由于工作需要,一直对原子多播应用有非常浓厚的兴趣。通过一段时间的技术选型。我们非常幸运的得到了databOpenRaft实操分享end社群的热心支持。我也想通过我们的实际工作,对Openraft的未来应用尽一些微薄之力。
我的实践的上一篇文章反应了我们的选型过程,有兴趣的人可以看一下。Raft in Rust (原子多播+撮合引擎)这篇文章更多的是想说明我们在使用OpenRaft的实际问题,并且通过我们的实现,揭秘OpenRaft的一些机制。
大家在使用OpenRaft的时候,我相信很多人都查看了手册: Getting Started - openraftThe openraft user guide.
当然,这是一个非常优秀的手册。我们从这个手册里,会学习到如何使用OpenRaft实现自己的应用。而且,openraft/example-raft-kv这个例子确实能够很好的说明如何实现一个简单的应用。但是,这个例子是使用的内存来做持久化实现。当然内存不会真正做持久化,所以很容易在节点退出后,丢失状态。而我们真正需要的示例是一个能够持久化的例子。
另外一个实例就是 databend/metasrv而这个示例里面,我们可以看到一个完整的 metadata 存储服务的实现。实际上,metasrv本身是一个类似于etcd的kv存储。存储整个databend集群的metadata。这个示例里面,metasrv使用了sled作为底层存储。sled寄存储log,有存储 statemachine 的状态。这个例子,statemachine所有的更新都直接在sled存储里通过sled的事物完成了。所以,对于如何存储snapshot这个问题,我们并不太容易看清楚。所以snapshot的产生和传递主要是在节点间同步的时候使用。
这里,大家可以看到我们开放的源代码。虽然这个示例是基于 example-raft-kv 示例,没有达到 metasrv的生产强度。但是我们还是非常全面的表现出了 openraft 对 log, snapshot 处理的行为和能力。
GitHub - raymondshe/matchengine-raft
和metasrv的场景不同。我们需要我们的statemachine尽量在内存里面更新,尽量少落盘。虽然sled本地落盘的速度也很快,但是内存操作的速度会更快。所以,我们基本上就是这样进行操作的。

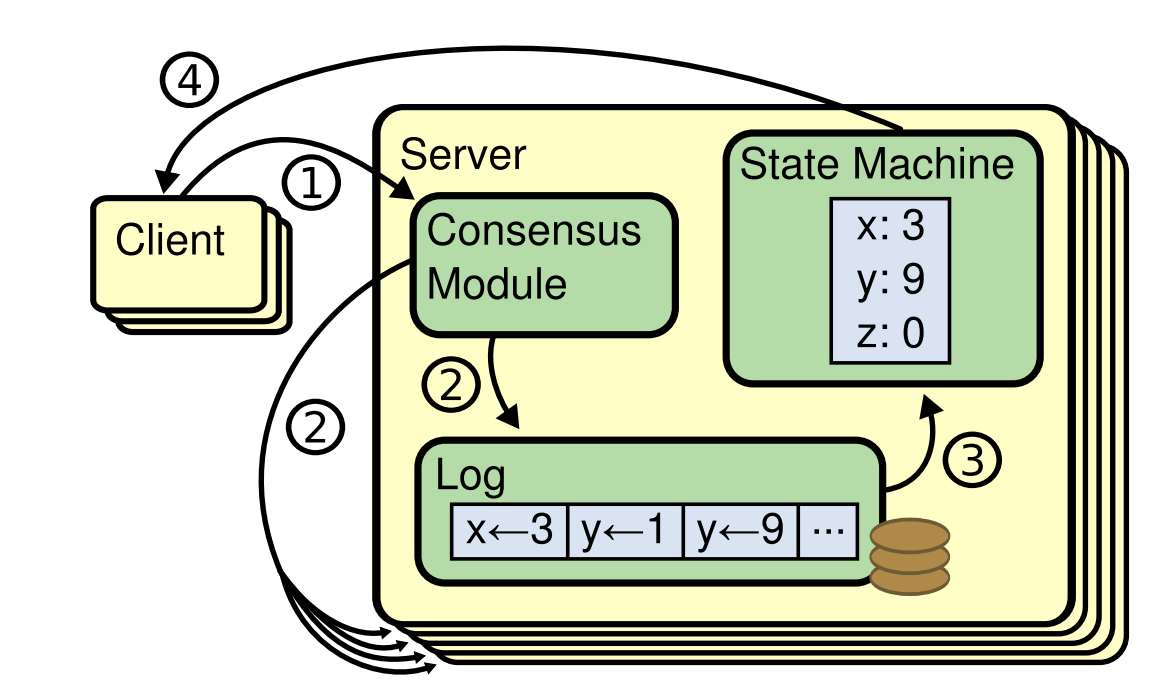
所以在这个图里面,大家可以看到日志是通过sled进行存储的。而这些日志由于通过Raft协议,实际上他们在每台机器上的顺序是一致的。所以,不同的matchengine-raft实例,在相同的日志流情况下,对状态机的操作就是一致的。所以,不管我们从哪一个日志开始写snapshot,通过加载snapshot并且回放后续的日志,我们都可以恢复到最新状态。
按照设计图中显示,当前StateMachine的状态是处理了第9个日志里的消息。这时候,系统保存了所有的消息到Sled。并且在第3个消息的时候落盘了一次snapshot,并且在低6个消息的时候落盘了一次snapshot。如果这台机器当机,我们是可以从编号为3的snapshot恢复状态机,并且继续处理3,4,5,6,7,8,9这6条消息来恢复当前状态。当然,我们也可以从编号为6的snapshot恢复状态机,并且继续处理7,8,9这3条消息来恢复当前状态。
当然我们可以选择多少个消息进行一次落盘。当然落盘的次数越多越可靠,但是性能影响比较大。好在snapshot的生成和落盘是异步的方式做的。
有兴趣的朋友可以看一下akka的 EventSroucing 模式。这种模式和Raft单节点非常相像。不同的是OpenRaft强调多实例一致性,而Akka 则提供了非常多的方式来存储 Log( Journal )和 Snapshot.
