+
+
+
+## Preface
+
+### Purpose
+
+This document is intended to provide a full description of the K230 platform and its features.
+
+### Intended Audience
+
+The main people to whom this document (this guide) applies:
+
+- Design and maintenance personnel for electronic products
+- Sales personnel for electronic products
+- Technical support personnel
+
+### Terms
+
+### Revision history
+
+| Version Number | Modified by | Revision Date | Revision Notes |
+| -------------- | -------------- | ------------- | --------------------------------------------------------------------------------- |
+| V1.0 | Ruizheng Li,Heng Wen | 2023-7-6 | Revised version |
+| | | | |
+
+
+
+## Index
+
+[TOC]
+
+
+
+## Chapter 1 Introduction
+
+### 1.1 Overview
+
+The K230 chip is the latest generation SoC product in Canaan Technology's (NASDAQ: CAN) Kendryte® series of AIOT chips. The chip adopts a brand-new multi-heterogeneous unit acceleration computing architecture, integrates two RISC-V C908 computing cores, and has a built-in new generation KPU (Knowledge Process Unit) intelligent computing unit. Multi-precision AI computing power with INT8 and INT16. Supports general AI computing framework. The chip also has a variety of peripheral interfaces, as well as multiple scalar, vector, graphics, and other dedicated hardware acceleration units such as image 2D engine, AI 2D engine, 2.5D GPU, and 3D depth engine. K230 provides full-process computing acceleration for various computing tasks such as images, videos, audio, AI, etc. The chip has many features such as low latency, high performance, low power consumption, fast startup, and high security.
+K230 can be used in various smart hardware products, such as smart door locks, home smart security cameras, dictionary pens, payment recognition, 3D structured light vision modules, drones, interactive robots, smart home appliances, smart toys, and smart manufacturing, intelligent vehicle cockpit and many other fields.
+
+### 1.2 Feature
+
+#### 1.2.1 CPU subsystem
+
+- CPU0 subsystem
+
+ - 64bit RISC-V processor
+ - Supports maximum 800 MHz working frequency
+ - Supports RISC-V 64GCB instruction set
+ - Cpu contains floating-point units (FPUs)
+ - L1 cache contains 32 KB instruction cache (I-cache) and 32 KB data cache (D-cache)
+ - Integrates with 128 KB L2 cache
+ - Supports memory management unit (MMU)
+ - Integrates with the interrupt controller (PLIC), which can process 208 interrupt external sources
+ - Supports the Joint Test Action Group (JTAG) debugging interface
+ - Supports WFI
+
+- CPU1 subsystem
+
+ - 64bit RISC-V processor
+ - Supports maximum 1.6 GHz working frequency
+ - Supports RISC-V Vector Extension 1.0 specification
+ - Cpu contains floating-point units (FPUs)
+ - 128bits vector-process-unit
+ - L1 cache contains 32 KB instruction cache (I-cache) and 32 KB data cache (D-cache)
+ - Integrates with 256 KB L2 cache
+ - Supports memory management unit (MMU)
+ - Integrates with the interrupt controller (PLIC), which can process 208 interrupt external sources
+ - Supports the Joint Test Action Group (JTAG) debugging interface
+ - Supports WFI
+
+#### 1.2.2 KPU subsystem
+
+- Support INT8 and INT16
+- Support weight sparse compression
+- Typical network performance:
+ - Resnet 50 ≥ 85fps @INT8
+ - Mobilenet_v2 ≥ 670fps @INT8
+ - YoloV5S ≥ 38fps @INT8
+- Support TensorFlow / PyTorch / TFLite / PaddlePaddle / ONNX
+- Support quantization toolchain and profiling tools
+- Loss of quantization accuracy <1%
+- Support Abs, Acos, Acosh, And, ArgMax, ArgMin, Asin, Asinh, Add, AveragePool, BatchNormalization, Cast, Ceil, Celu, Clip, Concat, Constant, ConstantOfShape, Conv, ConvTranspose, Cos, Cosh, CumSum, DepthToSpace, DequantizeLinear, Div, Dropout, Elu, Equal, Exp, Erf, Expand, Flatten, Floor, Gather, GatherElements, GatherND, Gemm, GlobalAveragePool, GlobalMaxPool, Greater, GreaterOrEqual, Hardmax, HardSigmoid, HardSwish, Identity, InstanceNormalization, LpNormalization, LeakyRelu, Less, LessOrEqual, Log, LogSoftmax, LRN, LSTM, MatMul, MaxPool, Max, Min, Mod, Mul, Neg, Not, OneHot, Pad, Pow, PRelu, QuantizeLinear, QLinearConv, QLinearMatmul, RandomNormal, RandomNormalLike, RandomUniform, RandomUniformLike, Range, ReduceL1, ReduceL2, ReduceLogSum, ReduceLogSumExp, ReduceMax, ReduceMean, ReduceMin, ReduceProd, ReduceSum, ReduceSumSquare, Relu, Reshape, Resize, ReverseSequence, Round, ScatterND, Selu, Shape, Sin, Sinh, Sigmoid, Sign, Size, Slice, Softmax, Softplus, Softsign, SpaceToDepth, Split, Sqrt, Squeeze, Sub, Sum, Tanh, Tile, TopK, Transpose, Upsample, Unsqueeze, Where
+
+#### 1.2.3 2D Engine
+
+- 2D GDMA Engine
+
+ - X-Mirror/Y-Mirror/Rotation(90/180/270)
+ - Typical image rotation capability:
+ - 2 x 1080\*1280 YUV400 @15fps + 1 x 1080\*1920 YUV420 @30fps
+ - Provides one physical DMA channel
+ - The axi data width is 64-bit
+ - Supports configurable axi transaction outstanding numbers: the max outstanding number is 8
+ - Supports data transfer with the linked list
+ - Supports configurable weight-based channel priority arbitration
+ - Supports lowpower mode:each channel supports auto clock gate
+ - Supports configurable image row stride
+ - The maximum image resolution supports 64Kx64K
+ - The data width of the image pixel supports 8/16/24/32bits
+ - Max Burst length can be set to 8 or 4 for non-24bit width pixel, and 12 for 24bit pixel
+
+- Non AI 2D
+ - Support OSD mode
+ - Support CSC mode
+ - Support draw border mode
+ - Support corp operation
+
+- Independent AI 2D Engine
+ - Affine/Crop/Resize/Padding/Shift
+ - Resize
+ - Crop
+ - Affine
+ - The calculation of resize and affine coordinates supports opencv's round, as well as ceil and floor
+ - Pad
+ - Support four edge parts to complement constant pads, the pad value can be specified, and the maximum number of pads on a single side is 1023
+ - CSC
+ - Both input and output images support the following formats
+ - YUV420_NV12
+ - YUV420_NV12
+ - YUV420_I420
+ - YUV400
+ - RGB_packed
+ - NCHW
+
+ - Shift
+
+ - RAW16 input -> shift to RAW8 output
+
+ - Support CPU to read internal registers
+
+ - The accelerator can access the system SRAM(2MB).
+
+ - Support software reset through configuration register
+
+ - Support clk gating
+
+ **NOTE**
+
+ - Note1: The highest source image resolution supports 4K
+
+ - Note2: All configured ddr addresses follow 16B align, which is friendly to performance
+
+ - Note3: A configuration register cannot exceed 1KB
+
+ - Note4: When configuring cpu, configure 32bit each time, and configure 4 times for each 128bit, and must configure 4 times, the order is from low to high; when configuring GNNE, configure 128bit at a time
+
+#### 1.2.4 DPU (Depth Processing Unit)
+
+- Using 3D structured light depth calculation
+- The maximum resolution of the landscape image is 1920\*1080, and the maximum resolution of the portrait image is 1080\*1440
+- Typical performance is 1280\*800@30fps, 1280\*1080@15fps,1920\*1080@9fps
+- Both read and write AXI bus support crop
+- Support standard axi-4 protocol, data bit width 64bit, address bit width 32bit, burst_length up to 16, read and write outstanding up to 8
+- Support standard apb3.0 protocol, data bit width 32bit, address bit width 32bit
+- Img_check: The precision of the input speckle image is int8, the precision of the output calculation result is int1, and it supports output after downsampling
+- LCN: The precision of the input speckle image is int8, and the precision of the output calculation result is int12, which supports normalized calculation of the source image
+- SAD: Input the normalized speckle image/reference image, the accuracy is int12, the output row and column parallax accuracy is int16, support Init_SAD single/double layer enable, support SAD double layer enable, and support the first layer input of Init_SAD/SAD is involved in the calculation after 1/2 downsampling
+- Post_proc: The precision of the input column parallax is int16, the precision of the output calculation result is int1, supports Post_proc enable, and supports Post_proc inner mask denoising enable
+- Align: The precision of input column parallax is int16, the precision of mask is int1, the precision of output depth/disparity map is int16, the precision of input/output infrared map is int8, supports height block processing parallax/infrared alignment, supports parallax/infrared Alignment enable, support Align inner parallax denoising enable, support parallax/infrared up and down sampling enable, support Disp2depth enable
+- Support normal calculation end interrupt, timeout interrupt, instruction exception interrupt, configuration instruction overflow interrupt, AXI write response exception interrupt
+- Support independent soft reset, interrupt clear operation
+
+#### 1.2.5 Memory
+
+- DDR
+
+ - 16-bit per channel LPDDR4, two channels, the max speed is 3200Mbps
+ - 32-bit LPDDR3 supported,the max speed is 2133Mbps
+ - Maximum capacity: 2GB
+ - Scalable 1:1/1:2 frequency ratio architecture. We setting 1:2 frequency ratio
+ - For LPDDR3 configurations, direct software request control or programmable internal control for ZQ short calibration cycles
+ - For LPDDR3 configurations, support for ZQ long calibration after self-refresh exit
+ - For LPDDR4 configurations, direct software request control or programmable internal control for ZQ calibration cycles
+ - For LPDDR4 configurations, support for ZQ calibration after SR-Powerdown exit
+ - Dynamic scheduling to optimize bandwidth and latency
+ - For maximum SDRAM efficiency, commands are executed out-of-order
+ - Hardware configurable and software programmable Quality of Service (QoS) support
+ - Programmable support for all of the following SDRAM data-bus widths: Full data-bus width or Half of the full data-bus width
+ - Supports max to 2 ranks
+ - Control options to avoid starvation of lower priorities
+ - Guaranteed coherency for write-after-read (WAR) and read-after-write (RAW) hazards (always on the HIF interface and on the AXI interface only if appropriate hardware configuration parameter and software register are set)
+ - Write combine to allow multiple writes to the same address to be combined into a single write to SDRAM; supported for same starting address
+ - Supports automatic SDRAM power-down entry and exit caused by lack of transaction arrival for a programmable time
+ - Supports automatic Clock Stop (LPDDR3/LPDDR4) entry and exit caused by lack transaction arrival
+ - Supports automatic low power mode operation caused by lack of transaction arrival for a rogrammable time through the Hardware Low Power Interface
+ - Flexible address mapper logic to allow application specific mapping of row, column, bank, and rank bits
+ - Leverages out of order requests with CAM to maximize throughput
+ - APB interface for the software accessible registers
+ - 5 host ports using AMBA AXI
+ - Automatic periodic retraining through PHY MASTER Interface
+ - Support for:
+ 1. (LPDDR3, LPDDR4) Command Bus eye training relative to CK
+ 1. Write Leveling to compensate for CK-DQS timing skew
+ 1. Write Training: DQS to DQ
+ Two modes of training are available in LPDDR4:
+ - Command-based FIFO WR/RD with user patterns
+ - An internal DQS clock tree oscillator, to determine the need for, and the magnitude of, required periodic training
+ 1. Data bus VREFDQ training
+ 1. Read training( DQ bit deskew training using DRAM mode registers and DQS to DQ eye centering training using DRAM array)
+ - LVSTL IO calibration and ODT calibration
+ - Support for a SW controllable DQ bit and AC bit swizzling
+ - Firmware-based 2D eye mapping diagnostic tool allows measuring 2D eye for every bit of the bus at both DRAM and host receivers
+ - Direct override programming available for all VREF, ODT, drive strength, and timing delays to facilitate debug and characterization
+
+- SRAM
+ - SRAM:2MB (shared sram)+2MB (default for KPU)
+ - The shared 2MB sram provides access to CPU/KPU/decompression and other modules
+ - The shared 2MB sram has two independent 128bit AXI4 Slave buses. Burst supports incremental, fixed, and wrap. The maximum burst length is 16. Exclusive transmission is not supported. The maximum outstanding read and write are 16 respectively
+ - The shared 2MB sram is divided into two groups. The first group is shared by KPU port0, axi slave0, axi slave1, and decompression module. When decompression does not work, KPU port0 has the highest priority, followed by axi slave0/axi slave1. The other group of KPU port1, axi slave 0, and axi slave 1 are shared. KPU port1 has the highest priority
+ - The decompression module shares 768KB SRAM to cache the decompression process data
+
+- Flash
+
+ - Supports the SPI NOR flash and SPI NAND flash
+ - Supports the read and write operations in internal DMA mode for the SPI NAND flash and the SPI NOR flash.
+ - Support Enhanced (Dual/Quad/Octal) SPI features:
+ - Programmble address,instruction,wait cycles,and data frame size
+ - Dual Data Rate(DDR) support
+ - Read Data Strobe support for DDR transfer
+ - Data item size(4 to 32bits)-Item size of each data transfer under control of the programmer
+ - Execute In Place(XIP) mode support:
+ - AHB address is mapped to SPI NOR flash address directly
+ - Read and write SPI NOR flash directly
+ - Read and write SPI NAND flash need to operate according to the NAND flash operation requirement
+ - Except XIP mode, all operations need to operate according to the flash operation requirement
+ - Programmable delay on the sample time of received serial data bit(rxd)
+ - Programmable clock bit rate
+ - The latency of strb can be adjusted
+
+ **Note:**
+
+ If data frame size is set to 8bit and DDR mode is selected, one clock pulse corresponds to two byte data. So total data length must be set to an even number.
+
+#### 1.2.6 system component
+
+- RMU
+
+ - Reset management module (RMU) is responable for power on reset deglitch, manage wdt reset,chip soft reset and generate sub-module reset
+ - Reset glitch length less than 8ms will be filtered
+ - Manage two watchdog reset and generate soc reset
+ - Manage software soc reset request and generate soc reset
+ - Manage sub-module software reset request and generate sub-module reset
+
+- CMU
+
+ - Clock management module (CMU) is designed to manage generation of sub-module and system clock、clock division、clock switch and clock gating
+ - The clock source include external 24MHz OSC and four internal PLLs
+ - CPU1 and KPU module support DVFS. Their frequency should meet current voltage
+ - When CPU1 and KPU use the same clock source, their frequency can be changed synchronously
+ - When CPU1 and KPU use different clock source, their frequency can be changed independently
+
+- PWR
+
+ - Power control module (PWR) is used for power control of SOC and sub-module
+ - There are five power mode : Power on, sleep0, sleep1, standby, powerdown
+ - There are three kinds of wakeup source : GPIO, PMU and timer
+ - Each power domain can be controlled to power down、power up 、clock gating according to defferent application
+
+- Interrupt
+
+ - K230 supports 208 interrupt sources
+
+- PDMA
+
+ - PDMA (Peripheral Direct Memory Access) supports the data transfer between peripheral ports and DDR/SRAM
+ - PDMA provides 8 channels to transfer different transactions, with 64-byte data buffer per channel
+ - It supports up to 35 peripheral ports through channel configuration
+ - Low power IDLE state of each channel can be set by shutting down corresponding clock
+ - A 64-bit AXI4 master is used to transfer different channel transactions
+ - The priority of each transaction is configured with each channel. Transactions with high priority gets high chance to be transferred
+ - Peripheral data address can only be accessed in 4 bytes aligned with strobe signal to indicate the lower 1/2/4 byte(s) are used, and only fixed address is supported
+
+- SDMA
+
+ - Provides four DMA channels:ch0,ch1,ch2 and ch3
+ - The axi data width is 64-bit
+ - The max axi burst length is 16
+ - Supports configurable axi transaction outstanding numbers: the max outstanding number of ch0,ch2,ch3 is 2, the max outstanding number of ch1 is 16
+ - Supports configurable data endian
+ - Supports data transfer with the linked list
+ - Supports configurable weight-based channel priority arbitration
+ - Supports lowpower mode:each channel supports auto clock gate
+ - Supports specified data transfer for decompression module using ch0 and ch1
+
+- General-puspose timers
+
+ - APB interface supports APB3
+ - Up to six programmable timers
+ - Configurable timer width: 8 to 32 bits
+ - Support for two operation modes: free-running and user-defined count
+ - Support for independent clocking of timers
+ - Configurable polarity for each individual interrupt
+ - Configurable option for a single or combined interrupt output flag
+ - Configurable option to have read/write coherency registers for each timer
+ - connfigurable option to include timer toggle output, which toggles whenever timer counter reloads
+ - Configurable option to enable programmable pulse-width modulation of timer toggle outputs
+ - Configurable option to include pulse width modulation of timer toggle output with 0% and 100%
+ duty cycle.
+ - Can be used to count external input signal with frequency less than 1MHz and ducy cycle from 0~100%
+
+- Stc timer
+
+ - 64 bit timer width
+ - 3 configurable timescale : 27MHz, 1MHz, 90KHz
+ - Configurable enable、load、clear control register
+ - Apb 3.0 interface
+ - One timer can be used for video-input/video-output and audio synchronization.
+ - One timer is used for cpu0 and one timer is used for cpu1.
+ - Timer used for video/audio synchronization provides two sets of timer value, one is old value and the other is latest value
+
+- Watchdog
+
+ - APB3 interface support
+ - Watchdog counter width of 32 bits
+ - Counter counts down from a preset value to 0 to indicate the occurrence of a timeout
+ - If a timeout occurs the watchdog can perform one of the following operations:
+ - Generate a system reset
+ - First generate an interrupt and even if it is cleared (or not) by the service routine by the time a second timeout occurs then generate a system reset
+ - Programmable reset pulse length
+
+- RTC
+
+ - Typical working frequency: external clock source 32768 Hz
+ - Involved in the work mode: normal working mode, independent power supply working mode
+ - Interface type: APB3.0 interface
+ - Support calendar initial value configuration, configuration items including year, month, day, week, when, minutes and seconds
+ - Can read less than 1 second counter count, and the initial values can be configured, minimum scale unit for each calibration cycle of the crystals
+ - Support disruption: a timer interrupt (configurable project includes year, month, day, week,, minutes and seconds), the interrupt for level interrupts, need to register to clear; Periodic interruption (including annual, monthly, daily, weekly, every hour, every minute, every second, every 1/8 of a second, 1/64 of a second trigger interrupt) the interrupts for pulse, pulse width is two 32768 hz clock cycles
+ - Typical application scenario: calendar, timing interrupt trigger interrupt trigger, cycle
+ - Other features: a regular in the system domain, need external power supply; A low speed clock of 32768Hz is required
+
+- Mailbox
+
+ - Bus interface: Mailbox with APB 3.0 interface
+ - Data bit width: 32bit, configurable via APB bus
+ - Configuring the clock: configuring the clock to be the pclk clock
+ - Support for hardware locks
+ - Support for cpu0_sys and cpu1_sys to send interrupts to each other
+ - Support for register configuration and status reading of submodules
+
+- Temperature Sensor
+
+ - ±3°C Accuracy Without Trimming
+ - Supply voltages: VDD 0.72-0.88V, VDDA 1.62-1.98V
+ - Temperature Measurement Range: -40 ~ 125℃
+
+#### 1.2.6 Video input
+
+- Compatible with MIPI 1.2 RX protocol, max up to three 2lane sensors or one 4lane sensor and one 2lane sensor
+- 3 x MIPI CSI
+- Support sensor slave mode
+- Support flash trigger mode which support both follow-strobe mode and pwm mode
+- Support structured light sensor and can separate the IR data and speckle data to different DVP interface.
+- Support timestamp
+- Support HDR sensor
+- Support hardware discard frame
+- 8/10/12/16 Bit Bayer RAW
+
+#### 1.2.7 ISP
+
+- Total throughput:8MP@30fps
+- Auto Focus measurement (AF)
+- Auto White Balance measurement (AWB)
+- Auto Exposure measurement (AE)
+- Advanced 2DNR spatial noise reduction
+- Advanced 3DNR: spatial and temporal noise reduction
+- WDR in single wide dynamic frame
+- Multi-exposure HDR (Native/Built-in HDR interface, 12~16-bit HDR input). The performance is up to 2960x1666@60fps for DOL2 and 1920x1080@90fps for DOL3 HDR.
+- CPD, compand function to support native HDR sensor which performs HDR merging in sensor
+- Variable sensor interface for RGB-Bayer Sensors, DOL or stagger HDR sensors
+- 20-bit HDR Processing, includes multi exposure stitching and local tone mapping
+- Test Pattern Generator (TPG)
+- Black level Compensation
+- Sensor Linear Correction
+- Defect Pixel Cluster Correction (DPCC)
+- Green Equalization
+- Lens Shade Correction (De-Vignetting)
+- De-warping, including fisheye correction, wide field of view (FOV) correction, keystone correction and scaling and 4PTZ view
+- Digital Gain
+- 2-Stage Adaptive Noise Filter (Noise reduction, Sharpness, Blurring)
+- Enhanced Color Interpolation (Bayer De-mosaic filter)
+- Chromatic Aberration Correction (CAC)
+- Color Correction (Xtalk) Matrix (CCM)
+- Color Space Conversion (CSC)
+- Programmable gamma correction for sensor adaptation and display correction
+- Histogram Calculation
+- Anti-flicker
+- Cropping of the output picture (to crop interpolation artifacts), also used for windowing
+- Color Processing: Contrast, Saturation, Brightness, Hue (CPROC)
+- Sharpen/Blur Filter
+- Flash light control
+- Mechanical shutter control
+- Image size: horizontal size multiple of 8 and vertical size multiple of 4
+- Enhanced Chroma Noise Reduction (CNR)
+- Video Stabilization (VSM)
+- Multi-Context Management to support three sensors within a single ISP Core (MCM). In MCM mode, only DVP0 supports HDR
+
+#### 1.2.8 Video output
+
+- 1 x MIPI DSI, 1 x 4 lane or 1 x 2 lane
+- Resolution: 2MP@60fps
+- Support up to 13 layers, including 4 video layers, 8 OSD layers and 1 background layer.
+- Support all common output picture formats: UXVGA (1600x1200), SXVGA (1280x1024), 1080p, 720p
+- Video Layer 0:
+ - support scaling up and scaling down function
+ - support 2-plane, YUV420 data format input
+ - support configurable start pixel & start line input
+ - Support 90 °, 180 °, 270 ° rotation
+ - Support x-mirror/y-mirror function.
+- Video Layer 1:
+ - support 2-plane, YUV420 data format input
+ - support configurable start pixel & start line input
+ - support 90 °, 180 °, 270 ° rotation
+ - Support x-mirror/y-mirror function.
+- Video Layer 2 & Layer 3:
+ - Support 2-plane, YUV420 & YUV422 data format input
+ - Support configurable start pixel & start line input
+ - Do not support scaling function
+- 8 OSD layers support 1 or 2 plane ARGB formats:
+ - RGB888 with separate alpha channel
+ - RGB565 with separate alpha channel
+ - ARGB8888
+ - ARGB4444
+ - ARGB1555
+ - Monochrome(8-bit)
+- Display mix:
+ - OSD layer support configurable global alpha blending or pixel by pixel alpha mode
+ - Video layer only support configurable global alpha
+ - Configurable output size and position for each layer
+- Support vsync interrupt, DPI interface underrun interrupt and configurable output line number interrupt
+- Support configurable color space conversion, yuv2rgb or rgb2yuv
+- Support gamma correction on RGB data before output
+- Support dither function
+
+ **Note**
+- When not using scaling, it is recommended to use layer1 (supports rotation but not scaling)/layer2 (does not support rotation and scaling)/layer3 (does not support rotation and scaling). The video layer can only use three layers
+- When scaling is necessary and layer0 is required, the maximum frame rate at 1080p is 20fps, and 30 frames can be supported at 720p
+
+#### 1.2.9 video codec
+
+ **video encoding**
+ General encoding features
+
+- Maximum encoding performance up to 8MP@20fps
+- Stride support.
+- Horizontal and vertical mirroring.
+- CBR / VBR / CQP / ROI encoding
+- Support for optional rotation of the source frame in 90 degree steps before encoding. Note If YUV422 is rotated by 90 degrees or 270 degrees and not converted to YUV420, the result is encoded as YUV440.
+
+The video processor supports encoding the following source-frame input formats:
+
+- 1-plane YUV422, scan-line format, interleaved in YUYV or UYVY order. Note YUV422 inputs can be converted to YUV420 format.
+- 1-plane RGB, 8-bit, byte address order RGBA, BGRA, ARGB, or ABGR.
+- 2-plane YUV420, scan-line format, chroma interleaved in UV or VU order.
+- 3-plane YUV420, scan-line format.
+- 3-plane YUV420 10-in-16 bit scan line format. Note Support for 3-plane formats is included to help you with testing. Do not use these for maximum performance.
+- YUV420 10-bit, P010, little endian, MSB aligned.
+- YUV420 10-bit, 2 × 2 tile format.
+
+Supported codecs
+
+The following codec standards are supported for encoding:
+
+- HEVC (H.265) Main.
+- HEVC (H.265) Main 10 Profile.
+- H.264 Baseline Profile (BP).
+- H.264 Main Profile (MP).
+- H.264 High Profile (HP).
+- H.264 High 10 Profile.
+- JPEG, baseline sequential, YUV420 and YUV422. Note Only the JPEG codec can encode YUV422.
+- MJPEG
+
+HEVC (H.265) encoding features
+
+- The encoded bitstream complies with the HEVC (H.265) Main Profile.
+- Maximum frame width of 4,096 pixels.
+- Maximum frame height of 4,096 pixels.
+- 8-bit or 10-bit sample depth with I and P frames.
+- Progressive encoding with 64 × 64 CTU size.
+- Tiled mode, up to four tiles, horizontal splits only.
+- Wavefront parallel encoding.
+- The Motion Estimation (ME) search window is ±128 pixels horizontally, ±64 pixels vertically. - ME search down to Quarter Picture ELement (QPEL) resolution.
+- 8 × 8, 16 × 16, and 32 × 32 luma intra-modes.
+- 4 × 4, 8 × 8, and 16 × 16 chroma intra-modes.
+- 8 × 8, 16 × 16, and 32 × 32 inter-modes.
+- 8 × 8, 16 × 16, and 32 × 32 transform size for luma.
+- 4 × 4, 8 × 8, and 16 × 16 transform size for chromas.
+- Skipped CUs, Merge modes.
+- Deblocking.
+- Sample Adaptive Offset (SAO).
+- Constrained intra-prediction selectable.
+- Fixed Quantization Parameters (QP) operation or rate-controlled operation.
+- Rate controlled based on bitrate and buffer size settings. This is also known as leaky bucket.
+- Long term reference frame.
+- Selectable intra-frame refresh interval.
+- Encoders do not prevent the output from exceeding the maximum number of bits per CTU.
+
+H.264 encoding features
+
+- The encoded bitstream complies with the Baseline, Main, High, and High 10 Profiles.
+- Maximum frame width of 4,096 pixels.
+- Maximum frame height of 4,096 pixels.
+- I and P frames.
+- Progressive encoding.
+- Context Adaptive Binary Arithmetic Coding (CABAC) or Context Adaptive Variable Length Coding (CAVLC) entropy coding. Note B frames are not supported with CAVLC entropy coding.
+- The Motion Estimation (ME) search window is ±128 pixels horizontally, ±64 pixels vertically.
+- ME search down to Quarter Picture Element (QPEL) resolution.
+- All 4 × 4, 8 × 8, 16 × 16 luma, and 8 × 8 chroma intra-modes evaluated.
+- 8 × 8, and 16 × 16 inter-modes.
+- 4 × 4 and 8 × 8 transform.
+- Skipped macroblocks.
+- Deblocking.
+- Constrained intra-prediction selectable.
+- Fixed QP operation or rate-controlled operation.
+- Rate controlled based on bitrate and buffer size settings. This is also known as leaky bucket.
+- Long term reference frame.
+- Selectable intra-frame refresh interval.
+- Escaping to prevent Network Abstraction Layer (NAL) unit start code emulation. This is always enabled and is independent of the NAL packet format setting. For more information, see ITU-T H.264 Annex B. Note Encoders do not prevent the output from exceeding the maximum number of bits per macroblock.
+
+ **video decoding**
+ General decoding features
+
+- Maximum decoding performance up to 8MP@40fps
+- Supported source frame output formats are:
+ - 2 plane YUV420 scan line format, chroma interleaved in UV or VU order.
+ - 3 plane YUV420 scan line format. Note Support for 3-plane formats is included to help you with testing. Do not use these for maximum performance.
+ - YUV420 10 bit, P010, little endian, MSB aligned.
+ - YUV420 10 bit, 2 × 2 tile format. Note The YUV buffer and stride must have correct alignment for maximum performance.
+- Stride support for scan-line formats only.
+- Support for rotation of the decoded frame in 90 degree steps before output.
+- Support for downscaling the decoded frame horizontally and vertically by a factor of 2 or 4.
+- Support for downscaling the decoded frame horizontally and vertically by any factor individually. The smallest resolution can be 2 x 2 pixels.
+- Support for output of average frame luminance and chrominance for each 32 x 32 pixel block, for every output display frame.
+
+Supported codecs
+
+The following codec standards are supported for decoding:
+
+- HEVC (H.265) Main/Main10.
+- H.264 Baseline, Main, High, and High10 Progressive Profile.
+- JPEG, baseline sequential, YUV420 and YUV422. Note Only the JPEG codec can decode YUV422.
+
+HEVC (H.265) decoding features
+
+- The decoder is fully compliant to the Main and Main10 Profiles.
+- Maximum frame width is 4,096 pixels.
+- Maximum frame height is 4,096 pixels.
+- Error concealment is performed in case of bit errors.
+- Stream parameter information is output.
+
+H.264 decoding features
+
+- Baseline, Main, High, and High 10 progressive Profiles.
+- For progressive streams
+ - Average bitrates up to 100MBit/s.
+ - Maximum frame width is 4,096 pixels.
+ - Maximum frame height is 4,096 pixels.
+- For interlaced streams
+ - Average bitrates up to 50MBit/s.
+ - A maximum frame width of 2,048 pixels.
+ - A maximum frame height of 4,096 pixels.
+- Error concealment is performed in case of bit errors.
+- Stream parameter information is output. Escaping to prevent NAL unit start code emulation is always expected. This is independent of the NAL packet format setting. For more information, see ITU T H.264 Annex B.
+
+JPEG decoding features
+
+- Average bitrates up to 20MBit/s.
+- Support for 4:2:0 output by the video encoder, baseline sequential YYYYCbCr interleaved MCU format only.
+- Support for 4:2:2 output by the video encoder, baseline sequential YYCbCr interleaved MCU format only.
+- Maximum frame width is 8,192 pixels.
+- Maximum frame height is 8,192 pixels.
+- Error concealment is performed in case of bit errors.
+
+#### 1.2.10 2.5D GPU
+
+- Support following Hardware Components
+ - Command list based DMAs, Fire and Forgot Control mechanism to minimize CPU overhead
+ - Primitive Rasterizer, 16x Anti-aliasing without performance drop.
+ - Texture Mapping Unit, 4 Texel/cycle in Bi-linear filter
+ - Hardware composition, Frame buffer compression
+ - Tessellation, No CPU Involved in Bezier Curve generation
+ - Alpha blending
+- Support Image Transformation
+ - Texture mapping, Point sampling, Bilinear filtering
+ - Blit support, Stretch (independently on x and y axis)
+ - Rotation any angle, Mirroring, FP24 coordinate precision, no precision difference in any degree rotation
+ - 2.5D Perspective Correct Projections
+ - Configurable Coordinate Systems and Transformations (3x3 matrix)
+ - Scissoring and viewport clipping, Mage Interpolation, Paint
+ - Odd/even and non-zero fill rules
+- Support draw engine
+ - Pixel / Line drawing with any degree
+ - Gradient Filled rectangles
+ - Triangles, Polygon
+ - Path Generation
+ - Linear gradient paint paths
+- Support following Color Formats
+ - 32-bit RGBA8888 / BGRA8888 / ABGR8888
+ - 16-bit RGBA5551 / RGB565
+ - 8-bit Α8 / L8 / RGB332, 4-bit A4 / L4 & 2-bit A2 / L2 & 1-bit A1 / L1
+ - 1/2/4/8-bit index format
+- Support Antialiasing
+ - 16x MSAA(4x4), no quality difference betwwen horizon and vertical direction
+ - 8x MSAA(4x2), low cost version, horizon quality is better than veritical directon
+
+#### 1.2.11 Audio
+
+K230 audio supports the following features:
+
+- Audio codec inside
+- 2 DAC channels for stereo playback with sample rate 8-192Khz
+- 2 ADC channels for stereo recording from microphone with sample rate 8-192Khz
+- Audio codec support Automatic Level Control (ALC) function to adjust the signal level,which is input into ADC
+- Maximum 8 x PDM DMIC inputs
+- I2S interface supports 2x2 expansion
+- Support master mode, which means clock(pdm_clk and i2s_sclk) and ws(only I2S) are output from audio.
+- I2S input, pdm input and I2s output audio modes can work simultaneously
+- APB2.0 interface is used to configure registers, and read/write PCM data. The default frequency of configurable APB working clock PCLK is 100MHz, and the data interface is 32 bits
+- PCM data can be transferred by PDMA. Burst length in PDMA is configurable
+- The audio module can start working again after being disabled and re-enabled
+- The audio module can start working again after asserting reset and de-asserting reset
+- PDM audio
+ - PDM audio input with data sampling rate of 2.048/2.8224 MHz, 1-bit data width, sampling clock rate of 0.256MHz/0.384MHz/0.512MHz/0.768MHz/1.024MHz/1.4112MHz/1.536MHz/2.048MHz/2.8224MHz/3.072MHz/4.096MHz/5.6448MHz/6.144MHz/12.288MHz/24.576MHz, corresponding PCM sampling rate of 8kHz/12kHz/16kHz/24kHz/32kHz/44.1kHz/48kHz/96kHz/192kHz
+ - Oversampling rate is configurable with x128, x64 and x32
+ - 1-4 IOs are used for input PDM audio
+ - The input can be configured with 1-8 PDM channels. It supports left/right mono mode and dual mode of PDM. All IO channel modes are unified. The maximum number of IO in dual mode is 4
+ - The serial numbers of enabled channels are from small to big. Random enabling of each channel is not supported
+ - The skew between PDM input data and pdm_clk is up to 18 PCLK cycles
+ - Conversion from input PDM audio data to PCM audio data
+- I2S audio
+ - PCM audio in I2S Phillips, left-aligned and right-aligned format
+ - I2S audio input/output with data sampling rate of 8kHz/12kHz/16kHz/24kHz/32kHz/44.1kHz/48kHz/96kHz/192kHz, and data width of 32 bits. The valid data width(32/24/20/16/12bits) needs to be customized. The sampling clock rate supports 2×32(data width)×data sampling rate
+ - 1-2 IO to input, and 1-2 IO to output I2S audio data. The full-duplex mode is supported
+ - Connect to on-chip or off-chip i2s codec to input and output audio data
+ - Each RX/TX channel FIFO depth is 8. FIFO threshold can be configured
+ - DMA mode enable and disable
+ - IO number and left/right channel flag can be fetched from higher bits of data when valid data width is less than 32bits in DMA mode
+
+#### 1.2.12 peripheral
+
+- UART
+ - Support 5 UART interface
+ - 9-bit serial data support
+ - False start bit detection
+ - Programmable fractional baud rate support
+ - APB data bus widths of 32
+ - Additional DMA interface signals for compatibility with DMA interface, DMA interface signal active low
+ - Transmit and receive FIFO depths of 32, Supports 32x32-bit transmit first-in, first-out (FIFO) and 32x32-bit RX FIFO, Internal FIFO (RAM)
+ - Busy functionality
+ - Functionality based on the 16550 industry standard
+ - Programmable character properties, such as:
+ - Number of data bits per character (5-8)
+ - Optional parity bit (with odd, even select or Stick Parity)
+ - Number of stop bits (1, 1.5 or 2)
+ - Line break generation and detection
+ - DMA signaling with two programmable modes
+ - Prioritized interrupt identification
+ - Programmable FIFO enable/disable
+ - Separate system resets for each clock domain to prevent metastability
+
+- I2C
+ - Support 5 I2C interface
+ - Two-wire I2C serial interface–consists of a serial data line (SDA) and a serial clock (SCL)
+ - Three speeds:
+ - Standard mode (0 to 100 Kb/s)
+ - Fast mode (≤400 Kb/s) or fast mode plus (≤1000 Κb/s)
+ - High-speed mode (≤3.4 Mb/s)
+ - Clock synchronization
+ - Master I2C
+ - 7- or 10-bit addressing
+ - 7- or 10-bit combined format transfers
+ - Bulk transmit mode
+ - Transmit and receive buffers
+ - 32x32 bits TX FIFOs and 64x8 bits RX FIFOs
+ - Interrupt or polled-mode operation
+ - Handles Bit and Byte waiting at all bus speeds
+ - DMA operation.
+ - Programmable SDA hold time (tHD;DAT)
+ - Bus clear feature
+ - Device ID feature
+ - Support for APB data bus widths of 32 bits
+
+- PWM
+
+ - Support 6 channel
+ - Interface of APB 3.0, width 32 bit data; Slave Error response is not supported
+ - Support arbitrary duty ratio
+ - Support programmable output waveform (support two adjacent channel output waveform and even)
+ - Support produce periodic pulse signal of pulse signal and one-time
+ - Precise interruption generator can be used as a cycle
+ - Support output burr elimination
+
+- GPIO (multiplexed with function pins):
+ - 64 x GPIO + 8 x PMU GPIO
+ - 50 x GPIO + 6 x PMU GPIO(SIP)
+ - Separate data registers and data direction registers for each signal
+ - Configurable hardware and software control for each signal, or for each bit of each signal Separate auxiliary data input, data output, and data control for each I/O in Hardware Control mode. As output, each GPIO can be set to 0 or 1 separately.
+ - Independently controllable signal bits
+ - Configurable interrupt mode for GPIO group0 and GPIO group1. As input, each GPIO pin can act as an interrupt source. IO both edge interrupts.
+ - Configurable debounce logic with an external slow clock to debounce interrupts
+ - Option to generate single or multiple interrupts
+ - Configurable reset values on output signals
+ - Configurable synchronization of interrupt signals
+ - 32-bit APB width
+
+- USB
+
+ - Support 2 USB 2.0 OTG
+ - Support for the following speeds:High-Speed (HS, 480-Mbps),Full-Speed (FS, 12-Mbps) and Low-Speed (LS, 1.5-Mbps) modes
+ - Multiple options available for low power operations
+ - DMA mode access support on the application side
+ - Supports up to 6 bidirectional endpoints, including control endpoint 0
+ - Supports the Keep-Alive in Low-Speed mode and SOFs in High/Full-Speed modes
+ - The USB 2.0 modules supports the following transfer types:Control transfer,Bulk transfer,Interrupt transfer,isochronous transfer
+ - Internal DMA mode has two modes of operation: Buffer DMA mode and Scatter/Gather DMA mode
+ - Total Data FIFO RAM Depth is 3072
+ - Not support ADP/HNP/SRP/Battery Charger
+
+- SD/EMMC
+ - Support 2 SDxC: SD3.01, eMMC 5.0
+ - The eMMC/SD/SDIO controller features as below.
+
+ - Supports SD memory and SD Input/Output (SDIO) digital interface protocol, and compliant with SD HCI specification
+ - Uses the same SD-HCI register set for eMMC transfers
+ - Supports eMMC protocols including eMMC 5.1
+ - Supports SD-HCI Host version 3 mode or less
+ - Supports the following data transfer types for SD, eMMC modes:
+ - CPU
+ - SDMA
+ - ADMA2
+ - ADMA3
+ - Supports independent controller, AMBA Slave interface and Master Interface clocks
+ - Supports gating of controller base clock if Host Controller is inactive
+ - Support context aware functional clock gates
+ - Applications can gate the slave interface clock if Host Controller is inactive
+ - Supports interrupt enabling and masking
+ - Supports Command Queuing Engine (CQE) and compliant with eMMC CQ HCI
+ - Programmable scheduler algorithm selection of task execution
+ - Supports data prefetch for back-to-back WRITE operations
+ - Supports auto-tuning
+ - Support clock gating
+
+ - Support features for interfaces
+
+ - SD
+ - Supports 4-bit interface
+ - Supports UHS-I mode
+ - Supports Default Speed (DS), high-speed (HS), SDR12, SDR25, SDR50 and SDR104 speed modes
+ - Supports SDIO read wait
+ - Supports SDIO card interrupts in both 1-bit and 4-bit modes
+ - Wake up on card interrupt
+ - eMMC
+ - Supports 4-bit/8-bit interface
+ - Supports legacy, high-speed SDR, high-speed DDR, HS200, and HS400 speed modes
+ - Supports boot operation and alternative boot operation
+
+- SPI
+ - Support 3 SPI interface : 1 x OSPI + 2 x QSPI
+ - Supports AHB Slave Interface for software programming(AMBA 3)
+ - Supports AXI Master Interface for Internal DMA transfers
+ - AMBA 3 AXI
+ - AXI data width : 64
+ - AXI address width : 32
+ - Supports two separate FIFOs. One acts as an RX FIFO and the other one acts as a TX FIFO. Each of them is 256-location deep
+ - Enhanced SPI features (Dual/Quad/Octal for OSPI, Dual/Quad for QSPI)
+ - Programmble address,instruction,wait cycles,and data frame size
+ - Supports programmable serial data frame length: 4 bits to 32 bits
+ - Programmable delay on the sample time of received serial data bit(rxd)
+ - Programmable clock bit rate
+
+#### 1.2.13 security
+
+- Support PUF / OTP / TRNG
+- Support following symmetric algorithm
+ - AES128/192/256
+ - CMAC128/192/256
+ - SM4-128
+
+- Support following asymmetric algorithm
+ - RSA-1024/2048/3072/4096
+ - RSA encrypt/decrypt/signature/verify
+ - ECC-163/233/283/409/571/192/224/256/384/521
+ - ECDSA-233/283/409/571/224/256/384/521
+ - ECC CDH-163/233/283/409/571/192/224/256/384/521
+ - SM2 encrypt/decrypt/signature/verify
+
+- Support following hash algorithm
+ - HMAC
+ - SHA224/256/384/512, SHA_512/224, SHA_512/256
+ - SM3
+
+- TRNG
+ - 160Mbps@20Mhz
+ - Stabilization time minimum than 50us
+
+- OTP program region has raw OTP density 32Kbits, with security protection
+- Support security boot with signature
+
+#### 1.2.14 PMU
+
+- Support RTC function in 32Khz
+- Support the default 6 inputs and 2 outputs
+- Support IO configurable, reusable as GPIOs, the highest rate of up to 25 MHZ
+- Support a set of long and short press detection function which can be used as system shutdown or wakeup signal
+- Support a set of edge number counter which can be regularly cleared
+- Support two sets of edge and level detection with debounce function
+- Support four groups of edge and level detection
+- Support configurable interrupt operation
+- Support 512 bits system log when it is been shutdown
+- Support two sets of output IOs with configurable delay time
+
+#### 1.2.15 Others
+
+- decompression
+
+ - Decompression accelerator is mainly used to implement hardware GZIP decompression function.
+ - Decompression bandwidth ≥ 400MB/s
+ - Support GZIP file format version 4.3
+ - Support DEFLATE compressed file version 1.3
+ - The maximum dictionary size is 32KB
+ - Support the minimum word matching length of 3Byte and the maximum word matching length of 258Byte
+ - Only dynamic huffman compression mode is supported
+ - Support data stream CRC32 verification
+ - Support hardware to automatically generate dynamic huffman tree
+ - The APB3 register interface is used to configure the startup decompression accelerator
+ - Request the DMA controller to transfer large blocks through hardware, and request to transfer 32Kbyte at most once
+
+- FFT/IFFT
+
+ - Support maximum 4096 point fft, ifft calculation
+ - Support int16 calculation accuracy, the real and imaginary parts of input and output are both in int16 format
+ - Support the standard axi4 slave interface, which is used for parameter configuration and data transfer.
+ - The input supports RIRI...., RRRR.... (singal real part), RRRR...IIII... format arrangement, and the output supports RIRI...., RRRR...IIII... format arrangement
+ - It adopts the calculation method of base 2-time decimation, and there is only one butterfly operator inside
+ - A single clock domain design is adopted, and the bus clock is also used as the operation clock
+ - The calculation time of 4096-point fft/ifft is controlled within 1ms, including the total overhead of data movement, calculation, and interrupt interaction
+ - Support interrupt mask, original interrupt query
+
+- Fastboot: 3A first picture ≤ 400ms
+- Working environment temperature: -40 ~ 85°C
+
+### 1.3 Block Diagram
+
+Figure 1-3-1 K230 block diagram
+
+
+
+## Chapter 2 Package Information
+
+K230 have two types of package, one is K230 that has a single die, the other is K230D that merges a 1Gb LPDDR4.
+
+## 2.1 K230
+
+Figure 2-1-1 K230 Package
+
+
+
+### 2.2 K230D
+
+Figure 2-2-1 K230D Package
+
+
+
+### 2.3 Pin information description
+
+This part please refer to《K230_PINOUT_V1.0_20230524》document.
+
+## chapter 3 Electrical Specification
+
+### 3.1 Absolute Max Rating
+
+Table 3-1-1 Absolute Max Rating
+
+| | Power Parameter | Min | Max | Units |
+| ------------ |:--------------- | ---- | --------------- | ----- |
+| PMU | AVDD1P8_RTC | -0.1 | 1.98 | V |
+| PMU | AVDD1P8_LDO | -0.1 | 1.98 | V |
+| CORE | VDD0P8_CORE | -0.1 | 0.88 | V |
+| CPU | VDD0P8_CPU | -0.1 | 0.88 | V |
+| KPU | VDD0P8_KPU | -0.1 | 0.88 | V |
+| DDR | VDD0P8_DDR_CORE | -0.1 | 0.88 | V |
+| DDR | VDD1P1_DDR_IO | -0.1 | 1.21/1.32/1.485 | V |
+| DDR | VAA_DDR | -0.1 | 1.98 | V |
+| IO | VDDIO3P3_0 | -0.1 | 1.98/3.63 | V |
+| IO | VDDIO3P3_1 | -0.1 | 1.98/3.63 | V |
+| IO | VDDIO3P3_2 | -0.1 | 1.98/3.63 | V |
+| IO | VDDIO3P3_3 | -0.1 | 1.98/3.63 | V |
+| IO | VDDIO3P3_4 | -0.1 | 1.98/3.63 | V |
+| IO | VDDIO3P3_5 | -0.1 | 1.98/3.63 | V |
+| USB | AVDD3P3_USB | -0.1 | 3.63 | V |
+| USB | AVDD1P8_USB | -0.1 | 1.98 | V |
+| PLL | AVDD0P8_PLL | -0.1 | 0.88 | V |
+| MIPI | AVDD0P8_MIPI | -0.1 | 0.88 | V |
+| MIPI | AVDD1P8_MIPI | -0.1 | 1.98 | V |
+| ADC | AVDD1P8_ADC | -0.1 | 1.98 | V |
+| AUDIO CODEC | AVDD1P8_CODEC | -0.1 | 1.98 | V |
+| MMC | VDD3P3_SD | -0.1 | 3.63 | V |
+| SYSTEM | VDD1P8 | -0.1 | 1.98 | V |
+| K230D LPDDR4 | VDD1P8_DDR_VDD1 | -0.1 | 1.98 | V |
+| K230D LPDDR4 | VDD1P1_DDR_VDD2 | -0.1 | 1.21 | V |
+| K230D LPDDR4 | VDD1P1_DDR_VDDQ | -0.1 | 1.21 | V |
+
+### 3.2 Recommended Operating Condition
+
+Table 3-2-1 Recommended operating conditions for power supplies
+
+| Module | Parameter | Min | Typical | Max | Units |
+| ------------ |:--------------- | --------------- | ------------ | --------------- | ----- |
+| PMU | AVDD1P8_RTC | 1.674 | 1.8 | 1.98 | V |
+| PMU | AVDD1P8_LDO | 1.674 | 1.8 | 1.98 | V |
+| CORE | VDD0P8_CORE | 0.72 | 0.8 | 0.88 | V |
+| CPU | VDD0P8_CPU | 0.72 | 0.8 | 0.88 | V |
+| KPU | VDD0P8_KPU | 0.72 | 0.8 | 0.88 | V |
+| DDR | VDD0P8_DDR_CORE | 0.744 | 0.8 | 0.88 | V |
+| DDR | VDD1P1_DDR_IO | 1.06/1.14/1.283 | 1.1/1.2/1.35 | 1.21/1.32/1.485 | V |
+| DDR | VAA_DDR | 1.674 | 1.8 | 1.98 | V |
+| IO | VDDIO3P3_0 | 1.62/2.97 | 1.8/3.3 | 1.98/3.63 | V |
+| IO | VDDIO3P3_1 | 1.62/2.97 | 1.8/3.3 | 1.98/3.63 | V |
+| IO | VDDIO3P3_2 | 1.62/2.97 | 1.8/3.3 | 1.98/3.63 | V |
+| IO | VDDIO3P3_3 | 1.62/2.97 | 1.8/3.3 | 1.98/3.63 | V |
+| IO | VDDIO3P3_4 | 1.62/2.97 | 1.8/3.3 | 1.98/3.63 | V |
+| IO | VDDIO3P3_5 | 1.62/2.97 | 1.8/3.3 | 1.98/3.63 | V |
+| USB | AVDD3P3_USB | 3.07 | 3.3 | 3.63 | V |
+| USB | AVDD1P8_USB | 1.674 | 1.8 | 1.98 | V |
+| PLL | AVDD0P8_PLL | 0.72 | 0.8 | 0.88 | V |
+| MIPI | AVDD0P8_MIPI | 0.744 | 0.8 | 0.88 | V |
+| MIPI | AVDD1P8_MIPI | 1.674 | 1.8 | 1.98 | V |
+| ADC | AVDD1P8_ADC | 1.62 | 1.8 | 1.98 | V |
+| AUDIO CODEC | AVDD1P8_CODEC | 1.62 | 1.8 | 1.98 | V |
+| MMC | VDD3P3_SD | 2.7 | 3.3 | 3.63 | V |
+| SYSTEM | VDD1P8 | 1.62 | 1.8 | 1.98 | V |
+| K230D LPDDR4 | VDD1P8_DDR_VDD1 | 1.7 | 1.8 | 1.98 | V |
+| K230D LPDDR4 | VDD1P1_DDR_VDD2 | 1.06 | 1.1 | 1.21 | V |
+| K230D LPDDR4 | VDD1P1_DDR_VDDQ | 1.06 | 1.1 | 1.21 | V |
+
+### 3.3 DC Characteristics
+
+#### 3.3.1 Electrical Characteristics for General IO
+
+Table 3-3-1 Electrical Characteristics for General IO
+
+
+
+#### 3.3.2 Electrical Characteristics for PLL
+
+Table 3-3-2 Electrical Characteristics for PLL
+
+| Parameter | Description | Min | Type | Max | Units |
+| --------- | --------------------------------- | ---- | ---- | --- | ------------------------- |
+| Fref | Divided reference frequency range | 488K | | 4G | Hz |
+| Fout | Total output frequency range | 50M | NA | 4G | Hz |
+| Fvco | VCO frequency range | 800M | NA | 4G | Hz |
+| Tlt | Lock time | 500 | | | div referency clock cycle |
+| Ijitter | input jitter | | 2% | | div referency clock cycle |
+
+### 3.3.3 Electrical Characteristics for DDR
+
+Table 3-3-3 common DC input conditions
+
+| Parameter | Symbol | Unit | Minimum | Typical | Maximum |
+| ------------------------------------------------- | ------ | ---- | --------- | ------- | --------- |
+| Vref input leakage current | IIZ | uA | | | 50 |
+| BP_DAT input leakage current | IIZ | uA | | | 50 |
+| Input high voltage for BP_DAT* | VIH-DC | V | Vref+0.02 | | |
+| Input low voltage for BP_DAT* | VIL-DC | V | | | Vref-0.02 |
+| Differential input voltage for abs(DQS_t – DQS_c) | VID-DC | V | 0.1 | | |
+| | | | | | |
+| Note: | | | | | |
+
+1. BP_DAT *represent the DDR_DQ* Pins
+1. BP_A *represent the DDR_CA* Pins
+
+Table 3-3-4 common AC input conditions
+
+| Parameter | Symbol | Unit | Minimum | Typical | Maximum |
+| ----------------------------- | ------- | ---- | ------- | ------- | ------- |
+| Input capacitance DQ | CpadDQ | pF | 1.54 | 1.62 | 1.76 |
+| Input capacitance DQS | CpadDQS | pF | 1.44 | 1.56 | 1.66 |
+| Input capacitance,address/cmd | CpadAC | pF | 1.71 | 1.81 | 1.94 |
+| | | | | | |
+| Note: | | | | | |
+
+1. This is specified at the top level of the DBYTE and ACX4 blocks. It does not include any customer-supplied routing between these blocks and the C4 bump.
+1. Effective parallel capacitance when ODT of 60ohm is enabled。
+
+Table 3-3-5 common input conditions
+
+| Parameter | Symbol | Unit | Minimum | Maximum |
+| -------------------------------------------- | -------------- | ---- | ------- | ------- |
+| M_DQ edge arrival relative to M_DQS,800MT/s | tDQSDQRead800 | UI | -0.39 | 0.39 |
+| M_DQ edge arrival relative to M_DQS,1066MT/s | tDQSDQRead1066 | UI | -0.38 | 0.38 |
+| M_DQ edge arrival relative to M_DQS,1333MT/s | tDQSDQRead1333 | UI | -0.37 | 0.37 |
+| M_DQ edge arrival relative to M_DQS,1600MT/s | tDQSDQRead1600 | UI | -0.36 | 0.36 |
+| M_DQ edge arrival relative to M_DQS,1866MT/s | tDQSDQRead1866 | UI | -0.35 | 0.35 |
+| M_DQ edge arrival relative to M_DQS,2133MT/s | tDQSDQRead2133 | UI | -0.34 | 0.34 |
+| M_DQ edge arrival relative to M_DQS,2400MT/s | tDQSDQRead2400 | UI | -0.33 | 0.33 |
+| M_DQ edge arrival relative to M_DQS,2667MT/s | tDQSDQRead2667 | UI | -0.32 | 0.32 |
+| M_DQ edge arrival relative to M_DQS,3200MT/s | tDQSDQRead3200 | UI | -0.31 | 0.31 |
+
+Note:
+
+1. This timing parameter applies to all BP_DAT DQ bits within a related DQ byte
+1. A larger range implies more margin for channel and DRAM timing effects
+1. Per lane deskew training can correct for static skew, up to deskew limits
+1. Refer to the receiver timing budget in the Signal and Power Integrity Application Note for more information
+
+Table 3-3-6 LPDDR3 DC input conditions
+
+| Parameter | Symbol | Unit | Minimum | Typical | Maximum |
+| ------------------------------------------------- | ---------- | ---- | ---------------------------- | -------- | ------- |
+| Reference voltage | Vref | V | | Variable | |
+| DC reference voltage error | VrefDC-err | VDDQ | -0.75% | | 0.75% |
+| On-die termination (ODT) programmable resistances | RTT | ohm | open, 240,120, 80, 60,48, 40 | | |
+| ODT low-level (0.5*VDDQ) largesignal resistance | RODT-L/RTT | | 0.9 | 1.0 | 1.1 |
+| ODT mid-level (0.8*VDDQ) largesignal resistance | RODT-M/RTT | | 0.8 | | 1.05 |
+| ODT high-level (1.1*VDDQ) largesignal resistance | RODT-H/RTT | | 0.75 | | 1.05 |
+
+Table 3-3-7 LPDDR3 AC input conditions
+
+| Parameter | Symbol | Unit | Minimum | Typical | Maximum |
+| ---------------------------------------------------- | ------------- | ---- | ------------ | ------- | ------------ |
+| Reference voltage | VrefAC-err | VDDQ | -0.25% | | 0.25% |
+| Low-speed Input high voltage for BP_DAT (logic 1) | VIH-ACLS | V | Vref + 0.070 | | VDDQ +0.15 |
+| Low-speed Input low voltage for BP_DAT (logic 0) | VIL-ACLS | V | -0.15 | | Vref - 0.070 |
+| High-speed input high voltage for BP_DAT (logic 1) | VIH-ACHS | V | Vref + 0.070 | | Vref + 0.440 |
+| High-speed input low voltage for BP_DAT (logic 0) | VIL-ACHS | V | Vref - 0.440 | | Vref - 0.070 |
+| ODT low-level (0.5*VDDQ) smallsignal resistance | RODTss-M /RTT | | 0.95 | | 1.75 |
+| ODT mid-level (0.8*VDDQ) smallsignal resistance | RODTss-M /RTT | | 0.85 | | 1.05 |
+| ODT high-level (1.1*VDDQ) smallsignal resistance | RODTss-H /RTT | | 0.75 | | 1.05 |
+| Input crossing voltage for differential signals DQS* | VIX | mV | VDQSavg-75 | VDQSavg | VDQSavg +75 |
+
+Table 3-3-8 LPDDR4 DC input conditions
+
+| Parameter | Symbol | Unit | Minimum | Typical | Maximum |
+| ------------------------------------------------- | ---------- | ---- | ---------------------------- | -------- | ------- |
+| Reference voltage | Vref | V | | Variable | |
+| DC reference voltage error | VrefDC-err | VDDQ | -0.75% | | 0.75% |
+| On-die termination (ODT) programmable resistances | RTT | ohm | open, 240,120, 80, 60,48, 40 | | |
+| ODT mid-level (0.25*VDDQ) largesignal resistance | RODT-M/RTT | | 0.8 | | 1.1 |
+| ODT high-level (0.5*VDDQ) largesignal resistance | RODT-H/RTT | | 0.9 | 1.0 | 1.1 |
+
+Table 3-3-9 LPDDR4 AC input conditions
+
+| Parameter | Symbol | Unit | Minimum | Typical | Maximum |
+| ---------------------------------------------------- | ------------- | ---- | ------------ | ------- | ------------ |
+| Reference voltage | VrefAC-err | VDDQ | -0.25% | | 0.25% |
+| Low-speed Input high voltage for BP_DAT (logic 1) | VIH-ACLS | V | Vref + 0.070 | | VDDQ +0.15 |
+| Low-speed Input low voltage for BP_DAT (logic 0) | VIL-ACLS | V | -0.15 | | Vref - 0.070 |
+| High-speed input high voltage for BP_DAT (logic 1) | VIH-ACHS | V | Vref + 0.070 | | Vref + 0.440 |
+| High-speed input low voltage for BP_DAT (logic 0) | VIL-ACHS | V | Vref - 0.440 | | Vref - 0.070 |
+| ODT mid-level (0.25*VDDQ) smallsignal resistance | RODTss-M /RTT | | 0.9 | | 1.1 |
+| ODT high-level (0.5*VDDQ) smallsignal resistance | RODTss-H /RTT | | 0.95 | | 1.75 |
+| Input crossing voltage for differential signals DQS* | VIX | mV | VDQSavg-75 | VDQSavg | VDQSavg +75 |
+
+#### 3.3.4 Electrical Characteristics for MIPI DSI
+
+Table 3-3-10 Supply Requirements
+
+| Symbol | Parameter | Condition | Minimum | Typical | Maximum | Unit |
+| ------ | ------------------ | --------- | ------- | ------- | ------- | ---- |
+| Vslew | Supplies slew rate | | | | 0.1 | V/μs |
+
+Table 3-3-11 Input DC Specifications
+
+| Symbol | Parameter | Condition | Minimum | Typical | Maximum | Unit |
+| ---------------------------------- | ---------------------------------------- | --------------------------------------------------------------------------- | ------- | ------- | ------- | ---- |
+| Apply to CLKP/N and DATAP/N Inputs | | | | | | |
+| VI | Input signal voltage range | | -50 | | 1350 | mV |
+| ILEAK | Input leakage current | VGNDSH(min) ≤ VI ≤ VGNDSH(max) + VOH(absmax) Lane module in LP receive mode | -10 | | 10 | μA |
+| VGNDSH | Ground shift | | -50 | | 50 | mV |
+| VOH(absmax) | Maximum transient output voltage level | | -0.15 | | 1.45 | V |
+| tVOH(absmax) | Maximum transient time above VOH(absmax) | | | | 20 | ns |
+
+Table 3-3-12 HS Line Drivers DC Specifications
+
+| Symbol | Parameter | Condition | Minimum | Typical | Maximum | Unit |
+| ---------------- | ----------------------------------------------------------------------- | -------------------------------------------------------------------------------------------------- | ------- | ------- | ------- | ---- |
+| |VOD| | HS Transmit Differential output voltage magnitude | 80 Ω ≤ RL ≤ 125 Ω Note: can be programmed using test control register 0x24(cb_sel_v400_prog[2:0]). | 140 | 200 | 270 | mV |
+| ∆|VOD| | Change in Differential output voltage magnitude between logic states | 80 Ω ≤ RL ≤ 125 Ω | | | 14 | mV |
+| VCMTX | Steady-state common-mode output voltage | 80 Ω ≤ RL ≤ 125 Ω | 150 | 200 | 250 | mV |
+| ∆VCMTX(1,0) | Changes in steady-state common-mode output voltage between logic states | 80 Ω ≤ RL ≤ 125 Ω | | | 5 | mV |
+| VOHHS | HS output high voltage | 80 Ω ≤ RL ≤ 125 Ω | | | 360 | mV |
+| ZOS | Single-ended output impedance | | 40 | 50 | 62.5 | Ω |
+| ∆ZOS | Single-ended output impedance mismatch | | | | 10 | % |
+
+Table 3-3-13 LP Line Drivers DC Specifications
+
+| Symbol | Parameter | Minimum | Typical | Maximum | Unit |
+| ------------ | ------------------------------------------------------------- | ------- | ------- | ------- | ---- |
+| VOL | Output low-level SE voltage | -50 | | 50 | mV |
+| VOH | Output high-level SE voltage | 1.1 | 1.2 | 1.3 | V |
+| ZOLP | Single-ended output impedance | 110 | | | Ω |
+| ∆ZOLP(01,10) | Single-ended output impedance mismatch driving opposite level | | | 20 | % |
+| ∆ZOLP(00,11) | Single-ended output impedance mismatch driving same level | | | 5 | % |
+
+Table 3-3-14 LP Line Receiver DC Specifications
+
+| Symbol | Parameter | Minimum | Typical | Maximum | Unit |
+| -------- | ------------------------------ | ------- | ------- | ------- | ---- |
+| VIL | Input low voltage, not in ULPS | | | 550 | mV |
+| VIL-ULPS | Logic 0 input voltage, ULPS | | | 300 | mV |
+| VIH | Input high voltage | 740 | | | mV |
+| VHYST | Input hysteresis | 25 | | | mV |
+
+Table 3-3-15 Contention Line Receiver DC Specifications
+
+| Symbol | Parameter | Minimum | Typical | Maximum | Unit |
+| ------ | -------------------------- | ------- | ------- | ------- | ---- |
+| VILF | Input low fault threshold | | | 200 | mV |
+| VIHF | Input high fault threshold | 450 | | | mV |
+
+#### 3.3.5 Electrical Characteristics for MIPI CSI
+
+Table 3-3-16 Supply Requirements
+
+| Symbol | Parameter | Condition | Minimum | Typical | Maximum | Unit |
+| ------ | ------------------ | --------- | ------- | ------- | ------- | ---- |
+| Vslew | Supplies slew rate | -- | -- | -- | 0.1 | V/μs |
+
+Table 3-3-17 Input DC Specifications
+
+| Symbol | Parameter | Minimum | Typical | Maximum | Unit | Notes |
+| ---------------------------------- | ---------------------------------------- | ------- | ------- | ------- | ---- | ------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- |
+| Apply to CLKP/N and DATAP/N Inputs | | | | | | |
+| VPIN | Pin signal voltage range | -50 | | 1350 | mV | |
+| ILEAK | Pin leakage current | -10 | | 10 | µA | VGNDSH(min) ≤ VPIN ≤ VGNDSH(max) + VOH(absmax) Lane module in LP receive mode |
+| VGNDSH | Ground shift | -50 | | 50 | mV | |
+| VPIN(absmax) | Maximum transient output voltage level | -0.15 | | 1.45 | V | |
+| VPIN(absmax) | Maximum transient time above VOH(absmax) | | | 20 | ns | The voltage overshoot and undershoot beyond the VPIN is only allowed during a single 20ns window after any LP-0 to LP-1 transition or vice versa. For all other situations the voltage overshoot and undershoot must stay within the VPIN range. |
+
+Table 3-3-18 HS Line Receiver DC Specifications
+
+| Symbol | Parameter | Minimum | Typical | Maximum | Unit | Notes |
+| ------- | ----------------------------------------- | ------- | ------- | ------- | ---- | ------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- |
+| VIDTH | Differential input high voltage threshold | | | 70 | mV | D-PHY spec 1.1 compatibility mode (<=1.5Gbps) |
+| VIDTH | Differential input high voltage threshold | | | 40 | mV | In case of High-Speed deskew calibration (>1.5Gbps) |
+| VIDTL | Differential input low voltage threshold | -70 | | | mV | D-PHY spec 1.1 compatibility mode (<=1.5Gbps) |
+| VIDTL | Differential input low voltage threshold | -40 | | | mV | In case of High-Speed deskew calibration (>1.5Gbps) |
+| VIHHS | Single ended input high voltage | | | 460 | mV | Excluding possible additional RF interference of 100mV peak sine wave beyond 450MHz |
+| VILHS | Single ended input low voltage | -40 | | | mV | Excluding possible additional RF interference of 100mV peak sine wave beyond 450MHz |
+| VCMRXDC | Input common mode voltage | 70 | | 330 | mV | Excluding possible additional RF interference of 100mV peak sine wave beyond 450MHz. This table value includes a ground difference of 50mV between the transmitter and the receiver, the static common-mode level tolerance and variations below 450MHz |
+| ZID | Differential input impedance | 80 | 100 | 125 | Ω | |
+
+Table 3-3-19 LP Line Drivers DC Specifications
+
+| Symbol | Parameter | Minimum | Typical | Maximum | Unit |
+| ------------ | ------------------------------------------------------------- | ------- | ------- | ------- | ---- |
+| VOL | Output low-level SE voltage | -50 | | 50 | mV |
+| VOH | Output high-level SE voltage | 1.1 | 1.2 | 1.3 | V |
+| ZOLP | Single-ended output impedance | 110 | | | Ω |
+| ∆ZOLP(01,10) | Single-ended output impedance mismatch driving opposite level | | | 20 | % |
+| ∆ZOLP(00,11) | Single-ended output impedance mismatch driving same level | | | 5 | % |
+
+Table 3-3-20 LP Line Receiver DC Specifications
+
+| Symbol | Parameter | Minimum | Typical | Maximum | Unit |
+| -------- | --------------------------- | ------- | ------- | ------- | ---- |
+| VIL | Input low voltage | | | 550 | mV |
+| VIH | Input high voltage | 740 | | | mV |
+| VIL-ULPS | Logic 0 input voltage, ULPS | | | 300 | mV |
+| VHYST | Input hysteresis | 25 | | | mV |
+
+Table 3-3-21 Contention Line Receiver DC Specifications
+
+| Symbol | Parameter | Minimum | Typical | Maximum | Unit |
+| ------ | -------------------------- | ------- | ------- | ------- | ---- |
+| VILF | Input low fault threshold | | | 200 | mV |
+| VIHF | Input high fault threshold | 450 | | | mV |
+
+### 3.3.6 Electrical Characteristics for USB
+
+Table 3-3-22 Electrical Characteristics for USB
+
+| Parameter | Symbol | Test Condition | Min | Max | Unit |
+| ---------------------------------------------------------------------------- | ------- | ----------------------------------------------------- | --------- | ----- | ---- |
+| High-power Port | VBUS | | 4.75 | 5.25 | V |
+| Low-power Port | VBUS | | 4.4 | 5.25 | V |
+| High-power Hub Port (out) | ICCPRT | | 500 | | mA |
+| Low-power Hub Port (out) | ICCUPT | | 100 | | mA |
+| High-power Function (in) | ICCHPF | | | 500 | mA |
+| Low-power Function (in) | ICCLPF | | | 100 | mA |
+| Unconfigured Function/Hub (in) | ICCINIT | | | 100 | mA |
+| Suspended High-power Device | ICCSH | | | 2.5 | mA |
+| Suspended Low-power Device | ICCSL | | | 500 | uA |
+| High (driven) | VIH | | 2 | | V |
+| High (floating) | VIHZ | | 2.7 | 3.6 | V |
+| Low | VIL | | 0.8 | | V |
+| Differential Input Sensitivity | VDI | | (D+)-(D-) | | 0.2 |
+| Differential Common Mode Range | VCM | Includes VDI range; | 0.8 | 2.5 | V |
+| High-speed squelch detection threshold (differential signal amplitude) | VHSSQ | specification refers to differential signal amplitude | 100 | 150 | mV |
+| High speed disconnect detection threshold (differential signal amplitude) | VHSDSC | specification refers to differential signal amplitude | 525 | 625 | mV |
+| High-speed differential input signaling levels | | Specified by eye pattern templates | | | |
+| High-speed data signaling common mode voltage range (guideline for receiver) | VHSCM | | -50 | 500 | mV |
+| Low | VOL | | 0 | 0.3 | V |
+| High (Driven) | VOH | | 2.8 | 3.6 | V |
+| SE1 | VOSE1 | | 0.8 | | V |
+| Output Signal Crossover Voltage | VCRS | | 1.3 | 2 | V |
+| High-speed idle level | VHSOI | | -10 | 10 | mV |
+| High-speed data signaling high | VHSOH | | 360 | 440 | mV |
+| High-speed data signaling low | VHSOL | | -10 | 10 | mV |
+| Chirp J level (differential voltage) | VCHIRPJ | | 700 | 1100 | mV |
+| Chirp K level (differential voltage) | VCHIRPK | | -900 | -500 | mV |
+| Downstream Facing Port Bypass Capacitance (per hub) | CHPB | VBUS to GND, | 120 | | uF |
+| Upstream Facing Port Bypass Capacitance | CRPB | VBUS to GND | 1 | 10 | uF |
+| Downstream Facing Port | CIND | | 150 | | pF |
+| Upstream Facing Port (w/o cable) | CINUB | | 100 | | pF |
+| Transceiver edge rate control capacitance | CEDGE | | 75 | | pF |
+| TDR spec for high-speed termination | | | | | |
+| Bus Pull-up Resistor on Upstream Facing Port | RPU | 1.5 kΩ ±5% | 1.425 | 1.575 | kΩ |
+| Bus Pull-down Resistor on Downstream Facing Port | RPD | 15 kΩ±5% | 14.25 | 15.75 | kΩ |
+| Input impedance exclusive of pullup/pulldown (for low-/full speed) | ZINP | | 300 | | kΩ |
+| Termination voltage for upstream facing port pullup (RPU) | VTERM | | 3 | 3.6 | V |
+| Termination voltage in high speed | VHSTERM | | -10 | 10 | mV |
+
+#### 3.3.7 Electrical Characteristics for SD/eMMC
+
+Table 3-3-23 SD/eMMC electrical specifications
+
+| Parameter | Test conditions | Min | Max | Units |
+| ---------------------------- | --------------- | ------------ | ------------- | ----- |
+| MMC0_* signals | Relative to VSS | -0.3 | 3.63 | V |
+| Input High Voltage(ViH) | Relative to VSS | 1.68 | - | V |
+| Input Low Voltage(ViL) | Relative to VSS | - | 0.9 | V |
+| VOH | Relative to VSS | 0.75*VDDIO33 | - | V |
+| VOL | Relative to VSS | - | 0.125*VDDIO33 | V |
+| Operating temprature rang TJ | - | -40 | 125 | C |
diff --git "a/zh/00_hardware/K230_\347\241\254\344\273\266\350\256\276\350\256\241\346\214\207\345\215\227.md" "b/zh/00_hardware/K230_\347\241\254\344\273\266\350\256\276\350\256\241\346\214\207\345\215\227.md"
new file mode 100755
index 0000000..90ac806
--- /dev/null
+++ "b/zh/00_hardware/K230_\347\241\254\344\273\266\350\256\276\350\256\241\346\214\207\345\215\227.md"
@@ -0,0 +1,885 @@
+# K230 硬件设计指南
+
+
+
+版权所有©2023北京嘉楠捷思信息技术有限公司
+
+
+
+## 免责声明
+
+您购买的产品、服务或特性等应受北京嘉楠捷思信息技术有限公司(“本公司”,下同)及其关联公司的商业合同和条款的约束,本文档中描述的全部或部分产品、服务或特性可能不在您的购买或使用范围之内。除非合同另有约定,本公司不对本文档的任何陈述、信息、内容的正确性、可靠性、完整性、适销性、符合特定目的和不侵权提供任何明示或默示的声明或保证。除非另有约定,本文档仅作为使用指导参考。
+
+由于产品版本升级或其他原因,本文档内容将可能在未经任何通知的情况下,不定期进行更新或修改。
+
+## 商标声明
+
+、“嘉楠”和其他嘉楠商标均为北京嘉楠捷思信息技术有限公司及其关联公司的商标。本文档可能提及的其他所有商标或注册商标,由各自的所有人拥有。
+
+**版权所有 © 2023北京嘉楠捷思信息技术有限公司。保留一切权利。**
+非经本公司书面许可,任何单位和个人不得擅自摘抄、复制本文档内容的部分或全部,并不得以任何形式传播。
+
+
+
+## 目录
+
+[toc]
+
+## 前言
+
+### 概述
+
+本文档主要介绍K230处理器硬件设计的要点及注意事项,旨在帮助客户缩短产品的设计周期、提高产品的设计稳定性及降低故障率。请客户参考本指南的要求进行硬件设计,同时尽量使用K230发布的相关核心模板。如因特殊原因需要更改的,请严格按照高速数字电路设计要求进行。
+
+### 读者对象
+
+本文档(本指南)主要适用于以下人员:
+
+- 硬件开发工程师
+- 技术支持工程师
+- 测试工程师
+
+### 术语表
+
+| 简称 | 说明 |
+| ----- | ---------------------------------------- |
+| DDR | Double Data Rate |
+| SDRAM | Synchronous Dynamic Random Access Memory |
+| LPDDR | low power double data rate |
+| MIPI | Mobile Industry Processor Interface |
+| OTG | On the Go |
+| APB | Advanced Peripheral Bus |
+| SPI | Serial Peripheral Interface |
+| DMA | Direct Memory Access |
+| AHB | Advanced High Performance Bus |
+| PCM | Pulse Code Modulation |
+| PDM | Pulse Density Modulation |
+| PCLK | Peripheral High-speed Clock |
+| CLK | Clock |
+| DQS | Bi-directional Data Strobe |
+| GPIO | General-purpose Input/Output |
+| eMMC | Embedded Multi-media Card |
+| SIP | System In a Package |
+| PMU | Power Management Unit |
+
+### 修订记录
+
+| 文档版本号 | 修改说明 | 修改者 | 日期 |
+| ---------- | -------- | ------ | ---------- |
+| V1.0 | 初版 | 赵瑞昕 | 2023-06-14 |
+
+## 1. 芯片概述
+
+### 1.1 芯片框图
+
+
+图1-1 K230框图
+
+### 1.2 应用框图
+
+图1-2为K230门锁应用框图
+
+图1-2 K230门锁方案应用框图
+图1-3为词典笔方案应用框图
+
+图1-3 K230词典笔方案应用框图
+
+## 2. 封装与管脚
+
+### 2.1 封装
+
+#### 2.1.1 信息
+
+K230的封装信息如下表2-1所示:
+
+| 器件 | 封装 | 大小 | Pitch |
+| ----- | -------- | ----------- | ----- |
+| K230 | VFBGA390 | 13mm x 13mm | 0.65 |
+| K230D | LFBGA256 | 11mm x 11mm | 0.65 |
+
+#### 2.1.2 封装尺寸
+
+##### K230尺寸
+
+
+图2-1
+
+图2-2
+
+图2-3
+
+球形防焊开口:0.270mm
+
+主要基准C和底面是锡球
+
+尺寸b是测量最大锡球直径,平行于主要基准C
+
+##### K230D尺寸
+
+
+图2-4
+
+图2-5
+
+球形防焊开口:0.270mm
+
+主要基准C和底面是锡球
+
+尺寸b是测量最大锡球直径,平行于主要基准C
+
+#### 2.1.3 引脚定义图
+
+K230引脚分布图如下:
+
+图2-6 K230封装管脚分布
+
+图2-7 K230D封装管脚分布
+引脚详情见表“K230_PINOUT_V1.0_20230524.xlsx”[K230_PINOUT_V1.0_20230524.xlsx](/K230_PINOUT_V1.0_20230524.xlsx)。
+
+## 3. 原理图设计建议
+
+### 3.1. 最小系统设计
+
+#### 3.1.1 时钟要求
+
+K230的主系统需要24MHz的高速时钟,PMU子系统的RTC需要32.768kHz的低速时钟。
+
+表3-1是K230允许的时钟源参数。
+
+| 频点 | 精度 | 电平 |
+| --------- | ----- | ---- |
+| 32.768KHz | 20ppm | 1.8V |
+| 24MHz | 20ppm | 1.8V |
+
+建议使用20ppm或精度更高的时钟源提供时钟。
+
+##### 高速电路
+
+推荐的无源晶体连接方式如图3-1所示。
+
+图3-1 K230晶体电路
+注意:
+
+- 选用的电容需要与晶振的负载电容匹配,材质建议采用NPO 。
+- 建议选用 4Pin 贴片晶振,2个GND管脚与地充分连接,增强系统时钟抗 ESD 干扰能力。
+- 如若需要提高起振速度,可在IN管脚和OUT管脚间添加1MΩ电阻。
+
+推荐的有源晶振连接方式如图3-2所示。
+
+图3-2 K230有源晶振电路
+工作时,晶振输出接到K230的CLK24M_XIN 脚,CLK24M_XOUT脚悬空。
+
+##### 低速时钟
+
+K230芯片内置了PMU电路,单板需要给PMU电路提供时钟。推荐的电路如图3-3所示。
+
+图3-3 K230 RTC时钟无源晶体电路
+推荐的有源晶振连接方式如图3-4所示。
+
+图3-4 K230 RTC时钟有源晶振电路
+
+工作时,晶振输出接到K230的CLK32K768_XIN脚,CLK32K768_XOUT脚悬空。
+注意:
+
+- 在使用有源晶振时,以上各有源晶振电路图中NC处需用0Ω电阻连接。
+
+#### 3.1.2 复位电路
+
+K230的硬件复位通过引脚RSTN来实现,低电平有效。
+如果使用按键复位,建议复位信号引脚增加100nF电容,用来消除复位信号的抖动,增强抗干扰能力,防止误触发导致的系统异常复位。
+复位电路示意图如图3-5。
+
+图3-5 K230 复位电路
+
+#### 3.1.3 系统启动引导顺序
+
+K230芯片提供4种启动方式,可以通过BOOT0和BOOT1引脚来进行相关的配置。
+表3-2为不同配置下K230的启动方式。
+
+| BOOT0 | BOOT1 | K230 | K230D |
+| ----- | ----- | ---------- | ---------- |
+| 0 | 0 | NOR FLASH | NOR FLASH |
+| 1 | 0 | NAND FLASH | NAND FLASH |
+| 0 | 1 | MMC0 | MMC1 |
+| 1 | 1 | MMC1 | MMC0 |
+
+表3-2 启动方式说明
+
+注意:
+
+- 四种启动方式都失效时,会跳转到USB UART启动。
+
+图3-6为推荐的BOOT电路
+
+图3-6 K230 BOOT电路
+
+#### 3.1.4 JTAG Debug电路
+
+K230芯片推荐的JTAG接口电路如图3-7。
+
+[图3-7 K230 JTAG下载电路
+其中,JTAG_TCK、JTAG_TDI、JTAG_TMS和JTAG_RST建议用10kΩ上拉,JTAG_TDO悬空。
+K230必须采用平头哥半导体有限公司提供的CKLink系列调试器,否则芯片无法进行调试。
+
+#### 3.1.5 DDR控制器
+
+K230芯片有K230和K230D两个版本,K230版本需单独设计DDR电路。K230D版本将DDR Die一并进行了封装,无需设计外部DDR电路。
+K230 DDR控制器有以下特点:
+
+- 支持LPDDR3/LPDDR4
+- 支持2 rank
+- 支持16位、32位DDR数据总线位宽
+- 已验证型号:| 协议 | 型号 | 生产厂商 | 容量 |
+ | ------ | ---------------- | -------- | ---- |
+ | LPDDR3 | NT6CL128M32DM-H0 | 南亚 | 4Gb |
+ | LPDDR4 | W66AP6NBUAF/G/HI | 华邦 | 4Gb |
+
+K230 DDR PHY和各个DRAM颗粒的原理图必须和参考原理图一致,包括电源去耦电容。
+
+##### LPDDR3
+
+LPDDR3的电路设计参考图3-8、图3-9、图3-10和图3-11。
+
+图3-8 K230 LPDDR3电路
+
+图3-9 K230 LPDDR3电源电路
+
+图3-10 LPDDR3颗粒电源电路
+
+图3-11 LPDDR3颗粒电路
+
+在使用LPDDR3时:
+
+- DDR PHY和各DRAM颗粒原理图需要和参考设计图一致,包含电源去耦电容
+- DDR_ZN管脚需要接240Ω(1%)的校准电阻到地
+- DDR_RESET管脚悬空
+- 芯片已内置DDR控制器的VREF电路,故DDR_VREF管脚需悬空
+- LP3颗粒的LP3_VREFDQ电压为0.8V,建议使用100Ω和200Ω (1%)的电阻进行分压得出
+- LP3_VREFCA电压为0.6V,建议使用1kΩ(1%)的电阻分压得出
+- LP3的CA、CS、CKE、CLK和ODT引脚均需使用100Ω电阻上下拉到DDR_VDDQ_1V2和地
+
+##### LPDDR4
+
+LPDDR4的电路设计参考图3-12、图3-13、图3-14、图3-15和图3-16。
+
+图3-12 K230 LPDDR4电路
+
+K230 LPDDR4电源电路
+
+图3-14 K230 LPDDR4参考电压电路 LPDDR4颗粒电路](images/HDG/image026.png)
+
+图3-16 LPDDR4颗粒电源电路
+
+在使用LPDDR4时,注意:
+
+- DDR PHY和各DRAM颗粒原理图需要和参考设计图一致,包含电源去耦电容
+- DDR_ZN管脚需要接240Ω(1%)的校准电阻到地
+- RESRT_N管脚直连到颗粒对应管脚
+- K230使用LPDDR4颗粒时,VREF电压为0.6V,建议使用1kΩ(1%)电阻分压
+
+##### K230D DDR模块
+
+K230D已内置DDR Die,因此连接参考电压和校准电阻即可。
+参考电路如图3-17和图3-18
+
+
+图3-17 K230D DDR外围电路
+
+图3-18 K230D DDR参考电压
+
+在使用K230D的DDR模块时,注意:
+
+- VREF电压为0.55V,建议使用100Ω(1%)电阻分压
+- 校准电阻选用240Ω(1%)
+
+#### 3.1.6 FLASH
+
+K230带有OSPI/QSPI控制器,可用来连接FLASH存储芯片,其有以下特点:
+
+- OSPI支持4/8bit模式的 SPI NOR FLASH
+- OSPI最高支持DDR200,SDR166的NOR FLASH
+- QSPI支持1/2/4 bit模式的SPI NAND&NOR FLASH
+- 最高支持SDR100的NOR FLASH
+
+##### OSPI
+
+OSPI参考原理图如图3-19和图3-20
+
+图3-19 K230 OSPI电路
+
+图3-20 OSPI FLASH电路
+
+请根据FLASH芯片的要求放置上拉电阻。
+
+##### QSPI NOR
+
+QSPI信号中,CS、CLK、D0、D1、D2和D3信号的管脚与OSPI对应信号的管脚复用,如表3-3
+
+| QSPI管脚 | OSPI管脚 |
+| -------- | -------- |
+| QSPI_CS | OSPI_CS |
+| QSPI_CLK | OSPI_CLK |
+| QSPI_D0 | OSPI_D0 |
+| QSPI_D1 | OSPI_D1 |
+| QSPI_D2 | OSPI_D2 |
+| QSPI_D3 | OSPI_D3 |
+
+表3-3 QSPI与OSPI对应管脚
+
+参考电路如图3-21
+
+图3-21 QSPI NOR FLASH芯片电路
+请根据FLASH芯片的要求放置上拉电阻。
+
+##### QSPI NAND
+
+QSPI NAND的参考电路如图3-22。
+
+图3-22 QSPI NAND FLASH芯片电路
+请根据FLASH芯片的要求放置上拉电阻。
+
+### 3.2. MMC电路
+
+K230 eMMC 控制电路拥有两个控制器MMC0和MMC1。
+
+#### MMC0
+
+MMC0控制器有以下特点:
+
+- 支持SDIO3.0,工作于4/1-bits mode,最高支持SDR104
+- 支持eMMC5.0工作于8/4/1-bits mode,支持HS200
+- 支持SD卡所需3.3V和1.8V电压的转换
+
+MMC0功能较全,一般用于控制eMMC电路。
+eMMC推荐参考电路如图3-23和图3-24。
+
+
+图3-23 K230 eMMC电路
+
+图3-24 eMMC颗粒电路
+
+请按照eMMC厂家要求连接对应管脚。如无特殊要求,直连对应管脚即可。
+
+#### MMC1
+
+MMC1控制器有以下特点:
+
+- 支持SDIO3.0,工作于4/1-bits mode,最高支持SDR104
+- 支持SD卡所需3.3V和1.8V电压的转换
+
+MMC1性能和管脚数量无法满足控制eMMC电路的要求,只能用于控制SD/TF卡电路。
+参考原理图如图3-25、图3-26和图3-27。
+
+
+图3-25 K230 SD卡接口电路
+
+图3-26 SD卡上拉电路
+
+图3-27 SD卡卡座电路
+
+SD卡电路设计时需注意:
+
+- SD卡引脚的电压去耦电容不得删减,要靠近卡座放置
+- 各信号在SD卡座附近均需放置ESD器件
+- 各信号均需上拉电阻
+- 推荐根据参考电路进行设计
+
+### 3.3. USB电路
+
+K230芯片内置两个USB2.0 OTG控制器,控制器有以下特点:
+
+- 支持USB2.0协议,向下兼容USB 1.1 协议
+- 支持Host模式或者Device模式,可选支持动态切换
+- Host模式支持480Mbps,12Mbps,1.5Mbps 传输速率
+- Device模式支持480Mbps,12Mbps传输模式
+
+USB电路参考原理图如图3-28和图3-29.
