py --weights yolov5s.pt --img 640 --conf 0.25 --source inference/images/\n",
- "Image(filename='inference/output/zidane.jpg', width=600)"
+ "!python detect.py --weights yolov5s.pt --img 640 --conf 0.25 --source data/images/\n",
+ "Image(filename='runs/detect/exp/zidane.jpg', width=600)"
],
- "execution_count": 38,
+ "execution_count": null,
"outputs": [
{
"output_type": "stream",
"text": [
- "Namespace(agnostic_nms=False, augment=False, classes=None, conf_thres=0.25, device='', img_size=640, iou_thres=0.45, save_conf=False, save_dir='inference/output', save_txt=False, source='inference/images/', update=False, view_img=False, weights=['yolov5s.pt'])\n",
- "Using CUDA device0 _CudaDeviceProperties(name='Tesla V100-SXM2-16GB', total_memory=16130MB)\n",
+ "\u001b[34m\u001b[1mdetect: \u001b[0mweights=['yolov5s.pt'], source=data/images/, imgsz=640, conf_thres=0.25, iou_thres=0.45, max_det=1000, device=, view_img=False, save_txt=False, save_conf=False, save_crop=False, nosave=False, classes=None, agnostic_nms=False, augment=False, visualize=False, update=False, project=runs/detect, name=exp, exist_ok=False, line_thickness=3, hide_labels=False, hide_conf=False, half=False\n",
+ "YOLOv5 🚀 v5.0-367-g01cdb76 torch 1.9.0+cu102 CUDA:0 (Tesla V100-SXM2-16GB, 16160.5MB)\n",
"\n",
"Fusing layers... \n",
- "Model Summary: 140 layers, 7.45958e+06 parameters, 0 gradients\n",
- "image 1/2 /content/yolov5/inference/images/bus.jpg: 640x480 4 persons, 1 buss, 1 skateboards, Done. (0.012s)\n",
- "image 2/2 /content/yolov5/inference/images/zidane.jpg: 384x640 2 persons, 2 ties, Done. (0.012s)\n",
- "Results saved to inference/output\n",
- "Done. (0.113s)\n"
+ "Model Summary: 224 layers, 7266973 parameters, 0 gradients\n",
+ "image 1/2 /content/yolov5/data/images/bus.jpg: 640x480 4 persons, 1 bus, 1 fire hydrant, Done. (0.007s)\n",
+ "image 2/2 /content/yolov5/data/images/zidane.jpg: 384x640 2 persons, 2 ties, Done. (0.007s)\n",
+ "Results saved to \u001b[1mruns/detect/exp\u001b[0m\n",
+ "Done. (0.091s)\n"
],
"name": "stdout"
- },
- {
- "output_type": "execute_result",
- "data": {
- "image/jpeg": "/9j/4AAQSkZJRgABAQAAAQABAAD/2wBDAAIBAQEBAQIBAQECAgICAgQDAgICAgUEBAMEBgUGBgYFBgYGBwkIBgcJBwYGCAsICQoKCgoKBggLDAsKDAkKCgr/2wBDAQICAgICAgUDAwUKBwYHCgoKCgoKCgoKCgoKCgoKCgoKCgoKCgoKCgoKCgoKCgoKCgoKCgoKCgoKCgoKCgoKCgr/wAARCALQBQADASIAAhEBAxEB/8QAHwAAAQUBAQEBAQEAAAAAAAAAAAECAwQFBgcICQoL/8QAtRAAAgEDAwIEAwUFBAQAAAF9AQIDAAQRBRIhMUEGE1FhByJxFDKBkaEII0KxwRVS0fAkM2JyggkKFhcYGRolJicoKSo0NTY3ODk6Q0RFRkdISUpTVFVWV1hZWmNkZWZnaGlqc3R1dnd4eXqDhIWGh4iJipKTlJWWl5iZmqKjpKWmp6ipqrKztLW2t7i5usLDxMXGx8jJytLT1NXW19jZ2uHi4+Tl5ufo6erx8vP09fb3+Pn6/8QAHwEAAwEBAQEBAQEBAQAAAAAAAAECAwQFBgcICQoL/8QAtREAAgECBAQDBAcFBAQAAQJ3AAECAxEEBSExBhJBUQdhcRMiMoEIFEKRobHBCSMzUvAVYnLRChYkNOEl8RcYGRomJygpKjU2Nzg5OkNERUZHSElKU1RVVldYWVpjZGVmZ2hpanN0dXZ3eHl6goOEhYaHiImKkpOUlZaXmJmaoqOkpaanqKmqsrO0tba3uLm6wsPExcbHyMnK0tPU1dbX2Nna4uPk5ebn6Onq8vP09fb3+Pn6/9oADAMBAAIRAxEAPwD8347F5pkSP5t38P3ttaFjZzR2rzOMjfs+/wDNVi10+5kh877Gqv8AwfP96tOz0+2b99sw0e1drfxV87HY+wjHm94z4bOZ2WZ4dgV9vzN81Tx6a8jHvu+bd/DV+HT51uHd0Up95Pl21bhtfIkH2ncqfN8q/e21NS0dUbU4/ZMf7Oi52OzMu1UVU+an/wBjlW3w7l2t8y/3q3pNPRl2I+1tn/AqZZ280cXk3Nrub+7v+6tefKtLl5onZGm48qMqbQ3k/wBJeb5lb5PMf5l/2aZcaW6tshhyzffZn3ba3biHzI5USFfmX7tQyWc3zTXltuWPb+8jT+LbXJWxVWO534XDxkchrmm/KZt+d3yvurBm0maHLvu2su1G/vV3OsWsMe5xyWTd5bVh3VikkLJ5Pyqu7b/easaNacX7x6nsYyicrJYws3nom1m/vf3qWC3uYW32zr8v95v/AEGtK6s5I9iJuDMu51aq62827502Nt3Jur6zAylKUTlqREj+0wsiI7OzNuRW/wBr+7ViSPy4/wBzud9+1vm+Wq0aurIJtxdf4qtLayeX8nyusu5mb+KvqMPSlKJ58qnvco65uHaNpvlTdt2fJ8y0kjSbER3Vtq7tzJtqbyPtDLDNtx96nTKjR/Ii7t38X3a9D2fKebUkoy5SHyXjnP75l/i/3amSSVm+0v5joqbfv/Ky/wB6i3/fRrv+9911j+6rUsMMuxvJufu/fXZXPKXLE4OaUuaxPBv3b9n+r/hjl3LVqH9zJ/qV2t823/eqtbwpHGkP+qVn+dY/l/4FVuzZLqRI5plV13b12fdX+GvLxHvF04825p2cm1Ucopdvl+V9taVvDcSSK6fd+ZXrN0+GGS637F+V1aXd/d/hq7b75mX51Db9zMr/AC/7Py14WIqSNadHuaVjNLJCsP2pmTfuddvzNU8jO3yQ7X2/e/iaq8IeGNPLRW+bbu2fdq95n2OZXhhV2b5V3V4dap7+h6VOnHqWob792yI6o6orfLVCZJpPnudrBf4v97+KpmuIWmDzTKsrfdXft+7VCS5dpmR5o3/vq392uJSjztQOlx928hzbIZXSFFLs7fMqf6yopmubzY63jIVb7qrU32OGSP8AhRPveXHSyKluy/J975VXf/FWkqnNqLk5fdEntdy/3vl2eZs/76pU3yQyJsYeX8if3lqwsE0iy2zzfuvl/d/7VVr6O6WTf8yfe/d7/u1n71TRSMK0R8d1cxwrvRQv3dzfdWoprp75hNc3cjtHtSLzG+61OaGaS3RJnV1+88bVVkkRlKWtthlf+GspRhKRjH3Y8rKuoXtvHteN8qy7X/vVga9cXisrpcthkVfm/u1pXk00zAu+R/d/utWDq14+5n342/6rav3a78PFRj8JyVqhj6lM/wC8+8f/AB3dXManN82/fjd/CtdBqW+4bM0/Gzc1Yd48Pls/Vm+Xb/FXsUYy5NDxsVLmiYF9avt+07F21QVXmuNmzb/utW9cWbyR56hVqnHp7rMJvJ8xK9CnKMeU82T5hljlWZE3fN9//ZrodI3x7ntn+Rk2srfM1V9N03bGOdu7/wAdrVhs4I5BGiMk0f8ADJ8tEqhrToz+I1NLtUinR9+fLf5F/wDsa7bQZnjwibU2/N+7X5VrjdH/AHKxBE3f367TRZE+x7E2/wB1dv3mqo1PfOj2fuWOu0W4k+ziF5sOzfxfw11ui6uNyu6Mrqu1/Mfb8v8As1wWk3KOuy28xVVvnb+7W/puqQxsU3/eiVmj+9XZGpzmMoyj8R3Wn6kQN8Myh1f/AEfb93/eatXT9am8ve+1vvbmrgrHWd0iXOcFfl3L/F/wGtCHxB5K+d8wSR9qKq/M3/Aa6OYw9+J2q69C3zpZttX5Ub+9/vUybV4IYd+//WbtzL/CtcqutbYf3fmHc+1/mqvcawk3ybJCu/b9/wC9U/DAfunT/wBtusCv0/2d/wDDWbqGuosbO8jEt91tvystYN9q226ldH2xtt8qNX3f8B3VVvtUm2l3TLsnzLu/i/hqJRjI25vslPxRNDdZm85iv3fLb+GuMvJ3dXR/uK23/erW1PVHuomQXLFpJfkZvur/ALNZGqQ/aFb5G+V/3sa1x1I8x0UeaOjOa1SG2ml85Pv/AMO5vlWqtvbupYOmPLf5d3yturcbTkjdt6Mxb/lm38NQXWnpJcM8iSO38Un8K1nKn7p2RqQ5tTPWFJpD5czIn97726mTWVzIHfez+Z/yz/vVZa1eSTZDCqqqNu+fbSLYwzRuXhxufd9/71cNSnI0lUM2SN1CwpMuyT5tv/stJbxurI/nL+8ba0cn92tXybaOSHyYfuxbtrN8v3qq3Eltu+0+T86tt+VK5q1P3tCoVOXWRbtWdcoltv2tu2t8u6uj01na3TZuAVt27+61YNu7s0jzbWlb5U/hrQ0+aGObzo3bzl+X7/y7q+Ox1GXNKTPewtT4ZI7LT2T/AFM03mt8q7v4a0WuvLUI+6H5v9Wvzbv+BVzVnfTeSH/55q25d/3m/wBmp/7UdpI+Nqt8rbWr5DEYeUqp9DRrfDzG5cXySsN9zuVot6qybvu1m3mpRrD5iO0KSRbvlf5aqSal8zbNuPm2/J8q1Uk1QSM73KKrrF8nlr8u6tKOHUZe8dvtOhPeahD5yc7v3X975t1Zs0zrsfo2/wCZW/h/4FS3F4jKkEyMXX5X3fdaqzLBNJscrsZNqqv8NexhcPGPuozqVOWHKJe+c0hf7Tv3fL8tVri3DSPD9pUyr/F91d1aEljH/wAvMylG+4yp91aktdPeRc+Tv+f5fk3V9XluH5dTwcdiIx+0YLK6tvfcKry6bN5ezZ+7b/lpG+35q7BfDiNa+XNC37xtq7m27qdY+DXuN0m/hX/1f8NfY4ej7lz5XGYjm+E5C10e/Ece+2+fdtXb81XF8P7bqPztwkVGV9vyrt/2a7ux8KzRyJCkLM6/Nt3/ACtU7eDXkmj811Ty2+f91ub5q1lTjGZwRrcp5wuihpJIPmZGf/v2tQDwrMzHyXbZ93aqV6ovg/y5FT7zL99VT7y0kngvM3nfZmQbWZFWuKpR5vdN6dbl+0eUyeG7mO4Dp0Zf/Hqfp+jzQtLNczZK/wAP92vS28HmaOL/AEXa21n/AOA1m3HhWaxmm32fySIv+1uX/drxsVR+yejh63N7xysmnwxqrwp5rtztV/4f/iqJLRLVVT7HIo2bd27+Kuqj8Nos29BiKRdySN/d/u1UvrN/MhhmtmH/AE0rzJRl9hnbGpLm1Obmt5LfPkoxdvmdqpGzTzks33MrRbvL37WrevtPmkuNk3zLI27958tZd1bJZ3mz94Xk/vN8taxl9kr4vhM9YUt2SFJtq/8AXX5vlqb7PNdTPNM6r5iLsVf4f9qnzW8KM72yKpX+KrDWf7vYJtoXb95vmrS8fi5iPe5iCGSZrdYfObYvy7v7zLUNxcFVaNHaM/Mu3/ZqzInkxhGm+79xf7tZN1I7L9/HzfPu/irejTlUkYyqcseWRDM0Plu8kzfc+6v8VZ0cszN87qPm+fy/m2rVm6Z7iTyfl2xpt8yNdu6qk0nlqXh2hG+4y161GmeZWqSjL3SNpEZfJjhXb/D/ALVIq/ut83zf3fmpkbIrDftC7P4fvbqVVTCPHBtH8MbN/FXV7P7RjGt7xGq3O48Z2/N8vy7qfIszRq6Pj+9u+9VhbXbJs3/MqfP8u75qVbVMt5j/ADfe2rTfvfEbxqe5ykSXj/Y3DzSBv4Kt2zIsa70y+/dtb/0KmW8aW6tcvM21fl3bPutWlHYO1vvmhYf3JF/irel8ISrT5CssYM/7l2Rm/vfLUNxpsysNm4fLtfd92tVdI+UvezbXZP71X9I8Ga14hMh0DQri+EWzzRFEWC5zjOOnQ/lXrYalXxNRU6MXKT2STbfyWpxuTnLlgm32RyMmkvtY72Z93y/N92si+sXkupk2MNvy7a9Pl+E3jiRk2+BtTz3JtWx/Ks7Ufg98Q1K/ZvBGqvlfmxYt/hXrxyPOv+gap/4BL/I5qmDxcv8Al1L/AMBf+R5Lqmkutrvdm3r8yMtc1qmmlv8Ab+8te0X3wT+JchMa/D/WCGXLEWLnn8qwr74BfFhi0dv8NNZ2Hp/oD/4U45HnX2sNU/8AAJf5HDUy/Hy/5dS/8Bf+R4Vqlrc28jI6fKv8VUvJmkH8TbvmdVr2DV/2cPjTJBttvhTrROMcabIf6Vz837Mvx5H7v/hUXiHH95NKl/wq5ZJnXLf6tU/8Al/kY/2fj/h9lL/wF/5HARw+Wd+9v92rlrbTSXGx5mZW/vV2sP7NXx13Av8ACDxGfc6VL/hWlZ/s7fG5U82X4P66GxjH9kyf4Vw1clzxx/3Wp/4BL/I6Y5djv+fUv/AX/kcfb2fksr/+Oq1adrbvMqo/ys33Pm212Np+z38ZwUf/AIVbrqKFyR/ZsgOfyrRh+AXxcjRm/wCFZa3uP3f+JZJ/hXHLJM7/AOgSr/4Ll/kdtPLsY96cvuf+Rx0cMkbbEfdWhaxO3753Zd38O77tdVbfAr4tyuwufhrrgCr8pOnyfN+lWbX4G/FpVDn4b6wGAYLmwfgflXPLI8++zhKv/guf+R108uxcf+XcvuZy6wvtabDf7W6jzN0iPvZR8uzzK7OP4KfFRkIj+HWsq+xuXsXxu/KlPwQ+KrBVk+H2rnav/QPf/CsP7Cz3m1wtX/wXP/I744HFdIP7mcpCtzNIRDtbb/DJUMizKuwQ7dqfe/iVq69vgt8Vf4PhtrQ29D9jf/CiL4HfGK/lW1sfhVr8zf8APOLTJGZvwAzWryXPErvCVf8AwXL/ACNYYLEOWsH9zOJmjhb5PmLL8yM33t396mzSTRsr7Fd1Tb9+utv/AIEfF21Lx/8ACsfECSl8SRPpsgKH6EVUk+CfxeWUlPhfr2W6gabJgfpTjkmfSj/ulX/wXL/Ip4LF/wAj+5nNtM7EI0+xV/hWp7eZGwn3X/i+atmT4J/GHIZPhdrudvP/ABKpOP0q5pv7Pnx9vibuy+C/iaZVfaJY9GmcH8Qtb/2FnahzSwtRf9uS/wAh+wxKlrB/czJh1CazmKO6uzJj+98taVvqD+WHd2LfeWnx/Bf4zwztK/w21zcG2lTpsn+FaWn/AAC+Pl7CZbL4O+Jp4ifkeHSJmVT6ZC1vHJc6pLmlhqi/7cl/kc88PjFK/I/uZlyakkP+pdVZm3M1QNqzzK3nPk7/AJljeuhP7Pn7RbhQ3wT8VAAYLDQJ92P7v3awPEnw1+JnhWyl1rxB4F1a0toCBPNdafIiQ5O0biRgckDnuacsmzOMHUlh5pLVvklZLu9NDlqU8Sot8jsvJmbqGoJMrbPlXb/E9ULjWCtsE6j+9WfNep5g42/8DqrdaomXTf8ALs+balcUY8u55NbFS6FqTUHaNXCMwas261J2kOeBs3Lu/iaq8l58pmhfb8vytWXdawFjb58t/dpyOeNbl0Ld1fTbt4mVFZfn2vWfNdJI3zuwH8DVTuNSuJOqLt/u1Va82/Oh/wC+a56nNE9CjiveNCS+eF98aMwX+Kh77cyzvN96s0zP5nzzcf3aljuEab9z/DXFWifS4XEc3KlI0HuPNGxH+ZvvbqktZ3jbY75C/das/wA5JJGdPvMnyK1WrW3uZJkT+7/FXHUjyxPfw+I5S/G7yHZM2/8A3v4ateSjR/I+NtUoflben975quRqixsyOzM38P8AdrllHlPeo4jmHqvk7dif7+7+KpJJJvOTf/wHdUTRuI9kz7t33amVXjiCTP8Adb5t1YSid8a0dgX5meB+iv8A+PVK8z+SJnfLt/d/hqDa8fKHhmoZtqt3bdtSlLmNvrRbVtuAk3y/+zVGJk/jT5o3qFpJ2jZPOyy/NtX71NaRFz8ir/Czf3qcaPMH1rm0JJ7h1Vnd1dW/8dqDzHkHmK/8X3aTa7s0Py//ABVV2byZN6JtK/K3z1v7PliclXGcurLM0yLh0h3fwtTFk2q2x2D/AN3fVJrpFY+Vu/21qP7chXncm7+Jq3jGR52IxkbFybUJvlfyVVm+Zqq3E3mKd83FRtMm5tnzL/BVRr5/M2bFUN99a6qcZHz+KxXNAtrP50bIHYK38NNjkDN5EzqrfNVKOYwJvR12K1SrdPcNvR/mX/x6uuMT5vFVoyNG3kdWV3mxWhbuiqr+d8v8f+1WPp58xnR/7+379atlHDIuNmVX+Grj73xHkyrGnZyO395Vbb8y1raer3Ejb33fwvub7y1nabDH5m+GHhtvzSVtaXZ/xzRrhfu7aInmyqcxr2VnNJE3zqEk/hX71dPpdrtjjf8AeSstZeh2L/I6Ip2rt+b+Guk8O2aW67LmFdsa/N8/3aoxlI39Ls0VU3pjcm5F/u1r2Vo8i7HhyzNu3R0zQ7OTy40httu5Ny/7VdJY2KMuyHdvVW37kro+I5/aGJNYpNC28tjavy/3WqZ7GFo1h37fl3OrfwtWtHo8022GaHbu/i/hqKbT3WRnfcn8Hyv822ly/aOmjL3zFis5mkFz8zlvl3b/ALu2npY/6QZpptgk27/722r62aQt5Nt5n7z+GT7y1FdWO2FfLfJVPustTKMeXmPewsvdM/ULO2kZZkRnX7RtRm/h/wBqub1rT5lkbZN/F95WrsLiOH+NJNv8DL/ermNUi+y5fYvzM3yq275qcYwl7x72Gj8Kkee69YvNC80L+cjN8jN/6DXE+JNPfcyb2O75fl+9XqHiCHcrfIy/P+6b+7XGa5Z+dG6JG3y/MjVyVpfzHqxwvN7x7Vp8NtCrvMm8eb95fvK1S28T3DOnkx+Urs0TL8rK1VoLiBWY2bqUjb7zL95v/iant77/AEjyfszPtVd1eNGPLA+e9pyl+xtXjb/SUV/l3J/FWjC0MinyX/g2orL8y/8AAqz47jyW2PJ+6Z9yxqn3f+BVehbtcvhFXcjf7VefXk/5TupVOaVxLqOFZCj7WPlKrrG3zfN/FUUdq8ciu7sGWp7iRPtDpIil9m/5U+WRqY1siq58lX/j+VvlWuKpUlHc9CnHm+EbarDM02+GRt0u3yW/9Coe12uIXufKRv8AWqzfdpI4937503IqMzqvy7amihgkjO+GR3++vy/7NefUqcsz0KMfc5jCks0vJpvJdflfbFI33qzri3kmuDc7MlV27vl+9XRX0MyqblJoV2yr8uysya3hjV08lfmqqPN7U6OaJzV4rwyM7quP4G2fdrI8lLiTY80m2H7nz11WpWv7vem77vzKy/w1g3Gmp8r+WqfL8n95q+wy3mjLUxqcv2Situk+5/O3eW7I/wDDuqzDG9nCH2Nt3/eVd1RTK80ZTf8AOu1fl/vf7VSRqkfkwIm3/vpt1fXUZHj4qpGMWSWs3mN8+5f7rMv3qjnZ7qF0R9u5/vfdqxIr7o3G7+9taq7MIV2O67t/zr/drq9ofPVK0ucVLV9q/Plv4F31JDM+0v8Aw/7NRF3jwmzCsnybf4lqONpp5vOebbt+VFrKpIiMpfCX4WeSYul4r7futs2/8Bq3DJBDD/pPVt2+P+9trJhWFv7zsr/N81akLTfIny7vvff27Vrx8ZKPN8R3UYy+I2bVdrJMib0k2t+7+993+KtK3t7OaN3dPNO35WX5axIWS0Z32bty7VMdbdveLbwo+xUVU2bV+avnsRU97mPQo0/5i7C0k0bbyzOsX71tm1f+A06G427vszthk27W/h/3qqtdOq+Sj7n/AIY2/u1Fcag4Z3uYVXcy/wCr+VVrwMRKSPSp04/aLn9o7v8ARn8vav3W/wBmkVbO4ZbmaFn8v5f3afNtqGCRFklSWaGT+L94v3V/u0QyPFIIYQ3lbvm/hb/7Ksaf7szqe8XbO3S6jTY7LF/C33WqePyZFlR9u2Nv4vmakt1Tj7SY0H30WSpJI5lhX/RsnbuZmbdt+b7tVUqX6GUVL3SMxzRgwpNCu7+Lf91ajaO5kka5m+ZG/h3bq0Lf7THhJoY0Xb8iqv3qrzWsyyMkNzlm+6rbV21NPTZ3JqfCZ8kaXExhTdlot27+Ff8AZqtdNNbr86bZWTbtVa1VhdlD7GQs/wA0e373+1RNZ2aoIdjbm+VP71KVTlkc0uaMTl9SsUhUyJudv4lVqwtStwtqLaZMvJ/Ev3mrsNSs4biLMN4xLfK67P7tYOrWvkSM83ysqqvmKv3lr0sPzT5W/hPJrOcuY4y+hSNPJ2N8vy/M1ZkNjDcZ+RQ6ttX/AGq6TUIYZjJC+1d3z+X/AA1RmtYZ5lSHaiq/zrXrwlJwkeVUjIxfsDzXBdNyfw+W1Ot9Lkz8+7Zt3L/s10Xl+XJvS23Bmp0dijRt5Myp/syJ92m6zjG3QSpxjLmMWHS0jh8xId7bvl3fLSzRpDN5MwyZE+b5/mrX1C12ybPm3fKy+X/EtUry28mbfMn3k+RqqMve8jqjTHafcQ+YkGxfN+78r/dWug024aGP+HG7duX+7WDZ27+WzvDGzfeRlatjT7yT7Os0yZbf95aIy5pe6a8v8x02l30y7k+9uTcjN97bWrHdJJbo++Quqbkkjfburm7KHyLj7TCjfc+dletVZoGt/wB9BuDbvvPt/h/hrup1P5jjqQ7mxY648MiokeEbarMy/wAX+zVxfEEMLLD9p37X+b5q5r7YmYrbfNvWL7rfd/3qinmdpC7uw2/N8tdkahxy906tfFCSSMU3Ax/Lu2/L81Jb60l18m9WZXb95G3y1zEeqIsaiZNrSfM0b/w1Nb6lDHGpKfxfe3fLtrfm9wiMoROjbVE2hH6L/D/eqjPs8wpDDlJn+dd27bWba3UM3yb2O77kf8NWYw8itJbblVv7rVFT4SebmmMmuJpFP2lNnktsT/aX+GpobXgyeSuf4Y1+7V2GzeaFXeRWZk+81W/sq/IXTY3yov8Avf3qw9nzG0cROJi3WlvG/mPbK38KbqzLjR7lYWdIcPu+9Ia7aTTRdXAmS2/h+ST+H5arSaDM0x+0ozJv3bVeqjHl90qOI984yTR0W3kdEwF+aX5f4qp/Ybn5BM8e5vm/d11V5ptyvm20MPKtufd8u5f7tVLjR/s9ud8K79nyeWtYSpm8cRyyOauIYY7eL5P49yMtU7izT5XdGbc27/eroZrCGNW2Q8r827+7WbqEaRzNGkzJ5nzbtn3q4qlMuNYoQ3jrI33vvbfm/hq5Y7DJ+5dQq/wyPWe0c0cjI6L83yqrNUtvZ+WpTYxlb7jfeWvnswwvc9nD4rl1N+yunWVd6KWV93/AamlvIY5f33HmT/Kv+zVPSYUXKu7Nt+X5nrRhsZmk/dpwu1kaT71fF1MH+91Po8PiuaF5CNbosnzv5Qbds+eq8027dvtsnZtTd/6E1ai2rzfuRZ7/AC03/N93dSrpE98sWyyVpNnz7vlX/vqoo4OcavPI9SNb3DKgjNxMkPzLu/vfdrQj0va3nQou3cvzf3q1NP0HzJGf5ZW3/wAL/L/u1o2ugwwyCH7GyGOXb977te/g8L7WV1E48RjIU9zHj0tNsvnfPu+8v92tOx8N3lxHHDNYbjDtfcqf+PV0Fn4XRpF2Q7f3v3m/irf0/wALwwx/PuVlf5Nrf+O19bgcO4xiuU+Yx2KVTmZzVh4f8+Pe8Kld22Jm+ZVq/b+FZm+dPnRW+9H92up0/S0jhhjRGil37ty/Mvy/3qvWeg7l+eZYl+Y7f9rdX0mHj7p89Uqcuhztn4d8z50sG2/89P7zVfs/Dc0qvD9m8oxvXT6X4ZRjJCLfZtZvK8tvl/4FWnY+HYbWFEfcq7t6/wD2VdMqZySrSlLQ5CTwvCsKfZkZljl3S/uqbcaDbQ/6ZCjeV/D8n8Vd5Ho810q+Sir8/wC9Zf4l/hpt54ZmWR0+V4vu/wB3atcNSiHtDzG48LzSK3yYC/NuX+Jf9qsy68Pvayb38yR9nyM392vUdU0WGNSiQtsjT/lj91v96ua1LSRIwh3/ADyfcWRflX/erzK1HmO/C1jhLzR5ncTJbMi/wLJt+ZqxNS0fyZGe58zcybdrfL5bV3Osx+XdPDvX5fuTfwVzd5bvNcI7zbYWZm3TPu3Nt/vV4MsLKLke/RxUTjrzT7lpA7wq3lptdl+bbXP61C9vveGFnT5WSXbXZ67DuuAmxl3fNuV/4awdYhdl+T5lX7lYuHU6lLuYCypCzzDrs27W/i/3alk/0i4PyLt27tzU+4s3hmdgkbBv4m/hao5pHkj3x7R5ibdrfw1rTpwcvcMvae7ZyM+5uoWt/wBzbNtZ2+b/ANmrJu9833IWHy/LV7UGePaiuxVk3bvusq1UuA7/AHGUv/D8n3q9PD04Hl4iXvXM+Oa2kj3puDqu7d/eqnLN5i7H+RV/8eq3qGxlZ0RkC/f21Raby4wghWYN9za/zLXfGPL7xySqc3ulmO3eZVP3yqbtu3atEMgbajp5b/3lqPYm4yI/7r+6rfNU8N1+887y2+Z9u1fm3VcfeMvQs28aMzB4Y2Xb8rL/AMtP96r8Ni8kbfuflk+/UFrDtYuibG/u1s2Nv5sKI/y7v4W/iq3KUYlxlL4ipZ6fBD9/a6s/zR1o2enx71Tzt+7/AJZr92rcNjbSKiTBcyfxba0LDTYYmEMKMyxr97/a/vVZftOaPulb+zd4XZjcr/Iq16f+znpdy8V/bWljI0s80EcUaIWaV/mAwBySTgYrk9N0eeRlTZ8zfxf3a+mf+CUtvHpP7Zvw9+0CRwfHemx4STYQTLgHODxkgkdwCOM5r9C8McW8u4up4tR5vZ060rbX5aM3a/S9rXPRyLEeyzeM7X5VN29ISZseGf2SP2pPGT30Xhf9nfxpetpl21pqKQ+Grkm2nX70Tgp8rjjKnkZGRzXD67oOueF9ZufDvibRrrTtQspmivLG+t2imgkU4KOjAFWB6gjNfpN/wUz/AOCoH7Sf7Pf7S9x8E/gvcaVpNhollay3V1caal1NfSzRLKQ3mZCIqsqgKA2dxLHIC5X7W114P/4KCf8ABNy2/baufBFhpvj3wdOtlrFxZ3BjTylnWOaEBmO+M+dHMiOS6Fiqsdzb/wCgsp8QOJvZ5fjs3wVOnhMbKEISp1HKcJVF+79omkuWfeL93rro/uMNnOP5aNbE0kqdVpJqV2nLa6aWj8tup+fPgnwJ42+JPiODwh8PfCWpa5qt1n7Pp2lWT3E0mBkkIgJIA5J7Ctb4m/Aj41fBc2v/AAtv4UeIfDYvd32N9a0mW3Wfb94IXUBiMjIHIyPWv1v/AGQf2W/Hv7P37DukQfsy6f4T0/4i+L9LtNQ13xD4juJbiDdKhcMDCH8zy0cLGi4iyWc78tv7XwB8H/2ifFnwh8X/AAv/AOCgPi3wH4r0LVLBvL1PSLZrdraPaS5lV4Y4l8shZElXDIykkngr8vmHjtSw+ZVXQpU5YelU9m4uo1Xmk7OpCKi4cqeqjKXNJLpfTz63F0YV5OEYuEXa13zvo2la1vJu7Pw/0fwn4p8RWOoap4f8NahfW2k2wudVuLOzeWOyhLBBJKygiNNzKu5sDLAdTXU6n+zH+0ZovgI/FPWPgZ4stfDgt1uG1u40CdLYQsQFkMhXAQ5GG6HI55r78/4IdX+j/D7wB8a9c1HV459I0W/tZZLgSJ80MEV2zy7QxABQA5yVODgnGa+cvjz/AMFdv2rPjhNrfhldfh8PeENadoJdD0S1ijuBYk4MX2p1aTeycMwwCS2FCnbX3MOL+Kc04txeU5Xg6bpYaVPnqVKkleNSEZWjFQfv6y3dtFe19fWWZZhiMxqYfD0ouNNxvJtrRpOyVt9/LueEfDb9nn48fGK1lv8A4VfBzxL4it4G2zXOj6LNPGjehdFKg+2c1k+Pfhr8Q/hZrZ8NfEvwNq+gagF3fY9Y0+S2kK/3gsgBI9xxX7IeKdb+O/xb+APgvWv+CXvxT8CadoFhpMcFzpuowJLLCqwx+Va7tsiQuikh43VWBx83OK+Zf+CgXx0+PUP7HjfBL9uj9nG9PjGXW4ZPDfjrRjB/ZBK7mEhljLhLkoJUMAVdyMz/ACYAPz2QeKec53nFOh9WoqM6nI6XtWsTTV2nOUJxjGSVrtQbaT8jiwfEOKxWJjD2cbN2cea1SPm00k7btI+BPBPgPxt8SvEcHg/4eeEdS1zVbnP2fTtJsnuJpABkkIgJwACSegAya1vib8CPjV8Fza/8Lb+FHiHw2L3d9jfWtJlt1n2/eCF1AYjIyByMj1r9Brr4gab/AMEqf+CeXgzxF8KPB2mP8RPifbwXN/q14/2hQzQecZThsOIo5I0SNcRhnLndlt7P2Av28fE37efiHW/2O/2yPD2k+JNP8SaRNNY3cVmLV3MWHeFxEVGQoMiSIFdGjJycgp34jxE4ilhsRnODwEZ5bQlKMpOpatOMHyzqQjbl5YtOylK8lF6q+m086xrpzxVKinQg2m7+80nZyS2svN62Pzg8N+FPFPjK/fSvCHhrUNVuo7aW4kttNs3nkWGNS8khVASEVQWZugAJOBXX+D/2U/2mfiB4Vj8ceB/gD4w1fR5lZoNS0/w9cSwyqvUoyoQ4GCOM8givt7/gkD8Nv+FM/t7fF74TXN07S+H9JurGIJIsiSRR6hEodmB+9t2cY/iYHaRiuV+IH/Ba79ojU/2j4bf4fWOmaP4Is/EEdoujSack9xe2izhWaWVuVkdc8RlQmQMsQXbpxvG/FGOz+vl2QYOnVjSp06rqVKjimqkXJJRUW7y+y72VnfdW0q5rmFbGToYOlGSjGMuaTa0krpWS3fT01Pg6eCe1ne2uYXjkjYrJG6kMrA4IIPQ02vtP/guj8P8Aw74T/a203xVoyeXc+JfCsF3qcawqqtLHLJAJNw+8SkaA5HGwcnPHxZX3PC2fU+J+HsNmkIcirRUuW97PZq9lezTSdlfex62X4tY/BU8QlbmV7di94Y8P33i3xLp3hXSyv2nU76G0t9+ceZI4Rc4BOMkdAT7V+mvx4/aE+Fv/AAR68IeE/wBn34EfCjRNf8a3WiLd+IfEepW/kvMhkYeZK0f7yQySCbZGZMRIij5hivg79iEaKf2wfhn/AMJD5H2T/hNtO837Tu2Z89Nv3ec7sY7ZxnjNew/8FrP7S/4bt1X7djyv+Ef037F97/VeTz14+/5nTj8c18RxbgqHE3HOByLHXeFVKrWlC7UaklKMIqVmm1G7la9tdbnk5jShj82o4SrrT5ZTa2Ummkr27XufQC+JPhT/AMFfv2TPG2u6r8NdH8K/FTwNCt6mp2Ft5jXCrFI8Y8zb5rQyhJozGS+xgjjccCvzMr73/wCCCH2j/hb/AMQ/tez+y/8AhEIvt/mbsbvtA257Y2+b159O9fC/ir+z/wDhJ9S/snyvsv2+b7N5G7Z5e87du/5sYxjdzjrzWnAtCGR8TZvkOGb+rUXRnTi25Kn7WDcoJu7teN0r2SenW9ZRBYTH4nB078keVxW9uZar8NEe1f8ABND4PeAvjl+2b4Q8C/EqCG50kSz3s2n3AQx3z28LzJA6sRuRmQblAbcoIIwSR9d/tS/8FZPi7+yb8ctZ/Z8+G37NfhrStD8OXC2umRX1tNGbiLaCssSQNGiRsCCoAPHU54Hyd/wTL/Z58eftB/tV6Jb+CfGF54cXwwy61qHiCytxJJaxwuu1EDfIXkZggD5XBYlXClT91ftCf8FpP2efhX8XJvhzovwo1HxiNB1BrXUtejngijilRgshttysZdpBGT5YJX5SVw1fF+INCWaeIMMPDAf2lGGH96hzumqMnNtVHL4G5rRJ+9Zel/LzmDxGcqCo+3ShrC/Lyu+99rtaW3PJ/wDgqD4M8AfF39iLwF+2ZqPwns/BHjbWNQgW/sYreOOa8juI5CRKfkabAhSVGIZ1RiCACxHl3wS/4LRftBfBD4VaJ8J9F+F3ge7s9Csxa2tw+nTQO8YJILJBKke7nlgo3Hk5Ykn2j/gqVp8X7av7JHhn9tT4IfEHUbzwr4fDDUPCVxaIptWllEUs77CSs0bBUdWLrsO9GVdxk/NRVZ2CIpJJwAByTXreHnD+ScUcErB5xSVT2Ner+6nz3w75naleVpPli93pr1sdOS4LC4/KvZYmPNyzl7rv7jv8Ouui/M/XX/gnd/wUX/aF/bH8ba/J458AeE9E8I+FtJN1rOrWMdwHErZ8uMNLOVXhJHZiDgR9twNfkt/wWB+PVh+0ZqPxQ+L+jaNaWVhqE8cenR2lmsJkt45oo45pNoy8rqA7MxJy2M4AA/QH48sv/BO//gmJon7Ptk32bx58V99z4kKnEsEDohuFP+7GYbbHfdIR3r8p/wBr9zH+zh4ocDOLaH/0oiryOGuHMkWBz3PstoKlh5UqtGgo3tKFOLU6mrd+eovdfRRt1OLDYLCRwuNxlCCjBwnGFuqSd5fN7eSPg2S8RbfY8jF1/iqpNqE6t/Ds2fL/AL1U5ryZmf59yfwVQupnkjXD1/PnKfkMqxcm1b922x2P/AqzbjUHkjbemdv3WWkmkddyLyGX5v4arNNH/tDy1/irOW5cZcwNI8cn8S0jSOrnY/3v4VqGY7dpfcSqfw/dqMzZUOEbdWEtjqp+7ImaaZGZy6j/AGtlSwyOWV0+9VZd7yBH5/3anhXdl3+U/wAG2uOoexha0omjDG7D54dir92tGxby1SHZlt27zFqlZ/LCEwx+ati1jRcP/F/HXHKP8x9PhcRzcpahhTy98P8AF9+rEdttUzJuKKn3aS1R5Iw8m77/APu1fsbXpPHN8v8Adril7srnu0cQVYY2+/N8vy53VIlvtb7jP8/3mrRexRo1d/Lb+/8A7NJ/Z8K7pidy7N336x5uY7adacfiM+S1fcQ8O7d83y1XmiRV+RMH+7WnNb/KuU+WP5qrzWs32hpt+35NtEolyrlNpBuaZ32f7K/eqJm2NvL8rLT7hUkm2TcbV/76qpcEQo3kyfMvzfN92tIxlzGFTHRiLNeBWe2RGDt/E1U7ieETBLlGO35d2+oZpn85HhfLfxVD9odd2/qu7/gVdXs+b3jzamYdB9xcOsyif5F+7uqvdSOuX86o7i885fJdGqBr0RwtsfJ3fJuropx5Tz62O5pEs155UK702ruqvJfbpGd9v+z89VLrUPOP94N95WqtcTeW33Nyt/FXXGj7p4uKx32UaX2oudnZanspt+P7rf3ayY5vmZEdvm+61aemr5jff2t/DW/wnhVsR7T4Tcso33b04WtnS4XW4RJH3BlrF05Jm28fL/drpdMt3aRPnXarf8Cp8sDm5jY0uFzGPkV9r/8AjtbNjDC209m+X5vl21R02NIWLumFb+Kuk0u1hVVd4f8AcrL4Z3OeUuaNi/oP7mZI4fubPvNXX6DDbMu9LbfL/wA9N25f++a57SbVFuN8yL8v3P8AZrrdCj8uT7mX2bm2pWhidT4f0+8uGKPNuVolZdq7du2uk0uFJGWR0VkZd0vz7a53RZkRNjvMszMvlLu+Xay/d/2a6OwmhjZfOjX7vybU+61VH3fhDl5QGy3j/hG35khWql5D51wdm1v7rNV6S6m8tZpJl3tu3qyVTjuU3Lc2bsys3ySMny1fuSNKdTlK8kMduypv+8v+saqdxvZvJ2ZRV3eZ/C1W/tJf/Rkhx/tN826qcjLJMUlO2Nfm3fd+asZS+zE9zAynKUTPvf36+SkOX/56bvu1iapbpNsSF1A+b7qVt3kKRxpNs+bft21laq00a+TbJ8rbtn8VZR9pHY+xwdPmjqchqywxs0yfK6/w/wANchrC7ZiXTP3vu/w12WrWb7v3zqv95VX+GuZ8QWoVW8kLsZ/nauWpL+Y92jTlLU7e31BJIf3L/NGu5I2q9a6gJpjIiMg+X7r1xseoRxoqedtH3XaOtGz1S2h2o03G/d977tedHnifASlA7iGbdGX38bdrU+2ukj3cMrM/zN/Dtrm4dY/c/Nxu+6y/ebbVttUhkt38n94zJ91XrzazqrRHTTqU4yN+HULaPc8Lsksnyoyr8v8A31TI55re3XY6nb8u5n+9WNb3jiNoNi7Vfd81XIrp5IykyLsZP/Hv4a8mu5KpyqR6+Dq88byNmHZNGs1ymGV9u1vutT7q8FvCwuXX5l2qu7btrNjukMKo7fPH8yf3V/hqS1vIL6x3/u5fMfci/wB3bXHUlHnPZpy5oDrqTzI1k2b2j/vJ/DUV5aw27L533m+ZNvzVZk/0hlh+Vn2bdy/Lu/3qSRbby9+9Qrffb+7XVQ1mOp8JiapNc+W6WzruX5kVovu/7K1jXkLyZd/mMe1d2zaqtXQ6g0LW7J/Av31X5WrE1C6RQvztv2/73y19hl3wHFUl7vMZsi/aJntbZMt/D8nzNT4YfMVUebDbPlZU3fNUbRfM7pM3y/c21dh2QsPOdkf+6qV9LT+A8DFVpx+IrrbutuJndSV/9BqnqGxV855vODJ91V+bdWpIvlKnkw7F2t82/wC9/vVmalHJ5jQyOu1fvqv3lrq5zxpfvJlKaZI1RHRlbbt3b6YzIsjw+crbk3bmpzbIYWTfGq7/AJWb+H/ZqhJBNt3ojfdrCtU5YHXSo8vuotWcwkkCO/ys23atbVmqRt+8fcNnzrXPwxuqxI/9+ta1kRZgjoyL/eb5vlr53GVF8UT1MPTf/bpu6e3lqm+44X/lntrThkfzP9cq7f4mb7v+7WPbzDyVPnKrbv4v7tWvtGxvnmyknP8Atbf9mvAxFTmPao06UY2NBv30bI7r97/eanzX00kzwokap8rfvPm+XbWV5w+xjyZmR/N2qzL/AA/7taC3jrblEdXdkVd0ledze6dHs/dLlvJuUQ/K7fdX5KsW1ws0ivcvnzIti/3l21Rt1SS4+5t2v8u35W3bfvVow2v7x53ufk+VXZfu0/iOOUZx940tNjdrdYN6nb83zVY2zR3IkR2Xc33V/i3VXt/JiXyfJVH3K25n/wDZasrav5n7mRt7I3y0SlL5GMYe0nK4+K38tnh37tr7d0jbmVqFWCSNZppst975U+VqmUpKqvMmz5V3Kv8AFUbW94rM72ao33/mf71ZyhGOw7S5eUga5hmtXuXhZVVN3y/eqz9lhZT+5kD7Pu/xU6OSY70dMfKvyqnzNTLhLm3kSbZt3bf3ivuatIx55cpy1o+7qYmoSWelw70Rssnz7k3bWrntQH2yRv8ARm3L/E33WWul1+N7i4N5DtdVfa/z1zWoRwx7oV+V9n3Wr08PT5o6RPCxEuaXumDJGjTP5afd+42yq81n++aaHa/9+P8Ai/3q1rrZJl0eP7nzMq1SVXhZ/n+b7uP4lr1OX7J59SRB5c0nyQ/39svmJU3lia1DvCzpu/hWnrG7Y8sbmX7/APtVZtYvtE/kzXjAL/d+bb/wGj2ful0Zc0Cp5Y2/voVO75WVvl2/7tV2sUjjbejPub/e3VtSKkzB4U3qrbdrfxNVeOx/el5LZUP3nkjeol7p1x+Io6fZ/eQw87fkVv4auwR+VG6Sxrhmot5k+5nH+0v+992o1me3byfmfy23fN/drCMpR+E6vspMst5zbpk+ZF+/t+WrOn3UNvHsR8Kv/LOT+Gs2GSa5kZ3TLs3yfP8AL/3zVea98lvOnmwv3fmrro1JHJUj/Kbcl9DGodLn/WL8ysvzf99Uv26FkHyRna/z7n2/LWPb3ieSqeYxT/ZpJ72OOTej4/vq1dkZe8eZW90172eGe4RAi/d/hf8A9Cqx532fbD2/gZV3VjrdQsrunySK33dn3f8Adqb7T9oWJoblVf8A2q6acub4jil7sjZ+1LuTY+7anzts+7/s1t6LFtl3pMuJF+VWi+Zv71c9Yq8ypDNNsSR/8tXYeH9N85vJRFX51Zmkro5faE85o6fpT3W3f13/ACRsnyr/AL1bsPh3czMjq80iK3mR/d+X+7Uul6ftBezRQ+z+J/4q6O10b7RGEQbWVtm1v4quMeWPvC5omFp+h/Z1abyYyrJtfa+7bT5PDkKxF/tK7F+b93/C1dXa6DulXybNfN+9tZPlqxZ6L5KvClmz7n2/Kn8VRyw+IfOecat4dmt5P3yM67dzR+V95v8AerEv9FtrcD5edjMrN91f9mvUdY8PpLM6P52/+BlT+KsXUtFmFn8kKsivu27aOXmCMjzDUNJeH/SXSNk2f8s/4d396sO68P3jLLDA7OrJuTdXp974Z+0RtBMjfvH3vuT5VrOuPC9+qvsRSfvP/srXLKjy6le1PMJtBRVl85Gfb8yMsXzVNY6ait/qWxH823b81dxeeF/LkEyJI67/AOH+KiHwztVvJhkUSbt7N95VrzMZh4VNGdtHESOc0/TUa62PCuzbteORPvVvx+HXWEJ9maV9jbl/9lq1b6T9kUpc2y7vuOuz5l/2qtWbOszQyPJhm2/NF822vlsVgYxq3jE+iweK93lZSh0tJIR5O5N3/Lu33lqa30vcslh+8VNq7W3fxVanjtkZZv7vzbv7rVYsy/lbPJZnVfk/u/8AAqzjh4yp/CepLGSjLkiQ2Okv5MkLou/YuyON9vzVv2Ni7RxzJuyzqssap8sdVYVeS3ihS3b93t/eVuaXawyRpFMmBvVv+BV7uCw1tTzcViOhp6ToYZhDNDtaH5vl/irWs9JhuIzDC7I7L/wKo9LmTef3zeVu2+YqfNW/pqvHPsTblvldpF+8v96vpMPR948CtW5jMOg/6O/2Z/461rPR3dVjm3NtXc7f3q1LWz+XzE2/vPueZ92tSx0lLyZJ5o9g+83l/wAVetGj2PLqVDPsdBhlVZnmb5m3Mq/Lt/2a2LPwrDdI5mh3S7N2373/AHzW/o/hlGjEJX5Gf/WL81dLpfhW/t8eXMv+xJGn8NdEqPumEqxw8Ph1J49727PtX5fl+VaLzw/NcWoRN21olTbt+aSvQ4fDKJGqbGY72+9/DWfdaKi2cMN1uaNV/wB2uSVMcah5dc+GXhbf5PlNJ8qK33ttctrmi+TdSpNbbdqV6tr2jfvpU+Vvn+XzPl21xviS18mR08mRVkfbu37ty1w1qJ1063KeWeINMhb5Hdk3PuRW+61crqlvNHv2bW2vu+VflX+H5a9H17T4bht4tt7Rv/F/yzX/AGa5HWLGOEi53rt+bev92vNqUaXLY9ClWv8AaPPtWs3mnEkz/wCrXbE396uc1Rkjj+Sbd/D5jJ8zf7tdv4iExh3/AMbL93eu3bXE6pHNHDN5L7VV93y/w15dSjL7MT0qOI0Oe1HUI5pNiOzJs2tI33aozSQ+Y0O+R1z91flqXUpI5LgQ+Szovzbdnyt/tVTuNQjmk2JJhNvzf3VatoUugSrRkJdXELIjzJIny7Nyv8yrVG4mdV2FG+V/ut/47U9w7xxjeik/e2r/AHaq+dumW2SPb8ufMrrjHlOSpLm+Ijk2LDv2Y/56tWfNDbQtlIdrN/FVq6Z5vkSZkT+Flpqqkiok3Cr8qybN1dHLzR5jn5v5itHbwrIjo+7bU9jZvuKIkm9m2r/C1N3JC290Zmb5f31XrOGbyW2Ox3Pu3Uvdpl048xYs/JWZIZ9vyrt+b+9XT6PYxyzt5KM3lqqqzfdrAsbEY8+a23Irfd3/ADV2Xh87Y0dEyfu7V+8tZ81ocp1fYLdjorxyRLDMsqr95ZP4latvT9LgjUeciu0n39vy7as6Lp9s6p8kbSt8vyo25f8Aere03Rd7Dem9o1/u/Ltq6fvSMKlP+UpWen289mqQ9W+dFj+8v+9X0F/wTJsbWw/bP+G5uo5Gjfxzpu0xsAS/nDackHgMVyO4z0615FHY2f2jYlsqPu3ytH937v3Vr2D9inxX4U+HP7Snw58a+MNbj07R9I8WWN5qF9cKxWCFJ1dmYKCeAOwr9O8Msu+vZri6ibvSw1eSSV+ZuDp2/wDJ7/K3U9bh/De1xdR3+CnN+t1y/qfpD+3z/wAEovEX7XP7QF38ZfhV8YtEsrq4gtrTxHpWro7G0kihQIyNCGOWi8s+W6rjhgxDgL5P+3F8Tvgd+x3+xbaf8E7vgp8Q38R+Iby4Evi3VdPlj8uPE/mTpPsdvKkeRFUQAkrGnztyN/zV/wAFWv2kvDfjf9uTxb4n+CPxCs9b0ie1soU1HRL52hlkhtY45AHUhZAGVgGQspHIJr5bvPiRq0JdhBbMQu7mN8n9a+l4W4gyWWAy2GeZnOpRwqpzhQVDl5akY+6pzTbmqbuo6K9k3c68FnOXQpUI4zEuUadmoKFrSS0u1uo9D9YPg/4i+GH/AAU+/Yr8N/s2XPxjk8KfFPwNFDFpz6jcgNqJiiZFZEVw1xC8KgOV+eJ0DFWGPMx0/wCCdvwF/Y8+F/iL4if8FCfjq2vvcabLD4f8MeHNanglmk4HmQCR0e5m3MuEKeUnLSblPy/lSvxn1+yuEuEsYISvzRyKXDA+ow3FVtV/aH8XahcPLqTW900Q2LLPJK+T6Alulems54cw2JqUMuzirQwdSo6jpRoe/Ft80o063xQjJ9EnbVJ6u9f25lFKo4UcVOFKT5nFQ1V3dqMt0n6aH6e/8Er/ABJ4P0j9lf8AaVtbnxDZWCz+GS1nBqWpQpL5Rtb2JS2SufnliTdgKXcAckCvg61a2W5ja9jkeESAypE4VmXPIBIIBx0JB+hrx2//AGhvGFpvSHQdPZlOCSzgA/8AfVZN7+1N40tdqHw5pqyE8oyyED8Q1fYZXx/wLlGcY/H/AFmcnipQlb2cly8lNQte7ve176dvM9TC8U8P0MVWre0k/aNO3K9LJL5n7NS/8E0fh38aND8N/F//AIJn/tHweG4n0a3XW7O48SXLzrPsDeZLJAWeGc5xJCVVQw+UIPlrov24vEOm/AH/AIJv3X7OH7TfxvsPiL8R766iGnL9t3Xlu5uPNSZtxMxSJFcebIBv3BOAcV+Gqftr/FHRLiSXRdK06BsYZoZJ0bHvtkFUpf22PiLcTm5v/D+ku0nMkrecx3e5MnNfBLP+GcRmOGqZhnFStRw9RVIJ4a1ZuLvGMq9+ZpXs9E2tDzY5rldXEU/bYqU4wkpK9P3tNk572P22+F198Hf+CqX7FPhn9mjXPiknh34peA44o9LbWJEZr9o4WQNGm8NcRPCoDlRvidAxDDHmbX7OP7Jfwr/4JKprH7T/AO1R8ZdK1HXV0ua08OaBobYknVinmeQsxR7iZvlTG1UjUszMQcp+Gdj+2l8QkkWaHw7pUc0Q37oxMNp9Qd/Fav8Aw2L8S9ckW41zTbCZwuC8sk0hA9AS9ZYziPg3kr5fh83q0surzc50FQvL3nzThCrvGEn05XZXXV36pYnL5KdGniZRoTd3Dk11d2lLon6H68f8EfvjNbeOv24vif8AFrx/4ktbKfxD4cvr921K/jQ4N5FOygsRlY4kYkgYVI8nAFfDskkJ+KDSi6h8v+3yfO89fL2+f97fnbtxzuzjHOa+c9P/AGofFl118PWK4OGyJF/9mq7B+0V4keIzNpumlduV2JIdxzjH3q+py7xP8NMqz3F46liZ2r06VNQ9lK0FSUoqz63UtrK1utz3MLi8tp4qpXpzdpqKtbblTX6n6g/8F3PEPh7xH+0d4QuvD3iCwv418Cwl2sryOXaHuJpUJ2k4DRujqTwysCMivh6vI2/aF8UAZbRLA/u933n6f99VHcftGeI0fZFpOncfeLh+P/Hq34U8XPDfhfh7D5VHFVKipR5eb2UlfVu9tbb92b5fjMBl+Bhh1NvlVr2se3eF/EF94T8S6d4q0wKbnTL6G7tw5IG+Nw65wQcZA6EH3r9NPj5+z38L/wDgsH4P8J/tB/AT4raFoPja20RbTxB4b1S5814kEjHy5RHmSMxyGbbIYyJUZT8oAr8V5P2k/FKR5/sbTA2cbT5n/wAVUcX7VXj/AEqX7dpunWELp92WF5VZfxD15vE/ilwDneLw2PwGYVMPiqHMoT9i5xcZq0oSg7KSdk97pq61McfXwuLlCvRquFSF7PlurPdNdUfs6nhn4Vf8Egv2S/G+iax8SdI8U/FTxzCtkmmafc+WbdWikSM+Xu81YYt80hlITexVBtODXzl/wTN/Yb+DH7Z2s+J7X4sfFy60ZtEtI3s9F0ieGK8uQ2d1yWmR18mPaFYKpOXGWQY3fm/q37XPj0SSXdxoumyuV3tJKspZz9S9Yl5+2l8SLSISxeE9GbIycCXj/wAfrjwXHnCGFynGKlm9VY7FyjKeI9hquWyUY072UVFOKV76t32txRxGGoYeqvrElVqNNz5e2yS2slp+p+sP/BOP4xfCD9ir9vHxL4J8VfEjS9R8MahFdeH7XxvGWS1JWdHhnJyVWNzGFZssqkht+wFj3fxC/wCCHPi34g+Mb7xz+z/+0B4S1Dwnq91Jd6XNfSys8ccjlhGJIFkSYKCAJARu67RX4r3n7cvxHtpfLHhHRf8AgSTcf+RKZZ/8FGPjVpQeystG063iBJ2wT3KKx+glrXH8c8OvOHmuUZvOjXqU4Qq82H9pGpyX5Zct48stX8Lt5IxxOY4WGJeIw+JcJtJSvDmTts7aWfofuD+1Jc/A79gr/gnXqf7E2g/FXTPF/jTxPqm/VoLSUbrZzLFLLM8cbsYFVIYkRXbLsd20jeB83/8ABLL4HeFfjd+1zosfjjWtOttK8NRPrdzbX15HG161vhkiRX/1mGxI4wQI4nzgV+X8/wDwUB+KCF3l8HaFvByQVnyT/wB/Kgk/4KE/FSIgjwPoQB77Z/8A45XZlvGXBmX8N43AU8yqvEYpznUrui789RKLlGCaUUkkkk9O5lSznKMNgqtH28ueo23Pl6vS6XTTbU/Sz/gop+0vL+1L+1Nr/jewvfN0PTZP7K8OBH3IbOFmAkBHXzHLyZ9HA7V8rftHeDPEXxC+CmveDvCdmtxqF9BGttC0yxhiJkY/MxAHCnrXzpc/8FFfijChKeCvD5b+FSk/P/kSq7f8FHfi4kYY+A/Dxbb8wCz8H0/1lfT4fxB8OMPw6smpVJxoqn7LSDvyuPK3e2/W7T11ZvLiXhuGAeD5pKHLy6Rd7NW+8464/YW/aYeTKeBrYj/sMW3/AMXUD/sG/tNlsR+CLcBVwv8AxObb/wCLr0zRv28vjjrkipZ/DvQDvxtGyfv/ANtK9e+Gfi39sH4lzNaaP8G9PkmePfZRQ2VyxuR6r8/T3r88lgvByK1xOI+5f/Kz4udPgKE9a1W/ov8A5E+Um/YE/abBLjwhbkkcj+17br/38qAf8E//ANpxl2N4HteDkE6xbf8Axyv1T/Zj/Yr/AGkfiLq9sv7St/4d+G+nXC5828hmkuB6fuQ5YfjivS9Y/wCCedsnjWx0Lwp8f7LVNOmvvKvNRTw1Mojizjco87JP4Vj9W8F3L/e8R9y/+VlqPAkNVUq/d/8Aan4uz/8ABP8A/ajkO7/hBbUt6nWrb/45UR/4J9/tUHA/4Qe1Azn/AJDNr/8AHK/W74l/8E9/2qvB2vX1ppPi3wQbRJm+wLqXmRXEkXUOyedx8vNdBoH7FvhnSPDMeo/Ez9oa3k1JlDSWPhjwZd3EaZGdvms+3dWc8J4KL4sXifuX/wArLjPgWW1Wr93/ANqfjmn/AAT+/amU7f8AhBbXnuNZtcD8PMqxD+wD+06pBk8EW3y9P+Jzbf8AxdfqlqX7Pn9sytD4A8WXYbcRF/bHh9l8znAGEm+U/XNeYfHD9n79v74T2suu6N8MvDmsaXH9yZEnjkk4yPlMny/jURwHgpU2xeJ+5f8Ays6IYjginL+NUXy/+1Pg22/YQ/aPTa8nge2DL/1GLb/4ur8X7Ef7RuVVvBlsu1cbv7Wt/wD4uvSNf/bJ/aE8K6pJpOv/AA20GCaIYkj2T7g393/WVn/8N7/F0bd3gfQVz97Mc/H/AJErmq5d4Hw0lisV9y/+VnsYarwvL+HVn/X/AG6cxbfsYftBwqEfwtbnnOf7Ug4/8fq7bfse/H22gyvhe3MpbJb+0YP/AIuuli/bu+JUi7h4O0Tn7o2Tf/HKng/bl+I0/wAq+EtEB91m/wDjlck8v8CeuLxX3L/5UerTnkmnLOX9fI5Zv2PvjyzAP4at3XdnH9owc/X56mX9kD41JEdnhCAOPuf8TKDGPT79dOv7cHxCYKF8K6KWLYZQs3H/AI/Uq/ts/EGSMtH4V0cnbkKY5v8A4usnl/gNHfF4r7l/8qOh4jKIvWcv6+Rx0n7H3xzkkMknhOA+w1OD/wCLqGX9jn48Stz4UgUe2pwH+b12LftwfEeMEv4Q0bAOGfbNj/0Oobj9uz4gwnavhTRM7sAFZv8A4ur/ALO8CP8AoLxX3L/5UR7fJd+eX9fI4ib9iz4/lCq+FIGBOSv9qQf/ABdULv8AYf8A2h5590fg+JU9P7Xt/wD4uu/uv28/iZbyso8H6GVX+LZN/wDHKoz/APBQj4oRS+WPBWhd/mMc+OP+2lbU8B4Fx0WLxX3L/wCVGNWtkUvinL+vkcHP+wx+0lv3ReCbYn+8NXth/wCz1Rf9gz9pl02f8IPb8nLf8Tm2/wDjld1ef8FHvivaKWPgjw6SBnG2fp/38qg//BTX4truK+A/Dhx0AS45/wDItdEMu8EJaLFYr7l/8rPPqVOGoy96pP7v+AcZL+wV+1KwwvgW3Pu2tWuf/RlV5P8Agn9+1NI5c+Bbfn/qN2v/AMcrtJ/+CoHxbjTcngPw3nGcGO4/+O1UP/BU74yAE/8ACv8Awxz935bjn/yLWqy/wStpisT9y/8AlZzyqcKy3q1Pu/8AtTkT/wAE+/2qdpT/AIQC1I/7Ddr/APHKhf8A4J6ftYOdqeBbNF2441q1/wDjldif+Cqfxm8woPh74Y4Gc7bj/wCO01f+Cq3xjZcjwB4XB90uf/jtbRwPgt0xWJ+5f/KzjnDg6W9Wp93/ANqcrD/wT4/arUqx8C2ile/9s2v/AMcq7L+wp+0vo2nS6heeBIZI7eJpJEh1S3diAMnCh8seOg5PaultP+CpfxiuQCfh94aXPqlx/wDHa+gP2Pf2k/Ff7Rena7d+KdD06yfSprdIl08SAN5gkJ3b2b+4OnrXrZNwp4T8RZhDL8FicQ6s72vypaJye9Psi8FlXCeY4lYehVqczva9uiv/ACnw7pEa7wrBwScEEfMK6zS7d1kTfD8zfM237tafxtso7j49eLHUGMr4kuug+9+8ak0O3n3L/dr8TzHB/UcZVw978kpRvtflbV7dL2PiMRSlQrzp3vytr7nY1tHt/MZYUh+81dLY2aSTGGNMrH833fvf7NZej27j5H+8r/LtrprfT5Fj3un+0is23dXFzcpzylyF3SdN8uTyZodzMm3cvy7a3dLidmSF3bb/AHv71QWMMMkLWz2zFP4V+9WxZ2/8b220fdX+61Pm5iJR5vhNGyEkKxQ7N4/hkb+Jq3tL1Dy02zTZ+Tcqqm75qw7dZsfaYN0R3bkb7qx/7K1qWFtbW9ujTQ+Tufb8yfd/2quBMi1czQqsWxFT5d0qr/eqnqFwkm+HYw/uKtLPdTW7NZzeTMsbbl+X5apXl1Myr/q96tu20c3KXEkWTbNsRG3qm1lrPkmkupvkmbH93Z/tUyS4SPMzuwRn+9/7NTPtUN0okeZok+ZYpFT5d1TKXKe3l0e4XUkMkj3Oze8fyorJu21j6zJtmT5GVmdtqxt8taNxIkluiO+yTb8jbvlb/ZrHupEkmWG5f5fvbv4lauSUub7R93gXyqKaMPUFSMtB5yszfNtX+GuR1mP9ykcLqy72+X+9XXa03lwvMnKsv/Aq5TXIdzJ5aNt27kZflrnlLm9496lGMdeYry3CKyIiL+8+V6t2t9tkXznVF2fdb+KsRrzayPvzt/vJVeTUt0iyPwuz/Vt/FXNHnPzCVTmO60XWIWX9/Nxub5f4lrW026trdt7uzbvm+avO9J1ZIVRN7M33vmrXXXnXP+krt+75f96vGxPtfe7G1OXL70jtlvkurUu7thv4l/iX/wBlp39qP5aCzhZ0+ZmZZfmauQHiR0hZEk3bflfdV+z1jzIza+dsVXVt1eBUouU+ZHtYWXN9o62x1iS2dIX3Z37F+Xc21vmq41x5kZ+7v+9u+7XN299JdFB521l+/wDP/DWhZyIrFH8xWX5otyfeqKFGfOe5TqezjyyNrzHkmebyWMm7au1vl/3qfdXEMe6aa5VW2fLt+7uqpb3EFwqf8sw3yvN5v3aJLeOZUTf/AAfekT73+7Xt4OnzfEZYip/LIjuNkm1E4eRfvL8tZtxb3klx878L8jbfl21uLB9oX/UtujqO6tY7yHY4+6n3v7y19Pg17P3TzK2IjH3TCk0/zI1dONvzOzP/AA0tvsa8f52ZpPuN97/vmr0luhkCJCwib5fm+792nx2m5UuoU2bovlXf/FXv05R6ni1qntJycivqFvCsYeGHemzdu37ay7qQzTP5iMrf3VTbV+8t33eXcjftTcm5/u1l3TS+dve52nZt3N92t5S5feOen/dKF1CkanzpmUK25F27laqkzbcuH+ZvlZf7tas1v5kcfnTN5n3VaqElu/2xt6bH/wCei1wYip7p6NOMiCNXm2P+7T+5Vu385VD72eZm2/eqNYPMmTyX/dKu5/k+81W4YMZTzmb5vkZa+axlT3rnsYWPuk9nL9ouJXfh97fL/DVuG8eRnS5T5V+42z+GqqshUon36tL94IEYjZ8v8VeZUfN7x6dGjy+8WY2tppN/nbSqbX3JViCbzmX7Z95flXc/y7arR280LJs+ceVudf4t1SW6+Yr/ALlh/Du+98tc/uSNKnuwNe1+03lwk0D43fK/+1V+PyVmhtprlQVdml3J96sSz3syJ+8zH8z/AC/L/u1s6XI80x/0be0f3amVP3tDjlU5o6mxbh2bZ9pVCv8Ayz2feWtK1VP9dCiurfNuZvmWsuxW8YI7vx833fvVpx7LiHzoUjjPlL/Dt+7XNUjOUeUI8kpFhreby2ms0VnX725PlVaS3tPMkbzn+78rfxbv9qmwu8kPkO8jj7rtsqWOPdGuyZdu7aiqm3atTGE4mcpR5vd2EWNFkREhy0j7Hbzd3+7TZoXVf9TtLfLu/u1IsaW+XQ/LI/3VqteX0MzOiI0bx/8AAvlrrpVJc+iOKt70TA1CPdJ8+52+ZUXftrDvpt2XhgXP8asnzLXQ6hIkLLN5zM8fzbv4vmrD1CGb7Q/nOxRk3Oy/LXv4X3TwcRExbxUmV4RJ+6X5vMb+GoL6zhjVHfzHH3kXb/FWhND5MbSvtZN/3W/iqC8V2kLu7BWT5o1bdXdGPtDhqRjGPvGck0Nu0nzsjt/Ez7qs2Nxc3ipvRVaFOdv8X+9TGjTzD8nH8asm7dVm1VF2JbeW7N/d/irSUfsnNHmj70S4stzBGU2b9yMys3y7ao3Vwlzs+Rl/vf8A2VXbiSe1ZrZEU7l/4D/u1VZtyn59rfeRf73+zXPKnE7qdScdSOzTdA7ui7t21G/vVFbyQ26ed8o+8qKz1PHZurffVfM+ZNr/AHaq3Fq7Qt523fv/ANXt27q4pHdGRG15tUzJbSD+8v3dv+1urOuZvOZtkzbmfc67d1Xmt08n99D95Plj3/erPuI3Vt6PtXft21dP3feRnW94qSag6rJ5Pmf3U+bbVyxvPtiK+/8A1a/3N1Zl1au0i+dHvVv4m+6rVoaRbvax+T5LfL8u7furvpyjI8vEe6XVkubi4/0lF2/KyNH97dWvp9i8nlZ2lf7rL826q+l2PmN86MWX5UVf4Wrdt7V2u4vvH/pmq/xf7VdlPc8upI0dJ011VZkdZG/uyf8Astd/4X0GSaFIXhZFuP8AVbn+7/tNXP8AhbQ4VkU78fJuWRmX71dz4b01G8nZdRy+Wm5Fb7q/7Nd0Y+4ZSlym74b0NI1+4uV+V2X5t1dFY6KkcnnWb53PuRm+Vv8AgP8AepfD9snyzJCy+Sm3a33m3fe211+l6fZria2h+ZV3Rfxf71ax/vGEqhj2ehvGyTfvGZfv7m2/LVqPw88du23d8rs3mRvXT2OlpMo3w71k+Xbv+arlroX2e3fenz7/AOJPlqfZxkL2hwWoeF9sweG8b5tzs0jfxMtYNxob2qr5af6v7i7t26vS9S8PzSTfPD8rbVesrUPD/l/vnto3WP7jKnzbafLKKI+sc3uo83utB8uFv3O+L5v3cn3l3f3aoXGhwzbvkyq/wyJ97/er0W80d5IQkyKrKjfeT/vlayL7w68cYm3rvVFbatTKnAftPe5UefXWh+cqvDIyIq/3aqX2ipNH+5fcy/fXdXa3Wlv5Mlr+8VvvfN91ayLiz8uGSGz3M/8AeZf4f71ediKZ3UZHKXUPkhofJbdJ/rW/5aN/u1BPZvHIpmdkkjT5P4W21tTaajYvH+V9+0LJ8u6ql8jtumf5Tv2LtfcteNiKMuX3T28PU5Sh/ZsMkbI824SJ/C3ysy0iL9laK2hjYeZ827zdq1JqH2do/kh2NI251X7tCXyNJslH/XJW/urWNLD8252e2/lLtvZvuRH+VV+Vfn+atuz85bjZDwY1+81YulzQSKqTncPveZu3fd/vVoabeOrFJpmZWdfKZv4t1ephafu2OLEVPaHWaO0MCrsdWeT5nVf/AEKuh0/943n3U/mn+Bdv3VrldMh/fB4dyOv3F/vLXT6OEaOKa83b2b7q/d/3a9mlGx5tSUuY6TS7ePy0m2SYX5ol27l/75rttL0lIVDzQfP95F/9lrA8O2/l4+95TN92u90Wxm8lJnttz/e2yfeVa9aMuWB51SXLL4jR0HRofs6BIdu5NzN/drqNL8O7oY32bUb5UaodHs/Ot1mmtW2RtsRY/wCKujhh+VExho33bmX5v+BU5e8cHtvf94zTpP2fe9m8OPKZdzfxVmaho9tGPtSIu1f4fvV1lxFDHjft/eJuST+GsHXLdJIW8lNyxy7mWFtv3v4q5qkf5TWMjgvElj51zs+zM4VF+9/erhPEFq8jfcw8jsjbvlaNq9K8RWs1rJL+5+dXVnbd/DXE+KbV5pHh3szSJu27K5KkeY7KdTmPMtYsZpVljdFRo/k/2f8AvquJ8QaT8rJM/mov32/hr0zW7OG3m2b/AJ2RmZW/u1xHia1+0M/nTNsVNjL/AMs2X+8rVxVKZ2U582p5v4i0+2mt3RLbDr9z+Fq4DxNZ3yyJ/q8/xrv/APHq9P1i1eSdHh+YL8kUjV534ou386a5ddhk+VFjX/x6uSVPlOunW7nA6o0ylk8lt8aN81ZscsM0mxPuM+19y/MzVq6tHMt9Md/y7NyNWHJIm7Y42H7zLv8Au1hyxOzm5tIkrXf2VsoMov8ADsqlcTG3b98m5ZP4anaZGU+T/F9zd96q9xcbW+R1I27WZV+b/drWMeb3iZSj9oiMkMm5E6/dVViqPzizSpM6jb91Y/ur/wDZUrSPGrO8O2X+9v2/LVdpIdzfPv2/7FXy8pzc0Ze6WRJC2zzplf8AhbzFrRtWDQu+xQWVdm2sqxXy9ieT8n3trfNuq5Gybi6bdjJ91f4aipHqbUeeO5uae3lzFJk2tt/iTdtrrNDk8mOLf5Zfb97/AOxritPuv9I2SOrfL8+7+KtjTdSkVfMm2p83/jtc8o8p2xl9k9T8N3kMcbPNMuPu/L8rf7NdRot5MtqLb5VO355F+7Xmvh/VkCo+/fHH/qvMf71dPpevPI6Inlptf5938VVR90KkjtY5kh2PDCrlV2ytGnzL/eq7BKzab5u3adjHAHTrXNLqCSRIjzM0i/N8rfKv/Aa39Om8zQxNKCP3Tbv1r9u8FnfOMf8A9g1T/wBKge7wvKMsXWt/z7l+aOVulhWQ/Y0Uru3bvutWJq0m5nhSbcv95v4q19WmhZUf7SybflVttZF4okj3oV/d/Kqs33q/KoysfB1InP30n2e8TyfkZv733ayppIbiR0eFVDPuZf71bGuKlw7onKKu6KSNN3/Aawry3TzA6W2z+Hdu/vV2xlGRxy934jJ1eJPOZ/M/vbq57VG+/wCZwPK+7t/irodQhSFpk+V/n+9XN3yzSRzP8u9m+ZVrKUvcKp83OYOoqjRrMg3t/Dt/u1QRFaP5E+Vv4mq7cRwsrQzQsu3/AGtqrVK9aGNQkbqqL8u3+GuCt/Kjup8nOPtf3Mm5/wC/tX/arTt714Y/73zfN/s1kNIkduknQL/D/dqSO68uQ735/wBlK82pThserh6h1Gm6lCyb/Obb/data31CGaHY02U3/ulj+VmrkrG8TaqTfIf9/wC9Vyz1HzpvOm+T+GKvNqYePQ9jD4iXwnUrIfJeRJlyqbH8ylW68tQlyilmT/SFWsKTVpvnfzsbfufxVOkzt86fLuT7zfe3VzSp8p0xrc0uUtXN0mF82HC7/k2/w1FNLeSS7IYVwqMvzOq7v+A0xZvmRPtSs/3tv8NR+TdSM291+b5kVfutUcsfiOiNSXwxM7VIQyrM6MpZ/wDe2/7NYeoafCrfO+FrpLi3eP8A5ed396sqe3Rpmh8ldsny7mrqp+7A563J9o5u+snjU79q7fu1n3Fqkn91j/eat28jtmVnR2Yfd/4FVBrEyTP/AH9v8SfLXpYfmlqeTiDGmsYXDbnZtvy1nXVq43b/ALq/d3V0U1n5cf3Gb/d/irS0P4X+IfF2oW1tpumzP9o/1SrFur0KfkeLiPdicJDod5qF8LazhkZ5H2osabq+rf2Bf+CW/wAWv2vvG0Og6bYSQ2ULq2pak1qzeTH9792v8Un+zX03/wAE3P8AgjzefFjxVpU3jOwupHaf9/b+Q0EUK/e3SSN/eX+7X7b/AA5/Z58GfCfQU+GPwQsNL8KadDYLZJdabb/6Szf8tJt395v71dNTFRpw0PErSnUl/dPze+B//BJ34D/B3VLZNY8NX2o6xDOqabot1YfabmZl+80kcfyx/wDAq+uLXwD4k+GetSX7+NrHwfdw6WsVloui6XDJdLGq7lVY41ZlZmr1T4qeF4f2bvBaW3gDWLfQra+vP+Ko8d65ceZcxx/xLBu+ZpGrxyL9v/4V6D4T8SQ/s2eEJ38QWUTLB4u8S6Zu+0bfvTbfvMtcVTFc0uVl08Py+8jl/CvxQT4P3WpeNvj98PLzVZdS+bTdS8cXq2zyNu+6sP3m/wC+a7vwX/wU0/4J56L4LW21o6amszMy3Gm6Ho0ki28i/wALSV8ReLfhh8Vv2n/G0Xj74reONQ8Q6je27NPqk1vJtjjZvlWGNflVf92qmufsSv8ABbxlpGt23wc8VeKtLjt1nnt5L/7D9quN33d393/0KudwqSl7j5TROlT3PsDxR/wUN+BV3rNr4nufiF4JfTVLQweHb7SVRo23fK0tzKvzVwvxS+O3iTXJpofCvjnwjqOkattli03Q2WRbfd/CzLXjPxA8Fp8XPDb+FdY/Y80Hw3bSSx7bq68Q/afL/wBn7v3q1/Cv7GPxI8K/Dyz13QYfBdtZ2M7eba6PK3m+X/DuasvelFe8TKMPiZufDHRf2jtH1j/hLbbwTp99Asv+i3FrKrK393crfxV3mg/Ej4naa9zqvxX/AGY9U8R2l15jT6hH5byeX/eVV+XateP6X+0NrHw/aXwr4z1WPFvLuijtZdyrtr3X4A/tufBzXri2sIdVvEC/8fkMkXlrWftlEJUZSjFxPMvit/wT1/YA/buhv5ktLjwl4kvLNks75bVoJ7ebb8vmf8Cr8yPj9/wSv/a3/Zn8ZXPhXVfhvJ4q0ppW/s7xBp8EjR3EK/ekZtvy1+6/iz4mfsr/ABC1pPCuj+MNF0zXI3826Zv3DR/wruk+6zLXZ/Dv4Y/Ejwr4fubzQPj9Z+IIfK22FveIsvmL/d+b5dtdUcTGpG03dDo1q+Hn7p/Mp44+Bz6LpqarZ21xb3McrRXum3jqrx7V+8q/e21wEdnDG3yOr1/Rn+3N+x78Fvjx4Nurz4i/CjSdD8QzQMsHibQUji3Mq/dZV+81fjH+2N+xzpvwR157/wAH+JI9StI7PzZbdl2zxt/FuVayrU6Uo80GfQZfnHNPkmfOTWfQI64X7+1fmpY7WRVkDo3zNt/3qteWkjLsttv8T7qmhs3j2zfKSv8ADXm/D7p7/N7Qz5I3WMJ5PzN/eWq7Wf7nZ5C5V/vba12jmRRNH93fVC+V45nm2b93+d1bRjORn7SEdjEvI3be7w/d/i3ferH1BflE3ksvybdtb2oRpIvlx8Lv27t1YeoRzRspPI/3q6acffOKtWnuc5ffvH8x3xt+Xb/FWJfrM0iIUXDbvu/w1t30b7t6f99VhX3neWybNy/3a9GnE8utWl9oo3XkhTx/wKqUknzEbPm/2at3SptG9/vJ92qsm+OT5ErrjE45S94rsu1N3zUx442j2fxbvu0+TzG+R9zfxbf7tPhjk/5ada0jEjmLenr5siu833f7tfan/BL2MR6H4wAXH+k2X/oM1fGFjGke3Yn/AH1X2f8A8EvUddC8YGRcMbixzzn+Gav0fwijbj/CelT/ANNzPpOEv+Sgpf8Ab3/pLPKPjc+z47+K5NuNviC65X/roadoMkM0ImCNv3fI3+z/ALVP+NpT/hePiuIY51+6LY6/6w1DoMe2MeTwdy7Wb5q+Hz73s8xX/Xyf/pTPEx/u46r/AIpfmzq9BRFuPJTa25l+9/DXTWMcefJSbhpfk+SuY0dnmZnMyn5vu10+m/6QphSFt2/5If7teRzcupwyidDptvDIqOj7v92tayhmeYfdCRszRRr/ABf71Y+lw4kG+Zl2/NtrXsZPvTb2f5dyfL81Rzcxlzfyl+3tUjbz53+Zm/h+b5aurcCNt/X5F2R7flqrb3ULqY9jH/ZWnyyfZWMaooRvmdt9aD6+8N1C8/1yTIqbovvL/wCg7ayLwQx26eTNIdvy+d/EzVYvE2OJtm7cnzrWczXO7zo/LVvu+Wr/ADUS/lHTiNuLl5GeadMt95/7tRzXTxKr+fu+fai/e2tVLVmk+5DeqybFaVV/h/2apSTJ5O/exH3V+eplKEj28HGEf8RqXWoIzDztsyxy/wBz7zVm+Yka4uZl3M/yNs/hqtJcQ3GLYPtCy7trVJ9udrZnuU+Rn2ouyuGX90+zy+p0ZT1DZJJ5yPgbvnk/2f7rVzeuRxyKqIjbFb/gVa2qXSNal0mZEb726sDWL54wy9V/jasYxme9Tl9mRzEl5tdk8liP4V31UluUjb765/ip0mxZCkM2dv39v96q19JjCfw7fvbanmjzH5p7OXQeuoJGyzfMxWrtvqSSKqPMu+sZrqHzBI77FX+FaFXdMskLyDb83yv96sqlOlJm8Y8x0a6o7YQq2W/u/NWvZ6gm1N77Gbarr/8AY1yFvK63Su7sn8S7WrZt7iaKRftib2+75lcVbAwlLmideHqezmdfb6skMivM/lbfl+X5t1bmn6h5irNHefN8q/8AAa4rT7hJJm+RnX/lk1btnMdyP/ef/d2rXP8AU4R2+I76eJ/mOqsZEVTNNCxMku1Gb7vy1qWdw6sn8O75t33tq/xVzenLNJG6Q3P3pflkX7tb+myTbET+HbtdVWuzD049TT2kuX3S/HIkLK8ULHc23zI//ZqsyWsjRs/kqHX5mkX+7UViwVTN8u3+6z1PMs0cjum77v8AE/y7a9zDx5TgnUluyvdK8cg2Ovy/M+6qlxcJbwvczfuk/ikb7tF1cZha5meNXjZkRY/vVk3V1jKTTbU+7tavUiebUl73vEclwJN7+cz+Z/49VLbMzPzHlvlSht6L+5eP/eX+7TjLbNjY+1v71ay5eUUZAFh8tNj7P4dzfdZqr6hDDGyb3VWZNz7XqPbBJIyeT8zP86s//j1WZLe2uPnG1/L+Xd/drya3xHpUKkpR1Kcbor7N/wDubfu09Y7aORPn2My/6tnpsKp5ypsZh/B8v3qWbY0hTZlP7q14OIj7/unt4ep7t+UtW7P9l2IMfe83c/zNVvyfLWJ4fM+7tZf4f++qqW8GNiPbM3y7dy1qxwpJcLbfMm2Jvvf+g15laUeU9OlL+YS32Kyvvb73ysr1OLdFk/fXTFV+9I38VOt18uP/AEnzPl/8epwh+zKHd1P8P3P4a5+aP2RylEnaORbdUttyP8rPJ/C22rcMiMQk6KG37naP7rLUFjDNNEmP9T95d38NWo40Me93YN935V+Vqly5jjk5RjsamnqGZ5ndtm9XX+7u/vVr2NzNNIzudvl/Lu2VjW7JG0MUCYf+7v8AvLWxDceZI8KfMzfdbd8y1MnPm2FH3Y3LscyTR/ang2iP5f8Ae/3agkj+wWZhvH3D7yeWm35f7tXY1SNSiTSJtlVvLk/hqpcLunMM0kjD73zPURlze6Ty+01CaRFjDpNsCrvdf4t1Z+qTQyMiQJsTb8zQr826pN0LebNs3Ju2rtqpcWciqfJ3NIy7V8v7rV04WPLLmMa/vU+WJRvtlyv2lnUqu3ezVUuoZnWSZNv91/4vlrTaOZVa2hRQ6xbv3n3W3fxVFNbzW6k+cp8z5flr38PzS1keHiI8srGM1vDIokdF2/3d9U5LWHyX2Js+fdu/hate4hSdfO/i/vf3dtZ95dfaIVhtvn8v5mVlr0InDUo80TOW18tok8n5pP8AgS0tqsMkm+F1YbtnmN8vl0rKnmM6PhW+X/gVRQTPuELlVbdudmrf7BzSp8upamt4FXyUdju/8epPsaeWjpNu/wBlqjhkmjuPJ2Z2/MrMnyt/s1YsVdkaGTblvuVjUjLkKo+7KzHNYpcQlPJ2r95Vqhdw/wDLbeu/+8zVqws8MZePlGfb81UbqNFYQfNmvN5pRm7ndy/CZkmn3KIj71/iXa3zMv8AtVDcaem7yfuq38LVsW9u/mL5ybfm+6q7t1PFm8jv+5Uxx/KvyfLtqftWNZR93mMSPQ9yhLby9m5m2yfw/wC7WlpugwrKqB8ldrRfJ8zVqLYorb3T/XL8m5d3l1o2th5ezZC38K7a6o80djy8RHmK2l6G9ri6mRnb7y7fl2tWxo+kos377cvmff8Ak+7Uum6em4pDB867m+Zvl21sabZpIYt8LMi/Lt3r83+9XpUfdPHrR5dy9pFlbNMkyJG6R/Lu/h212/h+2RY1e3+VW+b5fm21j6bYwx7UtvnhWJfm2bvm/u12Hh+xtvNheD5Qy/N/tV6cfgPMrS/vHUaGs3mKZkZ1835N1drotvDFGYUhZX2f73y1zfh1UjkhhebazN8i/e/76/u13On26QTf8fMm6aLb5irurXlOOUpbFyz0uCOP7NCkbSbV3yfxba0tvmW6TeSrN5Wx9y/L/vf71Mt7W23D7339u5fl3LV64hSO3Z0fIX5fLq/dkTGpKOrkc9JBNMjukWH3fJu/u/xM1Z91paLJK6QsRvXdt+6tdHLY+cuxEb7m5vmqnNbwL++N4ybk3P8A8CqfhHTlzT1OU1TTIZn/AOPbLKm3cz/K1Zl7pqRw7Ld1RJF2/f8Au/71dRJY+cyw9E+b5m/ib+9WLqkM1ufOhfYNjfd/h/2mrKW5106fvcxyOpWf775/LZl++2zav+ztrCvtPDbtiK0zf3fl3V1us7JrdPMhjTzN2yTZWDqFpuVkmh2fL96OX/x6uKodtPc5XVLMNl0TL7W+X/arCvLWGORUTa3l/Nt/2tv/AI7XXalb2DRvD58yFU3K0fy/N/drC1iz25d9qSfefdXnVNzvoylE5uaFI5vO+VGb5trS7qVrBHUpv81YUVt38S1eutPS4vI9/Kr9zau2oGi+xvsfzNzfLtX+7/vVivdj7x3RlIns2SMtbQ2ysrfwr8qr/eardiYWmZ3kbf5W6Blb5ttZbXn2GRX2KwZ9qbt33aYusKzI72zY+4v+7XbhvhIqVDs9JuEjmSF3k3tL8qr/AHa6zQ44bi4WFE/d7fk/2Wrz7RbmFm2Qvvdovvbtvy12fhXUnlX98m0bdu1fvV6tGXLE8+p7x6jocfkrs+0/8stu5a7nRW3QxzTop3JuTzP4W/2q838I6hbeWpmhZm8rZtZtu6u30fVHmh+0u7b2dd25PmavSp8so8p5dc9K0G6na1ieb91LHudJFb5a6K1unvIzNJ8/7pmeRa4Kw1izjs47VH2NIzNu3/w1vaXrkMduAjrjytqbmrSMuh50v7p0MMjr++WaNl+/tb+7/u1jax9muN6GFn/ifb/DuqX+1E+zpNbTKjeUyuv95f8AarI1K8QxtCk23d9xVqOX+Ur2nLEwvEjQ2rPs8xV3fd835vu1xeqSp9sTf5n3W+ZU+7XVas1y29YfL3/x+d/d/vLXMa03yuA6hFX51b+Lb/FXNUidNGRxWvbN7O8MiJv2rJ/E26uI1yzWS3ltnfIb+Fv71d34keGaGTY/zLFuWRmridaaG4k87Zgtt/1f3a45RPRjU5Tz/wARJ5cJhd23/fXy/mVa878YWaMx3IpVvlSvR/Elvf8A2hoYUWPdLv8AMZ/4dv3a4bxVDNJCzpbRp839/wDirlqU/tHTTkeZeIPPSZYd7M/8arXK6g0zXDPs2O39567XxBAkUbzJbMjx/wDLRX+7XF3ypNJiab5m2/NsrilGX8p2U5fCNW6RpGe6ufm27dv+f4qivGSRhIjsEX5t396mtj5tiZ2/Lu2feqNleSHZHwq/dVUqI+7sVL3pkd1N5jJ5iblZ9u7+7T22RyMET5Pm81W/u/7NRLDu+dPn/wB3+Kp1W53NMnyqz7l3PXRzmEf5RLeR/kdIW3Mn3VWtJbNG3Q/Zl+aL/e3VDD+8k3zblbfuWRavWqpFbibZub723dtrCpzHXRjEfDazyQ7HdU8z5av2K/YQ0Gzeypt3Mv8ADUVn8rfu0ZQvLsvzVoqqLcBPO+8isit91mrklI9CNPmjzF7Sb7yykKWzfdbZu/hrotL1KGHH77cWiVkZf71c3DJ9lZN77ZG+barfd/vVb0+5T7Qu99u75katqMo82hjU5up2tjq1t5SoHXLffuP9qvQNHlQ+DVlAOPsrnBOfWvHrWaZpGm8/a8ny/f8Al/75r1jw3dK/w6S63BgLOUkk4zjd/hX7b4Ku+cY9/wDUNU/9KgfQcLJLF11/07f5o5yZoZpC7zZj+9BJ/F/ustZmqTIszIi79v8AzzpYbyaTfvRn/ufLtqreeTaqzusnnM25fm2qv+y1fkMa3KfFSjzGfqk2632Wbsg2Y2/d2/7Nc1qz3McjwPJ95F3svzLu/wB6tm+kubjfO7xh2Tb8yfdasLVPmY2czqv3vvfLW/teUw9nzGRfXSQzOny7WTanz1z2rXjpI/2Z9q7fvL/erV1pYY2R0OxWb7y/NXP30bm3b7w2v8+3+Gp9pGQo0yjqF5uXYiNn+Pd96s2aTzNkJ243fxf3qkummkb53/g+bclZsmoeX8j7VH97+81ZSkbRLrSW3k7872b5drf3lomm/c7JplG3bs2vWZ9ukmUwzPs+b5f+BUn2ny2/hAj/AIWrjlT9/wB07o1Pd5Tfjut0zOiYdvvf7tWrNv3ZfeuN/wDF/DWDa6h8wd593zfNV6x1J49yJIqLu3J8v3qwrUZnZRre7qbiyOuI3flU/h/irRhk+0Rs7v8ALt27VrFtdReS3b98rN92r8d1C0I2XPyx/M6t/erlqQud9OX8pfhhh2qjpvaR9qKv3v8AgVWFuEk2fJsf+JW/5Z1TtdQmuFZEdkRv4lqz/pMiqg2uVbbXNKEubU6Y1OWPukM0fnXB/wBJ4/grI1NUaTy5kYhfuba0rrzdwT7Nna3zqrfdqrqtu6xr5L42/cVXrWnHl5UZy97Uy/s++TEiMit/DI/8VQR2X2hmhm4H+/VqSHzP3Lzcr83+1XQeBfhzrHiq8httHs2keSVV2+Vu+9/s130Y++ebiJcsRnw7+HP/AAk2qW9nN8jSSr5W5GbdX6r/ALAP7FfhvR9M0258N+D7W/1mS9VpZr6DzWX5f4Y/4a8s/YO/Zb0Twt4403Ur/Spr+6sd32qRbVWgjk/u/wC01fpF+zLq9/8ADG6u9A+Ffw6vLvxDql1591qmqOq21nDu/vf8tJNv3VWtqlbl2PnMRW5pcp9P/A3wjeeGPBdonjbTbW11Lb5UW23WPc3+yq0z4wfHr4K/APQP7d+Kniy3WWF/3Vjbxb5ZpP4VWNf4qu+Cl+Ilno9ze3lra3N66eYt9qMu1Wkb+H/ZVa+WP2l/2fbzxRHqU/xR8f2d4983mWtjodvJuXa3zNu/hVf71c060tLbGHLA4P8Aa9/bJ8WftB+HrTTPhJ8N43fULryIrrUl+2XNiu370UC/u45P9pvu1o/smf8ABOvWdU8Pvr3xU+NE1jLcKq3unyWSyysv/XRvl+b/AGa6D9kv4K+EvC/iaDw74M0qaGwtV8/7VcXDSXNxM33tv8NfaPhzwNBpmmtiHyJZFz9ocKzL/wB9VtSlzRugb5jz7XPB+i/Bf4Yp4P8ABnhiN20+3Vl1jULWPy1+b+KvnH4pal4t8YFL+GGPVnkTdtW82qu3+7XvnxnuPAei6bcN4y+IcmuyzTsn9mteeXHuVflVlX73+7Xw7+0d4os7G+stYm8SeHYXum2RW9jebHjX/a+b+7WVStKUiPZ83xHNfFS4/wCEHszrfiHwlfW33pfsduvmt/vKq1leHf2nPhj4quH8PaJ4km0p2dVnsbiJkkZv4lrmr79u7XvhrJPoPwr8H6TtuItqXXiK3a7kbavzNury7w78PfFHx41C51i88f8A9ircXrTy28ekrBA0jfeZZPvbaw5pz1pm0eXlsz0T46/st/DG5kl8beH/ABDeTeJLza0unxt+6aP+6zf3qf8Asl26fC/4pQp4h/Z5mn06SVWutS1C/wB7fL/Esar/AOO1hfD/AOFfhfwz44t/D1/8XZrm8t4t25d3kKv+1u/i/wBqtj4mTePPB+uR674J8eeKLm2hZV+0aT4f/dqv+y3/AC0/3quUqjjZmXL714nrnj/UPFXxd8a3Gpab+zxo9vYrdLcRah4ksNsce3+FYl/vf7VdKv7ZHxD+Atj/AGl4wv8AwHrEUd1t/sfT5drRq3/LNY1+7Wf8OP8AgpRo/wAMdJ0rTfiF8N/E2uWrSr9q1LVLWGJW+Xb91l3Uz4hfBH9hX9uDxR/wmH7Nl/caV4ptf3uraTpM7LFqTfxRsrfLu/2v4ayk4zhyS91mnLKnLmR2d9/wUg/Z4+NkNt4D+IXw9k0F7qLfFeQ3Xybv9la+Y/23f2Xfh78RtJvfij8Mdet9SNnp0y7bf5XmXb92T+9838Va/ij9nn4P+D9Qm8PfFT4o+D/CeuW8uyLw6uvfa7qNf4d237rf7NRaL8L/ABV4bhuNSfXpNX0e+umVLqFNqqq/dXb/ALtRGUqPu812TKXN76Vj8j9b0+5tdSlttSh+zur7XhVf9W392o2t0+WFLncF/hr9NPi1/wAEi7P4zatL4z+HXi2ztZ7z/j4sWfayt97dt2/3a+O/2gv2I/H/AMB7iayvEjuQrM3mQy7m+X/0Kt/q8pQ50fQ4LNqE4xhI8Kkt3WHf0ZXasu+hkZPv4Pyt/ercuLVPM8mZ2H+7/erP1KNFh2WzqR/Ezf3qxpy5fcketKMJe9E53VFTy3TP+18vy1gapG8m596+V/Atb19+93o521jahG8au7lWZt3yr/dr0KfNLlPMrS5fhOY1BWZPuMv8SstYt8sMWUfdub+L+7XR6hH9qlKD5X/u/wB2sC9jTa298n+9XfT0908mpKXMY0ypDJsHztJ8v+zVORC0jJ53zbN1Wrr9yzP94VCkfy70fI/j3V083vGBBDvXG87t33mqaFAGXYn3qTydzbEdf9mpLdXVs9dr/eqvhI5mXNPX5mR/7ny19nf8EwiDoPi8j/n5ssj0+WavjS0jhVdj7sr/ABV9lf8ABMJy+heLywwftNln/vmav0jwi/5L/CelT/03M+o4R/5H9L/t7/0lnlPxqm2/HjxYgAI/4SC43Fu37w1V0uTbcKLaHd/tN/DUnxwM3/C+PFyxy5J1y6wPT94aq6TJtjXDsD/Btr4jiD/ke4r/AK+T/wDSmeLj+b69V/xS/NnX6XI+77jKG+Xd/C1dRpMiNAsNy+8fwfNt21xGl3otmVzN8rJtZfvV0Ol3iTQq0MKtKr/eryJR93U4ZbnaafcFl5fYq/c2vWzp9518lF837y/3Wrj7PUXVlebam7/nn92tjTdShEwRLpf95vustBHKblrM6zRTu7THZs8vbtqx501xIXwu6P5n8xPlb/gNYq6tNHCkKIx2/wC3t8ula+S5kXyNu1vl3K27bTlLsXysu6tqCKuzzGB2bt38NYl7qE0aF4uFkbbuj/hqO8vnWPMz7l2bvlesi91R5G3um7b9xd9Z+05vhHEnurxoRs6+Y/z7vl2rWa2oIJFSFOfvJt+7WfeXSSKdh2j+Pc3/AKDWfLceRCH+0ttVfvfeqZfCejhZe9zG22oJC/yQsN27duXd8tQXGsPGuyP51VPn/utWW+pIyrCkzYVNqtUclw6rJCjZC/3Xrml70rH0uHrSly2JtQvnuI2DxxrE38NY+pXaKzpsykiL8u+lurxJIWR/u/8AfO2snUdS2ln+XC/L8tH2j3I1pfFIoMzu29E+6m1lqCZpmXY+3K/3f7tLIz7iUC/e/iqG437sf+PVjKPQ+Zo4eRXjj86d/wD2WrNqrzKrom0/x/7VR6e0KrvRGG19u6rdnG8bbE3ZZ/vVhKXKd8cCWLNUkjR0TL/d/wBmtS3t0ZPOh3b/AO9I9U7dJDIu9Mt/srWtart3p8zsv92ueUhfVZFvSvtLfvkTYN3yblrZsbc253o7fKnybm+9VCztv3ZmfawZdv8Au1qWtv8AMv2NPNVV+bzGrH4iOWMY25TV0i6dW/cxsQ3yvu+6v+zXSaPHHMrB/vr/ABVzel3k1um/7MsiMm52b/x2t7S7qJd6OrK2xW+V/vV1UY+9flMuaMYG7BdQ/wCuuYW/hVWV/mZv71STTeXZuQnKu21l/u1kWMgl3u6NsaX/AFn3fm/2almu3Zvs0L5C/wAOyvWo6e8c1Sp1KOoTXjR/P825P9W3y/NWPOs7Mfk8xf7y1q6lHNJK7xuyMvzbf71ULqNPuImVb+KvSjUt7zOeUoy0KCw+Yjp8zjf977u6o185MfZiy7U+ZfvVaa1eFg7n5WX71VfL8uRPs275vuf7VOUoS0OaMeUVWRspDtVu22nRyQtiH7yt9/b/ABU5bV1kYvDj+Ld95adFYvDGvz7WZvk2xfLXBWlCR208RykM0O3/AFL7Ds27mepoYXaPfC+x/wD0L+9UsdnayY2PJIV+5tT5as2tqkatCqMzs3yf/E7a8HES5T3MLU5o3Qun2MMa/aUtlXd8zzbvvVdt7V5v9d5mfl2L/Dtq0umTRwtDDDG3yfdX7q1aj0lGVUudwdvmZV/hrxqkuadz14/BYq/Z3X7m5N3+tVqfHD5jb3/3h/dWr32JFjeZJvNdf4W/hp32GFs/Iz7otzbfl21EuSWhfMQQwuqpNc8NJ/qt38NWYY0kxOm5dr7dzfdp9rYzSRlHh3xr9zan3attH5MZhhtmdVX72373/AqqnGUpcqOSpUjGPvCWbTPOqTeXnzW/eMn8Natr50kPkvtz/wA9FTbWfG0Jh+SHcrJu+ZGVlq9pk0jTffYxL9xWb5q19n7vKc6rf3jTYXL4hublQN6tuZdzNtWoNSkP33/esv3WjanKv7z/AEOFmO6okt0VvJdG+XdURo/DGJp7b3blK5mhjmREf5tvz/J/47Uas8a7Eutm1G/d/wB6p76N3t1T5mib+FX+as2TY28Ju/eLt2yV3UaP90yqVJdCyGto7OKb77Rtu3SP/wCOrVaSb7Ysbwjb97bUULO2xJ3WIR/cj/utTftCthEmkfc+3dIm2vWpx+yefKPtPeIL7eqvC9su6P8Ai31kXCwlPJ+YO332rS1CNPM3v8u1d21WrI1KYSK7p8iq+12V67IxMpUylNJMsyRnyz+9b5m/i2/3aa9x5jK+zYG/8dptwqHe77lDfKsjN97/AHabCsNwy2021gq7ttacsTllHl90s6XsYMjyL5sku7ar/wANaDLCsmyENlfvsy1ShVIdjujMy/c8ur9vlo3d02tu3IrVjUkZez94fZs/+0W2srKyf+PU+ON5pPOd/kb5dv8AtVHn7KzjfJ++2/x1chVJlLxjZu+Xcqfdry8RI7KcZdCKxsfJkeb+98yL97bV+yt3uJvJhmYts37VSoYYXVRCjthV+eSRPvf7VXIZlhxD5ys23a21az9/4hyl/KQrbo67N/Kvu+WrMaQ27ffk+Xb838TVHJcQqwTzGJ2feVKRri22p+5kLr825d1ddOPMeZX/AHnMy9atDHGZt+6P+P8AvVs6fNZtG3nWef8ApoyfdX+GsGzkc3n2b5odybt2z5Wrc0uZFZXkO3a+395/E392vWoRueJW5onY6KqLDA7zNsZPu7du5a7jw7HD5MUycfdZGX5dtcDolx9lWPfDtWP5k+b5t1dj4bvEkhQJZ7mZ/uxtXqU480bnjYjl5jvtEukjKI8yyuzt+7j/AIv96uw02TdYq/ygbVb723/vmuC0O6+0YmQMzfdVfu7a6zT77y2+eZXEaruVl3fNWhzfEdla3VzMq73Xy9m/b/EtXproLMXR1Kr/AOPVh2OpPDuS2udn2j/XtJF8rf7tW4byBgyJMoiVWbdJ8tTzFRo9CzI3kyfJD/Budd9Zt80Mjec6cf3W/hqaS6tm33MO4LGu7zG/iX+9WbcapbTX0aOi7GRnRl+bdXPKsddPD9yDUm8yPzoYfNGxlVWfbXO6hZpHD5PkwvtTc3zfMv8Au/7Na11cedC+P4XbYrVh3U0CxlE5RflRd/3axqVDqjRlEytQg86P7RNNxvXarL93/gNY2qfLcb5nyyqz7VrbvpH8tvJuViK/f+T7tc1rV1YW6vv5bf8AdV655VOY6Y05dSvdb1K+dCzI33o2T7rf3qx7yGG6UlHZ1Z9u2b+GrGsa88kLzJN8y/LukrmtS8Q+VG8N1Mrhm3Iv8K1yVJc3wnRCPSQXzOuxI3XdGu/cv/xVZGtahbW5l8mZkb+7tqjrXiia3tWe2O5938L/AC1yXiDxg8d0qQvHtVG+Xf8Aeaufm+ydtOUuU27rxAscgebdsX7n+0396qC+IEaTYu53ZvkZq4+68UQs3nJ8jr833/l3VUt/FE8lwD5zKy/3v4q7sPEwrS5j17Rtc+yqr/aY2VV+RfvV3/hDWJpoxEjqs396vEPCfiIbh5M3zb/n+SvR/CuoJtCTXO12Tc7f3a9KlLm+I4an909o0XVraHYj+XCzIrJJ96uz0HXHkaK6e5Ybfk2q/wB7/aryPQb52mhmtplO5Nv+9XcaLqSTR7/s0aFvl3M+2vUhJHnVn05T0bTfEG24W5G0Ddt2t81dLa6k8ca/PGiN92vPdI1CH7KmbmR2VlV/k+8tdPoMnzbJvnDI3zfe2/xVvGUebyOGpGJ1Ed5eNC0LzZ3ffZUp8cN7HEu94X+Xay/7VVbWPdCh+07UVVZ9rK3zVZh2TXHybUZvl/eU+WJEoy90ydajh85EmtlIX+JX+Vq5nxFJ+7W2Ta7bWZ5G/wA/drrdU8wzM7pt2pu2/wAVchrUcMcO3eyp93zPustc1T3TaG5xPiKZLhXdywDRMqx7P/Qa4jVFRVW2e5bY27Yuz7tdv4kaDzD9j2qyvtfdXF+JJLaNltvs+59+5W/iZf71ckpWkejCWhxviq1tri3ZLYs6LFtSTf8AM1cPr1pM1vHNZTZ8ncvzfw13mqLCsmxEaINuXav8X+7XKaxaosO9JmQyP91k+XbXNKJ0U9jzTxBaveQuiOzQs25o64/UtK27/k2D7u1q9R1SxhhD73XMnyoy/wANcl4g0ZGuvLm+fb92T+9Xn1PeO6n/ADHEzWqLGZl/vr/s/LSNC8f+jOkeV+ZW3VsTWLyTb0+6v3l27lZaij0uGWR5nh2/3/8A4muOU/sm/LKWxkR2czM1zN5iL/Bt/ipi2+6bcjs21v8Avmte60/gukMi/P8Ae/2aotaeXMN6Nlpdyt/erb4oaClDl5R1q3kzjZDvVX3eW1Wobh/O+xony7NyR0+1t0WPe8m9v9lf/HasWLwyHzkTcrMyt5iVjU/lOmnzRiT28dy2zyU3KyfearkK+XIIUT5lX52X+FqdZ2sxjML7lC/6pd9W5NNSFVd3Ywsv8X3laoj8Oh1KU+YrsyWKs87tnZ8+5d1XbVbaKaOCZIdq7fm/+Jp0MM6yF3dlZv4l/hpq27qv2abgt83mbfu/3aPi+EJR5SeG4hjk+ROVdtm5/u/7VeweEl8r4UqpPAsZ+T3GX5ryFrf7PNDG+1wyr8395q9d8Ks7fCf5mJIsrkHcMHhnFftfgnJvOcf/ANgtT/0qB9Bwwn9crX/59v8ANHBR6pC1v9pLtvV9z+X8zbahvdRRp5Eh8x1+6qyf+hNVHdPbt5P+r3Ju3L91lqvJqXmQt5Xmb/7v3a/F5Vj5uOH7C3135PzpDHub79YGvSO2+ZJvk27kVv71XbzVvJVnhfHzrurF1jUPtELom5t33FX7tRGtLmuZywsTKvrh2k+fhf42/u1zuqTec/z3Klf7v96tK+utirv+dtn9/wCVWrIvo5mVd+3d952WtI1uaXumX1flmZ2pR7rht6Y/hVmf71ZV5sZvuKo/gZkrQul8zbs2v/d+SqF8r/K8z8L/AA1rGXtCJUyncO6/Ojqyf7S1BJqCbd+9d27/AL5qO8ZNron8Pzbaz5pvLYQvHubq1ax7mMvdmadvqG2TZs2/7Va1jNC0yTbPmXdtWuUjuE/g+Y/x/P8AerR028dWaabhm/i30qkZ/ZNqMpc51kd4jRD73zL8/wAladldvIu/5v8AYrlrW8dlx9p5Vv4q37G+eRdgTKbP93bXBOPNI9ej8Bu2Nx+5SF9ys331X+KtNV3fvN+xv46wtPkSOH/XMzKn8Va6s7bZim9pPv8Az/w1xVI8tU76ceaER+o7/McI/wAzf8tKozQpJh5nUt/Gy1oyR+XGHROVX5/7u2mW9ik2fu/3vm+WrjGPLzGVaPNLlKNjpdzcSeXs2v8Ad3L/AA19HfsX/BPxz428UQab4VsNQlu9Qf7PYWtv96Zv4mZv4Vrz34DfD3SvEXii2tvEnFvJdKl15MW6SNd38P8Aeav1t/Y9+GmlfBfxF4a03wToOzxTq37+1s1iVm0+zZvlaRv4Wb722uylpHmkfOZpWlH3EfQf7Fv7HE3hpbLRfiEjJLawxyfZbG12bW/i3O1fXGpeAdH0icaroWg6VHKu1P342Ksa1bub6Hw9o1os2u6bazKkf2yW7dV3f3q+SP2wNO8YweNTrnhv4reIdYhvnaKLSLCz3QW7MvzL95d1TVqez+D3jx404QXvnu3jJ9burpNP8N+PNLheblo7V/P+X+L5f/Ha+Y/iV+0J4t1rXLzwB4WezsVt7hotSvLho5ZY4938Kru27q8Z1j/htXRdaSGb4PyWMMcSwJqGpaktqs0e75VWOP5q9c+FPwtT4aabL8Zf2h5vD/hXTdPeS6XT4Z1iW8Zf4mZv30zVyzS1lNGnxQjyHrXwQ1fwH8APCr/ET4l6xpelK0TLbzanKz31x/d8iD+L/gK1l/Ff9tr4kaxo93beHvhvNoOix2Uk/wDb3jLUo7F75f4fJi+9t/8AHq8W8eftKab4km1T45eAPAOjldPX7Ra+KvGTyeRGv3VWDzP/AB1Y1r5r8J/C/wCJ37fnx5uvFXxC+Md5r0G7zdUuriLyoreFV/1ca/dgWoVaOIjy/ZNYw5IEXxE/au/aN/aS8ZWHw6+CejR3UC3TJOuk7vIt933ppp/vN/31U3xA+CPhf4a6Dcw2dnpOseIbW183xDrl5KzQW67fmt4F3fNJu/iavqjRdS/Za+Gvhu1/Za+APifw7pVu2lyXvjXxFNdKktjCvzNuk/hXbu+9XwB+1x/wUy+BviLWdc+Fv7LXgxb/AMOaDLJbp4qvIt0epTN8rNHH96Tc3/LRqvD1MNT92GpnKnX+KZm+H7fw34s1h7nWPEP2izsUjW1tbN1T7VNI3lxwx/xN81fQ2h2fwf0HXNU8B+Lfijo+gQ+GdNZ/GV5ay+e1j8u77LD/AAtcMvy/7NfEX7JXhP4nax4/tvjB45SbTfDug+dq95faha+XH5yxt5Kq33du7+Fa89t/Elh4H+0eJ/H/AIwW+k1jV5tRvJrjd5V5IzM3/AqVatyRLp04y1Pr7xN+0xc3nhhrn4G/C6Pwx4Gs5WR/EmtQLJqWqNu+983yqu2qtr8cPj9ps1t42sPiLrmrWkL/APINt5Y/L27flVo1+6teReHf20dB+I11Z6N4nnsYNKhg2263Vv8AuF/7Z1778MdN8T3Ghr4q+A8PhXUWk2xXWnwxL/pTbd23b977tc8cVRnK8jX2M/hien/AT9szxD4+1XT/AAl8WvBmkvZ3Hy+TfWCu8m5tv3tvy19Q+KvhP8OvAfwz1HR/gb9l8I61rE6y+I9U8P8Altc2q/eW1X/nnu/5aba+SP2Vf2tvgtpPxkvfDf7VPwht/DF7oqSOt1b7mit1X7vyt975v/Qa7rwj4hf4f/EzxJ4q+EvxLutc8PeKriS9lutUVd7eZ95W3fd/2a562MdKTUZfeaRwrqbxPN/26Pgbf6potr8QhbWaap4fZU1TyUXzLxZF/dyM22sz4O/EDXtL0uz0TU55prZv3kULP8sfy/xVteMNU8SX2g6rba3qTP8AatyfvpdytGrfKv8AwGvM7q617SfD8iTSQxMq/wCsX+7XFWzLnnHQ7KeWyjTlc+mfhT8dLDTPESWdzZ7HmuN3nLKqqsf8W3+9/wACr3b9oz9iXwL+0F8C7q/1XwBDcOsTXFlq1rdbZV3L/s1+YeqePPFWh61bX9hfw3Lx2qxRRtF8u3duavtX9hX9uLVbJYfDfjy/aIr8zTMjLEqt/Dt/u16VHHOjGM90eVWwvf3T8yv23P2Fde+BMlxrdhqtrcvCypFHbuy7l/4FXyheXyfMiQ43P/49/tV/Qt+2Z+yzoP7SWgzeIfCv2W+tNY01kuI7ODzPssi/N53+zX8/nxu8G6l8OfilrngO8hk83Tb9leSbcrMtemksRHnid2V4ypH91Pc5TUZE3M8219vy/L/FWLqChV8x/My33v8AarTvbibkbNyfd3L/AA1lyrhSmGf+63+zXRT5uU6qkjn9QYKxm8liW+X5W2/LWLfKjN8/Cr81bl4vms6Qp83+9WPfRPJuf73y130pRPNqGPfTfP8Acb+6q1U8vbtd/lXf92rtwvyrlmX/AGarTJD8rp83+9W0eaRzczKskO5h5gbDVZtU8tvk+6v3KZt2bn2Z/wBn+7U0LOXZN9WLl6Fyz+7v35/h+avsj/gmGyPovjBkP/LzZcDp92avjm1jk2qn8K19kf8ABMdI00TxcIhwJ7Ef+OzV+l+Eji+P8I12qf8ApuZ9LwcpLiClf+9/6Szxv44s3/C+fF5EPK6/dbW/7aGqGns6qif886s/H+WcfHbxa0UmB/wkF0u3b/00NZGn3yXGCm4fJ/FXxHEH/I8xX/Xyf/pTPHx+uOq/4pfmzrtLkdoVd3+Va27W8+yyfu3/AN+uUsZH2BEfaF+9/tVs2N07ZhdFcf71eNLm2OWXwnV6XdQqvCfIy7d2+tKG8fzB5Kb1ZPlVv4a5iGT91shdV3Vdt2vFhCb9rf8Ajy1XwmXxHTR61CsZs3hZ/wC/8+1agm1SGNnbyWwq/dX5lrIa48vZ94nbtdart+5ZpoXkBVPu/wB6iMfcHzGhdX22AQ71+6v3k3VlaheOtw6QzRpudmVf4abdXTy/vn3bvvI396su4kmVnhmdWXZ/49RGMio7heTTrGqPc7T/ALPzVUa7dWaZPnLbqb5kM0n+sbCoy/8AAqptM+0JBN838W2lKJ00+5JJM8a+S7/e/u0yS4RZhGjt9z5t1R3E3mbXeZS/8H96qF9Ik3yb9yt/drnlHlPWwuI5eWJZuLh4V2O6urfMm6su8uklk2O6pu/i/houpkUh9i7l/h31VuJvMjZHRVC/3fu1j73xHvwxEZadi5Nbo3+rT5qrbXmZU2ba0riPy/n8n738K1Tkh2x+ciYdfmTdXHKXuHoUcKRLC+fkTcf7q1YXzpY/v4Zf4lpLdUKs7zbdv91alt4/l+Tayqm/a3y1zSly7Hs4fB80S3Z2z3A2I8ibvmrX0+ZNrQyblDPs3f3ao2qutuod1X5PurV2zhhkhXem3/Zaufmi37xljMHyrSJqaeP9IML7WRfm8tW+9W1DJbKqzJbbX+6/92sfTVmhjCTOvzVoWbIkj/JsXZ8m35qrlifNzjOmX7KZJJDbGHZu/wCea1q2N15WbaRlVN21Gk+8tYcM/wBnZ/ulf4drfNVyO3+Xfv2fP/e/irpo6SvI4pbnR299t/chN/ly/djqW6vNqy3ifJt/hj+ZvmrLsYX2k+czbf7v8VW7dnbdsRvlf72+vUo8nKcMoz+0RXM1tIrWzOz/AD/7rVRvgkn+pHzbtyRr8q1oXFucfaHTc0b7kVfm8yodQt3muEfYqrvX5VrsjU9y5lKMpFLznY5k2o3+9/FRDZodsiPs2/Kq1O1vtma58lnDfNupLO2SH9y77X+8rUpS7mPxTJJIXjZYZm2FkXZtp7W/lje6+Vu+XbJ/ep63DzBt6Nt/8eq59nSRU/fLcMyb9rP93/ergxFblOmjHmKMNrhgltJ5X+0q1oaesKqXv3+dn27v9qkjtXa8TyUZj/Gqv8talrazKx3zcyP+6XbXzmIqTlLlPoMHT5YXJLOxZVR32vKz79s1XLhZl3P5Kuy/c8v+GkjtrlVhh87zNv3/AJfu1dsrW8Wz+fn+8u3btrglKX2T1Kclze8UIYX8wu9srq3DU6OFIz51yW3fdVf4anhhMU3k23Lsm5FZ6uRab51u+xPKRn3Nu+83+7V0qcakia1b2cNSnZx3MkiTO6rF91l/iWrccKXLNCkOxlZvmVfvf71XrO1MkgeF1CRrtlWRPmarENvNubY8bLs/ufMtelTw84zseXWxEOTmMy4t7mG3CImGj+/u+ZdtWdPtfOVEfllbc+1NrVpLaz/Pv3bWVfKbZ8tW7bR3um8+2sPNaZP3sm/bXU8L/Mcf1rrEz1t7lmlS2dY0WXft3/Kq1Yj02/aPi2Zoo3+Rv9nburetdGe7tfscPG2Jdv8Ae/3a118NzW9uiJDgMv3mTcy10rCx3UTP61zfEcBdabNMr7E+WP5Xj+4y/wDxVZF9oqTXSzpCoZom/dt/DXp83hu2b906R/KnzeX96sy80FJC7JCqhXX5m+X71bxw5vTrcsOWR5y2mzMy/aYY0K/N5i/NUUmkvdeTIj4ffvZV/vV1114fvGjZJoMxfNvWP7zVD/YvlKHeFT8m1Y2rojT5ZaGsbSicRq2nu6+Xv4+6396sa6861j3wwr8r/vVau11bRbmS4T7Sm35Pmkj/AIa53Ure2aR4Zk3Dcv3l+ZmrTl5hfDexzl5LDueb7m3/AJZ/e21TC2yzM803yfxsr/d+WtXWrBLWMu8yjdKq/L95qw5LidmNtZpjd8yNs3Lt/ipc3MYVI8xorsaYIjsFZdrtG3yrU00z2tqyfaWX5v3W5d1ZNjdTmRfnUnd86/3quLI6xs/ktuZvvbvu/wCzWEo9zm92MS3JebVjmdFEv3X/ANr/AOJq/b6xNCws0ucSL/D/AHv+BVhPqW7Y7puXfuZVT7v+zVmG8haNnRG+V9u3+Fa86pTjz6mkanWJuyXm23DzTfPJF97722j+0ZvLO9F3/wDPNX/9mrMa68pfLhTMSov3vm2rSLeTzSM6IrtJ99v4ainGZMpcppfbXklGdvy7t7L/AOg1oafNuhW5eb5f9p6xLG68xCmFT/gf3WrR0+JJvK+7v2ttX/ar0KK/vHl1pcpu2quskkl48ez5dm3/AHau6XG/nM7w5C/J833Y/wDarGt5vLjCefnd9+P+Ld/erZtd8yGZ5mf51X5U27q9bDxPHxEoy3Oo03YzJHv+ZvlTd8tdXo9wlrIiQzf6xPvN8tcdpPlyXaQyP86/LFu/irT0++QYSdI9u/b83zV6cY+4eLWlKMrnouj37rbiaN9u35dzfxV2Wg380avc78JJt/h3f8Bry/Q9WT7Lvk8tRG6q/wDe/wC+a6rRdcghZ03yBWT55FolH3bGdryuegw608d1Eny7V++v/s1aS61CqjY8czfe8vd96uBsfEFndMLO5eRmWJmiZU+X/gVW7XUkaNN77GX5JdtctSX2Tto05HXf2h5cfkzSMvy/dWsy8uIbiEJsYtH96NX+as2TVkjjE1s7Mv3dzJ8tZ0+sQrIEbdvkTf5zfw/7VcVSod9OmbGpXUMLI77vlTdtVKwtW1iaTNtC+xN/3o1+Vay7jXZpF3vcs6qzeU3/AMVWbfeIPJhR0fcy/Knzbf8AvquWpUlE6o0eYtahrX2iF7VHxu3K3y/Nu/vVzOua1D5Zs/lYfd/2vlX71VtW1vddPC8yp/F81cfr2pI29IZo3Kv+9/e/NWHtDo9jIta14ihWPyd8m7duf/arivEHiqVXKbIx/wBNN/3v9ml8QagmnxqNjZ2fIrP8u6uO1rWAzfJtHyfNTlIcYjda8YXOZUR2H8Kt/E1cdr3ip2kaaa5+Zf7r7ttO8Qaoke3ekn8W9t/y1y958zPs+7s+b+LdWVOMzb4S3ceKImUpC7Nul3fvP/Zav6Lqj3F0yXKZMf8ADJXISfNdrP5Ku0L7U3fwrXQaHbzRKibFI3bt0iV1RlEiVPm949O8L3k0cKPC/wA33vu16R4U1KZduz5nbbvVq8r8KiZZIUd2zJ8z7Ur0jw3Hc28bTeWo2/KrM/8ArN1dlGXu2OGpH7R674dmSFrdneMBvlVY5Vb/AIFXW6XeJHvR037Zf4mrz3QVtljt9luuN/3V+Vt1dp4daOZY5k/1v8a13xlM46kTvdHuoZreF3Rv7rqvzNXXaTcJGqpvYM3/AH1XCaLNDNGsPmqpX5k3LXXaTcbriJ3hzt/ih/vV2xqezOCpGUjtNNvE8scrC2zajf8APTbVyONI/kn2rLI+7zP4masTSdSht08mZ94bcyf3l/3lq1Lqt40f7mbeWTc25fmrpj7sOZHH74/WJvs8yedNsKtu3fxf7VcTrmqItw8PnL5bSt8zfMzVta1qmGXzHzJH81cXrWqTJIzPZttVfvL/AAtWMvjNo+6c54hvIZP3MMPl+XKqtJt+9XJatcfbJEuRMrLs2qy/e21taxdPfTGZ/kXft3Mtc1qVxMzN8i+XIjN5jP8Adb+7XHU5JTO2n2MbVr52bY7yM8aqu1fu/wDAa5nWozHvvJkjLx/8tPvV019F82+a5j3yfLE33Wrm9ctxGyXNy67pEZUrmqHXF9DndSt0S1R3hUL/AHvvN/u1z2sRJ8kyQs8jN/C/ytXRag32qGTziqDavzR/3v7u2sbWP3jh04/iVvuqteVW907aPvSOZuLVJ2aH7N80f3mVflqC1hSOQ+T97/vqrs2+aR32Kqf3qbHC8bZdG2fdZv8AZrzZR9/mZ6NOXL7pk31qFtWm+bc38VV4LfyYUR4WIV/4q3LiNI1MKfN/EjVRukSZVd/LzGrLt/u1pGfKaS94qx/vF+dI12tU9nZ+XcbyisG/hb5lqPynj2TTQ7W+9t/vVoWdxvuE+SNUV9v+1upSlM1pxhyly3X5XhSFi396rstm7f6Sj8LtVlk2t/47VbT1eZWTzm++zfvE/hq5GyXqh3fbIyfwp96lGnLm90rm9wRo/Kk+eFnT5v8Aap8dok0iTBGYr/Du+apPs0wRHe1ZQ3/LRn+ZlqXdNMweF1C7m+VV+Zlol7r90IxnL4ih5L+Z/pNtIyt825vvLXrvhg7/AIVAlA2dPn+XGB/HxXmVxZv9oZ38wL/H/srXp/hoxv8AC0eW+VNhPhiev3+a/a/BF3zrMH/1C1P/AEqB9BwtGSxNW/8AI/zR5JeXDrC0Lp86/cVm3Mq1k6k3nW7F33q33m/vVueTsmfzoWH95f4mrH1SHdI8UPyD+7/er8MrS5fhPFp+9E5vVDcyRtDE+WV/urL8rVl3X2xd801sqL951jfdWnqln5Nw8rxsDGu35azLizDM1y82Pl2uq/LUxl3kWZepSBlaHZGv8O3/AGapyRurbN+4MtackKXUap8qL93d/s1Wmsfs8LoX37fubkrSnWjEzqYfmlzIxNSbdCkKeXjZ8se3/a+9WdeL5jNCm3O/5619SjdV3w/7K7WrJuFmhjlTO12fdu/2a9CnKMYHn1qfNMxLxbaOTf53z/x/JWPqEzw5SFPm/jZq2L6ZIyZvl/4F95qxNTkhaY/J/vV2UzjqR98heaCFv3jyFmq/aXF1JLvd9p+7t2VlyfNIzoy/7tW9PjdptiO2KuUeYuJ0mnzHycI+5lT5Grb0ubzI96PJu+981YWhxmRm2bd38O6un0bT5mj2TPgM/wB5a5alPlPVo/Cauj28O3f97b83+Vrct7e8upopkZvKZP3X7rbVPS7SH/Voiq38Lfdrf0mHyz88zRj7qL97bXHL+8ejTjL3RbWBJGELuxVX+fctbHhvw7DqmqfY4bbzXZf3q7/4f71JbWMy5Tdnbt+XZ/FXT+EdFe41iJEh3Sfwbf4d1Y+zjLQ3qRlGHMfS37Enwj0Oz14eM9bh85LNldI9m7cyr8tfpL+yP4BufDN5e/GbxJNavqWpP/oG394/l7flZl/hWvlj/gnX8HbnWNF0rw09neL9uumkv5JIv9XH/F8392vv/wATa54Y+DfhWbUrDR45/wCz7fytIs2TatxI3yx7qcvd91nwGMrSrYiR0Pw70ebWlvr/AOKmq6fqEzStLbxzWv8Ax6x/eXd/8VXIftS/tQfDX4e6Omm6V42stUmk2/Z45tO85V/veWy/+hV5n4r+L3xRm8L33hKw8KxWmpas0b65q00v3o2X/UxrXkPxK+HusapHN4qubKTVbyx05lSOR1RI1/8AQVWvOlKvKMuTQdKjScrSPG/2kP8Agol8VLPUH1+58VedbWNwy6No9qu6RWb/AJaMzfNXz54u/ay8Q+Jr+2+Inxgvbq5VZd0VjfXTMsn+ztZvu/7tQ/GzWNW/4SLUbDwveQski+VdXEMW5d38Sxs1eBeM9D1LxV4kgbUryS4trOJVt45v4m/3a5rU49fePXoYWUtIns+vftYfG/8Aao8Zab4Amv7qz8P28X2eK3ht12WNr/0zX7qs395q9T+PH7V/iT4Z+BbX4Cfs06xNpkaxQrex28Stc3ky/wCsmnn/ALv+zXgvge11D4feH4vCvh7y01LUtz3V591o4/4VovNDTTbP+xNH3TXV1K0t/fbtzM275VVqa5doy9fM0+q81W3Kc98RPEHxO+IHh2X4XaU9xHp91debr1xZu32nWJm/56t95o1+7tr0H4U/AfwN+zX4a0bx5+0Civb3l15uk+G43XzLpY/m+b+7H/tV3/h3xh4V/Zt+C8/ja80HRbTV1WP7Leax8z3E38McC/xf7VfFXxe+J3xR+P8A4uk8f/EjxldaxeTK0Vv/AMsoo4/+ecca/Kq1sqsFpCI44OrWn/dieu/Hb9u74kfFTXNZv9S1jTRbSW7W+jeF9Li2abp8O75dyr/rG21826hq2q+JtS+3+M9Vjd1+XzFT5Y1/uqv8K1u6L8O9Vb/Q0tlQSfNt2bdtaVj8EdVa68l0Z/n+6q0pVoSleTO2GVy25R/gzQ5ry1TUvD3i23dFXakPlfxV6p8J5viXBrEF54P1JtL1K1iZPOsZWXzG/hZv7tP+CP7Ob3l5aXOpWEkcLSruXft+X/dr9FfgD+yn4G/4R2K5vbONE2b/AN4iqzf7Tf7NeNi8RQcowZ6uDyOpKLkeAfCv4O+KviN+5+IUP9pX/wB77ZNLvdmb7y/7tfYHwp+BNnb+GYba5T7yfJHs+VlX5fu/3a6/4f8Awj0Twz4ia80rSo1ibb8qrXunh2x0m3+z6VNo8Jjj+XcsW1trf7VcVSpGU79D06eUQoxPmfxZ8Bb/AFazazttE+Vf4lT5f++a8g8ffCubwixe80yaVWl2I0cFfpBP4Y0ewgFzCAu5e1ea/GL4F+HviJor2cNv5LK7O3lv8zf8CrGpGMpB/Z/NGXKflj468B39ncfbNNtmeLeqt5zfNt3V9KfsE2/wv1jxNFZ+LfFrWbzbV+ztFv2rVX9oT4G3Pgu6EMMMjKu5/lTctaf7DdroM3xOsdH1m2hilupVW3kaL5pv9n/ZruwVb3vZ3PkMywfs+Zo+if2lLPxV8DdJj+IXwcmmitI4JEvNNhfZHeRt95vmr8qf+CvGg+FfjBryfF3RPD1vomqrp0fn2tvFt+1L/e3f3q/bv9qf9m7V/G/wb8iC8UfYV8+KaNs7