谈到实现细节。我们还是回到官方文档 geting-started 来。我们也按照这个文档的顺序进行说明。
Raft对于从应用开发着的角度,我们可以简化到下面的这张图里。Raft的分布式共识就是要保证驱动状态机的指令能够在 Log 里被一致的复制到各个节点里。
Raft有两个重要的组成部分:
- 如何一致的在节点之间复制日志
- 并且在状态机里面如何消费这些日志
基于OpenRaft 实现我们自己的 Raft 应用其实并不复杂,只需要一下三部分:
- 定义好客户端的请求和应答
- 实现好存储 RaftStore 来持久化状态
- 实现一个网络层,来保证 Raft 节点之间能相互传递消息。
好,那我们就开始吧:
请求有可能是客户端发出的驱动 Raft 状态机的数据,而应答则是 Raft 状态机会打给客户端的数据。
请求和应答需要实现 AppData 和 AppDataResponse 这里,我们的实现如下:
#[derive(Serialize, Deserialize, Debug, Clone)]
pub enum ExampleRequest {
Set { key: String, value: String },
Place { order: Order },
Cancel { order: Order}
}
#[derive(Serialize, Deserialize, Debug, Clone)]
pub struct ExampleResponse {
pub value: Option<String>,
}这两个类型完全是应用相关的,而且和RaftStrage的状态机实现相关。
- 这里,Set是 example-raft-kv 原示例就有的命令。
- 大家也注意到了,命令都是对状态机有驱动的命令。也就是会对状态机状态造成改变的命令。如果我们需要取状态机内部数据的值返回给客户端。我们大可不必定义到这里。
这是整个项目非常关键的一部分。
只要实现好 trait RaftStorage,我们就把数据存储和消费的行为定义好。RaftStoreage可以包装一个像 RocksDB, Sled 的本地 KV 存储或者远端的 SQL DB。
RaftStorage 定义了下面一些API
- 读写Raft状态,比方说 term,vote (term:任期,vote:投票结果)
fn save_vote(vote:&Vote)
fn read_vote() -> Result<Option<Vote>>- 读写日志
fn get_log_state() -> Result<LogState> fn try_get_log_entries(range) -> Result<Vec<Entry>>
fn append_to_log(entries)
fn delete_conflict_logs_since(since:LogId)
fn purge_logs_upto(upto:LogId)- 将日志的内容应用到状态机
fn last_applied_state() -> Result<(Option<LogId>,Option<EffectiveMembership>)>
fn apply_to_state_machine(entries) -> Result<Vec<AppResponse>>- 创建和安装快照(snapshot)
fn build_snapshot() -> Result<Snapshot> fn get_current_snapshot() -> Result<Option<Snapshot>>
fn begin_receiving_snapshot() -> Result<Box<SnapshotData>>
fn install_snapshot(meta, snapshot)在 ExampleStore,这些内存化存储行为是非常明确简单的。而我们不是要真正落盘了吗?那我们就看一下 matchengine-rust 是怎么实现的。