+
+
+图3-28 K230 USB电路
+
+图3-29 USB接口电路
+
+注意:
+
+- 各信号在USB座附近均需放置ESD器件
+- K230的USB_VBUS电源,必须串联30kΩ(1%)电阻到5V电源,不能直接连接电源
+- 为保证信号质量,K230的USB_TXRTUNE管脚必须接200Ω(1%)电阻到地
+- USB_ID可用于OTG设备的身份识别,其接地时,K230作为HOST端,其浮空或拉高时,K230作SLAVE端
+
+### 3.4. 音频相关电路
+
+#### 3.4.1 I2S
+
+K230芯片有一个I2S控制器,其有以下特点:
+
+- 拥有两路输入和输出
+- 支持PHILIP I2S标准
+- 支持左右、PCM格式
+- 同步工作模式
+- 主或从模式可选
+- 可调接口电压
+- 采样速率8k到384kHz
+
+K230的I2S拥有3个引脚分别是I2S_CLK、I2S_WS和I2S_SD。
+I2S_CK是串行时钟信号,I2S_WS是数据帧控制信号, I2S_SD是串行数据信号。
+I2S接口通常用于连接解码器等音频外设。
+图3-30和图3-31为K230 I2S接口电路和部分外设电路。
+
+图3-30 K230 I2S接口电路
+
+图3-31 K230 I2S参考外设
+
+#### 3.4.2 PDM
+
+K230支持4路PDM信号输入。采样速率从8k到384kHz。
+PDM接口通常用于接入数字麦克风等具有PDM接口的音频设备。
+图3-32为K230的PDM外设电路。
+
+图3-32 K230 PDM外设电路
+
+#### 3.4.3 模拟音频接口
+
+K230芯片的模拟音频部分有以下特点:
+
+- 支持2路DAC和2路ADC
+- DAC支持差分输出和单端输出,ADC支持差分输入和单端输入
+- 支持低噪声模拟麦克风偏置输出
+
+模拟音频的参考电路如图3-33和图3-34
+
+图3-33 K230 模拟音频接口电路
+
+图3-34 音频接口电路
+
+注意,为获得更好的音质,建议考虑使用以下措施:
+
+- 电源引脚同时使用大容量和小容量的低ESR陶瓷电容
+- MICBIAS管脚需要放置大容量低ESR电容
+- 音频输入的隔直电容靠近K230芯片放置
+- 输出管脚需要放置滤波电路或隔直电容
+
+### 3.5. 视频电路
+
+#### 3.5.1 MIPI DSI
+
+K230的MIPI DSI控制器有以下特点:
+
+- 支持1路信号输出
+- 支持1/2/4lane 模式
+- 最高速率可达1.5Gbps
+
+MIPI DSI各信号均直连。
+参考硬件设计如图3-35和图3-36
+
+
+
+图3-35 K230 MIPI DSI接口电路
+
+图3-36 屏幕接口电路
+注意:
+
+- MIPI_ATB引脚必须浮空
+- MIPI_REXT引脚必须接200Ω(1%)电阻到地
+- 该连接器电路各引脚仅适配今朝辉屏幕,请根据自有屏幕模组设计电路
+
+### 3.6. 摄像头电路
+
+#### 3.6.1 MIPI CSI
+
+K230的MIPI CSI控制器有以下特点:
+
+- 最高支持3路MIPI信号输入,支持1/2/4lane 模式
+- 最高可配置为3路2lane信号输入或1路4lane、1路2lane信号输入
+- 最高速率可达1.5Gbps
+
+MIPI CSI信号推荐直连。
+参考硬件设计如图3-37和图3-38
+
+图3-37 K230 MIPI CSI接口电路
+
+图3-38 摄像头连接器电路
+注意:
+
+- 该连接器电路仅供内部测试使用,实际使用请根据需要自行设计电路
+
+### 3.7. 低速子系统电路
+
+#### 3.7.1 I2C电路
+
+K230芯片支持5路I2C接口,具有以下功能:
+
+- 支持I2C总线主模式
+- 支持7/10 bit地址
+- 支持I2C速率最高到3.4Mbit/s
+
+在使用I2C外设时,需要注意对应电源域供电,必须保持一致。
+I2C信号的SCL和SDA需要外接上拉电阻,根据总线负载和总线速率的不同,选择不同阻值的电阻。
+
+- 在不大于400kb/s的系统中,推荐阻值为4.7kΩ;
+- 在大于400kb/s小于3.4Mb/s的系统中,推荐上拉电阻为2.2 kΩ。
+
+#### 3.7.2 UART电路
+
+K230支持5路UART信号,其具有以下特点:
+
+- 支持2线UART和4线UART
+- 支持RS485接口
+- 支持波特率最高可达3.125M
+- 支持软硬件流控,符合16750标准
+- 支持IrDA 1.0 SIR接收
+
+在使用UART外设时,需要注意对应电源域供电,必须保持一致。
+
+#### 3.7.3 PWM电路
+
+K230支持6路PWM信号,其有以下特点:
+
+- 支持任意占空比
+- 支持输出波形可编程
+- 支持产生周期性的脉冲信号和一次性的脉冲信号
+- 可作为周期精确的中断发生器
+- 支持输出毛刺消除
+
+#### 3.7.4 MCLK电路
+
+K230支持输出3路MCLK信号。该信号可作为摄像头的驱动时钟。
+支持输出时钟频率如表3-4:
+
+| | | | | | | | |
+| :----: | :----: | :---: | :---: | :---: | :---: | :---: | :---: |
+| 792 | 132 | 66.67 | 46.59 | 36 | 28.57 | 23.76 | 18.56 |
+| 594 | 118.8 | 66 | 45.69 | 34.94 | 28.29 | 23.53 | 18.18 |
+| 400 | 113.14 | 66 | 44.44 | 34.43 | 28.29 | 22.85 | 17.39 |
+| 396 | 100 | 60.92 | 44 | 33.33 | 27.31 | 22.22 | 16.67 |
+| 297 | 99 | 59.4 | 42.43 | 33 | 27 | 22 | 16 |
+| 264 | 99 | 57.14 | 41.68 | 33 | 26.67 | 21.21 | 15.38 |
+| 200 | 88 | 56.57 | 40 | 31.68 | 26.4 | 21.05 | 14.81 |
+| 198 | 84.86 | 54 | 39.6 | 31.26 | 25.83 | 20.48 | 14.29 |
+| 198 | 80 | 52.8 | 39.6 | 30.77 | 25.55 | 20 | 13.79 |
+| 158.4 | 79.2 | 50 | 37.71 | 30.46 | 25 | 19.8 | 13.33 |
+| 148.5 | 74.25 | 49.5 | 37.13 | 29.7 | 24.75 | 19.16 | 12.9 |
+| 133.33 | 72 | 49.5 | 36.36 | 29.33 | 24.75 | 19.05 | 12.5 |
+
+表3-4 MCLK输出时钟频率(单位:MHz)
+
+#### 3.7.5 ADC电路
+
+K230集成了一个分辨率为11bit(有效分辨率)的SARADC,最高采样率不小于1MHz。
+其有以下特点:
+
+- 信号输入范围:0-1.8V
+- 支持6个通道输入
+- 支持单次采样和连续采样
+- 内部集成信号调理电路,截止频率在1/2带宽处。ADC可直接进行信号采样,或按需进行外围电路设计
+
+#### 3.7.6 PMU电路
+
+K230的PMU模块用于控制管理芯片内部和外部电源。
+其内置RTC电路,支持6路输入。其功能如表:
+
+| 中断源 | 沿触发 | 电平触发 | 去抖动 | 边沿数量检测 | 长短按检测 |
+| :----: | :----: | :------: | :----: | :----------: | :--------: |
+| INT_0 | 支持 | 支持 | 支持 | - | 支持 |
+| INT_1 | 支持 | 支持 | 支持 | 支持 | - |
+| INT_2 | 支持 | 支持 | - | - | - |
+| INT_3 | 支持 | 支持 | - | - | - |
+| INT_4 | - | 支持 | - | - | - |
+| INT_5 | - | 支持 | - | - | - |
+
+支持两路输出OUT0和OUT1,可用于使能电源。
+在冷启动状态,PMU仅使能了INT0的长按中断和INT4的高电平输入中断,作为PMU模块启动的触发源。OUT0和OUT1默认输出低电平,初始下拉电阻约为40Ω。
+在收到以上两种中断之一时,OUT0拉高,OUT1约50ms后拉高。
+OUT0和OUT1可用于控制外部PMIC的使能管脚或用于其他用途。
+
+### 3.8. 电源设计
+
+#### 3.8.1 K230电源需求
+
+| 模块 | 电源管脚 | 描述 |
+| ------------- | --------------- | ------------------------------------------------------- |
+| CORE | VDD0P8_CORE | CPU0和其他单元电源 |
+| CPU | VDD0P8_CPU | CPU1电源 |
+| KPU | VDD0P8_KPU | KPU电源 |
+| DDR控制器 | VDD0P8_DDR_CORE | DDR的数字CORE电源,可掉电 |
+| | VDD1P1_DDR_IO | DDR的IO电源 |
+| | VAA_DDR | DDR锁相环电源 |
+| USB | AVDD3P3_USB | USB PHY使用的3.3V电源,不使用时可不上电 |
+| | AVDD1P8_USB | USB PHY使用的1.8V电源,不使用时可不上电 |
+| PLL | AVDD0P8_PLL | PLL电源 |
+| MIPI | AVDD0P8_MIPI | MIPI 0.8V电源,不使用时可不上电 |
+| | AVDD1P8_MIPI | MIPI 1.8V电源,不使用时可不上电 |
+| VDD1P8 | VDD1P8 | 1.8V模块电源 |
+| ADC | AVDD1P8_ADC | ADC电源,不使用时可不上电 |
+| CODEC | AVDD1P8_CODEC | CODEC电源,不使用时可不上电 |
+| PMU | AVDD1P8_RTC | PMU内置RTC电源,不使用时可不上电 |
+| | AVDD1P8_LDO | PMU内置LDO电源,不使用时可不上电 |
+| MMC | VDD3P3_SD | 3.3V输出buffer和pre-buffer I/O电源,不使用时可不上电 |
+| IO | VDDIO3P3_0 | IO_2-IO_13电源,电压可选择1.8V或3.3V,不使用时可不上电 |
+| | VDDIO3P3_1 | IO_14-IO_25电源,电压可选择1.8V或3.3V,不使用时可不上电 |
+| | VDDIO3P3_2 | IO_26-IO_37电源,电压可选择1.8V或3.3V,不使用时可不上电 |
+| | VDDIO3P3_3 | IO_38-IO_49电源,电压可选择1.8V或3.3V,不使用时可不上电 |
+| | VDDIO3P3_4 | IO_50-IO_61电源,电压可选择1.8V或3.3V,不使用时可不上电 |
+| | VDDIO3P3_5 | IO_62-IO_63电源,电压可选择1.8V或3.3V,不使用时可不上电 |
+| K230D DDR部分 | VDD1P8_DDR_VDD1 | K230D中DDR颗粒电源,K230没有此管脚 |
+| | VDD1P1_DDR_VDD2 | K230D中DDR颗粒电源,K230没有此管脚,不可掉电 |
+| | VDD1P1_DDR_VDDQ | K230D中DDR颗粒电源,K230没有此管脚,可掉电 |
+
+表3-6 K230电源需求表
+
+#### 3.8.2 上电时序
+
+VDD0P8_CORE上电必须早于VDD1P8、VDDIO3P3_0到VDDIO3P3_5的IO接口上电,AVDD0P8_MIPI上电必须早于AVDD1P8_MIPI,AVDD1P8_RTC不晚于AVDD1P8_LDO,其余顺序无要求。
+
+#### 3.8.3 电源设计建议
+
+##### PMU
+
+| 模块名称 | 管脚 | 最小电压(V) | 典型电压 (V) | 最大电压(V) | 电流 (mA) | 注意事项 |
+| -------- | ----------- | ----------- | ------------ | ----------- | --------- | --------------- |
+| PMU | AVDD1P8_RTC | 1.674 | 1.8 | 1.98 | 10 | 建议使用LDO供电 |
+| | AVDD1P8_LDO | 1.674 | 1.8 | 1.98 | 10 | 建议使用LDO供电 |
+
+##### 核心模块
+
+| 模块名称 | 管脚 | 最小电压(V) | 典型电压 (V) | 最大电压(V) | 电流 (mA) | 注意事项 |
+| -------- | ----------- | ----------- | ------------ | ----------- | --------- | --------------------------------------------- |
+| CORE | VDD0P8_CORE | 0.72 | 0.8 | 0.88 | 2250 | 建议使用供电能力不小于3A,纹波噪声较低的DC/DC |
+| CPU | VDD0P8_CPU | 0.72 | 0.8 | 0.88 | 1000 | 建议使用供电能力不小于2A,纹波噪声较低的DC/DC |
+| KPU | VDD0P8_KPU | 0.72 | 0.8 | 0.88 | 3000 | 建议使用供电能力不小于4A,纹波噪声较低的DC/DC |
+
+##### DDR
+
+| 模块名称 | 管脚 | 最小电压(V) | 典型电压 (V) | 最大电压(V) | 电流 (mA) | 注意事项 |
+| -------- | --------------------- | ----------- | ------------ | ----------- | --------- | ----------------------------------------------------- |
+| DDR | VDD0P8_DDR_CORE | 0.744 | 0.8 | 0.88 | 400 | 电源纹波要求在4%以内,建议使用可输出大电流的低噪声LDO |
+| | VDD1P1_DDR_IO(LPDDR4) | 1.06 | 1.1 | 1.17 | 800 | LP4纹波要求5%以内,建议使用可输出大电流的低噪声LDO |
+| | VDD1P1_DDR_IO(LPDDR3) | 1.14 | 1.2 | 1.3 | 800 | LP3纹波要求10%以内,建议使用可输出大电流的低噪声LDO |
+| | VAA_DDR | 1.674 | 1.8 | 1.98 | 10 | 纹波要求在典型电压5%以内 |
+
+##### K230D DDR Die
+
+| 模块名称 | 管脚 | 最小电压(V) | 典型电压 (V) | 最大电压(V) | 电流 (mA) | 注意事项 |
+| ------------- | --------------- | ----------- | ------------ | ----------- | --------- | ------------------------------------------------------- |
+| K230D DDR die | VDD1P8_DDR_VDD1 | 1.7 | 1.8 | 1.95 | 75 | 纹波要求在典型电压5%以内,与DDR控制器电源在同一电源网络 |
+| | VDD1P1_DDR_VDD2 | 1.06 | 1.1 | 1.17 | 450 | 与VDD1P1_DDR_IO在同一电源网络 |
+| | VDD1P1_DDR_VDDQ | 1.06 | 1.1 | 1.17 | 300 | 建议使用可输出大电流的低噪声LDO |
+
+##### I/O
+
+| 模块名称 | 管脚 | 最小电压(V) | 典型电压 (V) | 最大电压(V) | 电流 (mA) | 注意事项 |
+| -------- | ---------- | ----------- | ------------ | ----------- | --------- | ------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------ |
+| IO | VDDIO3P3_0 | 1.62/2.97 | 1.8/3.3 | 1.98/3.63 | 50 | IO单元共有5组电压,均可配置为1.8V或3.3V,每组电压控制了该组I/O口的输出电压和输入电压,也控制I/O复用后功能的输出电压和输入电压。IO电压请与所需连接的外设保持一致,如不一致则需进行电平转换。 |
+| | VDDIO3P3_1 | 1.62/2.97 | 1.8/3.3 | 1.98/3.63 | 50 | |
+| | VDDIO3P3_2 | 1.62/2.97 | 1.8/3.3 | 1.98/3.63 | 50 | |
+| | VDDIO3P3_3 | 1.62/2.97 | 1.8/3.3 | 1.98/3.63 | 50 | |
+| | VDDIO3P3_4 | 1.62/2.97 | 1.8/3.3 | 1.98/3.63 | 50 | |
+| | VDDIO3P3_5 | 1.62/2.97 | 1.8/3.3 | 1.98/3.63 | 50 | |
+
+##### USB
+
+| 模块名称 | 管脚 | 最小电压(V) | 典型电压 (V) | 最大电压(V) | 电流 (mA) | 注意事项 |
+| -------- | ----------- | ----------- | ------------ | ----------- | --------- | ------------------- |
+| USB | AVDD3P3_USB | 3.07 | 3.3 | 3.63 | 50 | 建议使用LDO进行供电 |
+| | AVDD1P8_USB | 1.674 | 1.8 | 1.98 | 60 | 建议使用LDO进行供电 |
+
+##### PLL
+
+| 模块名称 | 管脚 | 最小电压(V) | 典型电压 (V) | 最大电压(V) | 电流 (mA) | 注意事项 |
+| -------- | ----------- | ----------- | ------------ | ----------- | --------- | ------------------------- |
+| PLL | AVDD0P8_PLL | 0.72 | 0.8 | 0.88 | 120 | 建议使用高精度LDO进行供电 |
+
+##### MIPI
+
+| 模块名称 | 管脚 | 最小电压(V) | 典型电压 (V) | 最大电压(V) | 电流 (mA) | 注意事项 |
+| -------- | ------------ | ----------- | ------------ | ----------- | --------- | ------------------- |
+| MIPI | AVDD0P8_MIPI | 0.744 | 0.8 | 0.88 | 100 | 建议使用LDO进行供电 |
+| | AVDD1P8_MIPI | 1.674 | 1.8 | 1.98 | 30 | 建议使用LDO进行供电 |
+
+##### ADC
+
+| 模块名称 | 管脚 | 最小电压(V) | 典型电压 (V) | 最大电压(V) | 电流 (mA) | 注意事项 |
+| -------- | ----------- | ----------- | ------------ | ----------- | --------- | ------------------------- |
+| ADC | AVDD1P8_ADC | 1.62 | 1.8 | 1.98 | 10 | 建议使用高精度LDO进行供电 |
+
+##### CODEC
+
+| 模块名称 | 管脚 | 最小电压(V) | 典型电压 (V) | 最大电压(V) | 电流 (mA) | 注意事项 |
+| -------- | ------------- | ----------- | ------------ | ----------- | --------- | ------------------------- |
+| CODEC | AVDD1P8_CODEC | 1.62 | 1.8 | 1.98 | 100 | 建议使用高精度LDO进行供电 |
+
+##### 其他
+
+| 模块名称 | 管脚 | 最小电压(V) | 典型电压 (V) | 最大电压(V) | 电流 (mA) | 注意事项 |
+| -------- | --------- | ----------- | ------------ | ----------- | --------- | -------- |
+| 其他 | VDD3P3_SD | 2.7 | 3.3 | 3.63 | 50 | |
+| | VDD1P8 | 1.62 | 1.8 | 1.98 | 500 | |
+
+注意:
+
+- 对于K230需要使用的DDR颗粒,电源需与主芯片电源在同一电源网络。
+- 在满足电压精度要求和电流要求的情况下,电压要求相同的模块可使用同一电压源。对于精度要求不高的场合,ADC等模拟模块也可在隔离后接入数字模块所使用的的电源。
+- K230内部集成DDR_Vref电源给芯片DDR控制器,对于外部颗粒,LPDDR3的VREF电源参考设计如图3-39
+
+
+图3-39 LPDDR3颗粒Vref电路
+
+分压电阻建议使用精度为±1%的电阻。
+LPDDR4的外部颗粒VREF电源参考设计如图3-40。
+
+
+图3-40 LPDDR4颗粒Vref电路
+
+K230D的DDR模块VREF电源参考设计如图3-41
+
+
+图3-41 K230D版本DDR Vref电路
+
+#### 3.8.4 动态调压
+
+K230的CPU和KPU电源支持动态调压,以确保同时满足高性能和低功耗的需求。
+CPU的可调电压节点如表3-7
+
+| 电压节点 | 电压(V) |
+| ----------- | ------- |
+| V_typical | 0.8 |
+| V_high | 0.9 |
+| V_ultrahigh | 1.0 |
+| V_low | 0.7 |
+| V_retention | 0.48 |
+
+表3-8 CPU可调电压节点
+
+其中,V_retention是针对DDR retention功能的电压节点。
+KPU的可调电压节点如表3-8
+
+| 电压节点 | 电压(V) |
+| ----------- | ------- |
+| V_typical | 0.8 |
+| V_high | 0.9 |
+| V_ultrahigh | 1.0 |
+| V_low | 0.7 |
+
+表3-9 KPU可调电压节点
+
+## 4. PCB设计建议
+
+### 4.1高速PCB设计建议
+
+#### 4.1.1 DDR设计
+
+阻抗控制:DDR单线60Ω,差分(时钟clk,数据dqs)120Ω;
+串扰要求:遵循3W原则
+等长要求:同类型信号线经过过孔数量保持一致;
+芯片内部DDR走线长度如表4-1,在PCB走线时务必考虑,保证内外走线之和满足等长要求。
+PCB设计强烈建议参考K230 EVB的设计,包括走线和电容的选型及摆放。
+
+| 管脚编号 | 管脚名称 | 长度(μm) | 长度(mil) |
+| -------- | ---------------- | --------- | --------- |
+| N17 | DDR_CKE0_CKEA0 | 3725.8 | 146.8 |
+| P18 | DDR_CKE1_CKEA1 | 4338.56 | 170.94 |
+| T20 | DDR_CS0_CSA0 | 5839.03 | 230.06 |
+| T19 | DDR_CS1_CSA1 | 5528.07 | 217.81 |
+| R19 | DDR_CKP_CKAP | 6252.24 | 246.34 |
+| R20 | DDR_CKN_CKAN | 6050.13 | 238.38 |
+| N18 | DDR_NC_NC | 3937.42 | 155.13 |
+| M17 | DDR_NC_NC | 1925.8 | 75.88 |
+| P19 | DDR_CA9_CAA5 | 5809.3 | 228.89 |
+| M18 | DDR_CA8_CAA4 | 4033.87 | 158.93 |
+| N20 | DDR_CA7_CAA3 | 4888.23 | 192.6 |
+| N19 | DDR_CA6_CAA2 | 4415.08 | 173.95 |
+| L16 | DDR_CA5_CAA1 | 2171.4 | 85.55 |
+| M19 | DDR_CA4_CAA0 | 4599.65 | 181.23 |
+| L17 | DDR_CA3_NC | 2258.98 | 89 |
+| M20 | DDR_CA2_NA | 4190.42 | 165.1 |
+| L20 | DDR_CA1_NC | 5108.55 | 201.28 |
+| K20 | DDR_CA0_NC | 4832.33 | 190.39 |
+| L18 | DDR_ODT_NC | 3849.11 | 151.65 |
+| J18 | DDR_NC_CKEB0 | 2599.43 | 102.42 |
+| J17 | DDR_NC_CKEB1 | 2792.84 | 110.04 |
+| J19 | DDR_NC_CSB1 | 4018.49 | 158.33 |
+| J20 | DDR_NC_CSB0 | 4941.35 | 194.69 |
+| G20 | DDR_NC_CKBP | 5403.63 | 212.9 |
+| F20 | DDR_NC_CKBN | 5418.33 | 213.48 |
+| H18 | DDR_NC_NC | 4350.39 | 171.41 |
+| H19 | DDR_NC_NC | 4900.25 | 193.07 |
+| E20 | DDR_NC_CAB0 | 5468.25 | 215.45 |
+| G19 | DDR_NC_CAB1 | 4067.91 | 160.28 |
+| G18 | DDR_NC_CAB2 | 3807.29 | 150.01 |
+| H17 | DDR_NC_CAB3 | 3113.45 | 122.67 |
+| F17 | DDR_NC_CAB4 | 2757.73 | 108.65 |
+| F19 | DDR_NC_CAB5 | 4558.27 | 179.6 |
+| D20 | DDR_NC_NC | 6535.69 | 257.51 |
+| G17 | DDR_NC_NC | 3477.72 | 137.02 |
+| D19 | DDR_NC_NC | 5257.59 | 207.15 |
+| F18 | DDR_NC_NC | 4584.72 | 180.64 |
+| C20 | DDR_NC_NC | 6979.27 | 274.98 |
+| U17 | DDR_DQ29_DQA7 | 4829.45 | 190.28 |
+| Y18 | DDR_DQ28_DQA6 | 6467.43 | 254.82 |
+| V18 | DDR_DQ25_DQA5 | 5047.5 | 198.87 |
+| W18 | DDR_DQ24_DQA4 | 5267.44 | 207.54 |
+| Y16 | DDR_DQ27_DQA3 | 5846.86 | 230.37 |
+| V16 | DDR_DQ26_DQA2 | 4311.64 | 169.88 |
+| T16 | DDR_DQ30_DQA1 | 3576.39 | 140.91 |
+| U16 | DDR_DQ31_DQA0 | 3132.83 | 123.43 |
+| V17 | DDR_DM3_DMIA0 | 4110.44 | 161.95 |
+| W17 | DDR_DQS3P_DQSA0P | 6342.48 | 249.89 |
+| Y17 | DDR_DQS3N_DQSA0N | 6135.17 | 241.73 |
+| R17 | DDR_DQ10_DQA8 | 4018.24 | 158.32 |
+| T18 | DDR_DQ12_DQA9 | 5760.1 | 226.95 |
+| R18 | DDR_DQ8_DQA10 | 4540.62 | 178.9 |
+| U20 | DDR_DQ13_DQA11 | 5625.11 | 221.63 |
+| W19 | DDR_DQ11_DQA12 | 6897.92 | 271.78 |
+| U18 | DDR_DQ14_DQA13 | 4908.14 | 193.38 |
+| P16 | DDR_DQ9_DQA14 | 2036.92 | 80.25 |
+| T17 | DDR_DQ15_DQA15 | 4492.07 | 176.99 |
+| P17 | DDR_DM1_DMIA1 | 4129.14 | 162.69 |
+| V20 | DDR_DQS1P_DQSA1P | 7005.11 | 276 |
+| V19 | DDR_DQS1N_DQSA1N | 6768.98 | 266.7 |
+| C17 | DDR_DQ0_DQB4 | 4038.16 | 159.1 |
+| D16 | DDR_DQ1_DQB1 | 3663.33 | 144.34 |
+| D17 | DDR_DQ2_DQB0 | 4242.29 | 167.15 |
+| C18 | DDR_DQ3_DQB5 | 5598.19 | 220.57 |
+| E18 | DDR_DQ4_DQB2 | 3830.51 | 150.92 |
+| E17 | DDR_DQ5_DQB3 | 4273.06 | 168.36 |
+| B19 | DDR_DQ6_DQB7 | 6879.01 | 271.03 |
+| C19 | DDR_DQ7_DQB6 | 6640.84 | 261.65 |
+| D18 | DDR_DM0_DMIB0 | 5275.38 | 207.85 |
+| B18 | DDR_DQS0P_DQSB0P | 6516.79 | 256.76 |
+| A18 | DDR_DQS0N_DQSB0N | 6628.66 | 261.17 |
+| C14 | DDR_DQ16_DQB11 | 2966.98 | 116.9 |
+| D14 | DDR_DQ20_DQB8 | 2708.03 | 106.7 |
+| B14 | DDR_DQ17_DQB10 | 4486.79 | 176.78 |
+| A14 | DDR_DQ21_DQB9 | 5608.52 | 220.98 |
+| A17 | DDR_DQ19_DQB14 | 5037.71 | 198.49 |
+| B16 | DDR_DQ23_DQB15 | 4419.48 | 174.13 |
+| C16 | DDR_DQ18_DQB13 | 4381.95 | 172.65 |
+| B17 | DDR_DQ22_DQB12 | 5515.88 | 217.33 |
+| C15 | DDR_DM2_DMIB1 | 4509.87 | 177.69 |
+| B15 | DDR_DQS2P_DQSB1P | 4623.9 | 182.18 |
+| A15 | DDR_DQS2N_DQSB1N | 4942.59 | 194.74 |
+
+表4-1 芯片内部DDR走线长度
+
+##### LPDDR3部分
+
+- 数据线内部等长要求:(DQ to DQS domain)DQS_P/N and DQ[7:0] & DM for each byte lane, the length of DQ = DQS +/- 10ps
+- 地址线内部等长要求:(CS, ODT, CKE, Cmd, Add to CK/CK#)
+- When routing CK_P/N and CA signals for the memory interface, the length of the CA = CK +/- 10ps
+- DQS与CK之间的等长要求:(DQS to CK domain)When routing DQS for each byte lane, the length of each DQS pair must be (CK – 85ps) <= DQS <= CK
+
+##### LPDDR4部分
+
+- 数据线内部等长要求:DQS_P/N and DQ[7:0] & DM for each byte lane, the length of DQ = DQS +/- 10ps
+- 地址线内部等长要求:(CS, ODT, CKE, Cmd, Add to CK/CK#)When routing CK_P/N and CA signals for the memory interface, the length of the CA = CK +/- 10ps
+- DQS与CK之间的等长要求:When routing DQS for each byte lane, the length of each DQS pair must be (CK – 60ps) <= DQS <= CK
+
+#### 4.1.2 USB2.0设计
+
+- 阻抗控制:差分90Ω。
+- 差分对内skew不超过4ps,最大允许过孔数量不超过6个。
+
+#### 4.1.3 MIPI设计
+
+- 阻抗控制:MIPI_DSI差分100Ω,MIPI_CSI差分100Ω
+- 线对之内等长控制在0.3mm。
diff --git a/zh/00_hardware/README.md b/zh/00_hardware/README.md
new file mode 100755
index 0000000..f5d89b4
--- /dev/null
+++ b/zh/00_hardware/README.md
@@ -0,0 +1,49 @@
+# K230 SDK Hardware Docs
+
+## K230 硬件相关文档
+
+| 文档名称 | 文档概要 |
+| --- | --- |
+| [K230_DEMO_BOARD资源使用指南.md](K230_DEMO_BOARD资源使用指南.md) | K230 Demo Board 硬件资源使用说明文档 |
+| [K230_硬件设计指南.md](K230_硬件设计指南.md) | K230 硬件设计指南文档 |
+| [K230_PINOUT_V1.0_20230524](K230_PINOUT_V1.0_20230524.xlsx) | K230 芯片引脚定义 |
+| [K230_datasheet.md](K230_datasheet.md) | K230 Datasheet |
+
+## K230 工程设计文件
+
+| 文档名称 | 文档概要 |
+| --- | --- |
+| [K230_DEMO_BOARD-20230427-DXF](K230/K230_DEMO_BOARD-20230427-DXF.zip) | K230 Demo Board DXF 文件|
+| [K230_DEMO_BOARD-20230427-GERBER](K230/K230_DEMO_BOARD-20230427-GERBER.zip) | K230 Demo Board制板用GERBER文件 |
+| [K230_DEMO_BOARD-20230427-PCB](K230/K230_DEMO_BOARD-20230427-PCB.zip) | K230 Demo Board PCB Cadence 设计文件|
+| [K230_DEMO_BOARD-20230427-SMT](K230/K230_DEMO_BOARD-20230427-SMT.zip) | K230 Demo Board SMT 焊接排布与钻孔文件|
+| [K230-DEMO-BOARD-BOM-20230510](K230/K230-DEMO-BOARD-BOM-20230510.xlsx) | K230 Demo Board所用器件BOM |
+| [K230-DEMO-BOARD-SCH.DSN](K230/K230-DEMO-BOARD-SCH.DSN) | K230 Demo Board 原理图Cadence CIS Capture文件 |
+| [K230-DEMO-BOARD-SCH.pdf](K230/K230-DEMO-BOARD-SCH.pdf) | K230 Demo Board 原理图 pdf文件 |
+
+## K230D 工程设计文件
+
+| 文档名称 | 文档概要 |
+| --- | --- |
+| [K230-SIP-EVB-V1_0-A_1-20230322-DXF](K230D/K230-SIP-EVB-V1_0-A_1-20230322-DXF.zip) | K230D Demo Board DXF 文件|
+| [K230-SIP-EVB-V1_0-A_1-20230322-GERBER](K230D/K230-SIP-EVB-V1_0-A_1-20230322-GERBER.zip) | K230D Demo Board制板用GERBER文件 |
+| [K230-SIP-EVB-V1_0-A_1-20230322-PCB](K230D/K230-SIP-EVB-V1_0-A_1-20230322-PCB.zip) | K230D Demo Board PCB Cadence 设计文件|
+| [K230-SIP-EVB-V1_0-A_1-20230322-SMT](K230D/K230-SIP-EVB-V1_0-A_1-20230322-SMT.zip) | K230D Demo Board SMT 焊接排布与钻孔文件|
+| [K230-SIP-EVB-V1_0-A_1_20230316-BOM](K230D/K230-SIP-EVB-V1_0-A_1_20230316-BOM.xlsx) | K230D Demo Board所用器件BOM |
+| [K230-SIP-EVB-V1_0-A_1-20230316.DSN](K230D/K230-SIP-EVB-V1_0-A_1-20230316.DSN) | K230D Demo Board 原理图Cadence CIS Capture文件 |
+| [K230-SIP-EVB-V1.0-A.1-20230317.pdf](K230D/K230-SIP-EVB-V1.0-A.1-20230317.pdf) | K230D Demo Board 原理图 pdf文件 |
+
+## 贡献指南
+
+如果您对本项目感兴趣,想要反馈问题或提交文档,请参考[CONTRIBUTING](/.github/CONTRIBUTING.md)
+
+## 联系我们
+
+北京嘉楠捷思信息技术有限公司
+网址:[canaan-creative.com](https://www.canaan-creative.com/)
+商务垂询:[salesAI@canaan-creative.com](mailto:salesAI@canaan-creative.com)
+
+**翻译免责声明**
+为方便客户,Canaan 使用 AI 翻译程序将文本翻译为多种语言,它可能包含错误。我们不保证提供的译文的准确性、可靠性或时效性。对于因依赖已翻译信息的准确性或可靠性而造成的任何损失或损害,Canaan 概不负责。如果不同语言翻译之间存在内容差异,以简体中文版本为准。
+
+如果您要报告翻译错误或不准确的问题,欢迎通过邮件与我们联系。
diff --git a/zh/00_hardware/images/GPIO_electric.png b/zh/00_hardware/images/GPIO_electric.png
new file mode 100755
index 0000000..d3e42e4
Binary files /dev/null and b/zh/00_hardware/images/GPIO_electric.png differ
diff --git a/zh/00_hardware/images/HDG/canaan-cover.png b/zh/00_hardware/images/HDG/canaan-cover.png
new file mode 100755
index 0000000..0319765
Binary files /dev/null and b/zh/00_hardware/images/HDG/canaan-cover.png differ
diff --git a/zh/00_hardware/images/HDG/figure1_1.jpg b/zh/00_hardware/images/HDG/figure1_1.jpg
new file mode 100755
index 0000000..499ef98
Binary files /dev/null and b/zh/00_hardware/images/HDG/figure1_1.jpg differ
diff --git a/zh/00_hardware/images/HDG/image002.jpg b/zh/00_hardware/images/HDG/image002.jpg
new file mode 100755
index 0000000..3794d35
Binary files /dev/null and b/zh/00_hardware/images/HDG/image002.jpg differ
diff --git a/zh/00_hardware/images/HDG/image003.jpg b/zh/00_hardware/images/HDG/image003.jpg
new file mode 100755
index 0000000..6e39b80
Binary files /dev/null and b/zh/00_hardware/images/HDG/image003.jpg differ
diff --git a/zh/00_hardware/images/HDG/image004.jpg b/zh/00_hardware/images/HDG/image004.jpg
new file mode 100755
index 0000000..c9c546e
Binary files /dev/null and b/zh/00_hardware/images/HDG/image004.jpg differ
diff --git a/zh/00_hardware/images/HDG/image005.png b/zh/00_hardware/images/HDG/image005.png
new file mode 100755
index 0000000..c80dc9d
Binary files /dev/null and b/zh/00_hardware/images/HDG/image005.png differ
diff --git a/zh/00_hardware/images/HDG/image006.png b/zh/00_hardware/images/HDG/image006.png
new file mode 100755
index 0000000..d790532
Binary files /dev/null and b/zh/00_hardware/images/HDG/image006.png differ
diff --git a/zh/00_hardware/images/HDG/image007.png b/zh/00_hardware/images/HDG/image007.png
new file mode 100755
index 0000000..7ab1041
Binary files /dev/null and b/zh/00_hardware/images/HDG/image007.png differ
diff --git a/zh/00_hardware/images/HDG/image008.png b/zh/00_hardware/images/HDG/image008.png
new file mode 100755
index 0000000..8b02e9e
Binary files /dev/null and b/zh/00_hardware/images/HDG/image008.png differ
diff --git a/zh/00_hardware/images/HDG/image009.png b/zh/00_hardware/images/HDG/image009.png
new file mode 100755
index 0000000..626fd13
Binary files /dev/null and b/zh/00_hardware/images/HDG/image009.png differ
diff --git a/zh/00_hardware/images/HDG/image010.png b/zh/00_hardware/images/HDG/image010.png
new file mode 100755
index 0000000..8bfc199
Binary files /dev/null and b/zh/00_hardware/images/HDG/image010.png differ
diff --git a/zh/00_hardware/images/HDG/image011.png b/zh/00_hardware/images/HDG/image011.png
new file mode 100755
index 0000000..6f99f98
Binary files /dev/null and b/zh/00_hardware/images/HDG/image011.png differ
diff --git a/zh/00_hardware/images/HDG/image012.png b/zh/00_hardware/images/HDG/image012.png
new file mode 100755
index 0000000..a45c213
Binary files /dev/null and b/zh/00_hardware/images/HDG/image012.png differ
diff --git a/zh/00_hardware/images/HDG/image013.png b/zh/00_hardware/images/HDG/image013.png
new file mode 100755
index 0000000..3cb9167
Binary files /dev/null and b/zh/00_hardware/images/HDG/image013.png differ
diff --git a/zh/00_hardware/images/HDG/image014.png b/zh/00_hardware/images/HDG/image014.png
new file mode 100755
index 0000000..d68f7f8
Binary files /dev/null and b/zh/00_hardware/images/HDG/image014.png differ
diff --git a/zh/00_hardware/images/HDG/image015.png b/zh/00_hardware/images/HDG/image015.png
new file mode 100755
index 0000000..aa22747
Binary files /dev/null and b/zh/00_hardware/images/HDG/image015.png differ
diff --git a/zh/00_hardware/images/HDG/image016.png b/zh/00_hardware/images/HDG/image016.png
new file mode 100755
index 0000000..988a0db
Binary files /dev/null and b/zh/00_hardware/images/HDG/image016.png differ
diff --git a/zh/00_hardware/images/HDG/image017.png b/zh/00_hardware/images/HDG/image017.png
new file mode 100755
index 0000000..ca28217
Binary files /dev/null and b/zh/00_hardware/images/HDG/image017.png differ
diff --git a/zh/00_hardware/images/HDG/image018.png b/zh/00_hardware/images/HDG/image018.png
new file mode 100755
index 0000000..eacf27d
Binary files /dev/null and b/zh/00_hardware/images/HDG/image018.png differ
diff --git a/zh/00_hardware/images/HDG/image019.png b/zh/00_hardware/images/HDG/image019.png
new file mode 100755
index 0000000..6301e42
Binary files /dev/null and b/zh/00_hardware/images/HDG/image019.png differ
diff --git a/zh/00_hardware/images/HDG/image020.png b/zh/00_hardware/images/HDG/image020.png
new file mode 100755
index 0000000..3b5d232
Binary files /dev/null and b/zh/00_hardware/images/HDG/image020.png differ
diff --git a/zh/00_hardware/images/HDG/image021.png b/zh/00_hardware/images/HDG/image021.png
new file mode 100755
index 0000000..d1e32c7
Binary files /dev/null and b/zh/00_hardware/images/HDG/image021.png differ
diff --git a/zh/00_hardware/images/HDG/image022.png b/zh/00_hardware/images/HDG/image022.png
new file mode 100755
index 0000000..f8f1ea3
Binary files /dev/null and b/zh/00_hardware/images/HDG/image022.png differ
diff --git a/zh/00_hardware/images/HDG/image023.png b/zh/00_hardware/images/HDG/image023.png
new file mode 100755
index 0000000..58dac1d
Binary files /dev/null and b/zh/00_hardware/images/HDG/image023.png differ
diff --git a/zh/00_hardware/images/HDG/image024.png b/zh/00_hardware/images/HDG/image024.png
new file mode 100755
index 0000000..46b15e3
Binary files /dev/null and b/zh/00_hardware/images/HDG/image024.png differ
diff --git a/zh/00_hardware/images/HDG/image025.png b/zh/00_hardware/images/HDG/image025.png
new file mode 100755
index 0000000..0e8116d
Binary files /dev/null and b/zh/00_hardware/images/HDG/image025.png differ
diff --git a/zh/00_hardware/images/HDG/image026.png b/zh/00_hardware/images/HDG/image026.png
new file mode 100755
index 0000000..aa635ac
Binary files /dev/null and b/zh/00_hardware/images/HDG/image026.png differ
diff --git a/zh/00_hardware/images/HDG/image027.png b/zh/00_hardware/images/HDG/image027.png
new file mode 100755
index 0000000..81d0753
Binary files /dev/null and b/zh/00_hardware/images/HDG/image027.png differ
diff --git a/zh/00_hardware/images/HDG/image028.png b/zh/00_hardware/images/HDG/image028.png
new file mode 100755
index 0000000..2a67b55
Binary files /dev/null and b/zh/00_hardware/images/HDG/image028.png differ
diff --git a/zh/00_hardware/images/HDG/image029.png b/zh/00_hardware/images/HDG/image029.png
new file mode 100755
index 0000000..7c79518
Binary files /dev/null and b/zh/00_hardware/images/HDG/image029.png differ
diff --git a/zh/00_hardware/images/HDG/image030.png b/zh/00_hardware/images/HDG/image030.png
new file mode 100755
index 0000000..df99a27
Binary files /dev/null and b/zh/00_hardware/images/HDG/image030.png differ
diff --git a/zh/00_hardware/images/HDG/image031.png b/zh/00_hardware/images/HDG/image031.png
new file mode 100755
index 0000000..6773d26
Binary files /dev/null and b/zh/00_hardware/images/HDG/image031.png differ
diff --git a/zh/00_hardware/images/HDG/image032.png b/zh/00_hardware/images/HDG/image032.png
new file mode 100755
index 0000000..b19560f
Binary files /dev/null and b/zh/00_hardware/images/HDG/image032.png differ
diff --git a/zh/00_hardware/images/HDG/image033.png b/zh/00_hardware/images/HDG/image033.png
new file mode 100755
index 0000000..e3c7247
Binary files /dev/null and b/zh/00_hardware/images/HDG/image033.png differ
diff --git a/zh/00_hardware/images/HDG/image034.png b/zh/00_hardware/images/HDG/image034.png
new file mode 100755
index 0000000..57377d8
Binary files /dev/null and b/zh/00_hardware/images/HDG/image034.png differ
diff --git a/zh/00_hardware/images/HDG/image035.png b/zh/00_hardware/images/HDG/image035.png
new file mode 100755
index 0000000..0c40b7a
Binary files /dev/null and b/zh/00_hardware/images/HDG/image035.png differ
diff --git a/zh/00_hardware/images/HDG/image036.png b/zh/00_hardware/images/HDG/image036.png
new file mode 100755
index 0000000..be6bd39
Binary files /dev/null and b/zh/00_hardware/images/HDG/image036.png differ
diff --git a/zh/00_hardware/images/HDG/image037.png b/zh/00_hardware/images/HDG/image037.png
new file mode 100755
index 0000000..d6bd4e4
Binary files /dev/null and b/zh/00_hardware/images/HDG/image037.png differ
diff --git a/zh/00_hardware/images/HDG/image038.png b/zh/00_hardware/images/HDG/image038.png
new file mode 100755
index 0000000..a9a168a
Binary files /dev/null and b/zh/00_hardware/images/HDG/image038.png differ
diff --git a/zh/00_hardware/images/HDG/image039.png b/zh/00_hardware/images/HDG/image039.png
new file mode 100755
index 0000000..aa47bd3
Binary files /dev/null and b/zh/00_hardware/images/HDG/image039.png differ
diff --git a/zh/00_hardware/images/HDG/image040.png b/zh/00_hardware/images/HDG/image040.png
new file mode 100755
index 0000000..5fbe87e
Binary files /dev/null and b/zh/00_hardware/images/HDG/image040.png differ
diff --git a/zh/00_hardware/images/HDG/image041.png b/zh/00_hardware/images/HDG/image041.png
new file mode 100755
index 0000000..5c0ec8e
Binary files /dev/null and b/zh/00_hardware/images/HDG/image041.png differ
diff --git a/zh/00_hardware/images/HDG/image042.png b/zh/00_hardware/images/HDG/image042.png
new file mode 100755
index 0000000..ce2e86b
Binary files /dev/null and b/zh/00_hardware/images/HDG/image042.png differ
diff --git a/zh/00_hardware/images/HDG/image043.png b/zh/00_hardware/images/HDG/image043.png
new file mode 100755
index 0000000..1f8a366
Binary files /dev/null and b/zh/00_hardware/images/HDG/image043.png differ
diff --git a/zh/00_hardware/images/HDG/image044.png b/zh/00_hardware/images/HDG/image044.png
new file mode 100755
index 0000000..3369b63
Binary files /dev/null and b/zh/00_hardware/images/HDG/image044.png differ
diff --git a/zh/00_hardware/images/HDG/image045.png b/zh/00_hardware/images/HDG/image045.png
new file mode 100755
index 0000000..3efcb27
Binary files /dev/null and b/zh/00_hardware/images/HDG/image045.png differ
diff --git a/zh/00_hardware/images/HDG/image046.png b/zh/00_hardware/images/HDG/image046.png
new file mode 100755
index 0000000..c3d64a5
Binary files /dev/null and b/zh/00_hardware/images/HDG/image046.png differ
diff --git a/zh/00_hardware/images/HDG/image047.png b/zh/00_hardware/images/HDG/image047.png
new file mode 100755
index 0000000..fd20673
Binary files /dev/null and b/zh/00_hardware/images/HDG/image047.png differ
diff --git a/zh/00_hardware/images/HDG/image048.png b/zh/00_hardware/images/HDG/image048.png
new file mode 100755
index 0000000..8b799a7
Binary files /dev/null and b/zh/00_hardware/images/HDG/image048.png differ
diff --git a/zh/00_hardware/images/HDG/image049.png b/zh/00_hardware/images/HDG/image049.png
new file mode 100755
index 0000000..220c8e4
Binary files /dev/null and b/zh/00_hardware/images/HDG/image049.png differ
diff --git a/zh/00_hardware/images/HDG/image050.png b/zh/00_hardware/images/HDG/image050.png
new file mode 100755
index 0000000..00b7342
Binary files /dev/null and b/zh/00_hardware/images/HDG/image050.png differ
diff --git a/zh/00_hardware/images/HDG/image051.png b/zh/00_hardware/images/HDG/image051.png
new file mode 100755
index 0000000..9f3e018
Binary files /dev/null and b/zh/00_hardware/images/HDG/image051.png differ
diff --git a/zh/00_hardware/images/HDG/image052.png b/zh/00_hardware/images/HDG/image052.png
new file mode 100755
index 0000000..5bb3873
Binary files /dev/null and b/zh/00_hardware/images/HDG/image052.png differ
diff --git a/zh/00_hardware/images/HDG/image053.png b/zh/00_hardware/images/HDG/image053.png
new file mode 100755
index 0000000..b1130bb
Binary files /dev/null and b/zh/00_hardware/images/HDG/image053.png differ
diff --git a/zh/00_hardware/images/HDG/logo.png b/zh/00_hardware/images/HDG/logo.png
new file mode 100755
index 0000000..aa48558
Binary files /dev/null and b/zh/00_hardware/images/HDG/logo.png differ
diff --git a/zh/00_hardware/images/K230D_package.png b/zh/00_hardware/images/K230D_package.png
new file mode 100755
index 0000000..5e14df5
Binary files /dev/null and b/zh/00_hardware/images/K230D_package.png differ
diff --git a/zh/00_hardware/images/K230_DEMO_BOARD_USAGE_GUIDE/image1.png b/zh/00_hardware/images/K230_DEMO_BOARD_USAGE_GUIDE/image1.png
new file mode 100755
index 0000000..9d384db
Binary files /dev/null and b/zh/00_hardware/images/K230_DEMO_BOARD_USAGE_GUIDE/image1.png differ
diff --git a/zh/00_hardware/images/K230_DEMO_BOARD_USAGE_GUIDE/image10.png b/zh/00_hardware/images/K230_DEMO_BOARD_USAGE_GUIDE/image10.png
new file mode 100755
index 0000000..922797f
Binary files /dev/null and b/zh/00_hardware/images/K230_DEMO_BOARD_USAGE_GUIDE/image10.png differ
diff --git a/zh/00_hardware/images/K230_DEMO_BOARD_USAGE_GUIDE/image11.png b/zh/00_hardware/images/K230_DEMO_BOARD_USAGE_GUIDE/image11.png
new file mode 100755
index 0000000..1b774a2
Binary files /dev/null and b/zh/00_hardware/images/K230_DEMO_BOARD_USAGE_GUIDE/image11.png differ
diff --git a/zh/00_hardware/images/K230_DEMO_BOARD_USAGE_GUIDE/image12.png b/zh/00_hardware/images/K230_DEMO_BOARD_USAGE_GUIDE/image12.png
new file mode 100755
index 0000000..ce35fe1
Binary files /dev/null and b/zh/00_hardware/images/K230_DEMO_BOARD_USAGE_GUIDE/image12.png differ
diff --git a/zh/00_hardware/images/K230_DEMO_BOARD_USAGE_GUIDE/image13.png b/zh/00_hardware/images/K230_DEMO_BOARD_USAGE_GUIDE/image13.png
new file mode 100755
index 0000000..014c3ff
Binary files /dev/null and b/zh/00_hardware/images/K230_DEMO_BOARD_USAGE_GUIDE/image13.png differ
diff --git a/zh/00_hardware/images/K230_DEMO_BOARD_USAGE_GUIDE/image14.png b/zh/00_hardware/images/K230_DEMO_BOARD_USAGE_GUIDE/image14.png
new file mode 100755
index 0000000..db4e350
Binary files /dev/null and b/zh/00_hardware/images/K230_DEMO_BOARD_USAGE_GUIDE/image14.png differ
diff --git a/zh/00_hardware/images/K230_DEMO_BOARD_USAGE_GUIDE/image15.png b/zh/00_hardware/images/K230_DEMO_BOARD_USAGE_GUIDE/image15.png
new file mode 100755
index 0000000..cddec69
Binary files /dev/null and b/zh/00_hardware/images/K230_DEMO_BOARD_USAGE_GUIDE/image15.png differ
diff --git a/zh/00_hardware/images/K230_DEMO_BOARD_USAGE_GUIDE/image16.png b/zh/00_hardware/images/K230_DEMO_BOARD_USAGE_GUIDE/image16.png
new file mode 100755
index 0000000..1bac144
Binary files /dev/null and b/zh/00_hardware/images/K230_DEMO_BOARD_USAGE_GUIDE/image16.png differ
diff --git a/zh/00_hardware/images/K230_DEMO_BOARD_USAGE_GUIDE/image17.png b/zh/00_hardware/images/K230_DEMO_BOARD_USAGE_GUIDE/image17.png
new file mode 100755
index 0000000..bdec382
Binary files /dev/null and b/zh/00_hardware/images/K230_DEMO_BOARD_USAGE_GUIDE/image17.png differ
diff --git a/zh/00_hardware/images/K230_DEMO_BOARD_USAGE_GUIDE/image18.png b/zh/00_hardware/images/K230_DEMO_BOARD_USAGE_GUIDE/image18.png
new file mode 100755
index 0000000..0a13cf6
Binary files /dev/null and b/zh/00_hardware/images/K230_DEMO_BOARD_USAGE_GUIDE/image18.png differ
diff --git a/zh/00_hardware/images/K230_DEMO_BOARD_USAGE_GUIDE/image19.png b/zh/00_hardware/images/K230_DEMO_BOARD_USAGE_GUIDE/image19.png
new file mode 100755
index 0000000..74a6e73
Binary files /dev/null and b/zh/00_hardware/images/K230_DEMO_BOARD_USAGE_GUIDE/image19.png differ
diff --git a/zh/00_hardware/images/K230_DEMO_BOARD_USAGE_GUIDE/image21.png b/zh/00_hardware/images/K230_DEMO_BOARD_USAGE_GUIDE/image21.png
new file mode 100755
index 0000000..25dcbf9
Binary files /dev/null and b/zh/00_hardware/images/K230_DEMO_BOARD_USAGE_GUIDE/image21.png differ
diff --git a/zh/00_hardware/images/K230_DEMO_BOARD_USAGE_GUIDE/image22.png b/zh/00_hardware/images/K230_DEMO_BOARD_USAGE_GUIDE/image22.png
new file mode 100755
index 0000000..1f050ad
Binary files /dev/null and b/zh/00_hardware/images/K230_DEMO_BOARD_USAGE_GUIDE/image22.png differ
diff --git a/zh/00_hardware/images/K230_DEMO_BOARD_USAGE_GUIDE/image23.png b/zh/00_hardware/images/K230_DEMO_BOARD_USAGE_GUIDE/image23.png
new file mode 100755
index 0000000..464329b
Binary files /dev/null and b/zh/00_hardware/images/K230_DEMO_BOARD_USAGE_GUIDE/image23.png differ
diff --git a/zh/00_hardware/images/K230_DEMO_BOARD_USAGE_GUIDE/image3.png b/zh/00_hardware/images/K230_DEMO_BOARD_USAGE_GUIDE/image3.png
new file mode 100755
index 0000000..3a98d83
Binary files /dev/null and b/zh/00_hardware/images/K230_DEMO_BOARD_USAGE_GUIDE/image3.png differ
diff --git a/zh/00_hardware/images/K230_DEMO_BOARD_USAGE_GUIDE/image4.png b/zh/00_hardware/images/K230_DEMO_BOARD_USAGE_GUIDE/image4.png
new file mode 100755
index 0000000..251761d
Binary files /dev/null and b/zh/00_hardware/images/K230_DEMO_BOARD_USAGE_GUIDE/image4.png differ
diff --git a/zh/00_hardware/images/K230_DEMO_BOARD_USAGE_GUIDE/image5.png b/zh/00_hardware/images/K230_DEMO_BOARD_USAGE_GUIDE/image5.png
new file mode 100755
index 0000000..28843dd
Binary files /dev/null and b/zh/00_hardware/images/K230_DEMO_BOARD_USAGE_GUIDE/image5.png differ
diff --git a/zh/00_hardware/images/K230_DEMO_BOARD_USAGE_GUIDE/image6.png b/zh/00_hardware/images/K230_DEMO_BOARD_USAGE_GUIDE/image6.png
new file mode 100755
index 0000000..44d734f
Binary files /dev/null and b/zh/00_hardware/images/K230_DEMO_BOARD_USAGE_GUIDE/image6.png differ
diff --git a/zh/00_hardware/images/K230_DEMO_BOARD_USAGE_GUIDE/image7.png b/zh/00_hardware/images/K230_DEMO_BOARD_USAGE_GUIDE/image7.png
new file mode 100755
index 0000000..ce9aa6a
Binary files /dev/null and b/zh/00_hardware/images/K230_DEMO_BOARD_USAGE_GUIDE/image7.png differ
diff --git a/zh/00_hardware/images/K230_DEMO_BOARD_USAGE_GUIDE/image8.png b/zh/00_hardware/images/K230_DEMO_BOARD_USAGE_GUIDE/image8.png
new file mode 100755
index 0000000..9197667
Binary files /dev/null and b/zh/00_hardware/images/K230_DEMO_BOARD_USAGE_GUIDE/image8.png differ
diff --git a/zh/00_hardware/images/K230_DEMO_BOARD_USAGE_GUIDE/image9.png b/zh/00_hardware/images/K230_DEMO_BOARD_USAGE_GUIDE/image9.png
new file mode 100755
index 0000000..2fd962c
Binary files /dev/null and b/zh/00_hardware/images/K230_DEMO_BOARD_USAGE_GUIDE/image9.png differ
diff --git a/zh/00_hardware/images/K230_application_1.png b/zh/00_hardware/images/K230_application_1.png
new file mode 100755
index 0000000..8b5d1b5
Binary files /dev/null and b/zh/00_hardware/images/K230_application_1.png differ
diff --git a/zh/00_hardware/images/K230_application_2.png b/zh/00_hardware/images/K230_application_2.png
new file mode 100755
index 0000000..f1ede46
Binary files /dev/null and b/zh/00_hardware/images/K230_application_2.png differ
diff --git a/zh/00_hardware/images/K230_block_diagram.png b/zh/00_hardware/images/K230_block_diagram.png
new file mode 100755
index 0000000..8edeb16
Binary files /dev/null and b/zh/00_hardware/images/K230_block_diagram.png differ
diff --git a/zh/00_hardware/images/K230_package.png b/zh/00_hardware/images/K230_package.png
new file mode 100755
index 0000000..49aac7f
Binary files /dev/null and b/zh/00_hardware/images/K230_package.png differ
diff --git a/zh/00_hardware/images/canaan-cover.png b/zh/00_hardware/images/canaan-cover.png
new file mode 100755
index 0000000..0319765
Binary files /dev/null and b/zh/00_hardware/images/canaan-cover.png differ
diff --git a/zh/00_hardware/images/canaan-lable.png b/zh/00_hardware/images/canaan-lable.png
new file mode 100755
index 0000000..009a662
Binary files /dev/null and b/zh/00_hardware/images/canaan-lable.png differ
diff --git a/zh/00_hardware/images/logo.png b/zh/00_hardware/images/logo.png
new file mode 100755
index 0000000..aa48558
Binary files /dev/null and b/zh/00_hardware/images/logo.png differ
diff --git "a/zh/01_software/board/K230_SDK_\344\275\277\347\224\250\350\257\264\346\230\216.md" "b/zh/01_software/board/K230_SDK_\344\275\277\347\224\250\350\257\264\346\230\216.md"
new file mode 100755
index 0000000..92586a3
--- /dev/null
+++ "b/zh/01_software/board/K230_SDK_\344\275\277\347\224\250\350\257\264\346\230\216.md"
@@ -0,0 +1,712 @@
+# K230 SDK使用说明
+
+
+
+版权所有©2023北京嘉楠捷思信息技术有限公司
+
+
+
+## 免责声明
+
+您购买的产品、服务或特性等应受北京嘉楠捷思信息技术有限公司(“本公司”,下同)及其关联公司的商业合同和条款的约束,本文档中描述的全部或部分产品、服务或特性可能不在您的购买或使用范围之内。除非合同另有约定,本公司不对本文档的任何陈述、信息、内容的正确性、可靠性、完整性、适销性、符合特定目的和不侵权提供任何明示或默示的声明或保证。除非另有约定,本文档仅作为使用指导参考。
+
+由于产品版本升级或其他原因,本文档内容将可能在未经任何通知的情况下,不定期进行更新或修改。
+
+## 商标声明
+
+、“嘉楠”和其他嘉楠商标均为北京嘉楠捷思信息技术有限公司及其关联公司的商标。本文档可能提及的其他所有商标或注册商标,由各自的所有人拥有。
+
+**版权所有 © 2023北京嘉楠捷思信息技术有限公司。保留一切权利。**
+非经本公司书面许可,任何单位和个人不得擅自摘抄、复制本文档内容的部分或全部,并不得以任何形式传播。
+
+
+
+## 目录
+
+[TOC]
+
+## 前言
+
+### 概述
+
+本文档主要介绍K230 SDK 的安装和使用。
+
+### 读者对象
+
+本文档(本指南)主要适用于以下人员:
+
+- 技术支持工程师
+- 软件开发工程师
+
+### 缩略词定义
+
+| 简称 | 说明 |
+|------|------|
+| | |
+
+### 修订记录
+
+| 文档版本号 | 修改说明 | 修改者 | 日期 |
+| ---------- | -------------------------- | ------ | ---------- |
+| V1.0 | 初版 | 杨光 | 2023-03-10 |
+| V1.1 | 新增安全镜像及emmc烧录说明 | 王建新 | 2023-04-07 |
+| V1.2 | 新增spinor镜像烧录说明 | 王建新 | 2023-05-05 |
+| V1.3 | 快起和安全镜像说明 | 王建新 | 2023-05-29 |
+| V1.4 | 大核自启动程序说明 | 郝海波 | 2023-06-1 |
+| v1.5 | usip lp4 | 王建新 | 2023-06-12 |
+| V1.6 | 修改大核自启动程序说明 | 赵忠祥 | 2023-06-28 |
+| v1.7 | 增加启动介质分区章节,镜像烧录章节调整, | 王建新 | 2023-07-05 |
+
+## 1. 概述
+
+### 1.1 SDK软件架构概述
+
+K230 SDK 是面向K230 开发板的软件开发包,包含了基于Linux&RT-smart 双核异构系统开发需要用到的源代码,工具链和其他相关资源。
+
+K230 SDK 软件架构层次如图 1-1 所示:
+
+
+
+图1-1 K230 SDK 软件架构图
+
+## 2. 开发环境搭建
+
+### 2.1 支持的硬件
+
+K230-USIP-LP3-EVB:具体硬件信息参考 《K230-USIP-LP3-EVB-硬件使用说明》
+
+K230-USIP-LP4-EVB:具体硬件信息参考 《K230-USIP-LP4-EVB-硬件使用说明》
+
+### 2.2 开发环境搭建
+
+#### 2.2.1 编译环境
+
+| 主机环境 | 描述 |
+|-----------------------------|------------------------------------------------------|
+| Docker编译环境 | SDK提供了dockerfile,可以生成docker镜像,用于编译SDK |
+| Ubuntu 20.04.4 LTS (x86_64) | SDK可以在ubuntu 20.04环境下编译 |
+
+K230 SDK需要在linux环境下编译,SDK支持docker环境编译,SDK开发包中发布了docker file(`tools/docker/Dockerfile`),可以生成docker镜像。具体dockerfile使用和编译步骤,详见4.3.1章节。
+
+SDK使用的Docker 镜像以ubuntu 20.04 为基础,如果不使用docker编译环境,可以在ubuntu 20.04 主机环境下参考dockerfile的内容,安装相关HOST package和工具链后,编译SDK。
+
+K230 SDK没有在其他Linux版本的主机环境下验证过,不保证SDK可以在其他环境下编译通过。
+
+#### 2.2.2 SDK开发包
+
+K230 SDK以压缩包的形式发布,或者自己使用`git clone https://github.com/kendryte/k230_sdk`命令下载。
+
+### 2.3 单板准备
+
+本章节以K230-USIP-LP3-EVB为例
+
+请准备如下硬件:
+
+- K230-USIP-LP3-EVB
+- Typec USB线 至少2根
+- TypeC USB 转以太网转换器(可选)
+- 网线一根(可选)
+- SD卡(可选)
+
+说明:TypeC USB 转以太网推荐型号是
+
+参考《K230-USIP-LP3-EVB-硬件使用说明》准备开发板。
+
+K230 EVB通过USB提供两路调试串口,windows下使用调试串口,需要安装USB转串口驱动程序,驱动下载链接如下:
+
+
+
+安装了驱动后,板子上电,PC使用type C数据线连接EVB的调试串口后,可以发现两个USB串口设备,如下图所示:
+
+
+
+图2-1 USB串口设备
+
+以上图为例,`COM47`为小核的调试串口,`COM48`为大核的调试串口。
+
+串口波特率设置: `115200 8N1`
+
+## 3. SDK 安装准备工作
+
+### 3.1 安装SDK
+
+K230 SDK开发包采用压缩包的方式发布,在linux环境下使用。
+
+### 3.2 SDK 目录结构
+
+K230 SDK目录结构如下图所示:
+
+```shell
+k230_sdk
+├── configs
+│ ├── k230_evb_defconfig
+│ └── k230_evb_usiplpddr4_defconfig
+├── Kconfig
+├── LICENSE
+├── Makefile
+├── parse.mak
+├── README.md
+├── repo.mak
+├── src
+│ ├── big
+│ │ ├── mpp
+│ │ ├── rt-smart
+│ │ └── unittest
+│ ├── common
+│ │ ├── cdk
+│ │ └── opensbi
+│ ├── little
+│ │ ├── buildroot-ext
+│ │ ├── linux
+│ │ └── uboot
+│ └── reference
+│ ├── ai_poc
+│ ├── business_poc
+│ └── fancy_poc
+└── tools
+ ├── docker
+ │ └── Dockerfile
+ ├── doxygen
+ ├── firmware_gen.py
+ ├── gen_image_cfg
+ ├── gen_image.sh
+ ├── get_download_url.sh
+ └── post_copy_rootfs
+```
+
+各个目录用途描述如下:
+
+- `configs`: 存放SDK的板级默认配置,主要包含如下信息:参考板类型,toolchain路径,
+
+ 内存布局规划,存储规划配置等
+
+- `src`:源代码目录,分为 大核代码(`big`),公共组件(`common`),小核代码(`little`)三个目录。
+
+ 大核代码包含:`rt-smart`操作系统代码,`mpp`代码,`unittest`代码
+
+ 公共组件包含:`cdk`代码和`opensbi`代码
+
+ 小核代码包含:`linux`内核代码,`buildroot`代码,`uboot`代码
+
+- `tools`:存放各种工具,脚本等。例如`kconfig`,`doxygen`,`dockerfile`等
+
+## 4. SDK 编译
+
+### 4.1 SDK 编译介绍
+
+K230 SDK支持一键编译大小核操作系统和公共组件,生成可以烧写的镜像文件,用于部署到开发板启动运行。设备上linux系统的用户名是root无密码;
+
+### 4.2 SDK 配置
+
+K230 SDK采用Kconfig作为SDK配置接口,默认支持的板级配置放在configs目录下。
+
+#### 4.2.1 配置文件说明
+
+`k230_evb_defconfig` :基于K230 USIP LP3 EVB的默认SDK配置文件
+`k230_evb_usiplpddr4_defconfig` :基于K230 USIP LP4 EVB的默认SDK配置文件
+
+### 4.3 编译 SDK
+
+#### 4.3.1 编译步骤
+
+说明:本章节命令仅供参考,文件名请根据实际情况进行替换。
+Setp 1:下载代码
+
+`git clone https://github.com/kendryte/k230_sdk`
+
+Step 2:进入SDK根目录
+
+`cd k230_sdk`
+
+Step 3:下载toolchain
+
+```shell
+source tools/get_download_url.sh && make prepare_sourcecode
+```
+
+>`make prepare_sourcecode` will download both Linux and RT-Smart toolchain, buildroot package and AI package from Microsoft Azure cloud server with CDN, the download cost time may based on your network connection speed.
+
+Step 4:生成docker镜像(第一次编译需要,已经生成docker镜像后跳过此步骤)
+
+`docker build -f tools/docker/Dockerfile -t k230_docker tools/docker`
+
+Step 5: 进入docker环境,
+
+`docker run -u root -it -v $(pwd):$(pwd) -v $(pwd)/toolchain:/opt/toolchain -w $(pwd) k230_docker /bin/bash`
+
+Step 6: Docker环境下执行下面命令进行编译SDK
+
+```bash
+make CONF=k230_evb_defconfig #编译K230-USIP-LP4-EVB板子镜像
+#make CONF=k230_evb_usiplpddr4_defconfig #编译K230-USIP-LP4-EVB板子镜像
+```
+
+> 编译K230-USIP-LP4-EVB板子镜像使用`make CONF=k230_evb_usiplpddr4_defconfig`命令
+> 编译K230-USIP-LP3-EVB板子镜像使用`make CONF=k230_evb_defconfig` 命令。
+
+特别的:
+如果需要nand镜像,先做以下修改,然后重新进行步骤'Step 5',进行编译。
+1)小核uboot下,修改k230_sdk\src\little\uboot\arch\riscv\dts\k230_evb.dts 中spi0节点的配置,即测试nandflash时,编译前将compatible 设置为 "spi-nand";测试norflash时,将compatible设为"jedec,spi-nor",
+&spi0 {
+ spi-flash@0 {
+ //compatible = "spi-nand";
+ compatible = "jedec,spi-nor";
+ reg = <0>;
+
+2)小核linux下,修改k230_sdk\src\little\linux\arch\riscv\boot\dts\kendryte\k230_evb.dtsi 中spi0节点的配置,将k230_evb_nand.dtsi内容覆盖到k230_evb.dtsi,以修改SPI0节点的内容。(两个dtsi仅SPI0节点内容不同)
+3)k230_sdk下,修改k230_sdk\parse.mak,禁用:'$(K230_SDK_ROOT)/tools/menuconfig_to_code.sh'
+
+#### 4.3.2 编译输出产物
+
+编译完成后,在`output/xx_defconfig/images`目录下可以看到编译输出产物。
+
+
+
+图4-1 编译产物
+
+`images`目录下镜像文件说明如下:
+
+`sysimage-sdcard.img` -------------是sd和emmc的非安全启动镜像;
+
+`sysimage-sdcard.img.gz` --------是SD和emmc的非安全启动镜像压缩包(sysimage-sdcard.img文件的gzip压缩包),烧录时需要先解压缩。
+
+`sysimage-sdcard_aes.img.gz`是SD和emmc的aes安全启动镜像压缩包,烧录时需要先解压缩。
+
+`sysimage-sdcard_sm.img.gz`是SD和emmc的sm安全启动镜像压缩包,烧录时需要先解压缩。
+
+安全镜像默认不会产生,如果需要安全镜像请参考4.3.4使能安全镜像。
+
+大核系统的编译产物放在`images/big-core`目录下。
+
+小核系统的编译产物放在`images/little-core`目录下。
+
+#### 4.3.3 非快起镜像
+
+sdk默认编译的是快起镜像(uboot直接启动系统,不会进入uboot命令行),如果需要进入uboot命令行,请参考下面取消`CONFIG_QUICK_BOOT`配置:
+
+在sdk主目录 执行 `make menuconfig` ,选择`board configuration`,取消`quick boot` 配置选项。
+
+#### 4.3.4 安全镜像
+
+sdk默认不产生安全镜像,如果需要安全镜像,请参考下面增加CONFIG_GEN_SECURITY_IMG配置:
+
+在sdk主目录 执行`make menuconfig` ,选择`board configuration`,配上`create security image` 选项。
+
+## 5. SDK 镜像烧写
+
+### 5.1 sd卡镜像烧录
+
+#### 5.1.1 ubuntu下烧录
+
+在sd卡插到宿主机之前,输入:
+
+`ls -l /dev/sd\*`
+
+查看当前的存储设备。
+
+将sd卡插入宿主机后,再次输入:
+
+`ls -l /dev/sd\*`
+
+查看此时的存储设备,新增加的就是 sd 卡设备节点。
+
+假设/dev/sdc 就是 sd卡设备节点,执行如下命令烧录SD卡:
+
+`sudo dd if=sysimage-sdcard.img of=/dev/sdc bs=1M oflag=sync`
+
+说明:`sysimage-sdcard.img`可以是`images`目录下的`sysimage-sdcard.img`文件,或者`sysimage-sdcard_aes.img.gz`、`sysimage-sdcard.img.gz`、`sysimage-sdcard_sm.img.gz`文件解压缩后的文件。
+
+#### 5.1.2 Windows下烧录
+
+Windows下可通过balena Etcher工具对sd卡进行烧录(balena Etcher工具下载地址下载`T-Head-DebugServer`软件和《DebugServer User Guide v5.6》,并参考《DebugServer User Guide v5.6》在pc电脑上安装`T-Head-DebugServer`软件;
+
+
+
+
+
+2.准备下图所示平头哥 cklink、usb线、k230 evb板
+
+
+
+### 8.2 调试
+
+1.参考下图把cklink 、k230 evb板子、pc电脑 连接起来,随后给evb上电。
+
+
+
+2.电脑上打开第1步安装的T-HeadDebugServer软件,看到类似如下图打印说明连接成功,如果连接失败请参考《DebugServer User Guide v5.6》排查失败原因。
+
+
+
+3.在编译代码的服务器上启动riscv64-unknown-linux-gnu-gdb执行target remote xx.xx.xx.xx1025 命令连接板子,连接成功后进行gdb调试。
+
+
+
+## 9. SDK启动
+
+当前版本默认编译生成的镜像,烧录到板子上后,大核会自动运行一个程序。
+
+SDK V0.7版本的自启动程序为基于OV9732摄像头的人脸检测程序,启动后可以在大核的控制台端输入'q'退出该程序。
+
+若使用的EVB板没有连接OV9732,则该自启动程序会报错,同样在大核的控制台端输入'q'退出该程序。
+若需要取消大核的自启动功能,需将 `k230_sdk/src/big/rt-smart/init.sh` 中的内容注释掉。
+
+SDK V0.8版本的自启动程序是基于IMX335摄像头(板载晶振)的人脸检测程序,启动后在大核的控制台输入'q'可以退出程序。
+
+同样的,如果没有连接IMX335,则自启动程序报错,程序自动退出。按回车即可回到控制台。
diff --git "a/zh/01_software/board/ai/K230_nncase_\345\274\200\345\217\221\346\214\207\345\215\227.md" "b/zh/01_software/board/ai/K230_nncase_\345\274\200\345\217\221\346\214\207\345\215\227.md"
new file mode 100644
index 0000000..15269bc
--- /dev/null
+++ "b/zh/01_software/board/ai/K230_nncase_\345\274\200\345\217\221\346\214\207\345\215\227.md"
@@ -0,0 +1,2454 @@
+# K230 nncase开发指南
+
+
+
+版权所有©2023北京嘉楠捷思信息技术有限公司
+
+
+
+## 免责声明
+
+您购买的产品、服务或特性等应受北京嘉楠捷思信息技术有限公司(“本公司”,下同)及其关联公司的商业合同和条款的约束,本文档中描述的全部或部分产品、服务或特性可能不在您的购买或使用范围之内。除非合同另有约定,本公司不对本文档的任何陈述、信息、内容的正确性、可靠性、完整性、适销性、符合特定目的和不侵权提供任何明示或默示的声明或保证。除非另有约定,本文档仅作为使用指导参考。
+
+由于产品版本升级或其他原因,本文档内容将可能在未经任何通知的情况下,不定期进行更新或修改。
+
+## 商标声明
+
+、“嘉楠”和其他嘉楠商标均为北京嘉楠捷思信息技术有限公司及其关联公司的商标。本文档可能提及的其他所有商标或注册商标,由各自的所有人拥有。
+
+**版权所有 © 2023北京嘉楠捷思信息技术有限公司。保留一切权利。**
+非经本公司书面许可,任何单位和个人不得擅自摘抄、复制本文档内容的部分或全部,并不得以任何形式传播。
+
+
+
+## 目录
+
+[TOC]
+
+## 前言
+
+### 概述
+
+本文档为K230 nncase的使用说明文档,提供给用户如何安装nncase, 如何调用compiler APIs编译神经网络模型和runtime APIs编写AI推理程序.
+
+### 读者对象
+
+本文档(本指南)主要适用于以下人员:
+
+- 技术支持工程师
+- 软件开发工程师
+
+### 缩略词定义
+
+| 简称 | 说明 |
+| ---- | -------------------------------------- |
+| PTQ | Post-training quantization, 训练后量化 |
+| MSE | mean-square error, 均方误差 |
+
+### 修订记录
+
+| 文档版本号 | 修改说明 | 修改者 | 日期 |
+| ---------- | --------------------------------------------------- | ------------------ | -------- |
+| V1.0 | 文档初版 | 张扬/霍成海 | 2023/4/7 |
+| V1.1 | 统一改成word格式, 完善ai2d | 张扬/霍成海 | 2023/5/5 |
+| V1.2 | nncase v2新架构 | 张扬/郑启航/霍成海 | 2023/6/2 |
+| V1.3 | nncase_k230_v2.1.0, ai2d/runtime_tensor支持物理地址 | 张扬 | 2023/7/3 |
+
+## 1. 概述
+
+### 1.1 什么是nncase
+
+nncase是一个为 AI 加速器设计的神经网络编译器, 目前支持的 target有cpu/K210/K510/K230等.
+
+nncase提供的功能
+
+- 支持多输入多输出网络,支持多分支结构
+- 静态内存分配,不需要堆内存
+- 算子合并和优化
+- 支持 float 和uint8/int8量化推理
+- 支持训练后量化,使用浮点模型和量化校准集
+- 平坦模型,支持零拷贝加载
+
+nncase支持的神经网络模型格式
+
+- tflite
+- onnx
+
+### 1.2 nncase架构
+
+
+
+nncase软件栈包括compiler和runtime两部分。
+
+Compiler: 用于在PC上编译神经网络模型,最终生成kmodel文件。主要包括importer, IR, Evaluator, Quantize, Transform优化, Tiling, Partition, Schedule, Codegen等模块。
+
+- Importer: 将其它神经网络框架的模型导入到nncase中
+- IR: 中间表示, 分为importer导入的Neutral IR(设备无关)和Neutral IR经lowering转换生成的Target IR(设备相关)
+- Evaluator: Evaluator提供IR的解释执行能力,常被用于Constant Folding/PTQ Calibration等场景
+- Transform: 用于IR转换和图的遍历优化等
+- Quantize: 训练后量化, 对要量化的tensor加入量化标记, 根据输入的校正集, 调用 Evaluator进行解释执行, 收集tensor的数据范围, 插入量化/反量化结点, 最后优化消除不必要的量化/反量化结点等
+- Tiling: 受限于NPU较低的存储器容量,需要将大块计算进行拆分. 另外, 计算存在大量数据复用时选择Tiling参数会对时延和带宽产生影响
+- Partition: 将图按ModuleType进行切分, 切分后的每个子图会对应RuntimeModule, 不同类型的RuntimeModule对应不同的Device(cpu/K230)
+- Schedule: 根据优化后图中的数据依赖关系生成计算顺序并分配Buffer
+- Codegen: 对每个子图分别调用ModuleType对应的codegen,生成RuntimeModule
+
+Runtime: 集成于用户App, 提供加载kmodel/设置输入数据/KPU执行/获取输出数据等功能.
+
+### 1.3 开发环境
+
+#### 1.3.1 操作系统
+
+支持的操作系统包括Ubuntu 18.04/Ubuntu 20.04
+
+#### 1.3.2 软件环境
+
+| 序号 | 软件 | 版本号 |
+| ---- | --------------- | -------------------- |
+| 1 | python | 3.6/3.7/3.8/3.9/3.10 |
+| 2 | pip | \>=20.3 |
+| 3 | numpy | 1.19.5 |
+| 4 | onnx | 1.9.0 |
+| 5 | onnx-simplifier | 0.3.6 |
+| 6 | Onnxoptimizer | 0.2.6 |
+| 7 | Onnxruntime | 1.8.0 |
+| 8 | dotnet-runtime | 7.0 |
+
+#### 1.3.3 硬件环境
+
+K230 evb
+
+## 2. 编译模型APIs(Python)
+
+nncase提供了Python APIs, 用于在PC上编译神经网络模型
+
+### 2.1 支持的算子
+
+#### 2.1.1 tflite算子
+
+| Operator | Is Supported |
+| ----------------------- | ------------ |
+| ABS | Yes |
+| ADD | Yes |
+| ARG_MAX | Yes |
+| ARG_MIN | Yes |
+| AVERAGE_POOL_2D | Yes |
+| BATCH_MATMUL | Yes |
+| CAST | Yes |
+| CEIL | Yes |
+| CONCATENATION | Yes |
+| CONV_2D | Yes |
+| COS | Yes |
+| CUSTOM | Yes |
+| DEPTHWISE_CONV_2D | Yes |
+| DIV | Yes |
+| EQUAL | Yes |
+| EXP | Yes |
+| EXPAND_DIMS | Yes |
+| FLOOR | Yes |
+| FLOOR_DIV | Yes |
+| FLOOR_MOD | Yes |
+| FULLY_CONNECTED | Yes |
+| GREATER | Yes |
+| GREATER_EQUAL | Yes |
+| L2_NORMALIZATION | Yes |
+| LEAKY_RELU | Yes |
+| LESS | Yes |
+| LESS_EQUAL | Yes |
+| LOG | Yes |
+| LOGISTIC | Yes |
+| MAX_POOL_2D | Yes |
+| MAXIMUM | Yes |
+| MEAN | Yes |
+| MINIMUM | Yes |
+| MUL | Yes |
+| NEG | Yes |
+| NOT_EQUAL | Yes |
+| PAD | Yes |
+| PADV2 | Yes |
+| MIRROR_PAD | Yes |
+| PACK | Yes |
+| POW | Yes |
+| REDUCE_MAX | Yes |
+| REDUCE_MIN | Yes |
+| REDUCE_PROD | Yes |
+| RELU | Yes |
+| PRELU | Yes |
+| RELU6 | Yes |
+| RESHAPE | Yes |
+| RESIZE_BILINEAR | Yes |
+| RESIZE_NEAREST_NEIGHBOR | Yes |
+| ROUND | Yes |
+| RSQRT | Yes |
+| SHAPE | Yes |
+| SIN | Yes |
+| SLICE | Yes |
+| SOFTMAX | Yes |
+| SPACE_TO_BATCH_ND | Yes |
+| SQUEEZE | Yes |
+| BATCH_TO_SPACE_ND | Yes |
+| STRIDED_SLICE | Yes |
+| SQRT | Yes |
+| SQUARE | Yes |
+| SUB | Yes |
+| SUM | Yes |
+| TANH | Yes |
+| TILE | Yes |
+| TRANSPOSE | Yes |
+| TRANSPOSE_CONV | Yes |
+| QUANTIZE | Yes |
+| FAKE_QUANT | Yes |
+| DEQUANTIZE | Yes |
+| GATHER | Yes |
+| GATHER_ND | Yes |
+| ONE_HOT | Yes |
+| SQUARED_DIFFERENCE | Yes |
+| LOG_SOFTMAX | Yes |
+| SPLIT | Yes |
+| HARD_SWISH | Yes |
+
+#### 2.1.2 onnx算子
+
+| Operator | Is Supported |
+| --------------------- | ------------ |
+| Abs | Yes |
+| Acos | Yes |
+| Acosh | Yes |
+| And | Yes |
+| ArgMax | Yes |
+| ArgMin | Yes |
+| Asin | Yes |
+| Asinh | Yes |
+| Add | Yes |
+| AveragePool | Yes |
+| BatchNormalization | Yes |
+| Cast | Yes |
+| Ceil | Yes |
+| Celu | Yes |
+| Clip | Yes |
+| Compress | Yes |
+| Concat | Yes |
+| Constant | Yes |
+| ConstantOfShape | Yes |
+| Conv | Yes |
+| ConvTranspose | Yes |
+| Cos | Yes |
+| Cosh | Yes |
+| CumSum | Yes |
+| DepthToSpace | Yes |
+| DequantizeLinear | Yes |
+| Div | Yes |
+| Dropout | Yes |
+| Elu | Yes |
+| Exp | Yes |
+| Expand | Yes |
+| Equal | Yes |
+| Erf | Yes |
+| Flatten | Yes |
+| Floor | Yes |
+| Gather | Yes |
+| GatherElements | Yes |
+| GatherND | Yes |
+| Gemm | Yes |
+| GlobalAveragePool | Yes |
+| GlobalMaxPool | Yes |
+| Greater | Yes |
+| GreaterOrEqual | Yes |
+| GRU | Yes |
+| Hardmax | Yes |
+| HardSigmoid | Yes |
+| HardSwish | Yes |
+| Identity | Yes |
+| InstanceNormalization | Yes |
+| LayerNormalization | Yes |
+| LpNormalization | Yes |
+| LeakyRelu | Yes |
+| Less | Yes |
+| LessOrEqual | Yes |
+| Log | Yes |
+| LogSoftmax | Yes |
+| LRN | Yes |
+| LSTM | Yes |
+| MatMul | Yes |
+| MaxPool | Yes |
+| Max | Yes |
+| Min | Yes |
+| Mul | Yes |
+| Neg | Yes |
+| Not | Yes |
+| OneHot | Yes |
+| Pad | Yes |
+| Pow | Yes |
+| PRelu | Yes |
+| QuantizeLinear | Yes |
+| RandomNormal | Yes |
+| RandomNormalLike | Yes |
+| RandomUniform | Yes |
+| RandomUniformLike | Yes |
+| ReduceL1 | Yes |
+| ReduceL2 | Yes |
+| ReduceLogSum | Yes |
+| ReduceLogSumExp | Yes |
+| ReduceMax | Yes |
+| ReduceMean | Yes |
+| ReduceMin | Yes |
+| ReduceProd | Yes |
+| ReduceSum | Yes |
+| ReduceSumSquare | Yes |
+| Relu | Yes |
+| Reshape | Yes |
+| Resize | Yes |
+| ReverseSequence | Yes |
+| RoiAlign | Yes |
+| Round | Yes |
+| Rsqrt | Yes |
+| Selu | Yes |
+| Shape | Yes |
+| Sign | Yes |
+| Sin | Yes |
+| Sinh | Yes |
+| Sigmoid | Yes |
+| Size | Yes |
+| Slice | Yes |
+| Softmax | Yes |
+| Softplus | Yes |
+| Softsign | Yes |
+| SpaceToDepth | Yes |
+| Split | Yes |
+| Sqrt | Yes |
+| Squeeze | Yes |
+| Sub | Yes |
+| Sum | Yes |
+| Tanh | Yes |
+| Tile | Yes |
+| TopK | Yes |
+| Transpose | Yes |
+| Trilu | Yes |
+| ThresholdedRelu | Yes |
+| Upsample | Yes |
+| Unsqueeze | Yes |
+| Where | Yes |
+
+### 2.2 APIs
+
+目前编译模型APIs支持tflite/onnx/caffe等格式的深度学习模型。
+
+#### 2.2.1 CompileOptions
+
+【描述】
+
+CompileOptions类, 用于配置nncase编译选项
+
+【定义】
+
+```python
+class CompileOptions:
+ benchmark_only: bool
+ dump_asm: bool
+ dump_dir: str
+ dump_ir: bool
+ swapRB: bool
+ input_range: List[float]
+ input_shape: List[int]
+ input_type: str
+ is_fpga: bool
+ mean: List[float]
+ std: List[float]
+ output_type: str
+ preprocess: bool
+ quant_type: str
+ target: str
+ w_quant_type: str
+ use_mse_quant_w: bool
+ input_layout: str
+ output_layout: str
+ letterbox_value: float
+ tcu_num: int
+
+ def __init__(self) -> None:
+ self.benchmark_only = False
+ self.dump_asm = True
+ self.dump_dir = "tmp"
+ self.dump_ir = False
+ self.is_fpga = False
+ self.quant_type = "uint8"
+ self.target = "cpu"
+ self.w_quant_type = "uint8"
+ self.use_mse_quant_w = True
+ self.tcu_num = 0
+
+ self.preprocess = False
+ self.swapRB = False
+ self.input_range = []
+ self.input_shape = []
+ self.input_type = "float32"
+ self.mean = [0, 0, 0]
+ self.std = [1, 1, 1]
+ self.input_layout = ""
+ self.output_layout = ""
+ self.letterbox_value = 0
+```
+
+【属性】
+
+| 名称 | 类型 | 描述 |
+| --------------- | ------ | ------------------------------------------------------------ |
+| dump_asm | bool | 指定是否dump asm汇编文件, 默认为True |
+| dump_dir | bool | 前面指定dump_ir等开关后, 这里指定dump的目录, 默认为"tmp" |
+| dump_ir | bool | 指定是否dump IR, 默认为False |
+| swapRB | bool | 是否交换RGB输入数据的红和蓝两个通道(RGB--\>BGR或者BGR--\>RGB),默认为False |
+| input_range | list | 输入数据反量化后对应浮点数的范围,默认为`[0,1]` |
+| input_shape | list | 指定输入数据的shape,input_shape的layout需要与input layout保持一致,输入数据的input_shape与模型的input shape不一致时会进行letterbox操作(resize/pad等) |
+| input_type | string | 指定输入数据的类型, 默认为'float32' |
+| mean | list | 前处理标准化参数均值,默认为`[0, 0, 0]` |
+| std | list | 前处理标准化参数方差,默认为`[1, 1, 1]` |
+| output_type | string | 指定输出数据的类型, 如'float32', 'uint8'(仅用于指定量化情况下) |
+| preprocess | bool | 是否开启前处理,默认为False |
+| target | string | 指定编译目标, 如'k210', 'k510', ‘k230’ |
+| letterbox_value | float | 指定前处理letterbox的填充值 |
+| input_layout | string | 指定输入数据的layout, 如'NCHW', 'NHWC'. 若输入数据layout与模型本身layout不同, nncase会插入transpose进行转换 |
+| output_layout | string | 指定输出数据的layout, 如'NCHW', 'NHWC'. 若输出数据layout与模型本身layout不同, nncase会插入transpose进行转换. |
+
+【注意】
+
+1. input range为浮点数的范围,即如果输入数据类型为uint8,则input range为反量化到浮点之后的范围(可以不为0\~1),可以自由指定.
+1. input_shape需要按照input_layout进行指定,以`[1,224,224,3]`为例,如果input_layout为NCHW,则input_shape需指定为`[1,3,224,224]`;input_layout为NHWC,则input_shape需指定为`[1,224,224,3]`.
+1. mean和std为浮点数进行normalize的参数,用户可以自由指定.
+1. 使用letterbox功能时,需要限制输入size在1.5MB内,单channel的size在0.75MB内.
+
+例如:
+
+1. 输入数据类型设定为uint8,input_range设定为`[0,255]`,则反量化的作用只是进行类型转化,将uint8的数据转化为float32,mean和std参数仍然可以按照0\~255的数据进行指定.
+1. 输入数据类型设定为uint8,input_range设定为`[0,1]`,则会将定点数反量化为范围为`[0,1]`的浮点数, mean 和std需要按照新的浮点数范围进行指定。
+
+前处理流程如下(图中绿色节点皆为可选):
+
+
+
+【示例】
+
+实例化CompileOptions, 配置各属性的值
+
+```python
+# compile_options
+compile_options = nncase.CompileOptions()
+compile_options.target = args.target
+compile_options.preprocess = True
+compile_options.swapRB = False
+compile_options.input_shape = input_shape
+compile_options.input_type = 'uint8'
+compile_options.input_range = [0, 255]
+compile_options.mean = [127.5, 127.5, 127.5]
+compile_options.std = [127.5, 127.5, 127.5]
+compile_options.input_layout = 'NCHW'
+compile_options.dump_ir = True
+compile_options.dump_asm = True
+compile_options.dump_dir = dump_dir
+```
+
+#### 2.2.2 ImportOptions
+
+【描述】
+
+ImportOptions类, 用于配置nncase导入选项
+
+【定义】
+
+```python
+class ImportOptions:
+ def __init__(self) -> None:
+ pass
+```
+
+【示例】
+
+实例化ImportOptions, 配置各属性的值
+
+```python
+#import_options
+import_options = nncase.ImportOptions()
+```
+
+#### 2.2.3 PTQTensorOptions
+
+【描述】
+
+PTQTensorOptions类, 用于配置nncase PTQ选项
+
+【定义】
+
+```python
+class PTQTensorOptions:
+ calibrate_method: str
+ input_mean: float
+ input_std: float
+ samples_count: int
+ quant_type: str
+ w_quant_type: str
+ finetune_weights_method: str
+ use_mix_quant: bool
+ quant_scheme: str
+ export_quant_scheme: bool
+ export_weight_range_by_channel: bool
+ cali_data: List[RuntimeTensor]
+
+ def __init__(self) -> None:
+ self.calibrate_method: str = "Kld"
+ self.input_mean: float = 0.5
+ self.input_std: float = 0.5
+ self.samples_count: int = 5
+ self.quant_type: str = "uint8"
+ self.w_quant_type: str = "uint8"
+ self.finetune_weights_method: str = "NoFineTuneWeights"
+ self.use_mix_quant: bool = False
+ self.quant_scheme: str = ""
+ self.export_quant_scheme: bool = False
+ self.export_weight_range_by_channel: bool = False
+ self.cali_data: List[RuntimeTensor] = []
+
+ def set_tensor_data(self, data: List[List[np.ndarray]]) -> None:
+ reshape_data = list(map(list, zip(*data)))
+ self.cali_data = [RuntimeTensor.from_numpy(
+ d) for d in itertools.chain.from_iterable(reshape_data)]
+```
+
+【属性】
+
+| 名称 | 类型 | 描述 |
+| ----------------------- | ------ | ------------------------------------------------------------ |
+| calibrate_method | string | 校准方法 , 支持'NoClip', 'Kld', 默认值为'Kld' |
+| input_mean | float | 用户指定输入的均值,默认值为0.5 |
+| input_std | float | 用户指定输入的方差,默认值为0.5 |
+| samples_count | Int | 样本个数 |
+| quant_type | string | 指定数据量化类型, 如'uint8', 'int8', 默认值为'uint8' |
+| w_quant_type | string | 指定权重量化类型, 如'uint8', 'int8', 默认值为’uint8’ |
+| finetune_weights_method | string | 调整权重方法,有'NoFineTuneWeights', 'UseSquant',默认值为'NoFineTuneWeights' |
+| use_mix_quant | bool | 是否使用混合量化,默认值为False |
+
+【示例】
+
+```python
+# ptq_options
+ptq_options = nncase.PTQTensorOptions()
+ptq_options.samples_count = 6
+ptq_options.set_tensor_data(generate_data(input_shape, ptq_options.samples_count, args.dataset))
+compiler.use_ptq(ptq_options)
+```
+
+#### 2.2.4 set_tensor_data
+
+【描述】
+
+设置tensor数据
+
+【定义】
+
+```python
+ def set_tensor_data(self, data: List[List[np.ndarray]]) -> None:
+ reshape_data = list(map(list, zip(*data)))
+ self.cali_data = [RuntimeTensor.from_numpy(
+ d) for d in itertools.chain.from_iterable(reshape_data)]
+```
+
+【参数】
+
+| 名称 | 类型 | 描述 |
+| ---------- | ------ | -------------- |
+| data | List[List[np.ndarray] | 读取的校准数据 |
+
+【返回值】
+
+无
+
+【示例】
+
+```shell
+# ptq_options
+ptq_options = nncase.PTQTensorOptions()
+ptq_options.samples_count = 6
+ptq_options.set_tensor_data(generate_data(input_shape, ptq_options.samples_count, args.dataset))
+compiler.use_ptq(ptq_options)
+```
+
+#### 2.2.5 Compiler
+
+【描述】
+
+Compiler类, 用于编译神经网络模型
+
+【定义】
+
+```python
+class Compiler:
+ _target: _nncase.Target
+ _session: _nncase.CompileSession
+ _compiler: _nncase.Compiler
+ _compile_options: _nncase.CompileOptions
+ _quantize_options: _nncase.QuantizeOptions
+ _module: IRModule
+```
+
+#### 2.2.6 import_tflite
+
+【描述】
+
+导入tflite模型
+
+【定义】
+
+```python
+def import_tflite(self, model_content: bytes, options: ImportOptions) -> None:
+ self._compile_options.input_format = "tflite"
+ self._import_module(model_content)
+```
+
+【参数】
+
+| 名称 | 类型 | 描述 |
+| -------------- | ------------- | -------------- |
+| model_content | byte\[\] | 读取的模型内容 |
+| import_options | ImportOptions | 导入选项 |
+
+【返回值】
+
+无
+
+【示例】
+
+```python
+model_content = read_model_file(model)
+compiler.import_tflite(model_content, import_options)
+```
+
+#### 2.2.7 import_onnx
+
+【描述】
+
+导入onnx模型
+
+【定义】
+
+```python
+def import_onnx(self, model_content: bytes, options: ImportOptions) -> None:
+ self._compile_options.input_format = "onnx"
+ self._import_module(model_content)
+```
+
+【参数】
+
+| 名称 | 类型 | 描述 |
+| -------------- | ------------- | -------------- |
+| model_content | byte\[\] | 读取的模型内容 |
+| import_options | ImportOptions | 导入选项 |
+
+【返回值】
+
+无
+
+【示例】
+
+```python
+model_content = read_model_file(model)
+compiler.import_onnx(model_content, import_options)
+```
+
+#### 2.2.8 use_ptq
+
+【描述】
+
+设置PTQ配置选项.