o9v3Wr8av+ClHgebSfhfqXid9sU1jdLFLHMnzMv+zX0sYzjKMo6RPm8NU5a/LL4j8zVjdt6O7M+7a+6qklvMYTCXx5f92ta4ZJG/hDt/DUE0aLJwinb99q9mnKHIezUj7hzlxZ+Xu2Jjb/Ft+9WJfWrs+xONtdlcQ+c2zYuW/vf3ax9S03y8v5PLfwrW1OWvMjllT7HH38e19rj+CqfkeYT8nH96uhvNJSSQfuV+Ws64i2syZ+St4ynI5pR5TJj2LtTvTo4/LX/aX+JaszQ/x7NrbvvU37Om75+q10c5lGJLbq/y73bc1fY//BMbaNF8YKvQXNkB/wB8zV8bQt82w8/JX2L/AMEv33aN4xX+7c2P/oM9fpPhD/yX2E9Kn/puZ9Pwhb/WClb+9/6SzxD493Aj+P3i9C/3vEV1/wCjGrF09naQINwMjfeWtH9oVGPx+8YTRnD/APCSXSgev7w1kafN5TK7v91K+Lz6PNnmK/6+T/8ASmeNj/8Afqv+KX5s6bT1haQp823+Kt+1kSONETajb/kZfvVy2nq82x/OZT97atbFjdPGzP1Lf+PV5HwnD9g6Ozut032VIWwv+z81aEM0LQvMiYP3dsnytWTZt5cio+7fH99av28kPyud25n3f71HxESNC1j8tV3ncWTdu/8AiqWRZvLdJXw33kqKO587emViZXX93t/honk/dGFH3Ns+dmetYx+0Z/EUbyJ1489lVk2/L/DWZdKnlSwujP8AJ8jbttad5saQu+7d/wAtdtUrqH5vkTKf3v4qv7IRlyyMeSRPMZJht/hqtLD8xCblX+LdWlcQ7mCJHtZaoTske95tq/N/31WMoyN6ZWX5mWHzNoX7lMmCRt5Lv833ljalVngLJ5e4b/u1FJJuY5T+L5maolTOyjU9n7xnXkj/ADb/AJfk3fcqqZLZmKPuP8NT3gPlnejZZ93zNVC4k6h//wBqo5fsnpxxR1t0s32hdibW3/PVObZHJG8yMx3fw1p31vMq733FlfaG21VuC7N8iM25Pk2vXzvtI/Cfq2Hw3LHUrR72kd3Rfm+5tqeGONYx5xwP9+o2VI8og2v/AAL/AHafbzP52/5nf7vy1lKUz0qdGMTSs98kgR4cf7X+zV+OFJFHmdPuturNhvI42Ub95b5fuVfhk8uTe+512fw1yS5+fmMsVR5ocpfhaSWEbE2hU/v1fjaGGPztjbf49397+7WP9pcf6S7/APfNTWtwm37TsyzP8ys23/gVddKMn8R8Rjqfs5SubMciK3yR/N/B8n3q1LW4e4jjhdJP3nzq2z5a56yukb/l5y2/atb1nM8McTzJ91tybq6eY8LlNWG83xqjv833XWN60LVYW274G8qNNzqz/wDfNY1jJ5jMlsiru+/JHVqOaRm86Z2Qqv8Ayz+bd/stXVRqSlHlM5Rj8Rfkmf5P3LbG+Z/nqOa+gZShhVWbdvbNU5tSmZfJmdRt+Xb/APE1C3zNs87/ALZtXTzGUo83vE8cjxsI9mE2fLTFZFkG/n+Fv7tV1mjm3XO1vufd+792kW+2qsyIy/xbZPu/NSqVOUiNPlNSxjtrj53fYW+by2qzGvnbhtVdr/Nu/irLhuoVkRPP3qqfM2/+L+Kr6yQzRo8j4Mfzf7VeXiKkpyR10aMYxNWys5p5k2DYnzfdT+KtfT7cxr99mEf9771Zul6gjZmmmaTc3y7n2t92r0OpQ7ljR1H99fvMv/Aq8upze15T1adSnGlozUt4/Lbzkl3M33/3vy028muYV8mD5k3Lv/iZqitby5bcmxhJNEy/Kn8NL5jySIHTZIq7Umaop0+Wr7x1+0pypE1pI67blEjzu+9/Cq1q2do91JjfvZn/AIv4VqlYr9skRFRokX5vLX5d1dDZw2ki/c/e/Lv8t9rV6eHw8fiieXiMVy+6vhGWel+djZD5e2X+H/lpVqHSfLkZJpmUL83l7Pu1fs9P+0Rl5hwvzbf7tX7WxxMk1tbZjkf72/7terRw549TERMr+ybmeEO4+99yt3TdJaG3jm+xyeVv2o0bbq0tN0dIVeF33orfe3bttb3h3wy9vDjZuDS/e37a7Y4ePVHDUrS5vdM/S/Du3DpMzpJLtX/Z/wB6ty10FZIVtnfy93+qb+81dFpvhm2jt4dj7/4nWtjTdF87L7IQ/wDyy2/N5dbSokrESi+U4G+8LpD5UyWuDu/1i1i6v4ZdrgwmHzV/iZkr1abQdtw6OnmFvv7m+WsjXvDfl3Ucy/IzL93+9RGjynYsV2PJbzQX8xvs1tC6Rqu5W3bo2rn77SXjtTNNbMu1/u/e3fNXst54deO3/c221vm83/pov+1XMXnhuFoTNs2ltzPHtp+yidtPEc0eU8t1rTYZpNidF3bmX+Ff4a4zxFpvkys78q3y/wC7XrWqeHbPyXfY0P8AdVkrhPFWmpGux32eS+2Ld/Eq1nKMTf2zPN9at90Z2bfvbtzLXM3E3+lCHZs2t8y766zxRDsk3wzyB/4P7tcTqy/uzIXXK/M7VzezFKpAat5FZtvSH54327l+bdTl1SZXaOZ/m/g3P95axmvodzJ53H/fPy1A2rJc3Hyfw/fas+XmOaVTlOjhv4fMVE+7/E1TQ6hNtZPlTd9/5q5i21xI92/c7b/4asrqUca/675GT52+9uWseWXNzEe05Ycp0P25I41tndgdm7ctPbUPld3nZlX52/hrnv7aST7j4f70Xy1F/bDyL9/e7fM+2qjTjLY5vbe4dZHqUNvb/aXdpEkdflVK0YdQeb5E8wbV+Zo/urXE2usIoEKPiL7y7v71XrPVHW5SF33pJ8rLv2100aPL8JwVq3N8J6DpmpfKHeRiV/2vu10VjqUO6H5/kb+GvP8ARryHy97vHvV/vb61rHWE875Jm3N8y7q9alGMYnmVJHcprE0cT73V12bYtv3t26tFdWhtYX2XMcrr9zan8W6uGi14WapYJu+X5t396rMeseWqJG+4M235n3NurrPMlGXNzHp2n+IHvMP5ytt++zfL/wCO1rWuvW3ls8c2GZtzq275WrzLS/ESSAOm7zV+X7v3a2LHXEkZN/Lxvv8AmespS+0a0T0yHXJmh8yHcNz7drfNu+WtK18Rw7j5k2122713/e/2ttedaTrjlgkMzKrf3m+7V2bXEhkd9m7bFt3N/FXFUqcvxHp06J3c3iTzGCJNJEy/61Wb5Vasq68RXNrI0M253/3vl21yS+JN0aJGkm2P/wBBqG41aZo2Tzo9iru2s/zMteXWrRiz06OHlI6S58UPt2fKfM+4v+zWLqHirdbyokKj5/lZvmauduNWma33u6na7M3zfw/3ao3F8F+dLlkVvvRtXDLEc0viPQjh5RldGjeapNcR+dC+0SPt3fe+7XPatqyW9vJM9s2z7ryR/eb/AHf9moWvJo7hntpsIu75Y/utWFrl5NIqQzOyDd8m1/8Ax2s+b+U3jR+1Ipa9rEzffm3/ADbd1cpqWrPLHLsRl/8AHt1a2rSPcfOiYCvXPX3nW+XeXfu+Zo1raMuaVmYex5feMrULj7VGEd2dv7tZsOm3EjPsdW/2v7v+zWncbJpMbNu35vvfep9rbu0Ox0Yru+8qfeq/acsAjT98y4dLdpD2f/Zra0HSpmkZPmc/dqW1052ydijd/eWtvT9Ptlii2Q/7O5qKdaHOaVMOb/hez3NsRGRliVdv96vRNBt3t7XZvjCQ/MrRp91q4zwzp6Mo8yRt7ffk3/xV3Ogwo21E+4vy7lf5t1ejRkeZWp8sDtvDawtGkP29V3fPuZK7DR1NncQon3WT+FK4zQXht49gfcuz7y/xba6izuiY1+eRFb5ty/w/8Br0KcpcpwVKZ22kXyBURPLDN/D/ABV0mj6lA8Y2PIjfw/Pt3V5/pGrQTW4m2fJ83zNF826tvS9WSNUtYUZvL+4y/wAK12wjzHnVNj0W1vHtWzH+6E3y7l/hantq3kLLcw3MKvH8v+181crb6wkioUuZGDfws392pV1xPM+e5XbJ821q7Y/AcHL73umjq14j25R9v/Af4q5TWLqG2Evzq/mfN5dXLq9+0K009zkLuZmZ/l//AGa5jXNWRpPO2xoPK/iXc26spbGsYyMrUJ3ib59qjd8sa7vu1g6jJ/f8v5mZ5Vq/qF9ukWFJmf5/vb/u/wC9WPcfZlXfNI0Uyvt8xW+9XFU/vHZGU+XQyNQkkmZZrx2wsX3o2/1bVzusalDJHveZvlTZLuRl+atfWr547zZczK+35fMjb5V/u7q5DxJrDx24hL+aVRv3LP8Ad3Vyeh00utyvPKjRyeQ+Nv3Gb7u6sDVr6FpCJpmRm+VFX5lam3msbm2b5HX7zsq7ttZ91qEM87Rl4xt/irzcRKNP4juo8nwiRzTSMyJB5qKvz7vl+Wp5QmwP8qfxbV+7WbHcI8jb3UK38P8AtVpWrJNMEd9+2LbtV/lX/arzanve8ehGMRNqSfuYfmfZVL940Zd4413P8u1dzbaszSQsk32aRnSN/wCH5d1QNHDGxzcL/Ez7fvVnT68x0R94bH5LQna+9F/vL96kjtnWQedDIis27dJ/DVnTbVGZs/L/AL1TxokNx8j4WT7+7/lo1axlLm0NuXmhqTWipDYv5KM6K2591TWcabtjvsVl3J5a/wDjtR28e6HZ1Zf4d/y1citYWVIX+RVT5tv3qPacoRpyY638ldPjtkdS33vLkb5ttTx/vLxIUs8Nt2+Yrfw0yzW2tvnmRVZf+eifeVqsx+Yqw/Zk2+Z8vnVEZfFYrl+0QTNDHux5m/7v+y1el+HUB+FuxYgAbCfCYx/frzq4t/MYeSGD/e+V/lb/AGq9I8PxhPhlsxtH2CbjrjO6v2vwOd86zD/sFqf+lQPe4a5vrdb/AAP80eWR2vlxpZzP/H/F8u2s3WIdrfOi5/8AZa1mb5lm/eNKv3tq7lZf9qsy+t5Y5d/zMi/L93atfhk583MmeRRjGPunL6lp7x7k+VfMbbub5ttZs1ukzHY+1f8Ano33d1dHq1nHH1T/AHKz5rWHzGjtoWXd/Cv96uf2sY6nZHDykYclrtVke2Xa33938VUbousghd9jN9xa2ZmtlkXEPmfwsv8AEv8AvVj6lLbRx74XYFfmT+KroztU+EmVHliZOpLDIz/ufnXn5f4a57UXdZHQn5V+bbW9qU3y70K7m+bcv/s1c9q9wNr84Zk+Vm+7Xq4fY4K1M5+88xpN7purJuGZdybPvfxN/DWlqCOqPMj71X+Hf/FWZdM8e55h95K9Sn72h49Sn7xXX95cDL42/L/wGtXSYx5gOxvl+XbWbD500ibEUsv39tdFo9pj6Sf7FdPL7gUYzlI3NJsfM5+6yt86766rQ9NS4w/k5VWxtasXR7GGVfn/AIm2o1dloenooZ0C72XbXJU7M9mjTlze8WtLsEkZ9k0Y+fau7+9XUabo728afJ95Nybl3baqeHbcQqj3McbBfl3NXV2FmkjPJDcq4Xb96uOpGXxHq06dKUYpEOk6X5ylILZstF95f71emfAXwimreLre21W5YLuXfcfd2rXKabZfZ7h3jmZG+4vyfLur3b9kP4U63488VWc3h7TY79VlXzY2bb827/x6lHlcRY6MY4WTP1u/ZK+FOm/DP4Z6LDbbrq81KwVrJZF+6rfM25q1vGEj+OvHiTWFst5pfhtdlrb26/Leag38Un+zHXGfAP41eJ9e8SS/DeGzaKbSdNaJmX/l3Xbtbb/tNX0V8K/CPhfS/DMNhYRR+YsrS3En3mZvvM1cMv3kryPzapzJyPOND/Zr1KGFdV8SXLXVxskuNXmb/VLIzfLHHu/hWvnX9rjwb4vvvM+HulJbvaK6tcafp6N5cO5vl86Rf9Yzf3fu19SftCfFC+1vTIPA/gIXn2mSfY5tU+VV+7ub+81eaftlfEzwv+zP8K7fTdHS1PiprJVih3+Z9jkZW3TMv8Un93+7UuVKNKXY68LRk6sbbn5i/Gj4av4T1ObR9YS3udXbd5sMO1fssf8AtKvyq3+zXg+gfC3VY9Yge53QrJP/AKU0nzMq/wCzX0BY69rGrLI+sbUnvLhpJ2kXczbv9qsK6h+2X0eiWz7ZvN3TyMn3f92vmamKjf4T7/C5VOlh+aRw3iLwe+patPqttZRwQw7Yk/vNHt+Zqy4/Elh4Z1LzrnSrd0t/me3k+Xc235a9Pvo7DQfDGuGaFmnjt22M38Tf3Vrx3VtB8YeMNHm1u20qOB5k/wBW0u5qKdT23vIwo4flZ4r8ZvE/xI+Nnj648YeJ5ldY38rTbVflgs41/hjX+Hd/E1ZOk+DfEcbxubbaFf8AiT5a9T0P4J+P7qF5byzjTyZdreZL91q6qx/Z0+JbWsVzYaUt5u3b1t7jdt2/w12VqyjGNmdeFwspu7OS8A+A9Y3R6k9hJcS7/kWNl+b/AHq7nxNZ2ek2qasmiTQyKu6Xcn3f+BVZ8N+EfiLoOqeTdeErqFI0/wBX5W7/AL5rtvFmueHpPC+zXka3favm29wu3buryK9aPMe9Rw0eXmRjfDvx/olnshunVE3q21v/AGWvvb9lXXE8SWdto9nIyJIqq8lxtb5f4a+Crz4d+Etb0m21XR7xVbfuT7P91v8Adr65/Yt16aOxSO1n3vHt/wBcm1v92uLESheMkejh4ycHBo+0ZdP8K+FbX+1tYufnX5XZV3eZVvwT4i0r4heJjo+m20zJDtVty7f92l15/wC3PBdnc6rNa/uUVpdrbWZqT4O3GiaP4gj1j+1rWPajOkbS/wANdcKlKP8AhPPrRnGlJxjqe4W/wlbULBJgm0bflWue8Y/DK+0O3juAjKD8r7a73wF4+s9ejCJqNuyBtqqtanjHyrq0XO1l/ir2ZYfAV8LzwPi6ea5nhsdyTPi79pb4dvq2gyv9m+aGJmST/wCKr5n+Bf8AYnh/4sWb6x+7aO82xTL/AAtur9AvGXhWw8WCWxvIcbd33fvV4P4T/ZB0q18YX0NzDcT2011vguNu3y23fKteVhYxjV0OnPeWpSjM+x5YLZvhqNE169WeK5sNsdwv3WXbX4x/8FY/hzo+tf8ACTaDePNHpWl6XNcJJGzfvLr70Kt/s1+vXg+K6+Hvga58H+LTJdRQt5dq6/Mvl7a/O7/gsN8LZ7z4J+J/EPhW5ke3jtfPfy23P975vlr6aMvejA+AnKPt7n4GrcGTyxc7fOZdsrf7VM2J5flvt37/AOGtW+0/7LuhdMP8zfd+bduqs2mtIV2bhEzfPuT5q9eMoQ91nurmqQMy48mdtnl7f93+Gsy6skWOR0RifvJ89b0lqnmL5e1f9plqrdWqFmR3VQ3/AC02U4ygOVPl3ObmtfOV1dFx/svWVqGmw2+R975/4v7tdXNpvkwtDs+Zl+8q1mXGmzLG2+Fm+fbW1OpKWpyVI/ZOXuLeCNy/k/xfdqpcRw7nfZW9dafubY7/AHfl21m3MCRs2/cq11xlzHNyozWj+benT+OvsL/gl1uOi+MmOMG5sduP92evkSZE3b0Rifu7a+uv+CXAxo3jMbcf6VY/+gz1+n+EOvH+F9Kn/puZ9Fwj/wAj+l/29/6SzwP9oyZ/+GgvGK7sgeIrvj/tqaxNNuPL2JN0krZ/aOwfj94yOSCviW6/9GGub0+R2XYzt/srXxmff8jzFf8AXyf/AKUzyMf/AL9V/wAUvzZ1Oj3SNuRHw38DfxVu29w6yLDs27vv1yelzG3l3p81b1nN5jK78bvvN/drxvfOTl5pnSWl4nl7HT5l+V/n+8taVjcfJsSFflf+KsG3mh2+WduWb5P9qtXS5nkYxv5itu+9VRlH4jGUZmxbt+73zR/IvyrJ/FUMlxM0jOkfH3tzJ95qYskm9Rsbfs/75pZLh/nhO5F3fw/N81aR96Bj8I6WaaSMom7aq/eVP/QqryxI20P/AMCqeN5mZk+Vxt3eX/E1OjXd8kPyVUZcxPL9ozJraG3XeifKz/w/xVnXUMO95Htox/drcvLdFtVfYo3LuTbWXdL8q7AzL96plI1jyGJcQozF0P8A31WddSeYp4kEMbrvb+9W7dW7qGfO0N83+zWPdW/mK/f/AHanm5jojLlMy8m3/P5mTsrIuroN877Xdf7v92tPUI0jU+TuG35X+Tbt/wBmsS+XbJshfaf71Ryx5jXmker3lr9nk3pueJfl3VmzW6TM2zaF/grcuLdFHnHcR8qbW/hqo1rDJH/CN391a+PlL7R/QcY83wmTHYuzLM77gv36lW1SSRnhhZSvzfLVo2b+cSnzfd+an+RNC0SeSzOzsrt/DWHtOY648kYFdWeFUR9uG/8AHqkt5nikOxNoX+9822nL5xjy6Kf8/epm5GzD/H/epx973ZHBipR5fdJ4bi5aP9zNHs2Ns/vNVuHZJbNbI7P/ABf7W2qEbfZ2xN827/x2prW+e0be78L/AMtP7td0fhsj4fMOXn9407WSGFfJRGb+H7ta+nq8kHzpn+78+2se1mfcr71/3lq5b6hN5j7JsCRNqMq/LWrj7uh4EvdmbemyJ8qbFRt3zMv8VTLNNJHI/nLuX+L/AJ6L/s1nW/7uz++2/ZuRtv3quBPLg8ya5/g+ZWStIS5dSOX7I+GRI4XSGNgmz7rPVeS4+ZPOYsd/yU6Tfuf7M6xFv4WqnL50kjuky7fK2vC1dPP9oxkWbjUElk8l32t/s/dWoFvILyQJsYfNtX978tVmbbI6Kioqr8zN/FTI7xN2+Ty97L8jfdWueUuccTY+1Jb/ALlJF/dv8isv3mq/p9x84+eNh/sp8y1z6373EiI6Kr7fmaN6sW00KyK6bi2zduauOfNy+Z0x930Or02b95++mX5f71acepTKzBEXfs3Purn9LbanD7y339yfdrUhZP8Alt137t1cXNzTvI6YxlGBuWt8hhUIJF3fL5i/w/7tWVmSaNfJRti/Ju8373+1WXayJH8+xTtXbEy7mbbV2Jk2Lvs2H8KfPt3V1UafNL3iKlSMYmxpLNMqTecrPHtX5vvfLXXaDbpMrv5Ledv+Xb/dauP01vmVEhVNz/Kyp8tdt4fXzpPIRGR2Vd/l17mFp+6eFiqkoysdDo+mvIzb3b5flZl+7XQ6TpO1o5tmxGXd/stVHQbXdbxecmGh/wCeb10liqM4f92rr8u1Xr1KcYx+E4alTlLuk6D8rPDtQSfNu2LXS6X4f+yyKfJWUtF8q7/u03w3Y+XGyPDH8q/LG33mrqNL02e4bzo4VRVXay10RjGJyc5FpOkww42Qq+77m193zfxVvQ+H08xPJtlZ9m6Jn+XbV7S4YYlR0h3SL/dX5m/vVqRqyjyfJkD+V/q2Sq5UHtOU5280VPtD749n975K5/XtP8m8EM3y+d823+9XeXGzy1eZGd9jb/7tcxrlrbQyhNjFNu7c33aj7ZpzcxyOqWaQ7vOudqeVv/2v92uW1eOGa4a88r5FT91I33v+BV2Wp2brIiJzDI/zyKtcv4gjdZzs3bpPlZm+78tLlluddOfLM4XXo0mh+SHarJ/F8u6vM/G0dtaxvNawqV835tteo641tcb3vHbEbN833a8o8YL/AKU6u6tu/h+6tTLk5Top1JnmnjCOb7P+7mjHz7vl+9trhtek3bofP2oqbv8Aers/FVwlx5mx/nVG3bfmrzHxRdP5hQPzXJyzqG0sRFR94yNU1b7+z7y/L8tZNxq0c0b3Jm2Nv27t1VtavX3702/7y1h3GpPu2O/3f71Vy/ynDWxHtInW22uBdohfa6/Nu/hqZta3N+7fb/7NXFQas67k3/K38TVet9Q8xvlm2bfm+ap9nAx9tI6ttY2YdH3Fko+2Jw6df49rVzK6kYlb+PbUi3ySS/I7f3qIx5ZGUqkpe6dPb3m2RpoX/eL8rbv4a0bfUtzJdO67l/4FXI2eqQtHu3/8C/2qu2epTSOux9n+y3y7q2jH3zM73T9akVkm+8v93bWo2tedHvFyzL937u3a1cTY6g4VUmf52+atG31abDJu2p/erqicnxHZ2/iF5sbPLYqvzM33VqVfESBm2ffX76/3f9quTh1CaPbDH/wGRfu1ajZPl+zTbG/iX+8ta+hh7M7bS9YmkiWGafcjLt2r8rf71bVnrT7kh3yP/F/eX/ZrhrGbzFV3vG37Nrs33VrbsY7xIUe2m83c6szMv8NcdSpynVRpx6Hc2erQx2/2lOX/AIlX5ttWl1yaSETfM/z7f97dXLWN1cw/8eyfeTczL97/AL5rQtdShjhDo+2H+Nm/vV5WIqcsbnsYWjzStymxeeIEjbyYd22Ph2/iqncaw9rHvebCyP8Adb+9WU155032lHXZuZdv96oWZJLN7ab5BG3ybf71ePWxHNE97D4X3jT/ALSe8z9pj2+X8sSr91v96oG1SaTb5235f73/ACz/APiqprdO0QdEXYr/AL1f9mmTXfmMsMPzLs+RtlcVOod0aMfsj5Lp7iGWZ3b5k2/LWFeN5jeT80W7+983zVozXFyI2tt6hG+4zfxVkXjfudm9lZvl3f7Nb06ntNEYVKMY7mdqW+H9z23t8rP91ayLqO5uPkSFmRf4f4mrQuriFoU3fvfn2/NVW4vljk8mGHyjt2tu/vV2c0oxujk5feM37DuZkRMNt2/MlW7PiH/x35aYs26Yp8su5fuq3zLUsLPb3C/Pt2/cqJT5dB06ZetVh3ryq/71aGn/ALuVd/3VrJ3PJIyTJ93/AMdrY0G8Ty/JfzpRHu3tIn3qIRlH3jWUfaaHUaDcJ5ao6MzK27cv3a6zQbyQTNInzO33F2/LXD6bcJGyI74Vfm/2q6Wx1J9ypvkEvy7GjZfu162Hqe8eVWp+7ynfaPJbfZ2dHZ9z7Uh83asf+1W7pupTRstz529lT7rfxVw2lal5kZmd2V12/u2Td/wGtnT7ry1KJMu35v8AZr0adQ8ypR5TsLXVPMs/9c0e19rrIv8AF/s1r2uqXkEYvLOZndfllVotqrXFQ6nthE/ys0fysrPu2/71Os9amaYyC55+VWZq9GnLuedWp8x6FD4lhgaJIXYFlZvlT71Nj8T/AGj9yjr+8f8Ah/iWuGbxI9q7wWz/AC/xs3/oK1HJ4shUqnnMiL9zbXbHklsefKMIzO3m1yFrf7TC7AfMPJ/2qwdY1wrCu/gs3+sV/mrm5vFO3c9n8vz7XaSX5VrMk8UwtDKlzMvnK21l/haoqR5dCffl7xs3esJIX2bnC7d395v9qsbWdYe32b3XzP8Alrtf5dtYN14qgt3e2S5jV2/h/irBvvEk1xGzb1VY1+dt1cdSPNLQ6acvdNnWvEENnHNM8ykxv/C33q4fxDrk0k0ib/l37kkb5t26q+teKkkDvNt3t8zMtcnrHiItN5KBdn3k+b5lrgqfynZHlkbtxrVtZw7/ALTvZv8Almv/ALLWVeat5jApt+Z6xJtS3SI/nZX+61Vprh3kZ4Xj/eN97dXBUj7T4jqjI6i3u8Ks29Szf3flq3a6lJH8+/Yfvbv7y1ydvqEyxKnk7vn+T5qnk1Sa2yjzbdq7vm+9urilT5Ye6ehTqR925uyaqk0b/eZmfa275flqS31NGXzkto/m/hX/ANmrn21iZtuyZU8z5k3U+HWHaSN0Ta6/e3PtVq55VJcvwndTlyy1OvtdQmkX54VTc/zMv3q0oLy2jkV0Tdt/4FXK2OuQ+YryXK7Gf/V7Pmq6usYjeTYqqv3W/vVEeaR1HQxyJ5kSIjH5fut/dq/tcXSbPubPu7/mVv71YdnqXmbd7rhU+dmq/Y6pDcXH2YoyMy/I237vy0hx97c1Ifs3lt5jxjci7Fk+arUMHkqIUdX2oyuuz7v+7WRbt5eyH5Svyt8y7q1GZII9jo21fmb5/l/2adT3fhJjT5viGyabCuy5+YfPu2s9ej6AGT4akO4bFlP8wHXl686mmS6YpDuRFT978/3a9G8PRmP4bCNn2EWU3zD+H738q/a/A6bedZhf/oFqf+lQPo+HKThiattuR/mjzMxww2ryeTMrN/DUN1H50ex3b5fl3L8ys1XZLia8t4kTcwVdvmN8u3/aqhdM/l+RDuVF+ZGV/wDvqv59qVpVDmo4eFMxL63eRv30zBI/l2r81ZV3G8dw/G7y/wDVbf8A2auhmjSGR7v767dvy/xVg6pbTNDvcKCzLuX/AGv4amNSPNytnpU8PzR+E57ULiVpG+RYgrsrN/s1iXk3kuFd1y38X8NdBqNu+2RCnz7sfN/DXO6pGjcPtTb8u7+9XfRlEKmEjuYmsXDyKbeHais/zsz/AHqxNQ3sp3uuV+Xd/DWtqkfyKUm4VtqN/drFvmi2jf8AM/3Xb+GvUo+8eTisHLm90x71tqt5Nt8i/K7R1m3ioU/2v4a1Zmdd+zbsZfu1lzInmb3/AIW+7XqU4njVcHyyE02HazeTtb5/u11Gg27tlHeRtqfJ8n3VrG0+F4nDui/c+bbXU+H7fdGzvMxGz+5XVGXvExwvvm7o1v5Koj/OW+589dvoduk0LPs27fvqtc34ft5gqOm0bf4tldvodq7bOF3f7X/oVRWl7vMethaMZGrpdhbeXGnaSLdtZPmWun0nS5oWbeiqJk/1n/stZWiqjXCQ2z/Oy7Xb73y11Oh2VzGzpM7OVddjL/drhlzSPSw+Hjct2tn5cn2beu3dt8tX+Xd/vV9A/sg+IpPBPjCwv4YftU32jbFH91Y/9qvErK1s7gpNbQ5Lf3v/AEKvU/2fY9SXxdbPYbXXzVXc0TbVbctZVPdIzTD82Dkj9UPhb4f8K+A/BOr+P9Kud2qas8lxdXDRbVVW/hX+81dp4W8Za94f8Kvq/wBsbdJaqkULL821l+Zq8+0rxtrGj+C49N8SQ27XF49vE7bf3axt97av92qnib4gWzalcaPol/G6R3HleTC3zR/LXm1KnN7p+Zxp/vfeK/iD46P4D1aPUtEg8/WFuvN+2TS/u7eNV/55/wATV8RftLftA+IfiVql/wCNpr+adpNSkuPMkb/Wfw/NXrfxz1y8s7/WrmbaIbO1ZUXzf9Y235trV8m/EC8/taOysIYmjT/WxKv3dteZi4Q155H0WT041KsTJh1vxPfTPcpcyFW+Z1Z/u7v4Vrfsbi5Wa33wrujRv3itVLw/Y+Zbx22z5P8AZT5lrtPA/gua41KG2s7NZY2fc3mfe/4DXzlTEUuX3T9Fp058nvGF4ivtV1ZTYWGlSNbzNueSH5mrn1+Cfxa8SWKXL6lHo9lv+S6vFZfOX+Kvqe88E/C74b+BZviR8QtTjsbGxTfLH95rhv4Y468d8YfGLxb8WNNi8W63pVn4c8G287JYfal23N5H/u1vl+IpRjKLPPxWFlTfMtDw/wAVfDHTdDhTSrP4/XE100StKrRMqszN/wCg/wC1UvgnwX480WZI/DHxRsZEkb5FuL1o2Zv91mrK8dfED4Pw3kzw6VCgVtssi3DeZIv/ALLWDfeOPhXqlu6aR5ltNIny/vd22niPZyj7pphZOnLnke9Wev8AxR8M3STeJPDbXMcLqzSWvzbl/ibdW/q2peG/iF4Ru5nsLO4h3Ku26i2yx/8AfVeM/CX49X+k3iaVN4umu2hiVU+1bV/75r0Tw78YvB+rR3OiaxZQzxzS7kuF+Vl/vV5EuenP3T6KjUo1qRt+H/hn4Y/sWGawS4tfLf8AdLDtkRmr0j4f6TqXw71C21Kw1u4htm2rtWL5mZmrmNB0XwfcWkL+FdSurdJG/wBSs+75v4vl/u133ibxI+j+HdNsrnxDH5TXmyJVt/m+7/eqJS5pe8VGPs5H0R4T8RaDqnh1LbU7m6kuIVVYlkl/9Crs/h7oqX2oRzL9lCTPuX5l3Kv+1Xgnw50PStWtFv57+a4juIt3+tZdzV7f+zvofh24m87zt6Lu3NcS/M1VCM5T5UKtyRpSPpTwCulWumo14kburfu/n21va9rN3b2EjWc21JP+en8NcXpzeDZzHZwTW6vH8rLHPUXiH+1LGxl/sLU/MZdxSO4fcrf7Ne1KoqMOU+Lng4V8Xzv8SbS9VFzqkqxPld+167f4aWNtqGp3KXNvG6KnyqrfxV5HpWpXKyGa8mjhmX5pVr0v4ReJHW7CfKyzN8zLXHg8VGGIi5bcw8/wMlg3ym3400NLXSp7ZBny923d/Etfmz/wVA+I2n/C34d6lZ+IZpmsdeiazg8n5v8AWfLu/wCA/er9O/ia00OiPc20G9/KZdq/3dtfih/wWy+MP9vXkHwom01ZraGy3/ao22yLN5n3f++a+wVH967S0PzKNP2mIUT8tPE3h1NF1ibR7O586GJ9qXUn3pFrNm092KwyP89dVfaLtuij3O/y/m/vMv8As1VTS4VhV9nyr8u5V/hrr9ty+6fVUaMYwOWmtfL/ANGSFtzVRl0lNjJ8qjf8q118mj7ZGMyMyN8u7Z92qs2kl5CnkqqR/KlEanu2iP2PMchcQzQ/uUdSG+4rLVC8sX5eNNy/3WrrbrS3+1fP8rbN3l7Pu1l6lp8Z+4ny/eaumnU+E5JYeMeaTOJ1axRN2+FW/wBqsK4s8A7U+b/arttYsbYLsfbvZG3LXMahawqzp8wVf4v71dlORw1Iw6mDffd2Oiqf4WWvrP8A4Jehho3jLOcfabHbn/dnr5Ru49y79n3m27v4q+sP+CYMaxaT4zjXtdWX/oM9fqng+78f4T0qf+m5nt8Ke7n9Jf4v/SWfPn7SEu39oDxlC/3f+Eju2/8AIhrk7dkWVPn+9XW/tGr/AMX/APGZ+U/8VHdcf9tGrj7WRFk8z5T/AHK+OzyX/C5iv+vk/wD0pnjY6P8AttX/ABS/NnQafJuby3/hX7396tfTpN2Pk3L/ALX3a5eGTlXP3d+7733q2tNm8sId/wAyvury/fOXlOmt7j5n/fMh+9WrY3TsvnI6qW/hb+9XLw3Dqzl3+992tnT7h1Yfdx91V2VEveM5ROnhk85Vm2fw7W21L8kkPyJn/gf3ayLe8RlZ8MqL99quxzIy7IX2bl3bquMebYwlEsq0fmb5vl3fKn8NTKyeSsKbt0f3t3zbqq28k3k75Pnf7u5fmp8Mjsw/fcbNv+9/tVfKjD+6Pnt8Rp++VdqNs3fd/wB2sq7jcR7Plx975m+9WjeXkyv/AK5cL95WrMvl3Tb97Z/8dVaZZn3TJIwRE+RU/wC+qzrqNI5vItk+9/47WrqEh8z53+X/AGU+asm6fd9//Wt/tfw1MTaJja0tyu1PlZN/97c1c9qW9fuD5mf/AJaV0GoO8at/C/3vmT5WrA1SHG15H/4DUSiax2Pari186RoU+9/tf3qg2/u40d/+BKlaq2e64OxGI2feanSeTEvzp87fKrbP4q+Fl7x/QGDqc0DFa3RXXenzSfN5ar96mfZUmUeSkn+xWpbxzI3+kpG3/jzbabfWPlvvSHaqpuT+Go5oxNvaMxWt03vC+5N3/j1QSQvtVf4FbanzVpXlnub+L/gNVGXb9+Flb7zV0KVzkxlSHIVZLjbuR5MMzbWoWYxt5P2fcNv3mf5ahulhhbek25arxuVkd0dXX727+7/s120o8stT4zMKnMbtlcedMm+ZlVU+6v3a0obx5Lcwo+z/AGv4q5zTpH2h+7VrWbPtP2bbu/jZmreEYx1Z8/KU+c6TSbiZpGT5U/hRm/8AQquXH+sfzkZDsVU/76rCTVtqi2mSN9vyrtq9HqFzND52xVH3fv1EZT5tRSlzaF+ZYcv8izM33tq/d21R+yQzLK6blX7qbX+9RNqDxw/u3yGfbtVvu02PyZ1Z0fay/dp+/wDEEteUGWPc0m9i6/eWRf4qpNHbNvuX+dd/y/PuqzfM6yLNJNv3fxLUK2/ys/kqC38LfLSjKQL3vhK0d9tVoXRVZX3fMtaFnfIwZ3hVf4fMX+KqsduJ2Uum7cv3d33amk8yFRGj8fe2rRKMZe6VHnOj024eRf3KeYzJ/e21prcfZ1PkupZv4f4VrmNPuts0saQswVdz7v4a2bPY0aB5m2x/fb+Kud0ff1Or2nuWOhs7uGE+ciMq/d+WtNLtJFSzhRnK/Mm2sOxWa4+REUo0W5Pl+Zfmrd0+WzjiCJtfb8y7f4a6adLlncxnJVIWia+myTKrTTJzvVV2r92uv8M3lsu/fufcm3c1clpW+OL/AFO91Tckjfdaun8NyfaNs0yNEq/wqv3q9zC0z57Ec3OegaDM9zCNjxptbdKq/dauq0G1tm3XO9pIm+bbsVVWuF0uZLVY4fIWNGXcit8zbv4a67RrqZpbe58za33mXf8Aeb/dr0adP7RwSkejeH4/O8p0f7ybUX+9XZabawsEtk+QfK21V+9XE+H7jy1T54ztbc6xt8q13nh9vtEf77yzKyqrtH8zL/8AE1rGPLEn/CdBo9n5Nr5Lopdmb7v3dtW5l248ubLKn8TfNVeGa8tYV+fP+z95d1WZCjKX8jY2z96zJ96o5oyKjEqagqR7kd1y23Zt+61cz4gjS0j2XLspaXcvy/dauj1DZHH5z+Yd3zRR7fu1jaozRw/ImWaLd83zbaxlLlNIxOV1hUuml/crCm75FZf8/NXH68sMgEqc/e2fNXXa1CGuDC7+YN3mbo/vfd+WuN8QSQwq5d+d7SfMm3d/wKsuc3jznn3jC68uGaZ9vlbN21fvLXk/jpvMjaG2RVRdzRN/Ev8AwKvVPFU3mJvtodu5PnVfutXl3jC3hjjbZbMsvzebub5WqObqzX4fhPKvFKeTI6JuzIm5F2/erzDxRCity+CvzOuz7tekeKP3kjoiMpX5X3NXm3iCP/Xec+7bu2L/ABUub+Uzqe8cF4imdY5dm37/AN5a5ua4/fbH53J81dF4hWZf+WON392uUvF+zsfm3v8A3a2jyyOWUeUtW93tYo6ZVa0bebdH8j7f/Zq52GTdJ5KDFaNvePGqoNu3b/FWkokRkasF4jbod7K3+zUkd47Mdj/ef7y/3aoQ3Wfvj71WM7vuO3y7ay/xBzSNKxutuzyvm+Xa6slalnIkapM6K53/AHawre5RWWXeq7vlT+9WnYs8f39vzP8AIy1UdiZRN7TbjyFMexfu/wATVpWO+SPjcu59y7v4ax9PWFtvnD73yu1a9nN9onXzplfd8v8Ad+7R7QI0zTt5PM+ffkL/AA/3qvWtr50/nPwsf8Tf+y1Rs4xt2JuRa07ePZIg6IrfLTlW0kyo0zW09Zljih/5Zt8u7+KtuwaaFETep2/3X/8AQqx7P95H8j5WP5XVavxzMg8lHX5trLuavNqVvtHdRw/MblvqEy3SzB13r827ftq39qRd3nP5r/wL/drFVnXZNGy/3fl+ZqveZNMpeEL8rqqM38S15OKqHvYOjJF9Lj5Yk2bVb5tzJ/DTbiTbIkKbmf5m2qvy1VhZ23o42Ps+Vd9NW6muFD79zsu568mpyyqns048seUluZpo23w+WnmIvzbvlaqlxff6O80M+/dx9yo9QYMv8OGX7yp/FWfcaj5sapZwNt/ij3fd/wBqnTlt5DlHlkTtqj/wJhVX7zJVeSRHs9iOzbU+XdUdzsWZEh2/7W56q3kkyqzzI2FX5mX5q6Y8vN7phKPNEgmk2ugmfL/88/4apX0cM0ju7thf++d1TeT9oVXhmb5fmRv4qrXVi8dwqbGK/eZa6pc3wnHKn7pRk7TO7JtfY9WIZJlVkMzMq/Lu/vVNeWLzLv2bAv8ACyUn2eaPYibfv/3flo5eaMSffiTWMKK3yPv+fc6ru+b/AHq0bVbZvkR2iVf4W/vf71Z/lzW7s8PG75dy/dq3ayIbcJ50gl+ZtzfdpKXKXGJtaTqDr883+sVPl/4FW9p1x5OxJpm3Sf3U+bbXKW801ufkm+ZV3Ju/irSt9QS4eCZEkRP41V/vV3U5cxzSox+I7bS9XfSZUSZFZZHZfm/hrZXW9yqyXK5k/wBn+GvOYfESMwSdGYq/7rav3a0ofGEzf6HNMpVfuts+bdXo0ZHnYinGUTvl162WfZbTSEyf7P3qjbWHjjd5h8iy7dq/3a4638SJNImybDLu3Nt+VaZN4mRV/fTfLub5d33mr0acjyalM7bUNYeaPZZ367PvbVrNm8Qf6QzunyR7d9csviHTWmVH3Kjfek3f+y1BJ4ieJtqFZWm3N8v93+HdXRGpy7SOaWH5jevPEkPmTfvt25/733VrNv8AxNczKUebZ/FE2z/0KuevPEXzMjxxmWP+6/3qwtQ8SIv7nfIYv7q0qlaPQy+r8pval4qfZvR1DL8zrs+asjVPEUfktbQzKzb/AJ1j/hrmNQ8SbY9jupVW2uzVlXWseWrQo+3/AHXrmlUlzGscPy7Gtq3iCWNfJedt395U/wDHaw7jUNzMiTKq7/kXfuqpNqTyYTf8y/wtVSaZ4/nwu1nrlrSlI19lylxb658sskisW+b/AHqkjmfzN/nR/L8ybvu1kLeOkbTed8v+zUU2qOzDY/LcNtrm+L3S/hOguNSmZVm+X+79+j+0pto+dUaT+FqwZL4zL8/y7futUkdxN5i/6tv9pvvNXNKX2TpjLlNuPUnkkV5E+RV+epmuvNY7IcbV/ibdurGjvEkUQvDz/vbamt7r5UT7399t9YyjynoU6kZG3DqFyjJ8qsi/N5n/ALLWvp+qPt2bMf3JK5iNfm3puI+8vzVbsL7azb5m+b7sa/w1zSjJHZGR2djqD7t6TfKq/MqtXQaPO6wi6d/vRbdzfxVxWj6nuZUd8MrfJ8m6ug03UvO3Q/ZlO197/wANYylM2p0+Y6K1u/Lj+R2xG3ybvmatGO8fzF+T5Gfb83/oVY9ncJfND88cUknysv8Atf71X4ZPMZIXRW+f5v8AerHm5TaEZy+Iv+ZNuTftfy/vN/Fur0zw65f4Y+YV2E2Mxwe3368sfEjRI/yv/ufLXqnhlU/4Vqixn5TZTY/8er9s8C23nuY3/wCgSp/6VTPqMij+/m/7r/NHnt5H+5itn+5Ii7v7tZ8kMyzSp5KhI22r/d21qSWb3CnenCvuTb/6DULbPOh3w/Kr7Zdz1/PkqnN9o1o4X+6Y95buWNtC+xmTzfl+6y1i6hIixu6bR91nWN/vNXRX1u7M+xNyK21v9paytYVIdsH2Zl2oyp5f3v8Adp0/dPVp0/7pyGuRXMzffkVY2+Zvu/N/7NXO6sfLb7NMjJt/irq9Us90n2l3ztXYism5WrmdS86Ni820p/drvo8vxGv1X3DmL3ZIzIgVl3bflrJuo+S/3Ntb2rQpG2P4W+Xy1rKns3DSfuWAVflr2cPLljc4K2D5YnO3lmlwz7Jtzbty/wC7VWOw/wBKeR/+AVrzWe5m/c/w/dp32fy4N8m3/YbZXfGpKMeU8epg483NIi0+zSZvkTCr9/d/FXS6OszRjeioW+VmWsaxhdFX523b/wC58tdFpMflrsRN27/b/hraNTkMJYXlOi8OxoNls+4r/Ht/irudFt/tHluiMzxoq7WX7v8Au1xuhyOrIyQqhrufDLPJInd2/vfKtVKXNE2o0Yxl7vU6fQbONVLwwySvHFuVY9q11ulRzeVbzIm3+J1b+GsHQVSSNIYfLZV3bpN38Vdbodm81uj+Su5fmfa+7dWTX2melTpxL+k28zWvz229G+b5f4f92vVf2f2ez8XWSeR5paWPyvMT737z7tcFZ2MK2fnbN7q/7j59qq1dz8KbeaHxZDNYW0yXEm1U2v8Aeb+9Xn4upyYWpM6qeF+uTjQl9o/S74m+G4bT4ZS/EzwZ4psLzWtAtYWk06RvMjXb/s/xf7tfMHwX+Jut/FzxlqtnbPJJqlxPJdXEdvFt3MzfdVa+P/DP7SXxy8E/FbxVHZ63cSaRb6pI1/DNuZY/m27a+z/2Q/i54Bk1Cw+IWgww/wBtLexyrG0G1ZGr4fKM3nJSdXY8XijhChlyl7GXNJamT+1t8IfiX4VvNLstb8PXji4+ZpGT93GzL91q+cLjwref29NDqUKxxWfyRf7392v2s+K8ejeLvA3/AAmfjzSLGWBtOxArL8vnMv8AD/eavzg/aO+FvhvQ7BP7N8yaaS6knlVYvu/8Crtz/FUI0oqG8j5zhTC162KenwnhOmrbWypGkPlSyS7du37tegeFfFPhLQYY45LmMTyP/oqsn3o1/wBZI3+yteQeKtUvrWZLO2hbz1+5I275V/vV5r8VvjRqWh6bqei6Dcs1xfQfYpbpW+aOH+Lb/vV8pTjKpLlW5+jYiUMPDlR6b8fP2sPDHxO8SXOt68kieCvB8XkaXpqvsbVLrd/rmX+7uWvh74/ftWePPi14mmnub+4trCz3Jp1rHL8sa/w/LU/xI8XQ6ho6eG7CHyYN/wA/z7mZv7zV4zqWoPcTTwWyb3j/AIv71fQ5bl8YyakfJ5tjJThaMiDXvjJ4q85oZnbZ/vbv+BVF4d+N17Z3W+a5bLfK67qyNQ025jXzr22x5nzbWasi80mGVftKbVb/AGa+jp4XDOlySjY+TlWxUZX5j3bwZ8XptQmFyb/ey/eVW/8AZq9K8K/Eie/uGmS8k27l/d7q+QdNnv8ATXVra4kT/davR/APxKvLEJvmb/b3fxV5WKy5xu4HuZbm84+7UPqez/ac1v4b6lazJc3gtYdzvCr7vmavXfit+1emqaf4Pe2RY45r1ZZZPNbbuZfu7f71fFs3iiPxJqEWnxzcfe2q9bPxG8bPp+l6BpX2m4LWNw0+3zf4tv8AEteQ8JHSx9HDNpSpvnP1y/ZX+Muj61p6/wBvTbYo/mf978y/L/DXvPwv+IfgzSW/4SrVbOGSzXcqyNPtRWr8PvDf7bHifwHo722j6kyySffZvm3f3qitf+Ch3xyWzv8ARNK8W3Ahuk3RRrb7ttYxwmL2ggxObYaKP308Pfth/s1W/iR/Dd5qFvDcyT/6M0gXbGv+1JXpWkfETwP4igku/BviKzlRfmfbdb1r+Z7wz8Wvj34y1ppn8Q6ldy3Uv+rhT/vpa++v2Nf2nvGHw7htPCXjGwvoYm8tW+1W7Kzf8CrGthsdh4c9SzMMux2ExNW0vdP1Vm1r+0rUXP8Aq3ZvmXb/ABV2nwN8RSw+IvJuQqlW+RVrwvwH8RrbxhoMWq28yusy7lkjr0P4U6tdQ+JYXhdg6tudl+avBWInGpFy/mPezTDwqZdNf3T6A+OHiZvDHg6XXLi5W3tTbMtxMx+Vf7tfzQft1fFi8+M37Sni3xiniS4vIW1JrW1jaX5I1jba3lrX7ff8Fef2lY/hJ+yVcbtSEV3q0v2Ow2ffZtvzMq/7Nfz+XSw6lqCXN/c75vNZmmX5fM3N83/Aq/WsJKNajGbPx7BYb9/KZjw6bDI3/LRmb5v+BVLcaXc+Tsmh3L91mj+7Wva6OnmSp5P7tn3I0laVrpcEf7l7Zm3Ju87ZTqVPZyPoadH2hx7abMtr/o1ssifwf7NULjTX8vztnz7/APV/7VegtYpGzfuV2fwL/drJ1LTobdvMd1VvvP8A7tZKvzR1H9VjGRxmoaVM0e+ZGLr/ABL/ABVl3WmzRsyOWV/7ytXZXCosrJ9mZwz7f7v/AAKsDW7Xb5u75GX7rbN1dVOpI46lOH8xwWpaSFaV5k3N82xv4q5fVNJTaHfhv4a9F1PT4JIX2bS38bVyuuWe0SD+H+7Xo0ec8rER5ZXOA1KzmikL9fn+8tfVH/BMeEQ6T4xwxObmyPP+7NXzZrFvt+d4cbvlWvpj/gmlF5Wm+MRnObiy/wDQZq/V/B//AJL/AAnpU/8ATUz2eFVbPaX/AG9/6Sz5w/aTYx/tC+MJFlVf+Kju+G7/ALw1xm1Fb5E4b/brsv2kZU/4aD8YqzFc+JrsZP8A10NcarJu3u643ba+Lz/3c7xX/Xyf/pTPKxijLF1X/el+bLkM5HyId+3+KtW1vnX5ERWb+81YNrNJyiOrD/ZarsN0I8fw7q8s5ZRhE6WzvH2r8isW/wDHa1NPuJI5C8x3fwp89c1b3m1F8l/4N3zPWnp906/O83y/edWoM6lO51lneH78gX5l2+W3/oVXYbjzId6PJ833/n/9Brmre+jV1m87f/DV23vk3BE+X/e/hq+b+U4qkToo7qFVDmFkOzanzUkl87R8Iylk/wBW1ZC6hu/10i/u/wC7SRapDlPJf7qbZfn3bq0+Iw9maUkkednmbdqbd2/5agkvXVkf+Gqbao8jFEMaj/nntqvJqiOrOm1v4du+p5v5TSnEtXl1DIu/5vubU/hrImussu9Pm/2v4qbc3ifxt95qz5b7zJndnz8nzUe/8RrH3iLVrqHa2+bdJ97/AIFWBfSPJIzuGfd9yr99cPMu8uvy/wALfxVlyS7mPzMP/ZaylI1jyH0ZHHIpVJhnd/dp0dv9sm+SFYgqMzeZ95mqfy/LfyX++su7dv8AvL/DVn7Okcab+m5vlr4ipGXU/X8LjJR90zY4X2/O/wA6tt2r/F/u1DqFqkkbHfuZn2s0n3q2ZrF45IoXhVVjbcirVWbT0kkKJH838C1zxO/23LtI52+t5priUfdVU/76qjdWs3mKjpjcu75XreurOaR22W33v4l/u1i3kcbSedt+VflSuyMTixFaW5j3lq8ay7NvzJtfctZ8kbrI0MyrtrauoxGjb4eP7rVSnt3WTf5Kq+z7391a9Wjzch8lmFT2kiPTZNrL87bW/wBitjTlmmKR/d/vNsqnZ26Ltd+Qu1vm/hrWs49q/fbLfxVtKXszzI+9ISOF5mX7NM29X27q0o98J3vBIh/jWT/2WmR2/k/cSPCvt/2matLT7GGNWffu3fM7M3zVzyqFxjEreT5jCTyWLfN+72bamWzuVXZAjRJ975au2tq6xssbyKV+dV2bvmqS1hh+0M8/mAyOqqv+1S5uxfLzGdeRQtMjvHubft2/xbqhu4fJX54Wbb/Fs+Zq9I+F3wgX4kpfz3GutZm0mQKy2+9n3bv9oY6frXVz/so2lzEUm8dTlyc+Z9iGf/Q6+9yXwu434gy6nmGAwynRnflfPTV7ScXpKSa1T3R6mGyfMcTRVSnC8X5r/M8KNvBGqzP8vy7v9r/danRqkkqujx71+V1Va9wn/ZLs51Cv45lGO408f/F0xP2RLCMEJ45lGev/ABLx/wDF16i8FPEe93g1/wCDaX/yZ0RyHNV/y7/Ff5njCzOrfuduN3z/AN6tS1aZpPkf/tm3y16on7IumqF3eNpSydHFgAf/AEOr1p+zDbWgIXxrK5PQyWQOP/H60Xgt4jLbBr/wZS/+TD+wM0lvD8V/medaau6MJDuD7/nXZ/DXTaUz7kjS23Mz7flTbXT237OFrby+YfF8rgfdVrQcf+PVq23wXtrZdq+I5znhmEeCR6ferop+DXiItZYRf+DKX/yZl/q/m62p/jH/ADOftVS3l86Z1RP4Fb+L+GtnS7iazmaG5T915S7vL/hb+Fa1bf4YWkUgabUzKigBUaDgY/GrEfgFIp3mXVXw5yR5XP55r0KfhDx/HfCL/wAGUv8A5M4a3DGdTndUv/Jo/wCZd0CRJJNt5M2+F9jR7f8AZ+XbXYaDdPHshSaFW2fxfe/4DXJafoLWEm437SJnPllcDP51p2MjWYJYl3LZ3ZxiupeFHHyVvqi/8GU//kzgnwjnz2pf+TR/zPUPDd150my53YkfZ9/5l3V3mi6slqyQv/yzTam35WZl/vV4bpvje604Nts1YtjcQ+3OPwrdsvjbd2YBHh6JyDk75yc/+O0v+IT8ff8AQKv/AAZT/wDkyY8HZ9H/AJdf+TR/zPfdJuHVU4Xay7nZm3KtX9Nvt1usyIxPlbpV3fKrbq8EtP2jLyzgWGHwnCNvpdsAfw21ZtP2nb604TwdAQeubs5P47azl4Tcfv8A5hF/4Mp//JmkeEs9X/Lr/wAmj/me03rLJthhm3MvzPu+bdWLqG+OFvs20fN92OvS/wBmX9kb9r79qHwRa/ETRfB2ieHdA1KJpNO1XxBrTo14oZl3RxRRPIFypwzhQwwVJBBrlv2vP2af2n/2StD/AOEr+Ifw+0u/8PSXSWw8Q6DrLTQpK4Yqro8aSx52kbmTbkgbskCvk6fDOZ184eVwlSeIvy8ntqV+bbl+Ozknpyp3vpY4aeTYyWL9hePPtbnjv2338tzzzVGRZJd+4fJt+X5dtcR4qmRrP/Q0U7fl2t8275azLr40XVzE6f2GFZjkP9rJI/8AHab4Rl8YfFbxZpvw88FeEX1LWNZvY7TTbKKQbppXOFXnAA9WJAABJIAJr3q/hLx9SpupPCpRSu26tJJJbttz0SPZfC+cQi26aSX96P8AmcT4pkH2VoXfYNvyLs+7XlnjiaHy5cvs/wBrZX6WaP8A8EIP2u/Feix6r4h8deCdDubiP95pdze3Ezwj+6zQwshP+6zD3NfK/wC2P/wTO+PH7KtzZ6V8Y7eCGw1OSVNM1vSZFuLW7ZApZQch0YBgdsiqTyQCASPlsp4dzHOsx+pYGVKpV1tFVqV3bV8t5+9om/dvprscWHy6ri63sqbjKXZSjr6a6/I+I/FXnTzNsdgy/wDLRk+Zq4PXrOaSSWf7T95/vbfmX/Zr7z/Zo/4JCfHX9tnVb1PhJqCfYNNkSLU9b1YLDbWjSBiozuLyNhSSsasRkEgAjPefH7/g2U/at+FPhG68cad8RNI8U2dhayXOoReHlb7RBFGpZmEU/lmXAH3Y9zHoFNXjOFc2yzNVluKlShWdvddakmm9k/ftFu6sm03dW3Ir5ViKNb2FRxU+znH8ddPmfkv4gW1+yPsLNtf+GuM1C3jdnf5v9mvqn42fsd2vgT4d6l45h8evdvpypJ9mk00IJN0ioRuEhx97PQ9K+aNWt1Enku+F/urTzrhzOeFcXHCZlT5JyjzJc0ZaNtXvFtbp+Z5uaZbi8uqqniI2bV909NujZzY3qzJ90U+3abc53s3yf36ffRoku9EZf7tQLNMrK7wq7L/D/erzeb+Y8o0Ybr5WfZ91Ktwyfu/O3s/+7WXDO7ZjRFz975f4a0LV42j+RG3M/wB3+7WUo8poadlImVff/B95a19NLtIm9MfJWTYxwrHsR8j+9/drZsVfcqTOqq1R7TlLjT5zWsfOkKee6o6/drbsGhl+/wAHZ8jKtYtrD5hX7y/PuVvvfLWxp9p+7V49yqv+t3JXPUrGsaPLI17FX++EX/gVbumrcyR702qGTc/+zWdpSPtT59iM3yfL96tK1heRTCm4+Z/FXLUxUfhZ20cLItx2aRqs4mxF/wChNWjZr9l3JNCroy7n/vU6xsfMWONwrL/D81WWRIZsQosu1/7lebiMVGMbHsUcDy2Yy2j+ysnkptLPtXy/mqzHM/l73ePar7kkV6HjdsfI2/8Ah3fxf7tSx2ci/uXRtn8S/ery6laVSMYnr0aPL8IKzw2/32fc25G2/wAP/wATUUN1JJ8nkrs/jaP7tT3UDyRlIdq/Nt2qnzLTlsUhhZLaZd8n3fk+9XO46ndGnymRJMkkv2aa22K25Ytv96qrXjtIh6J8ys2yrsmnvCpd7mb/AK5t/DUE1nebfsxf733ZN+3dXauQ55U+WXu7lNVdZV2Pn5Nvy/8AoVSyRpqDFHRg+/8Ah/8AHqsrp+6Rsortt/e7aks7F5I1S2Rl27d235mat40+YzlGdPczZLGHc8RhZG2KqMq7W/4C1Tw6a8cjb0Vvl3bm+9/u1pNY/wCnEXMLB9n72P8Au/3dtTLpqSSb97Lu+626uj2JyuMfekc7eWu23cSblZk3fL/CtRrpaXDQv+73t/wGtqazS4uFTZt2vt3L/wCzUl1Z7pEdH2BW+Zl+61bRp8sfdOepzSkZsenvFIkMztkfM0kablX/AGaLrTdrb5ZWLr8qL/C1bCw7m/czbh/BItM1TS3WT7Y+35ovkbf/AKv/AIDWEo25Wa049DH8mEBXmf59m5NtWWvHtFSZ3+7tVtqf+g1DfF0ZYU24Vdrs393/AGaz7q4eZUmRGWJV27VraMvshVpx3iasmoIyvGkzIVbd81RLrkLbpk+/I/8AF975ayby6hmX/RnZjGnz1XuL54Y/kRlRv4q9ChL3PePJrUftG/JrUn+u8759vzRqtV217C7HuZP93fXOS6g6sPJf5mf+Kof7QkVmd34X5n+Wu+nPm3OSWF9pqdVHrB8xn+b5du9Wb5adea1tt+rfM33Y22/N/wDE1zUd9cou9JlG6ludSn8nY7/N/Ay1ftIxOmjl85QLuoah5ibE3Yb+Jf71Y+o6lNDGNn3mfa7b9tR3GoPIqfPg1l3DPJuM24/73/oVZe25h/2a6fvcoy81CZWXD4Zn+b5KoTXzzMrojMn3UarjR/aJNjuu7ZVZrErCv3vl3VhUrGjy2XxcpT+0TQ7/AN58zfc3J92hrhGbf/s/8s3qdbPbvd0Ulv7zVHJYPHDvRP8AZ+X7v/Aq5ZVv5jnqYKZXWT5flDbW/hX/ANmpqqjSf3fl2/71Sx27xyI7/KrJteSnN8q/Inzf7lL2nN8Jwyw/LLUhjV45G+66s/3aPMfzG3809ofMK/3dvystRv8AMqRvbbGb+Kl8XMY8vNIkW+eN9m3lv4qtwX0MaCEPt/8AZqztr2snnJMzbqfBNbNMjuF+X5V3fw1lUj7mptTlyzNi1ukZtiI1XtLeKOZnR9qN83ypWRb3HlyK7vub/wBCq5bzO27ft2r/AHa5PflHU9KjU5Tp9NndZt8cyqsjfOtdDZ3Dqv2lNqr93bu21xlnJ5cKzJN8rff3VvWd07Yh+VkjTd83zbqiXw3O6nI7LS7x/PR3+VfvbY62rPyVmCJ0+98yfdrlfDd+P40Zz935Vrp9Pjdo3S68zezLs+X7y152IlLmPQwsYyiX/sM0LDemwTfPFtf71ereHyj/AA7UxggGylxnt96vMrODbcLNM+Sq7drfdWvTvDqqfh+qKMgWkoGT7sK/bPAWTln+ZX/6BKn/AKVTPqMogoTkl2OHWOGORkR5NrbVdW/i+WiS1hGXh2t935f9qrMdvDIqfaXZFVvk2/N81L9l+0R7JkZh83zKjfw1/P0Y+/7p6uDomFfaW8TfOkgDbvljbau6snWo9sZebc+35tv3Wausu4d0zohYWy/KjMv3mrndQhSSN03sWk/vPXXE9Cnh4cxxOrKPnf5lhVNz7V3bf9mud1K12xb32s+3btX7u2uy8Q6PcrHs8tWVvm2q3zVz+paXuj85EZCyb9v92uqnL3YnoQw8eSRx11GkeYd6yOvzN/s1nTWsPlrsds79zru3V0mpW8LRv88YMi7vu/M1Zq26LHv+5tTb9yvSo82nY5a2HhIwJ7PdcbymPOf+GoZLVzJsTdhv4WX5a15LdI3Hk8/xf7VRzfOq7Imc/d2/3a9SjKK+yfP4qjCJSt4Z41+Xbtb+Fq1rH942x4VXb/Ev3apyRpHKZEm3H7q/3qksRtmZ0+9/eX71b/YPGqSinqdX4f2Dakb7v9pq7fQbySRkhuZlii+6rLFXA6Ldx+cYdjI7fLuX7y11uh3zqzJNMz7fl27vvVfLzR94iPaJ6JoN5ZxzvZwOr+Y23ds+aus8P3zNa/Zt671T5IWbbu/2q850fVHh2JGnzr8zbV/8drq9DunY/aXnzufd5e7burm9pynZRqcseU9J0m9eORJpkjQxxbdv3t1epfBfVLex8QLqVz8629rI6bU/2fl2/wC1Xiei6puaO5mmVP4XWvR/hrNc3WoXFhbIsrSRM0TR/wC7XjZ1KUsumo9j18qlzZjBnpXwl+Hfw31b4EXmq+OZlsbnxt4oZX1DULhVk8uNvvL/AHal+Aek/DfwT+1hb/D34deOYde0iNo23W7bo45N33a+bv28viA/hvwT4O8AaHrHlSQ6W1xKsO5fL8xvm+b+9Xt3/BBL9mG7+JXxmvPiLrM8kum6VbLcXjSP93b8y/8AfTV+aZdTxPsddD0uK5UJ81Rn64ftXyxWfwdsdRkhkhghs40SOP8A5Zttr8+/if4sfxZfXOpX7/JH8sUjNtVm2/xf7NfcP7X/AMZbKbwzD4Vhs4/skCHKyL95tvy1+YHxY8YXt14uuf32yHzWVo1Taq114/ERryjGEj53hbAzwuGlUqx5eY6K/wBF0HWLXffw27xxxfPJH8kjN/vfxV8sftHfD/TbWyuU8H3KyXk10yy/aLLb8v8AstX0T8PfEmja1cR2GqpJFa27Mtx5L/NJ/wB9V1Xir4A6b8RtJa80DSo7S3hRmWaZt3mVrl9SDnaZvnEeX3on5CfEiDxDp1vMlzDJFIvyvuSvKrrUPEmk28mxJAsn3pNtfpH4s/Zf0S88SXdt4i+zv5L/ACSSfd+Wvn348fB+z09Z30TQVeL/AJ57PurX2eX4rD/DKJ8DjMLiqseaB8k2uraxq1x5L/O/+1W1rHhXWNJtEuSi/c+7W+3hHQdJ1FLy2hmQszfu2ib5ai8Ua9NeW/2BEXasW3dtr069ZSlGEIniQwteL99nENqn2hfJ8xVK/frT8LyTXVx5KfKfu7qpWHh172++T5gybvlWvVPhT8Jb+6mS8e2ba33NtZ1pUqcC6EatSqd5+zb8Kbnxl4ytdBezkVrh9kU2zcq/7Vev/txfsK+PP2c/h3Z/F3xPpUlvol1PHBFeXDL+8kb7qr/FXa/sj+CX8L+MrDUtSso8Ky/M3ys1fZn/AAW2+DOuftE/8E1vCnirwlF5114T8QQ3l1tk+Zo/L8tm2/7NfIVakp5jGD92LPuJYPlyj2kdT8Qta1zTdPhH2l1X+5urc+GvxM+G+i6hDdaxp8dyyv8Ad3bdy/3q5Lxt8H/G0OrbNS0e4ETfKjSVe+F/7PviHxB4kisH02RRI3zs33a+meAwvsOac+U+XnjatOrFwpcx+lf7E3if9k74svC/gnV7HS9ajfb9jvkVWk/2q+7rL4d+CfHHhX/hG/Emj2895a2+yK6WBVZdtfkX8O/+Ce/xqXULbxJ8GXkhuYXWWJVb5m/y1fol+yjrH7S2m6vZeBvjT4Sm0u8jVVe6jf5bhf4vvfxV8bmmHrUo89KfNE+wy+eGxtK1aHJM9v8Agj4f13wbb3Gj/aZGs/tG1Gkb7te6fB3Xrb/hLLbfGzr9o2su1qw7XwTZw6YNQMLBJnVm3JuZmrT+C3jXSvCfxPx4gt1fT7G3mup7m42r5axqzbq+WhRp1sXCMv5kepXj7PKp/wCE/OL/AILjfteaP8dvjpZ/BPwL4hkuLHwDPJFetDuVvtkn+s/3tvyrXxdp9vDNdeckO/bxLuTd81df8ZtQTxt8cvGHieF28rUPFF9cQSSJ80kckjMvzf7tULfS0ZQ8j4Xf86r/ABV+y0qMaVKMI9D4PBYfmp8xGunpHhHh3jZuSNX+VWq9HYouUTzP91nq1Z2fkybPszOWep44Xabem4I33o9v3awre97p7dOjyx92Jl3Fq726u8K7Nvz/AMVZV5pu5XSYLt+8jKu1q6eaF45Am/5Pu7W/irG1a3SZmd0YN/zz3fdrKj/LIyqUeaGnxHHahZhWabewf7y1ja/HIsy/O23au9ttdTqVrtZ3Tps3O38KrXP6p532hneZnVU2pHtrspx960jyKkfd0OR1a1hk83ZwzNu+WuW1yx3MX/ib5fmru9QsvmkHyotc/qOmja2/j+Fa9GnHlZ5Nan3PP9WsbaOPZtr6O/4J02sdtZeMDEhUNc2Xy9uFm6V4brWk5UnY2N/8X8Ve+f8ABPq2a2sfFYb+K4sz/wCOzV+s+EGvH+F9Kn/puZ6fC6tn9J/4v/SWfLP7TRkX9oHxkEGc+Ibr+H/poa4Rrry/k/ir0X9qC2mT4++LZht2nX7k/wDkQ15xIuJN7pk79tfF59H/AIXMVzf8/J/+lM8fGSi8XV/xS/Nj45ts2+FF2t/Dsq1DeddzrhaobXjX5PmX+9up0M/zbHh+X+GvG5ehz/FL3jbsbxPlLx7l37srV9dSDK3kurN/B8n8Nc5BN5ce+F+W/hWrEdw6yMiblSiXxcxEpcx09nqTzYhhRd33d1Wf7eeNVSba235a5WG8mjP2aN9p+8+2ntfbRlNpP95qfNy/CYVNzsIdaTydjurFv7tDapthVIdvzfNXJLqgaPyZoP8Avlqmh1J2k+WfAZfu1rKRhyo6dtWTeuHwrffpn25IZG8jbtk/vPWJHqXnSLC6KzL83mVMrPIymbbt3/w1EpFRj73ul+ab94+zafn+bbVdmfyf3m1X+9/stTlL58t0wP4d1P8AJmMj7Id/8O5kqPaGsYlCZdq732qf/QagmtIpMfxbv7ta32Hy1Xjcyt95f4qa1n0TKg/x/L/DWPOaRjy/EfR0djbR3BedN+35fl/iqa4tfMhHkw427tm5fvVYs0hZfkhY/wAKfxNV1bdBahIX2/xOrf8AstfGVJe/7x+k0zG+zpDGk6Bkbf8ANteo5Le2jZ/nYpv3bpPvLWpcWPzbN7Kny7d38VVLuPaqI7r95vlb+Ks5RudEcRymDqASV3869ZPn2/L8y1i3sMZ/49oW+Vf4q6a6s0XY/kyK7fLu27lrLvLV1md3XZ8/8XzV1U/e0MKlTmj7xzF5azec2yHe2z7u6q0lpc28iu6LtX79bdxEjXDud37uX+FflqL7G8m9N7Hd/EtepRqS9lZHgYiPN8Rm2du/2j9yiy/N95q2rG3ufM2Jux/dVKdpeioyvOnlp/e/ire0fS03LJsVQ392nUrHPRo9ypZ2O21Fy9s3zPt2tV6x02GRWx/f+833avx2aSK0MO6VY/mRm+7WhY6TMu534TZuVW/irnlU9nA3p0485mNCkTI8KeU33fvblqxbR3LSfaUTMq/8tK1rjSTI3kum3+8q1J/Zu1fsyI22P7v+9WMqnNE3jT989g/YH+E+qfGT4n2nwi0LU7e0vfEmuWVhBdXgcxxPIzKGfYC2BnsPy61+l0//AAQ68IeBZJV+Nf7amgaAt1fvFoLPpscRvIlxhmE9ymJPmGY0LhePnOePhH/gkfJNYfto+BRbStFIPHuko7RsRkNMVYcdiCQfUGvpL/gs/qOp3v7eviG1vr2aWGz0jTIrKOVyVhjNqjlUB6Au7tgd2J71/VXh/i+KcxyvKMly3G/VacsPWqykqcJybjiZRsudabr5X0vZn0GGnj6lShhMPV9nFwlJvlTek7dfU4z9tf8A4J+fGP8AYo1y2k8VSQ634b1KRl0vxPplvIIGYE4hnDDEExUbgm5gRnazbW29D+xX/wAEyfil+1noFx8UPEHiW28FeBbNn83xFq1sxa6VFYu9uhKLJGhXa8jOqqcgFirKPftN1HUfGf8AwQi1C5+M9/MRpmoCLwfcXczB5I4r6NLdFJUlgCZogORsTG5QMr7h8Q/iH+xz8Iv+Cdnwv0r44eCde8RfD3VtH02GCDRJJZEa4Ft5w+0OksBbLiRsEAF0zsBUY9jMfETi7D5Osuprnxn1qphXVp01LmVNKTnCnKSh7Rp25G+VNS8iK+dZlDDewir1faOnzRSd+VXuk3bma6XtufJ3xy/4I5614d+Fd78X/wBmT496L8S9O0iCWXVrWySOObEYDOIGilljlZUJYxlkbA+XeWC15b+xJ/wTy8d/tweHfF2seCPiBo+jz+GUt0gtdUhlYXc8xYqrOgPlJtjkO8BzuCjZg7h9ifs8/t3/APBO/wCDlr4kP7I37MfxHlvZtJa71fTdI0qa5jlhgDESTBrqVYo13ENKV+VWPXoeW/4I5+Ph4X+Bv7QvxL0HShBc6bAmq20AdRGuy2vpY4wAgAwVIyBjBGFGOZnxh4iZdwnmNSupqrSnQVGpWp04TkqlSMZRnTi5QstlJWunffZPMs7oZdXlNNSi4cspRim+ZpNNJtfM8z+Pv/BKX4Vfs9/CTVvEXjL9t3wvF4w0jTFuJfC01oqmeYgEQRhZmnO4H5W8nnglVXJXS+HH/BGGS28A6b46/ah/ad8O/DxtYto5bHTJ40eSMugfy5XnlhUSqDhkTeAR9418UX/ibxDqviObxhqWt3U+q3F615PqMsxMz3BfeZS/UsW+bPXPNfof4k/bV/Y1/aV8G+GfCP8AwUr/AGffFHh7xXp+jxPYa59iuY0uYJo0P2yIxlJRHKyFwpSRAOVdsmvf4jh4k5Dg8PTpY2piOeUnVnSoUXVglFcqpUnZSjzX5m3KSVvn2Y5Z5g6cIxqud2+ZxhHmWisox0ur77s8I/bI/wCCXvjP9mL4ap8dfBHxS0jxz4Ie4iifVNOjMc0IlJVJGVWeNoi21N6yE7nUbQOapfsVf8Eyfij+1noFx8UPEPia28FeBbNn83xFq1qzNdKisXe3RiivGhXa8jOqqcgFirKPbP2qf2fU8HfsG33j39hL9pnXtd+Dl1qqz+IfCNyFk2EyGOSVZvLSZI1k8rfbOuDnzSTgVo/8FGdR1Hwr/wAEwPgj4Y+FN/N/wh+o2liusTW0zMs8gsxLGkjbRkGXznIO354x8uR8vnYPjPibHZVhcvw+Mi8RiMTOj7aVLknSjCHO1UotKKr9FHWDutbmNLNMfWw9OjCqnOc3HmcbOKSu+aL05/LY4D43/wDBG/xDofwxuvit+y58cdL+KNnpiSHUdO0u2X7U5TaStv5EkyzuFbcYyVbA+UOWC14l+xF+xZ4m/bY+JGr/AA60DxtY6BLpGhS6hLPf2skpcqyxpGFXGAZHQMxOVUkhXI2n2X/ghp4i8f2H7Xt14c8OT3DaJqHhm5fxFArHygsZUwysMEbhKwVScHEjgHkg+0f8Eyrfwvo3/BTn47aF4DuY5dGWHUTaup3/AHdTi4VyoO0FnGBwcDlsBqvN+K+LuFsHm+XV8Sq9bDUYVqVbkjFpTnyuM4pOHMt46arV+TxOY5ll9LE0JVOeUIqUZWS3drNbX7dzitH/AOCH/hnR7XT/AAz8X/2zPDmheMdTT/RdBtLNJVkZmKoIvOnhlmyRjIjXnIGcZPx/+0/+zZ4+/ZP+MF/8GviLNZz3tnDFPDe6dIzQXUEi7kkQsqsO6kEAhlYcjBMHiv4k+OfGX7R1x8TfE/iW6vddn8WLdPqNxJucSLcDZjPAVQqhVHyqqhQAABX1l/wX0WJf2lfB5SCJWbwOpeRYwHb/AEy4ABbGSBjgHgZOOpr6DKcZxhkvFmCwGa41YmGLpVZNKnGCpzp8kvccVeUbS5fe10vozsw1TM8LmNKjiKvtFUjJ/ClyuNnpbda21PhKus+A/gCb4q/Gvwl8NobI3H9ueIrOykhG75o5JlV87SCAFLEkEYAPIrk69C/ZL8Y23w//AGn/AIfeM7y1E0OneMNPlljO77ouEBI2kHIByPcdD0r9JzapiKWVV50PjUJOP+JRdvxPdxLnHDzcN7O3rbQ+sv8Agtb8f/GOgfF/Qv2Y/h7rVzoXhXwz4btpX0nSZGtoZJpM+WpVCAyRxJEEXGFy2OvHSf8ABJr4i+Jf2nPgL8Vf2P8A4sX0viPThoAn0KLWJHn+ziRXjMYZjlVSVYJEAIKNuZcHkeW/8FwfAmp+Gv2zv+EunsnW08R+GrOe2uNp2yPEGgdQTxlfLQkDoGU45ye4/wCCFmh3XhnU/ip8eL6wkOnaH4XS28/Y2JH3NcOi9iQsCkjkjcvTPP4FjMHldHwGw+JoRXtIwpVIySXN7d1I3ae/M5txbve10fHVaWHjwhCpBLmSjJPrz8y6976HwNf2N3pl9Npt/bvFPbytFNFIpDI6kgqQehBBFe7f8Ey/i34E+Cn7aPg/xr8R5YoNLaaexe/nKBLKS4heFJmLA7VDOAzArtUkk4BB8O1vUv7Y1m71f7OsP2q6km8pCSqbmLbRkk4Gcckn3r68/wCCJnwY8D/FX9qu98QeONFi1FPCfh9tS021urRZYBdmaKOOVt3AZNzMnB+YBgQUFfrvHeLweD4Ix9XHRbp+xkpKLs/eXLZPWzu99Ut9T6TN6lKllNaVVacrTt5q36nuX7Zn/BLT9sb46ftG618U/h78cNMutE1q8WWxi1fXLqCTTYtoxCESN18tDkLsOSOSMk5yf+Cq+saf8EP2HPhx+yN8Q/Hv/CWePIri3vLnUpZBJLHDCkqtMS4LhC0nkxk7WdY2JJ2sp+f/ANpb/gqD+2J41+OGr6r4X+K2s+E9L0zWJotH8P6W4gS2ijkKqs4A/fv8uW8zcNxYABcKPoX4teLf+G8v+CRt7+0F8Y/DMP8Awmvga9aK28QW+moJLpo54UkddoXZFLHKBIq4QSRFgvyKo/FqeU8X5HWyCvxFKlPC06tOEY0kozhOcXGnzvlXNFac6g0m+ktz5aOGzLCSwc8a4unGUUlFWabVo301Xe34lP8AaG8Y+Kf2MP8Agkz8M/h58MzL4b1zx6YrjXL/AE7fBcsssRuZiZAQyyMDBGTnPlqUGFAA8Z/4JJ/tO/EzwD+174e+H954x1K70DxfLJp2paZdXcksRlaMtDMqsSFkEiIN4GdrMOhr1P8A4KM2t18Vv+CZfwG+M2j6Qy22j2ltZXqxK5FuHtFhyck4XzLYLls8svPPPzl/wTD8B6l4/wD25/h9ZWFk8qabrH9qXbqpIijtkaXexHQblReeMsBznB97I8FleN8Mc4rY6EXUnPFyqtpNqcZTtq7u8UouOumljswlLD1chxMqyXM3UcvVN2+7Sx5l/wAFvvhPZfBr4qfF3wZonh6HTdOkvIb7TLO2hKRLBcPDMBGvQKC7AAfKNpAAAwPyc1SHZJ5P3jtZv92v2I/4L7+L7fxv+0H8WZbW2EK6eLHTi43ZkaBLdGY5P94EcYGAPcn8idWs3+d3hYqv8X3d1fkniPiMVVWTzxH8SWCouV97vmvfzfU+T4ldWccLKW7pRv8AichdW7qrP8zCqDWrwr8nylq3Ly1ePbsThqo3Nk24Mj/x18BGpynyHLzGfD5nmM/zYX7+2tO3bC70+Yf7P3qhjhS3kZ/J43Vo2sbybfJ/h/vVEpdzWnT5i3p8aeYqOGbd95dlbdnbvN8k0P7vf8+6s+xj43+R977+1/u1taWs21Y4fm2/+PVyyqR5fdOynRiaFnbv5Zm8lnZfm2763rGPzoD/AKM2xlVmjaszT4UVW2fM29WX5q3tJimaREd8fPtdWavPrVj06eHizY0exdVSHy1Xb9z5vvVsafb7m854WQx/Kn93/gNM0XT0jkRJnYln+Rmeui02z32I3cbn+X+Jlb/eryfrXNLlPZo4X3SPT7VFU/udki/5+Wr66em3Dw/My1YsbFIUe5+ba3y7m+XdV+OxSTc+xldVrgqVuWR6VHD+03MtbPbh34T+L56sJbzKzJ5Lf9dP4WrRktbOOON33L8nz7aj+zzRwo6OyfOy+W3/AKFWMZfDJHVGjy+6Vvsszfvw+xtq7WakXT7byw7/AMTfIy/e3VfWGSSG4/fLsk2/8BqW3s5o4/Jhh+Zvl+V/vVtyzluXGnGPxGNcaXZ3UhdNuxfk/wCBVBL4fh2h7lGLr95W/u/w10v9myKyWy/embdu/wCef+zTZ9Hf7QZptpXZsT/er0aNP3QlGHL7pzVvpaW8nyBi/wAyurfw1ZtdMRYfOSGbK/cjX7zf7Vbk3hmGNVcPt3ff2vuqxBpFtbru82R/Oi2szfer0adGPLoccv5TmJdNfKx/bG27fvTfM1VvsDrtmd/njbb/ABfe/vV2N/p9s80Lw/M2z+Fqp3mlwxx7HRt6t/E1dPs+U4ZU/iuc79khaMo6MvmfM0i/3qh+xJZw+ZCm9Gba3+zW9JY2fmK8MyuG+5uf7tULixdG+S552fNu/hp+z15Tn5ZSkY8apJ/qX3OrfdVf4aLqD9233vv/ADqzfL/s1d8vyZAjvj+H/Zpt3apcKrwuoZvvVlKPKZ8pzerWvlt5zp87feVqwLyaTzR/cVN23Z96uk1SGa3Xf5zFt+1ZG/hrmdUV9xMz87vurXD8J1L3oEEl9MzNB5yoW/26zr7UGVim/wCT+9uq55L7Qj220/w1n3lmdzJM6/f+7W9GW5nWw8qnwkMc3nKju+9Y2/ufepjXTr/rtzFvuL/eqw1nNbqqPbMqyf3n21XmtU3B0h2/7NdUa3N7sTqwuW82g5r55d/z/Pt27qZJNNtVJudv8W6kkXyzvdF2L91dlQv5fzyQpt/i2s33aqVafLofQYfKfcigEyecr7/9ylb98u93kZm/ib7tV13tG3nO29vuMqfLtq9Y277Tc/Nt+61ZSrRjG5p/ZREtm8bbPlG7+89Syae7J86YH+z/ABVct7fzmRNkmf8AZTduq7b6bNMrzvuxGn/fVc0sRp8Q/wCyeWJhyaCkipvfYzfcb+7TJtNjjVvLfjf87f3q66z017pf9Tt+RW+b5qq3mjoJFhhhVW37fuVyfWoy0ZwYvK/d0OVm0hFXG/afN+df9moJLH946P8ANt+VK6W4sUhm2fK3yt/urUP9nJuV5HXDfLWlPERj9o+VxmFlGRzFxZvHs2Q8fdfa21dtM+ywrGqFGb/Z31vSWMKzcpsXZ/y0+7ULaei/OkzFt/8AF91a3lW9w8ephzCm09933Nyt/DvqNbPdcLsT+P8AhrZvLHdI2/gf3qguoXVQibU/iqeaXui+r/zFOOF/vwu3y1djjmkkZ/MVGZ9v+ztqGGHH3/m2v97dWlbx7ZEh2K3ybk/2qr4YGlGM4ljT1aNkTZ97761t6azqph8njeu3/aWsqG12yLsTaWf71benwv5a4hVd3yo33a5vhO+j7ux0Oko/8c0hTf8A6pfl2112n2sO3zo9yvu2vufcu5a5fR03CF4YV2b9svmf3a63T45o1CK+8bvmZvvMzVxVI80z1cLU5Ym3Z2G79z5efutukr0fQURvA6orBla1k57HO6uB0iHy7dZXRW/5616FoMUY8JJDEgKeQ4VVHbLcV+2eA0OTPsy/7BKn/pVM+lyio5VJX7P9DlFtYZdlsjsZNy/u1/harUtrcx/uYfm2uzPtermnx3MM3k3SK39xdvzLU0MPmW/mb921/u/d/wCA1+DU6M+Y3o1pRlfmMDCMqJDbSTIzfeV6wdcs/Ojd3hj/ALvl/wAVdlqEbi3e1RFb/ZVNtYOoWMLQoX+Uqm3/AHq6PZ8p7mHrfaOI1q3fzGuXtlES/L97+Jqwr2zf54fmfd8vmL91a6zWo0jiWF3VQ277v+98tc/q0iRqzvul3Ov8XzV2UqMuU9aOIiclqVrc2qsiQKQzbfuVk6hD98OmHX7y1011++mf5Nv+zu3ViagttbjyfIY7vl+auyEJR6CqVqUTAuF3Sb03CRl2pVFo3t/4Gcs21/71al9a+Wyqi7D/AHaosqBTcv8AIy/fVf4q76cbHyWYVOb4SKRPs+7em7d/Ev3qLWP7Pdb0Rm/2lpxkfyxvTa7fw0kW6ZneE4X+L/arsjHmifN1q3Ka+lx+ZcBPO2qz/Mzferp9HkfzfOR/Kdfvsv8AFXK2FqHHKbXZflVfvN/tV0elwvHjL7H+6zK3zLUVOaRH1jlOu0u827fJT+LczMtdLpV88dwr3O3/AGGWuN09XjxsdmH93ftZq39Jme4VURF+XaF+f5t1cVSXunXHFR+yd5oeobbgJc/JKvyxMvzK1etfs/68mn+JvOmm+aO1kVI2+7N+7bateG6LdbtUTem54flWTf8A99V6R8I75G8WQwncr3D7P7rV5mYU51sHJHfluK9liozJvil+z/4q/aE0HSn8Kwx3OoWaNbfZY38z5d25Vr7K/wCCPfhbxf8ABT4b+K9N1jQ9Qsrp7uGGeGb5fl3fw/7K1t/8E8vgq/wZ+JjeNvFOgSXelWSyXpdf3mNq7q+gvhh8eP2ZvjNf6v8A8Kp0a5l1+/uZGubSCJlKFW+Zn/2a+FqqnGhyP4j2MZWqVMU3yc0Opyv7TmuTLvR5pHMMS72X7vzV8RePrHTZNeu33ybppfNlaT5lVf8AZr6n/aG1z7VNeW015JB5bMqKrfK22vnpfDqatp5mvIcmR/8AXfd2t/u15MY+yZ6EfdgeWaPq1h4f1R/sd5u/jlVvu7a9L8G/H+wtbaW1v9YmSwVdu2SX+L/Z/u1538WPhzreizM7wSYb51WNN+7dXz58T5vHmk+IrR7aNgnm7v7q/Kv8S16FHDupLmiefiq1CPu1T608XR+GPE1r9s8MeGLi5E0TM9006+Xt/wCBV8+/Gi38Z6Mvnf8ACt45rf7rSQorMse35d1eY/8AC5PivJJ/yEpv3O7fJHLtX/d21et/jl8YLjT/ACZpFltmfbtuk+WRa9WFPFU5RbR48vqM+ZRZ5d8QfiB4J1Czlhm8HtFPDuX5vlryHVrVNcvPs+j6a23eu6OP5q9u8beGbDxhqj3mq6VHEq/xW/8AFUOh+E/Dekx+Ra2y7YW3MzfeZq9ehW9h70nqeFisJKvP3YnK/C74B3OpXiXOqwthm+f+FdtfSfh34Z2FrpsSabCq+Snzxqv3q5bR9SsIY1sLZIUaP7qq/wAzV7L8IY7PXLT7HeXLJcbP3TRrt3VrWxyrQDD5b7HVfEdd8MNP0qz8Jprd4lmj2rR79z/vG3N/yzr9A/2ePCuifGj9mnVPAvifzXsLu1aN4WXcsn93/wAer4kh+Ad3D4fPim5ufJtoUVmjb5VVt33a+0/2H7rxLd/DwaR4ZsxPA0amRi/yxxrXz+Pjy1YSPqsBH2mAqQmfm7+3l+xHqX7OPxWhvPGmiTP4U17b/Z18vyrDJ/drX+Hf7Bt54i0+z8Q/C7xbD5Eksb/Z5Nr7mX7y1+rv7Q3wR8GftB/Aq68DeObBrnZFIbWRl+aFm/ir8vJvg/8AtG/sR/EpLHe2peGI7pnsrqNmZo1/hX/gVaVa05YWNSn7zj8SPNw2GpQxLo1fkz7P/ZV/Z78beEL63v8AxRCv2aGJfK8mBVbd/FX0p4u0nwlfNYQvokbz+asUU0i/Oqt8zfNXzf8ABX9szxCvhmF/E/hhjFJF/C+2SvY/hz4i1LxvqFtqb3LIrbmit5G/1a15H1irK66yPSxGBlH4djtvHsGmeGNBR41by1i3RM38TV8lfHzxpeaP8KfiH4hsLzyn/wCEXvILeRn/AOei7d3+z96voD4+eNg0Y0RrnZ5ab9sf/oNfMX7Ukltp/wCyj47165mbz5LCG3WFU+WRpptu3/vmuLCR9pmsEo7SOmph/Z5VN1Ox+b2j6HMqok1y0h+zr5s38LN/erdsdJhaEQwzKqb9m1k+Vmqa1tUt5gjurKv97+9WppdvMrfvkz/FtX/0Kv2Bw5ocyPicL7vukMOg3nnCZHjDxv8APCr7W27altdPmhV4ZkjWRl+61bsciSSedNbfL8q7m+9/31U91pKLbvMjqNvzIqp935q46lOctz16fuxOKvLab7Q6WzxqV3Km6Lc1Ys2j3KyPNI/m90X/AGq73VtPSS4e5b5Hk/1S7Nq1kXuhw27M6QzHd8zt/do9nLmsKpGEtjgNc0e5jdkmhZP4tqvuXbXK32mv814m4rv3L/s7a9U1bTkmg87fGsWz/dZv96ub1bw35kf2b5Wdfvssu1V/2a7KcYxPDxVP3vdPNNQt5maR5pvut/q1VfmX/erA1ix3L8nzLu+f/Zru77Q5rWE7Nu1k/wCBVgappaRskyIzp954d/8ADXfTlE8StG3unBatbTqr7Eyy/wATfdr2/wDYQt1gsPE+0/entCR/wGWvKNc092X92jbdny7V/wDHa9j/AGJovKsvEeEA3TWpyO/EtfqvhAkuPsLbtU/9NzOzhdWz6nb+9/6Sz5h/acsIJfjT4qk80gtrlyCAv/TQ15VqkOdyJCv3fk+bbXt/7RNktx8YfE+4DB1u4G4L/tmvI9es3Hzuiqq/xfe3V8Xn8eXPMV/18n/6UzwsZ/vdX/FL8zBTfJ1enq3k53puWmXcflNs8tR/u1CjSeXj+Fq8XlOb2hPDJtk/c8t/Aq/xVYW4dlHybf7+191VrdnG7/fqVZHjbKf7vy1X2Be0LH2ieTYibfm/9Bpv79tvbb92mpbzSbZjDll+XdV6Kzj2h33D/gH3aj+6YyjzFaFXZWfzty79tXbW1uZJFcBXFW7DR0kbfs3LWvY6WzfIkXzMn8NVKQombbw+Sq/Ju/3qt2lm8eX6Lv3bv4l/2a2LfQ0bY4tsszf981etdDMa7/vMzf8AjtYSlKUjanH7RlwwwNh3hb5fl21Yt7abd9/buTbt31t2+g7pPnDJt+ba1JJo7wyb9n/AmrnlLlOunT9oYzWc0J2dV/2aRYX2rDtU/wAX7z5a2X0vy03vSeX+8V3s1Xd8vzfw1hGpI19ifQS6S/nSpE67413IqrVlbV7dWCIoHlK21vm3NWvNpf8ApDvhWeFPnbd95qia32SbH2qF2/N/er52pT5T7Wn73xGLcW91IiQwzKh+9u+9WfNa2wxAkK5bcqsyfxbv4q6G+0/zriLZbKPvKzM33WqpeWqbhBsVvn3IrP8ANWPvHZKMOQwLu1mWPZ95F/8AHmrK1COFmX52+Zt3y/w1v6pH5m7bcsPLT+H+9WXdRpNN9z+Hcy7fu10Q92epw1OblkjAlhMl9smfaF+X5vu1DJayWTbJHZyz/dq7eR/6SU8lcb9rrUa7Ps/z/wDHx/Bu/u13c38q3POlHmJNNt4bO186H5tzbtqr81bmkw20kyTJDIyq+3b92sqzWaNwUG6Hzd27+LbXRaTNDHdJsRtirv8A9n/gVRL93qKnH2kuU09L0n7UY02YRv4f/iq1V09422Dy9v3VXO6ordkuFH2ZFbcv71fu/LWlbxpGqeTAqhdq/N/D/tVwyqc0T0I04RGLpqSfP5PzfwK3y7qhbT0t7VbmH5dz/wB/+KrrW+2N/tL79rrs2v8Aw1U1Jd0zJbPhG+7H/dpUypxj/KfTP/BKnTb7Q/2u/hnrkd2UbUPHOnKqoeVj8/y2B+oZgfY1+nP7dP7TX/BOXTf2gL74b/tefs86jrfiDwzDbfYdZ0+xV/tFvNAk6ozpPE5CtIw8t9yjJIxvYV+TX7M/xc1T4CXvhb42aLpVrqF54Uu11S2s7wt5U8kEhkCsUIbBK9jXm/7e37Y/ib9uH9pjX/2jdV8J23hj+2Ut4E0ay1CScW8UMSxRh5GC+Y+1RuYKgJGQq1/RfEs8s4WoZDWlSqODwSt7Ks6U1OclUk+dKTs+eS5bWtLyLzKjToV8PUkny+z+zLlabd9/mz7m/by/4KOX/wC1LomnfBr4UeCU8G/DbRCn2LQYkiV7to8rC7rGoWFEQgLAhKqcks+F29D+xv8A8FMPC3w8+EUn7LH7XXwyPjn4dyDy7ELDFJPpsWWfy/LcKJlEm1kberxHJVjhFX8in1jU7iRkS8nH+y0hWmT39x5w/wBMZzs+VlnPy1MvE7g+pkEMnWSuNKMueLVdqcam/tFU9nzc9/tX1Wj93Qbx2WPALD+wtFO697VP+a9r38/lsftl4v8A+Cn37Kf7PPwz1XwT/wAE6/gBceG9Z16Ird+JdVto0e0YYCuA7zPclQX2q7KiM27DZZT41+xx+3T4X/Zx+D3xe+H3jTwdqutaj8RdIMNnfWt5GqpO0U8TGXeMqMXDvvG8kqF2gMWH5ZTa7etEiveS7lb518w/LVO+1u7ijdn1C4Xav3vMLM1GD8Q+FKeW1sG8qnU9tKE6k54mUqk3TkpQ5punzWi0rJWVr6XbZjHHZdSw8qbouXM023NuTaaau7X0Psa1urmyuY72zneKaGQPFLG2GRgcggjoQa/QOD/gpp+w9+0x4O0Ww/bv/Zn1DUvEGhWSQR6zpQEwuW2gSOGSWCSIOwLeVl1BPU1+EF3q+oSycajcK23+KU/40+DVbq4fbLeSP5e07fNO2va4i8Vcl4ndKeKy6pCpSbcKlPEOnOPNZStKNNaSSs07jx+f4THcrqUWpRvZxnZq++qXU/aL9rf/AIKSfB/xT+zzL+yR+x38Grnwf4PuLhGv726dIpbiIP5jxCJC5+dwhaR5GZgpUjnNVP2N/wDgph4W+Hnwik/ZY/a6+GR8c/DuQeXYhYYpJ9Niyz+X5bhRMok2sjb1eI5KscIq/j3p/iG+lVzPNKBu3LtkNWo9e1BVd3v597fLuydy15v+vfB8ckeVvKZOLn7XneIk6vtf+fvtOTmU/NO1tLWbRxf2zln1R4f6s2m+a/O+bm/m5rXuftp4t/4Kf/sqfs7/AA01TwV/wTq+AE/hvWdejIu/EurWsavaMMBHAd53uSoL7UdljRmztbLKfEv+Cd37bnh39jz4z+I/ip8RPC+q+IDr2gT2jNY3KCX7Q0qThn8z7wZ4wGbOVDFgrkbT+YsXiO9LjbfOB5X3VJ+Wr9r4ouzMkM08hjblW840Yfj7hTD5RisBLK51Fibe1nPESlVnbbmm4c3u9ErJdtXfOGfZdChUoPDt8/xNzbk+13y306H1g2vW7eMT4n+wv5R1P7V9m84btvmb9m/bjOON233x2r3b/gpD+2d4Q/bZ+K2hePvBvgzUdGg0rw3FYTR6nPG7yS+Y8r7QnAVWkZQxOWADFUJKj86rPxBfLCqfaZWKtuVo87v92tnSdcaILcxXM7L93czHdur2cX435RUzTD5hUyuTq0IzjB+3dkpqKldezs9Irc9iPEmGxGIhWdB80E0ve72v08j3OgEqQynBHQivJbHU5JV3797bs/eP3q1bXXJHZ3ikcfL/AKljtb/arpq/SWo0/wDmVt/9xl/8qPapZ+qqv7P8f+Afpr8Nv+Cnv7NPxi+D2g/B7/goR8Br3xdP4dtxHaeKbUrPPORwHbLxSxOUWMOyyN5hXcwHSsD9qH/gpf8ACS8+AN7+yp+xJ8G7nwP4W1KXGq6nIyQz3cDDEsXlxlzmTbGryvIzMgKEYNfnXJr1zD9xHT91uX95upW8QvHbur+bhvl6/KrV+d0fEvg/D5lDEwyepyxn7SNL61L2Mal786p+z5U76pfCuiPIisrp1VUVN2T5lHnfKnvdR2/Q+6f+CZn7c3wb/Yv1rxPefFP4SXWsSa3aRx2et6RDDJeWwXO62xM6AQyEhmKsDlBlX+XbxXwf/bY1T4B/te6j+078J/hzp2l6dqWoXXn+DYJilt9gnfc1qrKPkIwrKwXaroCE2jZXyJLrBhCwvPI27+JTVJtRu8PDNKy7X3blb+GvWreNXDVTH4zF1smlKWLgoVU8Q3GUUrJKPs7LTqrNbqzbv0vFYGdWrVlSu6iSleTs0vLofq/rf7bH/BIT42anJ8SPjX+yLrVr4nv2MmqiwtgUlmJyzl4LmESsSTl2QM3U15h+2v8A8FLPC/xu+Dlt+y9+zl8HY/BPgG0ukkljJjSW7SNvMSMQxDZCvmZkb5nZ2CnI+YN+bOpXF3DGq211KZPvbdxw1ZN1qF+gbF5KdqblVXPyt/drzMs8S+FsDi6OK/s2tV9i1KlCpjJzhTa2cIunZNLRXvb11POhiMuwtWM3CUuXWKlNtRfkmunQ/TP9h/8A4KPeHvgP8LNU/Zq/aM+GMnjn4eapcb4rFpI5G09WJaVFilG2VGkCSBdybH3OCS1eqt/wUz/YY/Zl8N6q37Cf7L13p/iXWbGSBta1iJIhakjKEs8s8kqK4RjCCiMVHPFfjBquo3IVsXs/8K7mc/erntT1e+l81GnlX5mZN0h+WujHeI3B+b4+pi6uVVEqslKpTjipRpVJK3vTpqCTeivtd6u7bM8Vi8sq1pVJUZe87yiptRk+7VrH1j8UNOk+MVpq8Hj7Vby9m1ydp9TvXn3TzytJ5jSM7A5YvySc5ya8ok/Yk+DskPkG+1sKTnAvY/8A43XgOp6pqjsVGpXGxv70pb+tc/f3eoxK+7Urgtvwi+c3zL+dfT5l4ucK53VjWxuRxqSjHlTdRaRV2kv3e2rNcTneX4uSdbCKTStq+n3H0jJ+wN8D5Dk32vD5cYF/H09P9VUR/wCCfPwJLlzfa/z1H2+LB/8AIVfKt5qd7BIGTVrovv8Al/ft9386z7zUdUZj5eoT7P8Aanbd/OuP/iIfAf8A0T0P/Bi/+VnE8zyR/wDMDH7/AP7U+uD/AME9vgUW3f2n4i4z/wAxGPv/ANsqcP8Agn58Cwwb+0PEBI6f8TCPj/yFXx02p62zB01af+7tadv++utPh1PW5mXfqs4+f+Gdv8ab8QeAv+ieh/4Gv/lZUM0yd7YKP3/8A+y4f2D/AIKQFSmoa9kdzfx8/X91VqD9if4PWxBhvdaGBj/j8j/+N18f2upapt+fVLn5f4vPb/GtvTNSv5Zkht9TuPm+ZlaRvm/WueXiL4fx/wCaep/+DF/8rNlmmU3t9TX3/wDAPrCL9j/4TxcpcatnOcm7T/43Vq3/AGVfhnbSiWO71UkDABukx/6BXzNo93rB/ez6hK3zfIqzN93866LSrq8KrNJdXH93b5priqeJXh4t+G6f/gxf/Kzrp5hlstsKvv8A+AfQ1v8As8eA7crtuNRO0YAa4X/4irkHwV8IW5UpcX3y9jOvJ9fu14Xpup6hLJ5qX0qFX/e7ifmrdtr2984+TeyOW+bazn5a5ZeJPhwnb/Vmn/4MX/ys7I4/AvfDpfP/AIB67F8IfCkKqoluyEGF3Srx/wCO1MPhh4byCZLrg5H70D+QrzDRdRuNizXV84f7mybPzVeivLg2kkUch3SfLiRi1Yy8TPDfm14Yp/8Agxf/ACo6oYzB8vNGivv/AOAegN8LfDTsrmS63L91xMMgenSpF+G3h5ZFlD3GV6Eup/8AZa4EXUjSR/O+V6tuP3f7tT2M8zxn7I7ff+75h+7SfiT4bf8ARL0//Bi/+VG0MVhmrqkvv/4B2zfDTw65O6S5wwwVEigfotTL4B0FAMedlVwrbxlR7cVyOlw+YiXL3Mof76qzFt3/AAGtW0S6eNXlimX+Dcw+9/tV1UvEfw4n8PDNP/wYv/lYfXMPLel+P/ANqLwHoUTBgZyQcjdIOP0p6+CtGBDP5rkZxvYHGfwqlawySSLsw7N95VX/AMeqza25nb7Xbo6Fn+RWFdtHxB8PJ6Lhymv+4i/+VjlicNGP8Jff/wAAnTwfo0b+ZHG4OMZ3Dp+VKfCOjkY2OD/eBGf5Vet9DF5aCLyxtZvvsdu2nXGkBLpI5rgfd2qqr97/AIFXUvEDgBfDw7T/APBi/wDlZzrFYSX/AC5X3/8AAMs+CtEIUBJBtORgj/CkfwPosgIlMzZILZYckDHpVwaWzXRS5QlNv9/azVQ1LSr+3iUoiDe/zLn5WrT/AIiBwFb/AJJ6n/4MX/ysyni8FF/wF9//AACB/hh4YdizLP8AMCCPMGDn8KZcfCvw1chRLPd/L6SgZ+vy81T1KwnRmeAzbF/5aSSL92svU9MnSNo453lMm1Ym3D5l/vVMuP8AgGGv+r1P/wAGL/5Wccsxy2DusMvv/wCAbI+DPg8MH33m4HO4zjP/AKDQfg14Q3tIj3alv7sq8f8AjtcbNBcIxRbqVmba33Cq7qpXVreBiIWbePmlZnLfLXK/Efw/5uX/AFdp/wDgxf8Aysc8wy6muZ4Zff8A8A7a7+AngW8yZGvVJGCyTKCf/HaoN+zH8OXBV7nUyCcnN0v/AMRXH6qskqhBeNGv3U3OfmrY+Cv7K/7Rf7SviePRvgz8M9b1x3fynktY3WNWX+JpG+VVrN+Ivh7y8z4cp/8Agxf/ACsn+2MsjK0qCXz/AOAasn7Lnw3kIzd6qMYwFuk7f8Aph/ZV+GRJb7TqmSck/ak/+Ir7C+DX/Buz8Xbq3g1v9o7456f4ZhcsZtH00m8uFX/eX5Vr6D8Of8EH/wDgn9ocMaa/4p8ea5IyrumbVBAu72Vf4a8yv4ueF2GdpcPU/wDwYv8A5WaU8ywtX4MI3/Xofl5P+y38Nrn/AF11qhOc5+0pn/0CmSfsp/DGTGbnVB/u3KDP/jlfq/cf8EQf+CdMg8v/AIRnxdDuRv36+KnZt396vOfGf/Bv7+yjrDk+EPjX490hPu7JZYp1rmXjP4VPbh6n/wCDF/8AKz0aGYUlLSg0fm/P+yH8K7mQyy3msFj1P2xP/iKYP2PfhQCWN3rBJOSTdp/8br6q+Lf/AAbwfGrRklvvgh+0Zo3iaBf9VZ+IEktblm/u/L8tfH/x0/YH/bc/ZzkuE+KvwZ1qK2t5f+Qlo+bu2aP+9ujr0YeK3hnV+Hh6n/4MX/ys9nDYzDV95cvqjXX9j74UJ9261f8A8Co//jdSw/sl/C6AbY7rVgM5/wCPtP8A4ivBIJ71L86Wt5NFKv34Z2dW/wC+c1p2IvlYb9Tuf725pDWkvErw6cdeG6f/AIMX/wArPZoYJV43jP8AA9xP7L3w2IIE+pjLZBFwnB/74qZP2bPh4gws+o4/6+E/+IryJEktlBW5lLSfc2yP8zVoQT6nGDDPqE25v4d527a5ZeJ3hx/0TNP/AMGL/wCVms8vqxdnL8D04fs3fDsNkSah7j7QvP8A47RL+zh4Clk8xrzUx7C5THt/BXlqGaSTyLy7ddr8t5x3VQvJrpTsS4lx6+Yf71S/E3w3f/NMU/8AwYv/AJUeXiMOqbbauesS/ss/DSZy73Gp5Y5P+kp/8RTJf2VPhlKQxutVUjptuk/+Irxa4vb6RnH2112t8+1jVSW6vZGb7NezIP73mHbTj4neHD/5pmn/AODF/wDKj5nF1sHTV5UE/n/wD3F/2TPhhJy95qxwMf8AH2nT/vik/wCGS/hbgD7TqvAIz9rTv/wCvFI31G4VVS9uA2cblkO1qe1ver88d9M5X+HzDWs/E/w6pxV+Gqf/AIMX/wArPKWOyxy/3Vff/wAA9n/4ZH+Fe8SG41UnGObmPken+rqB/wBjf4RuxJudYGRggXif/EV43u1JoykM83zbmSTzD8tZd42o5WP7bKHb7zLKf8aqn4n+HU3/AMk1TX/cRf8AysbxeVf9Aq+//gHuo/Yx+EIGDdawRnJBvE6/9+6kT9jz4UIjILzWMNjP+lx9v+2dfOEs9/aXYZdUnQ7vutK3+NSf2pdqWlTUrlpG+bb5p/xreXiT4eKOnDdP/wAGL/5WZRzHKnLTCL7/APgH0jH+yR8LovuXmsfX7Yn/AMRU9r+yx8NLRNkdzqh92uUJz6/cr5xsb/VJbjzprm4jVvmT5zXRaHHeTRPFPdyOVbP+tO1qUvEjw7ir/wCrdP8A8GL/AOVl/wBo5Y/+YVff/wAA98sv2fPAdgu23m1D6m4XP/oNaEPwi8KQLtWS7PuZV6+v3eteUaIbidQq3TN+6YL++KqrVvaLcX1orPcK5eMqPMOdsi1nHxG8OZO64ap/+DF/8rG8zy2l/wAwq+//AIB6LbfDzQrU5jluD6hnU5/8drWttOtrTTxpsW7yghXk84Of8a4eyiu4lSZp8+Z9zaK7DTVdNAVZcKwibJJz681+l+GfFvCecZli6eAyaGFlChOUpKfNzRTjeD9yNk7p3122PVyrMMFiak1SpKLUW9+mmmwg8Naech3lYHHBfHT6AVYGm26xrEC21egAAz+QrJWULue2D+rw5/8AHqtFQkQfcERfv5NfnUfELw7Wi4ap/wDgxf8AyszjmmB6Ul9//AJxoNiu4K0gDMWI3DGT+FVbjwVotyhjlEpBOSN/f8qfLa3Lzec0BdF+bcx27awvEdrKJAyySB4fRvl2tTXiF4dXt/q3T/8ABi/+VnZSzLD20hb5lm8+EfhK92+d9p+X7u2UcfpVKX4DeCpozG9zf4Jz/r1/+Jrltbnlt4HNsSyjcrLuK/8AAq898Q6tco7RR3Eqsv3VEx2tXRR8QPD6e3DlNf8AcRf/ACs64ZlTteKPXpf2afh3KBvuNT4IIP2peo/4DUcn7L3w3lJMl1qhDDBBuUI/9ArwaTV76NvJhurj5fveZKfu1Vm1TUmkXZdSfN8zfvD92uuPHXAD24ep/wDga/8AlZlWzanCN3G/zPfH/ZP+GUgO6+1fLHJP2tM/+gVBL+x/8KpQQ17rPzdSLxOf/IdfPV5rF8JHb7fOuf4vNP8AjWdd6vqjReVLqE+xd3Kyn/GtFxzwGo/8k9T/APA1/wDKzya2d4KMbulf5/8AAPpOX9jn4UzIEbUNaGO4vI+R6f6vpTof2PfhTbqFjvdYwO32tP8A43Xypca3eyMTHqVx8v8AC0zfL+tOttc1adkji1ScH+FhM3+NJ8ecA/8ARP0//A1/8rPOeeZZf/d19/8AwD6xt/2TvhfbYMdzqvyrgZu0OB/3xVyH9mr4dwjCz6ic9Sblf/iK+Y9F1q+df315cNIv8X2g/wCNdDY6zdzXCma6kVdm5VaQ1jPxC4BTs+Hof+DF/wDKx/23lslf6svv/wCAfQ0HwE8EWyhYbjUBtGF/0heP/Hamg+Cfg+3IaOe9yO5mX/4mvC4b+/jjEiXbyt95f3x+WtTS9YmbMM1wyurbnXJ3Vzz8Q/D9b8OU/wDwYv8A5WdEc2y/ph19/wDwD23T/hh4e01w8FzdkgY+eVTx/wB81raboNnpWowanZySLLbyiSPLDG4fhXjlnq108CJFM7H/AGWNeqfA7xbpug+PLK/1WTbZxyrvMi53L/FWdTxE8P1C3+rdN/8AcRf/ACsl51l8XdYdff8A8A+lfD3/AAUV+Pfhf4fXPw50bTfDkdpd2pt5bo6bIbjYVKnDebgHB9Kwvgp+2h8VfgBoWp6H8OtF8PQtq+BqF/c6c8lzIoOSm/zBhT3wBmvvD4kftGfs1fFP9kbSU+G0Vkuv6IlvLp6vZLHI0kf3scc18taf+zB8bvht+2d4V/aV+NN3aDTvF9x5ljamQPujWP8Au9F/2a+fxniT4Y0EpLhalLT/AJ+JW/8AKR6WV5zg8x5qc6fI77b3fTseReNP2qviZ48uWudatdKUs+4Lb2jqFPtlzWIPjZ4x3ITDZEIcqhhbb7DG7pX0n8fLPSjq19NBaRrKZd8iLEFIj3bvSq/wk0q08QrNNFpKKscW7aYw3/fVeLPxZ8K1HXhKl/4NX/yo+mp0/aHg9v8AtI+MIbt7648NaDcytAYla4sXYID/ABKPMADe9ef+LjaeNdVOr61pluZD0WNCFAznAySf1r7T8QeKvAvgnVEsLzTLfUXKM0qraqyw1xl74i0DVll26RaM3zPueMbYa9DB+KfhhUhePCtKP/cVf/KjzcbKlRnyyhzHyK3gHwizMx0SLLnJPOemOtZ158IPCV4csbpOuPLmAx9OK7f9pP4xSeHrddG0bTHeOXc3mlwBXxr8Q/iDrN1qRtri8m2yMxz5pK7q9GPif4cyjpwvT/8ABi/+VHnzxOAo6ypJf16H0Bc/s8eCLh941HVY/aK6UD/0Cq4/Zn8AgY/tTWMYxzdp/wDEV8j6n4x1J2kha9nP+15p/wAa5a88ZaxPOiR6hdeWzbX3TN/311ran4i+HFf/AJpen/4MX/yo4qmdZfTdlSX3/wDAPubRf2cfAeh3K3Vvf6rIy9pbpcH8kBrudCsbfw7fLf6cmHUABX5HHevFfhx/wUB8P/sw/CbRfDPg+K0vboWbf2neXdos5mZv9+ty9/4Kk6N4n8FC70qO1h1Bfv8A2e3Cttrkn4k+HUXpwnTf/cRf/Kj0qeLy1K9op+v/AAD6D1L42+OdV0X+wLme3FtkYRIyOn/AsfpX05/wS8/aiubT4lR/APxDooZPENrJBpF7ZqQ0U6RvIfO3PypVWAKjIbHGCSPx/P7WfirxL4qPiPxD4gvrmeWXazXU+EZf4V219u/so/FJ/AHxL8HfFVSD9mMVycNgESQkHn6Oa+jyvFeH/HvDmcOlkUMLUwmHnVjOM+aXMoykrWhG1nHXe60sbYephcdSnToqz/qx+hPin9rrwf4B+IF78IvEOpLb3bRbYmml+6u7b92vP/E3jLSfiRpMvhW8mWaxVvkkZfmkb+Fq8E/4Kha54Y1r4Xr+1F4Pv47TWNNv4/tUa/6yaFvvKteN/s2/tOX/AIkuIEu9TuJ5mdVlWR/lb/dr+Rlzyj7WD92R61HD4eUOWovePqr4E/s9+LU8bPNo+pXFxEt/t+zzfd2/wr838NfUd5rGq+GvDcOlXmiRw3bJuna3Tay/w/LVD9kb+yNb0K31Sa2VZWbczRv+93f3mruPjSumqxSKzb5YmX5W+ZqdaMY0HJfEeVWlKOMVM8K8X302pXn/ABMkaTb/ABNXhX7a3iC80f8AZ1ltoYvJs9Y1GGCBZIt3mSK38O7+7X0N4k0220vRvt80bDd96T7rL/s18b/t2eMLzxJ4g0TwBczSS2Ol27XirDcbo1kkX5fl/vUcNYf6xm8ZS+yXneI9nl7ivtHz5a6RebW/fRhlTd+8StbTYXbZDbP+98r723/2anabazW80XmzfIz7WZU+bbV+G33XSuNvnNL/AH/4a/WZRhL3T4vDx93UntbeFbd32eUy/N++/irSW3ddqP8AeZfn8tvlqGGzcRs83lojP8ke6tOxsy37lHX5tq1PsY/EejGXL7plalpcLbpZtqN/EzfN/wACrI1HTXZfOSaTf/Ev8K//AGNdj/Zb+S0I3RFflaNvmqCbQ5mt1mFm3zJ/EnytWlOmpS0OeVT7J51daKjQO/kwzL8r/M+5mrB17QftDNc71j/56/3K9LvtFhj+eEbxIu1FVVrm7/QfMhZUtsKvzN5la06f2jzcRV908m1vQZomaaHb++2/Nv3ba5bWLV4VdEds/d3N92vWde0N47OW58narPu27drL/wDY1xuqaK8Lf8ey7Wbc8a/3a6adOMjyKlM861bSxHCR8zNGv3mf+Jq9S/ZCs/sdrr8ezH7237YzxJXIavo6bXR337m+SNq9B/Zjtmt4tdLoAWnh4H0ev03wjv8A6+4W/ap/6bmdnDUYxz+lb+9/6Sz5v/aAsUk+K3iQgr82sT7lK/7ZryTxBpPkyH522V7v8b9O874k+IZCmVbVLgHcvfca8p8TaS7Yfzm2/wAKtXxnEMf+FvFf9fJ/+lM+czDm+u1Y/wB6X5s801Sz8ubfsU7qghtWkVnxjbW9q2kvGzb3Vd3zKtUo9Jdm2P8AL8n3q8bl5feOMpw2TyZ+fH+1VuK1eGVJH3fd2otatjo825fITen+1WvY+H0umWaZGT/Z2/dqOX3dC5HP2ukzSSbI9zbf4a14NBmk2pD93+NWrpNN8NqyB4flRU+WtPS/DbztFcp87L975avl5/dI+E52z0Py9qeSw/2q2bfR9pXbw395q3F8PiOHe+1/+Bfdq9H4bm83Yib41/5bK/y7qylzco4mJY2tzCqf6Nv2/NtatjTbFJF3um5m+Zdv8NaFnod55vlodqt9/wAz5v8AgNbmm+F3VVZ7b97/ABL/AA1hKMzppmRb6G9xILxE+RZf4aW60d5GfEOP9n+GuysfD77Um8vCw/M1X/8AhG7U/f8Allk+ZGX+7XLU8ztpy5ZaHmFxpEMg8l7ba33vmqhLo26Rnd1G7/VMv8Nejal4XLSP8mX2feb7tYmpeH0t1SFId7b/APdrKPx+6dMZRl7p7akMLSB5tu5fuR7Pl/4FUFxbv9q2743iZfnZfvVsyWr21r9pSLa6syr538S1W8794k0MOz5NzfJurzJUT7SMTGuIUt5DDN8rSfMu1fvL/tNWdf2Kecr20ioNm7dJ/DXTahbJcLvSzZhIm5v96srULW2aNYfmZ1/h2/w0nS5dUKpLlic7q0c0cbpZzL/e3L826ufvo0C7PO5b70bV0lxZ7l3ui7du1N3y/LXM+II0s2MyfIrN95VqfYyUrHFUqR+0ZepTfdm379332/u1Ta4/5Y+cp3fxU/Up90jSQp+62/Nuqrat5KfvnjxsVUjVfu/7VbxjynnSlzS8jYs2maNfnyq/3V/hrZ09khh3I7Jt2sjN96uZjvNzeS6cK/8AC3zVu6Sv2p/JRN38XmL/ABVjWjyxKoyjI6zTbxGhS6mm27m2NJWlDqFt/qfmdY93y/drnLOR4YUSE4TYzbf7zVaW8ttxvPJbzW++y1zcvvanVzSNj+0N0LIlsyuqfd/vf7VUby4cR75tzr9146zrjUpmZXeZY23bWjZ/++ai86ZSZpp1x8y7d33WojGZUqkuh7D4eYN8F5GQYzpd1gf9/K+c2uEdlTfsl3fd+8rV9DeF23fAt2kO7Ok3e73/ANZXzVqV1+72I67Nu5l/2q/fvFayyLh6/wD0CQ/9JpnTn7k6OH/w/wCQ/ULhGVjN5jOr/wALVnX+sRhWSxdQn97+KorjUIUVnRFV2+/uesa81ZAqv/e+7X5DCjzHy0sRLk5TZt9SkuNrufmX+791qbc30PmL/pkjt95l/hjrnYdYeOZk879yz7U/u1dutQhmhDw7gm37tdlOPKYSr8pozXUdxGN+3O37yv8Aeao47qaJWS2fZtbayt/FWTDqW24fjejf3m+7T11Kb5od+U/vMtb8suU4albmlc2luEaTZ0H8G5qsLfTKPJR9jf3q52S+e14++f4Ny063v/NV/wC8z/8AAqcpfZFKp7v946iPUsMUd1fd9+rNvqTzM/zrsh+6q1zUNwZG8t3Yj+OT7vzVo2d88jb/ADFwybdy1zVJTN4/zHV2OpbpVCXP3k+Tb8taul6pt2qjybl+bcqfLXJrqCWsMUe9f/Zv9mtXS7yZV3vMrbfm+Vfu/wB6uKodtH4jt7fVJmhT9yoT722N9rVpLrW+3857zczOqvIyf7NcVZ6pDcKyedtVf+ejVYbVHMaOkzMzfNtj+WOvHrLm1Pao1OWB2C6ptVLmNP3jK3zM1Mk1TLM73O/7vmqtc8uvPDZ/67BkTZ/lqkXVpolb/pomzatRGnIupUgdCtw8krI7ttm+5SrdWcarvm+dV+dY03Vi2987xqjvIpV9v+1t/vVJb3CXEh+fzd25Xm27dyrUezI9pD4S3NdJdq800rNE391dtYV800sazW0jJ95XVv71bWyGaFX37hGn+r3feWqN3bvHC7vtZG2/u4/vVcY8vuhJcxzupzX7R/Y3O9933f8AZrm9Qt/mmSaZtq7WRW/irsL6F4W87yZMMn3v9quf1zT0kk8t4d3+0q11UakY+6jklR5tZHL6havDJshdn/2v4dtYmpfKzTbPmX5UbZ8tdRq1r5e77u1fvVgatMgGx+iv8+3+KuuNTmmOOH5o8py19bzbmf7rfwKy1n6hbO8bBPmffu+aty+UyD/U/K3/AI7WXf2TyK3zso+9XbGXumNTD8pjzK8ch9KW1t3jbfNHt3fNVjyUbO/5v4qljtQzbHfedvy1pzcpz+xn8RY09X+byUYN/eb7tdDpdqlrcRbE+b7rMv3aztNtUh2edCwbZu/3q6PS4Ukj+eFW3fcZkrz61aB0U6Muc1dPhRdjpu3fd/2d1dDZxzRsm+RQ+z7ypWPYrCIvJy3zfc2/w1sWcfyMrzM/mfNu/u15sn73M4ndGPL8JrWavHH8k33v4mX+KtXT1DK37rfFGnzMv96s+xaa48uFNp2pt+X+KtSxV2/0ZwuPuurVjKXu8x1R980IUfa8Lw7yzbauTrM0cUybc/d27vu0Wq+XiaaH5fKbbHGn3lp+n2u0lEhb7/3mrl974oHSuWOjkWbPzrVUdEXds+fd81WrNXmZJrZNjbf3sci7lqOzhmhQu8KuJN33m/8AQa19Lsd0iujtsXa77f4V/u1pCXvSOyPN7L3S/pdq8W3y4Y9n3ZW+7/3zW5p+moq/vk+78vy/3araLps1uqrNc74t7NLuXduWugtbNJpFeJFcQ/LXp0o+5eJl8MinHYvJMuxP9Z8vzVp6PpH7v5+rfcXft27atLp6RhU3q5X7kcK7latezsvL2vMjb/7u3+L/ANlrrhKNMcpSlIrf2Z5liNm1U2NvVv4akt9JLfuYduzbu3N/erYt9N87fNMOI2+Vl/ib+7tq3JH9ojX7TtRdi/KyV3R5Kkipe7H3jnV0Pdcb/lZvl27vvVV1DR9sgR0ZQrfvWb5lau1hs7b7Q0yWfnPG219r/wAVMutJdpi8f3lX5GZ/l/4FWsfdkY1pLk948x1Lw7H57hE4X+Ff9r/ZrDvtO8jbbTOsI2/uvlr03UNB8qOW8dP9ptqfe3fxbq5bxBodnJL8/Rv9VtrlxFSPwnnxlCUzzvUNNk8yOKGNVbc3y/e3f7VTeHfh7r3izWo9B0S2a4mvH8q1ht4mkaaT+7tWuo0LwFqXjTWLfw9pWiXE13cOsEEdvFueRmav2S/4Jgf8E0fDH7Nnhiz+J3xLsYb7xdcRLJBG8S7NNVl+6v8A00/2q4oyVSrGETnx2NpYWlJs+f8A9gD/AIINaPdaNafEf9ryBnE0Ucll4ahfDNH95fOb+H/dr9B7X4f+Cvg54XTwV8NPB+n6Ho8UW2Kz0m1WJdv+038VeoMqbCBXnvxm12DRrAtM+0fxf7Vc3EK+rYHT5nzeBrVMXjo855n4x1+3tsrEGl2/8865STxBCzKdi7G+b723a1ZXiv4laJBIYUv4dzK37uR9tcRJ4uttVulvBqXlIr7dqv8AK1fkmI9mpn7Fl2DoRpe8z0m78SQiEfZrjLbf9X/do0/xZpzolvczNE7My/N92vL9Q8bY02Qw3MLlpV23CvuVVqjp/izVbP8A0bUvLzHL961b5WX+GuX2nLC6PVjl9CUfiPZriaCKY3KHzpP+WSxvS/20n2WS2uYVlST5fJkTcrf8BavGbHx5r3h23vtS1XWPt8Mcu6KG3i2yQru+7/tVtW/xOmvI5X8hlVov9HkZvvf7taU6s1Exll8Ho3cpfG79h79i79oBoj8YPgjpbX7RNEuraOn2WdVb+80f3mr4u+N//BB3SNHvH1X9mT43yXULK3kaD4si2tu/hVZl/wDQmr6/1r4qPafZg6NdPJ8sse/ay/8AxVTQfEabT1uEnuY5Ujt2ZPJl3MrV6WGz/HUbwvzGdHDTwsuejOSl+B+O/wAbP2Vfj9+zfNFD8Y/hvfaYm/Yl9Cvm2kkitt/1i/LXDXFuG2wwzKV/jbf91a/dSPxponjrSx4M8c6VY6lpVwn+n6feRK8Uy/8AAq+Mv22f+CS3hHVLCb4xfsS6kbcKjPf+A9Vus+d/e+yP/wC02r6TA5thcauSXuz7Ho0c/qxfs8XHT+ZfqfnrdfuZAg8tlV22M33v/wBmse+WG4bdvVdr/PWz4m0/VfDuvXPhvxVpVxpWoWcuy60++t/Llt2/2lrHutn2p0f5D/E38Neh9qxljcRSr+9CXumX8m50toWHz7mbbu20v2G5WbZM6qyp/f8Alar9rH5URTbhl+6396plt0mm3o7bf9patS5ZRsfHYyn7TmRX/s879iW+3zNvzU5bPdCzJ8qr8qLHWhDZzbQ7wqgXds+bczU63ieNj5MPyyfP833t1Epe0PI9nGNjEvrHy43mcNu2bVWsXULV418wR7WX+Jq6y83rMd9tyzf71YOoW94uoSvsjxvXb83/AI9XRHl5tCfZ+6c7cH7ZiZEX+9uZPmZqqLHuk+f76/M6/wB2tK8017iR7nzvm3/xf+y1TbT5oZGm2K5k+5/drpjUjzcsjj9nIls43vLhXd2/dsu1Vau40m3RdtztU+Ym35q47SLV47hHkh2uv3o67jwrb7m+0yfNtT/Vt91q1jL3NCffOi0m1RWG92RV+Vmat/SVeQN9sdfJVtiLN8ysv+zUOhafDN/pM0zLu2t5ez71dDp9i8sf75I/OZ/kj2fw/wCzWkTjqxl8UR9qrRshfzHTYu+Rf7392us0Nd3h5FBPKP8Ae69TWHp9j9nkV5oWVlba3+0tdHZIY9OVGIYhSCVOQTzmv3TwPi/7azCX/ULU/wDSoHu8Nz/f1V/cf5ozUhmW6L7/AJpvvtJ/6DVuNoZo1mgRVf5vu/8AxNPhhWGTzpkm+58u1NzbqfpNjtdrxU+f+JW/hr8ajT92585HFDLiN7m3Xypmf7y7Vb+GsfXLebyXd3Zm+6jKn3a6C+V7aFXl8tP+eUcaVgeJp3s7d32KAvzbf4q3jROyOYe9Y4DxUqNayOlyzLv2/wB3c1eYeKrpJLr50ZVVtrxr/DXpfi5PMhlSFI96/NtX7q15h4q3sxn+6rfM/wAnzM1dVGMInTDMOWNkYd5JuXekzRvu+b+KoGum3K/3V/iaq1xdXKyOm3dt++1V5fOZW+fC/e2q1dUfdicWJzKUpDru42yM6PGRv+9WPqU3mSedvZTs/v8Ay1PfXDyDy0fDN9xttZl8z/Km/d/e2/xVpKJ5dbGc3ulZZvLk+cKy/wAVT6XfbZmk+b/4ms+6ZJGCb1H+ytLZ3CfKm/b8/wB3+9WUo8xx/Wpc2h0+mz7ZCiOx3fwt/DXQafqSRxgvz/erjrW6SOPY/wB37v8Au1uaTcfvPJeeuWUeVs6KOI/mOr0+4hgk3w/8Cratb7z5vOeZmZfvfL8rVyNnefMmblSrfL/s1uWOpOZE+dW3LXFUj9o9CjWlsdj4fvPtEfnO6p833V+9XQWerfZ5A6PIybNqN/drhtPupvkwY1Hn/PIr7WX/AIDW9Y6ojM0cm3zf4JJP/Qax5Ym/tOaNj6W/ZF8Vf2l8QtK0HW/EO+1k1SNGhV9sX3q/Xb9r74e+H9Z8J+HvEtkzEeFrWJrWRW+WNWjxX4a/AnUrmHxxbTWcMnmNcQtF/F8277y/3a/Yz4i+NPFWtfstaD4q8T6fOsGsWq2cDN8v7yNfl/8AQa8PN8LX9leEeaJ6GT16EsbBTlyyufLXxx8VQ/8ACSBHeSWW62/dbdtrqfgvZ2Gn2MmL9T5lvuZVavF/id4sfT5Gmd2edpVWWaR/mXa33a7X4V+Mkh8M/b5rZYUZGRmZtv8AwKvz+o58vKfqdFx9pZnOftAePLDwrqypYXmfOn2Iqxf3v4q4m1+MGlaTp8t5fpsiji2v/emrjfj58WJv7cub+51KF910yxLs2syr/FXzr42+MlyrN9muZPMV2bdv2qu6vWwdGXLFI8zMqkOaTNb9pD4wQ61eSXXnSS7Xbyrf7vkrXyz4m8QzXl083nf8tWZVb+Guk+I3jq/1dX+0zSOzP88m771eYa9rgW48lNufup/tV9Hh6fNLlPgMxxyjLkLPmXOrXC2dr5hdn27q9a+GvwF03UrEf29tt3b5vMk+ZVrkvAdvo+kWcOq6leR+dJ/D/dr0HS/FifYXSG88pN23cv3q9KVSNP3IbnnUY+0lz1TE+JX7H9zqelteeGNYhl2/fhWvErj4K+PPDd43+gSFVba7R7mr6x8N+MLaxhR01Nm3L86t93dWlofiDR7fWIRNp9vMjfM7Mn8K/M1XTx8oR5ZRMsRgYzqc0JHjfwD/AGcfiR8VtcTw94e8MX15eQv88KxfMv8AtfNX2bf/AAw+I9/4Lj+Evg/daeJYraGwi+XJimi2rIMD0CPXef8ABLv49+Fda/a41WbVbW1SG4s1gt2ZFVV2r/dr074NXmk/8N8C/wBQt0