这里是 matchengine-raft/src/store
| 接口 | 实现方式 |
|---|---|
| Raft状态 | sled存储,使用专门的key来读写raft状态。 |
| 日志 | sled存储,使用 log_index 来唯一标识一个 Log Entity |
| 应用状态机 | 状态机里面一部分是业务数据,但是一部分是raft的数据。业务数据主要是订单薄。 |
| 快照 | 快照完全是通过文件进行存储的,而且文件的名字就保留了快照的全部meta信息。 |
我们说明一些设计要点
ExchangeStore 里面主要是包含下面的成员变量。
#[derive(Debug)]
pub struct ExampleStore {
last_purged_log_id: RwLock<Option<LogId<ExampleNodeId>>>,
/// The Raft log.
pub log: sled::Tree,
/// The Raft state machine.
pub state_machine: RwLock<ExampleStateMachine>,
/// The current granted vote.
vote: sled::Tree,
snapshot_idx: Arc<Mutex<u64>>,
current_snapshot: RwLock<Option<ExampleSnapshot>>,
config : Config,
pub node_id: ExampleNodeId,
}帮助我们落盘的成员主要是 log, vote。而需要产生snapshot进行落盘的所有内容都在 state_machine.
-
last_purged_log_id: 这是最后删除的日志ID。删除日志本身可以节约存储,但是,对我们来讲,我了保证数据存储的安全。在删除日志之前,我们必须有这条日志index大的snapshot产生。否则,我们就没有办法通过snapshot来恢复数据。
-
log: 这是一个 sled::Tree,也就是一个map。如果看着部分代码的话,我们就可以清楚的明白log对象的结构。key是一个log_id_index的 Big Endian 的字节片段。value是通过serd_json进行序列化的内容。
#[tracing::instrument(level = "trace", skip(self, entries))]
async fn append_to_log(
&mut self,
entries: &[&Entry<ExampleTypeConfig>],
) -> Result<(), StorageError<ExampleNodeId>> {
let log = &self.log;
for entry in entries {
log.insert(entry.log_id.index.to_be_bytes(), IVec::from(serde_json::to_vec(&*entry).unwrap())).unwrap();
}
Ok(())
}- state_machine: 这里就是通过日志驱动的所有状态的集合。
#[derive(Serialize, Deserialize, Debug, Default, Clone)]pub struct ExampleStateMachine {
pub last_applied_log: Option<LogId<ExampleNodeId>>,
// TODO: it should not be Option.
pub last_membership: EffectiveMembership<ExampleNodeId>,
/// Application data.