+
+- K230默认必须使用量化。
+
+【定义】
+
+`use_ptq(ptq_options)`
+
+【参数】
+
+| 名称 | 类型 | 描述 |
+| ----------- | ---------------- | ----------- |
+| ptq_options | PTQTensorOptions | PTQ配置选项 |
+
+【返回值】
+
+无
+
+【示例】
+
+`compiler.use_ptq(ptq_options)`
+
+#### 2.2.9 compile
+
+【描述】
+
+编译神经网络模型
+
+【定义】
+
+`compile()`
+
+【参数】
+
+无
+
+【返回值】
+
+无
+
+【示例】
+
+`compiler.compile()`
+
+#### 2.2.10 gencode_tobytes
+
+【描述】
+
+生成kmodel字节流
+
+【定义】
+
+`gencode_tobytes()`
+
+【参数】
+
+无
+
+【返回值】
+
+`bytes[]`
+
+【示例】
+
+```python
+kmodel = compiler.gencode_tobytes()
+with open(os.path.join(infer_dir, 'test.kmodel'), 'wb') as f:
+ f.write(kmodel)
+```
+
+### 2.3 示例
+
+下面示例中使用到的模型和python编译脚本
+
+- 原始模型文件位于/path/to/k230_sdk/src/big/nncase/examples/models目录
+- python编译脚本位于/path/to/k230_sdk/src/big/nncase/examples/scripts目录
+
+#### 2.3.1 编译tflite模型
+
+mbv2_tflite.py脚本如下
+
+```python
+import os
+import argparse
+import numpy as np
+from PIL import Image
+import nncase
+
+def read_model_file(model_file):
+ with open(model_file, 'rb') as f:
+ model_content = f.read()
+ return model_content
+
+def generate_data(shape, batch, calib_dir):
+ img_paths = [os.path.join(calib_dir, p) for p in os.listdir(calib_dir)]
+ data = []
+ for i in range(batch):
+ assert i < len(img_paths), "calibration images not enough."
+ img_data = Image.open(img_paths[i]).convert('RGB')
+ img_data = img_data.resize((shape[3], shape[2]), Image.BILINEAR)
+ img_data = np.asarray(img_data, dtype=np.uint8)
+ img_data = np.transpose(img_data, (2, 0, 1))
+ data.append([img_data[np.newaxis, ...]])
+ return data
+
+def main():
+ parser = argparse.ArgumentParser(prog="nncase")
+ parser.add_argument("--target", type=str, help='target to run')
+ parser.add_argument("--model", type=str, help='model file')
+ parser.add_argument("--dataset", type=str, help='calibration_dataset')
+ args = parser.parse_args()
+
+ input_shape = [1, 3, 224, 224]
+ dump_dir = 'tmp/mbv2_tflite'
+
+ # compile_options
+ compile_options = nncase.CompileOptions()
+ compile_options.target = args.target
+ compile_options.preprocess = True
+ compile_options.swapRB = False
+ compile_options.input_shape = input_shape
+ compile_options.input_type = 'uint8'
+ compile_options.input_range = [0, 255]
+ compile_options.mean = [127.5, 127.5, 127.5]
+ compile_options.std = [127.5, 127.5, 127.5]
+ compile_options.input_layout = 'NCHW'
+ compile_options.dump_ir = True
+ compile_options.dump_asm = True
+ compile_options.dump_dir = dump_dir
+
+ # compiler
+ compiler = nncase.Compiler(compile_options)
+
+ # import
+ model_content = read_model_file(args.model)
+ import_options = nncase.ImportOptions()
+ compiler.import_tflite(model_content, import_options)
+
+ # ptq_options
+ ptq_options = nncase.PTQTensorOptions()
+ ptq_options.samples_count = 6
+ ptq_options.set_tensor_data(generate_data(input_shape, ptq_options.samples_count, args.dataset))
+ compiler.use_ptq(ptq_options)
+
+ # compile
+ compiler.compile()
+
+ # kmodel
+ kmodel = compiler.gencode_tobytes()
+ with open(os.path.join(dump_dir, 'test.kmodel'), 'wb') as f:
+ f.write(kmodel)
+
+if __name__ == '__main__':
+ main()
+```
+
+执行如下命令即可编译mobilenetv2的tflite模型, target为k230
+
+```sh
+root@c285a41a7243:/mnt/# cd src/big/nncase/examples
+root@c285a41a7243:/mnt/src/big/nncase/examples# python3 ./scripts/mbv2_tflite.py --target k230 --model models/mbv2.tflite --dataset calibration_dataset
+```
+
+#### 2.3.2 编译onnx模型
+
+针对onnx模型, 建议先使用[ONNX Simplifier](https://github.com/daquexian/onnx-simplifier)进行简化, 然后再使用nncase编译.
+
+yolov5s_onnx.py 脚本如下
+
+```python
+import os
+import argparse
+import numpy as np
+from PIL import Image
+import onnxsim
+import onnx
+import nncase
+
+def parse_model_input_output(model_file):
+ onnx_model = onnx.load(model_file)
+ input_all = [node.name for node in onnx_model.graph.input]
+ input_initializer = [node.name for node in onnx_model.graph.initializer]
+ input_names = list(set(input_all) - set(input_initializer))
+ input_tensors = [
+ node for node in onnx_model.graph.input if node.name in input_names]
+
+ # input
+ inputs = []
+ for _, e in enumerate(input_tensors):
+ onnx_type = e.type.tensor_type
+ input_dict = {}
+ input_dict['name'] = e.name
+ input_dict['dtype'] = onnx.mapping.TENSOR_TYPE_TO_NP_TYPE[onnx_type.elem_type]
+ input_dict['shape'] = [(i.dim_value if i.dim_value != 0 else d) for i, d in zip(
+ onnx_type.shape.dim, [1, 3, 224, 224])]
+ inputs.append(input_dict)
+
+ return onnx_model, inputs
+
+
+def onnx_simplify(model_file, dump_dir):
+ onnx_model, inputs = parse_model_input_output(model_file)
+ onnx_model = onnx.shape_inference.infer_shapes(onnx_model)
+ input_shapes = {}
+ for input in inputs:
+ input_shapes[input['name']] = input['shape']
+
+ onnx_model, check = onnxsim.simplify(onnx_model, input_shapes=input_shapes)
+ assert check, "Simplified ONNX model could not be validated"
+
+ model_file = os.path.join(dump_dir, 'simplified.onnx')
+ onnx.save_model(onnx_model, model_file)
+ return model_file
+
+
+def read_model_file(model_file):
+ with open(model_file, 'rb') as f:
+ model_content = f.read()
+ return model_content
+
+def generate_data_ramdom(shape, batch):
+ data = []
+ for i in range(batch):
+ data.append([np.random.randint(0, 256, shape).astype(np.uint8)])
+ return data
+
+
+def generate_data(shape, batch, calib_dir):
+ img_paths = [os.path.join(calib_dir, p) for p in os.listdir(calib_dir)]
+ data = []
+ for i in range(batch):
+ assert i < len(img_paths), "calibration images not enough."
+ img_data = Image.open(img_paths[i]).convert('RGB')
+ img_data = img_data.resize((shape[3], shape[2]), Image.BILINEAR)
+ img_data = np.asarray(img_data, dtype=np.uint8)
+ img_data = np.transpose(img_data, (2, 0, 1))
+ data.append([img_data[np.newaxis, ...]])
+ return data
+
+def main():
+ parser = argparse.ArgumentParser(prog="nncase")
+ parser.add_argument("--target", type=str, help='target to run')
+ parser.add_argument("--model", type=str, help='model file')
+ parser.add_argument("--dataset", type=str, help='calibration_dataset')
+
+ args = parser.parse_args()
+
+ input_shape = [1, 3, 320, 320]
+
+ dump_dir = 'tmp/yolov5s_onnx'
+ if not os.path.exists(dump_dir):
+ os.makedirs(dump_dir)
+
+ # onnx simplify
+ model_file = onnx_simplify(args.model, dump_dir)
+
+ # compile_options
+ compile_options = nncase.CompileOptions()
+ compile_options.target = args.target
+ compile_options.preprocess = True
+ compile_options.swapRB = False
+ compile_options.input_shape = input_shape
+ compile_options.input_type = 'uint8'
+ compile_options.input_range = [0, 255]
+ compile_options.mean = [0, 0, 0]
+ compile_options.std = [255, 255, 255]
+ compile_options.input_layout = 'NCHW'
+ compile_options.output_layout = 'NCHW'
+ compile_options.dump_ir = True
+ compile_options.dump_asm = True
+ compile_options.dump_dir = dump_dir
+
+ # compiler
+ compiler = nncase.Compiler(compile_options)
+
+ # import
+ model_content = read_model_file(model_file)
+ import_options = nncase.ImportOptions()
+ compiler.import_onnx(model_content, import_options)
+
+ # ptq_options
+ ptq_options = nncase.PTQTensorOptions()
+ ptq_options.samples_count = 6
+ ptq_options.set_tensor_data(generate_data(input_shape, ptq_options.samples_count, args.dataset))
+ compiler.use_ptq(ptq_options)
+
+ # compile
+ compiler.compile()
+
+ # kmodel
+ kmodel = compiler.gencode_tobytes()
+ with open(os.path.join(dump_dir, 'test.kmodel'), 'wb') as f:
+ f.write(kmodel)
+
+if __name__ == '__main__':
+ main()
+```
+
+执行如下命令即可编译onnx模型, target为k230
+
+```sh
+root@c285a41a7243:/mnt/# cd src/big/nncase/examples
+root@c285a41a7243: /mnt/src/big/nncase/examples # python3 ./scripts/yolov5s_onnx.py --target k230 --model models/yolov5s.onnx --dataset calibration_dataset
+```
+
+## 3. 模拟器APIs(Python)
+
+除了编译模型APIs, nncase还提供了推理模型的APIs, 在PC上可推理编译模型生成的kmodel, 用来验证nncase推理结果和相应深度学习框架的runtime的结果是否一致等.
+
+### 3.1 APIs
+
+#### 3.1.1 MemoryRange
+
+【描述】
+
+MemoryRange类, 用于表示内存范围
+
+【定义】
+
+```python
+py::class_(m, "MemoryRange")
+ .def_readwrite("location", &memory_range::memory_location)
+ .def_property(
+ "dtype", [](const memory_range &range) { return to_dtype(range.datatype); },
+ [](memory_range &range, py::object dtype) { range.datatype = from_dtype(py::dtype::from_args(dtype)); })
+ .def_readwrite("start", &memory_range::start)
+ .def_readwrite("size", &memory_range::size);
+```
+
+【属性】
+
+| 名称 | 类型 | 描述 |
+| -------- | -------------- | -------------------------------------------------------------------------- |
+| location | int | 内存位置, 0表示input, 1表示output, 2表示rdata, 3表示data, 4表示shared_data |
+| dtype | python数据类型 | 数据类型 |
+| start | int | 内存起始地址 |
+| Size | int | 内存大小 |
+
+【示例】
+
+`mr = nncase.MemoryRange()`
+
+#### 3.1.2 RuntimeTensor
+
+【描述】
+
+RuntimeTensor类, 用于表示运行时tensor
+
+【定义】
+
+```python
+py::class_(m, "RuntimeTensor")
+ .def_static("from_numpy", [](py::array arr) {
+ auto src_buffer = arr.request();
+ auto datatype = from_dtype(arr.dtype());
+ auto tensor = host_runtime_tensor::create(
+ datatype,
+ to_rt_shape(src_buffer.shape),
+ to_rt_strides(src_buffer.itemsize, src_buffer.strides),
+ gsl::make_span(reinterpret_cast(src_buffer.ptr), src_buffer.size * src_buffer.itemsize),
+ [=](gsl::byte *) { arr.dec_ref(); })
+ .unwrap_or_throw();
+ arr.inc_ref();
+ return tensor;
+ })
+ .def("copy_to", [](runtime_tensor &from, runtime_tensor &to) {
+ from.copy_to(to).unwrap_or_throw();
+ })
+ .def("to_numpy", [](runtime_tensor &tensor) {
+ auto host = tensor.as_host().unwrap_or_throw();
+ auto src_map = std::move(hrt::map(host, hrt::map_read).unwrap_or_throw());
+ auto src_buffer = src_map.buffer();
+ return py::array(
+ to_dtype(tensor.datatype()),
+ tensor.shape(),
+ to_py_strides(runtime::get_bytes(tensor.datatype()), tensor.strides()),
+ src_buffer.data());
+ })
+ .def_property_readonly("dtype", [](runtime_tensor &tensor) {
+ return to_dtype(tensor.datatype());
+ })
+ .def_property_readonly("shape", [](runtime_tensor &tensor) {
+ return to_py_shape(tensor.shape());
+ });
+```
+
+【属性】
+
+| 名称 | 类型 | 描述 |
+| ----- | -------------- | ---------------- |
+| dtype | python数据类型 | Tensor的数据类型 |
+| shape | list | tensor的形状 |
+
+#### 3.1.3 from_numpy
+
+【描述】
+
+从numpy.ndarray构造RuntimeTensor对象
+
+【定义】
+
+`from_numpy(py::array arr)`
+
+【参数】
+
+| 名称 | 类型 | 描述 |
+| ---- | ------------- | ----------------- |
+| Arr | numpy.ndarray | numpy.ndarray对象 |
+
+【返回值】
+
+RuntimeTensor
+
+【示例】
+
+`tensor = nncase.RuntimeTensor.from_numpy(self.inputs[i]['data'])`
+
+#### 3.1.4 copy_to
+
+【描述】
+
+拷贝RuntimeTensor
+
+【定义】
+
+`copy_to(RuntimeTensor to)`
+
+【参数】
+
+| 名称 | 类型 | 描述 |
+| ---- | ------------- | ----------------- |
+| to | RuntimeTensor | RuntimeTensor对象 |
+
+【返回值】
+
+无
+
+【示例】
+
+`sim.get_output_tensor(i).copy_to(to)`
+
+#### 3.1.5 to_numpy
+
+【描述】
+
+将RuntimeTensor转换为numpy.ndarray对象
+
+【定义】
+
+`to_numpy()`
+
+【参数】
+
+无
+
+【返回值】
+
+numpy.ndarray对象
+
+【示例】
+
+`arr = sim.get_output_tensor(i).to_numpy()`
+
+#### 3.1.6 Simulator
+
+【描述】
+
+Simulator类, 用于在PC上推理kmodel
+
+【定义】
+
+```python
+py::class_(m, "Simulator")
+ .def(py::init())
+ .def("load_model", [](interpreter &interp, gsl::span buffer) { interp.load_model(buffer).unwrap_or_throw(); })
+ .def_property_readonly("inputs_size", &interpreter::inputs_size)
+ .def_property_readonly("outputs_size", &interpreter::outputs_size)
+ .def("get_input_desc", &interpreter::input_desc)
+ .def("get_output_desc", &interpreter::output_desc)
+ .def("get_input_tensor", [](interpreter &interp, size_t index) { return interp.input_tensor(index).unwrap_or_throw(); })
+ .def("set_input_tensor", [](interpreter &interp, size_t index, runtime_tensor tensor) { return interp.input_tensor(index, tensor).unwrap_or_throw(); })
+ .def("get_output_tensor", [](interpreter &interp, size_t index) { return interp.output_tensor(index).unwrap_or_throw(); })
+ .def("set_output_tensor", [](interpreter &interp, size_t index, runtime_tensor tensor) { return interp.output_tensor(index, tensor).unwrap_or_throw(); })
+ .def("run", [](interpreter &interp) { interp.run().unwrap_or_throw(); });
+```
+
+【属性】
+
+| 名称 | 类型 | 描述 |
+| ------------ | ---- | -------- |
+| inputs_size | int | 输入个数 |
+| outputs_size | int | 输出个数 |
+
+【示例】
+
+`sim = nncase.Simulator()`
+
+#### 3.1.7 load_model
+
+【描述】
+
+加载kmodel
+
+【定义】
+
+`load_model(model_content)`
+
+【参数】
+
+| 名称 | 类型 | 描述 |
+| ------------- | ------ | ------------ |
+| model_content | byte\[\] | kmodel字节流 |
+
+【返回值】
+
+无
+
+【示例】
+
+`sim.load_model(kmodel)`
+
+#### 3.1.8 get_input_desc
+
+【描述】
+
+获取指定索引的输入的描述信息
+
+【定义】
+
+`get_input_desc(index)`
+
+【参数】
+
+| 名称 | 类型 | 描述 |
+| ----- | ---- | ---------- |
+| index | int | 输入的索引 |
+
+【返回值】
+
+MemoryRange
+
+【示例】
+
+`input_desc_0 = sim.get_input_desc(0)`
+
+#### 3.1.9 get_output_desc
+
+【描述】
+
+获取指定索引的输出的描述信息
+
+【定义】
+
+`get_output_desc(index)`
+
+【参数】
+
+| 名称 | 类型 | 描述 |
+| ----- | ---- | ---------- |
+| index | int | 输出的索引 |
+
+【返回值】
+
+MemoryRange
+
+【示例】
+
+`output_desc_0 = sim.get_output_desc(0)`
+
+#### 3.1.10 get_input_tensor
+
+【描述】
+
+获取指定索引的输入的RuntimeTensor
+
+【定义】
+
+`get_input_tensor(index)`
+
+【参数】
+
+| 名称 | 类型 | 描述 |
+| ----- | ---- | ---------------- |
+| index | int | 输入tensor的索引 |
+
+【返回值】
+
+RuntimeTensor
+
+【示例】
+
+`input_tensor_0 = sim.get_input_tensor(0)`
+
+#### 3.1.11 set_input_tensor
+
+【描述】
+
+设置指定索引的输入的RuntimeTensor
+
+【定义】
+
+`set_input_tensor(index, tensor)`
+
+【参数】
+
+| 名称 | 类型 | 描述 |
+| ------ | ------------- | ---------------- |
+| index | int | 输入tensor的索引 |
+| tensor | RuntimeTensor | 输入tensor |
+
+【返回值】
+
+无
+
+【示例】
+
+`sim.set_input_tensor(0, nncase.RuntimeTensor.from_numpy(self.inputs[0]['data']))`
+
+#### 3.1.12 get_output_tensor
+
+【描述】
+
+获取指定索引的输出的RuntimeTensor
+
+【定义】
+
+`get_output_tensor(index)`
+
+【参数】
+
+| 名称 | 类型 | 描述 |
+| ----- | ---- | ---------------- |
+| index | int | 输出tensor的索引 |
+
+【返回值】
+
+RuntimeTensor
+
+【示例】
+
+`output_arr_0 = sim.get_output_tensor(0).to_numpy()`
+
+#### 3.1.13 set_output_tensor
+
+【描述】
+
+设置指定索引的输出的RuntimeTensor
+
+【定义】
+
+`set_output_tensor(index, tensor)`
+
+【参数】
+
+| 名称 | 类型 | 描述 |
+| ------ | ------------- | ---------------- |
+| index | int | 输出tensor的索引 |
+| tensor | RuntimeTensor | 输出tensor |
+
+【返回值】
+
+无
+
+【示例】
+
+`sim.set_output_tensor(0, tensor)`
+
+#### 3.1.14 run
+
+【描述】
+
+运行kmodel推理
+
+【定义】
+
+`run()`
+
+【参数】
+
+无
+
+【返回值】
+
+无
+
+【示例】
+
+`sim.run()`
+
+### 3.2 示例
+
+**前置条件**: yolov5s_onnx.py脚本已编译过yolov5s.onnx模型
+
+yolov5s_onnx_simu.py位于/path/to/k230_sdk/src/big/nncase/examples/scripts子目录, 内容如下
+
+```python
+import os
+import copy
+import argparse
+import numpy as np
+import onnx
+import onnxruntime as ort
+import nncase
+
+def read_model_file(model_file):
+ with open(model_file, 'rb') as f:
+ model_content = f.read()
+ return model_content
+
+def cosine(gt, pred):
+ return (gt @ pred) / (np.linalg.norm(gt, 2) * np.linalg.norm(pred, 2))
+
+def main():
+ parser = argparse.ArgumentParser(prog="nncase")
+ parser.add_argument("--model", type=str, help='original model file')
+ parser.add_argument("--model_input", type=str, help='input bin file for original model')
+ parser.add_argument("--kmodel", type=str, help='kmodel file')
+ parser.add_argument("--kmodel_input", type=str, help='input bin file for kmodel')
+ args = parser.parse_args()
+
+ # cpu inference
+ ort_session = ort.InferenceSession(args.model)
+ output_names = []
+ model_outputs = ort_session.get_outputs()
+ for i in range(len(model_outputs)):
+ output_names.append(model_outputs[i].name)
+ model_input = ort_session.get_inputs()[0]
+ model_input_name = model_input.name
+ model_input_type = np.float32
+ model_input_shape = model_input.shape
+ model_input_data = np.fromfile(args.model_input, model_input_type).reshape(model_input_shape)
+ cpu_results = []
+ cpu_results = ort_session.run(output_names, { model_input_name : model_input_data })
+
+ # create simulator
+ sim = nncase.Simulator()
+
+ # read kmodel
+ kmodel = read_model_file(args.kmodel)
+
+ # load kmodel
+ sim.load_model(kmodel)
+
+ # read input.bin
+ # input_tensor=sim.get_input_tensor(0).to_numpy()
+ dtype = sim.get_input_desc(0).dtype
+ input = np.fromfile(args.kmodel_input, dtype).reshape([1, 3, 320, 320])
+
+ # set input for simulator
+ sim.set_input_tensor(0, nncase.RuntimeTensor.from_numpy(input))
+
+ # simulator inference
+ nncase_results = []
+ sim.run()
+ for i in range(sim.outputs_size):
+ nncase_result = sim.get_output_tensor(i).to_numpy()
+ nncase_results.append(copy.deepcopy(nncase_result))
+
+ # compare
+ for i in range(sim.outputs_size):
+ cos = cosine(np.reshape(nncase_results[i], (-1)), np.reshape(cpu_results[i], (-1)))
+ print('output {0} cosine similarity : {1}'.format(i, cos))
+
+if __name__ == '__main__':
+ main()
+```
+
+执行推理脚本
+
+```shell
+root@5f718e19f8a7:/mnt/# cd src/big/nncase/examples
+root@5f718e19f8a7:/mnt/src/big/nncase/examples # export PATH=$PATH:/usr/local/lib/python3.8/dist-packages/
+root@5f718e19f8a7:/mnt/src/big/nncase/examples # python3 scripts/yolov5s_onnx_simu.py --model models/yolov5s.onnx --model_input object_detect/data/input_fp32.bin --kmodel tmp/yolov5s_onnx/test.kmodel --kmodel_input object_detect/data/input_uint8.bin
+```
+
+nncase simulator和cpu推理结果对比如下
+
+```sh
+output 0 cosine similarity : 0.9997244477272034
+output 1 cosine similarity : 0.999757707118988
+output 2 cosine similarity : 0.9997308850288391
+```
+
+## 4. KPU运行时APIs(C++)
+
+### 4.1 简介
+
+KPU运行时APIs用于在AI设备加载kmodel,设置输入数据,执行kpu/cpu计算, 获取输出数据等.
+
+目前只提供C++ APIs, 相关的头文件和静态库在/path/to/k230_sdk/src/big/nncase/riscv64目录下.
+
+```shell
+$ tree -L 3 riscv64/
+riscv64/
+├── gsl
+│ └── gsl-lite.hpp
+├── nncase
+│ ├── include
+│ │ └── nncase
+│ └── lib
+│ ├── cmake
+│ ├── libfunctional_k230.a
+│ ├── libnncase.rt_modules.k230.a
+│ └── libNncase.Runtime.Native.a
+└── rvvlib
+ ├── include
+ │ ├── k230_math.h
+ │ ├── nms.h
+ │ └── rvv_math.h
+ └── librvv.a
+
+8 directories, 8 files
+```
+
+### 4.2 APIs
+
+#### 4.2.1 hrt::create
+
+【描述】
+
+创建runtime_tensor
+
+【定义】
+
+```cpp
+(1) NNCASE_API result create(typecode_t datatype, dims_t shape, memory_pool_t pool = pool_shared_first) noexcept;
+(2) NNCASE_API result create(typecode_t datatype, dims_t shape, gsl::span data, bool copy,
+ memory_pool_t pool = pool_shared_first) noexcept;
+(3)NNCASE_API resultcreate(typecode_t datatype, dims_t shape, strides_t strides, gsl::span data, bool copy, memory_pool_t pool = pool_shared_first, uintptr_t physical_address = 0) noexcept;
+```
+
+【参数】
+
+| 名称 | 类型 | 描述 |
+| ---------------- | ---------------------- | ------------------------------------- |
+| datatype | typecode_t | 数据类型, 如dt_float32, dt_uint8等 |
+| shape | dims_t | tensor的形状 |
+| data | gsl::span\ | 用户态数据buffer |
+| copy | bool | 是否拷贝 |
+| pool | memory_pool_t | 内存池类型, 默认值为pool_shared_first |
+| physical_address | uintptr_t | 用户指定buffer的物理地址 |
+
+【返回值】
+
+`result`
+
+【示例】
+
+```cpp
+// create input tensor
+auto input_desc = interp.input_desc(0);
+auto input_shape = interp.input_shape(0);
+auto input_tensor = host_runtime_tensor::create(input_desc.datatype, input_shape, hrt::pool_shared).expect("cannot create input tensor");
+```
+
+#### 4.2.2 hrt::sync
+
+【描述】
+
+同步tensor的cache。
+
+- 对用户的输入数据, 需要调用 此接口的sync_write_back确保数据已刷入ddr.
+- 对gnne/ai2d计算后输出数据,默认gnne/ai2d runtime已做了sync_invalidate处理。
+
+【定义】
+
+`NNCASE_API result sync(runtime_tensor &tensor, sync_op_t op, bool force = false) noexcept;`
+
+【参数】
+
+| 名称 | 类型 | 描述 |
+| ------ | -------------- | ------------------------------------------------------------ |
+| tensor | runtime_tensor | 要操作的tensor |
+| op | sync_op_t | sync_invalidate(将tensor的cache invalidate)或sync_write_back(将tensor的cache写入ddr) |
+| force | bool | 是否强制执行 |
+
+【返回值】
+
+`result`
+
+【示例】
+
+```cpp
+hrt::sync(input_tensor, sync_op_t::sync_write_back, true).expect("sync write_back failed");
+```
+
+#### 4.2.3 interpreter::load_model
+
+【描述】
+
+加载kmodel模型
+
+【定义】
+
+`NNCASE_NODISCARD result load_model(gsl::span buffer) noexcept;`
+
+【参数】
+
+| 名称 | 类型 | 描述 |
+| ------ | ----------------------------- | ------------- |
+| buffer | gsl::span \ | kmodel buffer |
+
+【返回值】
+
+`result`
+
+【示例】
+
+```cpp
+interpreter interp;
+auto model = read_binary_file(kmodel);
+interp.load_model({(const gsl::byte *)model.data(), model.size()}).expect("cannot load model.");
+```
+
+#### 4.2.4 interpreter::inputs_size
+
+【描述】
+
+获取模型输入的个数
+
+【定义】
+
+`size_t inputs_size() const noexcept;`
+
+【参数】
+
+无
+
+【返回值】
+
+`size_t`
+
+【示例】
+
+`auto inputs_size = interp.inputs_size();`
+
+#### 4.2.5 interpreter::outputs_size
+
+【描述】
+
+获取模型输出的个数
+
+【定义】
+
+`size_t outputs_size() const noexcept;`
+
+【参数】
+
+无
+
+【返回值】
+
+`size_t`
+
+【示例】
+
+`auto outputs_size = interp.outputs_size();`
+
+#### 4.2.6 interpreter:: input_shape
+
+【描述】
+
+获取模型指定输入的形状
+
+【定义】
+
+`const runtime_shape_t &input_shape(size_t index) const noexcept;`
+
+【参数】
+
+| 名称 | 类型 | 描述 |
+| ----- | ------ | ---------- |
+| index | size_t | 输入的索引 |
+
+【返回值】
+
+`runtime_shape_t`
+
+【示例】
+
+`auto shape = interp.input_shape(0);`
+
+#### 4.2.7 interpreter:: output_shape
+
+【描述】
+
+获取模型指定输出的形状
+
+【定义】
+
+`const runtime_shape_t &output_shape(size_t index) const noexcept;`
+
+【参数】
+
+| 名称 | 类型 | 描述 |
+| ----- | ------ | ---------- |
+| index | size_t | 输出的索引 |
+
+【返回值】
+
+`runtime_shape_t`
+
+【示例】
+
+`auto shape = interp.output_shape(0);`
+
+#### 4.2.8 interpreter:: input_tensor
+
+【描述】
+
+获取/设置指定索引的输入 tensor
+
+【定义】
+
+```cpp
+(1) result input_tensor(size_t index) noexcept;
+(2) result input_tensor(size_t index, runtime_tensor tensor) noexcept;
+```
+
+【参数】
+
+| 名称 | 类型 | 描述 |
+| ------ | -------------- | ------------------------ |
+| index | size_t | 输入的索引 |
+| tensor | runtime_tensor | 输入对应的runtime tensor |
+
+【返回值】
+
+```cpp
+(1) result
+(2) result
+```cpp
+
+【示例】
+
+```cpp
+// set input
+interp.input_tensor(0, input_tensor).expect("cannot set input tensor");
+```
+
+#### 4.2.9 interpreter:: output_tensor
+
+【描述】
+
+获取/设置指定索引的输出tensor
+
+【定义】
+
+```cpp
+(1) result output_tensor(size_t index) noexcept;
+(2) result output_tensor(size_t index, runtime_tensor tensor) noexcept;
+```
+
+【参数】
+
+| 名称 | 类型 | 描述 |
+| ------ | -------------- | ------------------------ |
+| index | size_t | 输出的索引 |
+| tensor | runtime_tensor | 输出对应的runtime tensor |
+
+【返回值】
+
+```cpp
+(1) result
+(2) result
+```
+
+【示例】
+
+```cpp
+// get output
+auto output_tensor = interp.output_tensor(0).expect("cannot get output tensor");
+```
+
+#### 4.2.10 interpreter:: run
+
+【描述】
+
+执行kpu计算
+
+【定义】
+
+`result run() noexcept;`
+
+【参数】
+
+无
+
+【返回值】
+
+返回result \
+
+【示例】
+
+```cpp
+// run
+interp.run().expect("error occurred in running model");
+```
+
+### 4.3 示例
+
+```cpp
+#include
+#include
+#include
+#include
+#include
+
+#define USE_OPENCV 1
+#define preprocess 1
+
+#if USE_OPENCV
+#include
+#include
+#include
+#endif
+
+using namespace nncase;
+using namespace nncase::runtime;
+using namespace nncase::runtime::detail;
+
+#define INTPUT_HEIGHT 224
+#define INTPUT_WIDTH 224
+#define INTPUT_CHANNELS 3
+
+template
+std::vector read_binary_file(const std::string &file_name)
+{
+ std::ifstream ifs(file_name, std::ios::binary);
+ ifs.seekg(0, ifs.end);
+ size_t len = ifs.tellg();
+ std::vector vec(len / sizeof(T), 0);
+ ifs.seekg(0, ifs.beg);
+ ifs.read(reinterpret_cast(vec.data()), len);
+ ifs.close();
+ return vec;
+}
+
+void read_binary_file(const char *file_name, char *buffer)
+{
+ std::ifstream ifs(file_name, std::ios::binary);
+ ifs.seekg(0, ifs.end);
+ size_t len = ifs.tellg();
+ ifs.seekg(0, ifs.beg);
+ ifs.read(buffer, len);
+ ifs.close();
+}
+
+static std::vector read_txt_file(const char *file_name)
+{
+ std::vector vec;
+ vec.reserve(1024);
+
+ std::ifstream fp(file_name);
+ std::string label;
+
+ while (getline(fp, label))
+ {
+ vec.push_back(label);
+ }
+
+ return vec;
+}
+
+template
+static int softmax(const T* src, T* dst, int length)
+{
+ const T alpha = *std::max_element(src, src + length);
+ T denominator{ 0 };
+
+ for (int i = 0; i < length; ++i) {
+ dst[i] = std::exp(src[i] - alpha);
+ denominator += dst[i];
+ }
+
+ for (int i = 0; i < length; ++i) {
+ dst[i] /= denominator;
+ }
+
+ return 0;
+}
+
+#if USE_OPENCV
+std::vector hwc2chw(cv::Mat &img)
+{
+ std::vector vec;
+ std::vector rgbChannels(3);
+ cv::split(img, rgbChannels);
+ for (auto i = 0; i < rgbChannels.size(); i++)
+ {
+ std::vector data = std::vector(rgbChannels[i].reshape(1, 1));
+ vec.insert(vec.end(), data.begin(), data.end());
+ }
+
+ return vec;
+}
+#endif
+
+static int inference(const char *kmodel_file, const char *image_file, const char *label_file)
+{
+ // load kmodel
+ interpreter interp;
+ auto kmodel = read_binary_file(kmodel_file);
+ interp.load_model({ (const gsl::byte *)kmodel.data(), kmodel.size() }).expect("cannot load model.");
+
+ // create input tensor
+ auto input_desc = interp.input_desc(0);
+ auto input_shape = interp.input_shape(0);
+ auto input_tensor = host_runtime_tensor::create(input_desc.datatype, input_shape, hrt::pool_shared).expect("cannot create input tensor");
+ interp.input_tensor(0, input_tensor).expect("cannot set input tensor");
+
+ // create output tensor
+ // auto output_desc = interp.output_desc(0);
+ // auto output_shape = interp.output_shape(0);
+ // auto output_tensor = host_runtime_tensor::create(output_desc.datatype, output_shape, hrt::pool_shared).expect("cannot create output tensor");
+ // interp.output_tensor(0, output_tensor).expect("cannot set output tensor");
+
+ // set input data
+ auto dst = input_tensor.impl()->to_host().unwrap()->buffer().as_host().unwrap().map(map_access_::map_write).unwrap().buffer();
+#if USE_OPENCV
+ cv::Mat img = cv::imread(image_file);
+ cv::resize(img, img, cv::Size(INTPUT_WIDTH, INTPUT_HEIGHT), cv::INTER_NEAREST);
+ auto input_vec = hwc2chw(img);
+ memcpy(reinterpret_cast(dst.data()), input_vec.data(), input_vec.size());
+#else
+ read_binary_file(image_file, reinterpret_cast(dst.data()));
+#endif
+ hrt::sync(input_tensor, sync_op_t::sync_write_back, true).expect("sync write_back failed");
+
+ // run
+ size_t counter = 1;
+ auto start = std::chrono::steady_clock::now();
+ for (size_t c = 0; c < counter; c++)
+ {
+ interp.run().expect("error occurred in running model");
+ }
+ auto stop = std::chrono::steady_clock::now();
+ double duration = std::chrono::duration(stop - start).count();
+ std::cout << "interp.run() took: " << duration / counter << " ms" << std::endl;
+
+ // get output data
+ auto output_tensor = interp.output_tensor(0).expect("cannot set output tensor");
+ dst = output_tensor.impl()->to_host().unwrap()->buffer().as_host().unwrap().map(map_access_::map_read).unwrap().buffer();
+ float *output_data = reinterpret_cast(dst.data());
+ auto out_shape = interp.output_shape(0);
+ auto size = compute_size(out_shape);
+
+ // postprogress softmax by cpu
+ std::vector softmax_vec(size, 0);
+ auto buf = softmax_vec.data();
+ softmax(output_data, buf, size);
+ auto it = std::max_element(buf, buf + size);
+ size_t idx = it - buf;
+
+ // load label
+ auto labels = read_txt_file(label_file);
+ std::cout << "image classify result: " << labels[idx] << "(" << *it << ")" << std::endl;
+
+ return 0;
+}
+
+int main(int argc, char *argv[])
+{
+ std::cout << "case " << argv[0] << " built at " << __DATE__ << " " << __TIME__ << std::endl;
+ if (argc != 4)
+ {
+ std::cerr << "Usage: " << argv[0] << " " << std::endl;
+ return -1;
+ }
+
+ int ret = inference(argv[1], argv[2], argv[3]);
+ if (ret)
+ {
+ std::cerr << "inference failed: ret = " << ret << std::endl;
+ return -2;
+ }
+
+ return 0;
+}
+```
+
+## 5. AI2D 运行时APIs(C++)
+
+### 5.1 简介
+
+AI2D运行时APIs用于在AI设备配置AI2D的参数,生成相关寄存器配置,执行AI2D计算等.
+
+#### 5.1.1 支持的格式转换
+
+| 输入格式 | 输出格式 | 备注 |
+| ---------------- | ---------------------- | --------------------- |
+| YUV420_NV12 | RGB_planar/YUV420_NV12 | |
+| YUV420_NV21 | RGB_planar/YUV420_NV21 | |
+| YUV420_I420 | RGB_planar/YUV420_I420 | |
+| YUV400 | YUV400 | |
+| NCHW(RGB_planar) | NCHW(RGB_planar) | |
+| RGB_packed | RGB_planar/RGB_packed | |
+| RAW16 | RAW16/8 | 深度图,执行shift操作 |
+
+#### 5.1.2 功能描述
+
+| 功能 | 描述 | 备注 |
+| ------------------- | --------------------------------------------------------------------------------------------------------------- | ----------------- |
+| 仿射变换 | 支持输入格式YUV420、YUV400、RGB(planar/packed) 支持深度图RAW16格式 支持输出格式YUV400、RGB、深度图 | |
+| Crop/Resize/Padding | 支持输入YUV420、YUV400、RGB 支持深度图RAW16格式 Resize支持中间NCHW的排列格式 支持输出格式YUV420、YUV400、RGB | 只支持padding常数 |
+| Shift | 支持输入格式Raw16 支持输出格式Raw8 | |
+| 符号位 | 支持有符号和无符号输入 | |
+
+### 5.2 APIs
+
+#### 5.2.1 ai2d_format
+
+【描述】
+
+ai2d_format用于配置输入输出的可选数据格式.
+
+【定义】
+
+```cpp
+enum class ai2d_format
+{
+ YUV420_NV12 = 0,
+ YUV420_NV21 = 1,
+ YUV420_I420 = 2,
+ NCHW_FMT = 3,
+ RGB_packed = 4,
+ RAW16 = 5,
+}
+```
+
+#### 5.2.2 ai2d_interp_method
+
+【描述】
+
+ai2d_interp_method用于配置可选的插值方式.
+
+【定义】
+
+```cpp
+ enum class ai2d_interp_method
+{
+ tf_nearest = 0,
+ tf_bilinear = 1,
+ cv2_nearest = 2,
+ cv2_bilinear = 3,
+}
+```
+
+#### 5.2.3 ai2d_interp_mode
+
+【描述】
+
+ai2d_interp_mode 用于配置可选的插值模式.
+
+【定义】
+
+```cpp
+enum class ai2d_interp_mode
+{
+ none = 0,
+ align_corner = 1,
+ half_pixel = 2,
+}
+```
+
+#### 5.2.4 ai2d_pad_mode
+
+【描述】
+
+ai2d_pad_mode用于配置可选的padding模式, 目前只支持常数padding.
+
+【定义】
+
+```cpp
+enum class ai2d_pad_mode
+{
+ constant = 0,
+ copy = 1,
+ mirror = 2,
+}
+```
+
+#### 5.2.5 ai2d_datatype_t
+
+【描述】
+
+ai2d_datatype_t 用于设置AI2D计算过程中的数据类型.
+
+【定义】
+
+```cpp
+struct ai2d_datatype_t
+{
+ ai2d_format src_format;
+ ai2d_format dst_format;
+ datatype_t src_type;
+ datatype_t dst_type;
+ ai2d_data_loc src_loc = ai2d_data_loc::ddr;
+ ai2d_data_loc dst_loc = ai2d_data_loc::ddr;
+}
+```
+
+【参数】
+
+| 名称 | 类型 | 描述 |
+| ---------- | ------------- | --------------------- |
+| src_format | ai2d_format | 输入数据格式 |
+| dst_format | ai2d_format | 输出数据格式 |
+| src_type | datatype_t | 输入数据类型 |
+| dst_type | datatype_t | 输出数据类型 |
+| src_loc | ai2d_data_loc | 输入数据位置,默认ddr |
+| dst_loc | ai2d_data_loc | 输出数据位置,默认ddr |
+
+【示例】
+
+```cpp
+ai2d_datatype_t ai2d_dtype { ai2d_format::RAW16, ai2d_format::NCHW_FMT, datatype_t::dt_uint16, datatype_t::dt_uint8 };
+```
+
+#### 5.2.6 ai2d_crop_param_t
+
+【描述】
+
+ai2d_crop_param_t用于配置crop相关的参数.
+
+【定义】
+
+```cpp
+struct ai2d_crop_param_t
+{
+ bool crop_flag = false;
+ int32_t start_x = 0;
+ int32_t start_y = 0;
+ int32_t width = 0;
+ int32_t height = 0;
+}
+```
+
+【参数】
+
+| 名称 | 类型 | 描述 |
+| --------- | ---- | ------------------ |
+| crop_flag | bool | 是否开启crop功能 |
+| start_x | int | 宽度方向的起始像素 |
+| start_y | int | 高度方向的起始像素 |
+| width | int | 宽度方向的crop长度 |
+| height | int | 高度方向的crop长度 |
+
+【示例】
+
+```cpp
+ai2d_crop_param_t crop_param { true, 40, 30, 400, 600 };
+```
+
+#### 5.2.7 ai2d_shift_param_t
+
+【描述】
+
+ai2d_shift_param_t用于配置shift相关的参数.
+
+【定义】
+
+```cpp
+struct ai2d_shift_param_t
+{
+ bool shift_flag = false;
+ int32_t shift_val = 0;
+}
+```
+
+【参数】
+
+| 名称 | 类型 | 描述 |
+| ---------- | ---- | ----------------- |
+| shift_flag | bool | 是否开启shift功能 |
+| shift_val | int | 右移的比特数 |
+
+【示例】
+
+`ai2d_shift_param_t shift_param { true, 2 };`
+
+#### 5.2.8 ai2d_pad_param_t
+
+【描述】
+
+ai2d_pad_param_t 用于配置pad相关的参数.
+
+【定义】
+
+```cpp
+struct ai2d_pad_param_t
+{
+ bool pad_flag = false;
+ runtime_paddings_t paddings;
+ ai2d_pad_mode pad_mode = ai2d_pad_mode::constant;
+ std::vector pad_val; // by channel
+}
+```
+
+【参数】
+
+| 名称 | 类型 | 描述 |
+| -------- | ---------------------- | ----------------------------------------------------------------------------------------------------- |
+| pad_flag | bool | 是否开启pad功能 |
+| paddings | runtime_paddings_t | 各个维度的padding, shape=`[4, 2]`,分别表示dim0到dim4的前后padding的个数,其中dim0/dim1固定配置{0, 0} |
+| pad_mode | ai2d_pad_mode | padding模式,只支持constant padding |
+| pad_val | std::vector\ | 每个channel的padding value |
+
+【示例】
+
+```cpp
+ai2d_pad_param_t pad_param { false, { { 0, 0 }, { 0, 0 }, { 0, 0 }, { 60, 60 } }, ai2d_pad_mode::constant, { 255 } };
+```
+
+#### 5.2.9 ai2d_resize_param_t
+
+【描述】
+
+ai2d_resize_param_t 用于配置resize相关的参数.
+
+【定义】
+
+```cpp
+struct ai2d_resize_param_t
+{
+ bool resize_flag = false;
+ ai2d_interp_method interp_method = ai2d_interp_method::tf_bilinear;
+ ai2d_interp_mode interp_mode = ai2d_interp_mode::none;
+}
+```
+
+【参数】
+
+| 名称 | 类型 | 描述 |
+| ------------- | ------------------ | ------------------ |
+| resize_flag | bool | 是否开启resize功能 |
+| interp_method | ai2d_interp_method | resize插值方法 |
+| interp_mode | ai2d_interp_mode | resize模式 |
+
+【示例】
+
+```cpp
+ai2d_resize_param_t resize_param { true, ai2d_interp_method::tf_bilinear, ai2d_interp_mode::half_pixel };
+```
+
+#### 5.2.10 ai2d_affine_param_t
+
+【描述】
+
+ai2d_affine_param_t 用于配置affine相关的参数.
+
+【定义】
+
+```cpp
+struct ai2d_affine_param_t
+{
+ bool affine_flag = false;
+ ai2d_interp_method interp_method = ai2d_interp_method::cv2_bilinear;
+ uint32_t cord_round = 0;
+ uint32_t bound_ind = 0;
+ int32_t bound_val = 0;
+ uint32_t bound_smooth = 0;
+ std::vector M;
+}
+```
+
+【参数】
+
+| 名称 | 类型 | 描述 |
+| ------------- | -------------------- | ---------------------------------------------------------------------------------------------------------------------------- |
+| affine_flag | bool | 是否开启affine功能 |
+| interp_method | ai2d_interp_method | Affine采用的插值方法 |
+| cord_round | uint32_t | 整数边界0或者1 |
+| bound_ind | uint32_t | 边界像素模式0或者1 |
+| bound_val | uint32_t | 边界填充值 |
+| bound_smooth | uint32_t | 边界平滑0或者1 |
+| M | std::vector\ | 仿射变换矩阵对应的vector,仿射变换为$Y=\[a_0, a_1; a_2, a_3\] \cdot X + \[b_0, b_1\] $, 则 $ M=\{a_0,a_1,b_0,a_2,a_3,b_1\} $ |
+
+【示例】
+
+```cpp
+ai2d_affine_param_t affine_param { true, ai2d_interp_method::cv2_bilinear, 0, 0, 127, 1, { 0.5, 0.1, 0.0, 0.1, 0.5, 0.0 } };
+```
+
+#### 5.2.11 ai2d_builder:: ai2d_builder
+
+【描述】
+
+ai2d_builder的构造函数.
+
+【定义】
+
+```cpp
+ai2d_builder(dims_t &input_shape, dims_t &output_shape, ai2d_datatype_t ai2d_dtype, ai2d_crop_param_t crop_param, ai2d_shift_param_t shift_param, ai2d_pad_param_t pad_param, ai2d_resize_param_t resize_param, ai2d_affine_param_t affine_param);
+```
+
+【参数】
+
+| 名称 | 类型 | 描述 |
+| ------------ | ------------------- | -------------- |
+| input_shape | dims_t | 输入形状 |
+| output_shape | dims_t | 输出形状 |
+| ai2d_dtype | ai2d_datatype_t | ai2d数据类型 |
+| crop_param | ai2d_crop_param_t | crop相关参数 |
+| shift_param | ai2d_shift_param_t | shift相关参数 |
+| pad_param | ai2d_pad_param_t | pad相关参数 |
+| resize_param | ai2d_resize_param_t | resize相关参数 |
+| affine_param | ai2d_affine_param_t | affine相关参数 |
+
+【返回值 】
+
+无
+
+【示例】
+
+```cpp
+dims_t in_shape { 1, ai2d_input_c_, ai2d_input_h_, ai2d_input_w_ };
+auto out_span = ai2d_out_tensor_.shape();
+dims_t out_shape { out_span.begin(), out_span.end() };
+ai2d_datatype_t ai2d_dtype { ai2d_format::NCHW_FMT, ai2d_format::NCHW_FMT, typecode_t::dt_uint8, typecode_t::dt_uint8 };
+ai2d_crop_param_t crop_param { false, 0, 0, 0, 0 };
+ai2d_shift_param_t shift_param { false, 0 };
+ai2d_pad_param_t pad_param { true, { { 0, 0 }, { 0, 0 }, { 0, 0 }, { 70, 70 } }, ai2d_pad_mode::constant, { 0, 0, 0 } };
+ai2d_resize_param_t resize_param { true, ai2d_interp_method::tf_bilinear, ai2d_interp_mode::half_pixel };
+ai2d_affine_param_t affine_param { false };
+ai2d_builder_.reset(new ai2d_builder(in_shape, out_shape, ai2d_dtype, crop_param, shift_param, pad_param, resize_param, affine_param));
+```
+
+#### 5.2.12 ai2d_builder:: build_schedule
+
+【描述】
+
+生成AI2D计算需要的参数.
+
+【定义】
+
+```c++
+result build_schedule();
+```
+
+【参数】
+
+无
+
+【返回值】
+
+`result`
+
+【示例】
+
+```c++
+ai2d_builder_->build_schedule();
+```
+
+#### 5.2.13 ai2d_builder:: invoke
+
+【描述】
+
+配置寄存器并启动AI2D的计算.
+
+【定义】
+
+```c++
+result invoke(runtime_tensor &input, runtime_tensor &output);
+```
+
+【参数】
+
+| 名称 | 类型 | 描述 |
+| ------ | -------------- | ---------- |
+| input | runtime_tensor | 输入tensor |
+| output | runtime_tensor | 输出tensor |
+
+【返回值 】
+
+result\
+
+【示例】
+
+```c++
+// run ai2d
+ai2d_builder_->invoke(ai2d_in_tensor, ai2d_out_tensor_).expect("error occurred in ai2d running");
+```
+
+### 5.3 示例
+
+```cpp
+static void test_pad_mini_test(const char *gmodel_file, const char *expect_file)
+{
+ // input tensor
+ dims_t in_shape { 1, 100, 150, 3 };
+ auto in_tensor = host_runtime_tensor::create(dt_uint8, in_shape, hrt::pool_shared).expect("cannot create input tensor");
+ auto mapped_in_buf = std::move(hrt::map(in_tensor, map_access_t::map_write).unwrap());
+ read_binary_file(gmodel_file, reinterpret_cast(mapped_in_buf.buffer().data()));
+ mapped_in_buf.unmap().expect("unmap input tensor failed");
+ hrt::sync(in_tensor, sync_op_t::sync_write_back, true).expect("write back input failed");
+
+ // output tensor
+ dims_t out_shape { 1, 100, 160, 3 };
+ auto out_tensor = host_runtime_tensor::create(dt_uint8, out_shape, hrt::pool_shared).expect("cannot create output tensor");
+
+ // config ai2d
+ ai2d_datatype_t ai2d_dtype { ai2d_format::RGB_packed, ai2d_format::RGB_packed, dt_uint8, dt_uint8 };
+ ai2d_crop_param_t crop_param { false, 0, 0, 0, 0 };
+ ai2d_shift_param_t shift_param { false, 0 };
+ ai2d_pad_param_t pad_param { true, { { 0, 0 }, { 0, 0 }, { 0, 0 }, { 10, 0 } }, ai2d_pad_mode::constant, { 255, 10, 5 } };
+ ai2d_resize_param_t resize_param { false, ai2d_interp_method::tf_bilinear, ai2d_interp_mode::half_pixel };
+ ai2d_affine_param_t affine_param { false };
+
+ // run
+ ai2d_builder builder { in_shape, out_shape, ai2d_dtype, crop_param, shift_param, pad_param, resize_param, affine_param };
+ auto start = std::chrono::steady_clock::now();
+ builder.build_schedule().expect("error occurred in ai2d build_schedule");
+ builder.invoke(in_tensor, out_tensor).expect("error occurred in ai2d invoke");
+ auto stop = std::chrono::steady_clock::now();
+ double duration = std::chrono::duration(stop - start).count();
+ std::cout << "ai2d run: duration = " << duration << " ms, fps = " << 1000 / duration << std::endl;
+
+ // compare
+ auto mapped_out_buf = std::move(hrt::map(out_tensor, map_access_t::map_read).unwrap());
+ auto actual = mapped_out_buf.buffer().data();
+ auto expected = read_binary_file(expect_file);
+ int ret = memcmp(reinterpret_cast(actual), reinterpret_cast(expected.data()), expected.size());
+ if (!ret)
+ {
+ std::cout << "compare output succeed!" << std::endl;
+ }
+ else
+ {
+ auto cos = cosine(reinterpret_cast(actual), reinterpret_cast(expected.data()), expected.size());
+ std::cerr << "compare output failed: cosine similarity = " << cos << std::endl;
+ }
+}
+```
+
+### 5.4 注意事项
+
+1. Affine和Resize功能是互斥的,不能同时开启
+1. Shift功能的输入格式只能是Raw16
+1. Pad value是按通道配置的,对应的list元素个数要与channel数相等
+1. 当前版本中,当只需要AI2D的一个功能时,其他参数也需要配置,flag置为false即可,其他字段不用配置。
+1. 当配置了多个功能时,执行顺序是Crop->Shift->Resize/Affine->Pad, 配置参数时注意要匹配。
+
+## 6. FAQ
+
+### 6.1 安装wheel包时报错: `xxx.whl is not a supported wheel on this platform.`
+
+Q: 安装nncase wheel包, 出现ERROR: nncase-1.0.0.20210830-cp37-cp37m-manylinux_2_24_x86_64.whl is not a supported wheel on this platform.
+
+A: 升级 pip \>= 20.3
+
+```shell
+sudo pip install --upgrade pip
+```
+
+### 6.2 编译模型时报错`python: symbol lookup error`
+
+Q: 编译模型报错`python: symbol lookup error: /usr/local/lib/python3.8/dist-packages/libnncase.modules.k230.so: undefined symbol: \_ZN6nncase2ir5graph14split_subgraphESt4spanIKPNS0_4nodeELm18446744073709551615EEb`
+
+A: 查看nncase和nncase-k230 wheel包版本是否匹配
+
+```shell
+root@a829814d14b7:/mnt/examples# pip list
+Package Version
+------------ --------------
+gmssl 3.2.1
+nncase 1.8.0.20220929
+nncase-k230 1.9.0.20230403
+numpy 1.24.2
+Pillow 9.4.0
+pip 23.0
+pycryptodome 3.17
+setuptools 45.2.0
+wheel 0.34.2
+```
+
+### 6.3 上板运行App推理程序时报错`std::bad_alloc`
+
+Q: 上板运行App推理程序, 抛出`std::bad_alloc`异常
+
+```shell
+$ ./cpp.sh
+case ./yolov3_bfloat16 build at Sep 16 2021 18:12:03
+terminate called after throwing an instance of 'std::bad_alloc'
+ what(): std::bad_alloc
+```
+
+A: std::bad_alloc异常通常是因为内存分配失败导致的, 可做如下排查.
+
+- 检查生成的kmodel是否超过当前系统可用内存
+- 检查App是否存在内存泄露
+
+### 6.4 上板运行App推理程序时报错`data.size_bytes() == size = false (bool)`
+
+Q: 运行App推理程序, 抛出`[..t_runtime_tensor.cpp:310 (create)] data.size_bytes() == size = false (bool)`异常
+
+A: 检查设置的输入tensor信息, 重点是输入shape和每个元素占用的字节数(fp32/uint8)是否和模型一致
diff --git a/zh/01_software/board/ai/images/185762ac17039d6c4961faa2fba0d66e.png b/zh/01_software/board/ai/images/185762ac17039d6c4961faa2fba0d66e.png
new file mode 100644
index 0000000..7ad2ffc
Binary files /dev/null and b/zh/01_software/board/ai/images/185762ac17039d6c4961faa2fba0d66e.png differ
diff --git a/zh/01_software/board/ai/images/540e27e83677e9457077ad1d45bc1980.png b/zh/01_software/board/ai/images/540e27e83677e9457077ad1d45bc1980.png
new file mode 100644
index 0000000..7650af3
Binary files /dev/null and b/zh/01_software/board/ai/images/540e27e83677e9457077ad1d45bc1980.png differ
diff --git a/zh/01_software/board/ai/images/canaan-cover.png b/zh/01_software/board/ai/images/canaan-cover.png
new file mode 100644
index 0000000..0319765
Binary files /dev/null and b/zh/01_software/board/ai/images/canaan-cover.png differ
diff --git a/zh/01_software/board/ai/images/logo.png b/zh/01_software/board/ai/images/logo.png
new file mode 100644
index 0000000..aa48558
Binary files /dev/null and b/zh/01_software/board/ai/images/logo.png differ
diff --git "a/zh/01_software/board/cdk/K230_\346\240\270\351\227\264\351\200\232\350\256\257_API\345\217\202\350\200\203.md" "b/zh/01_software/board/cdk/K230_\346\240\270\351\227\264\351\200\232\350\256\257_API\345\217\202\350\200\203.md"
new file mode 100644
index 0000000..3aa2afd
--- /dev/null
+++ "b/zh/01_software/board/cdk/K230_\346\240\270\351\227\264\351\200\232\350\256\257_API\345\217\202\350\200\203.md"
@@ -0,0 +1,1445 @@
+# K230核间通讯API参考
+
+
+
+版权所有©2023北京嘉楠捷思信息技术有限公司
+
+
+
+## 免责声明
+
+您购买的产品、服务或特性等应受北京嘉楠捷思信息技术有限公司(“本公司”,下同)及其关联公司的商业合同和条款的约束,本文档中描述的全部或部分产品、服务或特性可能不在您的购买或使用范围之内。除非合同另有约定,本公司不对本文档的任何陈述、信息、内容的正确性、可靠性、完整性、适销性、符合特定目的和不侵权提供任何明示或默示的声明或保证。除非另有约定,本文档仅作为使用指导参考。
+
+由于产品版本升级或其他原因,本文档内容将可能在未经任何通知的情况下,不定期进行更新或修改。
+
+## 商标声明
+
+、“嘉楠”和其他嘉楠商标均为北京嘉楠捷思信息技术有限公司及其关联公司的商标。本文档可能提及的其他所有商标或注册商标,由各自的所有人拥有。
+
+**版权所有 © 2023北京嘉楠捷思信息技术有限公司。保留一切权利。**
+非经本公司书面许可,任何单位和个人不得擅自摘抄、复制本文档内容的部分或全部,并不得以任何形式传播。
+
+
+
+## 目录
+
+[TOC]
+
+## 前言
+
+### 概述
+
+本文档主要介绍媒体子系统中系统控制模块的功能和用法,其它模块的功能和用法将各有专门的文档加以论述。
+
+### 读者对象
+
+本文档(本指南)主要适用于以下人员:
+
+- 技术支持工程师
+- 软件开发工程师
+
+### 缩略词定义
+
+| 简称 | 说明 |
+|--------|------------------------------------------|
+| ipcm | internal processor communication module |
+| IPCMSG | internal processor communication message |
+
+### 修订记录
+
+| 文档版本号 | 修改说明 | 修改者 | 日期 |
+|------------|----------|--------|----------|
+| v1.0 | 初版 | 郝海波 | 2023/3/8 |
+
+## 1. 概述
+
+### 1.1 概述
+
+该文档描述了K230异构核间通讯的相关内容。
+
+#### 1.1.1 核间通讯实现原理
+
+
+
+- 共享内存用于大小核发送通信消息的具体内容
+- 共享内存管理用于标识通信消息的属性例如地址,大小,端口号等
+- Mailbox通过中断方式实现大小核发送消息后的通知机制
+
+#### 1.1.2 内存空间使用
+
+目前大小核使用的数据共享内存区域设计共1M空间,对于参与通讯的一方来说发送和接收各占512KB的空间大小。用于维护各个核状态的共享内存区域为4KB。
+
+### 1.2 功能描述
+
+#### 1.2.1 IPCMSG
+
+IPCMSG是K230大小核在用户态进行通讯的组件,主要用于发送控制类消息。该模块包括服务添加删除,消息创建删除,断开连接,发送消息等功能。支持三种消息发送方式,发送异步消息,发送同步消息,以及发送不需要对方回复的消息。其中同步消息支持超时机制,用户调用API时可自定义设置超时时间。需要得到回复的消息,在发出60秒之后才收到回复消息的话,该回复消息会被丢弃。
+
+#### 1.2.2 DATAFIFO
+
+DATAFIFO是K230大小核在用户态进行大量数据交互(例如编码数据)时,使用的核间通讯组件。内部主要使用共享内存来完成数据的交互,数据传递的是指针,不会拷贝数据的内容,数据的收发通知依靠线程轮训来实现。
+
+DATAFIFO 主要包含通路的打开、关闭、数据的写入和读出,以及其他控制命令
+
+## 2. API 参考
+
+### 2.1 IPCMSG
+
+该功能模块提供以下API:
+
+- [kd_ipcmsg_add_service](#211-kd_ipcmsg_add_service)
+- [kd_ipcmsg_del_service](#212-kd_ipcmsg_del_service)
+- [kd_ipcmsg_try_connect](#213-kd_ipcmsg_try_connect)
+- [kd_ipcmsg_connect](#214-kd_ipcmsg_connect)
+- [kd_ipcmsg_disconnect](#215-kd_ipcmsg_disconnect)
+- [kd_ipcmsg_is_connect](#216-kd_ipcmsg_is_connect)
+- [kd_ipcmsg_send_only](#217-kd_ipcmsg_send_only)
+- [kd_ipcmsg_send_async](#218-kd_ipcmsg_send_async)
+- [kd_ipcmsg_send_sync](#219-kd_ipcmsg_send_sync)
+- [kd_ipcmsg_run](#2110-kd_ipcmsg_run)
+- [kd_ipcmsg_create_message](#2111-kd_ipcmsg_create_message)
+- [kd_ipcmsg_create_resp_message](#2112-kd_ipcmsg_create_resp_message)
+- [kd_ipcmsg_destory_message](#2113-kd_ipcmsg_destroy_message)
+
+#### 2.1.1 kd_ipcmsg_add_service
+
+【描述】
+
+添加服务
+
+【语法】
+
+k_s32 kd_ipcmsg_add_service(const k_char\* pszServiceName, const [k_ipcmsg_connect_s](#314-k_ipcmsg_connect_s)* pstConnectAttr);
+
+【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+|-----------------|-------------------------------|-----------|
+| pszServiceName | 服务的名称指针。。 | 输入 |
+| pstConnectAttr | 连接对端服务器的属性结构体。 | 输入 |
+
+【返回值】
+
+| **返回值** | **描述** |
+|---------|---------------------------------|
+| 0 | 成功。 |
+| 非 0 | 失败,其值为[错误码](#41-ipcmsg) |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:k_comm_ipcmsg.h k_ipcmsg.h
+- 库文件:libipcmsg.a
+
+【注意】
+
+Service 可以添加多个,但不同的 service 不能使用相同的端口号,client 跟 service 是通
+
+过相同的端口号来通信的,因此一个 service能对应一个 client
+
+【举例】
+
+无
+
+【相关主题】
+
+[kd_ipcmsg_del_service](#212-kd_ipcmsg_del_service)
+
+#### 2.1.2 kd_ipcmsg_del_service
+
+【描述】
+
+删除服务
+
+【语法】
+
+k_s32 kd_ipcmsg_del_service(const k_char* pszServiceName);
+
+【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+|-----------------|-------------------------------------------------------------------|-----------|
+| pszServiceName | 服务的名称指针。服务名称最大长度: K_IPCMSG_MAX_SERVICENAME_LEN。 | 输入 |
+
+【返回值】
+
+| **返回值** | **描述** |
+|---------|---------------------------------|
+| 0 | 成功。 |
+| 非 0 | 失败,其值为[错误码](#41-ipcmsg) |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:k_comm_ipcmsg.h k_ipcmsg.h
+- 库文件:libipcmsg.a
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+[kd_ipcmsg_create_resp_message](#2112-kd_ipcmsg_create_resp_message)
+
+#### 2.1.3 kd_ipcmsg_try_connect
+
+【描述】
+
+非阻塞方式建立连接
+
+【语法】
+
+k_s32 kd_ipcmsg_try_connect(k_s32\* ps32Id, const k_char\* pszServiceName, [k_ipcmsg_handle_fn_ptr](#316-k_ipcmsg_handle_fn_ptr) pfnMessageHandle);
+
+【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+|-------------------|---------------------|-----------|
+| ps32Id | 消息通信 ID 指针。 | 输出 |
+| pszServiceName | 服务名称指针。 | 输入 |
+| pfnMessageHandle | 消息处理回调函数。 | 输入 |
+
+【返回值】
+
+| **返回值** | **描述** |
+|---------|---------------------------------|
+| 0 | 成功。 |
+| 非 0 | 失败,其值为[错误码](#41-ipcmsg) |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:k_comm_ipcmsg.h k_ipcmsg.h
+- 库文件:libipcmsg.a
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+[kd_ipcmsg_connect](#214-kd_ipcmsg_connect)
+
+[kd_ipcmsg_disconnect](#215-kd_ipcmsg_disconnect)
+
+#### 2.1.4 kd_ipcmsg_connect
+
+【描述】
+
+阻塞方式建立连接
+
+【语法】
+
+k_s32 kd_ipcmsg_connect(k_s32\* ps32Id, const k_char\* pszServiceName, [k_ipcmsg_handle_fn_ptr](#316-k_ipcmsg_handle_fn_ptr) pfnMessageHandle);
+
+【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+|-------------------|---------------------|-----------|
+| ps32Id | 消息通信 ID 指针。 | 输出 |
+| pszServiceName | 服务名称指针。 | 输入 |
+| pfnMessageHandle | 消息处理函数。 | 输入 |
+
+【返回值】
+
+| **返回值** | **描述** |
+|---------|---------------------------------|
+| 0 | 成功。 |
+| 非 0 | 失败,其值为[错误码](#41-ipcmsg) |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:k_comm_ipcmsg.h k_ipcmsg.h
+- 库文件:libipcmsg.a
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+[kd_ipcmsg_try_connect](#213-kd_ipcmsg_try_connect)
+
+[kd_ipcmsg_disconnect](#215-kd_ipcmsg_disconnect)
+
+#### 2.1.5 kd_ipcmsg_disconnect
+
+【描述】
+
+断开连接
+
+【语法】
+
+k_s32 kd_ipcmsg_disconnect(k_s32 s32Id);
+
+【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+|-----------|----------------|-----------|
+| s32Id | 消息通信 ID。 | 输入 |
+
+【返回值】
+
+| **返回值** | **描述** |
+|---------|---------------------------------|
+| 0 | 成功。 |
+| 非 0 | 失败,其值为[错误码](#41-ipcmsg) |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:k_comm_ipcmsg.h k_ipcmsg.h
+- 库文件:libipcmsg.a
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+[kd_ipcmsg_try_connect](#213-kd_ipcmsg_try_connect)
+
+[kd_ipcmsg_connect](#214-kd_ipcmsg_connect)
+
+#### 2.1.6 kd_ipcmsg_is_connect
+
+【描述】
+
+消息通信是否连接状态。
+
+【语法】
+
+k_bool kd_ipcmsg_is_connect(k_s32 s32Id);
+
+【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+|-----------|----------------|-----------|
+| s32Id | 消息通信 ID。 | 输入 |
+
+【返回值】
+
+| **返回值** | **描述** |
+|----------|--------------|
+| K_TRUE | 连接状态。 |
+| K_FALSE | 非连接状态。 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:k_comm_ipcmsg.h k_ipcmsg.h
+- 库文件:libipcmsg.a
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+#### 2.1.7 kd_ipcmsg_send_only
+
+【描述】
+
+仅发送消息给对端,不接收对端的返回值
+
+【语法】
+
+k_s32 kd_ipcmsg_send_only(k_s32 s32Id, [k_ipcmsg_message_s](#315-k_ipcmsg_messsage_s) *pstRequest);
+
+【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+|-------------|---------------------|-----------|
+| s32Id | 消息服务 ID。 | 输入 |
+| pstRequest | 消息结构体的指针。 | 输入 |
+
+【返回值】
+
+| **返回值** | **描述** |
+|-------------|---------------------------------|
+| 0 | 成功。 |
+| 非 0 | 失败,其值为[错误码](#41-ipcmsg) |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:k_comm_ipcmsg.h k_ipcmsg.h
+- 库文件:libipcmsg.a
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+#### 2.1.8 kd_ipcmsg_send_async
+
+【描述】
+
+发送异步消息。这个接口是非阻塞接口,发送消息到对端后就返回了,不会等待消息命令的处理过程。
+
+如果调用此接口发送回复消息,则不需要对端回复,否则对端必须回复
+
+【语法】
+
+k_s32 kd_ipcmsg_send_async(k_s32 s32Id, [k_ipcmsg_message_s](#315-k_ipcmsg_messsage_s)* pstMsg, k_ipcmsg_resphandle_fn_ptr pfnRespHandle);
+
+【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+|----------------|------------------------------------------------------------------------|-----------|
+| s32Id | 消息服务 ID。 | 输入 |
+| pstMsg | 消息指针。 | 输入 |
+| pfnRespHandle | 消息回复处理函数。在发送回复消息时可以为 NULL,其他情况不允许为 NULL。 | 输入 |
+
+【返回值】
+
+| **返回值** | **描述** |
+|---------|---------------------------------|
+| 0 | 成功。 |
+| 非 0 | 失败,其值为[错误码](#41-ipcmsg) |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:k_comm_ipcmsg.h k_ipcmsg.h
+- 库文件:libipcmsg.a
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+#### 2.1.9 kd_ipcmsg_send_sync
+
+【描述】
+
+发送同步消息。这个接口会阻塞等待对端消息命令处理完成后再返回。
+
+【语法】
+
+k_s32 kd_ipcmsg_send_sync(k_s32 s32Id, [k_ipcmsg_message_s](#315-k_ipcmsg_messsage_s)* pstMsg, [k_ipcmsg_message_s](#315-k_ipcmsg_messsage_s)** ppstMsg, k_s32 s32TimeoutMs);
+
+【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+|---------------|-------------------------|-----------|
+| s32Id | 消息服务 ID。 | 输入 |
+| pstMsg | 消息指针。 | 输入 |
+| ppstMsg | 回复消息的指针的指针。 | 输出 |
+| s32TimeoutMs | 超时时间。单位:ms。 | 输入 |
+
+【返回值】
+
+| **返回值** | **描述** |
+|---------|---------------------------------|
+| 0 | 成功。 |
+| 非 0 | 失败,其值为[错误码](#41-ipcmsg) |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:k_comm_ipcmsg.h k_ipcmsg.h
+- 库文件:libipcmsg.a
+
+【注意】
+
+本接口超时的情况下,内部会调用 [kd_ipcmsg_destory_message](#2113-kd_ipcmsg_destroy_message)将*ppstMsg(回复消
+
+息)销毁一次,由于同一个消息不能重复销毁,所以本接口超时退出后不必再做销毁
+
+回复消息的处理
+
+【举例】
+
+无
+
+【相关主题】
+
+#### 2.1.10 kd_ipcmsg_run
+
+【描述】
+
+消息处理函数
+
+【语法】
+
+k_void kd_ipcmsg_run(k_s32 s32Id);
+
+【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+|-----------|----------------|-----------|
+| s32Id | 消息服务 ID。 | 输入 |
+
+【返回值】
+
+| **返回值** | **描述** |
+|---------|------|
+| void | 无 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:k_comm_ipcmsg.h k_ipcmsg.h
+- 库文件:libipcmsg.a
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+#### 2.1.11 kd_ipcmsg_create_message
+
+【描述】
+
+创建消息
+
+【语法】
+
+[k_ipcmsg_message_s *](#315-k_ipcmsg_messsage_s)kd_ipcmsg_create_message(k_u32 u32Module, k_u32 u32CMD, k_void*
+pBody, k_u32 u32BodyLen);
+
+【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+|-------------|------------------------------------------------------------|-----------|
+| u32Module | 模块 ID。由用户创建,用于区分不同模块的不同消息。 | 输入 |
+| u32CMD | u32CMD 命令 ID。由用户创建,用于区分同一模块下的不同命令。 | 输入 |
+| pBody | 消息体指针 | 输入 |
+| u32BodyLen | 消息体大小 | 输入 |
+
+【返回值】
+
+| **返回值** | **描述** |
+|-----------------------|------------------|
+| k_ipcmsg_message_s* | 消息结构体指针。 |
+| null | 消息创建失败 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:k_comm_ipcmsg.h k_ipcmsg.h
+- 库文件:libipcmsg.a
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+[kd_ipcmsg_destory_message](#2113-kd_ipcmsg_destroy_message)
+
+#### 2.1.12 kd_ipcmsg_create_resp_message
+
+【描述】
+
+创建回复消息
+
+【语法】
+
+[k_ipcmsg_message_s](#315-k_ipcmsg_messsage_s)\* kd_ipcmsg_create_resp_message([k_ipcmsg_message_s](#315-k_ipcmsg_messsage_s)\* pstRequest, k_s32 s32RetVal, k_void* pBody, k_u32 u32BodyLen);
+
+【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+|-------------|-------------------------|-----------|
+| pstRequest | 请求消息的指针。 | 输入 |
+| s32RetVal | 回复返回值。 | 输入 |
+| pBody | 回复消息的消息体指针。 | 输入 |
+| u32BodyLen | 回复消息的消息体大小。 | 输入 |
+
+【返回值】
+
+| **返回值** | **描述** |
+|-----------------------|------------------|
+| k_ipcmsg_message_s* | 消息结构体指针。 |
+| null | 消息创建失败 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:k_comm_ipcmsg.h k_ipcmsg.h
+- 库文件:libipcmsg.a
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+[kd_ipcmsg_destory_message](#2113-kd_ipcmsg_destroy_message)
+
+#### 2.1.13 kd_ipcmsg_destroy_message
+
+【描述】
+
+销毁消息
+
+【语法】
+
+k_void kd_ipcmsg_destroy_message([k_ipcmsg_message_s](#315-k_ipcmsg_messsage_s)* pstMsg);
+
+【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+|-----------|-------------|-----------|
+| pstMsg | 消息指针。 | 输入 |
+
+【返回值】
+
+| **返回值** | **描述** |
+|---------|------|
+| k_void | 无 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:k_comm_ipcmsg.h k_ipcmsg.h
+- 库文件:libipcmsg.a
+
+【注意】
+
+不支持同一个消息重复销毁,否则会导致系统异常。
+
+【举例】
+
+无
+
+【相关主题】
+
+[kd_ipcmsg_create_message](#2111-kd_ipcmsg_create_message)
+
+[kd_ipcmsg_create_resp_message](#2112-kd_ipcmsg_create_resp_message)
+
+### 2.2 DATAFIFO
+
+该功能模块提供以下API:
+
+- [kd_datafifo_open](#221-kd_datafifo_open)
+- [kd_datafifo_open_by_addr](#222-kd_datafifo_open_by_addr)
+- [kd_datafifo_close](#223-kd_datafifo_close)
+- [kd_datafifo_read](#224-kd_datafifo_read)
+- [kd_datafifo_write](#225-kd_datafifo_write)
+- [kd_datafifo_cmd](#226-kd_datafifo_cmd)
+
+#### 2.2.1 kd_datafifo_open
+
+【描述】
+
+打开数据通路。
+
+【语法】
+
+k_s32 kd_datafifo_open([k_datafifo_handle](#321-k_datafifo_handle)\* Handle, [k_datafifo_params_s](#325-k_datafifo_params_s)\* pstParams)
+
+【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+|------------|---------------------|-----------|
+| Handle | 数据通路句柄。 | 输出 |
+| pstParams | 数据通路参数指针。 | 输入 |
+
+【返回值】
+
+| **返回值** | **描述** |
+|---------|-------------------------------------|
+| 0 | 成功。 |
+| 非 0 | 失败,其值为[错误码](#42-datafifo)。 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:k_datafifo.h
+- 库文件:libdatafifo.a
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+#### 2.2.2 kd_datafifo_open_by_addr
+
+【描述】
+
+通过物理地址打开数据通路。
+
+【语法】
+
+k_s32 kd_datafifo_open_by_addr([k_datafifo_handle](#321-k_datafifo_handle) \*Handle, [k_datafifo_params_s](#325-k_datafifo_params_s) *pstParams, k_u64 u64Phyaddr)
+
+【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+|-------------|-----------------------|-----------|
+| Handle | 数据通路句柄。 | 输出 |
+| pstParams | 数据通路参数指针。 | 输入 |
+| u32PhyAddr | 数据缓存的物理地址。 | 输入 |
+
+【返回值】
+
+| **返回值** | **描述** |
+|---------|-------------------------------------|
+| 0 | 成功。 |
+| 非 0 | 失败,其值为[错误码](#42-datafifo)。 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:k_datafifo.h
+- 库文件:libdatafifo.a
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+#### 2.2.3 kd_datafifo_close
+
+【描述】
+
+关闭数据通路。
+
+【语法】
+
+k_s32 kd_datafifo_close([k_datafifo_handle](#321-k_datafifo_handle) Handle)
+
+【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+|-----------|-----------------|-----------|
+| Handle | 数据通路句柄。 | 输入 |
+
+【返回值】
+
+| **返回值** | **描述** |
+|---------|-------------------------------------|
+| 0 | 成功。 |
+| 非 0 | 失败,其值为[错误码](#42-datafifo)。 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:k_datafifo.h
+- 库文件:libdatafifo.a
+
+【注意】
+
+关闭 DataFifo 的时候为了保证读写两端数据正常的释放,用户需要保证读端要读完DataFifo 中存在的数据,写端写完数据后需要额外调用一次[kd_datafifo_write](#225-kd_datafifo_write) (Handle, NULL) 触发写端的数据释放和读指针更新
+
+【举例】
+
+无
+
+#### 2.2.4 kd_datafifo_read
+
+【描述】
+
+读取数据。
+
+【语法】
+
+k_s32 kd_datafifo_read([k_datafifo_handle](#321-k_datafifo_handle) Handle, void** ppData)
+
+【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+|-----------|-------------------------|-----------|
+| Handle | 数据通路句柄。 | 输入 |
+| ppData | 读取的数据指针的指针。 | 输出 |
+
+【返回值】
+
+| **返回值** | **描述** |
+|---------|-------------------------------------|
+| 0 | 成功。 |
+| 非 0 | 失败,其值为[错误码](#42-datafifo)。 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:k_datafifo.h
+- 库文件:libdatafifo.a
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+#### 2.2.5 kd_datafifo_write
+
+【描述】
+
+写入数据。
+
+【语法】
+
+k_s32 kd_datafifo_write([k_datafifo_handle](#321-k_datafifo_handle) Handle, void* pData)
+
+【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+|-----------|-----------------|-----------|
+| Handle | 数据通路句柄。 | 输入 |
+| pData | 写入的数据。 | 输入 |
+
+【返回值】
+
+| **返回值** | **描述** |
+|---------|-------------------------------------|
+| 0 | 成功。 |
+| 非 0 | 失败,其值为[错误码](#42-datafifo)。 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:k_datafifo.h
+- 库文件:libdatafifo.a
+
+【注意】
+当 pData 为 NULL 时,触发写端的数据释放回调函数,同时更新写端的读尾指针。
+
+【举例】
+
+无
+
+#### 2.2.6 kd_datafifo_cmd
+
+【描述】
+
+其他操作。
+
+【语法】
+
+k_s32 kd_datafifo_cmd([k_datafifo_handle](#321-k_datafifo_handle) Handle, [k_datafifo_cmd_e](#326-k_datafifo_cmd_e) enCMD, void* pArg)
+
+【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+|-----------|-----------------------|-----------|
+| Handle | 数据通路句柄。 | 输入 |
+| enCMD | 操作命令。 | 输入 |
+| pArg | 参数,详见【注意】。 | **输入/输出** |
+
+【返回值】
+
+| **返回值** | **描述** |
+|-------------|-------------------------------------|
+| 0 | 成功。 |
+| 非 0 | 失败,其值为[错误码](#42-datafifo)。 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:k_datafifo.h
+- 库文件:libdatafifo.a
+
+【注意】
+控制命令和对应参数:
+
+| 命令 | 参数以及说明 |
+|------------------------------------------|------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------|
+| DATAFIFO_CMD_GET_PHY_ADDR | 返回 DATAFIFO 的物理地址,k_u64类型。 |
+| DATAFIFO_CMD_READ_DONE | 读端使用完数据后,需要调用这个更新读端的头尾指针。。 |
+| DATAFIFO_CMD_WRITE_DONE | 写端写完数据后,需要调用这个更新写端的写尾指针。无返回值,参数可以为 NULL。 |
+| DATAFIFO_CMD_SET_DATA_RELEASE \_CALLBACK | 数据释放回调函数。 |
+| DATAFIFO_CMD_GET_AVAIL_WRITE\_ LEN | 返回可写入的数据个数,k_u32 类型。 注意:由于需要保留一个数据项辅助buffer 管理,实际可用于缓存数据的长度比配置的 DATAFIFO 的长度u32EntriesNum* u32CacheLineSize)少一个数据项的长度(u32CacheLineSize)。 |
+| DATAFIFO_CMD_GET_AVAIL_READ_L EN | 返回可读取的数据个数,k_u32 类型 |
+
+【举例】
+
+无
+
+## 3. 数据类型
+
+### 3.1 IPCMSG
+
+该模块有如下数据类型
+
+- [K_IPCMSG_MAX_CONTENT_LEN](#311-k_ipcmsg_max_content_len)
+- [K_IPCMSG_PRIVDATA_NUM](#312-k_ipcmsg_privdata_num)
+- [K_IPCMSG_INVALID_MSGID](#313-k_ipcmsg_invalid_msgid)
+- [k_ipcmsg_connect_s](#314-k_ipcmsg_connect_s)
+- [k_ipcmsg_message_s](#315-k_ipcmsg_messsage_s)
+- [k_ipcmsg_handle_fn_ptr](#316-k_ipcmsg_handle_fn_ptr)
+
+#### 3.1.1 K_IPCMSG_MAX_CONTENT_LEN
+
+【说明】
+
+定义消息体最长度。
+
+【定义】
+
+```C
+#define K_IPCMSG_MAX_CONTENT_LEN (1024)
+```
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+无
+
+该模块有如下数据类型
+
+#### 3.1.2 K_IPCMSG_PRIVDATA_NUM
+
+【说明】
+
+定义消息体中私有数据最大个数。
+
+【定义】
+
+```C
+#define K_IPCMSG_MAX\_ PRIVDATA_NUM (8)
+```
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+无
+
+#### 3.1.3 K_IPCMSG_INVALID_MSGID
+
+【说明】
+
+定义无效消息 ID。
+
+【定义】
+
+```C
+#define K_IPCMSG_INVALID_MSGID (0xFFFFFFFFFFFFFFFF)
+```
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+无
+
+#### 3.1.4 k_ipcmsg_connect_s
+
+【说明】
+
+定义模块 ID 枚举类型。
+
+【定义】
+
+```C
+
+typedef struct IPCMSG_CONNECT_S
+
+{
+
+k_u32 u32RemoteId;
+
+k_u32 u32Port;
+
+k_u32 u32Priority;
+
+} k_ipcmsg_connect_s;
+```
+
+【成员】
+
+| **成员名称** | **描述** |
+|--------------|----------------------------------------------------------------------|
+| u32RemoteId | 标示连接远端 CPU 的枚举值。 0:小核; 1:大核 |
+| u32Port | 消息通信用的自定义 port 号 取值范围:\[0, 512\] |
+| u32Priority | 消息传递的优先级。 取值范围: 0:普通优先级; 1:高优先级。 默认为 0 |
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+[kd_ipcmsg_add_service](#211-kd_ipcmsg_add_service)
+
+#### 3.1.5 k_ipcmsg_messsage_s
+
+【说明】
+
+定义消息结构体。
+
+【定义】
+
+``` C
+
+typedef struct IPCMSG_MESSAGE_S
+
+{
+
+k_bool bIsResp; /**cat /proc/ipcm
+
+*---REMOTE NODE: ID=0, STATE: READY
+
+\|-RECV BUFFER, PHYS\<0x0000000000180000, 0x00079000\>
+
+\|-SEND BUFFER, PHYS\<0x0000000000100000, 0x00080000\>
+
+\|-Port \| State \| Send Count \| Recv Count \| Max Send Len \| Max Recv Len
+
+1 Connected 15 15 320 608
+
+*---LOCAL NODE: ID=1, STATE: ALIVE
+```
+
+【调试信息分析】
+
+记录当前ipcm模块的使用情况
+
+【参数说明】
+
+| **参数** | **描述** | |
+|--------------|---------------|----------------------------|
+| REMOTE NODE | ID | 远端处理器的ID号 |
+| | STATE | 远端处理器的状态。 |
+| | RECV BUFFER | 接收buffer的物理地址区间 |
+| | SEND BUFFER | 发送buffer的物理地址区间。 |
+| | Port | 端口号 |
+| | State | 端口连接状态 |
+| | Send Count | 发送次数 |
+| | Recv Count | 接收次数 |
+| | Max Send len | 最大发送的数据长度 |
+| | Max Recv len | 最大接收的数据长度 |
diff --git "a/zh/01_software/board/cdk/K230_\347\263\273\347\273\237\346\216\247\345\210\266_MAPI\345\217\202\350\200\203.md" "b/zh/01_software/board/cdk/K230_\347\263\273\347\273\237\346\216\247\345\210\266_MAPI\345\217\202\350\200\203.md"
new file mode 100644
index 0000000..f30e2f4
--- /dev/null
+++ "b/zh/01_software/board/cdk/K230_\347\263\273\347\273\237\346\216\247\345\210\266_MAPI\345\217\202\350\200\203.md"
@@ -0,0 +1,599 @@
+# K230系统控制MAPI参考
+
+
+
+版权所有©2023北京嘉楠捷思信息技术有限公司
+
+
+
+## 免责声明
+
+您购买的产品、服务或特性等应受北京嘉楠捷思信息技术有限公司(“本公司”,下同)及其关联公司的商业合同和条款的约束,本文档中描述的全部或部分产品、服务或特性可能不在您的购买或使用范围之内。除非合同另有约定,本公司不对本文档的任何陈述、信息、内容的正确性、可靠性、完整性、适销性、符合特定目的和不侵权提供任何明示或默示的声明或保证。除非另有约定,本文档仅作为使用指导参考。
+
+由于产品版本升级或其他原因,本文档内容将可能在未经任何通知的情况下,不定期进行更新或修改。
+
+## 商标声明
+
+、“嘉楠”和其他嘉楠商标均为北京嘉楠捷思信息技术有限公司及其关联公司的商标。本文档可能提及的其他所有商标或注册商标,由各自的所有人拥有。
+
+**版权所有 © 2023北京嘉楠捷思信息技术有限公司。保留一切权利。**
+非经本公司书面许可,任何单位和个人不得擅自摘抄、复制本文档内容的部分或全部,并不得以任何形式传播。
+
+
+
+## 目录
+
+[TOC]
+
+## 前言
+
+### 概述
+
+本文档主要介绍MAPI中系统控制模块的功能和用法,其它模块的功能和用法将各有专门的文档加以论述。
+
+### 读者对象
+
+本文档(本指南)主要适用于以下人员:
+
+- 技术支持工程师
+- 软件开发工程师
+
+### 缩略词定义
+
+| 简称 | 说明 |
+|------|-------------------------------------|
+| mpp | Media Process Platform 媒体处理平台 |
+| vb | video buffer 视频缓存池 |
+
+### 修订记录
+
+| 文档版本号 | 修改说明 | 修改者 | 日期 |
+|------------|----------|--------|----------|
+| V1.0 | 初版 | 郝海波 | 2023/5/4 |
+
+## 1. 概述
+
+### 1.1 概述
+
+系统控制根据 k230芯片特性,完成硬件各个部件的复位、基本初始化工作,同时负责完成 MPP(Media Process Platform 媒体处理平台)系统核间通讯建立,多媒体内存管理等模块的初始化、去初始化。
+
+### 1.2 功能描述
+
+MAPI的特性是跨OS调用,在K230的大小核上均可以调用相同的API来实现需要的功能。整体的系统架构如下图所示
+
+关于MAPI中涉及绑定以及内存管理的具体内容请参考文档《K230 系统控制 API参考 V1.0》中的相关内容
+
+## 2. API参考
+
+该功能模块提供以下API:
+
+- [K230系统控制MAPI参考](#k230系统控制mapi参考)
+ - [免责声明](#免责声明)
+ - [商标声明](#商标声明)
+ - [目录](#目录)
+ - [前言](#前言)
+ - [概述](#概述)
+ - [读者对象](#读者对象)
+ - [缩略词定义](#缩略词定义)
+ - [修订记录](#修订记录)
+ - [1. 概述](#1-概述)
+ - [1.1 概述](#11-概述)
+ - [1.2 功能描述](#12-功能描述)
+ - [2. API参考](#2-api参考)
+ - [2.1 kd\_mapi\_sys\_init](#21-kd_mapi_sys_init)
+ - [2.2 kd\_mapi\_sys\_deinit](#22-kd_mapi_sys_deinit)
+ - [2.3 kd\_mapi\_media\_init](#23-kd_mapi_media_init)
+ - [2.4 kd\_mapi\_media\_deinit](#24-kd_mapi_media_deinit)
+ - [2.5 kd\_mapi\_alloc\_buffer](#25-kd_mapi_alloc_buffer)
+ - [2.6 kd\_mapi\_free\_buffer](#26-kd_mapi_free_buffer)
+ - [2.7 kd\_mapi\_sys\_get\_vb\_block](#27-kd_mapi_sys_get_vb_block)
+ - [2.8 kd\_mapi\_sys\_release\_vb\_block](#28-kd_mapi_sys_release_vb_block)
+ - [3. 数据类型](#3-数据类型)
+ - [3.1 k\_mapi\_mod\_id\_e](#31-k_mapi_mod_id_e)
+ - [3.2 k\_mapi\_media\_config\_t](#32-k_mapi_media_config_t)
+ - [3.3 k\_mapi\_media\_attr\_t](#33-k_mapi_media_attr_t)
+ - [4. 错误码](#4-错误码)
+
+### 2.1 kd_mapi_sys_init
+
+【描述】
+
+初始化系统资源,建立双核间的消息通信管道。为了建立双核连接,在每个操作系统上运行的服务需要在初始化过程中调用这个接口来建立连接,然后才能进行核间通信。
+
+【语法】
+
+k_s32 kd_mapi_sys_init(void );
+
+【参数】
+
+无
+
+【返回值】
+
+| **返回值** | **描述** |
+|--------|---------------------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见[错误码](#4-错误码) |
+
+【芯片差异】
+
+无。
+
+【需求】
+
+- 头文件:mapi_sys_api.h
+- 库文件:libmapi.a
+
+【注意】
+
+这个函数需要在调用kd_mapi_media_init之前被调用
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+### 2.2 kd_mapi_sys_deinit
+
+【描述】
+
+去初始化系统资源,断开双核间的消息通信管道。
+
+【语法】
+
+k_s32 kd_mapi_sys_deinit(void );
+
+【参数】
+
+无
+
+【返回值】
+
+| **返回值** | **描述** |
+|--------|---------------------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见[错误码](#4-错误码) |
+
+【芯片差异】
+
+无。
+
+【需求】
+
+- 头文件:mapi_sys_api.h
+- 库文件:libmapi.a
+
+【注意】
+
+当kd_mapi_sys_init没有被调用时,对这个mapi的调用返回成功。
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+### 2.3 kd_mapi_media_init
+
+【描述】
+
+初始化多媒体相关资源。主要是配置vb的个数和大小
+
+【语法】
+
+k_s32 kd_mapi_media_init(const [k_mapi_media_attr_t](#33-k_mapi_media_attr_t) *media_attr);
+
+【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+|------------|--------------|-----------|
+| media_attr | 媒体属性指针 | 输入 |
+
+【返回值】
+
+| **返回值** | **描述** |
+|--------|---------------------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见[错误码](#4-错误码) |
+
+【芯片差异】
+
+无。
+
+【需求】
+
+- 头文件:mapi_sys_api.h
+- 库文件:libmapi.a
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+### 2.4 kd_mapi_media_deinit
+
+【描述】
+
+去初始化多媒体相关资源。
+
+【语法】
+
+k_s32 kd_mapi_media_deinit(void);
+
+【参数】
+
+无
+
+【返回值】
+
+| **返回值** | **描述** |
+|--------|---------------------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见[错误码](#4-错误码) |
+
+【芯片差异】
+
+无。
+
+【需求】
+
+- 头文件:mapi_sys_api.h
+- 库文件:libmapi.a
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+### 2.5 kd_mapi_alloc_buffer
+
+【描述】
+
+在用户态分配 MMZ 的内存(带cache)
+
+【语法】
+
+k_s32 kd_mapi_alloc_buffer(k_u64 *phys_addr, void **virt_addr, k_u32 len, const k_char *name);
+
+【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+|-----------|------------------|-----------|
+| phys_addr | buffer的物理地址 | 输出 |
+| virt_addr | buffer的虚拟地址 | 输出 |
+| len | buffer的长度 | 输入 |
+| name | buffer的名称 | 输入 |
+
+【返回值】
+
+| **返回值** | **描述** |
+|--------|---------------------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见[错误码](#4-错误码) |
+
+【芯片差异】
+
+无。
+
+【需求】
+
+- 头文件:mapi_sys_api.h
+- 库文件:libmapi.a
+
+【注意】
+
+- Buffer 的虚拟地址和物理地址已经映射
+- 在分配内存之后在大核端msh下通过 cat /proc/umap/media-mem 查看 buffer 是否分配成功。
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+### 2.6 kd_mapi_free_buffer
+
+【描述】
+
+在用户态释放 MMZ 的内存。
+
+【语法】
+
+k_s32 kd_mapi_free_buffer(k_u64 phys_addr, void *virt_addr, k_u32 len);
+
+【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+|-----------|------------------|-----------|
+| phys_addr | buffer的物理地址 | 输入 |
+| virt_addr | buffer的虚拟地址 | 输入 |
+| len | buffer的长度 | 输入 |
+
+【返回值】
+
+| **返回值** | **描述** |
+|--------|---------------------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见[错误码](#4-错误码) |
+
+【芯片差异】
+
+无。
+
+【需求】
+
+- 头文件:mapi_sys_api.h
+- 库文件:libmapi.a
+
+【注意】
+
+在释放内存之后在大核端msh下通过 cat /proc/umap/media-mem 查看 buffer 是否释放成功。
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+### 2.7 kd_mapi_sys_get_vb_block
+
+【描述】
+
+在用户态获取一个缓存块。
+
+【语法】
+
+k_s32 kd_mapi_sys_get_vb_block(k_u32 \*pool_id, k_u64 \*phys_addr, k_u64 blk_size, const char\* mmz_name);
+
+【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+|-----------|------------------------|-----------|
+| pool_id | 缓存块所在的缓存池ID号 | 输出 |
+| phys_addr | 缓存块的物理地址 | 输出 |
+| blk_size | 缓存块的大小 | 输入 |
+| mmz_name | 缓存池所在的ddr的名称 | 输入 |
+
+【返回值】
+
+| **返回值** | **描述** |
+|--------|---------------------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见[错误码](#4-错误码) |
+
+【芯片差异】
+
+无。
+
+【需求】
+
+- 头文件:mapi_sys_api.h
+- 库文件:libmapi.a
+
+【注意】
+
+- 如果用户需要从任意一个公共缓存池中获取一块指定大小的缓存块,将第 2 个参数 blk_size 设置为需要的缓存块大小,并指定要从哪个 DDR 上的公共缓存池获取缓存块。如果指定的 DDR 上并没有公共缓存池,那么将获取不到缓存块。如果mmz_name 等于 NULL,则表示在没有命名的 DDR 上的公共缓存池获取缓存块
+- 媒体初始化时,如果 VB 在没有命名的 DDR 中创建缓存池,则从任意一个公共缓存池中获取一块指定大小的缓存块, mmz_name设置为 NULL 即可
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+### 2.8 kd_mapi_sys_release_vb_block
+
+【描述】
+
+在用户态释放一个缓存块。
+
+【语法】
+
+k_s32 kd_mapi_sys_release_vb_block(k_u64 phys_addr, k_u64 blk_size);
+
+【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+|-----------|------------------|-----------|
+| phys_addr | 缓存块的物理地址 | 输出 |
+| blk_size | 缓存块的大小 | 输入 |
+
+【返回值】
+
+| **返回值** | **描述** |
+|--------|---------------------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见[错误码](#4-错误码) |
+
+【芯片差异】
+
+无。
+
+【需求】
+
+- 头文件:mapi_sys_api.h
+- 库文件:libmapi.a
+
+【注意】
+
+获取的缓存块使用完后,应该调用此接口释放缓存块。
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+## 3. 数据类型
+
+### 3.1 k_mapi_mod_id_e
+
+【说明】
+
+定义MAPI模块ID
+
+【定义】
+
+```C
+
+typedef enum
+
+{
+
+K_MAPI_MOD_SYS = 0,
+
+K_MAPI_MOD_VI,
+
+K_MAPI_MOD_VPROC,
+
+K_MAPI_MOD_VENC,
+
+K_MAPI_MOD_VDEC,
+
+K_MAPI_MOD_VREC,
+
+K_MAPI_MOD_VO,
+
+K_MAPI_MOD_AI,
+
+K_MAPI_MOD_AENC,
+
+K_MAPI_MOD_ADEC,
+
+K_MAPI_MOD_AREC,
+
+K_MAPI_MOD_AO,
+
+K_MAPI_MOD_VVI,
+
+K_MAPI_MOD_VVO,
+
+K_MAPI_MOD_DPU,
+
+K_MAPI_MOD_VICAP,
+
+K_MAPI_MOD_SENSOR,
+
+K_MAPI_MOD_ISP,
+
+K_MAPI_MOD_BUTT,
+
+} k_mapi_mod_id_e;
+```
+
+【成员】
+
+无
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+无
+
+### 3.2 k_mapi_media_config_t
+
+【说明】
+
+定义媒体配置属性结构体
+
+【定义】
+
+```C
+
+typedef struct {
+
+k_vb_supplement_config vb_supp;
+
+k_vb_config vb_config;
+
+} k_mapi_media_config_t;
+```
+
+【成员】
+
+| **成员名称** | **描述** |
+|--------------|-----------------------------------------------------|
+| vb_supp | VB 附加信息结构体,参见《K230 系统控制 API参考》 |
+| vb_config | 视频缓存池属性结构体,参见《K230 系统控制 API参考》 |
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+无
+
+### 3.3 k_mapi_media_attr_t
+
+【说明】
+
+定义媒体初始化属性结构体
+
+【定义】
+
+```C
+
+typedef struct {
+
+k_mapi_media_config_t media_config;
+
+} k_mapi_media_attr_t;
+```
+
+【成员】
+
+| **成员名称** | **描述** |
+|--------------|--------------------|
+| media_config | 媒体配置属性结构体 |
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+无
+
+## 4. 错误码
+
+表 41
+
+| 错误代码 | 宏定义 | **描述** |
+|------------|------------------------------|------------------------------|
+| 0xb0008003 | K_MAPI_ERR_SYS_ILLEGAL_PARAM | 参数错误 |
+| 0xb0008006 | K_MAPI_ERR_SYS_NULL_PTR | 空指针错误 |
+| 0xb0008009 | K_MAPI_ERR_SYS_NOT_PERM | 操作不允许 |
+| 0xb0008010 | K_MAPI_ERR_SYS_NOTREADY | 设备未就绪 |
+| 0xb0008012 | K_MAPI_ERR_SYS_BUSY | 系统忙 |
+| 0xb000800c | K_MAPI_ERR_SYS_NOMEM | 分配内存失败,如系统内存不足 |
diff --git a/zh/01_software/board/cdk/images/5405a8e58a3314ae95f2d737dd0c01d9.png b/zh/01_software/board/cdk/images/5405a8e58a3314ae95f2d737dd0c01d9.png
new file mode 100644
index 0000000..3a98d83
Binary files /dev/null and b/zh/01_software/board/cdk/images/5405a8e58a3314ae95f2d737dd0c01d9.png differ
diff --git a/zh/01_software/board/cdk/images/91c0f5a20c9460bd6c865a704f7b9404.png b/zh/01_software/board/cdk/images/91c0f5a20c9460bd6c865a704f7b9404.png
new file mode 100644
index 0000000..f239a3a
Binary files /dev/null and b/zh/01_software/board/cdk/images/91c0f5a20c9460bd6c865a704f7b9404.png differ
diff --git a/zh/01_software/board/cdk/images/canaan-cover.png b/zh/01_software/board/cdk/images/canaan-cover.png
new file mode 100644
index 0000000..0319765
Binary files /dev/null and b/zh/01_software/board/cdk/images/canaan-cover.png differ
diff --git a/zh/01_software/board/cdk/images/logo.png b/zh/01_software/board/cdk/images/logo.png
new file mode 100644
index 0000000..aa48558
Binary files /dev/null and b/zh/01_software/board/cdk/images/logo.png differ
diff --git "a/zh/01_software/board/examples/K230_SDK_Demo\344\275\277\347\224\250\346\214\207\345\215\227.md" "b/zh/01_software/board/examples/K230_SDK_Demo\344\275\277\347\224\250\346\214\207\345\215\227.md"
new file mode 100755
index 0000000..775494a
--- /dev/null
+++ "b/zh/01_software/board/examples/K230_SDK_Demo\344\275\277\347\224\250\346\214\207\345\215\227.md"
@@ -0,0 +1,1210 @@
+# K230 SDK Demo使用指南
+
+
+
+版权所有©2023北京嘉楠捷思信息技术有限公司
+
+
+
+## 免责声明
+
+您购买的产品、服务或特性等应受北京嘉楠捷思信息技术有限公司(“本公司”,下同)及其关联公司的商业合同和条款的约束,本文档中描述的全部或部分产品、服务或特性可能不在您的购买或使用范围之内。除非合同另有约定,本公司不对本文档的任何陈述、信息、内容的正确性、可靠性、完整性、适销性、符合特定目的和不侵权提供任何明示或默示的声明或保证。除非另有约定,本文档仅作为使用指导参考。
+
+由于产品版本升级或其他原因,本文档内容将可能在未经任何通知的情况下,不定期进行更新或修改。
+
+## 商标声明
+
+、“嘉楠”和其他嘉楠商标均为北京嘉楠捷思信息技术有限公司及其关联公司的商标。本文档可能提及的其他所有商标或注册商标,由各自的所有人拥有。
+
+**版权所有 © 2023北京嘉楠捷思信息技术有限公司。保留一切权利。**
+非经本公司书面许可,任何单位和个人不得擅自摘抄、复制本文档内容的部分或全部,并不得以任何形式传播。
+
+
+
+## 目录
+
+[TOC]
+
+## 前言
+
+### 概述
+
+本文档主要K230 SDK中提供的demo程序。
+
+### 读者对象
+
+本文档(本指南)主要适用于以下人员:
+
+- 技术支持工程师
+- 软件开发工程师
+
+### 缩略词定义
+
+| 简称 | 说明 |
+|------|-------------------------------------------------------------|
+| UVC | USB video class(USB摄像头) |
+| VVI | virtual video input,虚拟视频输入,主要用于 pipeline 的调试 |
+
+### 修订记录
+
+| 文档版本号 | 修改说明 | 修改者 | 日期 |
+|---|---|---|---|
+| V1.0 | 初版 | 系统软件部 | 2023-03-10 |
+| V1.1. | 增加VICAP、DPU demo、UVC demo描述 | 系统软件部 | 2023-04-07 |
+| V1.2. | 增加多路venc编码demo, 增加vi-\>venc-\>MAPI-\>小核存文件demo; 更新VICAP使用说明,支持多路输出及输出图像的缩放裁剪功能; 现有demo均支持sharefs方式加载或保存音频文件; 增加编码demo:ai-\>aenc-\>file 增加解码demo:file-\>adec-\>ao; 增加音频综合demo:ai-\>aenc adec-\>ao; UVC demo大核端执行命令修改; 增加MAPI视频编码demo运行描述; 增加VICAP、KPU、VO联调demo; | 系统软件部 | 2023-05-06 |
+| V1.3 | 修改venc demo、vdec demo、nonai_2d demo使用说明; 增加rtsp推流demo说明 | 系统软件部 | 2023-5-31 |
+| V1.4 | 添加sharefs使用说明 | SDK部 | 2023-6-1 |
+| V1.5 | 增加语音对讲Demo说明 | SDK部 | 2023-6-12 |
+| V1.6 | 增加DRM demo,增加LVGL demo | SDK部 | 2023-6-29 |
+| V1.7 | 修改venc demo中的sensor参数,vdec demo中增加MAPI VDEC绑定VO解码显示 | SDK部 | 2023-6-30 |
+| V1.8 | 修改mapi sample_venc和rtsp_demo的使用说明 | SDK部 | 2023-7-1 |
+
+## 1. 概述
+
+此文档介绍K230 SDK提供的demo功能,使用方法等。其中rt-smart上的可执行程序都默认编译到了小核/sharefs目录下, 测试大核程序时,需要等待小核完全启动,之后在大核的msh中进入/sharefs/app目录内测试。各测试demo用到的音视频资源文件,可到以下链接地址获取
+:8554/BackChannelTest` 的url地址)
+
+板B上的具体的执行步骤:
+
+1. 启动开发板后,进入小核/mnt目录下:
+1. 在小核上执行:`insmod k_ipcm.ko`
+1. 在大核上执行:`cd /bin; ./sample_sys_init.elf`
+1. 在小核上执行:`./backclient_test rtsp::8554/BackChannelTest`)
+
+### 2.19 深度图显示 Demo
+
+#### 2.19.1 Demo 简介
+
+本 demo 用于将 dpu 处理的深度图显示在屏幕上。
+
+#### 2.19.2 Feature说明
+
+1. 将 vicap 绑定 dma,dma 绑定 dpu;
+1. 启动 dpu,dma,vicap,vo;
+1. isp 把散斑图送给 dma,dma 旋转九十度以后送给 dpu,dpu 进行深度处理;
+1. 在用户态获取深度结果;
+1. 将深度图送给 vo 进行显示。
+
+#### 2.19.3 依赖资源
+
+需要标定文件,包括配置文件和参考图文件。配置文件和参考图文件需要和 sensor 配套。配置文件和参考图文件路径在`k230_sdk/test_resource/dpu`目录下,该配置文件和参考图文件仅和 sensor1 对应。
+
+#### 2.19.4 使用说明
+
+##### 2.19.4.1 编译
+
+1. 将配置文件和参考图文件放在`k230_sdk/src/big/rt-smart/userapps/root/bin/dpu`目录下。
+1. 在`k230_sdk`目录下执行编译命令`make`
+1. 编译完成后在`k230_sdk/src/big/mpp/userapps/sample/elf`目录下会有 demo 对应的`sample_dpu_vo.elf`文件。在`k230_sdk/output/k230_evb_defconfig/images`目录下会有系统镜像文件`sysimage-sdcard.img`。
+
+> 更详细的编译过程可以参考release sdk软件包中的README.md。
+
+##### 2.19.4.2 执行
+
+1. 使用 sharefs,具体步骤参考`K230 SDK 开发使用流程`;
+1. 挂载 nfs,挂载成功以后在大小核都可以看到`/sharefs`目录,将编译出来的 demo `sample_dpu_vo.elf`拷贝到服务器的 nfs 目录下,此时在大核 rtt 的`/sharefs`下也能看到对应的 elf 文件.