ktD4x1N2jLfKV/0gjn8q/Y/CXFUa2U8SrltbCTv6ctQ+k4bjVpUa8m/s6fieB/Hr9jX9oHRf2XX0a78YXGqPI0dxq/mbmdo1+7GtfL3wV8Val4B8UR2E/mW81vOq/MzfKv+7X7+fH7SfDHijwf/ZWj6bCkFwu+VY13bv7u6vxT/wCCj/w3h/Z9/aKtNbs7Nrey1iVtyqvyLIq/3q/nn2dCdL2dM6KebV41Y1JS8j9LP+Cf/wAZH1LS7W1Fzsm2f6xpf9Ztr6f8Va/ZeI/9PuUVHZtyyN91a/LT/gnv8YodWkhtt8aOrbEkWX5q/QbRdal+xw2d75yeXErfvPutXz8uajTlCZ9Th5fWK/tS18WJIbXQYbaZ98HzNLtTd/3ytfml4w8RW3jLx9rGtveb/Mv5EiZm+VY1+VVr74+O3i59P8A6hqt5NthsbCaVVX5Wb5f4a/OHw/fvJZwwzbklm3Ovyf3m3fNX1PCGFipTqng8RYiPtYUjbs2hkhV0RXZk2vIv3Vq3Y2r28wMKLI397f8ALtqG3unbZNv3tu3eWv8A6FWto9vux5033l3fc/8AHa+85InjUakeTWRoWOn/AGrEyOy7XVvu/K1aEGnpIzzpMp3bm3fd/wC+aZp9q8iv+53N8rJGzfL/ALtbFrZzKzFE/wBd8m1U+7/u1py+4aSrc2sfskFnpb/fuSqI3yqv+7/FVmTT3/2m2pt2r/7LWhptil1tmufluG/iZ921au29vJJbNM6ZH8G5fvVrTjDYx9p7vMzjtQ8PwyMUhdYi23ytyfN/u1z2peHZrhZofs27b/tV6Hc6a9xJ8ltuib7+75tq1Tbw3NHMvkosKr8ybauNP4TmqS5o+h49rHh3c7w52uybdrfwtXJa54Z+8iJ5bq/9zbur3LU/CrpcSvsb92+5ZF/irlNU8JpcSPC9hI7796SN/DW1OPvHj1qh4xrHhHMZhRFxJ/EtdD8EtKGlDVI9pBZ4c+nAfpXSah4ddt1sk0e6N23KsTU7wxpLaWZy2QZQjFG6r1r9M8J1/wAZ5hX5VP8A03M6+GakZ8QUv+3v/SWfP3xe8NJdeMdYmhdhNLqMhTC/7RryfxN4T2tvuZmO776qvy19K+P/AA3Nc69eTblbzZ34H8K5/irzPxR4UtmWV3tsiRq+Nz+N84xX/Xyf/pTPnMfL/bqv+KX5s+ePEGjuZm5xt/h2VQt9Jm3K6IrN/tf3a9Z8TeD0VWuURh/s1zDeE7lZPkTf/stXhSic3MjK03R52Vk+X5v4q6bS9BRdruiqdu35av6LoM7L89tt/urXT6P4bdpF3plF+9HWXvS90rmM3R/CP7tXg2oWet2LwPbQyb02uqxfPtX5lrp9F8N20atvhkd/7u77tbdrocLTBHSSIt8zxx/equXlkZHBx+Ddyslmm5Nu7cy/NU9n4Zm270g+X7u1V/ir0q38N/a0byT8kcq7vk2s1aVv4Pe4X5EYf7Ozaq0csJEylM860/wS/wAvyNvXb/q23bq6LTfDKK+zydzr8qrJXoOm/D37ORMlg3zffmb5t3+1trX0rwKjXUk0ztt+780X3m/hrOVM2jUlE4HT/CLlhM9mw+XbtX7tXJPA9z9o2THYrfLub7q16NF4LS6VEHyGN/uq1adp4HsxGLZ7NijJ95q5qlOR1RqRPINS8EOqv9mhWVfK3Ksf8TLXNat8Pf3J89PMk+83+zX0JdeBbYLLM8MYeOL5WZPmWsLWvA8MjP8AOq+Yu35Yvut/tVEqfMbRqfynKQq6xqiSbW3tvaR/lWoJN9psRLbeJmb95G3y/wDAqJrh7ebHzGJlZU3fdX+7WfcahcybtiNlX+f5/u153LKJ+gx7k0cfnTK77c7mZmV6rapZw+T/AMfKxBv73/stTx3bvvezEKPs+X/d/wB6o7i6hffLc2yod6ruVt22q9nyrQupU93lkc9qVm7QvvSMoybfm/h/2q4/xEqNHMj7f7vmR/3a7e+leS1dLPbvbds8z7rLXHeKIY5tyfZsKr/P/D/vbaz9ieTWjy+8cPqTeXJs3sRSxzWzbfX7vzfxUupLFHmZJmRpPmT/AHapfbELIkPyv/z02/drKUeaBy832jbsZE2kof8AvqtjQ2kjkPOxPvLurnNNmkjVIXnXH95vvVq2d0kjCaF2YbG+Vqz9n7vvExknPmOh+3Ha77ONn/AqsrI8kLJ9xfK+833V3Viw6hDNC9tv3fut23+7/wACqWK6hhYW2/5VTb8zbqj2c+W3KXCpyyuWLiR7eP8A0lN+3+L/ANmrO1G+mjs2SF9xVdybvvN/tVYvrrcvk7ONyqjM9ZerSOtw77NqMm3ctVGMuawqlT+U978FzrP+zs06twdFvMH/AL+18q3lzDHEPsyMu35d26vqbwQY/wDhm19jZUaJejP080V8malMk2dkPz/e2/3Vr968VoXyTIP+wWH/AKTA9DP5JUMLf+Rfkindas/2hYXdWP8AeWs3UL7ywV37tvy1DfXXkyO/mY/u1kXmqpuw82HZv4q/I6R8TWrcpZutQSPbsdgn3tu+rEOveXbhEfd/tL91q56bUk3F32qFam298nzP527+8q1tHzOb2k/iOqh1JJJFeF1fd/47U39pbleFvutxu/2a5nS5N0i7H2lf7z1rR3CfKh3H5K1+GRHNzGqbzzmV33bl+/8APSw3E0395d3ytVKFk8zf/A38X8VXLRZ9rJv+9WUpFU/i0NKzkf8AjPzfw7auWt15cfycf7P92s2CZ4ZBDN93+9/DV21bd9x2K/drGUf5jvpx6m5DcLMyb9qKv8S/3qvWd9tmHz/KqtuXd8rVh2+FVZJ5lRGb5a0FvCxKb1Td91f4q5pRgd1Pmj7xt2t062aOj5kbds+T/wAdardnqMaQ7E27v4925lrm/t00e75Nu75vmq3Y6h8qI7L8rbkjrz60Tuo1I8x0C3DzbbK53Oi/d2p/47V5bj/SEmtvMRvvK23dWDHcTLH88zMv8XzVow3Tqqu4bH8ar91azlGXLoaVOU3JLqZSgQMoaX96zL96rdrIk0myFF/h/eR/8tKyLOZJr1EmSR0b5krUtYZo1M0PyIv/AH1urCUY8vxD+KZdWPz4diOqbX+8v96i8h2t9mR28qR12bfm+anGbdboju33P3rSfKtPVrxlGxGQqnyfJuXb/d3VnU54+6dMeWWxkXizLu8mXzPJRlRv4axNQt0khd0uWyqszLXS6hY+Ssps/LEf92P5vmrDurVwoguU/wBr5U20ox+0Wcvqdu6wujwqtxu3bpPu7dtcteWrxsXm5rufEVq6tshTc+35P7tctdWrzSO8MKvu+9t+Va66dT3blyjy7HKaxazblWN2Ufe2/wB2s26h3Mfn3N/erevLH7VMyP5ny/w1VuNPf+//ALq12U6nLoc/LzGB9lQbkT7rfxN96rljY4aMuvP92rbW6blQRqzL83zLV2xs/wDlm77lZN27+7SqVv5S6dGMfiLGm2Matv8AOVpf7ta9nCnmB4UZd397+Gq9nYwx+U/k5f7qsvzVqx2T2u5H6fe/4FXnSlE2lTgWre33SK+zDr8vy/xVqafC8c3nQpu3Ntb5Plqrbrtk3q+VkT+L5q1LGN1b53w/y7Y1p83LDQ5eX3y9p9rdbvkDff8Al+f7tb9nGgtxv3Ef6tNy/NurJ0+H7RtTfIEk++392tiyZI42tkmb5UVfMX5vm/3q4pXlL3Tqp+7ys0dNhmWREm2/IrL83y1pbf3iwpyv8W3+H/ZqnYx/apA86MzzL88jfdb/AHa2bRd8Z+dRti27WTbub+7WfNyxOmO4/wAmGSRZNm5mVmRm/hWtLS4UWWJ4dxXb8jM3y/8AAqo2zIyqkMMiyfxbvu1saLb3N5JFeQphV+VFV/lWrpxh8R0e0l9k6DTWhktv321om+55db+l6b+7R027JH3P/wDE1k6PapNEiTJ8zPu3M/y/8BrptJs/OZETb9752/vV6WHlze6c8qnNEsafpKQwuIYWBZtyNt+7WlbxusgdE3fLu+5T9PhuYY1h8xn2pteppLNI03zbirfLF5f8VdNPnLp1CXT5vm2eWwb+CSNvlqSPeszbHbZs2vti3f8AfVQW9ncxsz723r/Fs+X/AHa09LtLmGEvv80Kvz/Jt211xly+8VKX2h0Nl5y+dv8AvfcVk27f71T29i/l/Oih/vfN/FV61017hdlzNGwVF/1fys1W5rbFvsL+Vu/4FureM5ROSp70TktWhhlkV7kLtjdt8bfN/u1yOqad9qk+xzIzpvVn+WvQdUt4ZLaXf+7Vk/hTdXY/su/CVPFXixvGGt2dvNp8O37Gtw/+sZfvf7y152ZYilh6UqkzjjH2MD6N/wCCX/7IGm+CJE+NPxJtrV9YuNy6Tbybf9Fh2/eZf7zV+ieheI9KsLSO2u7lYxt+8z/LXxLp3xqs/DP+gabND5zQbPLb7qt/D/47XP8Ai79rTUtr6gqSW4X9xFIt1uVmVf4V/hr4mjm2JjjPbQPMx1OOJgoyP0Sutc023sft7XKiLs+75a+Yv2sviheWWl6q+k38OIWy+5vurXzov7fHiSPQbTRL7WFjSafa0kn3dq/8tF/2t1eZ/tIfHh/EngiXxDo9y13Nbz+VqNxNcfNMrf7P8K17GMxk83oq552GpxwdXnOM8ffHC8utUkRNV87zF27l+ZW+b7u7+Fqx7X44X9nb/wDH5Mkkn3FX5lavEvHXxB022b+yra/aSZn37o/u/wDAazNN+IU1hZ/Zv7S8pVfa/wDFXx9XLakp8qPtctziVOPxH1N4d+Oty9vs1W5VE2fuo/u7v9qpbz4i3PiSN7Cw1j7P8isjN95a+XNP+KUN9Iba5hZHjT5ZmlVfmWut0v4lQ+IIYrl9eVJWRvN2t821fu15OIwU6J9TRzql7I+jtB+IFta2z6bf6/5vz/vfl/8AHant/iRZ2ObOzv5PJ83dAzPt2/7NfPA8aX9vavDYXKjzt37xvm+b/ZrO1b4ieJNF0+K5h1iSRd/meTMm35vuttasPqs3H3RfXnUlpI+jdS+KVtqEySJNveFvk/u/8CoX4kaba3CTWfy+c6q21/vbv4mr500/4mQ6q6PDeMjqm64Vfl3VteH9evLr7keXhRl85flX73ys1ZRw/vHVHE+0peZ9IaT460pZP9JuWhmWVWabdu/4DXf+GfiBp6/Z3R2YyM32eRXX7v8Aer5f0/xU8McRmdcM22VYV/i/vVreD/HF5HYyLbP5Kea3kbf+edTOi1PmpnHWrQ5PhPRv2xv2J/gb+3F4fhtprlfDnxCVW/snxdGi+VI38MNz/eVv738Nfk38afg38Uf2efiJefCX42eFZNI1rT7hkRd3yXi/wzQt/wAtI2/vV+qdr8UvtVpbw/bJPI2/e2bW/wB2q37Snwx+HP7ZHwVk+G3xIto/7b02Bn8F+JpF/wBJ0+Zf+WbSfeaNv7rV9nkub1eT6vivlI8lVquGnzUvh/lPyUjhfaqbMn+D56u2qoqNC77lX7yt/D/s1qeNPh74n+GvjC/8DeMLNbe/sbpom/hWRf4ZF/3qoWqhV+f5gv3/AOKvYqPl0HKpGt7yLCtNJCqedt+dWX/apbXfNI01zDsVZdibqW3/AHKu8NywMn+xu21b8iGO3EKJvDfNub+GnGVonHKJm3kkMMZaFG/3W+9WPfW+6KV4fk2/wsv3q32hdWHmCPym+batULrT08kIhbDS/Oq/w1pzcsomfvnMzWIhX+JWb5vLVPlaqf2N5I/O8na3zfLu+7XSXFmJI/kTDL/D/eqrdaW8cf3G2sn+srb2nv3MPZx5TK0uzuZFH2aRleT+L+Ja7LwvYzW8yQ7923/nolY2n6Y+4bJtn8MUiptb/erpdHsZI2VJnbdJt+b/AHa7sPyyPNrylG521jCnyl5vNVUX/V/NXT2rfZ7z/XL8qfIyp/DWT4fhhmhRLaaHaz7kjjT+L+Kt61t/9HVJX+Vm+TcnzV6NOnCR5dat2LVrawybrq5m3Iqbljb71XraJRp4iRNo2EADjFV/nWVU8vDMm1mZPl/4D/tVctolhgEcW7Azt39evev3DwSio5vj7f8AQLU/9Kge1wxO+Mrf9e5fmiG38mb/AFL7Bt2qvzNt/wB2rLbFtWS2i+Tdtbc/zf7O6oWjeSRVSFtq/LuVquNYpHMv77en/PNvlr8g5mfHRqGdqESXAXZcyD91t2/wrWTfRzXUZ3uxTyt27+FttdDdQzX37mEsWj+/5ifw1j3yzeWqI8eyNNr7qs0jWl0PPfFy+XGUuX2M0X3q8r8UWvmW3nWbq0avuRmdvvV6x4wkSaFJkhX5mb7vzLu/vV5n4kjfa6Xnkl/vfu/lVWqoxlylxxB57fLLJJ8j7lb/AMdaq91JtjV3hw6/eZa1tQaG2ZvkXdu+fbWYypMzok+5W/i/u11fD7oqlafIY01w8kbd/mXYzJ93bWdfRvH++SH5meugutH8yRUcNhk27ao3WjuqMiRt8rbd33lWq5uX3Tikc7Mz+Z5OzP8AEtLC25jsTeG/h/2q0brR3WYL8zfLtqKPTdrNDs+9/EtTUj2IiuUfp8m2ZXmfG3+8v3q2rG6SGRJv4Nn3l/h/3qy/LRfkdGZl/hq3b/KrJHu/6Zba56kTppyN6zkfbvfaV27kjrStbrzI/n3ASLtrB02V7XbHNMy/wvurVt9nll3dv4di15eI5vhPUoy9z3TZsdWuYZEcJ91PvL/DXQaXN9ujWaYMwV1bb/7NXKwxzSLvR/mj+5tevUPgh8P7rxVqBd4WI37POZdrVz4en7SdmaVK0cNSlKR0vw71T/hD9c03xPeOyPb3Su7btystfuP+y94p8Pftq/sFX/ws0q/3a94biWXTvMX978q+ZDIv+98y1+O/xi+G+meFPCqabC6veNF80avu2rtrf/4Jtf8ABSXxV+xj8aNO1LXLy4m0yGX7Lf2twzN9qsWb95/wJfvL/u17/wBXpKjyo+UhjKs8Z7W56D+0do+sWsl5Z3NnJDfWtxtlj3/NHJ/Fup3wj/tWbwvc20yed+63xNv+Zdq/NXvP/BULQ/h/rnxc0n4/fCrVrS78LfELRo72C5g/1Zm2/Mvy/wAVeLfD3R0ghm037fsga3byF+6u3b91v71fk2d4L6pinBfCfuuS5j9fwEKq+L7R8V/tKfEy2s/Gl/C7srWtw0XlyJ825fvV89+IPHX26aV0ud7M7Nu316X+3pZ3/hn4jX9qjttml3Juf7zV82x6k/nb3dldf4f71e5luDpyoRkfOZ3mVWFeVI321Ca6mZ33YX/x6uY8U3U8OpLMi/w/I1aWm34mZUm+f/Zql4xXf5fOF+7ur0KEPZ1/ePjsRUc46SK9rr2p3GyFPm2/M9dt4Y1p5nSG5v8Ayv8AelrlfDekw+XvT7/8H+1XfeHdL8K68YrfWLNYivy+cvystd0vZSi00PC06svikd74T1DwlJCs154thVY0X5Wf5m/2a+hfgr8Ifhp8SvBtzrdt4wt5b2OJlt4Y/mbd/tV8leIv2edN8QN9p8E6rIVVdzR/aK1fhL+zr+1FHqyp4GuJi0m7b5dxt3bfm+7Xm1sLKXvUqp9HhYx5eSVJ/wCI+n/2bfgTrej/ABqS80fUoRcWsv8ArGn27v8AZVa988Bz6tp3xzjmjvSl5HqlzunzuO/EgLe/evizwX8J/wBtjUtQS80SHUIrlpWiaaOXazSbvurX1p8KZPiJ4d8WaSNPsBf+JrYiOSCVgPNuAhWTJ+u41+w+EWHqU8k4mlJ3vg5/+kVD6TK8PRhhq0YJpuL39GfYVn+0vNa6f/ZWvPI80Nvt27ttfAf/AAXU8eeG/GXw08Ia14e1JRPZ62Fe3+XzG3feavYf2vta8eeF/hTeeLbm5sbPUoYvPnWO48xo2/u7q/Kjx78RPHfxm16O48Z6xJfeXLuih3MyLX865Rhq8sYq0pe5E+TxUvY/up/Ez6G/4J8/Fi58P+Orezmv1hSSXdLI3zeZ/s/71frl8NfF02oaHbagnnPaTW+7bJ8zV+Mn7LPhXVdP8aWEypnbcK21l+7X61fAW+k/4Re1d3kaOGBV8lv4mrgzWUfrH7r7R9lw/UlChzTMf/goN8RLPwr8DW0HTZv9N1q6js3kkf8A1MLfM21f738NfH2gtCot9jrn/noy/dWvSf27Pie/jv4vR+GNKdW03Q7f/Slb70lwzfLt/wB1a850GB1ZHh8v5X3bpK/SOHcH9Xy+PN9o+RznGfWcwm4nV6eEaMJC+/yfm8zZ95a6DR7Uz4mdGRF5RVf5mrH0PHyB5oy//LXb91v9mum0eGGGRXSGP5n+Zq+kjH3Tzo4rl92RrabHNbtv+zM8jLsRW/iroLKFlUJs/dsny/xbWrN0+18zbc/vN2zcrL91a6Ox0iFY1WF/lb5nZf71aU6f2jf61L7JHDb/AGO8V/JUiRdqSM+3b/wGtCO1ea3MqJhvlR2jdV/8dp0OnpcNI9z9+OX5a1bXTxCqIlnt27dm1KvllzEVMRKMTKk0m8imST5R5bfP/u1X/sXd8k0EkXlvuRli3LJXWRaWjTL/AKNl2X7yp/49VyPQ3+SH7TuSP7m7+KumnT9w46mKnLY4HUvDu6Sa5tofJ8x9m3b/AOPVz+reGZt0kzx4ddy/N/er1680CGaNIXhYuv8AyzZ/masq48Lu0m+5dd+9m+7t21fs2cFatKR4nqHg94V87ydiyN+9kjXbuauc8SaONLulcSu3m54cYxj0/Ovcb7w+8W/f/E/ysyfw15d8YbD7Ff2mVILCTORjOCtfpHhUpLjnCX7VP/Tcz0+E534jpL/F/wCks8w1zw2t7dvOu5CRuKg431xXirwWHjkhjeOL+Lds3V7n/wAIzHd6Zb3UsDfPbj5x9K53WfB73CtCkMcoj3Oqtu/76r4/O4RlnWJX/Tyf/pTPn8fKX1+q/wC9L82fOfiDwTM1rsmdWeOVl/dxfMy/w7q5q48CvaM0/wBjYtsVv7q19Bax4NmMn7mKSbd/07/N8tc/qnw7trqQLNYNGVbft3turxJR5TllL+U8r03wrNHcbFhZ3Xarrt+7XV+GfDdreTLLc7Yk+b5Wrr7HwXGsfzpJv+9t27d1XdP8L20EZ2QMx+bZt/irl5eU1jIzLTw+kcafuVYM3yMq1vab4PhmukuUjVH3bHmki/hrU0nRZrfZ9mDFWRdkbfdWu00fw+7bYUeOWNfmeRfvbqn/ABEylE5O18OusabLb70v3v8A0Guk0Pwak2zfD80bbpY5E+9/wKur0/wyiuiXUMexfmSFf/Qq6PR/CMMiP5KfeRWdmp+zM5S5TkLXwTttB5z7vm3fu/4v9mtO38Jwxsv+h+bt+/JXaadoLtmZEX5fu/w1Ym0naqOnmbI02bV+61EuX4Qj/eOQtvB8MCvss4ZJvN3bvu1pW+jwyM3yKsUafdb5a3bjR5rhd7pnc3/j1OuLNJF2TIpb+FV/u1zy973jeMjmptHtpoXS2dS8ifxJXO6x4fhWx+SHb97zV/vV38lv5M37lF2/dVtn/oVYviKzSeQo6fdTajL83zNUcv2jXmPkbWNcRY2htod235E+b7q/3qZb3FmzJ8kfzfM0n96sNdUfcHmffIq7f3fy1PbzOvzo8iD70Ue3+GvPjH3veP1SXJE3ZpnhUPDe4Rl3bdv/AI7UV1HDuMMyZT7+5f4v9mqXnSNMNibQy7fmb+KmyTXLXSu7L+7/AL1KXuyFUlSUSWSOzyyfMjqv3WSuQ8UW7tHI95MyvJ8ybn+6v92uq1C5TzBC9zlV++y/ermvGF0kkMjo6uioyJuX5qiXunj4qVP3kedeIfmUOhyivt3bKyZLjcySbNp37dy/w1d8QTTeTvR8u331Ws6JoWVt7tv21ly/ZPMqSNKxa1kbzo/3rKnzLW5b3U0NuvkouyT/AL6WsfRtk0iIk25v4/krftbP5ofnZ/8AgFT7vwi5fd5izbrCsWya2bZtVvlqaSN7eIb4WQ/7vzU/R4YbfLumx1fc/wA3ytV64bbH/o0Pz7N25v4a05eWRXvS1MxpPM+eaaMhvuMyfdqlqUcKsiLNvT+Nv4a1Ly4hhRpkh3n+792szUWRkSVE2Mqbty1MYilyr7R7v4Kbd+zc7qSc6HenPr/ra+QNajmaNnR2+VtytX2B4Jbf+zgzJnnRL3H/AJFr5G1yRJLffIm3b975K/dvFLTJMh/7BY/+kwPU4jd8NhP8C/JHF6lNcjKO6kVj3Fx8xfYrCtfXNizP5P8AFWK1vt3vHu3L822vx+PvRPialQgkm8wLs+YNUdv+8k2D7392pfsb/wAH/AttTWdkI2MvzBl+b5lrWPUx5ZSkS2av52+ZOa2rOTdJtmTnZ/eqjb2Mqzecj8SfwtWrb2MLSfJ13f6ys5S5jSNORbtU8zZ2C7ldatQ/KyvLuyq7aZa2v2dVD7Xdm+etKOGFWWZ/MO7cvyr8tZylE6KdGew2G3kkb+//ALK1dhhaFV2W2TJt+VakjtZvs4e02iT5V+797+9V23sX3f6SF+ZNq7XrCVaB6MMORrbxrDv+bLN/ElEcm24Lvu/d/LuZank098/cY7t2756dHDDJbp97HyrurGVS5vGnKUhVH2mNfOfJ/wB6rNuu350+fy/4aS3tUVdkMf8AF8n+zWrY6R9nw/lq25fnrhlU5TvjRkyDTw7Lv+X7v3Wf71adizyTNv8A4k+8v8NMgs0VUdCwRvl/3q0rG33R7Jpv9rav8VZ+2Y5Yf4S7Yrtk3wjcjfJKq/e/3q0VZ4XXykklRfv/ACbW3VDptvtjVERQ3/j1a8NvIYV2TL8zs1Y7fZKVGUh2mqhU+c+d25nVv/Qatxvu27E2jYzfL/DTvsiR26uEy2+rCwolv5MM21lRtn+01c1SXMdNOjOPumVeWcLfI+4q38Uf8NZ+pWMdw2yH7m/bub+KupksZpFXYjFZFVfl+b+Gsy4jubiFZvO+bf8A98stR7TljzHTGicfrFq+Hd0+bdt2qvzbawtT0l4/4F+ZPvSV297ZpIvkuiu2/wCdt9Y+oWe5gjpwv8Vaxre6VKnJe9E4G80d4ZGmuU3hk3bqgm0fnznhVX27ol/vV1Wpaf5bKm9XDf8APP5t1VGsEWF4URQZF3bf4q3lWvuOOH9w5CTS3lja53+UW/iZfu1LZ6TN5hR33/7tb8mjoyrJ5P3fmVWpfsdssPzowlVfnVaca3vBKjH3bFW1t0hUJDym7a+2pYbzduREV9u7azLU726R4SFF+b5nkb+L/ZqvJJDHMrujIrfKv8VRF80uaUTmxXu7Fy286b/RvOVfm3eWq/eatXTV81R59ttbd8zM/wA1Ztq3lsJkfJbc23Z92r9jN5n75ZtjNL8jMn/oVFSUpXSOOKtys6HTVkgUpD8qK237/wAta+nxvbLvttvzSrv8usvSYUmJS5h81pPlRo/l2/8AAa19PjSSZf8Ax7+Hb/vVxSly6ndGP2TXsFFvCj/u2C7tyt97/eWtDTW2lHmdiZPvbqzre13N5MKZ3f8AjtaVsvmMz3Lsrt8v7uspcvNzo6I80tEadva2fmec7btrbtu/5v8Ad/3av6L/AKP/AKNNO2/733NqstZMdvdeZ+5mVkmT5vm/eVraQqW3l/aXaJf+mjbtrVtGQ4y97lOw0u3hbbMm1fL+bb/drrdHheaOJ4XaIsu3/e/2qwPDckMcfl3Pls3y7fk+auq0nTYYbtLxLmRHVNu3buVt1d9H3TnqS5tTQs99vIg370b5Nrf+hVakV5RG8O7asW1YasafDDMywpCzN97d/e/2auw2b+W6Rrt213U4++Tzcu8jLsbOZ4/PTl2+6y1tSW8lvGr+cwdXVmZaktdFeDdbIkmWdf8AdWrTae8Nsz2zqw+83+1XVGPNMmVSPKFrNcwsj71y3zeWybmZakkZAqzb5GRUZv3n3dzVUuIbmxZ5ryGbfsXypFf5V/3lql4o8RWfg/Q31vU900K/JFaw/ekk/hXbSlLl94uMYxXvSKN9ND4g8TWPgy2RW+1Sr9tWN/3kcP8AEy17LD4q0Hw3odnYeGN0Z0+38pYdnyqqttryn4NxwtY3HjbUEmttavpWWW3mXb5duv3VX+7WX488dTW+oTCGZvObd5XlvtX73zV8Tm9aeOr8kdkeVPEc2sT0Hxt8cv7J26t9v8t/ueS3zK3+1Xm+tfFt5NQe2eZndpWZFhf723+KvKfEnjy/1y8ubm83JB96JZH21x3iDx9c2cLecP3sf3FVv4q5sPg5ROOVSXKetap8WrmwjSbWNS81Ld28qbY3mR7v7tYGvfFpNWt3mg1KaNJPmlhZvnavHZvipNdXT2015v8AM271b/0GsDVtehuJvkmZBub95u+Za9ajTlH3eWyOGpKB1WoeLn1bUvtKQyJLI0kXzP8A6v8Au1SbxNqumxqIUV5lXO6T+KuM1bxdCyuiQ/NHt+b+KRqqt4yubrY/nKzfdaP/ANlpyw/wyjua06nKdlF423OZriZWeSVju2fMv+zWxoPxceGNLB/JtkZVR/L+b+L/AGq8wm1ZJI/Jtkx5n3938LULLc2Z/fbW+X5GWuHEUL/EdsMRVhrzH0F4Z+I0M0Ys7O5mfbKzSrN/D/dZf7y11LeItS1JY7DUkjuUX/VNH8u3/wCxr500HXNSWSHvJ/e+8zNXq/g/XtVvL3fczfIvzKrP92vCxlNUavMfSZfWnWja51FnHeWeobEhYbn3Iv8AC3+81d/b2qaa0NtD9omtJkX95M3977yr/wACrN8O2dhqVuk2n2bJtVftDTfxN/ervrPww8mm/aUh8xY9q+XGm7y/9qvP5qUo27nuU8PV+yOXS0t3RLKbymXaqL/E1dXpscOmwpHbTxod3/LZflVdtZVvp5tdQ+021szRsm1ZPvfd/wBmtm38P2euaa/9pSyPtf51VtrLtopx5fcOfGe1ia2jww31nsuUwu9WuGVNq7f9mr9vpWpNfO9nNhPmaKNvvrU3hfR4brVrbR97XT3FrviVV3Mqr95Wr0K18B6bcLbm2muCI0ZXXbtXc396u+GDnU9654NbGSp/4j4n/bw+EPiHxJoo8T21tHcX2kp5vmNF89xH/wA893+z96vkCKJIZGhhDMVav12+JnwbTxJpFxol+i3iSRbdqxfvIY6/LH46fCPVfgP8dNR+HWpQyRWd5K15oi/3o2+Zl3V7GBxU6l6M1sRRxHs5afaMmGZFUPM/yr97bV1fs0cgR93975azbNkNyiIn97za0IZHlUfuVlb7vlsu1q7Obm909OMftDprPzmEP7tDHt+Vfvbf71Rf2fcw7d9mx+9tZfut/tVpL9j87yY03Lt+9tqOGPEx852+aJv4N22lGOpqYt1pO6aZN/zfxstQSaakil3mYsybYlb7rba17iOZZo3ebc3/AC13fLuprIn2cedCyuv8TJ93/gNdTjzanHzRjzGJZ2LzTYmhZFX+Gt3RrG5hvPOublWSP5ait1+0QOkM2/zG+eRmrV0m3uY5khhgkcL8v3PlavVwsZHjYqUY7nZeG1hWGNIdqM0XzeX95q6CxVGj+07G+Vlbc396uW0uORYUmR2V1l+9s210Me+aBkaZV/v/AD7d3+1XdGieLVle5pWq225538tZd2/bJ/FuqxHCsECxEkAIM4OSOKpQttkijmh3N5X3o/7v95qvp5YYFHyuchge3rX7d4JyvnWPX/ULU/8ASoHu8Ju+Lrf9e5fmiWOSGFv3cPmfN95X27W21ZdXMbTfaI0fyvut8zbv96q1vC8Kyu8zfvF3bl209FS3jLukkg2fMrfeWvx2NT3uU+R5BGuXbT0tZpvlX5t2/wDirn9WvJriF9kKtufanz/+hVp6hvaNXh+7s+aNfvNWNqkkMymF0w7fNuV605mTy++cP4uXZl5nZdv/AHytea+KI0ZZH353bVr0vXkebzUdMqyfvdzfNXCavpv2mQ21zDs8v5dv8X+zV85pGPKefXGlvcSOkKMzs+2n2eivHGd9ts28fKn8VdZHoLzXDpbfK0fy7m+XdVuLwwi2/l2yMz/xtW0ZQH7PmOQk0FG+583mfxVRk0RNmxE3/P8A6vZ83+9XosPhU3kaeZujZU+6qU5vC6KrDyNyt8q7lq+b7MROjOR5Y3h0LcSh4cTKnz+Z/dqhdaLNGo2PtbZ/dr1ibwTMsnkyp8jf3k2/8CrO1Lwn57ND9jZVj+X7n3qFKcTKVLl+JnmMGlvIpjc5f+Nmp8Gm7W37M7V2qq12eoeC0hzNbJlf/Hqzl09LdVR4Wdlf5NtTUpy5JWLp+6YwtfLX7jMZE+VZPurVmPeW8tOWj/i/hauq0P4X+IfE1wf7Htmd1TcsarXMXGk3mk3Ettfow2y7WXY25fm+auCVGcjeOKhT6nU/Dnw3c+JNaTSk6zOuyNf4q+pPhb4Zt/AVwlzebfssa/6VJv3KrL81eG/AfxF8N9H8caakOqxm5mlVU8xNu1v4t1e3ftZeLLDwv8N7/R/D2pbb68t2g8tZf9XuX/WV04fD+z96XxHmY3GVakuX7J4l8Xv2pFvviJfHStYjmhjuGT5m+9XCeI/G3/CZM2t200cVzG25I1+ZdqrXzzr1rdeH9Sf7TqvmNJu37X3V1PgvUr+O3+02E2/au371dP2ji5ZH1r8Cf24fFvh34er8AfHN5HPoUN19q0O4un3Np8jfejXd/DXvfgH4sJeXFo7uzxsisy/w/wC9X5oeINceRn3p8y17B+zv+0LHMraPqV5JHcwr87SS/K22vkOJsr+sRVWB+gcIZzDCz+rT+0d3/wAFJNDs9U8cHX7BJClxFu+58qttr46utJvIZC7/APfVfVvx4+JWm+PtJgvL+5meS3+Vmb5ty/wrXjLafpWpbkS5jG7721a87KKkqeGUJI789w8a2Jcos86jjmhbf/49Ud8v9oTrbRorbfvbv4q63WfCP2GRXhT727+Cqmn+FftTb3/75r1qctj5lU5RdpRGaTZ+XboiQqp/g/2aZezzW7P5M2GWunh0V7e3VHTdIvy7mqva+DY7++VJNyn+9975qrmhz8x2+zvDlicnY+MPEmjzYttVuE/6Zxv96vUPhT+1V8SPBeoQ3lhK22P5Uk3bW2/xVT0X4K2Gvaglm9ysKr97zH+9/wACr66/Zl/4Js/Cvxd9gufE2tyOlwu91jTcse7+KuLFVMM/dmehgaOb05Xpv3SP9m39tq2v/E1tYeJNKmBaVmi2y/xf7Ne4fC3WI7n41Wmuxnylmv55l77QyuQP1xXpvh3/AIJV+Bvh/pMV/wCGNQW4SFfNWaa1Vm+avNvh74eZPjrD4aT5TDqtxCMDpsEg/pX614QKP9h8T8r0+pT/APSKh9vldTFVaUvbb2MT/gpl4jh0H9nbX9Re0Yrcr5cG77rN/s1+cfwN8Dtq1y07pv3bXZq/Yn9rj9mf/heHwXvfCX2b52i3W+5/vN975a+Avhn+zT4t+H91qFh4hs5oXt/lTd8zN81fzvg8bSw+AnTUvePl82w1SOOjKfwnT/AXwGYdct4fJjzG6s8nzbV/4FX1t46+Nln8IPha+qo8f2zylitVhb7szLtVtv8Adrx/4T+Gr3w/p/8Ab2sQ+THH+8lmb+FV/wDQq84+I3xGvvid4qmv7mRls4W8qwhjfb5i/wB5lroynAf2jX55fZMquYSw+F5IblGHUNSvtUudS1u/a7ubxmlnmb7zTN95q6PQbo/aFR7zc+3ci7Pu1z+k6fDDJvR5MK+75vm210uixw7ldPkWNfu7PmZq/UKPJCHLE+Xmm3zHY6XDDIpd4VCN8z/L8zN/s11+j2tz5yTbN0apufcv3v8AZrlNHU3Cqk1yzhfuRsn3f9qu20eK5VsTXKkKm5Pk+XdXfT96BjzS+0dT4Zt0Zt7usUTfMiyN8tdNpdnbX0KYRdituSRmrA8MqjPsSbLx/O2371dnpMc1xG29I03bdm3726t/hD20uhJDo7wxiF3jy3+1/DWnZ6clv89s8MkU0X3VX7tT2lm8zR3PkrEi/NtZPm3VdhhWFvOm8sKvzfLW5UqnYq2FmkbJ+5b5fvt/erYt9JtrjZMltCzfwrv+b/ep1nY/6R86fKzruVa1bPTXkZUd1AX7jfxbaIyOeUio2k20iuiQrGV/1W75qy7zw6jM7zc/w128empfWuIYdyq+1WqGbRYG8y5e2V/3u1JK6KfunBKoeX6x4bh2nzE81FX5V/irw/8AaR0/7Bf6SOf3kMrfP97qnWvqjWtBTa/7tf8AZVflr5z/AGxbOSz1HQRKSSYLjr7GOv0nwsSfG2FflU/9NyPa4Nk3xJRv2l/6Syp4f0Z7jwtp0iMyq9lDuCr975RWZqnhm8aZvN3INrOkka7VX/eWvR/BmjS3Pw20R44iC+nw7WK8fcFLqHhm5aU7I1dfu/7W6vj87Vs5xNv+fk//AEpni5hP/b6v+KX5s8b1bwukO7YjY2fJ/tVk3fgpGuE2JG/lpv8AMj/i/wD2a9i1HwqjL5IfY7fN92sa68LzQ7njRWCvt+X5q8OtGPKckZHmH/CJmNjvRWVvmWSo/wDhHoVt2uYYV2N8qN/dr0m50O2jWXZDsH3n/wBpqz28NyW+H8mMLI3+8qtXHKPMbxjy/CctpOhPHC7okZ8yL7sjbfmrstD8P7Fi2QqRJ/d/vU3S9DT7ZvmhZx8reX/tV12i6ci3CNNNs2/8s/4azkOT5iLSfD3lqrvbK4X/AJZqv3q6G08Mu3kuifN8rMu//wAdq7otrDJG6I+4fM/lr/yzaug0nSXupkfCpF8rNG3+1REzlzSMmHw26qERGJb+6ny0smhfZ48ojF/mXayf+PV19npm2NPJ5WP7jf3aJrNG3/aZPlbo395qmp/MEZfzHGyad5cex4ZG3Lt+b5m3f/E1n3Vr9lby3kUqybfL2/xV1uoafDHbj528xm2pH/C3/Aqy7rSoWvHh8lXPzL5f+1/s1hL3ionI3Fnsj2TbYtzbt2z7v+1WTqFukaskNgzuq7vMrurzw/MyxPCiqv3XXf8AMtZF5paR3iwzJvjb5nZW+6tTKoan5uQzPMu+H5X3/ulq1as8f7533bf+WLM25qwbG8vLVndP3X8UW371XrGd75ldyodfl3Vyy/mP1CWIjKldmurX7BPLTa/8KyN8rVJ9tigRtm4v/Eu/dUFmr/aPtME25mXZub5ttSSQJbun7ltzfKkmzbWceQ8+tiOaPuhcfvlM3ylV++2+uS8VXzq0lzDJt2/KitW9qV19lkOzy5EXlpF/vf7Vcf4gm85me56MrbmX+Gs5SPN5pc3McnqRupvuIu1v71Jptm/2pYLlG+/t/wBqpVt5pNk2/cPl+b+7W7o+mw7t72yuW/hb+H/gVc0pco6cfae8SabpdtDIltbQsVX5vm/iroLHT5FkXenDfMm7+9RpOlzRys/zY2fPt+9W9Db20i/ZpE2rIv3v4lpQ5feHyGa0fkqyfZt27+JUqX7P9ojVHtmfb8vyvt/76qb51kWL5dvm/eb73+ytQ3C3NxHM7wq3lt/q9u6r9n7uge0k5amZeW8KsOwb5mWsbUP3iy7NzN/AtbV15jRnzkkt1jT5I2i+7VC8kgjtGuUTft+X5WqqXNH3TOUYy8j27wVgfs1vg5xod70/7a18iaxE7Qsjuyov8VfXXgtz/wAM0ySSNk/2FfEn/v7XyJeM8xfZyNu7a33a/dPFBWybIf8AsFj/AOkwPW4jlGOFwl/5F+SOM1aF2b/XMG+9838VUfsczMkmznZ8+2trULcfaG3vgf3W+7Vfb919+Nv8Vfj0tj4upGUinDa7T88P3quLB5n7nr/fp0dn50y8bm3fPtrRsUTaZk+6r7W+So5kdVGiV4bXavyJurVsbG52xO6KgVtyMv8Ae/2qmgtoWcIm3ZH99lrSjsXZU2TNj5d9c9SpynVHBy7Edtpbr84RSd+5mq5b6fatI33sbPl3Vp2dm8sw8mP/AHG3/eqwumgR73fY27+KuaVTmjrI6qeFlzRK9lb/ALxSn/LNP87ql+ywvNG77nP3n8t/lX/ZqRbOZpNmxU2/xL/FVy3sHkbenlqv97+9XHKpKPwnpqhHm+EhjsYWO/8Aebo/vrJU0Nqkcmzydrt95Wq/BCYVh2bnP3WbZu3VZjt4WWHzn+Wb+JvvNtauOVaf2jtp4VfFIpw2MKws6Q/8B/8AiquQWNyzfvk+ZV3bV/u1fjtdsmx/4fmRauWOnzTEu9ssK7fvLUyre6dEcP7xRt7dEyny4j+/u/hq5Dp/lTJ5M3muvzOqrVhrGGObyZvmfYzJu+78taGmKnkyzOipIrbIt33qz9tLluFTD82hLp9jbLIqI+5mi+dtvzLV/TdNdpGhmRdrfLtb+6v/ALNRa2Lxqmx42+RV/wBpm/vVrWcbyqsKQxqy7vNZvvVnUrcsviD6tIS1s442WHyMhn+TdU66fNDI81zCyLJuaJamt7Xy1HnI3/Af4asMzrGn3nZV2rJWEqnve6bex5YxKE0ZVo5rZG3bdysr/eWqEweFghhVPvbtyVsXTQCBYYH2CP8Aur/31VbVLN47dZn3bfvLTjLmL5Z8hy19DNHM6Q+XvX5vlX+Gsa8he4kL3MPnNH8y7k+Vv92uu1bTYbpXmSTduX5GX5a5/ULNrht77R/dXdWnukcsonNXFukjH7NCqNJ/47UFxGjbEmRsxuyfd+9W3dWsMMs32naNsqtuj/u0xrO88v54967922tvae4ZS7GHHZzNI/3Y0X+H+98tMWN2jdI/mZU2u1bMdrC0L3PnK33t0a/dWq8cSKrbIVUN95mojH7RnKp9kxLqPzV+Taj/AHdtVGhvJFZHTYy/Kv8AtVs3lq8B+5/tfcqs1uklykw+ZmTbuVPu10xlb7J5lSXNLlZBa28zSeZcopP8TfdVlra0ezea437FRVRm+/8Aw1Bo8KSN5ezG3+HZu21sadYu0w3tuVUb7v8AF/tVlUlyy0RFOPM9ZFrSY5Jp97w4P3d1dHY2cLbnmeNkkX5W+b5mqjbx20eN6M8i/Oqr81bWmx7meHfGF3bkXZXHzc0eaR6FKNqliSPT38tEtvk3bd+75dq/xVfhs5o42hhdlRfu7vvM1WoY4fL/AHPzOyfNGybvMq7Hp800nmeTlflX94n3ax9pKR2RjDm0KlrazSzLcvw+z7rfw1v6TYpcKHdM/Nu3bKit9PSaNbZ/Lfd/31W3pWkvcKh85l3S/wCrb+GtY+9ykShKL3NrSbeGRvOTpD8ny/3m/vV2+j2u6FA+4lfl+auY0uwS3/fbGab5vlX/ANCWur8OQ+XGkLvIUbbvb+L5q9bCx5oHnVpSpyNqztb+Fm8mHafveYyfdX+7Wtp+m+ZKghSQ7ovvL92Sp9Lt9tqybNyt8v7z+KtzQ9NuLe2S2udq+ZtZ2+6u3/Zr06NOWxwyrGfZaXeeWXfbt/5aqv3auR6bFDjiSZ/mVv4du6t2z0tG3wrwiuv3v7tXofDaTTulym7dt8qNf/Qq6+X3iIVpS0OPutLSa2aG5dnWT5W/2f8AZrjtT8Mv4m8Yf2NZ6rCkdi6u9vN/E38P+7XrfirQ303w7fTb4UZV2xSSf89G+Va5ux+Htt4Ft7bVdYT7Pef6q6WR1bzm3fe8z722vEzrERw9C38xVfETl+7MTx5dQWuhszpa2lzvVEaH7zN/F/u/3q8C1q6vI9auLm/vPMfb8jM/yxr/AHa7j4uWd/Z6lqdhO8bzTS7d3m7v+Bbq83urW5vlj0ewtmeRom3eZ91W3V8pQUpbHFL3vdOe8bWN5NZpPawx7FiZ/wDZ3f3q838YTGOFpobndc7F3ei16v4uW80XS4dEvLnesbblWOL5m+X7u6uAvvC9zrgTPnR+Y+3ayfK3+9XVRqRjPyCpGUocpwEOmpJdrvRWeF/NlkZ/utVDUr+S4vlmtk4+47fxN/tV6G3w9uby1EKuquz7V3Nt+b/a/wBmsnUdD0rSY0s9Vv7X7W27zZI/+Wf+zXrxlQlI4KlOUYHAeIrKG1kifzpJkZN26Ntu2s1Y3tYpX+0tvVt21mrqtet7G1kR9/mBvmdv4dv+zXLapqENxL+4SN/7jbvmWolKEjL3ojvO1Web5H3Rybdnz/NXQaPYa9JGdh80bvl3L/DXP6XqFhK2x5sS7921vl212ek606sjpCqQt/t1wYyo6cYnXh/3kviNLQ7waVMX/drc7du2RvlWu/8AA+uTLIHudr3DbV2qn/j1clayaVqGIYZrfd99Gk/vVoaXq02m33k3OpQskjf8s/4a+eryjWlK59nldqUo8x7v4Z8TTW0Ze5+5s/er/Dt/vV7X8JfG2la5o7Wf7mUbd3mN/er5NsfEDsv7nVW2sjL8392uy+G/ji88M3CWVtfraJ5q/Nv+Vt1eNiOWn7p9vQq0oy5e59VR6DZyKtzFCspj3bfLfatVZNH0/RdWtr+GFmhkb/R/MlZmkb+Jv9pawvAPjL7ZpOy/vI0MMrLtX5d3+1Q3ipJr5YrmbeluzeV8zf8AjtTRrcs/eNa2FhWPq/wL4N8Pa1qFt4h0ezWK8ktVR5I28uONf4vlr0S3+HsMccsKWEm1n2o25f8Avqvm39nf4mWGpeKrOzubyZotvyRzfdjb/wBmr7t8HaX4f1jQEfR4hM6xL/pTNtVv+A17uBrVK0LwkfDZ7lcacuZnkV98NbbS7lLm2voXlb5Z1+823b91q+O/+Cs37Fd58RPAdx4z8AabHZ6jocX26CNkZpJFjXcyq391q+/fH3h3R/D6y3V1CsJV9zeX8qyfLXN6lqWia9pAvNes1vbab/Q/LZty/vFZdzVvLEezr899jx6WEnKN/sn89lrqE01nDc3On/Z3miXf833WrVt5HWPfDDtljVVfzPvfN/FXpv7aHwTm+C37RGr+GDprNpdx+/sLxU+ST5m3ba87t5Ps5/cJhf4d1erTqe2ipLqevT5+QmzdSMEd9w2bd23+GlkkuYWlmmtv3G3bFMr7dzU6OV2ZbZ/MV2Xcu37rUy437Ve5h+Rv/HV/2q3px98uVSJBcQpJvtpk3nbu3M/8VN2eTIHeZlXd8256hkupvtDuj/7K+Z/tUBoZrh7Z3Vnj+b/Zrrpxl8Jw1JQ+IkhW58tHhRfN+ZXXZ8tdBose7Y+9lk3f3vlX5axLVfOm2Qo27b/u10mkxosnk214odfllZl+9Xq4ePKeZiOV8rubOjyJHdfZp929UX5m+6y1tx2MEMOYYVkb7+1vmrM0/ZIqpv2bfvq33Wrdsyb6NIZkUeX/ABK+1mWuqMvtHmVI/EmETTeXE80zDc6r5i/dX/gNXo42B8qfaSGKnb0IzUK2L28m+GbDN8ryfw7aktUnVFj2nzAcAZ754r9q8E4xjnWPt/0C1P8A0qB7vC0eXFVl/wBO5fmjQtVhVpNkMYC/Kit823+9SMySTNcojN5fy7W+6y/3qVdn2hJvs23/AHk+7UTXfmKqD5n3/NGvy7f7vzV+Iy5ovQ+a5fdKd5sjs2dNrS/Ns/2f7tc1qm9nYb5MNt3+WldCsP2hmCIu7+L+81Z2oWcNqyuJtsf3XX/araPuwH7Pm+ycXq2kpFHcOiMzr/y02fM1czq1mImZ4drs3+t/vL/vV6Bq9r9lkESPv/2v96sn+xPMuGdIFUN9/an3mpxl73KafV+bY5XR/Cs1wu+bdlfmRV/5aV0mi+C0uI0+zW0kok/1u75dv+1XX+H/AA35ipC6SebC67VWL/0Ku20jwe7pFNsjI3fxL826u2jH3jT6vy6Hm9r4DhazTfZ8Kv8AF95m3UN8P3Yr/oeUjfcklexx+DUuJvntmE0cvzeWn3v92luvA9tbx74Y5JPMl+638NdHu05kypT+0eK3XhD5Wgez3Rt95l+9XP6h4TS181I7ZmXZt3f3v92vfZvA8NtZ+XNCqybm/wBrbWJr3glLXfcPDCU2f6z+7/tLS5oyOeVPljeR8/Xng/arQzW3+kfe/dt/47TPDvw1m1TVksktmmaRljiWNNzbm/hr0rWtNhvl2aDZ+cyttuLj+GNf7zVc0fxp4S+Gtrv8PW32/WfK2pfRptjt2+78taqMYx1PJxWIjT+EvQ6HoP7Pfgu+trxIz4gvlVZ4V/5d4f7rf7VfL3xO8UW11qVzc2yQ/N/Cq/xV6T8QrrxV4u1Bry/uZNm/c80jtukZvvVwGv6LolvCEmvFLf7SUvi1Z5/PKUjyXUpb+a4W8015Eljfcm1f4q1td+L3jDX7NdE168uLiVYvkkZ/4as+KNctoXYWEKsqy7VZU/8AHq4vVvEDxSbH25/2ajl9/mNI8xwXjaO/kvC81zkq38VXfhr4qubFntpvuM2395UPjRvtUjFNpXZuTbXNWtxcwtvR8Or/AHt9XH+6OXmel641s0bujq4ZdztWBY6lc6Lqi6lZvt+T96qt96oND8SPdW/2aZ/mX+Km3kKMrTfKV+7RKMKnuyHGpOlPmiem6x4g1WTw7DqTpus5tv77/arndN8Y3drdN/q9jfd+SvTP2E/Fnw38Ra5N+z98YLOGPRPFG21t9Wm/1mn3TN+7kX/Zrn/2zv2SfiR+xj8XJ/Afjl2u9OuH8/RtWhX91eQt91lavMrZVS5ZTpRPWo51V5488il/wkyX1q8KPGzN99tn/oNWPDeqJDdLZ71YbfkZl3V5xDq1zGqok2f4vmrV03WpGm85/kZf4d1eJKj7Pmcj06eKUpczPSdYntpLUI6Kq/xt/wCg0zRdRSGT7T8qbfl+WuIm8WblW1f5f/HqSHxE8MezG1t25Pm+9WVOhOULHcsbScj0/TdesLi8SaG88qZZfm/utX2r+yP8ZP7PtdP0F5lk23EbeYv3W3fw1+c3hvxJPcX3+kzL+8bdu219Q/s0+JLizuLP7HMvyyqvzPt+X+9Xl5hTnGOp9Dk+MpVpcvMftJ8NfiBpXijQX0jUpoXCxK1u2/a23+7Xxf8ADo2i/tiuZwghHifUchzgYzNitD4Q/FS5sZkea8aaBty7Y5drMv8AerkvhvqS3X7QkOrM+8S6vdSlnP3gwkOT+dfrngvVcuH+Kb9MFP8A9IqH1+HhShdxZ9V614ss5dS5eOKFX/dNv/8AHq8H+K3h+w8QeOBc2aKltJuWWRdu5l/3q7L4saf4k1LTQdBGx5vlVl/8e2159qVvqvhPwvfa/wCM7zyYrW1bbGvzM0n8LV/LVCM6uIvH7R89mFSNSrblPEP2ofilYTTxfD3w3N8lqm66kWdd3/XP5a800GG18tprxGD71+X/AHqzLrUpfEGtzarNt824Zt25f4d1bOlw21xM73k3k/dVK/ZMow9LCYeK+0fJYyd6tzY0ux+zTbJtvyt/ndXR6bBtk2Rwb/7qr/E1YunWrmPZ9s3J/GrN96uh0tUtWhRCsq7fkkV/utX0FPkkeNKR1fheOaPy98DK/lbXaaVf/Ha7LSWmhXZCWR1ZdzN8ystcZpt5bLiREkdf41bau3/drorHWLZY2RN25Zf7ny13U/g905ZShI7nw7J5l0jzQ53bvNbf8qtt+Wup0GSe4sY7l/LZ5P4m/wBmuC03WEVvJeZVDbdi/wATNXVafqkLKvkP/q/mf+61bRlzC96J3WmzvGuyHywv3dyv95a0LGRJ5D5CL5qv+9WT5q5XT9UT5N7/ADfe+atSG+S3ka8hkXYqLvbd81a/CZ80v5jp7OQxwqkN4u6SX5m+9W3p/kzRuiJICzt5Sr/EtcpY6hMzjyXhwv8Arfk+Za6PR9UhVkdJPlZ6uJjUl9k6/SfJnt0y+11T541/iWrlxGnlh4YVXa+5FX5qzNPuraKb9zMu5vm+58yrWh9oh3K+/G5d23bW8fh5jjl7plalpv7p5vlLsn3m+7XzD+3hbSWeteHLaaSNpBa3Bcx+5jNfUF1fbbiWG2mVwvytHIn3Wr5k/b4Yyax4akZFDG3ut2zp1i6V+j+FKtxthvSf/puR9Fwc4PiWjb+9/wCkSPQPhVp3274UeHxlAF0eDJPUZQVe1Hw+iw/wptTbuVPmb/aq58FoFl+EXhuRQpC6Hb/J/ebYK1brTbw/8e1qz+Y3zRs/3Vr5PPP+Rtif+vk//SmfPY+X/ClW/wAUvzZ5/faPDNJKjWzfudu7dF8rLWdqHh9LdiiWcfzffZn+Zf8AZ213MypH5ibM+X/C38VUNUsEmG+5h+dvm3M9eDW2JpyPPtS8P2ccbw2ybXX+Ksu+s/Mj8nzpPl2r5bLXX61bxvveF9rr/d/iWsK88mF22TtIFX5tvy1wyNfi2KGn6Z+7RIdqv/HI33t1dLpGn+WqO6bf9nd/6FWMtxNJGjwIy+X8v91mrpPD7Q3EexPOTd/eT5Was/fA1tH010jRPJVPMl2o3/PStiPZGFT5k/e7W3fLTrGNJLdZvJ37dqp8+1qWa38yTfN5JTb8+5vutVfY1MZS/lLcV6n2na+3Yv3o4/l3UT3CNcNDs2rv/hfctZUWpJHI0KfNM3zIrfepW1JLfd+8UH+7WVSXKSS6hHcxyNND5eGTdtkf7v8As1mX29mL2yKryMvlNu+7/ean32qQyTbEm+VotqNIi/NVaGbzmi+Rf7yK38NRL3tjaMixcWs0zeSkm/8AvySfxVWbw+kkbvO+Ts+793dW1ptvNJGj3iKob5nZXqe60vzFd403Bvu7n+7WMom0D8drW+S4ZH8/59u5Fatax8mHDpyzfNurnbJXjkjE0Ma7fl/3f9qt7T3dl3o+N3zJ/vV5vtD7ipiJS5jUhuHsbpN+1lkf/d+b+7Us0011H50d/Hv+b93I1VWvJlZvJ4lj2l/97+9Ve8uvLX7T8pdn3I393+9VVKhzxpuRnatePskCTM7/AGj5lb+H/ZrntQmdg/zso/3PlWtrUmmmn3xztmbd/H8tZjQ/K6Q/MWTd+8+6zVh7bmj7xcaJQs7FJPmRP9lG/vV0Ghw+XdIk21WX+Gqlnbw2bMk23d97/darenyWzKXfcPm3Iy/w1jzIqPLHludDZW/kRmZH+Vk/esv3ttT27QsVudjK8f8ADt21W0ybzIzM/wAu5du5qka6SPCPzuXbub+9/s10RiTUlCIqzTRtve5XZI+1Vki+ZaikaaRNifKzLtdm/u02adIV87Yvy7WZd/8A47Ucl0jqEmhVkm+ZF/i21pH3vdOaUipqGy4j/ffP8m1Jo3rC1aSKzhaG2hX7nz/7LVp310iyNCkPyKvy7X+9XN6ndbn2PtZm+bbt+9WtOMI7EVJH0L4Dcn9mNnI/5gV9x/39r5EvLjhXmdkO75P71fW/w+AX9lxtpJ/4kV/jPbmbivjnVNSdpNj7WOz+H+Kv2zxRV8lyH/sFj/6TA9biRp4XBp/8+1+SM3Uo08x7jfn5/mqsq7ZFdE3JRMzySNC+7C/9805WhXYnk/8AAq/GD5unH7Mi7DZbtjoiov3mX+9V2wt4X+T94u5Nvy/w1Ss50WZe277q1raX50LeZsYrv/4FWVSR34enYv2cKWsfko652/w1r2Nu7bHmiVdz7dqr/wCPVTswn+p6H/dre021mST9yjH5d25q86tU5feZ7NKhzbGjaWO0LsRv+ArVmbTYfLV4U+Rm2/3tv+1T9Ftdmdk33X+dW+9Wu9jI0QSbazb9rs38Vccqx6csLDksYElj5cy+S7bmXbTrO1MczIn3vvPGyfe/2q3bizSOZX+/5fypueq0luisu+H73zfKtctSp7xEKMea5Ts12yJNCjbmXbu/hrStbHdMzw2zN86tuamR6bsXZNc7Yt22Jl/iq9HJDHvhhTajbfKVm+7WMqnN7p6NGjHdkUlq8VwvnO3D/wAP8VX7VZlX9zMrBfvr/dqBbWGT5JnZkV/4f71TxK/mHy5t3ybfu7aUqn2TdU/7xMq+QPueYjfd/i/3qv2ckMdwmxF+6v3U+9WfHdv8v2mZdv3UVa0tPnRmTYjfK25mX+Gp5kX7GPN8Jq2tvCrDyIZLhf8A0GtCxdEmTyYWbb/sVSsxC7bIZd/z7t0f8Na8LfZ4U8652/7qfNtrOPvBKjMkjmmb3PmtvVk2qv8Ad21JJ5jhEtnXaq7XX/2aljjQS796h1f/ANlpJpIYZG8l2Z12/e+Wn/DMPZ8xJNJ5Mi3Lwxt8ir5a/wCs3f7VVNT/ANcE+x7mkXcy/wAK1LcT+XumttpZl+dmXczVVZXkb7+1f4/MXdR7xZQkS5+yqgRYXVv3qqu75f4axtR03zCfJdUZXbezL/rF/wBmukktZnkVPlVdm7d97d/dqv8AZbwTTP8Ad3fP8zf+g1vT97Y5JS5fdOSns4VVoY/MKq+7a3zUyb7TaxbJnUpJ97+L/vmuhvtL3R/Oi7JPm3b/AL1Zk2kpGvyJ/Fubb/EtVGMFscdapIxHs7lIV2Ivzbt6rVO5tfLZkhTc33n8z+Fv9mt2Sze4ZkhdURX3/wC1/tVV+zzTXCwpD/eX5l/8eraPxnFUlKUdDJWHazI80bf3m/iVqj+zwzbZ4XV5P4f9qtKS1n3Sp5MZ2vt+b71VdxRtk0Ko0fzp8lbQ5ubmZySkQ6XZzWZfyY1USRf6tvuq1blnst3CD5/kVHkX5qzrG3tpJHmRFRfvNWhptukczfO3m/df+6y1jiI8xth/eNuFVt5Gmk2lmRVVdm3dWrp8iLIqbI938G7+Ksm1ieR/Jm+VPuxf3l/2q2obPzlXfyisrPu+VVbb/DXBLm5fhO6n8Rr2az3qpsTLSPh/l+XdW1DC6tvfj/2Zf4qy7PfGhcvgr9zb93dWxoMkLbo/3bq3yozfw0R5Oa3Kd32OYv6fawSSfuYflb5vMVvl210em2tnJILxE27flXanzNWbpum/Z2Xy03p/Guz7q10ej2SWqom+QKr/ALr5q7KNLqjnre7EtW9u+7HyiX+Fv7q11nh9YVkjffub5vm+7trM0tUm83z0Z13fvdybWat/Q7GY7fnXbHK2/cnzbf4a9nCx5fdPLxEpcvMdP4dl86QoXj2/xr95v96uls13Qs0yYXftiXZu3Vy3h+N2medAw/vN/wAC+7XXabInmrNC7bV+/Htr16ceU8mUpc8jZ0+N5IfO2Rqq/fZf4q3tPhtvmR9x875YpNu1lrP0dra6mR0RZ0X5dqr8rbq29Nt2a3+R1ZfuV0cvuj8kZvijw1D4im07R9jbFulnuIV+bzlX+9XM/Gy1v9S1y4mtbO3a2tYl8r+Flb+Fa9C168+w6em+5hiNvas6SeVukjWvK/FGqalqmmh9Vto3W8uFWWSPcvyr/FX5/wAQ1JfXbfZIpylUnc8X8eeHZta1ybWLb5FV1WWNX+62371cpJ4ZexvDeQ22ySb5ZZFf/wAerufF2nzN4gFn9sWG0WXc25du6s34gK9uW1CwRo08pYov7jSf+y140Z8kdDX2c/anCeLrG51BbPTYUzFDFueTbt3N/F81c7rmh6Vo9xb3J3Mm/dcRzP8AKzL/ABV1Hi37Tp+mvcwzbxtVXX/0LbXnmuapNHbyec6sv8PmfM1KnU925208PJHH+OteeHVnuUvFmXzf3Xlt8qrXAXF9f6lrTzTfvdv3lX7zVf8AF1xbbpHkfbt3b4/vLXF33ixLWP7NZu25UVmaP79elRqU1DzPNxFOUi94pu3Wb/SXjjSaJWVZH+aua1BnuL5Utn3/ACfdVayLzXLm6uH865bYvzIrUln4iextxIjru3/e/irqp+7Gxx1Ixeo+4kuVvEm3qJd+1m+9V688Y3NrE9sk25FRfmb5dv8Au1nfbLa6ZLmG5Vfm+633m/2mpdc0u2uLdZvOVt391f8A0Ks5QjUiuZkU4zj7w/T/AB1qsjecl4yOv3Nr/LXTeHfHF/HeIl5DvWRW82SR/u1wcdu9nHsS2VlX5ty05fEV5br+7Rvlb5GrhrYKnL3oo9Cjip05R5pHvmg+Pvstiz3OpKv7rb+5i3sv92uq8G+OLnct+k0LIzK3mXD/AHW/u7a+b9N8ZO+62eZQW/i2/LXY+F/E1gq7Jnkd2+4u793XkYjC8vvSPrsHm0JRjeR9g+Cfixpt9dLazX+2WaL7sn8W3+7XoUnjbzo4kv7a3hWP/ln/AOzbq+V/hb40sLm7hTUtSsYnj+W3mZtzf8Cr3Dwr4ZsfiRdIlz4h2Sr/AKpreX5WX+9Xh4iLjPm6H2GHxP1ilzQ2PbPgb8XvD2k+K4rO5hZtr7XkZNyqv96v0V+EvjXwS/h3Sdam8QRyHd5SRRy7V/3Wr8ytD+DWq/C/xBJqWy6u2W3Votr+Y0n8Vfbv7MPiDwV8QPA9nZ23l22pW67GtWXay/8A2VVQxUcLpHqcmOnSxVLlke9fEm5XXkNnpTxzwrubc0vyrXi/jBr/AE+5s9BFk0TSSxsixq2yuzuvBOpeHrq41J/Ekjxxtt8n7ytu+9Whpuj6d4muLC8lf/j3n/f/APTSP+7U1sd+/wDfPNq5fD6tFwex+cn/AAWe+FltoEnhL4hWdm0Dx38lrK0b71aSRd21q+JJFh+dJn3/ACKv39qs1fpH/wAFydPkvvhBaa0ty0aWviq1eKGOL5Nu1lZq/NqOW2WH5IfvV9dklT22D5vM4a9OeHlb+6TR3B3LDsVJVT5P4tq/3aqXlw0jL+53bvl3K+5f+BUt9HtYXNtbb327d2/a1Q3Vx9mjbYfkb71e7GJ58pe6JhPJV03A/eaRvvVY02HzJH859yt97/4mqdvM91j7rBv4v7taVjbyXDo+9UT7v3PlrooxnE5akixpNql1JLNCjE7vlX+7XRWNnD5j7JG2/wC0vzVSs7ZNqbvmbY3y+Uytu/2a3NP0maPZ8m4f3mr1acfcOCp/hJtN+aMb/wC9uSNvlatrTZHWZSibv9pvmaqmnw+Ym/ztxXd95P8Ax6rDM9o8To+6Jv4dtb8hyVP5TV8x2UwRuro3yyrTnAZyqPuz3A61QhuraGRnh+T5/nZv71W42IgDOwchfmKdCe9ftPgpHlzvHr/qFqf+lQPoOGl/tNX/AAP80W7W6e3kZ/l3bNu5n/hqG4V1uns5vnh3L96L5vu/3qqTagkLi2hfci/dZqurN5kKPcvuVmX5t/y7q/FfZ+8fMRj7xE0KQqdm5Ny7kX+9VGUw3ELXNs+1W+5u/vVbkv8AzJJUEGWX5vlqgt9uk8nYvlw/Ntb7qrUSlOMdTejR9pLQp3EaMuxLZcq25JN38VaOi6Dc31wj36K3zf8ALP7zNTNLsXuLhJng2RK/ybW+Zq9B8D+F/MxvmZl+bylk+9urSjHmPUjg/ZxViz4b8Jpu37I/m+aWTZ8zf3Vrr9J8NzXStvdVLLvTan/oVaPhXwv8qXLpGm196f8AxNddHoPmW5e2RY2j/i2/w13xlyx0IlT7HKWOhwyQ+fCnyyP/AHdu7/gVSX3h+2sbf7TfoqRw/K9wz7dtavi34heD/Celu80P2iWNNzxqnyrXgHj/AONWveKLpraFGuEkbbb28K7VVf8AaojKXNZI8vHY6hho8rkdF4u+JnhjTZJrawtZL64Vt22OL+H+9urzbxp8SptXuks9ShmuIZEZoLGxXcqt/dZqd9ovI8/29fx2X96GH5mb/ZrMvfHGg+HY/N0eFUm+YJNs+at6cT5rFZjXqe7E0re71W+hW5fw9Z6fab/+Pf7jSL/FurE1q88N2a74Y7fdJ8ySN83l7a4vxZ8ZLydZYU3B1Vv338O6vMfEHxQ1nULje9zu/h+/92tOZHmxi/tSO28ceOLa8upIba537fllZv8A2X+7XmuvaonL72VV+4u2sm98WXNxNsmOVb+L+L/easi+1a5jmb59zN/C1OS5jWPvfEUPECbpGmhfhvmaNVrkNc08M2/zthVvu11VzqRZX85/9la5/UJppH2STKp+6rNS+IuMjgdfa5t2b59tZsuyZTMiMB/FXVa5pcNxGyfL8rN97+9XMeS9rI9q6fLv+9soiacxVjupo5vkfdt/u1safq0b/uZuVb761z90r2VxseHZ89WLe6SObfv20+VE/Ebc19daPfRajbTzBo2Vt0b7WX5q/Ur9lfxR8Pf+Cqn7Hd9+zf8AFHUoW8b+Ebfd4cumf97Mu35fvfNX5VLfJdW/7ybmvQ/2Rf2kvFv7LXxw0r4keD9YmhaG4VbpY/8AltHu+aOqjOVOV0Zypxloh/xm+APj/wCBfjvUfA3irR7hJrGdlaTZ8rf7S1ylrNtkP2lGRl+Wv2P/AGkvg/8ADf8Abm+BumftB/D23t/tN1oyz3/kr92T+JW/2lr8wviX+z/rHhXV5Ib+w2Osu1GjX5f+BVxY7CxlHnhHQ0w+O9lL2VTc81kbzMTfcOz+F6csiSKHn4+X71ad54N1LT5pUmhZhv8Au1XXSX3bJoZNjfd+SvD9nKOx7Ea0ZRvGRf0W1TcjmbP+7Xrfwn8Ra94baJ0+dfN3bd/8NeefDT4c+I/Hvi+18M+GLEz3FwSyR+aqDCqWYksQBgA19sfAL9mTXPh94c07xv8AEn4WXKabc3rQ2utSRM9rLPGQZI0cfI7qjKSoJI3DI5rqfDXEmb4T2uXYCrWg5ct4U5SXNa/LeKettbb21OrBYqFGpd1VF+bS/M3/AID+NPFuuapbaVbabMBNb7omb5fvfL8telfDAPpPxis0u5gGgvplldsYyFcHNerfs1/ALxv+0L4uvx8EPA11rv8AZNuJr0QQrBHboc7VaSUqm9sHam7c21sA4OPIDN/wjvxWvG122msmttUuUuoLiBlkhbc6lGQjKsDwQRkGv0rwi4c4gwmX8T4DEYOpTrSwcoqnKElNynCpypRa5ryv7qtr0P0bJ8fh6mFqz9tGfLFttNWSVz6x0m/1LxIyWejwxzHZt3N83/Alr5P/AOCjPxU1Lw/qNh8HP7NutPm1CJb+XzomjeSFW27l/wB5q+mf2Rv2gf2Z/A3i+01r4v8AjmWCzjX97bpo9xMR/s/IhrH/AOC3XxO/ZN/bL0bwX8Qv2Z/FIvfFnhmdrK6sptFuLMT6e4zw8iKvyt2Jz6V+W8OeDfG8JOtXyzERt8MXRqL/ANtPj804lw8aqjTnGUX2aZ+cljeJG2x9qL/G3lfMy10uh/d27Nz/AN1W3K3+81QwfC/x6DiXR0wq4BNzGM/k1a2mfD/xfbsslxCRwBtWZPl/WvsKHh7x1DfK8R/4Kn/8iefWzHBT/wCXsfvRPa77VUd0+fczVq6bqCNIiXLrH8zMn8K10/wt/ZM/af8Ai3FLqvwy+DfiPxFDbORNd6RpElxGhPYsgIB9s5rJ8UfDD4l+Cdem8N+N/Ct5peoW8o+02Oq2pgliPoyPhh+VdFDhHimtiJYaGCqupHeKpycl6q118zzKuKw6V1NfeXtNvLaRdn2be67f4/vVvabqVz9neHzo2b7qf7NcVpmm+I7OV2ewQqwwVMoOa0LdNfRmPTccBfMHAr1o8B8aR/5l1f8A8FT/AMjjWMoKWsl953+l+IJo40muXj2fdbzF/wDHq6XTdYeO3TY7IsifJN/tVX8Ofsh/tc614ei8VaP+zT41uNOuoTPDdQeGrh0nhIyHXCfMCOQR1HSuT0/xJNp90Y9UjmjeJjG8EynKEcHI7H2rmwfC3EuOlKNDCVJuO6jCUretk7bdS/rVKMdZI9d0TxB9qT53j279v+9WvY6hM0e+bbt+6nly/erjfhJ4Z+I/xbvZbH4Z/DvX/EM1oGLLo+jz3YiRv7/lodv44rofHng/4nfBeC1v/it8LPE/hu1lfEVxqvh+4hikb+6GdACfbOa0fDXEFPFrCvC1FV/k5Jc3/gNr/gRKtSkubmVjq7PVIHVUtnba33m37q3tJ1a2hZPnmD7l+VU3L/vV5D4W+JehaxqbWmnXjj9wWZdjK2B15Ix3rqtL8QXgHlvcqyt9xll2s1cmNy/MMqxXsMbRlSna/LOLi7PZ2aTsZ+0jKHMnc9b0nXEaFZELb/uu3+zWwutLJbhHuVBk+Xb/ABbv9mvMNN8S3knV1ZPvPHDW3H4ihZmfzFLK+23X+Jm/2v7tZRkYVI8x12p3ztIHhRn2/K+56+cf269h1Hw0YidnkXW3P1ir25fEFtNs3ncGZv8A9mvCf225mfUPDsbFDthuiChz1MVfo/hXOMuOcKvKp/6bkfScGQtxHRf+L/0iR7X8Eiv/AAqDw0zbVP8AYtuqqf8AcHzVta00ccKujr8q/Kyt/DXJfBzWBb/Cfw/ayFcNpFsu70+QVs6priyRy2yPGgb5EmX+Kvjc7nbOsT/18n/6UzwcfT/4UK0v70vzZT1a8gaI/wCsLKm1PLX7v+9WPeXlzG2zf5X7rb5n96nzal9oXM25fl+eRW3M3+zWPqGoeZZhH2q6tt3LXhykZRj9opa1evNseFG2L9/y221zeoaghDw/K2373yfeq7rl5Naq+zcu51+VU/hrjNa1L95LZpuRG+40b7WrnlI6OVnQ2upfMsPU/wADK/y10/hy686PY94uGT7u/wCZq8xt9Uhjx5LxsZF/heui8P6w9mqpDdLhk+7t+ZWrn5uYJHqWk6htjMds7P5cu3bUlxcOYYkhufNRm+f5Put/tVyFr4kmWMrvWP8Ai8xadceNINy5mZN3y/KlVKXQn3DYuta3XG9Ewyu2xm/h/wBmsq68QQrcF5n4b7i/7X96sK41pod8KTbHmfcm5vvL/erBvte2/uft/wC7VfvM+5mrKpUHGPvHZT+Irb78L+Xt2/x1fs9Ze6aVPOXe3ypt/hryW88WbZP3Lrvb5dqr8v8AvVd8K+NppPkdN9wvy7mrGUuYfL757tpN9Ctp++mjdF+XbI3zNVxtW+0Ls8tk3JuRf4a4Gx8UJ5KXM3O77vzfe/2ak1LxRND5bs6qmzdt31nKRfL75+U+hq62ux4WKbNvzPW5ZyILVLb93sb+HfVCz08xM/75iPvbdv3auWcczNvhEinc29W/9CrwZYj3/dPu6dGESbdMrK838Xyr/u1BdSW21Uh8vP3mWrtvbvJH+++Z/vblqG4sU8l3jeNmbcrttqfbc0uY19jymTJawrGrxupZf/Zqht7M7nkdvvfw/e21oNZzIo5VW+8yqtNa3m2s8KZPy/M38X96nzc0feJjGX8pnbrYMqPuc/dT5vutUkfkxzRo/wAzL8u7f96l1K1aw/d7Mbf4aybi72wvs3Nuba1ddOMJ8tjjqSlGVpRN2z1KZv8ARk3IPmZf7taH2wMvlum4R/3f4a5mx1DzIx+++WOr9jq03mebD8m5NvzfxV0R+02YytLlsabSJJH52/btb522/wDstRRzJHCd8zL83y1Q/tB4Zt/nKGaL96zVWvNSF0u9PmCp8u6nGJjKp7wanqkJ3fPsb+9XN65qXmNvtn4+7uq1qV08bb0df3ifOu6sDVt/mO8LqC33Pn+7W8Y3OOpU98+pPhtMJP2TDM46+Hr8nH1mr4pvNQeRmdP+Bsv8VfaPwzJk/ZBJHU+G9Q/P99XxV9jfyykaZ+fb9/8Air9n8U3bJsh/7Bo/+kwPoOIkpYXBN/8APtfkit5n2jekPyVbs45lVP7n8dLY6f5cjK/zO391PvVah0yaObePmX71fjT+L4jwqcfeJbWGGWTZsZtrfK38Na9nDOP+WyquyqMNu9u2x0zufcu1P4a0FjdRsRN/z/w/w1zVOSJ6uHpmzpLQ/fTdt+78yVu6bP5bF4ZmUMvzq38VYOmyeaodE3Bn2qv92t3TYXkj/h/76+9Xl1tj2MPTqy5bHRaS0yrFDbJnd/e/hXdW7bxpHMvnOz7fmTclYOls8ewbNh2fKrVprdIzQpMm9N38TbfLrzKn8x6fN9mRLfLN9lZNiqJn+833mqCaF4UKIONu5d396nteRNuT95Ii/L8v8LVB8/nCNPubfvK3zVnL3o/EKPuj2urmRYXR1Xy02/8AfX+1ViGNIdvnf6xtv3kqCOEtcbx0/ut/eq9DG80zXMyLv+6i/wASr/FtrLm5TeMeaRHDDCyskMLL+9+dV+9T4983yP5imrMa/wACIu6FdvzPtZqfDYvHGEeFl3ff/vbqcZc0jaMeWXMRWdqJGXZCqhVZtzN8zVo2cc8kiwoissi/d3/xUsdi6yD5l+X5kbZ81XLS1/fAnaVX5tzfxN/dqvcO6j7xZhb7PDEnnMm5/n2/xVp6fcJBGmx9219r7vmZqotGYdr3KZ/etv8As6bvlqxbyPCqOibd33f722pjE0l8HKzRhvLZvnuX4ZPmZabN9mSHYtz87N8rN92oLWN5GV0T5Fb5P7q1dtbW2uvn2KxZ/wCLd8taxjDm945alP7JXjt3kjFtD8/zbfm+VVpYbONbiGaa5ZHk3fNt+Vvlq5Ja/uWtvLjc7N+7+7/s1at7OG4mZIbbb5cXyfxLtolK0eU5qlPuUfLea3XyYVSXfudZPvbalW1m8tH3/N91FVf/AB6tBbRJmZPOzt27P9lf7tLdw+ZNvs0YP91/4qPdjojkqRMZtJRoUd33srbn/wBms7UtP8uZt8O8r/t11E1q8jI43IPN/wBWqfLVHUrdPLf7L8kv3mb+H/dq/djpE4pf3jkrjR/Oj3o/l+Z8u3+Kq91p/kyhIUyqp97+9W9dwpHCNQuvmMfzbV/hqBrdLiX5+sf+qjZ9rN8tPm9/U5qkZcpzd1prsyPGka/N8y7vm/3qrSaWv2NIXdi7S/d8rc3/AH1XSR26XkYmlh2qq/6lfl/4DTZoZGby0ttzR/L8rfw10c3uxSOXl5pXic3HbzQ/PCnLfK21Plb/AHqt29rMsS7y33Pk/vVsfYXj2OifvW+5/d2/7VO0+1mto0e12sGZlZv4VWolyy1FR5o+6QaXYpDDJvdoljTbW9pcKKqQp+88xPn2tTdPh3JsdPmb/a+ZW/vVqaevl25hmT/a8xf4q5pS5Zcx6VGn7xNprOV85E27n+833WWuj0S1SSRU3xq0i/Lu2/LtqhbKkdvDC8O5FTdAuytLT1vG/ewwxp91d0abWWsYy5p8yPTjHlh7xq24mnb/AF0gKvteTZ92uj0mFLWQIgzt+bzP4t3+0tZGnybo4U+6Wfc3+1/tVu6fcQrMru6nd8q7fl3V6VA4a1O0DpNNhmWJrlId25f/AB6tbT2hFu0LzK5Z13R/3qy9KuI1hMPkyIsjbUb7y7lrU09vLmRZvnbdu+58q17WHieXVlyx+E6HQltrq4/ffu4mTci7f7tb2lW9rCq+SjFF+98/zbaxNDt0jbYiNtbd5TNXR6THNGoT5X3J8m1vmr1I+6eZWjyyOj0K/kZXRJtkTKzJtT5l/u10cMrwr5s21UZ1ZGVdzM38W6vN/GnxS+FHwZ0ubW/iv8RNF8NQRrvim1jVI4Gb/dj+81eV6X/wV2/Y68SfESx+EXwf1jxT8QfEOqXCwWGm+E9DZ47iRv7rSbaUqnLDmMXWoRjrI+ifFFxN4ovLlLDUpporO6+zeW1rsSPavzLu/irzj4ta9Do+mwW3nLHLs+WGN/vf7TL/AA16N8PdJ8Q2PwzvbzW9HurXVdS164e80e8b57GRtqrCzf3q+V/2n9c8Q+F/Fl9qv2BkRYPKlVm+ZZP9mvzzMq31uvPkFR92XqUfFHxK0S1vjeXV5MWb5Yo9nzbq4rV/jgl9pc2lb12Ryr5rfL83/Aq8S8V/ErXvE2rD7ZD5QWVkVfvVreCNNe81S3037MzyXG2KCGOLc00n8Kqv96vLo0eX+LK1j28HSlW+E9b0O4TVtLuZtYmVbaZF8qSR2bav+7XlXj6+8PWf2m20HWFnjjbb8rN+7k/iVq/RLQvEX/BK39iHwLpfhP8Aa9vYvFvxBvLCO6n0S2iZrfT2ZdywuIm2q397dXz98Xv2n/2cPi28+k+B/gX4L/sC6l22tvpFh5U8a/3mk+81YYqthcLCNRPmb6I+kynI8djHJVockOkpdfQ+DPiHqE0in7NMvy/M7Mn8Neaa9qH2e43wnKt99levqT4zfs122oeF9R8f/BZLzUbKzRrrV7Fl3S2cf+z/ABMtfJmuXCtcM6J8snysrJt217GV1qWLjzo+Wz7L6uXV+Uc2oQzRGTfuVl+7TDaJ5auj42t8q1Bbyfak8yFFbav3t33qdb3l/IzWboqRbtyyV6dSPu+6fO/FrIms43hLF93zfdq3b69cK3kzbVj+7VCZXLH99vVvl21JDNazb4Xhb93/AMtI/wCKuaUfslxlKPulu+Wa6t0e2+T+/tqte6XDdTvDDcyRr5W7bH/erofDdmLqJEez3p1T/dqxqHhKFlTyf3f3m3Vl7SMJcpp7GrL4TibGzmiwZpm3762H1XypERHb723/AIDUWqaOIV8yCbdu/h+7Vnw7b2cciXM0KynY29WqKkY1I8500ac6fum34RuYlX7Q8s3yvtVt1fZX7H6+J45orvw94P1KdZFVHaSDaqt935Wavmv4dX+pLJCmleBmuhD83l/Z9yt/vM1fcH7K/wAUviRpGoW39saVss/K2yq21fLk/hXbXyOZ1HKL5Yn2mSynbl5j6Ct/jN8fvBOoQf8ACQ/Bmxn0+4iWBdQaeFp1hX7zNHX0B8F/FHw68dWUmsP4e/s3VVWHb5f7v5t33q0fgN8Mfh/+0d4GfTfEunafq10sH+re42yw/L/Dt+7trzX4ofDm2/Zb8WQXmm3/AIo8PWMl1HEsmsJ/aFjJu+7833o1WuOnhZVKfPDY6qmKiq8qM9z6bh1mx0uyntteij8xvm8xdzVDo2uaKshSzmhRNu5mZvvVk+D9S8U+OvB8esaL4u8H+IbZXVWls7hkdfl+bcG+81TxaRYrI/2rw1a7JNvzRp/DRWoxjOMJI9HBuFSlKPU+cP8Agql4Jk+OPwA1qz8OaysI0OzW9WSKLclxJG27bX5RWNvNcQpsdlkaLf5cif3v7tfuZ+1/8NZvGf7OHizw74X0mSGQ+Grho0tdq+ZJt+Va/FbS9F228NtMn76HdF8y7WXb95a+q4f0pzj0PEzWpSlKHIjAk092jbejJu+by2Sq8On/AOkI8IkV9jfLXWalpfnw/uY22L80rb9rVmLp7xyDfNhoX/1m3d/49XvQ933meZKMTMtdFSRUh6P1WT+8v92tWx0l9xtgitu2r8qbttWrOG5k3iHco+7u/vVtaXYo0xSGwwy/c3fe/wB6vUp8/JqedKXNMP7DSOZI4fMYx7W+Zf8Avpa14fN8xbaFNyMm5l/u0+xsbn5oYYWd5k2r5jf+PVLb2KMyTeQ25V2bm+6tehRjE56kv5SG1Xyo3REZG3svltVhVuZlIebZ/wBM1Tdupz2vll3Tbs/3/mprRzQozv5jOu7738O6uuMYnLU5+UqyjbGQ7q3z/wDAdv8AerQtVij0gLGRsERxg9uaxL5UbytkfyMq/Kv96te0YnQctnIhYH8M1+z+DC/4Wcf/ANgtT/0qB73DP+81V/cf5oox3010yuAr/vfnXftWr7zxyWfnfdVm+TclYcM8yzBEtlKbN8rfxLVqW4to7GPzptm3dsXdX43y+5ynzXLEbfXz3UiIjx+WybvmqCTU3uplhmdpG27UjX7u6sqbUJlkM33f+esatuq7pc0zP89tuf8Aux/e/wB6ueUJnq4Wmd14TXy496BZtu35dm5lr1XwXpUPmedNucMjbFZfmVq8q8Ntua2R0+VW3/N/s16TZ+Jk0W1+2XLybmXcqxy0U3GmejKolC0j1C1utK0mxjtpkjik270jk+XdXPeIvjBCt0dK/tCO2t/mZG3fe/3a8a+KX7QFh4b0G41XVfENvbCO3ZYvtT7mb/gNfMPij9sa2ub+7+wXLXcmzylupvlX/a2rXTCPN77Pks0zmXNyYf7z6R+MXxd/tqS68GfD1GvLuOLdK2z/ANCavFdW8ZeKtPjmzYMpVN0sjPu+bdXkl1+1Br2m2d1YeFXa2mvtv2q6VP3jViap8dL+3sxNqV5nd9/b/FXVGPLE+Ylz1HzTPUNQ8eeJFZ0eGbbJ+9dpP8/drC174iefbjfcsJWVn2r/AHq8l1v9oK61i4Pkv5SL8vy/xU3TfiVbatcb9SRdn8at/FS5pyHGnI6O+8eJcSPbTTb9rbvL/u7qxbzVIZpH3zbPn/heqWqSaVeRrNZ3kafNu8tq5m8vHhfyU3My/wAX96rHH3ZG7ea0nmGV/vf3lqhcaw8iv87b9m3czfw1k/aJliZ5gpo8x1YPnf8ALu8tarlHzIsXGoIq702/7u/71RsyfK6HH91aPLh8zZs3N95GpJGT7WyMmfl+8v8AFTjyi5ub3WZl5bvIqp94turndctZll+VNp3fIy11zL5ZLu+1v4dtZ+paa8zIh+9J/t/doi+YRzGrabbapH50LqxjTc6r/erDuLe5jZUmhZWrc1TQbzTZmvLNPutuZf71XdHt9K8Tx+S/yXP93/apgcvHJNGwTa3+9UU008cyuj7Sv+1XZXnw98lWm3sm3+KsS98Nur70+b/ao5Zhzc0j7w/4Iy/trXPgPxHJ8BPG2syHStcl8uykuJd0ccjfw7W/vV9J/tPfBXQfE2qXCf2bGGaX7yrt/wC+a/I7wfJqvhXXbXXtN3b7W4WVNr/NuWv0j/Z9/aY/4XB4FsX1vc95awKl0vm7pN3+1upe05IcsjlxlOM+WX2jyLxP8BbnwrdXFtHbM9vJ/FJ8zf8A2NaPgD9lez+IUkVnDYXEcsjbH3Rf8tP9mvr34V+H/B/jLWLew162txFJLuZW+b5a/TL9j79jv9iC60Gz1iezivtUZN/79fLVW/2a5vqcefm5vdMKeIr83LE/Jf4Xf8EsPi34D1XTfil4e8N3WomeZbGytLOEtJLLMwgRFUdSWcCv1c+LP7FH7TPiv/glb4F/Zm0XwbHL4z0bWUuNU0ptZtlVIVlvGA80yeW2BLFwGP6V2/8AwVM8C+DPhz/wT88Tz/D7To7AwalpTwT2rkOrC/gIYMOQR61478aP2hfjrov/AAR2+HXxa0n4u+IrbxRqPiFYL/xDDq0q3lxH51+u15g25hiNByf4B6V+xcN0c8XDeULLZ0kv7R09pGT/AHvsVyt8sleFubmStK9mna51QbvP22r5ena/5nz1+wj8Uf2+/wBnv4ieLvhB+zj8L31jU4YJpfE3hXWdNZ0spbcFTMR5kRjlHKBQ37wlVCudgr5v1STxv8S/iVdzXenXepeI9e1qV5rW2syZ7m9mlJZFiQZ3tIxARR1OAK+1/wDgg5d3V9+1B4zvb25kmmm8EyPLLK5ZnY3tsSxJ5JJ5zXi3/BOOaztv+Ci3g271GaKOCHXdQlllnYBIwtpctvJPAAxnPbGa/dauc0sq4lz2vHCU/bYahRqynFOMqsvZ1JWk7vRciUdLpbuVlb7TgyDnlmOV3Z0pL00ZN/w6k/bz/wCEN/4Tb/hRNx5H2P7T9h/tS1+27MZx9n8zzN+P+WeN+eNueK+f9a0XWfDer3Xh/wARaTc2F/ZTvBeWV7A0U0EqkhkdGAZWBBBBAIIr9gLLTtXg+NEfxdvP+CvWgz266gJpPCudPXS2t882whF7gLs+UPzJ/FuLfNXxf/wWa8TfA/xp+1NaeKPg74s0vWLq48OwJ4lutHvFnhNyjMseXQbS/k+WDhm4VQQpHPn8AeJmfcQ8Rxy3HU4VIzg5qdKlXpqnKNvcn7aK5k09JxtrpbU+FxGFp06XNF/e1r9x8jV6J+yZ8GrH9oP9pDwf8HdVuLmKy1zWY4tQlswPNW3UGSUqTwDsRsMc464OMHzuvpj/AIJDaxpGj/t7eDjq8ir9pgv7e2LQq2Zms5doyfuHryOe3Qmv1DjDH4rK+E8fjMN/Ep0aso26SjBtP5PU5aMVOtGL2bR9B/t+f8FMPij+zH8X1/Zg/ZTtdH8PaH4J061sp5TpiXDNJ5KsIUEmVSKNGjX7u4srZbGBU3xS8a6N/wAFMf8AgmdrPxw8d6DBZ+P/AIXXM7vdaXDhJAqxvJhWJIilgYFlzxJDuHA2n5I/4KM6dqOl/txfEy31QsZH8TyzIWjC/u5FV4+B/sMvPfqeTX0x/wAEtZ4fDP7BX7Qvi7xJLt0ltMnhXfapIvmLp827hjhyfNiG08dPU1+HZjwtkXDPAWU59ltJRxlOeFn7WP8AEqurKCqKUt5KanLR300XY7oValXETpyfuu+na2x+ftfTf/BKLUf2b/DH7TD/ABA/aP8AGGk6VbeHtFnvdAXWkHkSXqkYfcwK+Yib2jXG5n27PnCg/MlFfvfEOTriDJMRlsqsqSrRcXKFuZJ72umtVo/Jvbc8+nP2dRStex9n+Pf+C2P7WNx8X77XfAF/okHhaLVW/szQZdGSRZrVXwgklYCbc6gFiGXBY4C8Adb/AMFvvh94SkHw2+P8PhtNC8S+LNLki1/SnWNZmMcULoZcEF5I/MMRfaeAgJG1Qee/4J4/sVeFPBvhtP29f2xbiHQ/Anh5Fv8Aw7p+pKQ+pzKQYrlk+80W/b5UYBadyuAUwJPEv23v2rPEn7bn7RE3jK2Se30aN107wjpV4yRm1td3ymTDFRJI5LuxYgZC7iqLj8bybI+H/wDiIuG/1Yw8aVDL4VIYmtBWjUlKKjGi2tKk4P35yd+V7tS0O2dSp9WftXdytZdvM+9viB41+P8A+z//AME9PhRe/wDBPnwTHqtpcaVbya3eaZpR1G4h3wCWSUQ7PmLzmXzHKfKQBhc8aH7A3xa/bD/aL8K+OdC/bs+Hvk+CJNBZBqOu+HhpjTBwyzRbNqCSLyg7M+35CBzzxhfFL9oTwr/wRz/Z38Ifs9+CtMuvF/i3VLaW/mXWNVf7LZsx/ezBVHyxGbcscMe3IV2Z92Wdn7LP7f8A4e/4KW6R4i/ZA+O/haXwtqfiHQ5xa6l4U1WWFbyMDMkaBtzRuqfNtYyRyKrhlx8rfjmJynM8Vwni8wo5ZCphJV51Fj2l9a9l7W7qqHMpvls9bpW15bXZ2qcY1lFys7fD0vbY/MrTrrR9F8Y3zaRcNLYRzSpaSMxJki3/ACEkqpOVA/hH0HSuw03xhbM0Sb9wb5n21x3x68D3/wAAfip4i+GGuXcc1x4f12fTXuIiGWQxuyh+CcZABx1GcHkGuWs/Gezb9nmk3L8zqv8A7LXoeM2Ko1uLoVaMuaMqNNp9002n81qZ4JNUrPuz36w8UW0MiTJfsD8qqrf3WrorHXkkjk2Oqv8Aw/w14To/jRJBsjuYyv3fvfMrV1Gk+KN1mN7szM/3Wf7tfkntPsnXyzPYbXxJCzJbXM3O7d/eryX9qHUBqFzozK+Qi3Ax6cpWxpOveTIl59pX7/z/AD7t1cj8d9Sm1ObS5pX3YSbBAAHVemK/SPCad+PcKvKp/wCm5n0vB0X/AKwUm/73/pLPYvhrrX2X4baNDblo5RpUI34z/CK2brWofJWFN3yr8zbvu1514A14w+DtOtt64FlGo/2W21oSa9DHj52ZvvL8u75q+Lz6rfO8Uv8Ap5P/ANKZ5GMp2xlX/FL82bd5qz28jzJDlJH+Zay7zWk8xkfdIn3X2/w1nTau/mFEvFDMzNKzf8s6y7zUbyNPtI2lm+bbI33lrxZVDn9mP168Mil5H37G+dVrlNWuLBlNyke5t33lq3rmrbYy6zKnz7W2r8rN/dWub1LU3+wB3dmWOXZ83y7Vb/0Ks5VC/ZsS4vHjme5hdT5b7tv8O7/Zra03XEtG37NjMy7Y9+7/AL6rh5L65N1FbQyYWRWZPM+VGVat2+v7HTznjR2+XzKzjKP2hcsz0+HxAlxalPti/d3P8m5WqHVNaj+R/tMaFdvm/wCzXF2+tQSQokM21lT5WWqV/wCJHWNXlfczfL83zNVRkZ8h02peLIYrzelzteN1Xds+by/7qtWRrWuJKyTWz7U+66yNXKah4ofzG/1mf7sf8TVg3niLzGZ5pmUMv3Vespe8VHlN688SJ5kzo3K/LuV6k0XxpNHIlykyqrbl2/3ttcBqGsJ80MNzhGbc6/d3VDpetJJdCaR2T+5urjlU5TqjThyXR9AeF/iHbP8A6m/2t975n+Wr83iaZl2fafN/hRZHrxzwnrWI0R3Un5tzb662z1BGtfkm85f4/L+Xd/u1lzSXLyj+r8seZnylHp/l/vkhZXkf5GkTbTzpryN5yf6xvl+Z/vVu3GmySSSfIr/8C+7Tls9zbNm4/wAXyfdr5n23Kffex5jOh0nyYZER/up937rbv96q8lqk6s7w7PO+9XQx2M1x8kjt83zf7TVn6lp8bODv2n7r7aqnU933jb6vzJWOZmXy2Ih8xFkb52/vNUflzbZZ3eTb/B5j/drV1S1VkH+9uZWb+KsfVriHzOXYP8uxV+Zfm/irrp1uaASwvLH3Sjqzedbkh12r821fvVgXV5tuGfew3JuStPWJHt7UmbdlfvMrferDvJkbHkupXZ89ejhbbHmYqjOQ6Obyo1RvmO/d9+rdnqU0aiH7qx/Mism6uekmfzPOT5G/753VNHceSy7UZf4mZn3V3yieVKPIbkl552f32N1VJdQQL+5fd/D96qclwk0sf77Ztb/dZaZcbFjWOZF+/u3bvvNUSlymFSnPl94Jm+0SNDM+Gk+X/drLvm3fc/h+7uqzdXTxt++Rn3f7FVpI/tHzwwq6t833qqUupyyp+8fVHwsjP/DIoiwcnw7qAweuczV8i2uk3LMYvJVW/jVq+wvhTEP+GWI4SMg6HfDB/wB6avma30MSMr741b+FVav2LxXny5LkGv8AzCx/9JgfUZ9GMsPg7/8APtfkjHstL8uFUdNjM/yVeXw7MW/cv95K6LTdBTy0huU2/wCz/FtrYi8OvGw2bdjfL92vxCWI5TzcPR+GRw66DcrComg3fNuWT+JaktdL3bUQNjdufb95q7O60H7Gphuk3/L8jR1XXRYX+dH+Vk3LurD2nNuerTjHnOcsbOWJTzj+FGX5q3dGt5vMR9/y/L91tu6pl0W2W3WFHY/MrJHt21o2tnbW0KI6MV/j3fw1yVKnNHmPUo7sWBo5FSbzJPKX7jfxVOuoO0mx3xu2t8yVB5cNvM485vKZ/k3feVdtH75Y2R33/Lt/4FXDy/zFSqRWxaa4m+0OjpwyfPtf7zU+OOZgqJ95fmdmb5az/MeGQb5v4Puqn3qspHDdR+dM6ouxd+5/vVlKP2gjU5vdL0MQW4D/AGyOFf4P96tDYjQpsmVXZ9su371ULWES2/necu3d8u3+Grq7Pm2T71X+KplUOqmW4YbZbf7/AJjb937yrNrG0i8Rskit95n3Kq1VjmS4k2TDcy/Kjf3quRqkaeWkytJ/00/2aUZG8eaUvdLljdJcR7441Hltu/efearpZJZPJfazMm/aqfdrNg33S/adysq/Ky1cb5Y/OWFhHt3bf4mrSMfe5jrpy5feLcLTrDL5jrDuXc391qnjuPlE3zMfuOv92qtqXuof3Yj/AHi/8B21ah0/fGPk2s25VZf4q1px933jeXve8ixb71txNM8m7c33f7tXrSP/AEHzHud2377fd3VHptq7W6P8u77rQ/3Wq3Z+bCp86ZdjPuePbW9OjGXunNKpyyEjjMli1y/y7k3bVfc27dWjpq/uVe2m8v5/n8v7v+1UUa2d0G37gF+X5m+9TvtCWrCFHXCy/wBz71KtRl0iYSr05RvKRcjhh+zlPmf5P4fvLUbTJ9ojuURt7fN8rfLu/wBqljuIW/cpy6/wt8tV7qd4JGheT5JPuNv+7XP7CcZKRyyqwlHSRKzQ7vnfeWX5lb5VqndW7yRvM67Y9u6tOOF2h37N+3+L71VZtjWbh9u1V2usj/w1XJOJ5tarCMveMe6VJFUNtV9nzrH91lrOmt/OjR0to98br8395a2prPbtffG25tu2NKZJYw3Ehkhmj37lRo1+8tFpxOfnhIx4YfO8tII5E3fwyPt+b/4mpYbPaz/dDbPvf3mrQuLUR3P2aNPlZNyzSJVyxt3+/c+Sieb88e373+7XQ5Tl9kx9yM+U57+z7mGFLq2uFZ2b513/AHW/2qktdJ89fs03ybl2/u/u/wDAWro4dJR43S2HO9m+b+7VqPR7aSJvs24oqfd/u1lKc+U1p0lze8ZWm2aRw7BCxdvldmX5lrXhtXKjMLbtm2KT5fl/4DVm1tfJjRE+Z2+Vdy/eqxHofl/M6K7xuyvt+bbXNyTqHo03Rp9SKG1f7OIbmZiqy/d31prbXV1tTe0YX5UZl+ZWp9nY7oVSZI1bZuRW+81WJI3s7dEe5jO5t+1Wp08PWlV5eU3li8NTh71SJNHbpDGib1R/K/1i/e/3a1dL+aMQv5iN97d/FWcti90qiZ1QN9yRv71a9tNZ2Vu9zc6rC32e33s3m/e/2a9zD4WvH7J5WIzjLI6Odzf0WJ47pYXuWfcq/u/4m/2q6TR5YdNUWFzNyqfJHI25q4aHUNYVU1W81qPSNPkXck0y/vZP91f4a1rjxNZ6PZy3mm2bRytFte8ZN8s1exDD1Op8rjOIaesaMTrb74meGPBenya9qrzeVH8sqyJtVf8AgTfdr4I/bI/4Lc/EfTJ9T+Fv7L01lptus/lz+JEhWWbb/EsLMvy/71eff8FK/wBtvXrm/f4G/D7UmjVV3a5qEbfNI3/PFf8Adr4cY7ucV0xo31PGljMTU96Uje8dfEfx58UvEcnif4i+MNS1zUZmzLealdNK5/76r9mP+DUX9lHSv+Eo8V/tmeM9Ijf/AIR+L+yfCrSQf8vUy/vZlb/ZXatfjh8Kvhn4w+KXjC08F+CNAutS1K8lVLa2tY/m3N91q/rM/Yd/ZV039jv9i/wP+z9olnHbX2n6JHea3df8/GoTR+ZNu/3W+X/gNfPcT476ng+SHxSPQybCvF4v3tkaHxM0XwxY61f3Oqw7Zr6Xz2jVvmZv7zf7VfF/7WnwNvNea+1XTnZreG93L523dNHJ/E26vpD42ePNY0uaabxPo8MDt/r449zRzL9371fP/jL49eD9BvlufFWpQtDJFvuI5vmZY4/u7a/NKOInTjzH0n1eFSryny3N+yjo+k3g16awk3szS3SyO2xd33W/+xrsvgh4P8L/AAX8J+J/2k/FVms03gu1kbQY7i3XY19IrLB8rf3fvVi/Fz9qiz1jxBc2GlPG9pHFuikjfcyru+WvHv2l/jZrGqfsi6P4TfUZmm1zxfNcXSt/CsMe1Vbb/vfdonPE4lx5/tH2/D+XYenXjJ68p8+X/iLxt+0T8TtQ8R63fyXl3fXUk+pXTLub/d3Vk6tL4i+HMzTaVdTRiNtqyRuysrf3a9f+APhP/hBfhqHa2hl1XXHZ/MjPzLGv8NY/x88e+DPD+lDRIdEs59QmbdKq/M0K/wB5q7faU/bRowjzRPWzXH1YQdRsufs//th6xDqcel6rO1tPDEyvIq/LdRt96Nq4T9orwz4e/wCEmj17w/bRrBev8iwy7lj3fM1ebJ4iln19b22tI4EVv+WdavibxBc6hpscPnZhX5tv92uqODqYXFxnR92L3ifnuZZj9dptVNSdvCaaPDseFWaRN3zfwrVG509PtDWaf3NyL/FRputf2ppZf7eyPap8iyPu8z/ZrS0W8S4tVvHTefutu+8rV6salX7Z81KhHmjymZb+Hb+ZhNbJ8m3+Kr0Xh+8t7hneHKNt37fu112i6lYLZ/6MitLs3N8lbOnww3EcU14io7Ju8uP+GuOeI/eSO7D4PmnEyvCelTWcY86H5JPufJ/DWvdafbQ2LQ7I1Ez7l3L8y/3quqyR3Cw2z8/dfbUt0sN1pvzvt2y/P5b/AMVeTVlPn5lI9/2MKMOZHD3nh/7RdtDDCzQ79u6tTRvB+m6RajUnRWK/djb5mqz5yWszwzJGPM/1XzfeqrqEl5Gqo/yhm2pt/irqlipU4cq6nlVIx57mnb+IPFU0zvDr0lhZrKreTCu1ZG/hrpvDfxu8W+E7Wa2TxLdXDyNu3SS/dZf7tc5oNuJLMQ6lD+4VN7fL92tQfGb9nb4cWKW3juOOV1vVaKFYvMkkj/irz4U/b1eSMOb0Lp1amH9/n5TqtD/bd+LvgGSHxD4S+LVxpWob922xumRmZW+VpP4a++v2Wf8AgtrqnjzwXP8AB79qDw/pfjG3urP59QO2Kc/8B+7X5IfFz4q/sz/EfZP8N3urSWOVv3bW+z5W/wDia4mO48W6Nfx6r4b8QSBoX3RFf4v7tet/ZbhCy9yX94y/tOtKd6nvo/o5+CH7SX7H1rd3Fh4Xs73SLy8dWsbdk/cbdv3dy/LXX6X8WFtfGVppuzzbPUN3lXC/dX5vu1+D37In7S3x1uvE9tpWo69G0Sy738xd3lx/xbVr9Wf2RPiVZ/Eq1h1LxDqqqNNi/wBFbe26SRv9mvBxmAlRxC5pe8foGS4uhXw8n37nvf8AwUq/am8H/sr/ALNU15qWoxnUvFP/ABLtGjkb5JJG/ib/AHa/IO+kvZNSN3JtR5JdzeTuVa92/wCCt/xu8PftOftReH/g7oV3Nc+FPhfpyyX95D/qptUk+Zo1b+Lb92vAWunaRpvut8zJtbdur6vK8L7OlfufLV6kfb27FjdDcMHR2dm/iVvmqjJCvnMkb7Ssu5o2pYZnjVHmdtzfN5f92pZGhuofuKH+638W3/davSjGEp8tzmlLrylu3s7aSNXmRo0b7ix/NW7pdrM15sRG2KnzNJ95V/vVj6bb+XG375flX5fm+9/vV1WlrDeSGEowdYvmZq7af905pk0cdzGB5McjJ915N/zL/dq19heGFkeH543+bzKm02xuY2Te8aKqN8q/8tKvQ2afZWREaUxv93f5lenT+A5nHmMaRYbePyXk3/P8rSVV1Df50r/dk/u7/wCGtKRd0jQvc7mWJldV2/erN1dtxZ5trR7VXdv+7XZGJhL3vdkZV0r+Yru8YRU+dV/har9sFbQ9u8MDCwyv41DfTIyuk275k3LuT7tT2mU0bMhDfu2JweD1NftHgtGP9r47/sGqf+lQPb4bdsVVj/cf5o51pHh2FEY/wtueqU15NIpPzFV/hb7v/AasapeQ2rb9/mIqbvLj+VmrmNUvoY18tEYrHL8rb/mWvyj2fN7x8z7bl2LMl5NJcP5M2xWf5Gar+k3CQt5dzc7mb5pWVq46G8feIZJssqf99VpWOsItwiQzfOzbUrnqU+bU6Y1vc+I9S8P65Bb2aRo7FW+VGri/ip8fLbwjp76am24mX5v3j7dv+1XMfEj4nWfhGzZEuWlm/wCXdYfu18z/ABK+Il/fXTzalcs0zf3nqI0eboeVmWbc0fY0v+3i38VvixqviS+k+06k0jTN95n/AIa4q3vnt7d7l5l/vbawZtS/tC8d55mJ37lVadqF8kdt5PnbP9ndXTGnCJ4NjRk8QP5jvI7bf49r1h6vrmpalcDZNuij+X5ag+0Qyw/OPvfdqGNkiV/n43VX90rmLf2v7PDvdNq/+hU1vEj2e5IX2Ls/3v8AgNZuqatDt++o2/L/ALtYtxfPMu/5mLUc0R8p2un+LppJPJd2Ybf4vvVvWt4mpQ+c7qPk+T5/mavLrW4fer/eH+996uo8J6xukCTPx91d38P+zURl2Mv8R1qQib/SVDNufbtanLb7Vb727/fqa2WRmR/4G/h/u1ZmtfJkEKI395WrQn4feKqxGOPfsZfM/ip11Hube6M3y/eq+LN9q7v9371Maz3SNuhbav8ADVRjGURfaKFtbvIu/YoLfxNViTSnC73RRtfdV/S7EM2/7y7tzLsrqYdDhmtV/wBAVv4vlrOJUpHns2lpJH5czqrfx1y+seG/s8g1DSv3My/3Xr0nxBoqWbPGm1XX+GvPNQ1Z217+x7l9ir83+9Ve8HNzbl7w3qmq31j9g1K2Xdv2vM38VLqWj+T8/wDAv8X96tK3js1jVEdv7u1f/QqmvI0mz/FVRAwrWFN3yJ/d/grsvhx8SL/4Z+IbbWLaeT7HNKsV7bq+3av96uXWzRmKb+aka3eS1NnM6n5P4v8A0Koj70zOpT5oH6R/BXx5pt3pdt4h0rUldGVWiZvvV9q/s1/tBTW7Wlt9v8k2qL8rPt3NX4//ALEfxmSO8f4darqX76P5IPOf93tr7d+H+tar4ZvormO5Yo207V+WtqlP3PcPFlKUavKz7d/bv/aW1K6/Zl1H4VX2qpNbeJbm1ls4ZZgZVkinjmkIHXYNoBPYsPWr/wCyt8Qv2bP2vf2AbX9iP41/GvTfBHiDw/qbT6VeX8ccKNCkxlSVGkKRSMRNLGy71kOC2CMk/I37RPjB/F9l4enaTIhiuFCnquTHx+lWbT4XeFNEsNA1nWvDj3tvqenW9xKPtbplnQE42kY5zX7zgo8P5J4UZficdVrU6k8RKtTnSjCUqdWHNBPlm0nHljqnu32OmlWlSlrrdW+R9M/8E4/En7Pn7GH7bHxC8OeK/wBpDw3qOgW3hee00zxTGzxW18yzQzMikgqZAsbDarsHYBY2kJFfNP7IHxZ+H/wf/bL8N/FL4hTGTw3Z65cjUpo7ZpQLeeKaEyGPG5lAl3FQCxUEAE8V2Xjb4FfBn4i6v4Z+CPwB8LX0XjrUna81SS21E3SW9ljhDG7HEhwSPWvlv9p3xncfsr6V4w8RXfhGLXLjwleT2n9k38skSzzLP9nAcxEOMOwYhSM7cV9TkOfcJcSf2vjYzxE3PDQjXco04NxpwnFypqDaU5JydnaKdraaH6FwbKawGPStpSk1v1TP0sP/AAT+/wCCYDeKz8dD+2hpn/CBlv7S/wCETGr23neX9/7Pv3+fsz8vleV5235d2/5q+Uv27Pip+zv8V/jrdar+zH8KdP8ADHhmxt1s4ZtPgNumqsnH2r7PhVgBGAFChmA3v8zED4y/4Jk/Fb4rfthfHeXw78Tb6yt9OnCGLS9NsfKhtw0m3Adi0rn33EV9Q/8ABe34Dav/AME2rT4Oa38G9WkisPGUl9b+IZriATg3KJG8SqZc7BhmyByfWvn+HPEfhrK8zWNx2NxuLlCLhTU404xjF2vzRhNKpN2V5zu+tr2a+HrU5uPLGKXocJXS/B34peIvgl8U9A+LfhKOB9R8PapFe2sV1HuikKNko467WGVOCCAeCDg180/swfG34gfE3xnf6P4s1iO5todLM8QS0jjw/mIucqAejGuM/aM8X6hpHx11KyivZo0W3tyCkpAXMKdq/Tc+8TspjwQs6o4WVajWm6LhNqDaalzXtzq3u2t1uYU6DVblk7dbn7o/GT4Z/wDBPX/gpjrFj8e9H/ai0/4feKZtLt4/Eul6nJBGzMqDAdLhot8iAiMyxsyMsa8cZrhf2t/2jf2YP2av2Pf+GF/2O/GVv4pl1m8kPjDxEB5w27kd281VEUkkhWONTHuVI4iCd21q/GDR/iPFIsem6lqbfaEVmtpFuDtZW/hraudZu1Qf6Y3ypudvOLV/NeXcd4TC18NSxEK9bB4WSnRoTrQ5Yyj8HNJUVKcYX9yLdlZbrR+39UjUg5wkrvd2/wCCfql+wT8Iv+CbHjv4D+LNc/ax+I66f4ptpJRBBd6y9k9lbCPMc1lGjYvJS2/KFZcFFHlgHL43/BM34FfslfFL40alr37Q/wAWtJtNL8NyrcaL4a8QSpZprQ3nbJM8jeWUTCloAxLlufkVg/5YalrlzJMkw1SZNq7t28/NWZN4yvd2Ib+Xhv3v7w19DjPFvFYqlmUacsRB4vl5f30WqCWjVJOl7qkrp2aezT5lzHLHBJOOzt5b+up/RN+2p8B/g1+2j4gsv+Ei/wCCjPhHQvDWkKP7H8K6fPYtBBJt2tM7G8HmykEqGIARflUDLlvij9sP9j34Nfso6NoXjP4TftfeG/HeoT6lhtHtIYnmiCYYTfuZZkKAjBEmzORjf8wH5VjxVOsph/tKf94u1GaQ7qjk8XX3nB0mcpGv8U5WvH4U8S8z4UjQw9OrOeFp3XsbUIxknfeSo82rd278ze71uXVwsat21q+uv+Z++3xM139g/wD4Kt+DvC/ibxj+0Fb/AA6+IWjaSIL+DU2jhUZO6SLE5RJ0Dh2jaOQMBJ8wydoT4GfDD/gnd/wTR8ST/HbxP+1jaeOfEcWnzw6JYaKYZnQOmG2Q27yYkYAoJJJEjAcg4zuH4Dt4y1OTaft86p/10NMj8ZahAoT+0n3q33fONea+NIQwEsoo1MRDLpXvQVWnpGTbcFVdDnUHdq2umjbvc0+ry5udpc3ez/K59lftg/GDVfil408RfGHU4orS68R+JJr14o0AWLzWdwnAGcDAz1OMnJJNeOaP428m6aZ7ltkjK3l7/lavIf8AhNpp0a4lvJWU8CJmJq7b+KrmaRUhuYwiv83y/N92vM4z4rw/FObRxVDD+whGnCnGHNzWUFZa2j08jTD4adKFm79T3PQ/GVhMyfJviZvvM3+rru/D/jVLiP8A0N2RWdVddv3v92vnjw/rXl7Hn8t2ZNyMv/xNeheHfFDxtHvmZF++kav91q+MliObWJ1xozPcbPxBeTSRJDNt+b5IZPvbf4mrN8bakdRmhbaQELjJXGenNcjo/iK5m/ffaVkf73zfLtrUbWX1mNJpQu9V+Yocg1+m+D9fm8QcJHyqf+mpn03ClGSzulN/3v8A0lnfeGtce20W3is2yUhTevvirMniaGPdsfj7rtv+bdXBDxUlpAtkjRq3l7dze1R/8Jh5yNDDYbTs+Zq+H4hr2z3FL/p5U/8ASmeVi8PJ4+o/7z/M7ybxVNDMiPc53Ju3f3qrzeKZpVDo6lPmXd/tVwlv4kmk8ua5jWI7tztH83y1Y/tiYM3kzMg37tu35a8GWK98f1Xm942tU1aPbMjwsf4tq/3v9msHUrh5GmdnkXyV3eWvzNUVzq9zNtmO0hvnRv4VrK1K8eRi/wBsYfN80K/wr/eqPrEpbFyw8YwJLq6hWSF0/ii/1jN935qyZPEG5nTf937zN/FS6ldeZG+/ciM3yfxfLtrBvj5itNs8zavzbm2s1bU6hy1MPH4jqI/ElnHsmmf5tmzzP937tQyeKkvpmRJlO5G+ZWrhm15FkT5Nqxy7tqt/s/3qrf8ACSOq703A/wATb61OfkOqvvEUMkawwvvb7vy/3ax7vWIR/oyIvl+V/e+7XPya/wCZC01nNv8A4Xb+Jqz5taRrdnRJP91komTGJr3GuQ/OPmX97u27v/QaWx1TbmMOzJJ92SuRvNSe5U+duVvvf7VX9Pu55o47n/VL91FZvmb/AGq5K0eY7KZ6b4d1BFaNHdVPy7K6+2u4b6XzvtMjL91FjfbXmGi6g62p/ffe2/6z7tdRpd8YlEOxkVVX95/C1YRlGPu8x0xo9kc82jzRsU2KfL/i3fe/4F/FQ0aW9w0EcKu+z523fdraktXEYSZ/uvt8v+KkuLe5aN0hKl1+Wvj/AGnN8R+g06PMc4y+TJstk3bvv7n+Zao3kflu8yfIrP8AdX+Jq2b61SNm2MzFlXbWHeXH3pZnYsr7kjWtY1OaHunpU8L7vKc/fSJMzpMm6sLUlhWT99J5YrZ1SORWKJcspb5vmrG1RXkczfMrr8yL/C1dtGXuHV/Z/u6RMe+bciTI+9/4pG+7WBqK2f8AqfM2M38VbF19pmm2P0Z/urWXqDeWvkvtZt/8P8VepRxHwnnYrK5cvMZDb5PMeRGXa33qGnebefs2xFRf+BNSszqyuj7/ALzbW/u0lrGkmx0K7WTc3zf3q9CNaLifK4rAzpyL8MKSQ/P8zf7PzUyT5t8Lp/urUunw/Z22JMrp/H/tVaksfvSQo21f9n7tY1Kh53sZy0ZkzW+1Vfzud/3V/iq5ounPtbZ8v+zsq3b6TGsiTI//AALZWppun21yrIjsZV+Z/k21Eqn9446lM+hvh1AIv2dEtwwYf2PdjPrzLXhFhoqNJstrZU/vNs+9X0B8P4PL+BUcEgz/AMSy6BGfUyV5PpemvMqoibPnbav91a/afFpxeS8Pr/qFj/6TA+gz9L2WDT/kX5IzbPQ7Zdzo/wDBtWT+7V9bJ5LhIZtwRtu+Ra3rXQ7ZWTzrZcSfLt/vNVmbTRHtSGwXydn3a/DKlSHwnl0JSiYUmnfuVhT98y7tit/FWfcaTItwXtrZRGr/AL3d/wCy11raXcyRlIbNR8n3o/vMtQyaG6Wav9jV1VfkjWX5lrmqS9melTlzbnLzaebiQI9tJhn+6v3l2/xVWazmVfJRPl/jZk3NXYRaS7Wzp9mkRFXf9z+Gq13p0f2V4fm2fe2su35awlKXwnTT/mOSuLVJo/OTbuZ/vVUkZ5I0m+7u++v3dtdDcWKSQu/2b5P4W/irEuNPm/uRtKybvLV/vfNWfN7vKa/3iOHYshSeba7Ju3feZamtW85lhfbtZdyN93c1H2PdCg+x7JF/iX/aqeO18nYHffK33KXuRIjKRYs4bmSSJCVVdm75f4a0I4Z41W2dF2L8zMqfxU2zsXZ0f5fm/vfLWxHp7tHsSFt2/wCRt/3V/vVySqHoU7/EVFsUmj37Knj8u4ZLN3jC7vnkb+GlaDeG2fK/3dy/db/eq1a2SbkuYUYRs33ZF+9Vx5ZqJ0U5E1hH+7aaFFJ+75bfKu2tOzX7G7XNnDu+8v7tN21v7tLpVrDIoeFmVW/hkStmysYVkSZI1T5/nb+7RzTOqNT2exlWMf775LZVK/Nu3bq0mt3XaIXZzIn+sVflVv4lqSa0RdSdERvl2v8Au0/hrJ+NnjhPhv8AD+bUvDztNqcz7YFVf3Vuv8TN/tV6uFw9XETjY480zShluG55y97+U7nQfBNzeRp9vvLexST5lkupdjbdv92tBfhg9xZyw6J4z0u7uY03W9vJLtX/AGa+I4fjd4z1LXpb+8166eS42rceZLubav8ADXR6D8cvFVrfJdWesSJJG+7asv8Adr6GngadP7J+aY/iXMMVV5oS5Yns/wAZvFXxa+GsLWeveDNPjtvveZprM25v95v4q8ruvipf3FoupWviFV8tvn2y/d/2a7W4+MUfxK8A33hvxg+97ja1u0b7pFb/AOyr5S8eXeq+B/FDJbXLRpH5iy2q/dZa640YdIniyxeKqSvOpI9b1D9orxbpuobLbxPJ/wB9feqCH9p7xOzDztY/d79yxt96vK9S1Dw9Haw39s/mpNEsqNJ95W/iWsG68WWbzOn2aPbv27t1V7Kl/KNYnFR+1I+iof2ltYhjDpqv3l2vGz/+PVNa/tMX9wwRL/5lf5l3fe/2a+arXxPpskmx93+z8/3asf8ACQabEu/7TJu30vq2Hlq4h9axUvtH0lqX7QmvSRj7Hfxodu3av8X+01SQ/tD+IXhihS9YfL8zbvm3f3q+arjxVD5izf2kzfLjb/dotfHDruS5vI3Tf8tP2FLpEXt8RGPxn0+37QmqzSbJtYkYLB8it821qsn4/X80gd7yOXd8ybv/AGavmqHxk7fxqf8AgVI3jK/U7PtHy1H1WG6iH1nEfzyPpmz/AGhpoXZLnVN3mf8ALOP7rVctfj99oZEsPFDRMqbfvbvmr5Sm8ZXjP532ln/h/wB2o/8AhMoYVZPtKr8/3VSl9XpS15R+3xS+3I+rtQ+N3iTa6W3iRZpZE2/M23d/tVGvxq1vT187UtSmilk++0d1/D/s18pv8RNrfPeNtX5fl+XbVab4tTKvkpebgyf3qtUIR15SY1cRH7R9oaP8evD1wrQzeNmtvkVUa6f5lb+7ur1jwjcaJr1rDf6br1rf7l2tJDP5n+7X5fX3j77Wqv5zBlf+Jv4q6b4W/FLx/pOqInhrxDdW0i/xQysqr/tba05XHYxkpVNZSP051jXtE0m3ijS//eqm1Lfd95v7q1V8TfGbwB8EbGPWNVe31PXJomS301k3RQ/3d3+1Xx3b/tCeJ7jybzUtea5uLODZA395v4mqlJ42vPGniJZtQvGY/ebc+6oi5SkZ+z5Y/EfXXwz8feKvi14i/tjxa63Vs0TbLNfljj/iXbWf+2F+0xbfDL4W3k2ia232prPy7VVT5d33fvf7NcZ4D8XQ6V4QS8sL+SP5V/2fmr5T/bg+Ll/428WLojvGsNquzyY//Qq1lHl+EVJ+0lzHguqXOq+J76bXtVvJJrm6laW4mk+ZmZq9S/ZB/Yq+Nv7ZHxd0/wCD3wd8H3eq6nfXEaZt7fclvGzfNJJ/dVa534c+CdX8eeItN8H+FdEa/u76eO3gt1T/AFzM33a/pO/ZO/ZQ+G//AAQd/wCCTPjX9rvxpplo3xHHg2S7uLxk+ZLiZdttap/tbmXd9K3hDlpc89iqtZyqqjDf8j54/wCCbf8AwTN+BvhT9rh/2UPhnNHqUXwtij1P4zeMm2+ZqWqfK0Onwt/DGrfe2/3a/U7xZDpt19pRJlhMP3WVv4q+Ff8Ag2n0maH9kLX/AI3ePXkbxN8R9fuNZ1a/umy0ytM235v7tfYHxO8QWdu815C63EMiN5U0fzL/ALVfknFGN+s4ySX2T9I4fwTw1G8ux578ZLPTP7FZ9YSzumZW3rJ/6FXwT+1B8H7XUtQbxP4eSQfat0UtrGyskK/7K17f8ZPjTqV5qV5o9hfxtF5+12b7yqv3dteLeKfiBpusWo0q/v44Nrt5Um7azNXzeFnKW7PbjhY+05nufHvib4Q69ot1ea3rtzdIiy7ovLTb93+GoPFljN4w/Zz0nTbzzm/s3xyqpcXEW39zJH833a9d+LvjLTbHS/s15qv9pSSbldVT/UyL/Ey/+zV5pZ+NpNe+Gut2d/YRomn3tvexLG3935fu16FSpXnS54n0OUVI0cQozOo+D7aJqnxE1jw89ntfT/D0n9msvzKsnl/K1fFfje6vL24lvNRud9y0snmzM/3vm+7X2V8H9Pv5Ne8QeOfDd+zyafo0k6Qq67pNy/d2/wAVfCvjPxJNLfTJsVEaWRvL/iVt3zLV5LTnWrzkYcQSjGhYbY6hpGlTx2Fr+9nupdnmN/DWj4ksZtEtfLfcV/iz/e/u1jeA7LTr7xpYvqR3RM//AAHcv3a6j4rSJb24eFF2ebt3V9HiFy4iFPufn81zRk2ZGh77y1d0RY1/hVq0dIW8sYftTpJ5bfw7qq+DYXa1R/l2yP8AxV0t1ZpJDv8AOVAv3F20qnNzSMpa0lpqVtO8SPYzM/8AC3y/f+atqx8XXMezZMzLt27pP4Vrk9Qh8y4Kb2VW2tuWtvTYd3zx7v7y/wCzXnVox+I3wdWcauj0O+8M332pD5O7bN8/zV0UPh68uYd/ksu35lhj+X/vquS8F/K299rMrqybq99+G+l2HiK4jmgddquuyFf/AGavDxlT2crn0cf31I8x8M/C258UeIBZwurI25l/3v8AZq74q+EV54f8RW+g3Ls0cf72eT721f8AZ217+3gnSvAjDxK/lwvbuzRQxp/epfh7oOieLPiM0z3MKXKy7UvLr7qx/wB6vOjinKfN9k4Hg579T578O/B/Uvjd8UofhLYaxNoNrfQL5F5fN5G5m+6zf7NenfH7/gkh/wAM0fDePxr4q1WSHX47rbYatap9ps/LaP8A1m5t275m+7X2Vb/sT2fxeWHxDoT2o1a3i3Ws1w26JmX7vzfw17BP+xL8ffEnhGPwf8Q9YZrCGLcvl6izJG235Vhr6LL81lh+WNOPzOatl9HFx5amkj+cvUPBlz4R1680SS0keazlZJ2kgZP3n97a396uh0e6mjsR9pdvlXb/ALtfqt+1x/wTV8MeF57GFP7Q17W9e16zs1uL7a0vnNJ833f4VjrhP+CiH/BNn4afBfS9Qs/ha8b3Om2dusW3a7yMy7pK9avmmGxH8RnJ/ZWJoT9nA+Kfgi/xEXWJLz4faVNeSSRNE/lp83lt/DX2Z+z78UPjf8F/B8viq70G4tbqa1aDTbeSXb+8Zdu5t392pv8Agi54H8BxeNpbD4i6V9pSS88ho5Pl+zsy/eavr7/gsD+z7Y/Db4b+C/iR8N9P3aJbzSWGttb/AHbdpPmjmk/2W+7XkxhDF47kPoKdGvl+GjPm+I+BraH7Cs32+8865uJZJ724Z9zSTM25mak+0JcMyIm5fuqzJ95v71SfJDv2Ooimf/WKv3v9qq6x7ZDH8zlk/wCWdfWunGEOU86MrT5hqSTNt+8zqu1l2Vcs/tPltDbWbOkf8KpSraQyKltO+5vK2/d+bdVu3s59pG9drfK8jN97/drkj70fM3lzEmi/vpFme5jVW+Z12/Mv+zXYaWvzwiYqdzszbWrntA0fyZmkeGF03N8yv97/AHq6zT7cf8uyLv2bZfL/APZa9DDx9nozz63vF/TYUmupU+XYyfe/iq+s3k27w/MHX5VVUVd397dTLNfJtfORI9rNtXbUL33l25e5hkcM+3y12/u69WjzchleMd5FDVtkyp5IaNlbc/y/eWsa6vJmke2mCpu2tE0O1l/4FWzqypMreTN5X+1t+9WDeW+2GW5877r/ADfJ96u+jGMfiMZe7rEoveeZJLDDNGG+7t21ctm/4p5mVM/uXwBznrWf/qo/JeFisnzeY33Wq9ayGTw28jMpzDJyBx/FX7b4ORis0x1v+gaf/pUD1+G1fE1pf9O5fmjhbyaaONvJtt259rNv+Za5rWrhG3u+51X/AGtu5q2dW1Sb7OZn3YVWV1VfmriLy8Ox5kTG5/vf3q/JpR5o+6fEynzSuMuLy5VUh+07Ubcz/wCz/s1qaPdQWqm/v/uRruaRf/Qa5+FYrp2S2hYBk3eZ/tbq5n4pfEKwtV/sTSpvlt3b7RJv+Vm/vVzVv5Tlq4j3TM+LHjqxvry51KGbY0nzbV+ZV/3a8E8ZeKPt146b62PHni8XE2xHz8m2uCuJJry92Iitub71L+7E8/l5S1Hqrxrv85lVf7tTQ+dI38WGXd/eq54f8J3l2vyQ71kfbXTN4Lm0+NPOh27dvy1pyi5oHJxw/d3vn5PkqrfTOsjb9qL935v4q39aW2tWaBPv/e27Pu1g6kqTf6xFbb97dUSLj8Rj3W+Rj2DfxVWVX+5sXNX2h3ebsG3dVbycKnybd33m3Uv8JfwkfnZ+T5v73y1e0W4eOb5G+VfmqrN8sfH+7SW7OPnQZ2/+hU/hJPVvBN5Nq0aQvhnb5fmfbXc6b4PS8jZDy/8Atfw15J4K1j7HdRTO/K7a9r8KaklxarNC+5ZF27l+bbTjIzqR5omRfaK9kyWr7X+f+H+GlttHudweZP3Xzbd1bEi+ddNvhZVjlbc2z7zVNHa2zMuxGXb/AOPU/h1MYy5TM0y38q6/1O8b/u10tir+SqJtSL+8tZ62W1lTZlVb+H+KryyfY7dt/wDu0lHlKl73vI4/xpeJpt8+xPlkl3MzV5r8SNBm+yxa3psnzruZ9td38WI3t7WGZLlnG/e1ctperJq1vJYb1YN/DIn3Vo5eWRpGUpQKHgfxMmsWPkvdf6TGn3WrpljeRXT73ybmVa8l1YXngfxY4hRkG/dt/wBmvUvCepQ65ZpqSP8Ad+8u2l/dCS+0LJDunUp8m1PvNUGUWQf+g1rXlvFtZERvv1nzxxhVR5vn/vVUZAVLXVrnwP4s07xVpk3leTcKzzV+lP7NPxQ034reC7LUkeOWWSBWlbzV+8v8NfnNcaXZatYvprso/dNt/i3NXtH/AATm+Klz4N+JUXwu8SXn2e2vLjZbs3/PRvu/99V10Ze4eVjMPzfCfc3xCiuYTaLcLgfvNv0+Xivqb4a+E/CnjP4T+DBq17b/ALvT7ZJSgzIo2DK/+O185fGvTZtLtNFtZmPEU21T/DyldR428Q+Ovg1+xB40+O+mWtzMuheBpZLHarbftEsYii+7/d3bq/Y+KaV/CDJor/n5U/8ASqhyU3dRU+p+YPxm/be+JGrftsePPjT8H/idrXheVvEE1jolxod60EkNnD+5j+b/AIDu/wCBV9B/GjU9Q8X/ALLV3rninVLjUbvUdEs7m/vbt90tzM7RO8jk/edmJY56k1+atlPc2zrctc5f78sjfeZm+Zq/RjxzOD+xdazuw+bwrphJ+ogrz/DGLjleeP8A6hpf+kzP1ThOKWBx6X/Pp/lI4X/gn58Sv+FK/tDeHtY0FIYUmvVS6aT723+H/wAer9Zf+Dpq30f4w/8ABIf4fftCaa8bzaD400u4imX+Hzo2jkX/AL6Va/EPwrqD2OsWmo21yqSW8qusjfeXbX66fF74n2P7U/8Awbl/Ev4Xatfx6hrfhHS49VttvzN+5mWTd/3zur8hjKUKyZ8NGUbuB+bf/BP/AFKLVfFV/dRyK3/EjIYr6+bHWH+1vcT2vx71N4UZ98NqNo/64JWV/wAEt9Z+3fEHWrDDDy/DofaenM0deqfFv9nr4hfGr49X9l8PvD8+p3c8UCJbWkO+QkQLX7JmNWNPwKwspv8A5in+VQz5JPFuK7HhskyXVn51q0e9f9v7tdT4B8aJrVr/AGTc3K+bC3yN/FJ/s1yd54d1Xwrq1zoPiGwuLS5t5ZIpYbqJkkWRfvblrmhrT+GfFiebuWOR12t/tV+KLklHmiduHqTjPl+yex6t5M0azJHu+dvl3fdrnr5XaTzt8brv3bf4q39FjTXNJTVbYfMyMzeXt+Vqo3Gjw+csMMjMnzNK2z+L+9RKpy+6eh7GMveMUzSGZnh8wL/B5jbqg8yaP9yPmDPudmatB9DEe6ZNzqvzI1V7rSfLV5nfyX2fP/tVlKQ40e5Sa4dZPn3EL/FuqC4unuN+xFG3/wAdq42nu670Rm+fb81Rw6JMtwdiNsb5t22sJc8Y8xtGnzSI7e6u2h2TJ8v8LLW9psyLHDC6M3z/ADsv3qp2dg/mO+zYip/301aFna3K3Cwof9p1b+7XJUlPlOynTgdNp948q7E3Af3f4ttdRpWsfu4Xhdk2/wCtX+KuN0uCb7OuyP5m/wBvbtrqND/fL9phRmj/AL2za3y1w1K3sdT0aeFjI7rSte3XG4zSb/u7mT5q7fwncNLHNF5bqse0IW79eleX2104khm875Y1216D8NRi0utsxkUurBj3zmv0vwTxMp+JuCj3VX/01M+kyLB+yx8J+v5MkvtQl+3TIoUmOVgHY528+lI+pJbgzWc0kn8P935qo38yw63dCZt26ZsH+5zUunxpM0UzvudUZm3L8tfAcTY3l4jxi/6e1P8A0tnHXy+U605eb/M0o5kZUmRGaRfmdVl20lvdO0zzW3mBPuyt/ep1rZw7Umh5LLtbd95alk0+aTDoWDx/wr/Ev+1Xz8sd7w1l/uDftW7YjvtWRtv+zRMr3S7Lm42tGjbl+7tX+9SzWs5uJbZNqJt3f7P/AO1Uc0LrMnkp/wAsmXdIvzf7tb0a0qn2jKph4xhsU763mMf2l32/PudV+bctc7qVs7QvNNDHmRGVFVK6uazeGFzC+Cr7mVf4WrOutNhuITM6N9/97/D8tejhqnLH3pHlVqPNocJqG+PaiW0ats+7Iny1j6gHtbrzhuQMyt8v8P8Au12WqaHbXcjonmbd275vu1QfRUhdN8O5W+/t+Za9WNSPxHnVMP8AzHI3SpJarNCn3Z9qSK23dVSaL98zpuy332V66m68NQxxsZvkfd8u7+JqoXli+nr50M251VU3Mm7d/tVpzcxj9Xlz+6YMNgkKqiJv8z5fmrSsVSJQjwqrr8m7d92ntp7+c7787n27dtT2NjlVtkT5PvIzJurmrbHRTo8s+Uu2t0V2o8O7b9+Nt27durqNHvIVj2b8tuX95I9ctawvGpTzsP8ALu3P93/gVbGnXD/JbO+9lT90zfd/2a82R6Macoq7OtuIdri58ld6vuTctUru5/eK77d/8S7K6G8091jLzRq7fw7U+6tZGpadCsf2yZ1RNv3tn8VfH/aP0ijTk4+6c1cfvrdXd4yV/ib5VrntW/eStMj4VX3Sr5XzN/utXVa1HZq2yGHIb5tsn8VYmqR3M0e90bcqblhVvlrop+6ezhcLzHH31+FGxJsvH8yKsVY99vZm2bVZv9uug1az/dukO5NyfO277tZeoRwyKyXKRllVVaRfvVtTqez90+gw+X83xHLalazNMro6s8f3FrL1KB9whmdUZl+7/FXTaitnCv2nzW2b9yRqm5VrBvo4M+T5LM7N/rNn3a7qNbmFistjymLNYusZTequr7U3VFDbzSN9mdNzK6/Nsq/IEhGzf8sfzf3m3U+1sRGp2Rtlf4m/ir1qdblh7x8Jm2X8vMP0+z3W6/J82/8A1e+ta30e4uIx5I3bfl8uT+Ko9Pt0WOLzk3P97+9W5br5sib9oLIy/L/d/vUe0lzaHxmIo+zgVbPS2k2OkO1I3Zdv8S1sabZz+RJtdR86/Lsqxb27sphf5ol+bzF/iWtPTV87CQuzwqu528rbWP8AekeTW5ep694Mgf8A4U/HbuQSdOnBOMZyXrz7T9LeaH5IZEfZtbd/C1eleE0UfDKJFjZ/9BlBR8ZJ+bI9PauX8O2MKyKRCy7t27cn3a/bPFybjknD0l/0Cx/9JpnvZ5BToYS//PtfkirDp5kkjTyVLL95vu1oNapFA2+zVPn3bt33v9la0rezS3V0SCORpPli8x6kms0Zvn2u6s235flWvweVT3uY8ijTjHVHONpsykbNqyf8tW3fMv8Ad+Wl+y/uzYTRq8m3d8v8K/xVtTaTczKsyJuPlf39rfepI9JdZseRsVXVmb7yqv8AtVEpe0jaR00exgfY/s7Jcw9NnzKtV9Ss/M3uLOP/AGNr/eX+9XQx2qMzukyrGzt8q/Nu/wBqqtxYwuomhfak3y7m+Xc3/stc0pe+ejT5pR90468015WkvJnyGbb833fl/wBms6ax+Zfs20ov+xXZ3Wiv9oVEEe7+JWf5Vqh/ZdmsLQ+TudpWVZNvzUv3fNzdDSUaso2OXWx875HhZAv3dvzbqS10v7++3Ziv8Lfe210DaXCyyvC7Jt+82371Q29nN5w8nbj/AGl+9/s1MpQ5gjGRDaWszXHku7bV2vtb5q0V3zSBETc3zfd/9BpYbea1+dLb7z7n/wBpaufZU3JM7bwr/e/+KrA7YxlErQ2EFq2x08pvm3/xfdqzZW/+ledDD91Nyf7W6opLV47hrn7Mz7mZUVW3bq1dFh+0tHvTeFRldt/zf5WnTlKMd/dNvinymtoujJIqWyOyrt3Vu2fh+SaNzJ9xU/i/ipvh+zhiX9991vuMz/w/w1oeKlOm6HPcwuzn+COP+9VYeM62IjBG1bEUsJQlVnLSJ518SvjNpXhHVn8N2d5HNqUjqyQ+V81uv91v9qnfE7VPDfiDw7b6CmlRxG8t/n+0L86/L95a+Z/i43ir4f8AxQPjHxJDIrXFxulVnb5m/wD2a9T+I3xFsL7Q9A8bW95DNb3EH3VRtsP8O2vvMJhY4SlZbn5BnGYVc1xUqjl7v2TwLxl4fn8O+IrizR2T978rf7NOs7g/Z1dPvr8qSf3q6341WtlfeV4n0p1KXEW75U3LG392uHtLh7hVfCl1/hX5a7tfiPJ5vcOp8L69MsywpNtO/duZ/u1x/wC0NDDNcR31s7Zk+8u+tCG8TT2aZEZTt/v/AHa574iXCapZ72ueFTb8zfNUy94qPvHDWOqXMKrZ3T70/g3VVvFRpN8Lsqt81LM/2WYOiZFRXVwksexIP4/vNT5eXQ2jLmI2uHh3bJttEupTLGu/cw2/w/xVWkVGTeqN96opG3L9xcr/AHqfwxD3i39oeNl37iqr/FRHqm5hvHy/eSqDXW1Sj9f7y1E0zMqyZ+bfupFcvKbS+IEDf6za6p92optcdlKQ3TL/AHKyfOf77yc/3v71EbIdrvubbVfZFymnHql2u5xM3zff+annWpljH77ft/iasuWZ9xpPtLrDj5TUi5ZGlJrlzdSEu+Vb+Gq11cI2E8mMVSeR3QPv203zMqv7tjtoHylppLfcifdrsdJvP+EV8NrPDNvuNQVkVv8AnnH/ABNXF6db+beJvDH+9urQvtSfVLpcriKNdkS7/wCGqk/dsxcvvnYaLrczKru+Qv3a9X+Ecf8AamoDzl3K33f9qvEPDsEN1Mi78D/Zr3H4c7NP09fJ+Uqnzs38NO0Ix5jGZ6n4s8ZW1n4fa2dGEdvBtiVfl+b/AOJr468dalc+IvHVxeB9/mS/dWvc/jN4wh0vwu8MN5IrSIy7f9mvDfAtrNqXiVpkhaV22/LULmlVHHlpw5mfrR/wa4/sAab8ff2lj8fvHug/atE8ExR3UUMnzR/bm/1P/fO3dX27/wAHjfxsvPAX/BPTwj8F9NuWjbx94+hhulSTb/o9rG021h/d3bfyr6S/4N/v2U4P2af2CPDd9qGlfZtV8VRLqeoGRfnZWH7vNfnj/wAHqOvvL41/Z/8ABkwZ7fytWvWj7Ft0a104ufKuRfZRllsZVE6j+0zoP+CLH7V9h4L/AGOPDvhjW4ZGjtYFgW3hXa0aqzbfm/iavpPx98dtB8ReHX1LQvEkM5+ZZbW3/dtH/sstfK//AASH+B/h7xB+zDpWg627Mtx5c8U0kH+pZm+b5q+ivjJ/wTu17wr4dvPGHw98etDN/wAfHk3zr5TL/wBdK/DswjTqY2c0ftdCXs8LC/8AKfPXxX+LGlahJND9jVJpnZrrzIvu7f7rV86ePvEtzHcPDo+ox3CQ7mlWOX5lWtL4qXXxR8M+K7zRNe8N3yhk/wBdCm6KRW/iWT7rV5neaD4k1icvdO0PnL95bVmb/gVGHwvu8xt7aMYf3jhviB8SJrqV4ft8flRtuTb97/dZqreBZLzWL93ke4W2uott1Gq7v3f+0teir+zdDqEi6lePHcJMnyq0DR7qztQ8F694Llms9NRltlTcjW6s33f71d3JGnEUJ1/iPObi8+IXgvXGv/DGsTQNbv8A6P5cu3ctcjqHgPwl8Qrj+yvElnDp2rzSs32yP5Vbd93cteueJG/4SzT99gjS6pGm+Bl+Xdt/hZa868YabYXnh5PE9heKt1DKyXVu3ytG3+7WeHqToTfJodWM5sTDX3jyfxF8GvGvhPxh/wAI24USQurRXG/5GVvutR8UJodNs4NKluYXuVddzQvu3Vc8ZeKtY1KEveX8kjxp8rM/8NcNobTeItYWa5mVoo3z+8WvocP7TFctWp9k+HxnLh5+yX2j0Lwvapa+H4Jk/hZmdW+81ak+tOsa22yFl2fut33qzo9ht9j7m3Jt2/w1LHpqeWn7lt0a/JXLWlGM+Y55PlVkT/2X9sjW5Tlv4lVfu1p2Nr5OD83+zu/vVn2P2mz3/IyozLtbf95q2IZEXY77fNb73mferhxNT3TpwcoxLul6lZ6fMuyP55H+bc/3a9t+A/jKG3mjT7Yrt5u542+XdXzrc6k7TCaSHcV/iX+7Wr4T8bPo99Fc7Nrxv8vmP8teRiMLUq0nKJ6+DxlKnP3j9AY7qw8a6b5M0MKrJF/rP7v92nfD34Q/2bqU32O5kuV3K0u77v8AwGvnD4V/tD3LQ29tc3m5lf5o/wCFq+mfgj8XtKVYftLySbhul3N8y7v9mvGlGUY8s/difU0KWHxK5j7F/ZH8NeM2e2sbGzjkMjbrVW3fKtfU8a/Gq50qDTZobGFNjI7R/Nt/u181fs5ftEeD9PW2ub+2ZAqbEa1+Wvq3wP8AFbSvGMca2w+zxhP9ZN827/ZqsP7Bx5eY58Zg6+H/AHihzROS1f4ReG/C/iPTfHnjN49Qk0WKSfTbOQLt+0MvzSf71fm7+0dq3iT9or42eILOG2/126CLTV+Vodv8Py/xfxV+jf7UnxO0fwP4Uub/AMlbqaGLzWWT7u3/AHq/KHxJ+0Po/hv4ral8XdHmtYvLlkllj837237vzf3lrsdOnbkj6m2X04Rh7aqvekdT8Efhanwr+H+qa8eNS0m/VpY9qrL8v8TL/s19ueFvG/w//bK/ZS8Tfs7Xs32qTWPDUkVncRxeYy3SrujZf91lr8yrf9oi/wDjJ4w8R+J9BuVh/tD97f2cKMqtN93d/u7a+tP+CZfxNm+GvxGikuVX+z3u7eFEj+bzGb+7/wB9V6NGNSlWjUUh1qcMVhKkHH/D6nwfY6Tq1nCfDetwzNqOn3ElrdRrFtZZIWZW/wCBfLUyxmRvOSZn/hddm3bX0h/wVZ+Blv8ABP8Abv8AF2l6SPK0bxZaw+INMWP5dxuPlm2t/D81fP8Ap2jpDH5DooRW2o2/7y19soc3xSPhKdaPLdRGWtinzeQ+3b827+L/AL6rSs9NT7ON/wC+f5tjbfmX/ZWnww2zfuYdzo3zLtRv4aljaaS3aF4dnmfL838VKNLm1ibyrRjuXtH8nyZnttsrR7V+Z/u/3q6Gzb93++3J/D+7+b+KsnTLXz40RHZXaVWfbW9bwwrb7/mYLu27vl/3t1enh6cYw944ZSlUkWVW1aHZ9m8vy/ux/dqtJHbKhmRN211by2+81TQ28N5IXm3MFfb5e7crLt+Vt1MuLdIIfv7PM/ib5mrtpxCPNUKGsWsMMrO8youxvmb5vLWsK8WBd0abcrEu7d/Ev8NbeqMzWM1s+5PMX7yurLt/3a526uHmmWFJt/8AFEzL/DXdT+P3ialORQvry2ZjDDu3yJ86t91Wq7bE/wDCMOVBH7iTHGT/ABdqzb7yZlWZEZNsv73cn3v92tCFw/hSVoyQPs0uC45H3utftHg875rjv+waf/pUD2OG4P61Wb/59y/NHlniiSaG1lmg/eu3/wAVXK2qpfXDQQv5vztuWP5trV0Ovb7yXf8AKVb+H+9tqtY29tYxy3l/M0McKs3zfKq/7VfkcvhtE+IrRlHUzvEnh+5sfD83lbVmuIv4U+ZV/iavnz4mWttoqun2lSv97fuauo+LXx8upbyb7Nqv3V8pNv3fLrw7xd4xm166+0u/zf7L1z80uY8r+JqY2r3T3Fxvi2vu+/trofhz8P7/AMTX0KIjE7t33KyvDOivrGqIkaMXkbb8tfV/wb+Ftn4D8Mp4n1VI0laL5d0W6tInNUl7vKjJ0X4W6b4a0dp7xI1dV3KrJ81ef/E3XLDTZJLa2mjY/wANdX8XPi08cbQ2r4Ma7UVUrwXxJ4k/ti4fz3Ynf95qzlU5pl06MY+8JeXj3TGZ5s7v9n71ULpoyrbNxb/dplvIjrsd2P8Au/dqG8Z4s84FVGJp8RFPI7Lv2Y3fw1Ey/KXxuX7zVIoSaQOflVqRIUjZo9mWb7u6jm/lJjsNaPzofP8AJ2rT7e3SSP5E3f8AAaVI23bE+7/HVm12R2+z/wBBqZRK+GAab51rcK6JuZWr2X4V+KJmsVsPlbbuZF215LZwoy7zGylvv12Pw/1r+xdSi3u3lfx/Luaj7PukSjzHpDTPMzTb9zbt21X+7UqyJ5fnec3zPurHvLzbeb4fuN83zVNJdJbqXd/l+9tZqfNKJHLH7J0K3Ds2/YrorL/FU1xdTLy/zbn3Iu/5WrO0G6S7j8lH27vm/d/xVq3FqFkO/bhU2/N/DVEc3L8Rxfxm+xyaD50Mf+rXa22vIvC+qeTqDJv/AI9tet/GAGTwu6InKu3zMu3dXhen3Xk33/2dTzfZNYy5vdOo+Lmg/wBqaTFrFnCu2GL5mj+83+9XO/C7xpPoN/8AYHmby5Gwyt92u70vyfEHh99NmdTuT+GvJtf02bw9rcsPksu1vkq5R/lLpy3gfQUapfW5vIfmH8DLVO+sXjYYT7v3P9msn4I+Lodc0/8Asq7uVLr8qq1ddeWm7986MtTGRFT+Uw7GMRzKzorD+CrV1dalpOo23jDwxc+Tf2twssUi/K25W3LVe9hNrKPO2/8AAa2PCujJ4ruho803ktJF8kzfdVqqn7szHEcsqR+lDfG7Tf2hf2fvh98TIHT7dLb3lrqyr1E8XkKSfrnIr9fv2R/2ePhb44/4J6eH/h54/wDDlrd6f4w8GW7anFOinzVkgU1/PX+wvD4i0XQvEnhDV7qR7bT9Qiazjb7gLqwdl9m2Kfwr+ij9jfVpvHX7E3gPwxpF2bTVNO8H2CxqOsiiFcH8RX7fxIpx8IcmXapU/wDSqh5b5G218j+cz/gr1/wRl+KP7CWrX3xd8J6LNqHw/vNTkihvrdNy2O5vljkq18X7s6f+wYl2n/LPwlpJH529f0n6z8I/h3+038GPFP7OXxi8PwXtlrNnJBe2VzFuZNy7fMH+0rfNur+dn9vj4Zx/Bn9nvx38HFnEy+FCuiiRh98W13HBn8dlYeHdSnUynPGtGsNK/wD4DPU+/wCBIVIZdj03zL2Tt90tD4s8H+MI76FP3y7f8/LX15+y/wDtr6D8Afgb8R/h74wMl5p/ibwRfWFnY7fMjkuJF2xr/wCPV+eGh69No98uH2bfl/2a9W0HxNba94fNt8ryLF95q/FYylzRPl6lOPLdHpH/AATd8OXHhf49eIdPZR5T+Fd8bAfe/wBIhr6E8P8A7U/j79mr9r2bxF8P9VS0lRreO8Z4VctC9ugbBb7vBrwz/gndqE178ZtahuGJNv4adI8/3ftENZf7UXiWPTP2uNZtGuioW3sy2P4c20dfseeYeniPAnDU57PFP8qhz4SpVp4lSW6R+on7cX7GfwE/bA/Yd8Qftk/BDQ2sPGHg2wW91a3h+ZLrdtVt235vu/NX42+OrOG+0eLUi+4xru3L/E1fY/wD/wCClX7ZP7Ofwn1j4UfBzxho/wDwjviCyZL3S9S05ZdrMu3zN33vu18oeJ7G5utNuE1W8a4nm8x55NqrukZtzV+IYCnUw2HVGfT4X5HQ43rurF7/ABep2nwD1j7ZpJtodpaRFl/3v9qu71DQ7aWTeltJn726vHf2arq5s9ShheGMLHL5TRs+75a+hJtFuftHk71d/u/7q0qkZU5nv4P97SOMutN2nfN8iL8u2qt1oZ2/uYZAv8G75mrvJtH8yApLCrfNtSTZ/wChVWbQ7lY3/cq+1FXc1YnXUoxitDhJvDMcciJ833tzfPt3UQ6LukfZ/vIq/wB2u8Xw680f76237f8Anp/7LSWvhm2hcoE2Ue/GJUaJxi6O8ceyaHbt/harEOl/vmeL5kb5WXb92ulPhkys7/d+b5lbd81EekvDtT5kT7u2sqkToox5ShY2MNuq23k/PJ8r7a09Ntd0f2Z3ZUX+FW/iqS302BJmj2bv4ovOVv8A0KtbTbFPOd3hjKrL93+KvHxEYy5j1sPzdCa1tflWa5hbCrtZY/71eg/D2ForecncQUj2lmz2NcdYw21vJF+//cx/+hNXbeBwFiuI1PygptBXBHBr9E8D4cnihgLdqv8A6ZmfTZQ28VG/n+RTvrFBqczbnLyTOdg7L/eq/pOmwzNvSb+Hd8v3akcr9qnZlUO0hUEt/Dmr+j6f8o2Q4T5mT/er8v4ol/xk2NT/AOftT/0uRvOMXUlbuXNL0+2t5kT75kb5N0X8VW7q1RmP2OH51ZvNZX+7UkPnRqhR40+T5G+8u2p5vJaQQu+15Pmdo12rt/hrwVHmnzEy92HLymLJZvJCXhttiqu75v4qgWJJl+0wvvRvl+V62Psdt/BMrhvl3M/3WqvJYwqkoTcP4fMVdv8A3zXpUKxx1qPumVJG7wtbOm4r8+7Z95qz5rF7qaNLlFXd9xvur/wKthrPyZGe9RUh2bvv1Vms4Vm2Om9JvmRV/ir1aUuWR5EqMKnumRfaXN5LfY/ldv8AlnVCbR3WTzpkVTt+Zl/hrpWtUZl32rQpG23b/eqnqdq6x/YzMqK38TfdX/Zrsp1vd5TJYSMtWc7Jo9t5exAu+b7/AJi7qytS0+GSHYiKp2fJ5fy7f/iq6m40v5Wh2bj/ALTfvKx7+3SOEOm4FW+VVfdu/wCA1p7SfNZHRHB0ub4TktRs5vkheCRS3yxNH8rUklmlvIsPzI/zN5ez7y1u31j5k3z2bPtfcm1tvzVNb2264b7T5cj+V95vvbqqpU933jL+z4+1MG10ua3tTCiSNu+f99825v8AZrV03TXjYTeSybl2vGrfKtX7fSZvLV96qytu+Wun0XTXnsw6Q7fMl3bm+X5a5ec1+p+4WpmS4jDp5au3ypt+bc1QND9sjMMlttdfmZZF+8tXJY/OUyecqtH8q7v4afGyXC+dD5gb7ryN97bXycacoxufZYepGVU5jULVFY/3Ff5mkTdtX+7WBq1htj86Z1RJPu7fm2rXb3EbyQyTTIpSNd33/vVzer2Kbi88SqWXc/8As/7tdUactj6bBy5Th9Q09GbZDYeaaxdWiudzFLNY/MTc275v+A12l5YJ5ZmQMfmbYuysXVNLvFhWabcHk3KrMu1WolTlI+rwMonF30MNvav8m1vuuv8AdrEltUVuX+X5vlZPvV0msWMyxnlSy/N838Vc83O5Nn3UZf8AgVKnzU46HoYinSlQ5jNvrdGhG9FT+/TI18sr5PKt92rs1i80fk71+Z/4aiVXhV/k+98rbv4a9XD1OblPzzOKPUtaXDD5bGGbe393dWrp91bLcFJEYlk2p/eWsRZpoZGh+5uXan95quWeoOrOjpIP4E3bdzV6FHm+I/Ls0lyz5TpbUf6Ps3/vFT5FZ/vf71bWkzblGyFf9uTfXN2epJ5yRzQsqs+FZq6PR7oQ3AR+Il+dG21FVVIwPnqkrz5T2TwiNvw+hBJGLaXJ79WrN0+zM0guYXbZ/ufNWr4YZR4FicsMfZpCT6ctVOykeNY/szxiJduxll+Zv71fsHjK7ZJw6/8AqEj/AOk0z67M6EqmHwvlBfki3bxwthPsyr8nysq/M1WFs0muGCfIjfMqs33VpNJjcsf3zb9+1tzVqw28Ls6TIuFRfmXa25q/BqlT4YxOOOF5feM2PT03J/tf7VU9WtUhSZ4YdzfxeW/y10kbov750XLJtRdnzNWfeNbXEbpCmP4ZY/71XTkKUY09jmrlblo3+zJHv/jaOqElrtY3O9Vf7rfJ8tbt5pLwt51rCrt/zz+7VGRX8kOEUfIypuTdRUpwLoy5TLurPz1KO/y/7P8Ad/vVX+zorGZ4Nj/9M/4a0biGaGPzH8vP3dy/3agby41875kfZtZv726oUfsov23ve8ZF5HDIu9Fk3btu1fl21R+zwx7/ACXZXVty/PW3fQzR/ubx2YR7vu/+g7qyZrN9rn+Jv+Wcj/dpSjGJfNzEbb7hi6Phtnyxsvzf71W185ZDCjthk3MzL/FVNmeSREm3fL8zqtXdPuoWWVE3F9rMqr95VrmlGZ105R5i5Fa7Zgn3l3/JJ91lrZ0e0SFU/cx5Vv4U+9VfRdkw+RFxt+dpPl2/7S1u2qoWWySGN0jVm3L/ALVc1STjLlOunHmL1jbrbvHM1tG8kf8AyzZ6o+Hfi/oll4yu9E1KzWaOGDY0cifMzVbbVbCxs7i8ufl8u32oq/Krf8CrzDS9JfVtYudVheNdrM3y/KslfX5Dgeb99I+F4pzSL/2SHzO2/aV8O+Bvjf8ADW80rStBji1G1l3W80lrtdmVf7y18d/Dm8vJvDuq/ArxOjW17Hun0hpIv3ny/wANfW+i+JrbQ9WiS5jmeVtu6ORvu15l+118M3+1Wnxj8DWarqOmy+fcLCvyzKv3t1fUfFSPhIynFHj/AMM9WtvFGl3HgPUvmaRWW3kZPm8xf71cf4o0W/8ACuuTQ9DH8jbm+7V/xJqFtofiiLxnoj/u7pVfbH8u1v4lrb+IWqWHjq3t/EKWCxFUXd/tNWcZcpcY8vwnIR+S1mu/5dvzfM26uU8RXELq8L/NW/qF4kJe2+bd/e/hrjdeuIbiR/O521RcYmLfQ7lkTf8ALVPzPl/d7WFXLry1Yon9/wDv1RjX940CJt/vVXxGsRGh3fPv+X7zK1Q3C/3z/wB8ir01u6xhPmcN/DVS6X/pn8y1JRQk3s77D92o5G3NUt0dzbAnNQfOFJf+GgcdwzJt6fK1Sqs27Z8v3ahLZC59akST5vegQ5mVfkAXO371Rec7fJimyLtaljX5hl6B8rF+8Pkpg3rgB8bqmGyM/PRbKZp0THP/ALLREI7lhpfs9nvT77fKm3+7S2uW+fZUF0yNcHZ8392pLePzG/121m/u0fETI6rwyvlus0O1TXq3he4v5rf/AFyqipXlPh9fsixzTOrbf/Hq7qz8TTNZpZ2Vts/4HWnuxiYSjzFX4talusSk0yuy/crc/YH+Ftz8ZP2jPCvgm2T99q3iO1giVvmX/WL8teX/ABE1OaS82TTbj/Ctfa3/AAb9eA/+Eu/4KAfD55oVMVrqn2h2/wB1d1aYWP7xGOLl7PDM/rI+FnhWw8D+BNI8IaZb+VBpmnQ20ar/ALKqtfhJ/wAHqVjMPih8ANV2KYvsGqQfe2nc0kdfvbpF5i1V33D5f4q/FP8A4PMfh5P4m/Z9+Fnxctot0fhrxXNa3kiruCLcL8uW/wCA1jXhOXOb4KtSpxgjD/4Jd+PLbTPgjpDwzNuhtY/3Ky/e+X71fT3jL9qq6ure4s3RbhI7fZ5Myfd3V+Zv/BOX4uPp/wAEdLtdiuY4tr3S/L8v92vXdb+NU11cMlzcssW/a21fmZa/EsXTjHGzifteCq3w8Kh79qGvfCLxBa3P2+2aK5aJvlVFZLf5vl+WvKvF2ofCy0y/+hyyR3CrtVFXd/wGvK/E3xFdbGYQ3k0QkT/lncbdu37teI+OPiFc3WoTXM2sNLMv/H02/bu/u1pRVX4eYKkqHPzSPW/it4/8K6Pb3l9Z2cMRkf70d1uaNl+7tXd8tfNnxI+NV5rDNpVtPMSu4O1vcbPvf3ttYXjj4lX+pRy2cNtazRTf62O4+9/vbq4Vdck+0PeWdqsMXy/LG1ejh6NWXxbHBUxsPhge3fCi68PeH7W08T+MJLdEhTcnmMzL/u7a4f8AaI8YeAPHGuPqvg/wwthffduri1dlW4/3l+7Xn2s+NLieFrN7nA/55791Zmk6sLy8Uvufc3zs3zVpHByjzSbDEZpT9lyQMjxZp9/cafcJsVGX+633q5fwrHDDfLHsY7fvqv8AFXqfiHS7OTT5P9J3S/d2/wCzXCw6L/Z128yHaNu7dXp4WtH6tKJ8pjpSqVec6ixk8u3QQozfw7ZKmbUZo2f/AENVTftT5/u1haHcTKrbIfl3bvvVLc303lt/CjfeZq55UrS1iT7SPL7xrTalCp3/AHCv/oX96ga4kjffyG+VWX/2auea6SaNX6t93/ZqRdSeFlj37l+66r/DWUsPzRsRHFWkb0379Sjncu370f8AeqrNvkuNzv8Ad/hVPvUumXELRomxd27c7bvu1p3K2f2NUWFd0f3q4pS5Jcp0+05/ecg8L69d6bf/AOu+Xcu3c9fQXwZ8fbrpLY37GWR925X/APHa+Zo5vLuN8abt38TV6D8LtWmj1RE38KyrXnZhho1I8x62T5hOnXjGUvdP0s/Zl8aQzSb7+8kRfKZ0jk/iavs34HePptvnXN5IdPj/AHrQyfIsf975q/PD9mjWnjVLZ0kuPlXYq/KrNt+9Xsni79pTR/DujxeG9Nv98ELK2s3DO21v4tsf+7XzFFTniLRP0mlioYjDF/8A4KdftueKviPdj4BfBTU9Lht4dy6veSy7Z5N3/LNf7u2vyk+K0Pj9r6XStV+0TfZ5WiTbuVWZfvf71cj4t/aA1rVv2h/FHjbVNakX+0PEVw8CK+1fJ3fu/wDx1a9x0/44fDfxV4VtodS1JWuo5du2aL7q/wAXzV9xDBf2dGLnHmf8x8x7SljY/u58vL9k8u+Cfxe174b+Plie5kjWaVYrqFn+Vo2/2a/Wn/gnHcw/FL4q6HpNpYeWt226JvK2xLtb5W/2flr8sfixN4G1rUIde0GzjSaOVf3y/wAS/d219/f8EmPi+3hCfTda0+8ju72wRoVj+80a7t21WqMTXoUXGrym+WxxM3Uw/N732T17/gujrGlXH7XvhHQNNljZrDwbJZCTb97y5F3f98tXx9YtDcXRheza23fcX/np/tV1/wDwWR/aB/tP9uH4dWrXDJP/AMI5dXF/5kvzeXNIu3cv/Aa5SxtbmZleMM67Fb5vvN/dr6/AL61ho1v5j4vH/wCxYl4ZfYtzepoQW8yqgRJPm3bFb7rf7NT2un+XI7Ikasr/AHWXdtqWHT0j8uF5l3tu3sv3t392ren2McfyImx2+baybv8AgTV6tPD8sfdOH2kqgabao8aXPV/m3/JtWr9nNlAiIwRXZd3/AKFTbW10+3ZU3yI33VXf8tWLiG2kjPnTMm2XduV/lVa7IU+aPwlQ5ia3ZI9z+TlNm1mZ9v8AwGmX+yS3ZLZ1zs27f+ebU+RUuGFs/wC8/usqblVdtQzWt5HG8xRkeNNzK38S1p7GUT06EY81jD1BtpO5GVv4JGX5dtYt98siwyXLY37f3afMtbmoRoqs++QN96JvK+81Y+pQpJI0zw/Kv/LOR9u7/gVbRlyyOiWHjy3kYd5G6xMsybv4lb/4mteAlvCcmCAfs0oyO33qrahBbMw8jajbW2Rs/wB1v7tXLZQ/hpk6Zt3z9ea/Y/BySeb45/8AUNP/ANKgehklJRxVW38j/NHk2oQ/Zmx1Pzb1X7y15F+1N8TE8N6HH4M012+0t89xcRt/D/davbPESw6dY3GsXnywxxNLLuX5lVa+KviRrl58RfFVzfwiSX7VKzRK33tv8O6vyLmlI/Os0l7P3TzrWNY1LVrppnfJ/wDZqteH/B2q6xcL9mhZ9332X5q9x+Bv7IHiT4lXyNDpTGPfu3N8y19R+Bf2J/B/gPyrzWPJdoU3y7v4f9n/AHq09nGMfePAeIl8MYnh/wCzL+zNBGqeKvE/7q3hTzW2r83+7Wh+0Z8ZLOzmfRNKvdkcMXlKsfy/u67j9or45WHhHR/+EQ8Lpa26Q7llaH5fu/8As1fFvjjxlf69qT3E0zFv7zfxVjKXtCqceX3iHxN4qv8AVLp5nmb5vlVf4dtc7cTSSMz/AHfmpsl5tkO8sy/7NNWYNL99sN/epRibR5ZFmGR1hZ/PbP8Ad/hpkjea4T7p+9upPM2q33jz/doZkk3eW/z/AMCt/do+H4g5ZRDa8i7H4ZX+RqI18uTyU+f+JGanMvmK+R/wKm/xA7Pm/wA/LVgWfL+YfPuMlTx2IWHZvwf4FaorCT5d6Q4Vf4a0Y5I2kWd03bf9il8IvckQWfnRtsdNo+7/AL1dN4VtUuLhN7qpZ/4nrFe33ZfZyPu7auWqTWNxG6chfm/3amURf4Tvtahm0uxhuUdmP3Xqj/ayNgPcqzf3qZNqlzfeHXhkdsbF/wC+q52TWt1vE7pg/d/8epylHluL4Ze6ej+C9StmnG+ZflrsJms5labyd+19rs3y/LXlHgvUlhvPIQZDOqt8/wAtenSXD3FuHRIwG+VP9r/aq4GFT4zmvirHB/wjUqb8rXzrqMiR6mU/2/lZa+hfilJ9n8LmF0+ZU+bd/FXzjq0/l6kyd9/zVlyG9OPKd58PdWmWRbZ9uGqt8aPCvlj+2LZPlrO8D3nl6hE4/v8Ay16h4p0mbXvDaJs37k3U485Upcsrnivw/wDEU3h3Xo5t7bWZVr6XhZNa8P2+pWwVVkT5NtfLGs2NzompvAybWjb5a+gP2e/Ey654b+xzfO1vtO3+9T+0FSPNHmLV9ZPD9xPvfw1Hod5Na6ojom397uZmb5a6TWNJ87e8Lqy/M0W5vvVzV1C9rl4du5X/AIq0fvaGMZQ6n2P+zVqFjrGl3+q2kmWljtlmQfdVlVxx+GK/az9kb4v+Hdf/AGQvh38W/h1cq954R09fD3iWzjkIaOW3IQlgOu5QG/4FX4hfsbG3n+HdxewS58y4VSmc7ML0/Mmv1R/4JmfCfxF8K/2efHh1lbm1v/El3Z61p9vdndHd2EqiQSRDsRux+FfuWfUpVPCHJVf7dS//AIFUPHxFSNOUklvsforFqlhq+lad8XfC211aJWu1jX/WRt96v50v+Cvk8culfHG4jb5W8XX7KT6HVeK/oG/Yu8RnXfh5eaDc7cWN15aIvZf7tfgx/wAFMPhn4g+Kms/G/wACeENPkub1td126t7eJcs62t3LcsAP9yFq4fDWD+oZ5Se6w8l/5LM/ROCnFZXjqn2XRb/CVz8gbxRJGJk+Xd/47XR/C/WkW+WG6ucqz7flrnWk8u3NtNuRlTbTdFmez1VXR9qK27dv+9X4zKPJM+YjZo+zP2CNJi0743a3PAi7ZvDTNuVs5/0iGvJ/289TbSv2vdYnj72tluO7p/o0dewf8E8rqLUvFuoX7gecNDZSR/dM0RH8q8b/AOCi0JX9prWZliyWs7M/lbx1+1Y7/kx2F5v+gl/lUOKD5cW/Q634U69Dr+iRvM/3k27l+WovFGiyQtNv2vu+4q/w/wC1XmHwF8ZPDfLp83CM/wB3/ar27XI/7S09LhDn5Pk//ar8R5Z851VPd1Ob+E+gz6X4qea2+ZpGV/lf7rV9U2/h/wAyxttV3rNK0S7mX5W/2q+cfA9x/ZviCPzvLTzGXe0n3a+pPDOmw3Wl2z2G1921X8t/lWscV3PbymVoyUjL/sOGSSVP3ij5n3bf4qhm8K7fk8qNv7zN/wAtF/vV2cWj/O8zp8u/5GX/ANmqWHRZo2Donys/z/7P/Aa4Iy97mPW5eY45fDsIHnJbNj+63zfNVa68NzNM3lQ7g3zO33dtd/b6L8/kukmVZv3i/wANQto1ybzeifMsW2X5PvNWsZF8qPN/+EfupJpPO8z737rb/DVabw26t51zD8yvu27/ALtemXnh942Z54WR12/Lt+9VSTQfOje5RPm+Zt3+1/dquXm94qnzROAj0vKtsmU1NZ6fM100c0y/vNvy7PmWuqvNHezj857ZfvbnVl3fLVGaxhWRvL2gN/E33lry8RTnI9XC/AUre38zZZ+TCu6Vn3SLu+Wut8FYEVwocNtKjI/GuY8txtnR5FX/ANlrpfAkkslrO0wG7eOQc561+g+CcZR8T8F6Vf8A01M+jyjl+tRt5/kSecp1WZmfcquVK/3a2Le4gZXRXZVZ9qfN/wCg1zGq25Oq3DRL1fMjf3eatafrVtb2f77cxWXbtZfm3V+T8VR/4yTGt/8AP6p/6XI6pStUfqdZDdeWwhmeMqu0bt27/gTVat7rztsW9lmZ2+bd95a53T9Q3fvkRl+b/vqtK1uEkuw+/P73cjbP/Ha8GnHlj7ope9K8jUmjRt37mOTa/wB6P+KqrRzRr/pLxoI5Wba3zKy1JHev8sNtCsSLufdG/wA26nyTOy75kUbvl2t8yr/wKuqj7xjWiUNzysyFFVJF3eZ5X97+FqpfY9t1strn5Nmf+Bf71bUlu8m3Ztx93cq1Ev2OGRfnjVd/z7ov9mvUp1IxjocFTD/aM2GR928wxumz5tvyt/wGotQhs2s1S/8Al2/Nu/iZqv3UKtGyPbRhpF/5afwrVKS3jmdI25C/89P4a6aco81xRjywMi5tdqMHhaRm2/vPustZM0KLM9480Mpk/uxfdrodQs0jxbXMG9P+Wsbfd2/w1lyQ/vPMh3IrLt+5826unm5jqjTj7pjQqjeY/wAuxtyptpI9PDKqRWzblT52ZtrKtaDWm26aEOzLGnyNIvzf8Cqdbd1uI3+6kn3lqZS5S/Zd2Q6RYI0iPcwrtX5F3f3a6/TbWz8yK2+6v3l3S/K1YNmsLW/nJbRo6xfIyv8AL/u10WiyWduy74fnk+58n3awjHmmRKnyxsZlkqW+/wCzTb337lb/ANmq/CryRiW5hVfLTc26sqORGm+R12Ku1G3bflresY0aWP596yfLtb+7/tVzfVeWPvHRg8RDnMnUNJ3XGy2dWWRd37n7tUb7T4Vgl3vtaZ9qsy7ttdZHapC3yfM0K7UkVfu1TvLNLiObzrVmVvmt41/ho9n7sUfV4PER+ycBcaNC3yfZm/h3x/dasbVNLf7QyTI0iqjNEzS/davQdS0+bavnfKyurbVSse80W1W38mGzW2VpW+9/49WVSj1PqcPiuXU8u1zQ/tFudm0bvm2s1cNq1rDb3R3wqu6LajR/dr17XLGGNXSFFeJW2LJIm2uL8RaTtm2WyY8v+LZ8rVzSjyy5uU9KWOhKHvHE3NujLs2bR/Gy/wAVZ9xJvk2SIyeZ8yK38VbWqWrpcC2Ty0/vs1Zd1bw25NsjszRv8+7+KunDx5veR8Zn1TlgVwqbm877sf3FZ/mWiO923CTeZG3l7vvfwtUd0IoVZEdUP92qzRzXDPeJ8nybtyr/AA17uHjGUD8mzKXNP3TpdLvNsgLurD/x2up8NapCzJv3I38bSfdrgdNaRYd6Pvf73zPXQaTeos7pNCoGzajbqyqPl0OTB4WdSZ9FeELjz/hrDcu2c2UpJK+7dqxtN1SBoRCky75Nq7tn/oNXvAsjn4OwSZJYabNz7/PXGaffNt2Xn3vlWJlr9d8ZFB5Hw7zf9AkP/SaZ9tisPJ0qKttFL8jvPtzSS/vo2Pz/ACf7VbGntDcYh37VWL5P96uJtdYe3aLzpGKtKqbfvbf9pq6O01aFd/kxeay7WT5tu3/ar8G5bdDnlg5RidVH+7j2TTRgNt+b+L/gNV9Qt/Lh875VVvut/FVZNShmj2PlZJEoW8Ty/M3rtmTDM1aR5ubU4sTheWN+UpahNvjif92VjVll/h+Wsa68ncH3/Lv2/K1at5cQLZsjooSN9qsq/NWJeSPNIH3xhlX7uyuv2cJanj1JSo6lW6vprWSSFEVvm2vt/hrP+2PHy6MXX7m5/lp80iWcjJvVmk+b5j/FVKS8e0kV5kWTav8AqW+5/vVhyolVJT1HzTPclER9+35nXf8AdqnI3mQPeZYOrbdzL91qcuoTXUoRE3N/DGv8VZV5cOofzdw+f56JU/d906I1I815DJFdLpHf52/vK9bGkzbRshh3J/Dt+9/tVh+e8Vwuzcm7/wAd/vNW1prXJlXztpVU2p5bVxVo8ux1YWUZVToLHfCy7H3xSMq7W/8AHVrZtbyGzj+eTyW+ZW21z1jbvcSLbQ7ZFZ1+X+7UHjzxRbaLobfabzykunZIvk/iWsMPh5YutGCOvF42lgcLKozk/ih48v8AUGmsNHvNiwqzIqv823+9Wt+zr4q+1aXqUOqvCvk7fu/eZa4hYbaRWv7x/vK33U+aSsb4f+Jv+Ed0/wAQ2fnSb2fzYlr9KwtOOHoxjA/HsZiJ4qtKc/tHV/EXx9Db+IrqPTXba3+oaT5tv+7Ulx44m8TeGWtvtnmM1vsaFvu/drynVPG0OtSx6qjxujf6pf4VqnZ+NLzR4bh/tO9G+Zlb+H/ZrWMZfaMOXljY57xp4Zv9FYeHtZTat1un05l/u7qX4d3TzWM/h7UtrM25oPk+bdXD+LviXqWueKvO1C8kfy2/dbn+Vf8AZrW0XXNl9Hre/bL/AMtVV6qXJKRUecf4i0W50mR0kfO52b/d/wBmuD8QSI0zJ5fzf3q9c8ZW9nrUKarYP8zLuljryDxtDNb3pR/k/wB2lKMTSPwmZb/LcL91tz02aRFun+6GZ/u/xVHpt2i3A85MfP8AJUszJJqT+S+4bv7lTzcpfuiMybS7hs/w1XuIXjjbZ8zN83zVa+zlpFmR/vfc/wBmlmhdfnkfe1Vyi+EwbqPbJvd9x/u1HIu35CmK1NQs0jf59uG+7WfIzqv+7/eqYFRIFXHJpfu/OvVad96Ty+opu5P8mgYrSPu+Y4+amt/fBprM+Pubv9qlb5iv8NVylcrHFvMHNWLMIkZbOHbj/gNQrJtX7i0I5jk2P81Ll7kiyLtbzEf5qns5JGb+HctRzSIsfyfxfxLV7w/Z+dIsju2Vf5l/vVUdifsmzo2xpP38yt/Ftat7+0o7e12PxtTcrLXOeekcmyGH5P46g1rWkmtRDDNs2/L8tHwklHWNQ+2ah533Ru/75r9NP+DaXQ7O8/bi0HWL+FtlnazTpNv+638Py1+Xm52kXZ8y1+rf/BuDpM0P7R0GsI+1YbBtjK+3c27/ANBrbCx/f8pw5j7tA/ps0rUY7nSVuIZg4ZMqy1+f3/Bf/wCDFt+0D+wF498GtazTX1nYNqOmxr8376H5lavtLQdcubfSVe5h2Lt/4DXjn7S2oaJ4i8M3+n6rbRyi4sJoNsn3W3Ltr0qmH5YTPGp1nTqxkfzX/wDBPv4n3kHgCXw3NcyRSw/Kit91dv3q+ktH1K51Ngkj7/L+Xc33l3V8d6v4d1/9lT9srxj8Fp4dkcetyPZxzL96GRtysrf8Cr2/S/FXjCdg3k4Vvm3K/wB2vx7PsCqWMk4R1kft2S5l7TARS6HfeNNak0zfZujJu+42/wC9XhXjbxRcx3E1mkyxJI26WT+Jq0/GnjzxI0MiXj/vY22xSK+5VrxzxLqGt6g0syOz+Zub79cVDD1Yx946cViox94s+ItbtrxWm+VnV/mZX27lrndS162jzsh3rJ8v36y9RuL/AHohfbu+8u+sxVubpmKI277rV6tHD80uaZ81iMZJz9021v3Wbe83+8rVds9STyx8mxVf5KwbGzv2X7M77trf3a6G10dGZY4UZn2Y27a3kocpz/WJS903YdchvIxa22mqzL8ryb/vVj6tY/Z5C8w3bl/hqy1reWeLZNysvzNI33aZrEn2O1KXM0Zdk+Zt9cs4xpStE29pzRMZm8tVdEb+9tZ6RtQS6xvTG35dtV7rUPPt1SF1A37fmqD7VCqsic/JWnLOpH3jmlU+yTSXO3cnzbPvJTdztN58O5k/u021WSSFvvbtv3WpGZI38nzMj+6v3anlZjzc0TX0q8JBSSFt38Tf3q05LzdGX3rtbb8q1gRq8Mfkw8NsrVtWS4ZH+78n3tny1zVKMPiiXGpP4TQ0mxSa6CIjGvafgT8J9S8W30cMNg2/cv8AD83/AAFq88+Hfgn/AISDVIk/56fd+f8Air3rUPi5pvwv8NJ8MfBu1NSuLX/ibXnm7mt1X+Ff9qvncbOpKfJT3Pey3Dyl70j0bxJ8WtB+F+kxeAPD1ztu9ipcXi/eVv4trVW8L+JLHxFY/wBlQwyR7YGSWNpdzKv97/vmvljxR8SPM8RS3szsfn+9u+61ei/AXxlbah4sT7ZeMqyIq+dD83y/7VdFDK6dGMZH1uHx8f4VI4b9qT9hfVdHjPxF8APNdabfNvWOT/WK38W3/Zr50tfDnimPVF0SFrpWkfbtjf5lav3Q/Zd+Cfhv4xSN4e1J7O5s5NNkb7L9nZpF2/8ALT/ZrmfG3/BG/wCCGh/Gq0+LV/4kXR7O1ZZ5dH2My3TL8zfN/CtfZ4bGYf6rH2j2Pl8VlmK+uSdHm5T8aP7H8ZeCvEU3h7Xtakja3+ae3uH/AHke6vob9kD9r7w9+zA1/r2t63eXiyRfuNNtW/1k38P+7XOf8FbPCNn4F/4KF+OrPTbSOCzvILG6sFh27fLa3Vd3/jtfPVncTRtsRF+X+JvvV6VTJsHj6UZT6nhQzrHZZiZcnxRPRPjn+0H4/wDjJ+0TJ8ffHlypmvtsEUcLNttbeP8A1cdfdXwP8Qv4q8A6Zr03lyzLEsXzf7vytX5z/wBnprmi3Wkv8zsu5Pk/ir7c/wCCefie28YfCtLCbafsq/Pu+9u+61ep9VjToRhD4YnmU8bXxGMlUqvmlI97+xwxI6Im8xtulb+7SWtvcsq7XbLfLt/2au/Y5biSJ4XVGjfY235V20q2t3CyJc3imVW3/wCzV0aMT0JVJhDZ3MMhfqvyq+6tJdNf7Ozz7Qdn+rVfvUSQzTQq9y6p/st/Cv8AwGr0apCsX2l5JfMbZtVPl+9XoRp/DE2oVoop2dncttcTR4VNqbU+Zf8Ae/vVLJbOyvD8z7l3bmT7tbOn6PYLIJrNJA7Ozyr/AHamm095oXSH7+791/u0/ZxjM9jDylzcxx+r6SnlmZLbcvlfJXJ3djNCu+HzJUj/ALy7ttei65psMkbTIiq3yqkO9vlb+L5a5bUrU25ZIpo2XYrNIqfxf3f96so0+WV2exH3onF39iJlR/sf75k+Vv8AZq3Cgi0J0I4EL8Z+tbdxpttcMl5NbNv2MyfJ92s+5hit7eSJ8lQh3ce3NfrPg6n/AGxjv+wap/6VA9TKafLWn/hf6HhXx8864+H95pNvcxq940aRbXbcy7vmWsP9nn9iSfUJrTxP4qkjtLPazr9ob5v+BU79pD4oaT4B17RtNeGNyzSTuqp83y/d3Vwt9+29r+rSQeG9NvPJt40VIo93y1+RU5TpxPyLOoyqY6UeY+zm8U+A/hzocWieEobWJ412+ZH/AOzV458bv2gNSjsbjTbaSMBvuSRv/rP9pq4q1+IQk0NNVvNY3Oy/dkl+b/gNeF/Gz4xPfM0drNnd8u3+6tTKU5Hl06cYHM/FjxxeaxqUjvfs3zV5pdaghmb99z/H89R61r1zfXUrvMxO2sxLhNob/vqlGJ08vuFuS6eRm2PgP/E1FvI6gd9tV1b5V2fxVatLZ5Gx/wABar+ySW1kQqrn5m2/99U7a8ap8m41Yt9PeGPyf4lqOZUjYohZT/tfdanLYrm7CKvkr5z8t/s1D9q3RqPvf32qTzP3bfdVmWoYVmmk2TTLto/vEe9KBoWrPMR/Cu/+Kr1qu2M+duB3fJVKzk/d4Sf5v92ryvuj8z+Jf71EthfaL1rskjCZ3VqQxwx4SZF3/wB6sLT7pGZ5P/HW/irZs5hIq+Tt+b/bqJf3Q5jet1SbTXR0yVX5FWuFuL6aOaVJnUlX+7/drrYbx7LdC6NsZa4TxRNNa61LC6bQzfJVe5yExly+6dR4T1ZLeRHTd8zfOtey2d5Mvh2F0+f5Pl3fw18+eH9UeGZN6bm3V7Z4buPtHhuN0f8A2k3VRE+bm5kYnxSvJv7FmR0bKru+Zq+e9ZkdtQdtn8Ve6/Fq8f8AseTCbvn+6teCXs264ft81LlRvT3Ok8Et/pip/DuWvd/DbvqGisg6bPusn3q8C8Gs8c4fzPlr6G+HLPcaLEnzKuz/AL6olsTI8a+N3hN7O4S/httqN/FR+z34lXw94si87lJv3TR16l8YPCsOqWL232bYqpvVq8E0ye58N+I1m+60cu7a1HwwJjLmjyn1pqFnCrM6IvzfdaOuS1yx8uRf3W/crN975a6Pw3qn/CQ+H7TUofnZol+61VtSsdzF3T5Wb5KI8pnLmvyntf7Bs0v9jeJLUnEa3Vs6JnO0lZAf/Qa/oz/Zy+Glh8VP+Cffw+bQfIOsRfDy2g067IwUlFuB5bMOdu9a/nN/YSSaPTvEsc0SqRNacr3+WWv2P/4IZft32euaXqX7LvjHWD52ialcLpIlkXCxeYx2LX7XxLVqUvCHJJw/5+VP/Sqhyxp0qladOps0dD/wSS/bYXx/8RPEHwu8cQw2GvabqU2k6tZru+W4hkZflr51/Zu0LSvEv/BXi58M65ZJPZX/AMQfEttd28vKvG6Xysp+oJqT4paEf2CP+C0Gs+IfGem6hbeDPiVq0epadfabEqotxJ95fm+X733qxv2d/Fh0z/gqefGlphQnj/XLpQ3PykXbYP4Gujw/hF5bnNWP2sNL/wBJmfVcBVWsuzOjU2hTl91pf5H5W/8ABaz/AIJz65+wH+294m+GttpzJ4c1mRtV8H3Cr8klrI27y9396Nvlr41+z3OnybJk3N937v3a/qz/AOC+n7CHhT/goj+w3f8AxZ+HtvFc+Mvh/ZSappDQL+8mhVd00H/fO5q/lv1a18lnhv4eGbbu/iVq/Gq8VUiqq6/F6nymDrulP2Utvs+aPpn/AIJkXjT+ONbjJzjRCc/9to64r9v+xa6/aM1zcoJFpZtF6/8AHuldd/wTEtltviRrscS/INAwD/22jql+3vo89v8AG67161wwltbeOZW6cRLX65jnzeB2F/7Cn+VQ1fL9bfofMnhnVJvDfiCJHb5Gb+9X1D8O9YtdZ0XZ9syzRfdX7tfNPjLQUs5BfwptGzcn92vSP2e/GiMwsLl4x/CjNX4rKMoy5jq5Y1D1DVLFFV33so/vfxV7v+zP4y/4SDS/7HvLlvtdr8qKv3mrxbVLdJUf+JP4mjrQ+EXi7/hC/GVvfzXrQ20cv73/AK51GIp+0pamuDrSoVY2PsS102a3XftVU3/3v/Hmq5DY7vKS9uYWWT+KP5W21f8ADa2eqaXDeWj+Yl0iurf71X5rF/tT+dDH8qtsZv4a8aP2on2kOWMIyMZrENNNcpzM3yptf/2Wlt9LmaT99bK7SfM+35fL/u1t2FvcrIm+2/dN/rW+Xczf7NTx6f5fm/Zn2su7czJuX/erqpx5SpRhL3kc/JpPmMqeSobYu/c/zLVG80G4RmdE2ur7naNPu11dxp6Md8aKPM+bc33WX/ZqrcWaLMszoxMbfJteteXrEv2fNvscNr2jw27bLYfe+bbXI6tZ201w/nOqlf7tejeIo/LV0tvur8/+7urg9cX+C5SPfv3Sqv3mrhxETqwtNxlpsZUy7NronzL8v+ztre8GmX/ShNFtYMoxtxxzisGSTbb7LN2WNW+9I3zLW14DkaRLrc+4goC2c5ODX33grGS8TMFftV/9NTPpsqjJYuLfn+RS1S8c6jcxoR8s5VAG6tUFveOqyzPN95tyeW3zLt/vVU8Q3ccetXLLF0uWUr75+9UcdxZxr5c0yp8zN8v3q/KuK1y8QY3/AK+1P/S2U5fvZerOh02+hiZH87ezfNu+6tbFhqSNMyQzbiv3F+7trjdJuIfOl3uu2P5f9qtWO8SO3i2fON7eUv8AEtfOxpxK5jpYby5W2U20OxtzM8jNtVqtrdItqsPks0n3du/+GuSW8fbsSZYxu+dZP4f92rENwkimeZGRV/h3blZa6KcvZil73wnVf2l9nWSN3b5W3LHH/wAs6hkuobi4dPO3DZuij8r7zbvm+asdbqFYVENmv7z5vvfeqaPU3877NNHtdX2p8v3lrshU6nPF+9yl9FhXek3mMPvJt+9S3kiTSIXmYbdvzVUW88xt6chfuSf7NPhkhZBsf5t/9z7q11U+Y0jThLcbLb7b5vMg+Zf+Wn8NUZrW/uJnxwW/2/vf7VaS+TcKfOkk27vkaR6j8l3lH2l8n5vmZq29pFnTTp8xktb7Wi+8LdWZXb73zVFbr5kcT3KSebH99vvVqzW8NsoSFNir8yKq/KtUJp0j+/OqM0vzt/e/2axliPsm3seWXNIfDHCqq8kflq1XNP1JGmTEysFf5V+7urMmvIWxvnVEj+9tbatQ2+rWCs298v8AfXd93bUU6nvcxliKfNEsaTH5jeTI6lvN3I38P/Aq6rT/ADiv2nYp8v5XXbXI6DdWrXw/cq0K/cZfl/3a6XTZJobYpvyixfJ/e3bq9mOFPksHjuV6m5NFcrG6Q2ak7l/75qK4Xy13xbWG/b5bfw1HHcJDGv77D/3ldvvUbnkZYftKn5NzbazlThy6H2WBx0YxKGsWrzWjJ5LM7fN+7f7tZGpaXDcRt/rFaNPkVfm3N/eZq37eHbuM8Mm6Rvnkb7tI+jp5jPDNx/47XLUpxie9RzCR59qGjzMuy/SMp/C1c3rWhwtG++Ndm/7rfLXoN9o8y3CvcopRXb5VT5WrN1bS0+z7Hhyu/wCbd91q4akYfaOx4zqeLa1oNzDOERF2/wC0n8NYOpaO7SeZbJIyf7ler+INHhZm+9tX/VN/E1cxqGivIj+SmI9u5P7y1zU6kPhPMzHEe2gedSabud5pkYFf71VPsfnTL53Cbv4a7XUvDcLRiRPut99Wesq60eaMb4YVO37td1PFRUeU+MlhZyqmE1uI22Q7VZfv1cs7mSOLe8Pytt3r/wCzVNLZ/ff5Vaoo7d1Xe6ct9/8Au1MsR7h7mW5Tyy5mfQ3w/d5PgbE6Mdx0y52nvnMledaHs+0IsKyMjJub/er0T4flk+BUXmDaV0u5BAPTBkrzfR7xIrgyfN8ybfv1+0+Mkr5Bw5/2CQ/9Jpn1uCwUa3MpLbQ6KzaS33TO7B/9n5q6PTNSfcJndnXZtdWX7tcYt0I4xv8A3Urffb+6tbGjXU0ca2c028Q/fb/er8HlsXiMvhGB2NvfQtZpcwuxaR2/dt96pZL5/MPnWys/ytBGv93/AOKrI0/UHZoVe5kxJFslkjf/AFa1ejuJoZEuXT5N7bv7zf3aujKcZe8fMYzC+zEupHYB3fcW+bb/ALNZ1zFCv+kpM0L793y/Nuq9cMFk/fP8qxfKzVnMYbiNLkeZiNWr0cPKEY8x8Zjo+8Z+qIkyvCk251bc6/3t1ZO65t4fJRIy8j7fmrXuLX7RcCaZ1Yfdba+1qpLazeQ/nPtlX7qsu6meVGN5cqKK/u5ilu+197DdH826qV1C/mbEePYrfvVVdzf7taFv9pdvO+b938y+X/FUN5Cl1I6IjIfveYv97+61ZVJcp10/eM+GNIGCXMLSIr/Ku75V3VrW7Iy7O2//AHaoNC8mwb2Dq/yzNV6z/wBVvmdVZV3O2371cU/fnyx0OyjPkgbenWd75rzJu+Vfn2/dX5vlavL/AIja1f8AiLXDc3kzOti7LBD95P8Aer1TVtesPDPw9ub+5eNb24XZEq/ejX+9Xh9xq25pnfa7N/rf71fVZTlqwseefxHw+e5tPG1/ZQ+CJLca1Dx9mflV+f8AhauB8QaxNayav5N/+8ktWb5k21sXGsQ/an875dv3WkXburjvE+oPJcSOU37lZNu3+Gva5keDGXMc74X8TyX2mvZu+3y33LVbxJr01vZvDC+3cm165LQ9S+y63cWzuqrv+bb/AA1Z1nVHm3Ojtt+7U/Ea8v2jntSkK3hmL7h/drQ0fxE9rsff9779Y+rXEzMfT/x6q0Nw8Mmz7o/vVXvDPSl8bTTWqIk/8G3atcR4q1Z7i6Z3m37XrO+3urDfM33/AOGq11cb2MzPv+ep+yVFdSezkjmmCdBVv54p2fft3N93+9Wfp94isf3K/e/iq5DcJNcStvXf91F/hWqiEi6sPnAp8zL97cvy/NTrhvOJR0bd92ls5t3yI2P4an2/aF8nDfN92iRJlX0ICj5GO37tULyPZIX2bS3/AHzWpJI8LOm//gNUbqNt29ujfw0cvuDiUWjEY3r/AHf/AB6omVBtf+7Usy7JsO7fLTX+6amBYxsK3+9TY1SRfmFO2p5fzPxtoVkA/eL92q/wmhLbxou6SnyRoyq+aiWfbJj+KpFkRmbZ8q/wU/hMyGRvmCfMK19PuPslq+yT52X71ZTHkO/PzVJJIVX5Pl20vhAueXMq+cz7T/HuqrcR/vPv7v8AdomumkkV3fK1Esg3BE+7Rze+KI61jMjq7v8A71fr1/wbr6GF+Ik9/Mv+rtY1Vt/3vmr8hbFWkulR143V+y3/AAbo2MMnifU0eNUElvCu6Rvut/Cq11YL+KeZm3N7DQ/d+G+vG8M9Wc+Uvy79zbq8H/aCh1K40+5hEMgDJt2s3/jtetabrW3R4ZvtKv8ALt+X+KvOvihrFtNG6Xm5EZGXaqfM1etWlGUbHz655H4Uf8F0PgjeeD/HnhX9pnRIdzLL/ZustGm3y/8AnnIzf+O14z8P/ipqWuaFDZ2t+vmbdz+X8tfp3/wUi+Fvhv4+fA/xX8N0hWaa4sJGsNy/NHNGu6P/AMeWvxh+B/iCbQbiXwxrULQ3lncNBP5n3lZflZa+Dz7CxrR5o/ZP0HhvHyivZSkeo+Ntems7x7OZFdmRX/2f/wBquI1rxEn2fZD8rf8AoNdL4sv5ri1d0jVw38X8S1wGqSbpN77lG7+Kvmox93lkfS4itzakEl0j/vl/4EzVWs7qbzC7u2yopo2bckKfNv8Am3PSSXDxxhNn3U+fbW0Y3PHqS5joNL1az8z/AFKsN/ztXT6fq0PmK8KcbNu6vNPOdWZ0f5fvfera0G+nuF8n7SxH91WqpU5Sjy9DOMonS+JvGlhHCkKQ7m+5uX5mZq5TVr57pdjou+P77Vt3Glww/wCu8sbvubfvVlappVsvHkbhJ8qbayjGJpUqS+Ex1keNvs2PmX5qmhyyqMr5rf3qmaxKqnyfN/ufepjW8xXfNt++yuq1fuSMSb5Gz2Zflp8MTsfLSLPz/wAX3ahjjdJmdPu7P4f4astJbSMqu7Db8yMrferP/CVH3S3Zw/vGz/F8tdHpOhvcXUNnHD5u75vl/irDs1e4/wBG2Km5Fauz8LskNiPJttr7/vbvu1wYyc40rxOnD8kp+8dVJqln4B8Oslncr9rZFVdq/NG1cHrXiSaxie5v5mNzM7PLM332b/4mtLxE2pahJ5yWy7Y1+9/eavK/iL4uTQ9Sks9Sm33iou23j+7H/vVz5Xl1Ss/5mz0q2KlGPLD4S5Lr1zcTPc314w3P/DXf/D7xF4k8MtBqulWczN95dybVZa+en13VdVvA8shyW/dKteqeBNd+Jul6cdSe+kks44NryXS/u41/3q+ixeXVI0uWJhTxWIpS5oM+w/gd/wAFfPGf7H3iKy1RfhbFqDRov+kQX/ltt/iXb/EtfYPgf/gv/wDsX/tDwPZfGfwvdeD7hYFi3TKTHNub5tzCvxK8UeNptc1BpjMs25PvL93/AIDWV9smuG+fbtb+7So8NwrYflm3GR6dPjKrhf4kFNn0X/wVd+Onwo/aG/bq8Q/EL4Faw174Yh0uzsLC6aLarNHH823+8tfPI3huZNy1FGr7lfzF/wCA1Lbwo0jpvbb96vrcNRVChCn/ACnxGKxEsZip1nG3MzqfA+oPa3SoNvzJ/F/DX2D/AME69DfT18R6U9s0aRtut/n+VfM+6y18XaLdQ299E7plPl+Va/RH9h/w2lj4FufEKJGEvoo03bPvbf4d1dfN7vKclH+PE9ks7P7Ooebc6L/Ft3Nuqe3t7OOTf5y7Puouz5v96rl1aw2Nos1m8m1U+dlp8ln9om85HbKpu2/w7qdOPunr8w/TdJTzXQ3KqjfNEq/erRtYUkuG2o22NP4k+bbUelf6tUR+WTa+162NO094pt7ou77sSt/FXXTjbQ2oykP0ezhjtVdEZ0k+bzF/i/2qufYZrhWeZ13Mu3y4027f+BVdsVSSNXZNn/TPZUqKiqs3zJu+5Ry8vvHu4eUzmdY0XaoeFGx8v75vux1yGoabCyzpvxGzs+7Z95q9D1RfMt/9Yynd80a/d/2WrjvEFrjMPy7vv7m/iaspS6nvYVc0oxOaax3bfs0TKNi/L/eWsHXrdYtTnt4yFGQAc9MgV1Fn9p85POf5W/8AHa5vxYEXWbkwtuXAKk9/kFfqfg3K+a49f9Q1T/0qB9JhMP7Jyfkz83/2zvH02tfHTWNKhvWa30eKOziXZ/F95q8z+Gun3OueKLazQbjNKqqzfdq1+0Brb6p8fPF04fcs2syfN/u/LTvAMkOi2dzr1y+Ps8X7pf70lfkPwn4bjeaWKn/iOu+MXjz7DeTaPpV5ugt08r92/wAu5a8f1zXJtQkMzuzNTvEWuPqF89y82fM+ashm8xi+/NL4viMOUb5j+WXfrUkK+Yi92/u0kcLyJn73+ytaulaO9ww2Qtmr+IciGx07ciuXZt1bWn6SzSb0Tcu2tzRfB7rD5zwbl/2q1W01NNVvMRc/3a15eWPKY/FLmOcuLN7VS4RtzVmzruk3gfdrX1q6RlZ4Wwyp92sCaWaSRn3rtrKUiox5iG4mkZhsRm/2mpbNXVmR0/2makaT92u8MWp0Nu7HY7712bqPhH9g09PX7SypvVVX+8lbDafM1rvh+Yt9+sXT7jbPs8v5P42rpLOS2EOzftDVXMTLYzPsc0LDzE2urf8AfVaeks63I+78r/OtLdJDx5PPz7X+f7tNjkh3L5Pyms4+8HLHqei6Xoej6tp6bJtpVNvy14/8YNPfR/Ewtndl+X/erudHuHjtmSzdlZdyv8+5WrhfjJNcTX1tNO6lvK2s1IcY++Zfhi58y62TP/Hur3jwTNu8PiPzFYLt+WvnTQbt4boP8pr3X4bXf2rw7M/zDyU3Oy/eq/hCXPsY/wAWtQdtLebqjbv+AtXicm+SYu235q9M+MmpbbYW3n8Nu+X+9XmKcMKZdOPLG50Xg9Q1xGm/Zu+81fQ3wzkeTR1hhTPyfNtr5/8AB8byTRun3d/8VfQ3w3t4Y9PfaPk8r5f9qjm+yYy+Mf4wvIZIz8kgMa7NrfxV4d8QvDL3DS6lbWzZVq9j8TR3OoTM9ykg+fbuaslvCr3y/Zns2f8AiWTZTjyGXvc/MWP2cdck1Dw7LpT3i+Zb7WWNv7td1qVhuje5R8n+JVT7teT+BY38A/E6G3mdhDePt8xvuq1eztcuF2b/AOPb838S1Pw+6aS5Ze8ep/sSwywW/iZXl3KZrQp7fLLxVT4X/tKeL/2Z/wBqnVfHnhm8ljFv4hmaeKNv9bH5p3LWt+xzapbJ4meOYMJLm3baP4OJPlrxj4vgp8YvEUpkwx1mcYP93ea/aOJkv+IN5Kv+nlT/ANKqHDDm9vI/oq8afD74W/8ABZf9hDSvEXhnVhF4m0y1+1aDqqsvmQ3ar91tv3dzLtr8/P2aNW1zwB+1rZ3vj7TrifVLK71WDWLeGLMhuTa3MUuF9Q7E49q80/4IH/8ABTC5/ZL/AGiYvgJ8SdY2eEPEk+2CaaX/AI85m/8AZa96+HGNd/4KZ6jNpl2TBcfEHXJWlgj8wvb77pn2juTHux9RUeFNWdTKs4ozfurDyt6NSPtOFqUaeBzSsvidGX4KVmfcn/BPr4z2HinxBefDfxBdE22u6cYfsrtuVm2sv8X+zX8zH7UXw70TRf2jPif4M0dFa20Hx/qlratH93y1uG2qtfvx49h1T9jb44WXxavrdbDQZory98OtM/7xLVYW27v9qv56de8ZXniT4yeJ/EOpXLSN4g1y8vJWZNvzSTM3/s1flmNjLD1H/LI+Cy+pCtTjzfFG56f/AME1bO5sPipr9tJjYNBbaSuD/r4q6L9sXRIdX8Y62hhYyiG2MbKM/wDLJaq/sCWhtfi7rpOfm0E8s2T/AK+Kt/8AaHla5+MGp6YzrseGAYbt+5Wv1nG/8mPwv/YU/wAqh0yl+/b8j5LmtodW06awuUZXj3LuauY8GapL4T8VGGZ8bZfl3V3HjDT30HxhP8i+XcPtRV/u/wB2uF+IGlfYNQXV7ZPk3/O392vxeXve6dlGUubmPp3w7ep4g8PR3jvhW2/Kv/oVVNQheO4kmh/hX+H+7XD/AAF8YPqGlrYPNv8A9lm2/LXfaxE9quxE3tt+8r1HN7tgqR5Zcx9Zfsb/ABSfxl4Jbw9eXO6fTX2eX95mj2/LXsPluxdPL+Zvu+dXxB+y/wCPH+HvxSs7y8m8uyuv3V02/wC7u+7ur7qlKXE3mJNHLbyIv7yNflk/u1w1o8srH1WU1vaUOWQ7S4Zm80ImV2VPbJeMpMKfMvy/7y1ZsYYVj2bNif3d9WLXTUjXfCjK+/am2iK5j1PaS92JnXdrDJhJLXarfxM+1V21QvLV1kkSa23ity+t3l2o6K4VvkXb92q11Z/u33zttb5vMrojT6oqNWXNyxOG8RLZxyfacNmRfvLXnPiK6htbgw2yMXb5kaSvSfE0CKyPCkgSFG2RyL8u7/erzPWrGaEn/Vum9tvzfNu/3q4sRGHKephfeOcnWa3uNkL7xu+eRf8A0Gum+G0iML5Yx8u9GB9c7v8ACuUure23TI9zMiKu6VVf/wBmrf8Ag87GG/jJyFaIqc5yCGr7nwXa/wCIm4JLtV/9NTPfyqP+0xl6/kZfiWbbrl7HK7H/AEhiMduazobwrMwhf52T+JN26ovGN3cL4nvoowNpu3ViW461jyakJpvO+bbGzKrL8qtX5lxPHmz/AB3/AF9qf+ls5qvu15erNuORI9QzvX5tzfLVyPWIfM2JJIzL8yfw/wC61chca48K/uXwyttT5vvUN4mgaHY8qpNs/h+bbXgxp8xh7Q7NtY2qJppv3rbt6/e+b+KrNj4iRnb9yymOL91Mz7V215/N4gFxGib/AN60Xz+X8u6mf8JFNDt+dn3fKnz7qJU5S0COK5NT0218STblT5UWPdvb+9/u1Ja6tNIzu9yu1vk3L8zbq81t/FkLKttM/wD9jWp/wk7283yJGw3bf3b/AHmrf2cuoU8RCUz0nT9Wha4EKOzpGm3+7tX+9VzT9YSS3k8l2Ks33d9eZ2/ix4ZXMG4rt3ff/wDHWrQ0vxM/meek23b8zK33ttZ806Z3UK0JTuekfbHmjVN//LL5lb+GrEkltfWfmQux3fd2/wB2uJsfE9t9ohd7zajL821tzNV+38WJbyLsfYnlfeb5W20qeI5XoejTj7xuXnzSI+zcv3fvVk6lNbSTR2LTK7fNt+Xbt/2t1Yt94geQM9lMq7n+Ztm6sW+8aeavyTN+7fa6/drKpU97midsY81K5ratrXmQtbIG+VPn3Rfe/wCBVlRa55wi8mZmTZtRW/hrB1TxVNc7kR1Z1T/V79u3c1ZU3ibbEUNzsRfmRv8Aarpw9Y8vFU+U9M8O6pbbYrZHUv8Ae/3q7DR9W+7C8yoGX5mX5vmryXwzr0LN8833f4f7tdrpuqboWRHX5m3V9nKn7vMfklPFTjI6231Sbz2SaaRfn/e+Yvy7f71aSTJcSRBPu/e2x/LurlrS83eZs8xl+6jTVrWt15kavM7Yjbcu37q1jKjGWx7mDzCrE342+0XT3PneaGi2su/7tTeWkjOiOu3725U/8dqto86Ru8z2ysv3X3fdZams45pLhb+Ha6L91furt/irzqlO1z6fD5lLlTKF9awy3Hzv/D8rfdrF1C1s5ISly7EN/E1buofvl37F279qN93bWXcKkcyzP8z/ADLt3V4mIjyyPYp4z91c43WtP2Mu92f+4uysebR1uFWbZsGza7L91q6y+jRpFs03D97ubdUH2G2TciPu3M3zL/FXn1JcoU63tjg9U0F5GaZ/3S/elZvmXdWLfaLtgZ9mG+7tWu+1O3mjjeF03KqfKrL95t33qxdW0ubzC8yKFhT/AFap93dR7T3Tow9OMp3OH1TR0t5Mum1fl+WqbaS5Zk2SJ+9+7t3V2OoaeJGXz02fw7f4lrOmsU3b33fN8yNRzS5OU+xy+nCMT07wTbfZ/g0tsw6afcjBP+1JXmmm6fM0e/ycsr7VVm2/NXqnhWHb8LVh8sD/AEKcbR9XrgdG0/zPkhfHz/Osj/dr948ZZcuQ8N/9gkP/AEmmejlKjz1v8X+Y3T7GaVk851cqu35vu1o6bbzRscOxDfKm77tWIdNMcEcMNtt/i3f/ABVWlsfOzYPM2N+1vL+9/wABr8EjU5TfGU/c5mSaWzyQqVRUDJt2yferRVXjs1R3VV3qz7m/h3feqvp+l7Wb/WMPuurLV6GFJDsRI2+7t3fd2/71dXtGfDZhLlG3Vim24mmnzt+baq1R8x1VHhh3+Z8m5V2/8Cati6bzGbZHJKrJtb/Zb+7WZfLM3zzOzKu1fLZtrbq7aM48tuU+JzD4uaJl3W+a8e2Ta5V/3W19rVn/ALmSR5vmDx/MjK3zSNWrJCjMkybWLPt27Pu/8Cqmtv5l0yJCyMz7VZv7taSlzQ908fl+0MZXt5vtk07R+XtX5V/1n+9UV5HbXUY3+ZFt+8rfdZq0ZrRGhXy9u/ft3bGakWxm8vZ8ruvzfu12+WtcNSTlqjro0zHa1RZkSF2H+z/Cv/Aas6LYPdagltNM0sXm7pd38S1alt4W3u/mJ8/3m+81P8A2r+MtW1+wsJlf+ybJnn2t91v7q/7Vd+W4f22J16Hl5xiPquG5Y/aPOfid44e81SfSrPaI7d2VV2feb/ZrgdLvB5k1s8y+Yz/dan+KLpLfxNf23zEtu+VvlZa5KPUraHWvs1zuUbN26vs4x9nG58DzTlPmZU8Xao9rM+98fPt3N/D/ALtY2oap/aWn79/zbdu5Xql481aO81BpERm3bvmrmrfUJrXd3T7v3vu1EZfZOj4jl/E8n9n+IpJId21vvL/tU2TUppoT2/2dlM8YNuvldI+W+Zv9mqlrcbY97vurWOxXMNuJMzP/AAlX2tVa4mhY7HT7tLcSOzM4f/Z+aqsr7lFL7Q4j5JnEe9Pu/wB6o5Wdfn/ipIW+Y8fL/dpxUbd79f71Ei/hFs5N0y1d0tHlmkjT+9urPs5Ns/P96r+jzeXeGZd33/m20v7opGpDHtkK9NvzVZjkfOUm27m+X+9UM0YwNnP+1Sx3XlxmBP4fv0pcsTP4hLyFJG3pu+X+L+JqpTyeaV/ib+7sq150zfPs+RU+838VQSKh3eT95qAM+4jT5nwuWqm0bj+PdWj5O5m39F/iqrNG+3eiUR900K6HaPu/8BoLbWb5P+A0/wDiaPf/ALtRSfe3ZzTjIBwERG807zHHyJwP7tRxkg5xkU5sKcZpAO3Sffcf8CoaTzDv3/71RMH6sKVW+UjtQBatI5bmeO1QBjO4RGJ7k4FfaXw1/wCCDX7a3xg8Ka94u+GsGjaxp3ha0F3r13Ym4ZLWP8YgZGxltiAttVmxtUkfGehyb9YskZP+XuP5v+BCv66/+CXf7HHxG8I/se+PrjV/Emgv/wALb8NhdBFjqBuFtAbe6hBneNSoOZlJVC5XDA4YFR9jklPhrD8OYzH5mlKpCpQhTi5Simpyl7T4Wm3GCcuyt12cz9q6sYx21v8Aofzy/s9f8EJv2tP2kPivp3wp+F3i3wndapfszkyXNzHDbxKMvNK/k/KijqcEnICgsQD+hf7M/wCyR8av+CK/xTfwJ+0uLLVRqNnHdWN94TuWuLa8iB2lo2nWJhhgVKsqsMZxggnvPEP7MP7Tf7Hn7Yfhr4R+AfHWlf8ACeXNzbHw9qXh7WU275/kVJBKFMeclWSVQHU8B1YZwP277b9pnSv2jdV8O/tZeNY9e8V6fBDE17a3EbWxtyu+IwpGiLEhDbtmxDliSoJOf3LBeGPBuYcUYaWAr05YKpQdRQ55+2k+ZJTjrbkV0nfW91ZvWPkV26tBxqJ3Tt5f8OfSdv8A8FYfgxDYx2Y+HnilNhydi2/P/kWuJ+In/BRb4a+Mdy6f4S8RQBgAWcQ54+khqP4Of8EWP2uPip4Mg8Z65deHvCSXkaS2en+ILuX7U8TKGV2SCOQRZBHyuQ4IIZRXh37TX7I/xy/ZI8WQ+FfjL4VFqt4JG0rVLSYTWmoIjbWaKQdxwSjBXUMpZRuGfUy3hPwXznNJZdgsTGpXjf3Y1m27b8vSVuvK3bqcs8FOFPmlFpGp4q/aF8J+I7meVdE1CNZHJXCoCM/Rq+BPjt+wZr/jH456p8TPhT4i0vTtM1ZxPcWWpNKJFuD99hsRhhvrX05SxxvLIsUalmYgKB3Ne/V8D/D6qrSoz/8ABkjTDV6mFmpU3qeS/Av/AII2ftwftRPIvwc8N2eswQyGG51JWkhsoZAqsUa4lVYw+GU7N27BBxzS/tC/8EF/2+P2d9NbxF8WvB9jZaSpUyavaztd2kW5gqiSWBXWIlmCgORkkAZr9f8A9uz4z+J/+Ce37Lnww/Zf/ZvvX8Malq2lNe6/qdowN2Nqp5pDkZDyzyOxcYKiIKu1eBm/8Er/ANrf4g/tQ+JfFH7In7UniGbxnoniLw3cS2j61JvnXaQs0PmDDsGRy4JOUMQKkZr+eqnh3ldbJ6nFeHwEHlsJS9x1av1iVKE+SVRO/s09HJRa2W70v9DLM8RKaoyn73orX7dz8LJf+CeHxPdht8ZeH9oOdpef/wCN1ufC7/gkj+0r8cPH+n/DT4V3+j6trWpSFLSxt5JRnAyzMzRhURQCWZiFUAkkV9g/FXwXL8OPif4j+H0ySK2h65d2BEzAt+5maPkgDJ+XrgfQVneGvE3iLwbr1p4p8Ja7d6ZqdhOs1lqFhcNFNBIOjo6kFSPUGv2qfgF4d4nL3VwVKXNKN4OVSbjdq8XJJptbXSadtmeV/aWK5/ef4HFP/wAGq/8AwVPcH/infCPK4P8AxVkHP61R8Tf8GzH/AAU9+F3ha98b694Q8Oz2GlwNcXi6br0dzMsajLMsUeXfA5woJx2r6Qj/AG7P21J5Vhh/ad8dO7sAiJ4hnJYnoAA1faP7b3xj+KP7Lf8AwTz8L/Ab4g/EjVtY+I3xEtWfxJeanqMk9xbWjYe4iDFjtUBktsdGBkPXNfkGaeDeLyXNsvwVeOHqTxVXkUYfWOZQiuapPWpZRhHffVrQ7YY/nhKSurLy+XQ/Gj4Jf8Elf2qf2iPEraD8G/D0HiG7twgumshMIbYPnaZpWQRxA7WwXYZ2nHSvUPGv/BtV/wAFQfDemXHiOf4f6LdW8C7ja6XrkV1OB/sxRku59lBPtX6jf8EqLnXvEn7AHxL8D/s2a1Zab8Uo9UmlS4nRQ/7yGMWzbnJGCI50RiAqvkkdWaz+xr8Kf+Cv2kftGaJqPxq8XeIIPCdnen/hIh4i8SQXtvcW+07kjjWVyztgBXUDaSCTjOfL4h4K4Vwmb5lTw/1fDwwTt7PEVqqrVrQUrwSlFWne0LKTel+hrTxeIcIXu79UlZH4K+Of2Bviz8PbTV5vEGsaZb3GhxTtfafOs8U8bwhvMiZXjBVwVIw2MEYOK+f7r5rjZ/ef/vqv2f8A+C0Ou/D7xJ+038Wbz4d+Q1vHpUtvqUtsuEkvo7PZcEfMQSJAVYgLllbgnLN+L16rSMmw4bbt+Vq+a8UOFMh4ew2U4rLKEqP1qj7ScJycnFvldtddL28+x0YKvVrc6m78rsSSSQy4REVf4qZHDBJcb+nyfP8AL/47UCyQ2+1Eh3t91/nq1YW9zeTLGkLbm+7X5LGMTv8AiNfwrYzX2qJbJtb/AGWf5q9Hg0dtNsW2Ju+ba23+Ks7wB4PvLOFdVv7ZovtCMq/J91f4trV0nibXrPRdFfVbny38uLbFG3y/NXkYqt+95YRuejhcPzayNT9nzwC/xB+IiabebZrPT7W41G/h27ttvbwtIzf+O18YeINRuPGni3UPEz8ve38ku1U+6u75V/75r9MP+CTXwr8T/EjxB4/1vwT4ek1XWm8IXVrYWqqzfvJvl2rWh/wW6/YD+HH7N/w6+BfjPw/8N9P8L+KtWt7yy8U2emuqrcLDGrLI0f8Ae3My7q9XKcdQw9aVGXxM9rH5VVnTw/s/tHxH+yP+zxqPxe+IFnYP91pfkVk3LurY/bk+J/hnVviI/wAHPhRZW9poHhVFtb+4s5dy6pfKv72T/dVvurXtvhLw/afs4fsSeKv2gNURYNVmiXSvDTRsySNdXHy7o/8AdXc1fDtmXkgyzMXZ90srdWb+Jv8Aer38u5sTUlWnsvhDi7D4fJcJRwcP4so80v0QCN45Nny7Vq1DCi/cfb/F8tJGqL8n3y3+zUjRvu2Rpt/v7vu17R+cS2FaTj+L/eqS3O4+Xt+9/Fv+7UO6Ers8n5Vb7y1csLczQ5RFpykKPPEkST7LNH5Ltu+9X0B+zV+1V4w+BPjTwx9p17b4P1SdrfxHbzLuW13femX+7tr5+aNFmVs7i3y1r+Ire5vvh5Klna+dLb3Cskkf3lVvvU+Xmiac0r+6fr/4Z1nwr4ys01P4e63b6xYXn+qutPuFkWRdu7d96rjOlvMl46Mo+7t/9mr8XPDvjXX/AIa6na674Y8SalZ6la/8eraffNH5Pzfwqrba+0fgR/wVM0Sz+FM2m/G/SvtXibS0/wBAmtU2/wBoRt/z0/uyLV060afxHXCUJH2/p8KTTfJIpMjbXb7rKu371b+k5b7+5Qz/ALpVT5mrxD9l39pXwB+0locuseG7mSw1G3+a60e8lVZ1/wBpf7y17ZY6gjTJNc+Yjr8iR7a1jW9p8J6NGMpQN2zi81pbmG23/L87bvu06SJ45tiIv7x/n8z5VjqGxkmhjf8AiWT5tzP8qr/EtTFopv3yPlVT5l27t1axkerh+bl0KWpWsJkKPuCfd3L83zVyniSzSHfvmVvn+T+9Xa6hCgs3+X5GTdt/irifE1y821Nnmqv3I2+X/gVctapLofU5a+aRg6aqfaGRIVZ2bd8qferkvGsXl6/dQmU8Kg3rxgeWvNdx4bt3a4MKW22Vk/h+Zf8AvquR8axMfG9xEF2s0sfB7Eqtfq3g075zj/8AsGqf+lQPpsPOLlJeTPx++NENxafHjxLaAfN/bEykt/vVB4q1aHT9Ft9EQbWj+dv96us/aY8OyaX+1H4qgvDwNRa4DL/EteZeINQ+338k+zf89fkkfgPwnF/71Nf3inL+9lO+iGNGb2pY7V5GxXTeG/Cd5qEyeTbb/wC8uyqjHmOWU4xIPD+g/aGX5flr0nwn4JRYVuZoVC/w/wC1Wn4H+Hr2savdIr7vm+Zfu1Z8UeKLbw/F9jR18yNdqsy/drb4fdMeaVSXKiLVprCxt/J8lV/hdq5TXdcj2l3uWO7ms3WvFlzfM3nfxP8AeV/vVjXl49xGOxrPmmXy+5oQ6lePJcvM53bv7tVGmIXZTppvm2eXz0qPy3ib95Ux934iveFEkZk+5xtpbNvm8j73yfPTWj3b9n+7VixjHmK+/bt/8eqhRl9ks26zM5T7q1tadI7Qqj7cR/3f4qorbzXEf7lNm3+L+9V2FXhjGxKCZe8WWt5pmZ0RlLfe21DIs0JPkp82/b8tamm/MuX+bb/e/iqxHo6TSLCkjAs+6l/dJ/wlPSdSns22IWxXO/FWXz7aGb/prXZ3Hhm5tY2eHcR/47XE/En5bZEmVi6t/wB81HL7xpCWpxtmSlyAf71ez/C3VHXR7iz87/WRbvlrxWP7w5zXqPwzvoYdKldH/wCWXyrV83LEqsc58Vr0TaosL7fl+/XKWse+4WtLxhfPeaxJv+Yq+3dVXSLd7ifYlMfwxOy+H+nvNcfOmNu1v92vVLfxZpvhuNYXudu377R/NXnmhwzaRpiuIVYqn3lrO1bULm6lZ9/8X3t1RL+6ZfEeo3nxQ02YN8m59m7buqBvihc3H/Hgiwp/d2V5jDHeTTD52+Vfuqta1qHsVZJH5VN1Eeb4iuX3eUl+IHiK5kvLS/uXb9zLvVY/4a9v8JeIn17wpa6lsWVvKVWZVrwrUoX1axkTZtCruf5a6T4C+OvsdnP4Yv5stC/7j/ZWnEnl9w+yv2OZHe38ReZtz51sfkGB0krxn4yxBfit4jYwHadYnLEt1+c167+xTefbLfxIxfcVktMnGO0teSfFBHvPjD4mijAcprVx8p/3zX7TxNHm8HclX/Typ/6VUOBXjXkcT4g1DUvDuoWnifR0aO5t3X9591q/Wn/gklrU3i/9sf4Va94luN82riSW8kkPLyTadOWJ9yzfrX5ReJrF9Q02aF/m2xbkVf7tfb3wJ+PGqfsx+E/BPx50dz9o8NWel3I5xlSsUbj8Vdh+NYeGKSyrO7f9A0v/AEmZ97wk+bBZh/16f5SP1N/bF/Z21X4w/Anx38GoL+W48Z6TfNFoytulurq3b7sca/8APHa3/jtfzMfG/wAE+LPgr8bNS+HvjLTZrO/0nVJLWaGZNvzK22v6pviX40uv2gPgt4b/AGxP2d/GE9nJr2jLpeuzaay+aqyfd+b/AJZsrfxf7Vfjn/wXK/4JreIfCWpeF/Gfh1LfUvF2rJJJqmh6fO11eLGu399Lt3NuZmr4fmpY7KOaUo80du/mj8jo8+BzbkjGXLL7vI+cv2Dtk3xC1G8yC7+Hzlh0/wBdF09qT9ou7Ft8e9UYEsRBbfIP+uKV6N+x7+xN+1R8CfBa/G340/B7VvD3h/Vov7N06+1S1MH2i4YiXaqNhsbI3OSAOK+z/wBnP/ggzYfttaVbftReOv2g7Tw9o+sTNDbaZaaY010jW7GAl2JCAExkjnoa+8zKrCj4F4WUnp9af5VD6SnRnWxbhBa2PyC+Lnh/7dpf9pQ7t8Ls+7bXB6hp7+IND3+SzfuvnVkr+mzwZ/wbbf8ABN3whpEt/wDER/F/ijam+X7RqXkR/wC1+7jWqOp/8EYf+CFc6p4Mvvgr/Z0906+VcR+IbiOTc33drM3/ALLX4U84wSlqz1qWW42rH93HY/mO+FmsTeHfFSQyrgM2Pmr6JhP9pQwukOVuIN22P5q/fn4Of8G7/wDwRTl1GbxZ4b+EGp66ltcTQSrqniOaWDdH95tq7a6HUPBX/BFb9kS7m8Mah+z54K0+e0kVbO0bTWvLiX+795mqK2a4Kjyzb0kdOHyXMsZzU4QcpR8j+e/w/wCC/FuoTJN4b8PahcPHLtRrGzkkZf8AgKrX3f8As96X8VPH3w5017z4e+JP7Rtbf7PKraDcbpmX+Lbtr9Y779uH9lr4K+EtG1lfhfoXhuXWIWk0nw9a6NCmoeXu2qzxov7v/gVc18Lv+CvPhXXfGWseGtf8JQwJYzqbeaGRctH/AMBrircQ5fGav+R7+X8J57Ti5wht5o+KfC/7OP7RviqHzNK+Bvii4RbfdK0mjSL5n+7Xf+Ff+Cfv7WPiSFUh+COrWisyr5l48ce1f+BNX3Ha/wDBUT4Jy2rTCKYvGjHyU4b/AL5rjfit/wAFk/g74B0K6ns9JuJ7rZ/o0ef4v9qpjn+W8t0/wNZZHxDKfJ7K3zR4FD/wSg/a9mj8xNC0NE27vLutcXzWb/gK7azfEH/BKb9shLNifBWj3Kf88bXXo9y/7X+01Ubj/g4D16bR45H0LTneKWRZWjuPmb5v7tcR47/4OFfiJLpV1b+HNHs7WVp/3V1v3PGv+0rVhLiOlKN4wZ6EeG84pytOcIlTWv8Agmt+3RNbtbJ8AL+UrKyxbb23b/gX3q4DxV/wS4/bvsmd5/2YNZnC/cks7iF//Hd1TaT/AMHB3xe0fxn/AGjc30dzA1nJb+U27/WN92SqviH/AILu/tAeKrZdHsdcl0rdKrNfW8i7v8tWE88jKPvUpHpUcgx8Ze7Whb5ngnxY/Z6/aE+EvmH4nfAfxho0Sy48+88PTeWrfxfMqsu2sT4Nzw3K6pLBdRyATopC/eTG75W96+vvAX/BbD496bMLfVvFlprFsqq0qX0aybl/iVt3y1zX7W/xp+Gf7QEvh74m+D/hvoeg61eQ3KeIp9EsFgF6wMZiaQJwzKGk56/Ng9K/T/BLGUK/iZgoqNpWq/8ApqZ9Fgcpx+FqRqycZQW7Utb27Hxd48vZI/FOowLKwBvpDk/7xrmLrWtkeYXx/Duatfx5Pb3HizVpba4Yj7fNGy7v4hIQ35EA/jXG61JtZXR1+X+Fmr4HiaF+I8Zp/wAvan/pbPCxk25ya7siuvEm3akMLN/Cn+1VaTxVbJu/c43fxLWHq15tkOxGXd96suaSaWNdiZSP/b21xQw8JRPna2InE6qPxY+0+TNtbdt3N8u6nN4wn2o7pGqfdRv4mrjbSWZ2L/N+7+Vfn/hqyrzLMnnfxN825K1jh4bHH9cqyOwtdcS5jffc7d3zff3Vbj8RPHJE6bnWNv4f4a46NraFv3PmO/8Ae2fdq8rTMrPv+9/C38VRUpyidFPEc0Tq4/FTyMyCbf8Axbd23a1WrDxVM22Hev8At/3v++q4/hY96J977m6pLe4fcYXfYdy/eauGpRnL3j28LiPh7noGl+Lrlplttit/d8v5ttaK+ILmaNUvE8z+6u75t1ee2s1yrGazT5t+1GV/lrVtdUufLbfNw3y7d+7/AIDXBKPLM+lw8jpr7XJVWZMyQt5W92X+GsnUtYmmxG958u35P9qmRzSWrND8yxtt2bvvL/e3VBqEf7sbIdv9xWX71KXKej7SMYlGS6htpPOd8bn+bbUH9pJIy/O2Ff8A1bfxU7UkTbvhmbd8rfN92qMjeTIsJRsbPn8v+Gt6MeaR4OMxHLzHXaHq0yyN53l4ZNz7f4t1dr4f1SaNVd3V/mX7r/NtrxrSdcms45PORj/stXa+Hdc3Wqs7shZPm/2f7tfcU5e6fj8j1vR9aE0gfylXy2+7I/zf7tbWj300zb0uWi85vu/e2steb6DrUCx+TD0bbvb7vzf3q7DQdVdS77Iy/m/d/vNRKUEdOHrS2kdtY3H2NUTezvH80si/8tP+A1ajvN0z3UIbzJnVdqv/ALP92sOLUppLPZt2yNuZ2/h+9VhpraNneH50XazV5tan9o9zC4qX2S3qV55bAOm4/d3L81QNcTXNwHmgjlC/61W+8rUyRnaMW0PDsm6JpKfG1zLCba5K/Ku5mX+9Xz2IVKR9JRrVeSJVWDzpBNDCv32V/nqNY87ntl/2fLb+9WmljM23emxVXdt+7uZqtLp/+jojou/71edWjCOqPVw8u5xWoaa8P3E3sqM3zbt22si+09Li55MgMiqz12mqWSQt/pO1X+4zf3axb6z2/OEmabb+93P/AA1lGXMerRl72pyN1Yuryu6eavyqnyfNVObT4YVbyVb/AGFrp7rT4Zd7w7o3/vN826svULFI0/vHerbttLm98+oweKOp8MRGP4bpEyuSLKUEN1PLVxmkw/vPnTK/88/4q7vTNp8DsEcsPskoDL1P3q4Kxknt2H2aFsfNu3N826v3fxoV8g4a/wCwOH/pFM9TKqsFOrfq/wDM3bWN47dUS22Oyt95ttSwh2mP7vZt/wCWiL8rf8Cqpp90ZoTvRtn3t38W6rthv8sI77Nz/PGzfK23+7X4PzcpOZYqPL7pbsYUk3lJmi3PufdVpY4Vj3Wz7V/gVU+7UCx7YHme4h2r/CqfxVYj85WZ7aFVVvlrWMpx94+IxmI9tLlBf3Hl/afvtudVqpcWe6P7Z/Gvyo38Natvbu0fFsrPHuWKTduamXFujWqO8MyBvmfzH+9/wGto1re8fM4inKpPYwbu32q6XKfJJ8yMtQR6akr/ACIzDYuxd/yrWncWLyLIdjJtZvmk+WrGm6K9vH9pdMrNt+7/AMtGWn9Yly+8cv1ecZGfDZ5V7aaZsbN+3+7/AHasNp7tiF0ZG/iZmrVXT/lXcixKz/xJ8u3/AHquJpMMjNC8yq2/dEv8LVwe0fPv7pvToy5rM5C80mGO3e5mO1dvzRs/3q4j4P8AjWHR/EnjuZ4WtlaeFd0O1lbcu1f91q6v4nao+k6hHpsKMrLEz/u3/u186eG/FD6b4o8SWcyTFr61ZvLjl/5aK3y19vklCpTw3tX9o+D4grxni/Zx+yVvilefZ/GVzC8ckXmSs3mSfeavPvFkj2N9FeQ+Ydzbf3lbXjzWvtlxb63skzt2StI+7c396uf1q4m1Kz+0vMpRkZtv97/Zr3IylI8L3TlPF2oTTaozptCsn3qzrySFbYzTbfl+4rfxUniK4VZN7p8+2ud1rVnkh8k7g397+9V/aKH+Il84iZ0wrf3axIpvJZofmrZgc3uijzDny2rMkj3Sb4PvUfCEfeIpP3f393+9TJB5kf3OP71SXCBl+5yv8NQTcMqb9w/urRI05eaRAx29ak2Oyq9RuN5yaVfu7PMpc0S+VCx7Nxy3SrWmSPHL9/738NU6ktWCzLu6UhSidJbSSeTs7L/FTZFeNm2fNu+9UdnM8kOxNtP3eThFTKf7VP3dzEb947M7W/vNUF0zxr8nB2U9piy4mk+X71MkV5FP75WWl8Og5EDL5ihEfbJtqG4DpDh91WrhflR4X+eqszO6N87FVo+If2dSvI2G+cq1RMoZ99Sts279nzVFMvaq+EuO42HO7bu2nNSbUZN9Mt13ueean2umUdFqhy3I8pko9NfZ/DUjR7V87fTRJkYC4NZklvQ5HOuWeHyPtcf/AKEK/qX/AOCSd7eL+yJ+0aq3coEHhjdABIf3Z+wX5yvoeB09K/mI+CHw08TfF/4p6P4D8JQK95d3itmR1VY40+eSQkkcKis2OpxgZJAr+iH/AIJf/tqfD39lvxV4m8EfG6PUJPBvjSwjt717OIyrazKSnmOgIbYY5JAxTL8LhW7fsXBeS5tmnh5nDwdCVR+0w0opLWbpVPaTjHvJRtp5pdTlq1IQxEOZ23/E8y/Ycurm9/bV+GF1eXEksr+OtNLySuWZj9oTqT1r7R8ZeCfDfjr/AILyWtl4muFWOws7TUbWFkQia4g0tJIl+cjGGAf5QzZToOWX5/8AHF3+wH+zj+1j8M/iV+zN8VvEniLQdI1221HxPHPYGQWqxTqwELyLCzsVByhU4AB3knaMz9rj9srQ9Y/4KETftY/s5akb2HS7mxk0q41TT3jiumgt0hfMZKyeU4VhzsfDHhTX7Dm+BzTi7P3i8BRq0YVsuxFKMqlOUHCpKpFRjJNe63a67x95HJCUKNLlk07ST07H2n+2frP/AATy+JfxmutN/aG/bE8aaJrXh5ltv+Ec0rULiC106QKCWREtGG9shjJuYngZwqgeMf8ABT/9rL9kn4sfsseGPg58KvixfeOvEGj6vBJbazqFrM1xFBHE8bvPO8cQd3DKCQrFipLAHDVq+M/jF/wSS/bumsvjF+0HrGs+A/GcdtFBrlvAJkN6URcZeKKaOZF5RZMRylQAwACgeK/8FAf2yv2f/ih4C8O/syfsp/C+y07wP4TmZ7bWL3TNt1LLkr/o7OzSJE4w7vJiWVtu4Dad3wnBHC1aGcZTQq4bHKphJXmqvs4Yei1FqThNU71YzltGMryTvKWmu9eqnCbTjZ9r3f8AkfJ9XPDupR6N4gsNYlEhW0vIpmEMmx8K4b5WwcHjg4OKp0V/VU4xnBxezPJPvb/gu3bya545+GXxNsHkfS9Z8JzJZvvymVlWXIGOpWdMnPIA9OeB/wCCJ/hzUda/bgs9WsxL5OkeG9Qubso2F2MiwANxyN0q8eoB7V3XwR/bd/ZH/aS/Zn0b9l3/AIKEf2pDeeHpQmieLrW3c7Io02Qu0kO6RZgjNGd0bI6orMSxrbuf2wf2A/2DPhV4m8M/sHXWq+I/G/iKzEUfia/tnkjtmBIRpHnSMYjDu6pHGVZlUPxyP5spy4ky3gKrwLHLa0sU1OhCoof7O6c5u1V1dklCWqa5rrZX09N+yliFiOZW3t1v2sfHv7ZXi7T/AB3+1f8AEXxZpTyNbXnjC/aBpJN5ZBMygg4HBA4HYYHOM15pXv3/AAT8+JH7Kfg/9oKfxZ+2j4d/tnSrmxmNpealYtf2sF6zAma5twrtPuXeAdr4ZgdpOGTjv2wfE3wB8YftDeIfEP7MvhiXSfB9xcKbC1eMxIz7R5kkUR5hiZ9zLGfug9EGEX9pynH1cFmkMgjhKqp0aMGq7S9lK1o8ile/NbW1r6O6Ss3xTipQ9pdXb26nq/8AwSV/Zph+O/7Tdv4z8UWit4Z8BRrrGqyTD9286k/ZomPu6mQ54KwsD1rgv2/P2lp/2qf2nNf+I1pdtJottL/Z3htCeFsYSQjAdvMYvKe4MmO1en+Bf2yPgL+z7/wTR1z4SfDHW72D4jeLr2ePxXPd2HlJa2jcSSrPynlfZ18tRu3h2dyqjBPxKvxk+ELkBPir4bOemNct/wD4uvmsno1MXxtjc9zVeyVP/Z8NGp7r5ItOpVSe6qTsoyX2Y22ZrN2oRpw1vq/0XyP0/wD2V7/wB/wT4/4Jvj9tXSPCdnrfjzxrM1lp1zc+YY4g08iRW7cqVjUQPK+zaZGAXdgIy8N+z7/wWr/aTg+L2n23xxOj634W1XUY4NRtbbSEgmsYXbaXgaPBbbkHbJv3BcZBO4c9+xh/wU1/Yn8Qfsy/8MS/toatBqPh4XZ/sXWdP1JJxBEZDKquIn86No5MlHjD5V9pUKp3eg29t/wQt/ZYuNM+O2r/ABm1rXRa3qvoVhq7z+Rd3cZDqsYe3gjldSAdrybP7wIr8jxv+rVHMM2p8S5ZVxmKr1ajpVYRVVOk9KMadRStScFo9murey64uo4w9lNRSSuttet11PBv+C4X7M3w/wD2cPihr0HwysYdP0jxT4KudVXSIGfbZzMJ45QgbIWNmTeqg4XcygKoUV+Is1vMq74du77rV+sn/BUj/gob4C/bQ8X+JviDYeLdNsdHtPDFxp/hrSbjWoJJlgEch3sqMR5sjsWKrnGVTLbQT+UckyTWju4+Rf8AvqvzDxhlmNPJshoZjVU8TChJVPeU2nzKyk03eSVk3d3aer3O/L+VzqOK0voU7PT3mkPz7G/j/wBqun8C+GbrVtUi022Te7Ovy/erC0eJJPn+7/F8v3q90/Z48MwtcjUprBnb7z7f4VX+LdX4TiJyp0pXPbw9P21WJT8Sa5b6Pp8Vgk0bvZp8/l/wrXk/j7xdc65Jt85hDG3yba6r49al/ZesXFjbTY85md12/dX+7XllxeJdRNt3Y+7t/irmwWFjpPc76uKlT/dn6ef8G/Pxavvh3458QajaWE00MGkfariTz9v+r+8qrTP2wtJ/aB/4KJftXTfFfx/4buJfC2jxNZaXpNnudLGz3f6zb97dI33q+e/+CP37QulfCL9qLSdP8Q3VnDp2oBrW8W++6yt/DX7R+HvFnwd/ZMste/aS+J3xK8JaL4L0pLjUPKSeMz3m1d0UMafxfN8tTSwl8zcXufreR43J6WSfW6qvUhH3f8j8Xf8AguDceHvhr45+H/7IXgPdHYeEfDMes65DG25f7Qul+Xd/tLGv/j1fDW/d8mzc392vU/2rv2mL/wDbA/af8fftIeIdPW2HjLxBNeWdqv8Ay72/3Yo/+ArtrzC4037O29/+AV+hYOjGhQjA/C8+zKpm+ZzxNSWrC3Z2X5+v8dTySf6xPl2L9yoY4/3ex3w396rG1/4NrfJt+aurlieSNXZuXYjfe+dmrY021eWFk2Lj+HbWNJN91Jkwu7/gNdj4P0lL5VQr8zfw0yJe6ZN5Yzww7/vvt/uVom4+x/DvVbn5d8dvub+Fq2te0V41/cpu/h+9WT4zP2X4S6mEh5by1bd/D81ZyKpnlEep/Z4mvZ5llmb7sbVd0+SZVa5cfeffuasKxtZrqUMseRW62+KFkz/wGg1+E7f4d+Ptb8J6tBrGg63cWN5ayq0Vxay7W3f/ABNfdn7MP/BU12mh8MftIaas8TMqReJLFfnVW+VfMj/2a/N+x1SaFldE2stdR4f8RTLCN/8Avbdm6plH+U1w+Iq09j90tB1vSvF3hu28YeDb+G/0q4+a3vLeVWVv9lv7rf7NSyTTR3O9zIiMm/cv8Nfkz+zX+1l8YP2edSe8+GfiFYra4+a8028XzbSb/aaP+Fq+pvhp/wAFWJrqaHTfip8K7X7NM/m3F9oNw0bbv91v4f4qX1iUdGj3cHmFCMfe0Z9htffavuQ/Lt/hbbWBqVj5ly+9F2fLsZpfmaofhz8X/AHxq0GLxF8NPE9vfpJ80Vm21ZYf95avSRvJCLZztk83c21Pl/3azrVos+owNRSipxkV9Nt92zybZY2b76r91q868cxovxPnijXj7XDgE9PlTivVNBtZvtSQfZpNy/Lub7teZePFeP4uyhhgi9t+q/7Kdq/X/Be39sY9L/oGqf8ApUD6fL6/tKko/wB1/ofmd/wUi0v/AIRv9qLxBd20OwX1lC33Nv3lr540rRrzU50jRGYv83ypX2p+3R8HfEnxs/a+m03R7Dzo7fSYV8uFN25v71dT8Gf+CZ+q6W0Oq+PYfscEn31+8yrX5VTgvtH4pm9aNPMJwXc+QvA/wR1vXJoXhs5m8xtrMqfdr2/wj8CbPwtYrea3/ooVW3s33t1fUXi7Sf2df2edGmRPJvJIYtqxyfI33fu/LXxh+0J+09N4o1Saw8PWy21uv/PP/wBBqpVI/ZPN9nOp6D/id8StN0WH+x9A2rt+Z5P4q8c17xJLqFyzu+//AHqx9W1q51SZnvJmZmb7rNSRq8j/AO03+392op+8b8vL7xN5010yuif8BpWh2wt3ZqmsbJI4w7uy/wC1U81qir02/N8jVRPxe8Zd1Dvfd977vzVJ85I3sodv4anmt4Vh2bF2/wDj1QvIki/+PPS+2VKMSNlO5v8Ae+8tWYV2zb3Vcf3lpkaom5U+633P4qtMx8pMIv8Ad/4FSXuy94Udje8Pyw3MCo/8P+xV6exTzNkJYLsX7tY/h9d1xsfcxb+61dPb2bpyibv7rK1HLGQ5PlM6xaSOTe7sqf3Wb71alncPHdfO7Mjfd/2agnsY2kV03SM33l/u0jW7rIH2Nt/h20fCTHmlA6/TptNmj2Pc7mX5nXZXlfxskha6RLbjc27bXVWupTWbbPOYGuF+Klx9ouYn3/71OPMVT+I5BPvCu88D332XQ5nd8FU/hrgq6jR5vsPh65ldP4dtEo8xrU2Od1Kd7q8kkk+9vre8G6bPNMjJ/wACZv4a5+CJ7ib/AHmr0Lwvpz2dj9p2fw/dojsKp8Jf1aVLa1CQvjctYyxwzN8/K0mtaptkaJPmLNurPt752Xe7/Lup/ZMeX7R0FvdQpCqJ/D8qN/FUsbSXUmdn/fVUrFXmVT5O2tyxtvs8fz/Lu/hWlGH2QlV5S7pOmpHbSuE/gavPJ9Wm8M+NHmhm2rv+Za9Ek1ISN9jS5UL/AHf4qwtH+BHxd+MXi6LQfhj8OtW1q+updsEOn2DSyTN/sqtVKIqcoyPpr9jj9obwj4HmvLDxhKba11ZI2S+VWdYXjD4VlVSSG3dexHvke2R/GH9lLVr+S8XUNCnuZmLyzNojF3Y9WLGLJPua6b9gz/g2G/4KA/GfTIdY+MOnQ+ANEuHV0k1yfbc+X/1xX5lr9Hvgl/wam/skeBraGf4nfGbxRr10sOydbHy7aNm/8eZq/TOHfFrOeHclp5WqFGrTptuPtIttczba0klu272vra9rGM8JzzumfmI3j/8AZhkh85xoLJ0DHRePp/qq9D8JeDR8UH07wZ4O8JHXF1ZY49M0iz08zfaFIBjVIQpyMAEDHGO2K/UyT/g2u/4J0NJbFIvFgSDbvj/tv/Wf+O/LXyx+wv4P0L4a/wDBV3RPAHhpHi0zQPG2s6fp6yuWZIIIbyJASepCqOe9fqPB/iZjc/y/Mq9TC0IfV6MqiUItKTSk7TvJ3jpsrdT7bhDCOng8wTe9Jr8JEHgz9gD/AIKeeE/CX/CKeBPhb4u0bRbhNz6Rp/iSG0gYEdGgW4UA+xXNPtv2Bf8Agp/4dvW16x+HXiuyuUT5ryDxZbxyBf8AeW5BxX6t/F39qv4b/CK3P9vazGsm/atfGn7U/wDwVv04eHLrRfh5f2s1wZZF3LL8zR7fu7f71fk1f6RuYUk1DL8K/wDuHL/5M8jA8JV8XZttL+vI+Ividpv7VWuasfhr8WPFXiHWLnT5g40nVPFP24QSYKhgpmdQcEjI7E1+nH/BOH4S6J8JP2ftD07xd8SYZ3RZZvsvmCNIHkkaRoypJzgsRnvjOBnFfj54i/a0m8J6hc/Ga5uYbwX11Ikscy/6THJu/irFs/8AgqT4ztbyO2sL+4jRnZkVW2sv+z/tV+ecb+MnEvHGVU8txOGo0qMJ8/LSi43lZpN80pbJva1763srfYYHg/AYWTlSqyUmrcztovKyR/R5B418HwKlomsW0ny9pFNc78TvC37O2seG5/EvxI0HQprSzj81ry6hQFQvo33q/Cr4S/8ABVHxnNcW1lrfiS4V5rqO3gj3MzNIzfw16/8AtOftvfEvwHotnpXjDUo5XhiW4TS7iJpFmbbujZl/2a/MqWb1KfuzpnYuEKcZc1Osz7y0f43fCLT/AAZe/B74ZWt14Z0zV3kS3ubOVnut0jfeVW+7ur83v2j/ANnj41/sMftTXfxd+MXiS38Z6P4gtW/4QjxBq1vtttNb+Lz4/wDn4VfurW5+xT+2xpXjjxY2sa3eMbi4ut3mMnzR/wC7/dr6p/aUvvg1+018DtX+AvjCdkttQ/fadqN7tlls7xfmjm/76/hrhp47nlKNZ/4fI+qw2AlgpxlhvhfxefzPz1174ueA9e1a88f+KvEk1zPqC/uLrULpnvL7/dX/AJZx/wCzXl9n8Rpv+FlQ6r4A84W0zsjMvyqy1698Cf8Agk74z0mbUfiB+118XdPs9Nsb2RLVtLl8+W8j3bo/L/hjXbUn7R3jz4LfDmzTQfgD8E76+TR4Ge41S8ibc3+03y1206PNFa83MdNbMqVGteH2e5Mmm/FTS5X1vxJqSwwMi+RC3ysyt/EzV86/tGfEzXrdryCz1hXdXZd0b7mVa9W1LxN4w+K2i2sPijxzefYJrJXSz01Vj2qy/L81ZGj/AAA+C0dxFc3+iXl+6/LE2qXrPub/AGlX71d8MjxMve0R8niOJI+1l7OVz4lvPiN4q+2LDC7YklZf3KMzSf8AfP8AFWjbt8TtcUPpvgzXLtZH+9b6XM3zf981+gPhXwj4A8Jag03hvwHoth5nzOtvYRqv+y3zV00etXMby+TqrRLt/wBXb/Km3+KvYpZXhqceWR5VbHY7Ee85H5wN8Ef2h9S8nUtK+D/iS88yX7sdlt2r/wACp/iL4S/tUaPH51/8EPFEUUe3fItluVW/h+61fo7NeXlzcD55pXjT+/taobi+vDCUS5uFXr5fm7f/AB6r+p4WJnGtjPszPy+vrj496PeJDeeFPEln/wBM/wCzZG+bd/u19Vfsp+J/GviPwLcR+MtKu7VrW6CW32yDY0i7eWx+Ar3bXPtLrNeQXLYb/W/PuZv+BVyFpuN7cyMWILLhn6nrzX6V4NYShDxMwVSO6VX/ANNTPpMhxWNjifZVJ8ylf8Fc8H8f6Vb6X4p1ee3yTJqcszMDkeYzN8v5EVxGpYM/z+Xhm/hr0b4uW0za3qDEzAG6bH93Ga87urWaaHyfJ+b+Dd/DX53xJH/jIsU/+ntT/wBLZz4uUnOXq/zMC+s3mco7sy7/AJ/k+as24s9rGzTzPm/h/irrxpe5lfYqj/po1TLoO1mSHan8btt3K3+zXBTqR2PnMRTlI5X+x08svv2bdv3qaunXMbG5mm3pv3J/FXeWPhl5YXmmtm2bN3yp92kbwjcrIf3Oz+L5l+9WntoRkc31WUoKSOMsrF0jhd3bLfNuVf8A0Kr9vo811MEhdtypu3bN22tubQEb5NjKGWpF059yO/y7vllVflpVKkJS94ujRnExV09/7/8AHtfzPu/8Bp/2F23zTJsRf4mSuh+x+X5UL2zbG+R2ZPu1Jb6Hc3DFPup91q4KlaEo8qPawuFn8Rg2envb7Psybov+ee/7v+7WlYwQsQwTD/Mvlr97/gVXLfQ4ZIfMdGX+H+6y/wC7RHbvbs88Ls6L8vlt8rNXBI+jwdOUR9vCW3zOjDbtZ2kf7tOuIXW1cuNw/jX+7Vux01JpvJ2b/LX51b+Kn3Gn+dZiHY0Qb5vlqeX7J7NGnzR0OaurF2mKImxFi+9J826siaz/AHgld5Ei/iWN/mautbSXaPZM6n+Gs/8Asl51dHeMBVbbXRRlA8PGYOXPzM4C11IzXDed8pb5k/urW5o+seYyo9+wH8Fcku9pN7vmTf8AJtT71La6k8fz71xX2EJfyn5BKPL8R6xpuvcFPOVlZF3+Y+3ctdz4f8Q2ybZkmZo2b5WWvDNC1nYyeT8/95pH+9/s13Gh+KnXc/n4ST76q/3WqK2Il8I6cep7HpmvJdSK+y4cs+3y4327f9qt/T7xNrJcozOzfw/xV5Z4f1y2lX/XNlX2/K1dZo+tM0eyG5YOrr5sleTiMRPWCPcwtP4ZHb2mzkzQs5mX+Fv9Wq1fhazaNd75ZnVU/i3Vzel6k74hS/8A3bff2/xV0ujzukZd3X5v4V/hrw8RufUYXXc1Ft0aGO2eTe7ff8xflWrs32beuEZF/hbZ/wCg1UgkEcYdH2/N8zbPvUv9oeYuxH8xl+Xatcso80PdPToylza/CZWpx2crN9mTj+Ld97/gVc3eW9nawsiTTZV/4vmZv/sa6HUrzyYVm3xn+KX/AL6rB1a8hVXmmlVmkl2p8v8AF/CtEf7x206kYGVdM8OLnzl3Mnz7vlZV/wBqszUJJ5rX5J98X92tS8+xpvmT55pPlf5t3/Aa56+kmkjdESRdv/LNaz66HqUcV7OZ2ukBIvARCsSq2koy3turgIJJmtTcwOvzP8m77u2u+0qRH+H7OCxX7HNyep+9XmU0bvtRH3fP97f92v3rxnhKeQ8Npf8AQJD/ANJpnVPMZYRp9zoLFprGFn+3rs8pWZtm1a1rWOG4zJvyyv8ALtf7q/3q5/TZvtMiQv8AMipt2tW5Z/uLlLx32wr/AAtX4DKM+blOCtmntomlYyPCG3jeqv8AIv3VZa0VsUmZ/nZWkT5P97/dqlZzQ3C+dC+NqbmVl/8AHau2sc0g2O6yLIny7k+Vf/sqXN7usjy5VOaRPb27x7NjruX+L+H/AIFSHT0m2wwpJhW2qrP8q/8AfVXrDTLm3gRNi/K3977y1qw2dtcRibZHvZP4v4a56dYytzfZMRtI+1Mr+TIFb7zb/wDx2thtLtmjj+zI2xflT5PutWla6L5bRvCilWfdtWtKGzkuLcW03yfP/q2f/wBmqeaMmk5Fxo+5zSObXTZvsYWZ/MG7ay7PvU29s4dNs2d9sSKrPLN975dtdCump88MKK6N9xWf7teeftReLD4F+Hd48Lq8twqwRRr/AHm/+xruoQlWxEYHNi5Rw+FlUfRHkln4k/4Trx7rGpbFW3tbVktfOuNy7dv3q+dfGmoTaB48a5SZQs0zI7Rvt+Wux8D+NE0PWNVsIEWJLi3VZZF+Zo683+L0iXX+nwo2/czK1fpdGn7OjGkfj1WpPEV5TcjM1jVJLy4vNGm+XvAv8O2sHS9chjmbTbybake7ZVG41aa8VLxOXX5XXd/drnteuJluH1KB8Kz7tu+tRR/lL/i6NzcS3ML7g38NcfdTPdKUf5TH9yt268Rf2lpOxNu9fuVzl1Huk3pu2f7VHvyHEv6PdJGrQ3L5Rk+6v8NVJLhIZsmZvl/hqKNvs7B9/wAtMnBlcuE20FlopDcfvkf5f7tVriNFZvKTaGqOKV4n21Z+1QyITs5quYPhKW35s05PvClk+VmSm1RXxCP901ImSy1G/wB008fIyf3anlCRr6e0a437l/vMtWZFh+dN7f738NVdNb5dm/duq1cyiSEp0VU/hrOUp/CZ+5zkEkkbbtn3qj85Gbp/wH+9SPOnl/u3yf8AZpi7Np+fbVFD92z7gxUVxGjSNIU/3/npzbNuzp/tU/anlsjv/wAC/vUE/aKkzfvOOPk/76qu/wB01Zmjzl/u7aqfwfjTj7pcYj7VtswOauTWs0kn3/vVTsXzcL8ma6RYEmtg+za+3alVGMxS5UYFwkiybJui1C0bL9zpWtdWqeWibMP/ABLVDy3iIx12/PUC5j27/gnAhH7W3h8t1+yX3/pLLXr3/BS34y/Fj4b/ABZ0LSvh/wDEbWNGtpvDommt9Ov3iR38+VdxCnk4AGfavI/+CcygftbeHc9fsl9/6SS12v8AwVjx/wALr8OFv+hWX/0pmr9zyfE4nBeCWLqUJuEvrS1i2nqqXVanFNqWNV+xyHwH/aF/aE8V+MV0/VfjJ4iuIlhZmSXVpSCdvpmvY7/4rfGmwjW5HjnVJUQZfF6/6814H+yppqXmvX135O6OG1Xd/e+Zq+gVs4W2xp92RG2K38VfiWN4mz6ElbGVf/Bk/wDM48Xyqpoj7g/4J8+LvCfxP8G2R8ceH4NSvA5jke5t1keRgvQ5HWvtfw98CvgvqGnxNc/CnQmnfh0TTo+P0r8q/wBiv4np8M/HEWgvNNFb3E+9I/u/N/F81fpz4b+PHw38G/De58VeP/GWn6Pp1nBuuta1KXbFbr/Erf3m/wBmvWwHFedTw1p4qpdf9PJf5nl1FUlU5YFzxx8B/g7pMLsPhxosA2ZVVsEDH9K+U/2v/jt+yr+yjo6X3xNk0iwvJ4WMGg29sr30hH3Ssajcqt/eavCv21v+C6Wr+Mrq/wDhj+xtYf2fZSRNa3XxC1aBvtd0v3Wayhb/AFa/7TfNX5V+O/FPibxX4uvdf8X+I7zV9Qmnbz7/AFG4aWWX/eZ6ipxNn1aVli6v/gyX+Z6uCy+75qjPrXx//wAFNdc+IurzHwjp0fhjSYnUWtvCA1zIP7zyDp/u1na/+0n428W6BHeWnxV1fTNQj5R7HVJFikX/AG0zw1fIO98ZD45qwup38YCJdvt/368+pmXEPtLxx1X/AMGT/wAz1FhoxleKPoXT/wBoD9pnWIT/AGD448VXmDhpIb2Zv61U1D47ftgC4a1tfE/jHOcKVmmb+teLab8RPGujqE0rxNdWwX7vlS7avD41fFvem34haplfu/6W3y1pDNs/hvjKv/gyf+Ztyp/ZX3H6PfCm58Z+KP2LTN45vLy41m88Makt1LfMTMzEzqu4nvt2j6Yr4+8KfB+2haKF7m1kmZv9THPG0i/7TKtfVXwJ1DX/ABH/AME+0vtTvZ7rULnwhqwM0jkyO2bkLz69BXxj8JfBOq+BfElt4qv3k+0w/N5e77395Wr9W8YfaV8myCc5Xk8LFtvVtuMLtvuzz6FRU/aWetz7S/Yv/Zfv/Fvi6yeHSvtFusvzbW+Zm/2a2P8AgsdqFtdftDeGP2afDvmNpfwt8Mq10u7cralefvG3f7Sx7Vr7X/4JY6H8Pbr4Tv8AtCaqkNto+j6XNf6lJt+WFbeNpJPm/wCA1+cnijXtT+NHxC8U/HLxI7Pf+MvENxq0rSfeWORv3Uf/AAGPbX4rTj7OhdnHTqPnlVkeN3ngWa+0/fCjKY9uxq4vUvPtbiazmdkVX2vu/ir6D1DSYVXYHZEX5UjrkfFXwoTxpH5EP7u5bau5fu7f71clbBxxf+I9LD42cPi+E4Dw7dQ2tv52yRP4fubq+uP2Q/Deg+JtBks33STSKrL8m3d/s18neNvh54q+Gd5BZ+IYG8u4T9xIv3GX/wCKr2z9iX4tJofxJ02zvJo5LJZW82OT5dvy/wDoNfF59g8RTpuB9TlGKoVKsXL4TU/ai/ZN8aeIvGH9o/D3Qbi+Zkbda26Mzf8AAa5T4M/8E5f2iviZ4nt7b/hANS03TWlX7RqWoReUsa/xMu771fob4V1azj0C38VaVcRm+a4ZZfsqfL97cvlt/u1u+LP2irDQ47zXviR4wkt9I03Tftk8zRfu4VVfur/tNXJgs1n7ONOEfePpa2V5fOXtec+Bf+Cxnhv4afsxeK/hf+zZ8DfDFnpl54b8KLq/iDWIVX7TdXlx8v7xv+A7q+M/iF8Y/in8ULK203x38QdU1WztW3W9pcXTNFH/ALq16B+1H8adb/ae+OPiT4161JIF1S4WLS4bj/WQ2cfyxL/3z83/AAKvJ5rU28hfZuTb8lfo+Gw0XShOovePhsRjKsas6dGTUH0Es7jawRH4/wB2r7SPJGA7b3/g21mQq8M2/d8rP86tVy3uETMz/Kn/ACy2128vunnSkS28myb98i71/i30s10NrP5NUdUZ4ZEvPlZPuvt/hqBbnaQjzMf760uYZr2snmSbH3K/91q9l+Degp/Zb6rcpt+Vdn+1Ximh3KXEyJMfuv8Adr3v4e+Rb+FxMJtz/wB5qfLzGcpFLxhZpDdvsRpUXdvjVvmriPi8ws/hvJZ/KryXC/Ktd74mk8yMvt2p/e/2q80+Nl0kfh6KL5t32hV3N91v71Eub7IoL3zgLKKHT7Vf3eX27qZNdJcfP/C3+1UdxIjRqibm3Lu/3aqx3AZv92o983j8RbhkRlZ9m0fx1qWN1ux5U3y/e/3aw47j+NHbG+r0Nwn2dE3baA97nOw0HXLm3uAEmZVb5dtdz4f1yFdsaRqTv2srfNXk+m3STTbAjBdv+sb7q1q/8JhDplwn2BGeRf8Al43fLuqvdKPZ9P8AFlz8P9Qj8Q23iG60qeGXzYri1naOT/gKr96uv1T/AIKkftSyaOmg+HvG1udq+V/al1YK9zt+7Xy42sXOpahLf6lfyS3DN/rJHrc8O2v22ZX+81R7GlKV2VRxOIofBKx6Bq37Q/7Q/iaZtS1740+JJZW/5537RLu/3Vr7L+BHxF8SW/7PmlfE3xHdTazqNjp095K17MS1yYZJCqMx5wQgXJ7V8H6tdWtisNtBcqWk++q19qfB9Fh/Y6jWZyqjw5qG44GVGZ8/lX6/4NU4wzbHJf8AQNU/9KgfacH4qtWxtdyk3+7lv6xOQuP2zvDFn8ZJPip4b8NzRLeRRxPZ3EXzW7fxf71dH8WP+Cgm3QWtbDclxNE29tnyt8vytXytJ4i0qzXZpqb9vG5vvf71UL64sNcVvt9t5is+394+2vyH2cYnwlaXtqvPLWRzPxi+PHiHx5qjzXl9JJ5m7f8AvflrzS5vri+m86R2J/hr2K8+EvgnWbX5JpLQqm3dH81YF18C9Y0+YPYOt7C3+qWNNrVUY+8HwwOGsdNubhRv+b5vvVtaf4f8yRcv92u20f4SaqrLbJpUxO/7qr91q1tN+EevPcNbx2DBv71b+zI9p/McTFpsNra/Ii4V6z9UmRV+R1WvTrj4FeP75fLsNKZg393+9WQ37NPxguZFR/BkjIzfPN5qrtX+9S5BRrRkedXMe1TvfLN/eqFVTn/vnbXsln+yD4tkk/4mviTSbBNqv5lxeq23/eq237N/wx0dvtPiH4tQv95mjsbfd93/AGqy5YfCXzfaR4psc/3dq/LV2zt3WP54WU/7Ve1aX8KfgCyqltealfTNKrRL5qqrR/xfL/er1P4f/sm+HvHV8mm+DPgteTNcS7Eur64ZlX5fmZv4VX/eq40+Y55Yjl3PlLSLe5hbf5GTv+9XW2du81uj/edl/hb71ffXh39mf9mb4Q6PPbeLfhjpvibxJ9n8q1jVma0s22/eb+81YWg/s2/DTVNY+2ar4YV3ZVaXTbOLYka/7P8As1XLTM/b1f5T4l+yvaxrv3Dc1MjiRbrY8O4/d3fw1+iUP7PPwKtbo2z/AAl02K3hZW3KjeY3y/MrV5t8WvgV