pub data: BTreeMap<String, String>,
// ** Orderbook
pub orderbook: OrderBook,
}StateMachine里面最重要的数据就是 orderbook这部分就是撮合引擎里面重要的订单表。存放买方和卖方的未成交订单信息。这是主要的业务逻辑。 data 这部分是原来例子中的kv存储。我们还在这里没有删除。
这里last_applied_log, last_menbership 这些状态和业务逻辑没有太大关系。所以,如果您要实现自己的StateMachine。还是尽量和例子保持一致。主要是因为这两个状态是通过apply_to_state_machine这个接口更新。也正好需要持久化。如果需要进一步隐藏raft的细节,我们还是建议openraft能将这两个状态进一步进行隐藏封装。
对state_machine的落盘操作主要集中在这里:store/store.rs。有兴趣的可以看一下。这里面比较有意思的问题是orderbook本身无法被默认的serde_json序列化/反序列化。所以我们才在 matchengine/mod.rs 加了这段代码:
pub mod vectorize {
use serde::{Deserialize, Deserializer, Serialize, Serializer};
use std::iter::FromIterator;
pub fn serialize<'a, T, K, V, S>(target: T, ser: S) -> Result<S::Ok, S::Error>
where
S: Serializer,
T: IntoIterator<Item = (&'a K, &'a V)>,
K: Serialize + 'a,
V: Serialize + 'a,
{
let container: Vec<_> = target.into_iter().collect();
serde::Serialize::serialize(&container, ser)
}
pub fn deserialize<'de, T, K, V, D>(des: D) -> Result<T, D::Error>
where
D: Deserializer<'de>,
T: FromIterator<(K, V)>,
K: Deserialize<'de>,
V: Deserialize<'de>,
{
let container: Vec<_> = serde::Deserialize::deserialize(des)?;
Ok(T::from_iter(container.into_iter()))
}
}
/// main OrderBook structure
#[derive(Clone, Default, Serialize, Deserialize, Debug)]
pub struct OrderBook {
#[serde(with = "vectorize")]
pub bids: BTreeMap<BidKey, Order>,
#[serde(with = "vectorize")]
pub asks: BTreeMap<AskKey, Order>,
pub sequance: u64,
}- vote: 就是对最后一次vote的存储。具体请看, 铁这段代码倒不是因为这段代码有多重要,只是由于代码比较简单,看可以少些一些说明:
#[tracing::instrument(level = "trace", skip(self))]
async fn save_vote(&mut self, vote: &Vote<ExampleNodeId>) -> Result<(), StorageError<ExampleNodeId>> {
self.vote.insert(b"vote", IVec::from(serde_json::to_vec(vote).unwrap())).unwrap();
Ok(())
}
async fn read_vote(&mut self) -> Result<Option<Vote<ExampleNodeId>>, StorageError<ExampleNodeId>> {
let value = self.vote.get(b"vote").unwrap();
match value {
None => {Ok(None)},
Some(val) => {Ok(Some(serde_json::from_slice::<Vote<ExampleNodeId>>(&*val).unwrap()))}
}
}但是这儿确实有个小坑,之前我没有注意到vote需要持久化,开始调试的时候产生了很多问题。知道找到openraft作者 Zhang Yanpo才解决。也是出发我想开源这个 openraft 文件持久化实现的诱因吧。感谢 Zhang Yanpo, 好样的。
- 其他的成员变量其实没什么太好说的了。和原例子一样。
日志,快照相互配合,我们可以很好的持久化状态,并且恢复最新状态。多久写一次快照,保存多少日志。在这里我们使用了下面的代码。
let mut config = Config::default().validate().unwrap();
config.snapshot_policy = SnapshotPolicy::LogsSinceLast(500);
config.max_applied_log_to_keep = 20000;
config.install_snapshot_timeout = 400;强烈建议大家看一下 Config in openraft::config - Rust
重点看 snapshot_policy, 代码里可以清楚的标识,我们需要500次log写一次快照。也就是 openraft会调用 build_snapshot 函数创建snapshot。原示例里,snapshot只是在内存里保存在 current_snapshot 变量里。而我们需要真实的落盘。请注意这段代码的 self.write_snapshot()
#[async_trait]
impl RaftSnapshotBuilder<ExampleTypeConfig, Cursor<Vec<u8>>> for Arc<ExampleStore> {
#[tracing::instrument(level = "trace", skip(self))]
async fn build_snapshot(
&mut self,
) -> Result<Snapshot<ExampleTypeConfig, Cursor<Vec<u8>>>, StorageError<ExampleNodeId>> {
let (data, last_applied_log);
{
// Serialize the data of the state machine.