+1. 使用命令`./sample_dpu_vo.elf`启动 demo,此时会在屏幕上显示 dpu 处理后的深度图。
+1. 按'q'退出 demo。
diff --git a/zh/01_software/board/examples/images/09cbde8d64c0df2f2cb4f7c96e00ec99.png b/zh/01_software/board/examples/images/09cbde8d64c0df2f2cb4f7c96e00ec99.png
new file mode 100644
index 0000000..0a649f4
Binary files /dev/null and b/zh/01_software/board/examples/images/09cbde8d64c0df2f2cb4f7c96e00ec99.png differ
diff --git a/zh/01_software/board/examples/images/100ece476c397937609fc134d00b06f4.png b/zh/01_software/board/examples/images/100ece476c397937609fc134d00b06f4.png
new file mode 100644
index 0000000..29104a9
Binary files /dev/null and b/zh/01_software/board/examples/images/100ece476c397937609fc134d00b06f4.png differ
diff --git a/zh/01_software/board/examples/images/173605eb81594328bcb17479f8ea0525.png b/zh/01_software/board/examples/images/173605eb81594328bcb17479f8ea0525.png
new file mode 100644
index 0000000..6af3804
Binary files /dev/null and b/zh/01_software/board/examples/images/173605eb81594328bcb17479f8ea0525.png differ
diff --git a/zh/01_software/board/examples/images/1f24a6530d8c0d1ed22bb3eea26a33fb.png b/zh/01_software/board/examples/images/1f24a6530d8c0d1ed22bb3eea26a33fb.png
new file mode 100644
index 0000000..c814dad
Binary files /dev/null and b/zh/01_software/board/examples/images/1f24a6530d8c0d1ed22bb3eea26a33fb.png differ
diff --git a/zh/01_software/board/examples/images/23936fc04197c90f5c68c38c3d235506.png b/zh/01_software/board/examples/images/23936fc04197c90f5c68c38c3d235506.png
new file mode 100644
index 0000000..ddfc58c
Binary files /dev/null and b/zh/01_software/board/examples/images/23936fc04197c90f5c68c38c3d235506.png differ
diff --git a/zh/01_software/board/examples/images/23f111756ad924f5538cce7c691da0df.png b/zh/01_software/board/examples/images/23f111756ad924f5538cce7c691da0df.png
new file mode 100644
index 0000000..9371eeb
Binary files /dev/null and b/zh/01_software/board/examples/images/23f111756ad924f5538cce7c691da0df.png differ
diff --git a/zh/01_software/board/examples/images/24db1c231608cd26a5a981e055aa6910.png b/zh/01_software/board/examples/images/24db1c231608cd26a5a981e055aa6910.png
new file mode 100644
index 0000000..ac876d8
Binary files /dev/null and b/zh/01_software/board/examples/images/24db1c231608cd26a5a981e055aa6910.png differ
diff --git a/zh/01_software/board/examples/images/280f20f20d268b367aaa86656ad58f89.png b/zh/01_software/board/examples/images/280f20f20d268b367aaa86656ad58f89.png
new file mode 100644
index 0000000..cd0889b
Binary files /dev/null and b/zh/01_software/board/examples/images/280f20f20d268b367aaa86656ad58f89.png differ
diff --git a/zh/01_software/board/examples/images/2bd93e4768f76c6af98aa69137156f09.png b/zh/01_software/board/examples/images/2bd93e4768f76c6af98aa69137156f09.png
new file mode 100644
index 0000000..6b7b354
Binary files /dev/null and b/zh/01_software/board/examples/images/2bd93e4768f76c6af98aa69137156f09.png differ
diff --git a/zh/01_software/board/examples/images/30666ad0db223389adabf15fe92e1e80.png b/zh/01_software/board/examples/images/30666ad0db223389adabf15fe92e1e80.png
new file mode 100644
index 0000000..56166b6
Binary files /dev/null and b/zh/01_software/board/examples/images/30666ad0db223389adabf15fe92e1e80.png differ
diff --git a/zh/01_software/board/examples/images/3b33422c3971dfa1f226f71d937cd97f.png b/zh/01_software/board/examples/images/3b33422c3971dfa1f226f71d937cd97f.png
new file mode 100644
index 0000000..5f897e6
Binary files /dev/null and b/zh/01_software/board/examples/images/3b33422c3971dfa1f226f71d937cd97f.png differ
diff --git a/zh/01_software/board/examples/images/3e2e061af6118ae112633da2aaba6376.png b/zh/01_software/board/examples/images/3e2e061af6118ae112633da2aaba6376.png
new file mode 100644
index 0000000..349f576
Binary files /dev/null and b/zh/01_software/board/examples/images/3e2e061af6118ae112633da2aaba6376.png differ
diff --git a/zh/01_software/board/examples/images/48a50a418c0daae2a69d6bb70306b0b8.png b/zh/01_software/board/examples/images/48a50a418c0daae2a69d6bb70306b0b8.png
new file mode 100644
index 0000000..96d5189
Binary files /dev/null and b/zh/01_software/board/examples/images/48a50a418c0daae2a69d6bb70306b0b8.png differ
diff --git a/zh/01_software/board/examples/images/4ecbd28b50bd69bd41b768f4f2755970.png b/zh/01_software/board/examples/images/4ecbd28b50bd69bd41b768f4f2755970.png
new file mode 100644
index 0000000..a50ea25
Binary files /dev/null and b/zh/01_software/board/examples/images/4ecbd28b50bd69bd41b768f4f2755970.png differ
diff --git a/zh/01_software/board/examples/images/679c55d5ff6a6601db43517c5f23cabb.png b/zh/01_software/board/examples/images/679c55d5ff6a6601db43517c5f23cabb.png
new file mode 100644
index 0000000..b319ab4
Binary files /dev/null and b/zh/01_software/board/examples/images/679c55d5ff6a6601db43517c5f23cabb.png differ
diff --git a/zh/01_software/board/examples/images/684818ccc41bf1afdcbd698f96b273fe.png b/zh/01_software/board/examples/images/684818ccc41bf1afdcbd698f96b273fe.png
new file mode 100644
index 0000000..a694e86
Binary files /dev/null and b/zh/01_software/board/examples/images/684818ccc41bf1afdcbd698f96b273fe.png differ
diff --git a/zh/01_software/board/examples/images/764192b171dc3580719e4e2f6bfecaef.png b/zh/01_software/board/examples/images/764192b171dc3580719e4e2f6bfecaef.png
new file mode 100644
index 0000000..6426e8e
Binary files /dev/null and b/zh/01_software/board/examples/images/764192b171dc3580719e4e2f6bfecaef.png differ
diff --git a/zh/01_software/board/examples/images/790e5fbd22a7a096be88b2155d93b1e8.png b/zh/01_software/board/examples/images/790e5fbd22a7a096be88b2155d93b1e8.png
new file mode 100644
index 0000000..9d3b434
Binary files /dev/null and b/zh/01_software/board/examples/images/790e5fbd22a7a096be88b2155d93b1e8.png differ
diff --git a/zh/01_software/board/examples/images/818c74d25d2fb4e277bd8cab41863b56.png b/zh/01_software/board/examples/images/818c74d25d2fb4e277bd8cab41863b56.png
new file mode 100644
index 0000000..cafeb3a
Binary files /dev/null and b/zh/01_software/board/examples/images/818c74d25d2fb4e277bd8cab41863b56.png differ
diff --git a/zh/01_software/board/examples/images/8438ab40fd6e987e1a8878660364143a.png b/zh/01_software/board/examples/images/8438ab40fd6e987e1a8878660364143a.png
new file mode 100644
index 0000000..0913e40
Binary files /dev/null and b/zh/01_software/board/examples/images/8438ab40fd6e987e1a8878660364143a.png differ
diff --git a/zh/01_software/board/examples/images/848564fdbda5a96c835b074ebfcd423f.png b/zh/01_software/board/examples/images/848564fdbda5a96c835b074ebfcd423f.png
new file mode 100644
index 0000000..3c23c11
Binary files /dev/null and b/zh/01_software/board/examples/images/848564fdbda5a96c835b074ebfcd423f.png differ
diff --git a/zh/01_software/board/examples/images/8c32c668277867b2ab314e47c2d96d03.png b/zh/01_software/board/examples/images/8c32c668277867b2ab314e47c2d96d03.png
new file mode 100644
index 0000000..a01ebbc
Binary files /dev/null and b/zh/01_software/board/examples/images/8c32c668277867b2ab314e47c2d96d03.png differ
diff --git a/zh/01_software/board/examples/images/9632019b56c92e6f39d678cd16069c37.png b/zh/01_software/board/examples/images/9632019b56c92e6f39d678cd16069c37.png
new file mode 100644
index 0000000..3a35d22
Binary files /dev/null and b/zh/01_software/board/examples/images/9632019b56c92e6f39d678cd16069c37.png differ
diff --git a/zh/01_software/board/examples/images/965a442d281e6cc9d3ecbbedad808f10.png b/zh/01_software/board/examples/images/965a442d281e6cc9d3ecbbedad808f10.png
new file mode 100644
index 0000000..567c99a
Binary files /dev/null and b/zh/01_software/board/examples/images/965a442d281e6cc9d3ecbbedad808f10.png differ
diff --git a/zh/01_software/board/examples/images/96d5c266517e45cfc95d9bcb65bcebaa.png b/zh/01_software/board/examples/images/96d5c266517e45cfc95d9bcb65bcebaa.png
new file mode 100644
index 0000000..e14850b
Binary files /dev/null and b/zh/01_software/board/examples/images/96d5c266517e45cfc95d9bcb65bcebaa.png differ
diff --git a/zh/01_software/board/examples/images/9a3c47da0975b0226e75453a79a8da2c.png b/zh/01_software/board/examples/images/9a3c47da0975b0226e75453a79a8da2c.png
new file mode 100644
index 0000000..953483d
Binary files /dev/null and b/zh/01_software/board/examples/images/9a3c47da0975b0226e75453a79a8da2c.png differ
diff --git a/zh/01_software/board/examples/images/9f7f9bfaedf0f183b63b59ace6e1569e.png b/zh/01_software/board/examples/images/9f7f9bfaedf0f183b63b59ace6e1569e.png
new file mode 100644
index 0000000..162f245
Binary files /dev/null and b/zh/01_software/board/examples/images/9f7f9bfaedf0f183b63b59ace6e1569e.png differ
diff --git a/zh/01_software/board/examples/images/b097daa09995931e0582cebd8d0191de.png b/zh/01_software/board/examples/images/b097daa09995931e0582cebd8d0191de.png
new file mode 100644
index 0000000..379a051
Binary files /dev/null and b/zh/01_software/board/examples/images/b097daa09995931e0582cebd8d0191de.png differ
diff --git a/zh/01_software/board/examples/images/b7e6e2c2a324b2f5fd97cdafed0a1816.png b/zh/01_software/board/examples/images/b7e6e2c2a324b2f5fd97cdafed0a1816.png
new file mode 100644
index 0000000..0abc855
Binary files /dev/null and b/zh/01_software/board/examples/images/b7e6e2c2a324b2f5fd97cdafed0a1816.png differ
diff --git a/zh/01_software/board/examples/images/c2aafa076e1f78c99c824ed37f29592d.png b/zh/01_software/board/examples/images/c2aafa076e1f78c99c824ed37f29592d.png
new file mode 100644
index 0000000..e1be733
Binary files /dev/null and b/zh/01_software/board/examples/images/c2aafa076e1f78c99c824ed37f29592d.png differ
diff --git a/zh/01_software/board/examples/images/c4bb92a96fd0ba1f4973a27ecd6f60eb.png b/zh/01_software/board/examples/images/c4bb92a96fd0ba1f4973a27ecd6f60eb.png
new file mode 100644
index 0000000..7a7c16c
Binary files /dev/null and b/zh/01_software/board/examples/images/c4bb92a96fd0ba1f4973a27ecd6f60eb.png differ
diff --git a/zh/01_software/board/examples/images/canaan-cover.png b/zh/01_software/board/examples/images/canaan-cover.png
new file mode 100644
index 0000000..0319765
Binary files /dev/null and b/zh/01_software/board/examples/images/canaan-cover.png differ
diff --git a/zh/01_software/board/examples/images/d100e8aff87b92e3903227ace2822675.png b/zh/01_software/board/examples/images/d100e8aff87b92e3903227ace2822675.png
new file mode 100644
index 0000000..fbab0ff
Binary files /dev/null and b/zh/01_software/board/examples/images/d100e8aff87b92e3903227ace2822675.png differ
diff --git a/zh/01_software/board/examples/images/d655177a42702226fff924fd4c150aa2.png b/zh/01_software/board/examples/images/d655177a42702226fff924fd4c150aa2.png
new file mode 100644
index 0000000..76cd3d3
Binary files /dev/null and b/zh/01_software/board/examples/images/d655177a42702226fff924fd4c150aa2.png differ
diff --git a/zh/01_software/board/examples/images/d8f4d2a4c90f58fe67a7343a836f1b18.png b/zh/01_software/board/examples/images/d8f4d2a4c90f58fe67a7343a836f1b18.png
new file mode 100644
index 0000000..fd1063d
Binary files /dev/null and b/zh/01_software/board/examples/images/d8f4d2a4c90f58fe67a7343a836f1b18.png differ
diff --git a/zh/01_software/board/examples/images/db1519081e96825e6bf20f520a28ebb8.png b/zh/01_software/board/examples/images/db1519081e96825e6bf20f520a28ebb8.png
new file mode 100644
index 0000000..501061b
Binary files /dev/null and b/zh/01_software/board/examples/images/db1519081e96825e6bf20f520a28ebb8.png differ
diff --git a/zh/01_software/board/examples/images/demo_dpu_conf_ref_file_02140401.png b/zh/01_software/board/examples/images/demo_dpu_conf_ref_file_02140401.png
new file mode 100755
index 0000000..8bc7f69
Binary files /dev/null and b/zh/01_software/board/examples/images/demo_dpu_conf_ref_file_02140401.png differ
diff --git a/zh/01_software/board/examples/images/dpu_demo_02150402.png b/zh/01_software/board/examples/images/dpu_demo_02150402.png
new file mode 100755
index 0000000..14f679d
Binary files /dev/null and b/zh/01_software/board/examples/images/dpu_demo_02150402.png differ
diff --git a/zh/01_software/board/examples/images/dpu_demo_bind_depth_02150402.png b/zh/01_software/board/examples/images/dpu_demo_bind_depth_02150402.png
new file mode 100755
index 0000000..f39b9aa
Binary files /dev/null and b/zh/01_software/board/examples/images/dpu_demo_bind_depth_02150402.png differ
diff --git a/zh/01_software/board/examples/images/dpu_demo_bind_dump_02150402.png b/zh/01_software/board/examples/images/dpu_demo_bind_dump_02150402.png
new file mode 100755
index 0000000..6fee242
Binary files /dev/null and b/zh/01_software/board/examples/images/dpu_demo_bind_dump_02150402.png differ
diff --git a/zh/01_software/board/examples/images/dpu_demo_dma_02140401.jpg b/zh/01_software/board/examples/images/dpu_demo_dma_02140401.jpg
new file mode 100755
index 0000000..222d1ac
Binary files /dev/null and b/zh/01_software/board/examples/images/dpu_demo_dma_02140401.jpg differ
diff --git a/zh/01_software/board/examples/images/dpu_demo_dpu_02140401.jpg b/zh/01_software/board/examples/images/dpu_demo_dpu_02140401.jpg
new file mode 100755
index 0000000..65c3555
Binary files /dev/null and b/zh/01_software/board/examples/images/dpu_demo_dpu_02140401.jpg differ
diff --git a/zh/01_software/board/examples/images/dpu_demo_real_02140401.jpg b/zh/01_software/board/examples/images/dpu_demo_real_02140401.jpg
new file mode 100755
index 0000000..a0c5bb3
Binary files /dev/null and b/zh/01_software/board/examples/images/dpu_demo_real_02140401.jpg differ
diff --git a/zh/01_software/board/examples/images/dpu_demo_run_02140401.png b/zh/01_software/board/examples/images/dpu_demo_run_02140401.png
new file mode 100755
index 0000000..99511b8
Binary files /dev/null and b/zh/01_software/board/examples/images/dpu_demo_run_02140401.png differ
diff --git a/zh/01_software/board/examples/images/dpu_demo_save_02140401.png b/zh/01_software/board/examples/images/dpu_demo_save_02140401.png
new file mode 100755
index 0000000..514d98f
Binary files /dev/null and b/zh/01_software/board/examples/images/dpu_demo_save_02140401.png differ
diff --git a/zh/01_software/board/examples/images/dpu_demp_vicap_02140401.jpg b/zh/01_software/board/examples/images/dpu_demp_vicap_02140401.jpg
new file mode 100755
index 0000000..217c3de
Binary files /dev/null and b/zh/01_software/board/examples/images/dpu_demp_vicap_02140401.jpg differ
diff --git a/zh/01_software/board/examples/images/e54764629a9e9fb63ec4340d316e4f42.png b/zh/01_software/board/examples/images/e54764629a9e9fb63ec4340d316e4f42.png
new file mode 100644
index 0000000..6f3b714
Binary files /dev/null and b/zh/01_software/board/examples/images/e54764629a9e9fb63ec4340d316e4f42.png differ
diff --git a/zh/01_software/board/examples/images/e5a812cf93366dad91283fce4aea1008.png b/zh/01_software/board/examples/images/e5a812cf93366dad91283fce4aea1008.png
new file mode 100644
index 0000000..49e2d39
Binary files /dev/null and b/zh/01_software/board/examples/images/e5a812cf93366dad91283fce4aea1008.png differ
diff --git a/zh/01_software/board/examples/images/e73b403fe42ae077746ee4e5928a1d86.png b/zh/01_software/board/examples/images/e73b403fe42ae077746ee4e5928a1d86.png
new file mode 100644
index 0000000..9d7824e
Binary files /dev/null and b/zh/01_software/board/examples/images/e73b403fe42ae077746ee4e5928a1d86.png differ
diff --git a/zh/01_software/board/examples/images/f31ea329f14ef6dd6c2a65455b264fa3.png b/zh/01_software/board/examples/images/f31ea329f14ef6dd6c2a65455b264fa3.png
new file mode 100644
index 0000000..d03a6dc
Binary files /dev/null and b/zh/01_software/board/examples/images/f31ea329f14ef6dd6c2a65455b264fa3.png differ
diff --git a/zh/01_software/board/examples/images/f3da90949599f726a60f56b35b69f7cb.png b/zh/01_software/board/examples/images/f3da90949599f726a60f56b35b69f7cb.png
new file mode 100644
index 0000000..bef401a
Binary files /dev/null and b/zh/01_software/board/examples/images/f3da90949599f726a60f56b35b69f7cb.png differ
diff --git a/zh/01_software/board/examples/images/fa40ad5ac1c894a2243c684096dcd8b.png b/zh/01_software/board/examples/images/fa40ad5ac1c894a2243c684096dcd8b.png
new file mode 100755
index 0000000..430ccbe
Binary files /dev/null and b/zh/01_software/board/examples/images/fa40ad5ac1c894a2243c684096dcd8b.png differ
diff --git a/zh/01_software/board/examples/images/image-20230530101801685.png b/zh/01_software/board/examples/images/image-20230530101801685.png
new file mode 100644
index 0000000..d7d5f1a
Binary files /dev/null and b/zh/01_software/board/examples/images/image-20230530101801685.png differ
diff --git a/zh/01_software/board/examples/images/image-20230530102014642.png b/zh/01_software/board/examples/images/image-20230530102014642.png
new file mode 100644
index 0000000..eda0c0a
Binary files /dev/null and b/zh/01_software/board/examples/images/image-20230530102014642.png differ
diff --git a/zh/01_software/board/examples/images/image-20230530102747862.png b/zh/01_software/board/examples/images/image-20230530102747862.png
new file mode 100644
index 0000000..92683f3
Binary files /dev/null and b/zh/01_software/board/examples/images/image-20230530102747862.png differ
diff --git a/zh/01_software/board/examples/images/image-20230530102916366.png b/zh/01_software/board/examples/images/image-20230530102916366.png
new file mode 100644
index 0000000..fe34a36
Binary files /dev/null and b/zh/01_software/board/examples/images/image-20230530102916366.png differ
diff --git a/zh/01_software/board/examples/images/logo.png b/zh/01_software/board/examples/images/logo.png
new file mode 100644
index 0000000..aa48558
Binary files /dev/null and b/zh/01_software/board/examples/images/logo.png differ
diff --git a/zh/01_software/board/examples/images/lvgl_demo_widgets.png b/zh/01_software/board/examples/images/lvgl_demo_widgets.png
new file mode 100644
index 0000000..06d3432
Binary files /dev/null and b/zh/01_software/board/examples/images/lvgl_demo_widgets.png differ
diff --git a/zh/01_software/board/examples/images/modetest_video0_nv12.jpg b/zh/01_software/board/examples/images/modetest_video0_nv12.jpg
new file mode 100644
index 0000000..efec042
Binary files /dev/null and b/zh/01_software/board/examples/images/modetest_video0_nv12.jpg differ
diff --git a/zh/01_software/board/images/2fed09a9dbe48eeeb639b6f977861c77.png b/zh/01_software/board/images/2fed09a9dbe48eeeb639b6f977861c77.png
new file mode 100644
index 0000000..035a5d1
Binary files /dev/null and b/zh/01_software/board/images/2fed09a9dbe48eeeb639b6f977861c77.png differ
diff --git a/zh/01_software/board/images/33d48fa7906e4bf8a0aed4aad7c28178.png b/zh/01_software/board/images/33d48fa7906e4bf8a0aed4aad7c28178.png
new file mode 100644
index 0000000..4a4fc6d
Binary files /dev/null and b/zh/01_software/board/images/33d48fa7906e4bf8a0aed4aad7c28178.png differ
diff --git a/zh/01_software/board/images/3e2358e04601c3e03bf233c84f8b3ec4.png b/zh/01_software/board/images/3e2358e04601c3e03bf233c84f8b3ec4.png
new file mode 100644
index 0000000..60e0ccc
Binary files /dev/null and b/zh/01_software/board/images/3e2358e04601c3e03bf233c84f8b3ec4.png differ
diff --git a/zh/01_software/board/images/4d9f7101ce0225108752d4cae16c9663.png b/zh/01_software/board/images/4d9f7101ce0225108752d4cae16c9663.png
new file mode 100644
index 0000000..5caed3e
Binary files /dev/null and b/zh/01_software/board/images/4d9f7101ce0225108752d4cae16c9663.png differ
diff --git a/zh/01_software/board/images/578b62c404f1f18af8c6aa342e5830b5.jpg b/zh/01_software/board/images/578b62c404f1f18af8c6aa342e5830b5.jpg
new file mode 100644
index 0000000..53bb18e
Binary files /dev/null and b/zh/01_software/board/images/578b62c404f1f18af8c6aa342e5830b5.jpg differ
diff --git a/zh/01_software/board/images/830f7333997768ba1fa01e69aedeeb88.png b/zh/01_software/board/images/830f7333997768ba1fa01e69aedeeb88.png
new file mode 100644
index 0000000..4b253e6
Binary files /dev/null and b/zh/01_software/board/images/830f7333997768ba1fa01e69aedeeb88.png differ
diff --git a/zh/01_software/board/images/84c28ea8eb1de88fe5b4a1b2c122767d.jpg b/zh/01_software/board/images/84c28ea8eb1de88fe5b4a1b2c122767d.jpg
new file mode 100644
index 0000000..b324144
Binary files /dev/null and b/zh/01_software/board/images/84c28ea8eb1de88fe5b4a1b2c122767d.jpg differ
diff --git a/zh/01_software/board/images/8e91f1cc85daee080e3de5f875542bc8.png b/zh/01_software/board/images/8e91f1cc85daee080e3de5f875542bc8.png
new file mode 100644
index 0000000..f86f548
Binary files /dev/null and b/zh/01_software/board/images/8e91f1cc85daee080e3de5f875542bc8.png differ
diff --git a/zh/01_software/board/images/a3ee5b66a56b295c092465fec74ed086.png b/zh/01_software/board/images/a3ee5b66a56b295c092465fec74ed086.png
new file mode 100644
index 0000000..b684b1f
Binary files /dev/null and b/zh/01_software/board/images/a3ee5b66a56b295c092465fec74ed086.png differ
diff --git a/zh/01_software/board/images/bcb6636268b91758f87ff54523251eeb.png b/zh/01_software/board/images/bcb6636268b91758f87ff54523251eeb.png
new file mode 100644
index 0000000..83c699c
Binary files /dev/null and b/zh/01_software/board/images/bcb6636268b91758f87ff54523251eeb.png differ
diff --git a/zh/01_software/board/images/canaan-cover.png b/zh/01_software/board/images/canaan-cover.png
new file mode 100644
index 0000000..0319765
Binary files /dev/null and b/zh/01_software/board/images/canaan-cover.png differ
diff --git a/zh/01_software/board/images/cc18bccbf8054dde022db7f9c07df307.png b/zh/01_software/board/images/cc18bccbf8054dde022db7f9c07df307.png
new file mode 100644
index 0000000..aca0ab6
Binary files /dev/null and b/zh/01_software/board/images/cc18bccbf8054dde022db7f9c07df307.png differ
diff --git a/zh/01_software/board/images/cc2f950fcc6a9b2e93042ddae87bc18f.png b/zh/01_software/board/images/cc2f950fcc6a9b2e93042ddae87bc18f.png
new file mode 100755
index 0000000..bb3e598
Binary files /dev/null and b/zh/01_software/board/images/cc2f950fcc6a9b2e93042ddae87bc18f.png differ
diff --git a/zh/01_software/board/images/cee49715351f6dd3496baf19af1262ed.png b/zh/01_software/board/images/cee49715351f6dd3496baf19af1262ed.png
new file mode 100644
index 0000000..ced9664
Binary files /dev/null and b/zh/01_software/board/images/cee49715351f6dd3496baf19af1262ed.png differ
diff --git a/zh/01_software/board/images/da6d48091ee0af8107a63cde01a2b75b.png b/zh/01_software/board/images/da6d48091ee0af8107a63cde01a2b75b.png
new file mode 100644
index 0000000..d7f383d
Binary files /dev/null and b/zh/01_software/board/images/da6d48091ee0af8107a63cde01a2b75b.png differ
diff --git a/zh/01_software/board/images/image-memconfig_part.png b/zh/01_software/board/images/image-memconfig_part.png
new file mode 100755
index 0000000..3b28c9f
Binary files /dev/null and b/zh/01_software/board/images/image-memconfig_part.png differ
diff --git a/zh/01_software/board/images/image-menuconfig_spi_nor_part.png b/zh/01_software/board/images/image-menuconfig_spi_nor_part.png
new file mode 100755
index 0000000..f321e2b
Binary files /dev/null and b/zh/01_software/board/images/image-menuconfig_spi_nor_part.png differ
diff --git a/zh/01_software/board/images/image-non_crypt.png b/zh/01_software/board/images/image-non_crypt.png
new file mode 100755
index 0000000..a7d1da1
Binary files /dev/null and b/zh/01_software/board/images/image-non_crypt.png differ
diff --git a/zh/01_software/board/images/image-spi_nand_part.png b/zh/01_software/board/images/image-spi_nand_part.png
new file mode 100755
index 0000000..49a63b3
Binary files /dev/null and b/zh/01_software/board/images/image-spi_nand_part.png differ
diff --git a/zh/01_software/board/images/image-spi_nor_default_part.png b/zh/01_software/board/images/image-spi_nor_default_part.png
new file mode 100755
index 0000000..e4a3c04
Binary files /dev/null and b/zh/01_software/board/images/image-spi_nor_default_part.png differ
diff --git a/zh/01_software/board/images/logo.png b/zh/01_software/board/images/logo.png
new file mode 100644
index 0000000..aa48558
Binary files /dev/null and b/zh/01_software/board/images/logo.png differ
diff --git "a/zh/01_software/board/images/sd_emmc\351\273\230\350\256\244\345\210\206\345\214\272.png" "b/zh/01_software/board/images/sd_emmc\351\273\230\350\256\244\345\210\206\345\214\272.png"
new file mode 100755
index 0000000..8b45b3c
Binary files /dev/null and "b/zh/01_software/board/images/sd_emmc\351\273\230\350\256\244\345\210\206\345\214\272.png" differ
diff --git "a/zh/01_software/board/middleware/K230_openblas_\345\274\200\345\217\221\344\275\277\347\224\250\346\214\207\345\215\227.md" "b/zh/01_software/board/middleware/K230_openblas_\345\274\200\345\217\221\344\275\277\347\224\250\346\214\207\345\215\227.md"
new file mode 100755
index 0000000..4aea03b
--- /dev/null
+++ "b/zh/01_software/board/middleware/K230_openblas_\345\274\200\345\217\221\344\275\277\347\224\250\346\214\207\345\215\227.md"
@@ -0,0 +1,256 @@
+# K230 OpenBLAS开发指南
+
+
+
+版权所有©2023北京嘉楠捷思信息技术有限公司
+
+
+
+## 免责声明
+
+您购买的产品、服务或特性等应受北京嘉楠捷思信息技术有限公司(“本公司”,下同)及其关联公司的商业合同和条款的约束,本文档中描述的全部或部分产品、服务或特性可能不在您的购买或使用范围之内。除非合同另有约定,本公司不对本文档的任何陈述、信息、内容的正确性、可靠性、完整性、适销性、符合特定目的和不侵权提供任何明示或默示的声明或保证。除非另有约定,本文档仅作为使用指导参考。
+
+由于产品版本升级或其他原因,本文档内容将可能在未经任何通知的情况下,不定期进行更新或修改。
+
+## 商标声明
+
+、“嘉楠”和其他嘉楠商标均为北京嘉楠捷思信息技术有限公司及其关联公司的商标。本文档可能提及的其他所有商标或注册商标,由各自的所有人拥有。
+
+**版权所有 © 2023北京嘉楠捷思信息技术有限公司。保留一切权利。**
+非经本公司书面许可,任何单位和个人不得擅自摘抄、复制本文档内容的部分或全部,并不得以任何形式传播。
+
+
+
+## 目录
+
+[TOC]
+
+## 前言
+
+### 概述
+
+本文档主要介绍K230 OpenBLAS。
+
+### 读者对象
+
+本文档(本指南)主要适用于以下人员:
+
+- 技术支持工程师
+- 软件开发工程师
+
+### 缩略词定义
+
+| 简称 | 说明 |
+|------|-------------------------------------------------------------|
+| OpenBLAS | Open Basic Linear Algebra Subprograms |
+
+### 修订记录
+
+| 文档版本号 | 修改说明 | 修改者 | 日期 |
+| ---------- | -------- | ---------- | ---------- |
+| V1.0 | 初版 | 算法部 | 2023-05-30 |
+
+## 1.OpenBLAS简介
+
+OpenBLAS 是一个基于BSD许可(开源)发行的优化BLAS计算库。BLAS(Basic Linear Algebra Subprograms,基础线性代数程序集)是一个应用程序接口(API)标准,用以规范发布基础线性代数操作的数值库(如矢量或矩阵乘法),OpenBLAS是BLAS标准的一种具体实现。
+在SDK中,已包含预先交叉编译好的OpenBLAS库(位于`k230_sdk/src/big/utils/lib/openblas/`路径下),用户直接使用该静态库编译自己的可执行程序即可。
+
+## 2.测试用例编译
+
+注意:
+>本节讲解如何通过SDK中预设的OpenBLAS静态库,来进行可执行程序的编译。SDK中已包含多个基于OpenBLAS实现的可执行程序编译示例(位于`k230_sdk/src/big/utils/examples/openblas/`路径下),本节基于这些示例来进行讲解。
+
+`k230_sdk/src/big/utils/examples/openblas/`路径下的目录结构说明如下:
+
+```text
+|-- 1_openblas_level1 # OpenBLAS示例1
+| |-- CMakeLists.txt # OpenBLAS示例1的CMake配置文件
+| `-- openblas_level1.cpp
+|-- 2_openblas_level2
+| |-- CMakeLists.txt
+| `-- openblas_level2.cpp
+|-- 3_openblas_level3
+| |-- CMakeLists.txt
+| `-- openblas_level3.cpp
+|-- 4_fortran_example
+| |-- CMakeLists.txt
+| `-- openblas_fortran.cpp
+|-- CMakeLists.txt # 总体CMake配置文件
+|-- build_app.sh # 总体编译脚本
+|-- cmake # 默认CMaek配置
+| |-- Riscv64.cmake
+| `-- link.lds
+```
+
+首先,在`k230_sdk/src/big/utils/examples/openblas/`路径下,运行`build_app.sh`文件:
+
+```shell
+./build_app.sh
+```
+
+在终端中出现如下提示,说明可执行程序编译成功:
+
+```text
+Install the project...
+-- Install configuration: "Release"
+-- Installing: /data/zhanglimin/code_kmodel_export_build_inference_k230/k230_sdk/src/big/utils/examples/openblas/out/bin/1_openblas_level1.elf
+-- Installing: /data/zhanglimin/code_kmodel_export_build_inference_k230/k230_sdk/src/big/utils/examples/openblas/out/bin/2_openblas_level2.elf
+-- Installing: /data/zhanglimin/code_kmodel_export_build_inference_k230/k230_sdk/src/big/utils/examples/openblas/out/bin/3_openblas_level3.elf
+-- Installing: /data/zhanglimin/code_kmodel_export_build_inference_k230/k230_sdk/src/big/utils/examples/openblas/out/bin/4_openblas_fortran.elf
+```
+
+最后,在`k230_sdk/src/big/utils/examples/openblas/out/bin`文件夹中即包含了编译好的所有elf文件:
+
+- `1_openblas_level1.elf`
+- `2_openblas_level2.elf`
+- `3_openblas_level3.elf`
+- `4_openblas_fortran.elf`
+
+## 3.测试用例运行演示
+
+### 3.1 level_1测试用例
+
+运行方式及输出结果示例如下:
+
+```shell
+msh /sharefs/bin_openblas>./1_openblas_level1.elf
+*********************************************************
+This is the result:
+4 7 11 14
+*********************************************************
+This is the reference:
+4 7 11 14
+{Test PASS}.
+```
+
+### 3.2 level_2测试用例
+
+运行方式及输出结果示例如下:
+
+```shell
+msh /sharefs/bin_openblas>./2_openblas_level2.elf
+*********************************************************
+This is the result:
+20 40 10 20 30 60
+*********************************************************
+This is the reference:
+20 40 10 20 30 60
+{Test PASS}.
+```
+
+### 3.3 level_3测试用例
+
+运行方式及输出结果示例如下:
+
+```shell
+msh /sharefs/bin_openblas>./3_openblas_level3.elf
+*********************************************************
+This is the result:
+7 10 15 22
+*********************************************************
+This is the reference:
+7 10 15 22
+{Test PASS}.
+```
+
+### 3.4 Fortran接口测试用例
+
+运行方式及输出结果示例如下:
+
+```shell
+msh /sharefs/bin_openblas>./4_openblas_fortran.elf
+m=2,n=3,k=4,alpha=1.200000,beta=0.001000,sizeofc=6
+This is matrix A
+
+1.000000 2.000000 3.000000 1.000000 2.000000 3.000000 1.000000 2.000000
+This is matrix B
+
+1.000000 2.000000 3.000000 1.000000 2.000000 3.000000 1.000000 2.000000 3.000000 1.000000 2.000000 3.000000
+*********************************************************
+This is the result:
+16.801 18.002 18.003 16.801 15.602 22.803
+*********************************************************
+This is the reference:
+16.801 18.002 18.003 16.801 15.602 22.803
+{Test PASS}.
+```
+
+## 4.OpenBLAS交叉编译
+
+注意:
+>尽管SDK中已包含预先交叉编译好的OpenBLAS库(位于`k230_sdk/src/big/utils/lib/openblas/`路径下),感兴趣的用户也可以自己对OpenBLAS进行交叉编译,得到适配K230的OpenBLAS静态库。
+
+### 4.1 OpenBLAS编译环境搭建
+
+#### 4.1.1 Git代码下载
+
+首先使用git获取OpenBLAS仓库,由于OpenBLAS来自于Github,因此克隆速度慢为正常现象,请耐心等待:
+
+```shell
+git clone https://github.com/xianyi/OpenBLAS.git
+```
+
+OpenBLAS中存在着很多版本,由于 0.3.21 版本与最新分支相比缺少部分特性,这里我们选用当前最新
+提交:
+
+```shell
+git checkout e9a911fb9f011c886077e68eab81c48817cdb782
+```
+
+#### 4.1.2 patch补丁包应用
+
+注意:
+>patch补丁包在SDK中的路径为`k230_sdk/src/big/rt-smart/userapps/openblas/`。
+
+首先,在OpenBLAS根目录下,新建`patch`目录,并将patch补丁包拷贝至`patch`目录下,放置好的文件夹目录结构示例如下所示:
+
+```text
+├── appveyor.yml
+├── azure-pipelines.yml
+├── BACKERS.md
+├── benchmark
+├── cblas.h
+...
+├── common_lapack.h
+├── common_level1.h
+├── common_level2.h
+├── common_level3.h
+├── common_linux.h
+├── common_loongarch64.h
+├── common_macro.h
+|-- patch # OpenBLAS 的 补 丁 包
+| |-- 0001-****.patch
+| |-- 0002-****.patch
+| |-- 0003-****.patch
+...
+| |-- 0009-****.patch
+| |-- 0010-****.patch
+| |-- 0011-****.patch
+...
+...
+...
+├── utest
+└── version.h
+```
+
+在OpenBLAS根目录执行以下命令,应用补丁:
+
+```shell
+git am ./patch/*.patch
+```
+
+### 4.3 OpenBLAS编译
+
+进入 OpenBLAS 的根目录,执行以下命令,进行编译:
+
+```shell
+# 注意:工具链路径会随开发者具体环境不同,路径前缀会有所不同,仅供参考。
+make TARGET=C908V HOSTCC=gcc BINARY=64 FC=k230_sdk/toolchain/riscv64-linux-musleabi_for_x86_64-pc-linux-gnu/bin/riscv64-unknown-linux-musl-gfortran CC=k230_sdk/toolchain/riscv64-linux-musleabi_for_x86_64-pc-linux-gnu/bin/riscv64-unknownlinux-musl-gcc NOFORTRAN=0 USE_THREAD=0 LIBPREFIX="./libopenblas" LAPACKE="NO_LAPACKE=0" INTERFACE64=0 NO_STATIC=0 NO_SHARED=1 -Wimplicit-functiondeclaration
+```
+
+编译完成后,将编译好的库安装到指定文件夹中,本示例安装到`./install`文件夹中:
+
+```shell
+# 注意:可以按照自己的需求, 修改相应的安装路径。
+make PREFIX=./install NO_STATIC=0 NO_SHARED=1 install
+```
diff --git "a/zh/01_software/board/middleware/K230_opencv_\345\274\200\345\217\221\344\275\277\347\224\250\346\214\207\345\215\227.md" "b/zh/01_software/board/middleware/K230_opencv_\345\274\200\345\217\221\344\275\277\347\224\250\346\214\207\345\215\227.md"
new file mode 100755
index 0000000..9f2ec4e
--- /dev/null
+++ "b/zh/01_software/board/middleware/K230_opencv_\345\274\200\345\217\221\344\275\277\347\224\250\346\214\207\345\215\227.md"
@@ -0,0 +1,321 @@
+# K230 OpenCV开发指南
+
+
+
+版权所有©2023北京嘉楠捷思信息技术有限公司
+
+
+
+## 免责声明
+
+您购买的产品、服务或特性等应受北京嘉楠捷思信息技术有限公司(“本公司”,下同)及其关联公司的商业合同和条款的约束,本文档中描述的全部或部分产品、服务或特性可能不在您的购买或使用范围之内。除非合同另有约定,本公司不对本文档的任何陈述、信息、内容的正确性、可靠性、完整性、适销性、符合特定目的和不侵权提供任何明示或默示的声明或保证。除非另有约定,本文档仅作为使用指导参考。
+
+由于产品版本升级或其他原因,本文档内容将可能在未经任何通知的情况下,不定期进行更新或修改。
+
+## 商标声明
+
+、“嘉楠”和其他嘉楠商标均为北京嘉楠捷思信息技术有限公司及其关联公司的商标。本文档可能提及的其他所有商标或注册商标,由各自的所有人拥有。
+
+**版权所有 © 2023北京嘉楠捷思信息技术有限公司。保留一切权利。**
+非经本公司书面许可,任何单位和个人不得擅自摘抄、复制本文档内容的部分或全部,并不得以任何形式传播。
+
+
+
+## 目录
+
+[TOC]
+
+## 前言
+
+### 概述
+
+本文档主要介绍K230 OpenCV。
+
+### 读者对象
+
+本文档(本指南)主要适用于以下人员:
+
+- 技术支持工程师
+- 软件开发工程师
+
+### 缩略词定义
+
+| 简称 | 说明 |
+|------|-------------------------------------------------------------|
+| OpenCV | Open Source Computer Vision Library |
+
+### 修订记录
+
+| 文档版本号 | 修改说明 | 修改者 | 日期 |
+| ---------- | -------- | ---------- | ---------- |
+| V1.0 | 初版 | 算法部 | 2023-05-30 |
+
+## 1.OpenCV简介
+
+OpenCV的全称是Open Source Computer Vision Library,是一个跨平台的计算机视觉库。OpenCV是由英特尔公司发起并参与开发,以BSD许可证授权发行,可以在商业和研究领域中免费使用。OpenCV可用于开发实时的图像处理、计算机视觉以及模式识别程序。
+嘉楠科技提供了针对K230优化的升级版OpenCV加速库,相比于原始版本OpenCV,可大幅减少OpenCV算子的推理时间。对比示例如下:
+
+| 算子名称 |K230+原始版OpenCV | K230+升级版OpenCV |
+| --- | --- | --- |
+| 计算积分图(inter) | 34.5ms | 7.7ms |
+| 仿射变换 (warpaffine) | 391.1ms |34.7ms |
+
+注意:
+>上述算子推理时间均在K230大核+1.6GHZ的条件下测试。
+>计算积分图(inter)算子:输入图像为1280x1080灰度图;积分图类型为32位浮点数。
+>仿射变换 (warpaffine)算子:输入图像为1280x1080灰度图;顺时针旋转15度,缩放0.6倍;目标图像为1280x1080灰度图;
+
+此外,SDK中已包含预先交叉编译好的升级版OpenCV加速库(位于`k230_sdk/src/big/utils/lib/opencv/`路径下),用户直接使用该静态库编译自己的可执行程序即可。
+
+## 2.测试用例编译示例
+
+本节讲解如何通过SDK中预设的OpenCV静态库,来进行可执行程序的编译。SDK的已包含多个基于OpenCV实现的可执行程序编译示例(位于`k230_sdk/src/big/utils/examples/opencv/`路径下),本节基于这些示例来进行讲解。该路径下的目录结构说明如下:
+
+```text
+|-- 1_opencv_calcHist # OpenCV示例1
+| |-- CMakeLists.txt # OpenCV示例1的CMake配置文件
+| `-- opencv_calcHist.cpp # OpenCV示例1的源码
+|-- 2_opencv_threshold # OpenCV示例2
+| |-- CMakeLists.txt # OpenCV示例2的CMake配置文件
+| `-- opencv_threshold.cpp # OpenCV示例2的源码
+|-- 3_opencv_findContours
+| |-- CMakeLists.txt
+| `-- opencv_findContours.cpp
+|-- 4_opencv_features2d
+| |-- CMakeLists.txt
+| `-- opencv_features2d.cpp
+|-- 5_opencv_objdetect
+| |-- CMakeLists.txt
+| `-- opencv_objdetect.cpp
+|-- CMakeLists.txt # 总体CMake配置文件
+|-- build_app.sh # 总体编译脚本
+|-- cmake # 默认CMaek配置
+| |-- Riscv64.cmake
+| `-- link.lds
+`-- resources # OpenCV示例所需的所有输入图片及数据
+ |-- 1.bmp
+ ...
+ |-- a.jpg
+```
+
+首先,运行`build_app.sh`文件:
+
+```shell
+./build_app.sh
+```
+
+在终端中出现如下提示,说明可执行程序编译成功:
+
+```shell
+Install the project...
+-- Install configuration: "Release"
+-- Installing: /data/zhanglimin/code_kmodel_export_build_inference_k230/k230_sdk/src/big/utils/examples/opencv/out/bin/1_opencv_calcHist.elf
+-- Installing: /data/zhanglimin/code_kmodel_export_build_inference_k230/k230_sdk/src/big/utils/examples/opencv/out/bin/2_opencv_threshold.elf
+-- Installing: /data/zhanglimin/code_kmodel_export_build_inference_k230/k230_sdk/src/big/utils/examples/opencv/out/bin/3_opencv_findContours.elf
+-- Installing: /data/zhanglimin/code_kmodel_export_build_inference_k230/k230_sdk/src/big/utils/examples/opencv/out/bin/4_opencv_features2d.elf
+-- Installing: /data/zhanglimin/code_kmodel_export_build_inference_k230/k230_sdk/src/big/utils/examples/opencv/out/bin/5_opencv_objdetect.elf
+```
+
+最后,在`k230_sdk/src/big/utils/examples/opencv/out/bin`文件夹中即包含了编译好的所有elf文件:
+
+- `1_opencv_calcHist.elf`
+- `2_opencv_threshold.elf`
+- `3_opencv_findContours.elf`
+- `4_opencv_features2d.elf`
+- `5_opencv_objdetect.elf`
+
+## 3.测试用例运行示例
+
+注意:
+>所有测试用例运行所需的输入图像数据,均位于SDK的`k230_sdk/src/big/utils/examples/opencv/resources`路径下。
+
+### 3.1 opencv_calcHist
+
+`1_opencv_calcHist`测试用例的运行方式如下:
+
+```text
+msh /sharefs/bin_opencv>./1_opencv_calcHist.elf
+```
+
+`1_opencv_calcHist`测试用例的运行结果示例如下:
+
+
+
+其中,左侧为原图像,右侧为3个channel的像素直方图信息。
+
+### 3.2 opencv_threshold
+
+`2_opencv_threshold`测试用例的运行方式如下:
+
+```text
+msh /sharefs/bin_opencv>./2_opencv_threshold.elf
+```
+
+`2_opencv_threshold`测试用例的运行结果示例如下:
+
+
+其中,左侧为原图像,右侧为阈值化后的图像。
+
+### 3.3 opencv_findContours
+
+`3_opencv_findContours`测试用例的运行方式如下:
+
+```text
+msh /sharefs/bin_opencv>./3_opencv_findContours.elf
+```
+
+`3_opencv_findContours`测试用例的运行结果示例如下:
+
+
+其中,左侧为原图像,右侧为处理后的轮廓信息图。
+
+### 3.4 opencv_features2d
+
+`4_opencv_features2d`测试用例的运行方式如下:
+
+```text
+msh /sharefs/bin_opencv>./4_opencv_features2d.elf
+```
+
+`4_opencv_features2d`测试用例的运行结果示例如下:
+
+其中,左侧为原图像,右侧为处理后的特征提取结果图。
+
+### 3.5 opencv_objdetect
+
+`5_opencv_objdetect`测试用例的运行方式如下:
+
+```text
+msh /sharefs/bin_opencv>./5_opencv_objdetect.elf
+```
+
+`5_opencv_objdetect`测试用例的运行结果示例如下:
+
+
+其中,左侧为原图像,右侧为眼睛和人脸的目标检测结果图。
+
+## 4.原始版本OpenCV库的交叉编译及使用
+
+注意:
+>在第1~3章节中,均基于嘉楠科技提供的K230 加速版OpenCV库进行讲解。若用户希望使用原生的OpenCV库进行应用程序的开发,那可以参考本节内容:首先,通过交叉编译得到原始版本OpenCV的静态库;然后,基于原始版本OpenCV的静态库,进行可执行程序的编译。
+
+### 4.1 下载OpenCV源码
+
+首先,使用Github获取OpenCV仓库,由于OpenCV来自于Github,因此克隆速度慢为正常现象,请耐心等待:
+
+```shell
+git clone https://github.com/opencv/opencv.git
+```
+
+OpenCV中存在着很多版本,这里我们选用最新的版本4.6.0:
+
+```shel
+# 切换为v4.6.0分支
+git checkout tags/4.6.0 -b v4.6.0-branch
+```
+
+### 4.2 应用patch补丁包
+
+patch补丁包在SDK中的路径为:`k230_sdk/src/big/rt-smart/userapps/opencv/v4.6.0`。
+
+首先,在OpenCV根目录下新建`patch`文件夹,并将补丁包放入`patch`文件夹中。放置好的目录结构示例如下:
+
+```text
+|-- 3rdparty
+|-- patch # opencv 的 补 丁 包
+| |-- 0001-****.patch
+| |-- 0002-****.patch
+| |-- 0003-****.patch
+...
+| |-- 0011-****.patch
+| |-- 0017-****.patch
+| |-- 0018-****.patch
+|-- CMakeLists.txt
+...
+|-- include
+|-- modules
+|-- platforms
+|-- samples
+```
+
+然后,在OpenCV根目录下执行以下命令应用补丁:
+
+``` shell
+git am ./patch/*.patch
+```
+
+此时,打完补丁的OpenCV目录结构示例如下:
+
+```text
+|-- 3rdparty
+|-- patch
+|-- CMakeLists.txt
+...
+|-- apps
+|-- build.sh
+|-- cmake
+|-- data
+|-- doc
+|-- include
+|-- modules
+|-- platforms
+| |-- android
+...
+| |-- rt_smart
+| | `-- riscv64-gcc.toolchain.cmake # rt_smart平台的编译配置文件
+| |-- scripts
+| |-- semihosting
+| |-- wince
+| |-- winpack_dldt
+| `-- winrt
+|-- samples
+`-- version
+```
+
+### 4.3 交叉编译OpenCV静态库
+
+首先,检查`build.sh`文件中的工具链路径是否正确:
+
+```shell
+# 注意:`toolchain_path` 会随开发者具体环境不同,路径前缀会有所不同,仅供参考。
+toolchain_path=~/.tools/gnu_gcc/riscv64-linux-musleabi_for_x86_64-pc-linux-gnu/bin
+c_compiler=${toolchain_path}/riscv64-unknown-linux-musl-gcc
+cxx_compiler=${toolchain_path}/riscv64-unknown-linux-musl-g++
+
+cmake .. -G "Unix Makefiles" -DCMAKE_TOOLCHAIN_FILE="../platforms/rt_smart/riscv64-rvv-gcc.toolchain.cmake" \
+-DCMAKE_C_COMPILER=$c_compiler \
+-DCMAKE_CXX_COMPILER=$cxx_compiler
+```
+
+然后,创建文件夹`build`,在`build`目录中执行以下命令即可:
+
+``` shell
+source ../build.sh
+make -j$(nproc)
+make install
+```
+
+在编译过程中,若终端未出现告警信息,则说明编译成功,编译完成的产物在`build/install`中,其中包含了原始版本OpenCV的静态库文件。
+
+### 4.4 编译可执行程序
+
+本小节通过对第2节中的测试用例进行修改,来说明如何基于原始版本OpenCV库来实现可执行程序的编译。
+首先,把原始版本的OpenCV库拷贝到`k230_sdk/src/big/utils/lib/`下并将文件夹命名为`opencv_rtt`。
+然后,删除加速版OpenCV库,并将原始版本OpenCV库进行软链接:
+
+```shell
+cd k230_sdk/src/big/utils/lib/opencv_rtt
+rm opencv
+ln -s opencv_rtt opencv
+```
+
+然后,修改各个示例文件夹内(例如`1_opencv_calcHist`文件夹)下`CMakeLists.txt`文件,对链接的静态库内容进行修改,删除对`csi_cv`库的链接:
+
+```shell
+# 加速版OpenCV库,采用如下链接设置
+target_link_libraries(${bin} opencv_imgcodecs opencv_imgproc opencv_core libjpeg-turbo libopenjp2 libpng libtiff libwebp zlib csi_cv)
+# 原始版OpenCV库,改为如下链接设置
+target_link_libraries(${bin} opencv_imgcodecs opencv_imgproc opencv_core libjpeg-turbo libopenjp2 libpng libtiff libwebp zlib)
+```
+
+最后,其余步骤(如程序的编译及运行)均与加速版本OpenCV保持一致。
diff --git a/zh/01_software/board/middleware/images/canaan-cover.png b/zh/01_software/board/middleware/images/canaan-cover.png
new file mode 100755
index 0000000..0319765
Binary files /dev/null and b/zh/01_software/board/middleware/images/canaan-cover.png differ
diff --git a/zh/01_software/board/middleware/images/logo.png b/zh/01_software/board/middleware/images/logo.png
new file mode 100755
index 0000000..aa48558
Binary files /dev/null and b/zh/01_software/board/middleware/images/logo.png differ
diff --git a/zh/01_software/board/middleware/images/test_opencv_calcHist.png b/zh/01_software/board/middleware/images/test_opencv_calcHist.png
new file mode 100755
index 0000000..b2277ac
Binary files /dev/null and b/zh/01_software/board/middleware/images/test_opencv_calcHist.png differ
diff --git a/zh/01_software/board/middleware/images/test_opencv_features2d.png b/zh/01_software/board/middleware/images/test_opencv_features2d.png
new file mode 100755
index 0000000..ce9e197
Binary files /dev/null and b/zh/01_software/board/middleware/images/test_opencv_features2d.png differ
diff --git a/zh/01_software/board/middleware/images/test_opencv_findContours.png b/zh/01_software/board/middleware/images/test_opencv_findContours.png
new file mode 100755
index 0000000..c17aa19
Binary files /dev/null and b/zh/01_software/board/middleware/images/test_opencv_findContours.png differ
diff --git a/zh/01_software/board/middleware/images/test_opencv_objdetect.png b/zh/01_software/board/middleware/images/test_opencv_objdetect.png
new file mode 100755
index 0000000..6698e5d
Binary files /dev/null and b/zh/01_software/board/middleware/images/test_opencv_objdetect.png differ
diff --git a/zh/01_software/board/middleware/images/test_opencv_threshold.png b/zh/01_software/board/middleware/images/test_opencv_threshold.png
new file mode 100755
index 0000000..078cde6
Binary files /dev/null and b/zh/01_software/board/middleware/images/test_opencv_threshold.png differ
diff --git "a/zh/01_software/board/mpp/K230_Camera_Sensor\351\200\202\351\205\215\346\214\207\345\215\227.md" "b/zh/01_software/board/mpp/K230_Camera_Sensor\351\200\202\351\205\215\346\214\207\345\215\227.md"
new file mode 100644
index 0000000..f420253
--- /dev/null
+++ "b/zh/01_software/board/mpp/K230_Camera_Sensor\351\200\202\351\205\215\346\214\207\345\215\227.md"
@@ -0,0 +1,390 @@
+# K230 Camera Sensor适配指南
+
+
+
+版权所有©2023北京嘉楠捷思信息技术有限公司
+
+
+
+## 免责声明
+
+您购买的产品、服务或特性等应受北京嘉楠捷思信息技术有限公司(“本公司”,下同)及其关联公司的商业合同和条款的约束,本文档中描述的全部或部分产品、服务或特性可能不在您的购买或使用范围之内。除非合同另有约定,本公司不对本文档的任何陈述、信息、内容的正确性、可靠性、完整性、适销性、符合特定目的和不侵权提供任何明示或默示的声明或保证。除非另有约定,本文档仅作为使用指导参考。
+
+由于产品版本升级或其他原因,本文档内容将可能在未经任何通知的情况下,不定期进行更新或修改。
+
+## 商标声明
+
+、“嘉楠”和其他嘉楠商标均为北京嘉楠捷思信息技术有限公司及其关联公司的商标。本文档可能提及的其他所有商标或注册商标,由各自的所有人拥有。
+
+**版权所有 © 2023北京嘉楠捷思信息技术有限公司。保留一切权利。**
+非经本公司书面许可,任何单位和个人不得擅自摘抄、复制本文档内容的部分或全部,并不得以任何形式传播。
+
+
+
+## 目录
+
+[TOC]
+
+## 前言
+
+### 概述
+
+本文档主要描述K230平台Camera Sensor框架以及如何新增支持一款新的Camera Sensor。
+
+### 读者对象
+
+本文档(本指南)主要适用于以下人员:
+
+- 技术支持工程师
+- 软件开发工程师
+
+### 缩略词定义
+
+| 简称 | 说明 |
+| ---- | ---- |
+| | |
+| | |
+
+### 修订记录
+
+| 文档版本号 | 修改说明 | 修改者 | 日期 |
+|---|---|---|---|
+| V1.0 | 初版 | 汪成根 | 2023-05-30 |
+| | | | |
+| | | | |
+
+## 1. 概述
+
+本文档主要描述K230平台Camera Sensor基本框架以及如何新增支持一款新的Camera Sensor。
+
+K230平台支持多种接口类型的sensor,我们以当前最常用的MIPI CSI接口Sensor为例进行说明。Sensor与主控平台的硬件连接示意图如下:
+
+
+
+主控通过I2C接口下发配置寄存器控制sensor的工作方式,sensor通过MIPI CSI接口将图像数据发送至主控SOC。
+
+## 2. Camera Sensor框架
+
+### 2.1 框架简介
+
+Camera Sensor框架如图2-1所示,最底层是sensor驱动层
+
+
+
+图2-1 camera sensor框架
+
+从上到下依次是:媒体接口层,驱动层以及硬件层
+
+- 媒体接口层:该层对上提供kd_mpi_sensor_xxx接口给外部模块操作和访问sensor设备,对下通过ioctl操作具体的sensor设备
+- 驱动层:该层包括sensor公共操作接口具体的sensor设备驱动。公共操作接口主要是ioctl操作命令和sensor i2c读写接口,sensor驱动主要提供设备节点以及操作接口的实现。这部分也是sensor适配的主要工作。
+- 硬件层:对应各个具体的sensor硬件
+
+## 3. Sensor适配准备工作
+
+用户在适配新的sensor之前需要做以下一些准备工作:
+
+1. 从正规渠道获取 Sensor datasheet、初始化序列。
+1. 查看 Sensor datasheet 和相关应用手册,特别关注 Sensor 曝光、增益控制方法,不同模式下曝光和增益的限制,长曝光实现方法,黑电平值,bayer 数据输出顺序等。
+1. 跟 Sensor 厂家索要所需模式初始化序列,了解各序列的数据数率,Sensor 输出总的宽高,精确的帧率是多少等。
+1. 确认 Sensor 控制接口是 I2C、SPI 还是其他接口,Sensor 的设备地址可以通过硬件设置。对于多个摄像头的场景,sensor 尽量不要复用 I2C 总线。不同场景的Sensor IO 电平可能是 1.8V 或者 3.3V,设计时需要保保证 sensor 的 IO 电平与SOC 对应的 GPIO 供电电压一致。如 sensor 电平是 1.8V,则用于 sensor 控制的GPIO,如 Reset,I2C,PRDN,需要使用 1.8V 供电。
+1. 确认 Sensor 输出数据接口和协议类型。当前仅支持MIPI CSI接口。
+1. 确认 wdr mode 是 VC、DT 或者 DOL 等。
+1. 确认不同时序是否需要图像裁剪。
+
+## 4. Sensor适配示例
+
+本节将按照如何增加支持一个新的camera sensor的步骤来进行详细描述。
+
+这里以ov9732驱动作为示例进行说明,对应的驱动文件源码路径如下:
+
+```shell
+src/big/mpp/kernel/sensor/src/ov9732_drv.c
+```
+
+### 4.1 定义支持的sensor类型
+
+系统支持的Sensor类型是由如下枚举变量定义:
+
+```c
+typedef enum {
+ OV_OV9732_MIPI_1920X1080_30FPS_10BIT_LINEAR,
+ OV_OV9732_MIPI_1920X1080_30FPS_10BIT_HDR,
+ OV_OV9732_MIPI_1280X720_30FPS_10BIT_LINEAR,
+ OV_OV9286_MIPI_1920X1080_30FPS_10BIT_LINEAR,
+ OV_OV9286_MIPI_1920X1080_30FPS_10BIT_HDR,
+ OV_OV9286_MIPI_1280X720_30FPS_10BIT_LINEAR_IR,
+ OV_OV9286_MIPI_1280X720_30FPS_10BIT_LINEAR_SPECKLE,
+ IMX335_MIPI_2LANE_RAW12_1920X1080_30FPS_LINEAR,
+ IMX335_MIPI_2LANE_RAW12_2592X1944_30FPS_LINEAR,
+ IMX335_MIPI_4LANE_RAW12_2592X1944_30FPS_LINEAR,
+ SENSOR_TYPE_MAX,
+} k_vicap_sensor_type;
+```
+
+用户需要增加新的sensor支持类型时,首先需要在这里增加对应类型的定义,**该类型是应用程序获取sensor配置的唯一标志**
+
+### 4.2 sensor驱动适配
+
+sensor驱动适配在整个环节中最重要的环节,用户可以通过拷贝现有的sensor驱动文件来修改,其中关于sensor的AE相关寄存器配置和计算方式需要查看对应的手册或者寻求专业人事协助。
+
+#### 4.2.1 定义sensor寄存器配置列表
+
+sensor寄存器配置由数据类型 k_sensor_reg_list 定义:
+
+```c
+typedef struct {
+ k_u16 reg_addr;
+ k_u8 reg_val;
+} k_sensor_reg_list;
+```
+
+以下是ov9732的寄存器配置列表
+
+```c
+static k_sensor_reg_list ov9732_mipi2lane_720p_30fps_linear[] = {
+ {0x0103, 0x01},
+ {0x0100, 0x00},
+
+ ......
+
+ {0x400b, 0xc0},
+ {REG_NULL, 0x00},
+};
+```
+
+#### 4.2.2 定义sensor支持的模式
+
+sensor的模式参数由数据类型k_sensor_mode 定义
+
+```c
+typedef struct {
+ k_u32 index;
+ k_vicap_sensor_type sensor_type;
+ k_sensor_size size;
+ k_u32 fps;
+ k_u32 hdr_mode;
+ k_u32 stitching_mode;
+ k_u32 bit_width;
+ k_sensor_data_compress compress;
+ k_u32 bayer_pattern;
+ k_sensor_mipi_info mipi_info;
+ k_sensor_ae_info ae_info;
+ k_sensor_reg_list *reg_list;
+} k_sensor_mode;
+```
+
+以下是ov9732的支持的模式
+
+```c
+static k_sensor_mode ov9732_mode_info[] = {
+ ......
+
+ {
+ .index = 2,
+ .sensor_type = OV_OV9732_MIPI_1280X720_30FPS_10BIT_LINEAR,
+ .size = {
+ .bounds_width = 1280,
+ .bounds_height = 720,
+ .top = 0,
+ .left = 0,
+ .width = 1280,
+ .height = 720,
+ },
+ .fps = 30000,
+ .hdr_mode = SENSOR_MODE_LINEAR,
+ .bit_width = 10,
+ .bayer_pattern = BAYER_BGGR,
+ .mipi_info = {
+ .csi_id = 0,
+ .mipi_lanes = 1,
+ .data_type = 0x2B, //RAW10
+ },
+ .reg_list = ov9732_mipi2lane_720p_30fps_linear,
+ },
+
+}
+```
+
+#### 4.2.3 实现sensor操作接口
+
+sensor的操作接口由数据类型k_sensor_function定义,用户根据实际情况实现相关的操作接口,不是所有接口都必须实现。
+
+```c
+typedef struct {
+ k_s32 (*sensor_power) (void *ctx, k_s32 on);
+ k_s32 (*sensor_init) (void *ctx, k_sensor_mode mode);
+ k_s32 (*sensor_get_chip_id)(void *ctx, k_u32 *chip_id);
+ k_s32 (*sensor_get_mode)(void *ctx, k_sensor_mode *mode);
+ k_s32 (*sensor_set_mode)(void *ctx, k_sensor_mode mode);
+ k_s32 (*sensor_enum_mode)(void *ctx, k_sensor_enum_mode *enum_mode);
+ k_s32 (*sensor_get_caps)(void *ctx, k_sensor_caps *caps);
+ k_s32 (*sensor_conn_check)(void *ctx, k_s32 *conn);
+ k_s32 (*sensor_set_stream)(void *ctx, k_s32 enable);
+ k_s32 (*sensor_get_again)(void *ctx, k_sensor_gain *gain);
+ k_s32 (*sensor_set_again)(void *ctx, k_sensor_gain gain);
+ k_s32 (*sensor_get_dgain)(void *ctx, k_sensor_gain *gain);
+ k_s32 (*sensor_set_dgain)(void *ctx, k_sensor_gain gain);
+ k_s32 (*sensor_get_intg_time)(void *ctx, k_sensor_intg_time *time);
+ k_s32 (*sensor_set_intg_time)(void *ctx, k_sensor_intg_time time);
+ k_s32 (*sensor_get_exp_parm)(void *ctx, k_sensor_exposure_param *exp_parm);
+ k_s32 (*sensor_set_exp_parm)(void *ctx, k_sensor_exposure_param exp_parm);
+ k_s32 (*sensor_get_fps)(void *ctx, k_u32 *fps);
+ k_s32 (*sensor_set_fps)(void *ctx, k_u32 fps);
+ k_s32 (*sensor_get_isp_status)(void *ctx, k_sensor_isp_status *staus);
+ k_s32 (*sensor_set_blc)(void *ctx, k_sensor_blc blc);
+ k_s32 (*sensor_set_wb)(void *ctx, k_sensor_white_balance wb);
+ k_s32 (*sensor_get_tpg)(void *ctx, k_sensor_test_pattern *tpg);
+ k_s32 (*sensor_set_tpg)(void *ctx, k_sensor_test_pattern tpg);
+ k_s32 (*sensor_get_expand_curve)(void *ctx, k_sensor_compand_curve *curve);
+ k_s32 (*sensor_get_otp_data)(void *ctx, void *data);
+} k_sensor_function;
+```
+
+以下是ov9732的支持的模式
+
+```c
+ .sensor_func = {
+ .sensor_power = ov9732_sensor_power_on,
+ .sensor_init = ov9732_sensor_init,
+ .sensor_get_chip_id = ov9732_sensor_get_chip_id,
+ .sensor_get_mode = ov9732_sensor_get_mode,
+ .sensor_set_mode = ov9732_sensor_set_mode,
+ .sensor_enum_mode = ov9732_sensor_enum_mode,
+ .sensor_get_caps = ov9732_sensor_get_caps,
+ .sensor_conn_check = ov9732_sensor_conn_check,
+ .sensor_set_stream = ov9732_sensor_set_stream,
+ .sensor_get_again = ov9732_sensor_get_again,
+ .sensor_set_again = ov9732_sensor_set_again,
+ .sensor_get_dgain = ov9732_sensor_get_dgain,
+ .sensor_set_dgain = ov9732_sensor_set_dgain,
+ .sensor_get_intg_time = ov9732_sensor_get_intg_time,
+ .sensor_set_intg_time = ov9732_sensor_set_intg_time,
+ .sensor_get_exp_parm = ov9732_sensor_get_exp_parm,
+ .sensor_set_exp_parm = ov9732_sensor_set_exp_parm,
+ .sensor_get_fps = ov9732_sensor_get_fps,
+ .sensor_set_fps = ov9732_sensor_set_fps,
+ .sensor_get_isp_status = ov9732_sensor_get_isp_status,
+ .sensor_set_blc = ov9732_sensor_set_blc,
+ .sensor_set_wb = ov9732_sensor_set_wb,
+ .sensor_get_tpg = ov9732_sensor_get_tpg,
+ .sensor_set_tpg = ov9732_sensor_set_tpg,
+ .sensor_get_expand_curve = ov9732_sensor_get_expand_curve,
+ .sensor_get_otp_data = ov9732_sensor_get_otp_data,
+ },
+```
+
+#### 4.2.4 定义sensor驱动结构体
+
+sensor驱动结构体由 struct sensor_driver_dev 定义,主要包括sensor I2C配置信息,sensor驱动名称以及sensor操作集合
+
+```c
+struct sensor_driver_dev {
+ k_sensor_i2c_info i2c_info;
+ k_u8 *sensor_name;
+ k_sensor_function sensor_func;
+ k_sensor_mode *sensor_mode;
+ k_sensor_ae_info ae_info;
+ k_s32 pwd_gpio;
+ k_s32 reset_gpio;
+};
+```
+
+ov9732驱动结构体定义及初始化内容如下:
+
+```c
+struct sensor_driver_dev ov9732_sensor_drv = {
+ .i2c_info = {
+ .i2c_bus = NULL,
+ .i2c_name = "i2c1",
+ .slave_addr = 0x36,
+ },
+ .sensor_name = "ov9732",
+ .sensor_func = {
+ .sensor_power = ov9732_sensor_power_on,
+ .sensor_init = ov9732_sensor_init,
+ .sensor_get_chip_id = ov9732_sensor_get_chip_id,
+ .sensor_get_mode = ov9732_sensor_get_mode,
+ .sensor_set_mode = ov9732_sensor_set_mode,
+ ......