8H/Mlu/CvgOFIlbbLIr0/Zlyrcvu8p8V6hYoreckLNt/u15t45mM15sHRa+7dD/Zl03XN7p4VWNPmZZvmVWrTu/2KfgtY2Ym13wxb3N20W54YWb5qXLHlCFbll8J+dWk2JurgJiui8QWM9loax7P9lttfeOk/sE/CvVNUhmTwfDZwSL/AM92Rfl/2q67w7+xP8AdJ86HUvAcepvv3RW9xKzL93/x6nCMf5gljJSlpE/NDw1pH2i6R50wiv8AN/s139xZXjWYs9MtriZ1X5Vt4mbdX6KWXwf+FHhqFE0H4N+H7OX5lVZLJZG/3vmrpPDPwjub6H7Xc6bp9nDbory+XbwxxW6/xMzKv3aUuWOpP1iVSZ+V0fwp+KniC8CaV8OteuVk+55OlyNu/wDHa+ov2Vv+CFf/AAUc/an0yPX/AIf/AACvrLTJuftmq3C26/8Aj1fof/wSY+Cz/wDBRb9py/8AD2l+cnwt8Cyq+rXkabV1KRW/1at/dZlr97vC3hHw94K8P23hnwtpMFlY2cQjtbWBNqRr6CuiNShQjdwvITWJxWkHaPc/nY+EH/Bod+2jqzw3fxL+LvhnRIpP9bHHK0zxr/wGvp/4ff8ABoF8GbfT4/8AhYf7S+sveNFtnfS9OVl/4D5lfs1swPljH4GuR+HPi9/G8Op+I4Jt1m2qTWthhfl8uFtrNu/2m3Vnic2nTpuUYRj6L/O4U8opuXNUnKXz/wArH5zfB3/g1P8A2Dvhx4ng13xx468UeKoIJAyafcNHbLJ/10ZPmavvX4Ffsn/sw/sv6RHpHwK+Cvh7w3DCm0XFjYL5zfWVvm/8er0jc3c1ka1bzXnyIjbPvNXxONzrEyd4HuYfC0o+6WrrxVZKjGGZWEf3m3VxGv8Axshs5pIIbmNpFbair/eri/j78QrfwLobusjIkcTO23+HbXyav7V3/CG/b/GetnfbNKrQW7JuaT+LatfPVsdmGIu3I+nweWUILmlHmPtPWPjVcaP4fXWtV1FbTzpFiiVm5aT/AGf71fkV8L/iI/w8/wCCiF58Rb66jZrLxrrU0srnarlvtQP0BLfrXtmm/tbeAPj94ulv/i1qt94ZttPv1ntfMRl/4DHXy7d3/hu0/ae1zUb7Fxpa+ItUfLHIkj3T7Sf0NfvHgxUqzyHiNT/6BJ/+k1D6zJ8NTo0a6jFK8X+TLn7fX7bt54k8VXdsl5NbPay/PCu7arN93/8Aar4q8YfFabWGW8m1Jre9mf8Ail+VvlrR/bi8babq3jee5s9RZ0kddkkdxuZVX7q7v9mvmjVvGk0l0yJc5C/d3V+M08LSlC6PJWIqUpcszsPG3jrWPFXljWLyQXML+Vu+6rL/ALX96uKuPEGvWEjQxw+dubbEyv8AMrUxfEH2hvJd1DyP8rSV9mfsd/8ABHzxd+0P+z4f2tviz8aNB+GHw4S5YWviTxLbtLPfhflb7NAv3lVvl3NW0MLSStI9KWMoRjF31Pnbw74R+Iug6LZ/EL+29N0prN1uLCS4v1Z/l+b5o619H/aY1X4xeJtXPj/xlcX+q3Uu9Fkl3Ky/d2r/AHa+mr79i/8A4I1+HrBf+E2/bk+InjL7KzLOug6dDaW03+7u3Mq1xnj74I/8EmvDscWt/BaHxRDeKrfZb661xpG8z+FmVa5JQy2Xxz947q1XHxpRUIWj5nI/Cfxd4q8I+KUfw9DIf4W8lNv3q/RD9iHXtNsdcitvjxpv9sahMm+10u8bbHa7vuSN/e+X+GvyQ1T4gal8NfGe+bW5r+2Vma1uN33l3fLur6r+Ff7cXhXxVr2meMUmaz1lbCO11L7ROqpIsa/Ky15mKwtOPvRReFzD937Pn/xH7YfDWz0nwt4rstW/4QzSr/QZv3U9g8XmNbq3/LRd33q1f2k/2RfAPxH00/EP4f2dr9ssoma40m9TbBeQsv7yP5f9mvkH9kP/AIKC/Ca/8PC78R+KYb4WaM0sfn7YlVfvbmb+Kpf2af8Agof4hvv2ltV8H+Jri9vfCeu6jI2mwPLtW3t9vyrH/erLC46UI8jiRmWUyrVVVpz+z9/kfAOuX2ifCX4i3nwZ1vWI47631SZ9Gs9nl7rVpG2qv97b92um0u8t1VIf4tzMjM38VeWf8HFfh/w5Z/t+WNt8Lbq609v+EZtdRtVtfla3aSRv/iab+zn4i8bap8MtMvPHepefcqyq8yrtZl/vNX6LhZVqmDjKfU/Mak6dLGTproz2qLU5+P8ASVk8xP3qrF92ry3k1qoPksHk+V137VWuVs9W+zzboSu3Zu8tU+8v97/ZrX026uZLrfvaRG2ruX+Fv9qrlHl1O+nW+wdXp+9o2h+0szfL93+L/Zp+5JJAknnRJJuZFb7y7W/iqhpa3ir5T7Y1jbc/8Tbf/iq2Psr3G3fPvX725krlqS5Tvp1PsmNrGmw3EMyb+G/iWuRurKSzuXDmT5mPDnvntXeTWv2WN9m3Kt8ism1V3fxNXL+LorWK9C2YITc2cSblzx92v0rwYd/EXB+lT/01M9vI3J5lTv5/kzxr4i6Ib7U7uEkoHLEqDgcn71cJceHUtWebfkM33W/hr3TxV4VN7a+a0bASKHJ/2d1ef+JvCqNM3+hqkf8AeZ6/L+J6kpcQ4yP/AE9qf+ls1q/xpX7v8zgE0lGV32fOr/M3/stWbXT7mE+ds3rtXcu//wBBrebQUMizTJ86ru+X+Jakj0Gbzt/k/Lt3ba+ejU5dDhqR5veQ3SdJhuFebyNrtt2fP96rS+H/AC1WZoVmC/dZX+9WvoOhpayOk3ludu5V/u1uaf4TMcRhm01Sjfw7tu3+LdSlV5ocxtTpy/lPOrzw/wCTF5zo22RvuqvzLVJtBuZJNj/M+z7zN95a9R1Dwj8yySIzBdzfN91qzpPCaNIkiIxH3dqp93+9TjWnL3WRKjLnsonCLodyrjy+qv8AxVdXTUt2CTQ5RV27o/mbdXSyeHYYwiP8zMu3b/E1WbPw7IFWb7S25V+dmSsZSh8Uj0sNTlzcpyseizSQtCiMq7/+Wi/d3VlXWl2cbO7/ACqv8Lfe213WqaXeMuya5XYvypI38Vc7q1vctJNtmjKqq72/2qzp1OY9yjHlloYJXy408v8Ah+ZP722pGuJo5tn2WRxs3fL96mX023Z/Ei/M7L/eqH7Z5x+020i/L9xd3zba1jKR69GnGQjTf6OEKSB/vbZP4Vpk1mkK/wDLNmb50/2qYs1tNCNiZWNNqbqTzIfOyj/dXav8TNWtP4jjx1PqeXarYPY3Don8Kfe2bWrFmkdt8aDB/wCedepeJvCvmKs+xV/i+X71cdrPhSazk85Nv7z/AGa+kp4jofi+Iw0o6nPaXcTWbb4UY/Jt2/71dZouoXTRh9+7au3aqf8AfVZEemzRMu/aGZa29JsZo5UtYUx91mb7v+9RUrHNRpcsveOt8PyQxqtzM7fN8u1W+7XbaTqWJPkdn3J97+KuA0uxeGNnjfzv4krq9Nvfs0Pnb8PH99VrzqnvS5uY9nCx9n7x3ei301nt3orf32rr9C1hLhV/1aLs/i+WvLrHUoZI0S28xTvVvmetqz16Xar3Lw7N+1t3yyM38NcVSjKUz1KOI5T0tdWtpoW8lJBHu+VlTau6o7rVEWb55tiN9xl/vLXJaX4gmaN3d22fdRo/mXdUOra69vdb/tPzfwNG/wAv+7trGOHn3O6OK5o+8dBq19Gsn75+W+VG+9urIvrx5DseZif7sf3d1Y114mc5+07W/hRf4qo/29bTb5EdnKv8m37q1UqMuX3zT65SjLQ0by++aWGb7yt87fd2rWRdXkMz537Sy/eZ/wCKoNS8QW0K7/Ok+b5fLb/0Ksu8vpmb7iu2/d83y0/qvuxKlmUUeq6C0k/w43eblmspsOQP9rmvMVjdmEMKLj5VlX+7XpPhlwPhaJC5IFhOST1/jrzyx3tKPkV0/ut8tfuPjGpLIuHEl/zCQ/8ASaZ3ZpiEqVCT6xT/ACNXS1+zqET5nZvmZvm+X+Gt2xsz5becjCON8o2/duasfS3RYfM+0qkv/PNvvNWrDLCsyQu7O0L/ADf3dzV/Pcqkuc82GK5ocpsaT+8keHpJHtZ/O+626tuzCXClPJZJWT+F/lWubtbya3VU8jO5tyVehuJPJ/4+WZ1b/drmrU/3vOduH5pSlI6G1uob6PZ50Z3ffVvvLtrWiurZdttNbbH3/wAXy/w1yEN+8kkWy227f4fu/NWtZ6s65TyVfb8qbn+7XFKnKPvROyn7szrLW4hk2wj5Ek/hZvu/7VasLW0zb4PnSNNv95q4iHVkhZnM+f73ybm/75rVtdVdXR4V4Xav/AacYx57m3N/MdPH8reS8ypGu7bJInzV8n/t6ePEvPE2m+A0dcWe28umVPm3fw19G6n4kTTrW5uby+VGWJnRvK+VdtfBHxa8YXnjDxpqnieaZm+2XTfe/hVflVf92vqeHsL7TF+1l9k+T4rx31fAxpR+2clpmvFfE1xamZYkuLdk3NWD4uuHkhe2fkxqqvVbxRffYNUS8875f9ml1TVIdQt/tj/P5y/Mtfe8v2j82+E88m1AafcPDcrwrttVflpl3B/aFr5Py7WX7y1L4s06PdK6bUXf8n+1WNp946/upvl2/KlPlQSlMz7q3urHd2RmpkkjzbpFdvmrW1S3+1Wp2P8AN975awnieBz6Uy4/CEgKBlxTJJE28VMpWQh/mP8AvVHPCit/8TSlIqPmR7fMzv8AvUwllb56e33zs+7Ss26P56UTQbTWV2bpTqKctgCpGj2hNn/fVR1LJJuVS6YK0yJblzT1/ds+/dt/hq55iLjZDlf4kqlZyJ5Owp81WtrrIQj/AHan4jIim+Vm/wDHaZJIm3Y7sp/u0sjOzb6Yzbmx/F/eqTQfHJwqJ/6DToIYWVqjSR4+j/dqTzn8obP+BVfoZy+KxHcbVjLtxWezbqs3zlhhvl/2aqnk5NL4jWmPgO2ZCP71dhb28clur7MfLXGhtrq5/hrs9JndrON0m3bk+61UTWKl1b7lyn/fVZslt97ZBuNdFcwusfmPDtrLuFfcdibaDH4fiPXP+CdUZj/aw0BXAP8Ao19tI/69Za7H/gq+qn40eHGIJx4YHA/6+Zq5X/gnnE6/tX+H3f8A59L7/wBJZa7L/gqmm/40eHe3/FMD5v8At4mr9lwH/Ji8X/2FL8qRg/8AfI+n+Zy37H+jvJoesar9mXYssaRSN97+9X0P4J03R7q087yfPuPvJ/D5deYfsg+A7aT4Nw6lczTRNqGqSbWjib94qr/er2XS9JttHX7NDYSSt5W7dJ/6Dur8FxFGUqtzgrc0q7scb401a50PxMr2G2B4/nRlb7tRftBfHzxz8btH0rwl4k1DZomiwK0Wkx/6uaZfvTSf3mqb4jaK8MKarqVmyNcM33lrz/Wr5I0SGzTG77y1hToe7bmLpxieeeMYbOC1mv0tlTy03LtTbXhV3I01y8rvuLOx3ete0/FRrm18Pzb5vmk++u+vFXh8v79ejh48sD1MPyqmMeNVUU5Y3kpT3/2fWpbeGRmDhcf+zVudHMyHyXLKnZq9E+DfwdvPHN8LmaBvs0LfOzL97/ZrO+Gvw51Lx54mttEs7OZ1kl3SyRr8qx/xNX2T8Jfgrf8AiDULb4dfDfT22RyxxXEirubb/eXb95qiXPKPLE4sZiZUz1v4W6Bb6T+yxH4d0dBGseg3sUKp0ViZun4mvk6TQX+2fYIUwscux5N25t275q+5fE3w/f4O/DrUPAcSSCTSdFlGJvvFzCZDn8WNfLnwt+GviHxprS2em6bIqM677pvlVf8Aar9m8V4t5Rw9f/oFj/6TTPKjU0cj6w+G/wAYNX+E/wDwSK8T/CLRHkTUfiF4th0G3bzV3R2O3zLuRf8AZ2qq/wDAq8Ek0m2sdL8iFFhWNFSLy0/hWvUvjF/YOg6L4Y+Hugozw+HdNk+0XDJu+0XUn3pP/Za80uI7zXJPJeFj8/3fu7mr8WjH20vdL9p0exz39izX14+yNnaR1Wu68N/DvTfDGi/8JJ4kh8lm/wBV5n97+81dJ8O/hfZ2Ni/iLW91vEvy26/7tcR8dviw8zP4b0p1XduX5f8Ax6lWxEMLS5Y/EKXK/Q8x+N3ii28a3klhDbedbR/OjbP/AEGvGLvUtS+H/ihP7Bm/eKm9f92vUraz8y6+0/Nll27ttcD8RNFe28QLfww7oZk2oypXku2I/ivmOqjWnT96J6B4I/4KKXvw68KDwn8QtE1K/aDdPZrZ3Hlp523au5q8p+Lv7Z3xU/aI+yaP4huY7LSrX5V0+z3L9ob+9K38Vcl8QNHS+0+Qwwtvj+ZN38X+7XncUz2dxt3421tgcqyylL2lOFpHtRx2Kr0uVyPT1ukn8v5GP+0qfLWdd2aNC29PmrH0PXJtvzu2G+XdW3HcJMrQ9vvbq9nmOSXPGZhXSPbr5LorfxJUc2yFU2btjf3a1dQhQR7HmVqzZInm/c+XsZXpy5hx194lhkmmj+yzJ8jfLWXNvs7h4XnUlW27v9mrLB47hfOf5VenapbvfW/nBF8yH/x6iWxcSx4XZFut7oq/PX0N4XkL+C7a6+0svmLuaNk+61fOHhu4f7ZG+z5m+XbX0Bodx5fgdZnfd5fzRR0RlymVSJpXkL6hYyo7r+7Xd9371eOfHiTy9Jtrbfs/f7mhr0iPxM62YT+KRN25a8Z+M2sXmoalFHN9xXZkpSJw8feOSjvJmjKO9RvJ82xxTKOCKfMjq5R63DxR7A9Wobh5I/nm2p/s1QTp+NPaT+D+7THyo1G1J/uJ8sO37qUsNw8u1Efhv4f4qzF+Y/J96r1jNNHJ+5g8x2/u/wB6szLlOkhj03TbUXl47E/wr/E1amk+Orm482HQ9HVVX5WauRnjaE79avMOv/LFW3NUkPirWBYvpWnzfZrVv9bHH/FV/CHxHb3V9pWiyJf+JL3zb+SLclrCu7yf96vt74LaiLz9hldSMW0N4W1Ntuc9Dcfma/OW11D5lcI3/oVfoZ8B3B/4J9I4XA/4RHVsAf71zX654N/8jjHf9g1T/wBKgfYcEpLGYhL/AJ9S/NHxXpusPdXzoj8yfc21ryLpmn7H1jW22N96GFNzLXAJqdyrDyXk/efKixpuauw0JvCvguGLW/HkK395J/qNB3/Krf3pm/8AZa/IvhPi+U6nwrpOuasq3Oiab9mtPNVP7S1K42r/ALy13eoX3wl+HLQ2Gq+Kpta1hdz3Cr+7trdf7qr/AMtK8M8RfFTxb4w1KOa/vMW1u6/YrGH5YrdV+6qrXOX2ralcXz3N5eM8kjbmap5plfF8R9J2v7QHgy3meG2hj+zq25o1+8zVUvP2sNH0Ni+m+G7eVm/ik+avnGK6mjjLo/zM1Ps7O81OZHSGRi38WynyzlpJhywPbNe/bE8Z3CyW2lTtbJJ91Y/l/wCA1xV98dPiLr0vkvqsy7vv7X/8dp3gn4E+PPGd5HZ6bokxaTbt+Wvqr9nH/gl74n8TTRX/AIw8vTrdZVaXzvm3L/Ftq/Y296RjKtTpy92J8v8AhvRfiX8QrxNKsIby7Mj42x7m3bq+n/2e/wDglb8afikyX+vaDdafbLt837VE25q+8/hD+zT8Af2S/Bdz4217+y7e2s7ffLeahtjkb5vvLur5o/bE/wCCziWsN54D/Zmf7HFNuin1Bn8zzP8Aajp81KHwmcVUre9ex6Rpf7Gv7LX7Mc1s/wATtY0+81WS33Raasqs/wB77rN/DXfah4g0258OjRPDFtZ6PZXHzxR6XF96Nl+6zfxV+Xvw5+IniTxZ8QLn4heOdZuL+9m+Z5rqVpK99b9pzXVsYLC8muES1i2xSK3y1HPVI9j7x9dQ+BfhFpOi/wBveKvFUKf3odu6Vv8AgVcr4m/aM+Ang2NU8Nw3V3NuVNzbf++v92vib4tftRa3qEkltYXmfk2xSM3/ALLXEWnjrX/Fmool5eMfM+bc396sv38pGvs48p90t+098H9SuHFzY3lt95Uh/d/vP4vlqfxB+0l+zfqGivYJo91EFiXz1aJd3/Af73zV8cW+nvfN/wAtMbfvK1al5pdh4d0s3Mzx/c2p5jfxVpH2sY3bJ5YylyntV5+014DXW7iz8JeHry20tdyxSXnyu3/AaJP2lvDcMcKeH9NkaeFtss00W7/K182trH9sXvlaVN/s7v71dd4R+G/iTxBNDbfvNjN8/wAv3t3+1R7OUve5glyU9j27/hfmpapH9ms4VQru3Rxr/rNzVt+E9Q8beJmltrCFlmkXduk3MsfzVH8N/wBnn+zbUfbLDY6qru275lWvfvAeh+G9Ls/s1hFbonlR/wCkN97dWkacacfiMZVPabI5X4ffBvWL6N9b1t/KVZVV5JPmaT+9trwD/gqB+1Y+gIv7HvwguFgn1JY5/Ft9Zj97a2/8Nv8A7zfeavo79qf9pLQfgD8HNT+J1/rEYuLVNul2MMH/AB9XDfLHGv8A7NX5l/AHQ9Y+Knxqi8VeObuafUNY1uO41Sb/AGpJPu/7q7ttRDkky6dH2ceaR/TV/wAG737KWnfsyf8ABO7w5evp3k6n4ukbVL12TDNH92Ef98/N+NfeJJOMV5t+ypYWHhv4BeEvDFmipFp+g28Cqv8AsxrXo5mRByRV1+f2judWFlTVBWMD4r+JIvBfww8Q+LWmMX9n6NcXCyL/AAssbFf/AB7Fct+zZpLeHv2fvClrdERzyaJHdXW7/npN+8Zv++mrj/8AgpR8QJfAX7CfxT8UaXtknsfB9xIqbu33f8a/L/xj+3n+3H8WvAOg+GPBetR6FpS6Xaosml3X79Y/JVVX/gVeHnFSVPDKNviPUy+nTxdVx57WP198X/HD4QfD6DzvGXxD0qw/uCa9VS1fI/7Tf/BeP9kz4La23gnwPb33ivVt7JIthF+4hZf7zV+bt98HfGHiC4+3/GP4tahNbx7mltbi8Zm8yuT03xl+yj8LZLzVZvAd14n1j7R8+5WjRf73/Aq+Tti37spRXotfvPo8PgcvpyvJSl+CPp/4lf8ABSP4oftD3R1O+0GLR9Ml3fZbGA/M392uE8VfGqaHw69tbaIuoXUkqqkc33lb+9/31Xzf46/a+8c65rESeCfhXZ6RayOsEUP3njb7qt/3zXo/g3xlf+GPCt9q/iqa1h1VYIWt45vn2xt/FURw0YbHqwxMKn7uJYsfG3jDxBrmoQ+LbaGGJUjfzpk2xw/7rV5n8evHmofD7w14j8c+FdRjuJbWSRra6kbCzI8uwsT/ALSsefeuW1L4u63481zxP4J0bW7i6abbO8ccvzbW+XatdL4p+EGq/ETwNcfBy0jMd3cWi2uy5l2FWiwSGY9PuHOa/ePBqEHkvEdtnhJf+k1D6DLZtUa1t1F/qfJnwr8A/EL9sP44aH8H/BOlySaz4q1dbPTreP8A1bSN95pG/hVV+Zm/2a+5vjb/AMENf2VP2ara20P45ftT+M9f1w26/wBo2PgTwzC9vYt/Eu5m3SbW+XdXhf7HPgv4i/sD/tYWXxc8S3Nm9vpuh6klncWsqyNa3EkLLE23+Jqwfjd+3V4w+KHjy38eX/iS8iuVsI4vmuNqqy/e/wB7c33q/F6mIlh4eypRPHwuEo1H9YxMv+3T17wb/wAEj/8Agnf8UL6Sztf+CkHiDRrlv+XDWvBsKyR7v4fvfer374//ALbnwr8A+Ebj9kPwlqMepeHvhjpen6To1v8AZVjguI1j/eTeX/eZvmr80r74669qnio6xDeSRSq6sm19qs1c78Xviff+LPFUnip9v2+6iWK9k3f6zavy7q4KtXGYmPJPb+tz0o1snw0ZTo/F/e/Q7H9qTxH8Or7W5db8H6Ja6bNMzNLHZptX5v4dv3a8cj8TX8iukMzJ8m1dr/M1Mg0/VdfmSGYKjbt3zLXT+HfgD8SPFFu15pRhwv8Ae+X+KuqjBOHLPc+YxWZYipVk18Jm6B4F8beLozczQTLZ7lTzpPurXs3wh/ZHspIf7e1LWFuIo4v3sK/drj9N+CvxR0XUIvC+rePIdN8xt/ls25W/utX0/wDsG/sTyftIeMtY+Hmv/tE6xpt5ZwbUutLVfL8xl+Xd/u1x4xVoJy5oqJlhac8RU9xSuY/xSm8GfD34f2WjeErOx8P20MWy6mbdumb+9u/3q1P2Rf2rIdN8bWXizxpq9nFo/huLeuqK27azf7P+1X2f8M/2SfgJ+wva6d4c+KOveGfG+p61p10mt6l8QLJXgtY925bhVZv3bKqtX5a/tofGD4Y/Gz9qrxn4n+COh6bp3g9bpdO0aHTbXyILiOH5WuFj/wBpt22uLJcLHNcTOlf4ftG+PzbGZTaUv/ATf/a2+Pk37c37X2u/Hia28q0uorew0aHbtZrO3+VWb/aZt1el+F7pNN023htodsUcGxFj/h214Z8GRZ2t41zPtaaNP3W5Pu163oN9H5azI6rt+Xy1/vV+mU6P1eEYI+Kp4iWKryqz3kegaTvureL9+qps2zqsX3v+BV1mlTPblEtoWVPupt+6tcB4f1qOJ0R7lYV+95ddto+qblE6bWaRP3rLL8u2s6kOvMehTrHbaTC7XG93Zt3313/L/vVtwt9nsxv+9t+Td/drldL1hJrcpM+14/7r/wDoVXjrXmb0e2aJF27FZ9yyVwVI856dHEc0NDQuLn9ym+2Vzt/esv8Ae/hWuV8YrslhGQSWkJwMckittdSRWdHTG751jVvl/wB6sLxbc/aDbndkgOchMDGRX6P4MXj4l4NPtV/9NTPpuHpKWYQt5/kyafRjf6LAix5Vo0Z2rldc8PpdJsSFU2/Kzb91dtpk62+lQlZWwYhvRl9v4ar6hp7pdfZoZlf5V8plTb/wGvyriv8A5KTGX/5+1P8A0tnRzXqzXm/zPNrvwfZyTM6bWb/2X+9TY9Bfb50KSEb9v3PvV6ND4bRrhv3Kt5m3fI38NOfw7PHMr20LLt/2PvV8pUxHNLlbOiNE5PRfC9sk3nQo0x/jVovlWuls9F+1W6O8Kqn3dzfK1bGj+G9rK8tzJtX5W+fctdfpvh+GS3+zfZY32vuRpP4fl+7WMq0Y7nZGjLocC3gndCdnlhG+bzPvL/wGs/UPClztaaaFkdf4lT5a9X/seHyV8m2V/LT/AFa/LVW48NpNH5m+N42f5/LesJ4qXwhUwsYnjV54XdWZEs4Wf/llI3/sq1QuNJmWPzvs67W/8er1XVPDtt9oYpZrhV2vIvzbmrkfEelvbsyI/wAi/fatadbmlymtOjKMOaRw99Z+ZI0KJH+7+aVWT5V/+KrjtatUDTIkKqG3NL5cW2u/1eZ41+R9kSv8y7PmauM8SfaW8wJwJP4mT7rV20ZHVh5csveOE1aO2hw/ysyttT5m+b/gNZrRusz5RdjfLub+GtrWEmjtGd4t7N8q7flWueW4eNvLwrfO21lfctdq5pR909ijJe6TfIsbQu6j/a27dtSwzPNGJlhXZGnzSb/utVSTzpl/ffKi/K+3+KrdvvaFNiR/e/hq483UjFRjKMjqdY8PoY5JHhkT/gG7c392uR1jwrDJsT5d7fLtr1TWNNjbfbJcyIvm7lVW3LXOaxos0bMnk+YkPzfu/wD2aumjWlL4j8wxGHhc8xuPDsMjB0+YK+2Xcn92ren28McK7NoZn+Rm+8y10l7p81xJ8+52jTbL+621Xt7OGGYwvbLjflW/irT6x7vxHH9XlGr7pDZ2Mit+5h3hvm21pWtjNuXfFkN9/a/yrU6x+TZhETa0fzfL/Fu/vVJBNMLeI/Zmf+H7lKNTmjZGkafL8RNHshbyYdv7xv7v3aFnhhYI83y7927+7Wa3nRy+TDOx+f72/wC7RcXX753R1dP49v3du2tKcb+8pGcqkTej1Z49vkps/wBrzflZaoalrlyoZ5pmZf4d1YP9oTN8kyM8rIq/K/y/7NF5ceSwT7T935fu1tGMY6GUqkuX4i+2sT3jM81z8v8ACu/duapI9SeRXuXuVTy/uq38Vc62pJHMfLdaZ/aiKrwzeW8W1XSOtJU+aFjm9tOMjdk1J1X7U94vzN+6jk2/N/s1BHMl1I9zNMzOv3tr1lzXiXEiTXK703fuvl3bWqeG6SOQvvVU+Vfl/hrKpyqBEcRKUdT3Pwgqf8KlRYxgfYJwMfV685t1dUXUk2v8/wC6jZdqrXongxv+LQo/X/QLg8fV68xhu4ZP3szsy71X92tfsHjK5/2Jw64/9Akf/SaZ9fnDTw+Fv/IvyR0+nybpo7bZmVvl2yf+hbquyXSLN5LzLu37lrmLfUn+1jyZmlbYy/N8q1fm1D5v3Ykyv8O3dX87Vuf29+XQ5KHJKJuw6m7r53lLGy/L8z1I1x9oVIUuVRtn73zH+ZlrmZNQ8yYJ9+Jm+ba+1lq39rmZv3x3rH/49WXLKUeY9WnW5fdR09vq1tDDCnzSv/e/vf7VWrHXIYX37d+75dv97/armY9Q2xxJ9xv4G3/Kv96pLfWkh/c3LeUG2sjf7X/Aay9jPp8J2RqX6nUtrky/JZwxqv3vMVvmWrWna08bF0mUhovmZvmrkI7rzJv3j7wy/My/KtWo9T8m4CIn8H8NbqnzbE88lIk+Nnjx9B8A3lzDeNHLJB5SNH8zfNXxtrV08MjfOzp975vvV7J+0J40m1DWk8PQv5dvbxbpdv3v96vGdWZJGbuq7v8AeZf9qvvcjw/1fC80vtH5pxLjPreO5Y7ROV8WxfaLUps37l+7XL6PrG1WsJpGUfd2/wB2un15d2770q+Vt3fd21wfiCOa3vGuIX5/javaj7x4FP3SzrUz3jGF+K5a8t3gm+TcwrdtbxNThVPmR1/i/vVT1axm8tkR927/AL6olErmM61vk8wQu+f9mpdQt0ulD2yKrf7NZMy3MM3z8H+7UllfeSzbn6/3qfwj5SOSOW3kKFv96nrsmj+T5WWrkkCXy70dfuVmyRvby7G6rU/EUPlhEZ2VE/3jU8bJPD84+ZagZXR/n+Wq5Rx3Eoo8zeaKocRkf3x9anm56dqiC7WWpJt7S+1TyhIu2EZjkTZt+b79XJF2qdnX/wAdas+zDsv3K0RvZN833f7tTAkgmkfazyJ81VfM+b5Eqe+Xg/O2P7rPUKqnlr8n/fVP+8T8Q9XT7mz7tO8xF3b3/wBxagj2LN9/+CpJmhxvzupBIq3Tb2AFRs3lr70s33/wqP761US4/COrr/C8if2fEjov3PvNXHq2eDXV+E2RtPEaP8/+1T5kFQ05pvMZvn+VvlqjNDvZsfKPu1dmVI5/nG7bVSdvN27H3bd1RL3dDH3JHrv/AAT4iCftW6G+/cTbXv8A6SyV2H/BU0MfjR4dIUn/AIpkdP8Ar4mrkv8Agn2f+MqtBHX/AEW95/7dZK7f/gp1bC9+Nnhy1Emxn8ORorf711KK/asu/wCTGYv/ALCl+VI5J/72vQ9U/Z58Pw6L8C/D1mEuE8y189o5P9quj1DULbTVed03Iy/xPu3f7tPi/wCJT4V07R7OZW+y6Xb2/lr8vzLGu6uL8dahc6fp+HdmmmfZuX/lnX4HUlOUpNHn+9KfMcx8QPFd5rmoNDCGeGH5UaR//Za5ePSUt7eS/vNv+wsj/erUu5kt1k+0vtdm/u0uk+Bdc8XTp+5mwybkX+FqujRn8ZtGpyv3jxD42NH5aWcybGml3bV/hWvL9Ut0VTs+Xc9eiftBW/2f4mT6Jbah5v2GCOJ9v3Vk2/NXAXVjeTR7ztdl/hWu2nGfKenT+Ey1QtWx4d0G81u+hs7CGR5Zm2RL/eb+6tVrHS5vMCOrKzfd+Svt/wD4Jw/sl3Orf8Xv8VWCtBb3HlaNayRbt0n/AD2rojR5jPFYj2MTW/ZV/ZD8SaTo9ho9hYSS67qksf2hV+bbH/zz/wDiq/WP4K/sP/D39kP4Hv4w8YQxjV7iJn3Kv+rbb5jKrf7Ndl/wTz/YRtvBOk/8Lo+LVh9nubhGewhvItrRx7fl/wC+q8p/4KVftUal8SvFMPwz8Hzf8S2ziki3WbKqxt91v++q0rcuGhdfEfPSqSxHvTPm74n67a+Ptf1jWTGTBqDSDbI2SU27OT9BXHQ2KaTp/wDZulafDbwtAqu0aqu7b/tVsW9tFaaZ9nDllWM5Zuc9c1xPjLXftFydN0e/k/eJudmT5Vr9Z8WIueS8Pt/9AsP/AEmB1RheJzMnnaheN50Nw8sm6N2+98u6u9+G3wuh+XWNbTZEvywLI3zf981B8P8Awe8khurrcWjbbtb5f++f7y1r/ETxtZ+D9JbyZleZovkWP7y1+J1sRSwVK4SOf/aS+IVh4b0u30HSrlo5mfZKsdfNl5Nc6tNJ5yMXb52krqfHHiy68TapLqV5czM0kv3W+7HXMyR+ZJvR2RN25o1r52piPrEuaQ+WUoxGTf8AEo0z7a/yiRNqN/C396vO/GGvQ+c0Oxs/wKr1v/ELxgkcaaVpiSOzfKq7vlWvPtaZAzO+7zm+bbvq6Me5tD4TJuLf7RM6O+5pN3ys1cB4/wBBfStU81E+ST+Ff4Wr0SLyvtnnTblH8FYPim6ttShmtnTO5Pkb+7XqYeUoSO+jLl944Kxu3t22/wB2t2x1TzF8nr/Fu31zdxH9mlZD/C9W7G4/g3/NXqfYOw6aW6hk3R/eb+JVqBpHbbvHP3ty1V+1P1R03qn3tlWrX5UV3dWf/drQzj7pG0b3HyOjD+41EPnN987uzf7tWmj+X7/Kv/DTZLPbcGbewb/ZqdfhHKXUr6bZvY6wsKchvmir2/R7zyPh6jv823au7Z/s15NNpPnWcV+isz2/y7l+9tr0m1kh/wCFftHMinbKuxv7rU/fIkY11fT28Oyb7uyvKviBM82ulN/3Vr0PVL5P3rzPuG/5d38NeXeILh7rWbiV33fPt3VBpRKVFFIrbqr4jYFXApaKKoCRY0Xl3x/srU6ahc7fs9nujVuy1X8z5XcnJ/2qWO6mVfkpfELlRKLG8lk3ujf9dGqRlhhUpczMf9mOq8l5cyffmZh/dqJiWbdml/dFyls6htXybZML/F/tV+iX7PTNN/wTojPUnwdq+P8Avq5r85beF7iQIn/Amr9HP2f0WD/gnWiK/C+DtX+b/gVzX7B4O/8AI3x3/YNU/wDSoH2HBkUsZXt/z6l+cT4GtZodFhZ4Zle62/NJ/wA8/wDdrNlvXuJDNNNudvmdmf71QtM7D7/C0kbJJ8ju3zfcr8dmfFe/9o3NJ+aze8mh2hvlWo7WxudSvFhh+Z5H+7VqSFI9Hhtkmw/8a16Z+zn4M0S68SR3/iRI0gh+d2kfau2nGIjY+Af7F/xF+L18JtN8N3D26/62bym2r/tNX0Ev7Mv7OXwJhhtvH/xCsbrUlVfNsbfayxt/dZq439oD9ve/8I+B3+HXwfmj0mO43JLJYuys0O35VavkiTxtr2tak+pXmpSPPI/zzMzNuolUlKPukSp825+kHw/+OnwD+HccM2m2sN1cNLul27dqrWp4u/4Kg+Hvh3o7zeGNNjiuG3M9rIisq/3a/OJvG1xptiYYbmRX+8+2uY1nX7y/kV5ppC/97f8Aw1lKM6m8hxpwUT239p79ub4tftEapN/wlXjC+ubbzWX7PJLtRV/hXateP6WlzfXS/LisiGHzm2Abmauo8N6b5MyNMjKG+WtIxjEfuRPTvA7WtnpG/ftK/f8Al+9TvEHiy/WMw280ixfd3bvl21V0Ev5K20L79v3Nv8NXrHwjqWs3z2yQsxk+9troMvf5zC03RNS1S63+W0hZ/k3fNXrXgn4bPb26zXW0Ns3bv7tdR8Kf2f7mGz/t7VbPEUarsZnrttc0fStH02TY8YMabVXZU80Sebm+E4q3hs9JhFy8O5I13M275mb/AGa8v8eeKL/xVrn2LTd3l72/d10fxK8XfaJ/sdttHzbdsbVT+H+g6Da3D63r1zHiT5kj+981R7TmJjRnH3j0P9nv4Pw+IFhl1VIbdYf3sv2ivprwfpfgDwjpkUO+H7Zubzd3/jtfJN58eLDw+zw2dyscX3d3+z/drB1T9pPWLqRUfWG8hX3bt+1qy9p9k19jzR94/QlfGHhtpt6bYopPlRfN+78v3v8AdrA8UfETStOZ7mw1ViYWVkVZflX5fvV+f2oftVa3bvvtNYmYxp/z1rDvP2ovG2oRyo+pSbG3ebt+61KPNLRkxo8p1n7aXxO1P4v/ABWtPB8OqtPp+h/v5Y1ZvLa4k/8AiVrqP2P7Gz034jaVf+R80OpW+5WXd8u75mrwrwGz65NLqty6vNNO0r7q91+CrfYdSS8s/leGWNk2tt3Mtc1Sp7OrE58R/Kf0x/sl/tFWGp/DvSLO9uWdo7VV87d95dtez33xt8N2dqlzM+5W4VVb5mr8nP2M/jxef8Ivav8AbNm2Jf3ay/dWvpi1+Jl5qkYs/t7NF5XySL8u6vbpyhUhdxPM5p0/d5juf+CiPxPs/ij+xx8XPBPh6xk2XHgHUAkjJ96ZY933v+A1+SnwB+OtnN8G9A1u5v4UH9g26SqrbpGZV2/NX6Z3lm/irw/rfhjUrzzINU0a6snVn3LJ50LLu2/8Cr8Avhv8QvEPhXQ9S+F2pTNDd+GdevNLuo1+XcsczKtfO8Rx5sMpRXwn0XDtaNKrI+vfiB8etKufOhhud+75/Mb73+9Xifi74kW2rTzXNntiaSX/AIE1ebar4qvL682fatm5dyfPXO33iS4t7r7T/aSokKbdqpur4WVacj7KnjIy0Pa/C98+rXiarretxxtHu+98q7a4342fHy51LxE9homqsbaO3WBfm+9XmmqfELXplWztr+OFG+//AHq53Ut8zM9y7Ft3ztv+9WtOVWUbSIljIxj7h75+wL4ihs/jxeXOsfZ2ims1l86T7u5W+7Xvnxh8ZjTtL13x1AuAZpLlVRuAHkzjPp835V+f+l+INe8N6out6DfyWlzD8rtvb94v91q+wfiXrMkn7LTa5ekO82g2UkpPcuYs/qa/e/ByMlk3Eb6fVJ/+k1D6XhnG06mFxClvGN36WZ4j4y+LHifxZJse/mKKvyeZL/D/AHa5+38B+Cdd8C6xqupaxdQ67avHLpFvb7fLkX/losm7/gNYl14ks5I9iTbFX7yr95ql0W6triORJpv9Z8yLH/8AFV+IfBq5HL7alWlrK5w2pXlzY3DGF/49u1vvbqfpcmpahJ5E1nvf73y/xNXT+NPh/o6TLeaPqXnSsm+eFv4WrL0fXE8O3EdzNb7drr95K6ZKlOHu+8ePUUva8sixcW+uaTb/AGx9BvNv/PRbdm2/8BroPDf7Qn/CO2/9lfb5Eb+7cIy17T+zz8fvDf8Ab1tD4h0e3lRn8po5ol/eLXvWvSfsZ6feRXfjz4XaTqVtJ8zqsSxNG38O1lrzY1MJU9ypeMkbU8PWTvB80T458NzeLfjlrlrB4EeTU9RkfZFb2aM7f981+mH/AATC/wCCdH/BQH4RTXHxG1n4J6e9tqEvm2q3mvQwSs395v8AZr2//gln8Uv2Z/Dnjy3+Hvw7+Hnh3RzfJJcNeWtnD5/lqv8AFI3zfer7rn+Knhu1uv7Nt4Y2j3fLJCqqq1yYh4Tlt0PbwuGxeElzw3Pxn/4OCfhD+0l8HPAXgnx18XfFuiyv48164sL7R9DRvKsYYYd0cPm/xN/6FX5h6LCkLGCBNkW9dsa/w1+qP/Bzr+2J4P8AiX4q+H37HPhKaO4ufCt7J4h8UNCys1vI0flxQt/tMvzV+VOn3kDats+XEn8Sr/47X2mQYOhhMDH2ceW+vqfnud1KtTMJqcuY9G+HupTabDLB5ylmfdub+7XceHfFybfk3LtT7zN8rNXk2m6hJaqyIm1WT7y/w1f8M+MMRpveQur/AHl/hWvaqfAedR933T6H0XxVDuSZ3Xatvt+ZN3/Aq63T/Eb2scU32lVfZu2qvyr/AHa8F0LxIt1dIiTfMu35Weu20fxnN5LJ57bl+V91c0eY64ylGR7PY+IIV3+VuDSLulZW2qzVqw61Db27v9tkzH/qoZJdy15N4b8VI9uYZvk/6afwtXR2+sp8n77O5FrGUftHXh6x31hrlzbzF3m+6v8AF97c1Lql3HdJEVO1lB3Rf3Olcxa63N9+Z13t97/ZrT0+6a7DydQDgMepxkV+i+Dcb+I+Db7Vf/TUz67hef8AwqQj6/kzo7K7lNpG8gZhEgXy1bkr7VdjmtpE+0+dIrsn8XzN/vVzNpq9ukjQRSEGP75WTGW/u1a03XEYzJDPHu3/AHWf+L/er8p4tt/b+M5/+ftT/wBLZ0KpKOKm13f5nV2dun2MpDN975v96r0drNHh/wDWN8qvCzfKtY1jrCWqql593Z87L83zVr2uoJ+5SEs4m+avh61OXNzcp7OHrcxu6bY2s376G2U7v96tnT7e5jj+RF+ZmbdJ/C3+1XPQ6sm1PJjYN/d3/LWhDrx+0JbQzKGZWZ7ff/7NXnSlKU+WR3+05jaaJ1mFzCn8Py/3Vaqt8u3dMgUbk/u7arTa4kLMiOpdvuqvzbaz9S162tY2mubloyz7WaR/++ajl5dipVOb3WQaps+xzXmyRPMXY6r/ABVx+uSPNC1t/AsStWvrNxc3CunnSOPKV3Xzf4q5m+1J03ec+G/5ZMr/APoVdMYy925cZfZOX8TbJJlhxIxb+Jv71cV4ksZmhkeaZv3fzO1d9qUcxm3p87/wf/FVxHiaSF43h8n5t3zfN96vVo/vdjGM+WZ534hZ5N+x2Td8yL96sKS3mhDwj+FN27Z8u6up1uBJbpdiNCqpt/vbqx7uOOP93Cm0/wAfl1304np08Ry6lGO3ePdPN5hP+1/FWhp+n+cf9Svy/wB1vu/7VNWR4YQ6WzKn+18ytWjpMfltD8+yKZPnbb8kn/Aq09/4i62JjytHockKQ4hSdZWb/lo1ZGoQySM9s+5m27vM2V0l1YuJGj+4n3t1ZOo2ryW7vchjt+5tb7tT7sZe6fE1PeOYuNNe4VXebLN/yzX5vlqhFp80amYOreZ/d+8tbC21wrIlzNMsW/5ZNvzMtFro8LXUPk2EmJEYsu/5l/3lrblhGXvHPKPu3iUrOzmuI/kRdyv+93fNVn+zXkhim3r/ALS/drasdBe3jldH3MzfN5abVWra+H4bqY74Y/l+8zS+Wq1nzRfwmdSjKJyVxpaRrJ+5be3/AC33/LurBvNPeGGP5M7VbYv8LV3+oaDDGfOSGRiyN/qW+Vq5TVLN41be7A/M3zP81dtPljDQ4KkeX4jkbyZ4WXztqLu2/L/DtqlqWouq/uXz/Cm5v4as6sba3aWaZJG3J/vVzepalNCzJsUt/Bu+7XVTjKUos8mtU5fdLv25E2uk3K/Nu3/eok1KFwdgZpNv3lrnm1rbv2JtT7u3ZV+3uplm2O+dybt23+H+7XdKny+8c/NKRr2+oOtvseFtq/6pVqza3UNqXlf5U+81ZtrJIrJNH5ixs33f7rVfh03z5Bvl3N83yt93dXHUjCUrMr35aH0F4GlEnwSjlkPH9mXPPTjMnP5V5at08d0mzd5W/cjf3vlr1PwOxPwURmiVf+JbcfIg4AzJxXmNrY7k+R921NyNH81frHjRLlyPh1f9Qkf/AEmmfbZvrQwn/Xtfkixbt5cm/equ0X3W+7UqxzPh3Zf+A/Nupmnw+ZCN6b9z/d21Z2+ZtdIliX7u1W+9X8+xnJx9w4I+7GJDJbzQ22+F1R/4f/iqns5kb7k3yqn3du1d1RyQozPjbH5e5WVm+anx2rw26PBM2P4Vk+as51JSjy9jrp1JR90kkmufL875W/iT593/AHzUtrqDzNEnkso+/tb7q/8AAapN/o/3DIrfd+X7tSWm/ck3nM6r8z7qco80IxO2NaMYaG3askkDzPud9+5VX+FqmupnsrV7l7xVWOJnfc33WrOW8RG+R2V2+/8AN8tYXxW8SRaTov8AZUMqr5yN/tV34XDe2nGETnxmMjQw8ps8j+I2uQ6xr1/qtzC37xPvN/FXm99qaW8jvHMw/wCBV0HiyZ2V4U+cK7bJGevPNSu3eb55l3f3q+9pU4xpcsT8vqT9pVlN7li8vkkZvvb/AOJW+7WFqMCXXm/w/wC1/darElxHLJsR9pjXc3z0tts8tt7/ADM/z1vymXunJ3Vvc2N9+5fipY9aQt5Nzyf9muh1TSIREZvJ5b/vmuHvrhLe+l2HaVb+5T+2OPvF3UrOzumEyQ/O393+KsS6tZIpG/dbQtalnqyN/rguV/8AHasTWcN4vyP96l8RfwmBBczW3yDpVmZDfL52V/8AZqs32iuql0f7v3/krMVnhk+R6kv4gIeFsZpXm81drJ83rVvEOoxAqwEu3G31qpPC8LlHGMUAMf7xprLnkU5m3UgbdzQWLHhm4NKykmmKu2lrQCzZt83rWhbs6/I7sQyVm25KkfdrRRt1vn2qYmMiO5kf+4p/2qgLSN8vZf4qmkjRW+/j/Z2VUkYLnY+P4fmqZS5vdFykjNs+5Iuf9qmtJGFZGT7v3KZCybmR0zQ8if8A2NPlgWQyfN8+ykoop/ZKiFdR4LXzNPZEG5t9csxwOK6TwT++tXtv9ujmFU+E3bpfLj/cyL81ULqHZ8+f4P4av6mqW8ImTd9/bt2VQmk8tc9C38NHMYSPX/8AgnuGX9qjRAX58i93L7/ZZK9Z/bp0BfEf7VHgXS5Y1McunW6yMy5wBdTH+leU/wDBPuNP+GqNCl3Ek2t71/69pK9+/aY0yLVf2t/CaSSOBb+GfPdU/i2zy7f/AB6v2jAP/jRmL/7Cl+VI4qq/2len+Z2OqalbRyXDp5ezd8it95dtcJ46l/tC8FrNMrMvz7pH+7W3c/6l3MPz/wC1L95mri4rXUvGHiZLdJt0K/K3l/Nur8Gp0+afKcXtJRlzGl8Pvhjc+ONcie23SwtLsVdjNu/2v92vuf8AZ1/YMhm+HWreNvFX7nSdJ0i6v7242fLHHHG0jLu/u7VrL/4J+/sn3/jnXLCyTTbrbcSr5q7dvlx19vf8FZJdB/ZK/wCCRfxY17w9M1vcXHhePSIm+6/nXTeSu3/gLNXv08PGjhbnLF/WMZFH8wvinXE8VeKdV8QRzM4vtUuJ4mZv+WbSNt/8d21nxx3KyKidP49taGjaO5tIS+07YlH/AAGrnkwwzDemAzbdypXGfSc1jpPgd8Kdb+KXjTTvA2iWEj3mrXUdrZqq/ekkbatf0rfsFf8ABN/RtL0nQbnxVoNrFpvhfSbe3+WD91cXCr+8kVf96vzA/wCDaT9l3RPj1+3NpureJ7BrjTPCekzavIpT920i/LGrf8Cav6CvjJ4ts/Cfha40Dw3bJbwKnziH5fM/2VrsoyjGJ4eOqTrVf7p88ft0fHt/CPhW88JeFbxbG12bHaNdu5VXbtWvy48c6ii6lePM7YkuN67n3N81fW37ZHizUtSkENtdSPEr73Vl/vfer498YWc17q8t5bRrsb7zL/FXNWj7SV5GMfgM6eV5tFmkVTuMD4BGDnBrj/DPh+FZPOd5LmX5l+5u+au503Sbi4EWjsS0k77BvOSS54/nWr4q8O2Hwst4rB5F+0yMyxRt8zK38Nfr3i7Up0MjyCUumFj/AOkwNOZLQ47WtYh8G2rTXkK/a2Xavz/Nt/u7a8W8deKNS1q+e5vLnarfLFCv8NejeLmudUhuHmmWW4kdm87b8qr/AHf96vNvEmmW1n5r3Nzt27W3L/FX86YiU8RLml8I5S5vhOWvoHkX532/w7W/i/2q4/xV4qmVja6bu86Pcu2P7q1qeKvESX15JbaVu2/daT7tcffN/AjyMzf3vvVxU/5Xsa05Rj7sjEvZnW6d33O7J93+7WLfiFVLybXb/wAeX/ard1Q7oykdsyLs+eT+9XD+PNfsNFtHgtXxK33mr1KEZOR004zqe6Zmu+KIdPjOyZX/ANquR1PxPPLlLPdjP3mrNv8AU7jUpjJK5x/CKgZscCvZp0Yx3PTp0VAGZ5GZ35NSRvtPXH+1TKK6OU0kbOn3SLGEHzf71aELPJD86NXPWMgjkXY9dHpqm8XG/lf4aOUktRK6ts37v7tacVvJIqv94/3m/hpun6akki/Jkr8ybkrYktPKVJoXXay7WWnze6YS+L3g0G1S4hlsn2v5iMu6P+GtuS1ez8AvZ3PmZjlX7v3vlrO8GyQrrH2Z9qbl/i+7urpvG32ZvCMt5Ci75Jfm2v8AdpRIkeY+JNQSOxld32t/drgJH3ylg9dJ4w1FJYfLR/vfermQDnLVJ00/hBhkcUKu2looNQopGOBxS0AFFFFVygFLHhm4NCx7l+em8sPSnHYmRaiuEjj2Inzfx1+iX7PmD/wTkT38G6x/6FdV+ce75sV+jn7Pv/KOJP8AsTNY/wDQrqv13wb/AORvjv8AsGn/AOlQPseDV/tlf/r1L84n50xk7tnf+9uqxDIkd0oyvy1T3t605ZnXPz1+Pnxso8xuTaw7TL/s/LV+L4gaxYw/Y7O5ZNyVySyOn8dL5zsfnfijluHKy1faveahM8tzNvbd95qktbpLZV/vVQbZjilE0i9GoCUTRuNRnui6Oyr/ALtJa2fmSCGY/wDAqqQLDK338VZW6VF+dvlV6v4RcvuGzpOmoI1m2LuXd8tdHosyKqF5vl/u1wn9pzRt8kzfLVjTb52z515Mw/uq9EdjLlmet6HfbrpfJvI02t/FXsvw18R/DTwCn9q+NvE9ncTL86wxv96vlttQ0q3tWmuZrpfk+SP7Rt+asDUdViumzskd1+6zS7qzlGXQrlj1PtLxt+214CgD6boN4qRqnyL/ABV5r4w/au/4SBX8m/bDJ91flr5wS4ST/XQ7v71Ss1mql0jVWap9n7oRjE9Sb4oaM159tub/AHDbu+/96mXnxSs7iZPs1+sQb7+1/vf7NeTNePHI3yL/AHals3825Akfcn3sGrgOUTuNe8dPeXAh3rs/urWReeJPM3/v2X+H71YU198v8P8AwGo/Odl42/N81Ll/mJj7ppnVHbKbtr/epJNSmjt2S2mbe1UIrpyu/f8A8CqW1vPnZH2tTCXunrXwhjabw/Dsdd6/e/hr2z4c3X2dvM+Y+Wm99qbtq14H8FdSddLkskmYlbj5VZv4a9r+Hd463ywpuCTLsb+GvLrR9/3jz8RH3j7x/Y58ZPJDZwojSIr7FVV2tur7g8ByTXlv/plyqIy/Jt+9ur8z/wBlvxIlrqDw+cybvL+WOVvmZW/u193/AAl+LiQ6ampWEO9422SrJ8yr/tba9LA1vdtM8qpTlL4T2zwPpOsf29CsNyyQrcf6xn+8v+1X4W/tqeCL/wCEP7eHxg8GeT5cbeL5L23VflVobj94tftp4d+L81nqx/sG5hieaJt9xJ8ywsy/3a/M/wD4KsfC1Na/aw/4Wp52+HXPD9vFcXjRbfOmh+Xd/vbanNPZVsM4HpZTKdPERTPj/UtSv9vzp5RV9u7d96s+4k/cu77Q7fMPk+9Xd3ngHUNQuBYaPA1zMzf3P7tc78RvDmp/DB9Li8d6NdaU+u2bXmjNfWrJ9qt1ba0kO77y7v4q+Jll9WpG8In1Uq3s5ayOcvI5reUvs+Vk3fNVNm2sN6b1hXc7N8qtXG+LPjpZ6XI1no9q1w6/K8kn3a838Q+PvE3iOeRrzUpFjkP+pjbatdmFyWvUj7/uoyliP5T03xJ8WtB0e4ltoU+2T7tu2F9yr/wKvtn4mXIuP2LlvHULv8K6c+30JEBxX5j6VuOoR4Xdlq/TH4s7rf8AYdIjxlfCWnAflBX9BeE+CoYbJc9jHrhpf+kzPpeGqknhMe3/AM+n+TPiOz8aTNceS9tlFl+WRq0rPxwin76oN+3bXC/PDcNs8xPn/ibctXoWdpNiP/tV+OyyvDVN4nx9PGV6fwSPRbfxNNeL+5maV/4/9mqlxffapPs3nfMrf3v4qw/D+pXNvKqCH5G/5aVZ1iz8mZrm2mwu/wCasKeS0KctDSpmVWUfekdn4A8J+M/FmoJp/gLR7rVb9tzxWtn80n/Aa0tY1D4x2M7+Htb0HWra6t5dz291YSb93/fNcx8M/iN4k+F+uWHjzw9eSQzabeRzqyvs+7/u19p33/BQ8+MPDFlr1neTXVzdf8fVrbwK0kn+zuZflWvXwPC2VZi7TfLI8XH8SZnltpUo3izK/wCCd/7QVj8F/ii/i34u6DeaUsem+UuqX1u0UTKzbtys1fTf7Vn/AAXI+Hvwz+Hd7o/wQ1ux8VeMb61b+wbfT/3lrp7f89p5P9n+Ff71fFnxq+LXj/41aLcaV4h1W1s7a+t9iabY2+75d3yr81fPHiX4d6x4Lwtz4emtrTbuVvIZV21lmfh7Qy+rHEKfNB/ZO7L/ABEx2YUvq8klIdrXjDxh468Ua18SPiJr02s+IvEF011q2pXTbpJpv/ZV/wBmqMbzQ6kroihG/hb+9SRxPGreS8bPv3f8BqPd/piQoiu9aRhy+7EzlOc580jo7hvJ0+W5dG3bf4q5fRdceC7ZN+5d/wDC3zVv3myaw3o/3l+fbXCrcwrfMj/K+9vl+7tp/EaUdz1Tw74k/eJDI/y/3m+9Xb+H/Ej42CZWeb5v7teLaHqnkyBw+3/a+9XZaPrUqtsdGdtn3v4aylR5jo5uU9e0vXHuIUm+aJWdv93bXV6D4kd4US2mjRG+bzJH/h/iryXR/EMMMiohYMybnb7y7q6PR9QgaFPPfJZPnVX+VazlR/mHGp72h6rY65cySCF5o3Vm/wC+v7tdp4MvzfJckk/Ky/J2Xr0rxvT9ciWZNkylFRlb5a9P+EMolsbt1nDqzoUx2HzV+geDtOS8RsHLyqf+mpn1/CdTnzqn/wBvf+ksl1C6a31e4isZ1QGbfcFV+YjPNaunatuuEdNuxXbdI23/AIDXMa1Kttrt3LNtIaZwGZ+nPTbVq11S2jmX/Vh22s7bP++Vr8x4rp+2z7Fxf/P2p/6Wy3W9njpv+8/zO5tdV+0XDv525m2t5i/8tK14dUhtLj9zC277yNv/APHa4OHWnjYPbPslmdt7L81WYdam2pHDfyF403N867mr4zFUfd5Ynp4fGe8d7b+IGhuInR97bP8AU/e3VpW+tzMxhjm3bvlfy/8Ax1a85t751VJppv3X3maT71a+k6oiyeZC7Mv8NePXw7lVPVp4qMtUdlJrVzMu93VJV+Xav96qt9qUMcfnTfN/e8z5tzVi3F0i3m/ZvCoreZv+8v8AdqGS+eONdu3+981Ycvs+Y2lU5pFjWNQeNvOTy1Zv4Wb5l/3a5241KaaUP5y7d3zNUt/qSfZ5ZJn3bW3IzfN97+GsDUr6GOHY6KvzMj7V+6v96tKPNLcunUjEmvNUjhjcu8aDzflZX/hrm9evbaGxdH275Pm8tvm+aodV1yGON4bN2x/Hub5t397bXJeINcmvpjZpeRh1+ZpGf5m217GFoy5jmxGI5eUr69ND5zwQ+X+7Rfu/Kv8A9lWPJH9ouHTdkt91l+9VbUNagupC6bf3fy+Wr7mWqf8AbTo0XzfumfdE0f8Aer144fmjGxH9ocupuwzJDb/fYoqf99f7ta+m3CR2apMm6JfuR/3a5eC6eO4KO64k+bd/drWtb6OTa7vJ83y/NVSo8vwkVMzjOWp7hcWc0cju+0/N/vfNWbqmmpdW/wAkPHlfvdvy7a2lZxcP9m8yFW3Inzfw1JDb+dK6eTuRlVX3fd3V50pSjqZxlCRx3/CMWat9pSSR/nX5qn0/w6i3Hmw+d8v3m27mbd/erp20/ddeT5Me5m/hrS0vRdzNv+R12/Ky/LJSlKIcq5eWJiW/htI2/veZ/eX5t26rj+GhZt52xcM/zbq6eGzRdjmRS2759zfdqWTTpreGSZ7aMvN8rrG+5VrQipT5TgdQ0Xy4dn2bZ87b1ri/EmizKsvkptT5vlX/AOKr1PWh9njWGGFVZk+6zbt3+1XEeIoXmjdPJ5b5vl+61XCc46nn1ox10PGddtPszKjovzfN8rfLXD63ZvNcPNav8sb/AD/P96vSfFVi6q/ksqCNvkbyvmrktU0lJG8t/wByW+438Ne5h48sOZnzleO5xMNu8f79PmG7czSfw1oafcXUm77TGzL/ALX8VWptNmWTyblFYNS2Mc0jvbTOuF+ZW3V3y5ZHDL3eU0LG1875NjRIybt275VbdW5odpc3UyQud6t/y0rN0+3DKba5dj/fX+Fa6rRbHy1S2hZW2/d2p92vPqctM76fvHsXhG1nt/hGlrIxaQafOCT3OXrzq3tYbWNfs0G12RW27NrV6f4ZTyfh0kcZ+7aTAZPu1eeXkUN1dDzplj/dfKzJ95q/W/GOi6mS8PSte2Ej/wCk0z7LN5RjhcL/AIF+SH6TshbyURiWb5W27VWmx2pt8Q7Msu7aqp97/eo+0Qt8kM2x2/h2/NU8Pk2wKJNJuZ1bdtr8C+rxjUPMp1I8vLKIq6bNNtd0V327kZUqG6jLwjfOzxsnzqvy7a0lj8uOWG26/K3zN96s273xsYUuYyW+9Ht27aylQ5feKjWjTK0kjwyJ86o2z7u/dVaPVolYpCjff3f7zVV1K8CSMIUX5trP8vy1lw3ztM2xF2M3/LOuqnRjL0I+uSjLQ3o7raxuUkVE3fdb+Fv/AGWvNfiZ4k+2axtd8RKjKu1PlZq6nUtSh0/TZZt8jMyfIrJ81eG+NvF1zcXU1zNKy/3Pmr6HKcHGnKUjws6xk6lJQKmt3TzedNbTZ+bbtrhda3rI3zrvV62rHWHaN33s27+H+7WJr0yTS+d/6FXvQPmZGb53+3y1Tw3SRyBN/Lfe21n3Fwkcfyc1TivEkmZxuDr8u3dQUavijXktdNeKGZt7LXBzSSSSNMXyzVratcSTN/u1msjt1StBxlcrZOeXY1Zs9VubOZXSRtq/w1C0Pl7eflamsh27kWpkafEbsOuJeK6TIuGqhq2n+SouYU+RvustUPnUVpaPqkKt9mv/AJ0b5V3fw1IuWW5mxO8Mnmd60murbULEo8aiZfuNT9R8OTAfarSZHik+ZdtZcgmtpNjqytQP4huHVvnopWbd2prNjgVfMiwUYWlooqAHwLubIq9bsnl799Uo1/5Zn+KpoWRW2P8Awv8AxUTMZE8kjK3/AI7UEyoy79n8dLNJtb5JN1I0u77+3/gNARIoup+tNkG3kvk0rYx8lMf7xoKEooooNBH+6a6T4fyJFJNvT/gVc2/3TXRfD+VFu33pVx2M5fAdTqFv5kO9H3fw1k3Vu/nP/s/N9yujms0ht12bfm/iWsi6hdm3u7ZpfEc56t/wT+jK/tSaAw2qDa3vyr/16yV9O/HpYNO+OEXiG5jUiPwnFBGf4gz3M3Svmj9gGJ/+GntCfbwLW85/7dpK+i/2tL/7F48sI1KqZtJjBO7BIWWU4/Wv2XB+74E4v/sKX5UjixH8dehgnXLm+mM00PyLEzvGyV7L+wP+znrHxe8ZQpJpUnk30qv+7Ta0a7q+cobua4ki01LlovOlWKWRX+ZV3V+1H/BG/wDZR03/AIQ3S/F1h5awwzxw/f8Amb+KvxvLqVKVTnkeViXJU+WG59ofsb/sX6B8FfBNtf3kMYnmtV807fm21+WX/B2d+0XBq/wO8N/B/wAI3Ey2OqeL4kuvLuP3U32dWb7tfsp+0p8X9E+FXw51C3h1SGG5WxYBWfDKv3a/mq/4OAPiJ4Y8WfF74b+A/DepXReGyutUv7WS682NZGbbGy/71d1ScqtPnn8jvw+Fp0K8Yw6fEfBun2M0caP5KudnzVKghkmCX9hu+b5dtaVnZeYq/N8rfw/3qsx6LukCI7b91cX2z0JW+E/bD/g028Gy2E3xW8XxQxxQNolna+dt3SRs0jNt3V+iP7R3i5LfNnZzKFj+RGX7tfnJ/wAG0PxUtvBfgX4teCby8hRrrS7HUUZfvK0bNGy/7vzV9gfFL4oWGrXks1tC0vnL8i+V/wCPV20fePDxMeXlPDP2gpvtVnNqt7M32nfsVv4VWvEdB+Eut+LNW8mzs5EST7snlbo46+i7vw3qvxA1SZHsNsTf6pl+Wovjd8Sfh1+yX4PhtoJIZvEF9Fs07T12yTs2370n+zU4ipSpwvMy5XzaSPkrx3oy/DX4ny6XcwmUaVcW7yR8DfhEcj8a888ZeNte8VeIpvE+sCNrmZ22Rt/yxX+7XQeJfFuteObm+8X+IJS95emSSYsPqAPwAA/CvOtU1CG1jm/fZX7rfP8ANX6P4z1H/YXD774WP/pNM1+ymyO8WG3Vrm5uYUXbu27/AJa8O+KHjD7drDw2c2yPbtWFX3LurpviR48RbR9K0253vs2quz5dv97/AHq80j02a+unuXVvm+bctfz1GtKvsXGXNuZt2yXErbLrG5t33Pmps2ivGz3OpXKt5f3P4f8AvqtSaztrWF5rmFTt/wDHa4jx14uKwulteRpDv+eT+9/s1vGjE2jT5pmP8SPF1nZRultMoVvmfb91a8R8R65c61fPLJMzIG+TdWh438X3OuXjwxTN5StXPKMDFe9haHs4XZ7VGl7OI1V3U5V20Ku2hW3V2cqOgFXbS0UURAkVvmyP4a3PDt1I0gT/AGq5/cfu1e0e+eGZE3/xUpRIlE9Z8O25WFfuhvvL8n3atX1h+73iHd8vzSfw1neC9U3xo833W+Wusks4bhfvsibfkqvscpjKJx1nvt9W+0oigq+5GWuj8aXv2fwSXTbhn3PJv+ZflrD1axfTZvMhh+VX3basa1Nc6t4BvLOGHbtt2dt38O2oJ9n7545qN295cM+eP4ahjh82THrTWOFr0r9k7wn4S8dfHXQvB/jOwkubC+uGSeON9u75WoqS5Y8x1xjzaRPNmBXgiivsX4lf8E6NB1Oea++GPiGSwLXDCKx1D5olX/erwjxj+yR8b/BzO914PmuoVf5prH94u3+9XNSxmHq7SNp4WvS3ieY0Vf1Hw7rWmStDf6ZNC6/eWSJl/wDQqqfZbnbu8lv++a6ozRhcjop3kuv3kxTeAKQuZCsfmz6UlFFBQrNur9Gf2fP+UcSf9iZrH/oV1X5y1+jX7Pn/ACjiT/sTNY/9Cuq/X/Bv/kcY7/sGqf8ApUD7Dg3/AHyv/wBe5fmj85k+8KGG00lKx3GvyL3T48Siil3fLtqSeZCUHPeiigdkSK3ylD96mD5l2fw0csv0o+98iD5qBRHrzt/2vStKyVLWHf8ALtV/mqhHCjf71TXV4qxeVC/P8VVzESVxNSvjeXG/HyDov92qrOQ386WRm3mmVIy1bs8ak72pl1Ih27P7tQq2T8v8NDNu7VXxFcrF2D1NWbf93C29P4Kgjbc3z/eanzSbcIjttqSZIduRVxu3UrNlV2cn71Vy20kUsTMrbw/NAFqbfCn38j/ZqLzAv3Hx/fqNpy2Pm6U3zB/cH50Adf8ADXxA+l6wltv2pI/8X8Ve9+CNatm1S28l2c7/AO592vly2umguUuU3Eq33lr234X+LIdUhhm+04dU2uu/5lrjxlPmic9anzQPrv4L65c6Lr9lfvMu2OX5W2/LX1V4N+LFta2ahLnaWdvmZvlkX+LbXwT4J+IlhCI3v9VjhRf70qqq13cX7XfwF8AWq3/ibxrFd3EL7fsNs25v/Ha8b2uIheMInlexq8vwn2w3xo+15fTUkb/Zjf8AirnNU/Zr1v8AbmuLn4Y6V4wh0bxxHpdxP4Ih1BP3WpX0a7ltWZvu+Yvy7v71fGXij/gsB8OPD6TWvwy+Gt3Kyrtgnm2pHt/usrV5P8Qf+CtX7SHjG4SbwTBZeGp45d9reaeWaeFv4WVv4Wrow9HH1JxlKBtSw+JjNTXun3/+w/8A8E6/ivD8QbzxP+0/pWpeCfD3g+Ka7+Jeva5b+Ra6TYw/NLGrN8skkm3av+9XwF/wVJ/bw1r/AIKA/tm6n8adA03+zvBmg28eh/D3Rdm1bPRbf93D8v8Aek/1jf71WP2pf+Cq3/BRT9sX4b2HwS/aP/ar17XvDdjbx/atFjSO0ivmX7rXLRqv2ll/6aV4HDEjQ/PCq/Jt217kIxjK6iepzSUPi1OV8V/NqDzJ0Z6y62fFUSRXHl7MCsatTSnIuaDG8mrQqn96v0m+Odwtn+wnNPKdoTwppuSO3NuK/OLwbZ/atchR3xtfdX6JftJyGD/gn/eyKenhTTO/+3b1+veGH/Ipzz/sGl/6TM+v4Y1wmPj/ANOn+Uj4WWZLiH5HXbVmxjjmkZEfdtri7PXpIVMPr91j/DW5pesfdSN/95l/ir8dPipROphRFwmdyrWza2qX2nvbTf63duRq53T75LhhMnH9+uhtbh1nWG25Vk+8rVpT3I5oX5ZEcMf7uXSb+HI2fe317j+y5+xz+1T4806O58LfDe9bRr5mlg1CC3Zo9qqzbty/d+VWrxq7s+ft9sm14/4f4f8Aeav3K/4N7/8Agqh+w/4c+Alp+zN8bfENt4V8ZPc/2fK+qhVs72Nt3lMsjfd3bq6cPjfqVWNSx52PwksbS5Iux+Qmv/tTeAPh2raR8P8AwaPEGt2dzifULlP3Uckbf3f4vu1+1v7J/wAPv2IP2zf+CW/jLx/8btM8Pt4gtPAd9qN79h2pc6XD9lZlby/vKyyKa+Mf2TP+CWi/DL/gqB4ttfj54GhvPhvdeJLi5t9Us4Fls2t5rhvL/e/dX5WXb81fVX/Bej9mz4Z/8E7v2XNc+NP7Jvh6405/iFpyeCtUt7eTNpZ290dxuN277zKrKq0sfmlfMa0Vz/CceCy+hgY88Yb733Pwc0FU/su1/wBJmcNEzeZ/eX+Gq02oPF4khttn+si+fbWja6Wmm2KQ9oYtm5n/ALtcbpOqTap463o+7a2xPn+7WcfePZR6T/rNNJ+9t/u159eLt1B3TdnftavQ7dvMsf3L7tytv2pXGXGmus0yb87Zdzt96spbG9GPvO5DY3j+YUT5GX726uw0PV4FjVJpm/3o65SOF4mRNnzrWlpsvk3B+7/wGtYxHU909B0nVE2q8L7i25dtdHo+oTSMqI8bIz/e3fNXnljqvlwhERmP8ddBo99DIqwsnlbfut/DUyp/aM41OWVj0Wz1gOyfvtu379ez/s8zRz2epvHISC8J2kY28PXzrZ6ttkZH2srfd/2a91/ZRuFm07WVA5EsBY7s5yHr9B8IqfL4gYR+VT/01M+u4Pqc3EFJf4v/AElkuvarAfFl9aTP928kC5X7vzGrH9uWklqnkuqP9193zNtrhfHWvmx+IGrRm5XZ9vnBU/7xrMXx4kcfyTr/AHdrV+a8T4WU8+xTj/z9n/6UznxOLgsZUj/el+bPSrfxA8PmbH+Rl2o0f8NXLfxZbxqEeaNGX5V+626vK5PG32iGKf7Sp/2Vaj/hLv3b7IV+V1+6q18tUwfNGXMa4fGcp7Pa69C3lvNNGV+9LGv8Na0fiKS1d4d/3fm2xv8ANXiOl+LplLbzJ8z/AHWbd/wGtuP4gJb3D6g9z9odk27m+XbXjVsHyn0OHxkJQjKx63/wkieWfkkiaHavlt825f71VdS8cWyyM8J2Bd3lRs25tv8AtV5n/wAJ07Ls+0sf3XzbX/h/iqje+NvMRJhMpSNdr7vvba5I4Pl956nd9eh0O/1DxY/lvczXKoNm7y/4v93bWPqviJ2jR3mYq3zOy/K1cNeeLnjkFtbOvzfL9371Zd94svW3Qo6u/wB7dv8A9WtaUcDUlyyPPqY/llY6PX/EE2353w+7564nVPFFzud98OPu7f4t1UtW8SujN51yu9v7r1yl9qzztLDDMqn7ySfe+9XvYXCy92MkcGIzE2pNc3SNc3L4Xf8Ad3fxU/T7pLiNn3qvzfeb/wBlrkpr2ZW2QuqKvzMv3t1bGm3k0j/I/mps2o2zbXrewjTieX/aHNI7OG+huoVT7Mvy/fVv4lq/a6gkeZHTytvzbWTcq1zelyTeX++uW3b9v3K1luLqTcnVt38X92s6lGEYF/XJc3NI+kIdQeSRHTdsV/7n3lrQhkST95cou2Nlbdv2rXDWviCaOEO/mOjPsSRm/eLWzp/iAyTfutzRrxukf7zf7S15VbByPbw+Mpcp2NjdObjzvJhd5v8Almvy7V/2a2LWRLdmk35bb8y7N23/AGmrkNP1q5dv+PlVWNvvN/DWjY6lbLIs2xk27v49u5qwjhPetLY6Y4vqzrIblLqM3CQxu6p/47/C1VppJWZzbNhmVm/efdZqrafqELfvPtmw/wDLWqV9qz3Tf6HtUSfdaZPmpRw3vPlFLF+7qUfEW+FWzMrlov8Alp8vl/7NefaxJ5Nr5kk292TZ5i/w112qXjtepO/l+XH/AAt/y0rn9WgSWGSOF/MCuvyx7Vruo4flPNrYiMpSZwesWsMl0z+Y37yL5N38X/Aa5rWNOQRlIbZijbmdv4d38S13Wp2e2Ty327V+Xy2+9/wGufvtPnWTYifOzs37z7telGjGR5NaS2kcLfWqeXl+GX5tv3WqmbflEhRc7d3mL93dXT61p/2xm2Qxuyt97Z96s0aX9on/AH0PzRv8+19u1q7Y0Tz/AGkuYk8O26bd95w6/wDj1dVo8CQzfvkY+Z/t7flrJ0fT5ftHzpy3zbfvMtdNp8KW7ZebJZsrtT5drVjWw/NO5tTrRien6CVT4a5hQ4FjMVU/8Crzu786Vvtlzt2/KrtIny7v9mvR/DP/ACT5MNn/AEWXlvq3WuN/s3zMJC6hfv7mT5a/X/Fmk3kuQX6YWP8A6TA+yz+rbC4N96a/JGVHap5i+cjfL8y/JtVv/sasLN/pMW+bdGyfLGv3d1LNYTNMtz9pVnVNvzfe/wB2mLb21r8m/wCVvk2/7W6vxGpheXU+a+uTHTfafLmlRGQLt2M33W/vVR1C+hWH7MHb5X3KzfK26rF95253SFX2vtl3P/D/ALNZWrSwq+x0Zzt/5af8s6qnhf7opYozbr7ZIpSGZdv3fm+6y1HY2s00n2Ysyfxbf7tTxxwwxvsmX+86tVm10+2kk89ptkzRb9rfdrf6qowI+tHMeOmgs7H7Nv3vJuVPn+avAvHGmvZ6hPbdXb7+2vZfih4mtrbXrPRPOjQR7mdpP4mrzL4hx2010LxJty/eZY678HTjTieRjcQ61TlPOILx7Wb+L+78z1T1qZ5GD722t/CtWNZmh8xnRPu1lX115kY2Phdv8Kferq5eU54lO4m8z50+U7qpSSPv379u75qmvN67kfd8v+zVCQ+Wdm9tqtSFH+Ukm2Mx2Ozbf4abHEWX/b/utUDSN5Z2fK38fz1Pp7edJ9/5v9qnGRUv7pXkXaNjpwr0zenmBNny1b1W0eNVd3/2flrP+dGHyUviCJJJb7t3l/NVdkZD861btZOf3xxVqS1SaFUoDm5SrpOsTWVwm58p/ErVtalp+la1Z/abOZUk+81c/eWZtmHerOl3H7l4XnxVRlylSj9pFCaF4pWhz92ihv8AXH+KijmNApsnanUMN3WpAVWx9/mpF+Zh3FRqu72pyBOfn7f3aCZbkzK6MPN5Vvu1EXOA3y4oZn27KYx+bPpQSDH5s+lNf7ppzL/t0BS1BoD/AHjSUUjHA4oAWt7wDIV1FzvxtXdurB74re+H7/8AE48sorGRNvzUES0iehra7bOLhtrP96qV9bpHNvG3C/w1oyXUMdr5OzezP8i/3ayb5nf7/wAzM9Bzx00PVf2EFiT9qHQvKxg217nH/XtJXu37ZMhh+IOlzl0GNGAjyuTuMsleA/sF3DyftU6ChdTm0vdwXt/o0te8/tooJPH+lh1ZlGjjAX1M0lfseGbj4D4u3/QUvypHBiJ/7RfyOF+HSwXPiK0e5+ZvN3bdu77tf0Of8EmNF8WP+wRF46+GTWf9t3sszWrasVSFpFXbGq/3a/ni0OH+w7q2uXfyp2dd0bPtVVr9ef8AgkZ+1Lovw5+DlnpX7Rmq3lh4It5ZLiy1KO48uO3ul+Zl2r975a/FKWIq0o+5ExjThKr755/8QP8Agop+0V8XNU174aeJ/A1jd6w3iCazv7e6vGVrdoW2su6vyP8A20virJ8YP2zvEusJCttbaWy6Xa28b7ljWNfm2t/vbq/XHxB40/YM0z44ax8e9N8bX1zDea9qWoy2MkWzdGysytX4h2mtW3i74j6/4th3GLU9burqBpPvKskzMv8A47XoSceSJ14eNRc0pHTxrlvsybXP95VqSNblbxETckX3tzfxVNaxvGq/PlW++1S6bp/2zUmkfbu/2nqfdLlGMT9LP+CEeqXLfFDxLo8MO3+0PAcyyqv3ZFWZfm+Wv0R/4V3c6lceYnmBJIvmj2fdavz+/wCDeNbCH9ojW7C/v42iX4fag3k7vu/vFavr39p79udPDX2zwB8FvLmvIf3V5qkafu7fcv8AC38TVvLERpxPGrx980f2hv2mvAH7MmkvonhLTbfWvFs0G2K137Y7P/ppNXwX448ZeJPHXiS48YeMNYk1XU7p5HuL6R9yx7v+Wcf91a1PFFxeXuoXGpalqsl5f3G55by4ZmaRm/2mrzjxJ4iNnILCwm82Xdu+98sa/wB7/ar53FVp1J3kClGXwnS/axD4WlvmXaI7WR8DtgE188+MviBqupXFxbWyKieay7o5f9Zur3eOaeT4a3MzMryHTrg5HQnD182yxpYyHzkV32bmj/h3fxV+veNMZSyPhtL/AKBI/wDpNMdpOSsVF0r7Urpf3O2JdzPJC275qp6tfW1vG3kusSLEy+X/ABNS63ryWy744eG3bI9//j1c3q11NJbx3+pIrK3yo2/btr8Lj7vum0Y8xl+KtecWro77Itm7az/M1eF/Evx0+r3j2NmyhF+Vttbnxg+I3nu+n6bdNu+622vMCWLfMcmvYwOFly88z1cLh+WN5BSMueRS0V6vKd4UjLnkUtFSA2L79OpFXbS1XxAFPt5HjkD/AO392mUm4qwokB3Xg3XHjm3u+dv3FWvTdP1B7yEb33btv/Av9mvDvD999nuNm/FeqeDNWeaNETafn/ielH3TmqROh1TRzqlk3+h5K/xf+y1k6bCn2O50yb5PMRo/ufw12tjJItizvt+b+Gub1zT3t77fZ/IG+Zt38S/7NXL+6KmeAataGw1Oe06eXKy177/wTr+H2s+K/jta63bR4ttLs5rq4btt27a8d8bacbnxncw2y8SOrbq/QX/glD8GrCL4S678S5kbfeaothYfL8skca7pPm/3q8/Mq31fCyZ6ODUZ143PRpPDMdrbx74WYb13sv8ADVy3sZrSGSZJt6/3VT+9XoWoeDXa+GYY1XZ/D93/AL6rOm8P2dqpt0tmMi/LEv3lr42o5z5bH2mHnCx5V4k+HngnxJH9m1Lwlpt5u+aVri3Vmrz3Xv2T/gVqrb4fAclqzbt7W9wyt/3zXvl/oLqqbLZUSN9u1v7v96ua1rTYYbh0O6Ir/DG27d/drSjjMQrxUth1MDhanvOJ8zeJv2E/hdqf7nRPEmoWMn8XmKrrXlnjL9hnx7pe+fwxPb6lEqfOqPtkZt3y7Vr7M1DTUt5GjdF/22X+Kov7Ff8AcokLI+zd5n97dXVRzTEwd5S0PNqZJhpS9z3T84vFnwk8eeDLw2fiHwreWx7eZbttrBk0yeFtkylTuxX6dT6PBHIXvLX7RuVfluolf/0KuW8Qfs//AAl8XGVNb+HVmC3zy3FunlSM27+8texRzilKPvHm1Mkr/YZ+dL27xln2fdr9F/2fQf8Ah3GgPX/hDNY/9Cuq838YfsGfDfVpJpvCWvXmnPu/1Nwu9F+X/vqvbfA/gC58C/sXXfgBrlJpLbwrqkQkj+628TsP/QhX7h4K4ujic3x/I/8AmGqf+lQPe4TwtfD4yv7Rf8u5fmj8vyMd/wAqGXdir13ot5azPbTQtvjfa2KgksblIw7wt/wKvyc+GUkQUU9oXU/PTSpWgsb/ABr9acu/HFGxvSjlTQT8Qd/nzQp2t8lJTQS2aCiTzvL+6cUskzSSM/8AepjDd1ooFyoVvmYmkopeWNBAsmVfikX5fn2Zpu75sU7+D8ar3TQX5Nu9P1pJm3/O4o/hLUYVvvmjmARVfvT9ybt1MBxyKEVzUi3Qr/eNCt/B0/2qMfwfxUHIBWq+EXMxY1zz61d0nWtY0kv/AGbctGZPvtVEsW60cqakSjzF/UtZ8Q3Ehh1DUpnPdTJWfuPIY8/3q0bXUklhFtefNt/1Tbfu1YXQnvJPtNnfwzIrfxPtb/vmiPILm5TH+8n3/lrY8OafG0h1K7Rtkf8Ad/vVfjsfD1nb+dqUMbO3/LOP+9UI1I3G2GzTyoV+7HVSJlItWcj3UzS/wt9/5614dn+p34+WsjTV2zfcU7f7tdFY26SR4RMt/tVUfeI+E47xlvWSJN/zL8tYVb/jtUjvhGm3b/s1gUG1P4TqfhfavJrC3Ozcq1+gn7Q9m17+wXdWi9W8LaZ+jW5r4K+G8f2azuLx32BU+Rq+/PjBcRN+wv8AaZMFG8KaWevqbev1zwufNlOd/wDYNL/0mZ9dwt/uuP8A+vT/ACkfm9d+H7yFm+T5f722qhW5s5G+dlr0aSOzulKeR/uMv8VZF54XS53ZTYrV+S8sT4mNSX2jC0zxLcxzLmb/AIE1dr4f1hJsbHXaqferi9Q8M3OnyF4UZlX7tLpOoXOnsu+baq/7dSVKMZHsdvdQyWYh343L/laqX9tYXUL2bvsX7q/3qxfC/iK1kgRLl1Zv71b9wvnfvkO7zH+Zv71ZmXwnNeI/2hvj9baTF8MYvjV4sXQYbhZYtI/t6byEkX7rKu7+GvozUv2v/wBrf9pb4S+Evgh+1L8Zda8ReD/DN59o8L6PcN8vnN8qyTMvzS7d3y7vu18vfEbR3juItbttqmNvnr9lv+CMvwF/ZC/bk/Yh8SfCXVdEtbbxjpOrW+o3HiSaJmlj02P5plX/AJ57fu/7VZVYxX90qpz+z90+Bv2qPhH8N/hH+yroPxOsPiFZt4q8QeI5rVPCKwN9pt7OFf3l1N/dVpNqr/er5T8AWV7f6u1xbDLj59tfv3/wU2/4JZfsjXH7IMfj7TfHepa94r8RWi2HwqtrOz2NIy7Wbf8A9M1XdX5z/sT/APBJP4tftDeKNUs/APhaS5n0fzP7bkvt0UFuse5mZmX+FvLatqco0qW9zjhWlL3ZqzPn2z0/UtLUQXkLIZIFbaybW21TtdD+0NI/k7R95K7/AOOXxWtvi58VG17SvAum+GNP0/S4dI03w/pbsyRx2+6Npmkb5mkkZWZm/wBqsfR9P/0V5JkUFn+796rjrHmZ6OFlzfaONk0HypPnf59/92o20ncrOm7d/u13lxoaIp875Tt+Vtv+srHk0J45G+Tb5j7nXdVxjyyNKn8pjW0bwrvmf+Kte1mfzN/+396mR2KQj54W+ZPlX71TW9juk+fdtj+5urblhI8mo+SoaMOobV2O+1f9n+GvoT9i68NzZ+Io2X5o5rYMfwkr5yhj2szp1b7m7+KvoT9hwyHTvEhkj2/vrX+Utfo3hNC3HmFflU/9NzPruCK3PxFRX+L/ANIkeX/GvWZLf4peIAjNui1WfP8Au7zXLf8ACWPgDev3KvfHNj/wuDxKqO2H1mdX/wBn5zXGMrxtsRMqv/LRa+Gz+nH+28U/+nk//SmePjakv7QrR/vS/NnRx+KppFCPCrKvzfNVy18RbrlZt7f3nrkFun8zZCG+b5mkWpIb65X99vZVVtrL5tfOVMPGXMXTxEonb2/iZI5N6TMFbcu7dU0Pi5BHs85TtfburjYdWRWT54/9U33qgTVJFjXhf73y1wVMHSl9k76ONnH3Tum8YTNIro7MnlbX+ek/4Sgbhsm+Vv8AvmuHhvnaUoX3M1WIdScrseZlCv8ALuSsY4Hk91HRHGc252MniR5FSbepC/f/AL1QXeuPNb/J8jN83365htYRoh5Zb5n/AOBVDcX03khN+fn+9V08HGOhz1cRKW5qahrEzfOdr/8ATRv4azrjVHuJNnyqf7y1Ukn27nRlLL/tVVWZ5Nv3t396vRp0fsnDKtOJoW949w33N38KyVv6PvjjWFNrrs2v81YGlwu8ez+NvuLXQ6LDcyPskhwsf975fmrSVP3TONSR0GnrNHsT5l+T51atu3t5lZEhdkOz59v8VYmmvcwxvDcpGdz/AHt/zVt6WzwyJNtY/P8AxfdkWuSVP3veNY1pHpl59pi2TPDsWTds+b5asRatNZzb0vGEWxWZf7zVl3urL5LI7qQy7kZU+7WXHq03nB4X2lf71aywvMdMcVyneabrX7tLlIWU7922Rvu/7VdFa6pHcxpN52/zHZXVfvLXmtjfQ7Yt8yt91tv8P+7XT+H/ABAkbfO6yRN8yKv3VasZYOPNsdMcZLuegx3UKrG7vIjt821f7tQ3jJJ87ybGV/k3P/DXOWurQ3O+Ge8kd/8Ad+6392lvtedo1SF2jf8A2ko+reRtLFR5CzePNqcnk+dt8tdibn+Vqz7y38uTGxoj95P7rLTmkdfke53Hb87SJ81VtSuP3aQw3KttlVWXb81dEcP7pySxRl6h53mHydv+q2/vE+7/AHax9UheFUme5Z/MTbtX+Fq3bmPzI5p/tPzq3yrWXNbpNcNN++RGVdnmfd/4DW9PD+8ccq3Nuc+ummZYv3KruZtjb/lamx6OskpdLPcf4/n/APHq6q30NJm2WtnxHuVvl+7/ALVX7HQ0hUbE3mT5Xk2bflrtjRgc/tmcjb6Pcr+5hdgVb5Nq7a39Jt3sU87e29Zf9X/z0XbWzb+H42f9yFKRy7dq/wALNWja+G3VNkkPm7X+fcn3v92j6sP6xE1tEhCeDBDjy/8AR5OB/DktXKeSkO9Emk+/95vm213QgZdLa3XJPlMB8vU89qw7rS/LjmfYqPD/AHn21+s+J9FyyjI12w0f/SYH2nE82sHgbf8APpflE5iSFGk3p/wL/ab/AGqpXCw7rgwpz/B5n95f7tbuq2qANND5bI332X73+1WDqUbyQumyNx8qxbXr8g+q9eU+O9tEydQv3baiTqHbd5/l/wALVkXF1iJcw7W/3q0NUmRoTDCi7V+aVl+X/drCurxI/Nd33vtVVVvurVxwfu+6ZyxRZtbhIZWjeCMrJ825k+7/ALNTLI9nDJePCr+TFu2/8CrPs9Qti62z2zD5FVlb7tZ3xO1qHS/Al68LtmOJtskf3l3fLWcsLOMveia+25jwD4tfFRNY8aaleJNytx97d/6DXOyePH1SHZ526ua8RL/rZvl3s/zN97dWPZ6pNDIfkqIx5TG/N7x0V9Ik1wz/AN77/wDtVmyfM4R/4f4akt7gyw/vPl/2v71RXi7tkzvhqCOWERk2z7jjlv4azry2dlb+9vq08iNMu/buX7lNupt3zpD/AB0ehcfdMqQJDnKfLup1vcOs6zBcU6ZnVnKbQWeqzb1X7/NOUh8p01vHDqlnwnK/wrWFdW6WuYXRlP8ABV/wjqyWt0IZn4Z60fGWgzW+L9Ifkk+b5aRPwyscuY2jkHzZ/wB6tnSbX7VAUf8Au1ntC9wq702lan0uR7e4/efdoCQzULWaGMpv+X+Cs+OTy2ztrodZVLi23oi7dn8Nc9JvWSguPvETM0jk5pVXbTU6/hT6qJoFFFFH2gClVj9zfik/4Bmj/geakBd3y7aSikY4HFXL+6Am3b82adRStyu+lEmQlFFFHKUFbfgWR49aV0P+zWJWr4P+XWEcpkrUkVPhPQ7xnaNfnX5f4l+8tZdxdJGp/c4Zk3VoXF09yqwv92sHVJsK3yYXb8qs9X7kTmPYf+CfCNd/tU6TM6bRFZ3jr75t3H9a+jv2sLeF/iRptzJGCyaKNrHt+9krwL/gm7pQk+OtvrzqAWt7hF+bn/UvX0L+1dOIvHGlqJGJOmgmLPGPMf5q/YMNb/iBGMt/0FL8qRwV05Yj3TyLxJC8MUd4j/3W+9X15+xPrz/FD4I3/wAKL/VY47j+0pEsFklZlVmhZV+WvjvxJvvf3KIse1NvzP8AK1dv+zX8Vrz4d6pczQ3LM0d5bzrHv2t8rfw7a/FsLU/e8pnLllSNv4sWHif4I/Cb4haN44SO31fT9BuINsifLM0jeWskf/AWr4x+FUDx2jFPn+X5fk+7X6lf8Fndc8B+Pf8AgnHo3xpsIoU1vUtcs9L+0Rr800bbpJFb/d21+ZXgSzSPTo977N33l/iruqRpKXuHXhuaOHXPudXu3WqfPtZv/Hqm0d3XUndtquz/ACf3fu0kCo1vs8nC/dWP+Kn2sKW0YmdPMPm/KqvU8oe9sfYH/BK/Xtb0n4vanqWg6xJb3Fx4PuoJWjZlZo2Zd3/oK19D+OL618LWLPcvJmTc7t93ctfJH7APxCm+H/jjVtYfSftzzeHLiCC183aqszL8zV6pr2tar4y1I6x4nuZEaTa3lq/yR/7K15mOxHs5csdzzsRHm1iS+LvGl54g86bSt0MX8Ks/3l/2awk0ua4maNIcK2399/e/2aluLqztbf7Tqu1FX5ov723+7VW61x2sRc3k32O1+bZDt/eyf3dteZ78Y80jKNM62OBYvh1dW4IAWxuBkNnH3+9fLWueJvPZ7PTX3FX2vJsr6U07UIdT+Cl1fWsTQq+k3YVSeVwJB+fFfLFx9jtYXMyNmP5ot1ftHjRJ/wBh8N2/6BIf+k0yo6Fa8W2sYftNzNu2y7v3n8VeT/F34i+RbTQR3Pzbm2r0+9XRfEzxtbW9tNsuWRF+b5v4q+ffFXiK58R6q9/NwD9xfSvxjL8L7T3pHrYPD/bZUurqa8uHuLl8u33mqOiivoPhPSCiiiqjsAUUUUSkBc0+GFoi7puqO4sHj5TmptKu4rdZFuXONvyIKn09od3+kuoH93dWMvdkZe9GRlEbOGGKA27mtPVI9NkuGENyr/7VUprN41zvX/gNVGXNuacyGwSFJg6jNd/4C1aG4u0R3+feu35K88VvLf5K2vC+ofZbwfPj+41XykSifQWm3yfY98zrtb79YXibVPtEMiPeKnl/dXZuZqoaX4ge40N33r8vy1zt9qzzTtvdh8u16XNzHPHmiZGqNCNQa837ZVT5GVPu1+0v7KvwR/4VD+yf4F8AfYNlw2jR6jfyRr964uP3jM3/AH0tfld+xv8As6ar+1Z+094P+BuiOuNW1aN9SZvvR2cP7yVv++Vr93PE3hu2jmfR9NRktreJYLJd+7y4412r/wCOrXkZpK8LM9HAy5avNKJ4dqHhPzlbfu+X+FvvVjXGkuuIURQ7N8jK3zV6zrmivbzbERU/h2q3zM1cjq2g7V4hz/F935q+ZrSlGWh9RRrR+KJ5jr2n+ZI8c22It8u2T+KuK8QafCzK6eWHX7vl/wB3+7XpviTS7xZNn2ZRD935vvNXF65a2yrLZwzQr/DtX71cUf3nvLQ9iniPaQOEuLOb7Zvj2lZNzbflpq2P+tDvIrLKo8uRvvVoapa7djw7d6uyxTNF80f/AMVUEzIsaJMjGRdv7xa09pCUrlyjzRuV2s/uwvMrsr/uvlpF86HzIZodq/xs3y/N/s1ft5I2khTydpX5d33adJavPuNzeK4j3bVZ/l3VcanLuTKP8pg31rPJHhLZt2xt7ferY1hFtfgRq4hHCaBfED32SGiHT5rq3GxG2/eZWXarVo+JrSGT4V6tZiIRpJo12pUdBmN8/wA6/oDwE5f7cx7j/wBAtT/0qmd+Uc/1ivzfyP8AQ/Mbw34Xv9a1p/tkLHdL/rF/ir1vSfhH4YXSnm1iwjkTytyNt+7XXfDv4V6bp2lrrFzHH5S/N8y7dv8A8VXK/F74hW2lrJbabc/d+Vdvy/LXwq5IrmPxv35zPLvil4X8Daey/wBlWDRP/Ftf5a8/lsUWT5Pu/wB5q1/EGtSalcO/nMV3/wAX3qp29q903mCo5uY6I+77pUh0ma6/1Kfd/vUv/CM6kq7xDuFdLoul7m+40qfxNWtdR2dpb796jb8q/wC1VcqJjLseezaTc26/vrZh/tVXa3f7ipXX6xqkNwGTYrLWRb29t53qzfwrUy/ulRqGMUfhKVY2YZH92t9NIs2/1iferRtdC01o13w7lp8oe0Zx6283UJTvss+MeV/wKvQ9N8M6JcYT7M3/AAGui0TwfoMMqv8A2bDt2bd01HKTKsePx6ReTfchZto3fKtOGh6kzbPscmf4dy172sem6XZva2Gm2+1vmdmiXdWKuh3PiLUEcQ72V/4Up8sQ9pI8butJv7OPzrm1ZV/vNUUaxPJhn42/3a9H+MmgpoukxLs+fdtZq8+02DdMsv8ACv36g15vcLdj4ZmvId+9VH+1TL3Q3sF/1i7WFdFZ/u7Mv/33urC1y53Myb8/w7d1BnGU5GUW2sSetM3O336c4yd3rTaDaIoYrR5jr/q3pKKuMSiSNsHe/wD+1Usb7W3pxUC71+THzVL87Y+7/utUGZMD50gff1+/VmE/88+WV6qRqi/f3VatvNZgifKy/wAW+jnIlH3jc0k+Wy70+999a6Cx2La750z/AH1WsDS5EmZP3e7+Gt6SRILAyOmAqfJt+VmoEcL4yuPO1Zk/hWsqJPMkEP8Aef71SalcPd3zzP8A36seH7f7Vq0cPbfWsTX4Ynaw2b6L4RZF+9JFur7c+PErw/8ABOYyxk7h4L0jB/G2r401fUbbTbeGzdG27fusvy19q/HuzOof8E/ZbSDjf4Q0vb+dua/W/C582U55/wBg0v8A0mZ9bwmmsJj7/wDPp/kz89tH8WTW6t9pfctdTpOsQ3UKO/zL/tVwl/ot/p8jJMjUyx1K8sZB87Y/u1+Pnx3LGXvRPS2sbK8Uokasuz7tYmreEUjj3pD/ALX3ab4b8Xoy+TM6ru+V2rrPtFtcQ+dDt+593furSMiLTOK06P7KyTRpg13fhnU4bixa2mT738X92sfWNH3Ik0MOC3+zTNHknspt5mYL/d20EzNfxdpfnafKjorBk2oypX0d/wAEN/jI/wANv2vPD/hjXvEOpW2i61fx6dq1rZ3TItxD97ay/wAS7v4a8EvJE1DTVTzsPs+638VZPwD8aXnwk+OGleKoXxLY6jDdRbv7yybmqJ04VKckKXMf0QR/tP8A7HnxW/bE0fwfqvhLUNHtPBeuNomh2eqaivkQ7d0lzcNH/CzNtVa8u/ZO8FeLL/4qeLPA+hftAar4N8NeOfEN5YX8mjxKslxp7TNtVWb7rMrferxj4nfDvwNJ8dvD37QmleNtJ1uHx9YTa59jsZ1Z9L8uNdzSL/DubctdD/wTh+JXh74+ftHRaJrviT7NYSSzNpax/K00y7tu5v4V3VxYiE48vIzzuWrWxPNLSx8bf8FZPgN8OP2cv+ChXiz4QfBjw5qFn4Y0XT9PTSnvl3fa28v99cK38Ss1eS6DYpJpYe5RkdXZWX+Kv1Y/bB+FPw9/bq8B+J/iXr2jx3njj4b6yunf2Lotwvm6lp8LfvJPMX+Lbu2/7tfmNoWr+G/F2paxqXhTw9Np1guqXCWFjcXXmyxwq21VaT+9XZGp7Slc78vlKVfkZl/YYZo2CQ8R/N+8rP1TS0ZmSBP7rbVrrG01GZN/7oqitu+9UV1YpcKr/ZmJX+Ja1jL7J21v5jg5NNmjbfs2/P8AJHt+7U9rZhd3nPs/irdvtLmjnPyb9yfMy/dqFdNhhkbzoWKqv3lrqjseLUqe9eJgLv2h7ny9y/L833dtfQf7F0AgsPEKZyfOts/lJXiq2KyZQ87k+9Xt37G9s9vZeICxB3SWpyvTO2TNfo3hR/yXmF9Kn/puZ9RwGn/rLQb/AL3/AKRI8K+OtqW+LPiTK5Da1Oc+nzmuJaPy12b2/wDZa9F+N1u0vxT8RyBE2rq8+5j/AL5rh7q3kVNibflT7zfxV8Xnn/I7xX/Xyf8A6UzxsdUlHMa3+OX5sypGeHdvRt38FMaQMp2bdy/eq59nuYY13ybfkqvH/rDv2/N97an3q8XlkRGUSLzkXr87LQziMN5O13k/h/u1JDbuyum/bt+41OmhRsOm7ev8TfxVyyjyyOynLmhzCQtNHGvo393+KpVuMQ+fs3M38NFrGkakPw33qGhRZEhO4q3zbv7tZSidEZe6PkuNq/uU+VU/h+akMjyN5+9fm+VPmpI4CqnyduPu/LU1tp+795sUfxbVWp5UORDHHt+d92V+6uyrml6XLfAbE+7/ABVYtbOa4m2eR975dypXXaDoMMcA/iXZ/c/iropnJXM/SfDLy5eH+FdvzfxNW5a+Gd02xJmlMfzL/vV0nh/wpDcSfaPI4+8i7P4q6Gx8IpNGNiqrt825Vq5ROL2n8pxNtotzCuzyWZv4NqfdrVTT5rfHnTbGVd3+ztrt28J39q0bpbMzNF83l/dqhfeEzGrzOkY8v7qyKzfM38NZ1I83wm0ef7Q/Vmv2nZ/JXDL8/wDdrAmv5vtR+dcbP7ldHfRzNDK8xZdz7drfw1y+pQw27fO+/d/dr6GOFhyeZxRxUuYlh1Y27Rpsk+b5vM+981bun695duNjt8r7trf3a5FZ0hU/eR/lVGarSXUxQIn3l+bctU8vjL7JrHHSjqd3/wAJQ8jb0mj3qisir/7N/tVaj8SPN5rpc79qf6v/ANmrgIb+ZFZ34M33G+9U32zYzb3xIrrsVf7tFLK+aLsVLMLwudxD4u/1aB2Zf4/Lf5m/2aY+oPIrOZoV3P8AdkbbJ/vf7Vctb6gLrbczp5bt8rq3/staulrHFL/pO0q3ypGv3lWtP7N5TL69zGwtwt7NshRQ/wB1Wb+Kpre3uVki865Vw3yvCqfw1Xt7OFfK2O2FfcjN/eratbNftQtpnbH3mbZVrL+U5/rnvF3R7GaSaP51bb8yLv2tu/2q6a10kqwhd42f73yvuVd1Q6Do/wC5aZ0jZF+42z5ttdhpGnpax+TMjNFJtbdJ96pjg77DljOWPvGHH4bTy2eSH545fkbyvvf7LVch8PzCP98jf6rduj+6rf3a6L7HDt8mT5n81fKZv4Vq4ui/M7wou/5vmaqjQ5Yk/WOY42dJHvjHMcMzgHd2qvrGk7W3w/N5i/e+8u6tHVIjB4geLptmHJOfTmpdSsYY9nkuz7tzMv8AFX6n4h0efKcnfbDx/wDSYH3XGOI9ngstfeivyicDrFnthz9yJkZX/irmbyHzIf3G4bk2MzJ/49Xe+IIf3a7EVdu5tq1xepxvCGkd2Mrff/dfdr8zp4fsfC1MRynH61b7pD+52IvyszP97+7XPX0LR7Xd9y/KrqtdZrVrumaHyd8ez59v3d1c7qEbsySG23fPt3bv/Za6Y4HljZRMI4iXxGX5EzKz72Rmb71c18Wle78NzQw7R5n3t33ttdXtuftHz7T8nzR/3a5P4sSbdPTZuiPzfNs/8drkzHC+zwrkduFrx5uU+bdc0+2maVC/3Xrm7yzSPc6bcLWlr2pPJqUqu+G3/dWol/fJsyuG/wDHa+U+LRHpR+H3inDK6qr7FVVT73+1VtmS8gYJJudv4qimtXDfvCxVvl21CsgjkRNjfL9xd1OISiQXCvHNs2KV/vVG0ybdjp8q/dapLp0kLbE/36oXk7x4kR/mqvcCN/hLMkL3C5jT7v3WqpcQtGuzHzfxtSR3jxYdDy33vmq1HIky7+rf3TWZcpcupnQsYZN/da9E8G61pvirRZtB1P8A13lbYm/u1wd1YzIvnJytO0fVbnQ75byHcpoHpI0tU0m60XUJLO5Rl2v95v4qrTQ+SwdOVZK66+jtvHGjjVYfluY12s33a5Vle1keGaRsr/C1HL9omIlrcZj2z7v92s/UI/LkLp93/aq1eSJuZ0T/AIFWfM+6TO/5auMiojA27mikVdtLTNQopD8vz4paACm7dvzZp6feFJU+6AUU3P3aU/N8maIgLRRRR8QBSMueRS0UcoBWr4PV21hNj4rKrT8J7/7VXYmSv8NSKXwnaXDItqPm/wBZu+b+7WBrEm3ds6/3fvVt3kjrA0f3VWsDyZtS1aCzhhYmSVV+WiX8xgfTf/BPOzew+I+hRykF547uVyOx8h69p/a0Rm8daYf4f7LAf2HmvXD/ALHei2lh8VNLa3UKkdnKEQptKt5Dbq739qtW/wCE+0uQu20aV90DOT5j1+xYGUf+IEYxr/oKX5UjyZ1IuvzHjmvW8ysiF1likT5F+61V/BNi9x4otJtNds+btbb/AOgtVjUo7/VNSWzs0x8+yLb8zV9Cfsm/sm+IfGmrLPbeFbq6upmV7O3t4tvzf89JP9mvxXC0Z1JmcsRClE8k/wCCkPxB8T2/7MPw8+C+qQ3CQXXiKbUovMf5f3cfl/8As1fPvhfENnDshVVjT71fUv8AwXD8Dn4Z/E/4X/DfUb9brU10O6v9S8l9yQtJIqqq/wDfNfMuixosaJD86Lt2K33q7uX3z0Kc5OlC5u2ph8vfNMzD726lWZGhEJT5v9yrvhnwzf8AiTVLXQdKhmuLm6uFjit44t25m/hWtD4lfDHxn8J/EX9j+LdK+zTb22x7lk3f8CX+KnGXKV9s9K/ZT/c6pfzQtGv+i7d0i/L/AL1e1LeXOrXDw6UnzRvteaZPkXdXjv7JOm22qXmow38MjpHbrLKv/Avlr1zxJ4qs7O4/srTYI43X7qx/eX/erycdKlGrzHl1pctWxFq1xYaAN7zfabz5l/vIv+6tcT4k1C8EM2sPeK00MX/AF/3a2vst1cyb7y8VFb5vO+9trkviJqT2+mw6Vsxudmlrx61aX2zHm5j1HwTI0n7OrSzRk7tGvSUz1GZeK+QPGnipY43s7ObcjfMzN/DX1x4PkD/syzOjdNBvgCPbzRX54fGPxzFYPL4e0yZmuZPluJP4VX+7X7v4uUJYjJOG1/1Bw/8ASaZ1YajKtPQ5n4meNn12+/s61uWe2h+Uf7VckuMcUrAt1NIq7a/LKNONOHLE92MfZx5QVccmlpGOBxQrbq1+EsWiiinHYAooopgOjj8yVUP8VDRPtZ9mQv8AFTaWOR49yJ0aswEqSGbayh32rUdFXyoCSaRGbeny062nMUoZRwKhqS3jfd/s1ApRO+8G6w81q9tM7bWT+H+Kq2qXjx5m2fd/u/erG8O6klrJvmfb/do1jXHmm+5xvpy90x5T6p/4IveOx4O/4KZ/DCXztg1a7utLn/3ZoWVf/Hq/cjXtBSx8+wSH5o5WRlm+996v53/+CfHiF/D37c/wk1p5mZrfx9p/zL/tTKv/ALNX9InjSzRdW1ATQsrfapG+Zv8AaryMdR5pG9OpyxPKfEuj2d0r+TDJCy/K275mWuM1aGGOeZHTcsfy7fK+98v3q9J8Sectu0bzMrN/F/d/2VriNUs90LTWz5Xyvn8z71eJWo8vuuJ6dHFcu55T4is5o5Hh8nasn/LST7tcLrlgm6XfDsdflVf4f96vUfFFsk0jpH5ibvvs38VcJrVrDDHNM7/OrfeauPlpS91Ht4XEcx55rFrmN8vu+8v91qobphGjzWfKqvy/xNW9qlrNZ3H7na+35fmbcrVlSWsLTJN5zLt3fK396sp0+V2jHQ9eNT3SrDG87SwzJHs2723L83/AWq3Z2/mKj9WX5vu1Fb6f9okea8RRIz/JtrWhV1s/3MOdvyvH/dq+WMpxM5S5feD+z3jkRJvu7d+6NvmVqZr8DL4K1GDdknTpwCVx1Rq19Nhdlj+Rc/3tny0zVLe1eGe2UEwtGVwR1Uiv3/wGp8mdZg/+oWp/6VA9LJKntK9Vf3H+aPiDWvH02n6HPps15t2ysGjX7qt/s14D441681a+d5psru/v16/+0xbw+H/GV3ptnbLDFM7Mir/vfNXlFv4dutQk3vbKV3/xV+e017SlE/JqkfZ1ZHJw2M11J5wh+X+9XQ6XoW2Nbl027W3V0Fv4ZsdN3b3Xev8ADWZrmtWdirJDNg7PmrYz+IS61CHTV2QhQfvba5zWNceRzBJNz/e31R1LXHumd0Rs7flaqLfN87/e/wBqlzcxUYltrhPMCI+fl+WrNv8AOo2J8/8AG1U4Y3kkCJ0rW03S5ZtrojZ/jqOWYvhC1WZhv2fL935q0tNXzm+dGVd3y1Nb6P5G15nY7vvbv4mrQ0+z2y/O6rtrQjm5dS7o9v5arvm/2katRtW8lVd/vb/vbP4qzluraGPZCm5qb/aEClt/y/8ATPd97/apSCXMdBp+nzaq2z77t8v/AAKu60HwnZ6DYia5dd/91vvf8Crz/QfElnp6rNM/zL821XrTuviJc30DW9u+8NubbJ/dqZe9rEOWUuU4X9o7Ura4voLa3m37f4l+61cNoVt8u/yd27+GtP4mX1zqGvL9p+UKn3ah0eNLdWHyk7Pu76Rr8MNSbWr57WFYYXbDJ861zV5MZmxs4/vVf1i+eaT7+Qvy1lSOm7ATbT+H3R04yEc7Dg0jDI4of7pp25NuacTRiUUUA7e3P8NSUOX5m+c4qXzFPzpubb/epiqjLn5s09f/AB2gzJI1jaNX+bP8dW7Pf5nnGNiN/wB2qm5Fj378n7vy1e0xn4Kbg3+1VcpMjf01Xl27/u/e2qtWPFGqJDpJTGG2/I2/5qk0W3O5Xf5VrG+I12rSR20fy/7NOK5SPtnJv9010fw9037VqyzOm7b93/Zrna7X4d2otbGa/k/u7aZtU+Eh8Yapu1BofO3iNdv3/u19/fFuYQfsDRTEDA8IaT1/7d6/ObVm8y/km+bDSs1foh8bWCf8E9N3UDwbpP8A7bV+t+F//Ipzz/sGl/6TM+t4VVsDj/8Ar0/ykfFF1bWGpWrNIin/AHqw9Y8BecrPbJg/wruqbTtVeT/lhs8v+9/FXT6TfR3S4MKlv4F/u1+Rcx8T/eieVtbX+l3DI4ZWWuh8NeLHtYwk3zfNt3NXT+JvC9hqlq9/bKu7+7/FXE3mi3mmt53ksqr92nL+aJftOY9F0vWrbVF8l3yPvbV/vVJqGj741ubbaP4dtcBoesXNjMvzso313Hh/xBDqGIZn+6+7d/epxl7pEy1o9vcs374fKvy7a5fx3b/ZdUhmSFsLPXZTW/kyfabZ2+Z/k21g+NtPmvlivLlG+X5mVaqMf5RS5j7/AP2JZpvin8K/CNnc2cNmNJ066066ks2/eTfeZVkrC/4J8eILPS/2gLGbXrm4g01tUmgezs9ytJuk8vb8vzLtrs/+CWqeAPF37F/jnRPDsN1N4o0nxbp9+8kny+Tp+1vOkX/0GvMvh7eal4P/AGltetvD141s1rq7T2TK3zeSzbttEY81GXIcsoylXPufxT+0T4i/4I+/HHxJ4mb9muC5sPiF4QuZ/Cr6zOIvs8kbMquy/wAWGb/gW6vzh+E8mpapoN9rGq+T9tvr+S6uo4V2xeZJI0jKv93burv/APgrh4y+PvxA+Pvhjxx8aviVqeurceGo7Tw+s4WOK1s1VW8tY1/2v4q4z4I2rzeF5Em2sv2hfl/2lX71c8aMqcbnVhKcadU3mtUaQPM+3cnzxr93/dqCbSkWQ2sXzq33tqVu/Z/Lb50+X733futVaRXt5Hm37tu7bt+63+zWlOPNM6K0uWBy81m7SGzeFfli+8vyrVRdPRV81PufxMtbt8uxdhm/1i/Myr/47UMmmpDMzpyNu3/Zrt+zZng1Jc1W8TBW1hb5ETb/ABOzfw17F+ypbJbwa6FdTmW3zt+kleX3EfyvM+7ezKqt/s16r+y3EUtNccOCr3ELKQMdnr9G8J/+S7wvpU/9NzPq+BJc/FFB/wCP/wBIkeNfGW1B+JOvYTKnVZmdf73zmuKvLFJZk2QqW+Xau2vUfidoUkvxD1qZZdobUpnw3f5jXPXHhmFmV5rZk/utXxmeR5s7xV/+fk//AEpng5jWtmVb/HL82efSWfmQvvjbc3+q/h21VuNN2sg2Ln+Na7u+8LTW43ptdPmVFase60OFgmxPvP8APuryvc+Ewpy974jlmt5lykKN8zfd/u09dPfcnyfL/F838X+7W1No77vJ87au/wCXy/uqtRLprtMYX27925f9quWUT0sPU93lM2PT32b3Xb833Wf5qmWyeNdi7S33ttaUMKRtsSFSv96nQQvGyo6Ns/vMtYyiehT3MtbF5NzQow+T7v8AtVftbF5lRIQq/wAPzfxVLAschZIYW+ZvvMlbml6Wkql7bk/d+aol/KORNoWk+Xb73+7/AHdld34Z8LmT959mjYf+PVR8M6Huj8mdGHmJt3bdzbf9mvV/BvhdDl/J8uLYqPHGnzNWlPkictT3iDQfBrraxQmFmEi7t237tdboPgd2V/MtmH8PmeV96um0PwrDZwtNclvmZdkbfw11lnpNtaqHeHEUjbNuzdtrOVb7Jj7CBwX/AAr/AMxWtjbSb5Pmikj+b5qyNc8D2y5SFN38X+7XslrpNnMrfPvVX2pt/vVQ1DwXYLC8KWzY3fN/dojLm+IUqZ836hZ/Z4wZrZtuz7q1y+uWLrG6PDgr92u81zTXmkaBIcqrs21f7tcdq1uitshTllbbuf8Ahr9F+r+6fKU63LI5Zi7XCpDMr+Z8u1v4dtPWGaFVgdGETfM+1/mb5qdcK8kjwlGYL99tn96pLeGFdltbWzbY12/vK6KeHtC8Tb23tPdHSWaKpdHZmaX7u77tOW1IzN827Z8vl/NSWilpPubhu2/K/wB2nstst2Y4XkKr8u77u2uijh7fZOeVb3CzpNnC0nnGZn8x922uh0mRFmf51+6pX5PmVa5qzW5kYfPuH8W5K6LTWmuE3oivtf5mX5WqpYOUfjJ+sc3unQ6XHtuP3zrtZflXZ/DXQ6fGjXEU32lmO3y33NWFpbIjI6P5vyfvVk+Wuo8OxldkM9tGn/AqwqUYRNIy9w6/wfZvFD9mk2na7Lu/vL/vV2GmWME0KI6SbI/9Uslcr4ZaGH+CTbJF80a/ers9Lk2wo824qu1fmf5v+BVw1I8srx+EuMoyjYuNYpNuCQxuy/xN/eqRbV5IxD0ff87LT0kT7RNG7xsn8P8ADtanIyXFul5M8jHZs3b9vy0uXsRKXKcFr8Mdt42eDAdUuYweeG4WtXWrBGaeb5S+z5VX71ZevqqeOmWNcgXMQAYdeFrb1KTzI2kgTJh+4qxfMrV+nceJf2blKf8Az4j/AOkxP0Hjdx/s/K3/ANOY/lE4TXrW2ms3RI2WSTciq3y//s1x+sXX2NUfZ80e1XjVd3zV3muWsbSOjvh/mZVZfm3VyGpWn2Jkd3Vk2/dVv++q/PqdM/Pub7RxusPDeySzO+X835l+6zVyOpRwNIz7JIy27fu/hrttUj8n5EkmL/3W/u1yuoWb3i+d9mVVZv8AWK//AI7XoYWPxKRnze+Y7w2SyG5fd/Cv+9/tVxfxesoWs4kSFg7O37xn/wBn5a9Alh3TH5GRWTbtauQ+L2nvb+G01B0V0tbqOX/gO75m3Vx51h1Uy+fL9k6cHW5cTFSPkHxBa/Y9Uld3+ZZW30+zZA29EY7vuVvfGbw9Np/iKa8hhbyZH3xf7tc3pbbmbY7f7tfmkf7x9R8RamkO3+6v8Tf3az7r+JML/vK9WbyZEU79y/7VUJpPOY/7X/j1P4ZBKMSORvNC7EVV/wBmqNwok27+Garc33VQPgf7NVmciTZsZqfL7pUSpL/rClCzTR/x4NXG035WkfpVV7dlByPu+tLmNOaMi7Y6s8kohm+ZP9yrl5psN3++T+5/crDU+WM5rqvAz2epI2n3O3zNvyM1EiJR/lM7w/rVzoOobN+6Nn+f/arY1aOz1KP7fpu3Lf8ALOsjxFov2W6KJtG3+L+9Wbbahc6fwjsv+0tTy8xXvDtQV1B38f7NU1+X71Wb65+1S+bvzVb7/tiq/ulREVtpzTw27mm+X70qrtoiULRRRTlsAUUUituo9wBaGXdiiimArM7cvSUUitvbFZgCrtpaKKACtjwWv/E0WaP7y1jK2eDW14Ng3XDzdlq47Cl8Jv6szrCzydG/u1r/AAD8IzeLviBbbE/dWrNOzM33dtc94gn/AHexP4q+0/8AgkP+xn48/aEk1nUvDGgzXO5lt4pPI/1ar8zM1T7OVT3EefiqnsaHMaf7OOnT2vxYsW8ghBDPliMf8smr1jxx8FfEXxs+K2keFvCeiXuqajc2fl2en2EO93k3sVJ9Bz1r374g/wDBO7Uf2e/DJ+J0sbyTWEEcepCdQptWkcRqBjqzFuR2ANbH7LviDU7bxFp+jeGNXbS9TXWVnXUbeH97ghFRN/8AdyHO33r9ryrDxpeB2KjP/oKT/CkeB7R1KXMjE+BP/BInQfhHq1tqX7Q2txprk0S3D+H7FvNntZGb5Vkb7u6vq3wn8PdK+Gvh2Wz8K6DJoVqsX/H1ffNcyL/vLXf+JJrDT/F194kjhuPEmrSOqXV95W35lX+Fvu1558Trrxnr0n2a9maC2k3K9naxNLLu/wBpvu1+URiqceWETJUf3vMz8bf+C3Grf2l+31p2g/aZJY9L8HWbRMzbvmkZmavCNPtXVvPf/lp/er07/gpxZu3/AAUZ8T6VePIr2OmWkT+c25t3l7v/AGavOLOHzpAj3Kr5bVwy+I+ljH91FnuH7JenfYdZ1Pxgk0aT2tk0Fv5z7WXzF/eSL/tKtQftHx22reE7DVU1KM/ZZ18pVl3yeXu27m/vbq5v4P8AxY0T4a6tNc+PLBr3SZE23Edvu3r8vysv97/dq/8AtG/Hrwx8VrrTLDwNo8lrpdnYQpPI1ksX2iRfu7V+8qrUS96pYyjz/Ea37Ndxr32e7s9NSR/MTa0kf+9/6DXrjaVZ6T5t/MitMybt0n8VeVfst3D2y6jPbOq/ul+bzf738Nek3Fwk0j793krF+93fw189mcX9ZvE82tz8w2+ZLiN7+aGN7fY3y/3v96vGPih4y87WpLCzTzdqY8yN/lWuk+JXxNext5tE0GaSG5mX/XKm5fm+WvIPGGpJ4P0ebUtbud02z7sn8TV5nL7afKRTjzep9T+D559N/YzvLuJ8yQ+FtUkRgc8gTsDX5c3d5cahcveXMrPJI2WZq/Sj4PavJr3/AAT4n1iXOZ/CGstz6ZugP0Ffmh5ntX9LeKMFDIuHu6wkF/5LTPZwEeVzXZjg27mikVdtLX46eiFFFFTzAFFFFUAUMdvWikZd1AC0UUUAFFFFTaYC/dapYztRnZ//ALKlmhRbVJg/zf3aYvzff+796jlMx6yTffBw1Cs8jHe+TTJGy3yU9Ng46VIHd/syatPof7RHgLV7WXy3t/G+lyLI3/X1HX9QvxChS41698mzVUW4Zom3/wCsr+Vv4fag2leN9G1VGw9nrNrKrbf7sytX9TnjDUEuLq3v9i7brTrWf/eZreNq48VT5uWREpcvvHBeIJt0bJIm4Rt821/u1xfihYbfda745vl+X/ZrstcuJlWXZCsvmM3yx/LtrifEXk/8toVT+4y/w15tajzaG9OpKUjgdcjma+3j5Xji/wCAtXC63bv5jvvVNy/vVZ/mVq7/AMTTIzP5KLsb5fMWuE8Qb0hXyX85mVllVv7q/wAVebOlGjK57GHqSicHqEMK+a802yJX+61ZMyzSKnyKrrLt2s/3q2dUvIYf9S+zc+5P4ttZLNE3yO7I7P8AeWKo9jzS5uY9SniPcCzhmvIUmSFQ6pul8n7tXNPtZt3k+ZJ8z7Nu3726jT7O2SHa/wAi/e3f7VXbXfb3CukzOn3vJX5f+BNSp0+WroOpU5Y8xb0+NLWzms4bnHlv8jM+5lb+6tV9XbyJJnmbAVMsfT5c1es4ZnjjTfGHm3M8aru+X+GsTxrP9g0DU7hgD5FhKxBXrtjPb8K/evAxp55mCX/QLU/9Kgexw1Uc8VWb/wCfb/NHwl+0RqFtr/xSu0d5H2vtT+L5q4q4utN0G18m5dR/tL81W/GWvPda/c6lN/rZpWavN/El9PdXDfvGC72r85hH91FH5nUl7SrKUi94m8bvdGVC/wDB8rL/ABVx11qE11Lvkm3Nt21O1reXDL5aN/3zWto/gXUr5kRLZn3fxbaqMbkxkc5BbzSfchZq19L8LXl0yfuW+Z/u7K9J8D/APVrxftNzats/i2rXZXHgfQPBOmrc6rAsUS/KrN96tOWFOXvGftPf908x0P4b3Jj86/RlT+P5f/Za1pLXQ/D9l9xd7P8AI38W2q3i74rabbzNb6JC2F+Xds+9XFy61rGsTec/X/aqJS5jT3pam5qWvQySecnWqEmvXPl/IWDfd2rTFtbWEGa/dl2/3q2vB9x4evFcw2DS7U+9J95v92p5uUj3zAW88Q3G7ZDINv8AeT71QNB4n3b/ALHIv+01eoWOraHZsAmnR7F++s1X77V/CV9CpfR1R/vfu/us1Iv3vsnktnda2v8Ax82zf3vmrVs9aeZRvfb8nybf4a7xbbwHfE+SlxEP9pN1VrzwHol5bG50y5xt/h27a0+H4SJHmfij/iaa4JvLbCr/AN9Uy6keGEH5V/vf3ttXdY2R60/k9IX2bqxNW1BGmcb2/u/dqPt+6aGbdS+ZIRvYhXqCl65NJT+I2iHBFIq44FCrtpyfeFUEgZdu6mKNq7yKk+8xSmqNvSgOYdG3zBEqS43x7k602nq7qmwfN/vUEj4W8xW7N/erS0mBJNvz7mrNt1cM+9M1saDGhmRP7396gmR1Fuk0dutyk20Km3dt3VwvinU31TVHn37gvy7q7XXdQTS9DZ/lQ7PkXdXnRdnJduu7mojzjgLCpllCJ/E1ekaXappvhuJAn+u+auA0S2+0X6J/tV3Oragn+jabHtTy0Vt1P7QVJfZMnVNK+bzpOGWvvX47Ar/wTxKqQP8AijtIA3dOttXxEslteW+9EZ9rN95K+4vjzEJP+CfkkQXg+ENKAH421fr/AIYa5Pnn/YNL/wBJmfXcKaYPHv8A6dP8pH5+6fcMW2P1+9WzZzPGyuPlb7y7XrEjhmttu9P/AB/dWrZ/M2/fX5DHY+M5jo7K++QI77tq/wBypNQ0m21CEuiK52/drHtZHXc5f/c+etWzuvLK/d+WtTLlkcnq3hu4sZj95N3zVJpd2beRE+ZStd/qGl22tWXyQru/hZa4/WNDezm2Q7i38W1Ky5UaR/lZ1tjq32jS4kd9/wAv3V/hqDWl+1W/91GrD8N332VhC+3av3K39QkS4s3dHUfxKtVGX8xnUjOR9if8EWdW1XVPiN4z+CFheeUPGHgi8giaP5WaSP5lWrf/AAhqL4p/4SqzSNJrVvKut27zWZW2t83/AAGvDf8AgnH8Vtb+EP7W3gXxVZzR25bXo7O6aSXav2eb923/AKFXv/xgk174L/tReNPh7co0ljp+tzeVDJ8q7ZG8xW3fxfe+9W1GPNKSOWp7soM5v/gplJpXiZfAPiHTLyaabT/D6xXCyS7tsjSN/wB81zH7PsLr4G+0zQ+an2j5l2fdar/7QVunijRfO8+PyVg3RQxpuZW/u0vwH002fwrs3udyPJLI7r/EvzfdauepFxid1GMvanS3Cv5P2l7bb82379ZuqMkKpsmxF95l/utVy/ZDIZodoVk+X5/mX5vu1zuuagkDSJ52359u7+Fmp0Y/akTipfylW6unVvOm2/M+3dUUl5t2pC6jb99t1UZtQRnOxNqfe+akMiNJs3/e+bdXYeJzTjL3i8sUN43ko/yt8zt/8TXrH7Nlutvp+qJGfl3w7cnJ6P1ryq1byvnTc6K235vvbdtes/s5MHstUdIiil4cZXHZ6/RfCdW47wvpU/8ATcz7DgP/AJKih6T/APSJHDePjt8Z6rstvNYapKef4fmNY91HbNmN0Ztqfe/hre8dW7r411V0kfedQkOAvBXdWfZwwz4mRN6/e2r/AHa+OzqX/C3iv+vk/wD0pnzuacqzGsv78vzZkXGn+c6pBCoP3/Mb/wAeqjqGi2zY32y7vu10clvC2XLzfu3bY0ifwtSjTXkgKPbfeXcu5/mryJS5djgj7vvHBXWgujfc3bn+ZqpSaTCq75o2PlvtTbXZalofkyJs+VG+Xy93zVkXFn5e5IYWST7v+zWFSM+Y9rB1OaJzv9nwxt58O4vv27V/vVN9heXdvRnH3dy/dWtBrG5+V3di/wB3cvy7lpiWkMaPvG5/vblfbWEonrUY+8VLOx8mTYjthf4pF/1ldH4ds7ZcJHD8v3l+T71Y9vbozZ2b1/2v9quo0CzhW4E25sKq7/8A7GsJfGbyjGO0TvfAunorLNHC29fldZE/h/2a9i8J+H7O4t4X+9u/iX71eceB9NeRVuftLLuVVRZP4f8A9qvZvBdnNJGiCCNl2ru/vK1ZyqGNSMOpsWemTQrsdPM27VSPbWxHZ7pE85/nklbzWX7rbaks1e0Vpprb7ybUVn+ZasRw3Kr+5EcZk+40kX3f71c0ZSlLmOeXu7iW9nDJ5Uz/ACIzbkj+6zNU02nzXUchWHa0P3V/iZf4atxr+5eaBIwu/Zt2/eq1ZrtZnW2kRdi/d+6y1tGpymfLynyJ4gb7Qd/3trr919qt/vVyeuQ7ZHmfl97fKtb+qahmzZEdVC/cb726uX1SREy/k8Ltby/4v96v2Gn72h8NHlUbsxZPOVtibS6/eZvvLT4bdLeF3eFvm+b79X49Nma9d/JXLbf3lW7fw55jFJ0kA/vfxVqpUoijzxMaRWg7xpFt+8v8VSw281xtR/7nzyRp8rV0LeFXmhTybbcuxV2tTZPDM0O1GhkXdu+Xf97+KtvaUvskL4jAhjeOQwpu+X7+7+GtvS5PMVZsKPmZdtRS6W9vHvlhmZ1fd9yraWr2sg85G/ePt+WorYiMoijH3/dNvTbhGjRHjZgz/wC7urp9HvvtCoj7tkf93+H/AGa5K1X7OzI6NsWXdFuf7vy1saTqCRK0Pk7W2blb+81cPtoG3LLqejeF79FuETYqy/xL/s112n6xDC0sKfM7SqssK/w15Zp+teZCJp/mf7rf7X/Aq27HxVNH87yfe+Xdu/vVy1ImkfM9IsdYtplCJCvyv87Kn8X+1VptUe8j3wbd6vt+avPbfxE/l/uXjzH/ABN/FV6PxRNI2+bayt8u6P8AhaspS5ZGsY8wa1db/GJu+OLiMnIwOAv+FbGqavDbyPI8myRv9b5b1zF7fmbUX1CQbSHDHK9Me34Vma1r3nyDe8mz73ytX6dx0k8vylt/8uI/+kxPvuOVFZdla/6cr8olnV768upGuUDJEysrybK42+1BLiaazuUb/Y+T+L/ZqbWNQuWk8yGaZArL8slULjUt0MyJDh2bdK0f8S/7NfAUZQjH3j87qcvumVqnnXDHYkizLFtRWrA1KGZyIZuGV/4k+X/9qt268l2fyvMi2/Mvz7ty1k30HlzCHy+PlZGV90daxxUI6lyozkZkMP7tvOeNhsb7v3mrA+Kdul94D1O2S5j3rZSbdvytuVfvV1Mi21ux37cK+3bt+bdXI/FrfD4H1ObfvRrVlfdU4/FQ+qzX901wtGXtoHg3hW48PfFLwmnhjxDeLDqtqvyTTf8ALRa888b/AA18Q+A9X+z39tMsbS/Kyp8rL/erN1TUNT0PVPtmmloju/hrufDX7REOoWv9k/ELR4dRSRFHmMvzKq1+XrXQ+o5eXY4aa3huoTsjZnX5vmrEmX98UC17JZ+EPhL4quWn8PeLPsDyN89ncfdVf96sbxd8CfENrGbzR4Y71FbbutZVZv8AvmtI/wB0nm5jy9mdfk343Uxt6/6n/wAe/iq9rHhfXtJm/wBM0e4Tcm5PMgZdtZu1448v97/aWl9k3NGyvIVZftNTSSaPdMUkmUfLt3Vl2UUt1OsIT5m/iq7e+DtSgXekbNtGXap5CfdGXWh2zxt9juVP+yv8VU9NuJ9M1BJgWRlbGajltdS01t7pIn91qZLcTTcO+6qkUdB4kuPMaG/R93mJ87NXPTS+YvlpWnb3MWq2gsp22sv3G/2qy5oXgkaF+GWpiOMRtMZtxzTlbPBpPL96Cx1BbbzRSMu6tAFopGOBxSI3Y/hQA6iiil8IBSv940gOORQG3c0viJiFFFFP7ZQUUUUuUAre8GnCzv8A3krBre8NxhdPd06/79TIiXwFiffcXwRIWPzr8v8AFX9En/BAPwn4Y+Cf7Iov/FulNDp/9qW76prEdvuka4m+byW/3Vr8Iv2O/hpZ/GL9o/wn4A1JV+z32vQteNJ/q1hWRWk3f7O2v6y/hl+yB8Pf2ZPh5rvgrwzfR3XhXWpk1S3025iX/R7jyVX7392to0ZVIvllaR4eYV5RlGNvdPlX/gqZ/bOtw3PiL4Pa+JPh68du+sWEhCNHe+Yqoyq3zOpyD7YrkP8Agn1pXwg8P/DXU/iv4ssvtPiG18RtZacjjKRRG3jYOR/vFh+FbH/BSH9nTxPoHgu3+NngnXC2hy3kdr4m0uSTAgbpCyL/ABDeVGa8z/Yk1zTdS07xF8MdRvBDJfRi8sWmP7vzIwAy8c7ipxx6V+3ZTTlS8EcTF+9/tK/KmcMnCSemh9I+IPjRpWtal9m+2bYmlXbHap8rL/FWdrXiywWN7bTblrcN/Dt3btrfdavMPDem6rDfPDDZ/Nv2r5afL/vLXVX0KaHbpeX9z5T7t7rcPt2qtfjtSUojp8t4n4c/8FAdem8Uf8FG/ijql5eee0eqLb7l/h2xqu2uS0mNJtqP91V3f8Cpf2g9cTxR+2D8UfGEMqyJceLbpVkj+7tVtq7abp7fKsycNs+bbXHGPMe7P4IxJbxQzCH5T8/3v4ahVv8Als6fN91F+7t/2qmWZG/c/wB5vnZqbNJ8u9+F3feo+IiX7uPunrP7Pa2dvDfb3Xe0S/NJLt210/izxQ8Nq8Ns+F/5ayK/3q4b4Ptcm1uYbBJHdlXbHt3bm3fdrV8ZRppNxJ/bzrF5abvLavnM0lP255mIj+8uc9r2pDTPM8Q63c+c6xfLCv8Ad/h3V85fHH4g3HiHU/sK3LMN26RWfdt/2a9C+LPj2eLTptZu3URp+6t41/5af8Br5+vLuS+upLub78jbmrXL8NeXtJnpYGjGUeeR+jn7Pf8AyjcT/sS9Y/8AQrqvzfr9IP2e/wDlG4n/AGJesf8AoV1X5vM2OBX9AeK//IlyD/sFj/6TA1wnx1PUFXHJpaKK/GYncAbdzRSKu2lqgCiiigBd7etJRSK26l8QDtqfwUBDI3FJVzSdPm1KbyYev3qcfemTKXKV44HZtv8AFW/4B+Fnjz4neKLPwV8PfDGoazq99LttdP021aWWRv8AZVaTTdBm/taKw3LukdfmZa+gvGvwY+Ov7K37PfgT9prwhqv9jxfEfU9QsdE1DTbpo76NbXasrLt+ZVbd96qqcsYnP7SUp8sT518XeENb8G376Tr1s8U0MrRSq38MittZf95ay12eXX1r4f8AB8fif/gln8Q/iJ8U9VjRNF+IOl2fw886BWnvL2bzGvVWT7zKse1m+981fJLMitv/AIa54y5om0WMJR23gYFSLsZl2feqJR82PSpoWh3/ACfw1XoVLcuaRO8V9HdJw8Msbr/vLItf1J3WoXN54Z0G8vPmkbw9p7eWqfeVrWOv5bLLZK6Fj96WP/0Ja/p1vtUhs/B+g2fzPNJ4X03/AFiNtWNbWP8AirnxHwnLiPhMvxFcQq2yZ2i2/daP5fmrh/El0kau6Iyy/d3NW1rmsPwnkq7K25tvzba4/XNQdVDzzeYvzb2Zf71cfs+b3hwlKxz2uXiR3Dvc2yqV+VW3/drhfEl6itMls80fmbf3n3q6fxNdTQ/JPtRdn+sb5vvVxGuTeTcSI75+60W37qtXn4iPvHqYepynL6nMkkjujqX8/dtZPurVBpo1ZspIRuVpfk+WNf8AZq5r0z/8sU3/AD7tyfLuZqzWjS1i33O4rGu51WX7rf8As1c3+I9OnK8NC3Zq/R5tm35Ukkfc22tbT981vG8yNmZPn/uyL/vViWsxbYo24k+bzFXa3/Aq0LO4eP7/AJ0asnyLHtZW+atI046GntDa01bmDHk7V8tPvL/Cv92uc+JtwsfgbX7qTcQuj3LNnqcQtmtq1vn+ztDDuMi7l3N/FWF8Unx8P/ELhw+NFuuSMZ/ctX7d4FK+fZhL/qFqf+lQPoOGZ82Jr/8AXuX5o/NbXJPtV000MrP/ALX96qFv4Z/tKYOerPUWo6g8Ko8f+7Wn4R8XabZyD7Ym4b/utX55HY/NJc8jqvAfwRTWJUfyfkVvmZk27q9o8I/CHwlo8K3OpvH95UX59rL/ALVeZ2fxkttJhVLDy/LX7u371Ynir47alMsnk3O7cn9+n7b3fciZ+znKXMep/Fr4z+Ffhvo7Q6OYzeeQyoflr5X8dfFTxL4vvnmv7xvL3fKu6meItW1XxVqD3M0zPtqnH4ZEgDv93+7Sl70eZm1OMaf2ShDHJcSb/mLr92txVSxs0mZ+P/QWqCOwS0XZs+Zf4f4aiuPtl9hE+7911o5UHmZ+qatcalfbPm2b/lrpPD95HptqMuu7726s6z0NLdvOmT5vuqtalvZ2e1Ud8/7Lfdo5Qv71iyL68vmZPLZVb7/+1XQaPoNy1qjujKPvJuqv4T0+zvJm+zW3mOrLsVfurV3xdDDdXhhudVm+4qy28Lbdv+zVe4Tzc2xauJPD2jx77/VbdJo33eWr1k+KPihpVjp62Hhvc1xIn71mT5Vb/ZrmfGngV47FdV0rzGRV+dWfcy1y+n71Vkd2Wsyo/wAxozXW23d0fczfM7f7VYV1I8sxd6uX1xt+R0Zd1ZxJ3ke9BrGIU35F96dRV8qNAooopgLsb0oXofpQzbqFO00pbEcrHwru+d3qSNU8yo1Z4/4Ny06ESbt2zmlykyLNvHMz/J/3z/erotFj2r+8TKr/ALFY2mw7bhXTmuo09U0+3e6/hVPvURlymcpcxiePtQSaOKwWHb/Furmqt65qE2oalJNI+4L8qVUqjePuxNvwJatNrKOEyV+b5a1vEEgm1R5tmxl/h/u1V8DLHb29xdhPnVfk/wB6rVwu6NpnfcW+/wD3acY85lKXvD9Lvvs67H6feWvvv40xpcfsFtGM7W8I6X+X+j1+e+51jHzbP9pq/Qj4vlR+wYpbOP8AhEdKz/5L1+u+GC5cpzz/ALBpf+kzPsOFHfCY/wD69P8AKR8A3Fj8+90/75ptrN5Eyo/T/arY8nerSPu/4DVKSxQSB0+dl+8tfkEf5j4otW6pcSM8LqP7+6pBdTRtvd9rbqr2cscVxsdKuXEaXH93a38W37tMDb0HWiu37y/wtu/iq/faemqQsj/e+98v3a5O3kmt1Z4U3bfuLu+9XTaHfboxvTKf+zUS5ufUzMC40/7DdeSU+Xd8yr96tBmM1mYfJX5k/u/NWrqVjDeKzoiod21f71ZM0b2Hzypz/tUGhZ+H/iq58L+LrHWLP/j5sb+G5t/96Nlav1A/aW+GOifGz9o3RfiQibLTxp4FsdSguPtSqnneTtZW/wB1lr8mtUvIIboO6fumb52av0V+C3ijXvif+yL8LvGdheNLd+Edem0S4kmb/ljt3Rrt/u104KX+0rzOfFQ/dXPPrXS5pJrzwvMkcvlyyReZs+9tb7y11U3h2bwj4dtIfsawwtFu8mT+Jq2bzw/C3iK/s5ns0v5rprhFVWXcrfwrW58VNah8Xfs86Df23hVrKXwveTWWrXHm/wDH00jfKzf7q1eMp8tWRWHqc1L4jyDXtas7VPMm+VlTdtX+KuL1jWvLmdJI96f3m/vVc17VJo2m877zPtiXfu2r/erkLy+/0gb+f95qwp+8RXqSjHQtnUN27zivzfeq7Z3X74RhGVfu7q5xtQRZH3+W6N/eSr9jceWuwv8Ae/u1t/hOCUTqNPvkkjaEcf7X96vZ/wBm+4e5sdUkZifmhxk57PXhFnfJ8kPyv83zLXuH7MVx9ostXbYikPACEOez1+i+FH/Je4X0qf8ApuZ9XwGv+MooPyn/AOkSOO8fiCPx3qcpMrML+bA37UDbj1rNjm8uZUR9hZWXcv3dtWfH95s8f6y7xnZHfy7gejfMaz4rp45P3zq5V9yK3ytXx+ef8jrE/wDXyf8A6Uz5/NZR/tKt/jl+bL8mF+S1dnRUXdu/vVb3JH88cLNui2/N95azYblJI96Jlo9zL/DtqeO4uUtV3v8A7XzfeVf7teZynncvN8I3VFSONnR+Nu35qx7pkht22W2/5d26N/u7q0by4RbeVHRsfMzeZ/7LWPcXD+UgR4y33dzfxVz1OY9LBy/eFS8kEjbEtVRvupVWOP8A0jM0LP8ANtSprpoZJld/n2/LuX5d1VppN0nkvt+/uZV/iWuOUox90+gp7D4ZHmZ0R2yr7dtbfhqR1m8m5dVVfuKz/ern1aCaTYny7U3Ve0nUHtXV32ttf+5u+Wsai933Tfm5T2nwPdPHAr3k0bOrr93+Jf8Aar2/4f3jtDC8zq7r8/mL826vnHwVrSRn7Mkyq0f8Tfxbq9i8BeIEt5beF5mKSfN8rfKq1zy55aky+E9f028e6uPs1zbbh977QqVttbzsn+pZyvzRM3/s1cf4d1bTbjY8Ny25ZdiNv/zuro9J1KFWCPbbX81t0jfLurGXN7r5Ti900bLZuPnSf7/+zSRxyQzM6TZH3Io/4abcXDzQqtt8v3vmqhqWtvaw+S80bSbd237q1p7SO4HxTqV86M1sjrtZ/nZv4aRbd764M0zttjXdKy7W3NWGNSubhfkuVKs/3f4maug8O28ilLl4fuvufy28xVav1WOK90+Sp4X3bmro+j7mxsV12r8rV0mn+HY1VLl0j3Kv3aZo9kk8yuvPlp88kny7q6fTbHbGHe2Up/z0/wDHq5a2OlKOkjslhfhM5fCdtcbHjtmCR/N/wKluPBaLl7k7dr/LG33lZv7tdpo+nzTQiZ9zCRdyN93/AMdom0+2jLQgqo+VFb733fvbq4pZhKMr8xjLCRied3mhwxxpMSxM25Pm+9D/AL1Zl7pKNcD7HujVvusz7v4a7/UdLdpGtofMCbdysy/K26sTUtL+x5eG2xTWYe03kTHCyhscsrw29wiOiuF/vfeZqI7rb5jv5ip/spVu6s5rWSbY/wA80u5Gb+7WdeTW0kB8n7irtddv3qUsV7xp9T7l6x1p9Pxv3b/uvuf+GrNn4mS3kfZNuH91q5K4uUt7dbVNu2P+6jfL/u1A2tOsaRP8m75dypWksdzbGUML3O9bxck0buHXau35aY3i6CzYhNzfPtZt/wDFXANrnlRs+9l2p8jNWbJ4s2xrc75Nky7mVqr65zlLDyie76ffGbwob6J2Yi3kKljzkZ/wrh7zxJbTMZkmZjJ/ra2/Cupi4+Cp1MfNjTLlsDvt8zj9K8lsfEFzcQh5J4wzL91v4q/T/EGtGGUZQn1oR/8ASYH3nGtKTwOW8vSivyidsupQzM0z3Mm1V+b5vvLUc+o/MPnZ/MTbtV/u1y1jrDqu+2mZvM3Iysn/AKDWjb3KbldPLYb1X5flZm2/xV+XSxnLHlR8LHDXleZo7nkjTzvM/uszfN5dI2+RmTezbU+X5f4qhs2hk23KTf3kb5/lqyykSI/y7Y4tu5fu1nUxnKdEcPKRUuI4XbeifL8v3m3fNXAfHqNP+FT63M6b/LspG+VNteiX0fmRpBD8zMjfvF+7XFfGyz+0fCnXYU3FI9NkeVW/i2/3ayxGM9pQ5eY2o4WMalz4w1aPzrFfmZtyKyKy/wCzXLXEL2txvT+9Xa60v2PTYpvMbay/Lu/3a4bULjzpSf4t1fN+6elH4gh1SaF1dZm+Wul8P/EfX9PmR4dSk3L9xt1cgqFm21a0+3dm2PuA/vVJXLA9Qs/i54rmiENzqTTRbG/d3C+Zt/76ouPE2j6gz/2xoNjcq0XybYtv/oNcJ500asiPytWre6f5WTnd/d/hqoy5ZGUtjfk0nwNffvrbRJrfam793P8Adq7DcW0lm1rDuddu35k+asS1mdx9zarfM22tPS5nWffPM2F/urVxFKX8pDrnhW8uoYtiK0ez7rL95q4/VvBmq6fKdttJtX+7822vWtWW21zRdnzI+35GV9rLXneral4k8OzSWs037v8AvL/F/vVPwjjKfMcoVmt2+fhlp9xdeeNkyfMvetr/AISawuTs1LSo2/2l+9WdrTWAYNbJyy/w/wANHNE2+IoUUUVBY3y/elVdtLRVfCAUUUU47AFFFFMAooooAKKKKACiiilyoBVXd3re0yaa30kum3bWCpw3z/NXQWUciCNIduNq8GiUTGqfRf8AwTv0+bTfFmp+PEhX7THZ/ZbC4b70MjNuZv8Avla/qG+HHxph+OP7O/hX4j6HrCy22reFbeK4h8r5o5o41jk/8er+cfwL8Nb/APZ30/w34J1V9uoXmkQ6tfwtFtaH7Qu5V/7521+y/wDwQ/8AilD4/wDg34v+Dt5qqyXHhe6t9RtbVvm22s3+sZW/3v4a6MPLlmfPYqpKpLQ7j/go28nhv9ljU/D1/JiTUUspoiW4l2XcQOPzrwD9gXwFD4o0W41eTTVmNrrEqh40BlUmCIjGe3Wvd/8AgrzbXD/CXSbm2gZreCURNJt4UNIjD9RXhP7Hvxu8DfAH9nTxJ498XeLo9NlTX5FsbdU3T3cgtosJEP73Nft2EqRpeCmKl/1Er8qZzU4ylTsdvq3ijwB4CttS1jXtehhms7qRZVa4VfJ+b5VZa+H/ANrD9rzxh8bLq58N+Cb1rXQt7farj7slx8rf6v8AurXP/Gb4yXPxW8V3usanbSWNrfXX2r7HJ96Rt3ytI396vKvHnjaw0vRZ/I2ysyyNtVfm+VW+Zq/nrG4+cp+69DelGV+U+MfCljNeeINYuXDFW1eb+P73zV2Nu3kr5PzfL/DXG/DeN76zmmmfa81/I+5v9pmrs/JTcmE3Oq/Jz8q/71d9L4D2X1HzQvJDv2LiT5fmqNti/I8KuPu/7tTXB3Q/J/wLbVJo9u/zkZlb7u2r+ID1/wCAPijw34K8N+IfEPiGGOW4j+zrpas3zeZu3NtrjPiV4yvPF2sXPiHUrny0+Z3j3fKq1Q0CRDYsj7di/wB3/wBmrzD4+/Eh7iY+EtKmUL/y9NH/AOg14lajKti7HPHD+2q/3TjPiR40fxZq7JbP/osPyxD+9/tVzZOeTRSAY716tOMacOWJ60YxhHlifpD+z3/yjcT/ALEvWP8A0K6r83y23mv0g/Z7/wCUbif9iXrH/oV1X5vMu6v2nxY/5EuQf9gsf/SYHHhPjqeotFFFfjHMdwUUUnz+1UAtFFFLlQBQG3c0qfeFG1FUbPvUogNUYGK0PD1++n3n2mPrt21QrY8EeHb3xN4httD02NXuLqVYoFZto3M22nzcvvEVPehY1ZtcvdS1RLmaZs7l+996vtD4Z2HwK8dfC/4b6r+1pD48ufBPgV7hvsvh3UVb/RZJPMlhjWT7rSN/EtfNmp/BLTvh/wDFr/hWvjT4neH4bu3ljWe80+6+1wRyN823cv3v7rV6N+1Z8U/Fev8AhDSv2fPDXhHQ4LrS7VZLy68P3O77Rb/dVdv97+Ks69eMrQW7OWitbs9P/wCCnmp/szftAfBHRfj3+zx8SNB8F+EdEvF0nwH8DrOXzbqys/8AlpdXLI3/AB9SN+8Zm/2V3V8CS793FO1CyvNNvHsL+2aGaN9ssci7WVqazJxvpxjKJ2jWG2ShndpN6CkY5bipLdfmOf4aCPhNfwjp/wDaXiTTdNT5TdX9vF/31Iq1/S94nWG1tbXTXEzJDpFnEsf8Py28a1/Od+zb4dufE3x58EeHkh859Q8X6bEkK/e/4+F+7X9E3jq++x+ILy237mWVkRm+b5V+Va5cQ/hic1bocpdXiTXDQvbMnl/3m2rXO6o00bMifLu3N81buoNJI0r3KRqu3ayr8zVg603mLvfcSy/JJ91q5pe7EuPxnH+JLf7VbhHKoq7Wfd821q4bxEsy70tnb/b3fdr0XXFhXf5wjCRovm7vvf8AAq4HxEtz572yJ5nztv8A7rLXJU5pyO+jE4fVJHtWRJkZPM+dvkqnJdTHfJs5V/mX71XtYbdutoUkdNzfKvzf8B+asuFZtyzQo27ftlVvvVzyjM7oyLFvNNG3mujS+Z/D/dqzZ3ELRs7pJsWXbuX/ANBqpH5PlrcvbSRyebtTbT4Vh+a2Tdne0rx/3m/2amP940lHmiWlv3jOxJpHZX+Vf7u6ofHTG4+G2uG4JGdHuw5PGP3bg1VWSRZn2IzBmVW3fwr/AL1XdYhF78P9Qt5WGJdNuEYjnqrCv23wLnzZ5mH/AGC1P/SoH0fCitiq/wD17l+aPyq1PVHabf5e3/ZqlDdvDumR9n8NX/E2jvZ39zZzSNuhuGX5vl/iqlPapCvzphW+ZK/OYfAfnsiRdYmjX55mqpJrE03Dvn/ZaqcxfCp33fJTJB8+08/3v9mr5fcJujXtdchjVUfcP9qtSPxFprQ/fX73yf7Vcltdm2fdX+Gnx71XZ/7JU/ZGdO2oWDbd6LuX+JaZJqkLLsRFT+JdtYVv8o+/81Wo28ydXd2qpS7GZPNqTIu/fuNVbrULmTdJvbC/d21JJH5iu7v8u/atWLXTrZnH2x9gpf3So7EfhfxlrGg3QubUZVfvV1+m+PPD0twXm0eTfI/zNI9VdH0bw3Lb/JD+9X7/AM/3qmuNN0f7Tss4W/22kquX+UOZHq3hTQvCvjDw+88KNE3lMssbbf8AO6vD/iR4TfwbrUkKcozfumr174WtNpuj3Ezw7UX+H+9XL/GzS5Nf0ptZCZ8v7jLTl7xl76nc8Wu5nuJi70z+H/2aiT74/wB+koOvoFFFFBoAXbxRRSbflxQA5V+b79G35s7KSljUSHZQTzMlLbgP9mpI49zLzhqjVDJIz/3as2qozLv6fx0+Yk1tFtst52xSqt8tafiS8Sx0V0L/ADSf7dQ6XZou35N/8VZPjS+Sa6FjC/yx/eWp5kZKPNMw6WNcsOPlpKn022+1XaJ/tUcyOk63QbEW+i7OvmfNuWmSQ7/uJvq1YzIzLZu/lIvy/wD2VOmhfcyo+F/gb+9Sic0tinNbv9kVH2/M/wDFX318aW8n9gPKk8eENKA597evgib/AJ47/u/xV96/HBHf/gn+yIdpPhDSucdObev1/wAMFfKc8X/UNL/0mZ9lwpf6nj7/APPp/lI+HLeTzIQ/3m/36WSNPMTyf9ZWbYXzw/u3f5v462I7q2k2I8K/c3J8lfkX2D4rnKiw+XP52cLvq3C0O4/40k0fytsTKstNsVeORpN//jtKOw/8JLGu1fubd1WdLvvsrbPO2DfuqJ4U4m3sN1ElqjbRsyy/N81HxQFzWOjW4S6t/wBy6qV/iasrVofs8jfP5u75qsaPcRtGE+4zfeWjVoy3zp97ZVxIt0OQ8SMWtpfn+Zv4Wr7P/wCCYuvf8LC+CvxF+DP9pNHqENhHrehqv/PSH/Wbf+A18Ya03mQzpNDtb+CvWv8Agmd8crP4NftUeGdT151OnX1xJpuqRyPtT7PMu3c3+yrVVKUoz5hVqfNStE+spPGniG61jQbnxVC1tHDE2y4ktfmm/ut/u16Notnbap8MPG3gPVdS+2Pq1m15YKz+WsMy/N5i/wC18tfoqP2Qv2b/ANuf9lfQrDTbLT9M8V+H7C4t7DWLS32RfL93d/vfLXwNpnwr8efsu/GSz8JfE62jtP8AiZfZ7ea4bcskf3Wk+avpcdg41sNGvT/7eifP4bEVKdX2M9+h8R+JNWdbrfv3qybfm+XdXOXmpJCwR3+993/Zrv8A9srwqnwx/aQ8U+CbaRnt7e/+0WDbFXdbyfNG22vIpdUhLDfuY/3a+e+E9SN5Q5TVk1KGPdDhnVv4lqzY6gmVdN29v4d1c1JqTtJ+5dfvfKtS2usPDI7+c33/AO792lGRUoSXuo72HUodzlLZl/uRrXvf7JtytzZ646k/6y34PbiSvlmx14xxoiTN8zfw/er6S/YmuRdab4iffuPn22T+ElfpHhN/yXmF9Kn/AKbmfU8DQtxLRf8Ai/8ASJHNfEeVf+Fga3G0zZ/tCYnaM/LvPy1kx3dvcKEdPmbavmfxbqg+KGqiH4na+EkUeXq04I2/7ZrNXU0m3+d8oj+Z1/hr4vPdM7xX/Xyf/pTPnM0p/wDCnW/xy/NnSR3iKoRHjba6ttqU6g8cm/zt7K/3a5y3voVZE8xVWP7q7P8Ax6rJ1RGtzPMiqm35GZtrf7teZzTjE4o0/dNDUL7zl865mX5V+633q5261RBMYflG1t21VqtqGsfu8fKr/d+b+H/gVY9xrDtcb0mXc3y7qzlI6cHHlnqbDaluUoibE3fxfxUf2jD80r7drOqoqr826seK68yRZN+4/e+WnySbVaPzP9Z8ytv+7XJL4j3qfMbFxcJHGv8ApOwf3l/9BpY754pPk+Td/CrVmNdPbqmxFbbtV1+9uqbdMzbEkjwu5nbZUcvKbSkdv4V137O3lvcq4avTPBfipIbUQzXPz7PlWT723dXg+l6s8cImh+Tb83/Aq6jSfEyKqvc7V+X/AFi/N81RKP2omVSUeU+nfC/irav2bzsoyf6tvuq38NddpviosuLm5aQRtuSNW/h/ir5v0Px15P7uabarL8rbvmrstL8b/MiQzfd+dZG/iqJR7nJKXvHtf/CaPDZmCFFkT70C79rN/s1j6t4yd45X8tdjff8A4v4fu159N44eRhsust/e37VrD1b4geXE01zMsTN95fNaspU+aIuaETyPR9Q8ySPekar/ABx7vlWu18MyRxxkpHGi7trQx/Lu/wBpa800Wazjjaaab93v2/L95t1eheF2+zLE+/7vy7pP4v8Aer6ytiuX4TCnh4/Cdz4d+SFYRGqbk+633q67QZEwyOnlt92KPZXFaXHDPIJi6zbfvyb/AOH+7XTaXctDGk118qK25Pm3Nt/hrjlipS1NpUYna6PNMzf6TN/d2SbdtXZrVGzcwhdk27zV3/8Aj1Zmi3Ft9k3wTNM0fzOv8NaUdul5tSY4LJu8tfurXFUxQ40jP1SzdVR9m8wozbVfcrVgavbPJ9y2kVpNvy/7Ndmqp5aRu/735l8lkrH1izdfNtoZt25/3Uf/ANlXN9ejGRUcLzS0PPPE0aSs1zbbU/e7Ny/NXL6jNNtaBPlP97ZXc65ZwwK8fnKzb2b7u5d1crqFrB8s0Ls0rfK3y/K27/aqvr0u4SwvvfCcdq19DF/y7KzxptaT5l/4FXMzaw7SKn2lsruV2+6tdN4ktUjt2hd2UL8u1v4q8/1z/Rrp0+Zn+9tZ/lX5a6qOM9oc9ShKJZuvEU1uqO7/AL1W2/L/AOhVj6lrl3H+8eZm+f7tUZtcmt7j5EX7nz7qydb1qGWNnfqtdUcR/KYSo8p9V/Da43/s1rcMTj+x708+zS14fod9H5aO+7Z95Fkr2P4S3Ak/ZPjudxIOg3zZ/wCBTV4P4T1Kfy/J87Lt9xWT7tfrfiXU5cpyT/sHj/6TA+04shfB5d/16X5ROys5kjZHv3VU/vL/AA7q19Pb7Psh/wBY33l8z+7WDp80/wBoieaZXXZufalb1hdeS3nO/P8Ad2fxV+PyrcsviPkYx/mNjS/JUqn3nk+9D/s/3qstskZn2KVb7y/w/wCzVOxWa4Znfa0W3d8v8NXo2RYWm/5d1/u/e3f7tc0sZL7RtTpkcnkRxb0h2S/ebbu2r/s1x/xRhhuPhvroebLNpsibv7rN/s/3a7ia4eOzZ0hYfL/FXD/FRobL4Y69fpCskq2DN/d8tdy/NWf1qUjWVHlPjH4qX0Nnb29hCjfKvzf71cAzfx1t+PdZfV9ZeZHyKy9O0+a+uRFGjGrjEmPuxuFjb+fKBt71vW+nvDb8HczVs6D4Ff7LvkTa7VDr7Q6XCyIMndtq+XlM+aMjG/fecyO6k7/u1oaTapu+eFqw7jVEZjsRvlpIvE15byB0fil8Ivfkd5Z6I8n+p2hPvbv4v92pI9Njt1i33Knb8zs38NcpY/EK/DeTO+1W++y1c1rTLnV4vPsdaDI23YgpylzClHlOuF5YSL9j/tKEj/rrUV9pMOuWv2aYK8ez5JF+avO5vDWuxMXhDOF/iV6m0xPHdsv+hw3RVfm2/wANTHnKjGO5V8S6DcaLqLwn7u75aypGfOxq3Nb1nUrgbNVsSHVf+WifxVhzO8jbmpGsRaKRWzwaWr+Iob9/2xSMu2nKu2hl3VAC0UUVcZAFFIrZ4NLRHYApeVNN53b91LUAAbdzRSKu2lrQAooooAfHHukXf0avW/2VvA2m/EX46eFvBmq7fsE2qRy37M/3YY28xv8A0GvKLH95IN/G2vev2WfDepWV5P4wsJZEmX91ayMn3W/i2/8AAamXu+8ceKkoRPrL9rbWP+Em+M0/iq2mV7aZVit2V/uwrtVV/wCA7a+xf+Df74jWfhL9q7WvDd5qvlL4i8HzQMsn7xZGjbctfn7pdrc3V5/aXiR8xwp92RPvN/er3f8AYB/aAh/Z7+Plt8WraFbiHSbK4/0eR9qzNJHtVaxp1LS55HiOXOfqr/wU9+I3grW/2cZ9GbWoY9Qk1G1Sytj9+4dHBcD2VQx/Cvys+Lut61Dd2elWDEpHG00fmyfJFIx2Fwvc7Rg+wFbni74q/E34/fHKX4n/ABL8fxXGZ5hpPh6zi2W1jAUIAX+8395q4r47WllN4itZ7y8nVRp5QxxvgYLNz9a/YqWJ9t4C4yf/AFFJfhSHFezkctdWaPdP/aXiFX3Kqsqy/Kv+7WJ461DwloHgvVHSaNy1rM26NNzM3l1Pb6f4es1KfY1Xau5dz7ty1zPxq8QWui/DPVb+zhVCulzRbWX5fmXbX8+r95Vi0VR96rFHzp8M7d4/DsE3k8ybm3N/vV1Mm+HOxPl+9838Vc/4H/0HwzZwpD/rIl2bWraWZ5Y/33yn+61fUwjoerU+ImjjS3jaZJmK7F2rVSS48kF5Plb723+GoLrXLaPMP2nZtfbtasa+8RIvyQ7Sn96l9rQXLGRqeIviU/g3wfdJbJH9ouG/dTfxL/u14TeXc1/dSXly7O8jbnZq6D4iatLfXsMH2reiqx2BuFaubqY04xlKR2UafLEKKKKo0P0g/Z7/AOUbif8AYl6x/wChXVfm/X6Qfs9/8o3E/wCxL1j/ANCuq/N+v2XxY/5EuQf9gsf/AEmBw4T46nqFFFFfix3CMMjiloorQBFXbS0UFd3FT9oAooZfmye1FPlQCt+7au1+BWr6bo/jb7Zf7d/2C4W1Zv8AlnN5fytXE0b3Vg6Nyv8AdqZRJ5UbUWnzLdPc3k2597M0m/7zf3quW8F42rrq763J5i7dszP8/wD31WENVuQhTPBqM31y38bCr9zlMOSrzXub3xDvbLVtcTUbYbpZrZWum37t0n96sBd67t9G4NIzvTJF+bmp5TeO4L8nCPU0bKmE6bv71RbTu+SrEMM0mfumpJaufS3/AASn8K/8Jh+338LdKmto5IYfEa3T+Z/0xjaT/wBlr9w/Fd1CLyWZ33edcMySL/eavyN/4IS+CpNY/besfEkyRvD4b8L6hes0n/LNmj8uP/gXzV+sd9Ntt/kfeJPvKz/xf71ediJe8Yv3nymRdN+7d/m+V/7n3qyNSie4ZY3s22sv975lrS1BrZbqSGO8Zwvzbf8A2VarXiw3UaTfbP3f/LKNflaSubm6s6oR945XVrVxG6PbZf8A5a7n+Vv96uS1LSUhYiZ23yP8vlv81d/qcJaRke2XLbvNb+Jq5i8sZppJSzyJMqfJtiX5f9ms5e9E6qcTzTVNHcRo6Iqtt2urL92sSTT3jZ7Peqn7zbl/75r0DUrFBueZY5TMrK23+GsO6tLZQ1s88hRtvzNV/YOnlOVW3uo4/J2fMsv72T+FarFZlZJ98ed27zFb5q3NUtUWHfbQt838O/5WrNuP3yt9p3IJNv3fm2tXLKjKUtS170feM2SZJVdEdkZpd25futt/hrYMYk8HTwncN1nKPlPPRunvWTJHtaVBMuyN9y/P/wCPVtGQjwxNLvPFtIQynkAA4r9p8DoyWf5jf/oFqf8ApUD6fhWFsTWl/wBO5fmj8z/jp4bfwv8AEi/heFkt7iff+8ri9auNtqnloo2/w19V/tUfClPFnhd9dsH3zwt8y+V8zf8AAq+SNehubeQWdyjK8bbZa/MsNW54nwWIozo1PeKD75GX5/4ql8t2XYNtQK22T/Z/u1Pbx/effk/3a7Obmkc/2B8caeZ845+7UbMiyN89SeZ5cZb+Gq/yeYetMB5zHJvdKuWsbzN8ifMv391Vlj/eM7u2Nn/j1aFnC8O19jb/ALz7amMeYiUSXb9nVt6bvk3VWvbx5JlRH+T/AGaTUL6ZZGh34Zvvr/dqpG0zNwn+/RER0Ol3lyq70euo8P6XNfTRo8n3tv8AHXJaLE8zhN+0f7Ner/DnR4fJ8z7Kqbfli3J/49T5eUcubkN1NN8nSbews9rH/lrtqa+8DzSaTNvhVk8r/d+b/ZrrvB/hWHb9qmddy/N8qrtatPxBbJcM9sj7Pl/u/LWspGEZfzHxF4r0z+yNeutN+b93K33qz67j4/aGmj+PJtnzCRPmb/arh6zO+n8IUUitupaUdiwpfmWkpFbIpgKW280/bvxsprIFApwY5L0uZAEP3q09LhSZvnXH8Py1ST7wrc0O3TztjvtpmMjXhaGztn+fbtT564nUbp7y8eY/xPXS+Lrp7XTvJR23M38X92uTUEDBoCnHqxa1vDlm6yNN/Eq7k3VmW6+dNsrqtN0/ybXydm5/vfNVfEVU5ugkbfZ2+fcf4q1Ix9ot/kRhu+b5qz5V27UgjbG/73/stW7G8Ty9nzGp5eU5/iJLq12oHTlv92vu343K3/DAzIDtP/CJaUPpzb18NSRo0P3GX/gVfc/xtLL+wW23kjwlpf8AO3r9d8L/APkTZ5/2DS/9JmfacKf7nj/+vT/KR8BTxvCyom1j/eqxYXE02Wf5T92msJvM/efKrUscZjbfvr8kifHmowk3B4fvfdTdQJplk2b1H+z/AA1Bp9w6N5fysy/xM1W1jSTLvH83+zR/hM/cFt7hJJFhcM396rEcyXEOzO35dvy/e21Vh+WPdv2r/eqZW24dEZ1/j/hpa/ET8USW2vvst4IUT/crZuv32ns/3dq/erHWRJFXCfd/iq3HdTSW/k/xL99f71WP4fhOX1uHbcOkLt937zVzeg6hJo+vLdrMyvG+4bf7y/MtdR4i3qx/2v8Ax2uEupdt57K3zNWZpT94/pW/4Ik/tBQ+NP2c4YfOZ7q4sFVoZvlVZNu2voT9rD9mbw9+1d8HY9N8SaD9j1zT1ZdD1KHbvaRfuqzV+Q//AAQp+P1/pug6n4S1LW/Ljjuo2TddfMq7fl2x1+3n7Hvjf/hZel6n4Ytk+3JZ3SvdNJ96Hcvy/wDAa9rDY2q7QlL3Tx62Ejyua+I/Bb/gsB4BuvCPi7wN42udNjtru60OTSNZXdul+0W7fK0n+8tfFz6om77mx2r9qP8Ag5A+Adgfg/qHi3QdKkF7perR39vNDb7vLj+7Krf/ABVfh7PeeZJvd2wq/IzferjxFOVKVgwdT2t2/iNBtQT75TD0+TVv3Y3sy/32WsRrzaF3v8rURX/y7C6tXLKXKd/L7x0On+IBGyfI2zd8rV9Wf8E+9QW/0rxQMcx3FoC2c5+WWvi+O8eP597I33v9lq+uv+CaV19q0fxa2zG2eyGfX5Zq/SPCX/kvcL6VP/Tcz6rgqMVxFRt/e/8ASZHB/GTxA9n8ZPEsSsny6xcDkZ/5aGs/T9e8+HZcj5W+ba33v92sL496zJbfHPxWqP8AKPENyG+X0kNYsfiiaGH/AFO4/wC196vjc+/5HeKS/wCfk/8A0pnzWZ6ZlW/xS/NnokesI1u8aPiKOXcu2ql54utoY2mdFdV+b71cTL4gu5G2P9xvufPUcEm6b53Vf71eVLl5jijGXLdHR6h4oe8uNiPsVvurVdbpGl3u+1ldfl+9WRHMkb70RmLfK9SrJD5g2fK38TNUy5eh10ZRibsNxuZHtn5bd8uz5asRzKJFV3z8rfwVjreTf67+997b/dq3b3CQwvshbd/Buf8Ahrm5UejTNSNvP3Ike7b9z5qk855EWabav9xVqlDcboymz/f/ANqprfybnL/ad+5v87aXLzQOnlRZWbyY49n3G+/u/vVLDrU1vJFcw7flfbtVqrx3Dx24heaNdy/Nt+am/Isfr/srRTiYVNzsNL8VJJCH3qfm+9u+9WzY+NJYZEdvM2TfxM/3a82t5prfaJLZm+b5FVPmWtG3vH8tf3Db2Rv4/wDx6rjRjKJ5lao6cj0abxw8cH7l/mVNr/Nu+WsHVvHE11sthcsWX+L+7XL/ANoXkm5C/wAkabfv1QvLp9y/PsX5tu2q+rmPtub4jc8N3/nN8k22Vfm87dtr0Lw3q20JeWyKjN9/a+7c396vFdAvkvJV3/IzP95a9G8LXkcMm9LmTcqbUVfutUylLlPa5Y/ZPXdNvoJLdJkmxNvb7vzfKv8Ae/u102g3iKySJu/haVY/m215roerPCyPbTN5jbV27vvf3q7DQdY09Llkjm/e71Xyf4vmrmlKrGI+U9N8P3kMkiO53fLu2r/FW7p8kNuqTI7B/NZ9sP8AF/vVxnhfVEVQ7uqNHuZP727+7XU2sk21XdN25lZNvy/99V52IxH2Tqp04yjHlNS8/eIHmST94+7csVZetNc3Mb7HjhibcvmSf7P92r81/wDZ4mmhdn2/M+77tZOoQwXG25SGQ/P8kO/7teRPERp/ZPQo4X4XGJzmrW6CZC80kT/di3fdkrnNW0n7K32a5Tzl3s8Xz7lX/arttSW2uI186Ft0jbVWN/u1gaxYpbwCFEZF+98vzK1Y/XPaRtc7f7N5o8x5Z4s0/wA6N/k37dzN5ny/NXmXiC1ma8dPO/g+evZPEmiu0ZkmTbL/ABqv3a848QaDMscySIy7U2v8v8NevhMRyzj7x5OKwMtzzbXN8DbHTcy/NuWuZ1i+/ct+/bGz7qpXba9pqLan7yuvyu1cL4is33M6fJ5nzV7lGp7/ACnhVKfLLQ+t/g5M7fsbxzE8jw5qP6NPXzn4LuHZk3zMDv8AkZv7tfRPwZVl/YwjWTk/8I3qOf8AvqevnDwbavJIkL7sL/47X7T4mK+UZH/2DR/9JgfV8XK+Cy//AK9L8onovh+6haYQu8jJ/A23+Kut0lkW1/fIu/c3mqz7vl/3a5bw3ZpJMqIq4rr9NjtoZFTDSmZdrMv+zX4zWj7x8jGVjSs1+yx70Thv4d33alWN2kZ/J+6/mI3+zRDawtc/Pcq7xp86r/6DWlY/vI1mdP8AVozbv4v92vPqc0TriVdszW8n7najPuikkfd97+GvKv2nNQfR/gz4lmSZUT7EqIv+823bXr+pSQTWCbHkQt8yx7N1fP8A+29qkP8AwrtvB+murI1wtxesq/N5m75Vb/0KscLGftb/AGS6ko8p8c2ts+oXXzx16b8O/hskdv8A2lfosQX7nmL96rPwp+Ef9pSf2xqSYgjfd/vVsfFr4haP4djOiaJcruhWvaj7vvHDLmloYPjDxRZ6DZvDCMbfl+X+KvLtV1i51O586SZsfw0/Wtdn1q486Zv+A1TjjeWTatH95m0Y8sRA27mlVNxwtaGneG7i8RrmUNFDH/rZGX7tLcLa225LBPN/2mo98Ob+UzmVwv3KvaNr2q6PKv2a5YJv3eX/AAtTFjUE/aZsf7NT2MkNq29LbNKQuc2JPiB4tkj/ANG2xjbt+WKoY/EHjCST7S+q3CfwsqtTH1CTyRDsX5vm2rUtja3OoTrDIjEyfcpxjzGXNyxOh8F3H/CQLcaf4ks47kMnySMvzf8AfVc94w8DxafC2q6RIrx5+eFfvR11ENna+HdP+zWzs1zIn72T+6v92orfTWmt/wDSXWGGT77NTFGU+c8yTr+FOZc8irWtWq6fqk1sj5Ct8jVU8z2rM6h1FFFXyoAoLbeaRjgcUn3/AGxS+0A6iiijlAKKRjgcUK26iIC0UUVQBS/wfjQGK06P5uBQBs+DdHu9Z1mPT7OzeWWZ1ijRU3FpG+VV2/71ftV4F/4J3+BvhT8B/BeiXnj+1stStdDt5/EelzWSvI11N80nzfe3Krba+Lf+CBP7H9h+1f8At6eGPDviSzkm0Tw3FJ4l1lVi3L5dr80as38O6TbX7GftOfA/wR8bNcuLl7mTRdRsb/fLdWfyrdL/AA7l/wBmt6NOXJzI+czKvzVeQ+Nvjh+zL8KNDtYJ9H8yRI0/dfKqrIrfxNXlX/CpdE0+3lhh1JoYvvrDGi/99LXrfxw+E/jbQfEt14bm8QzSwqi/Zdz/ACsq/wAVeUa94V8VaOxSa83n/lky/wDs1eXWlVcruJy0Y04x0K3gjRLPTPH9qYZixEUm3Emc/Iai+OFkLjxNav5W4/YAuP8AgbUvw90i/tPG1pPezksEk3Koyv3D3qf4z6bNf69a7GYKtqudrYx87c1+uYRSl4AY5f8AUWvypGp57Do/zJN5zSBVrzn9qu6Sz+D2ozIP9c8cDbf4dzV7JZ6LNHNvdFG35XZl+aSvFv27o4dL+F+n2aO2+81mON1ZPuqvzV+EYelz4qJthOapVPGbXUP7NsYFs03pDEqv/vbap614m2/6h8Lt+bc9Y9xqD/ZfOSZv9nbWbJcvNIru+6vqua8D1Ix5ZNl3UteeZV/iP/oVYeoaxcySMiOyt/6DT7q4eBf9YrLWbeXCMv8As1jKXc0jsZeoSGS6+/uqKiT/AFx+lFaHTH4QooorMZ+kH7PP/KN1P+xL1j/0K6r836/SD9nn/lG6n/Yl6x/6FdV+b9ftfit/yJcg/wCwWP8A6TA4cJ8dT1Ciiivxg7gpVXc2z86bt+bNDLupR2AWkZc8GlpCd33KYC0UcAUUAHBFFFIq7aAFoop0XQ/Sp5gE2utJRS7RxUk8yBPvCrunrukGU3D+6tVkV+Plx81amhWvmXsSf8CoJP02/wCCAPgN4bP4pfFqaHZtgsdGtZlT+83mSL/3ztr781K4hW1eF32bX3bVr58/4JBeAZPh7+wPot/qttHFceMtcvNWuFZPm8lW8uJm/wCArXvF9N8zIm11/ut8qqv+9Xj1qjlVlEr2P2ipIsDEW0a/NGjN/ebb/tVTmZ/mTyYWeFG8pmX5lp02oom+FIdv8PzN/C1V7q6ka4MPk8bf9Yr/AC1P2TeMfeKGpW/nbP3zfu/71ZWoWaTKfveZ97zP4q244/OuFR4coqbnbf8A53VBdW8zQyTTfw/xRtu21nP2h20eXVo4rWtNn3O8KNv3/LHt+XbWPcaGvkul5tz8uyNlruJrNbpnRz/B91U+9/wKsjU9M3Wr/I27ay7Vf722r5eZeZrLb3jgtc8P+Swv97Db9yNfmrIvrfbGJkhkTsrL8u1a7W6t91v9pghXzVT51k+VlrCurSGS18lHVn3/AN37y0f3pGManL7pyTabbWcjbIWU/eVmrSEAtfDckLsJMWzkkchsgn+tTXlnbW1x/pKK0km75mXau2mFEXQXRWJX7O205xwQcc/Sv1/wPSjxBmLX/QJU/wDSqZ9fwo08TW/wP80eP6to6NbvZzRM6zf61f4d3+zXxX+1F4Rs/C/i50sLZk86VvN3fdr7zks5lmltvOVlbc27+Kvl/wDbS8FfbLdNehhwGdvu/wCzX43ga0frNuY+azCj7TC866HyzjZIJuOPm+arVuyM3nPJz/s1DJsjkZHTd/vUscaRtw9fRR2PnV8I+4bco2f+PU6GDaocbWbZUW794EdN1aAhRV3pDllT5FqeXsIYsfl7UT5lqVrhId3ko3/fVKtv5m5If++qRbcx/wCyNnzL/FQKUftFSRTN87jeW/vU+GF1+TZ/F/DVq3hTaqI/8e75kqaOHMjb0Xb/AHquOxMvM0fDlvuugiOzru/hr13wbeJp6hHRSsfzfNXmXhGFGukT5VP8FepaT4fudQjRzD5QVPvf89KvlhIUvdgeg+F/HWmnT3TyVRvuouz5q1F1ZNSVPs1rv2/Ku6vO9N8O38d8qGaT+Jm3V1+m3Ft4f0nfdXKs+z5VZvm3Ue7E55e8eKftdeG3VrfW0h27fldv71eGV9G/Hi4m8QfD+91KbbvjZW2/7NfOVKR3UZe4IwyOKWm5+7Tl+/8AlSNgpf4PxpvCr9KWgApyLtGKbUi/eCPSlsTLcsQp5kmE2/7y103h+12tvf5f96sDS4ftEjJs2LXSTSf2fpst191fK21BlLnOe8XXz3WqPDvXEPy/LWTSySeZKZH/AIvmojj81tnrWhtH3YmhoVr5lwH+b6V0sDeZu+fB/iVazdPh+zWq7E5b+Kp4ZHT92nCt9xqXwnPKRbbZIvkdNvzbaqLMkbHzH+b7qLV+P97HvR+dv/fVU5oUti00yKxZ/k3fw0c32SY/CXrO4eTYPOwy/Ltr72+M4P8AwwiwVhx4T0zBb629fnzHqLxyZfa3+zX6B/GNz/wwX5mCT/wiGlnp3/0ev1/ww/5E+ef9g0v/AEmZ9pwp/uWPf/Tp/lI+EJIfOc7/AOL+Jvu1UVvvI7tlfu1o3UHmKiPDtDL/AOPVWkh8uTzkRTt/u1+QR2Pih1oqxMUT5T/FWlZzWytsebcW/wDHay2aGQbNnzN/d+9uqeONI5hv+/IlEtgNONi0eyFMj+Kk8yHy9/RFqrHJ+8+TduX5amEM3yJDyjfeanHmDkLFvIi/xq39yjy9w853Zf8AeqBYHjff53Ozd/u1ZjuIW3v5e5W+/T5gMDXm8yR1PCx/+PVw998t0/b5q7XXJjJcSw7GVV/ib+H/AGa43U+bpuMfWpl8WhrTjyn0x/wTC+Kt18PPj3ZNE0ZS6XY/mf3v4a/oJ/4JLfFm/b9o3WvDd/Nutdc0tVXd8q+Yv8VfzHfAHxs/gD4k6V4kVGcWl/DK6r/d3Lur+h79gnXtN1CbRPjHoOpXUdvZ3Czu0e3/AFLL/F/7LXRTqRjGSZ5GZ1pYaqp/ZPq7/grP8B4fjJ8C9Z0q003znuLCSB2V/lk3Lt2tX8p/j/wnqvw98bax4E15GS70fUZrO4Xbt+ZW/wDQa/sNuNc0r4nfD3UtGmmW5+0WEn2K8ki/ds235Wr+U3/go98MfE/w5/aw8VXPiRGE2rapNdbvK2fxba9CvaphYzj0OTBuEMT/AIjwncF++/y/w/xULM5ZUd9oaoVkeRt4jwF+5T1VJG2F2+X+9Xl8x7XwlppH3Nv+5/dr65/4Jhn/AIknjBf7tzZD/wAdmr5B3Oy/O+1v9mvr/wD4JjBho3jAnvc2WP8Avmav0fwj/wCS8wvpU/8ATcz6jgxW4jov/F/6RI8K/aFkd/j14vTZwviG6+b/ALaGuYhuk2tJNwyptSun/aGL/wDC9vGEQ/j8R3Q/8iGuVt43ZdkKfKtfHZ7/AMjvFf8AXyf/AKUz57M/ezCt/il+bL0M27B/vf3vvVI1xMuVT7jffaoFd1Vn8lS1I0yKoR32mT5f+BV5RxRiXvMdlR0+UfxrvqzDN8xm8lXl+XYtVF+aRX8nPy/dWrkJ8tvJh2nd81TI2pxhGZcw6/6SkLNtT/V76uRs7Qr5gZd3/fVVFRNu9H2t/tVcFvuX/WY3J96uf3YnoU48pat5oY1XyNyfI2/d825qtQpCu1IUw7fw7arWscPkjhm/3atWak4KTNt+7tb+GseaZ2x5uXmRP9nf7OcP935fmpV2Qr8n3vvbaSDf86J/vf71OY3PmB4YW3Knz/PXQc9YVmk8zzng+Rvlfa9TW8iRzK/2n5I0bcuymNC0IfznwG+43+zUkEky7Rv37fmfd92toxPExHx8shsk1s1uZvmXd/EqVQuoyJF2eYq7/uird1HuZdm1U/2fl+b+KqepSTbdnnb/APgH3avl5Tm5vsnPafevJMiQ8FW/1jV23h/XE8lkd9jL825f4a8u02abzF+dv95a6CzvgzB9+4158ZfzH0R7N4b8UeXHFvuV+Zf4fvf71dx4X1u2WcOkqpuX591eB+H/ABQlqu+YqpVPkZa6jRfHASZvMm3fPudW/iWolzSjoVHl+0fSXh3xNDJHGiPHsVVbds+81ddpWseZBKiJHs/56fxLXzjofxAbzBNNMzpu3RQ/3WrqtK+IlzJMjw/Id/zs38S14uKjPm5kexg4xPaZPED2zLDpupRsrNtljb5mZf71Nm1aGa9DpDDlbfDbXb7v/wAVXndr4yeScv5yn+Hcv3m/2q0rPWnvo1fZsVW+fd8vzfw14lapy+9I+nwuHv8ACdW115qx3LvsK2/zq38P+9Ve4jcK+z96qt86slVLNk8s2yQswk+/N/eqz50z/Om5VV/lXf8AeWuD20paQPTjh6X2jntctdyp+6+Vvlf5vu/7VcLrGl3MzSpbOp8ttu7/AOKr0XULX7RE0bwsgkfcn+9XMalY2saumxlddyyqsXzbq9PBS9vM8TMKMactjx3xho/l7vJ2qfNbzd33a898Sab5TPEX3BX+Rtle8a5ocLK7ujOm3b8y/wDj1ee+KPDbrumRFLLuVGb+7/dr6/C+9HU+IxUZc/wntHwstXh/ZB+yuo3Dw7qIIH1nr52+H9rDJfKl4/l/JsXd/u19M/Dm3Mf7MYt2AH/EkvgQT0yZa8C8G6XMs2/tvXYtfuniW7ZNkn/YNH/0mB7nGLf1LL7f8+l+UTsvDum+T5bP5Y2/Krf3q7Xw7Z2zWZSNJDufbukT7y1j+H4XaSOGEfO33a7LQ9NeO6Z3RSZF3f7tfjMj4uPu6Faz0+ETNsfcJN2+rEMKRwzQ2z+bM21UZn2rtrSuLN2meF4V2fd3L92orC1ht9014uyH7zSMm7btrjq04y0Z2U5cseYk8RWb+E/Ccvjm5RWWH91b7l+9J/u18q/Ha8m1XQ7m/vE+0brhXlbb8zfN/FX0N+1Jqzt/Ynh2N5vsn2fz/LVtqyfL8rV88/FCF5PBt8lh9/yv3Sr8zVth6cIxM/bSqS0+E8w8TfEKbQ/DZtdKfZuXbtjryG8tda1u9+1TCSRpG/irqm17TftEUOp8ruXzVb/0GvY/hd4+/Zp0eEP4q8K3F5L5W1FjZV2/7taR5VK8hy9rH4D5/wBN+HPiHULhE+xvhm27tlddL8ONF+H1n9v8eSeTNs/0ezX5pJG/vN/dr174hftIfD3SbO4sPg98PbW2m8rbb3l187r/ALq/3q+bvFF14h8QatLqus3M000j7mkmatfaR2gKn7WWtQl1zxN/bV4ttDttrb+COH7tQMqbWS2/76rJWN9x+RhRHJcq2yN2qNfiNuX+UvJZlW+d1ct/eqwtvDCux32t96qEM0zN8/y7fldqvW7PMy/e2/3m/iqjOXulu3td0Y8zrXcfDXQ4Lq4abZ86xMyLt/irkbE2y/O78t/DXf8Age6/s2MO/wAiM3zs1KK5SeX2m4y88P21jm81KZlTzd27dXDazrU2u6t9gs5pPJjf5F/hWuh+JniIaxeyab4c3GST7+1/lVawrfwvqXhvw9N4hubZi4X5G/u0x/DI5vxQ0J1hvI/hVQ/+9WbvX1p80jyuzzNlmfczVEy7aDoQ+iims2G49KBjqKKKXxAIq45NLRRR8QBRRRRyoBFXbS0qru5TpQy7TimAY249f4qlt4/3io/FRLwu+rOnIJJgnks5Zv4aXMiJS5UftF/waW6JeeHfi18RfGGzamqeDZrJmZFZfLh2yfe/vbmr76+OUk2jeLnvHdvKml2QMqbVVq+PP+Dea0s/g58OvGOoaq7Qy2/h+3tftEa/euriTzGj/wC/arX1d8aviJ4eutLXUrq8hfyWZoo2dV3V2U6sPZHyWKcqlY+WP2uPFmm2vjCz+23W77VB+9jh/wBn+KvFtQ8ZWF9uhO1Sqfwv/D/u1e/aY+JWleNfHxtobCREt4ttvMqbl+Zvm2tXlmqeIobXc8L/ACqrbG2fM1eLWxHNPlN4e6jsvCd79p8XQBJlK5l4Axn5TT/idOsWt2wKZLW4CnH+0a5X4TXsl14+thKQCEkxj+IbGrc+MG9vEVoI5FTZaZZm92YD9RX69gqkl9H/ABjf/QWvypBF8xl2947TN8/mlX3bm/8AQa+bf+CgGqRyr4Y0dbmRna8mnlhZ9y/d+Vq9xm1pLW1W5mbfKvyytH/F/tV8sftha1c6t8QtKtJm+W3tZGi+fd8rN96vxHCyhLERR2YOP708xuptyhPu1VuLpFxAn3vvfLRcSOqtvfj+7uqtdS+XGHSGvbl7x6luWVitqF5uXf2rPvJtu3f92rV1Nt++/wArf3apNvaPe6bl2VXulRKv/LWik2/Nmlo+E3CiiijlA/SD9nn/AJRup/2Jesf+hXVfm/X6Qfs8/wDKN1P+xL1j/wBCuq/N1G7H8K/afFZXyXIP+wWP/pMDhwnx1PUdRQw3daK/FDuCimqMrinFd3FABRRRV8qAKKC23mkVdtMBeCKXadu6hW29qAGOMrml8JMgY7jSUm75sUtMoKXcdu2hhtXFC4b5O9Zkx3JLdXDL/tVv+HLCbUb6Kws+biaVYItv8TM23/2asGNEUAua+hP+Ccvwgs/jP+1p4F8IahCz2f8Abcd7qP7rcvk2/wC8b/0FaitUjTpyl2FGMqlWMUftB8LPDKfCn4K+CfhpDbLEmg+FLOzlb7vzeXub5f8AearGrao8m5ESMxfeXa235aZ4s1ya61y5nv8Ac4kut0S71/1bfd21zepXG75Em3H+H+9/wKvlI1faT5n1PWq0fZqxY+1TSTK7vG6r8rL/AHv7tC3xe4TyZmX+F12fK1ZbTJdQt5txk72+ValtZPKuFR9vyr8kn96vQjLml7xzxp8psxs8lps2YfZtiqOZfs6ukn+ysvz/ACtUUN00y/67c6/xL/DUUc1sqrv5dnbey/MrUc0fiOjl/lHNC/kult+7WT5m/vKtZVxax3VvK/3fkbYzVof6M2XgTcV+XduqrfQwrvnTb9751/u1VPYVSXKc1eWexm3zbmZ1bayf6vbXPajpqPm2T91tl3eZ/tV1OrfKuxAzs33Fb5WZf9muY1SN4VZz5mJG3RNu3L/wKum3LHU4+b3vdMO+LtL0YozbU8z/ANlqs8Z/s+SJ4wuY2BUdB14q/fX1tJI1tNcqrRxfJ8+2qJIFi5WTOEb5j+NfrvgnCEc7zCy1+q1P/SoH23CElLE1tf8Al2/zRxDQ7bib7NZqh835/wDppXln7Tngv/hIvBNzctCryRqz/wC6teyzKtxdBP4Vi3blTduaub8SaDYa1o89teJJ/pETJLGybvL+WvwGMpRqxcTzJU41sLyH5ma1pP8AZuoTWbx7vLb726qGHVjv+Xb/ALFegfHTwj/wi/iq5h+7ulb5dteeyN+89q+zpfvIRZ8hKPJPlZF5iLGe/wA33qt2uqBCUf5l2VR2hW+T71OVZNy7Dz96nylG5b3yNj58f3Vp7SR+cz7Mlqxo45t3lp/vbqtWt1tk2TOqlv4qqJlyovbZuyZ/2qmWR2Vdgz/C6tUEVx91P7z1PD/pDeWtUHuG14ZvktbpXdMbf4a9k8H+NIVhS2ePLRpuVVrwuzjeGZHM25v9l66bRNUurVvMfdj/AGmpR934jOpHm+E9d1bxheXV150MKqq/NtX+9WPdapqOrXBmmdid21I/7tc3H4301secW3t/Ev3Vrb0L4g+G4VSaZFkdX+dvu0+axPw/ZJPiJpd5cfDe9sPIYLJB95k+avmaWNo5WRhyvDV9jTeLPD3izwq+lWd1Gr7Gby2/vV8n+ONGl0XxNd2Uibdtw22g2oe7LlMeiiig6QopGOBxS0AKn3hUsKuxb/dqJRuNTwr90VmRLc1dBgeRlTZ/uVP4vvHhtEsy/Lffq14ZjRlVJk27v4mrn/El4L3VJJE4VflWq90iPvFGtDQ7dJJWebd/sbapRQPM42c1p6aqJMLZ+mfvVRVSX2TV/wBav31X/wBmqu37xt/k/df5KvrDHJG1Zl1vt5tnzfN/DS5oxiY+zNfS5kklG9MBvlqe8t/MjCPtcqn8P8NZek3yeds+6W/vVrwsk0Z+fYd3zNRHYqUTFuoXjuVdPut99a/QT4yyFP2AVkB5/wCEP0nn/wABq+D7q1RszI27/ar7t+O+6L/gn3J6r4Q0r+dtX694YO+U55/2DS/9JmfYcJv/AGPHr/p0/wAmfDdrfPIoSZP/ALKpWjSTbcom3a27bWHZ322b+Iqvzbm+7W1FeQSRkQzZLLX5DzcsT4zl5ZleGN4WPnJ96rS7WjDpub/e/hpVt3ZmTeq7v/HabHHPCzb/AJt3yoq/w0fEHLyj44ZIPn61ZhWaSPbs2/J8lQpHcsE2dP7tTRs63P32/wCBU5e6RERm8tvJ27mZPmajzNsbDG35PmZadNHM0iu83H8LMtRXEyeS6Tvhv71KS5g+EwdY2bpX35Lf3a5S7YSNsT/x6um1aZ41O9Np2ferl7hjIx3n+Kj/AAm1Pcn0a4+yX6TbsfNX7L/8Ek/2jE1r4A/8Il/as00iq1vdNH8rfL8y1+Lu5lO9etfaf/BJH40P4Y+KqeD7yRtmobVijVvvSf8A7Nc9enOpSlynnZ5hnXwM0j93f2c/2nIfB9mnhLx/rW3TpGVF/vQ7v4t1flv/AMF+vhDpWofErVPiL4PuY7m2s71ZUa1+ZWt5vl3V9k+NNHmttmq6PMxh2xs/z/Kzf/FV4R+1X4Bf4neHdS0G7f5NY0aRJZJt3ysvzLt/2t1edk2ZV6K+qVz4PJM0q/WFQqfZPx2kVFdvkZX/ALrU+Nk279jbm/hqbWNL1DSdSutKvE2y2c7QOv8AtK22ooY3/ubW2f8AfNe7KPQ/Q4y5o3LEapIzBOd1fYH/AATLVRo3i9lGM3Nl/wCgzV8iRqiqd4ytfXv/AATQTZo/i4KwK/aLLaR/uzV+keEqkuPcL6VP/Tcz63g124jor/F/6Szwr9oREPx58WsIW3f8JFdfN/20Ncqruql9nzf3Vrrf2g02/HjxUSvH/CRXTf8AkQ1y/l/N5ao3zPuRq+Ozu39uYpf9PJ/+lM+bzPm/tCt/il+bEhk2rvTd8zfdp7N5279xt2/xNU0UE3yps2/xfL/dohgPzP8ANhv738NeV9g4/thDE7TMd+1fvPWhZq8knyIu1fuVWjt3j++6/wB7dVm2ZCwT74ao+yaxj7+hoRnyY9nys392rlmz7hv2tt+bczVRtm3SfIm1v4GarUNvtkCXO5mX77LXPKPMenSiXY1Rt8ny7W+6qtViz+aHzH3I235lb5t1VYY3WRZoYf49taNuzs2/f8v3flT71R7stjsUuYkt0RvKmcfJs+6v8VSJavIxcXjOsKfOuz7tLHC6xo6fOf4dvzbf9mp4ftKr5zn5G/iV/vf71MwqR5veIpLXzJPkTcu7+L5adHbw/Nbfd/ubamkj8lmd02bfvfxUNb7pN6Ozf3G2bflropy+yeNiqc+a5VlRVjXcfl3Ns3VRvFRYWfYvzVpXSo2zzNrfN91X/iqheQpbyfu9u2T+Gteb3fdOWMfe9483jk2t53nNuZ/lWrVnceZGzzIw8tdu7f8AerN+0TSSI/ULVu1k3R/I7Lt/iavLj8J7cDZs7942CbF2qv8AC33f96r1neeSyzJM27+8r1gWd0/nNbOn+sXdWjaNtwkMfH3dv8VL7HKb05cx2Gk+JHk+RJpCy/drtvDupagVXZIuJPl2t/DXm/h9X85/Mh3f8D212vhu68tt8FzGjq6/eWvKxkf5T6DA+9a56N4dupvM2TXLLtTbF/d3V3Hh2J7yQv8AbN8qrtddm5WrzzQ7pFUeWi7mlX7RJIm5v+A16H4UmT90j7lfd8nlrXzWIp8sZcx9Zg5fCjsdPheSNHm4Vl+RVT5d1aCwokiw7GU/eT/ZWovDtu8ccXnD5l+bb/eroY4Zl+fKurfN5a/w15sOaM7HrcseXmObvrFIIlmtkVZF3fvJHrA1C38u3E15bfvmdmVlbd/FXY6pp0LM38C7d33N22sfWLWFYRD9mUuq/eVfvLXtYX93seHmC5tbHCa1b7reZNi+az7fvfK1cT4i0O2mhZPJVPM+7t+bbXpfibSUtZNk0Pzt/CzbfLrmr6xhW3eG2jYyt9z+Kvq8JKPLzI+Hx0eaXvHWeDbZIfgObZwNv9lXYOemCZK8b0nSU8zZ5Klm+ZG/h2/w17l4bt1X4Sm1miCD+zrhXXsPv5ryzTNPSGIPCih2/i/h21+8+JbTybJE/wDoGj/6TA6uNLrC5e1/z6X5RNzw/pbIsdy6LFu/8d/2q63TbObc3yW+9UVd275mrnNLaGHykdN275d0f/s1dHpMiXDBLZ2bd/49/u1+Oy/unxMXyllYxeKZssiL8sqr8u3bXJeK/HGm6xcXOm6NNI0FjtWWOOX/AFjfxf8AAqPi38RoPAfh+Y2dzCb+4iZIoV/5Z/L96vO/hGZodH/tW88wtqkrPEzfLu/vNWEufnOipL3Trvj1O+seE/B3jmGZjp+tadvi+0LuaNl3Lt/2du2vCPFGpJ5MlhMnzN81er+LtSe8+C9/4G1PUma58G6tNPp27/lpbyfNtX/ZrwyS6e6U6leJuVk+Vfu7qJfETTly+6zwf4j6Fc6X4onhSNtn3kb/AHq5zzrhR99gK9X8dXmm6lqmblNzfd/3VrmtQ8BwszTWsy+Uy/eD1fLM6+Y5O31a8t2DpMwrptB+ImkC3Fh4k0fzkb780Z+asi88I3NuzbHyn8LVQm0ieKTy/MUk1oP3ep3LXHw11lv9GuFt2b+Gaib4f6VJH52m6layqz/djlrgJLaaNv8AVtt/vVNCupIuYJW/4C9HNL4ZC9mdPefD+/hdvJhU/wDA6rN4XvIVR3TarJ/frGTWtXtFBS8k3f7TU0a3qTf8vLf3vmalze6HL/MdFa2cNuyPNcqrK3zr96tqGR7zZD5jOFX+/trirXVn8xZJpuV/vVv+HfE0K6pG7/Ntf5lb+Kjm5hcvuHoOj6Homh2f2m88tJWVW8vZWV4k8TG8Y6b9jj+zN9+P+HbVu8l03XLhZodWjSST5dsj7aIfDum2sJmv7nzP7qq25v8AdojymSl/dOOl8KeGdVsZFgdoLn70S/w1xF3aTWd08EowyttNeu61oNna2ralZvHEf4l3/Mq1wHjaSw1K8a7sCvmR8S7f4qJfEbU5HOAE9Kcq7aFXbQzY4FL4TYWgNu5oYbutIq7akBaKRjgcUtXHYAoopdjelMA/g/GlaR2WlWPb99PmpfLf7j9aXKjMYoI+VDx3rtvgl4bh1zxnbSXO1orX9/KrDcrKv8NcfBD8wXNfQn7NXw5tlsV17UIZEEj7tzL8rL/drGtUjRhqc+KrezpSPsT4K/tTeMPgp8H7jwX4SSFJ9a1ePUri6b70e2Py1j/4DVKT40fFH4hak954q8W3XlRsyxQtP+72t95tteZWlvNfXCb9uyN2Tds+bb/dWuhhjMNq6JNHskdfNbZ8y14ft6tSR89GpKT94t+INavJr4F7ld6t96Nv4W/9mpVDzfJMm1t38TVWhhsLaZEuRHMytuSNl3bv96pri6kmuGS2s1iT70rNUSlyxL5TrPhOnk+NrOPaD8k2GK4P3DWj8apnXxHbwRKNzaf95ug+dqzfhUoHjqyO5WzDJtO7LY2Gr/xyuDF4js0W3Z/9Dy2JdoI3txX7dlf/ACj3jeb/AKC1+VIPhjocfJpthYyNc397uYJ86qny18k/tYapZ6h8cJrW2+VLPTo4k/8AQq+n9e1D7Pbb5n/hZU+f+H/4qvjn4uXqap8U9Zu4Yfl81URWbcy7Vr8Xy2PNX5jtwP8AF5jAl+b5KhvIXaFkRMLv3f71XI7dCux9oP8AeqvfXibWRP4fvf7Ve/yo9P8AxGRNb7c1HI22H50w1PupH3NDs3f7v8NU5pnk3I75qYxNIkH8W+iiiqlsbBSL8u40tFKIH6Qfs8/8o3U/7EvWP/Qrqvzfr9IP2ef+Ubqf9iXrH/oV1X5v1+0+K3/IlyD/ALBY/wDpMDhwnx1PUIztOXGRQ43nJpvXbTq/F47HcG7c2+ikVdtLTAKKKKzAR/umnK3bZndTX+6aFXHAoAcVY9qP4/xoY5bikKbuDxitCNmFFFL91PrWZYbG9KGb5VoVttG3a3I+Wq+EB9vvZxF8vzfxV+kH/BDX4O3lv4l8V/H54Gb+xdLj0nTm3/KtxcfNJ/5DWvzp0S0lvNQiVOBvX5ttfth/wTn+E/8AwpT9jfw3Z6lCsWoeIribW9WVdysvmfLEv/fK/wDj1eRnGI9jhH5npZPhfrOM9D2i+iSTe8zqvmJ8vy7q564VFbek0b/wsy/w/wC9WjqFwkrMjo0bK38T/My1l/aobVmfepLP83y18jha04e9I+ixWFK3lo0ium3K/wAS/LuqWOGDKb/m8v8AhptxMjYh3xosn3I9/wA1Ekc23y9igfdXb81evQlzazPFqU+WZFJqU0V0qTcIqMqMvy/99VHcalOWhdHYKr/Ky/7vzLTbqRvu/Y9vlptfc/8ArP8AarMmZLaTZbTKBvZZWb+Gu2jHm91HPL92bK6h51u00M21v7rfe/2qguNWhmV2srnczJ95vlrJtr2G1mebC7PurJJ95qikvN8b3EyMPL/5ZtXdTpzicUqnMTXEyTKby2TfIyfPu/h/2qwNTXzpnR7yPa3y/wCzVu9voZIVkdGiVUVtv8SrWNqV15as7w+Zt+Z2+7t/+KrflMoyKF02mx75kRS391lVmZf726q0eZdIbY28tE2CR1JzVHWrx5IHhhmt2RX2fu/4atWEijQvNReBE5APtmv1vwVhFZ1mHL/0C1P/AEqB9twfK+KrP/p3L80YDTTRwxrsZlVGVFj/AIW/2qxtckuLyGR9jJIvzMsfyrt21cmaG43pM7I7MrLtes7WryaOxmyVZ9jKys/zV+A+zlGem55NKtFQPjL9qyxhvtWluUfL+a33a8EmaRZG2c19EfG7R/t2qXaIkbM27ZXgeqWr29w8KH5l+X/Zr6ihHlpRPm6kuarLmM5bd3z/AHv9mrcMChc7GojVmb9y6/Kn3aGmeNtnzf7u6to+8TLm5hsjeSqpDTIVQyF/4qV1dm5p3lPtH8IpBIsQs7Kp2fN/erSs5DC2/ZuaqFu3SP7wZdtW4WSNU3/+O1UiTSsZE8xYXdd33t1dJo+n/wBqYh8ln3cKq1ws2oeQ2U5K/wAVdH4K8bPpd0iO+4fd21PxBL3Tb1D4d62rb7aGRU/grJvvC2vab99G/vLuSvXtH+IlneadDD+53fxbv4qW48TaVds/nabC6q/z7YqKcomMubmPIdL1zWdHul4YfP8AK392tTxxodt470p9VgRVvIV+bd/y0rubzw34M8SSBLbbaT/e2yVb0v4S3Nq2+0v43j/uxtTj8IlLld+U+XpoJreZ45kwV+VqZnJ612/x08G/8Ij4sZIn3JcJv/3Wrh1XbWnKdsZc0RQ27mikVdtLSKFVX3Vf0/5mEOzP8W6qEbDdnexrd8NQxzSMmzlv4amRlM1ZvJ0/RXmLsr+V8rVxrM7MXfq1dH43uBbwx6bF/F80tc/b2/mZfY2F/u0+ZFR90uaX5MJCTYNXJIyJt43bfvfLWXHHNHMuz738O6tKKRmjG/70dHvmcpRNfTZHaHzmh+X5dtQ6pbuqibY25vut/dqzpsyCLe/z/wAPy1FqkbqvD7xt/v8A3aI/3jP4fhMmS4fbnfyv8VbmkyOzfI+Rt+7WE3yts7/xVoabePbrscUw5u5u3EMzKP7lfcnx4Tzf2AJY1bGfCOl4I+tvXwzZz+fC3z79yfxV92fGdFk/YLKBcg+EdLwP/Aev1zwud8pzv/sGl/6TM+z4V0weP/69P8pH55tG8bfK/H92rGlyfZ5EfDLt/wBqrF9a/MxRFX+7uqlI3lrv2NivyM+LjLmN9bxJI/kjbc38VSrJNNJsT/vmsSxurlWZ/lxWnZ3+66SEv87fM9A5fEX2WONw7o26mf6tfMfduqe6kmjVU37hsqHb5g+/8mzc0jPQOQ/c8ny+c2GT5VaqepL5MZLpu/2t9WZWeM/PD5x+6rf7NZ2qt5a+c52qz/dpx5+UmXLI57WLwtv4Ynf96sNvmYvWxrVx95E/i/hrGpG9PYK7/wDZv8ay+CfizomvB1RYb+Nvm+796uAq1pN09nfxzI+Nrbt1AVI88LH9I/wh8P6l8Qv2WdJ+MGm20NxYNKsEskfytGzL8skleaeMvAt/dabd6zoFy0otWZ/MjbdXD/8ABGP9paH4ofst6j8B/FuvNCjQSQXC/wAW5V/dN/s/erQ+HPxI1X4P/EK8+EXxIvPtFvHcNAl5JF8qx/7VKrk0cTR+s4de9H4j8rzfBU8vzRTjpc/Kr9sfwOngv9obxCiWzQ299dfaLWNn3N8y/M3/AH1ury+H/VHen++1fdn/AAVo+Dtm0cPxL0HTY9kN1Iktxu+aaNvustfDNrCjf6N8oVf7zVvJNwiz7nLsRDFYWLH6evmN5bpsZfu7q+v/APgmmjx6L4tV8Em4sjke6zV8kWquzNsO5t33m/u19df8E2Tu0fxa3rc2fH/AZq/RvCX/AJL3C+lT/wBNzPtuClbiSj/29/6RI8Q+Puz/AIXj4udl3ga/c5T/ALaGues7W28tZndlMn3K6347Wu743+KF2L83iG5bcf8Aroa5lYUVgmzmT5V/vV8dnvL/AG3iv+vk/wD0pnz+ZytjqzX88vzZFJFuVk6fPtZv4qfDG8ah9/zbPu7PvVI1m+7+Jtvy7qdItzHGqQo2Y/uNXly5Dh5ve1K0mRF9xgu75FqW1VFXL8fxf71KqpMrb933/m3Utvb7d0kL7t3y7aykbU5e9EuW7ozJ91P/AGWrluPMk+d2Ct8q1BZ2/wAo3ov+0tXrPfErO+5v/Hq5/dPVpyLdtHDG6QpM23b91qsiGG3xsk3Fm+dt9V7fzmwiSLtZdv8A9jVq1je4bfInG77tZ8vKdnN7vulm2berQxvsff8AMy/dqzFb+ZD+8TaqtVO3CQt86YVW3ffq1GUWFfOfPybmZf4qqP8AeOeQeWjTOk24r/Cu/wD9Bp6yPFtZ9zJs+6vzf99UkLQvJ5zx+Wnlfd/i3f7NSQySLC8O9Q7fcbfW9P3ZHjYzmlsVpPmKOm5h93b93bVC+mSNf4dsO75t1X5Fe52vMmfl+9/DuqnqUNmpZHdWRtu9fvKrV0nHGPL8R5Uv2m3/AIN2779WbX94uxw3/AabIqLIGj6VYhx5yuifK38P+1Xi8yPoIx5iza26FfMjjw7fKlaNqmZEfHy7vnqpDCkaq6SM21vvN/FV21hmkf5Pvf7VRLm+ydtGJs6KqW7KmMszfP8APXXaLJCtx5Pk/LtXczfwrXJ6Xa7sfZnzI332/u12Whx7I0y6su/5mrzcRKZ7uFj2O38P3Ft5kaI/Ej133hmaFpvs0ybfLb5Nz/NXnGiyQqyRyQsoX+9/E3+zXX6FI8zR3MN78y/wsu5m/wCBV4FT3uY+jw8pRPVvDdwY40hm+5G+1tv3q7W3jE8KXMzttk+WJa8z8P3SWsjW8KN53yyvul3K3y13fh+dJIUciP8Ady/Iv8S15vLGnL3T2Iy5oamm0LtbvMm3cq/3Kw9XtIZVR32n5fmkX5drV0Sf6n5EVir7tu75mrO1KztmWR96/Km5vk+Vfmr1MJ73unkYzlOLvtPtriTznSRvMRt6yfeWsTUNDtre1kSGTe3/ADzX5q6rUtPuZpGfzl+X+FnrEu2dGNnBDv8A4UZV2qu7/ar6bCRltFnxWYe9zOxpaZbKngk2rDj7JKDg+u6vOv7L+zq9ym0Q7ti7q9Mso3fww0ccQDGCQKue/wA2K4u40+aRdkyNG2zcyr/DX774lTtlGRf9g0f/AEmB18YQ5sFgP+vS/KJm6P50MSQwt80n3dvy1f1jxJbeGdMa/mudrqn7r/ab/ZqnfWv2PF4qM38TfJ92vKPil44fULoWENyxSNPlXf8Aw1+Pz+I+Epx98wfFniDUvGXjTfePubdti2/N8v8AFXex6lDoun6H9js1kSO/aK6VU/1e5fl/4DXGeCbWG3sTquxvNm/1Uezd8taOoeJLO10G60q5dkmuIN1qu/5lkX7rUpR5Y8pfNzfCHxU1qw0fxBBrdy7Q2mof6LqNuybo9u75Wb/0GvFvirqiaDeTW2muzWDfNZf7K/71d54q16z8UeG5X1iFsN+7aPd8zMv3q8Z8UagmszS6VNNJ/ovyru/i/u1n7ppGP8xyt1cTSSPc3LttZ/4arWfiLU9LVw/zQ/3m/ho1C6muJnt/ubf4Veq1vIkjPbTfP5ny1fLzGxsQ69DeQ75nU/3qq3C2cm14UVNtYOoWt5pswTe3ltSQ6xJ8qSfrSDl/lNCSFAweb/gG2qupahDBH5EMK/7bfxU2S6RkZ8sStUJ980hffndVy+EqPvfERySNI2+kyGHBWpI7V2Vn9qlW12rh0o5UXzRKx+4PrTo5HVg6NytTpa+YSWX/AIDUn2FF+4agRu+GfEkc0KWV583zfJu/hre+y6k0zPp82V+9XBw27rcfI+K7zwnqTxwoknzv/C1BlL+6QXi63dK9hczMEZP4lrNTwy9vvkfaVVf4l+9Xd6hqVh5av5G41SuLVLiT9ynzN/DVxjMiXus8jnjkinaKRMYblabXXeOPCr731K3++v3465Gj/EdUZcwUUUUe+UFFFFHMgClCljhaWLofpTmyozioJluKu9k+ROf4mpHV2P8AdajG1dvyt/srVizs5riZIURvm/8AQqrmROx0/wALfh5qXjzxFDpVnDuXer3Df3Vr6+8H+B007T4dBsvM8mPb8v3d1Zv7IPwt0HwP4Q/tjxPpM1xqGobZfMX7sK/wq1ewx+KPDEcM8KabHskXam5f/QWrxMVW9tK0Tw8RW9tU5bnLNoOsRKYXSOLa/wArf3f9qpbXw7DbyKb+WR3/AI/9n/vmtS81rSmkRHePYy7nX+Hbu+WmyXln5zbPlK7m3L/drzpfvI2OL3Y+6VLeGzhVvJhWU793zf8AoNQNcuN3nbd0n3vL+7Vm4VJmZzMyKvzbt/zNUDKnzOY127t21azlyx3kXGXue8dP8I5JpvH9tK+zYUl2gdR8jVc+P8xi8QWvlJukNiNo/wCBtVH4PFG8fW0kM8mDBIGjZePuGtH46zRQeKbKWcttWxyAvc72r96y3ll9HvGf9ha/KkF1Y4G38OJNG9/fuyBn+Ztv8VfEvjG8e88fa9eRupaTVptu1dv8VfaXjjxVZ+G/D9zf/bGxJEzvG0v+rbbXxHDsvNQurxPmWaeSRmb/AGmr8ey+MT0sD8LZA0jtu86b73/jtQyWPmR74d2f9pq01sxJGziHb/D9ynR6bMI9mF/4FXsnb8PKYjaTCy797fLWZqNktv8AMiY9q7D+x3klDuMLs3bW/irH8Uaa8No03b+GlKPKXTlzHN0UUVB0Cb19aWiitAP0g/Z5/wCUbqf9iXrH/oV1X5v1+kH7PP8AyjdT/sS9Y/8AQrqvzeZscCv2fxW/5EuQf9gsf/SYHDhPjqeotFFFfi/947gooopgFFFIzeiVmA5RuNCfeFNf7ppY8pQAqv8ALx+FJIibsRmlYfNj1pKqQCLv705/vGkop8qAKXc8h+akUN61JCuXAc/epe6Znr/7F/wUufjf8efDfw9SFtmralGkr/wrGrbpP/Ha/cXVobC12aboO2Gxt4o7eyhVfljjjXaq/wDjtfn7/wAEX/gz9jXWvjfqulRuLGBtO06SZNv7yT7zbv7yrX3tcSTRwmYwN/u/3a+Bz3FyqYzk+yj9A4cy/wBnhPbS+0Zd5dFf9GmdX3S7E3N826s+4uHjLQ2ybv4n3fdq1fTPCsyJCwT5WfcnzbqqTL5jOmyOXdt/3vu/drxvby5/7p6lbCxqcyZPZw/MP9Tv/wDQastH9li/f7RG3937y1nxslvMieS33dztv/iq4l1ugX7TDtT7zru+7XbTx/tDyamB5djPvvlaO58jcGfbtZvmZa5y8jtlhUuV3+a3y7/vbm+7urqdcuraSMzTP/HtXb/DXK6tdQq0mLzlfuLs/wDHq97A4jueLjsM47le6kh+z7+rRv8AKq/w/wCzVZtReONv9Zuk+/UF5qVszF3diknzI38LLWHfaw8dx5KO2N+1vl+Va9unUj/MeBUjOJfvtWCyeT5zI+z/AJ6/NWJq2rbiYQiq+7d/rdytWTNfP5zfafl3S7dq/d21l3195d2yfaV/6ZK3/wAVWr2MeYtaheHb5lsixuy/vdvzbq2tJmz4OE20nFtIcMc5xurhptYDbUuU2M275V+V91dnoMsZ8BiQfdW1lHJ7AsP6V+w+DEEs5x9v+gWp/wClQPs+C5Xxlf8A69y/NHHXF8kMgjAyqqzP/stVC+urmPTbl3TzX8r/AIF/vNTI7yG4mMz/ACrJubav3Y6y/Fl4lnodzfpc7HZGX5X2/L/dr8QnTjz/AAnzNOtywPl79orxYmizSwr/AK64VlRm/wCWf+7XjGqR/ao47nfncm7dW9+0J4o/tzxlJDCu2KNvk+euc0u4e403yX/hr1+blhGxwy973ilGvlMU2fx0SRjdvd8VbktNqPsRmP8AHt/hqGRfupsz/tVp7nxEkDfu8fxUsMjtJv8AO+X+7UEkjqp7/PUTSOq1BUY8xr6bG810uybhv4a2JtLd/wDVpXPaXefZ5ld3xXVaXrltLb+X90/3qr7RnLYzbjQn+d0Rv+BVW/s28hdc7d/+zXSeYny/xf7NTR29sy/6j5lp8qDmMLTdU1iz2p5zKyv8ldNo/jbVYfkmDAs/zs3zVnNBCy79i/K/3Wpyy+T9yH733KOWURSkd7peoWesR+TdN5TyLteRflauk0qy1u2kjis79pQybfv/AC/8Cry/T/tPnJ/e+9uZq9b8B6x/Y+hvquq/c2/Kv/stHwwJly83Mef/ALSvha5m0i21sbWMPyy7W+7/AL1eG19A+NvFln4j02/hvHzDMrLEv3tteATBFmfZ93dT5uY3pjaKKKDYlgP7xQ4rpfDS/Z5Xnd9u1Nz7f4a5+xh3Scjd/erpppIdL8OvKj/Oy7drLU/FIwlvoc3rF9/aWqS3Mjs3bNWdJk8hPJcKwb5ttZ0a/NvFaenw/aGXen/AafxDkJdKizDZDt/2t1TJvjZf92ri6Wkm7ftbbS/2eVXGzHyVXwkcyHWd5/y28j733lqSZluY2hdGVKgt4fL++mV+7uVasrC6t8ny1HL9kPd5inJp6s2+Onra+WRvmqeON5ptj/LUv2fcuxIfm/vNT+EYiK8b7Iptvz/ItfffxpkC/sEGQN/zKOlkH/wHr4E+zuuU+Yn/ANBr75+NikfsCldhJHhHShgfW3r9f8MP+RTnn/YNL/0mZ9hwp/ueP/69P8pHwVc3HmTeS6bv92qzKm0O6NtWrKo64kmjxt/u1Ktv5keOu75ttfkMvePjI+6VIYfMO/qKuW8yWr/6nll/75oht1jbYE+XdTVh23D/ACMF/wBqlzIcpcxM19959/zbPu05pn8vYlRRRw/65x937tS/IzB3RlH96q5Y/ET78Szbtt43/wC1/wACrN1Ro2V/kZt3y7anbzlUun3W6bWrPvr4Q2+zf/F/FSBRly2MHVJELkbPutVCb5tz7PvVevpEkbekP3qz5Gz/AANQbQG1NbofMXZ96oMfvAuKt29u7SeZ5O6lzIuW59k/8Et/jvN8IfiNaSzXMf8ApE+147hvlZv4a+0/2kfiFpHxO+IVvr2laCti8lmv2xd3yNcf3lr8r/hZdTaRHFqlg7QyRvueRU+avuv9m39qnwl8TtDtfA3xIeG2v7WLZa3UkSqzNXtZLj6WCr+/8Mj5DiDKpY+HND4j2ib4C+Lfjt+zbqr6xon2qw2TW9vMqs22RVb5Wr8qNa8O3/hnWrvQdSt/Jns52ieH723a1fv9/wAE4Lyw0vUPEHwP8c38b6R4os9thNIq7d23crK1fkh/wVO/Z3f9n/8AbC8SaPb2fl2GoXTTRMv/AI83/Aq681p4ed50jmya+H5KUtP8z5xjV2kZIfl/3a+tf+Cb8ax6L4rC8j7RZ8/8Bmr5PtY3yHL4WvrD/gm/s/sTxV5aYH2iz5PU/LNX1XhN/wAl5hfSp/6bmfqXBcubiSj/ANvf+kSPH/jox/4XT4phdWA/t65ZX/u/vDXNeX+8TyeS33Gk/wDHq6X46KX+N3ikAKSNdudo/wC2hrmbeSWEbETb/CzN/DXx2ef8jvFf9fJ/+lM+czPTMK3+KX5smaP94d78L/yzqKZf33nI+x/4lo+eSTyelOaP94H35aRNvy15EY8pzS+EZ5PmL5z+Wdz0+1j8uOSZPlLP96nRqkmLZ4fu/fVf4aFLxx5Taqfx7qXxRF7seUnhj8pw/nfe+9V9bvy32Q3OF/2UrP8AOdV2I6/N8u6pI7h4/wDRn+f+F/n+9WMonqUfdgasMnkso2fP/A1WfOeXY/k8bvnjX+GsyG4+YR79qr/eepIWQqyJ5gMn/LSN/u1h9s64yNX9yqu7ybwrfd+7Uy3HnSMU3Afd2t92syGTcu9JtwZ/96rDXD+c6Ptx975aOb7JFSXMi5DNMriF0+6/zsv3ammkSSP7m1N38X3lqrDMi5jmPLL92rMcz7i/7tg3y/NXRH+U8rEcvLoElvJJE3+kfKv91KgvFT5/J3bWSrZt3+zo6Pv3fwx/w1XuGfbvNzt3ffVlrWP8qPN+H4jziS38lvs2/wC98u3Z/FT7ddzYdPm/2qmmDyXXz7nH8bbP4v71TLbozoifc+9uavO9n7vvH1FGUZFm1tHhUb0q6tvLEyYT73/jtJZ2qSRpv4b7y7q1bO1hkXycNt/ibbXFU54nsYenzajrGFFy6csy/Pt/vV02m27QwpNsUs38X92su1tUj2wpIv8Ad8xvlWtnTfkXY7/xfNtrzMRKUtj2sPTtD3jf0ffeTRpC7blX/gK12uk3Dqrwv+7Rvm8z/ZrjNHj8pjcv8is+1Nr/AHq6XSrh2aJNi5b5WXf8qrXk1pc0j0MPH3dTuPD+oGNkd412qnySfxV2+i6l5LJvlVopPm8z7rV5npvnW7LM7sqb/wCH7q11mk6o7SDZ8qL/AHk3bq8+VP3uU9WnU5oHpFjqFtIrP1SN/mk+781OuLx7iMpD99lVmjkSub0nVEa4/wBGufkX+Fl/hrQbWkuoRDPc52/eaP8Air1cLyR908nGe0KOsN5as8fzyt8rbfvVgTR3NvdSO6Llfm2s/wAv/fNauuXEKRsm/ak33Grm7i4fznhR8L/Fur6DDxjGPMj5XHRkdLZO0vhws7qSYHBK9O4rlNQeHy1+zbm+7v8AmrpdMkYeEPNVcH7LIQD+Nedav4gfT/MmmmVEW33PG3y7a/c/E+dsnyFr/oGj/wCkwPQ4sV8Hgb/8+1+UTI+J3ij+zdNTQoVZp5FZmk/2a8Zjs5ta1x7Z7aN2kf5ZGbayrV/UvGVz4m1S7ufOzE3zW+5/ur/dqxoumx28L39y7O+35G/551+UUY+6fBS+PmiaV00el6fsRPu2+1FVvu153qF9NqV00zyeWsabUZvmrd8SapczXImtpv3XlbW/vVwPjLxFNbw/Y4PkLbmZvvUv8IfDEg8aa88+pBNNmZ45G/f7V+61ch4wuIWmZLN95X5dyptqaG4CwmF9z+Z/t/drDuoprC7aG8m2/eZG3U+VGvumJq+yS3+0pDsm31jCZxJvR/m37q2bhrm6mZ/3bNvrKuoEhbzk/wCBKtHwmkYwN+3WHXNNRJpl3Knz/LXP6lphs3x/dq7o+rJHebPJ+X7u6ta80+G8h3w/NL/GtEthfCcms0ynDpuX+61TwTQ/LvRfl+bbUmp6bNbybmh2lv4aqbnjYj7rKtLlLi+Y0LeRC2/Zj/ZpfLRVV3+9Wesz7Vbdt/2hUv2p41+/u21JPKX1lRYfkeopJ4Wb7nH3qprcbv4G25p3mfMU/wDHq0KLPmJ5n31Vv/Qq3dC1B4WTY+0qtcyq7vnT+GrtrcvHJ/wDa9TzGfunWzao80yeYdqfera0uZJFb5Pu/c3f3a4+G4eTYm/dtrs/D8Pmafv3qZPvfN/dp/4SZDtUt7aS1Kb12f7VeceMPDK6XMt3bPuWT+Fa7LxRq0Ufyw7vlTa9c1Oj6pb+e4bbt20xxlynKUUs0bwzMjpgrSUHSFFFKoy3NKWwDo8fwVIsacv2qFW29qmjhdvv8/3afL9ozGLHuY8fLXuf7LXwQfxtqEfirUrZvsVnKuxWT/WSV518NPh7ceMdWFu7+VbxsrXEzf3f9mvqf4P65Z+D0l8N2yKLaNldVZPmas6kvZnBjK3ucsT6T8M+B9N0nQXcW3nSyRbtu35VWsW48J2GqaeiJprW5+9KsyVf8P8AjKfVvDdvMkzErAq7o2+9838VLdatquqQmF7/AHvu+Xy02t/u158qdOOi2PI5eWJyN94NtmZprBG/i/h+9WXN4fubWT5/MSZk2vt+bbXYw6s9vdPD9jZ1Vfmk/i2/xUNqGmyXzH7G0x3ruaP+7XP9XpSYbHEfPAsqO7Hc2x/M+9Un2tFl8lN27Z95q6S+sdHuL5U2SKGfCKyfMtMutC0pXb99t2/M/wDs1wVsLLnL5eUf8HXup/HdrIV+RVlB/wC/bVr/AByis18Q2l5dTqoWwIw/T7zc0z4avp9v43htYDGkjCQnauDJ8hri/wBsvxJe6b4m07SLVwBNpRc+o/eMM/pX7tlaUPo+4tf9Ra/KkONPmlyniH7RXjhNQ0u5ttKdhCsTbG/i214V4V0vdpaXOyRvnVV+eu8+K0k1v4XuIZgrSySqqNu+7WF4RtdukpC+0D7rfw1+R4GnyxZ6mHjy0hI7JFPkum4/7P8AFT00lJJvnRf+BPWs0KblgHzbaoSW80k29ywNehzS2NY+7rIhuLP7sezlf+BVz/jK2hbSZnSHdtT/AL5rr7PZIp/c43PtrH8eafDHo92+xtixMybaPekX9o8nf7ppaKKZ1BRQrIV96KiMQP0g/Z7/AOUbif8AYl6x/wChXVfm/X6Qfs+cf8E21x/0Jes/+hXVfm8rbq/avFb/AJEuQf8AYLH/ANJgcOE+Op6i0UUV+MHcIfmbfmlDbuaF2c7aRV20viARVw3PpTqKKXwgFKvQ/SkoqQE37mNLRSMu6r+GQC0Ab+1FLyppgCr8xra8DaNNrXiC20yC2aZ2lXbGv8XzVip94V9K/wDBM/4JXPxd/aO0W2dF+zWc/wBovWk+6sa/Nub/AGa48XWjh8PKb6GmHoyr4iMP5j9O/wBkr4V2vwh+AOg+D7Z/Ku5rL7Vfq3/LOSRf7v8Au16ZJYTRtFvdWeP5nk37d1TtY/6Y+91fa+1WVPl2/wCzU50/7Ux3pIrruVm/vf7tfk+JxXtsRKUj9mwuHjh8NGPYwptPudqfaEZf3rb2j/iX+GqFxptzbskdskjf34d/zf71dra6enmGZIV/3W+61V9W8PvI2/ZM3mRN8y/wqv8ADurnVb3kE8PS5eZnE/Z3hk2dW3/O3+zUkk025Sibm/jaRflkro4fDcPkh3h8ot/e/iWs28sfLXyU+8sW7d/Eta0anN7xy+x5o80jmtUmdeX2q/3lVfmX/drk9WvLP7cIQ/kzSbldfu11niJYbhvvsj7dybk+b5a4XxNdQzaeZHjUFX+ZtnzN/tV7uWytK72PCzDD+7oZeoX6XCv9jdl8t9vmLWRdXVzMzO9yxMb7k+fbU91ePj7mFVNqqv8Ae/vVzepas8MzTecu5l2Ov8K19Lh6nQ+NxlPlkWNUmh8tn+b5U3Osf3t396ub1a5xb+dvYlt3zN/Ey1JqXiBJo3tkRS0ifejasC+1yGRt6bmk2/xP8terT5pcp5FTkJr7VHmjjmh2tti+9/Etej+GcN8L1/e7wbCb589fv140upQyfcdt3+y/y1654PlVfg0JnyoGnXJOeoGZK/afBtWzjHf9g1T/ANKgfW8Eu+PxD/6dS/OJ5nb3PmbPs025ZpW+X+7XLfFnVJofDNz9jfbui2/7taUN4beM/eUtu2bf/Qq8++KXiqG3aTTZtrvMm7y2/wB2vxrllzHx8ZSkfKPjpXk1y4uX++0rfM1UNGvPs0zF/utWp423yaxK7/cZ91c+spinVk+YK+6uiMfd5TSJ0/kyRq7+Tjd/erKvpHjwj7sf7NaEN4l1Ypvm+9/drMvPm3OjsW/u1X90jl98pyNlvdqjkx/B92pJJHZgmxai2nd8lSaRBt7SeY74NWLXUJoW3+c23+7UTQzMN/3qU27r8nf/AGqr/EBuWHih0Ub03D/arb0/xG8jNCm1d1cRHG7fJsartr5sbLNsb/dpc3KTI7LzPtDb9iq33dtT2VruzNlX/wBmsfR7xPIX52P+9W3p94gbyUT738S1rzc0TE0/Dun/AG64+zbNnzqq7v7tdf8AED+0o9JttEtrWQJDFulb/wBBrm/Cd3DHqUKXO1Pm2uzf71eqXzaa2jtqqQ/bC0Sqys9PmI5o854Rr032e1l+TCbPmXbXnEzFpi+zG6vc/H8fhvVrVLaGwktpGXd5f3q8e8ReH5tKuN6Qt5TfNUfD8RtTlcyqVWfdspKdCqCRd+6g6TX8O2vmP8g5/iq14wmEccNmlzuRfm21P4YtkjUzO642bvu1h65fPeX7vvVlZ/vLS+2Y8vNMpk+Y1aOnzTx252P81Z8Y/eYetnSVhWNhs/4E1QEi9pd472phd97tTdSmubfds+cVFbqnmHyX+Zal1L99OIUdt+z/AIDQR8PvIr6fq1zcN5P3f4fmq/dXiW8bPs2/w7lqO3sYbWMyVHfMkkJhfk/e+WtBc3vjrfUt0iu8y4b+GtixTdDLNC7FFrnbfT3umXCfdrqtBmezt3R0UIyfMq0B8RmyX32X3VvvV96/Gtt/7AxdCBnwhpZH/kvXwpqljbM29I2279v3a+7PjXb7v2CDbK2P+KS0pQfxt6/X/DHXKc7/AOwaX/pMz7LhR3weP/69P8pHwGusJ5nlu+dv96tGHe8P2npu+5WZb6SjNs+Ulfv/AN2tGO4e2jCPtx93bX5DKMYyufG/ZJbfevM0O8f3qkkWFmR3TBk+Wq011OJN6Ju3f3f4aiWaaS4SF0YBv4qQSjyli4t/9tg23/vmq8av5e/zmI/jp/2h1uPv/dfbTG+VVTfuT+81L3ugvd5hJGfOx5lP/stZ2qKqyfc3bf4lrRkt0uN2zctMbQ55ov4f71EolnNzWbtJ8nA/vVCbGZ12bN3y/wANdP8A8I/5Kqj/APA6kbwn5S74X4b7v+zTjEz5uU5C006a4uvISNifate80+bT1jieHYy/f3Vu/D/Rba68eQ2Tur/Oqv8A3a9C/ah1rwR4i1fw94a8B+A4dGHh/S2ttW1D7b5rapcM27zP9lVX7q1nKITqX5TA8G2v/EjV/vf31/urWnazzaTcLqtm+2aP/VN/dqv4NV5ND2bMbX2tuq9cRyRtKfJ+X7u5a3p7GNSMZaH2D+xb+3NqVjJZ+D/G2vNaTQp/oGpebtbd/Cq12/8AwVO0HVfjj8O2+MupaU02o6TErPNbxf66Pb95mr4A0+6vNJukubZ2/c/Mu371fUfwN/bAfxF8M9S+Dnj+/jZ7rTWt4rq63bWX/a/2q1jWnS0+ycFXDxn7/U+R/L8ldnzff/iSvq7/AIJzNnRvFKkYIns8/wDfM1fMOs6b9h1i5tra5V0hnZFZX3Ky7q+n/wDgnTn+yvFmQB/pNn0/3Zq/RvCb/kvML6VP/Tcz7bgdy/1ho3/vf+kSPG/jkUT42+KlMTBv7duWV/X94a5qO385ld41zv3bv71dL8dlQ/GfxSWbaf7eufm9P3hrnY1/eNs+6v8Adevjs8/5HeK/6+T/APSmfO5jJf2hW/xy/NiBXW4EMnyt/dX5ql2pI3k7GLbfu79u2ntC7R74H27fu0ohLQ7P3j7fvfJ8zV4/2DkjKW8iNdm5k37fm+9UCypCVRPm+fazbNy1buFQ7odm1tm5Vaq7RC3dnfzAI/4mquZBH4rC+Z5f+kiH5lptoySKuz+9/FUUzbf3Xk//ABNSbdtwyJJt3JtrGR3x2LMNw/2dkeDf821G3/dqeOaHaPn+X+CqTFNqu7t8y7akVkaFpEdW/uVly/aOqPOaX2tI4fJ6bl/herNjL5kaTP8AN8rbt1ZUf+qTfyV+bdVyN/JZXR2X5Nv+zS5UKUpGtbSecud/3f4f71WLdtyvNMija/y7X3Vm2s27Y7/LuT5NtXbObazO5VGb5mVnreJx1uXoaFjMVVdj7n2bVjX5aZcrBsKOjMZPlpkbAyIkKYXZu3Sfw0jMis2987fl8tfu/wC9V/4Tg92XunGX1r5LtM+7bu/v1LYrvj87yVbd9z/aWrGqRp882/I2fdp1vHtVY1Tjb8jKlR7GfKe3Rlyk9rbpM2Xh/h/75rVtWeFl/fbl/u1ShjeO3/cup/2a0bVfm2eTtG2vPrUZRPawtT/wIu2Me5Vab/lp/Ey/MtaOm3HnS7PJj+X7q/d3L/8AFVm29ykbF96/991dtZEutjwpsMnzfc+XdXj4inL7J7NOtKUuVyOg02R45g+xSzP/ABfwrXRabfJHCiI+1tm7d/8AFVyVi32eOKa5Crt3KzK33mrXjvNuJpLnai/NuVP9mvJqe9I9Gm4xOxtbra2938zcyq67/wCGug0vUPs00XnQ7k3bn3VxOl655bLv/wBIWRP3rK+1l+X5Vrd0nUplji2PDjeq7ZG+7XLKPKd8akTvtJ1GG3YvN0/ur/tVpLq1hG0iJtfy4vnk3bf4ttcTp+uOZGdEVjGjNt3/ADNWjJqkMLI7p/rE3fe+Wrw/PGRjiJQkaeuXEP2hEuZtiNKyfN93/erntQ1K2hm8mN8Ov8Wz5WqXWL+Z42hfaRvVkZvm/wDHqwdUvEW382ZtzKny7vvV7uFre57x8xi6fNJyPSdHS4vvAnlWjhpZbSVYiG/iO4Dn615V4p+E3xVutFns9F0dTLcjbMXvIhuHrktVnwz8UfEPhG1XSozHdCeTdELndtiz1AwRgd8Vz/iH9srxRp2uTadpmhaVJDDN5bSSCTJx94jD8iv6Mnn/AIZ8WZNl9PNqtenVw9KNO0EraJJu/LK9+W620eup62MxvDWY4SgsbOcZU4qPur08n2OftP2YvjQlwh/sC3jVW6m/iPHpw1dHqfwG+J4tvI07w/Gw27SrXsQ4/wC+qvWX7VPjCWyS6utA0zdIcqsaScD8XqjqX7YPi+0lkih8O6XlO8iyf/F1z/UfBiMr/WsT9y/+VnlQocD30rVfw/8AkTlLz9mH44OS0XhuMgggKmpQjb+b9K5PWP2Nv2h7243x+DoWG/duOrW4/wDZ66rVv2//AIj6fN5UPg/Q5CPvLtmyP/IlYdx/wUp+J0RITwR4f47Ms/8A8cpfUfBff61ifuX/AMrGqPA3/P2r9y/+ROef9iP9pBFaRPA0DMynC/2xbfL/AOP1jX37Bf7UupzNLP4KtVI+4TrNsf8A2euwX/gpn8WiQT4E8OYPQ7Lj/wCO0y6/4KefFS3GR4F8On5f7k/3v+/lV9T8GJe99axP3L/5WEcNwN0q1fw/+ROGb9gD9qcWjQjwBaFy2Q39tWv/AMcqhP8A8E8P2ry+6P4f2h/7jlr/APHK78f8FQ/jGyGT/hAPDIA6gpcZP/kWqkv/AAVV+MiqHT4eeGcHqClxkf8AkWo+oeC//QVifuX/AMrNPYcEW/i1fu/+1OKj/wCCdv7WET7ovAVoM/8AUbtfl/8AIlbuhfsHftRwZGoeA7RQRgkazbE/pJWmf+CrnxnySvw88LlR32XP/wAdqWD/AIKpfGl0WWb4deGVRjgER3H/AMdp/UfBeOv1rE/cv/lZLocDf8/av3f/AGpR1X9gH9oS6QmHwbakj7v/ABNLcZ/8frmr/wD4JzftTOxMPge0ceg1q2H83r1jwb/wUs8f+IZxbaj4O0GFs4IQTc/nJXW6l+2t8Tre386x8MaDJu+6WSbA+v7yksD4LS0WKxP3L/5WQqPA1P3vbVfuX/yJ85r/AME6f2smTa3gG0GemdctTt/8iUi/8E5f2slBA8CWgz6a5a//AByvVPEP/BSP446KzLH8PvDL7Wxylx/8drAk/wCCrnxpiQs/w78Lgjtsuf8A47Q8v8F4/wDMVifuX/ys0jS4HltVq/d/9qcYn/BOj9q8gq/gG2A3ZGNctf8A45SJ/wAE6f2s1BUeAbTP95tctf8A45XZD/grD8Zud3w58MDH+xcf/HaVv+Cr/wAZVfb/AMK88L/98XP/AMdo+o+C9v8AesT9y/8AlZXsOCf+ftX7l/8AInIJ/wAE7v2shFg+A7UMPu41u1/+OVLD/wAE8v2r1H7zwHabv7w1u1/+OV1p/wCCrXxmwGHw98L4P+xc/wDx2g/8FW/jKOB8PPDBPpsuP/jtH9n+C/8A0FYn7l/8rEqHBEdqtX7l/wDInP2f7AH7VEGC/gW1POcf21a//HK6HT/2JP2l4bcRT+B7ZMDGI9Zt/wD4uprT/gqh8Y7ghH+HfhoMfRLj/wCO1dP/AAVD+KkcZkn8DeGxt64W45/8i01gfBf/AKCsT9y/+Vk+w4H/AOftX7l/8icxqf7Bv7UF1K0ieBrZjuyrDWbYf+1Kji/YE/acEarJ4HthtGcLrNt97/vuunt/+CoPxjuX/d/D/wANY7jZcZ/9G1dP/BTL4rKGZ/BHhtQq5O5Ljn2/1vWj6j4L2/3rE/cv/lZLocC/8/av3L/5E8w1T/gnV+1bcXHnQeArQ7upGt2o/nJVX/h3J+1r/wBE+tP/AAeWv/xyvSj/AMFRvjC0vlxfDzw37FluMf8Ao2lvf+CoHxnjtzPZfD/wyxX7yOlxn/0bS+p+C8v+YrE/cv8A5Waxo8E/8/av3f8A2p5r/wAO4/2tP+hAtP8AweWv/wAco/4dx/taf9CBaf8Ag8tf/jldr/w9j+NP/ROfC/8A3xc//HaP+Hsfxp/6Jz4X/wC+Ln/47VfUfBj/AKCsT9y/+Vl+w4K/5+1fuX/yJxcf/BOb9rQct8PrP/weWv8A8cq7pn/BOb9qKS7jXUPBNtFGWXfINatjt/APXoHhL/gpj8evF+qx6Rpvw28MvI/UrHcYH/kWvXtG/av+ItzGBqfh3RVkC/P5SSgE+gy5rKdDwUpL3sXifuX/AMrOar/qJD3ZVqv3f/ann/hf9jP4teGNJj0y08K2o2jMji/h+Zv++q11/Zg+M0Uonh8NQqw6bdQhx/6FXZN+1Z4xTIbQdK3B9pBEn/xdMm/au8dJsRfDOlbmGcEydP8Avqud4bwQlvi8T9y/+VnO6PAL3rVfuX/yJ1nw18AeONC0RtM1/SFVpBkk3EbAH8GroYvBuqrIZ2i+cH5DuXgfnXMfCv47+KPHN3NbapoVqoiAO+zjfHP+8xrsZfGOpqp2WkJbOVVsjK/3utS8B4HdcXifuX/ys5o4bw8V0q1b7l/8gcpqHw18bx3sk2nxKyOrLhJlThvqaSDwL8QbcqsmkrIsabV2XSLn9a27/wCJup2dzHGLCBkkGMhWyD+dE3xN1NWXyLO2fPVBu3fhzWNTKvA7ri8V9y/+VFPCeH0d61b7l/8AIHOyeAfiXI27+yo1bbgMLiPj/wAeqpJ8OvinNGI20CDcFI3tdx//ABVdM/xS12P5ZbSyRiMpuD4P/j1D/Fy5t4Q86WjOekcatz+OamOWeBdv97xX3L/5UDwnh7/z+rfcv/kDO+Gfws8WeHfG0HiTxAwZIg4yJlOMxlegPqa539qj4NfEb4neMdN1PwXo8dxbQab5M8pu442VvMc4w5GeCK7zwf8AEzUfEniaHRrjT4EhmD4eIMWBCFuTnA6VoeP9R+KOnTrH8PfClpqCG33NJd3CpiTJ+XBde2Ofev1nJci4FzXw1r4HLnia2D9veXLByre0Sg7KMab91Llb917vUaoeHqldVqv3L/5A+PviL+xb+0Z4hhtrHSvBkEkUcu+RpdXtwT+b0ul/sU/tFWcYR/CNsNn3R/atv/8AF17rcfED9usayLa2/Z+0A2eObhtXhz+X2rP6VqWvjL9sJ3H2r4M6Ii98alHn/wBKK+fo+HXA8YWjh8x+dCf/AMpOlU+Abfx6n4f/ACJ4Kv7Gn7QDgmTwvbKSMfLqUHyj/vurQ/Y0+NJCRt4TtgqptyNRhz/6FXuq+Lv2tyxDfB/RQAeD/aEfI/8AAipovFf7Ve0mb4S6PnPAW/j6f9/60/4h3wT/ANA+Yf8Agif/AMpE4cAPevV/D/5E+fj+xj8b443SDwpD935M6nB/8XWP4y/Yn/aP1TQJ7TS/B1u08yBdp1e3GM9eS9fTg8VftS7xn4T6Tgrk/wCnx8H0/wBfWV4x8cftoWGkmfwZ8DdEvrzeAIZ9UhVcdzk3K/zo/wCIecE2/wB3zD/wRP8A+UlRhwCmrV6n4f8AyJ8Z/wDDuP8Aa0/6EC0/8Hlr/wDHKP8Ah3H+1p/0IFp/4PLX/wCOV9P/APC0/wDgpZ/0a14X/wDB7b//ACbR/wALT/4KWf8ARrXhf/we2/8A8m0v+Ie8E/8AQPmP/gif/wApOj/jBP8An/U/D/5E+YP+Hcf7Wn/QgWn/AIPLX/45Qf8AgnH+1oeD4AtP/B5a/wDxyvp//haf/BS3/o1rwv8A+D23/wDk2j/haf8AwUs/6Na8L/8Ag9t//k2n/wAQ94J/6B8x/wDBE/8A5SH/ABgn/P8Aqfh/8idj8HvhP448JfsVr8G9d0yOLxAPDOpWZtFuUZfOlM/lrvBK8715zgZ5r4tb/gnF+1qeR8P7T/weWv8A8cr72tvHXxI8Pfs66h8Tfil4TtNK8S6VoF9f3+kwTCWGN4FldF3JI+4MqIThyfmPQ8D5A/4ex/Gn/onPhf8A74uf/jtfQcf4DgOGEy2hndStT5KKjTUVaXIlFfvE4NqWiurKzvoZYahwLeTp1qr112/+ROK/4dx/taf9E/tP/B5a/wDxyk/4dyfta/8ARPrT/wAHlr/8crtv+Hsfxp/6Jz4X/wC+Ln/47R/w9j+NP/ROvC//AHxc/wDx2vzf6j4Lv/mKxP3L/wCVnV7Dgr/n7U/r/t04r/h3H+1p/wBCBaf+Dy1/+OU3/h3D+1r1PgC0P/cdtf8A45Xb/wDD2P40/wDROfC//fFz/wDHaP8Ah7H8af8AonPhf/vi5/8AjtV9R8GP+grE/cv/AJWHsOCv+ftX7l/8icV/w7j/AGtP+hAtP/B5a/8Axyj/AIdx/taf9CBaf+Dy1/8Ajldr/wAPY/jT/wBE58L/APfFz/8AHaP+Hsfxp/6Jz4X/AO+Ln/47S+peC/8A0FYn7l/8rD2HBX/P2r9y/wDkTiv+Hcf7Wn/QgWn/AIPLX/45R/w7j/a0/wChAtP/AAeWv/xyu0b/AIKyfGkDP/CufC//AHxc/wDx2hv+CsnxpAz/AMK58L/98XP/AMdp/UfBj/oKxP3L/wCVh7Dgr/n7V+5f/InF/wDDuP8Aa0/6EC0/8Hlr/wDHKP8Ah3H+1p/0IFp/4PLX/wCOV2v/AA9j+NP/AETnwv8A98XP/wAdo/4ex/Gn/onPhf8A74uf/jtH1HwY/wCgrE/cv/lYew4K/wCftX7l/wDInE/8O4v2tN27/hAbT/weWv8A8cpf+Hcf7Wn/AEIFp/4PLX/45XpGjf8ABUn4u63GbWDwJ4ZS8P8AqY3S42yH0B83rVC4/wCCrHxvtpmt5vhv4XR0bayslz/8dpfU/Bf/AKCsT9y/+Vi9hwX/AM/av4f/ACJw8f8AwTj/AGsiw8z4f2gHf/ieWv8A8cr7Z/4JvfAy8/Zo0HV9Y+JNvb2mr6gUt47aPbMRCRl2Lx5GcgcV87+Af+Clnx48eeI7bw7p3wz8OSS3MojRYorjJY9uZa+9/D/hS3v7Czk1K6cTyWiNeCIbVjlK7iozk4rxc6oeBEKPssVjMUk+yV//AE0z18nwHC9XEe0w85trvt/6Sj0TTPi74GtExLfyE55PkPkj8q1bP41/DJZWF1qjsrY+ZrSTt9Fri9I+EmgX8ImuNRvFHcIU5/8AHa6LTP2dfCN64WXWdSXK5XDxjn/vmvjHlv0a5R1x2N+5f/KT7hUsO4rc6OL46fCKJ939uyHnAP2GXgf981ZuPj58GpQXj12QF2GV/s+XgHr/AA1n237JPgqeHzz4i1XA7Bosn/xyrUf7H3gGRjjxRqxA7AxZH/jlZrL/AKNMf+Y7G/cv/lJoqNGPulS++NvwqeV2t9dkI2lVb7DJu29v4awdU+KvgK7RWg1hg38ebST5v/Ha6GX9kTwaCUh1/VmY/c5ix+PyVzOofs9+GLOZoF8QXuVJG5gmAR2Py9a2p5b9G37OOxv3L/5SRUpUOXW5zOr+KvC95OXTUJHGSQTAw/pXH6syXzq8NxsVRt2qnOM5rrNd+HWj6ZOI7bUpnUHErMV+X9K5q+0tbZ3FuzPtkKYbg5FejQy76O9PWONxnzS/+UnlVsLlc7qTl/XyOQ1XRNbmDC3t1kOc7vMALt/eOaxNT8GeMLmdwLZGiKfuhFIibW9+ea6XVvEOoabIyJaI+DgYycn0+tcnqfxi16wLL/ZVrlBkhg33f++q97DYDwHfvQxeK+aX/wAqPm8VhuGHJqpOfy//AGTL1X4Z+PrjIs9LQEr95rpMZ9etY0/wY+J1w29tMiVmfc7LdRnH+7k1b1D9pjxJaMUTSNNBVcvv8zj/AMerPH7Vvi3d5baBpeexUSEf+hV7NLL/AAV5fdxWJ+5f/Kzx6tDgm3vVav3L/wCRF/4Ut8TyVjXRYlj/AIl+2R5/PdXqPhjw5q9h8MB4ZvoFS8+wzxGPzAwDMXxyOO4rzSD9qHxbI6o3h/TTnrt8z/4qrtv+0j4klG+TQ7HGcYUSE5/76r6fhrOPCfhnFVa2ExFZupB03zRuuVtN2tBa6Lv6HTleO4MyitOpRq1G5RcXzK+jt2itdChdfAv4iGPFpYwLuXDBrpcr+Oa808dfsl/HzxH4lS+stDsjbxwldzahGCT9M16v4g/aa8RaLa/aV8NWLARlizyuAMV45bf8FNPHl74kvNHtfhzoxhtmISVriXLY9ea+fjl/gnusViPu/wDuZxww3AnLpVqfd/8Aannmv/8ABPD9p+/unktfDmnMrNkZ1iIf1rHb/gmv+1WTn/hF9M/8HUP+Nehar/wVU+JdhI8cfwy0FinUNPMP/Zqpf8PaPigeR8K9A/8AAif/AOKq/qPgp/0FYj7n/wDKzWGG4H6Van9f9unO6J/wTr/agtYXiu/DGmKD0H9sRH+tR3H/AATo/amlfJ8N6a3zZ3DWYR/Wu60n/gqT8TNRT5/hloSv6Ceb/Gi//wCCpHxNsjtHwy0Nj6edP/8AFVH1PwT/AOgrEfc//lZDocDc2tWp93/2p52P+CbX7U3O/wAL6Yc/9RqH/GlH/BNz9qf/AKFXSh9NZh/xru1/4KqfE9ip/wCFZeH8H7x+0T8f+PVKn/BU34myjKfDPQfu5/183/xVH1HwT/6CsR9z/wDlZXseBv8An7U+7/7U4P8A4dwftR5x/wAItpeP+wzF/jUh/wCCb/7TZw58N6duH/UZi/xrtx/wVO+JaDfP8NNAVT91/tE2D+tRt/wVX+JQGV+GGhdcczzf40/7P8FP+grEfd/9zF7HgaP/AC9qfd/9qceP+CcX7TOf+Ra00D21iL/GlT/gnV+1FGqxDwzppVf+ozD/AI11b/8ABV74lBii/DHQQf8Aanm/+KpU/wCCrXxPZtrfC7QR/wBt5/8A4qmsD4Kf9BWI+5//ACsaocD9KtT7v/tTnIP+Ce37TsChV8Madgdv7Yh/xrQtv2B/2loAWHhnTQx6/wDE2i/xrXX/AIKr/Ekjc3wx0PHtPN/8VV7Tv+CoHxGu5Ak/wy0ZQ33Cs03zfrT+o+Cn/QViPuf/AMrJ+r8Df8/an3f/AGpT0/8AYZ+P0TB5/DlgrbcM39qRn+tdT4a/Ze/aH0mOS3u9As3jP3VGqR4P61d8O/t/+O9bIWTwJpCE9Assv+Ndhp37VPxC1BFmPhPSYomztlkkk28fjSWB8E+mKxH3P/5WZyw/AcdHVqfd/wDamG37KXiy/iB1HwXYCXfw63qDav8Ad4Nc1rv7B/i/V/Nh/si0CSAgH7avFel3H7V2t2G2O80HTncpuYwzOV/nViH9p7xDPp7XqeHLFSMHa0j9D361p9R8F9vrWI+7/wC5h7LgP/n9U+7/AO1Pk/Xv+CaX7SsWpyroeh6bNb7v3UjatEpx7gmoLT/gm5+1OkgE/hbTNobOf7ah/wAa+hPGn7cHxE0ATnR/AmkzCEZ3TSy4I/A159B/wVG+KjTGGb4V6GpHpPN/8VUPL/BTrisR9z/+VmkafAvL/Gqfd/8AanNr/wAE/P2l7fT3hh8NaY0hTaudWi/xrnp/+Cbn7VLS+ZH4V0zHp/bUP+NelXf/AAVI+IUFwbdPhvoeV++Wnm4/WoJP+CpfxQCmSL4Y6CVHVjPN/wDFUfUfBT/oKxH3P/5WP2PAv/P2p93/ANqeeL/wTY/ao3iQ+GNMyGz/AMhqH/GtCL/gnX+0+iHd4X03J7LrMX+NdY//AAVV+KkbfP8AC7QMeouJ/wD4qr0P/BUP4lSQea3wz0IfS5m/xpPA+CnXFYj7n/8AKwdHgbrVqfd/9qcAf+CdX7U4kJHhjTto+7/xOof8asRf8E8v2pduZfDWmA/9hiL/ABrtl/4KifEpsEfDLRBnsZ5v8aQ/8FQ/iiEDn4YaFjGT+/m4/Wn9R8FI/wDMViPuf/ysPY8DSf8AFqfd/wDanJQf8E9/2mo1O/w3p59F/teH/Gqk3/BPD9qWWUlfDGmKD1xrMP8AjXbD/gqP8Tdm9vhjoQ9B9om5/WlP/BUn4mbcj4XaHk/d/wBIm+b9aj6j4J/9BWI+5/8AysPq/A0f+XtT7v8A7U5PTv8Agnv+03asHfw1p2QMc6vEf61r2/7Bf7Q4t2iuPDlhknII1WL/ABrYtf8AgqD8T7iLzT8MNDX2M83+NWB/wU88fjHm/DjRhn0mm/xo+o+Cf/QViPuf/wArF9X4G/5+1Pu/+1Obuf2CP2jnO+PQLHOM4GrRfe/OvqL4nfDLxh4k/ZSb4WaVp6Ta1/YFja/Z/tCqpliMO8b2IXA2NznnFfP3/Dz/AOIJGV+HOife/wCe83T161E//BTn4rTz7bX4daBGgHJladifycV9FkuceEvDuGxVLC4ms1iIOnK8W3Zpr3fcVnq97+h6OAxnB+W0qsKVWbVSPK7ro77e6tdTlk/YP/acjYlfBVr0x/yF7b/4ukf9g/8Aab2/L4EtCf8AsMW3/wAXXYJ/wUr+LAjDT+AvDwJ9Fn6f9/Ken/BSj4rlA58A6Bg8nCz8D1/1lfOfUfBn/oKxP3L/AOVnlfVuB/8An7V/D/5E4qP9gv8AadVh/wAUVajHrrFt/wDF0+T9gv8AaXaZXHgq2wv/AFGLb/4uu1/4eS/FLdtHgjw8SBlsJPx/5Epo/wCClHxRMXmHwR4eHttn/wDjlT9R8F/+grE/cv8A5WDo8DL/AJe1fuX/AMicdH+wX+0kUKz+B7Y4+7/xOLb/AOLpI/2Cv2lUO4eDbUD+6dXt/wD4uuxH/BSb4stEZh4D8PADswnyf/IlKv8AwUi+Lhj81vA/hwBl3KAlx/8AHKSwPgt0xWJ+5f8Aysf1fgjl/i1fuX/yJyqfsJftGiPL+CLVn/7C1v8A/F0L+w3+0qpYnwJbEEYx/bFt/wDF11K/8FJviyzbT4F8PAj7wKT/APxyh/8AgpL8WowrnwL4eKlsfLHcf/Haby/wY+J4rE/cv/lYex4Ij/y9q/cv/kTlh+w5+0vIY9/gG0XH3ydYtj/7PWh/wxF+0N9mMf8Awhlru9f7Vt//AIutpP8AgpN8VS7B/A/h0DOFG2fJ/wDIlXV/4KJfFA2T3h8G+HhsjLY2z9v+2lNYPwYlLTFYn7l/8rJlh+ButWr9y/8AkTh/A37CH7R2k+I7jVNW8GW0SnPkumr25z+T1qax+w78fLstLF4Rt5ZC+4FtUgH/ALPXQeA/+Ci3xV8V209ze+CPD0YjbagiE/Pp1kNa2oft8/Eq1hD2/gvQ3IOHY+dgf+P1DwPgv/0FYn7l/wDKwlhuBuZXq1fuX/yJyvh/9jP9oCxsXt7rwhboWkzj+1IDn8nqxP8AsdfHtovLj8J25P8AeOpwf/F10+nft5fEW8gSWXwnoa7unyzcj/v5Sz/t3/EqJiB4O0TAGcFZs/8AoyrjgfBi3+9Yn7l/8rM5YfgWUuZ1qv3L/wCROPk/Yx+Pi/6vwhA3GOdUg/8Ai6gP7GP7RSsWi8IW6jbjaNXg/wDi660ft+fE8u0f/CH6BlRlhib/AOOVH/w8D+J+WU+DNBBHTib/AOOVp9S8GtvrOJ+5f/KzH6rwDzfxqv3L/wCROUH7Ff7QxVI38HW+M5b/AImtv/8AF17z+x18G/Hvwg07XrTxzpUdqb2a3a18u4jk3BRIGzsJx94da8zX/goF8TGQk+DNCDDsVm/+OVDe/t/fE+6spbW38LaPBLLEypLHFKWjJGNwzJjI6816+QZl4TcNZpDMcJiK8qkOaylG6d4uL2guj01Wp6WW4ngrJsXHE0atRyjeya01TX8q79zg/jjIg+NvipHG7/ieXPHp+8Nc9b/vG6qn99tn3qq3WqX+qajNqmoX73F1dStJLPMS0kjk5LMTySTzmpbeTy1/fPvVf4tlfjGOxMcbj6uItZTlKSXa7b/U/PcVWWIxM5r7Tb+93Lp+zLgumz5Pvb6W6VPLEyf3P4XqD7QjNveFWRvl3MlRXVw7Rs6Pg/7P3dtcXvfaM/djSJbi73SfIkY/hRv4ttQXEaQ4HzbG/vNSec7M8Lop+T5G/vVHJNMsafI2F/hZaUpS+FBTp83vC/aEnymxTt+Z1amfaEjZv3O7+61OuJIYo1R0Xc3zVXa42/PMm5vvIq/xVjLY76dvtEse+SQzJ8n/AEzZvvVOvkNDs/h/2ap/aIZF3v8AeqZZkbaiD51/8dqDcvQt9nXeNqr/ABrvq5bzSRyb3TerfLtas6FvtDbLqFfm/iq/FJsk+zTbWVvuVO0+YUv7pdguizG2+zK4Xa27f/FWhbSJHMCiMrN/Cq/NurNh7b/lbd93ZVyO481vvsn8Tt1rWMebc4K0pRloaq3CeSqeTlf4l/ipitP+72TbG/g+Xa23/aqKznk3Nvfeuzcn+zTmuIfOSaZNzr8r7XrXl5fhOTm94//Z\n",
- "text/plain": [
- " "
+ " \n",
+ "
"
+ " \n",
+ " "
]
},
{
@@ -651,8 +495,8 @@
"id": "0eq1SMWl6Sfn"
},
"source": [
- "# 2. Test\n",
- "Test a model on [COCO](https://cocodataset.org/#home) val or test-dev dataset to evaluate trained accuracy. Models are downloaded automatically from the [latest YOLOv5 release](https://github.com/ultralytics/yolov5/releases). To show results by class use the `--verbose` flag. Note that `pycocotools` metrics may be 1-2% better than the equivalent repo metrics, as is visible below, due to slight differences in mAP computation."
+ "# 2. Validate\n",
+ "Validate a model's accuracy on [COCO](https://cocodataset.org/#home) val or test-dev datasets. Models are downloaded automatically from the [latest YOLOv5 release](https://github.com/ultralytics/yolov5/releases). To show results by class use the `--verbose` flag. Note that `pycocotools` metrics may be ~1% better than the equivalent repo metrics, as is visible below, due to slight differences in mAP computation."
]
},
{
@@ -661,7 +505,7 @@
"id": "eyTZYGgRjnMc"
},
"source": [
- "### 2.1 COCO val2017\n",
+ "## COCO val2017\n",
"Download [COCO val 2017](https://github.com/ultralytics/yolov5/blob/74b34872fdf41941cddcf243951cdb090fbac17b/data/coco.yaml#L14) dataset (1GB - 5000 images), and test model accuracy."