let state_machine = self.state_machine.read().await;
data = serde_json::to_vec(&*state_machine)
.map_err(|e| StorageIOError::new(ErrorSubject::StateMachine, ErrorVerb::Read, AnyError::new(&e)))?;
last_applied_log = state_machine.last_applied_log;
}
let last_applied_log = match last_applied_log {
None => {
panic!("can not compact empty state machine");
}
Some(x) => x,
};
let snapshot_idx = {
let mut l = self.snapshot_idx.lock().unwrap();
*l += 1;
*l
};
let snapshot_id = format!(
"{}-{}-{}",
last_applied_log.leader_id, last_applied_log.index, snapshot_idx
);
let meta = SnapshotMeta {
last_log_id: last_applied_log,
snapshot_id,
};
let snapshot = ExampleSnapshot {
meta: meta.clone(),
data: data.clone(),
};
{
let mut current_snapshot = self.current_snapshot.write().await;
*current_snapshot = Some(snapshot);
}
self.write_snapshot().await.unwrap();
Ok(Snapshot {
meta,
snapshot: Box::new(Cursor::new(data)),
})
}
}这下我们有了snapshot,当然snapshot一方面可以用来在节点之间同步状态。另一方面就是在启动的时候恢复状态。而 openraft 的实现非常好。实际上恢复状态只需要回复到最新的snapshot就行。只要本地日志完备,openraft 会帮助你调用 apply_to_statemachine 来恢复到最新状态。所以我们就有了restore函数。
#[async_trait]
impl Restore for Arc<ExampleStore> {
#[tracing::instrument(level = "trace", skip(self))]
async fn restore(&mut self) {
tracing::debug!("restore");
let log = &self.log;
let first = log.iter().rev()
.next()
.map(|res| res.unwrap()).map(|(_, val)|
serde_json::from_slice::<Entry<ExampleTypeConfig>>(&*val).unwrap().log_id);
match first {
Some(x) => {
tracing::debug!("restore: first log id = {:?}", x);
let mut ld = self.last_purged_log_id.write().await;
*ld = Some(x);
},
None => {}
}
let snapshot = self.get_current_snapshot().await.unwrap();
match snapshot {
Some (ss) => {self.install_snapshot(&ss.meta, ss.snapshot).await.unwrap();},
None => {}
}
}
}大家注意一下snapshot的操作。当然,在这里,我们也恢复了last_purged_log_id。
当然store这个函数会在ExampleStore刚刚构建的时候调用。
// Create a instance of where the Raft data will be stored.
let es = ExampleStore::open_create(node_id);
//es.load_latest_snapshot().await.unwrap();
let mut store = Arc::new(es);
store.restore().await;请查阅 Test suite for RaftStorage, 如果通过这个测试,一般来讲,OpenRaft就可以使用他了。
#[test]
pub fn test_mem_store() -> anyhow::Result<()> { openraft::testing::Suite::test_all(MemStore::new) }在我们的设计里,在一个时刻,最多有一个线程会写状态,但是,会有多个线程来进行读取。比方说,可能有多个复制任务在同时度日志和存储。
调用者会假设所有的写操作都被持久化了。而且Raft的纠错机制也是依赖于可靠的存储。
为了节点之间对日志能够有共识,我们需要能够让节点之间进行通讯。trait RaftNetwork就定义了数据传输的需求。RaftNetwork的实现可以是考虑调用远端的Raft节点的服务
pub trait RaftNetwork<D>: Send + Sync + 'static where D: AppData {
async fn send_append_entries(&self, target: NodeId, node:Option<Node>, rpc: AppendEntriesRequest<D>) -> Result<AppendEntriesResponse>;
async fn send_install_snapshot( &self, target: NodeId, node:Option<Node>, rpc: InstallSnapshotRequest,) -> Result<InstallSnapshotResponse>;
async fn send_vote(&self, target: NodeId, node:Option<Node>, rpc: VoteRequest) -> Result<VoteResponse>;
}ExampleNetwork 显示了如何调用传输消息。每一个Raft节点都应该提供有这样一个RPC服务。当节点收到raft rpc,服务会吧请求传递给raft实例,并且通过raft-server-endpoint返回应答。
在实际情况下可能使用 Tonic gRPC是一个更好的选择。 databend-meta 里有一个非常好的参考实现。
在我们的 matchengen-raft 实现里,我们解决了原示例中大量重连的问题。
- 维护一个可服用量的client
这段代码在:network/raft_network_impl.rs
let clients = Arc::get_mut(&mut self.clients).unwrap();
let client = clients.entry(url.clone()).or_insert(reqwest::Client::new());- 在服务器端引入keep_alive
这段代码在:lib.rs
// Start the actix-web server.