+ },
+};
+```
+
+#### 4.2.5 更新sensor驱动列表
+
+将上一节定义的sensor驱动结构体添加到sensor_drv_list数组中。
+当前系统支持的sensor列表如下:
+
+```c
+struct sensor_driver_dev *sensor_drv_list[] = {
+ &ov9732_sensor_drv,
+ &ov9286_sensor_drv,
+ &imx335_sensor_drv,
+};
+```
+
+### 4.3 更新sensor配置信息列表
+
+sensor配置信息有结构体k_vicap_sensor_info定义:
+
+```shell
+typedef struct {
+ const char *sensor_name; /*sensor名字*/
+ const char *calib_file; /*sensor标定文件名*/
+ k_u16 width; /*sensor输出图像宽度*/
+ k_u16 height; /*sensor输出图像高度*/
+ k_vicap_csi_num csi_num; /*sensor硬件连接使用的CSI总线标号*/
+ k_vicap_mipi_lanes mipi_lanes; /*sensor硬件连接使用的MIPI LANE个数*/
+ k_vicap_data_source source_id; /*数据源ID*/
+ k_bool is_3d_sensor; /*是否为3D sensor*/
+
+ k_vicap_mipi_phy_freq phy_freq; /*MIPI PHY速率*/
+ k_vicap_csi_data_type data_type; /*CSI数据类型*/
+ k_vicap_hdr_mode hdr_mode; /*HDR模式*/
+ k_vicap_vi_flash_mode flash_mode; /*flash模式选择*/
+ k_vicap_vi_first_frame_sel first_frame;
+ k_u16 glitch_filter;
+ k_vicap_sensor_type sensor_type; /*sensor类型*/
+} k_vicap_sensor_info;
+```
+
+以下是ov9732对应的配置信息:
+
+```shell
+const k_vicap_sensor_info sensor_info_list[] = {
+ {
+ "ov9732",
+ "ov9732",
+ 1920,
+ 1080,
+ VICAP_CSI0,
+ VICAP_MIPI_1LANE,
+ VICAP_SOURCE_CSI0,
+ K_FALSE,
+ VICAP_MIPI_PHY_800M,
+ VICAP_CSI_DATA_TYPE_RAW10,
+ VICAP_LINERA_MODE,
+ VICAP_FLASH_DISABLE,
+ VICAP_VI_FIRST_FRAME_FS_TR0,
+ 0,
+ OV_OV9732_MIPI_1920X1080_30FPS_10BIT_LINEAR
+ },
+```
+
+用户每增加一个sensor配置模式,就需要在sensor_info_list这个结构体中增加一项对应模式的配置。
+
+### 4.4 增加sensor配置文件
+
+当前SDK版本sensor配置文件包括xml文件和json文件,文件存放路径如下:
+
+```shell
+src/big/mpp/userapps/src/sensor/config/
+```
+
+以下是ov9732对应的配置文件:
+
+```shell
+ov9732.xml ov9732_auto.json ov9732_manual.json
+```
+
+对于新增加的sensor,可以通过拷贝修改现有文件实现支持,其中的calibration和tuning参数可以通过相关工具修改导出。
diff --git "a/zh/01_software/board/mpp/K230_DMA_API\345\217\202\350\200\203.md" "b/zh/01_software/board/mpp/K230_DMA_API\345\217\202\350\200\203.md"
new file mode 100644
index 0000000..0da2e30
--- /dev/null
+++ "b/zh/01_software/board/mpp/K230_DMA_API\345\217\202\350\200\203.md"
@@ -0,0 +1,1207 @@
+# K230 DMA API参考
+
+
+
+版权所有©2023北京嘉楠捷思信息技术有限公司
+
+
+
+## 免责声明
+
+您购买的产品、服务或特性等应受北京嘉楠捷思信息技术有限公司(“本公司”,下同)及其关联公司的商业合同和条款的约束,本文档中描述的全部或部分产品、服务或特性可能不在您的购买或使用范围之内。除非合同另有约定,本公司不对本文档的任何陈述、信息、内容的正确性、可靠性、完整性、适销性、符合特定目的和不侵权提供任何明示或默示的声明或保证。除非另有约定,本文档仅作为使用指导参考。
+
+由于产品版本升级或其他原因,本文档内容将可能在未经任何通知的情况下,不定期进行更新或修改。
+
+## 商标声明
+
+、“嘉楠”和其他嘉楠商标均为北京嘉楠捷思信息技术有限公司及其关联公司的商标。本文档可能提及的其他所有商标或注册商标,由各自的所有人拥有。
+
+**版权所有 © 2023北京嘉楠捷思信息技术有限公司。保留一切权利。**
+非经本公司书面许可,任何单位和个人不得擅自摘抄、复制本文档内容的部分或全部,并不得以任何形式传播。
+
+
+
+## 目录
+
+[TOC]
+
+## 前言
+
+### 概述
+
+本文档主要介绍 K230 GSDMA 软件的设计,设计内容主要包括 GSDMA 驱动框架及软件实现。
+
+### 读者对象
+
+本文档(本指南)主要适用于以下人员:
+
+- 技术支持工程师
+- 软件开发工程师
+
+### 缩略词定义
+
+| 简称 | 说明 |
+|------|------------------------------|
+| GDMA | Graphic Direct Memory Access |
+| SDMA | System Direct Memory Access |
+
+### 修订记录
+
+| 文档版本号 | 修改说明 | 修改者 | 日期 |
+|------------|-----------------------------------------------------------|--------|-----------|
+| V1.0 | 初版 | 刘孙涛 | 2023/3/7 |
+| V1.1 | 修改了绑定模式的部分描述; 增加了释放帧号的函数接口描述。 | 刘孙涛 | 2023/3/31 |
+| V1.2 | 更换了图像地址的数据结构; 增加了帧号透传功能。 | 刘孙涛 | 2023/4/26 |
+| V1.3 | 增加了 buffer 可配置的功能 | 刘孙涛 | 2023/5/31 |
+
+## 1. 概述
+
+### 1.1 概述
+
+GSDMA:DMA 全称 Direct Memory Access,即直接存储器访问,将数据从一个地址空间复制到另一个地址空间,提供在存储器和存储器之间的高速数据传输。GDMA 全称 Graphic Direct Memory Access,负责将内存中的图像复制到另一块内存中,同时可以完成图像的旋转和镜像等功能。SDMA 全称 System Direct Memory Access,负责将内存中的数据复制到另一块内存中,即传统意义上的 DMA。
+
+软件代码将 GSDMA 硬件的各个功能以 API 的方式提供给使用者使用,帮助用户快速实现图像传输、旋转、镜像、2D 功能及数据传输功能。同时实现了模块状态信息统计等功能。
+
+### 1.2 功能描述
+
+dma 驱动调用流程如下图所示:
+
+
+
+将 dma 硬件抽象为一个设备,八个通道,其中,通道 0\~3 是 gdma 通道,通道 4\~7 是 sdma 通道。
+
+#### 1.2.1 gdma
+
+用户通过 gdma 来实现图像的旋转镜像工作,主要调用流程如下:
+
+1. 进行 dma 设备属性的配置;
+1. 启动 dma 设备。在调用此函数以后驱动会自动申请 VB 空间作为目的地址的数据缓冲区;
+1. 进行 gdma 通道属性的配置;
+1. 启动 gdma 通道;
+1. 用户在用户态申请 VB 空间作为源数据的数据缓冲区,调用 kd_mpi_dma_send_frame 发送数据的源地址给 gdma;
+1. 驱动会将源地址中的数据传输到步骤二中申请的目的地址数据缓冲区中;
+1. 用户调用 kd_mpi_dma_get_frame 获取目的地址中的数据地址。
+
+#### 1.2.2 sdma
+
+用户通过 sdma 来实现数据搬移工作,主要调用流程如下:
+
+1. 进行 dma 设备属性的配置;
+1. 启动 dma 设备。在调用此函数以后驱动会自动申请 VB 空间作为目的地址的数据缓冲区;
+1. 进行 sdma 通道属性的配置;
+1. 启动 sdma 通道;
+1. 用户在用户态申请 VB 空间作为源数据的数据缓冲区,调用 kd_mpi_dma_send_frame 发送数据的源地址给 sdma;
+1. 驱动会将源地址中的数据传输到步骤二中申请的目的地址数据缓冲区中;
+1. 用户调用 kd_mpi_dma_get_frame 获取目的地址中的数据地址。
+
+## 2. API 参考
+
+### 2.1 DMA 使用
+
+该功能模块提供以下API:
+
+- [kd_mpi_dma_set_dev_attr](#211-kd_mpi_dma_set_dev_attr)
+- [kd_mpi_dma_get_dev_attr](#212-kd_mpi_dma_get_dev_attr)
+- [kd_mpi_dma_start_dev](#213-kd_mpi_dma_start_dev)
+- [kd_mpi_dma_stop_dev](#214-kd_mpi_dma_stop_dev)
+- [kd_mpi_dma_set_chn_attr](#215-kd_mpi_dma_set_chn_attr)
+- [kd_mpi_dma_get_chn_attr](#216-kd_mpi_dma_get_chn_attr)
+- [kd_mpi_dma_start_chn](#217-kd_mpi_dma_start_chn)
+- [kd_mpi_dma_stop_chn](#218-kd_mpi_dma_stop_chn)
+- [kd_mpi_dma_send_frame](#219-kd_mpi_dma_send_frame)
+- [kd_mpi_dma_get_frame](#2110-kd_mpi_dma_get_frame)
+- [kd_mpi_dma_release_frame](#2111-kd_mpi_dma_release_frame)
+
+#### 2.1.1 kd_mpi_dma_set_dev_attr
+
+【描述】
+
+配置 dma 设备属性
+
+【语法】
+
+k_s32 kd_mpi_dma_set_dev_attr(k_dma_dev_attr_t \*attr);
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|---------------------------|-----------|
+| attr | dma 设备属性结构体指针。 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+【芯片差异】
+
+无。
+
+【需求】
+
+- 头文件:mpi_dma_api.h
+- 库文件:libdma.a
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+[k_dma_dev_attr_t](#314-k_dma_dev_attr_t)
+
+#### 2.1.2 kd_mpi_dma_get_dev_attr
+
+【描述】
+
+获取已经配置的 dma 设备属性。
+
+【语法】
+
+k_s32 kd_mpi_dma_get_dev_attr(k_dma_dev_attr_t \*attr);
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|------------------------|-----------|
+| attr | dma 设备属性结构体指针 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_dma_api.h
+- 库文件:libdma.a
+
+【注意】
+
+需要在配置 dma 设备属性之后才可以获取 dma 设备属性。
+
+【举例】
+
+无
+
+【相关主题】
+
+[k_dma_dev_attr_t](#314-k_dma_dev_attr_t)
+
+#### 2.1.3 kd_mpi_dma_start_dev
+
+【描述】
+
+启动 dma 设备。
+
+【语法】
+
+k_s32 kd_mpi_dma_start_dev();
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|------|-----------|
+| 无 | 无 | 无 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_dma_api.h
+- 库文件:libdma.a
+
+【注意】
+
+- 需要配置 dma 设备属性之后才可以调用此函数启动 dma
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+#### 2.1.4 kd_mpi_dma_stop_dev
+
+【描述】
+
+停止 dma 设备。
+
+【语法】
+
+kd_mpi_dma_stop_dev();
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|------|-----------|
+| 无 | 无 | 无 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_dma_api.h
+- 库文件:libdma.a
+
+【注意】
+
+- 只有启动 dma 设备之后才可以调用此函数来停止 dma 设备。
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+#### 2.1.5 kd_mpi_dma_set_chn_attr
+
+【描述】
+
+配置 dma 通道属性。
+
+【语法】
+
+k_s32 kd_mpi_dma_set_chn_attr(k_u8 chn_num, k_dma_chn_attr_u \*attr);
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|----------------------------------------------------------------------------------------------------------------------------------|-----------|
+| chn_num | 通道号 | 输入 |
+| attr | dma 通道属性,该参数是一个联合体,可以选择配置 gdma 通道属性,也可以选择配置 sdma 通道属性。通道 0\~3 是 gdma,通道 4\~7 是 sdma | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_dma_api.h
+- 库文件:libdma.a
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+[k_dma_chn_attr_u](#315-k_dma_chn_attr_u)
+
+#### 2.1.6 kd_mpi_dma_get_chn_attr
+
+【描述】
+
+获取已经配置的 dma 通道属性。
+
+【语法】
+
+k_s32 kd_mpi_dma_get_chn_attr(k_u8 chn_num, k_dma_chn_attr_u \*attr);
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|----------------------------------------------------------------------------------------------------------------------------------|-----------|
+| chn_num | 通道号 | 输入 |
+| attr | dma 通道属性,该参数是一个联合体,可以选择获取 gdma 通道属性,也可以选择获取 sdma 通道属性。通道 0\~3 是 gdma,通道 4\~7 是 sdma | 输出 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_dma_api.h
+- 库文件:libdma.a
+
+【注意】
+
+- 需要在配置 dma 通道属性之后才可以获取 dma 通道属性。
+
+【举例】
+
+无
+
+【相关主题】
+
+[k_dma_chn_attr_u](#315-k_dma_chn_attr_u)
+
+#### 2.1.7 kd_mpi_dma_start_chn
+
+【描述】
+
+启动 dma 通道。
+
+【语法】
+
+k_s32 kd_mpi_dma_start_chn(k_u8 chn_num);
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|----------|-----------|
+| chn_num | 通道号。 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_dma_api.h
+- 库文件:libdma.a
+
+【注意】
+
+- 只有在配置启动 dma 设备,配置 dma 通道属性之后才可以启动 dma 通道。
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+#### 2.1.8 kd_mpi_dma_stop_chn
+
+【描述】
+
+暂停 dma 通道
+
+【语法】
+
+k_s32 kd_mpi_dma_stop_chn(k_u8 chn_num);
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|----------|-----------|
+| chn_num | 通道号。 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_dma_api.h
+- 库文件:libdma.a
+
+【注意】
+
+- 只有启动 dma 通道之后才可以调用此函数来停止 dma 通道。
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+#### 2.1.9 kd_mpi_dma_send_frame
+
+【描述】
+
+从用户空间发送数据到目的地址。
+
+【语法】
+
+k_s32 kd_mpi_dma_send_frame(k_u8 chn_num, k_video_frame_info \*df_info, k_s32 millisec);
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|-----------------------------------------------------------------------------------------------------------------------------------------------------------------------|-----------|
+| chn_num | 通道号。 | 输入 |
+| df_info | 发送数据的地址信息。 | 输入 |
+| millisec | 等待时间。 当此参数设置为 -1 时,阻塞; 当此参数设置为 0 时,非阻塞; 当此参数设置为大于 0 的值时,会等待相应时间直到成功发送数据,如果超时后仍未成功发送,返回失败。 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_dma_api.h
+- 库文件:libdma.a
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+[k_video_frame_info](#316-k_video_frame_info)
+
+#### 2.1.10 kd_mpi_dma_get_frame
+
+【描述】
+
+获取 dma 搬运后的数据。
+
+【语法】
+
+k_s32 kd_mpi_dma_get_frame(k_u8 chn_num, k_video_frame_info \*df_info, k_s32 millisec);
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|-----------------------------------------------------------------------------------------------------------------------------------------------------------------------|-----------|
+| chn_num | 通道号。 | 输入 |
+| df_info | 获取数据的地址信息。 | 输出 |
+| millisec | 等待时间。 当此参数设置为 -1 时,阻塞; 当此参数设置为 0 时,非阻塞; 当此参数设置为大于 0 的值时,会等待相应时间知道成功获取数据,如果超时后仍未成功发送,返回失败。 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_dma_api.h
+- 库文件:libdma.a
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+[k_video_frame_info](#316-k_video_frame_info)
+
+#### 2.1.11 kd_mpi_dma_release_frame
+
+【描述】
+
+释放获取的 dma 数据。
+
+【语法】
+
+k_s32 kd_mpi_dma_release_frame(k_u8 chn_num, k_video_frame_info \*df_info);
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|----------------|-----------|
+| chn_num | 通道号。 | 输入 |
+| df_info | 要释放的数据。 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_dma_api.h
+- 库文件:libdma.a
+
+【注意】
+
+- 当前设计中 dma 输出 buffer 为 3,如果获取 3 帧数据都没有调用此函数进行释放,那么无法继续输入数据。因此,用户应该在获取数据,使用完之后及时释放。
+
+【举例】
+
+无
+
+【相关主题】
+
+[k_video_frame_info](#316-k_video_frame_info)
+
+## 3 数据类型
+
+### 3.1 公共数据类型
+
+#### 3.1.1 DMA_MAX_DEV_NUMS
+
+【说明】
+
+DMA 最大设备数
+
+【定义】
+
+```c
+#define DMA_MAX_DEV_NUMS (1)
+```
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+无
+
+#### 3.1.2 DMA_MAX_CHN_NUMS
+
+【说明】
+
+DMA 最大通道数
+
+【定义】
+
+\#define DMA_MAX_CHN_NUMS (8)
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+无
+
+#### 3.1.3 k_dma_mode_e
+
+【说明】
+
+定义 dma 工作模式。
+
+【定义】
+
+```c
+typedef enum
+{
+ DMA_BIND,
+ DMA_UNBIND,
+} k_dma_mode_e;
+```
+
+【成员】
+
+| 成员名称 | 描述 |
+|----------|------------|
+| BIND | 绑定模式。 |
+| UNBIND | 非绑定模式 |
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+[k_gdma_chn_attr_t](#324-k_gdma_chn_attr_t)
+[k_sdma_chn_attr_t](#333-k_sdma_chn_attr_t)
+
+#### 3.1.4 k_dma_dev_attr_t
+
+【说明】
+
+定义 dma 设备属性。
+
+【定义】
+
+```c
+typedef struct
+{
+ k_u8 burst_len;
+ k_u8 outstanding;
+ k_bool ckg_bypass;
+} k_dma_dev_attr_t;
+```
+
+【成员】
+
+| 成员名称 | 描述 |
+|-------------|--------------------------|
+| burst_len | 配置 dma 的 burst length |
+| outstanding | 配置 dma outstanding |
+| ckg_bypass | 配置 clock gate bypass |
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+[kd_mpi_dma_set_dev_attr](#211-kd_mpi_dma_set_dev_attr)
+[kd_mpi_dma_get_dev_attr](#212-kd_mpi_dma_get_dev_attr)
+
+#### 3.1.5 k_dma_chn_attr_u
+
+【说明】
+
+定义 dma 通道属性。
+
+【定义】
+
+```c
+typedef union
+{
+ k_gdma_chn_attr_t gdma_attr;
+ k_sdma_chn_attr_t sdma_attr;
+} k_dma_chn_attr_u;
+```
+
+【成员】
+
+| 成员名称 | 描述 |
+|------------|------------------------|
+| gdma_attr | gdma 通道属性 |
+| sdma_attr | sdma 通道属性 |
+| ckg_bypass | 配置 clock gate bypass |
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+[k_gdma_chn_attr_t](#324-k_gdma_chn_attr_t)
+[k_sdma_chn_attr_t](#333-k_sdma_chn_attr_t)
+[kd_mpi_dma_set_chn_attr](#215-kd_mpi_dma_set_chn_attr)
+[kd_mpi_dma_get_chn_attr](#216-kd_mpi_dma_get_chn_attr)
+
+#### 3.1.6 k_video_frame_info
+
+【说明】
+
+定义 dma 数据地址。
+
+【定义】
+
+```c
+typedef struct
+{
+ k_video_frame v_frame; /**< Video picture frame */
+ k_u32 pool_id; /**< VB pool ID */
+ k_mod_id mod_id; /**< Logical unit for generating video frames */
+} k_video_frame_info;
+```
+
+【成员】
+
+| 成员名称 | 描述 |
+|----------|--------------------------|
+| v_frame | 时间戳,绑定模式下有效。 |
+| pool_id | 数据 vb 池的 pool id。 |
+| mod_id | 模块 id |
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+[kd_mpi_dma_send_frame](#219-kd_mpi_dma_send_frame)
+[kd_mpi_dma_get_frame](#2110-kd_mpi_dma_get_frame)
+[kd_mpi_dma_release_frame](#2111-kd_mpi_dma_release_frame)
+
+#### 3.1.7 k_video_frame
+
+【说明】
+
+定义 dma 数据地址。使用公用的数据结构 k_video_frame,只使用到了其中的一部分成员。
+
+【定义】
+
+```c
+typedef struct
+{
+ k_u64 phys_addr[3];
+ k_u64 virt_addr[3];
+ k_u32 time_ref;
+ k_u64 pts;
+} k_video_frame;
+```
+
+【成员】
+
+| 成员名称 | 描述 |
+|-----------|----------------------------------------------------------------------------------------------------------------------------------------------|
+| phys_addr | 图像的物理地址,如果是单通道图像,只需配置第一个物理地址;如果是双通道图像,只需配置前两个物理地址;如果是三通道图像,需要配置三个物理地址。 |
+| virt_addr | 图像的虚拟地址,如果是单通道图像,只需配置第一个虚拟地址;如果是双通道图像,只需配置前两个虚拟地址;如果是三通道图像,需要配置三个虚拟地址。 |
+| time_ref | 透传的帧号,在绑定模式下,由前级输入 |
+| pts | 透传的时间戳,在绑定模式下,由前级输入 |
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+[kd_mpi_dma_send_frame](#219-kd_mpi_dma_send_frame)
+[kd_mpi_dma_get_frame](#2110-kd_mpi_dma_get_frame)
+
+### 3.2 gdma 通道数据类型
+
+该模块有如下数据类型
+
+- [GDMA_MAX_CHN_NUMS](#321-gdma_max_chn_nums)
+- [k_gdma_rotation_e](#322-k_gdma_rotation_e)
+- [k_pixel_format_dma_e](#323-k_pixel_format_dma_e)
+- [k_gdma_chn_attr_t](#324-k_gdma_chn_attr_t)
+
+#### 3.2.1 GDMA_MAX_CHN_NUMS
+
+【说明】
+
+GDMA 最大通道数
+
+【定义】
+
+```c
+define GDMA_MAX_CHN_NUMS (4)
+```
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+无
+
+#### 3.2.2 k_gdma_rotation_e
+
+【说明】
+
+定义 gdma 通道旋转角度。
+
+【定义】
+
+```c
+typedef enum
+{
+ DEGREE_0, /**< Rotate 0 degrees */
+ DEGREE_90, /**< Rotate 90 degrees */
+ DEGREE_180, /**< Rotate 180 degrees */
+ DEGREE_270, /**< Rotate 270 degrees */
+} k_gdma_rotation_e;
+```
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+[k_gdma_chn_attr_t](#324-k_gdma_chn_attr_t)
+
+#### 3.2.3 k_pixel_format_dma_e
+
+【说明】
+
+定义 gdma 图像格式。
+
+【定义】
+
+```c
+typedef enum
+{
+ DMA_PIXEL_FORMAT_RGB_444 = 0,
+ DMA_PIXEL_FORMAT_RGB_555,
+ DMA_PIXEL_FORMAT_RGB_565,
+ DMA_PIXEL_FORMAT_RGB_888,
+
+ DMA_PIXEL_FORMAT_BGR_444,
+ DMA_PIXEL_FORMAT_BGR_555,
+ DMA_PIXEL_FORMAT_BGR_565,
+ DMA_PIXEL_FORMAT_BGR_888,
+
+ DMA_PIXEL_FORMAT_ARGB_1555,
+ DMA_PIXEL_FORMAT_ARGB_4444,
+ DMA_PIXEL_FORMAT_ARGB_8565,
+ DMA_PIXEL_FORMAT_ARGB_8888,
+
+ DMA_PIXEL_FORMAT_ABGR_1555,
+ DMA_PIXEL_FORMAT_ABGR_4444,
+ DMA_PIXEL_FORMAT_ABGR_8565,
+ DMA_PIXEL_FORMAT_ABGR_8888,
+
+ DMA_PIXEL_FORMAT_YVU_PLANAR_420_8BIT,
+ DMA_PIXEL_FORMAT_YVU_PLANAR_420_10BIT,
+ DMA_PIXEL_FORMAT_YVU_PLANAR_420_16BIT,
+ DMA_PIXEL_FORMAT_YVU_PLANAR_444_8BIT,
+ DMA_PIXEL_FORMAT_YVU_PLANAR_444_10BIT,
+
+ DMA_PIXEL_FORMAT_YUV_PLANAR_420_8BIT,
+ DMA_PIXEL_FORMAT_YUV_PLANAR_420_10BIT,
+ DMA_PIXEL_FORMAT_YUV_PLANAR_420_16BIT,
+
+ DMA_PIXEL_FORMAT_YVU_SEMIPLANAR_420_8BIT,
+ DMA_PIXEL_FORMAT_YVU_SEMIPLANAR_420_10BIT,
+ DMA_PIXEL_FORMAT_YVU_SEMIPLANAR_420_16BIT,
+
+ DMA_PIXEL_FORMAT_YUV_SEMIPLANAR_420_8BIT,
+ DMA_PIXEL_FORMAT_YUV_SEMIPLANAR_420_10BIT,
+ DMA_PIXEL_FORMAT_YUV_SEMIPLANAR_420_16BIT,
+
+ DMA_PIXEL_FORMAT_YUV_400_8BIT,
+ DMA_PIXEL_FORMAT_YUV_400_10BIT,
+ DMA_PIXEL_FORMAT_YUV_400_12BIT,
+ DMA_PIXEL_FORMAT_YUV_400_16BIT,
+
+ DMA_PIXEL_FORMAT_YUV_PACKED_444_8BIT,
+ DMA_PIXEL_FORMAT_YUV_PACKED_444_10BIT,
+
+ /* SVP data format */
+ DMA_PIXEL_FORMAT_BGR_888_PLANAR,
+} k_pixel_format_dma_e;
+```
+
+#### 3.2.4 k_gdma_chn_attr_t
+
+【说明】
+
+定义 gdma 通道属性。
+
+【定义】
+
+```c
+typedef struct
+{
+ k_u8 buffer_num;
+ k_gdma_rotation_e rotation;
+ k_bool x_mirror;
+ k_bool y_mirror;
+ k_u16 width;
+ k_u16 height;
+ k_u16 src_stride[3];
+ k_u16 dst_stride[3];
+ k_dma_mode_e work_mode;
+ k_pixel_format_dma_e pixel_format;
+} k_gdma_chn_attr_t;
+```
+
+【成员】
+
+| 成员名称 | 描述 |
+|--------------|--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------|
+| buffer_num | gdma 通道 buffer 数量,至少为 1。 |
+| rotation | gdma 通道旋转角度。 |
+| x_mirror | gdma 通道是否进行水平镜像 |
+| y_mirror | gdma 通道是否进行垂直镜像 |
+| width | gdma 通道宽度,以像素为单位。 |
+| height | gdma 通道高度,以像素为单位。 |
+| src_stride | gdma 源数据 stride。如果图像格式是单通道模式,只需配置`src_stride[0]`;如果图像格式是双通道模式,需要配置`src_stride[0]`,`src_stride[1]`;如果图像格式是三通道模式,需要配置 `src_stride[0]`,`src_stride[1]`,`src_stride[2]`。 |
+| dst_stride | gdma目的数据 stride。如果图像格式是单通道模式,只需配置`dst_stride[0]`;如果图像格式是双通道模式,需要配置`dst_stride[0]`,`dst_stride[1]`;如果图像格式是三通道模式,需要配置 `dst_stride[0]`,`dst_stride[1]`,`dst_stride[2]`。 |
+| work_mode | 工作模式,可以选择绑定模式或者非绑定模式。 |
+| pixel_format | 图像格式。 |
+
+【注意事项】
+
+- 无。
+
+【相关数据类型及接口】
+
+- [kd_mpi_dma_set_chn_attr](#215-kd_mpi_dma_set_chn_attr)
+- [kd_mpi_dma_get_chn_attr](#216-kd_mpi_dma_get_chn_attr)
+
+### 3.3 sdma 通道数据类型
+
+本模块有如下数据类型
+
+- [SDMA_MAX_CHN_NUMS](#331-sdma_max_chn_nums)
+- [k_sdma_data_mode_e](#332-k_sdma_data_mode_e)
+- [k_sdma_chn_attr_t](#333-k_sdma_chn_attr_t)
+
+#### 3.3.1 SDMA_MAX_CHN_NUMS
+
+【说明】
+
+SDMA 最大通道数
+
+【定义】
+
+```c
+#define SDMA_MAX_CHN_NUMS (4)
+```
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+无
+
+#### 3.3.2 k_sdma_data_mode_e
+
+【说明】
+
+定义 sdma 通道传输数据的模式
+
+【定义】
+
+```c
+typedef enum
+{
+ DIMENSION1,
+ DIMENSION2,
+} k_sdma_data_mode_e;
+```
+
+【成员】
+
+| 成员名称 | 描述 |
+|------------|-------------------|
+| DIMENSION1 | 一维 dma 传输模式 |
+| DIMENSION1 | 二维 dma 传输模式 |
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+[k_sdma_chn_attr_t](#333-k_sdma_chn_attr_t)
+
+#### 3.3.3 k_sdma_chn_attr_t
+
+【说明】
+
+定义 sdma 通道属性。
+
+【定义】
+
+```c
+typedef struct
+{
+ k_u8 buffer_num;
+ k_u32 line_size;
+ k_u16 line_num;
+ k_u16 line_space;
+ k_sdma_data_mode_e data_mode;
+ k_dma_mode_e work_mode;
+} k_sdma_chn_attr_t;
+```
+
+【成员】
+
+| 成员名称 | 描述 |
+|------------|----------------------------------------------------------------------------|
+| buffer_num | sdma 通道 buffer 数量,至少为 1。 |
+| line_size | 对于 1d 模式来说,是传输数据的总长度;对于 2d 模式来说,是单行数据的长度。 |
+| line_num | 对于 1d 模式来说,此成员无效;对于 2d 模式来说,是传输的行的个数。 |
+| line_space | 对于 1d 模式来说,此成员无效;对于 2d 模式来说,是行与行之间的间隔。 |
+| data_mode | sdma 传输数据的模式,包括 1d 模式和 2d 模式。 |
+| work_mode | 工作模式,可以选择绑定模式或者非绑定模式。 |
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+[k_dma_chn_attr_u](#315-k_dma_chn_attr_u)
+
+## 4. 错误码
+
+### 4.1 dma 错误码
+
+表 41
+
+| 错误代码 | 宏定义 | 描述 |
+|-------------|-------------------------|------------------------------|
+| 0xa00148001 | K_ERR_DMA_INVALID_DEVID | 无效的设备号 |
+| 0xa00148002 | K_ERR_DMA_INVALID_CHNID | 无效的通道号 |
+| 0xa00148003 | K_ERR_DMA_ILLEGAL_PARAM | 参数错误 |
+| 0xa00148004 | K_ERR_DMA_EXIST | DMA 设备已经存在 |
+| 0xa00148005 | K_ERR_DMA_UNEXIST | DMA 设备不存在 |
+| 0xa00148006 | K_ERR_DMA_NULL_PTR | 空指针错误 |
+| 0xa00148007 | K_ERR_DMA_NOT_CONFIG | 尚未配置 DMA |
+| 0xa00148008 | K_ERR_DMA_NOT_SUPPORT | 不支持的功能 |
+| 0xa00148009 | K_ERR_DMA_NOT_PERM | 操作不允许 |
+| 0xa0014800c | K_ERR_DMA_NOMEM | 分配内存失败,如系统内存不足 |
+| 0xa0014800d | K_ERR_DMA_NOBUF | BUFF 不足 |
+| 0xa0014800e | K_ERR_DMA_BUF_EMPTY | BUFF 为空 |
+| 0xa0014800f | K_ERR_DMA_BUF_FULL | BUFF 已满 |
+| 0xa00148010 | K_ERR_DMA_NOTREADY | 设备未就绪 |
+| 0xa00148011 | K_ERR_DMA_BADADDR | 错误的地址 |
+| 0xa00148012 | K_ERR_DMA_BUSY | DMA 处与忙状态 |
+
+## 5. 调试信息
+
+### 5.1 概述
+
+调试信息采用了 proc 文件系统,可实时反映当前系统的运行状态,所记录的信息可供问题定位及分析时使用
+
+【文件目录】
+
+/proc/
+
+【文件清单】
+
+| 文件名称 | 描述 |
+|-----------|-----------------------------|
+| umap/dma | 记录当前 dma 模块的使用情况 |
+
+### 5.2 系统绑定
+
+#### 5.2.1 系统绑定调试信息
+
+【调试信息】
+
+```shell
+msh /\>cat /proc/umap/dma
+-------------------------------dma dev attr info---------------------------------
+DevId burst_len outstanding ckg_bypass
+0 0 0 0
+
+-------------------------------dma chn 0\~3 attr info-------------------------------
+ChnId rotation x_mirror y_mirror width height work_mode
+0 0 false false 0 0 BIND
+1 0 false false 0 0 BIND
+2 0 false false 0 0 BIND
+3 0 false false 0 0 BIND
+
+-------------------------------dma chn 4\~7 attr info-------------------------------
+ChnId line_size line_num line_space data_mode work_mode
+4 0 0 0 1 DIMENSION BIND
+5 0 0 0 1 DIMENSION BIND
+6 0 0 0 1 DIMENSION BIND
+7 0 0 0 1 DIMENSION BIND
+```
+
+【调试信息分析】
+
+记录当前 dma 模块的使用情况
+
+【设备参数说明】
+
+| 参数 | **描述** |
+|-------------|------------------|
+| DevId | 设备号 |
+| burst_len | dma burst length |
+| outstanding | dma outstanding |
+
+【gdma 通道参数说明】
+
+| 参数 | **描述** |
+|-----------|------------------------|
+| ChnId | 通道号 |
+| rotation | 旋转度数 |
+| x_mirror | 是否进行了水平镜像 |
+| y_mirror | 是否进行了垂直镜像 |
+| width | 图像宽度,以像素为单位 |
+| height | 图像高度,以像素为单位 |
+| work_mode | 工作模式 |
+
+【sdma 通道参数说明】
+
+| 参数 | **描述** |
+|------------|----------------------------------------------------------------------------|
+| ChnId | 通道号 |
+| line_size | 对于 1d 模式来说,是传输数据的总长度;对于 2d 模式来说,是单行数据的长度。 |
+| ine_num | 对于 1d 模式来说,此成员无效;对于 2d 模式来说,是传输的行的个数。 |
+| line_space | 对于 1d 模式来说,此成员无效;对于 2d 模式来说,是行与行之间的间隔。 |
+| data_mode | sdma 传输数据的模式,包括 1d 模式和 2d 模式 |
+| work_mode | 工作模式,可以选择绑定模式或者非绑定模式。 |
+
+## 6. demo 描述
+
+### 6.1 非绑定模式 demo
+
+非绑定模式 demo 位于 /bin/sample_dma.elf,执行 /bin/sample_dma.elf 后开始循环运行,按 e + 回车结束运行。
+
+demo 主要实现了以下功能:
+
+- 使用通道 0 搬运分辨率为 1920\*1080,8bit,YUV400 单通道的图像,gdma 旋转 90 度后输出;
+- 使用通道 1 搬运分辨率为 1280\*720,8bit,YUV420 双通道的图像,gdma 旋转 180 度后输出;
+- 使用通道 2 搬运分辨率为 1280\*720,10bit,YUV420 三通道的图像,gdma 进行水平和垂直镜像后输出;
+- 使用通道 4 搬运数据,sdma 使用 1d 模式搬运;
+- 使用通道 5 搬运数据,sdma 使用 2d 模式搬运。
+
+### 6.2 绑定模式 demo
+
+绑定模式 demo 位于 /bin/sample_dma_bind.elf,执行 /bin/sample_dma_bind.elf 后开始循环运行,按 e + 回车结束运行。
+
+demo 主要实现了以下功能:
+
+- 以 vvi 模块作为 gsdma 前级绑定的模拟输入,实现绑定功能的测试;
+- 两个通道分别输入分辨率为 640\*320,8bit,YUV400 单通道的图像,gdma 分别旋转 90 度和 180 度后输出。
diff --git "a/zh/01_software/board/mpp/K230_DPU_API\345\217\202\350\200\203.md" "b/zh/01_software/board/mpp/K230_DPU_API\345\217\202\350\200\203.md"
new file mode 100644
index 0000000..22586c1
--- /dev/null
+++ "b/zh/01_software/board/mpp/K230_DPU_API\345\217\202\350\200\203.md"
@@ -0,0 +1,1606 @@
+# K230 DPU API参考
+
+
+
+版权所有©2023北京嘉楠捷思信息技术有限公司
+
+
+
+## 免责声明
+
+您购买的产品、服务或特性等应受北京嘉楠捷思信息技术有限公司(“本公司”,下同)及其关联公司的商业合同和条款的约束,本文档中描述的全部或部分产品、服务或特性可能不在您的购买或使用范围之内。除非合同另有约定,本公司不对本文档的任何陈述、信息、内容的正确性、可靠性、完整性、适销性、符合特定目的和不侵权提供任何明示或默示的声明或保证。除非另有约定,本文档仅作为使用指导参考。
+
+由于产品版本升级或其他原因,本文档内容将可能在未经任何通知的情况下,不定期进行更新或修改。
+
+## 商标声明
+
+、“嘉楠”和其他嘉楠商标均为北京嘉楠捷思信息技术有限公司及其关联公司的商标。本文档可能提及的其他所有商标或注册商标,由各自的所有人拥有。
+
+**版权所有 © 2023北京嘉楠捷思信息技术有限公司。保留一切权利。**
+非经本公司书面许可,任何单位和个人不得擅自摘抄、复制本文档内容的部分或全部,并不得以任何形式传播。
+
+
+
+## 目录
+
+[TOC]
+
+## 前言
+
+### 概述
+
+本文档主要介绍 K230 DPU 软件的使用,内容主要包括 DPU API 的使用及 demo 介绍。
+
+### 读者对象
+
+本文档(本指南)主要适用于以下人员:
+
+- 技术支持工程师
+- 软件开发工程师
+
+### 缩略词定义
+
+| 简称 | 说明 |
+|------|------------------------------------------------|
+| DPU | Depth Process Unit,深度处理单元 |
+| LCN | Local Contrast Normalization,局部对比度归一化 |
+
+### 修订记录
+
+| 文档版本号 | 修改说明 | 修改者 | 日期 |
+|------------|-----------------------------------------------------------------------------------------------------------------------------------------|--------|-----------|
+| v1.0 | 初版 | 刘孙涛 | 2023/3/30 |
+| v1.1 | 增加了配置离线处理后的参考图的接口函数 [kd_mpi_dpu_set_processed_ref_image](#217-kd_mpi_dpu_set_processed_ref_image); 增加了模块调试信息。 | 刘孙涛 | 2023/4/20 |
+| V1.2 | 增加了 buffer 可配置的功能 | 刘孙涛 | 2023/5/31 |
+
+## 1. 概述
+
+### 1.1 概述
+
+DPU 主要负责 3D 结构光的深度计算,为 3D 人脸识别提供深度信息。
+
+### 1.2 功能描述
+
+#### 1.2.1 绑定模式调用流程
+
+
+
+#### 1.2.2 非绑定模式调用流程
+
+
+
+## 2. API 参考
+
+### 2.1 DPU 使用
+
+该功能模块提供以下API:
+
+- [kd_mpi_dpu_init](#211-kd_mpi_dpu_init)
+- [kd_mpi_dpu_delete](#212-kd_mpi_dpu_delete)
+- [kd_mpi_dpu_parse_file](#213-kd_mpi_dpu_parse_file)
+- [kd_mpi_dpu_set_dev_attr](#214-kd_mpi_dpu_set_dev_attr)
+- [kd_mpi_dpu_get_dev_attr](#215-kd_mpi_dpu_get_dev_attr)
+- [kd_mpi_dpu_set_ref_image](#216-kd_mpi_dpu_set_ref_image)
+- [kd_mpi_dpu_set_processed_ref_image](#217-kd_mpi_dpu_set_processed_ref_image)
+- [kd_mpi_dpu_set_template_image](#218-kd_mpi_dpu_set_template_image)
+- [kd_mpi_dpu_start_dev](#219-kd_mpi_dpu_start_dev)
+- [kd_mpi_dpu_set_chn_attr](#2110-kd_mpi_dpu_set_chn_attr)
+- [kd_mpi_dpu_get_chn_attr](#2111-kd_mpi_dpu_get_chn_attr)
+- [kd_mpi_dpu_start_chn](#2112-kd_mpi_dpu_start_chn)
+- [kd_mpi_dpu_stop_chn](#2113-kd_mpi_dpu_stop_chn)
+- [kd_mpi_dpu_send_frame](#2114-kd_mpi_dpu_send_frame)
+- [kd_mpi_dpu_get_frame](#2115-kd_mpi_dpu_get_frame)
+- [kd_mpi_dpu_release_frame](#2116-kd_mpi_dpu_release_frame)
+
+#### 2.1.1 kd_mpi_dpu_init
+
+【描述】
+
+初始化 dpu 设备
+
+【语法】
+
+k_s32 kd_mpi_dpu_init(k_dpu_init_t \*init);
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|--------------------------------|-----------|
+| init | 初始化 dpu 设备的结构体指针。 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+【芯片差异】
+
+无。
+
+【需求】
+
+- 头文件:mpi_dpu_api.h
+- 库文件:libdpu.a
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+[k_dpu_init_t](#311-k_dpu_init_t)
+
+#### 2.1.2 kd_mpi_dpu_delete
+
+【描述】
+
+删除已经初始化的 dpu 设备。
+
+【语法】
+
+k_s32 kd_mpi_dpu_delete();
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|------|-----------|
+| 无 | 无 | 无 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_dpu_api.h
+- 库文件:libdpu.a
+
+【注意】
+
+需要在对 dpu 设备初始化以后才可以调用此函数 delete dpu。
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+#### 2.1.3 kd_mpi_dpu_parse_file
+
+【描述】
+
+从 dpu 配置文件中解析 dpu 配置参数。
+
+【语法】
+
+k_s32 kd_mpi_dpu_parse_file(const k_char \*param_path, k_dpu_dev_param_t \*param, k_dpu_lcn_param_t \*lcn_param, k_dpu_ir_param_t \*ir_param, k_dpu_user_space_t \*g_temp_space);
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|--------------|----------------------------------------------------------------------------|-----------|
+| param_path | 配置文件的路径 | 输入 |
+| param | dpu 设备参数的结构体指针,从配置文件中解析出来的设备参数保存在此结构体中 | 输出 |
+| lcn_param | lcn 通道参数的结构体指针,从配置文件中解析出来的通道参数保存在此结构体中。 | 输出 |
+| ir_param | ir 通道参数的结构体指针,从配置文件中解析出来的通道参数保存在此结构体中。 | 输出 |
+| g_temp_space | 模板图结构体指针,从配置文件中解析出来的模板图首地址保存在此结构体中。 | 输出 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_dpu_api.h
+- 库文件:libdpu.a
+
+【注意】
+
+- dpu 设备参数包括长周期参数和短周期参数。
+- lcn_param 和 ir_param 这两个通道参数是 dpu 设备参数的子集,如果已经配置了 dpu 设备参数,可以忽略这两个通道参数。如果需要更改这两个通道参数结构体中的参数,既可以更改通道参数以后调用 kd_mpi_dpu_set_chn_attr 来使更改生效,也可以更改设备参数以后调用 kd_mpi_dpu_set_dev_attr 来使更改生效。如果只更改了通道参数,那么调用 kd_mpi_dpu_set_chn_attr 效率更高。
+- 模板图结构体中包含了从配置文件中解析出来的模板图的虚拟地址和物理地址,以及模板图的大小。
+
+【举例】
+
+无
+
+【相关主题】
+
+[k_dpu_dev_param_t](#312-k_dpu_dev_param_t)
+
+#### 2.1.4 kd_mpi_dpu_set_dev_attr
+
+【描述】
+
+配置 dpu 设备属性。
+
+【语法】
+
+k_s32 kd_mpi_dpu_set_dev_attr(k_dpu_dev_attr_t \*attr);
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|--------------|-----------|
+| attr | dpu 设备属性 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_dpu_api.h
+- 库文件:libdpu.a
+
+【注意】
+
+- 只有对 dpu 设备初始化以后才可以调用此函数配置 dpu 设备属性。
+- 在首次配置 dpu 设备属性时,应该将 attr 中的 tytz_temp_recfg 和 align_depth_recfg 配置为 K_TRUE,以使 dpu 加载对应参数。后续更改 dpu 设备属性时,如果对应的长周期参数没有改变,将这两个成员配置为 K_FALSE,可以节省 dpu 再次加载长周期参数的时间。
+
+【举例】
+
+无
+
+【相关主题】
+
+[k_dpu_dev_attr_t](#316-k_dpu_dev_attr_t)
+
+#### 2.1.5 kd_mpi_dpu_get_dev_attr
+
+【描述】
+
+获取 dpu 设备属性。
+
+【语法】
+
+k_s32 kd_mpi_dpu_set_dev_attr(k_dpu_dev_attr_t \*attr);
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|--------------|-----------|
+| attr | dpu 设备属性 | 输出 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_dpu_api.h
+- 库文件:libdpu.a
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+[k_dpu_dev_attr_t](#316-k_dpu_dev_attr_t)
+
+#### 2.1.6 kd_mpi_dpu_set_ref_image
+
+【描述】
+
+配置 dpu 参考图。
+
+【语法】
+
+k_s32 kd_mpi_dpu_set_ref_image(const k_char \*ref_path);
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|------------|-----------|
+| ref_path | 参考图路径 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_dpu_api.h
+- 库文件:libdpu.a
+
+【注意】
+
+- 需要在配置 dpu 设备属性以后再调用此函数配置参考图。
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+#### 2.1.7 kd_mpi_dpu_set_processed_ref_image
+
+【描述】
+
+配置离线处理后的 dpu 参考图。
+
+【语法】
+
+k_s32 kd_mpi_dpu_set_processed_ref_image(const k_char \*ref_path);
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|--------------------|-----------|
+| ref_path | 处理后的参考图路径 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_dpu_api.h
+- 库文件:libdpu.a
+
+【注意】
+
+- 需要在配置 dpu 设备属性以后再调用此函数配置参考图,配置的参考图需要离线处理好,调用此函数可以比 [kd_mpi_dpu_set_ref_image](#216-kd_mpi_dpu_set_ref_image) 节省约 70ms 时间。
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+#### 2.1.8 kd_mpi_dpu_set_template_image
+
+【描述】
+
+配置 dpu 模板图
+
+【语法】
+
+k_s32 kd_mpi_dpu_set_template_image(k_dpu_user_space_t \*temp_space);
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|------------|----------------|-----------|
+| temp_space | 模板图结构体。 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_dpu_api.h
+- 库文件:libdpu.a
+
+【注意】
+
+- 需要在配置 dpu 设备属性以后再调用此函数配置参考图。
+- temp_space 需要在 [kd_mpi_dpu_parse_file](#213-kd_mpi_dpu_parse_file) 时作为参数传入,以从配置文件中获取模板图信息。
+
+【举例】
+
+无
+
+【相关主题】
+
+[k_dpu_user_space_t](#315-k_dpu_user_space_t)
+[kd_mpi_dpu_parse_file](#213-kd_mpi_dpu_parse_file)
+
+#### 2.1.9 kd_mpi_dpu_start_dev
+
+【描述】
+
+启动 dpu 设备
+
+【语法】
+
+k_s32 kd_mpi_dpu_start_dev();
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|------|-----------|
+| 无 | 无 | 无 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_dpu_api.h
+- 库文件:libdpu.a
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+#### 2.1.10 kd_mpi_dpu_set_chn_attr
+
+【描述】
+
+配置 dpu 通道属性
+
+【语法】
+
+k_s32 kd_mpi_dpu_set_chn_attr(k_dpu_chn_lcn_attr_t \*lcn_attr, k_dpu_chn_ir_attr_t \*ir_attr);
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|------------------|-----------|
+| lcn_attr | 散斑图通道属性。 | 输入 |
+| ir_attr | 红外图通道属性。 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_dpu_api.h
+- 库文件:libdpu.a
+
+【注意】
+
+- 当前 dpu 设备一共有两个通道:0 和 1。通过配置 lcn_attr-\>chn_num 和 ir_attr-\>chn_num(如果开启了红外图通道) 来指明散斑图和红外图各自的输入输出通道。
+- 在首次启动 dpu 设备 [kd_mpi_dpu_start_dev](#219-kd_mpi_dpu_start_dev) 以后,应该调用此函数来配置通道属性,其中散斑图通道必须配置,红外图通道如果没有开启可以不配置(配置为 NULL)。
+- 在运行过程中如果只需要更改某个通道的属性,可以只传入该通道的结构体参数,另一个通道的参数可以为 NULL。也可以同时传入两个通道的参数。如果两个通道的参数都为 NULL,则该次配置是不会生效的。
+
+【举例】
+
+无
+
+【相关主题】
+
+[k_dpu_chn_lcn_attr_t](#317-k_dpu_chn_lcn_attr_t)
+[k_dpu_chn_ir_attr_t](#318-k_dpu_chn_ir_attr_t)
+
+#### 2.1.11 kd_mpi_dpu_get_chn_attr
+
+【描述】
+
+获取 dpu 通道属性。
+
+【语法】
+
+k_s32 kd_mpi_dpu_get_chn_attr(k_dpu_chn_lcn_attr_t \*lcn_attr, k_dpu_chn_ir_attr_t \*ir_attr);
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|------------------|-----------|
+| lcn_attr | 散斑图通道属性。 | 输出 |
+| ir_attr | 红外图通道属性。 | 输出 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_dpu_api.h
+- 库文件:libdpu.a
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+[k_dpu_chn_lcn_attr_t](#317-k_dpu_chn_lcn_attr_t)
+[k_dpu_chn_ir_attr_t](#318-k_dpu_chn_ir_attr_t)
+
+#### 2.1.12 kd_mpi_dpu_start_chn
+
+【描述】
+
+启动 dpu 通道
+
+【语法】
+
+k_s32 kd_mpi_dpu_start_chn(k_u32 chn_num);
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|--------|-----------|
+| chn_num | 通道号 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_dpu_api.h
+- 库文件:libdpu.a
+
+【注意】
+
+- 通道号应该为 0 或 1。
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+#### 2.1.13 kd_mpi_dpu_stop_chn
+
+【描述】
+
+停止 dpu 通道
+
+【语法】
+
+k_s32 kd_mpi_dpu_stop_chn(k_u32 chn_num);
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|--------|-----------|
+| chn_num | 通道号 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_dpu_api.h
+- 库文件:libdpu.a
+
+【注意】
+
+- 通道号应为 0 或 1。
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+#### 2.1.14 kd_mpi_dpu_send_frame
+
+【描述】
+
+在非绑定模式下,向 dpu 发送一帧数据。
+
+【语法】
+
+k_s32 kd_mpi_dpu_send_frame(k_u32 chn_num, k_u64 addr, k_s32 s32_millisec);
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|--------------|---------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------|-----------|
+| chn_num | 通道号 | 输入 |
+| addr | 发送数据的物理地址 | 输入 |
+| s32_millisec | 等待时间。 当此参数设置为 -1 时,阻塞模式,直到发送成功才会返回; 当此参数设置为 0 时,非阻塞模式,发送成功立即返回零,发送失败立即返回其他值,具体失败信息参考 [dpu 错误码](#41-dpu-错误码); | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_dpu_api.h
+- 库文件:libdpu.a
+
+【注意】
+
+- 如果同时开启了散斑图和红外图通路,需要红外图和散斑图严格交叉输入。
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+#### 2.1.15 kd_mpi_dpu_get_frame
+
+【描述】
+
+从 dpu 获取一帧数据。
+
+【语法】
+
+k_s32 kd_mpi_dpu_get_frame(k_u32 chn_num, k_dpu_chn_result_u \*result, k_s32 s32_millisec);
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|--------------|----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------|-----------|
+| chn_num | 通道号 | 输入 |
+| result | dpu 输出结果联合体,其成员变量分别是 k_dpu_chn_lcn_result_t 和 k_dpu_chn_ir_result_t 。选择哪个成员作为该通道的输出结果由用户根据 [kd_mpi_dpu_set_chn_attr](#2110-kd_mpi_dpu_set_chn_attr) 的配置来自行决定。 | 输出 |
+| s32_millisec | 等待时间。 当此参数设置为 -1 时,阻塞模式,直到获取成功才会返回; 当此参数设置为 0 时,非阻塞模式,获取成功立即返回零,获取失败立即返回其他值,具体失败信息参考 [dpu 错误码](#41-dpu-错误码); | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_dpu_api.h
+- 库文件:libdpu.a
+
+【注意】
+
+- 如果同时开启了红外图和散斑图,注意及时取走两个通道的输出结果,否则 buffer 中的结果会溢出造成无法继续输入的情况。
+
+【举例】
+
+无
+
+【相关主题】
+
+[k_dpu_chn_result_u](#319-k_dpu_chn_result_u)
+[k_dpu_chn_lcn_result_t](#3110-k_dpu_chn_lcn_result_t)
+[k_dpu_chn_ir_result_t](#3111-k_dpu_chn_ir_result_t)
+[k_dpu_disp_out_t](#3112-k_dpu_disp_out_t)
+[k_dpu_depth_out_t](#3113-k_dpu_depth_out_t)
+[k_dpu_ir_out_t](#3114-k_dpu_ir_out_t)
+[k_dpu_qlt_out_t](#3115-k_dpu_qlt_out_t)
+
+#### 2.1.16 kd_mpi_dpu_release_frame
+
+【描述】
+
+在非绑定模式下,释放已经获取的结果。
+
+【语法】
+
+k_s32 kd_mpi_dpu_release_frame();
+
+【参数】
+
+无
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_dpu_api.h
+- 库文件:libdpu.a
+
+【注意】
+
+- 此函数会依次释放 buffer 中的数据,先生成的结果先释放。目前 dpu buffer 为 3,使用完 [kd_mpi_dpu_get_frame](#2115-kd_mpi_dpu_get_frame) 获取的结果以后请尽快释放。
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+## 3. 数据类型
+
+### 3.1 公共数据类型
+
+本模块有如下数据类型:
+
+- [k_dpu_init_t](#311-k_dpu_init_t)
+- [k_dpu_dev_param_t](#312-k_dpu_dev_param_t)
+- [k_dpu_lcn_param_t](#313-k_dpu_lcn_param_t)
+- [k_dpu_ir_param_t](#314-k_dpu_ir_param_t)
+- [k_dpu_user_space_t](#315-k_dpu_user_space_t)
+- [k_dpu_dev_attr_t](#316-k_dpu_dev_attr_t)
+- [k_dpu_chn_lcn_attr_t](#317-k_dpu_chn_lcn_attr_t)
+- [k_dpu_chn_ir_attr_t](#318-k_dpu_chn_ir_attr_t)
+- [k_dpu_chn_result_u](#319-k_dpu_chn_result_u)
+- [k_dpu_chn_lcn_result_t](#3110-k_dpu_chn_lcn_result_t)
+- [k_dpu_chn_ir_result_t](#3111-k_dpu_chn_ir_result_t)
+- [k_dpu_disp_out_t](#3112-k_dpu_disp_out_t)
+- [k_dpu_depth_out_t](#3113-k_dpu_depth_out_t)
+- [k_dpu_ir_out_t](#3114-k_dpu_ir_out_t)
+- [k_dpu_qlt_out_t](#3115-k_dpu_qlt_out_t)
+
+#### 3.1.1 k_dpu_init_t
+
+【说明】
+
+dpu 设备初始化结构体
+
+【定义】
+
+```c
+typedef struct {
+ k_u32 start_num;
+ k_u32 buffer_num;
+} k_dpu_init_t;
+```
+
+【成员】
+
+| 成员名称 | 描述 |
+|-----------|-----------------------------------------------------|
+| start_num | dpu 设备起始帧号(即 dpu 计算出来的第一帧的帧号)。 |
+| buffer_num| dpu 缓存 buffer 的数量,至少为 1 |
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+[kd_mpi_dpu_init](#211-kd_mpi_dpu_init)
+
+#### 3.1.2 k_dpu_dev_param_t
+
+【说明】
+
+dpu 设备参数结构体。
+
+【定义】
+
+```c
+typedef struct
+{
+ k_dpu_long_parameter_t lpp;
+ k_dpu_short_parameter_t spp;
+} k_dpu_dev_param_t;
+```
+
+【成员】
+
+| 成员名称 | 描述 |
+|----------|----------------------|
+| lpp | dpu 长周期参数结构体 |
+| spp | dpu 短周期参数结构体 |
+
+【注意事项】
+
+- 用户需要对长周期参数中的值进行改变时,应该使用虚拟地址成员变量。
+
+【相关数据类型及接口】
+
+[k_dpu_long_parameter_t](#321-k_dpu_long_parameter_t)
+[kd_mpi_dpu_parse_file](#213-kd_mpi_dpu_parse_file)
+
+#### 3.1.3 k_dpu_lcn_param_t
+
+【说明】
+
+散斑图通道参数结构体。
+
+【定义】
+
+```c
+typedef struct {
+ k_u8 matching_length_left_p0;
+ k_u8 matching_length_right_p0;
+
+ float image_check_match_threshold;
+ float depth_p1;
+ float depth_p2;
+ float depth_precision;
+} k_dpu_lcn_param_t;
+```
+
+【成员】
+| 成员名称 | 描述 |
+|-----------------------------|---------------------------------------------------------------------|
+| matching_length_left_p0 | 粗搜索:视差计算向左搜索范围,取值:0~256,整型 |
+| matching_length_right_p0 | 粗搜索:视差计算向右搜索范围,取值:0~256,整型 |
+| image_check_match_threshold | 散斑图质量评定:模板匹配阈值,取值范围:0.0~1.0,浮点型:0.01精度 |
+| depth_p1 | 视差转深度:深度数值计算系数p1,取值范围:0.0~50000.0,浮点型:0.01精度 |
+| depth_p2 | 视差转深度:深度数值计算系数p2,取值范围:-5.0~100.0,浮点型:0.01精度 |
+| depth_precision | 视差转深度:深度数值精度(倍数),取值范围:0.0~100.0,浮点型:0.1精度 |
+
+【注意事项】
+
+- 此通道结构体参数是设备结构体参数的子集,如果已经配置了设备参数,且通道参数和设备参数相同,可以不配置通道参数。
+
+【相关数据类型及接口】
+
+[kd_mpi_dpu_parse_file](#213-kd_mpi_dpu_parse_file)
+
+#### 3.1.4 k_dpu_ir_param_t
+
+【说明】
+
+红外图通道参数结构体。
+
+【定义】
+
+```c
+typedef struct {
+ float depth_k1;
+ float depth_k2;
+ float tz;
+} k_dpu_ir_param_t;
+```
+
+【成员】
+| 成员名称 | 描述 |
+|---|---|
+| depth_k1 | 直接完全对应一个寄存器。三图对齐:深度数值计算系数k1,取值范围:2e-4~1e-2,浮点型:1e-5精度 |
+| depth_k2 | 直接完全对应一个寄存器。三图对齐:深度数值计算系数k2,取值范围:0.5~1.5,浮点型:0.001精度 |
+| tz | 直接完全对应一个寄存器。三图对齐:投射器z方向偏移量(毫米),取值范围:-5.0~5.0,浮点型:0.001精度 |
+
+【注意事项】
+
+- 此通道结构体参数是设备结构体参数的子集,如果已经配置了设备参数,且通道参数和设备参数相同,可以不配置通道参数。
+
+【相关数据类型及接口】
+
+[kd_mpi_dpu_parse_file](#213-kd_mpi_dpu_parse_file)
+
+#### 3.1.5 k_dpu_user_space_t
+
+【说明】
+
+用户获取模板图结构体参数。
+
+【定义】
+
+```c
+typedef struct {
+ k_bool used;
+ k_u32 size;
+ k_u64 phys_addr;
+ void *virt_addr;
+} k_dpu_user_space_t;
+```
+
+【成员】
+
+| 成员名称 | 描述 |
+|-----------|------------------------|
+| used | 用户不需要关注 |
+| size | 用户获取的模板图的大小 |
+| phys_addr | 模板图的物理地址 |
+| virt_addr | 模板图的虚拟地址 |
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+[kd_mpi_dpu_parse_file](#213-kd_mpi_dpu_parse_file)
+
+#### 3.1.6 k_dpu_dev_attr_t
+
+【说明】
+
+配置 dpu 设备属性结构体。
+
+【定义】
+
+```c
+typedef struct {
+ k_dpu_mode_e mode;
+ k_bool tytz_temp_recfg;
+ k_bool align_depth_recfg;
+ k_bool ir_never_open;
+ k_u32 param_valid;
+ k_dpu_dev_param_t dev_param;
+} k_dpu_dev_attr_t;
+```
+
+【成员】
+
+| 成员名称 | 描述 |
+|-------------------|--------------------------------------------------------------------------------------------------------------------------|
+| mode | dpu 运行模式,包括绑定模式和非绑定模式。 |
+| tytz_temp_recfg | 是否更新加载 SAD 温度补偿参数和 TyTz 行补偿计算算数。当此标志位为 K_FALSE 时表明不更新,当此标志位为 K_TRUE 时表明更新。 |
+| align_depth_recfg | 是否更新加载三图对齐/转深度计算参数。当此标志位为 K_FALSE 时表明不更新,当此标志位为 K_TRUE 时表明更新。 |
+| ir_never_open | vb 池是在启动 dpu 设备时配置的,直到暂停 dpu 设备时释放。其大小在启动设备时进行初始化,因此在启动设备时就预留了深度/视差图、红外输出、质量检测、粗细列视差、初始行列式差共五部分的空间。用户可以在使用周期内通过 dev_param.spp.flag_align 来选择是否开启三图对齐。 如果在整个使用周期内都不会有红外图的输出,就不需要为红外图预留空间。配置为 K_TRUE 表明不需要为红外图输出预留空间,配置为 K_FALSE 表明需要为红外图输出预留空间。 |
+| param_valid | 用户配置 dpu 设备属性时,将此成员设置为一个任意的非零值,当设备属性生效时,会在对应生效的帧的输出结果中返回该任意值。 |
+| dev_param | dpu 设备参数结构体。 |
+
+【注意事项】
+
+- 在首次配置 dpu 设备属性时,应该将 tytz_temp_recfg 和 align_depth_recfg 配置为 K_TRUE,以使 dpu 加载对应参数。
+
+【相关数据类型及接口】
+
+[k_dpu_dev_param_t](#312-k_dpu_dev_param_t)
+[kd_mpi_dpu_set_dev_attr](#214-kd_mpi_dpu_set_dev_attr)
+
+#### 3.1.7 k_dpu_chn_lcn_attr_t
+
+【说明】
+
+配置散斑图通道属性结构体
+
+【定义】
+
+```c
+typedef struct {
+ k_u8 param_valid;
+ k_s32 chn_num;
+ k_dpu_lcn_param_t lcn_param;
+} k_dpu_chn_lcn_attr_t;
+```
+
+【成员】
+
+| 成员名称 | 描述 |
+|-------------|--------------------------------------------------------------------------------------------------------------------------------------------------------------|
+| param_valid | 用户配置散斑图通道属性时,将此成员设置为一个任意的非零值,当设备属性生效时,会在对应生效的帧的输出结果中返回该任意值。 |
+| chn_num | 通道号。当前 dpu 设备一共有两个通道,用户可以将此通道号设为 0 或 1,散斑图通道将在对应通道中输入输出。如果开启了红外图通道,此通道号应该与红外图通道号不同。 |
+| lcn_param | 散斑图通道参数。 |
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+[kd_mpi_dpu_set_chn_attr](#2110-kd_mpi_dpu_set_chn_attr)
+
+#### 3.1.8 k_dpu_chn_ir_attr_t
+
+【说明】
+
+配置红外图通道属性结构体
+
+【定义】
+
+```c
+typedef struct {
+ k_u8 param_valid;
+ k_s32 chn_num;
+ k_dpu_ir_param_t ir_param;
+} k_dpu_chn_ir_attr_t;
+```
+
+【成员】
+
+| 成员名称 | 描述 |
+|-------------|----------------------------------------------------------------------------------------------------------------------------------------|
+| param_valid | 用户配置散斑图通道属性时,将此成员设置为一个任意的非零值,当设备属性生效时,会在对应生效的帧的输出结果中返回该任意值。 |
+| chn_num | 通道号。当前 dpu 设备一共有两个通道,用户可以将此通道号设为 0 或 1,红外图通道将在对应通道中输入输出。此通道号应该与散斑图通道号不同。 |
+| ir_param | 红外图通道参数。 |
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+[kd_mpi_dpu_set_chn_attr](#2110-kd_mpi_dpu_set_chn_attr)
+
+#### 3.1.9 k_dpu_chn_result_u
+
+【说明】
+
+获取 dpu 输出结果的联合体
+
+【定义】
+
+```c
+typedef union {
+ k_dpu_chn_lcn_result_t lcn_result;
+ k_dpu_chn_ir_result_t ir_result;
+} k_dpu_chn_result_u;
+```
+
+【成员】
+
+| 成员名称 | 描述 |
+|------------|-----------------------------------------------------------------------------|
+| lcn_result | 散斑图通道输出结果结构体。[k_dpu_chn_lcn_result_t](#3110-k_dpu_chn_lcn_result_t) |
+| ir_result | 红外图通道输出结果结构体。[k_dpu_chn_ir_result_t](#3111-k_dpu_chn_ir_result_t) |
+
+【注意事项】
+
+- 用户选择哪个成员作为输出结果需要根据用户自己的配置来选择。在 [kd_mpi_dpu_set_chn_attr](#2110-kd_mpi_dpu_set_chn_attr) 中用户配置了通道号和通道类型的对应关系。
+
+【相关数据类型及接口】
+
+[k_dpu_chn_lcn_result_t](#3110-k_dpu_chn_lcn_result_t)
+[k_dpu_chn_ir_result_t](#3111-k_dpu_chn_ir_result_t)
+[kd_mpi_dpu_get_frame](#2115-kd_mpi_dpu_get_frame)
+
+#### 3.1.10 k_dpu_chn_lcn_result_t
+
+【说明】
+
+dpu 散斑图通道输出结果的结构体
+
+【定义】
+
+```c
+typedef struct {
+ k_u32 time_ref;
+ k_u64 pts;
+ k_dpu_disp_out_t disp_out;
+ k_dpu_depth_out_t depth_out;
+ k_dpu_qlt_out_t qlt_out;
+ k_dpu_param_flag_t flag;
+} k_dpu_chn_lcn_result_t;
+```
+
+【成员】
+
+| 成员名称 | 描述 |
+|-----------|------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------|
+| pts | 时间戳,绑定模式下有效。 |
+| disp_out | 视差图输出结果结构体。 |
+| depth_out | 深度图输出结果结构体。 |
+| qlt_out | 质量检测输出结果结构体。包括质量检测结果、粗细_列视差(初始分辨率)结果、初始行列式差结果。 |
+| flag | 此结构体用来标记用户配置的参数在哪一帧生效了。结构体中包含了 [k_dpu_dev_attr_t](#316-k_dpu_dev_attr_t)、[k_dpu_chn_lcn_attr_t](#317-k_dpu_chn_lcn_attr_t)、[k_dpu_chn_ir_attr_t](#318-k_dpu_chn_ir_attr_t) 中的 param_valid 变量。 |
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+[k_dpu_disp_out_t](#3112-k_dpu_disp_out_t)
+[k_dpu_depth_out_t](#3113-k_dpu_depth_out_t)
+[k_dpu_qlt_out_t](#3115-k_dpu_qlt_out_t)
+[kd_mpi_dpu_get_frame](#2115-kd_mpi_dpu_get_frame)
+
+#### 3.1.11 k_dpu_chn_ir_result_t
+
+【说明】
+
+dpu 红外图通道输出结果的结构体
+
+【定义】
+
+```c
+typedef struct {
+ k_u32 time_ref;
+ k_u64 pts;
+ k_dpu_ir_out_t ir_out;
+ k_dpu_param_flag_t flag;
+} k_dpu_chn_ir_result_t;
+```
+
+【成员】
+
+| 成员名称 | 描述 |
+|----------|------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------|
+| pts | 时间戳,绑定模式下有效。 |
+| ir_out | 红外图输出结果结构体。 |
+| flag | 此结构体用来标记用户配置的参数在哪一帧生效了。结构体中包含了 [k_dpu_dev_attr_t](#316-k_dpu_dev_attr_t)、[k_dpu_chn_lcn_attr_t](#317-k_dpu_chn_lcn_attr_t)、[k_dpu_chn_ir_attr_t](#318-k_dpu_chn_ir_attr_t) 中的 param_valid 变量。 |
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+[k_dpu_ir_out_t](#3114-k_dpu_ir_out_t)
+[kd_mpi_dpu_get_frame](#2115-kd_mpi_dpu_get_frame)
+
+#### 3.1.12 k_dpu_disp_out_t
+
+【说明】
+
+视差图输出结果的结构体
+
+【定义】
+
+```c
+typedef struct {
+ k_bool valid;
+ k_u32 length;
+ k_u64 disp_phys_addr;
+ k_u64 disp_virt_addr;
+} k_dpu_disp_out_t;
+```
+
+【成员】
+
+| 成员名称 | 描述 |
+|----------------|--------------------------------------------------------|
+| valid | K_TRUE:表明输出结果有效; K_FALSE:表明输出结果无效。 |
+| length | 输出结果长度。 |
+| disp_phys_addr | 视差图输出结果物理地址。 |
+| disp_virt_addr | 视差图输出结果虚拟地址。 |
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+[k_dpu_chn_lcn_result_t](#3110-k_dpu_chn_lcn_result_t)
+[kd_mpi_dpu_get_frame](#2115-kd_mpi_dpu_get_frame)
+
+#### 3.1.13 k_dpu_depth_out_t
+
+【说明】
+
+深度图输出结果的结构体
+
+【定义】
+
+```c
+typedef struct {
+ k_bool valid;
+ k_u32 length;
+ k_u64 depth_phys_addr;
+ k_u64 depth_virt_addr;
+} k_dpu_depth_out_t;
+```
+
+【成员】
+
+| 成员名称 | 描述 |
+|-----------------|--------------------------------------------------------|
+| valid | K_TRUE:表明输出结果有效; K_FALSE:表明输出结果无效。 |
+| length | 输出结果长度。 |
+| depth_phys_addr | 深度图输出结果物理地址。 |
+| depth_virt_addr | 深度图输出结果虚拟地址。 |
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+[k_dpu_chn_lcn_result_t](#3110-k_dpu_chn_lcn_result_t)
+[kd_mpi_dpu_get_frame](#2115-kd_mpi_dpu_get_frame)
+
+#### 3.1.14 k_dpu_ir_out_t
+
+【说明】
+
+红外图输出结果的结构体
+
+【定义】
+
+```c
+typedef struct {
+ k_bool valid;
+ k_u32 length;
+ k_u64 ir_phys_addr;
+ k_u64 ir_virt_addr;
+} k_dpu_ir_out_t;
+```
+
+【成员】
+
+| 成员名称 | 描述 |
+|--------------|--------------------------------------------------------|
+| valid | K_TRUE:表明输出结果有效; K_FALSE:表明输出结果无效。 |
+| length | 输出结果长度。 |
+| ir_phys_addr | 红外图输出结果物理地址。 |
+| ir_virt_addr | 红外图输出结果虚拟地址。 |
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+[k_dpu_chn_ir_result_t](#3111-k_dpu_chn_ir_result_t)
+[kd_mpi_dpu_get_frame](#2115-kd_mpi_dpu_get_frame)
+
+#### 3.1.15 k_dpu_qlt_out_t
+
+【说明】
+
+质量检测输出结果的结构体
+
+【定义】
+
+```c
+typedef struct {
+ k_bool valid;
+ k_u32 qlt_length;
+ k_u32 sad_disp_length;
+ k_u32 init_sad_disp_length;
+ k_u64 qlt_phys_addr;
+ k_u64 qlt_virt_addr;
+ k_u64 sad_disp_phys_addr;
+ k_u64 sad_disp_virt_addr;
+ k_u64 init_sad_disp_phys_addr;
+ k_u64 init_sad_disp_virt_addr;
+} k_dpu_qlt_out_t;
+```
+
+【成员】
+
+| 成员名称 | 描述 |
+|-------------------------|--------------------------------------------------------|
+| valid | K_TRUE:表明输出结果有效; K_FALSE:表明输出结果无效。 |
+| qlt_length | 质量检测输出结果长度。 |
+| sad_disp_length | 粗细列视差(初始分辨率)输出结果长度。 |
+| init_sad_disp_length | 初始行列式差输出结果长度。 |
+| qlt_phys_addr | 质量检测输出结果物理地址。 |
+| qlt_virt_addr | 质量检测输出结果虚拟地址。 |
+| sad_disp_phys_addr | 粗细列视差(初始分辨率)输出结果物理地址。 |
+| sad_disp_virt_addr | 粗细列视差(初始分辨率)输出结果虚拟地址。 |
+| init_sad_disp_phys_addr | 初始行列式差输出结果物理地址。 |
+| init_sad_disp_virt_addr | 初始行列式差输出结果虚拟地址。 |
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+[k_dpu_chn_lcn_result_t](#3110-k_dpu_chn_lcn_result_t)
+[kd_mpi_dpu_get_frame](#2115-kd_mpi_dpu_get_frame)
+
+### 3.2 长短周期参数类型
+
+本模块有如下数据类型:
+
+- [k_dpu_long_parameter_t](#321-k_dpu_long_parameter_t)
+- [k_dpu_short_parameter_t](#322-k_dpu_short_parameter_t)
+
+#### 3.2.1 k_dpu_long_parameter_t
+
+【说明】
+
+dpu 长周期参数结构体
+
+【定义】
+
+```c
+typedef struct
+{
+ /* virtual address */
+ float* row_start_p0; /**< 粗搜索:TyTz行偏差补偿后起始行序号指针,数组最大长度:1920,取值范围:0.0-1920.0,浮点型:0.02精度 */
+ float* row_end_p0; /**< 粗搜索:TyTz行偏差补偿后末尾行序号指针,数组最大长度:1920,取值范围:0.0-1920.0,浮点型:0.02精度 */
+ float* row_start_p1; /**< 细搜索:TyTz行偏差补偿后起始行序号指针,数组最大长度:1920,取值范围:0.0-1920.0,浮点型:0.02精度 */
+ float* row_end_p1; /**< 细搜索:TyTz行偏差补偿后末尾行序号指针,数组最大长度:1920,取值范围:0.0-1920.0,浮点型:0.02精度 */
+ k_u8 *row_start; /**< TyTz行偏差补偿后起始行序号指针,数组最大长度:1920,取值范围:0-1920,整型 */
+ k_u8 *row_end; /**< TyTz行偏差补偿后末尾行序号指针,数组最大长度:1920,取值范围:0-1920,整型 */
+ float *row_offset; /**< 温度行偏差补偿量指针,数组最大长度:1920,取值范围:-32.0~32.0,浮点型:0.02精度 */
+ float *col_offset; /**< 温度列偏差补偿量指针,数组最大长度:1280,取值范围:-32.0~32.0,浮点型:0.02精度 */
+
+ k_u8 *row_start_disp; /**< 视差图对齐计算时,每一切块起始行序号指针,数组最大长度:1920,取值范围:0-1920,整型 */
+ k_u8 *row_end_disp; /**< 视差图对齐计算时,每一切块末尾行序号指针,数组最大长度:1920,取值范围:0-1920,整型 */
+ k_u8 *row_start_ir; /**< 红外图对齐计算时,每一切块起始行序号指针,数组最大长度:1920,取值范围:0-1920,整型 */
+ k_u8 *row_end_ir; /**< 红外图对齐计算时,每一切块末尾行序号指针,数组最大长度:1920,取值范围:0-1920,整型 */
+ float *depth_K; /**< 深度数值计算参数K指针,数组最大长度:1280,取值范围:500.0~1500000.0,浮点型:0.1精度 */
+ float *align_A; /**< 视差对齐参数A指针,数组最大长度:1280,取值范围:-10.0~10.0,浮点型:0.001精度 */
+ float *align_B; /**< 视差对齐参数B指针,数组最大长度:1280,取值范围:-10.0~10.0,浮点型:0.001精度 */
+ float *align_C; /**< 视差对齐参数C指针,数组最大长度:1280,取值范围:-10.0~10.0,浮点型:0.001精度 */
+ float *align_D; /**< 视差对齐参数D指针,数组最大长度:1280,取值范围:-10.0~10.0,浮点型:0.001精度 */
+ float *align_E; /**< 视差对齐参数E指针,数组最大长度:1280,取值范围:-10.0~10.0,浮点型:0.001精度 */
+ float *align_F; /**< 视差对齐参数F指针,数组最大长度:1280,取值范围:-10.0~10.0,浮点型:0.001精度 */
+ float *depth_P; /**< 深度数值计算参数P指针,数组最大长度:1280,取值范围:5e-7~2e-3,浮点型:1e-8精度 */
+ k_u16* block_row_start_ir; /**< 三图对齐:红外图对齐时,每一分块起始行序号指针,数组最大长度:1920,取值范围:0-1920,整型 */
+ k_u16* block_row_end_ir; /**< 三图对齐:红外图对齐时,每一分块末尾行序号指针,数组最大长度:1920,取值范围:0-1920,整型 */
+ k_u16* block_row_start_disp; /**< 三图对齐:视差图对齐时,每一分块起始行序号指针,数组最大长度:1920,取值范围:0-1920,整型 */
+ k_u16* block_row_end_disp; /**< 三图对齐:视差图对齐时,每一分块末尾行序号指针,数组最大长度:1920,取值范围:0-1920,整型 */
+ float mat_R[3]; /**< 三图对齐:红外相机相对彩色相机旋转矩阵,3*1数组,值域范围:-1.0~1.0,浮点型:0.01精度 */
+ float mat_T[3]; /**< 三图对齐:红外相机相对彩色相机平移矩阵,3*1数组,值域范围:-250.0~250.0,浮点型:0.01精度 */
+
+ /* physical address */
+ k_u64 row_start_p0_phys; /**< 粗搜索:TyTz行偏差补偿后起始行序号指针,数组最大长度:1920,取值范围:0.0-1920.0,浮点型:0.02精度 */
+ k_u64 row_end_p0_phys; /**< 粗搜索:TyTz行偏差补偿后末尾行序号指针,数组最大长度:1920,取值范围:0.0-1920.0,浮点型:0.02精度 */
+ k_u64 row_start_p1_phys; /**< 细搜索:TyTz行偏差补偿后起始行序号指针,数组最大长度:1920,取值范围:0.0-1920.0,浮点型:0.02精度 */
+ k_u64 row_end_p1_phys; /**< 细搜索:TyTz行偏差补偿后末尾行序号指针,数组最大长度:1920,取值范围:0.0-1920.0,浮点型:0.02精度 */
+ k_u64 row_start_phys; /**< TyTz行偏差补偿后起始行序号指针,数组最大长度:1920,取值范围:0-1920,整型 */
+ k_u64 row_end_phys; /**< TyTz行偏差补偿后末尾行序号指针,数组最大长度:1920,取值范围:0-1920,整型 */
+ k_u64 row_offset_phys; /**< 温度行偏差补偿量指针,数组最大长度:1920,取值范围:-32.0~32.0,浮点型:0.02精度 */
+ k_u64 col_offset_phys; /**< 温度列偏差补偿量指针,数组最大长度:1280,取值范围:-32.0~32.0,浮点型:0.02精度 */
+
+ k_u64 row_start_disp_phys; /**< 视差图对齐计算时,每一切块起始行序号指针,数组最大长度:1920,取值范围:0-1920,整型 */
+ k_u64 row_end_disp_phys; /**< 视差图对齐计算时,每一切块末尾行序号指针,数组最大长度:1920,取值范围:0-1920,整型 */
+ k_u64 row_start_ir_phys; /**< 红外图对齐计算时,每一切块起始行序号指针,数组最大长度:1920,取值范围:0-1920,整型 */
+ k_u64 row_end_ir_phys; /**< 红外图对齐计算时,每一切块末尾行序号指针,数组最大长度:1920,取值范围:0-1920,整型 */
+ k_u64 depth_K_phys; /**< 深度数值计算参数K指针,数组最大长度:1280,取值范围:500.0~1500000.0,浮点型:0.1精度 */
+ k_u64 align_A_phys; /**< 视差对齐参数A指针,数组最大长度:1280,取值范围:-10.0~10.0,浮点型:0.001精度 */
+ k_u64 align_B_phys; /**< 视差对齐参数B指针,数组最大长度:1280,取值范围:-10.0~10.0,浮点型:0.001精度 */
+ k_u64 align_C_phys; /**< 视差对齐参数C指针,数组最大长度:1280,取值范围:-10.0~10.0,浮点型:0.001精度 */
+ k_u64 align_D_phys; /**< 视差对齐参数D指针,数组最大长度:1280,取值范围:-10.0~10.0,浮点型:0.001精度 */
+ k_u64 align_E_phys; /**< 视差对齐参数E指针,数组最大长度:1280,取值范围:-10.0~10.0,浮点型:0.001精度 */
+ k_u64 align_F_phys; /**< 视差对齐参数F指针,数组最大长度:1280,取值范围:-10.0~10.0,浮点型:0.001精度 */
+ k_u64 depth_P_phys; /**< 深度数值计算参数P指针,数组最大长度:1280,取值范围:5e-7~2e-3,浮点型:1e-8精度 */
+ k_u64 block_row_start_ir_phys; /**< 三图对齐:红外图对齐时,每一分块起始行序号指针,数组最大长度:1920,取值范围:0-1920,整型 */
+ k_u64 block_row_end_ir_phys; /**< 三图对齐:红外图对齐时,每一分块末尾行序号指针,数组最大长度:1920,取值范围:0-1920,整型 */
+ k_u64 block_row_start_disp_phys;/**< 三图对齐:视差图对齐时,每一分块起始行序号指针,数组最大长度:1920,取值范围:0-1920,整型 */
+ k_u64 block_row_end_disp_phys; /**< 三图对齐:视差图对齐时,每一分块末尾行序号指针,数组最大长度:1920,取值范围:0-1920,整型 */
+ k_u64 mat_R_phys; /**< 三图对齐:红外相机相对彩色相机旋转矩阵,3*1数组,值域范围:-1.0~1.0,浮点型:0.01精度 */
+ k_u64 mat_T_phys; /**< 三图对齐:红外相机相对彩色相机平移矩阵,3*1数组,值域范围:-250.0~250.0,浮点型:0.01精度 */
+} k_dpu_long_parameter_t;
+```
+
+【注意事项】
+
+- 用户需要对长周期参数中的值进行改变时,应该使用虚拟地址成员变量。
+
+【相关数据类型及接口】
+
+[k_dpu_dev_param_t](#312-k_dpu_dev_param_t)
+[kd_mpi_dpu_parse_file](#213-kd_mpi_dpu_parse_file)
+[kd_mpi_dpu_set_dev_attr](#214-kd_mpi_dpu_set_dev_attr)
+
+#### 3.2.2 k_dpu_short_parameter_t
+
+【说明】
+
+dpu 短周期参数结构体
+
+【定义】
+
+短周期参数成员过多,不在此展示,可以参见 K230_SDK 中 k_dpu_comm.h 中的结构体 k_dpu_short_parameter_t。
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+[k_dpu_dev_param_t](#312-k_dpu_dev_param_t)
+[kd_mpi_dpu_set_dev_attr](#214-kd_mpi_dpu_set_dev_attr)
+[kd_mpi_dpu_get_dev_attr](#215-kd_mpi_dpu_get_dev_attr)
+
+## 4. 错误码
+
+### 4.1 dpu 错误码
+
+表 41
+
+| 错误代码 | 宏定义 | 描述 |
+|-------------|-------------------------|------------------------------|
+| 0xa00118001 | K_ERR_DPU_INVALID_DEVID | 无效的设备号 |
+| 0xa00118002 | K_ERR_DPU_INVALID_CHNID | 无效的通道号 |
+| 0xa00118003 | K_ERR_DPU_ILLEGAL_PARAM | 参数错误 |
+| 0xa00118004 | K_ERR_DPU_EXIST | DPU 设备已经存在 |
+| 0xa00118005 | K_ERR_DPU_UNEXIST | DPU 设备不存在 |
+| 0xa00118006 | K_ERR_DPU_NULL_PTR | 空指针错误 |
+| 0xa00118007 | K_ERR_DPU_NOT_CONFIG | 尚未配置 DPU |
+| 0xa00118008 | K_ERR_DPU_NOT_SUPPORT | 不支持的功能 |
+| 0xa00118009 | K_ERR_DPU_NOT_PERM | 操作不允许 |
+| 0xa0011800c | K_ERR_DPU_NOMEM | 分配内存失败,如系统内存不足 |
+| 0xa0011800d | K_ERR_DPU_NOBUF | BUFF 不足 |
+| 0xa0011800e | K_ERR_DPU_BUF_EMPTY | BUFF 为空 |
+| 0xa0011800f | K_ERR_DPU_BUF_FULL | BUFF 已满 |
+| 0xa00118010 | K_ERR_DPU_NOTREADY | 设备未就绪 |
+| 0xa00118011 | K_ERR_DPU_BADADDR | 错误的地址 |
+| 0xa00118012 | K_ERR_DPU_BUSY | DPU 处与忙状态 |
+
+## 5. 调试信息
+
+### 5.1 概述
+
+调试信息采用了 proc 文件系统,可实时反映当前系统的运行状态,所记录的信息可供问题定位及分析时使用
+
+【文件目录】
+
+/proc/
+
+【文件清单】
+
+| 文件名称 | 描述 |
+|-----------|-----------------------------|
+| umap/dpu | 记录当前 dpu 模块的一些信息 |
+
+### 5.2 调试信息
+
+【调试信息】
+
+```shell
+----------------------DPU Device Information----------------------
+--------------------Pathway Switch Information--------------------
+downScale: false align: false
+align_ir: false align_rgbCoord: false
+depthout: false denoise: false
+median_p0: false median_denoise: false
+median_post: false median_ir: false
+check: false
+
+----------------------Image Size Information----------------------
+width_speckle: 0 height_speckle: 0
+width_color: 0 height_color: 0
+width_output: 0 height_output: 0
+
+---------------------Result Length Information--------------------
+sad_disp_x: 0 init_sad_disp_xy: 0
+quanlity_check: 0 ir: 0
+disp/depth: 0
+
+----------------------------Frame Count---------------------------
+from open to close, dpu has send 0 frames
+```
+
+【通路选择信息】
+
+| 参数 | **描述** |
+|----------------|---------------------------------------|
+| downScale | 是否粗搜索降分辨率 |
+| align | 是否三图对齐 |
+| align_ir | 是否红外图对齐 |
+| align_rgbCoord | 是否视差数值对齐到彩色图坐标系 |
+| depthout | 是否输出深度图 |
+| denoise | 是否视差图去噪 |
+| median_p0 | 是否粗搜索中值滤波 |
+| median_denoise | 是否视差去噪内部中值滤波 |
+| median_post | 是否视差后处理/三图对齐视差图中值滤波 |
+| median_ir | 是否三图对齐红外图中值滤波 |
+| check | 是否物体散斑图质量检测及初始搜索 |
+
+【图像大小信息】
+
+| 参数 | **描述** |
+|----------------|------------------------------------|
+| width_speckle | 原始散斑图/红外图宽度像素数 |
+| height_speckle | 原始散斑图/红外图高度像素数 |
+| width_color | 原始彩色图宽度像素数 |
+| height_color | 原始彩色图高度像素数 |
+| width_output | 输出视差图/深度图/红外图宽度像素数 |
+| height_output | 输出视差图/深度图/红外图高度像素数 |
+
+【结果长度信息】
+
+| 参数 | **描述** |
+|------------------|----------------------------------|
+| sad_disp_x | 粗细列视差(初始分辨率)结果长度 |
+| init_sad_disp_xy | 初始行列视差输出结果长度 |
+| quanlity_check | 质量检测结果长度 |
+| ir | 红外图结果长度 |
+| disp/depth | 视差图/深度图结果长度 |
+
+调测信息需要在 dpu 运行过程中查看,dpu 结束运行以后,当前所有信息会重置为零。
+
+## 6. demo 描述
+
+### 6.1 dpu demo 简介
+
+dpu demo 实现了绑定和非绑定两种模式。在 msh 中输入 /bin/sample_dpu.elf 执行非绑定模式,运行十帧后结束;在 msh 中输入 /bin/sample_dpu.elf BOUND 执行绑定模式,以 vvi 作为模拟上级不停的输入数据给 dpu,dpu 计算完成后显示信息。
+
+### 6.2 Feature 说明
+
+demo 中包含了初始化和删除 dpu,从配置文件解析参数,配置设备属性,配置通道属性,启动和暂停设备,启动和暂停通道,输入输出数据,pipeline 绑定等功能。
+
+#### 6.2.1 非绑定模式
+
+通过调用 API 完成 dpu 设备的初始化,从配置文件中解析参数,根据解析参数配置设备属性,调用 API 设置参考图和模板图,启动 dpu 设备,配置散斑图和红外图通道属性,启动通道,循环输入十帧并比对结果后停止,停止通道,停止设备,删除设备。
+
+#### 6.2.2 绑定模式
+
+通过调用 API 完成 dpu 设备的初始化,从配置文件中解析参数,绑定 vvi 和 dpu 通道,根据解析参数配置设备属性,调用 API 设置参考图和模板图,启动 dpu 设备,配置散斑图和红外图通道属性,启动 dpu 通道,启动 vvi 通道,vvi 作为模拟上级数据不停的输入数据给 dpu。用户输入 e 以后停止通道和设备。
+
+#### 6.2.3 编译和执行
+
+编译和执行可以参考文档《K230 SDK Demo使用指南》。
diff --git "a/zh/01_software/board/mpp/K230_GPU_API\345\217\202\350\200\203.md" "b/zh/01_software/board/mpp/K230_GPU_API\345\217\202\350\200\203.md"
new file mode 100644
index 0000000..d24a7ed
--- /dev/null
+++ "b/zh/01_software/board/mpp/K230_GPU_API\345\217\202\350\200\203.md"
@@ -0,0 +1,1059 @@
+# K230 GPU API参考
+
+
+
+版权所有©2023北京嘉楠捷思信息技术有限公司
+
+
+
+## 免责声明
+
+您购买的产品、服务或特性等应受北京嘉楠捷思信息技术有限公司(“本公司”,下同)及其关联公司的商业合同和条款的约束,本文档中描述的全部或部分产品、服务或特性可能不在您的购买或使用范围之内。除非合同另有约定,本公司不对本文档的任何陈述、信息、内容的正确性、可靠性、完整性、适销性、符合特定目的和不侵权提供任何明示或默示的声明或保证。除非另有约定,本文档仅作为使用指导参考。
+
+由于产品版本升级或其他原因,本文档内容将可能在未经任何通知的情况下,不定期进行更新或修改。
+
+## 商标声明
+
+、“嘉楠”和其他嘉楠商标均为北京嘉楠捷思信息技术有限公司及其关联公司的商标。本文档可能提及的其他所有商标或注册商标,由各自的所有人拥有。
+
+**版权所有 © 2023北京嘉楠捷思信息技术有限公司。保留一切权利。**
+非经本公司书面许可,任何单位和个人不得擅自摘抄、复制本文档内容的部分或全部,并不得以任何形式传播。
+
+
+
+## 目录
+
+[TOC]
+
+## 前言
+
+### 概述
+
+本文档描述K230芯片2.5D GPU模块的使用指南。
+
+### 读者对象
+
+本文档(本指南)主要适用于以下人员:
+
+- 技术支持工程师
+- 软件开发工程师
+
+### 缩略词定义
+
+| 简称 | 全称 |
+|------|-----------------------|
+| GPU | Graphics Process Unit |
+| BLIT | Bit Block Transfer |
+| CLUT | Color Look Up Table |
+
+### 修订记录
+
+| 版本版本号 | 修改说明 | 修改者 | 日期 |
+|------------|----------|--------|------------|
+| V1.0 | 正式发布 | 黄子懿 | 2023/04/06 |
+| V1.1 | 调整格式 | 黄子懿 | 2023/05/06 |
+
+## 1. 功能介绍
+
+本模块主要用于加速矢量图形的绘制,可用于绘制菜单等页面等,支持加速部分lvgl绘制。GPU有一系列绘制指令,将绘制指令写入内存,提交地址及指令总长度给GPU后即可开始绘制。本模块支持多边形、二次贝塞尔曲线、三次贝塞尔曲线和椭圆曲线的填充绘制,支持线性渐变色填充,支持颜色查找表,支持图像合成和混合以及BLIT。
+
+## 2. 数据流向
+
+GPU软件驱动部分包括设备/dev/vg_lite及其内核模块驱动程序vg_lite.ko,以及用户态函数库libvg_lite.so,libvg_lite.so会打开/dev/vg_lite设备,通过ioctl()及mmap()与内核态的驱动程序进行交互。内核态驱动主要由vg_lite_hal.c实现,vg_lite.c中的函数通过vg_lite_kernel函数调用vg_lite_hal.c中的函数,执行实际的寄存器操作。
+
+注意:驱动不会检查绘制指令中的物理地址,调用VGLite API可以间接读写DDR内存的所有物理地址。
+
+## 3. 软件接口
+
+软件接口详见软件包中的头文件vg_lite.h。
+
+### 3.1 主要类型及定义
+
+#### 3.1.1 参数类型
+
+| 名称 | 类型定义 | 含义 |
+|------------------|------------------------|-----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------|
+| Int32_t | int | 32位有符号整数 |
+| uint32_t | Unsigned int | 32位无符号整数 |
+| VG_LITE_S8 | enum vg_lite_format_t | 8位有符号整数坐标 |
+| VG_LITE_S16 | enum vg_lite_format_t | 16位有符号整数坐标 |
+| VG_LITE_S32 | enum vg_lite_format_t | 32位有符号整数坐标 |
+| vg_lite_float_t | float | 单精度浮点数 |
+| vg_lite_color_t | uint32_t | 32位颜色值 颜色值指定了各种功能中使用的颜色。颜色是用8位RGBA通道形成的。红色通道在颜色值的最低8位,其次是绿色和蓝色通道。alpha通道在颜色值的最高8位。 对于L8目标格式,通过使用默认的ITU-R BT.709转换规则将RGB颜色转换为L8。 |
+
+#### 3.1.2 错误类型 vg_lite_error_t
+
+| 枚举 | 描述 |
+|----------------------------|----------------------|
+| VG_LITE_GENERIC_IO | 无法与内核驱动通信 |
+| VG_LITE_INVALID_ARGUMENT | 非法参数 |
+| VG_LITE_MULTI_THREAD_FAIL | 多线程错误 |
+| VG_LITE_NO_CONTEXT | 无上下文错误 |
+| VG_LITE_NOT_SUPPORT | 功能不支持 |
+| VG_LITE_OUT_OF_MEMORY | 无可分配的驱动堆内存 |
+| VG_LITE_OUT_OF_RESOURCES | 无可分配的系统堆内存 |
+| VG_LITE_SUCCESS | 成功 |
+| VG_LITE_TIMEOUT | 超时 |
+| VG_LITE_ALREADY_EXISTS | 对象已存在 |
+| VG_LITE_NOT_ALIGNED | 数据对齐错误 |
+
+#### 3.1.3 功能枚举
+
+| 枚举 | 描述 |
+|-----------------------------------|---------------|
+| gcFEATURE_BIT_VG_BORDER_CULLING | 边界剪裁 |
+| gcFEATURE_BIT_VG_GLOBAL_ALPHA | 全局Alpha |
+| gcFEATURE_BIT_VG_IM_FASTCLEAR | 快速清除 |
+| gcFEATURE_BIT_VG_IM_INDEX_FORMAT | 颜色索引 |
+| gcFEATURE_BIT_VG_PE_PREMULTIPLY | Alpha通道预乘 |
+| gcFEATURE_BIT_VG_RADIAL_GRADIENT | 径向灰度 |
+| gcFEATURE_BIT_VG_RGBA2_FORMAT | RGBA2222格式 |
+
+### 3.2 GPU控制
+
+如果没有特殊说明,那么在调用任何API函数之前,应用程序必须通过调用[vg_lite_init](#3212-vg_lite_init)来初始化GPU隐式(全局)上下文,该函数将填充特征表、重置快速清除缓冲区、重置合成目标缓冲区,以及分配命令和细分缓冲区。
+
+GPU驱动程序**只支持一个当前上下文和一个线程来向GPU发布命令**。GPU驱动程序不支持在多个线程/进程中同时运行的多个并发上下文,因为GPU内核驱动程序不支持上下文切换。GPU应用程序在任何时候都只能使用一个上下文来向GPU硬件发出命令。如果GPU应用程序需要切换上下文,应该调用[vg_lite_close](#3213-vg_lite_close)来关闭当前线程中的当前上下文,然后可以调用[vg_lite_init](#3212-vg_lite_init)来初始化当前线程中或其他线程/进程中的新上下文。
+
+如果没有特殊说明,则所有函数都返回[vg_lite_error_t](#312-错误类型-vg_lite_error_t)。
+
+#### 3.2.1 上下文初始化和控制函数
+
+##### 3.2.1.1 vg_lite_set_command_buffer_size
+
+- 描述
+
+ 这个函数是可选的。如果需要修改命令缓冲区的大小,必须在vg_lite_init前调用。命令缓冲区大小默认为64KB,这并不是说一帧的命令就必须小于64KB,当缓冲区填满时会直接提交渲染以清空缓冲区,更大的缓冲区意味着更低频率的渲染提交,可以减少系统调用开销。
+
+- 参数
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|----------------|-----------|
+| size | 命令缓冲区长度 | 输入 |
+
+##### 3.2.1.2 vg_lite_init
+
+- 描述
+
+ 该函数初始化GPU绘图/填充功能所需的内存和数据结构,为命令缓冲区和指定大小的嵌片缓冲区分配内存。嵌片缓冲区的宽度和高度必须是16的倍数。嵌片窗口可以根据系统中可用的内存量和所需的性能来指定。一个较小的窗口可以有较少的内存占用,但可能会导致较低的性能。可用于镶嵌的最小窗口是16x16。如果高度或宽度小于0,那么就不会创建嵌片缓冲区,可以用于只有填充的情况。
+
+ 如果这将是第一个访问硬件的上下文,硬件将被打开并初始化。如果需要初始化一个新的上下文,必须调用vg_lite_close来关闭当前的上下文。否则,vg_lite_init将返回一个错误。
+
+- 参数
+
+| 参数名称 | 描述 | 输入/输出 |
+|---------------------|--------------------------------------------------------------------------------------------------------------------|-----------|
+| tessellation_width | 嵌片窗口宽度。必须是16的整数倍,最小为16,最大不能大于帧宽度,如果为0表示不使用tessellation,那么GPU将只运行blit。 | 输入 |
+| tessellation_height | 嵌片窗口高度。必须是16的整数倍,最小为16,最大不能大于帧宽度,如果为0表示不使用tessellation,那么GPU将只运行blit。 | 输入 |
+
+##### 3.2.1.3 vg_lite_close
+
+- 描述
+
+ 删除所有的资源,并释放先前由vg_lite_init函数初始化的所有内存。如果这是唯一的活动上下文,它还会自动关闭硬件。
+
+##### 3.2.1.4 vg_lite_finish
+
+- 描述
+
+ 这个函数明确地将命令缓冲区提交给GPU,并等待其完成。
+
+##### 3.2.1.5 vg_lite_flush
+
+- 描述
+
+ 这个函数明确地将命令缓冲区提交给GPU,而不等待它的完成。
+
+#### 3.2.2 像素缓冲区
+
+##### 3.2.2.1 内存对齐要求
+
+###### 3.2.2.1.1 源图像对齐要求
+
+GPU硬件要求光栅化图像的宽度是16像素的倍数。这一要求适用于所有图像格式。因此,用户需要将任意的图像宽度垫成16像素的倍数,以便GPU硬件能够正确工作。
+
+像素的字节对齐要求取决于具体的像素格式。
+
+| 图像格式 | 每像素比特数 | 对齐要求 | 支持作为源图像 | 支持作为目标图像 |
+|-----------------------------|--------------|----------|----------------|------------------|
+| VG_LITE_INDEX1 | 1 | 8B | 是 | 否 |
+| VG_LITE_INDEX2 | 2 | 8B | 是 | 否 |
+| VG_LITE_INDEX4 | 4 | 8B | 是 | 否 |
+| VG_LITE_INDEX8 | 8 | 16B | 是 | 否 |
+| VG_LITE_A4 | 4 | 8B | 是 | 否 |
+| VG_LITE_A8 | 8 | 16B | 是 | 是 |
+| VG_LITE_L8 | 8 | 16B | 是 | 是 |
+| VG_LITE_ARGB2222组 | 8 | 16B | 是 | 是 |
+| VG_LITE_RGB565组 | 16 | 32B | 是 | 是 |
+| VG_LITE_ARGB1555组 | 16 | 32B | 是 | 是 |
+| VG_LITE_ARGB4444组 | 16 | 32B | 是 | 是 |
+| VG_LITE_ARGB8888/XRGB8888组 | 32 | 64B | 是 | 是 |
+
+###### 3.2.2.1.2 渲染目标缓冲区对齐要求
+
+GPU硬件要求像素缓冲区的宽度是16像素的倍数。这一要求适用于所有图像格式。因此,用户需要将任意的像素缓冲区宽度对齐成16像素的倍数,以便GPU硬件能够正确工作。像素的字节对齐要求取决于具体的像素格式。
+
+请参阅本文件后面的对齐说明表2:图像源对齐摘要。
+
+像素缓冲区的起始地址对齐要求取决于缓冲区布局格式是平铺还是线性(vg_lite_buffer_layout_t enum)。
+
+\- 如果格式是平铺(4x4平铺),起始地址和stride需要64字节对齐。
+
+\- 如果格式是线性的,起始地址和stride没有对齐要求。
+
+##### 3.2.2.2 像素缓存
+
+GPU包括两个完全关联的高速缓存。每个缓存有8行,每行有64字节。在这种情况下,一个缓存行可以容纳一个4x4像素的Tile或一个16x1像素的行。
+
+#### 3.2.3 枚举类型
+
+##### 3.2.3.1 vg_lite_buffer_format_t
+
+- 这个枚举类型指定了用于缓冲区的颜色格式。
+
+ 注意:关于图像格式的对齐要求汇总,请参见数值描述后的[内存对齐要求](#3221-内存对齐要求)。
+
+| vg_lite_buffer_format_t | 描述 | 支持作为源 | 支持作为目标 | 对齐(字节) |
+|-------------------------|-------------------------------|------------|--------------|--------------|
+| VG_LITE_ABGR8888 | 每个通道8bits,alpha在低8bits | 是 | 是 | 64 |
+| VG_LITE_ARGB8888 | | 是 | 是 | 64 |
+| VG_LITE_BGRA8888 | | 是 | 是 | 64 |
+| VG_LITE_RGBA8888 | | 是 | 是 | 64 |
+| VG_LITE_BGRX8888 | | 是 | 是 | 64 |
+| VG_LITE_RGBX8888 | | 是 | 是 | 64 |
+| VG_LITE_XBGR8888 | | 是 | 是 | 64 |
+| VG_LITE_XRGB8888 | | 是 | 是 | 64 |
+| VG_LITE_ABGR1555 | | 是 | 是 | 32 |
+| VG_LITE_ARGB1555 | | 是 | 是 | 32 |
+| VG_LITE_BGRA5551 | | 是 | 是 | 32 |
+| VG_LITE_RGBA5551 | | 是 | 是 | 32 |
+| VG_LITE_BGR565 | | 是 | 是 | 32 |
+| VG_LITE_RGB565 | | 是 | 是 | 32 |
+| VG_LITE_ABGR4444 | | 是 | 是 | 32 |
+| VG_LITE_ARGB4444 | | 是 | 是 | 32 |
+| VG_LITE_BGRA4444 | | 是 | 是 | 32 |
+| VG_LITE_RGBA4444 | | 是 | 是 | 32 |
+| VG_LITE_A4 | 4bits alpha, 无RGB | 是 | 否 | 8 |
+| VG_LITE_A8 | 8bits alpha, 无RGB | 是 | 是 | 16 |
+| VG_LITE_ABGR2222 | | 是 | 是 | 16 |
+| VG_LITE_ARGB2222 | | 是 | 是 | 16 |
+| VG_LITE_BGRA2222 | | 是 | 是 | 16 |
+| VG_LITE_RGBA2222 | | 是 | 是 | 16 |
+| VG_LITE_INDEX_1 | 1-bit 索引格式 | 是 | 否 | 8 |
+| VG_LITE_INDEX_2 | 2-bit索引格式 | 是 | 否 | 8 |
+| VG_LITE_INDEX_4 | 4-bit索引格式 | 是 | 否 | 8 |
+| VG_LITE_INDEX_8 | 8-bit索引格式 | 是 | 否 | 8 |
+
+##### 3.2.3.2 vg_lite_buffer_image_mode_t
+
+- 指定如何将图像渲染到缓冲区。
+
+| 枚举 | 描述 |
+|-----------------------------|----------------------|
+| VG_LITE_NORMAL_IMAGE_MODE | 用混合模式绘制的图像 |
+| VG_LITE_NONE_IMAGE_MODE | 图像输入被忽略 |
+| VG_LITE_MULTIPLY_IMAGE_MODE | 图像与绘制颜色相乘 |
+
+##### 3.2.3.3 vg_lite_buffer_layout_t
+
+- 指定内存中的缓冲区数据布局。
+
+| 枚举 | 描述 |
+|----------------|-----------------------------------------------------------------------------------------|
+| VG_LITE_LINEAR | 线性(扫描线)布局。注意:这种布局对缓冲区没有对齐要求。 |
+| VG_LITE_TILED | 数据被组织成4x4像素的嵌片。注意:对于这种布局,缓冲区的起始地址和跨度需要以64字节对齐。 |
+
+##### 3.2.3.4 vg_lite_buffer_transparency_mode_t
+
+- 指定一个缓冲区的透明模式。
+
+| 枚举 | 描述 |
+|---------------------------|------------------------------------------------------------------------------------------------------------------------------------------------|
+| VG_LITE_IMAGE_OPAQUE | 不透明的图像:所有的图像像素都被复制到VG PE进行光栅化。 |
+| VG_LITE_IMAGE_TRANSPARENT | 透明图像:只有非透明的图像像素被复制到VG PE中。 注意:这种模式只有在图像模式为VG_LITE_NORMAL_IMAGE_MODE或VG_LITE_MULTIPLY_IMAGE_MODE时才有效。 |
+
+#### 3.2.4 结构体
+
+##### 3.2.4.1 vg_lite_buffer_t
+
+- 该结构定义了GPU使用的图像或内存数据的缓冲区布局。
+
+| 字段 | 类型 | 描述 |
+|--------------------|------------------------------------|----------------|
+| width | int32_t | 缓冲区像素宽度 |
+| height | int32_t | 缓冲区像素高度 |
+| stride | int32_t | 一行的字节数 |
+| tiled | vg_lite_buffer_layout_t | 线性或平铺 |
+| format | vg_lite_buffer_format_t | 颜色类型 |
+| handle | void \* | 内存句柄 |
+| memory | void \* | 映射的虚拟地址 |
+| address | uint32_t | 物理地址 |
+| yuv | N/A | N/A |
+| image_mode | vg_lite_buffer_image_mode_t | Blit模式 |
+| transparency_mode | vg_lite_buffer_transparency_mode_t | 透明模式 |
+
+#### 3.2.5 函数
+
+##### 3.2.5.1 vg_lite_allocate
+
+- 描述
+
+ 这个函数用于在blit或draw函数中使用缓冲区之前分配内存。
+
+ 为了让硬件访问一些内存,如源图像或目标缓冲区,需要首先分配。提供的[vg_lite_buffer_t](#3241-vg_lite_buffer_t)结构需要用所请求的缓冲区的大小(宽度和高度)和格式进行初始化。如果stride被设置为0,这个函数将把它填进去。这个函数的唯一输入参数是指向缓冲区结构的指针。如果该结构有所有需要的信息,将为该缓冲区分配适当的内存。
+
+ 这个函数将调用内核来实际分配内存。[vg_lite_buffer_t](#3241-vg_lite_buffer_t)结构中的内存句柄、逻辑地址和硬件地址将由内核填入。
+
+- 参数
+
+ [vg_lite_buffer_t](#3241-vg_lite_buffer_t) \*buffer: 指向缓冲区的指针,该指针持有被分配的缓冲区的大小和格式。
+
+##### 3.2.5.2 vg_lite_free
+
+- 描述
+
+ 这个函数用来取消先前分配的缓冲区,释放出该缓冲区的内存。
+
+- 参数
+
+ [vg_lite_buffer_t](#3241-vg_lite_buffer_t) \*buffer: 指向被vg_lite_allocate填入的缓冲区结构的指针。
+
+##### 3.2.5.3 vg_lite_buffer_upload
+
+- 描述
+
+ 该函数将像素数据上传到GPU内存。注意,要上传的数据(像素)的格式必须与缓冲区对象中描述的相同。输入的数据内存缓冲区应该包含足够的数据,以便上传到输入参数 "buffer "所指向的GPU缓冲区。
+
+- 参数
+
+ vg_lite_buffer_t \*buffer: 指向被vg_lite_allocate填入的缓冲区结构的指针。
+
+ uint8_t \*data\[3\]: 指向像素数据的指针。
+
+ uint32_t stride\[3\]: 像素数据的行跨度。
+
+##### 3.2.5.4 vg_lite_map
+
+- 描述
+
+ 这个函数是用来为一个特定的缓冲区适当地映射内存。它将被用来对GPU需要的缓冲区的物理地址进行适当的转换。
+
+ 如果你想直接使用一个帧缓冲区作为目标缓冲区,你需要用一个[vg_lite_buffer_t](#3241-vg_lite_buffer_t)结构包裹它,并调用内核将提供的逻辑或物理地址映射到硬件可访问的内存中。例如,如果你知道帧缓冲区的逻辑地址,用这个地址设置[vg_lite_buffer_t](#3241-vg_lite_buffer_t)结构的memory字段并调用这个函数。如果你知道物理地址,将memory字段设置为NULL,然后用物理地址对地址字段进行编程。
+
+- 参数
+
+ vg_lite_buffer_t \*buffer: 指向被[vg_lite_allocate](#3251-vg_lite_allocate)填入的缓冲区结构的指针。
+
+##### 3.2.5.5 vg_lite_unmap
+
+- 描述
+
+ 这个函数解除了缓冲区的映射,并释放了之前调用vg_lite_map分配的任何内存资源。
+
+- 参数
+
+ vg_lite_buffer_t \*buffer: 指向被[vg_lite_map](#3254-vg_lite_map)填入的缓冲区结构的指针。
+
+##### 3.2.5.6 vg_lite_set_CLUT
+
+- 描述
+
+ 该函数在上下文状态下为索引彩色图像设置颜色查找表(CLUT)。一旦CLUT被设置(非空),用于索引格式图像渲染的图像像素颜色将根据像素的颜色索引值从颜色查找表(CLUT)中获得。
+
+- 参数
+
+ uint32_t count: 颜色查找表中的颜色计数。
+
+ 对于INDEX_1,表中最多可以有2种颜色。
+
+ 对于INDEX_2,表中最多可以有4种颜色。
+
+ 对于INDEX_4,表中最多可以有16种颜色。
+
+ 对于INDEX_8,表中最多可以有256种颜色。
+
+ uint32_t \*colors: 该指针指向的颜色查找表(CLUT)将被存储在上下文中,并在需要时被编程到命令缓冲区。在命令缓冲区被提交给硬件之前,CLUT不会生效。颜色为ARGB格式,A在最高位。
+
+ 注意:驱动程序不验证来自应用程序的CLUT内容。
+
+### 3.3 矩阵
+
+#### 3.3.1 结构体
+
+##### 3.3.1.1 vg_lite_matrix_t
+
+- 描述
+
+ 定义了一个3x3浮点数矩阵。
+
+#### 3.3.2 函数
+
+##### 3.3.2.1 vg_lite_identity
+
+- 描述
+
+ 将矩阵设为单位矩阵。
+
+- 参数
+
+ vg_lite_matrix_t \*matrix: 指向[vg_lite_matrix_t](#3311-vg_lite_matrix_t)结构体的指针,该结构体将被加载单位矩阵。
+
+##### 3.3.2.2 vg_lite_perspective
+
+- 描述
+
+ 对矩阵进行透视变换。
+
+- 参数
+
+ vg_lite_float_t px: 透视变换矩阵的。
+
+ vg_lite_float_t py: 透视变换矩阵的
+
+ vg_lite_matrix_t \*matrix: 指向将被透视变换的[vg_lite_matrix_t](#3311-vg_lite_matrix_t)结构的指针。
+
+##### 3.3.2.3 vg_lite_rotate
+
+- 描述
+
+ 对矩阵进行指定角度的旋转变换。
+
+- 参数
+
+ vg_lite_float_t degrees: 旋转矩阵的度数(角度制),正数表示顺时针旋转。
+
+ vg_lite_matrix_t \*matrix: 指向将被旋转的[vg_lite_matrix_t](#3311-vg_lite_matrix_t)结构的指针。
+
+##### 3.3.2.4 vg_lite_scale
+
+- 描述
+
+ 对矩阵进行垂直和水平缩放。
+
+- 参数
+
+ vg_lite_float_t scale_x: 水平方向缩放因子。
+
+ vg_lite_float_t scale_y: 竖直方向缩放因子。
+
+ vg_lite_matrix_t \*matrix: 指向将被缩放的[vg_lite_matrix_t](#3311-vg_lite_matrix_t)结构的指针。
+
+##### 3.3.2.5 vg_lite_translate
+
+- 描述
+
+ 对矩阵进行平移变换。
+
+- 参数
+
+ vg_lite_float_t x: 水平方向的平移。
+
+ vg_lite_float_t y: 竖直方向的平移。
+
+ vg_lite_matrix_t \*matrix: 指向将被平移的[vg_lite_matrix_t](#3311-vg_lite_matrix_t)结构的指针。
+
+### 3.4 用于合成和混合的BLITs
+
+#### 3.4.1 枚举类型
+
+##### 3.4.1.1 vg_lite_blend_t
+
+该枚举定义了一些VGLite API函数所支持的混合模式。S和D代表源和目标颜色通道,Sa和Da代表源和目标alpha通道。
+
+颜色以100%和50%的不透明度显示。
+
+| vg_lite_blend_t | 描述 |
+|------------------------|--------------------------|
+| VG_LITE_BLEND_ADDITIVE | S+D |
+| VG_LITE_BLEND_DST_IN | Sa\*D |
+| VG_LITE_BLEND_DST_OVER | (1-Da)\*S+D |
+| VG_LITE_BLEND_MULTIPLY | S\*(1-Da)+D\*(1-Sa)+S\*D |
+| VG_LITE_BLEND_NONE | S |
+| VG_LITE_BLEND_SCREEN | S+D-S\*D |
+| VG_LITE_BLEND_SRC_IN | Da\*S |
+| VG_LITE_BLEND_SRC_OVER | S+(1-Sa)\*D |
+| VG_LITE_BLEND_SUBTRACT | D\*(1-Sa) |
+
+##### 3.4.1.2 vg_lite_filter_t
+
+指定blit和draw APIs中的样本过滤模式。
+
+| vg_lite_filter_t | 描述 |
+|---------------------------|-----------------------------------------------|
+| VG_LITE_FILTER_POINT | 只取最近的图像像素。 |
+| VG_LITE_FILTER_LINEAR | 使用沿水平线的线性内插。 |
+| VG_LITE_FILTER_BI_LINEAR | 在图像像素周围使用一个2x2的盒子,并进行插值。 |
+
+##### 3.4.1.3 vg_lite_global_alpha_t
+
+指定blit APIs中的全局alpha模式。
+
+| vg_lite_global_alpha_t | 描述 |
+|-------------------------|--------------------------------------------------------|
+| VG_LITE_NORMAL | 使用原始的src/dst alpha值。 |
+| VG_LITE_GLOBAL | 使用全局的src/dst alpha值来替换原始的src/dst alpha值。 |
+| VG_LITE_SCALED | 将全局的src/dst alpha值与原src/dst alpha值相乘。 |
+
+#### 3.4.2 结构体
+
+##### 3.4.2.1 vg_lite_rectangle_t
+
+该结构体定义了一个矩形的数据的组织。
+
+| 字段 | 类型 | 描述 |
+|---------|----------|---------------------|
+| x | int32_t | x坐标,左上角为原点 |
+| y | int32_t | Y坐标,左上角为原点 |
+| width | int32_t | 宽度 |
+| height | int32_t | 高度 |
+
+##### 3.4.2.2 vg_lite_point_t
+
+该结构体定义了一个2D点。
+
+| 字段 | 类型 | 描述 |
+|------|----------|-------|
+| x | int32_t | X坐标 |
+| y | int32_t | Y坐标 |
+
+##### 3.4.2.3 vg_lite_point4_t
+
+该结构体定义了四个构成多边形的二维点。这些点是由结构vg_lite_point_t定义的。
+
+| 字段 | 类型 | 描述 |
+|-------------------|---------------|-------------|
+| vg_lite_point\[4\] | int32_t each | 4个点的数组 |
+
+#### 3.4.3 函数
+
+##### 3.4.3.1 vg_lite_blit
+
+- 描述
+
+ BLIT函数。BLIT操作是通过一个源缓冲区和一个目标缓冲区进行的。源缓冲区和目标缓冲区结构是用vg_lite_buffer_t结构体定义的。BLIT用指定的矩阵将源图像复制到目标缓冲区,该矩阵可以包括平移、旋转、缩放和透视校正。注意,vg_lite_buffer_t不支持覆盖采样抗锯齿,所以目标缓冲区的边缘可能不光滑,尤其是旋转矩阵。而路径渲染可以用来实现高质量的覆盖样本抗锯齿(16X,4X)渲染效果。
+
+- 参数
+
+ vg_lite_buffer_t \*target: 指向定义目标缓冲区的vg_lite_buffer_t结构体。关于blit功能的有效目标颜色格式,请参见[源图像对齐要求](#32211-源图像对齐要求)。
+
+ vg_lite_buffer_t \*source: 指向源缓冲区的vg_lite_buffer_t结构体。[vg_lite_buffer_format_t](#3231-vg_lite_buffer_format_t)枚举中的所有颜色格式都是blit函数的有效源格式。
+
+ vg_lite_matrix_t \*matrix: 指向一个vg_lite_matrix_t结构,它定义了源像素到目标像素的3x3变换矩阵。如果矩阵为NULL,则假定是一个单位矩阵,这意味着源像素将被直接复制到目标像素的(0,0)位置。
+
+ vg_lite_blend_t blend: 指定硬件支持的混合模式之一,以应用于每个图像像素。如果不需要混合,将此值设置为VG_LITE_BLEND_NONE。注意:如果"matrix"参数被指定为旋转或透视,而"blend"参数被指定为VG_LITE_BLEND_NONE、VG_LITE_BLEND_SRC_IN或VG_LITE_BLEND_DST_IN时,驱动程序将覆盖应用程序对BLIT操作的设置,透明度模式将始终被设置为TRANSPARENT。这是由于GPU硬件的一些限制。
+
+ vg_lite_color_t color: 如果不为零,这个颜色值被用作混合色。在混合发生之前,混合色会与每个源像素相乘。如果你不需要混合色,把颜色参数设为0。
+
+ vg_lite_filter_t filter: 指定过滤模式的类型。vg_lite_filter_t枚举中的所有格式都是这个函数的有效格式。
+
+##### 3.4.3.2 vg_lite_blit_rect
+
+- 描述
+
+ BLIT矩形函数。
+
+- 参数
+
+ vg_lite_buffer_t \*target: 参考vg_lite_blit。
+
+ vg_lite_buffer_t \*source: 参考vg_lite_blit。
+
+ uint32_t \*rect: 指定要BLIT的矩形区域。
+
+ vg_lite_matrix_t \*matrix: 参考vg_lite_blit。
+
+ vg_lite_blend_t \*blend: 参考vg_lite_blit。
+
+ vg_lite_color_t color: 参考vg_lite_blit。
+
+ vg_lite_filter_t filter: 参考vg_lite_blit。
+
+##### 3.4.3.3 vg_lite_get_transform_matrix
+
+- 描述
+
+ 这个函数从源坐标和目标坐标得到一个3x3的同质变换矩阵。
+
+- 参数
+
+ vg_lite_point4_t src: 指向一组构成源多边形的四个二维点的指针。
+
+ vg_lite_point4_t dst: 指向一组构成目标多边形的四个二维点的指针。
+
+ vg_lite_matrix_t \*mat: 输出参数,指向一个3x3的同质矩阵,将源多边形转换为目标多边形。
+
+##### 3.4.3.4 vg_lite_clear
+
+- 描述
+
+ 这个函数执行清除操作,用一个明确的颜色清除/填充指定的像素缓冲区(整个缓冲区或缓冲区中的部分矩形)。
+
+- 参数
+
+ vg_lite_buffer_t \*target: 参考vg_lite_blit。
+
+ vg_lite_rectangle_t \*rectangle: 指向vg_lite_rectangle_t结构的指针,指定要填充的区域。如果该矩形为NULL,那么整个目标缓冲区将被填充指定的颜色。
+
+ vg_lite_color_t color: 填充的颜色,如vg_lite_color_t枚举中指定的,这是用于填充缓冲区的颜色值。如果缓冲区是L8格式的,RGBA颜色将被转换为亮度值。
+
+#### 3.4.4 全局Alpha函数
+
+##### 3.4.4.1 vg_lite_set_image_global_alpha
+
+- 描述
+
+ 这个函数将设置图像/源全局alpha并返回一个状态错误代码。
+
+- 参数
+
+ vg_lite_global_alpha_t alpha_mode: 全局Alpha模式,参见[vg_lite_global_alpha_t](#3413-vg_lite_global_alpha_t).
+
+ uint32_t alpha_value: 要设置的 图像/源 全局Alpha值。
+
+##### 3.4.4.2 vg_lite_set_dest_global_alpha
+
+- 描述
+
+ 这个函数将设置目标全局alpha,并返回一个状态错误代码。
+
+- 参数
+
+ vg_lite_global_alpha_t alpha_mode: 全局Alpha模式,参见[vg_lite_global_alpha_t](#3413-vg_lite_global_alpha_t).
+
+ uint32_t alpha_value: 要设置的目标全局Alpha值。
+
+### 3.5 矢量路径控制
+
+#### 3.5.1 枚举类型
+
+##### 3.5.1.1 vg_lite_quality_t
+
+指定硬件辅助抗锯齿的级别。
+
+| vg_lite_quality_t | 描述 |
+|--------------------|------------------------------------------------------|
+| VG_LITE_HIGH | 高质量:16倍覆盖率采样抗锯齿 |
+| *VG_LITE_UPPER* | *高质量:8倍覆盖率采样抗锯齿(从2020年6月起取消)。* |
+| VG_LITE_MEDIUM | 中等质量:4倍覆盖率采样抗锯齿 |
+| VG_LITE_LOW | 低质量:无抗锯齿 |
+
+#### 3.5.2 结构体
+
+##### 3.5.2.1 vg_lite_hw_memory
+
+该结构体简单地记录了内核的内存分配信息。
+
+| 字段 | 类型 | 描述 |
+|-----------|-----------|-------------------------------------------------------------------------------------------------|
+| handle | void \* | GPU内存对象句柄 |
+| memory | void \* | 逻辑地址 |
+| address | uint32_t | GPU内存地址 |
+| bytes | uint32_t | 大小 |
+| property | uint32_t | 第0位用于表示路径上传。 0: 禁用路径数据上传(总是嵌入到命令缓冲区)。 1: 启用自动路径数据上传。 |
+
+##### 3.5.2.2 vg_lite_path_t
+
+该结构描述了矢量路径数据。
+
+路径数据由操作码和坐标组成。操作码的格式总是VG_LITE_S8。关于操作码的详细情况,请参考本文件中关于[矢量路径操作码](#354-矢量路径操作码)的部分。
+
+| 字段 | 类型 | 描述 |
+|------------------|------------------------|----------------------------------------------------|
+| bounding_box\[4\] | vg_lite_float_t | 路径的包围盒。 \[0\] 左侧 \[1\] 顶部 \[2\] 右侧 \[3\] 底部 |
+| quality | vg_lite_quality_t | 路径质量的枚举类型,抗锯齿级别 |
+| format | enum vg_lite_format_t | 坐标格式的枚举类型 |
+| uploaded | vg_lite_hw_memory_t | 带有已上传到GPU可寻址内存的路径数据的结构体 |
+| path_length | int32_t | 路径的字节数 |
+| path | void \* | 路径数据指针 |
+| path_changed | int32_t | 0: 未改变; 1: 改变. |
+
+关于坐标格式与数据的对齐方式。
+
+| vg_lite_format_t | 路径数据对齐 |
+|-------------------|--------------|
+| VG_LITE_S8 | 8 bit |
+| VG_LITE_S16 | 2 bytes |
+| VG_LITE_S32 | 4 bytes |
+
+###### 3.5.2.2.1 路径对象的特别说明
+
+- 端序没有影响,因为它是靠边界对齐的。
+- 多个连续的操作码应该按照指定的数据格式的大小进行打包。例如,对于VG_LITE_S16按2个字节打包,对于VG_LITE_S32按4个字节打包。由于操作码是8位(1字节),对于16位(2字节)或32位(4字节)数据类型:
+
+...
+
+\,操作码为8位。
+
+\(对准数据)。
+
+\ \ \
+
+\ \
+
+\\\\
+
+\ \
+
+...
+
+数组中的路径数据应该总是1,2,或4字节对齐,这取决于格式。例如,对于32位(4字节)的数据类型。
+
+...
+
+\\?
+
+\(4个字节)。
+
+\ \
+
+\
+
+\
+
+...
+
+对于float类型,使用IEEE754编码规范,此时操作码仍然为8位有符号整数,可能需要软件进行特殊处理。
+
+#### 3.5.3 函数
+
+##### 3.5.3.1 vg_lite_path_calc_length
+
+- 描述
+
+ 这个函数计算路径命令的缓冲区长度(以字节为单位)。应用程序可以根据这个函数计算的缓冲区长度分配一个缓冲区作为命令缓冲区使用。
+
+- 参数
+
+ uint8_t \*cmd: 指向用于构建路径的操作码数组的指针。
+
+ uint32_t count: 操作码数量。
+
+ vg_lite_format_t format: 坐标数据格式,所有可用于vg_lite_format_t的格式都是该函数的有效格式。
+
+##### 3.5.3.2 vg_lite_path_append
+
+- 描述
+
+ 这个函数为路径组装命令缓冲区,这个函数根据输入的操作码(cmd)和坐标(data)为路径制作最终的GPU命令。
+
+- 参数
+
+ vg_lite_path_t \*path: 指向带有路径定义的vg_lite_path_t结构体的指针。
+
+ uint8_t \*cmd: 指向用于构建路径的操作码数组的指针。
+
+ void \*data: 指向用于构建路径的坐标数据数组的指针。
+
+ uint32_t seg_count: 操作码数量。
+
+##### 3.5.3.3 vg_lite_init_path
+
+- 描述
+
+ 这个函数用指定的值初始化一个路径定义。
+
+- 参数
+
+ vg_lite_path_t \*path: 指向路径对象的vg_lite_path_t结构的指针,要用指定的成员值进行初始化。
+
+ vg_lite_format_t data_format: 坐标数据格式。vg_lite_format_t枚举中的所有格式都是该函数的有效格式。
+
+ vg_lite_quality_t quality: 路径对象的质量。vg_lite_quality_t枚举中的所有格式都是这个函数的有效格式。
+
+ uint32_t path_length: 路径数据的长度(以字节为单位)。
+
+ void \*path_data: 路径数据的指针。
+
+ vg_lite_float_t min_x, vg_lite_float_t min_y, vg_lite_float_t max_x, vg_lite_float_t max_y: 最小和最大的x和y值,指定路径的包围盒。
+
+##### 3.5.3.4 vg_lite_init_arc_path
+
+- 描述
+
+ 这个函数用指定的值初始化一个弧形路径定义。
+
+- 参数
+
+ vg_lite_path_t \*path: 参考vg_lite_init_path。
+
+ vg_lite_format_t data_format: 参考vg_lite_init_path。
+
+ vg_lite_quality_t quality: 参考vg_lite_init_path。
+
+ uint32_t path_length: 参考vg_lite_init_path。
+
+ void \*path_data: 参考vg_lite_init_path。
+
+ vg_lite_float_t min_x, vg_lite_float_t min_y, vg_lite_float_t max_x, vg_lite_float_t max_y: 参考vg_lite_init_path。
+
+##### 3.5.3.5 vg_lite_upload_path
+
+- 描述
+
+ 该函数用于上传路径到GPU内存。
+
+ 在正常情况下,GPU驱动程序会在运行期间将任何路径数据复制到一个命令缓冲区结构中。如果有很多路径需要渲染,这确实需要一些时间。另外,在嵌入式系统中,路径数据通常不会发生变化,所以将路径数据以GPU可以直接访问的形式上传到GPU内存是有意义的。这个函数将提示驱动程序分配一个缓冲区,该缓冲区将包含路径数据和所需的命令缓冲区的头和脚的数据,以便GPU直接访问这些数据。在路径使用完毕后,调用vg_lite_clear_path来释放这个缓冲区。
+
+- 参数
+
+ vg_lite_path_t \*path: 指向vg_lite_path_t结构体的指针,该结构体包含要上传的路径。
+
+##### 3.5.3.6 vg_lite_clear_path
+
+- 描述
+
+ 这个函数将清除和重置路径成员值。如果路径已经被上传,它将释放上传路径时分配的GPU内存。
+
+- 参数
+
+ vg_lite_path_t \*path: 指向要清除的vg_lite_path_t路径定义的指针。
+
+#### 3.5.4 矢量路径操作码
+
+以下操作码是可用于矢量路径数据的路径绘制命令。
+
+一个路径操作是以\[操作码\|坐标\]的形式提交给GPU的。操作代码以VG_LITE_S8的形式存储,而坐标则通过vg_lite_format_t指定。
+
+| 操作码 | 参数 | 描述 |
+|--------|------------------------------------|------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------|
+| 0x00 | None | END. 完成,闭合所有开放的路径。 |
+| 0x02 | (x,y) | MOVE. 移动到给定的顶点。闭合所有开放的路径。 𝑠𝑡𝑎𝑟𝑡𝑥=𝑥 𝑠𝑡𝑎𝑟𝑡𝑦=𝑦 |
+| 0x03 | (Δx,Δy) | MOVE_REL. 移动到给定的相对点。闭合所有开放的路径。 𝑠𝑡𝑎𝑟𝑡𝑥=𝑠𝑡𝑎𝑟𝑡𝑥+Δ𝑥 𝑠𝑡𝑎𝑟𝑡𝑦=𝑠𝑡𝑎𝑟𝑡𝑦+Δ𝑦 |
+| 0x04 | (x,y) | LINE. 画一条直线到给定的顶点。 𝐿𝑖𝑛𝑒(𝑠𝑡𝑎𝑟𝑡𝑥,𝑠𝑡𝑎𝑟𝑡𝑦,𝑥,𝑦) 𝑠𝑡𝑎𝑟𝑡𝑥=𝑥 𝑠𝑡𝑎𝑟𝑡𝑦=𝑦 |
+| 0x05 | (Δx,Δy) | LINE_REL. 画一条直线到相对位置的顶点。 𝑥=𝑠𝑡𝑎𝑟𝑡𝑥+Δ𝑥 𝑦=𝑠𝑡𝑎𝑟𝑡𝑦+Δ𝑦 𝐿𝑖𝑛𝑒(𝑠𝑡𝑎𝑟𝑡𝑥,𝑠𝑡𝑎𝑟𝑡𝑦,𝑥,𝑦) 𝑠𝑡𝑎𝑟𝑡𝑥=𝑥 𝑠𝑡𝑎𝑟𝑡𝑦=𝑦 |
+| 0x06 | (cx,cy) (x,y) | QUAD. 使用指定的控制点绘制一条通往给定端点的二次曲线。 𝑄𝑢𝑎𝑑(𝑠𝑡𝑎𝑟𝑡𝑥,𝑠𝑡𝑎𝑟𝑡𝑦,𝑐𝑥,𝑐𝑦,𝑥,𝑦) 𝑠𝑡𝑎𝑟𝑡𝑥=𝑥 𝑠𝑡𝑎𝑟𝑡𝑦=𝑦 |
+| 0x07 | (Δcx,Δcy) (Δx,Δy) | QUAD_REL. 使用指定的相对控制点绘制一条通往给定的相对位置端点的二次曲线。 𝑐𝑥= 𝑠𝑡𝑎𝑟𝑡𝑥+Δ𝑐𝑥 𝑐𝑦=𝑠𝑡𝑎𝑟𝑡𝑦+Δ𝑐𝑦 𝑥= 𝑠𝑡𝑎𝑟𝑡𝑥+Δ𝑥 𝑦=𝑠𝑡𝑎𝑟𝑡𝑦+Δ𝑦 𝑄𝑢𝑎𝑑(𝑠𝑡𝑎𝑟𝑡𝑥,𝑠𝑡𝑎𝑟𝑡𝑦,𝑐𝑥,𝑐𝑦,𝑥,𝑦) 𝑠𝑡𝑎𝑟𝑡𝑥=𝑥 𝑠𝑡𝑎𝑟𝑡𝑦=𝑦 |
+| 0x08 | (cx1,cy1) (cx2,cy2) (x,y) | CUBIC. 使用指定的控制点绘制一条到给定端点的三次曲线。 𝐶𝑢𝑏𝑖𝑐(𝑠𝑡𝑎𝑟𝑡𝑥,𝑠𝑡𝑎𝑟𝑡𝑦,𝑐𝑥1,𝑐𝑦1,𝑐𝑥2,𝑐𝑦2,𝑥,𝑦) 𝑠𝑡𝑎𝑟𝑡𝑥=𝑥 𝑠𝑡𝑎𝑟𝑡𝑦=𝑦 |
+| 0x09 | (Δcx1,Δcy1) (Δcx2,Δcy2) (Δx,Δy) | CUBIC_REL. 使用指定的控制点绘制一条到给定相对位置端点的三次曲线。 𝑐𝑥1= 𝑠𝑡𝑎𝑟𝑡𝑥+Δ𝑐𝑥1 𝑐𝑦1=𝑠𝑡𝑎𝑟𝑡𝑦+Δ𝑐𝑦1 𝑐𝑥2=𝑠𝑡𝑎𝑟𝑡𝑥+Δ𝑐𝑥2 𝑐𝑦2=𝑠𝑡𝑎𝑟𝑡𝑦+Δ𝑐𝑦2 𝑥=𝑠𝑡𝑎𝑟𝑡𝑥+Δ𝑥 𝑦=𝑠𝑡𝑎𝑟𝑡𝑦+Δ𝑦 𝐶𝑢𝑏𝑖𝑐(𝑠𝑡𝑎𝑟𝑡𝑥,𝑠𝑡𝑎𝑟𝑡𝑦,𝑐𝑥1,𝑐𝑦1,𝑐𝑥2,𝑐𝑦2,𝑥,𝑦) 𝑠𝑡𝑎𝑟𝑡𝑥=𝑥 𝑠𝑡𝑎𝑟𝑡𝑦=𝑦 |
+| 0x0A | (rh,rv,rot,x,y) | SCCWARC. 使用指定的半径和旋转角度绘制一个小的CCW弧线到给定的端点。 𝑺𝑪𝑪𝑾𝑨𝑹𝑪(𝒓𝒉,𝒓𝒗,𝒓𝒐𝒕,𝒙,𝒚) 𝒔𝒕𝒂𝒓𝒕𝒙=𝒙 𝒔𝒕𝒂𝒓𝒕𝒚=𝒚 |
+| 0x0B | (rh,rv,rot,x,y) | SCCWARC_REL. 使用指定的半径和旋转角度向给定的相对端点绘制一个小的CCW弧线。 𝑥=𝑠𝑡𝑎𝑟𝑡𝑥+Δ𝑥 𝑦=𝑠𝑡𝑎𝑟𝑡𝑦+Δ𝑦 𝑆𝐶𝐶𝑊𝐴𝑅𝐶(𝑟ℎ,𝑟𝑣,𝑟𝑜𝑡,𝑥,𝑦) 𝑠𝑡𝑎𝑟𝑡𝑥=𝑥 𝑠𝑡𝑎𝑟𝑡𝑦=𝑦 |
+| 0x0C | (rh,rv,rot,x,y) | SCWARC. 使用指定的半径和旋转角度绘制一个小的CW弧线到给定的端点。 𝑆𝐶𝑊𝐴𝑅𝐶(𝑟ℎ,𝑟𝑣,𝑟𝑜𝑡,𝑥,𝑦) 𝑠𝑡𝑎𝑟𝑡𝑥=𝑥 𝑠𝑡𝑎𝑟𝑡𝑦=𝑦 |
+| 0x0D | (rh,rv,rot,x,y) | SCWARC_REL. 使用指定的半径和旋转角度绘制一个小的CW弧线到给定的相对端点。 𝑥=𝑠𝑡𝑎𝑟𝑡𝑥+Δ𝑥 𝑦=𝑠𝑡𝑎𝑟𝑡𝑦+Δ𝑦 𝑆𝐶𝑊𝐴𝑅𝐶(𝑟ℎ,𝑟𝑣,𝑟𝑜𝑡,𝑥,𝑦) 𝑠𝑡𝑎𝑟𝑡𝑥=𝑥 𝑠𝑡𝑎𝑟𝑡𝑦=𝑦 |
+| 0x0E | (rh,rv,rot,x,y) | LCCWARC. 使用指定的半径和旋转角度向给定的端点绘制一个大的CCW弧线。 𝐿𝐶𝐶𝑊𝐴𝑅𝐶(𝑟ℎ,𝑟𝑣,𝑟𝑜𝑡,𝑥,𝑦) 𝑠𝑡𝑎𝑟𝑡𝑥=𝑥 𝑠𝑡𝑎𝑟𝑡𝑦=𝑦 |
+| 0x0F | (rh,rv,rot,x,y) | LCCWARC_REL. 使用指定的半径和旋转角度向给定的相对端点绘制一个大的CCW弧线。 𝑥=𝑠𝑡𝑎𝑟𝑡𝑥+Δ𝑥 𝑦=𝑠𝑡𝑎𝑟𝑡𝑦+Δ𝑦 𝐿𝐶𝐶𝑊𝐴𝑅𝐶(𝑟ℎ,𝑟𝑣,𝑟𝑜𝑡,𝑥,𝑦) 𝑠𝑡𝑎𝑟𝑡𝑥=𝑥 𝑠𝑡𝑎𝑟𝑡𝑦=𝑦 |
+| 0x10 | (rh,rv,rot,x,y) | LCWARC. 使用指定的半径和旋转角度绘制一个大的CW弧线到给定的端点。 𝐿𝐶𝑊𝐴𝑅𝐶(𝑟ℎ,𝑟𝑣,𝑟𝑜𝑡,𝑥,𝑦) 𝑠𝑡𝑎𝑟𝑡𝑥=𝑥 𝑠𝑡𝑎𝑟𝑡𝑦=𝑦 |
+| 0x11 | (rh,rv,rot,x,y) | LCWARC_REL. 使用指定的半径和旋转角度绘制一个大的CW弧线到给定的相对端点。 𝑥=𝑠𝑡𝑎𝑟𝑡𝑥+Δ𝑥 𝑦=𝑠𝑡𝑎𝑟𝑡𝑦+Δ𝑦 𝐿𝐶𝑊𝐴𝑅𝐶(𝑟ℎ,𝑟𝑣,𝑟𝑜𝑡,𝑥,𝑦) 𝑠𝑡𝑎𝑟𝑡𝑥=𝑥 𝑠𝑡𝑎𝑟𝑡𝑦=𝑦 |
+
+### 3.6 基于矢量的绘制操作
+
+#### 3.6.1 枚举类型
+
+##### 3.6.1.1 vg_lite_fill_t
+
+这个枚举用于指定要使用的填充规则。对于绘制任何路径,硬件都支持非零和奇偶的填充规则。
+
+为了确定任何一个点是否包含在一个物体内,想象一下从该点向任何方向画一条线到无限远,使该线不与路径的任何顶点交叉。对于被线穿过的每条边,如果边是从左到右穿过的,则在计数器上加1,就像观察者从线上走向无限远处看到的那样;如果边是从右到左穿过的,则减去1。这样一来,平面的每个区域都会得到一个整数值。
+
+非零填充规则说,如果所得之和不等于零,那么一个点就在形状内。偶数/奇数规则说,如果结果的总和是奇数,那么一个点就在形状里面,而不考虑符号。
+
+| vg_lite_fill_t | 描述 |
+|-----------------------|------------------------------------------------------------------|
+| VG_LITE_FILL_NON_ZERO | 非零填充规则。如果一个像素至少与一个路径像素相交,就会被画出来。 |
+| VG_LITE_FILL_EVEN_ODD | 偶数填充规则。如果一个像素与奇数的路径像素相交,就会被画出来。 |
+
+##### 3.6.1.2 vg_lite_pattern_mode_t
+
+定义图像图案外的区域如何被填充到路径上。
+
+| vg_lite_pattern_mode_t | 描述 |
+|-------------------------|------------------------------------------|
+| VG_LITE_PATTERN_COLOR | 按颜色填充图案的外部。 |
+| VG_LITE_PATTERN_PAD | 图案边框的颜色被扩大以填充图案外的区域。 |
+
+#### 3.6.2 结构体
+
+##### v3.6.2.1 g_lite_color_ramp_t
+
+这个结构体定义了径向梯度的止点。五个参数提供了停止点的偏移量和颜色。每个停止点都是由一组浮点值定义的,这些浮点值指定了偏移量以及sRGBA颜色和alpha值。颜色通道的值是以非重乘(R、G、B、alpha)四边形的形式存在。所有的参数都在\[0,1\]的范围内。红、绿、蓝、α值\[0,1\]被映射到8位像素值\[0,255\]。
+
+定义径向梯度停止的最大数量是MAX_COLOR_RAMP_STOPS,即256。
+
+| 字段 | 类型 | 描述 |
+|--------|------------------|-------------------------|
+| stop | vg_lite_float_t | 颜色停止点的偏移量 |
+| red | vg_lite_float_t | 红色停止点的偏移量 |
+| green | vg_lite_float_t | 绿色停止点的偏移量 |
+| blue | vg_lite_float_t | 蓝色停止点的偏移量 |
+| alpha | vg_lite_float_t | Alpha通道停止点的偏移量 |
+
+##### 3.6.2.2 vg_lite_linear_gradient_t
+
+该结构定义了VGLite数据中的线性梯度的组织。线性渐变被应用于填充路径。它将根据设置生成一个256x1的图像。
+
+| 字段 | 类型 | 描述 |
+|-----------------------|-------------------|--------------------------------|
+| colors\[VLC_MAX_GRAD\] | uint32_t | 渐变的颜色数组 |
+| count | uint32_t | 颜色数量 |
+| stops\[VLC_MAX_GRAD\] | uint32_t | 色阶数,从0到255 |
+| matrix | vg_lite_matrix_t | 转换梯度颜色斜率的矩阵结构体 |
+| image | vg_lite_buffer_t | 表示颜色斜率的图像对象结构体。 |
+
+其中VLC_MAX_GRAD最大为16,VLC_GRADBUFFER_WIDTH最大为256.
+
+#### 3.6.3 函数
+
+##### 3.6.3.1 vg_lite_draw
+
+- 描述
+
+ 执行硬件加速的2D矢量绘制操作。
+
+ 嵌片缓冲区的大小可以在初始化时指定,该大小将被内核调整为硬件所需的最小对齐方式。如果你把嵌片缓冲区做得更小,分配的内存就会更少,但是一个路径可能会被多次下发到硬件,因为硬件会用提供的嵌片窗口大小来行走目标,所以性能可能会降低。良好的做法是将嵌片缓冲区的大小设置为最常见的路径大小。例如,如果你所做的只是渲染最高24pt的字体,你可以将嵌片缓冲区设置为24x24。
+
+- 参数
+
+ vg_lite_buffer_t \*target: 指向目标缓冲区的vg_lite_buffer_t结构体的指针。所有在vg_lite_buffer_format_t枚举中的颜色格式都是绘图函数的有效目标格式。
+
+ vg_lite_path_t \*path: 指向vg_lite_path_t结构体的指针,该结构体包含描述要绘制的路径数据。关于操作码的详细内容,请参考本文件中关于[矢量路径操作码](#354-矢量路径操作码)的部分。
+
+ vg_lite_fill_t fill_rule: 为路径的填充规则指定vg_lite_fill_t的枚举值。
+
+ vg_lite_matrix_t \*matrix: 指向vg_lite_matrix_t结构体的指针,该结构体定义了路径的仿射变换矩阵。如果矩阵为NULL,则假定是一个单位矩阵。注意:vg_lite_draw不支持非仿射变换,所以透视变换矩阵对路径没有影响。
+
+ vg_lite_blend_t blend: 在vg_lite_blend_t枚举中选择一种硬件支持的混合模式,应用于每个绘制的像素。如果不需要混合,请将此值设置为VG_LITE_BLEND_NONE,即0。
+
+ vg_lite_color_t color: 应用于路径绘制的每个像素的颜色。
+
+##### 3.6.3.2 vg_lite_draw_gradient
+
+- 描述
+
+ 该函数用于根据指定的填充规则用渐变色填充路径。指定的路径将根据选定的矩阵进行转换,并渐变填充。
+
+- 参数
+
+ vg_lite_buffer_t \*target: 参照vg_lite_draw.
+
+ vg_lite_path_t \*path: 参照vg_lite_draw.
+
+ vg_lite_fill_t fill_rule: 参照vg_lite_draw.
+
+ vg_lite_matrix_t \*matrix: 参照vg_lite_draw.
+
+ vg_lite_linear_gradient_t \*grad: 指向vg_lite_linear_gradient_t结构体的指针,该结构体包含用于填充路径的值。
+
+ vg_lite_blend_t blend: 参照vg_lite_draw.
+
+##### 3.6.3.3 vg_lite_draw_pattern
+
+- 描述
+
+ 这个函数用图像图案填充一个路径。路径将根据指定的矩阵进行转换,并以转换后的图像图案填充。
+
+- 参数
+
+ vg_lite_buffer_t \*target: 参照vg_lite_draw.
+
+ vg_lite_path_t \*path: 参照vg_lite_draw.
+
+ vg_lite_fill_t fill_rule: 参照vg_lite_draw.
+
+ vg_lite_matrix_t \*matrix0: 指向vg_lite_matrix_t结构体的指针,它定义了路径的3x3变换矩阵。如果矩阵为NULL,就会假定是一个单位矩阵。
+
+ vg_lite_buffer_t \*source: 指向描述图像模式来源的vg_lite_buffer_t结构体的指针。
+
+ vg_lite_matrix_t \*matrix1: 指向一个vg_lite_matrix_t结构体的指针,该矩阵定义了源像素到目标像素的3x3变换。如果矩阵为NULL,则假定是一个单位矩阵,这意味着源像素将被直接复制到目标像素的0,0位置。
+
+ vg_lite_blend_t blend: 参照vg_lite_draw.
+
+ vg_lite_pattern_mode_t pattern mode: 指定vg_lite_pattern_mode_t值,它定义了如何填充图像图案外的区域。
+
+ vg_lite_color_t pattern_color: 指定一个32bpp的ARGB颜色(vg_lite_color_t),当pattern_mode值为VG_LITE_PATTERN_COLOR时,应用于图像图案区域外的填充。
+
+ vg_lite_filter_t filter: 指定过滤器的类型。vg_lite_filter_t枚举中的所有格式都是这个函数的有效格式。值为零(0)表示VG_LITE_FILTER_POINT。
+
+#### 3.6.4 线性渐变初始化和控制函数
+
+##### 3.6.4.1 vg_lite_init_grad
+
+- 描述
+
+ 此函数以默认设置初始化线性梯度对象的内部缓冲区,用于渲染。
+
+- 参数
+
+ vg_lite_linear_gradient_t \*grad: 指向vg_lite_linear_gradient_t结构体的指针,该结构定义了要被初始化的渐变。使用默认值。
+
+##### 3.6.4.2 vg_lite_set_grad
+
+- 描述
+
+ 该函数用于设置vg_lite_linear_gradient_t结构成员的值。
+
+ 注意:在输入参数不完整或无效的情况下,采用以下规则设置默认梯度颜色。
+
+ 1. 如果没有指定有效的止点(例如,由于空的输入数组、超出范围或超出顺序的止点),则隐含地定义一个具有(R, G, B, α)颜色(0.0, 0\.0, 0\.0, 1\.0)(不透明的黑色)的0停止点和一个具有颜色(1\.0, 1\.0, 1\.0)(不透明的白色)的1止点。
+ 1. 如果至少指定了一个有效的停止点,但没有定义偏移量为0的停止点,那么将添加一个隐含的停止点,偏移量为0,颜色与第一个用户定义的停止点相同。
+ 1. 如果至少指定了一个有效的停止,但没有定义偏移量为1的停止,则添加一个隐式停止,其偏移量为1,颜色与最后一个用户定义的停止相同。
+
+- 参数
+
+ vg_lite_linear_gradient_t \*grad: 指向要设置的vg_lite_linear_gradient_t结构体的指针。
+
+ uint32_t count: 线性渐变中颜色的计数。最大的色块计数是由VLC_MAX_GRAD定义的,即16。
+
+ uint32_t \*colors: 指定渐变的颜色数组,ARGB8888格式,Alpha在最高位。
+
+ uint32_t \*stops: 指向渐变停止的偏移量的指针。
+
+##### 3.6.4.3 vg_lite_update_grad
+
+- 描述
+
+ 这个函数用于更新或生成一个将要被渲染的图像对象的值。vg_lite_linear_gradient_t对象有一个图像缓冲区,用于渲染渐变图案。该图像缓冲区将被创建或更新为相应的渐变参数。
+
+- 参数
+
+ vg_lite_linear_gradient_t \*grad: 指向vg_lite_linear_gradient_t结构体的指针,该结构体包含要用于渲染对象的更新值。
+
+##### 3.6.4.4 vg_lite_get_grad_matrix
+
+- 描述
+
+ 这个函数用来获取渐变对象的变换矩阵的指针,这允许应用程序操作矩阵以促进渐变色路径的正确渲染。
+
+- 参数
+
+ vg_lite_linear_gradient_t \*grad: 指向vg_lite_linear_gradient_t结构体的指针,该结构体包含要检索的矩阵。
+
+##### 3.6.4.5 vg_lite_clear_grad
+
+- 描述
+
+ 该函数用于清除线性渐变对象的值,释放图像缓冲区的内存。
+
+- 参数
+
+ vg_lite_linear_gradient_t \*grad: 指向要清除的vg_lite_linear_gradient_t结构的指针。
+
+## 4. 约束条件
+
+GPU驱动程序**只支持一个当前上下文和一个线程来向GPU发布命令**。GPU驱动程序**不支持**在多个线程/进程中同时运行的多个并发上下文,因为GPU内核驱动程序不支持上下文切换。GPU应用程序在任何时候都只能使用一个上下文来向GPU硬件发出命令。如果GPU应用程序需要切换上下文,应该调用[vg_lite_close](#3213-vg_lite_close)来关闭当前线程中的当前上下文,然后可以调用[vg_lite_init](#3212-vg_lite_init)来初始化当前线程中或其他线程/进程中的新上下文。
+
+## 5. 性能建议与最佳实践
+
+### 5.1 Cache vs Non-cache
+
+在加载vg_lite.ko模块时,通过cached参数可以配置是否关闭cache(默认启用cache),cache模式下在提交命令给GPU硬件之前会驱动会刷新CPU缓存(D-cache和L2-cache),而non-cache模式下会将command buffer及显存映射到用户态地址空间时设置为non-cache。一般情况下cache模式具有更好的性能,CPU写入command buffer以及读取显存都更快。
+
+目前刷新cache使用dcache.cipa指令,这个指令一次只能刷一个缓存行即64Bytes,对于较大的缓冲区例如1920x1080@ARGB32,大约需要循环129600次,其中大部分是未命中的,会带来一定的性能开销,而如果使用dcache.ciall指令可以刷新所有cache,但是可能会影响其他进程所以没有使用。
+
+### 5.2 内存使用
+
+vg_lite.ko模块加载后会占用大约130KB内存,除command buffer及显存外几乎不会占用更多空间,每个由vg_lite_hal_allocate_contiguous分配的内存除内存本身外还需要相应的页表资源以及一个大小为64B的节点。
+
+### 5.3 绘制流程
+
+使用VGLite API进行操作
+
+1. 调用[vg_lite_init](#3212-vg_lite_init)初始化GPU
+1. 如果需要使用GPU显存,调用[vg_lite_allocate](#3251-vg_lite_allocate)分配和映射
+1. 使用API绘制
+1. 调用[vg_lite_finish](#3214-vg_lite_finish)或[vg_lite_flush](#3215-vg_lite_flush)提交命令进行渲染,等待绘制结束
+1. 进程结束前,调用[vg_lite_close](#3213-vg_lite_close)关闭GPU
diff --git "a/zh/01_software/board/mpp/K230_SHA256_API\345\217\202\350\200\203.md" "b/zh/01_software/board/mpp/K230_SHA256_API\345\217\202\350\200\203.md"
new file mode 100755
index 0000000..aeabfbf
--- /dev/null
+++ "b/zh/01_software/board/mpp/K230_SHA256_API\345\217\202\350\200\203.md"
@@ -0,0 +1,149 @@
+# K230 SHA256 API参考
+
+
+
+版权所有©2023北京嘉楠捷思信息技术有限公司
+
+
+
+## 免责声明
+
+您购买的产品、服务或特性等应受北京嘉楠捷思信息技术有限公司(“本公司”,下同)及其关联公司的商业合同和条款的约束,本文档中描述的全部或部分产品、服务或特性可能不在您的购买或使用范围之内。除非合同另有约定,本公司不对本文档的任何陈述、信息、内容的正确性、可靠性、完整性、适销性、符合特定目的和不侵权提供任何明示或默示的声明或保证。除非另有约定,本文档仅作为使用指导参考。
+
+由于产品版本升级或其他原因,本文档内容将可能在未经任何通知的情况下,不定期进行更新或修改。
+
+## 商标声明
+
+、“嘉楠”和其他嘉楠商标均为北京嘉楠捷思信息技术有限公司及其关联公司的商标。本文档可能提及的其他所有商标或注册商标,由各自的所有人拥有。
+
+**版权所有 © 2023北京嘉楠捷思信息技术有限公司。保留一切权利。**
+非经本公司书面许可,任何单位和个人不得擅自摘抄、复制本文档内容的部分或全部,并不得以任何形式传播。
+
+
+
+## 目录
+
+[TOC]
+
+## 前言
+
+### 概述
+
+本文档主要介绍 K230 SHA256 软件的使用,内容主要包括 SHA256 API 的使用及测试程序介绍。
+
+### 读者对象
+
+本文档(本指南)主要适用于以下人员:
+
+- 技术支持工程师
+- 软件开发工程师
+
+### 缩略词定义
+
+| 简称 | 说明 |
+| ---- | ---- |
+| SHA256 | Secure Hash Algorithm |
+
+### 修订记录
+
+| 文档版本号 | 修改说明 | 修改者 | 日期 |
+| ---------- | -------- | ---------- | ---------- |
+| V1.0 | 初版 | 杨帆 | 2023-05-30 |
+
+## 1. 功能介绍
+
+SHA256 主要用于计算数据的 hash 值,大核 rt-smart 中实现了 SHA256 算法,用于计算数据的 hash 值,代码逻辑如下图所示:
+
+
+
+## 2. API 参考
+
+SHA256模块主要提供了以下 API:
+
+- [kd_mpi_cipher_sha256](#21-kd_mpi_cipher_sha256)
+
+### 2.1 kd_mpi_cipher_sha256
+
+【描述】
+
+根据传入的消息计算消息的 hash 值。
+
+【语法】
+
+kd_mpi_cipher_sha256(const void \*data, k_u32 len, k_u8 \*hash);
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|-----------------|-------------------------------|-----------|
+| data | 传入的消息 | 输入 |
+| len | 传入消息的长度 | 输入 |
+| hash | 计算得到的 hash 值 | 输出 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|---------|---------------------------------|
+| 0 | 成功。 |
+| 非 0 | 失败,参考错误码定义 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_cipher_api.h
+- 库文件:libcipher.a
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+## 3. 调试及打印信息
+
+写一个用户态应用程序 *sample_cipher.c* 来测试 SHA256 功能。
+
+测试代码已经写好,位于 *mpp/userapps/sample/sample_cipher* 目录下,具体的调试方法如下:
+
+1. 大核启动之后,进入 *bin* 目录;
+1. 运行 *sample_cipher.elf* 程序;
+1. 打印信息。
+
+具体的打印信息如下所示:
+
+```shell
+msh />cd bin/
+msh /bin>./sample_cipher.elf
+input = ''
+digest: e3b0c442 98fc1c14 9afbf4c8 996fb924 27ae41e4 649b934c a495991b 7852b855
+result: PASS
+
+input = 'abc'
+digest: ba7816bf 8f01cfea 414140de 5dae2223 b00361a3 96177a9c b410ff61 f20015ad
+result: PASS
+
+input = 'abcdbcdecdefdefgefghfghighijhijkijkljklmklmnlmnomnopnopq'
+digest: 248d6a61 d20638b8 e5c02693 0c3e6039 a33ce459 64ff2167 f6ecedd4 19db06c1
+result: PASS
+
+input = 'The quick brown fox jumps over the lazy dog'
+digest: d7a8fbb3 07d78094 69ca9abc b0082e4f 8d5651e4 6d3cdb76 2d02d0bf 37c9e592
+result: PASS
+
+input = 'The quick brown fox jumps over the lazy cog'
+digest: e4c4d8f3 bf76b692 de791a17 3e053211 50f7a345 b46484fe 427f6acc 7ecc81be
+result: PASS
+
+input = 'bhn5bjmoniertqea40wro2upyflkydsibsk8ylkmgbvwi420t44cq034eou1szc1k0mk46oeb7ktzmlxqkbte2sy'
+digest: 9085df2f 02e0cc45 5928d0f5 1b27b4bf 1d9cd260 a66ed1fd a11b0a3f f5756d99
+result: PASS
+```
diff --git "a/zh/01_software/board/mpp/K230_VICAP_API\345\217\202\350\200\203.md" "b/zh/01_software/board/mpp/K230_VICAP_API\345\217\202\350\200\203.md"
new file mode 100644
index 0000000..e3ac538
--- /dev/null
+++ "b/zh/01_software/board/mpp/K230_VICAP_API\345\217\202\350\200\203.md"
@@ -0,0 +1,2072 @@
+# K230 VICAP API参考
+
+
+
+版权所有©2023北京嘉楠捷思信息技术有限公司
+
+
+
+## 免责声明
+
+您购买的产品、服务或特性等应受北京嘉楠捷思信息技术有限公司(“本公司”,下同)及其关联公司的商业合同和条款的约束,本文档中描述的全部或部分产品、服务或特性可能不在您的购买或使用范围之内。除非合同另有约定,本公司不对本文档的任何陈述、信息、内容的正确性、可靠性、完整性、适销性、符合特定目的和不侵权提供任何明示或默示的声明或保证。除非另有约定,本文档仅作为使用指导参考。
+
+由于产品版本升级或其他原因,本文档内容将可能在未经任何通知的情况下,不定期进行更新或修改。
+
+## 商标声明
+
+、“嘉楠”和其他嘉楠商标均为北京嘉楠捷思信息技术有限公司及其关联公司的商标。本文档可能提及的其他所有商标或注册商标,由各自的所有人拥有。
+
+**版权所有 © 2023北京嘉楠捷思信息技术有限公司。保留一切权利。**
+非经本公司书面许可,任何单位和个人不得擅自摘抄、复制本文档内容的部分或全部,并不得以任何形式传播。
+
+
+
+## 目录
+
+[TOC]
+
+## 前言
+
+### 概述
+
+本文档主要指导应用开发者通过如何通过VICAP模块获取图像数据,描述了各个模块API的基本功能。
+
+### 读者对象
+
+本文档(本指南)主要适用于以下人员:
+
+- 技术支持工程师
+- 软件开发工程师
+
+### 缩略词定义
+
+| 简称 | 说明 |
+|------|------|
+| | |
+
+### 修订记录
+
+| 文档版本号 | 修改说明 | 修改者 | 日期 |
+|------------|--------------------------------------------------------------------------------------------------------------------------------------------|---------------|-----------|
+| V1.0 | 初版 | 汪成根 | 2023/4/4 |
+| V1.1 | 修改VICAP概述 2、添加API、数据类型的跳转 | 赵忠祥 | 2023/4/6 |
+| V1.2 | 移除ISP相关接口 增加API及数据类型描述 将sensor接口从libvicap库分离出来独立为libsensor库 增加ov9286红外/散斑类型 更新VICAP描述 更新文档格式 | 郭世栋 汪成根 | 2023/4/26 |
+
+## 1. 概述
+
+### 1.1 概述
+
+VICAP子系统是K230 SOC中负责视频图像输入捕获处理的子系统。通过对sensor输出的信号进行实时处理,得到经过复原、增强后的数字图像,使其更接近现实中人眼所见的图像。主要包括MIPI RxDphy、MIPI CSI、ISP和DW。MIPI用于接收sensor传来的高速差分信号,并将其转为DVP接口,供ISP处理;ISP用于图像信息的处理;DW用于鱼眼矫正和多路resize输出。
+
+本文档主要描述VICAP模块应用编程接口,它提供了应用开发者通过VICAP模块捕获视频图像数据的操作接口和配置参数。
+
+### 1.2 功能描述
+
+#### 1.2.1 VICAP
+
+VICAP模块是对整个图像采集处理单元的抽象描述。
+
+VICAP硬件由Sensor,VI,ISP,Dewarp四大模块组成(如下图1-1所示)。最多支持3路sensor同时接入,ISP内部通过的MCM模块实现多路sensor的时分复用管理,多路sensor输出数据通过MCM的Memory Interface的Write接口写入DDR,再通过Read接口读入并装载到ISP Pipeline进行处理。
+
+、
+
+图1-1 VICAP硬件架构图
+
+VICAP软件架构如图1-2所示,从上到下依次是:应用接口层,媒体接口层,系统框架层,驱动层和硬件层。
+
+- 应用层接口: 提供kd_mapi_vicap_xxx形式的API接口及使用说明。它是对媒体接口层各个子模块提供的功能接口的进一步封装,简化应用开发流程。
+- 媒体接口层:该层由VICAP各个子模块组成,每个子模块提供各自的媒体接口API封装。
+- 框架层:负责VICAP整个系统软件功能与业务逻辑的控制与管理。通过将各个子模块提供的接口与功能整合统一形成一套完整的VICAP系统控制逻辑和流程。
+- 驱动层:VICAP各个硬件模块的内核驱动功能的集合。
+
+硬件层:VICAP各个具体硬件模块的集合,包括sensor。
+
+
+
+#### 1.2.2 Sensor
+
+Sensor模块是VICAP捕获图像的数据源之一,负责配置图像感光单元的运行参数及工作模式。
+
+K230平台支持多种接口类型的sensor,我们以当前最常用的MIPI CSI接口Sensor为例进行说明。Sensor与主控平台的硬件连接示意图如下:
+
+
+
+图1-3
+
+主控通过I2C接口下发配置寄存器控制sensor的工作方式,sensor通过MIPI CSI接口将图像数据发送至主控SOC。
+
+Sensor模块系统架构如下图1-4所示:
+
+
+
+图1-4 sensor系统架构图
+
+从上到下依次是:媒体接口层,硬件驱动层以及硬件层
+
+- 媒体接口层:提供kd_mpi_sensor_xxx接口给外部模块操作和访问sensor设备。
+- 驱动层:该层主要包两部分,分别是:sensor_dev,sensor_drv。
+- sensor_dev:负责设备驱动文件的注册,提供文件操作接口的实现流程。通过注册设备文件节点/dev/sensorxx供用户空间的程序访问内核驱动。
+- sensor_drv:具体sensor的硬件驱动,并将针对sensor的操作封装为统一的接口。
+- 硬件层:sensor模组硬件,当前系统中最多同时支持三路硬件sensor。
+
+## 2. API 参考
+
+### 2.1 VICAP
+
+该功能模块提供以下API:
+
+- [kd_mpi_vicap_get_sensor_info](#211-kd_mpi_vicap_get_sensor_info)
+- [kd_mpi_vicap_set_dev_attr](#212-kd_mpi_vicap_set_dev_attr)
+- [kd_mpi_vicap_get_dev_attr](#213-kd_mpi_vicap_get_dev_attr)
+- [kd_mpi_vicap_set_chn_attr](#214-kd_mpi_vicap_set_chn_attr)
+- [kd_mpi_vicap_get_chn_attr](#215-kd_mpi_vicap_get_chn_attr)
+- [kd_mpi_vicap_init](#216-kd_mpi_vicap_init)
+- [kd_mpi_vicap_deinit](#217-kd_mpi_vicap_deinit)
+- [kd_mpi_vicap_start_stream](#218-kd_mpi_vicap_start_stream)
+- [kd_mpi_vicap_stop_stream](#219-kd_mpi_vicap_stop_stream)
+- [kd_mpi_vicap_dump_frame](#2110-kd_mpi_vicap_dump_frame)
+- [kd_mpi_vicap_dump_release](#2111-kd_mpi_vicap_dump_release)
+
+#### 2.1.1 kd_mpi_vicap_get_sensor_info
+
+【描述】
+
+根据指定的sensor配置类型获取sensor配置信息
+
+【语法】
+
+k_s32 kd_mpi_vicap_get_sensor_info(k_vicap_sensor_type sensor_type, k_vicap_sensor_info \*sensor_info)
+
+【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+|--------------|----------------|---------------|
+| sensor_type | Sensor配置类型 | 输入 |
+| sensor_info | Sensor配置信息 | 输出 |
+
+【返回值】
+
+| **返回值** | **描述** |
+|------------|------------------------|
+| 0 | 成功。 |
+| 非0 | 失败,参考错误码定义。 |
+
+【芯片差异】
+
+无。
+
+【需求】
+
+- 头文件:mpi_vicap_api.h
+- 库文件:libvicap.a
+
+【注意】
+
+应用开发者根据需要要使用的sensor配置类型,需要首先调用该API获取sensor配置信息,并根据配置信息调用后续接口对VICAP其他模块进行初始化。
+
+【举例】
+
+无。
+
+【相关主题】
+
+#### 2.1.2 kd_mpi_vicap_set_dev_attr
+
+【描述】
+
+设置VICAP设备属性
+
+【语法】
+
+k_s32 kd_mpi_vicap_set_dev_attr(k_vicap_dev dev_num, k_vicap_dev_attr dev_attr)
+
+【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+|--------------|---------------|---------------|
+| dev_num | VICAP设备号 | 输入 |
+| dev_attr | VICAP设备属性 | 输入 |
+
+【返回值】
+
+| **返回值** | **描述** |
+|------------|------------------------|
+| 0 | 成功。 |
+| 非0 | 失败,参考错误码定义。 |
+
+【芯片差异】
+
+无。
+
+【需求】
+
+- 头文件:mpi_vicap_api.h
+- 库文件:libvicap.a
+
+【注意】
+
+无。
+
+【举例】
+
+无。
+
+【相关主题】
+
+#### 2.1.3 kd_mpi_vicap_get_dev_attr
+
+【描述】
+
+获取VICAP设备属性
+
+【语法】
+
+k_s23 kd_mpi_vicap_set_chn_attr(k_vicap_dev dev, k_vicap_chn_attr chn_attr)
+
+【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+|--------------|---------------|---------------|
+| dev_num | VICAP设备号 | 输入 |
+| dev_attr | VICAP设备属性 | 输出 |
+
+【返回值】
+
+| **返回值** | **描述** |
+|------------|------------------------|
+| 0 | 成功。 |
+| 非0 | 失败,参考错误码定义。 |
+
+【芯片差异】
+
+无。
+
+【需求】
+
+- 头文件:mpi_vicap_api.h
+- 库文件:libvicap.a
+
+【注意】
+
+无。
+
+【举例】
+
+无。
+
+【相关主题】
+
+#### 2.1.4 kd_mpi_vicap_set_chn_attr
+
+【描述】
+
+设置VICAP设备属性
+
+【语法】
+
+k_s32 kd_mpi_vicap_set_chn_attr(k_vicap_dev dev_num, k_vicap_chn chn_num, k_vicap_chn_attr chn_attr)
+
+【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+|--------------|-------------------|---------------|
+| dev_num | VICAP设备号 | 输入 |
+| chn_num | VICAP输出通道号 | 输入 |
+| chn_attr | VICAP输出通道属性 | 输入 |
+
+【返回值】
+
+| **返回值** | **描述** |
+|------------|------------------------|
+| 0 | 成功。 |
+| 非0 | 失败,参考错误码定义。 |
+
+【芯片差异】
+
+无。
+
+【需求】
+
+- 头文件:mpi_vicap_api.h
+- 库文件:libvicap.a
+
+【注意】
+
+无。
+
+【举例】
+
+无。
+
+【相关主题】
+
+#### 2.1.5 kd_mpi_vicap_get_chn_attr
+
+【描述】
+
+获取VICAP设备属性
+
+【语法】
+
+k_s32 kd_mpi_vicap_get_chn_attr(k_vicap_dev dev_num, k_vicap_chn chn_num, k_vicap_chn_attr \*chn_attr)
+
+【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+|--------------|-------------------|---------------|
+| dev_num | VICAP设备号 | 输入 |
+| chn_num | VICAP输出通道号 | 输入 |
+| chn_attr | VICAP输出通道属性 | 输出 |
+
+【返回值】
+
+| **返回值** | **描述** |
+|------------|------------------------|
+| 0 | 成功。 |
+| 非0 | 失败,参考错误码定义。 |
+
+【芯片差异】
+
+无。
+
+【需求】
+
+- 头文件:mpi_vicap_api.h
+- 库文件:libvicap.a
+
+【注意】
+
+无。
+
+【举例】
+
+无。
+
+【相关主题】
+
+#### 2.1.6 kd_mpi_vicap_init
+
+【描述】
+
+VICAP设备初始化
+
+【语法】
+
+k_s32 kd_mpi_vicap_init(k_vicap_dev dev_num)
+
+【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+|--------------|-------------|---------------|
+| dev_num | VICAP设备号 | 输入 |
+
+【返回值】
+
+| **返回值** | **描述** |
+|------------|------------------------|
+| 0 | 成功。 |
+| 非0 | 失败,参考错误码定义。 |
+
+【芯片差异】
+
+无。
+
+【需求】
+
+- 头文件:mpi_vicap_api.h
+- 库文件:libvicap.a
+
+【注意】
+
+使用该接口之前需要先调用kd_mpi_vicap_set_dev_attr设置设备属性,再调用kd_mpi_vicap_set_chn_attr 设置输出通道属性。
+
+【举例】
+
+无
+
+【相关主题】
+
+#### 2.1.7 kd_mpi_vicap_deinit
+
+【描述】
+
+VICAP设备去初始化
+
+【语法】
+
+k_s32 kd_mpi_vicap_deinit(k_vicap_dev dev_num)
+
+【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+|--------------|-------------|---------------|
+| dev_num | VICAP设备号 | 输入 |
+
+【返回值】
+
+| **返回值** | **描述** |
+|------------|------------------------|
+| 0 | 成功。 |
+| 非0 | 失败,参考错误码定义。 |
+
+【芯片差异】
+
+无。
+
+【需求】
+
+- 头文件:mpi_vicap_api.h
+- 库文件:libvicap.a
+
+【注意】
+
+无。
+
+【举例】
+
+无。
+
+【相关主题】
+
+#### 2.1.8 kd_mpi_vicap_start_stream
+
+【描述】
+
+启动VICAP设备输出数据流
+
+【语法】
+
+k_s32 kd_mpi_vicap_start_stream(k_vicap_dev dev_num)
+
+【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+|--------------|-------------|---------------|
+| dev_num | VICAP设备号 | 输入 |
+
+【返回值】
+
+| **返回值** | **描述** |
+|------------|------------------------|
+| 0 | 成功。 |
+| 非0 | 失败,参考错误码定义。 |
+
+【芯片差异】
+
+无。
+
+【需求】
+
+- 头文件:mpi_vicap_api.h
+- 库文件:libvicap.a
+
+【注意】
+
+无。
+
+【举例】
+
+无。
+
+【相关主题】
+
+#### 2.1.9 kd_mpi_vicap_stop_stream
+
+【描述】
+
+停止VICAP设备数据流输出
+
+【语法】
+
+k_s32 kd_mpi_vicap_stop_stream(k_vicap_dev dev_num)
+
+【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+|--------------|-------------|---------------|
+| dev_num | VICAP设备号 | 输入 |
+
+【返回值】
+
+| **返回值** | **描述** |
+|------------|------------------------|
+| 0 | 成功。 |
+| 非0 | 失败,参考错误码定义。 |
+
+【芯片差异】
+
+无。
+
+【需求】
+
+- 头文件:mpi_vicap_api.h
+- 库文件:libvicap.a
+
+【注意】
+
+无
+
+【举例】
+
+无。
+
+【相关主题】
+
+#### 2.1.10 kd_mpi_vicap_dump_frame
+
+【描述】
+
+根据指定的设备和输出通道dump vicap数据
+
+【语法】
+
+k_s32 kd_mpi_vicap_dump_frame(k_vicap_dev dev_num, k_vicap_chn chn_num, k_vicap_dump_format foramt,
+
+k_video_frame_info \*vf_info, k_u32 milli_sec)
+
+【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+|--------------|-----------------|---------------|
+| dev_num | VICAP设备号 | 输入 |
+| chn_num | VICAP输出通道号 | 输入 |
+| foramt | Dump数据类型 | 输入 |
+| vf_info | Dump帧信息 | 输出 |
+| milli_sec | 超时时间 | 输入 |
+
+【返回值】
+
+| **返回值** | **描述** |
+|------------|------------------------|
+| 0 | 成功。 |
+| 非0 | 失败,参考错误码定义。 |
+
+【芯片差异】
+
+无。
+
+【需求】
+
+- 头文件:mpi_vicap_api.h
+- 库文件:libvicap.a
+
+【注意】
+
+无。
+
+【举例】
+
+无。
+
+【相关主题】
+
+#### 2.1.11 kd_mpi_vicap_dump_release
+
+【描述】
+
+释放dump数据帧
+
+【语法】
+
+k_s32 kd_mpi_vicap_dump_release(k_vicap_dev dev_num, k_vicap_chn chn_num, const k_video_frame_info \*vf_info)
+
+【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+|--------------|-----------------|---------------|
+| dev_num | VICAP设备号 | 输入 |
+| chn_num | VICAP输出通道号 | 输入 |
+| vf_info | Dump帧信息 | 输入 |
+
+【返回值】
+
+| **返回值** | **描述** |
+|------------|------------------------|
+| 0 | 成功。 |
+| 非0 | 失败,参考错误码定义。 |
+
+【芯片差异】
+
+无。
+
+【需求】
+
+- 头文件:mpi_vicap_api.h
+- 库文件:libvicap.a
+
+【注意】
+
+无。
+
+【举例】
+
+无。
+
+【相关主题】
+
+### 2.2 Sensor
+
+该功能模块提供以下API:
+
+- [kd_mpi_sensor_open](#221-kd_mpi_sensor_open)
+- [kd_mpi_sensor_close](#222-kd_mpi_sensor_close)
+- [kd_mpi_sensor_power_set](#223-kd_mpi_sensor_power_set)
+- [kd_mpi_sensor_id_get](#224-kd_mpi_sensor_id_get)
+- [kd_mpi_sensor_init](#225-kd_mpi_sensor_init)
+- [kd_mpi_sensor_reg_read](#226-kd_mpi_sensor_reg_read)
+- [kd_mpi_sensor_reg_write](#227-kd_mpi_sensor_reg_write)
+- [kd_mpi_sensor_mode_get](#228-kd_mpi_sensor_mode_get)
+- [kd_mpi_sensor_mode_set](#229-kd_mpi_sensor_mode_set)
+- [kd_mpi_sensor_stream_enable](#2210-kd_mpi_sensor_stream_enable)
+- [kd_mpi_sensor_again_set](#2211-kd_mpi_sensor_again_set)
+- [kd_mpi_sensor_again_get](#2212-kd_mpi_sensor_again_get)
+- [kd_mpi_sensor_dgain_set](#2213-kd_mpi_sensor_dgain_set)
+- [kd_mpi_sensor_dgain_get](#2214-kd_mpi_sensor_dgain_get)
+- [kd_mpi_sensor_intg_time_set](#2215-kd_mpi_sensor_intg_time_set)
+- [kd_mpi_sensor_intg_time_get](#2216-kd_mpi_sensor_intg_time_get)
+
+#### 2.2.1 kd_mpi_sensor_open
+
+【描述】
+
+根据sensor设备名称打开sensor设备
+
+【语法】
+
+k_s32 kd_mpi_sensor_open(const char \*sensor_name)
+
+【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+|--------------|----------------|---------------|
+| sensor_name | Sensor设备名称 | 输入 |
+
+【返回值】
+
+| **返回值** | **描述** |
+|------------|------------------------|
+| 正值 | 成功。返回设备描述符 |
+| 负值 | 失败,参考错误码定义。 |
+
+【芯片差异】
+
+无。
+
+【需求】
+
+- 头文件:mpi_sensor_api.h
+- 库文件:libsensor.a
+
+【注意】
+
+无。
+
+【举例】
+
+无。
+
+【相关主题】
+
+#### 2.2.2 kd_mpi_sensor_close
+
+【描述】
+
+关闭sensor设备
+
+【语法】
+
+k_s32 kd_mpi_sensor_close (k_s32 fd)
+
+【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+|--------------|----------------------|---------------|
+| fd | Sensor设备文件描述符 | 输入 |
+
+【返回值】
+
+| **返回值** | **描述** |
+|------------|------------------------|
+| 0 | 成功。 |
+| 非0 | 失败,参考错误码定义。 |
+
+【芯片差异】
+
+无。
+
+【需求】
+
+- 头文件:mpi_sensor_api.h
+- 库文件:libsensor.a
+
+【注意】
+
+无。
+
+【举例】
+
+无。
+
+【相关主题】
+
+#### 2.2.3 kd_mpi_sensor_power_set
+
+【描述】
+
+设置sensor电源状态
+
+【语法】
+
+k_s32 kd_mpi_sensor_power_set(k_s32 fd, k_bool on)
+
+【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+|--------------|-----------------------------------------------|---------------|
+| fd | Sensor设备文件描述符 | 输入 |
+| on | 设置sensor上电状态,K_TRUE:上电,K_FALSE:下电 | 输入 |
+
+【返回值】
+
+| **返回值** | **描述** |
+|------------|------------------------|
+| 0 | 成功。 |
+| 非0 | 失败,参考错误码定义。 |
+
+【芯片差异】
+
+无。
+
+【需求】
+
+- 头文件:mpi_sensor_api.h
+- 库文件:libsensor.a
+
+【注意】
+
+无。
+
+【举例】
+
+无。
+
+【相关主题】
+
+#### 2.2.4 kd_mpi_sensor_id_get
+
+【描述】
+
+获取sensor id
+
+【语法】
+
+k_s32 kd_mpi_sensor_id_get(k_s32 fd, k_u32 \*sensor_id)
+
+【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+|--------------|----------------------|---------------|
+| fd | Sensor设备文件描述符 | 输入 |
+| sensor_id | 获取的sensor id | 输出 |
+
+【返回值】
+
+| **返回值** | **描述** |
+|------------|------------------------|
+| 0 | 成功。 |
+| 非0 | 失败,参考错误码定义。 |
+
+【芯片差异】
+
+无。
+
+【需求】
+
+- 头文件:mpi_sensor_api.h
+- 库文件:libsensor.a
+
+【注意】
+
+无。
+
+【举例】
+
+无。
+
+【相关主题】
+
+#### 2.2.5 kd_mpi_sensor_init
+
+【描述】
+
+Sensor初始化
+
+【语法】
+
+k_s32 kd_mpi_sensor_init(k_s32 fd, k_sensor_mode mode)
+
+【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+|--------------|---------------------------------------------|---------------|
+| fd | Sensor设备文件描述符 | 输入 |
+| mode | 根据指定的sensor mode初始化sensor配置寄存器 | 输入 |
+
+【返回值】
+
+| **返回值** | **描述** |
+|------------|------------------------|
+| 0 | 成功。 |
+| 非0 | 失败,参考错误码定义。 |
+
+【芯片差异】
+
+无。
+
+【需求】
+
+- 头文件:mpi_sensor_api.h
+- 库文件:libsensor.a
+
+【注意】
+
+无。
+
+【举例】
+
+无。
+
+【相关主题】
+
+#### 2.2.6 kd_mpi_sensor_reg_read
+
+【描述】
+
+读取sensor寄存器内容
+
+【语法】
+
+k_s32 kd_mpi_sensor_reg_read(k_s32 fd, k_u32 reg_addr, k_u32 \*reg_val)
+
+【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+|--------------|----------------------|---------------|
+| fd | Sensor设备文件描述符 | 输入 |
+| reg_addr | Sensor寄存器地址 | 输入 |
+| reg_val | 读取寄存器内容 | 输出 |
+
+【返回值】
+
+| **返回值** | **描述** |
+|------------|------------------------|
+| 0 | 成功。 |
+| 非0 | 失败,参考错误码定义。 |
+
+【芯片差异】
+
+无。
+
+【需求】
+
+- 头文件:mpi_sensor_api.h
+- 库文件:libsensor.a
+
+【注意】
+
+无。
+
+【举例】
+
+无。
+
+【相关主题】
+
+#### 2.2.7 kd_mpi_sensor_reg_write
+
+【描述】
+
+写sensor寄存器内容
+
+【语法】
+
+k_s32 kd_mpi_sensor_reg_write(k_s32 fd, k_u32 reg_addr, k_u32 reg_val)
+
+【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+|--------------|----------------------|---------------|
+| fd | Sensor设备文件描述符 | 输入 |
+| reg_addr | Sensor寄存器地址 | 输入 |
+| reg_val | 写入sensor寄存器内容 | 输入 |
+
+【返回值】
+
+| **返回值** | **描述** |
+|------------|------------------------|
+| 0 | 成功。 |
+| 非0 | 失败,参考错误码定义。 |
+
+【芯片差异】
+
+无。
+
+【需求】
+
+- 头文件:mpi_sensor_api.h
+- 库文件:libsensor.a
+
+【注意】
+
+无。
+
+【举例】
+
+无。
+
+【相关主题】
+
+#### 2.2.8 kd_mpi_sensor_mode_get
+
+【描述】
+
+获取sensor mode配置
+
+【语法】
+
+k_s32 kd_mpi_sensor_mode_get(k_s32 fd, k_sensor_mode \*mode)
+
+【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+|--------------|-------------------------------|---------------|
+| fd | Sensor设备文件描述符 | 输入 |
+| mode | 返回获取的sensor mode配置参数 | 输出 |
+
+【返回值】
+
+| **返回值** | **描述** |
+|------------|------------------------|
+| 0 | 成功。 |
+| 非0 | 失败,参考错误码定义。 |
+
+【芯片差异】
+
+无。
+
+【需求】
+
+- 头文件:mpi_sensor_api.h
+- 库文件:libsensor.a
+
+【注意】
+
+无。
+
+【举例】
+
+无。
+
+【相关主题】
+
+#### 2.2.9 kd_mpi_sensor_mode_set
+
+【描述】
+
+设置sensor mode配置
+
+【语法】
+
+k_s32 kd_mpi_sensor_mode_get(k_s32 fd, k_sensor_mode mode)
+
+【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+|--------------|-------------------------|---------------|
+| fd | Sensor设备文件描述符 | 输入 |
+| mode | 设置sensor mode配置参数 | 输入 |
+
+【返回值】
+
+| **返回值** | **描述** |
+|------------|------------------------|
+| 0 | 成功。 |
+| 非0 | 失败,参考错误码定义。 |
+
+【芯片差异】
+
+无。
+
+【需求】
+
+- 头文件:mpi_sensor_api.h
+- 库文件:libsensor.a
+
+【注意】
+
+无。
+
+【举例】
+
+无。
+
+【相关主题】
+
+#### 2.2.10 kd_mpi_sensor_stream_enable
+
+【描述】
+
+设置sensor mode配置
+
+【语法】
+
+k_s32 kd_mpi_sensor_stream_enable(k_s32 fd, k_s32 enable)
+
+【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+|--------------|--------------------------------------------------|---------------|
+| fd | Sensor设备文件描述符 | 输入 |
+| enable | 设置sensor流输出状态,0:禁止输出,非0:使能输出 | 输入 |
+
+【返回值】
+
+| **返回值** | **描述** |
+|------------|------------------------|
+| 0 | 成功。 |
+| 非0 | 失败,参考错误码定义。 |
+
+【芯片差异】
+
+无。
+
+【需求】
+
+- 头文件:mpi_sensor_api.h
+- 库文件:libsensor.a
+
+【注意】
+
+无。
+
+【举例】
+
+无。
+
+【相关主题】
+
+#### 2.2.11 kd_mpi_sensor_again_set
+
+【描述】
+
+设置sensor 模拟增益
+
+【语法】
+
+k_s32 kd_mpi_sensor_again_set(k_s32 fd, k_sensor_gain gain)
+
+【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+|--------------|----------------------|---------------|
+| fd | Sensor设备文件描述符 | 输入 |
+| gain | gain配置参数 | 输入 |
+
+【返回值】
+
+| **返回值** | **描述** |
+|------------|------------------------|
+| 0 | 成功。 |
+| 非0 | 失败,参考错误码定义。 |
+
+【芯片差异】
+
+无。
+
+【需求】
+
+- 头文件:mpi_sensor_api.h
+- 库文件:libsensor.a
+
+【注意】
+
+无。
+
+【举例】
+
+无。
+
+【相关主题】
+
+#### 2.2.12 kd_mpi_sensor_again_get
+
+【描述】
+
+获取sensor 模拟增益
+
+【语法】
+
+k_s32 kd_mpi_sensor_again_set(k_s32 fd, k_sensor_gain \*gain)
+
+【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+|--------------|----------------------|---------------|
+| fd | Sensor设备文件描述符 | 输入 |
+| gain | gain配置参数 | 输出 |
+
+【返回值】
+
+| **返回值** | **描述** |
+|------------|------------------------|
+| 0 | 成功。 |
+| 非0 | 失败,参考错误码定义。 |
+
+【芯片差异】
+
+无。
+
+【需求】
+
+- 头文件:mpi_sensor_api.h
+- 库文件:libsensor.a
+
+【注意】
+
+无。
+
+【举例】
+
+无。
+
+【相关主题】
+
+#### 2.2.13 kd_mpi_sensor_dgain_set
+
+【描述】
+
+设置sensor 数字增益
+
+【语法】
+
+k_s32 kd_mpi_sensor_dgain_set(k_s32 fd, k_sensor_gain gain)
+
+【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+|--------------|----------------------|---------------|
+| fd | Sensor设备文件描述符 | 输入 |
+| gain | gain配置参数 | 输入 |
+
+【返回值】
+
+| **返回值** | **描述** |
+|------------|------------------------|
+| 0 | 成功。 |
+| 非0 | 失败,参考错误码定义。 |
+
+【芯片差异】
+
+无。
+
+【需求】
+
+- 头文件:mpi_sensor_api.h
+- 库文件:libsensor.a
+
+【注意】
+
+无。
+
+【举例】
+
+无。
+
+【相关主题】
+
+#### 2.2.14 kd_mpi_sensor_dgain_get
+
+【描述】
+
+获取sensor 数字增益
+
+【语法】
+
+k_s32 kd_mpi_sensor_dgain_get(k_s32 fd, k_sensor_gain \*gain)
+
+【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+|--------------|----------------------|---------------|
+| fd | Sensor设备文件描述符 | 输入 |
+| gain | gain配置参数 | 输出 |
+
+【返回值】
+
+| **返回值** | **描述** |
+|------------|------------------------|
+| 0 | 成功。 |
+| 非0 | 失败,参考错误码定义。 |
+
+【芯片差异】
+
+无。
+
+【需求】
+
+- 头文件:mpi_sensor_api.h
+- 库文件:libsensor.a
+
+【注意】
+
+无。
+
+【举例】
+
+无。
+
+【相关主题】
+
+#### 2.2.15 kd_mpi_sensor_intg_time_set
+
+【描述】
+
+设置sensor 积分时间
+
+【语法】
+
+k_s32 kd_mpi_sensor_intg_time_set(k_s32 fd, k_sensor_intg_time time)
+
+【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+|--------------|----------------------|---------------|
+| fd | Sensor设备文件描述符 | 输入 |
+| time | 积分时间配置参数 | 输入 |
+
+【返回值】
+
+| **返回值** | **描述** |
+|------------|------------------------|
+| 0 | 成功。 |
+| 非0 | 失败,参考错误码定义。 |
+
+【芯片差异】
+
+无。
+
+【需求】
+
+- 头文件:mpi_sensor_api.h
+- 库文件:libsensor.a
+
+【注意】
+
+无。
+
+【举例】
+
+无。
+
+【相关主题】
+
+#### 2.2.16 kd_mpi_sensor_intg_time_get
+
+【描述】
+
+获取sensor 积分时间
+
+【语法】
+
+k_s32 kd_mpi_sensor_intg_time_get(k_s32 fd, k_sensor_intg_time \*time)
+
+【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+|--------------|----------------------|---------------|
+| fd | Sensor设备文件描述符 | 输入 |
+| time | 积分时间配置参数 | 输出 |
+
+【返回值】
+
+| **返回值** | **描述** |
+|------------|------------------------|
+| 0 | 成功。 |
+| 非0 | 失败,参考错误码定义。 |
+
+【芯片差异】
+
+无。
+
+【需求】
+
+- 头文件:mpi_sensor_api.h
+- 库文件:libsensor.a
+
+【注意】
+
+无。
+
+【举例】
+
+无。
+
+【相关主题】
+
+## 3. 数据类型
+
+### 3.1 VICAP
+
+该功能模块的相关数据类型定义如下:
+
+- [k_vicap_sensor_type](#311-k_vicap_sensor_type)
+- [k_vicap_dev](#312-k_vicap_dev)
+- [k_vicap_chn](#313-k_vicap_chn)
+- [k_vicap_csi_num](#314-k_vicap_csi_num)
+- [k_vicap_mipi_lanes](#315-k_vicap_mipi_lanes)
+- [k_vicap_csi_data_type](#316-k_vicap_csi_data_type)
+- [k_vicap_data_source](#317-k_vicap_data_source)
+- [k_vicap_vi_dvp_port](#318-k_vicap_vi_dvp_port)
+- [k_vicap_vi_flash_mode](#319-k_vicap_vi_flash_mode)
+- [k_vicap_img_window](#3110-k_vicap_img_window)
+- [k_vicap_work_mode](#3111-k_vicap_work_mode)
+- [k_vicap_sensor_info](#3112-k_vicap_sensor_info)
+- [k_vicap_dump_format](#3113-k_vicap_dump_format)
+- [k_vicap_dev_attr](#3114-k_vicap_dev_attr)
+- [k_vicap_chn_attr](#3115-k_vicap_chn_attr)
+
+#### 3.1.1 k_vicap_sensor_type
+
+【说明】当前系统支持的sensor类型定义
+
+【定义】
+
+```c
+typedef enum {
+OV_OV9732_MIPI_1920X1080_30FPS_10BIT_LINEAR,
+OV_OV9732_MIPI_1920X1080_30FPS_10BIT_HDR,
+OV_OV9732_MIPI_1280X720_30FPS_10BIT_LINEAR,
+OV_OV9286_MIPI_1920X1080_30FPS_10BIT_LINEAR,
+OV_OV9286_MIPI_1920X1080_30FPS_10BIT_HDR,
+OV_OV9286_MIPI_1280X720_30FPS_10BIT_LINEAR_IR,
+OV_OV9286_MIPI_1280X720_30FPS_10BIT_LINEAR_SPECKLE,
+SENSOR_TYPE_MAX,
+} k_vicap_sensor_type;
+```
+
+【成员】
+
+| **成员名称** | **描述** |
+|----------------------------------------------------|-----------------------------------------|
+| OV_OV9732_MIPI_1920X1080_30FPS_10BIT_LINEAR | OV9732 1080P 10bit 30帧线性输出配置 |
+| OV_OV9732_MIPI_1920X1080_30FPS_10BIT_HDR | OV9732 1080P 10bit 30帧HDR输出配置 |
+| OV_OV9732_MIPI_1280X720_30FPS_10BIT_LINEAR | OV9732 720P 10bit 30帧线性输出配置 |
+| OV_OV9286_MIPI_1920X1080_30FPS_10BIT_LINEAR | OV9286 1080P 10bit 30帧线性输出配置 |
+| OV_OV9286_MIPI_1920X1080_30FPS_10BIT_HDR | OV9286 1080P 10bit 30帧HDR输出配置 |
+| OV_OV9286_MIPI_1280X720_30FPS_10BIT_LINEAR_IR | OV9286 720P 10bit 30帧线性输出 红外配置 |
+| OV_OV9286_MIPI_1280X720_30FPS_10BIT_LINEAR_SPECKLE | OV9286 720P 10bit 30帧线性输出 散斑配置 |
+
+【注意事项】
+
+1. 该列表需要有sensor驱动开发人员维护,应用开发者通过此处定义的sensor type来打开指定类型的sensor设备
+1. 当前版本支持如下类型:
+
+ OV_OV9732_MIPI_1280X720_30FPS_10BIT_LINEAR
+
+ OV_OV9286_MIPI_1280X720_30FPS_10BIT_LINEAR_IR
+
+ OV_OV9286_MIPI_1280X720_30FPS_10BIT_LINEAR_SPECKLE
+
+#### 3.1.2 k_vicap_dev
+
+【说明】vicap设备号定义
+
+【定义】
+
+```c
+typedef enum {
+VICAP_DEV_ID_0 = 0,
+VICAP_DEV_ID_1 = 1,
+VICAP_DEV_ID_2 = 2,
+VICAP_DEV_ID_MAX,
+} k_vicap_dev;
+```
+
+【成员】
+
+| **成员名称** | **描述** |
+|----------------|------------|
+| VICAP_DEV_ID_0 | VICAP设备0 |
+| VICAP_DEV_ID_1 | VICAP设备1 |
+| VICAP_DEV_ID_2 | VICAP设备2 |
+
+#### 3.1.3 k_vicap_chn
+
+【说明】vicap输出通道号定义
+
+【定义】
+
+```c
+typedef enum {
+VICAP_CHN_ID_0 = 0,
+VICAP_CHN_ID_1 = 1,
+VICAP_CHN_ID_2 = 2,
+VICAP_CHN_ID_MAX,
+} k_vicap_chn;
+```
+
+【成员】
+
+| **成员名称** | **描述** |
+|----------------|----------------|
+| VICAP_CHN_ID_0 | VICAP输出通道0 |
+| VICAP_CHN_ID_1 | VICAP输出通道1 |
+| VICAP_CHN_ID_2 | VICAP输出通道2 |
+
+#### 3.1.4 k_vicap_csi_num
+
+【说明】vicap csi标号定义
+
+【定义】
+
+```c
+typedef enum {
+VICAP_CSI0 = 1,
+VICAP_CSI1 = 2,
+VICAP_CSI2 = 3,
+} k_vicap_csi_num;
+```
+
+【成员】
+
+| **成员名称** | **描述** |
+|--------------|----------|
+| VICAP_CSI0 | CSI0 |
+| VICAP_CSI1 | CSI1 |
+| VICAP_CSI2 | CSI2 |
+
+【注意事项】
+
+Sensor连接的CSI号由硬件物理连接决定。
+
+#### 3.1.5 k_vicap_mipi_lanes
+
+【说明】vicap mipi通道数定义
+
+【定义】
+
+```c
+typedef enum {
+VICAP_MIPI_1LANE = 0,
+VICAP_MIPI_2LANE = 1,
+VICAP_MIPI_4LANE = 3,
+} k_vicap_mipi_lanes;
+```
+
+【成员】
+
+| **成员名称** | **描述** |
+|------------------|----------|
+| VICAP_MIPI_1LANE | 1 lane |
+| VICAP_MIPI_2LANE | 2 lane |
+| VICAP_MIPI_4LANE | 4 lane |
+
+【注意事项】
+
+Sensor连接使用的mipi 通道个数由硬件物理连接决定,当使用4lane时,最多只能连接两个sensor。
+
+#### 3.1.6 k_vicap_csi_data_type
+
+【说明】vicap mipi通道数定义
+
+【定义】
+
+```c
+typedef enum {
+VICAP_CSI_DATA_TYPE_RAW8 = 0x2A,
+VICAP_CSI_DATA_TYPE_RAW10 = 0x2B,
+VICAP_CSI_DATA_TYPE_RAW12 = 0x2C,
+VICAP_CSI_DATA_TYPE_RAW14 = 0x2D,
+} k_vicap_csi_data_type;
+```
+
+【成员】
+
+| **成员名称** | **描述** |
+|---------------------------|----------|
+| VICAP_CSI_DATA_TYPE_RAW8 | RAW8 |
+| VICAP_CSI_DATA_TYPE_RAW10 | RAW10 |
+| VICAP_CSI_DATA_TYPE_RAW12 | RAW12 |
+| VICAP_CSI_DATA_TYPE_RAW14 | RAW14 |
+
+【注意事项】
+
+无
+
+#### 3.1.7 k_vicap_data_source
+
+【说明】vicap 数据源
+
+【定义】
+
+```c
+typedef enum {
+VICAP_SOURCE_CSI0 = 0, /**< vicap acquire data from the csi0*/
+VICAP_SOURCE_CSI1 = 1, /**< vicap acquire data from the csi0*/
+VICAP_SOURCE_CSI1_FS_TR0 = 2, /**
+
+## 免责声明
+
+您购买的产品、服务或特性等应受北京嘉楠捷思信息技术有限公司(“本公司”,下同)及其关联公司的商业合同和条款的约束,本文档中描述的全部或部分产品、服务或特性可能不在您的购买或使用范围之内。除非合同另有约定,本公司不对本文档的任何陈述、信息、内容的正确性、可靠性、完整性、适销性、符合特定目的和不侵权提供任何明示或默示的声明或保证。除非另有约定,本文档仅作为使用指导参考。
+
+由于产品版本升级或其他原因,本文档内容将可能在未经任何通知的情况下,不定期进行更新或修改。
+
+## 商标声明
+
+、“嘉楠”和其他嘉楠商标均为北京嘉楠捷思信息技术有限公司及其关联公司的商标。本文档可能提及的其他所有商标或注册商标,由各自的所有人拥有。
+
+**版权所有 © 2023北京嘉楠捷思信息技术有限公司。保留一切权利。**
+非经本公司书面许可,任何单位和个人不得擅自摘抄、复制本文档内容的部分或全部,并不得以任何形式传播。
+
+
+
+## 目录
+
+[TOC]
+
+## 前言
+
+### 概述
+
+本文档主要介绍媒体子系统中系统控制模块的功能和用法,其它模块的功能和用法将各有专门的文档加以论述。
+
+### 读者对象
+
+本文档(本指南)主要适用于以下人员:
+
+- 技术支持工程师
+- 软件开发工程师
+
+### 缩略词定义
+
+| 简称 | 说明 |
+|------|-------------------------------------|
+| mpp | Media Process Platform 媒体处理平台 |
+| vb | video buffer 视频缓存池 |
+
+### 修订记录
+
+| 文档版本号 | 修改说明 | 修改者 | 日期 |
+|------------|----------|--------|----------|
+| V1.0 | 初版 | 郝海波 | 2023/3/4 |
+
+## 1. 概述
+
+### 1.1 概述
+
+系统控制根据 k230芯片特性,完成硬件各个部件的复位、基本初始化工作,同时负责完成 MPP(Media Process Platform 媒体处理平台)系统内存管理,日志管理,绑定管理等模块的初始化、去初始化。
+
+### 1.2 功能描述
+
+#### 1.2.1 视频缓存池
+
+视频缓存池是一组缓冲区(而不是一个),主要提供给多媒体硬件设备使用,并在多媒体硬件设备之间流转。缓存池分为公共缓存池和私有缓存池,公共缓存池主要是针对VI的,使用前要根据VI的图像参数确定缓存块的大小,然后向 申请一定数量的缓存块组成一个缓存池。总体来说,对于VI输入的原始画面,一帧的大小对应一个缓存块的大小,多个缓存块相当于给VI提供了多帧缓存的机制。同时这些公共缓存块也可以给VO或VENC使用。私有的缓存池往往代表存储在内存中的数据是与多媒体设备本身紧密相关的,例如编码的码流数据与实际的图像像素组成的视频流差别还是很大的,这些码流只有编解码器可用,而VB为这些设备提供专用的缓冲池。下图展示了虚拟VI和虚拟VO使用VB进行缓存块流转的流程。
+
+
+
+#### 1.2.2 系统绑定
+
+系统绑定,即通过数据接收者绑定数据源来建立两者之间的关联关系(只允许数据接收者绑定数据源)。绑定后,数据源生成的数据将自动发送给接收者。K230大的语音和视频处理主要分为几个大的模块如下:
+
+语音:语音输入(Audio Input,简称AI), 语音编码(Audio Encoder,简称AENC),语音识别(Audio recognize,简称AREC),语音解码(Audio Decoder,简称ADEC),语音输出(Audio Output,简称AO)
+
+图像:视频输入(Video Input,简称VI),视频编码(Video Encoder,简称VENC),图像旋转(由GSDMA完成,简称DMA),深度处理单元(Depth Process Unit, 简称DPU),图像解码(Video Decoder,简称VDEC),视频输出(Video Output,简称VO),虚拟视频输入(Virtual Video Input,简称VVI),虚拟视频输出(Virtual Video Output,简称VVO)
+
+K230支持的绑定关系如下
+
+表 11
+
+| **数据源** | **数据接收者** | **说明** |
+|-------------------|----------------|----------------------------------------------------------|
+| VI(视频输入) | GSDMA | VI的数据可以送到GSDMA进行旋转处理 |
+| | VO | VI的数据可以直接送到VO进行显示 |
+| | DPU | VI的数据可以直接送到DPU进行处理 |
+| | VENC | VI的数据可以直接送到VENC进行处理 |
+| GSDMA(图像旋转) | VO | GSDMA 处理后的数据,可以直接送给VO显示 |
+| | DPU | GSDMA处理后的数据,可以直接送给DPU进行处理 |
+| | VENC | VPROC处理后的数据,可以直接送给VENC进行编码 |
+| VDEC(视频解码) | GSDMA | VDEC的数据最终会本地播放,播放前可能需要做旋转 |
+| | VO | VDEC的数据最终会本地播放 |
+| DPU(深度处理单元) | 无 | DPU是视频数据的终点,不支持绑定关系 |
+| VENC(视频编码) | 无 | 不支持绑定关系 |
+| VO(视频显示) | 无 | VO是视频数据的终点,不支持绑定关系 |
+| AI(音频输入) | AREC | AI处理后的数据,可以直接送给语音识别模块进行识别 |
+| | AENC | AI处理后的数据,可以直接送给语音编码模块进行编码 |
+| | AO | AI处理后的数据,可以直接进行播放 |
+| ADEC(语音解码) | AO | ADEC处理后的数据,可以直接进行播放 |
+| AREC(语音识别) | AO | AREC处理后的数据,可以直接进行播放,例如本地离线语音翻译 |
+| AENC(语音编码) | 无 | 不支持绑定关系 |
+| AO(音频输出) | 无 | AO是音频数据的终点,不支持绑定关系 |
+
+## 2. API 参考
+
+### 2.1 多媒体内存管理
+
+该功能模块提供以下API:
+
+- [kd\_mpi\_sys\_mmz\_alloc](#211-kd_mpi_sys_mmz_alloc)
+- [kd\_mpi\_sys\_mmz\_alloc\_cached](#212-kd_mpi_sys_mmz_alloc_cached)
+- [kd\_mpi\_sys\_mmap](#213-kd_mpi_sys_mmap)
+- [kd\_mpi\_sys\_mmap\_cached](#214-kd_mpi_sys_mmap_cached)
+- [kd\_mpi\_sys\_munmap](#215-kd_mpi_sys_munmap)
+- [kd\_mpi\_sys\_mmz\_flush\_cache](#216-kd_mpi_sys_mmz_flush_cache)
+- [kd\_mpi\_sys\_mmz\_free](#217-kd_mpi_sys_mmz_free)
+- [kd\_mpi\_sys\_get\_virmem\_info](#218-kd_mpi_sys_get_virmem_info)
+- [kd\_mpi\_vb\_set\_config](#219-kd_mpi_vb_set_config)
+- [kd\_mpi\_vb\_get\_config](#2110-kd_mpi_vb_get_config)
+- [kd\_mpi\_vb\_init](#2111-kd_mpi_vb_init)
+- [kd\_mpi\_vb\_exit](#2112-kd_mpi_vb_exit)
+- [kd\_mpi\_vb\_create\_pool](#2113-kd_mpi_vb_create_pool)
+- [kd\_mpi\_vb\_destory\_pool](#2114-kd_mpi_vb_destory_pool)
+- [kd\_mpi\_vb\_get\_block](#2115-kd_mpi_vb_get_block)
+- [kd\_mpi\_vb\_release\_block](#2116-kd_mpi_vb_release_block)
+- [kd\_mpi\_vb\_phyaddr\_to\_handle](#2117-kd_mpi_vb_phyaddr_to_handle)
+- [kd\_mpi\_vb\_handle\_to\_phyaddr](#2118-kd_mpi_vb_handle_to_phyaddr)
+- [kd\_mpi\_vb\_handle\_to\_pool\_id](#2119-kd_mpi_vb_handle_to_pool_id)
+- [kd\_mpi\_vb\_inquire\_user\_cnt](#2120-kd_mpi_vb_inquire_user_cnt)
+- [kd\_mpi\_vb\_get\_supplement\_attr](#2121-kd_mpi_vb_get_supplement_attr)
+- [kd\_mpi\_vb\_set\_supplement\_config](#2122-kd_mpi_vb_set_supplement_config)
+- [kd\_mpi\_vb\_get\_supplement\_config](#2123-kd_mpi_vb_get_supplement_config)
+- [kd\_mpi\_vb\_set\_mod\_pool\_config](#2124-kd_mpi_vb_set_mod_pool_config)
+- [kd\_mpi\_vb\_get\_mod\_pool\_config](#2125-kd_mpi_vb_get_mod_pool_config)
+- [kd\_mpi\_vb\_init\_mod\_common\_pool](#2126-kd_mpi_vb_init_mod_common_pool)
+- [kd\_mpi\_vb\_exit\_mod\_common\_pool](#2127-kd_mpi_vb_exit_mod_common_pool)
+
+#### 2.1.1 kd_mpi_sys_mmz_alloc
+
+【描述】
+
+在用户空间申请MMZ内存
+
+【语法】
+
+k_s32 kd_mpi_sys_mmz_alloc(k_u64\* phy_addr, void\*\* virt_addr, const k_char\* mmb, const k_char\* zone, k_u32 len);
+
+【参数】
+
+| **参数名称** | **描述** | 输入/输出 |
+|-----------|------------------------------|-----------|
+| phy_addr | 物理地址指针。 | 输出 |
+| virt_addr | 指向虚拟地址指针的指针。 | 输出 |
+| mmb | Mmb 名称的字符串指针。 | 输入 |
+| zone | MMZ zone 名称的字符串指针。 | 输入 |
+| len | 内存块大小。 | 输入 |
+
+【返回值】
+
+| 返回值 | **描述** |
+|--------|-----------------------------------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见[错误码](#412-多媒体内存zone错误码) |
+
+【芯片差异】
+
+无。
+
+【需求】
+
+- 头文件:mpi_sys_api.h
+- 库文件:libsys.a
+
+【注意】
+
+MMZ由多个zone组成,每个zone有多个MMB。你可以调用这个MPI,在MMZ的\*zone分配一个大小为len的内存块\*mmb。在这种情况下,指向物理地址和用户模式虚拟地址的指针被返回。如果在MMZ中存在匿名区,将\*zone设置为null。如果\*mmb被设置为null,创建的MMB就被命名为null。【举例】
+
+无
+
+【相关主题】
+
+无
+
+#### 2.1.2 kd_mpi_sys_mmz_alloc_cached
+
+【描述】
+
+在用户空间申请带cache的MMZ内存
+
+【语法】
+
+k_s32 kd_mpi_sys_mmz_alloc_cached(k_u64\* phy_addr, void\*\* virt_addr, const k_char\* mmb, const k_char\* zone, k_u32 len);
+
+【参数】
+
+| **参数名称** | **描述** | 输入/输出 |
+|-----------|------------------------------|-----------|
+| phy_addr | 物理地址指针。 | 输出 |
+| virt_addr | 指向虚拟地址指针的指针。 | 输出 |
+| mmb | Mmb 名称的字符串指针。 | 输入 |
+| zone | MMZ zone 名称的字符串指针。 | 输入 |
+| len | 内存块大小。 | 输入 |
+
+【返回值】
+
+| 返回值 | **描述** |
+|--------|-----------------------------------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见[错误码](#412-多媒体内存zone错误码) |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_sys_api.h
+- 库文件:libsys.a
+
+【注意】
+
+- [kd_mpi_sys_mmz_alloc_cached](#212-kd_mpi_sys_mmz_alloc_cached)与[kd_mpi_sys_mmz_alloc](#211-kd_mpi_sys_mmz_alloc)之间的区别:通过调用[kd_mpi_sys_mmz_alloc_cached](#212-kd_mpi_sys_mmz_alloc_cached)分配的内存支持缓存,如果要分配的内存将被频繁使用,推荐使用[kd_mpi_sys_mmz_alloc_cached](#212-kd_mpi_sys_mmz_alloc_cached)。这样可以提高CPU的读/写效率和系统性能。
+- 当 cpu 访问此接口分配的内存时,会将内存中的数据放在 cache 中。硬件设备只能访问物理内存而不是缓存。在这种情况下[kd_mpi_sys_mmz_flush_cache](#216-kd_mpi_sys_mmz_flush_cache)需要被调用来同步数据。
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+#### 2.1.3 kd_mpi_sys_mmap
+
+【描述】
+
+memory 存储映射接口。
+
+【语法】
+
+void \*kd_mpi_sys_mmap(k_u64 phy_addr, k_u32 size);
+
+【参数】
+
+| **参数名称** | **描述** | 输入/输出 |
+|----------|--------------------------|-----------|
+| phy_addr | 需映射的内存单元起始地址 | 输入 |
+| size | 映射的字节数 | 输入 |
+
+【返回值】
+
+| 返回值 | **描述** |
+|--------|----------|
+| 0 | 无效地址 |
+| 非0 | 有效地址 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_sys_api.h
+- 库文件:libsys.a
+
+【注意】
+
+- 通过MMZ申请得到的物理地址才可以使用这个API进行映射
+- 如果地址区间属于一个VB,那么映射的大小需要小于VB池的大小
+
+【举例】
+
+无
+
+【相关主题】
+
+[kd_mpi_sys_munmap()](#215-kd_mpi_sys_munmap)
+
+#### 2.1.4 kd_mpi_sys_mmap_cached
+
+【描述】
+
+memory 存储映射带cache的接口。
+
+【语法】
+
+void \*kd_mpi_sys_mmap_cached(k_u64 phy_addr, k_u32 size);
+
+【参数】
+
+| **参数名称** | **描述** | 输入/输出 |
+|----------|--------------------------|-----------|
+| phy_addr | 需映射的内存单元起始地址 | 输入 |
+| size | 映射的字节数 | 输入 |
+
+【返回值】
+
+| 返回值 | **描述** |
+|--------|----------|
+| 0 | 无效地址 |
+| 非0 | 有效地址 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_sys_api.h
+- 库文件:libsys.a
+
+【注意】
+
+- 通过MMZ申请得到的物理地址才可以使用这个API进行映射
+- 如果地址区间属于一个VB,那么映射的大小需要小于VB池的大小
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+#### 2.1.5 kd_mpi_sys_munmap
+
+【描述】
+
+memory 存储映射解除接口。
+
+【语法】
+
+void \*kd_mpi_sys_mmap(void \*virt_addr, k_u32 size);
+
+【参数】
+
+| **参数名称** | **描述** | 输入/输出 |
+|-----------|--------------------|-----------|
+| virt_addr | mmap返回的虚拟地址 | 输入 |
+| size | 映射的字节数 | 输入 |
+
+【返回值】
+
+| 返回值 | **描述** |
+|--------|------|
+| 0 | 成功 |
+| 非0 | 失败 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_sys_api.h
+- 库文件:libsys.a
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+- [kd_mpi_sys_mmap](#213-kd_mpi_sys_mmap)
+- [kd_mpi_sys_mmap_cached](#214-kd_mpi_sys_mmap_cached)
+
+#### 2.1.6 kd_mpi_sys_mmz_flush_cache
+
+【描述】
+
+刷新 cache 里的内容到内存并且使 cache 里的内容无效。
+
+【语法】
+
+k_s32 kd_mpi_sys_mmz_flush_cache(k_u64 phy_addr, void\* virt_addr, k_u32 size);
+
+【参数】
+
+| **参数名称** | **描述** | 输入/输出 |
+|-----------|-------------------------------------------|-----------|
+| phy_addr | 待操作数据的起始物理地址。 | 输入 |
+| virt_addr | 待操作数据的起始虚拟地址指针。不能传 NULL | 输入 |
+| size | 待操作数据的大小 | 输入 |
+
+【返回值】
+
+| 返回值 | **描述** |
+|--------|-----------------------------------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见[错误码](#412-多媒体内存zone错误码) |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_sys_api.h
+- 库文件:libsys.a
+
+【注意】
+
+- 如果缓存中的数据是最新的数据,你需要调用这个MPI来同步数据到内存。这可以确保不能直接访问缓存的硬件可以获得正确的数据。.