]
},
@@ -669,51 +513,47 @@
"cell_type": "code",
"metadata": {
"id": "WQPtK1QYVaD_",
- "outputId": "12268ac4-b9eb-44de-b3a7-2bd3e2fea46f",
"colab": {
"base_uri": "https://localhost:8080/",
- "height": 66,
+ "height": 48,
"referenced_widgets": [
- "9cb5be61e41144ef9dbc9339c2f46eb1",
- "a6ba87512fd04622b9948571d330d9c0",
- "ed1a514c303b49c0a23745f4ff17344b",
- "79edc4bba71748338f58660262c569a9",
- "cbbf6780f4f048feb2644ed4e3fed9c7",
- "e40fc489500f4e4891025c59b2b1fa8d",
- "191c687c120f4aab9a112697124fe444",
- "6b21efad6db4407eb253f819f279671a"
+ "484511f272e64eab8b42e68dac5f7a66",
+ "78cceec059784f2bb36988d3336e4d56",
+ "ab93d8b65c134605934ff9ec5efb1bb6",
+ "30df865ded4c434191bce772c9a82f3a",
+ "20cdc61eb3404f42a12b37901b0d85fb",
+ "2d7239993a9645b09b221405ac682743",
+ "17b5a87f92104ec7ab96bf507637d0d2",
+ "2358bfb2270247359e94b066b3cc3d1f",
+ "3e984405db654b0b83b88b2db08baffd",
+ "654d8a19b9f949c6bbdaf8b0875c931e",
+ "896030c5d13b415aaa05032818d81a6e"
]
- }
+ },
+ "outputId": "7e6f5c96-c819-43e1-cd03-d3b9878cf8de"
},
"source": [
"# Download COCO val2017\n",
"torch.hub.download_url_to_file('https://github.com/ultralytics/yolov5/releases/download/v1.0/coco2017val.zip', 'tmp.zip')\n",
- "!unzip -q tmp.zip -d ../ && rm tmp.zip"
+ "!unzip -q tmp.zip -d ../datasets && rm tmp.zip"
],
- "execution_count": 16,
+ "execution_count": null,
"outputs": [
{
"output_type": "display_data",
"data": {
"application/vnd.jupyter.widget-view+json": {
- "model_id": "9cb5be61e41144ef9dbc9339c2f46eb1",
+ "model_id": "484511f272e64eab8b42e68dac5f7a66",
"version_minor": 0,
"version_major": 2
},
"text/plain": [
- "HBox(children=(FloatProgress(value=0.0, max=819257867.0), HTML(value='')))"
+ " 0%| | 0.00/780M [00:00"
+ "
"
]
},
{
@@ -651,8 +495,8 @@
"id": "0eq1SMWl6Sfn"
},
"source": [
- "# 2. Test\n",
- "Test a model on [COCO](https://cocodataset.org/#home) val or test-dev dataset to evaluate trained accuracy. Models are downloaded automatically from the [latest YOLOv5 release](https://github.com/ultralytics/yolov5/releases). To show results by class use the `--verbose` flag. Note that `pycocotools` metrics may be 1-2% better than the equivalent repo metrics, as is visible below, due to slight differences in mAP computation."
+ "# 2. Validate\n",
+ "Validate a model's accuracy on [COCO](https://cocodataset.org/#home) val or test-dev datasets. Models are downloaded automatically from the [latest YOLOv5 release](https://github.com/ultralytics/yolov5/releases). To show results by class use the `--verbose` flag. Note that `pycocotools` metrics may be ~1% better than the equivalent repo metrics, as is visible below, due to slight differences in mAP computation."
]
},
{
@@ -661,7 +505,7 @@
"id": "eyTZYGgRjnMc"
},
"source": [
- "### 2.1 COCO val2017\n",
+ "## COCO val2017\n",
"Download [COCO val 2017](https://github.com/ultralytics/yolov5/blob/74b34872fdf41941cddcf243951cdb090fbac17b/data/coco.yaml#L14) dataset (1GB - 5000 images), and test model accuracy."
]
},
@@ -669,51 +513,47 @@
"cell_type": "code",
"metadata": {
"id": "WQPtK1QYVaD_",
- "outputId": "12268ac4-b9eb-44de-b3a7-2bd3e2fea46f",
"colab": {
"base_uri": "https://localhost:8080/",
- "height": 66,
+ "height": 48,
"referenced_widgets": [
- "9cb5be61e41144ef9dbc9339c2f46eb1",
- "a6ba87512fd04622b9948571d330d9c0",
- "ed1a514c303b49c0a23745f4ff17344b",
- "79edc4bba71748338f58660262c569a9",
- "cbbf6780f4f048feb2644ed4e3fed9c7",
- "e40fc489500f4e4891025c59b2b1fa8d",
- "191c687c120f4aab9a112697124fe444",
- "6b21efad6db4407eb253f819f279671a"
+ "484511f272e64eab8b42e68dac5f7a66",
+ "78cceec059784f2bb36988d3336e4d56",
+ "ab93d8b65c134605934ff9ec5efb1bb6",
+ "30df865ded4c434191bce772c9a82f3a",
+ "20cdc61eb3404f42a12b37901b0d85fb",
+ "2d7239993a9645b09b221405ac682743",
+ "17b5a87f92104ec7ab96bf507637d0d2",
+ "2358bfb2270247359e94b066b3cc3d1f",
+ "3e984405db654b0b83b88b2db08baffd",
+ "654d8a19b9f949c6bbdaf8b0875c931e",
+ "896030c5d13b415aaa05032818d81a6e"
]
- }
+ },
+ "outputId": "7e6f5c96-c819-43e1-cd03-d3b9878cf8de"
},
"source": [
"# Download COCO val2017\n",
"torch.hub.download_url_to_file('https://github.com/ultralytics/yolov5/releases/download/v1.0/coco2017val.zip', 'tmp.zip')\n",
- "!unzip -q tmp.zip -d ../ && rm tmp.zip"
+ "!unzip -q tmp.zip -d ../datasets && rm tmp.zip"
],
- "execution_count": 16,
+ "execution_count": null,
"outputs": [
{
"output_type": "display_data",
"data": {
"application/vnd.jupyter.widget-view+json": {
- "model_id": "9cb5be61e41144ef9dbc9339c2f46eb1",
+ "model_id": "484511f272e64eab8b42e68dac5f7a66",
"version_minor": 0,
"version_major": 2
},
"text/plain": [
- "HBox(children=(FloatProgress(value=0.0, max=819257867.0), HTML(value='')))"
+ " 0%| | 0.00/780M [00:00"
+ " "
]
},
{
@@ -1021,108 +848,146 @@
"id": "-WPvRbS5Swl6"
},
"source": [
- "## 4.2 Local Logging\n",
+ "## Local Logging\n",
+ "\n",
+ "All results are logged by default to `runs/train`, with a new experiment directory created for each new training as `runs/train/exp2`, `runs/train/exp3`, etc. View train and val jpgs to see mosaics, labels, predictions and augmentation effects. Note an Ultralytics **Mosaic Dataloader** is used for training (shown below), which combines 4 images into 1 mosaic during training.\n",
"\n",
- "All results are logged by default to the `runs/exp0` directory, with a new directory created for each new training as `runs/exp1`, `runs/exp2`, etc. View `train_batch*.jpg` to see training images, labels and augmentation effects. A **Mosaic Dataloader** is used for training (shown below), a new concept developed by Ultralytics and first featured in [YOLOv4](https://arxiv.org/abs/2004.10934)."
+ ">
"
]
},
{
@@ -1021,108 +848,146 @@
"id": "-WPvRbS5Swl6"
},
"source": [
- "## 4.2 Local Logging\n",
+ "## Local Logging\n",
+ "\n",
+ "All results are logged by default to `runs/train`, with a new experiment directory created for each new training as `runs/train/exp2`, `runs/train/exp3`, etc. View train and val jpgs to see mosaics, labels, predictions and augmentation effects. Note an Ultralytics **Mosaic Dataloader** is used for training (shown below), which combines 4 images into 1 mosaic during training.\n",
"\n",
- "All results are logged by default to the `runs/exp0` directory, with a new directory created for each new training as `runs/exp1`, `runs/exp2`, etc. View `train_batch*.jpg` to see training images, labels and augmentation effects. A **Mosaic Dataloader** is used for training (shown below), a new concept developed by Ultralytics and first featured in [YOLOv4](https://arxiv.org/abs/2004.10934)."
+ ">  \n",
+ "`train_batch0.jpg` shows train batch 0 mosaics and labels\n",
+ "\n",
+ ">
\n",
+ "`train_batch0.jpg` shows train batch 0 mosaics and labels\n",
+ "\n",
+ ">  \n",
+ "`test_batch0_labels.jpg` shows val batch 0 labels\n",
+ "\n",
+ ">
\n",
+ "`test_batch0_labels.jpg` shows val batch 0 labels\n",
+ "\n",
+ ">  \n",
+ "`test_batch0_pred.jpg` shows val batch 0 _predictions_\n",
+ "\n",
+ "Training results are automatically logged to [Tensorboard](https://www.tensorflow.org/tensorboard) and [CSV](https://github.com/ultralytics/yolov5/pull/4148) as `results.csv`, which is plotted as `results.png` (below) after training completes. You can also plot any `results.csv` file manually:\n",
+ "\n",
+ "```python\n",
+ "from utils.plots import plot_results \n",
+ "plot_results('path/to/results.csv') # plot 'results.csv' as 'results.png'\n",
+ "```\n",
+ "\n",
+ "
\n",
+ "`test_batch0_pred.jpg` shows val batch 0 _predictions_\n",
+ "\n",
+ "Training results are automatically logged to [Tensorboard](https://www.tensorflow.org/tensorboard) and [CSV](https://github.com/ultralytics/yolov5/pull/4148) as `results.csv`, which is plotted as `results.png` (below) after training completes. You can also plot any `results.csv` file manually:\n",
+ "\n",
+ "```python\n",
+ "from utils.plots import plot_results \n",
+ "plot_results('path/to/results.csv') # plot 'results.csv' as 'results.png'\n",
+ "```\n",
+ "\n",
+ " "
]
},
{
- "cell_type": "code",
+ "cell_type": "markdown",
"metadata": {
- "id": "riPdhraOTCO0"
+ "id": "Zelyeqbyt3GD"
},
"source": [
- "Image(filename='runs/exp0/train_batch0.jpg', width=800) # train batch 0 mosaics and labels\n",
- "Image(filename='runs/exp0/test_batch0_gt.jpg', width=800) # test batch 0 ground truth\n",
- "Image(filename='runs/exp0/test_batch0_pred.jpg', width=800) # test batch 0 predictions"
- ],
- "execution_count": null,
- "outputs": []
+ "# Environments\n",
+ "\n",
+ "YOLOv5 may be run in any of the following up-to-date verified environments (with all dependencies including [CUDA](https://developer.nvidia.com/cuda)/[CUDNN](https://developer.nvidia.com/cudnn), [Python](https://www.python.org/) and [PyTorch](https://pytorch.org/) preinstalled):\n",
+ "\n",
+ "- **Google Colab and Kaggle** notebooks with free GPU:
"
]
},
{
- "cell_type": "code",
+ "cell_type": "markdown",
"metadata": {
- "id": "riPdhraOTCO0"
+ "id": "Zelyeqbyt3GD"
},
"source": [
- "Image(filename='runs/exp0/train_batch0.jpg', width=800) # train batch 0 mosaics and labels\n",
- "Image(filename='runs/exp0/test_batch0_gt.jpg', width=800) # test batch 0 ground truth\n",
- "Image(filename='runs/exp0/test_batch0_pred.jpg', width=800) # test batch 0 predictions"
- ],
- "execution_count": null,
- "outputs": []
+ "# Environments\n",
+ "\n",
+ "YOLOv5 may be run in any of the following up-to-date verified environments (with all dependencies including [CUDA](https://developer.nvidia.com/cuda)/[CUDNN](https://developer.nvidia.com/cudnn), [Python](https://www.python.org/) and [PyTorch](https://pytorch.org/) preinstalled):\n",
+ "\n",
+ "- **Google Colab and Kaggle** notebooks with free GPU:  \n",
+ "- **Google Cloud** Deep Learning VM. See [GCP Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/GCP-Quickstart)\n",
+ "- **Amazon** Deep Learning AMI. See [AWS Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/AWS-Quickstart)\n",
+ "- **Docker Image**. See [Docker Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/Docker-Quickstart)
\n",
+ "- **Google Cloud** Deep Learning VM. See [GCP Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/GCP-Quickstart)\n",
+ "- **Amazon** Deep Learning AMI. See [AWS Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/AWS-Quickstart)\n",
+ "- **Docker Image**. See [Docker Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/Docker-Quickstart)  \n"
+ ]
},
{
"cell_type": "markdown",
"metadata": {
- "id": "OYG4WFEnTVrI"
+ "id": "6Qu7Iesl0p54"
},
"source": [
- ">
\n"
+ ]
},
{
"cell_type": "markdown",
"metadata": {
- "id": "OYG4WFEnTVrI"
+ "id": "6Qu7Iesl0p54"
},
"source": [
- ">  \n",
- "`test_batch0_gt.jpg` train batch 0 mosaics and labels\n",
+ "# Status\n",
"\n",
- ">
\n",
- "`test_batch0_gt.jpg` train batch 0 mosaics and labels\n",
+ "# Status\n",
"\n",
- ">  \n",
- "`test_batch0_gt.jpg` shows test batch 0 ground truth\n",
+ "\n",
"\n",
- ">
\n",
- "`test_batch0_gt.jpg` shows test batch 0 ground truth\n",
+ "\n",
"\n",
- ">  \n",
- "`test_batch0_pred.jpg` shows test batch 0 _predictions_\n"
+ "If this badge is green, all [YOLOv5 GitHub Actions](https://github.com/ultralytics/yolov5/actions) Continuous Integration (CI) tests are currently passing. CI tests verify correct operation of YOLOv5 training ([train.py](https://github.com/ultralytics/yolov5/blob/master/train.py)), testing ([val.py](https://github.com/ultralytics/yolov5/blob/master/val.py)), inference ([detect.py](https://github.com/ultralytics/yolov5/blob/master/detect.py)) and export ([export.py](https://github.com/ultralytics/yolov5/blob/master/export.py)) on MacOS, Windows, and Ubuntu every 24 hours and on every commit.\n"
]
},
{
"cell_type": "markdown",
"metadata": {
- "id": "7KN5ghjE6ZWh"
+ "id": "IEijrePND_2I"
},
"source": [
- "Training losses and performance metrics are also logged to Tensorboard and a custom `runs/exp0/results.txt` logfile. `results.txt` is plotted as `results.png` (below) after training completes. Here we show YOLOv5s trained on COCO128 to 300 epochs, starting from scratch (blue), and from pretrained `yolov5s.pt` (orange)."
+ "# Appendix\n",
+ "\n",
+ "Optional extras below. Unit tests validate repo functionality and should be run on any PRs submitted.\n"
]
},
{
"cell_type": "code",
"metadata": {
- "id": "MDznIqPF7nk3"
+ "id": "mcKoSIK2WSzj"
},
"source": [
- "from utils.utils import plot_results \n",
- "plot_results(save_dir='runs/exp0') # plot results.txt as results.png\n",
- "Image(filename='results.png', width=800) "
+ "# Reproduce\n",
+ "for x in 'yolov5s', 'yolov5m', 'yolov5l', 'yolov5x':\n",
+ " !python val.py --weights {x}.pt --data coco.yaml --img 640 --conf 0.25 --iou 0.45 # speed\n",
+ " !python val.py --weights {x}.pt --data coco.yaml --img 640 --conf 0.001 --iou 0.65 # mAP"
],
"execution_count": null,
"outputs": []
},
{
- "cell_type": "markdown",
- "metadata": {
- "id": "lfrEegCSW3fK"
- },
- "source": [
- "
\n",
- "`test_batch0_pred.jpg` shows test batch 0 _predictions_\n"
+ "If this badge is green, all [YOLOv5 GitHub Actions](https://github.com/ultralytics/yolov5/actions) Continuous Integration (CI) tests are currently passing. CI tests verify correct operation of YOLOv5 training ([train.py](https://github.com/ultralytics/yolov5/blob/master/train.py)), testing ([val.py](https://github.com/ultralytics/yolov5/blob/master/val.py)), inference ([detect.py](https://github.com/ultralytics/yolov5/blob/master/detect.py)) and export ([export.py](https://github.com/ultralytics/yolov5/blob/master/export.py)) on MacOS, Windows, and Ubuntu every 24 hours and on every commit.\n"
]
},
{
"cell_type": "markdown",
"metadata": {
- "id": "7KN5ghjE6ZWh"
+ "id": "IEijrePND_2I"
},
"source": [
- "Training losses and performance metrics are also logged to Tensorboard and a custom `runs/exp0/results.txt` logfile. `results.txt` is plotted as `results.png` (below) after training completes. Here we show YOLOv5s trained on COCO128 to 300 epochs, starting from scratch (blue), and from pretrained `yolov5s.pt` (orange)."
+ "# Appendix\n",
+ "\n",
+ "Optional extras below. Unit tests validate repo functionality and should be run on any PRs submitted.\n"
]
},
{
"cell_type": "code",
"metadata": {
- "id": "MDznIqPF7nk3"
+ "id": "mcKoSIK2WSzj"
},
"source": [
- "from utils.utils import plot_results \n",
- "plot_results(save_dir='runs/exp0') # plot results.txt as results.png\n",
- "Image(filename='results.png', width=800) "
+ "# Reproduce\n",
+ "for x in 'yolov5s', 'yolov5m', 'yolov5l', 'yolov5x':\n",
+ " !python val.py --weights {x}.pt --data coco.yaml --img 640 --conf 0.25 --iou 0.45 # speed\n",
+ " !python val.py --weights {x}.pt --data coco.yaml --img 640 --conf 0.001 --iou 0.65 # mAP"
],
"execution_count": null,
"outputs": []
},
{
- "cell_type": "markdown",
- "metadata": {
- "id": "lfrEegCSW3fK"
- },
- "source": [
- " \n"
- ]
- },
- {
- "cell_type": "markdown",
+ "cell_type": "code",
"metadata": {
- "id": "Zelyeqbyt3GD"
+ "id": "GMusP4OAxFu6"
},
"source": [
- "## Environments\n",
+ "# PyTorch Hub\n",
+ "import torch\n",
"\n",
- "YOLOv5 may be run in any of the following up-to-date verified environments (with all dependencies including [CUDA](https://developer.nvidia.com/cuda)/[CUDNN](https://developer.nvidia.com/cudnn), [Python](https://www.python.org/) and [PyTorch](https://pytorch.org/) preinstalled):\n",
+ "# Model\n",
+ "model = torch.hub.load('ultralytics/yolov5', 'yolov5s')\n",
"\n",
- "- **Google Colab Notebook** with free GPU:
\n"
- ]
- },
- {
- "cell_type": "markdown",
+ "cell_type": "code",
"metadata": {
- "id": "Zelyeqbyt3GD"
+ "id": "GMusP4OAxFu6"
},
"source": [
- "## Environments\n",
+ "# PyTorch Hub\n",
+ "import torch\n",
"\n",
- "YOLOv5 may be run in any of the following up-to-date verified environments (with all dependencies including [CUDA](https://developer.nvidia.com/cuda)/[CUDNN](https://developer.nvidia.com/cudnn), [Python](https://www.python.org/) and [PyTorch](https://pytorch.org/) preinstalled):\n",
+ "# Model\n",
+ "model = torch.hub.load('ultralytics/yolov5', 'yolov5s')\n",
"\n",
- "- **Google Colab Notebook** with free GPU:  +
+ 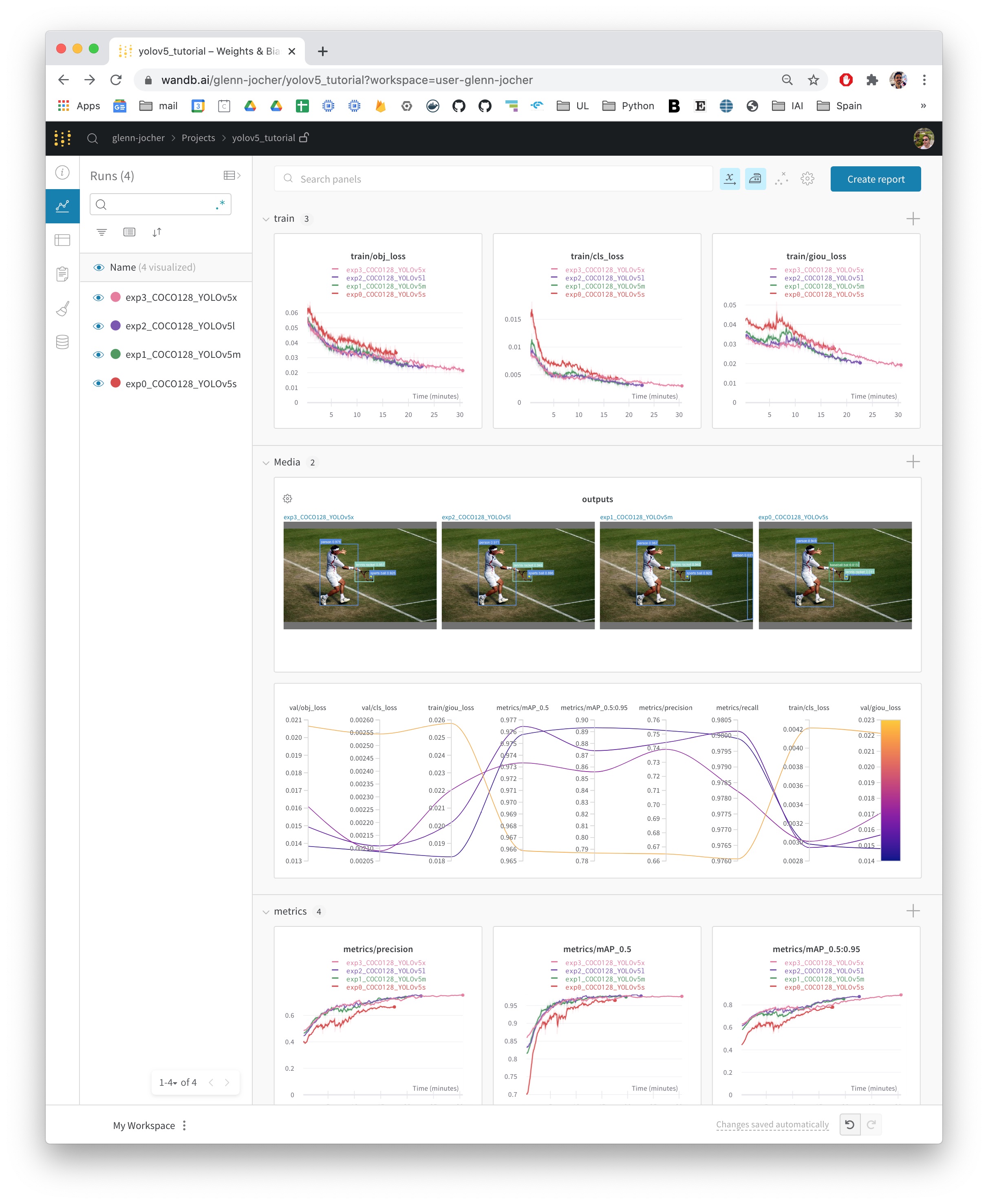 +
+{dataset}_wandb.yaml file which can be used to train from dataset artifact.
+ $ python utils/logger/wandb/log_dataset.py --project ... --name ... --data ..
+
+ 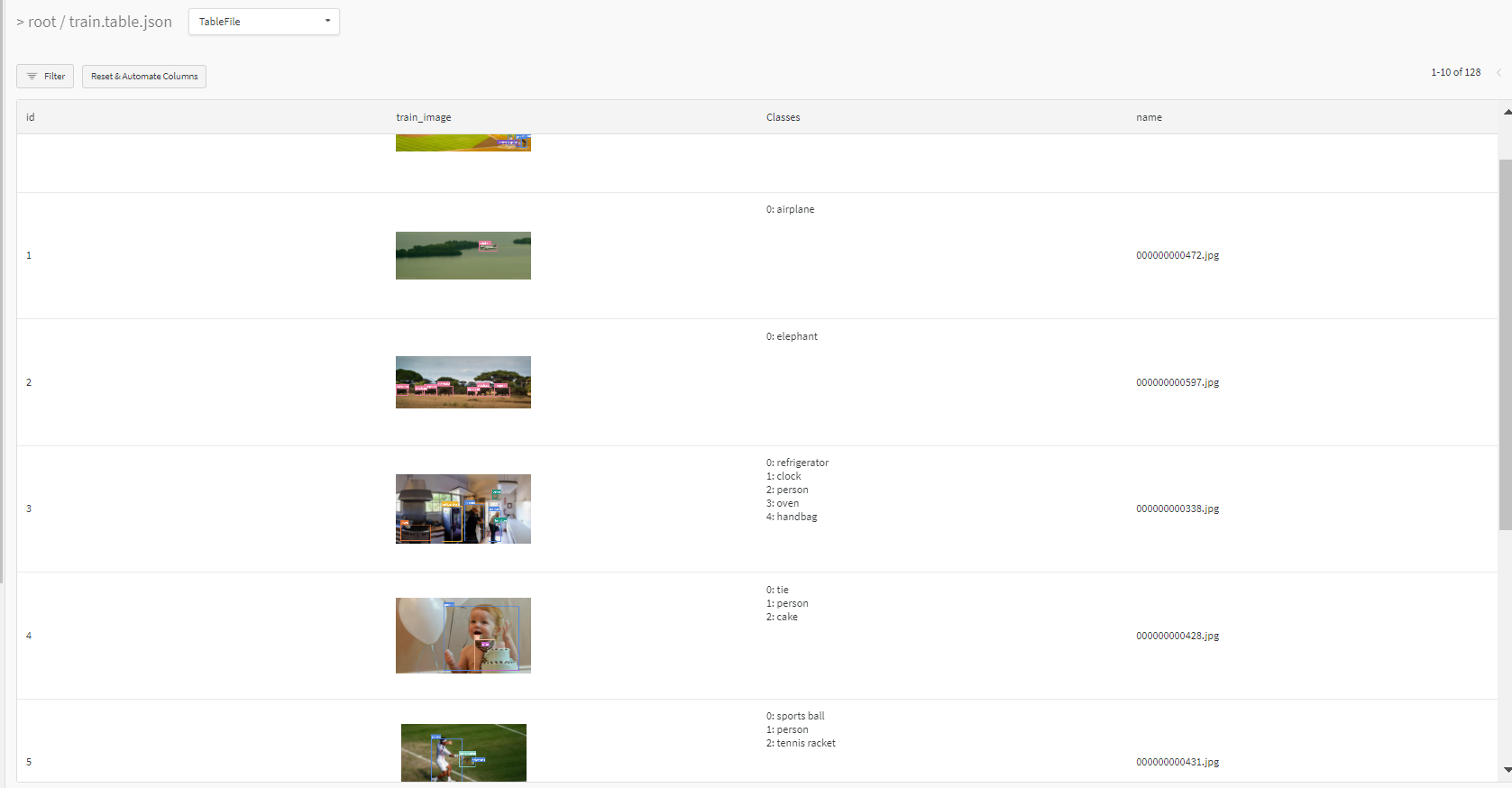
+ $ python utils/logger/wandb/log_dataset.py --data .. --upload_data
+
+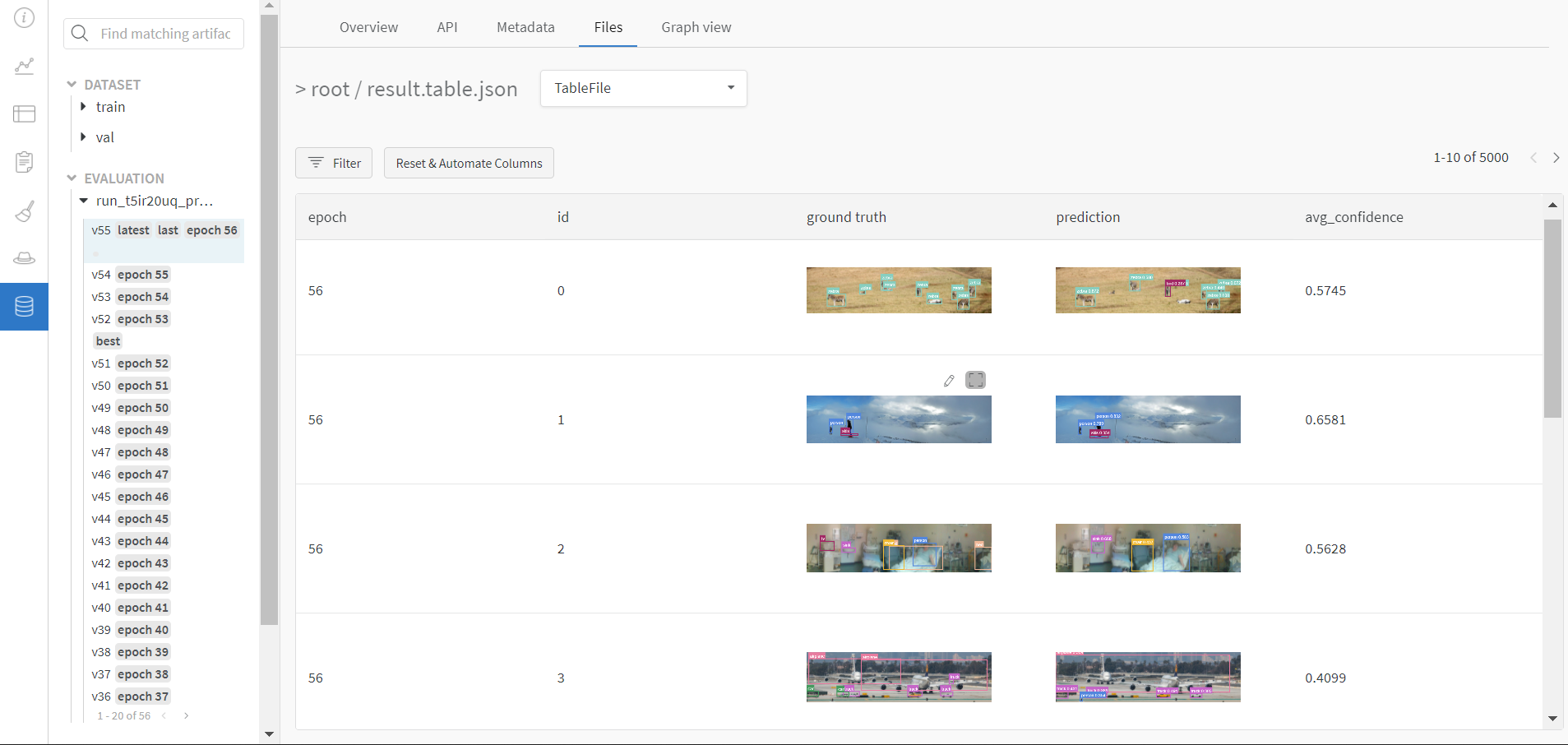
+ $ python utils/logger/wandb/log_dataset.py --data {data}_wandb.yaml
+
+
+ $ python train.py --save_period 1
+
+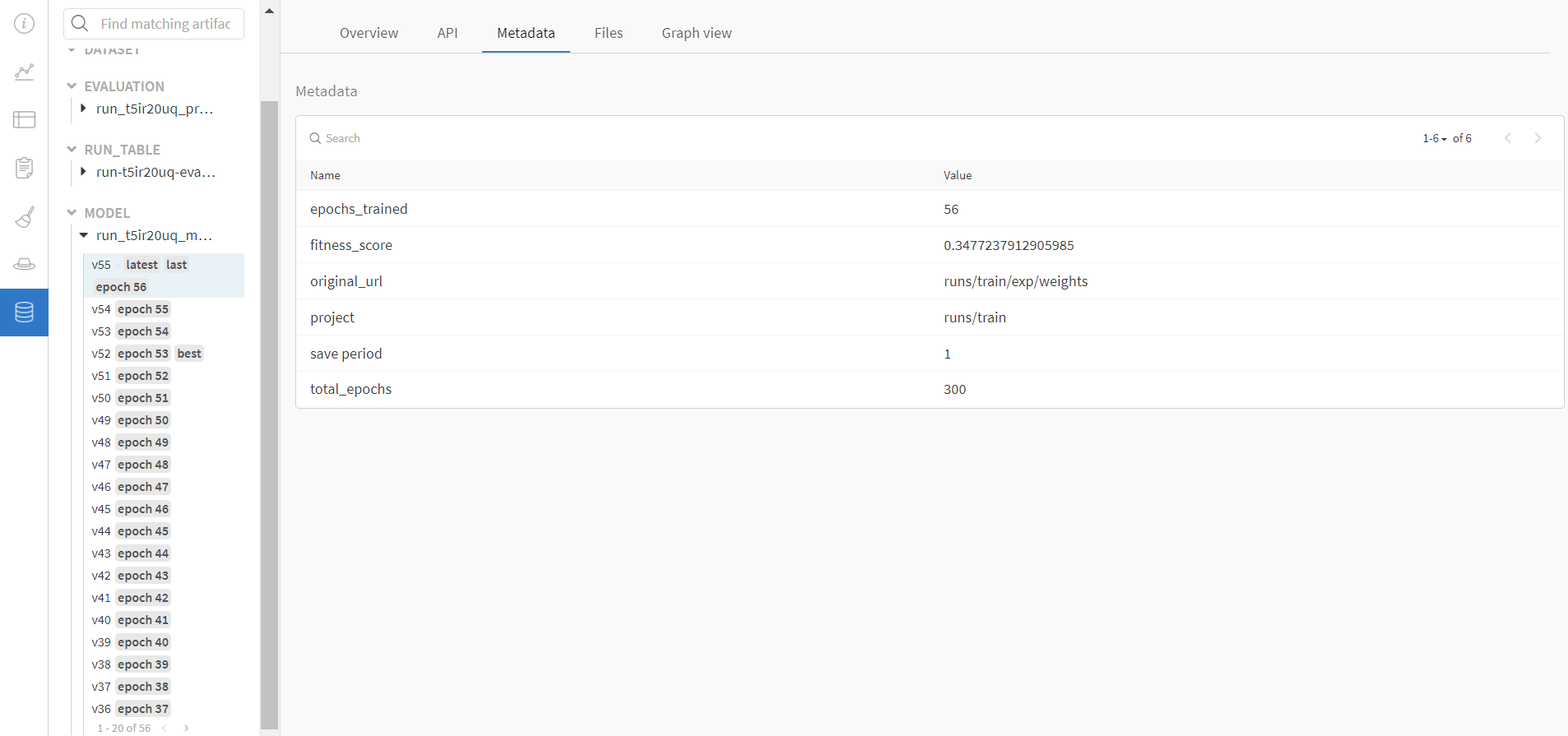
+ --resume argument starts with wandb-artifact:// prefix followed by the run path, i.e, wandb-artifact://username/project/runid . This doesn't require the model checkpoint to be present on the local system.
+
+ $ python train.py --resume wandb-artifact://{run_path}
+
+
+ --upload_dataset or
+ train from _wandb.yaml file and set --save_period
+
+ $ python train.py --resume wandb-artifact://{run_path}
+
+
+  +
+ ## Environments
+ YOLOv5 may be run in any of the following up-to-date verified environments (with all dependencies including [CUDA](https://developer.nvidia.com/cuda)/[CUDNN](https://developer.nvidia.com/cudnn), [Python](https://www.python.org/) and [PyTorch](https://pytorch.org/) preinstalled):
+
+ * **Google Colab and Kaggle** notebooks with free GPU: [](https://colab.research.google.com/github/ultralytics/yolov5/blob/master/tutorial.ipynb) [](https://www.kaggle.com/ultralytics/yolov5)
+ * **Google Cloud** Deep Learning VM. See [GCP Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/GCP-Quickstart)
+ * **Amazon** Deep Learning AMI. See [AWS Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/AWS-Quickstart)
+ * **Docker Image**. See [Docker Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/Docker-Quickstart) [](https://hub.docker.com/r/ultralytics/yolov5)
+
+ ## Status
+ 
+
+ If this badge is green, all [YOLOv5 GitHub Actions](https://github.com/ultralytics/yolov5/actions) Continuous Integration (CI) tests are currently passing. CI tests verify correct operation of YOLOv5 training ([train.py](https://github.com/ultralytics/yolov5/blob/master/train.py)), validation ([val.py](https://github.com/ultralytics/yolov5/blob/master/val.py)), inference ([detect.py](https://github.com/ultralytics/yolov5/blob/master/detect.py)) and export ([export.py](https://github.com/ultralytics/yolov5/blob/master/export.py)) on MacOS, Windows, and Ubuntu every 24 hours and on every commit.
+
diff --git a/utils/loggers/wandb/__init__.py b/utils/loggers/wandb/__init__.py
new file mode 100644
index 00000000000..e69de29bb2d
diff --git a/utils/loggers/wandb/log_dataset.py b/utils/loggers/wandb/log_dataset.py
new file mode 100644
index 00000000000..8447272cdb4
--- /dev/null
+++ b/utils/loggers/wandb/log_dataset.py
@@ -0,0 +1,23 @@
+import argparse
+
+from wandb_utils import WandbLogger
+
+WANDB_ARTIFACT_PREFIX = 'wandb-artifact://'
+
+
+def create_dataset_artifact(opt):
+ logger = WandbLogger(opt, None, job_type='Dataset Creation') # TODO: return value unused
+
+
+if __name__ == '__main__':
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--data', type=str, default='data/coco128.yaml', help='data.yaml path')
+ parser.add_argument('--single-cls', action='store_true', help='train as single-class dataset')
+ parser.add_argument('--project', type=str, default='YOLOv5', help='name of W&B Project')
+ parser.add_argument('--entity', default=None, help='W&B entity')
+ parser.add_argument('--name', type=str, default='log dataset', help='name of W&B run')
+
+ opt = parser.parse_args()
+ opt.resume = False # Explicitly disallow resume check for dataset upload job
+
+ create_dataset_artifact(opt)
diff --git a/utils/loggers/wandb/sweep.py b/utils/loggers/wandb/sweep.py
new file mode 100644
index 00000000000..2dcda508eb5
--- /dev/null
+++ b/utils/loggers/wandb/sweep.py
@@ -0,0 +1,33 @@
+import sys
+from pathlib import Path
+
+import wandb
+
+FILE = Path(__file__).absolute()
+sys.path.append(FILE.parents[3].as_posix()) # add utils/ to path
+
+from train import train, parse_opt
+from utils.general import increment_path
+from utils.torch_utils import select_device
+
+
+def sweep():
+ wandb.init()
+ # Get hyp dict from sweep agent
+ hyp_dict = vars(wandb.config).get("_items")
+
+ # Workaround: get necessary opt args
+ opt = parse_opt(known=True)
+ opt.batch_size = hyp_dict.get("batch_size")
+ opt.save_dir = str(increment_path(Path(opt.project) / opt.name, exist_ok=opt.exist_ok or opt.evolve))
+ opt.epochs = hyp_dict.get("epochs")
+ opt.nosave = True
+ opt.data = hyp_dict.get("data")
+ device = select_device(opt.device, batch_size=opt.batch_size)
+
+ # train
+ train(hyp_dict, opt, device)
+
+
+if __name__ == "__main__":
+ sweep()
diff --git a/utils/loggers/wandb/sweep.yaml b/utils/loggers/wandb/sweep.yaml
new file mode 100644
index 00000000000..c3727de82d4
--- /dev/null
+++ b/utils/loggers/wandb/sweep.yaml
@@ -0,0 +1,143 @@
+# Hyperparameters for training
+# To set range-
+# Provide min and max values as:
+# parameter:
+#
+# min: scalar
+# max: scalar
+# OR
+#
+# Set a specific list of search space-
+# parameter:
+# values: [scalar1, scalar2, scalar3...]
+#
+# You can use grid, bayesian and hyperopt search strategy
+# For more info on configuring sweeps visit - https://docs.wandb.ai/guides/sweeps/configuration
+
+program: utils/loggers/wandb/sweep.py
+method: random
+metric:
+ name: metrics/mAP_0.5
+ goal: maximize
+
+parameters:
+ # hyperparameters: set either min, max range or values list
+ data:
+ value: "data/coco128.yaml"
+ batch_size:
+ values: [64]
+ epochs:
+ values: [10]
+
+ lr0:
+ distribution: uniform
+ min: 1e-5
+ max: 1e-1
+ lrf:
+ distribution: uniform
+ min: 0.01
+ max: 1.0
+ momentum:
+ distribution: uniform
+ min: 0.6
+ max: 0.98
+ weight_decay:
+ distribution: uniform
+ min: 0.0
+ max: 0.001
+ warmup_epochs:
+ distribution: uniform
+ min: 0.0
+ max: 5.0
+ warmup_momentum:
+ distribution: uniform
+ min: 0.0
+ max: 0.95
+ warmup_bias_lr:
+ distribution: uniform
+ min: 0.0
+ max: 0.2
+ box:
+ distribution: uniform
+ min: 0.02
+ max: 0.2
+ cls:
+ distribution: uniform
+ min: 0.2
+ max: 4.0
+ cls_pw:
+ distribution: uniform
+ min: 0.5
+ max: 2.0
+ obj:
+ distribution: uniform
+ min: 0.2
+ max: 4.0
+ obj_pw:
+ distribution: uniform
+ min: 0.5
+ max: 2.0
+ iou_t:
+ distribution: uniform
+ min: 0.1
+ max: 0.7
+ anchor_t:
+ distribution: uniform
+ min: 2.0
+ max: 8.0
+ fl_gamma:
+ distribution: uniform
+ min: 0.0
+ max: 0.1
+ hsv_h:
+ distribution: uniform
+ min: 0.0
+ max: 0.1
+ hsv_s:
+ distribution: uniform
+ min: 0.0
+ max: 0.9
+ hsv_v:
+ distribution: uniform
+ min: 0.0
+ max: 0.9
+ degrees:
+ distribution: uniform
+ min: 0.0
+ max: 45.0
+ translate:
+ distribution: uniform
+ min: 0.0
+ max: 0.9
+ scale:
+ distribution: uniform
+ min: 0.0
+ max: 0.9
+ shear:
+ distribution: uniform
+ min: 0.0
+ max: 10.0
+ perspective:
+ distribution: uniform
+ min: 0.0
+ max: 0.001
+ flipud:
+ distribution: uniform
+ min: 0.0
+ max: 1.0
+ fliplr:
+ distribution: uniform
+ min: 0.0
+ max: 1.0
+ mosaic:
+ distribution: uniform
+ min: 0.0
+ max: 1.0
+ mixup:
+ distribution: uniform
+ min: 0.0
+ max: 1.0
+ copy_paste:
+ distribution: uniform
+ min: 0.0
+ max: 1.0
diff --git a/utils/loggers/wandb/wandb_utils.py b/utils/loggers/wandb/wandb_utils.py
new file mode 100644
index 00000000000..5d495c70517
--- /dev/null
+++ b/utils/loggers/wandb/wandb_utils.py
@@ -0,0 +1,519 @@
+"""Utilities and tools for tracking runs with Weights & Biases."""
+
+import logging
+import os
+import sys
+from contextlib import contextmanager
+from pathlib import Path
+
+import yaml
+from tqdm import tqdm
+
+FILE = Path(__file__).absolute()
+sys.path.append(FILE.parents[3].as_posix()) # add yolov5/ to path
+
+from utils.datasets import LoadImagesAndLabels
+from utils.datasets import img2label_paths
+from utils.general import check_dataset, check_file
+
+try:
+ import wandb
+
+ assert hasattr(wandb, '__version__') # verify package import not local dir
+except (ImportError, AssertionError):
+ wandb = None
+
+RANK = int(os.getenv('RANK', -1))
+WANDB_ARTIFACT_PREFIX = 'wandb-artifact://'
+
+
+def remove_prefix(from_string, prefix=WANDB_ARTIFACT_PREFIX):
+ return from_string[len(prefix):]
+
+
+def check_wandb_config_file(data_config_file):
+ wandb_config = '_wandb.'.join(data_config_file.rsplit('.', 1)) # updated data.yaml path
+ if Path(wandb_config).is_file():
+ return wandb_config
+ return data_config_file
+
+
+def check_wandb_dataset(data_file):
+ is_wandb_artifact = False
+ if check_file(data_file) and data_file.endswith('.yaml'):
+ with open(data_file, errors='ignore') as f:
+ data_dict = yaml.safe_load(f)
+ is_wandb_artifact = (data_dict['train'].startswith(WANDB_ARTIFACT_PREFIX) or
+ data_dict['val'].startswith(WANDB_ARTIFACT_PREFIX))
+ if is_wandb_artifact:
+ return data_dict
+ else:
+ return check_dataset(data_file)
+
+
+def get_run_info(run_path):
+ run_path = Path(remove_prefix(run_path, WANDB_ARTIFACT_PREFIX))
+ run_id = run_path.stem
+ project = run_path.parent.stem
+ entity = run_path.parent.parent.stem
+ model_artifact_name = 'run_' + run_id + '_model'
+ return entity, project, run_id, model_artifact_name
+
+
+def check_wandb_resume(opt):
+ process_wandb_config_ddp_mode(opt) if RANK not in [-1, 0] else None
+ if isinstance(opt.resume, str):
+ if opt.resume.startswith(WANDB_ARTIFACT_PREFIX):
+ if RANK not in [-1, 0]: # For resuming DDP runs
+ entity, project, run_id, model_artifact_name = get_run_info(opt.resume)
+ api = wandb.Api()
+ artifact = api.artifact(entity + '/' + project + '/' + model_artifact_name + ':latest')
+ modeldir = artifact.download()
+ opt.weights = str(Path(modeldir) / "last.pt")
+ return True
+ return None
+
+
+def process_wandb_config_ddp_mode(opt):
+ with open(check_file(opt.data), errors='ignore') as f:
+ data_dict = yaml.safe_load(f) # data dict
+ train_dir, val_dir = None, None
+ if isinstance(data_dict['train'], str) and data_dict['train'].startswith(WANDB_ARTIFACT_PREFIX):
+ api = wandb.Api()
+ train_artifact = api.artifact(remove_prefix(data_dict['train']) + ':' + opt.artifact_alias)
+ train_dir = train_artifact.download()
+ train_path = Path(train_dir) / 'data/images/'
+ data_dict['train'] = str(train_path)
+
+ if isinstance(data_dict['val'], str) and data_dict['val'].startswith(WANDB_ARTIFACT_PREFIX):
+ api = wandb.Api()
+ val_artifact = api.artifact(remove_prefix(data_dict['val']) + ':' + opt.artifact_alias)
+ val_dir = val_artifact.download()
+ val_path = Path(val_dir) / 'data/images/'
+ data_dict['val'] = str(val_path)
+ if train_dir or val_dir:
+ ddp_data_path = str(Path(val_dir) / 'wandb_local_data.yaml')
+ with open(ddp_data_path, 'w') as f:
+ yaml.safe_dump(data_dict, f)
+ opt.data = ddp_data_path
+
+
+class WandbLogger():
+ """Log training runs, datasets, models, and predictions to Weights & Biases.
+
+ This logger sends information to W&B at wandb.ai. By default, this information
+ includes hyperparameters, system configuration and metrics, model metrics,
+ and basic data metrics and analyses.
+
+ By providing additional command line arguments to train.py, datasets,
+ models and predictions can also be logged.
+
+ For more on how this logger is used, see the Weights & Biases documentation:
+ https://docs.wandb.com/guides/integrations/yolov5
+ """
+
+ def __init__(self, opt, run_id=None, job_type='Training'):
+ """
+ - Initialize WandbLogger instance
+ - Upload dataset if opt.upload_dataset is True
+ - Setup trainig processes if job_type is 'Training'
+
+ arguments:
+ opt (namespace) -- Commandline arguments for this run
+ run_id (str) -- Run ID of W&B run to be resumed
+ job_type (str) -- To set the job_type for this run
+
+ """
+ # Pre-training routine --
+ self.job_type = job_type
+ self.wandb, self.wandb_run = wandb, None if not wandb else wandb.run
+ self.val_artifact, self.train_artifact = None, None
+ self.train_artifact_path, self.val_artifact_path = None, None
+ self.result_artifact = None
+ self.val_table, self.result_table = None, None
+ self.bbox_media_panel_images = []
+ self.val_table_path_map = None
+ self.max_imgs_to_log = 16
+ self.wandb_artifact_data_dict = None
+ self.data_dict = None
+ # It's more elegant to stick to 1 wandb.init call, but useful config data is overwritten in the WandbLogger's wandb.init call
+ if isinstance(opt.resume, str): # checks resume from artifact
+ if opt.resume.startswith(WANDB_ARTIFACT_PREFIX):
+ entity, project, run_id, model_artifact_name = get_run_info(opt.resume)
+ model_artifact_name = WANDB_ARTIFACT_PREFIX + model_artifact_name
+ assert wandb, 'install wandb to resume wandb runs'
+ # Resume wandb-artifact:// runs here| workaround for not overwriting wandb.config
+ self.wandb_run = wandb.init(id=run_id,
+ project=project,
+ entity=entity,
+ resume='allow',
+ allow_val_change=True)
+ opt.resume = model_artifact_name
+ elif self.wandb:
+ self.wandb_run = wandb.init(config=opt,
+ resume="allow",
+ project='YOLOv5' if opt.project == 'runs/train' else Path(opt.project).stem,
+ entity=opt.entity,
+ name=opt.name if opt.name != 'exp' else None,
+ job_type=job_type,
+ id=run_id,
+ allow_val_change=True) if not wandb.run else wandb.run
+ if self.wandb_run:
+ if self.job_type == 'Training':
+ if opt.upload_dataset:
+ if not opt.resume:
+ self.wandb_artifact_data_dict = self.check_and_upload_dataset(opt)
+
+ if opt.resume:
+ # resume from artifact
+ if isinstance(opt.resume, str) and opt.resume.startswith(WANDB_ARTIFACT_PREFIX):
+ self.data_dict = dict(self.wandb_run.config.data_dict)
+ else: # local resume
+ self.data_dict = check_wandb_dataset(opt.data)
+ else:
+ self.data_dict = check_wandb_dataset(opt.data)
+ self.wandb_artifact_data_dict = self.wandb_artifact_data_dict or self.data_dict
+
+ # write data_dict to config. useful for resuming from artifacts. Do this only when not resuming.
+ self.wandb_run.config.update({'data_dict': self.wandb_artifact_data_dict},
+ allow_val_change=True)
+ self.setup_training(opt)
+
+ if self.job_type == 'Dataset Creation':
+ self.data_dict = self.check_and_upload_dataset(opt)
+
+ def check_and_upload_dataset(self, opt):
+ """
+ Check if the dataset format is compatible and upload it as W&B artifact
+
+ arguments:
+ opt (namespace)-- Commandline arguments for current run
+
+ returns:
+ Updated dataset info dictionary where local dataset paths are replaced by WAND_ARFACT_PREFIX links.
+ """
+ assert wandb, 'Install wandb to upload dataset'
+ config_path = self.log_dataset_artifact(opt.data,
+ opt.single_cls,
+ 'YOLOv5' if opt.project == 'runs/train' else Path(opt.project).stem)
+ print("Created dataset config file ", config_path)
+ with open(config_path, errors='ignore') as f:
+ wandb_data_dict = yaml.safe_load(f)
+ return wandb_data_dict
+
+ def setup_training(self, opt):
+ """
+ Setup the necessary processes for training YOLO models:
+ - Attempt to download model checkpoint and dataset artifacts if opt.resume stats with WANDB_ARTIFACT_PREFIX
+ - Update data_dict, to contain info of previous run if resumed and the paths of dataset artifact if downloaded
+ - Setup log_dict, initialize bbox_interval
+
+ arguments:
+ opt (namespace) -- commandline arguments for this run
+
+ """
+ self.log_dict, self.current_epoch = {}, 0
+ self.bbox_interval = opt.bbox_interval
+ if isinstance(opt.resume, str):
+ modeldir, _ = self.download_model_artifact(opt)
+ if modeldir:
+ self.weights = Path(modeldir) / "last.pt"
+ config = self.wandb_run.config
+ opt.weights, opt.save_period, opt.batch_size, opt.bbox_interval, opt.epochs, opt.hyp = str(
+ self.weights), config.save_period, config.batch_size, config.bbox_interval, config.epochs, \
+ config.hyp
+ data_dict = self.data_dict
+ if self.val_artifact is None: # If --upload_dataset is set, use the existing artifact, don't download
+ self.train_artifact_path, self.train_artifact = self.download_dataset_artifact(data_dict.get('train'),
+ opt.artifact_alias)
+ self.val_artifact_path, self.val_artifact = self.download_dataset_artifact(data_dict.get('val'),
+ opt.artifact_alias)
+
+ if self.train_artifact_path is not None:
+ train_path = Path(self.train_artifact_path) / 'data/images/'
+ data_dict['train'] = str(train_path)
+ if self.val_artifact_path is not None:
+ val_path = Path(self.val_artifact_path) / 'data/images/'
+ data_dict['val'] = str(val_path)
+
+ if self.val_artifact is not None:
+ self.result_artifact = wandb.Artifact("run_" + wandb.run.id + "_progress", "evaluation")
+ self.result_table = wandb.Table(["epoch", "id", "ground truth", "prediction", "avg_confidence"])
+ self.val_table = self.val_artifact.get("val")
+ if self.val_table_path_map is None:
+ self.map_val_table_path()
+ if opt.bbox_interval == -1:
+ self.bbox_interval = opt.bbox_interval = (opt.epochs // 10) if opt.epochs > 10 else 1
+ train_from_artifact = self.train_artifact_path is not None and self.val_artifact_path is not None
+ # Update the the data_dict to point to local artifacts dir
+ if train_from_artifact:
+ self.data_dict = data_dict
+
+ def download_dataset_artifact(self, path, alias):
+ """
+ download the model checkpoint artifact if the path starts with WANDB_ARTIFACT_PREFIX
+
+ arguments:
+ path -- path of the dataset to be used for training
+ alias (str)-- alias of the artifact to be download/used for training
+
+ returns:
+ (str, wandb.Artifact) -- path of the downladed dataset and it's corresponding artifact object if dataset
+ is found otherwise returns (None, None)
+ """
+ if isinstance(path, str) and path.startswith(WANDB_ARTIFACT_PREFIX):
+ artifact_path = Path(remove_prefix(path, WANDB_ARTIFACT_PREFIX) + ":" + alias)
+ dataset_artifact = wandb.use_artifact(artifact_path.as_posix().replace("\\", "/"))
+ assert dataset_artifact is not None, "'Error: W&B dataset artifact doesn\'t exist'"
+ datadir = dataset_artifact.download()
+ return datadir, dataset_artifact
+ return None, None
+
+ def download_model_artifact(self, opt):
+ """
+ download the model checkpoint artifact if the resume path starts with WANDB_ARTIFACT_PREFIX
+
+ arguments:
+ opt (namespace) -- Commandline arguments for this run
+ """
+ if opt.resume.startswith(WANDB_ARTIFACT_PREFIX):
+ model_artifact = wandb.use_artifact(remove_prefix(opt.resume, WANDB_ARTIFACT_PREFIX) + ":latest")
+ assert model_artifact is not None, 'Error: W&B model artifact doesn\'t exist'
+ modeldir = model_artifact.download()
+ epochs_trained = model_artifact.metadata.get('epochs_trained')
+ total_epochs = model_artifact.metadata.get('total_epochs')
+ is_finished = total_epochs is None
+ assert not is_finished, 'training is finished, can only resume incomplete runs.'
+ return modeldir, model_artifact
+ return None, None
+
+ def log_model(self, path, opt, epoch, fitness_score, best_model=False):
+ """
+ Log the model checkpoint as W&B artifact
+
+ arguments:
+ path (Path) -- Path of directory containing the checkpoints
+ opt (namespace) -- Command line arguments for this run
+ epoch (int) -- Current epoch number
+ fitness_score (float) -- fitness score for current epoch
+ best_model (boolean) -- Boolean representing if the current checkpoint is the best yet.
+ """
+ model_artifact = wandb.Artifact('run_' + wandb.run.id + '_model', type='model', metadata={
+ 'original_url': str(path),
+ 'epochs_trained': epoch + 1,
+ 'save period': opt.save_period,
+ 'project': opt.project,
+ 'total_epochs': opt.epochs,
+ 'fitness_score': fitness_score
+ })
+ model_artifact.add_file(str(path / 'last.pt'), name='last.pt')
+ wandb.log_artifact(model_artifact,
+ aliases=['latest', 'last', 'epoch ' + str(self.current_epoch), 'best' if best_model else ''])
+ print("Saving model artifact on epoch ", epoch + 1)
+
+ def log_dataset_artifact(self, data_file, single_cls, project, overwrite_config=False):
+ """
+ Log the dataset as W&B artifact and return the new data file with W&B links
+
+ arguments:
+ data_file (str) -- the .yaml file with information about the dataset like - path, classes etc.
+ single_class (boolean) -- train multi-class data as single-class
+ project (str) -- project name. Used to construct the artifact path
+ overwrite_config (boolean) -- overwrites the data.yaml file if set to true otherwise creates a new
+ file with _wandb postfix. Eg -> data_wandb.yaml
+
+ returns:
+ the new .yaml file with artifact links. it can be used to start training directly from artifacts
+ """
+ self.data_dict = check_dataset(data_file) # parse and check
+ data = dict(self.data_dict)
+ nc, names = (1, ['item']) if single_cls else (int(data['nc']), data['names'])
+ names = {k: v for k, v in enumerate(names)} # to index dictionary
+ self.train_artifact = self.create_dataset_table(LoadImagesAndLabels(
+ data['train'], rect=True, batch_size=1), names, name='train') if data.get('train') else None
+ self.val_artifact = self.create_dataset_table(LoadImagesAndLabels(
+ data['val'], rect=True, batch_size=1), names, name='val') if data.get('val') else None
+ if data.get('train'):
+ data['train'] = WANDB_ARTIFACT_PREFIX + str(Path(project) / 'train')
+ if data.get('val'):
+ data['val'] = WANDB_ARTIFACT_PREFIX + str(Path(project) / 'val')
+ path = Path(data_file).stem
+ path = (path if overwrite_config else path + '_wandb') + '.yaml' # updated data.yaml path
+ data.pop('download', None)
+ data.pop('path', None)
+ with open(path, 'w') as f:
+ yaml.safe_dump(data, f)
+
+ if self.job_type == 'Training': # builds correct artifact pipeline graph
+ self.wandb_run.use_artifact(self.val_artifact)
+ self.wandb_run.use_artifact(self.train_artifact)
+ self.val_artifact.wait()
+ self.val_table = self.val_artifact.get('val')
+ self.map_val_table_path()
+ else:
+ self.wandb_run.log_artifact(self.train_artifact)
+ self.wandb_run.log_artifact(self.val_artifact)
+ return path
+
+ def map_val_table_path(self):
+ """
+ Map the validation dataset Table like name of file -> it's id in the W&B Table.
+ Useful for - referencing artifacts for evaluation.
+ """
+ self.val_table_path_map = {}
+ print("Mapping dataset")
+ for i, data in enumerate(tqdm(self.val_table.data)):
+ self.val_table_path_map[data[3]] = data[0]
+
+ def create_dataset_table(self, dataset, class_to_id, name='dataset'):
+ """
+ Create and return W&B artifact containing W&B Table of the dataset.
+
+ arguments:
+ dataset (LoadImagesAndLabels) -- instance of LoadImagesAndLabels class used to iterate over the data to build Table
+ class_to_id (dict(int, str)) -- hash map that maps class ids to labels
+ name (str) -- name of the artifact
+
+ returns:
+ dataset artifact to be logged or used
+ """
+ # TODO: Explore multiprocessing to slpit this loop parallely| This is essential for speeding up the the logging
+ artifact = wandb.Artifact(name=name, type="dataset")
+ img_files = tqdm([dataset.path]) if isinstance(dataset.path, str) and Path(dataset.path).is_dir() else None
+ img_files = tqdm(dataset.img_files) if not img_files else img_files
+ for img_file in img_files:
+ if Path(img_file).is_dir():
+ artifact.add_dir(img_file, name='data/images')
+ labels_path = 'labels'.join(dataset.path.rsplit('images', 1))
+ artifact.add_dir(labels_path, name='data/labels')
+ else:
+ artifact.add_file(img_file, name='data/images/' + Path(img_file).name)
+ label_file = Path(img2label_paths([img_file])[0])
+ artifact.add_file(str(label_file),
+ name='data/labels/' + label_file.name) if label_file.exists() else None
+ table = wandb.Table(columns=["id", "train_image", "Classes", "name"])
+ class_set = wandb.Classes([{'id': id, 'name': name} for id, name in class_to_id.items()])
+ for si, (img, labels, paths, shapes) in enumerate(tqdm(dataset)):
+ box_data, img_classes = [], {}
+ for cls, *xywh in labels[:, 1:].tolist():
+ cls = int(cls)
+ box_data.append({"position": {"middle": [xywh[0], xywh[1]], "width": xywh[2], "height": xywh[3]},
+ "class_id": cls,
+ "box_caption": "%s" % (class_to_id[cls])})
+ img_classes[cls] = class_to_id[cls]
+ boxes = {"ground_truth": {"box_data": box_data, "class_labels": class_to_id}} # inference-space
+ table.add_data(si, wandb.Image(paths, classes=class_set, boxes=boxes), list(img_classes.values()),
+ Path(paths).name)
+ artifact.add(table, name)
+ return artifact
+
+ def log_training_progress(self, predn, path, names):
+ """
+ Build evaluation Table. Uses reference from validation dataset table.
+
+ arguments:
+ predn (list): list of predictions in the native space in the format - [xmin, ymin, xmax, ymax, confidence, class]
+ path (str): local path of the current evaluation image
+ names (dict(int, str)): hash map that maps class ids to labels
+ """
+ class_set = wandb.Classes([{'id': id, 'name': name} for id, name in names.items()])
+ box_data = []
+ total_conf = 0
+ for *xyxy, conf, cls in predn.tolist():
+ if conf >= 0.25:
+ box_data.append(
+ {"position": {"minX": xyxy[0], "minY": xyxy[1], "maxX": xyxy[2], "maxY": xyxy[3]},
+ "class_id": int(cls),
+ "box_caption": "%s %.3f" % (names[cls], conf),
+ "scores": {"class_score": conf},
+ "domain": "pixel"})
+ total_conf = total_conf + conf
+ boxes = {"predictions": {"box_data": box_data, "class_labels": names}} # inference-space
+ id = self.val_table_path_map[Path(path).name]
+ self.result_table.add_data(self.current_epoch,
+ id,
+ self.val_table.data[id][1],
+ wandb.Image(self.val_table.data[id][1], boxes=boxes, classes=class_set),
+ total_conf / max(1, len(box_data))
+ )
+
+ def val_one_image(self, pred, predn, path, names, im):
+ """
+ Log validation data for one image. updates the result Table if validation dataset is uploaded and log bbox media panel
+
+ arguments:
+ pred (list): list of scaled predictions in the format - [xmin, ymin, xmax, ymax, confidence, class]
+ predn (list): list of predictions in the native space - [xmin, ymin, xmax, ymax, confidence, class]
+ path (str): local path of the current evaluation image
+ """
+ if self.val_table and self.result_table: # Log Table if Val dataset is uploaded as artifact
+ self.log_training_progress(predn, path, names)
+
+ if len(self.bbox_media_panel_images) < self.max_imgs_to_log and self.current_epoch > 0:
+ if self.current_epoch % self.bbox_interval == 0:
+ box_data = [{"position": {"minX": xyxy[0], "minY": xyxy[1], "maxX": xyxy[2], "maxY": xyxy[3]},
+ "class_id": int(cls),
+ "box_caption": "%s %.3f" % (names[cls], conf),
+ "scores": {"class_score": conf},
+ "domain": "pixel"} for *xyxy, conf, cls in pred.tolist()]
+ boxes = {"predictions": {"box_data": box_data, "class_labels": names}} # inference-space
+ self.bbox_media_panel_images.append(wandb.Image(im, boxes=boxes, caption=path.name))
+
+ def log(self, log_dict):
+ """
+ save the metrics to the logging dictionary
+
+ arguments:
+ log_dict (Dict) -- metrics/media to be logged in current step
+ """
+ if self.wandb_run:
+ for key, value in log_dict.items():
+ self.log_dict[key] = value
+
+ def end_epoch(self, best_result=False):
+ """
+ commit the log_dict, model artifacts and Tables to W&B and flush the log_dict.
+
+ arguments:
+ best_result (boolean): Boolean representing if the result of this evaluation is best or not
+ """
+ if self.wandb_run:
+ with all_logging_disabled():
+ if self.bbox_media_panel_images:
+ self.log_dict["Bounding Box Debugger/Images"] = self.bbox_media_panel_images
+ wandb.log(self.log_dict)
+ self.log_dict = {}
+ self.bbox_media_panel_images = []
+ if self.result_artifact:
+ self.result_artifact.add(self.result_table, 'result')
+ wandb.log_artifact(self.result_artifact, aliases=['latest', 'last', 'epoch ' + str(self.current_epoch),
+ ('best' if best_result else '')])
+
+ wandb.log({"evaluation": self.result_table})
+ self.result_table = wandb.Table(["epoch", "id", "ground truth", "prediction", "avg_confidence"])
+ self.result_artifact = wandb.Artifact("run_" + wandb.run.id + "_progress", "evaluation")
+
+ def finish_run(self):
+ """
+ Log metrics if any and finish the current W&B run
+ """
+ if self.wandb_run:
+ if self.log_dict:
+ with all_logging_disabled():
+ wandb.log(self.log_dict)
+ wandb.run.finish()
+
+
+@contextmanager
+def all_logging_disabled(highest_level=logging.CRITICAL):
+ """ source - https://gist.github.com/simon-weber/7853144
+ A context manager that will prevent any logging messages triggered during the body from being processed.
+ :param highest_level: the maximum logging level in use.
+ This would only need to be changed if a custom level greater than CRITICAL is defined.
+ """
+ previous_level = logging.root.manager.disable
+ logging.disable(highest_level)
+ try:
+ yield
+ finally:
+ logging.disable(previous_level)
diff --git a/utils/loss.py b/utils/loss.py
new file mode 100644
index 00000000000..29aac3191c1
--- /dev/null
+++ b/utils/loss.py
@@ -0,0 +1,223 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Loss functions
+"""
+
+import torch
+import torch.nn as nn
+
+from utils.metrics import bbox_iou
+from utils.torch_utils import is_parallel
+
+
+def smooth_BCE(eps=0.1): # https://github.com/ultralytics/yolov3/issues/238#issuecomment-598028441
+ # return positive, negative label smoothing BCE targets
+ return 1.0 - 0.5 * eps, 0.5 * eps
+
+
+class BCEBlurWithLogitsLoss(nn.Module):
+ # BCEwithLogitLoss() with reduced missing label effects.
+ def __init__(self, alpha=0.05):
+ super(BCEBlurWithLogitsLoss, self).__init__()
+ self.loss_fcn = nn.BCEWithLogitsLoss(reduction='none') # must be nn.BCEWithLogitsLoss()
+ self.alpha = alpha
+
+ def forward(self, pred, true):
+ loss = self.loss_fcn(pred, true)
+ pred = torch.sigmoid(pred) # prob from logits
+ dx = pred - true # reduce only missing label effects
+ # dx = (pred - true).abs() # reduce missing label and false label effects
+ alpha_factor = 1 - torch.exp((dx - 1) / (self.alpha + 1e-4))
+ loss *= alpha_factor
+ return loss.mean()
+
+
+class FocalLoss(nn.Module):
+ # Wraps focal loss around existing loss_fcn(), i.e. criteria = FocalLoss(nn.BCEWithLogitsLoss(), gamma=1.5)
+ def __init__(self, loss_fcn, gamma=1.5, alpha=0.25):
+ super(FocalLoss, self).__init__()
+ self.loss_fcn = loss_fcn # must be nn.BCEWithLogitsLoss()
+ self.gamma = gamma
+ self.alpha = alpha
+ self.reduction = loss_fcn.reduction
+ self.loss_fcn.reduction = 'none' # required to apply FL to each element
+
+ def forward(self, pred, true):
+ loss = self.loss_fcn(pred, true)
+ # p_t = torch.exp(-loss)
+ # loss *= self.alpha * (1.000001 - p_t) ** self.gamma # non-zero power for gradient stability
+
+ # TF implementation https://github.com/tensorflow/addons/blob/v0.7.1/tensorflow_addons/losses/focal_loss.py
+ pred_prob = torch.sigmoid(pred) # prob from logits
+ p_t = true * pred_prob + (1 - true) * (1 - pred_prob)
+ alpha_factor = true * self.alpha + (1 - true) * (1 - self.alpha)
+ modulating_factor = (1.0 - p_t) ** self.gamma
+ loss *= alpha_factor * modulating_factor
+
+ if self.reduction == 'mean':
+ return loss.mean()
+ elif self.reduction == 'sum':
+ return loss.sum()
+ else: # 'none'
+ return loss
+
+
+class QFocalLoss(nn.Module):
+ # Wraps Quality focal loss around existing loss_fcn(), i.e. criteria = FocalLoss(nn.BCEWithLogitsLoss(), gamma=1.5)
+ def __init__(self, loss_fcn, gamma=1.5, alpha=0.25):
+ super(QFocalLoss, self).__init__()
+ self.loss_fcn = loss_fcn # must be nn.BCEWithLogitsLoss()
+ self.gamma = gamma
+ self.alpha = alpha
+ self.reduction = loss_fcn.reduction
+ self.loss_fcn.reduction = 'none' # required to apply FL to each element
+
+ def forward(self, pred, true):
+ loss = self.loss_fcn(pred, true)
+
+ pred_prob = torch.sigmoid(pred) # prob from logits
+ alpha_factor = true * self.alpha + (1 - true) * (1 - self.alpha)
+ modulating_factor = torch.abs(true - pred_prob) ** self.gamma
+ loss *= alpha_factor * modulating_factor
+
+ if self.reduction == 'mean':
+ return loss.mean()
+ elif self.reduction == 'sum':
+ return loss.sum()
+ else: # 'none'
+ return loss
+
+
+class ComputeLoss:
+ # Compute losses
+ def __init__(self, model, autobalance=False):
+ super(ComputeLoss, self).__init__()
+ self.sort_obj_iou = False
+ device = next(model.parameters()).device # get model device
+ h = model.hyp # hyperparameters
+
+ # Define criteria
+ BCEcls = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['cls_pw']], device=device))
+ BCEobj = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['obj_pw']], device=device))
+
+ # Class label smoothing https://arxiv.org/pdf/1902.04103.pdf eqn 3
+ self.cp, self.cn = smooth_BCE(eps=h.get('label_smoothing', 0.0)) # positive, negative BCE targets
+
+ # Focal loss
+ g = h['fl_gamma'] # focal loss gamma
+ if g > 0:
+ BCEcls, BCEobj = FocalLoss(BCEcls, g), FocalLoss(BCEobj, g)
+
+ det = model.module.model[-1] if is_parallel(model) else model.model[-1] # Detect() module
+ self.balance = {3: [4.0, 1.0, 0.4]}.get(det.nl, [4.0, 1.0, 0.25, 0.06, .02]) # P3-P7
+ self.ssi = list(det.stride).index(16) if autobalance else 0 # stride 16 index
+ self.BCEcls, self.BCEobj, self.gr, self.hyp, self.autobalance = BCEcls, BCEobj, 1.0, h, autobalance
+ for k in 'na', 'nc', 'nl', 'anchors':
+ setattr(self, k, getattr(det, k))
+
+ def __call__(self, p, targets): # predictions, targets, model
+ device = targets.device
+ lcls, lbox, lobj = torch.zeros(1, device=device), torch.zeros(1, device=device), torch.zeros(1, device=device)
+ tcls, tbox, indices, anchors = self.build_targets(p, targets) # targets
+
+ # Losses
+ for i, pi in enumerate(p): # layer index, layer predictions
+ b, a, gj, gi = indices[i] # image, anchor, gridy, gridx
+ tobj = torch.zeros_like(pi[..., 0], device=device) # target obj
+
+ n = b.shape[0] # number of targets
+ if n:
+ ps = pi[b, a, gj, gi] # prediction subset corresponding to targets
+
+ # Regression
+ pxy = ps[:, :2].sigmoid() * 2. - 0.5
+ pwh = (ps[:, 2:4].sigmoid() * 2) ** 2 * anchors[i]
+ pbox = torch.cat((pxy, pwh), 1) # predicted box
+ iou = bbox_iou(pbox.T, tbox[i], x1y1x2y2=False, CIoU=True) # iou(prediction, target)
+ lbox += (1.0 - iou).mean() # iou loss
+
+ # Objectness
+ score_iou = iou.detach().clamp(0).type(tobj.dtype)
+ if self.sort_obj_iou:
+ sort_id = torch.argsort(score_iou)
+ b, a, gj, gi, score_iou = b[sort_id], a[sort_id], gj[sort_id], gi[sort_id], score_iou[sort_id]
+ tobj[b, a, gj, gi] = (1.0 - self.gr) + self.gr * score_iou # iou ratio
+
+ # Classification
+ if self.nc > 1: # cls loss (only if multiple classes)
+ t = torch.full_like(ps[:, 5:], self.cn, device=device) # targets
+ t[range(n), tcls[i]] = self.cp
+ lcls += self.BCEcls(ps[:, 5:], t) # BCE
+
+ # Append targets to text file
+ # with open('targets.txt', 'a') as file:
+ # [file.write('%11.5g ' * 4 % tuple(x) + '\n') for x in torch.cat((txy[i], twh[i]), 1)]
+
+ obji = self.BCEobj(pi[..., 4], tobj)
+ lobj += obji * self.balance[i] # obj loss
+ if self.autobalance:
+ self.balance[i] = self.balance[i] * 0.9999 + 0.0001 / obji.detach().item()
+
+ if self.autobalance:
+ self.balance = [x / self.balance[self.ssi] for x in self.balance]
+ lbox *= self.hyp['box']
+ lobj *= self.hyp['obj']
+ lcls *= self.hyp['cls']
+ bs = tobj.shape[0] # batch size
+
+ return (lbox + lobj + lcls) * bs, torch.cat((lbox, lobj, lcls)).detach()
+
+ def build_targets(self, p, targets):
+ # Build targets for compute_loss(), input targets(image,class,x,y,w,h)
+ na, nt = self.na, targets.shape[0] # number of anchors, targets
+ tcls, tbox, indices, anch = [], [], [], []
+ gain = torch.ones(7, device=targets.device) # normalized to gridspace gain
+ ai = torch.arange(na, device=targets.device).float().view(na, 1).repeat(1, nt) # same as .repeat_interleave(nt)
+ targets = torch.cat((targets.repeat(na, 1, 1), ai[:, :, None]), 2) # append anchor indices
+
+ g = 0.5 # bias
+ off = torch.tensor([[0, 0],
+ [1, 0], [0, 1], [-1, 0], [0, -1], # j,k,l,m
+ # [1, 1], [1, -1], [-1, 1], [-1, -1], # jk,jm,lk,lm
+ ], device=targets.device).float() * g # offsets
+
+ for i in range(self.nl):
+ anchors = self.anchors[i]
+ gain[2:6] = torch.tensor(p[i].shape)[[3, 2, 3, 2]] # xyxy gain
+
+ # Match targets to anchors
+ t = targets * gain
+ if nt:
+ # Matches
+ r = t[:, :, 4:6] / anchors[:, None] # wh ratio
+ j = torch.max(r, 1. / r).max(2)[0] < self.hyp['anchor_t'] # compare
+ # j = wh_iou(anchors, t[:, 4:6]) > model.hyp['iou_t'] # iou(3,n)=wh_iou(anchors(3,2), gwh(n,2))
+ t = t[j] # filter
+
+ # Offsets
+ gxy = t[:, 2:4] # grid xy
+ gxi = gain[[2, 3]] - gxy # inverse
+ j, k = ((gxy % 1. < g) & (gxy > 1.)).T
+ l, m = ((gxi % 1. < g) & (gxi > 1.)).T
+ j = torch.stack((torch.ones_like(j), j, k, l, m))
+ t = t.repeat((5, 1, 1))[j]
+ offsets = (torch.zeros_like(gxy)[None] + off[:, None])[j]
+ else:
+ t = targets[0]
+ offsets = 0
+
+ # Define
+ b, c = t[:, :2].long().T # image, class
+ gxy = t[:, 2:4] # grid xy
+ gwh = t[:, 4:6] # grid wh
+ gij = (gxy - offsets).long()
+ gi, gj = gij.T # grid xy indices
+
+ # Append
+ a = t[:, 6].long() # anchor indices
+ indices.append((b, a, gj.clamp_(0, gain[3] - 1), gi.clamp_(0, gain[2] - 1))) # image, anchor, grid indices
+ tbox.append(torch.cat((gxy - gij, gwh), 1)) # box
+ anch.append(anchors[a]) # anchors
+ tcls.append(c) # class
+
+ return tcls, tbox, indices, anch
diff --git a/utils/metrics.py b/utils/metrics.py
new file mode 100644
index 00000000000..4f1b5e2d2c2
--- /dev/null
+++ b/utils/metrics.py
@@ -0,0 +1,333 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Model validation metrics
+"""
+
+import math
+import warnings
+from pathlib import Path
+
+import matplotlib.pyplot as plt
+import numpy as np
+import torch
+
+
+def fitness(x):
+ # Model fitness as a weighted combination of metrics
+ w = [0.0, 0.0, 0.1, 0.9] # weights for [P, R, mAP@0.5, mAP@0.5:0.95]
+ return (x[:, :4] * w).sum(1)
+
+
+def ap_per_class(tp, conf, pred_cls, target_cls, plot=False, save_dir='.', names=()):
+ """ Compute the average precision, given the recall and precision curves.
+ Source: https://github.com/rafaelpadilla/Object-Detection-Metrics.
+ # Arguments
+ tp: True positives (nparray, nx1 or nx10).
+ conf: Objectness value from 0-1 (nparray).
+ pred_cls: Predicted object classes (nparray).
+ target_cls: True object classes (nparray).
+ plot: Plot precision-recall curve at mAP@0.5
+ save_dir: Plot save directory
+ # Returns
+ The average precision as computed in py-faster-rcnn.
+ """
+
+ # Sort by objectness
+ i = np.argsort(-conf)
+ tp, conf, pred_cls = tp[i], conf[i], pred_cls[i]
+
+ # Find unique classes
+ unique_classes = np.unique(target_cls)
+ nc = unique_classes.shape[0] # number of classes, number of detections
+
+ # Create Precision-Recall curve and compute AP for each class
+ px, py = np.linspace(0, 1, 1000), [] # for plotting
+ ap, p, r = np.zeros((nc, tp.shape[1])), np.zeros((nc, 1000)), np.zeros((nc, 1000))
+ for ci, c in enumerate(unique_classes):
+ i = pred_cls == c
+ n_l = (target_cls == c).sum() # number of labels
+ n_p = i.sum() # number of predictions
+
+ if n_p == 0 or n_l == 0:
+ continue
+ else:
+ # Accumulate FPs and TPs
+ fpc = (1 - tp[i]).cumsum(0)
+ tpc = tp[i].cumsum(0)
+
+ # Recall
+ recall = tpc / (n_l + 1e-16) # recall curve
+ r[ci] = np.interp(-px, -conf[i], recall[:, 0], left=0) # negative x, xp because xp decreases
+
+ # Precision
+ precision = tpc / (tpc + fpc) # precision curve
+ p[ci] = np.interp(-px, -conf[i], precision[:, 0], left=1) # p at pr_score
+
+ # AP from recall-precision curve
+ for j in range(tp.shape[1]):
+ ap[ci, j], mpre, mrec = compute_ap(recall[:, j], precision[:, j])
+ if plot and j == 0:
+ py.append(np.interp(px, mrec, mpre)) # precision at mAP@0.5
+
+ # Compute F1 (harmonic mean of precision and recall)
+ f1 = 2 * p * r / (p + r + 1e-16)
+ if plot:
+ plot_pr_curve(px, py, ap, Path(save_dir) / 'PR_curve.png', names)
+ plot_mc_curve(px, f1, Path(save_dir) / 'F1_curve.png', names, ylabel='F1')
+ plot_mc_curve(px, p, Path(save_dir) / 'P_curve.png', names, ylabel='Precision')
+ plot_mc_curve(px, r, Path(save_dir) / 'R_curve.png', names, ylabel='Recall')
+
+ i = f1.mean(0).argmax() # max F1 index
+ return p[:, i], r[:, i], ap, f1[:, i], unique_classes.astype('int32')
+
+
+def compute_ap(recall, precision):
+ """ Compute the average precision, given the recall and precision curves
+ # Arguments
+ recall: The recall curve (list)
+ precision: The precision curve (list)
+ # Returns
+ Average precision, precision curve, recall curve
+ """
+
+ # Append sentinel values to beginning and end
+ mrec = np.concatenate(([0.0], recall, [1.0]))
+ mpre = np.concatenate(([1.0], precision, [0.0]))
+
+ # Compute the precision envelope
+ mpre = np.flip(np.maximum.accumulate(np.flip(mpre)))
+
+ # Integrate area under curve
+ method = 'interp' # methods: 'continuous', 'interp'
+ if method == 'interp':
+ x = np.linspace(0, 1, 101) # 101-point interp (COCO)
+ ap = np.trapz(np.interp(x, mrec, mpre), x) # integrate
+ else: # 'continuous'
+ i = np.where(mrec[1:] != mrec[:-1])[0] # points where x axis (recall) changes
+ ap = np.sum((mrec[i + 1] - mrec[i]) * mpre[i + 1]) # area under curve
+
+ return ap, mpre, mrec
+
+
+class ConfusionMatrix:
+ # Updated version of https://github.com/kaanakan/object_detection_confusion_matrix
+ def __init__(self, nc, conf=0.25, iou_thres=0.45):
+ self.matrix = np.zeros((nc + 1, nc + 1))
+ self.nc = nc # number of classes
+ self.conf = conf
+ self.iou_thres = iou_thres
+
+ def process_batch(self, detections, labels):
+ """
+ Return intersection-over-union (Jaccard index) of boxes.
+ Both sets of boxes are expected to be in (x1, y1, x2, y2) format.
+ Arguments:
+ detections (Array[N, 6]), x1, y1, x2, y2, conf, class
+ labels (Array[M, 5]), class, x1, y1, x2, y2
+ Returns:
+ None, updates confusion matrix accordingly
+ """
+ detections = detections[detections[:, 4] > self.conf]
+ gt_classes = labels[:, 0].int()
+ detection_classes = detections[:, 5].int()
+ iou = box_iou(labels[:, 1:], detections[:, :4])
+
+ x = torch.where(iou > self.iou_thres)
+ if x[0].shape[0]:
+ matches = torch.cat((torch.stack(x, 1), iou[x[0], x[1]][:, None]), 1).cpu().numpy()
+ if x[0].shape[0] > 1:
+ matches = matches[matches[:, 2].argsort()[::-1]]
+ matches = matches[np.unique(matches[:, 1], return_index=True)[1]]
+ matches = matches[matches[:, 2].argsort()[::-1]]
+ matches = matches[np.unique(matches[:, 0], return_index=True)[1]]
+ else:
+ matches = np.zeros((0, 3))
+
+ n = matches.shape[0] > 0
+ m0, m1, _ = matches.transpose().astype(np.int16)
+ for i, gc in enumerate(gt_classes):
+ j = m0 == i
+ if n and sum(j) == 1:
+ self.matrix[detection_classes[m1[j]], gc] += 1 # correct
+ else:
+ self.matrix[self.nc, gc] += 1 # background FP
+
+ if n:
+ for i, dc in enumerate(detection_classes):
+ if not any(m1 == i):
+ self.matrix[dc, self.nc] += 1 # background FN
+
+ def matrix(self):
+ return self.matrix
+
+ def plot(self, normalize=True, save_dir='', names=()):
+ try:
+ import seaborn as sn
+
+ array = self.matrix / ((self.matrix.sum(0).reshape(1, -1) + 1E-6) if normalize else 1) # normalize columns
+ array[array < 0.005] = np.nan # don't annotate (would appear as 0.00)
+
+ fig = plt.figure(figsize=(12, 9), tight_layout=True)
+ sn.set(font_scale=1.0 if self.nc < 50 else 0.8) # for label size
+ labels = (0 < len(names) < 99) and len(names) == self.nc # apply names to ticklabels
+ with warnings.catch_warnings():
+ warnings.simplefilter('ignore') # suppress empty matrix RuntimeWarning: All-NaN slice encountered
+ sn.heatmap(array, annot=self.nc < 30, annot_kws={"size": 8}, cmap='Blues', fmt='.2f', square=True,
+ xticklabels=names + ['background FP'] if labels else "auto",
+ yticklabels=names + ['background FN'] if labels else "auto").set_facecolor((1, 1, 1))
+ fig.axes[0].set_xlabel('True')
+ fig.axes[0].set_ylabel('Predicted')
+ fig.savefig(Path(save_dir) / 'confusion_matrix.png', dpi=250)
+ plt.close()
+ except Exception as e:
+ print(f'WARNING: ConfusionMatrix plot failure: {e}')
+
+ def print(self):
+ for i in range(self.nc + 1):
+ print(' '.join(map(str, self.matrix[i])))
+
+
+def bbox_iou(box1, box2, x1y1x2y2=True, GIoU=False, DIoU=False, CIoU=False, eps=1e-7):
+ # Returns the IoU of box1 to box2. box1 is 4, box2 is nx4
+ box2 = box2.T
+
+ # Get the coordinates of bounding boxes
+ if x1y1x2y2: # x1, y1, x2, y2 = box1
+ b1_x1, b1_y1, b1_x2, b1_y2 = box1[0], box1[1], box1[2], box1[3]
+ b2_x1, b2_y1, b2_x2, b2_y2 = box2[0], box2[1], box2[2], box2[3]
+ else: # transform from xywh to xyxy
+ b1_x1, b1_x2 = box1[0] - box1[2] / 2, box1[0] + box1[2] / 2
+ b1_y1, b1_y2 = box1[1] - box1[3] / 2, box1[1] + box1[3] / 2
+ b2_x1, b2_x2 = box2[0] - box2[2] / 2, box2[0] + box2[2] / 2
+ b2_y1, b2_y2 = box2[1] - box2[3] / 2, box2[1] + box2[3] / 2
+
+ # Intersection area
+ inter = (torch.min(b1_x2, b2_x2) - torch.max(b1_x1, b2_x1)).clamp(0) * \
+ (torch.min(b1_y2, b2_y2) - torch.max(b1_y1, b2_y1)).clamp(0)
+
+ # Union Area
+ w1, h1 = b1_x2 - b1_x1, b1_y2 - b1_y1 + eps
+ w2, h2 = b2_x2 - b2_x1, b2_y2 - b2_y1 + eps
+ union = w1 * h1 + w2 * h2 - inter + eps
+
+ iou = inter / union
+ if GIoU or DIoU or CIoU:
+ cw = torch.max(b1_x2, b2_x2) - torch.min(b1_x1, b2_x1) # convex (smallest enclosing box) width
+ ch = torch.max(b1_y2, b2_y2) - torch.min(b1_y1, b2_y1) # convex height
+ if CIoU or DIoU: # Distance or Complete IoU https://arxiv.org/abs/1911.08287v1
+ c2 = cw ** 2 + ch ** 2 + eps # convex diagonal squared
+ rho2 = ((b2_x1 + b2_x2 - b1_x1 - b1_x2) ** 2 +
+ (b2_y1 + b2_y2 - b1_y1 - b1_y2) ** 2) / 4 # center distance squared
+ if DIoU:
+ return iou - rho2 / c2 # DIoU
+ elif CIoU: # https://github.com/Zzh-tju/DIoU-SSD-pytorch/blob/master/utils/box/box_utils.py#L47
+ v = (4 / math.pi ** 2) * torch.pow(torch.atan(w2 / h2) - torch.atan(w1 / h1), 2)
+ with torch.no_grad():
+ alpha = v / (v - iou + (1 + eps))
+ return iou - (rho2 / c2 + v * alpha) # CIoU
+ else: # GIoU https://arxiv.org/pdf/1902.09630.pdf
+ c_area = cw * ch + eps # convex area
+ return iou - (c_area - union) / c_area # GIoU
+ else:
+ return iou # IoU
+
+
+def box_iou(box1, box2):
+ # https://github.com/pytorch/vision/blob/master/torchvision/ops/boxes.py
+ """
+ Return intersection-over-union (Jaccard index) of boxes.
+ Both sets of boxes are expected to be in (x1, y1, x2, y2) format.
+ Arguments:
+ box1 (Tensor[N, 4])
+ box2 (Tensor[M, 4])
+ Returns:
+ iou (Tensor[N, M]): the NxM matrix containing the pairwise
+ IoU values for every element in boxes1 and boxes2
+ """
+
+ def box_area(box):
+ # box = 4xn
+ return (box[2] - box[0]) * (box[3] - box[1])
+
+ area1 = box_area(box1.T)
+ area2 = box_area(box2.T)
+
+ # inter(N,M) = (rb(N,M,2) - lt(N,M,2)).clamp(0).prod(2)
+ inter = (torch.min(box1[:, None, 2:], box2[:, 2:]) - torch.max(box1[:, None, :2], box2[:, :2])).clamp(0).prod(2)
+ return inter / (area1[:, None] + area2 - inter) # iou = inter / (area1 + area2 - inter)
+
+
+def bbox_ioa(box1, box2, eps=1E-7):
+ """ Returns the intersection over box2 area given box1, box2. Boxes are x1y1x2y2
+ box1: np.array of shape(4)
+ box2: np.array of shape(nx4)
+ returns: np.array of shape(n)
+ """
+
+ box2 = box2.transpose()
+
+ # Get the coordinates of bounding boxes
+ b1_x1, b1_y1, b1_x2, b1_y2 = box1[0], box1[1], box1[2], box1[3]
+ b2_x1, b2_y1, b2_x2, b2_y2 = box2[0], box2[1], box2[2], box2[3]
+
+ # Intersection area
+ inter_area = (np.minimum(b1_x2, b2_x2) - np.maximum(b1_x1, b2_x1)).clip(0) * \
+ (np.minimum(b1_y2, b2_y2) - np.maximum(b1_y1, b2_y1)).clip(0)
+
+ # box2 area
+ box2_area = (b2_x2 - b2_x1) * (b2_y2 - b2_y1) + eps
+
+ # Intersection over box2 area
+ return inter_area / box2_area
+
+
+def wh_iou(wh1, wh2):
+ # Returns the nxm IoU matrix. wh1 is nx2, wh2 is mx2
+ wh1 = wh1[:, None] # [N,1,2]
+ wh2 = wh2[None] # [1,M,2]
+ inter = torch.min(wh1, wh2).prod(2) # [N,M]
+ return inter / (wh1.prod(2) + wh2.prod(2) - inter) # iou = inter / (area1 + area2 - inter)
+
+
+# Plots ----------------------------------------------------------------------------------------------------------------
+
+def plot_pr_curve(px, py, ap, save_dir='pr_curve.png', names=()):
+ # Precision-recall curve
+ fig, ax = plt.subplots(1, 1, figsize=(9, 6), tight_layout=True)
+ py = np.stack(py, axis=1)
+
+ if 0 < len(names) < 21: # display per-class legend if < 21 classes
+ for i, y in enumerate(py.T):
+ ax.plot(px, y, linewidth=1, label=f'{names[i]} {ap[i, 0]:.3f}') # plot(recall, precision)
+ else:
+ ax.plot(px, py, linewidth=1, color='grey') # plot(recall, precision)
+
+ ax.plot(px, py.mean(1), linewidth=3, color='blue', label='all classes %.3f mAP@0.5' % ap[:, 0].mean())
+ ax.set_xlabel('Recall')
+ ax.set_ylabel('Precision')
+ ax.set_xlim(0, 1)
+ ax.set_ylim(0, 1)
+ plt.legend(bbox_to_anchor=(1.04, 1), loc="upper left")
+ fig.savefig(Path(save_dir), dpi=250)
+ plt.close()
+
+
+def plot_mc_curve(px, py, save_dir='mc_curve.png', names=(), xlabel='Confidence', ylabel='Metric'):
+ # Metric-confidence curve
+ fig, ax = plt.subplots(1, 1, figsize=(9, 6), tight_layout=True)
+
+ if 0 < len(names) < 21: # display per-class legend if < 21 classes
+ for i, y in enumerate(py):
+ ax.plot(px, y, linewidth=1, label=f'{names[i]}') # plot(confidence, metric)
+ else:
+ ax.plot(px, py.T, linewidth=1, color='grey') # plot(confidence, metric)
+
+ y = py.mean(0)
+ ax.plot(px, y, linewidth=3, color='blue', label=f'all classes {y.max():.2f} at {px[y.argmax()]:.3f}')
+ ax.set_xlabel(xlabel)
+ ax.set_ylabel(ylabel)
+ ax.set_xlim(0, 1)
+ ax.set_ylim(0, 1)
+ plt.legend(bbox_to_anchor=(1.04, 1), loc="upper left")
+ fig.savefig(Path(save_dir), dpi=250)
+ plt.close()
diff --git a/utils/plots.py b/utils/plots.py
new file mode 100644
index 00000000000..d8a561a71dc
--- /dev/null
+++ b/utils/plots.py
@@ -0,0 +1,437 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Plotting utils
+"""
+
+import math
+from copy import copy
+from pathlib import Path
+
+import cv2
+import matplotlib
+import matplotlib.pyplot as plt
+import numpy as np
+import pandas as pd
+import seaborn as sn
+import torch
+from PIL import Image, ImageDraw, ImageFont
+
+from utils.general import is_ascii, xyxy2xywh, xywh2xyxy
+from utils.metrics import fitness
+
+# Settings
+matplotlib.rc('font', **{'size': 11})
+matplotlib.use('Agg') # for writing to files only
+
+FILE = Path(__file__).absolute()
+ROOT = FILE.parents[1] # yolov5/ dir
+
+
+class Colors:
+ # Ultralytics color palette https://ultralytics.com/
+ def __init__(self):
+ # hex = matplotlib.colors.TABLEAU_COLORS.values()
+ hex = ('FF3838', 'FF9D97', 'FF701F', 'FFB21D', 'CFD231', '48F90A', '92CC17', '3DDB86', '1A9334', '00D4BB',
+ '2C99A8', '00C2FF', '344593', '6473FF', '0018EC', '8438FF', '520085', 'CB38FF', 'FF95C8', 'FF37C7')
+ self.palette = [self.hex2rgb('#' + c) for c in hex]
+ self.n = len(self.palette)
+
+ def __call__(self, i, bgr=False):
+ c = self.palette[int(i) % self.n]
+ return (c[2], c[1], c[0]) if bgr else c
+
+ @staticmethod
+ def hex2rgb(h): # rgb order (PIL)
+ return tuple(int(h[1 + i:1 + i + 2], 16) for i in (0, 2, 4))
+
+
+colors = Colors() # create instance for 'from utils.plots import colors'
+
+
+def check_font(font='Arial.ttf', size=10):
+ # Return a PIL TrueType Font, downloading to ROOT dir if necessary
+ font = Path(font)
+ font = font if font.exists() else (ROOT / font.name)
+ try:
+ return ImageFont.truetype(str(font) if font.exists() else font.name, size)
+ except Exception as e: # download if missing
+ url = "https://ultralytics.com/assets/" + font.name
+ print(f'Downloading {url} to {font}...')
+ torch.hub.download_url_to_file(url, str(font))
+ return ImageFont.truetype(str(font), size)
+
+
+class Annotator:
+ check_font() # download TTF if necessary
+
+ # YOLOv5 Annotator for train/val mosaics and jpgs and detect/hub inference annotations
+ def __init__(self, im, line_width=None, font_size=None, font='Arial.ttf', pil=True):
+ assert im.data.contiguous, 'Image not contiguous. Apply np.ascontiguousarray(im) to Annotator() input images.'
+ self.pil = pil
+ if self.pil: # use PIL
+ self.im = im if isinstance(im, Image.Image) else Image.fromarray(im)
+ self.draw = ImageDraw.Draw(self.im)
+ self.font = check_font(font, size=font_size or max(round(sum(self.im.size) / 2 * 0.035), 12))
+ self.fh = self.font.getsize('a')[1] - 3 # font height
+ else: # use cv2
+ self.im = im
+ self.lw = line_width or max(round(sum(im.shape) / 2 * 0.003), 2) # line width
+
+ def box_label(self, box, label='', color=(128, 128, 128), txt_color=(255, 255, 255)):
+ # Add one xyxy box to image with label
+ if self.pil or not is_ascii(label):
+ self.draw.rectangle(box, width=self.lw, outline=color) # box
+ if label:
+ w = self.font.getsize(label)[0] # text width
+ self.draw.rectangle([box[0], box[1] - self.fh, box[0] + w + 1, box[1] + 1], fill=color)
+ self.draw.text((box[0], box[1]), label, fill=txt_color, font=self.font, anchor='ls')
+ else: # cv2
+ c1, c2 = (int(box[0]), int(box[1])), (int(box[2]), int(box[3]))
+ cv2.rectangle(self.im, c1, c2, color, thickness=self.lw, lineType=cv2.LINE_AA)
+ if label:
+ tf = max(self.lw - 1, 1) # font thickness
+ w, h = cv2.getTextSize(label, 0, fontScale=self.lw / 3, thickness=tf)[0]
+ c2 = c1[0] + w, c1[1] - h - 3
+ cv2.rectangle(self.im, c1, c2, color, -1, cv2.LINE_AA) # filled
+ cv2.putText(self.im, label, (c1[0], c1[1] - 2), 0, self.lw / 3, txt_color, thickness=tf,
+ lineType=cv2.LINE_AA)
+
+ def rectangle(self, xy, fill=None, outline=None, width=1):
+ # Add rectangle to image (PIL-only)
+ self.draw.rectangle(xy, fill, outline, width)
+
+ def text(self, xy, text, txt_color=(255, 255, 255)):
+ # Add text to image (PIL-only)
+ w, h = self.font.getsize(text) # text width, height
+ self.draw.text((xy[0], xy[1] - h + 1), text, fill=txt_color, font=self.font)
+
+ def result(self):
+ # Return annotated image as array
+ return np.asarray(self.im)
+
+
+def hist2d(x, y, n=100):
+ # 2d histogram used in labels.png and evolve.png
+ xedges, yedges = np.linspace(x.min(), x.max(), n), np.linspace(y.min(), y.max(), n)
+ hist, xedges, yedges = np.histogram2d(x, y, (xedges, yedges))
+ xidx = np.clip(np.digitize(x, xedges) - 1, 0, hist.shape[0] - 1)
+ yidx = np.clip(np.digitize(y, yedges) - 1, 0, hist.shape[1] - 1)
+ return np.log(hist[xidx, yidx])
+
+
+def butter_lowpass_filtfilt(data, cutoff=1500, fs=50000, order=5):
+ from scipy.signal import butter, filtfilt
+
+ # https://stackoverflow.com/questions/28536191/how-to-filter-smooth-with-scipy-numpy
+ def butter_lowpass(cutoff, fs, order):
+ nyq = 0.5 * fs
+ normal_cutoff = cutoff / nyq
+ return butter(order, normal_cutoff, btype='low', analog=False)
+
+ b, a = butter_lowpass(cutoff, fs, order=order)
+ return filtfilt(b, a, data) # forward-backward filter
+
+
+def output_to_target(output):
+ # Convert model output to target format [batch_id, class_id, x, y, w, h, conf]
+ targets = []
+ for i, o in enumerate(output):
+ for *box, conf, cls in o.cpu().numpy():
+ targets.append([i, cls, *list(*xyxy2xywh(np.array(box)[None])), conf])
+ return np.array(targets)
+
+
+def plot_images(images, targets, paths=None, fname='images.jpg', names=None, max_size=1920, max_subplots=16):
+ # Plot image grid with labels
+ if isinstance(images, torch.Tensor):
+ images = images.cpu().float().numpy()
+ if isinstance(targets, torch.Tensor):
+ targets = targets.cpu().numpy()
+ if np.max(images[0]) <= 1:
+ images *= 255.0 # de-normalise (optional)
+ bs, _, h, w = images.shape # batch size, _, height, width
+ bs = min(bs, max_subplots) # limit plot images
+ ns = np.ceil(bs ** 0.5) # number of subplots (square)
+
+ # Build Image
+ mosaic = np.full((int(ns * h), int(ns * w), 3), 255, dtype=np.uint8) # init
+ for i, im in enumerate(images):
+ if i == max_subplots: # if last batch has fewer images than we expect
+ break
+ x, y = int(w * (i // ns)), int(h * (i % ns)) # block origin
+ im = im.transpose(1, 2, 0)
+ mosaic[y:y + h, x:x + w, :] = im
+
+ # Resize (optional)
+ scale = max_size / ns / max(h, w)
+ if scale < 1:
+ h = math.ceil(scale * h)
+ w = math.ceil(scale * w)
+ mosaic = cv2.resize(mosaic, tuple(int(x * ns) for x in (w, h)))
+
+ # Annotate
+ fs = int((h + w) * ns * 0.01) # font size
+ annotator = Annotator(mosaic, line_width=round(fs / 10), font_size=fs)
+ for i in range(i + 1):
+ x, y = int(w * (i // ns)), int(h * (i % ns)) # block origin
+ annotator.rectangle([x, y, x + w, y + h], None, (255, 255, 255), width=2) # borders
+ if paths:
+ annotator.text((x + 5, y + 5 + h), text=Path(paths[i]).name[:40], txt_color=(220, 220, 220)) # filenames
+ if len(targets) > 0:
+ ti = targets[targets[:, 0] == i] # image targets
+ boxes = xywh2xyxy(ti[:, 2:6]).T
+ classes = ti[:, 1].astype('int')
+ labels = ti.shape[1] == 6 # labels if no conf column
+ conf = None if labels else ti[:, 6] # check for confidence presence (label vs pred)
+
+ if boxes.shape[1]:
+ if boxes.max() <= 1.01: # if normalized with tolerance 0.01
+ boxes[[0, 2]] *= w # scale to pixels
+ boxes[[1, 3]] *= h
+ elif scale < 1: # absolute coords need scale if image scales
+ boxes *= scale
+ boxes[[0, 2]] += x
+ boxes[[1, 3]] += y
+ for j, box in enumerate(boxes.T.tolist()):
+ cls = classes[j]
+ color = colors(cls)
+ cls = names[cls] if names else cls
+ if labels or conf[j] > 0.25: # 0.25 conf thresh
+ label = f'{cls}' if labels else f'{cls} {conf[j]:.1f}'
+ annotator.box_label(box, label, color=color)
+ annotator.im.save(fname) # save
+
+
+def plot_lr_scheduler(optimizer, scheduler, epochs=300, save_dir=''):
+ # Plot LR simulating training for full epochs
+ optimizer, scheduler = copy(optimizer), copy(scheduler) # do not modify originals
+ y = []
+ for _ in range(epochs):
+ scheduler.step()
+ y.append(optimizer.param_groups[0]['lr'])
+ plt.plot(y, '.-', label='LR')
+ plt.xlabel('epoch')
+ plt.ylabel('LR')
+ plt.grid()
+ plt.xlim(0, epochs)
+ plt.ylim(0)
+ plt.savefig(Path(save_dir) / 'LR.png', dpi=200)
+ plt.close()
+
+
+def plot_val_txt(): # from utils.plots import *; plot_val()
+ # Plot val.txt histograms
+ x = np.loadtxt('val.txt', dtype=np.float32)
+ box = xyxy2xywh(x[:, :4])
+ cx, cy = box[:, 0], box[:, 1]
+
+ fig, ax = plt.subplots(1, 1, figsize=(6, 6), tight_layout=True)
+ ax.hist2d(cx, cy, bins=600, cmax=10, cmin=0)
+ ax.set_aspect('equal')
+ plt.savefig('hist2d.png', dpi=300)
+
+ fig, ax = plt.subplots(1, 2, figsize=(12, 6), tight_layout=True)
+ ax[0].hist(cx, bins=600)
+ ax[1].hist(cy, bins=600)
+ plt.savefig('hist1d.png', dpi=200)
+
+
+def plot_targets_txt(): # from utils.plots import *; plot_targets_txt()
+ # Plot targets.txt histograms
+ x = np.loadtxt('targets.txt', dtype=np.float32).T
+ s = ['x targets', 'y targets', 'width targets', 'height targets']
+ fig, ax = plt.subplots(2, 2, figsize=(8, 8), tight_layout=True)
+ ax = ax.ravel()
+ for i in range(4):
+ ax[i].hist(x[i], bins=100, label='%.3g +/- %.3g' % (x[i].mean(), x[i].std()))
+ ax[i].legend()
+ ax[i].set_title(s[i])
+ plt.savefig('targets.jpg', dpi=200)
+
+
+def plot_study_txt(path='', x=None): # from utils.plots import *; plot_study_txt()
+ # Plot study.txt generated by val.py
+ plot2 = False # plot additional results
+ if plot2:
+ ax = plt.subplots(2, 4, figsize=(10, 6), tight_layout=True)[1].ravel()
+
+ fig2, ax2 = plt.subplots(1, 1, figsize=(8, 4), tight_layout=True)
+ # for f in [Path(path) / f'study_coco_{x}.txt' for x in ['yolov5s6', 'yolov5m6', 'yolov5l6', 'yolov5x6']]:
+ for f in sorted(Path(path).glob('study*.txt')):
+ y = np.loadtxt(f, dtype=np.float32, usecols=[0, 1, 2, 3, 7, 8, 9], ndmin=2).T
+ x = np.arange(y.shape[1]) if x is None else np.array(x)
+ if plot2:
+ s = ['P', 'R', 'mAP@.5', 'mAP@.5:.95', 't_preprocess (ms/img)', 't_inference (ms/img)', 't_NMS (ms/img)']
+ for i in range(7):
+ ax[i].plot(x, y[i], '.-', linewidth=2, markersize=8)
+ ax[i].set_title(s[i])
+
+ j = y[3].argmax() + 1
+ ax2.plot(y[5, 1:j], y[3, 1:j] * 1E2, '.-', linewidth=2, markersize=8,
+ label=f.stem.replace('study_coco_', '').replace('yolo', 'YOLO'))
+
+ ax2.plot(1E3 / np.array([209, 140, 97, 58, 35, 18]), [34.6, 40.5, 43.0, 47.5, 49.7, 51.5],
+ 'k.-', linewidth=2, markersize=8, alpha=.25, label='EfficientDet')
+
+ ax2.grid(alpha=0.2)
+ ax2.set_yticks(np.arange(20, 60, 5))
+ ax2.set_xlim(0, 57)
+ ax2.set_ylim(30, 55)
+ ax2.set_xlabel('GPU Speed (ms/img)')
+ ax2.set_ylabel('COCO AP val')
+ ax2.legend(loc='lower right')
+ plt.savefig(str(Path(path).name) + '.png', dpi=300)
+
+
+def plot_labels(labels, names=(), save_dir=Path('')):
+ # plot dataset labels
+ print('Plotting labels... ')
+ c, b = labels[:, 0], labels[:, 1:].transpose() # classes, boxes
+ nc = int(c.max() + 1) # number of classes
+ x = pd.DataFrame(b.transpose(), columns=['x', 'y', 'width', 'height'])
+
+ # seaborn correlogram
+ sn.pairplot(x, corner=True, diag_kind='auto', kind='hist', diag_kws=dict(bins=50), plot_kws=dict(pmax=0.9))
+ plt.savefig(save_dir / 'labels_correlogram.jpg', dpi=200)
+ plt.close()
+
+ # matplotlib labels
+ matplotlib.use('svg') # faster
+ ax = plt.subplots(2, 2, figsize=(8, 8), tight_layout=True)[1].ravel()
+ y = ax[0].hist(c, bins=np.linspace(0, nc, nc + 1) - 0.5, rwidth=0.8)
+ # [y[2].patches[i].set_color([x / 255 for x in colors(i)]) for i in range(nc)] # update colors bug #3195
+ ax[0].set_ylabel('instances')
+ if 0 < len(names) < 30:
+ ax[0].set_xticks(range(len(names)))
+ ax[0].set_xticklabels(names, rotation=90, fontsize=10)
+ else:
+ ax[0].set_xlabel('classes')
+ sn.histplot(x, x='x', y='y', ax=ax[2], bins=50, pmax=0.9)
+ sn.histplot(x, x='width', y='height', ax=ax[3], bins=50, pmax=0.9)
+
+ # rectangles
+ labels[:, 1:3] = 0.5 # center
+ labels[:, 1:] = xywh2xyxy(labels[:, 1:]) * 2000
+ img = Image.fromarray(np.ones((2000, 2000, 3), dtype=np.uint8) * 255)
+ for cls, *box in labels[:1000]:
+ ImageDraw.Draw(img).rectangle(box, width=1, outline=colors(cls)) # plot
+ ax[1].imshow(img)
+ ax[1].axis('off')
+
+ for a in [0, 1, 2, 3]:
+ for s in ['top', 'right', 'left', 'bottom']:
+ ax[a].spines[s].set_visible(False)
+
+ plt.savefig(save_dir / 'labels.jpg', dpi=200)
+ matplotlib.use('Agg')
+ plt.close()
+
+
+def profile_idetection(start=0, stop=0, labels=(), save_dir=''):
+ # Plot iDetection '*.txt' per-image logs. from utils.plots import *; profile_idetection()
+ ax = plt.subplots(2, 4, figsize=(12, 6), tight_layout=True)[1].ravel()
+ s = ['Images', 'Free Storage (GB)', 'RAM Usage (GB)', 'Battery', 'dt_raw (ms)', 'dt_smooth (ms)', 'real-world FPS']
+ files = list(Path(save_dir).glob('frames*.txt'))
+ for fi, f in enumerate(files):
+ try:
+ results = np.loadtxt(f, ndmin=2).T[:, 90:-30] # clip first and last rows
+ n = results.shape[1] # number of rows
+ x = np.arange(start, min(stop, n) if stop else n)
+ results = results[:, x]
+ t = (results[0] - results[0].min()) # set t0=0s
+ results[0] = x
+ for i, a in enumerate(ax):
+ if i < len(results):
+ label = labels[fi] if len(labels) else f.stem.replace('frames_', '')
+ a.plot(t, results[i], marker='.', label=label, linewidth=1, markersize=5)
+ a.set_title(s[i])
+ a.set_xlabel('time (s)')
+ # if fi == len(files) - 1:
+ # a.set_ylim(bottom=0)
+ for side in ['top', 'right']:
+ a.spines[side].set_visible(False)
+ else:
+ a.remove()
+ except Exception as e:
+ print('Warning: Plotting error for %s; %s' % (f, e))
+ ax[1].legend()
+ plt.savefig(Path(save_dir) / 'idetection_profile.png', dpi=200)
+
+
+def plot_evolve(evolve_csv='path/to/evolve.csv'): # from utils.plots import *; plot_evolve()
+ # Plot evolve.csv hyp evolution results
+ evolve_csv = Path(evolve_csv)
+ data = pd.read_csv(evolve_csv)
+ keys = [x.strip() for x in data.columns]
+ x = data.values
+ f = fitness(x)
+ j = np.argmax(f) # max fitness index
+ plt.figure(figsize=(10, 12), tight_layout=True)
+ matplotlib.rc('font', **{'size': 8})
+ for i, k in enumerate(keys[7:]):
+ v = x[:, 7 + i]
+ mu = v[j] # best single result
+ plt.subplot(6, 5, i + 1)
+ plt.scatter(v, f, c=hist2d(v, f, 20), cmap='viridis', alpha=.8, edgecolors='none')
+ plt.plot(mu, f.max(), 'k+', markersize=15)
+ plt.title('%s = %.3g' % (k, mu), fontdict={'size': 9}) # limit to 40 characters
+ if i % 5 != 0:
+ plt.yticks([])
+ print('%15s: %.3g' % (k, mu))
+ f = evolve_csv.with_suffix('.png') # filename
+ plt.savefig(f, dpi=200)
+ plt.close()
+ print(f'Saved {f}')
+
+
+def plot_results(file='path/to/results.csv', dir=''):
+ # Plot training results.csv. Usage: from utils.plots import *; plot_results('path/to/results.csv')
+ save_dir = Path(file).parent if file else Path(dir)
+ fig, ax = plt.subplots(2, 5, figsize=(12, 6), tight_layout=True)
+ ax = ax.ravel()
+ files = list(save_dir.glob('results*.csv'))
+ assert len(files), f'No results.csv files found in {save_dir.resolve()}, nothing to plot.'
+ for fi, f in enumerate(files):
+ try:
+ data = pd.read_csv(f)
+ s = [x.strip() for x in data.columns]
+ x = data.values[:, 0]
+ for i, j in enumerate([1, 2, 3, 4, 5, 8, 9, 10, 6, 7]):
+ y = data.values[:, j]
+ # y[y == 0] = np.nan # don't show zero values
+ ax[i].plot(x, y, marker='.', label=f.stem, linewidth=2, markersize=8)
+ ax[i].set_title(s[j], fontsize=12)
+ # if j in [8, 9, 10]: # share train and val loss y axes
+ # ax[i].get_shared_y_axes().join(ax[i], ax[i - 5])
+ except Exception as e:
+ print(f'Warning: Plotting error for {f}: {e}')
+ ax[1].legend()
+ fig.savefig(save_dir / 'results.png', dpi=200)
+ plt.close()
+
+
+def feature_visualization(x, module_type, stage, n=32, save_dir=Path('runs/detect/exp')):
+ """
+ x: Features to be visualized
+ module_type: Module type
+ stage: Module stage within model
+ n: Maximum number of feature maps to plot
+ save_dir: Directory to save results
+ """
+ if 'Detect' not in module_type:
+ batch, channels, height, width = x.shape # batch, channels, height, width
+ if height > 1 and width > 1:
+ f = f"stage{stage}_{module_type.split('.')[-1]}_features.png" # filename
+
+ blocks = torch.chunk(x[0].cpu(), channels, dim=0) # select batch index 0, block by channels
+ n = min(n, channels) # number of plots
+ fig, ax = plt.subplots(math.ceil(n / 8), 8, tight_layout=True) # 8 rows x n/8 cols
+ ax = ax.ravel()
+ plt.subplots_adjust(wspace=0.05, hspace=0.05)
+ for i in range(n):
+ ax[i].imshow(blocks[i].squeeze()) # cmap='gray'
+ ax[i].axis('off')
+
+ print(f'Saving {save_dir / f}... ({n}/{channels})')
+ plt.savefig(save_dir / f, dpi=300, bbox_inches='tight')
+ plt.close()
diff --git a/utils/torch_utils.py b/utils/torch_utils.py
index 25eff07f3f4..2e153921eb1 100644
--- a/utils/torch_utils.py
+++ b/utils/torch_utils.py
@@ -1,66 +1,168 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+PyTorch utils
+"""
+
+import datetime
import logging
+import math
import os
+import platform
+import subprocess
import time
+from contextlib import contextmanager
from copy import deepcopy
+from pathlib import Path
-import math
import torch
import torch.backends.cudnn as cudnn
+import torch.distributed as dist
import torch.nn as nn
import torch.nn.functional as F
import torchvision
-logger = logging.getLogger(__name__)
+try:
+ import thop # for FLOPs computation
+except ImportError:
+ thop = None
+LOGGER = logging.getLogger(__name__)
-def init_torch_seeds(seed=0):
- torch.manual_seed(seed)
+@contextmanager
+def torch_distributed_zero_first(local_rank: int):
+ """
+ Decorator to make all processes in distributed training wait for each local_master to do something.
+ """
+ if local_rank not in [-1, 0]:
+ dist.barrier(device_ids=[local_rank])
+ yield
+ if local_rank == 0:
+ dist.barrier(device_ids=[0])
+
+
+def init_torch_seeds(seed=0):
# Speed-reproducibility tradeoff https://pytorch.org/docs/stable/notes/randomness.html
+ torch.manual_seed(seed)
if seed == 0: # slower, more reproducible
- cudnn.deterministic = True
- cudnn.benchmark = False
+ cudnn.benchmark, cudnn.deterministic = False, True
else: # faster, less reproducible
- cudnn.deterministic = False
- cudnn.benchmark = True
+ cudnn.benchmark, cudnn.deterministic = True, False
+
+
+def date_modified(path=__file__):
+ # return human-readable file modification date, i.e. '2021-3-26'
+ t = datetime.datetime.fromtimestamp(Path(path).stat().st_mtime)
+ return f'{t.year}-{t.month}-{t.day}'
+
+
+def git_describe(path=Path(__file__).parent): # path must be a directory
+ # return human-readable git description, i.e. v5.0-5-g3e25f1e https://git-scm.com/docs/git-describe
+ s = f'git -C {path} describe --tags --long --always'
+ try:
+ return subprocess.check_output(s, shell=True, stderr=subprocess.STDOUT).decode()[:-1]
+ except subprocess.CalledProcessError as e:
+ return '' # not a git repository
def select_device(device='', batch_size=None):
# device = 'cpu' or '0' or '0,1,2,3'
- cpu_request = device.lower() == 'cpu'
- if device and not cpu_request: # if device requested other than 'cpu'
+ s = f'YOLOv5 🚀 {git_describe() or date_modified()} torch {torch.__version__} ' # string
+ device = str(device).strip().lower().replace('cuda:', '') # to string, 'cuda:0' to '0'
+ cpu = device == 'cpu'
+ if cpu:
+ os.environ['CUDA_VISIBLE_DEVICES'] = '-1' # force torch.cuda.is_available() = False
+ elif device: # non-cpu device requested
os.environ['CUDA_VISIBLE_DEVICES'] = device # set environment variable
- assert torch.cuda.is_available(), 'CUDA unavailable, invalid device %s requested' % device # check availablity
+ assert torch.cuda.is_available(), f'CUDA unavailable, invalid device {device} requested' # check availability
- cuda = False if cpu_request else torch.cuda.is_available()
+ cuda = not cpu and torch.cuda.is_available()
if cuda:
- c = 1024 ** 2 # bytes to MB
- ng = torch.cuda.device_count()
- if ng > 1 and batch_size: # check that batch_size is compatible with device_count
- assert batch_size % ng == 0, 'batch-size %g not multiple of GPU count %g' % (batch_size, ng)
- x = [torch.cuda.get_device_properties(i) for i in range(ng)]
- s = 'Using CUDA '
- for i in range(0, ng):
- if i == 1:
- s = ' ' * len(s)
- logger.info("%sdevice%g _CudaDeviceProperties(name='%s', total_memory=%dMB)" %
- (s, i, x[i].name, x[i].total_memory / c))
+ devices = device.split(',') if device else '0' # range(torch.cuda.device_count()) # i.e. 0,1,6,7
+ n = len(devices) # device count
+ if n > 1 and batch_size: # check batch_size is divisible by device_count
+ assert batch_size % n == 0, f'batch-size {batch_size} not multiple of GPU count {n}'
+ space = ' ' * (len(s) + 1)
+ for i, d in enumerate(devices):
+ p = torch.cuda.get_device_properties(i)
+ s += f"{'' if i == 0 else space}CUDA:{d} ({p.name}, {p.total_memory / 1024 ** 2}MB)\n" # bytes to MB
else:
- logger.info('Using CPU')
+ s += 'CPU\n'
- logger.info('') # skip a line
+ LOGGER.info(s.encode().decode('ascii', 'ignore') if platform.system() == 'Windows' else s) # emoji-safe
return torch.device('cuda:0' if cuda else 'cpu')
-def time_synchronized():
- torch.cuda.synchronize() if torch.cuda.is_available() else None
+def time_sync():
+ # pytorch-accurate time
+ if torch.cuda.is_available():
+ torch.cuda.synchronize()
return time.time()
+def profile(input, ops, n=10, device=None):
+ # YOLOv5 speed/memory/FLOPs profiler
+ #
+ # Usage:
+ # input = torch.randn(16, 3, 640, 640)
+ # m1 = lambda x: x * torch.sigmoid(x)
+ # m2 = nn.SiLU()
+ # profile(input, [m1, m2], n=100) # profile over 100 iterations
+
+ results = []
+ logging.basicConfig(format="%(message)s", level=logging.INFO)
+ device = device or select_device()
+ print(f"{'Params':>12s}{'GFLOPs':>12s}{'GPU_mem (GB)':>14s}{'forward (ms)':>14s}{'backward (ms)':>14s}"
+ f"{'input':>24s}{'output':>24s}")
+
+ for x in input if isinstance(input, list) else [input]:
+ x = x.to(device)
+ x.requires_grad = True
+ for m in ops if isinstance(ops, list) else [ops]:
+ m = m.to(device) if hasattr(m, 'to') else m # device
+ m = m.half() if hasattr(m, 'half') and isinstance(x, torch.Tensor) and x.dtype is torch.float16 else m
+ tf, tb, t = 0., 0., [0., 0., 0.] # dt forward, backward
+ try:
+ flops = thop.profile(m, inputs=(x,), verbose=False)[0] / 1E9 * 2 # GFLOPs
+ except:
+ flops = 0
+
+ try:
+ for _ in range(n):
+ t[0] = time_sync()
+ y = m(x)
+ t[1] = time_sync()
+ try:
+ _ = (sum([yi.sum() for yi in y]) if isinstance(y, list) else y).sum().backward()
+ t[2] = time_sync()
+ except Exception as e: # no backward method
+ print(e)
+ t[2] = float('nan')
+ tf += (t[1] - t[0]) * 1000 / n # ms per op forward
+ tb += (t[2] - t[1]) * 1000 / n # ms per op backward
+ mem = torch.cuda.memory_reserved() / 1E9 if torch.cuda.is_available() else 0 # (GB)
+ s_in = tuple(x.shape) if isinstance(x, torch.Tensor) else 'list'
+ s_out = tuple(y.shape) if isinstance(y, torch.Tensor) else 'list'
+ p = sum(list(x.numel() for x in m.parameters())) if isinstance(m, nn.Module) else 0 # parameters
+ print(f'{p:12}{flops:12.4g}{mem:>14.3f}{tf:14.4g}{tb:14.4g}{str(s_in):>24s}{str(s_out):>24s}')
+ results.append([p, flops, mem, tf, tb, s_in, s_out])
+ except Exception as e:
+ print(e)
+ results.append(None)
+ torch.cuda.empty_cache()
+ return results
+
+
def is_parallel(model):
+ # Returns True if model is of type DP or DDP
return type(model) in (nn.parallel.DataParallel, nn.parallel.DistributedDataParallel)
+def de_parallel(model):
+ # De-parallelize a model: returns single-GPU model if model is of type DP or DDP
+ return model.module if is_parallel(model) else model
+
+
def intersect_dicts(da, db, exclude=()):
# Dictionary intersection of matching keys and shapes, omitting 'exclude' keys, using da values
return {k: v for k, v in da.items() if k in db and not any(x in k for x in exclude) and v.shape == db[k].shape}
@@ -105,8 +207,6 @@ def prune(model, amount=0.3):
def fuse_conv_and_bn(conv, bn):
# Fuse convolution and batchnorm layers https://tehnokv.com/posts/fusing-batchnorm-and-conv/
-
- # init
fusedconv = nn.Conv2d(conv.in_channels,
conv.out_channels,
kernel_size=conv.kernel_size,
@@ -118,7 +218,7 @@ def fuse_conv_and_bn(conv, bn):
# prepare filters
w_conv = conv.weight.clone().view(conv.out_channels, -1)
w_bn = torch.diag(bn.weight.div(torch.sqrt(bn.eps + bn.running_var)))
- fusedconv.weight.copy_(torch.mm(w_bn, w_conv).view(fusedconv.weight.size()))
+ fusedconv.weight.copy_(torch.mm(w_bn, w_conv).view(fusedconv.weight.shape))
# prepare spatial bias
b_conv = torch.zeros(conv.weight.size(0), device=conv.weight.device) if conv.bias is None else conv.bias
@@ -128,8 +228,8 @@ def fuse_conv_and_bn(conv, bn):
return fusedconv
-def model_info(model, verbose=False):
- # Plots a line-by-line description of a PyTorch model
+def model_info(model, verbose=False, img_size=640):
+ # Model information. img_size may be int or list, i.e. img_size=640 or img_size=[640, 320]
n_p = sum(x.numel() for x in model.parameters()) # number parameters
n_g = sum(x.numel() for x in model.parameters() if x.requires_grad) # number gradients
if verbose:
@@ -139,15 +239,17 @@ def model_info(model, verbose=False):
print('%5g %40s %9s %12g %20s %10.3g %10.3g' %
(i, name, p.requires_grad, p.numel(), list(p.shape), p.mean(), p.std()))
- try: # FLOPS
+ try: # FLOPs
from thop import profile
- flops = profile(deepcopy(model), inputs=(torch.zeros(1, 3, 64, 64),), verbose=False)[0] / 1E9 * 2
- fs = ', %.1f GFLOPS' % (flops * 100) # 640x640 FLOPS
- except:
+ stride = max(int(model.stride.max()), 32) if hasattr(model, 'stride') else 32
+ img = torch.zeros((1, model.yaml.get('ch', 3), stride, stride), device=next(model.parameters()).device) # input
+ flops = profile(deepcopy(model), inputs=(img,), verbose=False)[0] / 1E9 * 2 # stride GFLOPs
+ img_size = img_size if isinstance(img_size, list) else [img_size, img_size] # expand if int/float
+ fs = ', %.1f GFLOPs' % (flops * img_size[0] / stride * img_size[1] / stride) # 640x640 GFLOPs
+ except (ImportError, Exception):
fs = ''
- logger.info(
- 'Model Summary: %g layers, %g parameters, %g gradients%s' % (len(list(model.parameters())), n_p, n_g, fs))
+ LOGGER.info(f"Model Summary: {len(list(model.modules()))} layers, {n_p} parameters, {n_g} gradients{fs}")
def load_classifier(name='resnet101', n=2):
@@ -169,8 +271,8 @@ def load_classifier(name='resnet101', n=2):
return model
-def scale_img(img, ratio=1.0, same_shape=False): # img(16,3,256,416), r=ratio
- # scales img(bs,3,y,x) by ratio
+def scale_img(img, ratio=1.0, same_shape=False, gs=32): # img(16,3,256,416)
+ # scales img(bs,3,y,x) by ratio constrained to gs-multiple
if ratio == 1.0:
return img
else:
@@ -178,7 +280,6 @@ def scale_img(img, ratio=1.0, same_shape=False): # img(16,3,256,416), r=ratio
s = (int(h * ratio), int(w * ratio)) # new size
img = F.interpolate(img, size=s, mode='bilinear', align_corners=False) # resize
if not same_shape: # pad/crop img
- gs = 32 # (pixels) grid size
h, w = [math.ceil(x * ratio / gs) * gs for x in (h, w)]
return F.pad(img, [0, w - s[1], 0, h - s[0]], value=0.447) # value = imagenet mean
@@ -192,6 +293,23 @@ def copy_attr(a, b, include=(), exclude=()):
setattr(a, k, v)
+class EarlyStopping:
+ # YOLOv5 simple early stopper
+ def __init__(self, patience=30):
+ self.best_fitness = 0.0 # i.e. mAP
+ self.best_epoch = 0
+ self.patience = patience # epochs to wait after fitness stops improving to stop
+
+ def __call__(self, epoch, fitness):
+ if fitness >= self.best_fitness: # >= 0 to allow for early zero-fitness stage of training
+ self.best_epoch = epoch
+ self.best_fitness = fitness
+ stop = (epoch - self.best_epoch) >= self.patience # stop training if patience exceeded
+ if stop:
+ LOGGER.info(f'EarlyStopping patience {self.patience} exceeded, stopping training.')
+ return stop
+
+
class ModelEMA:
""" Model Exponential Moving Average from https://github.com/rwightman/pytorch-image-models
Keep a moving average of everything in the model state_dict (parameters and buffers).
diff --git a/val.py b/val.py
new file mode 100644
index 00000000000..d521fe76638
--- /dev/null
+++ b/val.py
@@ -0,0 +1,405 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Validate a trained YOLOv5 model accuracy on a custom dataset
+
+Usage:
+ $ python path/to/val.py --data coco128.yaml --weights yolov5s.pt --img 640
+"""
+
+import argparse
+import json
+import os
+import sys
+from pathlib import Path
+from threading import Thread
+
+import numpy as np
+import torch
+from tqdm import tqdm
+
+FILE = Path(__file__).absolute()
+sys.path.append(FILE.parents[0].as_posix()) # add yolov5/ to path
+
+from models.experimental import attempt_load
+from utils.datasets import create_dataloader
+from utils.general import coco80_to_coco91_class, check_dataset, check_file, check_img_size, check_requirements, \
+ box_iou, non_max_suppression, scale_coords, xyxy2xywh, xywh2xyxy, set_logging, increment_path, colorstr
+from utils.metrics import ap_per_class, ConfusionMatrix
+from utils.plots import plot_images, output_to_target, plot_study_txt
+from utils.torch_utils import select_device, time_sync
+from utils.callbacks import Callbacks
+
+from aisa_utils.dl_utils.utils import plot_object_count_difference_ridgeline, make_video_results
+
+
+def save_one_txt(predn, save_conf, shape, file):
+ # Save one txt result
+ gn = torch.tensor(shape)[[1, 0, 1, 0]] # normalization gain whwh
+ for *xyxy, conf, cls in predn.tolist():
+ xywh = (xyxy2xywh(torch.tensor(xyxy).view(1, 4)) / gn).view(-1).tolist() # normalized xywh
+ line = (cls, *xywh, conf) if save_conf else (cls, *xywh) # label format
+ with open(file, 'a') as f:
+ f.write(('%g ' * len(line)).rstrip() % line + '\n')
+
+
+def save_one_json(predn, jdict, path, class_map):
+ # Save one JSON result {"image_id": 42, "category_id": 18, "bbox": [258.15, 41.29, 348.26, 243.78], "score": 0.236}
+ image_id = int(path.stem) if path.stem.isnumeric() else path.stem
+ box = xyxy2xywh(predn[:, :4]) # xywh
+ box[:, :2] -= box[:, 2:] / 2 # xy center to top-left corner
+ for p, b in zip(predn.tolist(), box.tolist()):
+ jdict.append({'image_id': image_id,
+ 'category_id': class_map[int(p[5])],
+ 'bbox': [round(x, 3) for x in b],
+ 'score': round(p[4], 5)})
+
+
+def process_batch(detections, labels, iouv):
+ """
+ Return correct predictions matrix. Both sets of boxes are in (x1, y1, x2, y2) format.