let server = HttpServer::new(move || {
App::new()
.wrap(Logger::default())
.wrap(Logger::new("%a %{User-Agent}i"))
.wrap(middleware::Compress::default())
.app_data(app.clone())
// raft internal RPC
.service(raft::append)
.service(raft::snapshot)
.service(raft::vote)
// admin API
.service(management::init)
.service(management::add_learner)
.service(management::change_membership)
.service(management::metrics)
// application API
.service(api::write)
.service(api::read)
.service(api::consistent_read)
}).keep_alive(Duration::from_secs(5));这样的改动确实是对性能有一些提升。但是真的需要更快的话,我们使用grpc,甚至使用 reliable multicast,比方说 pgm。
由于我们保留了之前的 key/value 实现。所以之前的脚本应该还是能够工作的。而且之前的key/value 有了真正的存储。
为了能够运行集群:
-
启动三个没有初始化的raft节点;
-
初始化其中一台raft节点;
-
把其他的raft节点加入到这个集群里;
-
更新raft成员配置。 example-raft-kv 的readme文档里面把这些步骤都介绍的比较清楚了。
-
下面两个测试脚本是非常有用的: test-cluster.sh 这个脚本可以简练的掩饰如何用curl和raft集群进行交互。在脚本里,您可以看到所有http请求和应答。
test_cluster.rs 这个rust程序显示了怎么使用ExampleClient操作集群,发送请求和接受应答。
这里我们要强调的是,在初始化raft集群的时候。我们需要上述的过程。如果集群已经被初始化,并且我们已经持久化了相应的状态 (menbership, vote, log) 以后,再某些节点退出并且重新加入,我们就不需要再过多干预了。
在使用metasrv启动meta service的时候,我也遇到了相同的情况。所以还是要先启动一个single node以保证这个节点作为种子节点被合理初始化了。
Deploy a Databend Meta Service Cluster | Databend
为了更好的启动管理集群,我们在项目里添加了 test.sh。用法如下:
./test.sh <command> <node_id>我们可以在不同阶段调用不同的命令。大家有兴趣的话可以看一下代码。这部分是主程序部分,包含了我们实现的所有命令。
echo "Run command $1"
case $1 in
"place-order")
place_order $2
;;
"metrics")
get_metrics $2
;;
"kill-node")
kill_node $2
;;
"kill")
kill
;;
"start-node")
start_node $2
;;
"get-seq")
rpc 2100$2/read '"orderbook_sequance"'
;;
"build-cluster")
build_cluster $2
;;
"change-membership")
change_membership $2
;;
"clean")
clean
;;
*)
"Nothing is done!"
;;
esac当前我们实现的matchengine-raft只是为了示例怎么通过raft应用到撮合引擎这样一个对性能,稳定性,高可用要求都非常苛刻的应用场景。通过 raft 集群来完成撮合引擎的分布式管理。我们相信真正把这个玩具撮合引擎推向产品环境,我们还是需要进行很多工作:
- 优化序列化方案,serd_json固然好,但是通过字符串进行编解码还是差点儿意思。至少用到bson或者更好的用 protobuf, avro等,提高编解码速度,传输和存储的开销。
- 优化RaftNetwork, 在可以使用multi-cast的情况下使用pgm,如果不行,可以使用grpc。
- 撮合结果的分发。这部分在很多情况下依赖消息队列中间件比较好。
- 增加更多的撮合算法。这部分完全是业务需求,和openraft无关。我们就不在这个文章里讨论了。
- 完善测试和客户端的调用。
- 完善压测程序,准备进一步调优。
通过这个简单的小项目,我们:
- 实现了一个简单的玩具撮合引擎。
- 验证了OpenRaft在功能上对撮合引擎场景的支持能力。
- 给OpenRaft提供了一个基于 sled KV存储的日志存储的参考实现。
- 给OpenRaft提供了一个基于本地文件的快照存储的参考实现。
给大家透露一个小秘密,SAP也在使用OpenRaft来构建关键应用。大家想想,都用到Raft协议了,一定是非常重要的应用。
对于 databend 社群的帮助,我表示由衷的感谢。作为一个长期工作在软件行业一线的老程序猿,看到中国开源软件开始在基础构建发力,由衷的感到欣慰。也希望中国开源社群越来越好,越来越强大,走向软件行业的顶端。