+- 必须先调用[kd_mpi_sys_mmz_alloc_cached](#212-kd_mpi_sys_mmz_alloc_cached)然后再使用这个MPI
+- 若将 phy_addr 设为 0,则表示操作整个 cache 区域。(暂不支持)
+- 你需要确保传输的参数是有效的
+- 确保在执行刷新操作时不调用[kd_mpi_sys_mmz_free](#217-kd_mpi_sys_mmz_free)来释放被刷新的内存。否则,不可预知的异常可能会 发生。
+
+【举例】
+
+无
+
+【相关主题】
+
+- [kd_mpi_sys_mmz_alloc_cached](#212-kd_mpi_sys_mmz_alloc_cached)
+- [kd_mpi_sys_mmap_cached](#214-kd_mpi_sys_mmap_cached)
+
+#### 2.1.7 kd_mpi_sys_mmz_free
+
+【描述】
+
+在用户态释放 MMZ 内存。
+
+【语法】
+
+k_s32 kd_mpi_sys_mmz_free(k_u64 phy_addr, void\* virt_addr);
+
+【参数】
+
+| **参数名称** | **描述** | 输入/输出 |
+|-----------|----------------|-----------|
+| phy_addr | 物理地址。 | 输入 |
+| virt_addr | 虚拟地址指针。 | 输入 |
+
+【返回值】
+
+| 返回值 | **描述** |
+|--------|-----------------------------------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见[错误码](#412-多媒体内存zone错误码) |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_sys_api.h
+- 库文件:libsys.a
+
+【注意】
+
+- 输入的地址必须为有效的物理地址,虚拟地址指针可以置为 NULL。
+- 不能释放正在进行 flush 操作的内存,否则会引发不可预知的异常。
+
+【举例】
+
+无
+
+【相关主题】
+
+- [kd_mpi_sys_mmz_alloc](#211-kd_mpi_sys_mmz_alloc)
+- [kd_mpi_sys_mmz_alloc_cached](#212-kd_mpi_sys_mmz_alloc_cached)
+
+#### 2.1.8 kd_mpi_sys_get_virmem_info
+
+【描述】
+
+根据虚拟地址获取对应的内存信息,包括物理地址及 cached 属性
+
+【语法】
+
+k_s32 kd_mpi_sys_get_virmem_info(const void\* virt_addr, k_sys_virmem_info\* mem_info);
+
+【参数】
+
+| **参数名称** | **描述** | 输入/输出 |
+|-----------|---------------------------------------------------------|-----------|
+| virt_addr | 虚拟地址指针。 | 输入 |
+| mem_info | 虚拟地址对应的内存信息,含物理地址、cached 属性等信息。 | 输出 |
+
+【返回值】
+
+| 返回值 | **描述** |
+|--------|-----------------------------------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见[错误码](#412-多媒体内存zone错误码) |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_sys_api.h k_mmz_comm.h
+- 库文件:libsys.a
+
+【注意】
+
+- 输入必须为用户态虚拟地址。
+- 不支持跨进程使用。
+
+【举例】
+
+无
+
+【相关主题】
+
+- [kd_mpi_sys_mmz_alloc](#211-kd_mpi_sys_mmz_alloc)
+- [kd_mpi_sys_mmz_alloc_cached](#212-kd_mpi_sys_mmz_alloc_cached)
+
+#### 2.1.9 kd_mpi_vb_set_config
+
+【描述】
+
+设置 MPP 视频缓存池属性。
+
+【语法】
+
+k_s32 kd_mpi_vb_set_config(const [k_vb_config](#323-k_vb_config) \*config);
+
+【参数】
+
+| **参数名称** | **描述** | 输入/输出 |
+|----------|----------------------|-----------|
+| config | 视频缓存池属性指针。 | 输入 |
+
+【返回值】
+
+| 返回值 | **描述** |
+|--------|-------------------------------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见[错误码](#411-视频缓存池错误码) |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_vb_api.h k_vb_comm.h
+- 库文件:libvb.a
+
+【注意】
+
+- 只能在系统处于未初始化的状态下,才可以设置缓存池属性,否则会返回失败。
+- 公共缓存池中每个缓存块的大小应根据当前图像像素格式以及图像是否压缩而有
+
+ 所不同。具体分配大小请参考 [k_vb_config](#323-k_vb_config) 结构体中的描述。
+
+【举例】
+
+无
+
+【相关主题】
+
+[kd_mpi_vb_get_config](#2110-kd_mpi_vb_get_config)
+
+#### 2.1.10 kd_mpi_vb_get_config
+
+【描述】
+
+获取 MPP 视频缓存池属性。
+
+【语法】
+
+k_s32 kd_mpi_vb_get_config(const [k_vb_config](#323-k_vb_config) \*config);
+
+【参数】
+
+| **参数名称** | **描述** | 输入/输出 |
+|----------|----------------------|-----------|
+| config | 视频缓存池属性指针。 | 输出 |
+
+【返回值】
+
+| 返回值 | **描述** |
+|--------|-------------------------------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见[错误码](#411-视频缓存池错误码) |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_vb_api.h k_vb_comm.h
+- 库文件:libvb.a
+
+【注意】
+
+必须先调用 [kd_mpi_vb_set_config](#219-kd_mpi_vb_set_config) 设置 MPP 视频缓存池属性,再获取属性。
+
+【举例】
+
+无
+
+【相关主题】
+
+[kd_mpi_vb_set_config](#219-kd_mpi_vb_set_config)
+
+#### 2.1.11 kd_mpi_vb_init
+
+【描述】
+
+初始化 MPP 视频缓存池。。
+
+【语法】
+
+k_s32 kd_mpi_vb_init(void);
+
+【参数】
+
+无
+
+【返回值】
+
+| 返回值 | **描述** |
+|--------|-------------------------------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见[错误码](#411-视频缓存池错误码) |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_vb_api.h k_vb_comm.h
+- 库文件:libvb.a
+
+【注意】
+
+- 必须先调用 [kd_mpi_vb_set_config](#219-kd_mpi_vb_set_config) 设置 MPP 视频缓存池属性,再初始化缓存池,否则会失
+ 败。
+- 可反复初始化,不返回失败。
+
+【举例】
+
+无
+
+【相关主题】
+
+[kd_mpi_vb_exit](#2112-kd_mpi_vb_exit)
+
+#### 2.1.12 kd_mpi_vb_exit
+
+【描述】
+
+去初始化 MPP 视频缓存池。。
+
+【语法】
+
+k_s32 kd_mpi_vb_exit(void);
+
+【参数】
+
+无
+
+【返回值】
+
+| 返回值 | **描述** |
+|--------|-------------------------------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见[错误码](#411-视频缓存池错误码) |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_vb_api.h k_vb_comm.h
+- 库文件:libvb.a
+
+【注意】
+
+- 去初始化不会清除先前对缓存池的配置。
+- 可反复去初始化,不返回失败。
+- 退出 VB 池之前请确保 VB 池里的任何 VB 都没有被占用,否则无法退出。
+
+【举例】
+
+无
+
+【相关主题】
+
+[kd_mpi_vb_init](#2111-kd_mpi_vb_init)
+
+#### 2.1.13 kd_mpi_vb_create_pool
+
+【描述】
+
+创建一个视频缓存池
+
+【语法】
+
+k_s32 kd_mpi_vb_create_pool([k_vb_pool_config](#324-k_vb_pool_config) \*config);
+
+【参数】
+
+| **参数名称** | **描述** | 输入/输出 |
+|----------|------------------------|-----------|
+| config | 缓存池配置属性参数指针 | 输入 |
+
+【返回值】
+
+| 返回值 | **描述** |
+|----------------------|--------------------------------------------------|
+| 非 VB_INVALID_POOLID | 有效的缓存池 ID 号 |
+| VB_INVALID_POOLID | 创建缓存池失败,可能是参数非法或者保留内存不够。 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_vb_api.h k_vb_comm.h
+- 库文件:libvb.a
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+[kd_mpi_vb_destory_pool](#2114-kd_mpi_vb_destory_pool)
+
+#### 2.1.14 kd_mpi_vb_destory_pool
+
+【描述】
+
+销毁一个视频缓存池。
+
+【语法】
+
+k_s32 kd_mpi_vb_destory_pool(k_u32 pool_id);
+
+【参数】
+
+| **参数名称** | **描述** | 输入/输出 |
+|----------|----------------------------------------------|-----------|
+| pool_id | 缓存池 ID 号。 取值范围:[0, VB_MAX_POOLS)。 | 输入 |
+
+【返回值】
+
+| 返回值 | **描述** |
+|--------|---------------------------------------------|
+| 0 | 成功。 |
+| 非 0 | 失败,其值参见[错误码](#411-视频缓存池错误码)。 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_vb_api.h k_vb_comm.h
+- 库文件:libvb.a
+
+【注意】
+
+- 销毁一个不存在的缓存池,会返回[K_ERR_VB_UNEXIST](#411-视频缓存池错误码)
+- 只有通过[k_mpi_vb_create_pool](#2113-kd_mpi_vb_create_pool)创建的缓存池才可以销毁
+
+【举例】
+
+无
+
+【相关主题】
+
+[kd_mpi_vb_create_pool](#2113-kd_mpi_vb_create_pool)
+
+#### 2.1.15 kd_mpi_vb_get_block
+
+【描述】
+
+用户态获取一个缓存块
+
+【语法】
+
+k_vb_blk_handle kd_mpi_vb_get_block(k_u32 pool_id, k_u64 blk_size, const k_char \*mmz_name);
+
+【参数】
+
+| **参数名称** | **描述** | 输入/输出 |
+|----------|---------------------------------------------------------|-----------|
+| pool_id | 缓存池 ID 号。 取值范围:[0, VB_MAX_POOLS)。 | 输入 |
+| blk_size | 缓存块大小。 取值范围:数据类型全范围,以 byte 为单位。 | 输入 |
+| mmz_name | 缓存池所在 DDR 的名字。 | 输入 |
+
+【返回值】
+
+| 返回值 | **描述** |
+|----------------------|------------------|
+| 非 VB_INVALID_HANDLE | 有效的缓存块句柄 |
+| VB_INVALID_HANDLE | 获取缓存块失败 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_vb_api.h k_vb_comm.h
+- 库文件:libvb.a
+
+【注意】
+
+- 用户可以在创建一个缓存池之后,调用本接口从该缓存池中获取一个缓存块;即将第 1 个参数 P设置为创建的缓存池 ID;从指定缓存池获取缓存块时,参数mmz_name 无效 \*
+- 如果用户需要从任意一个公共缓存池中获取一块指定大小的缓存块,则可以将第 1个参数 Pool 设置为无效 ID 号(VB_INVALID_POOLID),将第 2 个参数blk_size 设置为需要的缓存块大小,并指定要从哪个 DDR 上的公共缓存池获取缓存块。如果指定的 DDR 上并没有公共缓存池,那么将获取不到缓存块。如果mmz_name 等于 NULL,则表示在匿名DDR 上的公共缓存池获取缓存块。
+
+【举例】
+
+无
+
+【相关主题】
+
+[kd_mpi_vb_release_block](#2116-kd_mpi_vb_release_block)
+
+#### 2.1.16 kd_mpi_vb_release_block
+
+【描述】
+
+用户态释放一个缓存块
+
+【语法】
+
+k_s32 kd_mpi_vb_release_block(k_vb_blk_handle block);
+
+【参数】
+
+| **参数名称** | **描述** | 输入/输出 |
+|----------|-----------|-----------|
+| block | vb 块句柄 | 输入 |
+
+【返回值】
+
+| 返回值 | **描述** |
+|--------|---------------------------------------------|
+| 0 | 成功。 |
+| 非 0 | 失败,其值参见[错误码](#411-视频缓存池错误码)。 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_vb_api.h k_vb_comm.h
+- 库文件:libvb.a
+
+【注意】
+
+获取的缓存块使用完后,应该调用此接口释放缓存块。
+
+【举例】
+
+无
+
+【相关主题】
+
+[kd_mpi_vb_get_block](#2115-kd_mpi_vb_get_block)
+
+#### 2.1.17 kd_mpi_vb_phyaddr_to_handle
+
+【描述】
+
+用户态通过缓存块的物理地址获取其句柄。
+
+【语法】
+
+k_vb_blk_handle kd_mpi_vb_phyaddr_to_handle(k_u64 phys_addr);
+
+【参数】
+
+| **参数名称** | **描述** | 输入/输出 |
+|-----------|-----------|-----------|
+| phys_addr | vb 块句柄 | 输入 |
+
+【返回值】
+
+| 返回值 | **描述** |
+|----------------------|--------------------|
+| 非 VB_INVALID_HANDLE | 有效的缓存块句柄 |
+| VB_INVALID_HANDLE | 获取缓存快句柄失败 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_vb_api.h k_vb_comm.h
+- 库文件:libvb.a
+
+【注意】
+
+物理地址应该是从 MPP 视频缓存池中获取的有效缓存块的地址。
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+#### 2.1.18 kd_mpi_vb_handle_to_phyaddr
+
+【描述】
+
+用户态获取一个缓存块的物理地址
+
+【语法】
+
+k_u64 kd_mpi_vb_handle_to_phyaddr(k_vb_blk_handle block);
+
+【参数】
+
+| **参数名称** | **描述** | 输入/输出 |
+|----------|-----------|-----------|
+| block | vb 块句柄 | 输入 |
+
+【返回值】
+
+| 返回值 | **描述** |
+|--------|------------------------------|
+| 0 | 无效返回值,缓存块句柄非法。 |
+| 非 0 | 有效物理地址。 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_vb_api.h k_vb_comm.h
+- 库文件:libvb.a
+
+【注意】
+
+指定的缓存块应该是从 MPP 视频缓存池中获取的有效缓存块。
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+#### 2.1.19 kd_mpi_vb_handle_to_pool_id
+
+【描述】
+
+用户态获取一个帧缓存块所在缓存池的 ID。
+
+【语法】
+
+k_s32 kd_mpi_vb_handle_to_pool_id(k_vb_blk_handle block);
+
+【参数】
+
+| **参数名称** | **描述** | 输入/输出 |
+|----------|-----------|-----------|
+| block | vb 块句柄 | 输入 |
+
+【返回值】
+
+| 返回值 | **描述** |
+|----------------------|--------------------|
+| 非 VB_INVALID_POOLID | 有效的缓存池 ID 号 |
+| VB_INVALID_POOLID | 获取缓存池ID失败。 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_vb_api.h k_vb_comm.h
+- 库文件:libvb.a
+
+【注意】
+
+指定的缓存块应该是从 MPP 视频缓存池中获取的有效缓存块。
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+#### 2.1.20 kd_mpi_vb_inquire_user_cnt
+
+【描述】
+
+查询缓存块使用计数信息。
+
+【语法】
+
+k_s32 kd_mpi_vb_inquire_user_cnt(k_vb_blk_handle block);
+
+【参数】
+
+| **参数名称** | **描述** | 输入/输出 |
+|----------|-----------|-----------|
+| block | vb 块句柄 | 输入 |
+
+【返回值】
+
+| 返回值 | **描述** |
+|----------|--------------------|
+| K_FAILED | 查询失败 |
+| 其他值 | 缓存块使用计数值。 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_vb_api.h k_vb_comm.h
+- 库文件:libvb.a
+
+【注意】
+
+无。
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+#### 2.1.21 kd_mpi_vb_get_supplement_attr
+
+【描述】
+
+获取 VB Block 内存的辅助信息。
+
+【语法】
+
+k_s32 kd_mpi_vb_get_supplement_attr(k_vb_blk_handle block, [k_video_supplement](#333-k_video_supplement) \*supplement);【参数】
+
+| **参数名称** | **描述** | 输入/输出 |
+|------------|-------------------------------------------------|-----------|
+| block | vb 块句柄 | 输入 |
+| supplement | vb block 内存的辅助信息。 如ISP信息、DCF 信息等 | 输出 |
+
+【返回值】
+
+| 返回值 | **描述** |
+|--------|-------------------------------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见[错误码](#411-视频缓存池错误码) |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_vb_api.h k_vb_comm.h
+- 库文件:libvb.a
+
+【注意】
+
+Supplement保存的DCF和ISP的虚拟地址信息为内核态虚拟地址
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+#### 2.1.22 kd_mpi_vb_set_supplement_config
+
+【描述】
+
+设置 VB 内存的附加信息。
+
+说明
+
+有些信息需要附加在 VB 内存的后面。例如 DCF 信息、ISP 的统计信息、ISP 的一些实时参数
+
+等,这些附加的信息可以跟着 VB 内存在 MPP 各个模块传递。用户态获取 VB 内存,也可以获
+
+取到这些信息。
+
+【语法】
+
+k_s32 kd_mpi_vb_set_supplement_config(const [k_vb_supplement_config](#326-k_vb_supplement_config) \*supplement_config);
+
+【参数】
+
+| **参数名称** | **描述** | 输入/输出 |
+|-------------------|----------------------------------------------------|-----------|
+| supplement_config | VB 内存附加信息控制结构体。 用于附加信息分配内存。 | 输入 |
+
+【返回值】
+
+| 返回值 | **描述** |
+|--------|-------------------------------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见[错误码](#411-视频缓存池错误码) |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_vb_api.h k_vb_comm.h
+- 库文件:libvb.a
+
+【注意】
+
+- 当前支持 2 种 VB 内存附加信息,分别为:
+- DCF 信息,对应结构体[k_jpeg_dcf](#335-k_jpeg_dcf)。对应的 MASK 为VB_SUPPLEMENT_JPEG_MASK。
+- ISP信息,对应结果提[k_isp_frame_info](#334-k_isp_frame_info)。对应的MASK为VB_SUPPLEMENT_ISPINFO_MASK。
+- 需要在 [kd_mpi_vb_init](#2111-kd_mpi_vb_init) 前调用此接口,辅助信息才能生效。
+
+【举例】
+
+无
+
+【相关主题】
+
+[kd_mpi_vb_get_supplement_config](#2123-kd_mpi_vb_get_supplement_config)
+
+#### 2.1.23 kd_mpi_vb_get_supplement_config
+
+【描述】
+
+获取VB 内存的附加信息。
+
+【语法】
+
+k_s32 kd_mpi_vb_set_supplement_config(const [k_vb_supplement_config](#326-k_vb_supplement_config) \*supplement_config);
+
+【参数】
+
+| **参数名称** | **描述** | 输入/输出 |
+|-------------------|----------------------------------------------------|-----------|
+| supplement_config | VB 内存附加信息控制结构体。 用于附加信息分配内存。 | 输出 |
+
+【返回值】
+
+| 返回值 | **描述** |
+|--------|-------------------------------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见[错误码](#411-视频缓存池错误码) |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_vb_api.h k_vb_comm.h
+- 库文件:libvb.a
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+kd_mpi_vb_set_supplement_config
+
+#### 2.1.24 kd_mpi_vb_set_mod_pool_config
+
+【描述】
+
+设置模块公共视频缓存池属性。
+
+【语法】
+
+k_s32 kd_mpi_vb_set_mod_pool_config(k_vb_uid vb_uid, const [k_vb_config](#323-k_vb_config) \*config);
+
+【参数】
+
+| **参数名称** | **描述** | 输入/输出 |
+|----------|-----------------------------------|-----------|
+| vb_uid | 使用模块公共视频缓冲池的模块 ID。 | 输入 |
+| config | 视频缓存池属性指针。 | 输入 |
+
+【返回值】
+
+| 返回值 | **描述** |
+|--------|-------------------------------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见[错误码](#411-视频缓存池错误码) |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_vb_api.h k_vb_comm.h
+- 库文件:libvb.a
+
+【注意】
+
+- 模块公共视频缓冲区的配置根据实际需要配置,否则会造成内存浪
+- 如果模块 VB 已创建,再次配置返回错误码 KD_ERR_VB_BUSY
+
+【举例】
+
+无
+
+【相关主题】
+
+[kd_mpi_vb_get_mod_pool_config](#2125-kd_mpi_vb_get_mod_pool_config)
+
+#### 2.1.25 kd_mpi_vb_get_mod_pool_config
+
+【描述】
+
+获取模块公共视频缓存池属性。
+
+【语法】
+
+k_s32 kd_mpi_vb_get_mod_pool_config(k_vb_uid vb_uid, [k_vb_config](#323-k_vb_config) \*config);
+
+【参数】
+
+| **参数名称** | **描述** | 输入/输出 |
+|----------|-----------------------------------|-----------|
+| vb_uid | 使用模块公共视频缓冲池的模块 ID。 | 输入 |
+| config | 视频缓存池属性指针。 | 输出 |
+
+【返回值】
+
+| 返回值 | **描述** |
+|--------|-------------------------------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见[错误码](#411-视频缓存池错误码) |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_vb_api.h k_vb_comm.h
+- 库文件:libvb.a
+
+【注意】
+
+必须先调用 [kd_mpi_vb_set_mod_pool_config](#2124-kd_mpi_vb_set_mod_pool_config) 设置模块公共视频缓存池属性,再获取属
+
+性。
+
+【举例】
+
+无
+
+【相关主题】
+
+[kd_mpi_vb_set_mod_pool_config](#2124-kd_mpi_vb_set_mod_pool_config)
+
+#### 2.1.26 kd_mpi_vb_init_mod_common_pool
+
+【描述】
+
+初始化模块公共视频缓存池。
+
+【语法】
+
+k_s32 kd_mpi_vb_init_mod_common_pool([k_vb_uid](#322-k_vb_uid) vb_uid);
+
+【参数】
+
+| **参数名称** | **描述** | 输入/输出 |
+|----------|-----------------------------------|-----------|
+| vb_uid | 使用模块公共视频缓冲池的模块 ID。 | 输入 |
+
+【返回值】
+
+| 返回值 | **描述** |
+|--------|-------------------------------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见[错误码](#411-视频缓存池错误码) |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_vb_api.h k_vb_comm.h
+- 库文件:libvb.a
+
+【注意】
+
+- 必须先调用[kd_mpi_vb_init](#2111-kd_mpi_vb_init) 进行公共视频缓冲池初始化。
+- 必须先调用 [kd_mpi_vb_set_mod_pool_config](#2124-kd_mpi_vb_set_mod_pool_config)f配置缓存池属性,再初始化缓存池,否则会失败。
+- 可反复初始化,不返回失败。
+
+【举例】
+
+无
+
+【相关主题】
+
+[kd_mpi_vb_exit_mod_common_pool](#2127-kd_mpi_vb_exit_mod_common_pool)
+
+#### 2.1.27 kd_mpi_vb_exit_mod_common_pool
+
+【描述】
+
+退出模块公共视频缓存池。
+
+【语法】
+
+k_s32 kd_mpi_vb_exit_mod_common_pool([k_vb_uid](#322-k_vb_uid) vb_uid);
+
+【参数】
+
+| **参数名称** | **描述** | 输入/输出 |
+|----------|-----------------------------------|-----------|
+| vb_uid | 使用模块公共视频缓冲池的模块 ID。 | 输入 |
+
+【返回值】
+
+| 返回值 | **描述** |
+|--------|-------------------------------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见[错误码](#411-视频缓存池错误码) |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_vb_api.h k_vb_comm.h
+- 库文件:libvb.a
+
+【注意】
+
+- 必须在调用[kd_mpi_vb_exit](#2112-kd_mpi_vb_exit) 之前调用该接口,否则会返回失败。
+- 退出后会清除先前对模块公共视频缓存池的配置。
+- 可反复退出,不返回失败。
+- 退出 VB 池之前请确保 VB 池里的任何 VB 都没有被占用,否则无法退出。
+
+【举例】
+
+无
+
+【相关主题】
+
+[kd_mpi_vb_init_mod_common_pool](#2126-kd_mpi_vb_init_mod_common_pool)
+
+### 2.2 系统绑定
+
+该功能模块提供以下API:
+
+- [kd_mpi_sys_bind](#221-kd_mpi_sys_bind)
+- [kd_mpi_sys_unbind](#222-kd_mpi_sys_unbind)
+- [kd_mpi_sys_get_bind_by_dest](#223-kd_mpi_sys_get_bind_by_dest)
+
+#### 2.2.1 kd_mpi_sys_bind
+
+【描述】
+
+数据源到数据接收者绑定接口
+
+【语法】
+
+k_s32 kd_mpi_sys_bind([k_mpp_chn](#312-k_mpp_chn) \*src_chn, [k_mpp_chn](#312-k_mpp_chn) \*dest_chn);
+
+【参数】
+
+| **参数名称** | **描述** | 输入/输出 |
+|----------|----------------|-----------|
+| src_chn | 源通道指针。 | 输入 |
+| dest_chn | 目的通道指针。 | 输入 |
+
+【返回值】
+
+| 返回值 | **描述** |
+|--------|-----------------------------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见[错误码](#42-系统绑定错误码) |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_sys_api.h k_module.h
+- 库文件:libsys.a
+
+【注意】
+
+- 系统目前支持的绑定关系,请参见[表 1-1](#411-视频缓存池错误码)。
+- 同一个数据接收者只能绑定一个数据源。
+- 绑定是指数据源和数据接收者建立关联关系。绑定后,数据源生成的数据将自动
+ 发送给接收者
+
+【举例】
+
+无/xx。
+
+【相关主题】
+
+[kd_mpi_sys_unbind](#222-kd_mpi_sys_unbind)
+
+#### 2.2.2 kd_mpi_sys_unbind
+
+【描述】
+
+数据源到数据接收者解绑定接口。
+
+【语法】
+
+k_s32 kd_mpi_sys_unbind([k_mpp_chn](#312-k_mpp_chn) \*src_chn, [k_mpp_chn](#312-k_mpp_chn) \*dest_chn);
+
+【参数】
+
+| **参数名称** | **描述** | 输入/输出 |
+|----------|----------------|-----------|
+| src_chn | 源通道指针。 | 输入 |
+| dest_chn | 目的通道指针。 | 输入 |
+
+【返回值】
+
+| 返回值 | **描述** |
+|--------|-----------------------------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见[错误码](#42-系统绑定错误码) |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_sys_api.h k_module.h
+- 库文件:libsys.a
+
+【注意】
+
+pstDestChn 如果找不到绑定的源通道,则直接返回成功。如果找到了绑定的源通道,
+但是绑定的源通道和 pstSrcChn 不匹配,则返回失败。
+
+【举例】
+
+无/xx。
+
+【相关主题】
+
+[kd_mpi_sys_bind](#221-kd_mpi_sys_bind)
+
+#### 2.2.3 kd_mpi_sys_get_bind_by_dest
+
+【描述】
+
+获取此通道上绑定的源通道的信息。
+
+【语法】
+
+k_s32 kd_mpi_sys_get_bind_by_dest([k_mpp_chn](#312-k_mpp_chn) \*dest_chn, [k_mpp_chn](#312-k_mpp_chn) \*src_chn);
+
+【参数】
+
+| **参数名称** | **描述** | 输入/输出 |
+|----------|----------------|-----------|
+| src_chn | 源通道指针。 | 输出 |
+| dest_chn | 目的通道指针。 | 输入 |
+
+【返回值】
+
+| 返回值 | **描述** |
+|--------|-----------------------------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见[错误码](#42-系统绑定错误码) |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_sys_api.h k_module.h
+- 库文件:libsys.a
+
+【注意】
+
+无
+
+【举例】
+
+无/xx。
+
+【相关主题】
+
+- [kd_mpi_sys_bind](#221-kd_mpi_sys_bind)
+- [kd_mpi_sys_unbind](#222-kd_mpi_sys_unbind)
+
+### 2.3 日志管理
+
+该功能模块提供以下API:
+
+- [kd_mpi_log_set_level_conf](#231-kd_mpi_log_set_level_conf)
+- [kd_mpi_log_get_level_conf](#232-kd_mpi_log_get_level_conf)
+- [kd_mpi_log_set_wait_flag](#233-kd_mpi_log_set_wait_flag)
+- [kd_mpi_log_read](#234-kd_mpi_log_read)
+- [kd_mpi_log_close](#235-kd_mpi_log_close)
+- [kd_mpi_log_set_console](#236-kd_mpi_log_set_console)
+- [kd_mpi_log_get_console](#237-kd_mpi_log_get_console)
+
+#### 2.3.1 kd_mpi_log_set_level_conf
+
+【描述】
+
+设置日志等级。。
+
+【语法】
+
+k_s32 kd_mpi_log_set_level_conf(const [k_log_level_conf](#341-k_log_level_conf) \*conf);
+
+【参数】
+
+| **参数名称** | **描述** | 输入/输出 |
+|----------|-----------------------|-----------|
+| conf | 日志等级信息结构体。 | 输入 |
+
+【返回值】
+
+| 返回值 | **描述** |
+|--------|-----------------------------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见[错误码](#43-日志管理错误码) |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_sys_api.h k_module.h k_log_comm.h
+- 库文件:libsys.a
+
+【注意】
+
+当 conf中的成员 mod_name 设置为字符串“all”时,将设置全部模块的日志等级。否
+则,只设定mod_id指定的模块的日志等级
+
+【举例】
+
+无
+
+【相关主题】
+
+[kd_mpi_log_get_level_conf](#232-kd_mpi_log_get_level_conf)
+
+#### 2.3.2 kd_mpi_log_get_level_conf
+
+【描述】
+
+设置日志等级。。
+
+【语法】
+
+k_s32 kd_mpi_log_get_level_conf([k_log_level_conf](#341-k_log_level_conf) \*conf);
+
+【参数】
+
+| **参数名称** | **描述** | 输入/输出 |
+|-----------------|-----------------------------|-----------|
+| conf-\>mod_id | 需要获取日志等级的模块 ID。 | 输入 |
+| conf-\>level | 获取到的日志等级 | 输出 |
+| conf-\>mod_name | 模块的名字 | 输出 |
+
+【返回值】
+
+| 返回值 | **描述** |
+|--------|-----------------------------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见[错误码](#43-日志管理错误码) |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_sys_api.h k_module.h k_log_comm.h
+- 库文件:libsys.a
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+[kd_mpi_log_set_level_conf](#231-kd_mpi_log_set_level_conf)
+
+#### 2.3.3 kd_mpi_log_set_wait_flag
+
+【描述】
+
+设置读取日志时等待标志。
+
+【语法】
+
+k_s32 kd_mpi_log_set_wait_flag(k_bool is_wait);
+
+【参数】
+
+| **参数名称** | **描述** | 输入/输出 |
+|----------|-----------------------------|-----------|
+| is_wait | 读取日志时是否等待的标志。 | 输入 |
+
+【返回值】
+
+| 返回值 | **描述** |
+|--------|-----------------------------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见[错误码](#43-日志管理错误码) |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_sys_api.h k_module.h k_log_comm.h
+- 库文件:libsys.a
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+#### 2.3.4 kd_mpi_log_read
+
+【描述】
+
+读取日志。
+
+【语法】
+
+k_s32 kd_mpi_log_read(k_char \*buf, k_u32 size);
+
+【参数】
+
+| **参数名称** | **描述** | 输入/输出 |
+|----------|---------------------------|-----------|
+| buf | 用于存放日志的内存指针。 | 输出 |
+| size | 读取日志的大小。 | 输入 |
+
+【返回值】
+
+| 返回值 | **描述** |
+|------------|------------------------|
+| 大于等于 0 | 成功读取的日志的大小。 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_sys_api.h k_module.h k_log_comm.h
+- 库文件:libsys.a
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+#### 2.3.5 kd_mpi_log_close
+
+【描述】
+
+关闭日志文件。。
+
+【语法】
+
+void kd_mpi_log_close(void);
+
+【参数】
+
+无
+
+【返回值】
+
+无
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_sys_api.h k_module.h k_log_comm.h
+- 库文件:libsys.a
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+#### 2.3.6 kd_mpi_log_set_console
+
+【描述】
+
+配置日志是否直接通过控制台打印。
+
+【语法】
+
+k_s32 kd_mpi_log_set_console(k_bool is_console);
+
+【参数】
+
+| **参数名称** | **描述** | 输入/输出 |
+|------------|--------------------|-----------|
+| is_console | 是否通过控制台打印 | 输入 |
+
+【返回值】
+
+| 返回值 | **描述** |
+|--------|-----------------------------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见[错误码](#43-日志管理错误码) |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_sys_api.h k_module.h k_log_comm.h
+- 库文件:libsys.a
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+[kd_mpi_log_get_console](#237-kd_mpi_log_get_console)
+
+#### 2.3.7 kd_mpi_log_get_console
+
+【描述】
+
+获取日志是否直接通过控制台打印。
+
+【语法】
+
+k_s32 kd_mpi_log_set_console(k_bool is_console);
+
+【参数】
+
+| **参数名称** | **描述** | 输入/输出 |
+|------------|--------------------|-----------|
+| is_console | 是否通过控制台打印 | 输出 |
+
+【返回值】
+
+| 返回值 | **描述** |
+|--------|-----------------------------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见[错误码](#43-日志管理错误码) |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_sys_api.h k_module.h k_log_comm.h
+- 库文件:libsys.a
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+[kd_mpi_log_set_console](#236-kd_mpi_log_set_console)
+
+## 3. 数据类型
+
+### 3.1 公共数据类型
+
+该模块有如下数据类型
+
+- [k_mod_id](#311-k_mod_id)
+- [k_mpp_chn](#312-k_mpp_chn)
+
+#### 3.1.1 k_mod_id
+
+【说明】
+
+定义模块 ID 枚举类型。
+
+【定义】
+
+```C
+typedef enum {
+
+K_ID_CMPI = 0, /*< common module platform interface */
+
+K_ID_LOG = 1, /*< mpi device log */
+
+K_ID_MMZ = 2, /*< media memory zone */
+
+K_ID_MMZ_USER_DEV = 3, /*< media memory zone user used */
+
+K_ID_VB = 4, /*< video buffer device */
+
+K_ID_SYS = 5, /*< system contrl device */
+
+K_ID_VI = 6, /*< video in device */
+
+K_ID_VPROC = 7, /*< video proc device */
+
+K_ID_VREC = 8, /*< video recognize device */
+
+K_ID_VENC = 9, /*< video encoding device */
+
+K_ID_VDEC = 10, /*< video decoding device */
+
+K_ID_VO = 11, /*< video output device */
+
+K_ID_AI = 12, /*< audio input device */
+
+K_ID_AREC = 13, /*< audio recognize device */
+
+K_ID_AENC = 14, /*< audio encoding device */
+
+K_ID_ADEC = 15, /*< audio decoding device */
+
+K_ID_AO = 16, /*< audio output device */
+
+K_ID_DPU = 17, /*< depth Process Unit */
+
+K_ID_V_VI, /*< virtual video input device */
+
+K_ID_V_VO, /*< virtual video output device */
+
+K_ID_DMA, /*< dma device */
+
+K_ID_BUTT, /*< Invalid */
+
+} k_mod_id;
+```
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+无
+
+#### 3.1.2 k_mpp_chn
+
+【说明】
+
+定义模块 ID 枚举类型。
+
+【定义】
+
+```C
+typedef struct {
+
+k_mod_id mod_id; /*< Module ID */
+
+k_s32 dev_id; /*< Device ID */
+
+k_s32 chn_id; /*< Channel ID */
+
+} k_mpp_chn;
+```
+
+【成员】
+
+| **成员名称** | **描述** |
+|----------|--------|
+| mod_id | 模块号 |
+| dev_id | 设备号 |
+| chn_id | 通道号 |
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+- [kd_mpi_sys_bind](#221-kd_mpi_sys_bind)
+- [kd_mpi_sys_unbind](#222-kd_mpi_sys_unbind)
+- [kd_mpi_sys_get_bind_by_dest](#223-kd_mpi_sys_get_bind_by_dest)
+
+### 3.2 多媒体内存管理
+
+该模块有如下数据类型
+
+- [VB_MAX_POOLS](#321-vb_max_pools)
+- [k_vb_uid](#322-k_vb_uid)
+- [k_vb_config](#323-k_vb_config)
+- [k_vb_pool_config](#324-k_vb_pool_config)
+- [k_vb_remap_mode](#325-k_vb_remap_mode)
+- [k_vb_supplement_config](#326-k_vb_supplement_config)
+
+#### 3.2.1 VB_MAX_POOLS
+
+【说明】
+
+最大的视频缓存池个数
+
+【定义】
+
+```C
+#define VB_SINGLE_MAX_BLKS 256
+```
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+无
+
+#### 3.2.2 k_vb_uid
+
+【说明】
+
+定义模块 ID 枚举类型。
+
+【定义】
+
+``` C
+typedef enum {
+
+VB_UID_VI = 0,
+
+VB_UID_VPROC = 1,
+
+VB_UID_VREC = 2,
+
+VB_UID_VENC = 3,
+
+VB_UID_VDEC = 4,
+
+VB_UID_VO = 5,
+
+VB_UID_USER = 6,
+
+VB_UID_AI = 7,
+
+VB_UID_AREC = 8,
+
+VB_UID_AENC = 9,
+
+VB_UID_ADEC = 10,
+
+VB_UID_AO = 11,
+
+VB_UID_V_VI = 12,
+
+VB_UID_V_VO = 13,
+
+VB_UID_DMA = 14,
+
+VB_UID_BUTT = 15,
+
+}k_vb_uid;
+```
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+无
+
+#### 3.2.3 k_vb_config
+
+【说明】
+
+定义视频缓存池属性结构体。
+
+【定义】
+
+``` C
+typedef struct {
+
+k_u32 max_pool_cnt;
+
+k_vb_pool_config comm_pool[VB_MAX_COMM_POOLS];
+
+} k_vb_config;
+```
+
+【成员】
+
+| **成员名称** | **描述** |
+|--------------|------------------------------------------------------------|
+| max_pool_cnt | 整个系统中可容纳的缓存池个数。 取值范围:(0, VB_MAX_POOLS] |
+| comm_pool | 公共缓存池属性结构体。 静态属性 |
+
+【注意事项】
+
+- blk_size等于 0 或blk_cnt 等于 0,则对应的缓存池不会被创建。
+- 建议整个结构体先 memset 为 0 再按需赋值。
+
+【相关数据类型及接口】
+
+- kd_mpi_vb_get_config
+
+#### 3.2.4 k_vb_pool_config
+
+【说明】
+
+定义视频缓存池属性结构体。
+
+【定义】
+
+```C
+typedef struct
+
+{
+
+k_u64 blk_size; /*< Size of each VB block*/
+
+k_u32 blk_cnt; /*< Number of blocks*/
+
+k_vb_remap_mode mode; /*< Mapping mode of the kernel mode virtual addresses of the VB*/
+
+char mmz_name[MAX_MMZ_NAME_LEN];/*< Name of the MMZ that allocates the memory for the current VB pool*/
+
+}k_vb_pool_config;
+```
+
+【成员】
+
+| **成员名称** | **描述** |
+|----------|-------------------------------------------------|
+| blk_size | 缓存块大小,以 Byte 位单位。 |
+| blk_cnt | 每个缓存池的缓存块个数。0 \~ VB_SINGLE_MAX_BLKS |
+| mode | VB 的内核态虚拟地址映射模式 |
+| mmz_name | 当前缓存池从哪个 MMZ 区域分配内存。 |
+
+【注意事项】
+
+- 每个缓存块的大小 u64BlkSize 应根据当前图像宽高、像素格式、数据位宽、是否压缩等来计算。
+- 该缓存池是从空闲 MMZ 内存中分配,一个缓存池包含若干个大小相同的缓存块。如果该缓存池的大小超过了保留内存中的空闲空间,则创建缓存池会失败。
+- 用户需保证输入的 DDR 名字已经存在,如果输入不存在 DDR 的名字,会造成分不到内存。如果数组 mmz_name 被 memset 为 0 则表示在没有命名的 DDR 中创建缓存池。
+
+【相关数据类型及接口】
+
+- [kd_mpi_vb_set_config](#219-kd_mpi_vb_set_config)
+- [kd_mpi_vb_create_pool](#2113-kd_mpi_vb_create_pool)
+
+#### 3.2.5 k_vb_remap_mode
+
+【说明】
+
+定义 VB 内核态虚拟地址映射模式。
+
+【定义】
+
+```C
+typedef enum {
+
+VB_REMAP_MODE_NONE = 0, /*< no remap */
+
+VB_REMAP_MODE_NOCACHE = 1, /*< no cache remap */
+
+VB_REMAP_MODE_CACHED = 2, /*< cache remap, if you use this mode, you should flush cache by yourself */
+
+VB_REMAP_MODE_BUTT
+
+} k_vb_remap_mode;
+```
+
+【成员】
+
+| **成员名称** | **描述** |
+|-----------------------|---------------|
+| VB_REMAP_MODE_NONE | 不映射。 |
+| VB_REMAP_MODE_NOCACHE | 映射为nocache |
+| VB_REMAP_MODE_CACHED | 映射为cache |
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+无
+
+#### 3.2.6 k_vb_supplement_config
+
+【说明】
+
+定义 VB 附加信息结构体。
+
+【定义】
+
+```C
+typedef struct
+
+{
+
+k_u32 supplement_config; /*= Lc \>= β V = 4.500 \* Lcfor β \> Lc \>= 0 |
+| HDR10 | V = ( ( c1 + c2 \* Lc n ) ÷ ( 1 + c3 \* Lc n ) )m for all values of Lc c1 = c3 - c2 + 1 = 3424 ÷ 4096 = 0.8359375 c2 = 32 \* 2413 ÷ 4096 = 18.8515625 c3 = 32 \* 2392 ÷ 4096 = 18.6875 m = 128 \* 2523 ÷ 4096 = 78.84375 n = 0.25 \* 2610 ÷ 4096 = 0.1593017578125 for which Lc equal to 1 for peak white is ordinarily intended to correspond to a reference output luminance level of 10000 candelas per square metre |
+| HLG | V = a \* Ln( 12 \* Lc - b ) + c for 1 \>= Lc \> 1 ÷ 12 V = Sqrt( 3 ) \* Lc0.5 for 1 ÷ 12 \>= Lc \>= 0 a = 0.17883277, b = 0.28466892, c = 0.55991073 |
+
+【相关数据类型及接口】
+
+无
+
+#### 3.3.12 k_video_format
+
+【说明】
+
+定义视频格式结构体。
+
+【定义】
+
+```C
+typedef enum
+
+{
+
+VIDEO_FORMAT_LINEAR = 0, /* nature video line */
+
+VIDEO_FORMAT_TILE_64x16, /* tile cell: 64pixel x 16line */
+
+VIDEO_FORMAT_TILE_16x8, /* tile cell: 16pixel x 8line */
+
+VIDEO_FORMAT_LINEAR_DISCRETE, /* The data bits are aligned in bytes */
+
+VIDEO_FORMAT_BUTT
+
+} k_video_format;
+```
+
+【成员】
+
+| **成员名称** | **描述** |
+|------------------------------|------------------------------------------------------------------------------------------|
+| VIDEO_FORMAT_LINEAR | 线性存储的视频格式。 |
+| VIDEO_FORMAT_TILE_64x16 | TILE 格式存储的视频格式,其中 tile 的块大小为 64 像素宽,16 行像素高。 |
+| VIDEO_FORMAT_TILE_16x8 | TILE 格式存储的视频格式,其中 tile 的块大小为 16 像素宽,8 行像素高,也称为小TILE 格式。 |
+| VIDEO_FORMAT_LINEAR_DISCRETE | 线性离散自然行存储数据格式,数据 bit位宽按字节对齐,低位有效,高位无效。 |
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+无
+
+#### 3.3.13 k_video_filed
+
+【说明】
+
+定义视频图像帧场类型。
+
+【定义】
+
+``` C
+typedef enum
+
+{
+
+VIDEO_FIELD_TOP = 0x1, /* even field */
+
+VIDEO_FIELD_BOTTOM = 0x2, /* odd field */
+
+VIDEO_FIELD_INTERLACED = 0x3, /* two interlaced fields */
+
+VIDEO_FIELD_FRAME = 0x4, /* frame */
+
+VIDEO_FIELD_BUTT
+
+} k_video_field;
+```
+
+【成员】
+
+| **成员名称** | **描述** |
+|------------------------|--------------|
+| VIDEO_FIELD_TOP | 顶场类型 |
+| VIDEO_FIELD_BOTTOM | 底场类型 |
+| VIDEO_FIELD_INTERLACED | 俩场间插类型 |
+| VIDEO_FIELD_FRAME | 帧类型 |
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+[k_video_frame](#332-k_video_frame)
+
+#### 3.3.14 k_pixel_format
+
+【说明】
+
+定义像素格式类型。
+
+【定义】
+
+``` C
+typedef enum {
+
+PIXEL_FORMAT_RGB_444 = 0,
+
+PIXEL_FORMAT_RGB_555,
+
+PIXEL_FORMAT_RGB_565,
+
+PIXEL_FORMAT_RGB_888,
+
+PIXEL_FORMAT_BGR_444,
+
+PIXEL_FORMAT_BGR_555,
+
+PIXEL_FORMAT_BGR_565,
+
+PIXEL_FORMAT_BGR_888,
+
+PIXEL_FORMAT_ARGB_1555,
+
+PIXEL_FORMAT_ARGB_4444,
+
+PIXEL_FORMAT_ARGB_8565,
+
+PIXEL_FORMAT_ARGB_8888,
+
+PIXEL_FORMAT_ARGB_2BPP,
+
+PIXEL_FORMAT_ABGR_1555,
+
+PIXEL_FORMAT_ABGR_4444,
+
+PIXEL_FORMAT_ABGR_8565,
+
+PIXEL_FORMAT_ABGR_8888,
+
+PIXEL_FORMAT_RGB_MONOCHROME_8BPP,
+
+PIXEL_FORMAT_RGB_BAYER_8BPP,
+
+PIXEL_FORMAT_RGB_BAYER_10BPP,
+
+PIXEL_FORMAT_RGB_BAYER_12BPP,
+
+PIXEL_FORMAT_RGB_BAYER_14BPP,
+
+PIXEL_FORMAT_RGB_BAYER_16BPP,
+
+PIXEL_FORMAT_YVU_PLANAR_422,
+
+PIXEL_FORMAT_YVU_PLANAR_420,
+
+PIXEL_FORMAT_YVU_PLANAR_444,
+
+PIXEL_FORMAT_YVU_SEMIPLANAR_422,
+
+PIXEL_FORMAT_YVU_SEMIPLANAR_420,
+
+PIXEL_FORMAT_YVU_SEMIPLANAR_444,
+
+PIXEL_FORMAT_YUV_SEMIPLANAR_422,
+
+PIXEL_FORMAT_YUV_SEMIPLANAR_420,
+
+PIXEL_FORMAT_YUV_SEMIPLANAR_444,
+
+PIXEL_FORMAT_YUYV_PACKAGE_422,
+
+PIXEL_FORMAT_YVYU_PACKAGE_422,
+
+PIXEL_FORMAT_UYVY_PACKAGE_422,
+
+PIXEL_FORMAT_VYUY_PACKAGE_422,
+
+PIXEL_FORMAT_YYUV_PACKAGE_422,
+
+PIXEL_FORMAT_YYVU_PACKAGE_422,
+
+PIXEL_FORMAT_UVYY_PACKAGE_422,
+
+PIXEL_FORMAT_VUYY_PACKAGE_422,
+
+PIXEL_FORMAT_VY1UY0_PACKAGE_422,
+
+PIXEL_FORMAT_YUV_400,
+
+PIXEL_FORMAT_UV_420,
+
+/* SVP data format */
+
+PIXEL_FORMAT_BGR_888_PLANAR,
+
+PIXEL_FORMAT_HSV_888_PACKAGE,
+
+PIXEL_FORMAT_HSV_888_PLANAR,
+
+PIXEL_FORMAT_LAB_888_PACKAGE,
+
+PIXEL_FORMAT_LAB_888_PLANAR,
+
+PIXEL_FORMAT_S8C1,
+
+PIXEL_FORMAT_S8C2_PACKAGE,
+
+PIXEL_FORMAT_S8C2_PLANAR,
+
+PIXEL_FORMAT_S8C3_PLANAR,
+
+PIXEL_FORMAT_S16C1,
+
+PIXEL_FORMAT_U8C1,
+
+PIXEL_FORMAT_U16C1,
+
+PIXEL_FORMAT_S32C1,
+
+PIXEL_FORMAT_U32C1,
+
+PIXEL_FORMAT_U64C1,
+
+PIXEL_FORMAT_S64C1,
+
+PIXEL_FORMAT_BUTT
+
+} k_pixel_format;
+```
+
+【成员】
+
+无
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+略
+
+### 3.4 多媒体日志管理
+
+本模块有以下数据结构
+
+- [k_log_level_conf](#341-k_log_level_conf)
+
+#### 3.4.1 k_log_level_conf
+
+【说明】
+
+定义日志等级信息结构体。
+
+【定义】
+
+```C
+typedef struct {
+
+k_mod_id mod_id;
+
+k_s32 level;
+
+k_char mod_name[16];
+
+} k_log_level_conf;
+```
+
+【成员】
+
+| **成员名称** | **描述** |
+|----------|------------|
+| mod_id | 模块的ID |
+| level | 日志等级 |
+| mod_name | 模块的名字 |
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+- [kd_mpi_log_set_level_conf](#231-kd_mpi_log_set_level_conf)
+- [kd_mpi_log_get_level_conf](#232-kd_mpi_log_get_level_conf)
+
+## 4. 错误码
+
+### 4.1 多媒体内存管理错误码
+
+#### 4.1.1 视频缓存池错误码
+
+表 41
+
+| **错误代码** | **宏定义** | **描述** |
+|------------|------------------------|------------------|
+| 0xa0048006 | K_ERR_VB_NULL_PTR | 参数空指针错误 |
+| 0xa004800c | K_ERR_VB_NOMEM | 分配内存失败 |
+| 0xa004800d | K_ERR_VB_NOBUF | 分配缓存失败 |
+| 0xa0048005 | K_ERR_VB_UNEXIST | 视频缓存不存在 |
+| 0xa0048003 | K_ERR_VB_ILLEGAL_PARAM | 参数设置无效 |
+| 0xa0048010 | K_ERR_VB_NOTREADY | 缓存池还未就绪 |
+| 0xa0048012 | K_ERR_VB_BUSY | 系统忙 |
+| 0xa0048009 | K_ERR_VB_NOT_PERM | 操作不允许 |
+| 0xa0048040 | K_ERR_VB_2MPOOLS | 创建的缓存池太多 |
+
+#### 4.1.2 多媒体内存zone错误码
+
+表 42
+
+| **错误代码** | **宏定义** | **描述** |
+|------------|---------------------------------|----------------|
+| 0xa0038003 | K_ERR_MMZ_USERDEV_ILLEGAL_PARAM | 参数设置微小 |
+| 0xa0038006 | K_ERR_MMZ_USERDEV_NULL_PTR | 参数空指针错误 |
+| 0xa0038008 | K_ERR_MMZ_USERDEV_NOT_SUPPORT | 不支持的操作 |
+| 0xa0038009 | K_ERR_MMZ_USERDEV_NOT_PERM | 操作不允许 |
+| 0xa003800c | K_ERR_MMZ_USERDEV_NOMEM | 分配内存失败 |
+| 0xa0038010 | K_ERR_MMZ_USERDEV_NOTREADY | 系统未就绪 |
+| 0xa0038011 | K_ERR_MMZ_USERDEV_BADADDR | 错误的地址 |
+| 0xa0038012 | K_ERR_MMZ_USERDEV_BUSY | 系统忙 |
+
+### 4.2 系统绑定错误码
+
+表 43
+
+| **错误代码** | **宏定义** | **描述** |
+|------------|-------------------------|------------------------------|
+| 0xa0058003 | K_ERR_SYS_ILLEGAL_PARAM | 参数错误 |
+| 0xa0058006 | K_ERR_SYS_NULL_PTR | 空指针错误 |
+| 0xa0058008 | K_ERR_SYS_NOT_SUPPORT | 不支持的功能 |
+| 0xa0058009 | K_ERR_SYS_NOT_PERM | 操作不允许 |
+| 0xa0058010 | K_ERR_SYS_NOTREADY | 系统控制属性未配置 |
+| 0xa0058011 | K_ERR_SYS_BADADDR | 系统忙 |
+| 0xa005800c | K_ERR_SYS_NOMEM | 分配内存失败,如系统内存不足 |
+
+### 4.3 日志管理错误码
+
+表 44
+
+| **错误代码** | **宏定义** | **描述** |
+|------------|-------------------------|------------------------------|
+| 0xa0018003 | K_ERR_LOG_ILLEGAL_PARAM | 参数错误 |
+| 0xa0018006 | K_ERR_LOG_NULL_PTR | 空指针错误 |
+| 0xa0018009 | K_ERR_LOG_NOT_PERM | 操作不允许 |
+| 0xa0018010 | K_ERR_LOG_NOTREADY | 日志设备未就绪 |
+| 0xa001800c | K_ERR_LOG_NOMEM | 分配内存失败,如系统内存不足 |
+
+## 5. 调试信息
+
+### 5.1 概述
+
+调试信息采用了 proc 文件系统,可实时反映当前系统的运行状态,所记录的信息可供问题定位及分析时使用
+
+【文件目录】
+
+/proc/
+
+【文件清单】
+
+| **文件名称** | **描述** |
+|---------------|--------------------------------------|
+| umap/sysbind | 记录当前 系统绑定的情况 |
+| umap/vb | 记录当前 VB 模块的 buffer 使用情况。 |
+| mem-media | 记录当前多媒体内存的使用情况 |
+
+### 5.2 多媒体内存管理
+
+#### 5.2.1 视频缓存池调试信息
+
+【调试信息】
+
+```text
+-----VB PUB CONFIG--------------------------------------------------------------
+MaxPoolCnt
+ 10
+-----VB SUPPLEMENT ATTR---------------------------------------------------------
+Config Size VbCnt
+1 204 21
+-----COMMON POOL CONFIG---------------------------------------------------------
+PoolConfId BlkSize Count RemapMode
+0 8294400 5 CACHED
+1 8192 3 NONE
+2 4096 5 NOCACHE
+-----MODULE COMMON MOD POOL CONFIG of [2]---------------------------------------
+PoolConfId BlkSize Count RemapMode
+0 4096 5 CACHED
+1 8192 3 NONE
+
+-------------------------------------------------------------------------------------
+PoolId PhysAddr VirtAddr IsComm Owner BlkSz BlkCnt Free MinFree
+0 0x18001000 0xc00d1000 1 -1 8294400 5 2 2
+BLK VI VENC VDEC VO USER AI AREC AENC ADEC AO V_VI V_VO DMA DPU
+0 0 0 0 0 1 0 0 0 0 0 0 0 0 0
+1 0 0 0 0 1 0 0 0 0 0 0 0 0 0
+2 0 0 0 0 1 0 0 0 0 0 0 0 0 0
+Sum 0 0 0 0 3 0 0 0 0 0 0 0 0 0
+
+-------------------------------------------------------------------------------------
+PoolId PhysAddr VirtAddr IsComm Owner BlkSz BlkCnt Free MinFree
+1 0x1a78f000 0x0 1 -1 8192 3 3 3
+
+-------------------------------------------------------------------------------------
+PoolId PhysAddr VirtAddr IsComm Owner BlkSz BlkCnt Free MinFree
+2 0x1a796000 0xc2860000 1 -1 4096 5 5 5
+
+-------------------------------------------------------------------------------------
+PoolId PhysAddr VirtAddr IsComm Owner BlkSz BlkCnt Free MinFree
+3 0x1a79c000 0xc2866000 1 2 4096 5 5 5
+
+-------------------------------------------------------------------------------------
+PoolId PhysAddr VirtAddr IsComm Owner BlkSz BlkCnt Free MinFree
+4 0x1a7a2000 0x0 1 2 8192 3 3 3
+```
+
+【调试信息分析】
+
+记录当前VB模块的block使用情况
+
+【参数说明】
+
+| **参数** | **描述** | |
+|--------------------------------------------------------------|------------------------------------------------------------------------|--------------------------------------------------------------------------------------------------------|
+| VB PUB CONFIG | MaxPoolCnt | 最大的缓存池的个数。 |
+| VB SUPPLEMENT ATTR | Config | 视频帧补充信息配置。 |
+| | Size | 视频帧补充信息占用内存空间。 |
+| | VbCnt | 所有 VB 池(共有、私有)包含的的 VB块总数。 |
+| COMMON POOL CONFIG | PoolId | 公共缓存池的句柄。 |
+| | Size | 缓存池内块的大小。 |
+| | Count | 缓存池内块的个数。 |
+| MODULE COMMON POOL CONFIG of VB_UID (模块分配的 公共 VB) | PoolId | 公共缓存池的句柄。 |
+| | Size | 缓存池内块的大小。 |
+| | Count | 缓存池内块的个数。 |
+| NULL(表空,即匿名的DDR) | PoolId | 公共/私有缓存池的句柄。 |
+| | PhysAddr | 公共/私有缓存池的开始物理地址。 |
+| | VirtAddr | 公共/私有缓存池的开始虚拟地址。 |
+| | IsComm | 是否公共缓存池。 取值:{0, 1}。 |
+| | Owner | 缓存池的拥有者。 -2:私有池。 -1:公共池。 ≥0:模块 VB。 |
+| | BlkSz | 缓存池内缓存块的大小。 |
+| | BlkCnt | 缓存池内缓存块的个数。 |
+| | Free | 缓存池空闲缓存块的个数。 |
+| | MinFree | MinFree 程序运行以来,空闲缓存块的最小剩余个数。若该计数为 0,则说明可能存在因缓存块不够而丢帧的情况。 |
+| | BLK | 缓存池内缓存块的句柄。 |
+| | VI/VPROC/VREC/VENC /VDEC/VO/USER/AI/AREC /AENC/ADEC/AO/V_VI/ V_VO/DMA | 模块名 下面对应的数字表示当前模块有多少个 地方占用缓存池内的该缓存块。 0:没占用。 非 0:占用次数 |
+
+### 5.2.2 多媒体内存zone调试信息
+
+【调试信息】
+
+```text
+msh /bin\>cat /proc/media-mem
+
++---ZONE: PHYS(0x18000000, 0x1FEFFFFF), GFP=0, nBYTES=130048KB, NAME="anonymous"
+ |-MMB: phys(0x18000000, 0x18000FFF), kvirt=0xC00D0000, flags=0x00000001, length=4KB, name="sup_nc"
+ |-MMB: phys(0x18001000, 0x1A78DFFF), kvirt=0xC00D1000, flags=0x00000003, length=40500KB, name="vb_pool"
+ |-MMB: phys(0x1A78E000, 0x1A78EFFF), kvirt=0xC285E000, flags=0x00000001, length=4KB, name="sup_nc"
+ |-MMB: phys(0x1A78F000, 0x1A794FFF), kvirt=0x00000000, flags=0x00000000, length=24KB, name="vb_pool"
+ |-MMB: phys(0x1A795000, 0x1A795FFF), kvirt=0xC285F000, flags=0x00000001, length=4KB, name="sup_nc"
+ |-MMB: phys(0x1A796000, 0x1A79AFFF), kvirt=0xC2860000, flags=0x00000001, length=20KB, name="vb_pool"
+ |-MMB: phys(0x1A79B000, 0x1A79BFFF), kvirt=0xC2865000, flags=0x00000001, length=4KB, name="sup_nc"
+ |-MMB: phys(0x1A79C000, 0x1A7A0FFF), kvirt=0xC2866000, flags=0x00000003, length=20KB, name="vb_mod_pool"
+ |-MMB: phys(0x1A7A1000, 0x1A7A1FFF), kvirt=0xC286B000, flags=0x00000001, length=4KB, name="sup_nc"
+ |-MMB: phys(0x1A7A2000, 0x1A7A7FFF), kvirt=0x00000000, flags=0x00000000, length=24KB, name="vb_mod_pool"
+
+---MMZ_USE_INFO:
+ total size=130048KB(127MB),used=40608KB(39MB + 672KB),remain=89440KB(87MB + 352KB),zone_number=1,block_number=10
+
+```
+
+【调试信息分析】
+
+记录当前多媒体内存的使用情况
+
+【参数说明】
+
+无
+
+### 5.3 系统绑定
+
+#### 5.3.1 系统绑定调试信息
+
+【调试信息】
+
+```text
+msh /bin\>cat /proc/umap/sysbind
+
+\-----BIND RELATION TABLE--------------------------------------------------------
+
+FirMod FirDev FirChn SecMod SecDev SecChn TirMod TirDev TirChn SendCnt rstCnt
+
+vvi 0 0 vvo 0 0 null 0 0 42 0
+
+vvi 0 0 vvo 1 1 null 0 0 42 0
+```
+
+【调试信息分析】
+
+记录当前系统绑定的情况
+
+【参数说明】
+
+| **参数** | **描述** |
+|---------|------------------------------------------|
+| FirMod | 数据源的模块号 |
+| FirDev | 数据源的设备号 |
+| FirChn | 数据源的通道号 |
+| SecMod | 第二个模块的模块号(与数据源绑定) |
+| SecDev | 第二个模块的的设备号(与数据源绑定) |
+| SecChn | 第二个模块的的通道号(与数据源绑定) |
+| ThrMod | 第三个模块的模块号(与第二个模块绑定) |
+| ThrDev | 第三个模块的的设备号(与第二个模块绑定) |
+| ThrChn | 第三个模块的的通道号(与第二个模块绑定) |
+| Sendcnt | 数据发送的次数 |
+| Rstcnt | 复位的次数 |
diff --git "a/zh/01_software/board/mpp/K230_\350\247\206\351\242\221\347\274\226\350\247\243\347\240\201_API\345\217\202\350\200\203.md" "b/zh/01_software/board/mpp/K230_\350\247\206\351\242\221\347\274\226\350\247\243\347\240\201_API\345\217\202\350\200\203.md"
new file mode 100755
index 0000000..856d4ca
--- /dev/null
+++ "b/zh/01_software/board/mpp/K230_\350\247\206\351\242\221\347\274\226\350\247\243\347\240\201_API\345\217\202\350\200\203.md"
@@ -0,0 +1,4256 @@
+# K230视频编解码API参考
+
+
+
+版权所有©2023北京嘉楠捷思信息技术有限公司
+
+
+
+## 免责声明
+
+您购买的产品、服务或特性等应受北京嘉楠捷思信息技术有限公司(“本公司”,下同)及其关联公司的商业合同和条款的约束,本文档中描述的全部或部分产品、服务或特性可能不在您的购买或使用范围之内。除非合同另有约定,本公司不对本文档的任何陈述、信息、内容的正确性、可靠性、完整性、适销性、符合特定目的和不侵权提供任何明示或默示的声明或保证。除非另有约定,本文档仅作为使用指导参考。
+
+由于产品版本升级或其他原因,本文档内容将可能在未经任何通知的情况下,不定期进行更新或修改。
+
+## 商标声明
+
+、“嘉楠”和其他嘉楠商标均为北京嘉楠捷思信息技术有限公司及其关联公司的商标。本文档可能提及的其他所有商标或注册商标,由各自的所有人拥有。
+
+**版权所有 © 2023北京嘉楠捷思信息技术有限公司。保留一切权利。**
+非经本公司书面许可,任何单位和个人不得擅自摘抄、复制本文档内容的部分或全部,并不得以任何形式传播。
+
+
+
+## 目录
+
+[TOC]
+
+## 前言
+
+### 概述
+
+本文档主要介绍视频编解码模块的功能和用法。
+
+### 读者对象
+
+本文档(本指南)主要适用于以下人员:
+
+- 技术支持工程师
+- 软件开发工程师
+
+### 缩略词定义
+
+| 简称 | 说明 |
+|------|------|
+| | |
+| | |
+
+### 修订记录
+
+| 文档版本号 | 修改者 | 日期 | 修改说明 |
+|---|---|---|---|
+| V1.0 | 系统软件部 | 2023.03.10 | 初版 |
+| V1.1 | 系统软件部 | 2023.03.31 | 1. 新增2d设置/获取运算模式接口kd_mpi_venc_set_2d_mode、 kd_mpi_venc_get_2d_mode 2.修改2d的参数设置/获取接口,kd_mpi_venc_set_2d_osd_param、 kd_mpi_venc_get_2d_osd_param 3. 新增设置2D运算中的图像格式转换系数接口kd_mpi_venc_set_2d_set_custom_coef 4. kd_mpi_venc_set_2d_set_custom_coef删除编码器属性结构体k_venc_attr的pic_format属性 |
+| V1.1.1 | 系统软件部 | 2023.04.11 | 1. 新增编码图像旋转设置/获取接口 kd_mpi_venc_set_rotaion、 kd_mpi_venc_get_rotaion 2. 新增2D画框属性的设置/获取接口 kd_mpi_venc_set_2d_border_param、 kd_mpi_venc_get_2d_border_param 3. 删除2D运算属性结构体`k_venc_2d_attr`4. 增加OSD背景层格式说明 5. 增加部分MAPI函数接口及数据类型,具体是章节4 MAPI。|
+| V1.2 | 系统软件部 | 2023.04.27 | 1. 修改2D画框结构体k_venc_2d_border_attr的线宽参数 2. 修改2D用户自定义转换系数API名称kd_mpi_venc_set_2d_custom_coef 3. 修改kd_mpi_venc_set_2d_custom_coef的转换系数参数类型。 4. 增加获取转换系数的接口kd_mpi_venc_get_2d_custom_coef 5. 增加色域设置和获取接口kd_mpi_venc_set_2d_color_gamut、kd_mpi_venc_get_2d_color_gamut 6. 修改kd_mpi_venc_set_rotaion的旋转角度参数。7. 修改视频编码功能描述中JPEG的输入格式 |
+| V1.2.1 | 系统软件部 | 2023-04-28 | 1. 在 k_venc_chn_attr中增加GOP属性 |
+| V1.2.2 | 系统软件部 | 2023-05-24 | 1. 增加图像翻转设置/获取接口kd_mpi_venc_set_mirror、kd_mpi_venc_get_mirror 2. 增加IDR帧使能接口kd_mpi_venc_enable_idr |
+| V1.3 | 系统软件部 | 2023-05-25 | 1. mapi增加IDR帧使能接口 kd_mapi_venc_request_idr |
+| V1.3.1 | 系统软件部 | 2023-06-14 | 1. 添加mpi可设置解码输出缩小的图像。kd_mpi_vdec_set_downscale |
+| V1.3.2 | 系统软件部 | 2023-06-19 | 1. 修改kd_mapi_venc_request_idr 2. 增加kd_mpi_venc_request_idr、kd_mapi_venc_enable_idr 3.增加H.265 SAO设置和获取接口kd_mpi_venc_set_h265_sao、kd_mpi_venc_get_h265_sao 4. 增加deblocking设置/获取接口kd_mpi_venc_set_dblk、kd_mpi_venc_get_dblk 5. 增加ROI接口kd_mpi_venc_set_roi_attr、kd_mpi_venc_get_roi_attr |
+| V1.3.3 | 系统软件部 | 2023-06-20 | 1. 增加H.264/H.265熵编码模式设置/获取接口kd_mpi_venc_set_h264_entropy、kd_mpi_venc_get_h264_entropy、kd_mpi_venc_set_h265_entropy、kd_mpi_venc_get_h265_entropy 2. k_venc_rotation枚举更明为k_rotation 3. 增加解码旋转设置接口kd_mpi_vdec_set_rotation |
+| V1.3.4 | 系统软件部 | 2023-06-30 | 修改编解码及2D支持的数据类型 |
+
+## 1. 概述
+
+### 1.1 概述
+
+视频编解码模块,支持H.264、H.265、JPEG编解码。VENC模块实现2D运算和编码功能,两者既可以同时使能,也可以单独运算。VDEC模块实现解码功能。
+
+VENC、VENC+2D和VDEC支持系统绑定,2D单独运算时不支持系统绑定。
+
+### 1.2 功能描述
+
+#### 1.2.1 视频编码
+
+
+
+图1-1编码数据流程图
+
+典型的编码流程包括了输入图像的接收、图像内容的遮挡和覆盖、图像的编码、以及码流的输出等过程。
+
+编码模块由VENC接收通道、编码通道、2D接收通道、2D运算模块组成。编码能力和2D运算能力见下表。
+
+编码数据流程图中的绿色箭头所示路径,为单独做2D运算的流程。蓝色箭头所示路径为单独做编码运算的流程。紫色箭头所示路径为先做2D运算再进行编码的流程。
+
+表 1-1 编码能力
+
+| | H264 | HEVC | JPEG |
+|---|---|---|---|
+| 输入格式 | YUV420 NV12 8bit, ARGB8888, BGRA8888 | YUV420 NV12 8bit, ARGB8888, BGRA8888 | YUV420 NV12 8bit, YUV422 UYVY 8bit, ARGB8888, BGRA8888 |
+| 输出格式 | YUV420 H.264 Baseline Profile(BP) ; H.264 Main Profile(MP) ; H.264 High Profile(HP); H.264 High 10 Profile(HP) | YUV420 HEVC (H.265) Main ; HEVC (H.265) Main 10 Profile | YUV420 and YUV422 JPEG baseline sequential |
+| 最大分辨率 | 3840x2160 | 3840x2160 | 8192x8192 |
+| 码率控制模式 | CBR/VBR/FIXQP | CBR/VBR/FIXQP | FIXQP |
+| GOP | I/P帧 | I/P帧 | - |
+| 编码通道 | 4路 | 4路 | 4路 |
+
+注意:H264/HEVC/JPEG共用4路。
+
+表1-2 2D运算能力
+
+| video输入格式 | video输出格式 | 叠加数据格式 | 最大分辨率 |
+|---|---|---|---|
+| I420/NV12/ARGB8888/BGRA8888 | 同输入格式 | ARGB8888/ARGB4444/ARGB1555 | 3840x2160 |
+
+##### 1.2.1.1 编码通道
+
+编码通道作为基本容器,保存编码通道的多种用户设置和管理编码通道的多种内部资源。编码通道完成图像叠加和编码的功能。2D模块实现图像叠加运算,编码器模块实现图像编码,两者既可以单独使用,也可以协同使用。
+
+
+
+图1-2 编码通道
+
+##### 1.2.1.2 码率控制
+
+码率控制器实现对编码码率进行控制。
+
+从信息学的角度分析,图像的压缩比越低,压缩图像的质量越高;图像压缩比例越高,压缩图像的质量越低。在场景变化的情况下,追求图像质量稳定,则编码码率会波动较大;如追求编码码率稳定,则图像质量会波动较大。
+
+H264/H265编码支持CBR、VBR和FIXQP三种码率控制模式。
+
+MJPEG只支持FIXQP模式。
+
+###### 1.2.1.2.1 CBR
+
+(Constant Bit Rate)固定比特率。即在码率统计时间内保证编码码率平稳。
+
+###### 1.2.1.2.2 VBR
+
+VBR( Variable Bit Rate)可变比特率,即允许在码率统计时间内编码码率波动,从而保证编码图像质量平稳。
+
+###### 1.2.1.2.3 FIXQP
+
+FIXQP固定QP值。在码率统计时间内,编码图像所有宏块QP值相同,采用用户设定的图像QP值。
+
+##### 1.2.1.3 GOP结构
+
+本模块只支持I帧和P帧
+
+##### 1.2.1.4 2D运算
+
+2D运算模块可以实现对图像数据的OSD叠加,OSD模式可以实现8个region图像叠加,各region不重叠。支持的OSD格式有:ARGB4444/ARGB1555/ARGB8888。
+
+###### 1.2.1.4.1 2D转换系数的计算
+
+在OSD叠加运算时,如果输入video的格式为YUV,则OSD层需要做RGB to YUV的转换。内核态有一组默认的转换系数,用户如果需要自定义一组12bit的转换系数。转换系数由RGB to YUV的转换公式得到。
+
+已知,RGB to YUV的转换公式如下:
+
+
+
+则,3\*3矩阵中的系数乘以256后四舍五入取整得到对应的转换系数,3\*1矩阵中的值为对应的转换系数。
+
+以BT709 LIMITED为例,RGB-\>YUV的转换公式为:
+
+Y = 0.1826\*R + 0.6142\*G + 0.0620\*B + 16
+
+U = -0.1007\*R - 0.3385\*G + 0.4392\*B + 128
+
+V = 0.4392\*R - 0.3990\*G - 0.0402\*B + 128
+
+得到,转换系数为:{ 47, 157, 16, 16, -26, -86, 112, 128, 112, -102, -10, 128 }
+
+###### 1.2.1.4.2 2D转换系数的配置
+
+2D转换系数可以通过用户自定义系数接口[kd_mpi_venc_set_2d_custom_coef](#2120-kd_mpi_venc_set_2d_custom_coef)和色域配置接口[kd_mpi_venc_set_2d_color_gamut](#2122-kd_mpi_venc_set_2d_color_gamut)进行配置,两者中选择一个接口进行配置即可。如果两个接口在开始运算前都没有调用,会使用默认系数进行色域转换。
+
+##### 1.2.1.5 限制条件
+
+编码运算存在以下限制:
+
+1. 如果输入数据格式为YUV420,Y、U、V各分量的图像数据的物理起始地址需要保证4k对齐。