+ Arguments:
+ detections (Array[N, 6]), x1, y1, x2, y2, conf, class
+ labels (Array[M, 5]), class, x1, y1, x2, y2
+ Returns:
+ correct (Array[N, 10]), for 10 IoU levels
+ """
+ correct = torch.zeros(detections.shape[0], iouv.shape[0], dtype=torch.bool, device=iouv.device)
+ iou = box_iou(labels[:, 1:], detections[:, :4])
+ x = torch.where((iou >= iouv[0]) & (labels[:, 0:1] == detections[:, 5])) # IoU above threshold and classes match
+ if x[0].shape[0]:
+ matches = torch.cat((torch.stack(x, 1), iou[x[0], x[1]][:, None]), 1).cpu().numpy() # [label, detection, iou]
+ if x[0].shape[0] > 1:
+ matches = matches[matches[:, 2].argsort()[::-1]]
+ matches = matches[np.unique(matches[:, 1], return_index=True)[1]]
+ # matches = matches[matches[:, 2].argsort()[::-1]]
+ matches = matches[np.unique(matches[:, 0], return_index=True)[1]]
+ matches = torch.Tensor(matches).to(iouv.device)
+ correct[matches[:, 1].long()] = matches[:, 2:3] >= iouv
+ return correct
+
+
+@torch.no_grad()
+def run(data,
+ weights=None, # model.pt path(s)
+ batch_size=32, # batch size
+ imgsz=640, # inference size (pixels)
+ conf_thres=0.001, # confidence threshold
+ iou_thres=0.6, # NMS IoU threshold
+ task='val', # train, val, test, speed or study
+ device='', # cuda device, i.e. 0 or 0,1,2,3 or cpu
+ single_cls=False, # treat as single-class dataset
+ augment=False, # augmented inference
+ verbose=False, # verbose output
+ save_txt=False, # save results to *.txt
+ save_hybrid=False, # save label+prediction hybrid results to *.txt
+ save_conf=False, # save confidences in --save-txt labels
+ save_json=False, # save a COCO-JSON results file
+ project='runs/val', # save to project/name
+ name='exp', # save to project/name
+ exist_ok=False, # existing project/name ok, do not increment
+ half=True, # use FP16 half-precision inference
+ model=None,
+ dataloader=None,
+ save_dir=Path(''),
+ plots=True,
+ callbacks=Callbacks(),
+ compute_loss=None,
+ run_aisa_plots=False
+ ):
+ # Initialize/load model and set device
+ training = model is not None
+ if training: # called by train.py
+ device = next(model.parameters()).device # get model device
+
+ else: # called directly
+ device = select_device(device, batch_size=batch_size)
+
+ # Directories
+ save_dir = increment_path(Path(project) / name, exist_ok=exist_ok) # increment run
+ (save_dir / 'labels' if save_txt else save_dir).mkdir(parents=True, exist_ok=True) # make dir
+
+ # Load model
+ model = attempt_load(weights, map_location=device) # load FP32 model
+ gs = max(int(model.stride.max()), 32) # grid size (max stride)
+ imgsz = check_img_size(imgsz, s=gs) # check image size
+
+ # Multi-GPU disabled, incompatible with .half() https://github.com/ultralytics/yolov5/issues/99
+ # if device.type != 'cpu' and torch.cuda.device_count() > 1:
+ # model = nn.DataParallel(model)
+
+ # Data
+ data = check_dataset(data) # check
+
+ # Half
+ half &= device.type != 'cpu' # half precision only supported on CUDA
+ if half:
+ model.half()
+
+ # Configure
+ model.eval()
+ is_coco = isinstance(data.get('val'), str) and data['val'].endswith('coco/val2017.txt') # COCO dataset
+ nc = 1 if single_cls else int(data['nc']) # number of classes
+ iouv = torch.linspace(0.5, 0.95, 10).to(device) # iou vector for mAP@0.5:0.95
+ niou = iouv.numel()
+
+ # Dataloader
+ if not training:
+ if device.type != 'cpu':
+ model(torch.zeros(1, 3, imgsz, imgsz).to(device).type_as(next(model.parameters()))) # run once
+ task = task if task in ('train', 'val', 'test') else 'val' # path to train/val/test images
+ dataloader = create_dataloader(data[task], imgsz, batch_size, gs, single_cls, pad=0.5, rect=True,
+ prefix=colorstr(f'{task}: '))[0]
+
+ seen = 0
+ confusion_matrix = ConfusionMatrix(nc=nc)
+ names = {k: v for k, v in enumerate(model.names if hasattr(model, 'names') else model.module.names)}
+ class_map = coco80_to_coco91_class() if is_coco else list(range(1000))
+ s = ('%20s' + '%11s' * 6) % ('Class', 'Images', 'Labels', 'P', 'R', 'mAP@.5', 'mAP@.5:.95')
+ p, r, f1, mp, mr, map50, map, t0, t1, t2 = 0., 0., 0., 0., 0., 0., 0., 0., 0., 0.
+ loss = torch.zeros(3, device=device)
+ jdict, stats, ap, ap_class = [], [], [], []
+ extra_metrics = [0.0, 0.0]
+ extra_plots = []
+ ground_truths_extra = []
+ preds_extra = []
+ for batch_i, (img, targets, paths, shapes) in enumerate(tqdm(dataloader, desc=s)):
+ t_ = time_sync()
+ img = img.to(device, non_blocking=True)
+ img = img.half() if half else img.float() # uint8 to fp16/32
+ img /= 255.0 # 0 - 255 to 0.0 - 1.0
+ targets = targets.to(device)
+ nb, _, height, width = img.shape # batch size, channels, height, width
+ t = time_sync()
+ t0 += t - t_
+
+ # Run model
+ out, train_out = model(img, augment=augment) # inference and training outputs
+ t1 += time_sync() - t
+
+ # Compute loss
+ if compute_loss:
+ loss += compute_loss([x.float() for x in train_out], targets)[1] # box, obj, cls
+
+ # Run NMS
+ targets[:, 2:] *= torch.Tensor([width, height, width, height]).to(device) # to pixels
+ lb = [targets[targets[:, 0] == i, 1:] for i in range(nb)] if save_hybrid else [] # for autolabelling
+ t = time_sync()
+ out = non_max_suppression(out, conf_thres, iou_thres, labels=lb, multi_label=True, agnostic=single_cls)
+
+ t2 += time_sync() - t
+
+ # Statistics per image
+ for si, pred in enumerate(out):
+ labels = targets[targets[:, 0] == si, 1:]
+ nl = len(labels)
+ preds_extra += [pred.cpu().numpy()]
+ ground_truths_extra += [[1]*nl]
+ output_predictions = pred[:, 4].cpu().numpy()
+ extra_metrics[0] += np.abs(nl - len(np.where(output_predictions>=0.3)[0]))
+ extra_metrics[1] += np.abs(nl - len(np.where(output_predictions>=0.5)[0]))
+ tcls = labels[:, 0].tolist() if nl else [] # target class
+ path, shape = Path(paths[si]), shapes[si][0]
+ seen += 1
+
+ if len(pred) == 0:
+ if nl:
+ stats.append((torch.zeros(0, niou, dtype=torch.bool), torch.Tensor(), torch.Tensor(), tcls))
+ continue
+
+ # Predictions
+ if single_cls:
+ pred[:, 5] = 0
+ predn = pred.clone()
+ scale_coords(img[si].shape[1:], predn[:, :4], shape, shapes[si][1]) # native-space pred
+
+ # Evaluate
+ if nl:
+ tbox = xywh2xyxy(labels[:, 1:5]) # target boxes
+ scale_coords(img[si].shape[1:], tbox, shape, shapes[si][1]) # native-space labels
+ labelsn = torch.cat((labels[:, 0:1], tbox), 1) # native-space labels
+ correct = process_batch(predn, labelsn, iouv)
+ if plots:
+ confusion_matrix.process_batch(predn, labelsn)
+ else:
+ correct = torch.zeros(pred.shape[0], niou, dtype=torch.bool)
+ stats.append((correct.cpu(), pred[:, 4].cpu(), pred[:, 5].cpu(), tcls)) # (correct, conf, pcls, tcls)
+
+ # Save/log
+ if save_txt:
+ save_one_txt(predn, save_conf, shape, file=save_dir / 'labels' / (path.stem + '.txt'))
+ if save_json:
+ save_one_json(predn, jdict, path, class_map) # append to COCO-JSON dictionary
+ callbacks.on_val_image_end(pred, predn, path, names, img[si])
+
+ # Plot images
+ if plots and batch_i < 3:
+ f = save_dir / f'val_batch{batch_i}_labels.jpg' # labels
+ Thread(target=plot_images, args=(img, targets, paths, f, names), daemon=True).start()
+ f = save_dir / f'val_batch{batch_i}_pred.jpg' # predictions
+ Thread(target=plot_images, args=(img, output_to_target(out), paths, f, names), daemon=True).start()
+
+ # Compute statistics
+ stats = [np.concatenate(x, 0) for x in zip(*stats)] # to numpy
+ if len(stats) and stats[0].any():
+ p, r, ap, f1, ap_class = ap_per_class(*stats, plot=plots, save_dir=save_dir, names=names)
+ ap50, ap = ap[:, 0], ap.mean(1) # AP@0.5, AP@0.5:0.95
+ mp, mr, map50, map = p.mean(), r.mean(), ap50.mean(), ap.mean()
+ nt = np.bincount(stats[3].astype(np.int64), minlength=nc) # number of targets per class
+ else:
+ nt = torch.zeros(1)
+
+ # Print results
+ pf = '%20s' + '%11i' * 2 + '%11.3g' * 4 # print format
+ print(pf % ('all', seen, nt.sum(), mp, mr, map50, map))
+
+ # Print results per class
+ if (verbose or (nc < 50 and not training)) and nc > 1 and len(stats):
+ for i, c in enumerate(ap_class):
+ print(pf % (names[c], seen, nt[c], p[i], r[i], ap50[i], ap[i]))
+
+ # Print speeds
+ t = tuple(x / seen * 1E3 for x in (t0, t1, t2)) # speeds per image
+ if not training:
+ shape = (batch_size, 3, imgsz, imgsz)
+ print(f'Speed: %.1fms pre-process, %.1fms inference, %.1fms NMS per image at shape {shape}' % t)
+
+ # Plots
+ if plots:
+ confusion_matrix.plot(save_dir=save_dir, names=list(names.values()))
+ callbacks.on_val_end()
+
+ # Save JSON
+ if save_json and len(jdict):
+ w = Path(weights[0] if isinstance(weights, list) else weights).stem if weights is not None else '' # weights
+ anno_json = str(Path(data.get('path', '../coco')) / 'annotations/instances_val2017.json') # annotations json
+ pred_json = str(save_dir / f"{w}_predictions.json") # predictions json
+ print(f'\nEvaluating pycocotools mAP... saving {pred_json}...')
+ with open(pred_json, 'w') as f:
+ json.dump(jdict, f)
+
+ try: # https://github.com/cocodataset/cocoapi/blob/master/PythonAPI/pycocoEvalDemo.ipynb
+ check_requirements(['pycocotools'])
+ from pycocotools.coco import COCO
+ from pycocotools.cocoeval import COCOeval
+
+ anno = COCO(anno_json) # init annotations api
+ pred = anno.loadRes(pred_json) # init predictions api
+ eval = COCOeval(anno, pred, 'bbox')
+ if is_coco:
+ eval.params.imgIds = [int(Path(x).stem) for x in dataloader.dataset.img_files] # image IDs to evaluate
+ eval.evaluate()
+ eval.accumulate()
+ eval.summarize()
+ map, map50 = eval.stats[:2] # update results (mAP@0.5:0.95, mAP@0.5)
+ except Exception as e:
+ print(f'pycocotools unable to run: {e}')
+
+ extra_videos = []
+ if run_aisa_plots:
+ fig, suggested_threshold = plot_object_count_difference_ridgeline(ground_truths_extra, preds_extra)
+
+ def video_prediction_function(frame_array):
+ n_frames = len(frame_array)
+ preds = []
+ for i in range(0, n_frames, 4):
+ frames = []
+ for frame in frame_array[i: min(i + 4, n_frames)]:
+ from utils.datasets import letterbox
+ img = letterbox(frame, new_shape=(imgsz,imgsz))[0]
+ img = np.array([img, img, img])
+ img = np.ascontiguousarray(img)
+ frames.append(img)
+ frames = np.array(frames)
+
+ # Convert img to torch
+ img = torch.from_numpy(frames).to(device)
+ img = img.half() if device.type != "cpu" else img.float() # uint8 to fp16/32
+ img /= 255.0 # 0 - 255 to 0.0 - 1.0
+ if img.ndimension() == 3:
+ img = img.unsqueeze(0)
+ # Inference
+ # t1 = time_synchronized()
+ pred = model(img, augment=False)[0]
+
+ # Apply NMS
+ pred = non_max_suppression(pred, conf_thres=suggested_threshold)
+ preds += list(pred)
+ return preds
+
+ video_path = Path(r"D:\Nanovare\data\karolinska\capture_MAST_data\2020_05_27\tp49\cover1_7.avi")
+ v = make_video_results(video_path, video_prediction_function)
+ extra_plots = [fig]
+
+ # Return results
+ model.float() # for training
+ if not training:
+ s = f"\n{len(list(save_dir.glob('labels/*.txt')))} labels saved to {save_dir / 'labels'}" if save_txt else ''
+ print(f"Results saved to {colorstr('bold', save_dir)}{s}")
+ maps = np.zeros(nc) + map
+ for i, c in enumerate(ap_class):
+ maps[c] = ap[i]
+ extra_metrics = [_/len(dataloader) for _ in extra_metrics]
+
+ return (mp, mr, map50, map, *(loss.cpu() / len(dataloader)).tolist()), maps, t, extra_metrics, extra_plots, extra_videos
+
+
+def parse_opt():
+ parser = argparse.ArgumentParser(prog='val.py')
+ parser.add_argument('--data', type=str, default='data/coco128.yaml', help='dataset.yaml path')
+ parser.add_argument('--weights', nargs='+', type=str, default='yolov5s.pt', help='model.pt path(s)')
+ parser.add_argument('--batch-size', type=int, default=32, help='batch size')
+ parser.add_argument('--imgsz', '--img', '--img-size', type=int, default=640, help='inference size (pixels)')
+ parser.add_argument('--conf-thres', type=float, default=0.001, help='confidence threshold')
+ parser.add_argument('--iou-thres', type=float, default=0.6, help='NMS IoU threshold')
+ parser.add_argument('--task', default='val', help='train, val, test, speed or study')
+ parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--single-cls', action='store_true', help='treat as single-class dataset')
+ parser.add_argument('--augment', action='store_true', help='augmented inference')
+ parser.add_argument('--verbose', action='store_true', help='report mAP by class')
+ parser.add_argument('--save-txt', action='store_true', help='save results to *.txt')
+ parser.add_argument('--save-hybrid', action='store_true', help='save label+prediction hybrid results to *.txt')
+ parser.add_argument('--save-conf', action='store_true', help='save confidences in --save-txt labels')
+ parser.add_argument('--save-json', action='store_true', help='save a COCO-JSON results file')
+ parser.add_argument('--project', default='runs/val', help='save to project/name')
+ parser.add_argument('--name', default='exp', help='save to project/name')
+ parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
+ parser.add_argument('--half', action='store_true', help='use FP16 half-precision inference')
+ opt = parser.parse_args()
+ opt.save_json |= opt.data.endswith('coco.yaml')
+ opt.save_txt |= opt.save_hybrid
+ opt.data = check_file(opt.data) # check file
+ return opt
+
+
+def main(opt):
+ set_logging()
+ print(colorstr('val: ') + ', '.join(f'{k}={v}' for k, v in vars(opt).items()))
+ check_requirements(requirements=FILE.parent / 'requirements.txt', exclude=('tensorboard', 'thop'))
+
+ if opt.task in ('train', 'val', 'test'): # run normally
+ run(**vars(opt))
+
+ elif opt.task == 'speed': # speed benchmarks
+ for w in opt.weights if isinstance(opt.weights, list) else [opt.weights]:
+ run(opt.data, weights=w, batch_size=opt.batch_size, imgsz=opt.imgsz, conf_thres=.25, iou_thres=.45,
+ save_json=False, plots=False)
+
+ elif opt.task == 'study': # run over a range of settings and save/plot
+ # python val.py --task study --data coco.yaml --iou 0.7 --weights yolov5s.pt yolov5m.pt yolov5l.pt yolov5x.pt
+ x = list(range(256, 1536 + 128, 128)) # x axis (image sizes)
+ for w in opt.weights if isinstance(opt.weights, list) else [opt.weights]:
+ f = f'study_{Path(opt.data).stem}_{Path(w).stem}.txt' # filename to save to
+ y = [] # y axis
+ for i in x: # img-size
+ print(f'\nRunning {f} point {i}...')
+ r, _, t = run(opt.data, weights=w, batch_size=opt.batch_size, imgsz=i, conf_thres=opt.conf_thres,
+ iou_thres=opt.iou_thres, save_json=opt.save_json, plots=False)
+ y.append(r + t) # results and times
+ np.savetxt(f, y, fmt='%10.4g') # save
+ os.system('zip -r study.zip study_*.txt')
+ plot_study_txt(x=x) # plot
+
+
+if __name__ == "__main__":
+ opt = parse_opt()
+ main(opt)
diff --git a/weights/download_weights.sh b/weights/download_weights.sh
deleted file mode 100755
index 206b7002aec..00000000000
--- a/weights/download_weights.sh
+++ /dev/null
@@ -1,10 +0,0 @@
-#!/bin/bash
-# Download common models
-
-python -c "
-from utils.google_utils import *;
-attempt_download('weights/yolov5s.pt');
-attempt_download('weights/yolov5m.pt');
-attempt_download('weights/yolov5l.pt');
-attempt_download('weights/yolov5x.pt')
-"
+
+ ## Environments
+ YOLOv5 may be run in any of the following up-to-date verified environments (with all dependencies including [CUDA](https://developer.nvidia.com/cuda)/[CUDNN](https://developer.nvidia.com/cudnn), [Python](https://www.python.org/) and [PyTorch](https://pytorch.org/) preinstalled):
+
+ * **Google Colab and Kaggle** notebooks with free GPU: [](https://colab.research.google.com/github/ultralytics/yolov5/blob/master/tutorial.ipynb) [](https://www.kaggle.com/ultralytics/yolov5)
+ * **Google Cloud** Deep Learning VM. See [GCP Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/GCP-Quickstart)
+ * **Amazon** Deep Learning AMI. See [AWS Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/AWS-Quickstart)
+ * **Docker Image**. See [Docker Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/Docker-Quickstart) [](https://hub.docker.com/r/ultralytics/yolov5)
+
+ ## Status
+ 
+
+ If this badge is green, all [YOLOv5 GitHub Actions](https://github.com/ultralytics/yolov5/actions) Continuous Integration (CI) tests are currently passing. CI tests verify correct operation of YOLOv5 training ([train.py](https://github.com/ultralytics/yolov5/blob/master/train.py)), validation ([val.py](https://github.com/ultralytics/yolov5/blob/master/val.py)), inference ([detect.py](https://github.com/ultralytics/yolov5/blob/master/detect.py)) and export ([export.py](https://github.com/ultralytics/yolov5/blob/master/export.py)) on MacOS, Windows, and Ubuntu every 24 hours and on every commit.
+
diff --git a/utils/loggers/wandb/__init__.py b/utils/loggers/wandb/__init__.py
new file mode 100644
index 00000000000..e69de29bb2d
diff --git a/utils/loggers/wandb/log_dataset.py b/utils/loggers/wandb/log_dataset.py
new file mode 100644
index 00000000000..8447272cdb4
--- /dev/null
+++ b/utils/loggers/wandb/log_dataset.py
@@ -0,0 +1,23 @@
+import argparse
+
+from wandb_utils import WandbLogger
+
+WANDB_ARTIFACT_PREFIX = 'wandb-artifact://'
+
+
+def create_dataset_artifact(opt):
+ logger = WandbLogger(opt, None, job_type='Dataset Creation') # TODO: return value unused
+
+
+if __name__ == '__main__':
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--data', type=str, default='data/coco128.yaml', help='data.yaml path')
+ parser.add_argument('--single-cls', action='store_true', help='train as single-class dataset')
+ parser.add_argument('--project', type=str, default='YOLOv5', help='name of W&B Project')
+ parser.add_argument('--entity', default=None, help='W&B entity')
+ parser.add_argument('--name', type=str, default='log dataset', help='name of W&B run')
+
+ opt = parser.parse_args()
+ opt.resume = False # Explicitly disallow resume check for dataset upload job
+
+ create_dataset_artifact(opt)
diff --git a/utils/loggers/wandb/sweep.py b/utils/loggers/wandb/sweep.py
new file mode 100644
index 00000000000..2dcda508eb5
--- /dev/null
+++ b/utils/loggers/wandb/sweep.py
@@ -0,0 +1,33 @@
+import sys
+from pathlib import Path
+
+import wandb
+
+FILE = Path(__file__).absolute()
+sys.path.append(FILE.parents[3].as_posix()) # add utils/ to path
+
+from train import train, parse_opt
+from utils.general import increment_path
+from utils.torch_utils import select_device
+
+
+def sweep():
+ wandb.init()
+ # Get hyp dict from sweep agent
+ hyp_dict = vars(wandb.config).get("_items")
+
+ # Workaround: get necessary opt args
+ opt = parse_opt(known=True)
+ opt.batch_size = hyp_dict.get("batch_size")
+ opt.save_dir = str(increment_path(Path(opt.project) / opt.name, exist_ok=opt.exist_ok or opt.evolve))
+ opt.epochs = hyp_dict.get("epochs")
+ opt.nosave = True
+ opt.data = hyp_dict.get("data")
+ device = select_device(opt.device, batch_size=opt.batch_size)
+
+ # train
+ train(hyp_dict, opt, device)
+
+
+if __name__ == "__main__":
+ sweep()
diff --git a/utils/loggers/wandb/sweep.yaml b/utils/loggers/wandb/sweep.yaml
new file mode 100644
index 00000000000..c3727de82d4
--- /dev/null
+++ b/utils/loggers/wandb/sweep.yaml
@@ -0,0 +1,143 @@
+# Hyperparameters for training
+# To set range-
+# Provide min and max values as:
+# parameter:
+#
+# min: scalar
+# max: scalar
+# OR
+#
+# Set a specific list of search space-
+# parameter:
+# values: [scalar1, scalar2, scalar3...]
+#
+# You can use grid, bayesian and hyperopt search strategy
+# For more info on configuring sweeps visit - https://docs.wandb.ai/guides/sweeps/configuration
+
+program: utils/loggers/wandb/sweep.py
+method: random
+metric:
+ name: metrics/mAP_0.5
+ goal: maximize
+
+parameters:
+ # hyperparameters: set either min, max range or values list
+ data:
+ value: "data/coco128.yaml"
+ batch_size:
+ values: [64]
+ epochs:
+ values: [10]
+
+ lr0:
+ distribution: uniform
+ min: 1e-5
+ max: 1e-1
+ lrf:
+ distribution: uniform
+ min: 0.01
+ max: 1.0
+ momentum:
+ distribution: uniform
+ min: 0.6
+ max: 0.98
+ weight_decay:
+ distribution: uniform
+ min: 0.0
+ max: 0.001
+ warmup_epochs:
+ distribution: uniform
+ min: 0.0
+ max: 5.0
+ warmup_momentum:
+ distribution: uniform
+ min: 0.0
+ max: 0.95
+ warmup_bias_lr:
+ distribution: uniform
+ min: 0.0
+ max: 0.2
+ box:
+ distribution: uniform
+ min: 0.02
+ max: 0.2
+ cls:
+ distribution: uniform
+ min: 0.2
+ max: 4.0
+ cls_pw:
+ distribution: uniform
+ min: 0.5
+ max: 2.0
+ obj:
+ distribution: uniform
+ min: 0.2
+ max: 4.0
+ obj_pw:
+ distribution: uniform
+ min: 0.5
+ max: 2.0
+ iou_t:
+ distribution: uniform
+ min: 0.1
+ max: 0.7
+ anchor_t:
+ distribution: uniform
+ min: 2.0
+ max: 8.0
+ fl_gamma:
+ distribution: uniform
+ min: 0.0
+ max: 0.1
+ hsv_h:
+ distribution: uniform
+ min: 0.0
+ max: 0.1
+ hsv_s:
+ distribution: uniform
+ min: 0.0
+ max: 0.9
+ hsv_v:
+ distribution: uniform
+ min: 0.0
+ max: 0.9
+ degrees:
+ distribution: uniform
+ min: 0.0
+ max: 45.0
+ translate:
+ distribution: uniform
+ min: 0.0
+ max: 0.9
+ scale:
+ distribution: uniform
+ min: 0.0
+ max: 0.9
+ shear:
+ distribution: uniform
+ min: 0.0
+ max: 10.0
+ perspective:
+ distribution: uniform
+ min: 0.0
+ max: 0.001
+ flipud:
+ distribution: uniform
+ min: 0.0
+ max: 1.0
+ fliplr:
+ distribution: uniform
+ min: 0.0
+ max: 1.0
+ mosaic:
+ distribution: uniform
+ min: 0.0
+ max: 1.0
+ mixup:
+ distribution: uniform
+ min: 0.0
+ max: 1.0
+ copy_paste:
+ distribution: uniform
+ min: 0.0
+ max: 1.0
diff --git a/utils/loggers/wandb/wandb_utils.py b/utils/loggers/wandb/wandb_utils.py
new file mode 100644
index 00000000000..5d495c70517
--- /dev/null
+++ b/utils/loggers/wandb/wandb_utils.py
@@ -0,0 +1,519 @@
+"""Utilities and tools for tracking runs with Weights & Biases."""
+
+import logging
+import os
+import sys
+from contextlib import contextmanager
+from pathlib import Path
+
+import yaml
+from tqdm import tqdm
+
+FILE = Path(__file__).absolute()
+sys.path.append(FILE.parents[3].as_posix()) # add yolov5/ to path
+
+from utils.datasets import LoadImagesAndLabels
+from utils.datasets import img2label_paths
+from utils.general import check_dataset, check_file
+
+try:
+ import wandb
+
+ assert hasattr(wandb, '__version__') # verify package import not local dir
+except (ImportError, AssertionError):
+ wandb = None
+
+RANK = int(os.getenv('RANK', -1))
+WANDB_ARTIFACT_PREFIX = 'wandb-artifact://'
+
+
+def remove_prefix(from_string, prefix=WANDB_ARTIFACT_PREFIX):
+ return from_string[len(prefix):]
+
+
+def check_wandb_config_file(data_config_file):
+ wandb_config = '_wandb.'.join(data_config_file.rsplit('.', 1)) # updated data.yaml path
+ if Path(wandb_config).is_file():
+ return wandb_config
+ return data_config_file
+
+
+def check_wandb_dataset(data_file):
+ is_wandb_artifact = False
+ if check_file(data_file) and data_file.endswith('.yaml'):
+ with open(data_file, errors='ignore') as f:
+ data_dict = yaml.safe_load(f)
+ is_wandb_artifact = (data_dict['train'].startswith(WANDB_ARTIFACT_PREFIX) or
+ data_dict['val'].startswith(WANDB_ARTIFACT_PREFIX))
+ if is_wandb_artifact:
+ return data_dict
+ else:
+ return check_dataset(data_file)
+
+
+def get_run_info(run_path):
+ run_path = Path(remove_prefix(run_path, WANDB_ARTIFACT_PREFIX))
+ run_id = run_path.stem
+ project = run_path.parent.stem
+ entity = run_path.parent.parent.stem
+ model_artifact_name = 'run_' + run_id + '_model'
+ return entity, project, run_id, model_artifact_name
+
+
+def check_wandb_resume(opt):
+ process_wandb_config_ddp_mode(opt) if RANK not in [-1, 0] else None
+ if isinstance(opt.resume, str):
+ if opt.resume.startswith(WANDB_ARTIFACT_PREFIX):
+ if RANK not in [-1, 0]: # For resuming DDP runs
+ entity, project, run_id, model_artifact_name = get_run_info(opt.resume)
+ api = wandb.Api()
+ artifact = api.artifact(entity + '/' + project + '/' + model_artifact_name + ':latest')
+ modeldir = artifact.download()
+ opt.weights = str(Path(modeldir) / "last.pt")
+ return True
+ return None
+
+
+def process_wandb_config_ddp_mode(opt):
+ with open(check_file(opt.data), errors='ignore') as f:
+ data_dict = yaml.safe_load(f) # data dict
+ train_dir, val_dir = None, None
+ if isinstance(data_dict['train'], str) and data_dict['train'].startswith(WANDB_ARTIFACT_PREFIX):
+ api = wandb.Api()
+ train_artifact = api.artifact(remove_prefix(data_dict['train']) + ':' + opt.artifact_alias)
+ train_dir = train_artifact.download()
+ train_path = Path(train_dir) / 'data/images/'
+ data_dict['train'] = str(train_path)
+
+ if isinstance(data_dict['val'], str) and data_dict['val'].startswith(WANDB_ARTIFACT_PREFIX):
+ api = wandb.Api()
+ val_artifact = api.artifact(remove_prefix(data_dict['val']) + ':' + opt.artifact_alias)
+ val_dir = val_artifact.download()
+ val_path = Path(val_dir) / 'data/images/'
+ data_dict['val'] = str(val_path)
+ if train_dir or val_dir:
+ ddp_data_path = str(Path(val_dir) / 'wandb_local_data.yaml')
+ with open(ddp_data_path, 'w') as f:
+ yaml.safe_dump(data_dict, f)
+ opt.data = ddp_data_path
+
+
+class WandbLogger():
+ """Log training runs, datasets, models, and predictions to Weights & Biases.
+
+ This logger sends information to W&B at wandb.ai. By default, this information
+ includes hyperparameters, system configuration and metrics, model metrics,
+ and basic data metrics and analyses.
+
+ By providing additional command line arguments to train.py, datasets,
+ models and predictions can also be logged.
+
+ For more on how this logger is used, see the Weights & Biases documentation:
+ https://docs.wandb.com/guides/integrations/yolov5
+ """
+
+ def __init__(self, opt, run_id=None, job_type='Training'):
+ """
+ - Initialize WandbLogger instance
+ - Upload dataset if opt.upload_dataset is True
+ - Setup trainig processes if job_type is 'Training'
+
+ arguments:
+ opt (namespace) -- Commandline arguments for this run
+ run_id (str) -- Run ID of W&B run to be resumed
+ job_type (str) -- To set the job_type for this run
+
+ """
+ # Pre-training routine --
+ self.job_type = job_type
+ self.wandb, self.wandb_run = wandb, None if not wandb else wandb.run
+ self.val_artifact, self.train_artifact = None, None
+ self.train_artifact_path, self.val_artifact_path = None, None
+ self.result_artifact = None
+ self.val_table, self.result_table = None, None
+ self.bbox_media_panel_images = []
+ self.val_table_path_map = None
+ self.max_imgs_to_log = 16
+ self.wandb_artifact_data_dict = None
+ self.data_dict = None
+ # It's more elegant to stick to 1 wandb.init call, but useful config data is overwritten in the WandbLogger's wandb.init call
+ if isinstance(opt.resume, str): # checks resume from artifact
+ if opt.resume.startswith(WANDB_ARTIFACT_PREFIX):
+ entity, project, run_id, model_artifact_name = get_run_info(opt.resume)
+ model_artifact_name = WANDB_ARTIFACT_PREFIX + model_artifact_name
+ assert wandb, 'install wandb to resume wandb runs'
+ # Resume wandb-artifact:// runs here| workaround for not overwriting wandb.config
+ self.wandb_run = wandb.init(id=run_id,
+ project=project,
+ entity=entity,
+ resume='allow',
+ allow_val_change=True)
+ opt.resume = model_artifact_name
+ elif self.wandb:
+ self.wandb_run = wandb.init(config=opt,
+ resume="allow",
+ project='YOLOv5' if opt.project == 'runs/train' else Path(opt.project).stem,
+ entity=opt.entity,
+ name=opt.name if opt.name != 'exp' else None,
+ job_type=job_type,
+ id=run_id,
+ allow_val_change=True) if not wandb.run else wandb.run
+ if self.wandb_run:
+ if self.job_type == 'Training':
+ if opt.upload_dataset:
+ if not opt.resume:
+ self.wandb_artifact_data_dict = self.check_and_upload_dataset(opt)
+
+ if opt.resume:
+ # resume from artifact
+ if isinstance(opt.resume, str) and opt.resume.startswith(WANDB_ARTIFACT_PREFIX):
+ self.data_dict = dict(self.wandb_run.config.data_dict)
+ else: # local resume
+ self.data_dict = check_wandb_dataset(opt.data)
+ else:
+ self.data_dict = check_wandb_dataset(opt.data)
+ self.wandb_artifact_data_dict = self.wandb_artifact_data_dict or self.data_dict
+
+ # write data_dict to config. useful for resuming from artifacts. Do this only when not resuming.
+ self.wandb_run.config.update({'data_dict': self.wandb_artifact_data_dict},
+ allow_val_change=True)
+ self.setup_training(opt)
+
+ if self.job_type == 'Dataset Creation':
+ self.data_dict = self.check_and_upload_dataset(opt)
+
+ def check_and_upload_dataset(self, opt):
+ """
+ Check if the dataset format is compatible and upload it as W&B artifact
+
+ arguments:
+ opt (namespace)-- Commandline arguments for current run
+
+ returns:
+ Updated dataset info dictionary where local dataset paths are replaced by WAND_ARFACT_PREFIX links.
+ """
+ assert wandb, 'Install wandb to upload dataset'
+ config_path = self.log_dataset_artifact(opt.data,
+ opt.single_cls,
+ 'YOLOv5' if opt.project == 'runs/train' else Path(opt.project).stem)
+ print("Created dataset config file ", config_path)
+ with open(config_path, errors='ignore') as f:
+ wandb_data_dict = yaml.safe_load(f)
+ return wandb_data_dict
+
+ def setup_training(self, opt):
+ """
+ Setup the necessary processes for training YOLO models:
+ - Attempt to download model checkpoint and dataset artifacts if opt.resume stats with WANDB_ARTIFACT_PREFIX
+ - Update data_dict, to contain info of previous run if resumed and the paths of dataset artifact if downloaded
+ - Setup log_dict, initialize bbox_interval
+
+ arguments:
+ opt (namespace) -- commandline arguments for this run
+
+ """
+ self.log_dict, self.current_epoch = {}, 0
+ self.bbox_interval = opt.bbox_interval
+ if isinstance(opt.resume, str):
+ modeldir, _ = self.download_model_artifact(opt)
+ if modeldir:
+ self.weights = Path(modeldir) / "last.pt"
+ config = self.wandb_run.config
+ opt.weights, opt.save_period, opt.batch_size, opt.bbox_interval, opt.epochs, opt.hyp = str(
+ self.weights), config.save_period, config.batch_size, config.bbox_interval, config.epochs, \
+ config.hyp
+ data_dict = self.data_dict
+ if self.val_artifact is None: # If --upload_dataset is set, use the existing artifact, don't download
+ self.train_artifact_path, self.train_artifact = self.download_dataset_artifact(data_dict.get('train'),
+ opt.artifact_alias)
+ self.val_artifact_path, self.val_artifact = self.download_dataset_artifact(data_dict.get('val'),
+ opt.artifact_alias)
+
+ if self.train_artifact_path is not None:
+ train_path = Path(self.train_artifact_path) / 'data/images/'
+ data_dict['train'] = str(train_path)
+ if self.val_artifact_path is not None:
+ val_path = Path(self.val_artifact_path) / 'data/images/'
+ data_dict['val'] = str(val_path)
+
+ if self.val_artifact is not None:
+ self.result_artifact = wandb.Artifact("run_" + wandb.run.id + "_progress", "evaluation")
+ self.result_table = wandb.Table(["epoch", "id", "ground truth", "prediction", "avg_confidence"])
+ self.val_table = self.val_artifact.get("val")
+ if self.val_table_path_map is None:
+ self.map_val_table_path()
+ if opt.bbox_interval == -1:
+ self.bbox_interval = opt.bbox_interval = (opt.epochs // 10) if opt.epochs > 10 else 1
+ train_from_artifact = self.train_artifact_path is not None and self.val_artifact_path is not None
+ # Update the the data_dict to point to local artifacts dir
+ if train_from_artifact:
+ self.data_dict = data_dict
+
+ def download_dataset_artifact(self, path, alias):
+ """
+ download the model checkpoint artifact if the path starts with WANDB_ARTIFACT_PREFIX
+
+ arguments:
+ path -- path of the dataset to be used for training
+ alias (str)-- alias of the artifact to be download/used for training
+
+ returns:
+ (str, wandb.Artifact) -- path of the downladed dataset and it's corresponding artifact object if dataset
+ is found otherwise returns (None, None)
+ """
+ if isinstance(path, str) and path.startswith(WANDB_ARTIFACT_PREFIX):
+ artifact_path = Path(remove_prefix(path, WANDB_ARTIFACT_PREFIX) + ":" + alias)
+ dataset_artifact = wandb.use_artifact(artifact_path.as_posix().replace("\\", "/"))
+ assert dataset_artifact is not None, "'Error: W&B dataset artifact doesn\'t exist'"
+ datadir = dataset_artifact.download()
+ return datadir, dataset_artifact
+ return None, None
+
+ def download_model_artifact(self, opt):
+ """
+ download the model checkpoint artifact if the resume path starts with WANDB_ARTIFACT_PREFIX
+
+ arguments:
+ opt (namespace) -- Commandline arguments for this run
+ """
+ if opt.resume.startswith(WANDB_ARTIFACT_PREFIX):
+ model_artifact = wandb.use_artifact(remove_prefix(opt.resume, WANDB_ARTIFACT_PREFIX) + ":latest")
+ assert model_artifact is not None, 'Error: W&B model artifact doesn\'t exist'
+ modeldir = model_artifact.download()
+ epochs_trained = model_artifact.metadata.get('epochs_trained')
+ total_epochs = model_artifact.metadata.get('total_epochs')
+ is_finished = total_epochs is None
+ assert not is_finished, 'training is finished, can only resume incomplete runs.'
+ return modeldir, model_artifact
+ return None, None
+
+ def log_model(self, path, opt, epoch, fitness_score, best_model=False):
+ """
+ Log the model checkpoint as W&B artifact
+
+ arguments:
+ path (Path) -- Path of directory containing the checkpoints
+ opt (namespace) -- Command line arguments for this run
+ epoch (int) -- Current epoch number
+ fitness_score (float) -- fitness score for current epoch
+ best_model (boolean) -- Boolean representing if the current checkpoint is the best yet.
+ """
+ model_artifact = wandb.Artifact('run_' + wandb.run.id + '_model', type='model', metadata={
+ 'original_url': str(path),
+ 'epochs_trained': epoch + 1,
+ 'save period': opt.save_period,
+ 'project': opt.project,
+ 'total_epochs': opt.epochs,
+ 'fitness_score': fitness_score
+ })
+ model_artifact.add_file(str(path / 'last.pt'), name='last.pt')
+ wandb.log_artifact(model_artifact,
+ aliases=['latest', 'last', 'epoch ' + str(self.current_epoch), 'best' if best_model else ''])
+ print("Saving model artifact on epoch ", epoch + 1)
+
+ def log_dataset_artifact(self, data_file, single_cls, project, overwrite_config=False):
+ """
+ Log the dataset as W&B artifact and return the new data file with W&B links
+
+ arguments:
+ data_file (str) -- the .yaml file with information about the dataset like - path, classes etc.
+ single_class (boolean) -- train multi-class data as single-class
+ project (str) -- project name. Used to construct the artifact path
+ overwrite_config (boolean) -- overwrites the data.yaml file if set to true otherwise creates a new
+ file with _wandb postfix. Eg -> data_wandb.yaml
+
+ returns:
+ the new .yaml file with artifact links. it can be used to start training directly from artifacts
+ """
+ self.data_dict = check_dataset(data_file) # parse and check
+ data = dict(self.data_dict)
+ nc, names = (1, ['item']) if single_cls else (int(data['nc']), data['names'])
+ names = {k: v for k, v in enumerate(names)} # to index dictionary
+ self.train_artifact = self.create_dataset_table(LoadImagesAndLabels(
+ data['train'], rect=True, batch_size=1), names, name='train') if data.get('train') else None
+ self.val_artifact = self.create_dataset_table(LoadImagesAndLabels(
+ data['val'], rect=True, batch_size=1), names, name='val') if data.get('val') else None
+ if data.get('train'):
+ data['train'] = WANDB_ARTIFACT_PREFIX + str(Path(project) / 'train')
+ if data.get('val'):
+ data['val'] = WANDB_ARTIFACT_PREFIX + str(Path(project) / 'val')
+ path = Path(data_file).stem
+ path = (path if overwrite_config else path + '_wandb') + '.yaml' # updated data.yaml path
+ data.pop('download', None)
+ data.pop('path', None)
+ with open(path, 'w') as f:
+ yaml.safe_dump(data, f)
+
+ if self.job_type == 'Training': # builds correct artifact pipeline graph
+ self.wandb_run.use_artifact(self.val_artifact)
+ self.wandb_run.use_artifact(self.train_artifact)
+ self.val_artifact.wait()
+ self.val_table = self.val_artifact.get('val')
+ self.map_val_table_path()
+ else:
+ self.wandb_run.log_artifact(self.train_artifact)
+ self.wandb_run.log_artifact(self.val_artifact)
+ return path
+
+ def map_val_table_path(self):
+ """
+ Map the validation dataset Table like name of file -> it's id in the W&B Table.
+ Useful for - referencing artifacts for evaluation.
+ """
+ self.val_table_path_map = {}
+ print("Mapping dataset")
+ for i, data in enumerate(tqdm(self.val_table.data)):
+ self.val_table_path_map[data[3]] = data[0]
+
+ def create_dataset_table(self, dataset, class_to_id, name='dataset'):
+ """
+ Create and return W&B artifact containing W&B Table of the dataset.
+
+ arguments:
+ dataset (LoadImagesAndLabels) -- instance of LoadImagesAndLabels class used to iterate over the data to build Table
+ class_to_id (dict(int, str)) -- hash map that maps class ids to labels
+ name (str) -- name of the artifact
+
+ returns:
+ dataset artifact to be logged or used
+ """
+ # TODO: Explore multiprocessing to slpit this loop parallely| This is essential for speeding up the the logging
+ artifact = wandb.Artifact(name=name, type="dataset")
+ img_files = tqdm([dataset.path]) if isinstance(dataset.path, str) and Path(dataset.path).is_dir() else None
+ img_files = tqdm(dataset.img_files) if not img_files else img_files
+ for img_file in img_files:
+ if Path(img_file).is_dir():
+ artifact.add_dir(img_file, name='data/images')
+ labels_path = 'labels'.join(dataset.path.rsplit('images', 1))
+ artifact.add_dir(labels_path, name='data/labels')
+ else:
+ artifact.add_file(img_file, name='data/images/' + Path(img_file).name)
+ label_file = Path(img2label_paths([img_file])[0])
+ artifact.add_file(str(label_file),
+ name='data/labels/' + label_file.name) if label_file.exists() else None
+ table = wandb.Table(columns=["id", "train_image", "Classes", "name"])
+ class_set = wandb.Classes([{'id': id, 'name': name} for id, name in class_to_id.items()])
+ for si, (img, labels, paths, shapes) in enumerate(tqdm(dataset)):
+ box_data, img_classes = [], {}
+ for cls, *xywh in labels[:, 1:].tolist():
+ cls = int(cls)
+ box_data.append({"position": {"middle": [xywh[0], xywh[1]], "width": xywh[2], "height": xywh[3]},
+ "class_id": cls,
+ "box_caption": "%s" % (class_to_id[cls])})
+ img_classes[cls] = class_to_id[cls]
+ boxes = {"ground_truth": {"box_data": box_data, "class_labels": class_to_id}} # inference-space
+ table.add_data(si, wandb.Image(paths, classes=class_set, boxes=boxes), list(img_classes.values()),
+ Path(paths).name)
+ artifact.add(table, name)
+ return artifact
+
+ def log_training_progress(self, predn, path, names):
+ """
+ Build evaluation Table. Uses reference from validation dataset table.
+
+ arguments:
+ predn (list): list of predictions in the native space in the format - [xmin, ymin, xmax, ymax, confidence, class]
+ path (str): local path of the current evaluation image
+ names (dict(int, str)): hash map that maps class ids to labels
+ """
+ class_set = wandb.Classes([{'id': id, 'name': name} for id, name in names.items()])
+ box_data = []
+ total_conf = 0
+ for *xyxy, conf, cls in predn.tolist():
+ if conf >= 0.25:
+ box_data.append(
+ {"position": {"minX": xyxy[0], "minY": xyxy[1], "maxX": xyxy[2], "maxY": xyxy[3]},
+ "class_id": int(cls),
+ "box_caption": "%s %.3f" % (names[cls], conf),
+ "scores": {"class_score": conf},
+ "domain": "pixel"})
+ total_conf = total_conf + conf
+ boxes = {"predictions": {"box_data": box_data, "class_labels": names}} # inference-space
+ id = self.val_table_path_map[Path(path).name]
+ self.result_table.add_data(self.current_epoch,
+ id,
+ self.val_table.data[id][1],
+ wandb.Image(self.val_table.data[id][1], boxes=boxes, classes=class_set),
+ total_conf / max(1, len(box_data))
+ )
+
+ def val_one_image(self, pred, predn, path, names, im):
+ """
+ Log validation data for one image. updates the result Table if validation dataset is uploaded and log bbox media panel
+
+ arguments:
+ pred (list): list of scaled predictions in the format - [xmin, ymin, xmax, ymax, confidence, class]
+ predn (list): list of predictions in the native space - [xmin, ymin, xmax, ymax, confidence, class]
+ path (str): local path of the current evaluation image
+ """
+ if self.val_table and self.result_table: # Log Table if Val dataset is uploaded as artifact
+ self.log_training_progress(predn, path, names)
+
+ if len(self.bbox_media_panel_images) < self.max_imgs_to_log and self.current_epoch > 0:
+ if self.current_epoch % self.bbox_interval == 0:
+ box_data = [{"position": {"minX": xyxy[0], "minY": xyxy[1], "maxX": xyxy[2], "maxY": xyxy[3]},
+ "class_id": int(cls),
+ "box_caption": "%s %.3f" % (names[cls], conf),
+ "scores": {"class_score": conf},
+ "domain": "pixel"} for *xyxy, conf, cls in pred.tolist()]
+ boxes = {"predictions": {"box_data": box_data, "class_labels": names}} # inference-space
+ self.bbox_media_panel_images.append(wandb.Image(im, boxes=boxes, caption=path.name))
+
+ def log(self, log_dict):
+ """
+ save the metrics to the logging dictionary
+
+ arguments:
+ log_dict (Dict) -- metrics/media to be logged in current step
+ """
+ if self.wandb_run:
+ for key, value in log_dict.items():
+ self.log_dict[key] = value
+
+ def end_epoch(self, best_result=False):
+ """
+ commit the log_dict, model artifacts and Tables to W&B and flush the log_dict.
+
+ arguments:
+ best_result (boolean): Boolean representing if the result of this evaluation is best or not
+ """
+ if self.wandb_run:
+ with all_logging_disabled():
+ if self.bbox_media_panel_images:
+ self.log_dict["Bounding Box Debugger/Images"] = self.bbox_media_panel_images
+ wandb.log(self.log_dict)
+ self.log_dict = {}
+ self.bbox_media_panel_images = []
+ if self.result_artifact:
+ self.result_artifact.add(self.result_table, 'result')
+ wandb.log_artifact(self.result_artifact, aliases=['latest', 'last', 'epoch ' + str(self.current_epoch),
+ ('best' if best_result else '')])
+
+ wandb.log({"evaluation": self.result_table})
+ self.result_table = wandb.Table(["epoch", "id", "ground truth", "prediction", "avg_confidence"])
+ self.result_artifact = wandb.Artifact("run_" + wandb.run.id + "_progress", "evaluation")
+
+ def finish_run(self):
+ """
+ Log metrics if any and finish the current W&B run
+ """
+ if self.wandb_run:
+ if self.log_dict:
+ with all_logging_disabled():
+ wandb.log(self.log_dict)
+ wandb.run.finish()
+
+
+@contextmanager
+def all_logging_disabled(highest_level=logging.CRITICAL):
+ """ source - https://gist.github.com/simon-weber/7853144
+ A context manager that will prevent any logging messages triggered during the body from being processed.
+ :param highest_level: the maximum logging level in use.
+ This would only need to be changed if a custom level greater than CRITICAL is defined.
+ """
+ previous_level = logging.root.manager.disable
+ logging.disable(highest_level)
+ try:
+ yield
+ finally:
+ logging.disable(previous_level)
diff --git a/utils/loss.py b/utils/loss.py
new file mode 100644
index 00000000000..29aac3191c1
--- /dev/null
+++ b/utils/loss.py
@@ -0,0 +1,223 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Loss functions
+"""
+
+import torch
+import torch.nn as nn
+
+from utils.metrics import bbox_iou
+from utils.torch_utils import is_parallel
+
+
+def smooth_BCE(eps=0.1): # https://github.com/ultralytics/yolov3/issues/238#issuecomment-598028441
+ # return positive, negative label smoothing BCE targets
+ return 1.0 - 0.5 * eps, 0.5 * eps
+
+
+class BCEBlurWithLogitsLoss(nn.Module):
+ # BCEwithLogitLoss() with reduced missing label effects.
+ def __init__(self, alpha=0.05):
+ super(BCEBlurWithLogitsLoss, self).__init__()
+ self.loss_fcn = nn.BCEWithLogitsLoss(reduction='none') # must be nn.BCEWithLogitsLoss()
+ self.alpha = alpha
+
+ def forward(self, pred, true):
+ loss = self.loss_fcn(pred, true)
+ pred = torch.sigmoid(pred) # prob from logits
+ dx = pred - true # reduce only missing label effects
+ # dx = (pred - true).abs() # reduce missing label and false label effects
+ alpha_factor = 1 - torch.exp((dx - 1) / (self.alpha + 1e-4))
+ loss *= alpha_factor
+ return loss.mean()
+
+
+class FocalLoss(nn.Module):
+ # Wraps focal loss around existing loss_fcn(), i.e. criteria = FocalLoss(nn.BCEWithLogitsLoss(), gamma=1.5)
+ def __init__(self, loss_fcn, gamma=1.5, alpha=0.25):
+ super(FocalLoss, self).__init__()
+ self.loss_fcn = loss_fcn # must be nn.BCEWithLogitsLoss()
+ self.gamma = gamma
+ self.alpha = alpha
+ self.reduction = loss_fcn.reduction
+ self.loss_fcn.reduction = 'none' # required to apply FL to each element
+
+ def forward(self, pred, true):
+ loss = self.loss_fcn(pred, true)
+ # p_t = torch.exp(-loss)
+ # loss *= self.alpha * (1.000001 - p_t) ** self.gamma # non-zero power for gradient stability
+
+ # TF implementation https://github.com/tensorflow/addons/blob/v0.7.1/tensorflow_addons/losses/focal_loss.py
+ pred_prob = torch.sigmoid(pred) # prob from logits
+ p_t = true * pred_prob + (1 - true) * (1 - pred_prob)
+ alpha_factor = true * self.alpha + (1 - true) * (1 - self.alpha)
+ modulating_factor = (1.0 - p_t) ** self.gamma
+ loss *= alpha_factor * modulating_factor
+
+ if self.reduction == 'mean':
+ return loss.mean()
+ elif self.reduction == 'sum':
+ return loss.sum()
+ else: # 'none'
+ return loss
+
+
+class QFocalLoss(nn.Module):
+ # Wraps Quality focal loss around existing loss_fcn(), i.e. criteria = FocalLoss(nn.BCEWithLogitsLoss(), gamma=1.5)
+ def __init__(self, loss_fcn, gamma=1.5, alpha=0.25):
+ super(QFocalLoss, self).__init__()
+ self.loss_fcn = loss_fcn # must be nn.BCEWithLogitsLoss()
+ self.gamma = gamma
+ self.alpha = alpha
+ self.reduction = loss_fcn.reduction
+ self.loss_fcn.reduction = 'none' # required to apply FL to each element
+
+ def forward(self, pred, true):
+ loss = self.loss_fcn(pred, true)
+
+ pred_prob = torch.sigmoid(pred) # prob from logits
+ alpha_factor = true * self.alpha + (1 - true) * (1 - self.alpha)
+ modulating_factor = torch.abs(true - pred_prob) ** self.gamma
+ loss *= alpha_factor * modulating_factor
+
+ if self.reduction == 'mean':
+ return loss.mean()
+ elif self.reduction == 'sum':
+ return loss.sum()
+ else: # 'none'
+ return loss
+
+
+class ComputeLoss:
+ # Compute losses
+ def __init__(self, model, autobalance=False):
+ super(ComputeLoss, self).__init__()
+ self.sort_obj_iou = False
+ device = next(model.parameters()).device # get model device
+ h = model.hyp # hyperparameters
+
+ # Define criteria
+ BCEcls = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['cls_pw']], device=device))
+ BCEobj = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['obj_pw']], device=device))
+
+ # Class label smoothing https://arxiv.org/pdf/1902.04103.pdf eqn 3
+ self.cp, self.cn = smooth_BCE(eps=h.get('label_smoothing', 0.0)) # positive, negative BCE targets
+
+ # Focal loss
+ g = h['fl_gamma'] # focal loss gamma
+ if g > 0:
+ BCEcls, BCEobj = FocalLoss(BCEcls, g), FocalLoss(BCEobj, g)
+
+ det = model.module.model[-1] if is_parallel(model) else model.model[-1] # Detect() module
+ self.balance = {3: [4.0, 1.0, 0.4]}.get(det.nl, [4.0, 1.0, 0.25, 0.06, .02]) # P3-P7
+ self.ssi = list(det.stride).index(16) if autobalance else 0 # stride 16 index
+ self.BCEcls, self.BCEobj, self.gr, self.hyp, self.autobalance = BCEcls, BCEobj, 1.0, h, autobalance
+ for k in 'na', 'nc', 'nl', 'anchors':
+ setattr(self, k, getattr(det, k))
+
+ def __call__(self, p, targets): # predictions, targets, model
+ device = targets.device
+ lcls, lbox, lobj = torch.zeros(1, device=device), torch.zeros(1, device=device), torch.zeros(1, device=device)
+ tcls, tbox, indices, anchors = self.build_targets(p, targets) # targets
+
+ # Losses
+ for i, pi in enumerate(p): # layer index, layer predictions
+ b, a, gj, gi = indices[i] # image, anchor, gridy, gridx
+ tobj = torch.zeros_like(pi[..., 0], device=device) # target obj
+
+ n = b.shape[0] # number of targets
+ if n:
+ ps = pi[b, a, gj, gi] # prediction subset corresponding to targets
+
+ # Regression
+ pxy = ps[:, :2].sigmoid() * 2. - 0.5
+ pwh = (ps[:, 2:4].sigmoid() * 2) ** 2 * anchors[i]
+ pbox = torch.cat((pxy, pwh), 1) # predicted box
+ iou = bbox_iou(pbox.T, tbox[i], x1y1x2y2=False, CIoU=True) # iou(prediction, target)
+ lbox += (1.0 - iou).mean() # iou loss
+
+ # Objectness
+ score_iou = iou.detach().clamp(0).type(tobj.dtype)
+ if self.sort_obj_iou:
+ sort_id = torch.argsort(score_iou)
+ b, a, gj, gi, score_iou = b[sort_id], a[sort_id], gj[sort_id], gi[sort_id], score_iou[sort_id]
+ tobj[b, a, gj, gi] = (1.0 - self.gr) + self.gr * score_iou # iou ratio
+
+ # Classification
+ if self.nc > 1: # cls loss (only if multiple classes)
+ t = torch.full_like(ps[:, 5:], self.cn, device=device) # targets
+ t[range(n), tcls[i]] = self.cp
+ lcls += self.BCEcls(ps[:, 5:], t) # BCE
+
+ # Append targets to text file
+ # with open('targets.txt', 'a') as file:
+ # [file.write('%11.5g ' * 4 % tuple(x) + '\n') for x in torch.cat((txy[i], twh[i]), 1)]
+
+ obji = self.BCEobj(pi[..., 4], tobj)
+ lobj += obji * self.balance[i] # obj loss
+ if self.autobalance:
+ self.balance[i] = self.balance[i] * 0.9999 + 0.0001 / obji.detach().item()
+
+ if self.autobalance:
+ self.balance = [x / self.balance[self.ssi] for x in self.balance]
+ lbox *= self.hyp['box']
+ lobj *= self.hyp['obj']
+ lcls *= self.hyp['cls']
+ bs = tobj.shape[0] # batch size
+
+ return (lbox + lobj + lcls) * bs, torch.cat((lbox, lobj, lcls)).detach()
+
+ def build_targets(self, p, targets):
+ # Build targets for compute_loss(), input targets(image,class,x,y,w,h)
+ na, nt = self.na, targets.shape[0] # number of anchors, targets
+ tcls, tbox, indices, anch = [], [], [], []
+ gain = torch.ones(7, device=targets.device) # normalized to gridspace gain
+ ai = torch.arange(na, device=targets.device).float().view(na, 1).repeat(1, nt) # same as .repeat_interleave(nt)
+ targets = torch.cat((targets.repeat(na, 1, 1), ai[:, :, None]), 2) # append anchor indices
+
+ g = 0.5 # bias
+ off = torch.tensor([[0, 0],
+ [1, 0], [0, 1], [-1, 0], [0, -1], # j,k,l,m
+ # [1, 1], [1, -1], [-1, 1], [-1, -1], # jk,jm,lk,lm
+ ], device=targets.device).float() * g # offsets
+
+ for i in range(self.nl):
+ anchors = self.anchors[i]
+ gain[2:6] = torch.tensor(p[i].shape)[[3, 2, 3, 2]] # xyxy gain
+
+ # Match targets to anchors
+ t = targets * gain
+ if nt:
+ # Matches
+ r = t[:, :, 4:6] / anchors[:, None] # wh ratio
+ j = torch.max(r, 1. / r).max(2)[0] < self.hyp['anchor_t'] # compare
+ # j = wh_iou(anchors, t[:, 4:6]) > model.hyp['iou_t'] # iou(3,n)=wh_iou(anchors(3,2), gwh(n,2))
+ t = t[j] # filter
+
+ # Offsets
+ gxy = t[:, 2:4] # grid xy
+ gxi = gain[[2, 3]] - gxy # inverse
+ j, k = ((gxy % 1. < g) & (gxy > 1.)).T
+ l, m = ((gxi % 1. < g) & (gxi > 1.)).T
+ j = torch.stack((torch.ones_like(j), j, k, l, m))
+ t = t.repeat((5, 1, 1))[j]
+ offsets = (torch.zeros_like(gxy)[None] + off[:, None])[j]
+ else:
+ t = targets[0]
+ offsets = 0
+
+ # Define
+ b, c = t[:, :2].long().T # image, class
+ gxy = t[:, 2:4] # grid xy
+ gwh = t[:, 4:6] # grid wh
+ gij = (gxy - offsets).long()
+ gi, gj = gij.T # grid xy indices
+
+ # Append
+ a = t[:, 6].long() # anchor indices
+ indices.append((b, a, gj.clamp_(0, gain[3] - 1), gi.clamp_(0, gain[2] - 1))) # image, anchor, grid indices
+ tbox.append(torch.cat((gxy - gij, gwh), 1)) # box
+ anch.append(anchors[a]) # anchors
+ tcls.append(c) # class
+
+ return tcls, tbox, indices, anch
diff --git a/utils/metrics.py b/utils/metrics.py
new file mode 100644
index 00000000000..4f1b5e2d2c2
--- /dev/null
+++ b/utils/metrics.py
@@ -0,0 +1,333 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Model validation metrics
+"""
+
+import math
+import warnings
+from pathlib import Path
+
+import matplotlib.pyplot as plt
+import numpy as np
+import torch
+
+
+def fitness(x):
+ # Model fitness as a weighted combination of metrics
+ w = [0.0, 0.0, 0.1, 0.9] # weights for [P, R, mAP@0.5, mAP@0.5:0.95]
+ return (x[:, :4] * w).sum(1)
+
+
+def ap_per_class(tp, conf, pred_cls, target_cls, plot=False, save_dir='.', names=()):
+ """ Compute the average precision, given the recall and precision curves.
+ Source: https://github.com/rafaelpadilla/Object-Detection-Metrics.
+ # Arguments
+ tp: True positives (nparray, nx1 or nx10).
+ conf: Objectness value from 0-1 (nparray).
+ pred_cls: Predicted object classes (nparray).
+ target_cls: True object classes (nparray).
+ plot: Plot precision-recall curve at mAP@0.5
+ save_dir: Plot save directory
+ # Returns
+ The average precision as computed in py-faster-rcnn.
+ """
+
+ # Sort by objectness
+ i = np.argsort(-conf)
+ tp, conf, pred_cls = tp[i], conf[i], pred_cls[i]
+
+ # Find unique classes
+ unique_classes = np.unique(target_cls)
+ nc = unique_classes.shape[0] # number of classes, number of detections
+
+ # Create Precision-Recall curve and compute AP for each class
+ px, py = np.linspace(0, 1, 1000), [] # for plotting
+ ap, p, r = np.zeros((nc, tp.shape[1])), np.zeros((nc, 1000)), np.zeros((nc, 1000))
+ for ci, c in enumerate(unique_classes):
+ i = pred_cls == c
+ n_l = (target_cls == c).sum() # number of labels
+ n_p = i.sum() # number of predictions
+
+ if n_p == 0 or n_l == 0:
+ continue
+ else:
+ # Accumulate FPs and TPs
+ fpc = (1 - tp[i]).cumsum(0)
+ tpc = tp[i].cumsum(0)
+
+ # Recall
+ recall = tpc / (n_l + 1e-16) # recall curve
+ r[ci] = np.interp(-px, -conf[i], recall[:, 0], left=0) # negative x, xp because xp decreases
+
+ # Precision
+ precision = tpc / (tpc + fpc) # precision curve
+ p[ci] = np.interp(-px, -conf[i], precision[:, 0], left=1) # p at pr_score
+
+ # AP from recall-precision curve
+ for j in range(tp.shape[1]):
+ ap[ci, j], mpre, mrec = compute_ap(recall[:, j], precision[:, j])
+ if plot and j == 0:
+ py.append(np.interp(px, mrec, mpre)) # precision at mAP@0.5
+
+ # Compute F1 (harmonic mean of precision and recall)
+ f1 = 2 * p * r / (p + r + 1e-16)
+ if plot:
+ plot_pr_curve(px, py, ap, Path(save_dir) / 'PR_curve.png', names)
+ plot_mc_curve(px, f1, Path(save_dir) / 'F1_curve.png', names, ylabel='F1')
+ plot_mc_curve(px, p, Path(save_dir) / 'P_curve.png', names, ylabel='Precision')
+ plot_mc_curve(px, r, Path(save_dir) / 'R_curve.png', names, ylabel='Recall')
+
+ i = f1.mean(0).argmax() # max F1 index
+ return p[:, i], r[:, i], ap, f1[:, i], unique_classes.astype('int32')
+
+
+def compute_ap(recall, precision):
+ """ Compute the average precision, given the recall and precision curves
+ # Arguments
+ recall: The recall curve (list)
+ precision: The precision curve (list)
+ # Returns
+ Average precision, precision curve, recall curve
+ """
+
+ # Append sentinel values to beginning and end
+ mrec = np.concatenate(([0.0], recall, [1.0]))
+ mpre = np.concatenate(([1.0], precision, [0.0]))
+
+ # Compute the precision envelope
+ mpre = np.flip(np.maximum.accumulate(np.flip(mpre)))
+
+ # Integrate area under curve
+ method = 'interp' # methods: 'continuous', 'interp'
+ if method == 'interp':
+ x = np.linspace(0, 1, 101) # 101-point interp (COCO)
+ ap = np.trapz(np.interp(x, mrec, mpre), x) # integrate
+ else: # 'continuous'
+ i = np.where(mrec[1:] != mrec[:-1])[0] # points where x axis (recall) changes
+ ap = np.sum((mrec[i + 1] - mrec[i]) * mpre[i + 1]) # area under curve
+
+ return ap, mpre, mrec
+
+
+class ConfusionMatrix:
+ # Updated version of https://github.com/kaanakan/object_detection_confusion_matrix
+ def __init__(self, nc, conf=0.25, iou_thres=0.45):
+ self.matrix = np.zeros((nc + 1, nc + 1))
+ self.nc = nc # number of classes
+ self.conf = conf
+ self.iou_thres = iou_thres
+
+ def process_batch(self, detections, labels):
+ """
+ Return intersection-over-union (Jaccard index) of boxes.
+ Both sets of boxes are expected to be in (x1, y1, x2, y2) format.
+ Arguments:
+ detections (Array[N, 6]), x1, y1, x2, y2, conf, class
+ labels (Array[M, 5]), class, x1, y1, x2, y2
+ Returns:
+ None, updates confusion matrix accordingly
+ """
+ detections = detections[detections[:, 4] > self.conf]
+ gt_classes = labels[:, 0].int()
+ detection_classes = detections[:, 5].int()
+ iou = box_iou(labels[:, 1:], detections[:, :4])
+
+ x = torch.where(iou > self.iou_thres)
+ if x[0].shape[0]:
+ matches = torch.cat((torch.stack(x, 1), iou[x[0], x[1]][:, None]), 1).cpu().numpy()
+ if x[0].shape[0] > 1:
+ matches = matches[matches[:, 2].argsort()[::-1]]
+ matches = matches[np.unique(matches[:, 1], return_index=True)[1]]
+ matches = matches[matches[:, 2].argsort()[::-1]]
+ matches = matches[np.unique(matches[:, 0], return_index=True)[1]]
+ else:
+ matches = np.zeros((0, 3))
+
+ n = matches.shape[0] > 0
+ m0, m1, _ = matches.transpose().astype(np.int16)
+ for i, gc in enumerate(gt_classes):
+ j = m0 == i
+ if n and sum(j) == 1:
+ self.matrix[detection_classes[m1[j]], gc] += 1 # correct
+ else:
+ self.matrix[self.nc, gc] += 1 # background FP
+
+ if n:
+ for i, dc in enumerate(detection_classes):
+ if not any(m1 == i):
+ self.matrix[dc, self.nc] += 1 # background FN
+
+ def matrix(self):
+ return self.matrix
+
+ def plot(self, normalize=True, save_dir='', names=()):
+ try:
+ import seaborn as sn
+
+ array = self.matrix / ((self.matrix.sum(0).reshape(1, -1) + 1E-6) if normalize else 1) # normalize columns
+ array[array < 0.005] = np.nan # don't annotate (would appear as 0.00)
+
+ fig = plt.figure(figsize=(12, 9), tight_layout=True)
+ sn.set(font_scale=1.0 if self.nc < 50 else 0.8) # for label size
+ labels = (0 < len(names) < 99) and len(names) == self.nc # apply names to ticklabels
+ with warnings.catch_warnings():
+ warnings.simplefilter('ignore') # suppress empty matrix RuntimeWarning: All-NaN slice encountered
+ sn.heatmap(array, annot=self.nc < 30, annot_kws={"size": 8}, cmap='Blues', fmt='.2f', square=True,
+ xticklabels=names + ['background FP'] if labels else "auto",
+ yticklabels=names + ['background FN'] if labels else "auto").set_facecolor((1, 1, 1))
+ fig.axes[0].set_xlabel('True')
+ fig.axes[0].set_ylabel('Predicted')
+ fig.savefig(Path(save_dir) / 'confusion_matrix.png', dpi=250)
+ plt.close()
+ except Exception as e:
+ print(f'WARNING: ConfusionMatrix plot failure: {e}')
+
+ def print(self):
+ for i in range(self.nc + 1):
+ print(' '.join(map(str, self.matrix[i])))
+
+
+def bbox_iou(box1, box2, x1y1x2y2=True, GIoU=False, DIoU=False, CIoU=False, eps=1e-7):
+ # Returns the IoU of box1 to box2. box1 is 4, box2 is nx4
+ box2 = box2.T
+
+ # Get the coordinates of bounding boxes
+ if x1y1x2y2: # x1, y1, x2, y2 = box1
+ b1_x1, b1_y1, b1_x2, b1_y2 = box1[0], box1[1], box1[2], box1[3]
+ b2_x1, b2_y1, b2_x2, b2_y2 = box2[0], box2[1], box2[2], box2[3]
+ else: # transform from xywh to xyxy
+ b1_x1, b1_x2 = box1[0] - box1[2] / 2, box1[0] + box1[2] / 2
+ b1_y1, b1_y2 = box1[1] - box1[3] / 2, box1[1] + box1[3] / 2
+ b2_x1, b2_x2 = box2[0] - box2[2] / 2, box2[0] + box2[2] / 2
+ b2_y1, b2_y2 = box2[1] - box2[3] / 2, box2[1] + box2[3] / 2
+
+ # Intersection area
+ inter = (torch.min(b1_x2, b2_x2) - torch.max(b1_x1, b2_x1)).clamp(0) * \
+ (torch.min(b1_y2, b2_y2) - torch.max(b1_y1, b2_y1)).clamp(0)
+
+ # Union Area
+ w1, h1 = b1_x2 - b1_x1, b1_y2 - b1_y1 + eps
+ w2, h2 = b2_x2 - b2_x1, b2_y2 - b2_y1 + eps
+ union = w1 * h1 + w2 * h2 - inter + eps
+
+ iou = inter / union
+ if GIoU or DIoU or CIoU:
+ cw = torch.max(b1_x2, b2_x2) - torch.min(b1_x1, b2_x1) # convex (smallest enclosing box) width
+ ch = torch.max(b1_y2, b2_y2) - torch.min(b1_y1, b2_y1) # convex height
+ if CIoU or DIoU: # Distance or Complete IoU https://arxiv.org/abs/1911.08287v1
+ c2 = cw ** 2 + ch ** 2 + eps # convex diagonal squared
+ rho2 = ((b2_x1 + b2_x2 - b1_x1 - b1_x2) ** 2 +
+ (b2_y1 + b2_y2 - b1_y1 - b1_y2) ** 2) / 4 # center distance squared
+ if DIoU:
+ return iou - rho2 / c2 # DIoU
+ elif CIoU: # https://github.com/Zzh-tju/DIoU-SSD-pytorch/blob/master/utils/box/box_utils.py#L47
+ v = (4 / math.pi ** 2) * torch.pow(torch.atan(w2 / h2) - torch.atan(w1 / h1), 2)
+ with torch.no_grad():
+ alpha = v / (v - iou + (1 + eps))
+ return iou - (rho2 / c2 + v * alpha) # CIoU
+ else: # GIoU https://arxiv.org/pdf/1902.09630.pdf
+ c_area = cw * ch + eps # convex area
+ return iou - (c_area - union) / c_area # GIoU
+ else:
+ return iou # IoU
+
+
+def box_iou(box1, box2):
+ # https://github.com/pytorch/vision/blob/master/torchvision/ops/boxes.py
+ """
+ Return intersection-over-union (Jaccard index) of boxes.
+ Both sets of boxes are expected to be in (x1, y1, x2, y2) format.
+ Arguments:
+ box1 (Tensor[N, 4])
+ box2 (Tensor[M, 4])
+ Returns:
+ iou (Tensor[N, M]): the NxM matrix containing the pairwise
+ IoU values for every element in boxes1 and boxes2
+ """
+
+ def box_area(box):
+ # box = 4xn
+ return (box[2] - box[0]) * (box[3] - box[1])
+
+ area1 = box_area(box1.T)
+ area2 = box_area(box2.T)
+
+ # inter(N,M) = (rb(N,M,2) - lt(N,M,2)).clamp(0).prod(2)
+ inter = (torch.min(box1[:, None, 2:], box2[:, 2:]) - torch.max(box1[:, None, :2], box2[:, :2])).clamp(0).prod(2)
+ return inter / (area1[:, None] + area2 - inter) # iou = inter / (area1 + area2 - inter)
+
+
+def bbox_ioa(box1, box2, eps=1E-7):
+ """ Returns the intersection over box2 area given box1, box2. Boxes are x1y1x2y2
+ box1: np.array of shape(4)
+ box2: np.array of shape(nx4)
+ returns: np.array of shape(n)
+ """
+
+ box2 = box2.transpose()
+
+ # Get the coordinates of bounding boxes
+ b1_x1, b1_y1, b1_x2, b1_y2 = box1[0], box1[1], box1[2], box1[3]
+ b2_x1, b2_y1, b2_x2, b2_y2 = box2[0], box2[1], box2[2], box2[3]
+
+ # Intersection area
+ inter_area = (np.minimum(b1_x2, b2_x2) - np.maximum(b1_x1, b2_x1)).clip(0) * \
+ (np.minimum(b1_y2, b2_y2) - np.maximum(b1_y1, b2_y1)).clip(0)
+
+ # box2 area
+ box2_area = (b2_x2 - b2_x1) * (b2_y2 - b2_y1) + eps
+
+ # Intersection over box2 area
+ return inter_area / box2_area
+
+
+def wh_iou(wh1, wh2):
+ # Returns the nxm IoU matrix. wh1 is nx2, wh2 is mx2
+ wh1 = wh1[:, None] # [N,1,2]
+ wh2 = wh2[None] # [1,M,2]
+ inter = torch.min(wh1, wh2).prod(2) # [N,M]
+ return inter / (wh1.prod(2) + wh2.prod(2) - inter) # iou = inter / (area1 + area2 - inter)
+
+
+# Plots ----------------------------------------------------------------------------------------------------------------
+
+def plot_pr_curve(px, py, ap, save_dir='pr_curve.png', names=()):
+ # Precision-recall curve
+ fig, ax = plt.subplots(1, 1, figsize=(9, 6), tight_layout=True)
+ py = np.stack(py, axis=1)
+
+ if 0 < len(names) < 21: # display per-class legend if < 21 classes
+ for i, y in enumerate(py.T):
+ ax.plot(px, y, linewidth=1, label=f'{names[i]} {ap[i, 0]:.3f}') # plot(recall, precision)
+ else:
+ ax.plot(px, py, linewidth=1, color='grey') # plot(recall, precision)
+
+ ax.plot(px, py.mean(1), linewidth=3, color='blue', label='all classes %.3f mAP@0.5' % ap[:, 0].mean())
+ ax.set_xlabel('Recall')
+ ax.set_ylabel('Precision')
+ ax.set_xlim(0, 1)
+ ax.set_ylim(0, 1)
+ plt.legend(bbox_to_anchor=(1.04, 1), loc="upper left")
+ fig.savefig(Path(save_dir), dpi=250)
+ plt.close()
+
+
+def plot_mc_curve(px, py, save_dir='mc_curve.png', names=(), xlabel='Confidence', ylabel='Metric'):
+ # Metric-confidence curve
+ fig, ax = plt.subplots(1, 1, figsize=(9, 6), tight_layout=True)
+
+ if 0 < len(names) < 21: # display per-class legend if < 21 classes
+ for i, y in enumerate(py):
+ ax.plot(px, y, linewidth=1, label=f'{names[i]}') # plot(confidence, metric)
+ else:
+ ax.plot(px, py.T, linewidth=1, color='grey') # plot(confidence, metric)
+
+ y = py.mean(0)
+ ax.plot(px, y, linewidth=3, color='blue', label=f'all classes {y.max():.2f} at {px[y.argmax()]:.3f}')
+ ax.set_xlabel(xlabel)
+ ax.set_ylabel(ylabel)
+ ax.set_xlim(0, 1)
+ ax.set_ylim(0, 1)
+ plt.legend(bbox_to_anchor=(1.04, 1), loc="upper left")
+ fig.savefig(Path(save_dir), dpi=250)
+ plt.close()
diff --git a/utils/plots.py b/utils/plots.py
new file mode 100644
index 00000000000..d8a561a71dc
--- /dev/null
+++ b/utils/plots.py
@@ -0,0 +1,437 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Plotting utils
+"""
+
+import math
+from copy import copy
+from pathlib import Path
+
+import cv2
+import matplotlib
+import matplotlib.pyplot as plt
+import numpy as np
+import pandas as pd
+import seaborn as sn
+import torch
+from PIL import Image, ImageDraw, ImageFont
+
+from utils.general import is_ascii, xyxy2xywh, xywh2xyxy
+from utils.metrics import fitness
+
+# Settings
+matplotlib.rc('font', **{'size': 11})
+matplotlib.use('Agg') # for writing to files only
+
+FILE = Path(__file__).absolute()
+ROOT = FILE.parents[1] # yolov5/ dir
+
+
+class Colors:
+ # Ultralytics color palette https://ultralytics.com/
+ def __init__(self):
+ # hex = matplotlib.colors.TABLEAU_COLORS.values()
+ hex = ('FF3838', 'FF9D97', 'FF701F', 'FFB21D', 'CFD231', '48F90A', '92CC17', '3DDB86', '1A9334', '00D4BB',
+ '2C99A8', '00C2FF', '344593', '6473FF', '0018EC', '8438FF', '520085', 'CB38FF', 'FF95C8', 'FF37C7')
+ self.palette = [self.hex2rgb('#' + c) for c in hex]
+ self.n = len(self.palette)
+
+ def __call__(self, i, bgr=False):
+ c = self.palette[int(i) % self.n]
+ return (c[2], c[1], c[0]) if bgr else c
+
+ @staticmethod
+ def hex2rgb(h): # rgb order (PIL)
+ return tuple(int(h[1 + i:1 + i + 2], 16) for i in (0, 2, 4))
+
+
+colors = Colors() # create instance for 'from utils.plots import colors'
+
+
+def check_font(font='Arial.ttf', size=10):
+ # Return a PIL TrueType Font, downloading to ROOT dir if necessary
+ font = Path(font)
+ font = font if font.exists() else (ROOT / font.name)
+ try:
+ return ImageFont.truetype(str(font) if font.exists() else font.name, size)
+ except Exception as e: # download if missing
+ url = "https://ultralytics.com/assets/" + font.name
+ print(f'Downloading {url} to {font}...')
+ torch.hub.download_url_to_file(url, str(font))
+ return ImageFont.truetype(str(font), size)
+
+
+class Annotator:
+ check_font() # download TTF if necessary
+
+ # YOLOv5 Annotator for train/val mosaics and jpgs and detect/hub inference annotations
+ def __init__(self, im, line_width=None, font_size=None, font='Arial.ttf', pil=True):
+ assert im.data.contiguous, 'Image not contiguous. Apply np.ascontiguousarray(im) to Annotator() input images.'
+ self.pil = pil
+ if self.pil: # use PIL
+ self.im = im if isinstance(im, Image.Image) else Image.fromarray(im)
+ self.draw = ImageDraw.Draw(self.im)
+ self.font = check_font(font, size=font_size or max(round(sum(self.im.size) / 2 * 0.035), 12))
+ self.fh = self.font.getsize('a')[1] - 3 # font height
+ else: # use cv2
+ self.im = im
+ self.lw = line_width or max(round(sum(im.shape) / 2 * 0.003), 2) # line width
+
+ def box_label(self, box, label='', color=(128, 128, 128), txt_color=(255, 255, 255)):
+ # Add one xyxy box to image with label
+ if self.pil or not is_ascii(label):
+ self.draw.rectangle(box, width=self.lw, outline=color) # box
+ if label:
+ w = self.font.getsize(label)[0] # text width
+ self.draw.rectangle([box[0], box[1] - self.fh, box[0] + w + 1, box[1] + 1], fill=color)
+ self.draw.text((box[0], box[1]), label, fill=txt_color, font=self.font, anchor='ls')
+ else: # cv2
+ c1, c2 = (int(box[0]), int(box[1])), (int(box[2]), int(box[3]))
+ cv2.rectangle(self.im, c1, c2, color, thickness=self.lw, lineType=cv2.LINE_AA)
+ if label:
+ tf = max(self.lw - 1, 1) # font thickness
+ w, h = cv2.getTextSize(label, 0, fontScale=self.lw / 3, thickness=tf)[0]
+ c2 = c1[0] + w, c1[1] - h - 3
+ cv2.rectangle(self.im, c1, c2, color, -1, cv2.LINE_AA) # filled
+ cv2.putText(self.im, label, (c1[0], c1[1] - 2), 0, self.lw / 3, txt_color, thickness=tf,
+ lineType=cv2.LINE_AA)
+
+ def rectangle(self, xy, fill=None, outline=None, width=1):
+ # Add rectangle to image (PIL-only)
+ self.draw.rectangle(xy, fill, outline, width)
+
+ def text(self, xy, text, txt_color=(255, 255, 255)):
+ # Add text to image (PIL-only)
+ w, h = self.font.getsize(text) # text width, height
+ self.draw.text((xy[0], xy[1] - h + 1), text, fill=txt_color, font=self.font)
+
+ def result(self):
+ # Return annotated image as array
+ return np.asarray(self.im)
+
+
+def hist2d(x, y, n=100):
+ # 2d histogram used in labels.png and evolve.png
+ xedges, yedges = np.linspace(x.min(), x.max(), n), np.linspace(y.min(), y.max(), n)
+ hist, xedges, yedges = np.histogram2d(x, y, (xedges, yedges))
+ xidx = np.clip(np.digitize(x, xedges) - 1, 0, hist.shape[0] - 1)
+ yidx = np.clip(np.digitize(y, yedges) - 1, 0, hist.shape[1] - 1)
+ return np.log(hist[xidx, yidx])
+
+
+def butter_lowpass_filtfilt(data, cutoff=1500, fs=50000, order=5):
+ from scipy.signal import butter, filtfilt
+
+ # https://stackoverflow.com/questions/28536191/how-to-filter-smooth-with-scipy-numpy
+ def butter_lowpass(cutoff, fs, order):
+ nyq = 0.5 * fs
+ normal_cutoff = cutoff / nyq
+ return butter(order, normal_cutoff, btype='low', analog=False)
+
+ b, a = butter_lowpass(cutoff, fs, order=order)
+ return filtfilt(b, a, data) # forward-backward filter
+
+
+def output_to_target(output):
+ # Convert model output to target format [batch_id, class_id, x, y, w, h, conf]
+ targets = []
+ for i, o in enumerate(output):
+ for *box, conf, cls in o.cpu().numpy():
+ targets.append([i, cls, *list(*xyxy2xywh(np.array(box)[None])), conf])
+ return np.array(targets)
+
+
+def plot_images(images, targets, paths=None, fname='images.jpg', names=None, max_size=1920, max_subplots=16):
+ # Plot image grid with labels
+ if isinstance(images, torch.Tensor):
+ images = images.cpu().float().numpy()
+ if isinstance(targets, torch.Tensor):
+ targets = targets.cpu().numpy()
+ if np.max(images[0]) <= 1:
+ images *= 255.0 # de-normalise (optional)
+ bs, _, h, w = images.shape # batch size, _, height, width
+ bs = min(bs, max_subplots) # limit plot images
+ ns = np.ceil(bs ** 0.5) # number of subplots (square)
+
+ # Build Image
+ mosaic = np.full((int(ns * h), int(ns * w), 3), 255, dtype=np.uint8) # init
+ for i, im in enumerate(images):
+ if i == max_subplots: # if last batch has fewer images than we expect
+ break
+ x, y = int(w * (i // ns)), int(h * (i % ns)) # block origin
+ im = im.transpose(1, 2, 0)
+ mosaic[y:y + h, x:x + w, :] = im
+
+ # Resize (optional)
+ scale = max_size / ns / max(h, w)
+ if scale < 1:
+ h = math.ceil(scale * h)
+ w = math.ceil(scale * w)
+ mosaic = cv2.resize(mosaic, tuple(int(x * ns) for x in (w, h)))
+
+ # Annotate
+ fs = int((h + w) * ns * 0.01) # font size
+ annotator = Annotator(mosaic, line_width=round(fs / 10), font_size=fs)
+ for i in range(i + 1):
+ x, y = int(w * (i // ns)), int(h * (i % ns)) # block origin
+ annotator.rectangle([x, y, x + w, y + h], None, (255, 255, 255), width=2) # borders
+ if paths:
+ annotator.text((x + 5, y + 5 + h), text=Path(paths[i]).name[:40], txt_color=(220, 220, 220)) # filenames
+ if len(targets) > 0:
+ ti = targets[targets[:, 0] == i] # image targets
+ boxes = xywh2xyxy(ti[:, 2:6]).T
+ classes = ti[:, 1].astype('int')
+ labels = ti.shape[1] == 6 # labels if no conf column
+ conf = None if labels else ti[:, 6] # check for confidence presence (label vs pred)
+
+ if boxes.shape[1]:
+ if boxes.max() <= 1.01: # if normalized with tolerance 0.01
+ boxes[[0, 2]] *= w # scale to pixels
+ boxes[[1, 3]] *= h
+ elif scale < 1: # absolute coords need scale if image scales
+ boxes *= scale
+ boxes[[0, 2]] += x
+ boxes[[1, 3]] += y
+ for j, box in enumerate(boxes.T.tolist()):
+ cls = classes[j]
+ color = colors(cls)
+ cls = names[cls] if names else cls
+ if labels or conf[j] > 0.25: # 0.25 conf thresh
+ label = f'{cls}' if labels else f'{cls} {conf[j]:.1f}'
+ annotator.box_label(box, label, color=color)
+ annotator.im.save(fname) # save
+
+
+def plot_lr_scheduler(optimizer, scheduler, epochs=300, save_dir=''):
+ # Plot LR simulating training for full epochs
+ optimizer, scheduler = copy(optimizer), copy(scheduler) # do not modify originals
+ y = []
+ for _ in range(epochs):
+ scheduler.step()
+ y.append(optimizer.param_groups[0]['lr'])
+ plt.plot(y, '.-', label='LR')
+ plt.xlabel('epoch')
+ plt.ylabel('LR')
+ plt.grid()
+ plt.xlim(0, epochs)
+ plt.ylim(0)
+ plt.savefig(Path(save_dir) / 'LR.png', dpi=200)
+ plt.close()
+
+
+def plot_val_txt(): # from utils.plots import *; plot_val()
+ # Plot val.txt histograms
+ x = np.loadtxt('val.txt', dtype=np.float32)
+ box = xyxy2xywh(x[:, :4])
+ cx, cy = box[:, 0], box[:, 1]
+
+ fig, ax = plt.subplots(1, 1, figsize=(6, 6), tight_layout=True)
+ ax.hist2d(cx, cy, bins=600, cmax=10, cmin=0)
+ ax.set_aspect('equal')
+ plt.savefig('hist2d.png', dpi=300)
+
+ fig, ax = plt.subplots(1, 2, figsize=(12, 6), tight_layout=True)
+ ax[0].hist(cx, bins=600)
+ ax[1].hist(cy, bins=600)
+ plt.savefig('hist1d.png', dpi=200)
+
+
+def plot_targets_txt(): # from utils.plots import *; plot_targets_txt()
+ # Plot targets.txt histograms
+ x = np.loadtxt('targets.txt', dtype=np.float32).T
+ s = ['x targets', 'y targets', 'width targets', 'height targets']
+ fig, ax = plt.subplots(2, 2, figsize=(8, 8), tight_layout=True)
+ ax = ax.ravel()
+ for i in range(4):
+ ax[i].hist(x[i], bins=100, label='%.3g +/- %.3g' % (x[i].mean(), x[i].std()))
+ ax[i].legend()
+ ax[i].set_title(s[i])
+ plt.savefig('targets.jpg', dpi=200)
+
+
+def plot_study_txt(path='', x=None): # from utils.plots import *; plot_study_txt()
+ # Plot study.txt generated by val.py
+ plot2 = False # plot additional results
+ if plot2:
+ ax = plt.subplots(2, 4, figsize=(10, 6), tight_layout=True)[1].ravel()
+
+ fig2, ax2 = plt.subplots(1, 1, figsize=(8, 4), tight_layout=True)
+ # for f in [Path(path) / f'study_coco_{x}.txt' for x in ['yolov5s6', 'yolov5m6', 'yolov5l6', 'yolov5x6']]:
+ for f in sorted(Path(path).glob('study*.txt')):
+ y = np.loadtxt(f, dtype=np.float32, usecols=[0, 1, 2, 3, 7, 8, 9], ndmin=2).T
+ x = np.arange(y.shape[1]) if x is None else np.array(x)
+ if plot2:
+ s = ['P', 'R', 'mAP@.5', 'mAP@.5:.95', 't_preprocess (ms/img)', 't_inference (ms/img)', 't_NMS (ms/img)']
+ for i in range(7):
+ ax[i].plot(x, y[i], '.-', linewidth=2, markersize=8)
+ ax[i].set_title(s[i])
+
+ j = y[3].argmax() + 1
+ ax2.plot(y[5, 1:j], y[3, 1:j] * 1E2, '.-', linewidth=2, markersize=8,
+ label=f.stem.replace('study_coco_', '').replace('yolo', 'YOLO'))
+
+ ax2.plot(1E3 / np.array([209, 140, 97, 58, 35, 18]), [34.6, 40.5, 43.0, 47.5, 49.7, 51.5],
+ 'k.-', linewidth=2, markersize=8, alpha=.25, label='EfficientDet')
+
+ ax2.grid(alpha=0.2)
+ ax2.set_yticks(np.arange(20, 60, 5))
+ ax2.set_xlim(0, 57)
+ ax2.set_ylim(30, 55)
+ ax2.set_xlabel('GPU Speed (ms/img)')
+ ax2.set_ylabel('COCO AP val')
+ ax2.legend(loc='lower right')
+ plt.savefig(str(Path(path).name) + '.png', dpi=300)
+
+
+def plot_labels(labels, names=(), save_dir=Path('')):
+ # plot dataset labels
+ print('Plotting labels... ')
+ c, b = labels[:, 0], labels[:, 1:].transpose() # classes, boxes
+ nc = int(c.max() + 1) # number of classes
+ x = pd.DataFrame(b.transpose(), columns=['x', 'y', 'width', 'height'])
+
+ # seaborn correlogram
+ sn.pairplot(x, corner=True, diag_kind='auto', kind='hist', diag_kws=dict(bins=50), plot_kws=dict(pmax=0.9))
+ plt.savefig(save_dir / 'labels_correlogram.jpg', dpi=200)
+ plt.close()
+
+ # matplotlib labels
+ matplotlib.use('svg') # faster
+ ax = plt.subplots(2, 2, figsize=(8, 8), tight_layout=True)[1].ravel()
+ y = ax[0].hist(c, bins=np.linspace(0, nc, nc + 1) - 0.5, rwidth=0.8)
+ # [y[2].patches[i].set_color([x / 255 for x in colors(i)]) for i in range(nc)] # update colors bug #3195
+ ax[0].set_ylabel('instances')
+ if 0 < len(names) < 30:
+ ax[0].set_xticks(range(len(names)))
+ ax[0].set_xticklabels(names, rotation=90, fontsize=10)
+ else:
+ ax[0].set_xlabel('classes')
+ sn.histplot(x, x='x', y='y', ax=ax[2], bins=50, pmax=0.9)
+ sn.histplot(x, x='width', y='height', ax=ax[3], bins=50, pmax=0.9)
+
+ # rectangles
+ labels[:, 1:3] = 0.5 # center
+ labels[:, 1:] = xywh2xyxy(labels[:, 1:]) * 2000
+ img = Image.fromarray(np.ones((2000, 2000, 3), dtype=np.uint8) * 255)
+ for cls, *box in labels[:1000]:
+ ImageDraw.Draw(img).rectangle(box, width=1, outline=colors(cls)) # plot
+ ax[1].imshow(img)
+ ax[1].axis('off')
+
+ for a in [0, 1, 2, 3]:
+ for s in ['top', 'right', 'left', 'bottom']:
+ ax[a].spines[s].set_visible(False)
+
+ plt.savefig(save_dir / 'labels.jpg', dpi=200)
+ matplotlib.use('Agg')
+ plt.close()
+
+
+def profile_idetection(start=0, stop=0, labels=(), save_dir=''):
+ # Plot iDetection '*.txt' per-image logs. from utils.plots import *; profile_idetection()
+ ax = plt.subplots(2, 4, figsize=(12, 6), tight_layout=True)[1].ravel()
+ s = ['Images', 'Free Storage (GB)', 'RAM Usage (GB)', 'Battery', 'dt_raw (ms)', 'dt_smooth (ms)', 'real-world FPS']
+ files = list(Path(save_dir).glob('frames*.txt'))
+ for fi, f in enumerate(files):
+ try:
+ results = np.loadtxt(f, ndmin=2).T[:, 90:-30] # clip first and last rows
+ n = results.shape[1] # number of rows
+ x = np.arange(start, min(stop, n) if stop else n)
+ results = results[:, x]
+ t = (results[0] - results[0].min()) # set t0=0s
+ results[0] = x
+ for i, a in enumerate(ax):
+ if i < len(results):
+ label = labels[fi] if len(labels) else f.stem.replace('frames_', '')
+ a.plot(t, results[i], marker='.', label=label, linewidth=1, markersize=5)
+ a.set_title(s[i])
+ a.set_xlabel('time (s)')
+ # if fi == len(files) - 1:
+ # a.set_ylim(bottom=0)
+ for side in ['top', 'right']:
+ a.spines[side].set_visible(False)
+ else:
+ a.remove()
+ except Exception as e:
+ print('Warning: Plotting error for %s; %s' % (f, e))
+ ax[1].legend()
+ plt.savefig(Path(save_dir) / 'idetection_profile.png', dpi=200)
+
+
+def plot_evolve(evolve_csv='path/to/evolve.csv'): # from utils.plots import *; plot_evolve()
+ # Plot evolve.csv hyp evolution results
+ evolve_csv = Path(evolve_csv)
+ data = pd.read_csv(evolve_csv)
+ keys = [x.strip() for x in data.columns]
+ x = data.values
+ f = fitness(x)
+ j = np.argmax(f) # max fitness index
+ plt.figure(figsize=(10, 12), tight_layout=True)
+ matplotlib.rc('font', **{'size': 8})
+ for i, k in enumerate(keys[7:]):
+ v = x[:, 7 + i]
+ mu = v[j] # best single result
+ plt.subplot(6, 5, i + 1)
+ plt.scatter(v, f, c=hist2d(v, f, 20), cmap='viridis', alpha=.8, edgecolors='none')
+ plt.plot(mu, f.max(), 'k+', markersize=15)
+ plt.title('%s = %.3g' % (k, mu), fontdict={'size': 9}) # limit to 40 characters
+ if i % 5 != 0:
+ plt.yticks([])
+ print('%15s: %.3g' % (k, mu))
+ f = evolve_csv.with_suffix('.png') # filename
+ plt.savefig(f, dpi=200)
+ plt.close()
+ print(f'Saved {f}')
+
+
+def plot_results(file='path/to/results.csv', dir=''):
+ # Plot training results.csv. Usage: from utils.plots import *; plot_results('path/to/results.csv')
+ save_dir = Path(file).parent if file else Path(dir)
+ fig, ax = plt.subplots(2, 5, figsize=(12, 6), tight_layout=True)
+ ax = ax.ravel()
+ files = list(save_dir.glob('results*.csv'))
+ assert len(files), f'No results.csv files found in {save_dir.resolve()}, nothing to plot.'
+ for fi, f in enumerate(files):
+ try:
+ data = pd.read_csv(f)
+ s = [x.strip() for x in data.columns]
+ x = data.values[:, 0]
+ for i, j in enumerate([1, 2, 3, 4, 5, 8, 9, 10, 6, 7]):
+ y = data.values[:, j]
+ # y[y == 0] = np.nan # don't show zero values
+ ax[i].plot(x, y, marker='.', label=f.stem, linewidth=2, markersize=8)
+ ax[i].set_title(s[j], fontsize=12)
+ # if j in [8, 9, 10]: # share train and val loss y axes
+ # ax[i].get_shared_y_axes().join(ax[i], ax[i - 5])
+ except Exception as e:
+ print(f'Warning: Plotting error for {f}: {e}')
+ ax[1].legend()
+ fig.savefig(save_dir / 'results.png', dpi=200)
+ plt.close()
+
+
+def feature_visualization(x, module_type, stage, n=32, save_dir=Path('runs/detect/exp')):
+ """
+ x: Features to be visualized
+ module_type: Module type
+ stage: Module stage within model
+ n: Maximum number of feature maps to plot
+ save_dir: Directory to save results
+ """
+ if 'Detect' not in module_type:
+ batch, channels, height, width = x.shape # batch, channels, height, width
+ if height > 1 and width > 1:
+ f = f"stage{stage}_{module_type.split('.')[-1]}_features.png" # filename
+
+ blocks = torch.chunk(x[0].cpu(), channels, dim=0) # select batch index 0, block by channels
+ n = min(n, channels) # number of plots
+ fig, ax = plt.subplots(math.ceil(n / 8), 8, tight_layout=True) # 8 rows x n/8 cols
+ ax = ax.ravel()
+ plt.subplots_adjust(wspace=0.05, hspace=0.05)
+ for i in range(n):
+ ax[i].imshow(blocks[i].squeeze()) # cmap='gray'
+ ax[i].axis('off')
+
+ print(f'Saving {save_dir / f}... ({n}/{channels})')
+ plt.savefig(save_dir / f, dpi=300, bbox_inches='tight')
+ plt.close()
diff --git a/utils/torch_utils.py b/utils/torch_utils.py
index 25eff07f3f4..2e153921eb1 100644
--- a/utils/torch_utils.py
+++ b/utils/torch_utils.py
@@ -1,66 +1,168 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+PyTorch utils
+"""
+
+import datetime
import logging
+import math
import os
+import platform
+import subprocess
import time
+from contextlib import contextmanager
from copy import deepcopy
+from pathlib import Path
-import math
import torch
import torch.backends.cudnn as cudnn
+import torch.distributed as dist
import torch.nn as nn
import torch.nn.functional as F
import torchvision
-logger = logging.getLogger(__name__)
+try:
+ import thop # for FLOPs computation
+except ImportError:
+ thop = None
+LOGGER = logging.getLogger(__name__)
-def init_torch_seeds(seed=0):
- torch.manual_seed(seed)
+@contextmanager
+def torch_distributed_zero_first(local_rank: int):
+ """
+ Decorator to make all processes in distributed training wait for each local_master to do something.
+ """
+ if local_rank not in [-1, 0]:
+ dist.barrier(device_ids=[local_rank])
+ yield
+ if local_rank == 0:
+ dist.barrier(device_ids=[0])
+
+
+def init_torch_seeds(seed=0):
# Speed-reproducibility tradeoff https://pytorch.org/docs/stable/notes/randomness.html
+ torch.manual_seed(seed)
if seed == 0: # slower, more reproducible
- cudnn.deterministic = True
- cudnn.benchmark = False
+ cudnn.benchmark, cudnn.deterministic = False, True
else: # faster, less reproducible
- cudnn.deterministic = False
- cudnn.benchmark = True
+ cudnn.benchmark, cudnn.deterministic = True, False
+
+
+def date_modified(path=__file__):
+ # return human-readable file modification date, i.e. '2021-3-26'
+ t = datetime.datetime.fromtimestamp(Path(path).stat().st_mtime)
+ return f'{t.year}-{t.month}-{t.day}'
+
+
+def git_describe(path=Path(__file__).parent): # path must be a directory
+ # return human-readable git description, i.e. v5.0-5-g3e25f1e https://git-scm.com/docs/git-describe
+ s = f'git -C {path} describe --tags --long --always'
+ try:
+ return subprocess.check_output(s, shell=True, stderr=subprocess.STDOUT).decode()[:-1]
+ except subprocess.CalledProcessError as e:
+ return '' # not a git repository
def select_device(device='', batch_size=None):
# device = 'cpu' or '0' or '0,1,2,3'
- cpu_request = device.lower() == 'cpu'
- if device and not cpu_request: # if device requested other than 'cpu'
+ s = f'YOLOv5 🚀 {git_describe() or date_modified()} torch {torch.__version__} ' # string
+ device = str(device).strip().lower().replace('cuda:', '') # to string, 'cuda:0' to '0'
+ cpu = device == 'cpu'
+ if cpu:
+ os.environ['CUDA_VISIBLE_DEVICES'] = '-1' # force torch.cuda.is_available() = False
+ elif device: # non-cpu device requested
os.environ['CUDA_VISIBLE_DEVICES'] = device # set environment variable
- assert torch.cuda.is_available(), 'CUDA unavailable, invalid device %s requested' % device # check availablity
+ assert torch.cuda.is_available(), f'CUDA unavailable, invalid device {device} requested' # check availability
- cuda = False if cpu_request else torch.cuda.is_available()
+ cuda = not cpu and torch.cuda.is_available()
if cuda:
- c = 1024 ** 2 # bytes to MB
- ng = torch.cuda.device_count()
- if ng > 1 and batch_size: # check that batch_size is compatible with device_count
- assert batch_size % ng == 0, 'batch-size %g not multiple of GPU count %g' % (batch_size, ng)
- x = [torch.cuda.get_device_properties(i) for i in range(ng)]
- s = 'Using CUDA '
- for i in range(0, ng):
- if i == 1:
- s = ' ' * len(s)
- logger.info("%sdevice%g _CudaDeviceProperties(name='%s', total_memory=%dMB)" %
- (s, i, x[i].name, x[i].total_memory / c))
+ devices = device.split(',') if device else '0' # range(torch.cuda.device_count()) # i.e. 0,1,6,7
+ n = len(devices) # device count
+ if n > 1 and batch_size: # check batch_size is divisible by device_count
+ assert batch_size % n == 0, f'batch-size {batch_size} not multiple of GPU count {n}'
+ space = ' ' * (len(s) + 1)
+ for i, d in enumerate(devices):
+ p = torch.cuda.get_device_properties(i)
+ s += f"{'' if i == 0 else space}CUDA:{d} ({p.name}, {p.total_memory / 1024 ** 2}MB)\n" # bytes to MB
else:
- logger.info('Using CPU')
+ s += 'CPU\n'
- logger.info('') # skip a line
+ LOGGER.info(s.encode().decode('ascii', 'ignore') if platform.system() == 'Windows' else s) # emoji-safe
return torch.device('cuda:0' if cuda else 'cpu')
-def time_synchronized():
- torch.cuda.synchronize() if torch.cuda.is_available() else None
+def time_sync():
+ # pytorch-accurate time
+ if torch.cuda.is_available():
+ torch.cuda.synchronize()
return time.time()
+def profile(input, ops, n=10, device=None):
+ # YOLOv5 speed/memory/FLOPs profiler
+ #
+ # Usage:
+ # input = torch.randn(16, 3, 640, 640)
+ # m1 = lambda x: x * torch.sigmoid(x)
+ # m2 = nn.SiLU()
+ # profile(input, [m1, m2], n=100) # profile over 100 iterations
+
+ results = []
+ logging.basicConfig(format="%(message)s", level=logging.INFO)
+ device = device or select_device()
+ print(f"{'Params':>12s}{'GFLOPs':>12s}{'GPU_mem (GB)':>14s}{'forward (ms)':>14s}{'backward (ms)':>14s}"
+ f"{'input':>24s}{'output':>24s}")
+
+ for x in input if isinstance(input, list) else [input]:
+ x = x.to(device)
+ x.requires_grad = True
+ for m in ops if isinstance(ops, list) else [ops]:
+ m = m.to(device) if hasattr(m, 'to') else m # device
+ m = m.half() if hasattr(m, 'half') and isinstance(x, torch.Tensor) and x.dtype is torch.float16 else m
+ tf, tb, t = 0., 0., [0., 0., 0.] # dt forward, backward
+ try:
+ flops = thop.profile(m, inputs=(x,), verbose=False)[0] / 1E9 * 2 # GFLOPs
+ except:
+ flops = 0
+
+ try:
+ for _ in range(n):
+ t[0] = time_sync()
+ y = m(x)
+ t[1] = time_sync()
+ try:
+ _ = (sum([yi.sum() for yi in y]) if isinstance(y, list) else y).sum().backward()
+ t[2] = time_sync()
+ except Exception as e: # no backward method
+ print(e)
+ t[2] = float('nan')
+ tf += (t[1] - t[0]) * 1000 / n # ms per op forward
+ tb += (t[2] - t[1]) * 1000 / n # ms per op backward
+ mem = torch.cuda.memory_reserved() / 1E9 if torch.cuda.is_available() else 0 # (GB)
+ s_in = tuple(x.shape) if isinstance(x, torch.Tensor) else 'list'
+ s_out = tuple(y.shape) if isinstance(y, torch.Tensor) else 'list'
+ p = sum(list(x.numel() for x in m.parameters())) if isinstance(m, nn.Module) else 0 # parameters
+ print(f'{p:12}{flops:12.4g}{mem:>14.3f}{tf:14.4g}{tb:14.4g}{str(s_in):>24s}{str(s_out):>24s}')
+ results.append([p, flops, mem, tf, tb, s_in, s_out])
+ except Exception as e:
+ print(e)
+ results.append(None)
+ torch.cuda.empty_cache()
+ return results
+
+
def is_parallel(model):
+ # Returns True if model is of type DP or DDP
return type(model) in (nn.parallel.DataParallel, nn.parallel.DistributedDataParallel)
+def de_parallel(model):
+ # De-parallelize a model: returns single-GPU model if model is of type DP or DDP
+ return model.module if is_parallel(model) else model
+
+
def intersect_dicts(da, db, exclude=()):
# Dictionary intersection of matching keys and shapes, omitting 'exclude' keys, using da values
return {k: v for k, v in da.items() if k in db and not any(x in k for x in exclude) and v.shape == db[k].shape}
@@ -105,8 +207,6 @@ def prune(model, amount=0.3):
def fuse_conv_and_bn(conv, bn):
# Fuse convolution and batchnorm layers https://tehnokv.com/posts/fusing-batchnorm-and-conv/
-
- # init
fusedconv = nn.Conv2d(conv.in_channels,
conv.out_channels,
kernel_size=conv.kernel_size,
@@ -118,7 +218,7 @@ def fuse_conv_and_bn(conv, bn):
# prepare filters
w_conv = conv.weight.clone().view(conv.out_channels, -1)
w_bn = torch.diag(bn.weight.div(torch.sqrt(bn.eps + bn.running_var)))
- fusedconv.weight.copy_(torch.mm(w_bn, w_conv).view(fusedconv.weight.size()))
+ fusedconv.weight.copy_(torch.mm(w_bn, w_conv).view(fusedconv.weight.shape))
# prepare spatial bias
b_conv = torch.zeros(conv.weight.size(0), device=conv.weight.device) if conv.bias is None else conv.bias
@@ -128,8 +228,8 @@ def fuse_conv_and_bn(conv, bn):
return fusedconv
-def model_info(model, verbose=False):
- # Plots a line-by-line description of a PyTorch model
+def model_info(model, verbose=False, img_size=640):
+ # Model information. img_size may be int or list, i.e. img_size=640 or img_size=[640, 320]
n_p = sum(x.numel() for x in model.parameters()) # number parameters
n_g = sum(x.numel() for x in model.parameters() if x.requires_grad) # number gradients
if verbose:
@@ -139,15 +239,17 @@ def model_info(model, verbose=False):
print('%5g %40s %9s %12g %20s %10.3g %10.3g' %
(i, name, p.requires_grad, p.numel(), list(p.shape), p.mean(), p.std()))
- try: # FLOPS
+ try: # FLOPs
from thop import profile
- flops = profile(deepcopy(model), inputs=(torch.zeros(1, 3, 64, 64),), verbose=False)[0] / 1E9 * 2
- fs = ', %.1f GFLOPS' % (flops * 100) # 640x640 FLOPS
- except:
+ stride = max(int(model.stride.max()), 32) if hasattr(model, 'stride') else 32
+ img = torch.zeros((1, model.yaml.get('ch', 3), stride, stride), device=next(model.parameters()).device) # input
+ flops = profile(deepcopy(model), inputs=(img,), verbose=False)[0] / 1E9 * 2 # stride GFLOPs
+ img_size = img_size if isinstance(img_size, list) else [img_size, img_size] # expand if int/float
+ fs = ', %.1f GFLOPs' % (flops * img_size[0] / stride * img_size[1] / stride) # 640x640 GFLOPs
+ except (ImportError, Exception):
fs = ''
- logger.info(
- 'Model Summary: %g layers, %g parameters, %g gradients%s' % (len(list(model.parameters())), n_p, n_g, fs))
+ LOGGER.info(f"Model Summary: {len(list(model.modules()))} layers, {n_p} parameters, {n_g} gradients{fs}")
def load_classifier(name='resnet101', n=2):
@@ -169,8 +271,8 @@ def load_classifier(name='resnet101', n=2):
return model
-def scale_img(img, ratio=1.0, same_shape=False): # img(16,3,256,416), r=ratio
- # scales img(bs,3,y,x) by ratio
+def scale_img(img, ratio=1.0, same_shape=False, gs=32): # img(16,3,256,416)
+ # scales img(bs,3,y,x) by ratio constrained to gs-multiple
if ratio == 1.0:
return img
else:
@@ -178,7 +280,6 @@ def scale_img(img, ratio=1.0, same_shape=False): # img(16,3,256,416), r=ratio
s = (int(h * ratio), int(w * ratio)) # new size
img = F.interpolate(img, size=s, mode='bilinear', align_corners=False) # resize
if not same_shape: # pad/crop img
- gs = 32 # (pixels) grid size
h, w = [math.ceil(x * ratio / gs) * gs for x in (h, w)]
return F.pad(img, [0, w - s[1], 0, h - s[0]], value=0.447) # value = imagenet mean
@@ -192,6 +293,23 @@ def copy_attr(a, b, include=(), exclude=()):
setattr(a, k, v)
+class EarlyStopping:
+ # YOLOv5 simple early stopper
+ def __init__(self, patience=30):
+ self.best_fitness = 0.0 # i.e. mAP
+ self.best_epoch = 0
+ self.patience = patience # epochs to wait after fitness stops improving to stop
+
+ def __call__(self, epoch, fitness):
+ if fitness >= self.best_fitness: # >= 0 to allow for early zero-fitness stage of training
+ self.best_epoch = epoch
+ self.best_fitness = fitness
+ stop = (epoch - self.best_epoch) >= self.patience # stop training if patience exceeded
+ if stop:
+ LOGGER.info(f'EarlyStopping patience {self.patience} exceeded, stopping training.')
+ return stop
+
+
class ModelEMA:
""" Model Exponential Moving Average from https://github.com/rwightman/pytorch-image-models
Keep a moving average of everything in the model state_dict (parameters and buffers).
diff --git a/val.py b/val.py
new file mode 100644
index 00000000000..d521fe76638
--- /dev/null
+++ b/val.py
@@ -0,0 +1,405 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Validate a trained YOLOv5 model accuracy on a custom dataset
+
+Usage:
+ $ python path/to/val.py --data coco128.yaml --weights yolov5s.pt --img 640
+"""
+
+import argparse
+import json
+import os
+import sys
+from pathlib import Path
+from threading import Thread
+
+import numpy as np
+import torch
+from tqdm import tqdm
+
+FILE = Path(__file__).absolute()
+sys.path.append(FILE.parents[0].as_posix()) # add yolov5/ to path
+
+from models.experimental import attempt_load
+from utils.datasets import create_dataloader
+from utils.general import coco80_to_coco91_class, check_dataset, check_file, check_img_size, check_requirements, \
+ box_iou, non_max_suppression, scale_coords, xyxy2xywh, xywh2xyxy, set_logging, increment_path, colorstr
+from utils.metrics import ap_per_class, ConfusionMatrix
+from utils.plots import plot_images, output_to_target, plot_study_txt
+from utils.torch_utils import select_device, time_sync
+from utils.callbacks import Callbacks
+
+from aisa_utils.dl_utils.utils import plot_object_count_difference_ridgeline, make_video_results
+
+
+def save_one_txt(predn, save_conf, shape, file):
+ # Save one txt result
+ gn = torch.tensor(shape)[[1, 0, 1, 0]] # normalization gain whwh
+ for *xyxy, conf, cls in predn.tolist():
+ xywh = (xyxy2xywh(torch.tensor(xyxy).view(1, 4)) / gn).view(-1).tolist() # normalized xywh
+ line = (cls, *xywh, conf) if save_conf else (cls, *xywh) # label format
+ with open(file, 'a') as f:
+ f.write(('%g ' * len(line)).rstrip() % line + '\n')
+
+
+def save_one_json(predn, jdict, path, class_map):
+ # Save one JSON result {"image_id": 42, "category_id": 18, "bbox": [258.15, 41.29, 348.26, 243.78], "score": 0.236}
+ image_id = int(path.stem) if path.stem.isnumeric() else path.stem
+ box = xyxy2xywh(predn[:, :4]) # xywh
+ box[:, :2] -= box[:, 2:] / 2 # xy center to top-left corner
+ for p, b in zip(predn.tolist(), box.tolist()):
+ jdict.append({'image_id': image_id,
+ 'category_id': class_map[int(p[5])],
+ 'bbox': [round(x, 3) for x in b],
+ 'score': round(p[4], 5)})
+
+
+def process_batch(detections, labels, iouv):
+ """
+ Return correct predictions matrix. Both sets of boxes are in (x1, y1, x2, y2) format.
+ Arguments:
+ detections (Array[N, 6]), x1, y1, x2, y2, conf, class
+ labels (Array[M, 5]), class, x1, y1, x2, y2
+ Returns:
+ correct (Array[N, 10]), for 10 IoU levels
+ """
+ correct = torch.zeros(detections.shape[0], iouv.shape[0], dtype=torch.bool, device=iouv.device)
+ iou = box_iou(labels[:, 1:], detections[:, :4])
+ x = torch.where((iou >= iouv[0]) & (labels[:, 0:1] == detections[:, 5])) # IoU above threshold and classes match
+ if x[0].shape[0]:
+ matches = torch.cat((torch.stack(x, 1), iou[x[0], x[1]][:, None]), 1).cpu().numpy() # [label, detection, iou]
+ if x[0].shape[0] > 1:
+ matches = matches[matches[:, 2].argsort()[::-1]]
+ matches = matches[np.unique(matches[:, 1], return_index=True)[1]]
+ # matches = matches[matches[:, 2].argsort()[::-1]]
+ matches = matches[np.unique(matches[:, 0], return_index=True)[1]]
+ matches = torch.Tensor(matches).to(iouv.device)
+ correct[matches[:, 1].long()] = matches[:, 2:3] >= iouv
+ return correct
+
+
+@torch.no_grad()
+def run(data,
+ weights=None, # model.pt path(s)
+ batch_size=32, # batch size
+ imgsz=640, # inference size (pixels)
+ conf_thres=0.001, # confidence threshold
+ iou_thres=0.6, # NMS IoU threshold
+ task='val', # train, val, test, speed or study
+ device='', # cuda device, i.e. 0 or 0,1,2,3 or cpu
+ single_cls=False, # treat as single-class dataset
+ augment=False, # augmented inference
+ verbose=False, # verbose output
+ save_txt=False, # save results to *.txt
+ save_hybrid=False, # save label+prediction hybrid results to *.txt
+ save_conf=False, # save confidences in --save-txt labels
+ save_json=False, # save a COCO-JSON results file
+ project='runs/val', # save to project/name
+ name='exp', # save to project/name
+ exist_ok=False, # existing project/name ok, do not increment
+ half=True, # use FP16 half-precision inference
+ model=None,
+ dataloader=None,
+ save_dir=Path(''),
+ plots=True,
+ callbacks=Callbacks(),
+ compute_loss=None,
+ run_aisa_plots=False
+ ):
+ # Initialize/load model and set device
+ training = model is not None
+ if training: # called by train.py
+ device = next(model.parameters()).device # get model device
+
+ else: # called directly
+ device = select_device(device, batch_size=batch_size)
+
+ # Directories
+ save_dir = increment_path(Path(project) / name, exist_ok=exist_ok) # increment run
+ (save_dir / 'labels' if save_txt else save_dir).mkdir(parents=True, exist_ok=True) # make dir
+
+ # Load model
+ model = attempt_load(weights, map_location=device) # load FP32 model
+ gs = max(int(model.stride.max()), 32) # grid size (max stride)
+ imgsz = check_img_size(imgsz, s=gs) # check image size
+
+ # Multi-GPU disabled, incompatible with .half() https://github.com/ultralytics/yolov5/issues/99
+ # if device.type != 'cpu' and torch.cuda.device_count() > 1:
+ # model = nn.DataParallel(model)
+
+ # Data
+ data = check_dataset(data) # check
+
+ # Half
+ half &= device.type != 'cpu' # half precision only supported on CUDA
+ if half:
+ model.half()
+
+ # Configure
+ model.eval()
+ is_coco = isinstance(data.get('val'), str) and data['val'].endswith('coco/val2017.txt') # COCO dataset
+ nc = 1 if single_cls else int(data['nc']) # number of classes
+ iouv = torch.linspace(0.5, 0.95, 10).to(device) # iou vector for mAP@0.5:0.95
+ niou = iouv.numel()
+
+ # Dataloader
+ if not training:
+ if device.type != 'cpu':
+ model(torch.zeros(1, 3, imgsz, imgsz).to(device).type_as(next(model.parameters()))) # run once
+ task = task if task in ('train', 'val', 'test') else 'val' # path to train/val/test images
+ dataloader = create_dataloader(data[task], imgsz, batch_size, gs, single_cls, pad=0.5, rect=True,
+ prefix=colorstr(f'{task}: '))[0]
+
+ seen = 0
+ confusion_matrix = ConfusionMatrix(nc=nc)
+ names = {k: v for k, v in enumerate(model.names if hasattr(model, 'names') else model.module.names)}
+ class_map = coco80_to_coco91_class() if is_coco else list(range(1000))
+ s = ('%20s' + '%11s' * 6) % ('Class', 'Images', 'Labels', 'P', 'R', 'mAP@.5', 'mAP@.5:.95')
+ p, r, f1, mp, mr, map50, map, t0, t1, t2 = 0., 0., 0., 0., 0., 0., 0., 0., 0., 0.
+ loss = torch.zeros(3, device=device)
+ jdict, stats, ap, ap_class = [], [], [], []
+ extra_metrics = [0.0, 0.0]
+ extra_plots = []
+ ground_truths_extra = []
+ preds_extra = []
+ for batch_i, (img, targets, paths, shapes) in enumerate(tqdm(dataloader, desc=s)):
+ t_ = time_sync()
+ img = img.to(device, non_blocking=True)
+ img = img.half() if half else img.float() # uint8 to fp16/32
+ img /= 255.0 # 0 - 255 to 0.0 - 1.0
+ targets = targets.to(device)
+ nb, _, height, width = img.shape # batch size, channels, height, width
+ t = time_sync()
+ t0 += t - t_
+
+ # Run model
+ out, train_out = model(img, augment=augment) # inference and training outputs
+ t1 += time_sync() - t
+
+ # Compute loss
+ if compute_loss:
+ loss += compute_loss([x.float() for x in train_out], targets)[1] # box, obj, cls
+
+ # Run NMS
+ targets[:, 2:] *= torch.Tensor([width, height, width, height]).to(device) # to pixels
+ lb = [targets[targets[:, 0] == i, 1:] for i in range(nb)] if save_hybrid else [] # for autolabelling
+ t = time_sync()
+ out = non_max_suppression(out, conf_thres, iou_thres, labels=lb, multi_label=True, agnostic=single_cls)
+
+ t2 += time_sync() - t
+
+ # Statistics per image
+ for si, pred in enumerate(out):
+ labels = targets[targets[:, 0] == si, 1:]
+ nl = len(labels)
+ preds_extra += [pred.cpu().numpy()]
+ ground_truths_extra += [[1]*nl]
+ output_predictions = pred[:, 4].cpu().numpy()
+ extra_metrics[0] += np.abs(nl - len(np.where(output_predictions>=0.3)[0]))
+ extra_metrics[1] += np.abs(nl - len(np.where(output_predictions>=0.5)[0]))
+ tcls = labels[:, 0].tolist() if nl else [] # target class
+ path, shape = Path(paths[si]), shapes[si][0]
+ seen += 1
+
+ if len(pred) == 0:
+ if nl:
+ stats.append((torch.zeros(0, niou, dtype=torch.bool), torch.Tensor(), torch.Tensor(), tcls))
+ continue
+
+ # Predictions
+ if single_cls:
+ pred[:, 5] = 0
+ predn = pred.clone()
+ scale_coords(img[si].shape[1:], predn[:, :4], shape, shapes[si][1]) # native-space pred
+
+ # Evaluate
+ if nl:
+ tbox = xywh2xyxy(labels[:, 1:5]) # target boxes
+ scale_coords(img[si].shape[1:], tbox, shape, shapes[si][1]) # native-space labels
+ labelsn = torch.cat((labels[:, 0:1], tbox), 1) # native-space labels
+ correct = process_batch(predn, labelsn, iouv)
+ if plots:
+ confusion_matrix.process_batch(predn, labelsn)
+ else:
+ correct = torch.zeros(pred.shape[0], niou, dtype=torch.bool)
+ stats.append((correct.cpu(), pred[:, 4].cpu(), pred[:, 5].cpu(), tcls)) # (correct, conf, pcls, tcls)
+
+ # Save/log
+ if save_txt:
+ save_one_txt(predn, save_conf, shape, file=save_dir / 'labels' / (path.stem + '.txt'))
+ if save_json:
+ save_one_json(predn, jdict, path, class_map) # append to COCO-JSON dictionary
+ callbacks.on_val_image_end(pred, predn, path, names, img[si])
+
+ # Plot images
+ if plots and batch_i < 3:
+ f = save_dir / f'val_batch{batch_i}_labels.jpg' # labels
+ Thread(target=plot_images, args=(img, targets, paths, f, names), daemon=True).start()
+ f = save_dir / f'val_batch{batch_i}_pred.jpg' # predictions
+ Thread(target=plot_images, args=(img, output_to_target(out), paths, f, names), daemon=True).start()
+
+ # Compute statistics
+ stats = [np.concatenate(x, 0) for x in zip(*stats)] # to numpy
+ if len(stats) and stats[0].any():
+ p, r, ap, f1, ap_class = ap_per_class(*stats, plot=plots, save_dir=save_dir, names=names)
+ ap50, ap = ap[:, 0], ap.mean(1) # AP@0.5, AP@0.5:0.95
+ mp, mr, map50, map = p.mean(), r.mean(), ap50.mean(), ap.mean()
+ nt = np.bincount(stats[3].astype(np.int64), minlength=nc) # number of targets per class
+ else:
+ nt = torch.zeros(1)
+
+ # Print results
+ pf = '%20s' + '%11i' * 2 + '%11.3g' * 4 # print format
+ print(pf % ('all', seen, nt.sum(), mp, mr, map50, map))
+
+ # Print results per class
+ if (verbose or (nc < 50 and not training)) and nc > 1 and len(stats):
+ for i, c in enumerate(ap_class):
+ print(pf % (names[c], seen, nt[c], p[i], r[i], ap50[i], ap[i]))
+
+ # Print speeds
+ t = tuple(x / seen * 1E3 for x in (t0, t1, t2)) # speeds per image
+ if not training:
+ shape = (batch_size, 3, imgsz, imgsz)
+ print(f'Speed: %.1fms pre-process, %.1fms inference, %.1fms NMS per image at shape {shape}' % t)
+
+ # Plots
+ if plots:
+ confusion_matrix.plot(save_dir=save_dir, names=list(names.values()))
+ callbacks.on_val_end()
+
+ # Save JSON
+ if save_json and len(jdict):
+ w = Path(weights[0] if isinstance(weights, list) else weights).stem if weights is not None else '' # weights
+ anno_json = str(Path(data.get('path', '../coco')) / 'annotations/instances_val2017.json') # annotations json
+ pred_json = str(save_dir / f"{w}_predictions.json") # predictions json
+ print(f'\nEvaluating pycocotools mAP... saving {pred_json}...')
+ with open(pred_json, 'w') as f:
+ json.dump(jdict, f)
+
+ try: # https://github.com/cocodataset/cocoapi/blob/master/PythonAPI/pycocoEvalDemo.ipynb
+ check_requirements(['pycocotools'])
+ from pycocotools.coco import COCO
+ from pycocotools.cocoeval import COCOeval
+
+ anno = COCO(anno_json) # init annotations api
+ pred = anno.loadRes(pred_json) # init predictions api
+ eval = COCOeval(anno, pred, 'bbox')
+ if is_coco:
+ eval.params.imgIds = [int(Path(x).stem) for x in dataloader.dataset.img_files] # image IDs to evaluate
+ eval.evaluate()
+ eval.accumulate()
+ eval.summarize()
+ map, map50 = eval.stats[:2] # update results (mAP@0.5:0.95, mAP@0.5)
+ except Exception as e:
+ print(f'pycocotools unable to run: {e}')
+
+ extra_videos = []
+ if run_aisa_plots:
+ fig, suggested_threshold = plot_object_count_difference_ridgeline(ground_truths_extra, preds_extra)
+
+ def video_prediction_function(frame_array):
+ n_frames = len(frame_array)
+ preds = []
+ for i in range(0, n_frames, 4):
+ frames = []
+ for frame in frame_array[i: min(i + 4, n_frames)]:
+ from utils.datasets import letterbox
+ img = letterbox(frame, new_shape=(imgsz,imgsz))[0]
+ img = np.array([img, img, img])
+ img = np.ascontiguousarray(img)
+ frames.append(img)
+ frames = np.array(frames)
+
+ # Convert img to torch
+ img = torch.from_numpy(frames).to(device)
+ img = img.half() if device.type != "cpu" else img.float() # uint8 to fp16/32
+ img /= 255.0 # 0 - 255 to 0.0 - 1.0
+ if img.ndimension() == 3:
+ img = img.unsqueeze(0)
+ # Inference
+ # t1 = time_synchronized()
+ pred = model(img, augment=False)[0]
+
+ # Apply NMS
+ pred = non_max_suppression(pred, conf_thres=suggested_threshold)
+ preds += list(pred)
+ return preds
+
+ video_path = Path(r"D:\Nanovare\data\karolinska\capture_MAST_data\2020_05_27\tp49\cover1_7.avi")
+ v = make_video_results(video_path, video_prediction_function)
+ extra_plots = [fig]
+
+ # Return results
+ model.float() # for training
+ if not training:
+ s = f"\n{len(list(save_dir.glob('labels/*.txt')))} labels saved to {save_dir / 'labels'}" if save_txt else ''
+ print(f"Results saved to {colorstr('bold', save_dir)}{s}")
+ maps = np.zeros(nc) + map
+ for i, c in enumerate(ap_class):
+ maps[c] = ap[i]
+ extra_metrics = [_/len(dataloader) for _ in extra_metrics]
+
+ return (mp, mr, map50, map, *(loss.cpu() / len(dataloader)).tolist()), maps, t, extra_metrics, extra_plots, extra_videos
+
+
+def parse_opt():
+ parser = argparse.ArgumentParser(prog='val.py')
+ parser.add_argument('--data', type=str, default='data/coco128.yaml', help='dataset.yaml path')
+ parser.add_argument('--weights', nargs='+', type=str, default='yolov5s.pt', help='model.pt path(s)')
+ parser.add_argument('--batch-size', type=int, default=32, help='batch size')
+ parser.add_argument('--imgsz', '--img', '--img-size', type=int, default=640, help='inference size (pixels)')
+ parser.add_argument('--conf-thres', type=float, default=0.001, help='confidence threshold')
+ parser.add_argument('--iou-thres', type=float, default=0.6, help='NMS IoU threshold')
+ parser.add_argument('--task', default='val', help='train, val, test, speed or study')
+ parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--single-cls', action='store_true', help='treat as single-class dataset')
+ parser.add_argument('--augment', action='store_true', help='augmented inference')
+ parser.add_argument('--verbose', action='store_true', help='report mAP by class')
+ parser.add_argument('--save-txt', action='store_true', help='save results to *.txt')
+ parser.add_argument('--save-hybrid', action='store_true', help='save label+prediction hybrid results to *.txt')
+ parser.add_argument('--save-conf', action='store_true', help='save confidences in --save-txt labels')
+ parser.add_argument('--save-json', action='store_true', help='save a COCO-JSON results file')
+ parser.add_argument('--project', default='runs/val', help='save to project/name')
+ parser.add_argument('--name', default='exp', help='save to project/name')
+ parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
+ parser.add_argument('--half', action='store_true', help='use FP16 half-precision inference')
+ opt = parser.parse_args()
+ opt.save_json |= opt.data.endswith('coco.yaml')
+ opt.save_txt |= opt.save_hybrid
+ opt.data = check_file(opt.data) # check file
+ return opt
+
+
+def main(opt):
+ set_logging()
+ print(colorstr('val: ') + ', '.join(f'{k}={v}' for k, v in vars(opt).items()))
+ check_requirements(requirements=FILE.parent / 'requirements.txt', exclude=('tensorboard', 'thop'))
+
+ if opt.task in ('train', 'val', 'test'): # run normally
+ run(**vars(opt))
+
+ elif opt.task == 'speed': # speed benchmarks
+ for w in opt.weights if isinstance(opt.weights, list) else [opt.weights]:
+ run(opt.data, weights=w, batch_size=opt.batch_size, imgsz=opt.imgsz, conf_thres=.25, iou_thres=.45,
+ save_json=False, plots=False)
+
+ elif opt.task == 'study': # run over a range of settings and save/plot
+ # python val.py --task study --data coco.yaml --iou 0.7 --weights yolov5s.pt yolov5m.pt yolov5l.pt yolov5x.pt
+ x = list(range(256, 1536 + 128, 128)) # x axis (image sizes)
+ for w in opt.weights if isinstance(opt.weights, list) else [opt.weights]:
+ f = f'study_{Path(opt.data).stem}_{Path(w).stem}.txt' # filename to save to
+ y = [] # y axis
+ for i in x: # img-size
+ print(f'\nRunning {f} point {i}...')
+ r, _, t = run(opt.data, weights=w, batch_size=opt.batch_size, imgsz=i, conf_thres=opt.conf_thres,
+ iou_thres=opt.iou_thres, save_json=opt.save_json, plots=False)
+ y.append(r + t) # results and times
+ np.savetxt(f, y, fmt='%10.4g') # save
+ os.system('zip -r study.zip study_*.txt')
+ plot_study_txt(x=x) # plot
+
+
+if __name__ == "__main__":
+ opt = parse_opt()
+ main(opt)
diff --git a/weights/download_weights.sh b/weights/download_weights.sh
deleted file mode 100755
index 206b7002aec..00000000000
--- a/weights/download_weights.sh
+++ /dev/null
@@ -1,10 +0,0 @@
-#!/bin/bash
-# Download common models
-
-python -c "
-from utils.google_utils import *;
-attempt_download('weights/yolov5s.pt');
-attempt_download('weights/yolov5m.pt');
-attempt_download('weights/yolov5l.pt');
-attempt_download('weights/yolov5x.pt')
-"