+1. 如果输入数据格式为NV12,Y和UV数据的图像数据的物理起始地址需要保证4k对齐。
+
+2D运算存在以下限制:
+
+1. 源图像以及目的图像在ddr的物理起始地址要保证8byte align。
+1. 支持图像、osd、框的尺寸为偶数。
+1. 叠加和画框运算中的video数据的src和dst地址必须相同。
+
+解码运算存在以下限制:
+
+1. 每帧输入数据的物理起始地址需要4k对齐。
+
+##### 1.2.1.6 编码典型应用举例
+
+
+
+图1-3 编码典型应用场景流程图
+
+#### 1.2.2 视频解码
+
+表 12 vpu解码能力
+
+| | H264 | HEVC | JPEG |
+|:--|:--|:--|:--|
+| 输入格式 | H.264 Baseline;H.264 Main;H.264 High;H.264 High10;支持interlaced stream | HEVC (H.265) Main/Main10 | JPEG, baseline sequential |
+| 输出格式 | YUV420 NV12, ARGB8888, BGRA8888 | YUV420 NV12, ARGB8888, BGRA8888 | YUV422 UYVY, YUV420 NV12, ARGB8888, BGRA8888 |
+| 解码通道 | 4路 | 4路 | 4路 |
+
+注意:H264/HEVC/JPEG共用4路。
+
+VDEC支持流式发送:
+
+- 流式发送( K_VDEC_SEND_MODE_STREAM):用户每次可发送任意长度码流到解码器,由解码器内部完成一帧码流的识别过程。须注意,对H.264/H.265而言,在收到下一帧码流才能识别当前帧码流的结束,所以在该发送模式下,输入一帧H.264/H.265码流,不能希望马上开始解码图像。
+
+##### 1.2.2.1 解码典型应用举例
+
+
+
+图1-3 编码典型应用场景流程图
+
+## 2. API参考
+
+### 2.1 视频编码
+
+该功能模块提供以下API:
+
+- [kd_mpi_venc_create_chn](#211-kd_mpi_venc_create_chn):创建编码通道。
+- [kd_mpi_venc_destory_chn](#212-kd_mpi_venc_destory_chn):销毁编码通道。
+- [kd_mpi_venc_start_chn](#213-kd_mpi_venc_start_chn):开启编码通道接收输入图像。
+- [kd_mpi_venc_stop_chn](#214-kd_mpi_venc_stop_chn):停止编码通道接收输入图像。
+- [kd_mpi_venc_query_status](#215-kd_mpi_venc_query_status):查询编码通道状态。
+- [kd_mpi_venc_get_stream](#216-kd_mpi_venc_get_stream):获取编码后的码流。
+- [kd_mpi_venc_release_stream](#217-kd_mpi_venc_release_stream):释放码流缓存。
+- [kd_mpi_venc_send_frame](#218-kd_mpi_venc_send_frame):支持用户发送原始图像进行编码。
+- [kd_mpi_venc_set_rotaion](#219-kd_mpi_venc_set_rotaion):设置编码图像旋转角度。
+- [kd_mpi_venc_get_rotaion](#2110-kd_mpi_venc_get_rotaion):获取编码图像旋转角度。
+- [kd_mpi_venc_set_mirror](#2111-kd_mpi_venc_set_mirror):设置编码图像旋转角度。
+- [kd_mpi_venc_get_mirror](#2112-kd_mpi_venc_get_mirror):获取编码图像翻转方式。
+- [kd_mpi_venc_enable_idr](#2113-kd_mpi_venc_enable_idr):使能IDR帧,根据GOP间隔产生IDR帧。
+- [kd_mpi_venc_set_2d_mode](#2114-kd_mpi_venc_set_2d_mode):设置2D运算模式。
+- [kd_mpi_venc_get_2d_mode](#2115-kd_mpi_venc_get_2d_mode):获取2D运算模式。
+- [kd_mpi_venc_set_2d_osd_param](#2116-kd_mpi_venc_set_2d_osd_param):设置2D运算中OSD的区域属性。
+- [kd_mpi_venc_get_2d_osd_param](#2117-kd_mpi_venc_get_2d_osd_param):获取2D运算中指定索引的OSD的区域属性。
+- [kd_mpi_venc_set_2d_border_param](#2118-kd_mpi_venc_set_2d_border_param):设置2D运算中的画框属性。
+- [kd_mpi_venc_get_2d_border_param](#2119-kd_mpi_venc_get_2d_border_param):获取2D运算中的画框属性。
+- [kd_mpi_venc_set_2d_custom_coef](#2120-kd_mpi_venc_set_2d_custom_coef):设置2D运算中的图像格式转换系数。
+- [kd_mpi_venc_get_2d_custom_coef](#2121-kd_mpi_venc_get_2d_custom_coef):获取2D运算中的图像格式转换系数。
+- [kd_mpi_venc_set_2d_color_gamut](#2122-kd_mpi_venc_set_2d_color_gamut):设置2D运算的色域。
+- [kd_mpi_venc_get_2d_color_gamut](#2123-kd_mpi_venc_get_2d_color_gamut):获取2D运算的色域
+- [kd_mpi_venc_attach_2d](#2124-kd_mpi_venc_attach_2d):将2D运算与venc关联。
+- [kd_mpi_venc_detach_2d](#2125-kd_mpi_venc_detach_2d):将2D运算与venc分离。
+- [kd_mpi_venc_send_2d_frame](#2126-kd_mpi_venc_send_2d_frame):向2D模块发送一帧数据。
+- [kd_mpi_venc_get_2d_frame](#2127-kd_mpi_venc_get_2d_frame):获取2D运算结果。
+- [kd_mpi_venc_start_2d_chn](#2128-kd_mpi_venc_start_2d_chn):开始2D通道接收输入图像。
+- [kd_mpi_venc_stop_2d_chn](#2129-kd_mpi_venc_stop_2d_chn):停止2D通道接收输入图像。
+- [kd_mpi_venc_request_idr](#2130-kd_mpi_venc_request_idr):请求IDR帧,在调用之后立即产生一个IDR帧。
+- [kd_mpi_venc_set_h265_sao](#2131-kd_mpi_venc_set_h265_sao):设置H.265通道的Sao属性。
+- [kd_mpi_venc_get_h265_sao](#2132-kd_mpi_venc_get_h265_sao):获取H.265通道的Sao属性。
+- [kd_mpi_venc_set_dblk](#2133-kd_mpi_venc_set_dblk):设置协议编码通道的Deblocking使能。
+- [kd_mpi_venc_get_dblk](#2134-kd_mpi_venc_get_dblk):获取协议编码通道的Deblocking状态。
+- [kd_mpi_venc_set_roi_attr](#2135-kd_mpi_venc_set_roi_attr):设置H.264/H.265通道的ROI属性。
+- [kd_mpi_venc_get_roi_attr](#2136-kd_mpi_venc_get_roi_attr):获取H.264/H.265通道的ROI属性。
+- [kd_mpi_venc_set_h264_entropy](#2137-kd_mpi_venc_set_h264_entropy):设置H.264协议编码通道的熵编码模式。
+- [kd_mpi_venc_get_h264_entropy](#2138-kd_mpi_venc_get_h264_entropy):获取H.264协议编码通道的熵编码模式。
+- [kd_mpi_venc_set_h265_entropy](#2139-kd_mpi_venc_set_h265_entropy):设置H.265协议编码通道的熵编码模式。
+- [kd_mpi_venc_get_h265_entropy](#2140-kd_mpi_venc_get_h265_entropy):获取H.265协议编码通道的熵编码模式。
+
+#### 2.1.1 kd_mpi_venc_create_chn
+
+【描述】
+创建编码通道。
+
+【语法】
+k_s32 kd_mpi_venc_create_chn(k_u32 chn_num, const [k_venc_chn_attr](#3115-k_venc_chn_attr) \*attr);
+
+【参数】
+| 参数名称 | 描述 | 输入/输出 |
+|---|---|---|
+| chn_num | 编码通道信息。 取值范围:[0, [VENC_MAX_CHN_NUM](#311-venc_max_chn_num))。 | 输入 |
+| attr | 编码通道属性指针。 | 输入 |
+
+【返回值】
+| 返回值 | 描述 |
+|---|---|
+| 0 | 成功。 |
+| 非0 | 失败,参见[错误码](#5-错误码)。 |
+
+【芯片差异】
+无。
+
+【需求】
+
+- 头文件:mpi_venc_api.h,k_type.h,k_module.h,k_sys_comm.h,k_venc_comm.h
+- 库文件:libvenc.a
+
+【注意】
+
+- 编码器支持通道宽高入下表所示:
+
+| H.264/H.265 | JPEG | | | | | | |
+|-------------|--------|-------|--------|------|-----|------|-----|
+| WIDTH | HEIGHT | WIDTH | HEIGHT | | | | |
+| MAX | MIN | MAX | MIN | MAX | MIN | MAX | MIN |
+| 4096 | 128 | 4096 | 64 | 8192 | 128 | 8192 | 64 |
+
+【举例】
+无。
+
+【相关主题】
+无。
+
+#### 2.1.2 kd_mpi_venc_destory_chn
+
+【描述】
+销毁编码通道。
+
+【语法】
+k_s32 kd_mpi_venc_destory_chn(k_u32 chn_num);
+
+【参数】
+| 参数名称 | 描述 | 输入/输出 |
+|---|---|---|
+| chn_num | 编码通道号。 取值范围:[0, [VENC_MAX_CHN_NUM](#311-venc_max_chn_num))。 | 输入 |
+
+【返回值】
+| 返回值 | 描述 |
+|---|---|
+| 0 | 成功。 |
+| 非0 | 失败,参见[错误码](#5-错误码)。 |
+
+【芯片差异】
+无。
+
+【需求】
+
+- 头文件:mpi_venc_api.h,k_type.h,k_module.h,k_sys_comm.h,k_venc_comm.h
+- 库文件:libvenc.a
+
+【注意】
+
+- 销毁前必须停止接收图像,否则返回失败。
+
+【举例】
+无。
+
+【相关主题】
+[kd_mpi_venc_stop_chn](#214-kd_mpi_venc_stop_chn)
+
+#### 2.1.3 kd_mpi_venc_start_chn
+
+【描述】
+开启编码通道接收输入图像。
+
+【语法】
+k_s32 kd_mpi_venc_start_chn(k_u32 chn_num);
+
+【参数】
+| 参数名称 | 描述 | 输入/输出 |
+|---|---|---|
+| chn_num | 编码通道号。 取值范围:[0, [VENC_MAX_CHN_NUM](#311-venc_max_chn_num))。 | 输入 |
+
+【返回值】
+| 返回值 | 描述 |
+|--------|-------------------------------|
+| 0 | 成功。 |
+| 非0 | 失败,参见[错误码](#5-错误码)。 |
+
+【芯片差异】
+无。
+
+【需求】
+
+- 头文件:mpi_venc_api.h,k_type.h,k_module.h,k_sys_comm.h,k_venc_comm.h
+- 库文件:libvenc.a
+
+【注意】
+
+- 如果通道未创建,则返回失败K_ERR_VENC_UNEXIST。
+- 如果通道已经开始接收图像,没有停止接收图像前再一次调用此接口指定接收帧数,返回操作不允许。
+- 只有开启接收之后编码器才开始接收图像编码。
+
+【举例】
+无。
+
+【相关主题】
+[kd_mpi_venc_create_chn](#211-kd_mpi_venc_create_chn)
+[kd_mpi_venc_stop_chn](#214-kd_mpi_venc_stop_chn)
+
+#### 2.1.4 kd_mpi_venc_stop_chn
+
+【描述】
+停止编码通道接收输入图像。
+
+【语法】
+k_s32 kd_mpi_venc_stop_chn(k_u32 chn_num);
+
+【参数】
+| 参数名称 | 描述 | 输入/输出 |
+|---|---|---|
+| chn_num | 编码通道号。 取值范围:[0, [VENC_MAX_CHN_NUM](#311-venc_max_chn_num))。 | 输入 |
+
+【返回值】
+| 返回值 | 描述 |
+|--------|-------------------------------|
+| 0 | 成功。 |
+| 非0 | 失败,参见[错误码](#5-错误码)。 |
+
+【芯片差异】
+无。
+
+【需求】
+
+- 头文件:mpi_venc_api.h,k_type.h,k_module.h,k_sys_comm.h,k_venc_comm.h
+- 库文件:libvenc.a
+
+【注意】
+
+- 如果通道未创建,则返回失败。
+- 此接口并不判断当前是否停止接收,即允许重复停止接收不返回错误。
+- 此接口用于编码通道停止接收图像来编码,在编码通道销毁或复位前必须停止接收图像。
+- 调用此接口仅停止接收原始数据编码,码流buffer并不会被清除。
+
+【举例】
+无。
+
+【相关主题】
+[kd_mpi_venc_destory_chn](#212-kd_mpi_venc_destory_chn)
+
+#### 2.1.5 kd_mpi_venc_query_status
+
+【描述】
+查询编码通道状态。
+
+【语法】
+k_s32 kd_mpi_venc_query_status(k_u32 chn_num, [k_venc_chn_status](#3115-k_venc_chn_attr) \*status);
+
+【参数】
+| 参数名称 | 描述 | 输入/输出 |
+|---|---|---|
+| chn_num | 编码通道号。 取值范围:[0, [VENC_MAX_CHN_NUM](#311-venc_max_chn_num))。 | 输入 |
+| status | 编码通道的状态指针。 | 输出 |
+
+【返回值】
+| 返回值 | 描述 |
+|---|---|
+| 0 | 成功。 |
+| 非0 | 失败,参见[错误码](#5-错误码)。 |
+
+【芯片差异】
+无。
+
+【需求】
+
+- 头文件:mpi_venc_api.h,k_type.h,k_module.h,k_sys_comm.h,k_venc_comm.h
+- 库文件:libvenc.a
+
+【注意】
+
+- 如果通道未创建,则返回失败。
+
+【举例】
+无。
+
+【相关主题】
+[kd_mpi_venc_create_chn](#211-kd_mpi_venc_create_chn)
+
+#### 2.1.6 kd_mpi_venc_get_stream
+
+【描述】
+获取编码后的码流。
+
+【语法】
+k_s32 kd_mpi_venc_get_stream(k_u32 chn_num, [k_venc_stream](#3123-k_venc_stream) \*stream, k_s32 milli_sec);
+
+【参数】
+| 参数名称 | 描述 | 输入/输出 |
+|---|---|---|
+| chn_num | 编码通道号。 取值范围:[0, [VENC_MAX_CHN_NUM](#311-venc_max_chn_num))。 | 输入 |
+| stream | 码流结构体指针. | 输出 |
+| milli_sec | 获取码流超时时间。 取值范围: [-1, +∞ ) -1:阻塞。 0:非阻塞。 大于0:超时时间 | 输入 |
+
+【返回值】
+| 返回值 | 描述 |
+|--------|-------------------------------|
+| 0 | 成功。 |
+| 非0 | 失败,参见[错误码](#5-错误码)。 |
+
+【芯片差异】
+无。
+
+【需求】
+
+- 头文件:mpi_venc_api.h,k_type.h,k_module.h,k_sys_comm.h,k_venc_comm.h
+- 库文件:libvenc.a
+
+【注意】
+
+- 如果通道未创建,返回失败。
+- 如果stream为空,返回K_ERR_VENC_NULL_PTR。
+- 如果milli_sec小于-1,返回K_ERR_VENC_ILLEGAL_PARAM。
+
+【举例】
+无。
+
+【相关主题】
+[kd_mpi_venc_create_chn](#211-kd_mpi_venc_create_chn)
+[kd_mpi_venc_start_chn](#213-kd_mpi_venc_start_chn)
+
+#### 2.1.7 kd_mpi_venc_release_stream
+
+【描述】
+释放码流缓存。
+
+【语法】
+k_s32 kd_mpi_venc_release_stream(k_u32 chn_num, [k_venc_stream](#3123-k_venc_stream) \*stream);
+
+【参数】
+| 参数名称 | 描述 | 输入/输出 |
+|---|---|---|
+| chn_num | 编码通道号。 取值范围:[0, [VENC_MAX_CHN_NUM](#311-venc_max_chn_num))。 | 输入 |
+| stream | 码流结构体指针。 | 输出 |
+
+【返回值】
+| 返回值 | 描述 |
+|---|---|
+| 0 | 成功。 |
+| 非0 | 失败,参见[错误码](#5-错误码)。 |
+
+【芯片差异】
+无。
+
+【需求】
+
+- 头文件:mpi_venc_api.h,k_type.h,k_module.h,k_sys_comm.h,k_venc_comm.h
+- 库文件:libvenc.a
+
+【注意】
+
+- 如果通道未创建,则返回错误码K_ERR_VENC_UNEXIST。
+- 如果stream为空,则返回错误码K_ERR_VENC_NULL_PTR。
+
+【举例】
+无。
+
+【相关主题】
+[kd_mpi_venc_create_chn](#211-kd_mpi_venc_create_chn)
+[kd_mpi_venc_start_chn](#213-kd_mpi_venc_start_chn)
+
+#### 2.1.8 kd_mpi_venc_send_frame
+
+【描述】
+支持用户发送原始图像进行编码。
+
+【语法】
+k_s32 kd_mpi_venc_send_frame(k_u32 chn_num, k_video_frame_info \*frame, k_s32 milli_sec);
+
+【参数】
+| 参数名称 | 描述 | 输入/输出 |
+|---|---|---|
+| chn_num | 编码通道号。 取值范围:[0, [VENC_MAX_CHN_NUM](#311-venc_max_chn_num))。 | 输入 |
+| frame | 原始图像信息结构指针,参考《K230 系统控制 API参考》。 | 输入 |
+| milli_sec | 发送图像超时时间。 取值范围: [-1,+∞ ) -1:阻塞。 0:非阻塞。 \> 0:超时时间。 | 输入 |
+
+【返回值】
+| 返回值 | 描述 |
+|---|---|
+| 0 | 成功。 |
+| 非0 | 失败,参见[错误码](#5-错误码)。 |
+
+【芯片差异】
+无。
+
+【需求】
+
+- 头文件:mpi_venc_api.h,k_type.h,k_module.h,k_sys_comm.h,k_venc_comm.h
+- 库文件:libvenc.a
+
+【注意】
+
+- 此接口支持用户发送图像至编码通道。
+- 如果milli_sec小于-1,返回K_ERR_VENC_ILLEGAL_PARAM。
+- 调用该接口发送图像,用户需要保证编码通道已创建且开启接收输入图像。
+
+【举例】
+无。
+
+【相关主题】
+[kd_mpi_venc_create_chn](#211-kd_mpi_venc_create_chn)
+[kd_mpi_venc_start_chn](#213-kd_mpi_venc_start_chn)
+
+#### 2.1.9 kd_mpi_venc_set_rotaion
+
+【描述】
+设置编码图像旋转角度。
+
+【语法】
+k_s32 kd_mpi_venc_set_rotaion(k_u32 chn_num, const [k_rotation](#3112-k_rotation) rotation);
+
+【参数】
+| 参数名称 | 描述 | 输入/输出 |
+|---|---|---|
+| chn_num | 通道号。 取值范围:[0, [VENC_MAX_CHN_NUM](#311-venc_max_chn_num))。 | 输入 |
+| rotation | 旋转角度枚举。 | 输入 |
+
+【返回值】
+| 返回值 | 描述 |
+|--------|-------------------------------|
+| 0 | 成功。 |
+| 非0 | 失败,返回[错误码](#5-错误码)。 |
+
+【芯片差异】
+无。
+
+【需求】
+
+- 头文件:mpi_venc_api.h,k_type.h,k_module.h,k_sys_comm.h,k_venc_comm.h
+- 库文件:libvenc.a
+
+【注意】
+无。
+
+【举例】
+无。
+
+【相关主题】
+无。
+
+#### 2.1.10 kd_mpi_venc_get_rotaion
+
+【描述】
+获取编码图像旋转角度。
+
+【语法】
+k_s32 kd_mpi_venc_get_rotaion(k_u32 chn_num, [k_rotation](3113-k_rotation) \*rotation);
+
+【参数】
+| 参数名称 | 描述 | 输入/输出 |
+|---|---|---|
+| chn_num | 通道号。 取值范围:[0, [VENC_MAX_CHN_NUM](#311-venc_max_chn_num))。 | 输入 |
+| rotation | 旋转角度枚举指针。 | 输出 |
+
+【返回值】
+| 返回值 | 描述 |
+|--------|-------------------------------|
+| 0 | 成功。 |
+| 非0 | 失败,返回[错误码](#5-错误码)。 |
+
+【芯片差异】
+无。
+
+【需求】
+
+- 头文件:mpi_venc_api.h,k_type.h,k_module.h,k_sys_comm.h,k_venc_comm.h
+- 库文件:libvenc.a
+
+【注意】
+无。
+
+【举例】
+无。
+
+【相关主题】
+无。
+
+#### 2.1.11 kd_mpi_venc_set_mirror
+
+【描述】
+设置编码图像旋转角度。
+
+【语法】
+k_s32 kd_mpi_venc_set_mirror(k_u32 chn_num, const [k_venc_mirror](#3113-k_venc_mirror) mirror);
+
+【参数】
+| 参数名称 | 描述 | 输入/输出 |
+|---|---|---|
+| chn_num | 通道号。取值范围:[0, VENC_MAX_CHN_NUM)。 | 输入 |
+| mirror | 翻转方式枚举。 | 输入 |
+
+【返回值】
+| 返回值 | 描述 |
+|---|---|
+| 0 | 成功。 |
+| 非0 | 失败,返回[错误码](#5-错误码)。 |
+
+【芯片差异】
+无。
+【需求】
+
+- 头文件:mpi_venc_api.h,k_type.h,k_module.h,k_sys_comm.h,k_venc_comm.h
+- 库文件:libvenc.a
+
+【注意】
+无。
+【举例】
+无。
+【相关主题】
+无。
+
+#### 2.1.12 kd_mpi_venc_get_mirror
+
+【描述】
+设置编码图像旋转角度。
+【语法】
+| k_s32 kd_mpi_venc_get_mirror(k_u32 chn_num, [k_venc_mirror](#3113-k_venc_mirror) mirror);|
+|---|
+
+【参数】
+| 参数名称 | 描述 | 输入/输出 |
+|---|---|---|
+| chn_num | 通道号。取值范围:[0, VENC_MAX_CHN_NUM)。 | 输入 |
+| mirror | 翻转方式枚举。 | 输出 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|---|---|
+| 0 | 成功。 |
+| 非0 | 失败,返回[错误码](#5-错误码)。 |
+
+【芯片差异】
+无。
+【需求】
+
+- 头文件:mpi_venc_api.h,k_type.h,k_module.h,k_sys_comm.h,k_venc_comm.h
+- 库文件:libvenc.a
+
+【注意】
+无。
+【举例】
+无。
+【相关主题】
+无。
+
+#### 2.1.13 kd_mpi_venc_enable_idr
+
+【描述】
+设置IDR帧使能。
+
+【语法】
+k_s32 kd_mpi_venc_enable_idr(k_u32 chn_num, const k_bool idr_enable);
+
+【参数】
+| 参数名称 | 描述 | 输入/输出 |
+|---|---|---|
+| chn_num | 通道号。 取值范围:[0, [K_VENC_2D_MAX_CHN_NUM](#311-venc_max_chn_num))。 | 输入 |
+| idr_enable | 是否使能IDR帧。0:不使能。1:使能。 | 输入 |
+
+【返回值】
+| 返回值 | 描述 |
+|--------|-------------------------------|
+| 0 | 成功。 |
+| 非0 | 失败,返回[错误码](#5-错误码)。 |
+
+【芯片差异】
+无。
+
+【需求】
+
+- 头文件:mpi_venc_api.h,k_type.h,k_module.h,k_sys_comm.h,k_venc_comm.h
+- 库文件:libvenc.a
+
+【注意】
+
+- 本接口需要在创建编码通道之后,开始编码通道之前调用。
+
+【举例】
+无。
+
+【相关主题】
+无。
+
+#### 2.1.14 kd_mpi_venc_set_2d_mode
+
+【描述】
+设置2D运算模式。
+
+【语法】
+k_s32 kd_mpi_venc_set_2d_mode(k_u32 chn_num, const [k_venc_2d_calc_mode](#318-k_venc_2d_calc_mode) mode);
+
+【参数】
+| 参数名称 | 描述 | 输入/输出 |
+|---|---|---|
+| chn_num | 通道号。 取值范围:[0, [K_VENC_2D_MAX_CHN_NUM](#311-venc_max_chn_num))。 | 输入 |
+| mode | 2D运算模式枚举。 | 输入 |
+
+【返回值】
+| 返回值 | 描述 |
+|---|---|
+| 0 | 成功。 |
+| 非0 | 失败,返回[错误码](#5-错误码)。 |
+
+【芯片差异】
+无。
+
+【需求】
+
+- 头文件:mpi_venc_api.h,k_type.h,k_module.h,k_sys_comm.h,k_venc_comm.h
+- 库文件:libvenc.a
+
+【注意】
+
+- 目前运算模式不支持K_VENC_2D_CALC_MODE_CSC模式。
+
+【举例】
+无。
+
+【相关主题】
+无。
+
+#### 2.1.15 kd_mpi_venc_get_2d_mode
+
+【描述】
+获取2D运算模式。
+
+【语法】
+k_s32 kd_mpi_venc_get_2d_mode(k_u32 chn_num, [k_venc_2d_calc_mode](#318-k_venc_2d_calc_mode) \*mode);
+
+【参数】
+| 参数名称 | 描述 | 输入/输出 |
+|---|---|---|
+| chn_num | 通道号。 取值范围:[0, [K_VENC_2D_MAX_CHN_NUM](#311-venc_max_chn_num))。 | 输入 |
+| mode | 2D运算模式枚举指针。 | 输出 |
+
+【返回值】
+| 返回值 | 描述 |
+|---|---|
+| 0 | 成功。 |
+| 非0 | 失败,返回[错误码](#5-错误码)。 |
+
+【芯片差异】
+无。
+
+【需求】
+
+- 头文件:mpi_venc_api.h,k_type.h,k_module.h,k_sys_comm.h,k_venc_comm.h
+
+- 库文件:libvenc.a
+
+【注意】
+
+- 目前运算模式不支持K_VENC_2D_CALC_MODE_CSC模式。
+
+【举例】
+无。
+
+【相关主题】
+无。
+
+#### 2.1.16 kd_mpi_venc_set_2d_osd_param
+
+【描述】
+设置2D运算中OSD的区域属性。
+
+【语法】
+k_s32 kd_mpi_venc_set_2d_osd_param(k_u32 chn_num, k_u8 index, const [k_venc_2d_osd_attr](#3125-k_venc_2d_osd_attr) \*attr);
+
+【参数】
+| 参数名称 | 描述 | 输入/输出 |
+|---|---|---|
+| chn_num | 通道号。 取值范围:[0, [K_VENC_2D_MAX_CHN_NUM](#311-venc_max_chn_num))。 | 输入 |
+| index | OSD区域索引。 取值范围:[0, [K_VENC_MAX_2D_OSD_REGION_NUM](#312-k_venc_max_2d_osd_region_num))。 | 输入 |
+| attr | OSD属性指针。 | 输入 |
+
+【返回值】
+| 返回值 | 描述 |
+|--------|-------------------------------|
+| 0 | 成功。 |
+| 非0 | 失败,返回[错误码](#5-错误码)。 |
+
+【芯片差异】
+无。
+
+【需求】
+
+- 头文件:mpi_venc_api.h,k_type.h,k_module.h,k_sys_comm.h,k_venc_comm.h
+- 库文件:libvenc.a
+
+【注意】
+
+- 如果有n个叠加区域,索引值应分别设置为0\~n-1。
+
+【举例】
+无。
+
+【相关主题】
+无。
+
+#### 2.1.17 kd_mpi_venc_get_2d_osd_param
+
+【描述】
+获取2D运算中指定索引的OSD的区域属性。
+
+【语法】
+k_s32 kd_mpi_venc_get_2d_osd_param(k_u32 chn_num, k_u8 index, const [k_venc_2d_osd_attr](#3125-k_venc_2d_osd_attr) \*attr);
+
+【参数】
+| 参数名称 | 描述 | 输入/输出 |
+|---|---|---|
+| chn_num | 通道号。 取值范围:[0, [K_VENC_2D_MAX_CHN_NUM](#311-venc_max_chn_num))。 | 输入 |
+| index | OSD区域索引。 取值范围:[0, [K_VENC_MAX_2D_OSD_REGION_NUM](#312-k_venc_max_2d_osd_region_num))。 | 输入 |
+| attr | OSD属性指针。 | 输出 |
+
+【返回值】
+| 返回值 | 描述 |
+|--------|-------------------------------|
+| 0 | 成功。 |
+| 非0 | 失败,返回[错误码](#5-错误码)。 |
+
+【芯片差异】
+无。
+
+【需求】
+
+- 头文件:mpi_venc_api.h,k_type.h,k_module.h,k_sys_comm.h,k_venc_comm.h
+- 库文件:libvenc.a
+
+【注意】
+无。
+
+【举例】
+无。
+
+【相关主题】
+无。
+
+#### 2.1.18 kd_mpi_venc_set_2d_border_param
+
+【描述】
+设置2D运算中的画框属性。
+
+【语法】
+k_s32 kd_mpi_venc_set_2d_border_param(k_u32 chn_num, k_u8 index, const [k_venc_2d_border_attr](#3126-k_venc_2d_border_attr) \*attr);
+
+【参数】
+| 参数名称 | 描述 | 输入/输出 |
+|---|---|---|
+| chn_num | 通道号。 取值范围:[0, [K_VENC_2D_MAX_CHN_NUM](#311-venc_max_chn_num))。 | 输入 |
+| index | 画框索引。 取值范围:[0, [K_VENC_MAX_2D_BORDER_NUM](#313-k_venc_max_2d_border_num))。 | 输入 |
+| attr | 画框属性指针。 | 输入 |
+
+【返回值】
+| 返回值 | 描述 |
+|--------|-------------------------------|
+| 0 | 成功。 |
+| 非0 | 失败,返回[错误码](#5-错误码)。 |
+
+【芯片差异】
+无。
+
+【需求】
+
+- 头文件:mpi_venc_api.h,k_type.h,k_module.h,k_sys_comm.h,k_venc_comm.h
+- 库文件:libvenc.a
+
+【注意】
+
+- 如果有n个框,索引值应分别设置为0\~n-1。
+
+【举例】
+无。
+
+【相关主题】
+无。
+
+#### 2.1.19 kd_mpi_venc_get_2d_border_param
+
+【描述】
+获取2D运算中的画框属性。
+
+【语法】
+k_s32 kd_mpi_venc_get_2d_border_param(k_u32 chn_num, k_u8 index, [k_venc_2d_border_attr](#3126-k_venc_2d_border_attr) \*attr);
+
+【参数】
+| 参数名称 | 描述 | 输入/输出 |
+|---|---|---|
+| chn_num | 通道号。 取值范围:[0, [K_VENC_2D_MAX_CHN_NUM](#311-venc_max_chn_num))。 | 输入 |
+| index | 画框索引。 取值范围:[0, [K_VENC_MAX_2D_BORDER_NUM](#313-k_venc_max_2d_border_num))。 | 输入 |
+| attr | 画框属性指针。 | 输出 |
+
+【返回值】
+| 返回值 | 描述 |
+|---|---|
+| 0 | 成功。 |
+| 非0 | 失败,返回[错误码](#5-错误码)。 |
+
+【芯片差异】
+无。
+
+【需求】
+
+- 头文件:mpi_venc_api.h,k_type.h,k_module.h,k_sys_comm.h,k_venc_comm.h
+- 库文件:libvenc.a
+
+【注意】
+无。
+
+【举例】
+无。
+
+【相关主题】
+无。
+
+#### 2.1.20 kd_mpi_venc_set_2d_custom_coef
+
+【描述】
+设置2D运算中的图像格式转换系数。
+
+【语法】
+k_s32 kd_mpi_venc_set_2d_custom_coef(k_u32 chn_num, const k_s16 \*coef);
+
+【参数】
+| 参数名称 | 描述 | 输入/输出 |
+|---|---|---|
+| chn_num | 通道号。 取值范围:[0, [K_VENC_2D_MAX_CHN_NUM](#311-venc_max_chn_num))。 | 输入 |
+| coef | 转换系数指针。参考[2D转换系数的计算](#12141-2d转换系数的计算) | 输入 |
+
+【返回值】
+| 返回值 | 描述 |
+|---|---|
+| 0 | 成功。 |
+| 非0 | 失败,返回[错误码](#5-错误码)。 |
+
+【芯片差异】
+无。
+
+【需求】
+
+- 头文件:mpi_venc_api.h,k_type.h,k_module.h,k_sys_comm.h,k_venc_comm.h
+- 库文件:libvenc.a
+
+【注意】
+
+- 内核态有一组默认的转换系数,如需自定义转换系数,可通过本接口配置。
+- 本接口调用应该在设置运算模式之后。
+- 转换系数的说明,详见[2D转换系数的计算](#12141-2d转换系数的计算)
+- 在运算模式为K_VENC_2D_CALC_MODE_BORDER时,不适用转换系数,调用本接口会报错。
+
+【举例】
+无。
+
+【相关主题】
+[kd_mpi_venc_set_2d_mode](#2114-kd_mpi_venc_set_2d_mode)
+
+#### 2.1.21 kd_mpi_venc_get_2d_custom_coef
+
+【描述】
+获取2D运算中的图像格式转换系数。
+
+【语法】
+k_s32 kd_mpi_venc_get_2d_custom_coef(k_u32 chn_num, k_s16 \*coef);
+
+【参数】
+| 参数名称 | 描述 | 输入/输出 |
+|---|---|---|
+| chn_num | 通道号。 取值范围:[0, [K_VENC_2D_MAX_CHN_NUM](#311-venc_max_chn_num))。 | 输入 |
+| coef | 转换系数指针。参考[2D转换系数的计算](#12141-2d转换系数的计算) | 输出 |
+
+【返回值】
+| 返回值 | 描述 |
+|--------|-------------------------------|
+| 0 | 成功。 |
+| 非0 | 失败,返回[错误码](#5-错误码)。 |
+
+【芯片差异】
+无。
+
+【需求】
+
+- 头文件:mpi_venc_api.h,k_type.h,k_module.h,k_sys_comm.h,k_venc_comm.h
+- 库文件:libvenc.a
+
+【注意】
+
+- 本接口调用应该在设置运算模式之后。
+- 在运算模式为K_VENC_2D_CALC_MODE_BORDER时,不适用转换系数,调用本接口会报错。
+
+【举例】
+无。
+
+【相关主题】
+无。
+
+#### 2.1.22 kd_mpi_venc_set_2d_color_gamut
+
+【描述】
+设置2D运算的色域。
+
+【语法】
+k_s32 kd_mpi_venc_set_2d_color_gamut(k_u32 chn_num, const [k_venc_2d_color_gamut](#3114-k_venc_2d_color_gamut) color_gamut);
+
+【参数】
+| 参数名称 | 描述 | 输入/输出 |
+|---|---|---|
+| chn_num | 通道号。 取值范围:[0, [K_VENC_2D_MAX_CHN_NUM](#311-venc_max_chn_num))。 | 输入 |
+| color_gamut | 色域枚举。 | 输入 |
+
+【返回值】
+| 返回值 | 描述 |
+|--------|-------------------------------|
+| 0 | 成功。 |
+| 非0 | 失败,返回[错误码](#5-错误码)。 |
+
+【芯片差异】
+无。
+
+【需求】
+
+- 头文件:mpi_venc_api.h,k_type.h,k_module.h,k_sys_comm.h,k_venc_comm.h
+- 库文件:libvenc.a
+
+【注意】
+
+- 内核态有一组默认的转换系数,如需自定义转换系数,可通过本接口配置。
+- 本接口调用应该在设置运算模式之后。
+- 在运算模式为K_VENC_2D_CALC_MODE_BORDER时,不适用色域,调用本接口会报错。
+
+【举例】
+无。
+
+【相关主题】
+无。
+
+#### 2.1.23 kd_mpi_venc_get_2d_color_gamut
+
+【描述】
+获取2D运算的色域。
+
+【语法】
+k_s32 kd_mpi_venc_get_2d_color_gamut(k_u32 chn_num, [k_venc_2d_color_gamut](#3114-k_venc_2d_color_gamut) \*color_gamut);
+
+【参数】
+| 参数名称 | 描述 | 输入/输出 |
+|---|---|---|
+| chn_num | 通道号。 取值范围:[0, [K_VENC_2D_MAX_CHN_NUM](#311-venc_max_chn_num))。 | 输入 |
+| color_gamut | 色域枚举指针。 | 输出 |
+
+【返回值】
+| 返回值 | 描述 |
+|---|---|
+| 0 | 成功。 |
+| 非0 | 失败,返回[错误码](#5-错误码)。 |
+
+【芯片差异】
+无。
+
+【需求】
+
+- 头文件:mpi_venc_api.h,k_type.h,k_module.h,k_sys_comm.h,k_venc_comm.h
+- 库文件:libvenc.a
+
+【注意】
+
+- 内核态有一组默认的转换系数,如需自定义转换系数,可通过本接口配置。
+- 本接口调用应该在设置运算模式之后。
+- 在运算模式为K_VENC_2D_CALC_MODE_BORDER时,不适用色域,调用本接口会报错。
+
+【举例】
+无。
+
+【相关主题】
+无。
+
+#### 2.1.24 kd_mpi_venc_attach_2d
+
+【描述】
+将2D运算与venc关联。
+
+【语法】
+k_s32 kd_mpi_venc_attach_2d(k_u32 chn_num);
+
+【参数】
+| 参数名称 | 描述 | 输入/输出 |
+|---|---|---|
+| chn_num | 通道号。 取值范围:[0, [K_VENC_2D_MAX_CHN_NUM](#311-venc_max_chn_num))。 | 输入 |
+
+【返回值】
+| 返回值 | 描述 |
+|---|---|
+| 0 | 成功。 |
+| 非0 | 失败,返回[错误码](#5-错误码)。 |
+
+【芯片差异】
+无。
+
+【需求】
+
+- 头文件:mpi_venc_api.h,k_type.h,k_module.h,k_sys_comm.h,k_venc_comm.h
+- 库文件:libvenc.a
+
+【注意】
+
+- 目前绑定只支持编码通道号和2D运算通道号相同的模式。只有前3路编码支持attach 2D操作。
+
+【举例】
+无。
+
+【相关主题】
+无。
+
+#### 2.1.25 kd_mpi_venc_detach_2d
+
+【描述】
+将2D运算与venc分离。
+
+【语法】
+k_s32 kd_mpi_venc_detach_2d(k_u32 chn_num);
+
+【参数】
+| 参数名称 | 描述 | 输入/输出 |
+|---|---|---|
+| chn_num | 2D运算通道号。 取值范围:[0, [K_VENC_2D_MAX_CHN_NUM](#311-venc_max_chn_num))。 | 输入 |
+
+【返回值】
+| 返回值 | 描述 |
+|---|---|
+| 0 | 成功。 |
+| 非0 | 失败,返回[错误码](#5-错误码)。 |
+
+【芯片差异】
+无。
+
+【需求】
+
+- 头文件:mpi_venc_api.h,k_type.h,k_module.h,k_sys_comm.h,k_venc_comm.h
+- 库文件:libvenc.a
+
+【注意】
+
+- 调用该接口,用户需要保证编码通道已停止。
+
+【举例】
+无。
+
+【相关主题】
+[kd_mpi_venc_stop_chn](#214-kd_mpi_venc_stop_chn)
+
+#### 2.1.26 kd_mpi_venc_send_2d_frame
+
+【描述】
+向2D模块发送一帧数据。
+
+【语法】
+| k_s32 kd_mpi_venc_send_2d_frame(k_u32 chn_num, const k_video_frame_info \*frame, k_s32 milli_sec);
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|---|---|---|
+| chn_num | 2D运算通道号,取值范围[0, [K_VENC_2D_MAX_CHN_NUM](#311-venc_max_chn_num))。 | 输入 |
+| frame | 原始图像信息结构指针,参考《K230 系统控制 API参考》。 | 输入 |
+| milli_sec | 发送图像超时时间。 取值范围: [-1,+∞ ) -1:阻塞。 0:非阻塞。 \> 0:超时时间。 | 输入 |
+
+【返回值】
+| 返回值 | 描述 |
+|---|---|
+| 0 | 成功。 |
+| 非0 | 失败,返回[错误码](#5-错误码) |
+
+【芯片差异】
+无。
+
+【需求】
+
+- 头文件:mpi_venc_api.h,k_type.h,k_module.h,k_sys_comm.h,k_venc_comm.h
+- 库文件:libvenc.a
+
+【注意】
+
+- 本接口只在单2D运算的场景使用,在2D运算后再进行编码的场景,需要使用venc发送图形的接口[kd_mpi_venc_send_frame](#218-kd_mpi_venc_send_frame)。
+
+【举例】
+无。
+
+【相关主题】
+[kd_mpi_venc_send_frame](#218-kd_mpi_venc_send_frame)
+
+#### 2.1.27 kd_mpi_venc_get_2d_frame
+
+【描述】
+获取2D运算结果。
+
+【语法】
+k_s32 kd_mpi_venc_get_2d_frame(k_u32 chn_num, k_video_frame_info \*frame, k_s32 milli_sec);
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|---|---|---|
+| chn_num | 2D运算通道号,取值范围[0, [K_VENC_2D_MAX_CHN_NUM](#311-venc_max_chn_num))。 | 输入 |
+| frame | 输出图像信息结构指针,参考《K230 系统控制 API参考》。 | 输入 |
+| milli_sec | 发送图像超时时间。 取值范围: [-1,+∞ ) -1:阻塞。 0:非阻塞。 \> 0:超时时间。 | 输入 |
+
+【返回值】
+| 返回值 | 描述 |
+|--------|-------------------------------|
+| 0 | 成功。 |
+| 非0 | 失败,返回[错误码](#5-错误码)。 |
+
+【芯片差异】
+无。
+
+【需求】
+
+- 头文件:mpi_venc_api.h,k_type.h,k_module.h,k_sys_comm.h,k_venc_comm.h
+- 库文件:libvenc.a
+
+【注意】
+
+- 本接口只在单2D运算的场景使用,在2D运算后再进行编码的场景,获取编码后的码流需要使用[kd_mpi_venc_get_stream](#216-kd_mpi_venc_get_stream)
+
+【举例】
+无。
+
+【相关主题】
+[kd_mpi_venc_get_stream](#216-kd_mpi_venc_get_stream)
+
+#### 2.1.28 kd_mpi_venc_start_2d_chn
+
+【描述】
+开始2D通道接收输入图像。
+
+【语法】
+k_s32 kd_mpi_venc_start_2d_chn(k_u32 chn_num);
+
+【参数】
+| 参数名称 | 描述 | 输入/输出 |
+|---|---|---|
+| chn_num | 2D运算通道号,取值范围[0, [K_VENC_2D_MAX_CHN_NUM](#311-venc_max_chn_num))。 | 输入 |
+
+【返回值】
+| 返回值 | 描述 |
+|--------|-------------------------------|
+| 0 | 成功。 |
+| 非0 | 失败,返回[错误码](#5-错误码)。 |
+
+【芯片差异】
+无。
+
+【需求】
+
+- 头文件:mpi_venc_api.h,k_type.h,k_module.h,k_sys_comm.h,k_venc_comm.h
+
+【注意】
+
+- 本接口只在单2D运算的场景使用,在VENC+2D的场景,需要调用[kd_mpi_venc_start_chn](#213-kd_mpi_venc_start_chn)
+
+【举例】
+无。
+
+【相关主题】
+[kd_mpi_venc_start_chn](#213-kd_mpi_venc_start_chn)
+
+#### 2.1.29 kd_mpi_venc_stop_2d_chn
+
+【描述】
+停止2D通道接收输入图像。
+
+【语法】
+k_s32 kd_mpi_venc_stop_2d_chn(k_u32 chn_num);
+
+【参数】
+| 参数名称 | 描述 | 输入/输出 |
+|---|---|---|
+| chn_num | 2D运算通道号,取值范围[0, [K_VENC_2D_MAX_CHN_NUM](#311-venc_max_chn_num))。 | 输入 |
+
+【返回值】
+| 返回值 | 描述 |
+|--------|-------------------------------|
+| 0 | 成功。 |
+| 非0 | 失败,返回[错误码](#5-错误码)。 |
+
+【芯片差异】
+无。
+
+【需求】
+
+- 头文件:mpi_venc_api.h,k_type.h,k_module.h,k_sys_comm.h,k_venc_comm.h
+- 库文件:libvenc.a
+
+【注意】
+无。
+
+【举例】
+无。
+
+【相关主题】
+无。
+
+#### 2.1.30 kd_mpi_venc_request_idr
+
+【描述】
+请求IDR帧,在调用之后立即产生一个IDR帧。
+
+【语法】
+k_s32 kd_mpi_venc_request_idr(k_u32 chn_num);
+
+【参数】
+| 参数名称 | 描述 | 输入/输出 |
+|---|---|---|
+| chn_num | 通道号。 取值范围:[0, [K_VENC_2D_MAX_CHN_NUM](#311-venc_max_chn_num))。 | 输入 |
+
+【返回值】
+| 返回值 | 描述 |
+|--------|-------------------------------|
+| 0 | 成功。 |
+| 非0 | 失败,返回[错误码](#5-错误码)。 |
+
+【芯片差异】
+无。
+
+【需求】
+
+- 头文件:mpi_venc_api.h,k_type.h,k_module.h,k_sys_comm.h,k_venc_comm.h
+- 库文件:libvenc.a
+
+【注意】
+无。
+
+【举例】
+无。
+
+【相关主题】
+无。
+
+#### 2.1.31 kd_mpi_venc_set_h265_sao
+
+【描述】
+设置H.265通道的Sao属性。
+
+【语法】
+k_s32 kd_mpi_venc_set_h265_sao(k_u32 chn_num, const [k_venc_h265_sao](#3127-k_venc_h265_sao) *h265_sao);
+
+【参数】
+| 参数名称 | 描述 | 输入/输出 |
+|---|---|---|
+| chn_num | 通道号。 取值范围:[0, [K_VENC_2D_MAX_CHN_NUM](#311-venc_max_chn_num))。 | 输入 |
+| h265_sao | H.265协议编码通道的Sao配置。 | 输入 |
+
+【返回值】
+| 返回值 | 描述 |
+|--------|-------------------------------|
+| 0 | 成功。 |
+| 非0 | 失败,返回[错误码](#5-错误码)。 |
+
+【芯片差异】
+无。
+
+【需求】
+
+- 头文件:mpi_venc_api.h,k_type.h,k_module.h,k_sys_comm.h,k_venc_comm.h
+- 库文件:libvenc.a
+
+【注意】
+
+- 本接口需要在创建编码通道之后,开始编码通道之前调用。
+
+【举例】
+无。
+
+【相关主题】
+无。
+
+#### 2.1.32 kd_mpi_venc_get_h265_sao
+
+【描述】
+获取H.265通道的Sao属性。
+
+【语法】
+k_s32 kd_mpi_venc_get_h265_sao(k_u32 chn_num, [k_venc_h265_sao](#3127-k_venc_h265_sao) *h265_sao);
+
+【参数】
+| 参数名称 | 描述 | 输入/输出 |
+|---|---|---|
+| chn_num | 通道号。 取值范围:[0, [K_VENC_2D_MAX_CHN_NUM](#311-venc_max_chn_num))。 | 输入 |
+| h265_sao | H.265协议编码通道的Sao配置。 | 输出 |
+
+【返回值】
+| 返回值 | 描述 |
+|--------|-------------------------------|
+| 0 | 成功。 |
+| 非0 | 失败,返回[错误码](#5-错误码)。 |
+
+【芯片差异】
+无。
+
+【需求】
+
+- 头文件:mpi_venc_api.h,k_type.h,k_module.h,k_sys_comm.h,k_venc_comm.h
+- 库文件:libvenc.a
+
+【注意】
+无。
+
+【举例】
+无。
+
+【相关主题】
+无。
+
+#### 2.1.33 kd_mpi_venc_set_dblk
+
+【描述】
+设置H.264/H.265协议编码通道的Deblocking使能。
+
+【语法】
+k_s32 kd_mpi_venc_set_dblk(k_u32 chn_num, const k_bool dblk_en);
+
+【参数】
+| 参数名称 | 描述 | 输入/输出 |
+|---|---|---|
+| chn_num | 通道号。 取值范围:[0, [K_VENC_2D_MAX_CHN_NUM](#311-venc_max_chn_num))。 | 输入 |
+| dblk_en | 是否使能deblocking。K_TRUE:使能。K_FALSE:不使能。默认使能。 | 输入 |
+
+【返回值】
+| 返回值 | 描述 |
+|--------|-------------------------------|
+| 0 | 成功。 |
+| 非0 | 失败,返回[错误码](#5-错误码)。 |
+
+【芯片差异】
+无。
+
+【需求】
+
+- 头文件:mpi_venc_api.h,k_type.h,k_module.h,k_sys_comm.h,k_venc_comm.h
+- 库文件:libvenc.a
+
+【注意】
+
+- 本接口需要在创建编码通道之后,开始编码通道之前调用。
+
+【举例】
+无。
+
+【相关主题】
+无。
+
+#### 2.1.34 kd_mpi_venc_get_dblk
+
+【描述】
+获取H.264/H.265协议编码通道的Deblocking状态。
+
+【语法】
+k_s32 kd_mpi_venc_get_dblk(k_u32 chn_num, k_bool *dblk_en);
+
+【参数】
+| 参数名称 | 描述 | 输入/输出 |
+|---|---|---|
+| chn_num | 通道号。 取值范围:[0, [K_VENC_2D_MAX_CHN_NUM](#311-venc_max_chn_num))。 | 输入 |
+| dblk_en | 是否使能deblocking。K_TRUE:使能。K_FALSE:不使能。默认使能。 | 输出 |
+
+【返回值】
+| 返回值 | 描述 |
+|--------|-------------------------------|
+| 0 | 成功。 |
+| 非0 | 失败,返回[错误码](#5-错误码)。 |
+
+【芯片差异】
+无。
+
+【需求】
+
+- 头文件:mpi_venc_api.h,k_type.h,k_module.h,k_sys_comm.h,k_venc_comm.h
+- 库文件:libvenc.a
+
+【注意】
+无。
+
+【举例】
+无。
+
+【相关主题】
+无。
+
+#### 2.1.35 kd_mpi_venc_set_roi_attr
+
+【描述】
+设置H.264/H.265通道的ROI属性。
+
+【语法】
+k_s32 kd_mpi_venc_set_roi_attr(k_u32 chn_num, const [k_venc_roi_attr](#3129-k_venc_roi_attr) *roi_attr);
+
+【参数】
+| 参数名称 | 描述 | 输入/输出 |
+|---|---|---|
+| chn_num | 通道号。 取值范围:[0, [K_VENC_2D_MAX_CHN_NUM](#311-venc_max_chn_num))。 | 输入 |
+| dblk_en | 是否使能deblocking。K_TRUE:使能。K_FALSE:不使能。默认使能。 | 输入 |
+
+【返回值】
+| 返回值 | 描述 |
+|--------|-------------------------------|
+| 0 | 成功。 |
+| 非0 | 失败,返回[错误码](#5-错误码)。 |
+
+【芯片差异】
+无。
+
+【需求】
+
+- 头文件:mpi_venc_api.h,k_type.h,k_module.h,k_sys_comm.h,k_venc_comm.h
+- 库文件:libvenc.a
+
+【注意】
+
+- 本接口需要在创建编码通道之后,开始编码通道之前调用。
+
+【举例】
+无。
+
+【相关主题】
+无。
+
+#### 2.1.36 kd_mpi_venc_get_roi_attr
+
+【描述】
+获取H.264/H.265通道的ROI属性。
+
+【语法】
+k_s32 kd_mpi_venc_get_roi_attr(k_u32 chn_num, [k_venc_roi_attr](#3129-k_venc_roi_attr) *roi_attr);
+
+【参数】
+| 参数名称 | 描述 | 输入/输出 |
+|---|---|---|
+| chn_num | 通道号。 取值范围:[0, [K_VENC_2D_MAX_CHN_NUM](#311-venc_max_chn_num))。 | 输入 |
+| dblk_en | 是否使能deblocking。K_TRUE:使能。K_FALSE:不使能。默认使能。 | 输出 |
+
+【返回值】
+| 返回值 | 描述 |
+|--------|-------------------------------|
+| 0 | 成功。 |
+| 非0 | 失败,返回[错误码](#5-错误码)。 |
+
+【芯片差异】
+无。
+
+【需求】
+
+- 头文件:mpi_venc_api.h,k_type.h,k_module.h,k_sys_comm.h,k_venc_comm.h
+- 库文件:libvenc.a
+
+【注意】
+无。
+
+【举例】
+无。
+
+【相关主题】
+无。
+
+#### 2.1.37 kd_mpi_venc_set_h264_entropy
+
+【描述】
+设置H.264协议编码通道的熵编码模式。
+
+【语法】
+k_s32 kd_mpi_venc_set_h264_entropy(k_u32 chn_num, const [k_venc_h264_entropy](#3130-k_venc_h264_entropy) *h264_entropy);
+
+【参数】
+| 参数名称 | 描述 | 输入/输出 |
+|---|---|---|
+| chn_num | 通道号。 取值范围:[0, [K_VENC_2D_MAX_CHN_NUM](#311-venc_max_chn_num))。 | 输入 |
+| h264_entropy | H.264协议编码通道的熵编码模式。 | 输入 |
+
+【返回值】
+| 返回值 | 描述 |
+|--------|-------------------------------|
+| 0 | 成功。 |
+| 非0 | 失败,返回[错误码](#5-错误码)。 |
+
+【芯片差异】
+无。
+
+【需求】
+
+- 头文件:mpi_venc_api.h,k_type.h,k_module.h,k_sys_comm.h,k_venc_comm.h
+- 库文件:libvenc.a
+
+【注意】
+
+- 本接口需要在创建编码通道之后,开始编码通道之前调用。
+
+【举例】
+无。
+
+【相关主题】
+无。
+
+#### 2.1.38 kd_mpi_venc_get_h264_entropy
+
+【描述】
+获取H.264协议编码通道的熵编码模式。
+
+【语法】
+k_s32 kd_mpi_venc_get_h264_entropy(k_u32 chn_num, [k_venc_h264_entropy](#3130-k_venc_h264_entropy) *h264_entropy);
+
+【参数】
+| 参数名称 | 描述 | 输入/输出 |
+|---|---|---|
+| chn_num | 通道号。 取值范围:[0, [K_VENC_2D_MAX_CHN_NUM](#311-venc_max_chn_num))。 | 输入 |
+| h264_entropy | H.264协议编码通道的熵编码模式。 | 输出 |
+
+【返回值】
+| 返回值 | 描述 |
+|--------|-------------------------------|
+| 0 | 成功。 |
+| 非0 | 失败,返回[错误码](#5-错误码)。 |
+
+【芯片差异】
+无。
+
+【需求】
+
+- 头文件:mpi_venc_api.h,k_type.h,k_module.h,k_sys_comm.h,k_venc_comm.h
+- 库文件:libvenc.a
+
+【注意】
+无。
+
+【举例】
+无。
+
+【相关主题】
+无。
+
+#### 2.1.39 kd_mpi_venc_set_h265_entropy
+
+【描述】
+设置H.265协议编码通道的熵编码模式。
+
+【语法】
+k_s32 kd_mpi_venc_set_h265_entropy(k_u32 chn_num, const [k_venc_h265_entropy](#3131-k_venc_h265_entropy) *h265_entropy);
+
+【参数】
+| 参数名称 | 描述 | 输入/输出 |
+|---|---|---|
+| chn_num | 通道号。 取值范围:[0, [K_VENC_2D_MAX_CHN_NUM](#311-venc_max_chn_num))。 | 输入 |
+| h265_entropy | H.265协议编码通道的熵编码模式。 | 输入 |
+
+【返回值】
+| 返回值 | 描述 |
+|--------|-------------------------------|
+| 0 | 成功。 |
+| 非0 | 失败,返回[错误码](#5-错误码)。 |
+
+【芯片差异】
+无。
+
+【需求】
+
+- 头文件:mpi_venc_api.h,k_type.h,k_module.h,k_sys_comm.h,k_venc_comm.h
+- 库文件:libvenc.a
+
+【注意】
+
+- 本接口需要在创建编码通道之后,开始编码通道之前调用。
+
+【举例】
+无。
+
+【相关主题】
+无。
+
+#### 2.1.40 kd_mpi_venc_get_h265_entropy
+
+【描述】
+获取H.265协议编码通道的熵编码模式。
+
+【语法】
+k_s32 kd_mpi_venc_get_h265_entropy(k_u32 chn_num, [k_venc_h265_entropy](#3131-k_venc_h265_entropy) *h265_entropy);
+
+【参数】
+| 参数名称 | 描述 | 输入/输出 |
+|---|---|---|
+| chn_num | 通道号。 取值范围:[0, [K_VENC_2D_MAX_CHN_NUM](#311-venc_max_chn_num))。 | 输入 |
+| h265_entropy | H.265协议编码通道的熵编码模式。 | 输出 |
+
+【返回值】
+| 返回值 | 描述 |
+|--------|-------------------------------|
+| 0 | 成功。 |
+| 非0 | 失败,返回[错误码](#5-错误码)。 |
+
+【芯片差异】
+无。
+
+【需求】
+
+- 头文件:mpi_venc_api.h,k_type.h,k_module.h,k_sys_comm.h,k_venc_comm.h
+- 库文件:libvenc.a
+
+【注意】
+无。
+
+【举例】
+无。
+
+【相关主题】
+无。
+
+### 2.2 视频解码
+
+该功能模块提供以下API:
+
+- [kd_mpi_vdec_create_chn](#221-kd_mpi_vdec_create_chn):创建视频解码通道。
+- [kd_mpi_vdec_destroy_chn](#222-kd_mpi_vdec_destroy_chn):销毁视频解码通道。
+- [kd_mpi_vdec_start_chn](#223-kd_mpi_vdec_start_chn):开启视频解码通道。
+- [kd_mpi_vdec_stop_chn](#224-kd_mpi_vdec_stop_chn):停止视频解码通道。
+- [kd_mpi_vdec_query_status](#225-kd_mpi_vdec_query_status):解码器停止接收用户发送的码流。
+- [kd_mpi_vdec_send_stream](#226-kd_mpi_vdec_send_stream):向视频解码通道发送码流数据。
+- [kd_mpi_vdec_get_frame](#227-kd_mpi_vdec_get_frame):获取视频解码通道的解码图像。
+- [kd_mpi_vdec_release_frame](#228-kd_mpi_vdec_release_frame):获取视频解码通道的解码图像。
+- [kd_mpi_vdec_set_downscale](#229-kd_mpi_vdec_set_downscale):设置解码输出缩小的图像(指定长宽或按比例)。
+- [kd_mpi_vdec_set_rotation](#2210-kd_mpi_vdec_set_rotation):设置解码旋转角度。
+
+#### 2.2.1 kd_mpi_vdec_create_chn
+
+【描述】
+创建视频解码通道。
+
+【语法】
+k_s32 kd_mpi_vdec_create_chn(k_u32 chn_num, const [k_vdec_chn_attr](#323-k_vdec_chn_attr) \*attr);
+
+【参数】
+| 参数名称 | 描述 | 输入/输出 |
+|---|---|---|
+| chn_num | 编码通道信息。 取值范围:[0, [K_VDEC_MAX_CHN_NUM](#321-k_vdec_max_chn_num))。 | 输入 |
+| attr | 解码通道属性指针。 | 输入 |
+
+【返回值】
+| 返回值 | 描述 |
+|--------|-------------------------------|
+| 0 | 成功。 |
+| 非0 | 失败,参见[错误码](#5-错误码)。 |
+
+【芯片差异】
+无。
+
+【需求】
+
+- 头文件:mpi_vdec_api.h,k_type.h,k_module.h,k_sys_comm.h,k_vdec_comm.h
+- 库文件:libvdec.a
+
+【注意】
+无。
+
+【举例】
+无。
+
+【相关主题】
+无。
+
+#### 2.2.2 kd_mpi_vdec_destroy_chn
+
+【描述】
+销毁视频解码通道。
+
+【语法】
+k_s32 kd_mpi_vdec_destroy_chn(k_u32 chn_num);
+
+【参数】
+| 参数名称 | 描述 | 输入/输出 |
+|---|---|---|
+| chn_num | 编码通道信息。 取值范围:[0, [K_VDEC_MAX_CHN_NUM](#321-k_vdec_max_chn_num))。 | 输入 |
+
+【返回值】
+| 返回值 | 描述 |
+|--------|-------------------------------|
+| 0 | 成功。 |
+| 非0 | 失败,参见[错误码](#5-错误码)。 |
+
+【芯片差异】
+无。
+
+【需求】
+
+- 头文件:mpi_vdec_api.h,k_type.h,k_module.h,k_sys_comm.h,k_vdec_comm.h
+- 库文件:libvdec.a
+
+【注意】
+无。
+
+【举例】
+无。
+
+【相关主题】
+无。
+
+#### 2.2.3 kd_mpi_vdec_start_chn
+
+【描述】
+开启视频解码通道。
+
+【语法】
+k_s32 kd_mpi_vdec_start_chn(k_u32 chn_num);
+
+【参数】
+| 参数名称 | 描述 | 输入/输出 |
+|---|---|---|
+| chn_num | 编码通道信息。 取值范围:[0, [K_VDEC_MAX_CHN_NUM](#321-k_vdec_max_chn_num))。 | 输入 |
+
+【返回值】
+| 返回值 | 描述 |
+|--------|-------------------------------|
+| 0 | 成功。 |
+| 非0 | 失败,参见[错误码](#5-错误码)。 |
+
+【芯片差异】
+无。
+
+【需求】
+
+- 头文件:mpi_vdec_api.h,k_type.h,k_module.h,k_sys_comm.h,k_vdec_comm.h
+- 库文件:libvdec.a
+
+【注意】
+无。
+
+【举例】
+无。
+
+【相关主题】
+无。
+
+#### 2.2.4 kd_mpi_vdec_stop_chn
+
+【描述】
+停止视频解码通道。
+
+【语法】
+k_s32 kd_mpi_vdec_stop_chn(k_u32 chn_num);
+
+【参数】
+| 参数名称 | 描述 | 输入/输出 |
+|---|---|---|
+| chn_num | 编码通道信息。 取值范围:[0, [K_VDEC_MAX_CHN_NUM](#321-k_vdec_max_chn_num))。 | 输入 |
+
+【返回值】
+| 返回值 | 描述 |
+|--------|-------------------------------|
+| 0 | 成功。 |
+| 非0 | 失败,参见[错误码](#5-错误码)。 |
+
+【芯片差异】
+无。
+
+【需求】
+
+- 头文件:mpi_vdec_api.h,k_type.h,k_module.h,k_sys_comm.h,k_vdec_comm.h
+- 库文件:libvdec.a
+
+【注意】
+无。
+
+【举例】
+无。
+
+【相关主题】
+无。
+
+#### 2.2.5 kd_mpi_vdec_query_status
+
+【描述】
+查询解码通道状态。
+
+【语法】
+k_s32 kd_mpi_vdec_query_status(k_u32 chn_num, [k_vdec_chn_status](#3114-(#324-k_vdec_chn_status) \*status);
+
+【参数】
+| 参数名称 | 描述 | 输入/输出 |
+|---|---|---|
+| chn_num | 编码通道信息。 取值范围:[0, [K_VDEC_MAX_CHN_NUM](#321-k_vdec_max_chn_num))。 | 输入 |
+| status | 视频解码通道状态结构体指针。 | 输出 |
+
+【返回值】
+| 返回值 | 描述 |
+|--------|-------------------------------|
+| 0 | 成功。 |
+| 非0 | 失败,参见[错误码](#5-错误码)。 |
+
+【芯片差异】
+无。
+
+【需求】
+
+- 头文件:mpi_vdec_api.h,k_type.h,k_module.h,k_sys_comm.h,k_vdec_comm.h
+- 库文件:libvdec.a
+
+【注意】
+无。
+
+【举例】
+无。
+
+【相关主题】
+无。
+
+#### 2.2.6 kd_mpi_vdec_send_stream
+
+【描述】
+向视频解码通道发送码流数据。
+
+【语法】
+k_s32 kd_mpi_vdec_send_stream(k_u32 chn_num, const [k_vdec_stream](#326-k_vdec_stream) \*stream, k_s32 milli_sec);
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|---|---|---|
+| chn_num | 编码通道信息。 取值范围:[0, [K_VDEC_MAX_CHN_NUM](#321-k_vdec_max_chn_num))。 | 输入 |
+| stream | 解码码流数据指针。 | 输入 |
+| milli_sec | 送码流方式标志。 取值范围: -1:阻塞。 0:非阻塞。 正值:超时时间,没有上限值,以ms为单位。 | 输入 |
+
+【返回值】
+| 返回值 | 描述 |
+|--------|-------------------------------|
+| 0 | 成功。 |
+| 非0 | 失败,参见[错误码](#5-错误码)。 |
+
+【芯片差异】
+无。
+
+【需求】
+
+- 头文件:mpi_vdec_api.h,k_type.h,k_module.h,k_sys_comm.h,k_vdec_comm.h
+- 库文件:libvdec.a
+
+【注意】
+无。
+
+【举例】
+无。
+
+【相关主题】
+无。
+
+#### 2.2.7 kd_mpi_vdec_get_frame
+
+【描述】
+获取视频解码通道的解码图像。
+
+【语法】
+k_s32 kd_mpi_vdec_get_frame(k_u32 chn_num, k_video_frame_info \*frame_info, [k_vdec_supplement_info](#327-k_vdec_supplement_info) \*supplement, k_s32 milli_sec);
+
+【参数】
+| 参数名称 | 描述 | 输入/输出 |
+|---|---|---|
+| chn | 编码通道信息。 取值范围:[0, [K_VDEC_MAX_CHN_NUM](#321-k_vdec_max_chn_num))。 输入 |
+| frame_info | 获取的解码图像信息,参考《K230 系统控制 API参考》。| 输出 |
+| supplement | 获取的解码图像补充信息。 | 输出 |
+| milli_sec | 送码流方式标志。 取值范围: -1:阻塞。 0:非阻塞。 正值:超时时间,没有上限值,以ms为单位 动态属性。 | 输入 |
+
+【返回值】
+| 返回值 | 描述 |
+|--------|-------------------------------|
+| 0 | 成功。 |
+| 非0 | 失败,参见[错误码](#5-错误码)。 |
+
+【芯片差异】
+无。
+
+【需求】
+
+- 头文件:mpi_vdec_api.h,k_type.h,k_module.h,k_sys_comm.h,k_vdec_comm.h
+- 库文件:libvdec.a
+
+【注意】
+无。
+
+【举例】
+无。
+
+【相关主题】
+无。
+
+#### 2.2.8 kd_mpi_vdec_release_frame
+
+【描述】
+获取视频解码通道的解码图像。
+
+【语法】
+k_s32 kd_mpi_vdec_release_frame(k_u32 chn_num, const k_video_frame_info \*frame_info);
+
+【参数】
+| 参数名称 | 描述 | 输入/输出 |
+|---|---|---|
+| chn | 编码通道信息。 取值范围:[0, [K_VDEC_MAX_CHN_NUM](#321-k_vdec_max_chn_num))。 | 输入 |
+| frame_info | 解码后的图像信息指针,由[kd_mpi_vdec_get_frame](#227-kd_mpi_vdec_get_frame)接口获取,参考《K230 系统控制 API参考》。 | 输入 |
+
+【返回值】
+| 返回值 | 描述 |
+|--------|-------------------------------|
+| 0 | 成功。 |
+| 非0 | 失败,参见[错误码](#5-错误码)。 |
+
+【芯片差异】
+无。
+
+【需求】
+
+- 头文件:mpi_vdec_api.h,k_type.h,k_module.h,k_sys_comm.h,k_vdec_comm.h
+- 库文件:libvdec.a
+
+【注意】
+无。
+
+【举例】
+无。
+
+【相关主题】
+[kd_mpi_vdec_get_frame](#227-kd_mpi_vdec_get_frame)
+
+#### 2.2.9 kd_mpi_vdec_set_downscale
+
+【描述】
+设置解码输出缩小的图像(指定长宽或按比例)。
+
+【语法】
+k_s32 kd_mpi_vdec_set_downscale(k_u32 chn_num, const [k_vdec_downscale](#3211-k_vdec_downscale) *downscale)
+
+【参数】
+| 参数名称 | 描述 | 输入/输出 |
+|---|---|---|
+| chn_num | 编码通道信息。 取值范围:[0, [K_VDEC_MAX_CHN_NUM](#321-k_vdec_max_chn_num))。 | 输入 |
+| downscale | 缩小尺寸参数结构体指针。 | 输入 |
+
+【返回值】
+| 返回值 | 描述 |
+|--------|-------------------------------|
+| 0 | 成功。 |
+| 非0 | 失败,参见[错误码](#5-错误码)。 |
+
+【芯片差异】
+无。
+
+【需求】
+
+- 头文件:mpi_vdec_api.h,k_type.h,k_module.h,k_sys_comm.h,k_vdec_comm.h
+- 库文件:libvdec.a
+
+【注意】
+在kd_mpi_vdec_create_chn和kd_mpi_vdec_start_chn之间设置。
+
+【举例】
+无。
+
+【相关主题】
+无。
+
+#### 2.2.10 kd_mpi_vdec_set_rotation
+
+【描述】
+设置解码旋转角度。
+
+【语法】
+k_s32 kd_mpi_vdec_set_rotation(k_u32 chn_num, const [k_rotation](#3112-k_rotation) rotation)
+
+【参数】
+| 参数名称 | 描述 | 输入/输出 |
+|---|---|---|
+| chn_num | 编码通道信息。 取值范围:[0, [K_VDEC_MAX_CHN_NUM](#321-k_vdec_max_chn_num))。 | 输入 |
+| rotation | 旋转角度枚举。 | 输入 |
+
+【返回值】
+| 返回值 | 描述 |
+|--------|-------------------------------|
+| 0 | 成功。 |
+| 非0 | 失败,参见[错误码](#5-错误码)。 |
+
+【芯片差异】
+无。
+
+【需求】
+
+- 头文件:mpi_vdec_api.h,k_type.h,k_module.h,k_sys_comm.h,k_vdec_comm.h
+- 库文件:libvdec.a
+
+【注意】
+在kd_mpi_vdec_create_chn和kd_mpi_vdec_start_chn之间设置。
+
+【举例】
+无。
+
+【相关主题】
+无。
+
+## 3. 数据类型
+
+### 3.1 视频编码
+
+该功能模块的相关数据类型定义如下:
+
+- [VENC_MAX_CHN_NUM](#311-venc_max_chn_num):定义最大通道个数。
+- [K_VENC_MAX_2D_OSD_REGION_NUM](#312-k_venc_max_2d_osd_region_num):定义2D运算叠加OSD的最大Region个数。
+- [K_VENC_MAX_2D_BORDER_NUM](#313-k_venc_max_2d_border_num):定义2D运算画框的最大个数。
+- [K_VENC_2D_COFF_NUM](#314-k_venc_2d_coff_num):定义2D运算CSC转换系数的个数。
+- [K_VENC_2D_MAX_CHN_NUM](#315-k_venc_2d_max_chn_num):定义2D运算channel个数。
+- [k_venc_rc_mode](#316-k_venc_rc_mode):定义编码通道码率控制器模式。
+- [k_venc_pack_type](#317-k_venc_pack_type):定义JPEG码流PACK类型枚举。
+- [k_venc_2d_calc_mode](#318-k_venc_2d_calc_mode):定义2d运算的计算模式枚举。
+- [k_venc_2d_src_dst_fmt](#319-k_venc_2d_src_dst_fmt):定义2D运算的输入输出数据格式枚举。
+- [k_venc_2d_osd_fmt](#3110-k_venc_2d_osd_fmt):定义2D运算的OSD层数据格式枚举。
+- [k_venc_2d_add_order](#3111-k_venc_2d_add_order):定义2D运算的OSD叠加枚举。
+- [k_rotation](#3112-k_rotation):定义编码旋转角度枚举。
+- [k_venc_mirror](#3113-k_venc_mirror):定义编码翻转方式枚举。
+- [k_venc_2d_color_gamut](#3114-k_venc_2d_color_gamut):定义2D运算的色域枚举。
+- [k_venc_chn_attr](#3115-k_venc_chn_attr):定义编码通道属性结构体。
+- [k_venc_attr](#3116-k_venc_attr):定义编码器属性结构体。
+- [k_venc_rc_attr](#3117-k_venc_rc_attr):定义编码通道码率控制器属性结构体。
+- [k_venc_cbr](#3118-k_venc_cbr):定义H.264/H.265编码通道CBR属性结构体。
+- [k_venc_vbr](#3119-k_venc_vbr):定义H.264/H.265编码通道VBR属性结构体。
+- [k_venc_fixqp](#3120-k_venc_fixqp):定义H.264/H.265编码通道Fixqp属性结构体。
+- [k_venc_mjpeg_fixqp](#3121-k_venc_mjpeg_fixqp):定义MJPEG编码通道Fixqp属性结构体。
+- [k_venc_chn_status](#3122-k_venc_chn_status):定义编码通道的状态结构体。
+- [k_venc_stream](#3123-k_venc_stream):定义帧码流类型结构体。
+- [k_venc_pack](#3124-k_venc_pack):定义帧码流包结构体。
+- [k_venc_2d_osd_attr](#3125-k_venc_2d_osd_attr):2D叠加属性结构体。
+- [k_venc_2d_border_attr](#3126-k_venc_2d_border_attr):2D画框结构体。
+- [k_venc_h265_sao](#3127-k_venc_h265_sao):定义H.265协议编码通道Sao的结构体。
+- [k_venc_rect](#3128-k_venc_rect):定义矩形区域信息结构体。
+- [k_venc_roi_attr](#3129-k_venc_roi_attr):定义编码感兴趣区域信息。
+- [k_venc_h264_entropy](#3130-k_venc_h264_entropy):定义H.264协议编码通道熵编码结构体。
+- [k_venc_h265_entropy](#3131-k_venc_h265_entropy):定义H.265协议编码通道熵编码结构体。
+
+#### 3.1.1 VENC_MAX_CHN_NUM
+
+【说明】
+定义最大通道个数。
+
+【定义】
+
+\#define VENC_MAX_CHN_NUM 4
+
+【注意事项】
+无。
+
+【相关数据类型及接口】
+无。
+
+#### 3.1.2 K_VENC_MAX_2D_OSD_REGION_NUM
+
+【说明】
+定义2D运算叠加OSD的最大Region个数。
+
+【定义】
+
+\#define K_VENC_MAX_2D_OSD_REGION_NUM 8
+
+【注意事项】
+无。
+
+【相关数据类型及接口】
+无。
+
+#### 3.1.3 K_VENC_MAX_2D_BORDER_NUM
+
+【说明】
+定义2D运算画框的最大个数。
+
+【定义】
+
+\#define K_VENC_MAX_2D_BORDER_NUM 32
+
+【注意事项】
+无。
+
+【相关数据类型及接口】
+无。
+
+#### 3.1.4 K_VENC_2D_COFF_NUM
+
+【说明】
+定义2D运算CSC转换系数的个数。
+
+【定义】
+
+\#define K_VENC_2D_COFF_NUM 12
+
+【注意事项】
+无。
+
+【相关数据类型及接口】
+无。
+
+#### 3.1.5 K_VENC_2D_MAX_CHN_NUM
+
+【说明】
+定义2D运算channel个数。
+
+【定义】
+
+\#define K_VENC_2D_MAX_CHN_NUM 3
+
+【注意事项】
+无。
+
+【相关数据类型及接口】
+无。
+
+#### 3.1.6 k_venc_rc_mode
+
+【说明】
+定义编码通道码率控制器模式。
+
+【定义】
+typedef enum {
+ K_VENC_RC_MODE_CBR = 1,
+ K_VENC_RC_MODE_VBR,
+ K_VENC_RC_MODE_FIXQP,
+ K_VENC_RC_MODE_MJPEG_FIXQP,
+ K_VENC_RC_MODE_BUTT,
+} k_venc_rc_mode;
+
+【成员】
+| 成员名称 | 描述 |
+|---|---|
+| K_VENC_RC_MODE_CBR | H.264/H.265 CBR模式。 |
+| K_VENC_RC_MODE_VBR | H.264/H.265 VBR模式。 |
+| K_VENC_RC_MODE_FIXQP | H.264/H.265 Fixqp模式。 |
+| K_VENC_RC_MODE_MJPEG_FIXQP | MJPEG Fixqp模式。 |
+
+【注意事项】
+无。
+
+【相关数据类型及接口】
+无。
+
+#### 3.1.7 k_venc_pack_type
+
+【说明】
+定义JPEG码流PACK类型枚举。
+
+【定义】
+typedef enum {
+ K_VENC_P_FRAME = 1,
+ K_VENC_I_FRAME = 2,
+ K_VENC_HEADER = 3,
+ K_VENC_BUTT
+} k_venc_pack_type;
+
+【成员】
+| 成员名称 | 描述 |
+|----------------|----------|
+| K_VENC_P_FRAME | I帧。 |
+| K_VENC_I_FRAME | P帧。 |
+| K_VENC_HEADER | Header。 |
+
+【注意事项】
+无。
+
+【相关数据类型及接口】
+无。
+
+#### 3.1.8 k_venc_2d_calc_mode
+
+【说明】
+定义2d运算的计算模式枚举。
+
+【定义】
+typedef enum {
+ K_VENC_2D_CALC_MODE_CSC = 0,
+ K_VENC_2D_CALC_MODE_OSD,
+ K_VENC_2D_CALC_MODE_BORDER,
+ K_VENC_2D_CALC_MODE_OSD_BORDER,
+ K_VENC_2D_CALC_MODE_BUTT
+} k_venc_2d_calc_mode;
+
+【成员】
+
+| 成员名称 | 描述 |
+|--------------------------------|--------------------------|
+| K_VENC_2D_CALC_MODE_CSC | 图片格式转换。 |
+| K_VENC_2D_CALC_MODE_OSD | 图片叠加。 |
+| K_VENC_2D_CALC_MODE_BORDER | 画框。 |
+| K_VENC_2D_CALC_MODE_OSD_BORDER | 先进行图片叠加,再画框。 |
+
+【注意事项】
+
+- 目前不支持K_VENC_2D_CALC_MODE_CSC模式。
+
+【相关数据类型及接口】
+无。
+
+#### 3.1.9 k_venc_2d_src_dst_fmt
+
+【说明】
+定义2D运算的输入输出数据格式枚举。
+
+【定义】
+typedef enum {
+ K_VENC_2D_SRC_DST_FMT_YUV420_NV12= 0,
+ K_VENC_2D_SRC_DST_FMT_YUV420_NV21,
+ K_VENC_2D_SRC_DST_FMT_YUV420_I420,
+ K_VENC_2D_SRC_DST_FMT_ARGB8888 = 4,
+ K_VENC_2D_SRC_DST_FMT_ARGB4444,
+ K_VENC_2D_SRC_DST_FMT_ARGB1555,
+ K_VENC_2D_SRC_DST_FMT_XRGB8888,
+ K_VENC_2D_SRC_DST_FMT_XRGB4444,
+ K_VENC_2D_SRC_DST_FMT_XRGB1555,
+ K_VENC_2D_SRC_DST_FMT_BGRA8888,
+ K_VENC_2D_SRC_DST_FMT_BGRA4444,
+ K_VENC_2D_SRC_DST_FMT_BGRA5551,
+ K_VENC_2D_SRC_DST_FMT_BGRX8888,
+ K_VENC_2D_SRC_DST_FMT_BGRX4444,
+ K_VENC_2D_SRC_DST_FMT_BGRX5551,
+ K_VENC_2D_SRC_DST_FMT_RGB888,
+ K_VENC_2D_SRC_DST_FMT_BGR888,
+ K_VENC_2D_SRC_DST_FMT_RGB565,
+ K_VENC_2D_SRC_DST_FMT_BGR565,
+ K_VENC_2D_SRC_DST_FMT_SEPERATE_RGB,
+ K_VENC_2D_SRC_DST_FMT_BUTT
+} k_venc_2d_src_dst_fmt;
+
+【注意事项】
+无。
+
+【相关数据类型及接口】
+无。
+
+#### 3.1.10 k_venc_2d_osd_fmt
+
+【说明】
+定义2D运算的OSD层数据格式枚举。
+
+【定义】
+typedef enum {
+ K_VENC_2D_OSD_FMT_ARGB8888= 0,
+ K_VENC_2D_OSD_FMT_ARGB4444,
+ K_VENC_2D_OSD_FMT_ARGB1555,
+ K_VENC_2D_OSD_FMT_XRGB8888,
+ K_VENC_2D_OSD_FMT_XRGB4444,
+ K_VENC_2D_OSD_FMT_XRGB1555,
+ K_VENC_2D_OSD_FMT_BGRA8888,
+ K_VENC_2D_OSD_FMT_BGRA4444,
+ K_VENC_2D_OSD_FMT_BGRA5551,
+ K_VENC_2D_OSD_FMT_BGRX8888,
+ K_VENC_2D_OSD_FMT_BGRX4444,
+ K_VENC_2D_OSD_FMT_BGRX5551,
+ K_VENC_2D_OSD_FMT_RGB888,
+ K_VENC_2D_OSD_FMT_BGR888,
+ K_VENC_2D_OSD_FMT_RGB565,
+ K_VENC_2D_OSD_FMT_BGR565,
+ K_VENC_2D_OSD_FMT_SEPERATE_RGB,
+ K_VENC_2D_OSD_FMT_BUTT
+} k_venc_2d_osd_fmt;
+
+【注意事项】
+
+- 目前叠加图像只支持ARGB8888、ARGB4444和ARGB1555的格式。
+
+【相关数据类型及接口】
+无。
+
+#### 3.1.11 k_venc_2d_add_order
+
+【说明】
+定义2D运算的OSD叠加(video、osd和背景层)顺序枚举。
+
+【定义】
+typedef enum {
+/\* bottom ------\> top \*/
+ K_VENC_2D_ADD_ORDER_VIDEO_OSD= 0,
+ K_VENC_2D_ADD_ORDER_OSD_VIDEO,
+ K_VENC_2D_ADD_ORDER_VIDEO_BG,
+ K_VENC_2D_ADD_ORDER_BG_VIDEO,
+ K_VENC_2D_ADD_ORDER_VIDEO_BG_OSD,
+ K_VENC_2D_ADD_ORDER_VIDEO_OSD_BG,
+ K_VENC_2D_ADD_ORDER_BG_VIDEO_OSD,
+ K_VENC_2D_ADD_ORDER_BG_OSD_VIDEO,
+ K_VENC_2D_ADD_ORDER_OSD_VIDEO_BG,
+ K_VENC_2D_ADD_ORDER_OSD_BG_VIDEO,
+ K_VENC_2D_ADD_ORDER_BUTT
+} k_venc_2d_add_order;
+
+【成员】
+| 成员名称 | 描述 |
+|----------------------------------|------------------------------------------|
+| K_VENC_2D_ADD_ORDER_VIDEO_OSD | Video在底层,OSD在顶层。 |
+| K_VENC_2D_ADD_ORDER_OSD_VIDEO | OSD在底层,video在顶层。 |
+| K_VENC_2D_ADD_ORDER_VIDEO_BG | Video在底层,背景色顶层。 |
+| K_VENC_2D_ADD_ORDER_BG_VIDEO | 背景色在底层,video顶层。 |
+| K_VENC_2D_ADD_ORDER_VIDEO_BG_OSD | Video在底层,背景色在中间层,OSD在顶层。 |
+| K_VENC_2D_ADD_ORDER_VIDEO_OSD_BG | Video在底层,OSD在中间层,背景色在顶层。 |
+| K_VENC_2D_ADD_ORDER_BG_VIDEO_OSD | 背景色在底层,video在中间层,OSD在顶层。 |
+| K_VENC_2D_ADD_ORDER_BG_OSD_VIDEO | 背景色在底层,OSD在中间层,video在顶层。 |
+| K_VENC_2D_ADD_ORDER_OSD_VIDEO_BG | OSD在底层,video在中间层,背景色在顶层。 |
+| K_VENC_2D_ADD_ORDER_OSD_BG_VIDEO | OSD在底层,背景色在中间层,video在顶层。 |
+
+【注意事项】
+无。
+
+【相关数据类型及接口】
+无。
+
+#### 3.1.12 k_rotation
+
+【说明】
+定义编码旋转角度枚举。
+
+【定义】
+typedef enum {
+ K_VPU_ROTATION_0 = 0,
+ K_VPU_ROTATION_90 = 1,
+ K_VPU_ROTATION_180 = 2,
+ K_VPU_ROTATION_270 = 3,
+ K_VPU_ROTATION_BUTT
+} k_rotation;
+
+【成员】
+| 成员名称 | 描述 |
+|----------------------|-------------------|
+| K_VPU_ROTATION_0 | 不旋转,旋转0度。 |
+| K_VPU_ROTATION_90 | 旋转90度。 |
+| K_VPU_ROTATION_180 | 旋转180度。 |
+| K_VPU_ROTATION_270 | 旋转270度。 |
+
+【注意事项】
+无。
+
+【相关数据类型及接口】
+无。
+
+#### 3.1.13 k_venc_mirror
+
+【说明】
+定义编码翻转方式枚举。
+
+【定义】
+
+typedef enum {
+ K_VENC_MIRROR_HORI = 0,
+ K_VENC_MIRROR_VERT = 1,
+ K_VENC_MIRROR_BUTT
+} k_venc_mirror; |
+
+【成员】
+| 成员名称 | 描述 |
+|----------------------|-------------------|
+| K_VENC_MIRROR_HORI | 水平翻转。 |
+| K_VENC_MIRROR_VERT | 垂直翻转。 |
+
+【注意事项】
+无。
+
+【相关数据类型及接口】
+无。
+
+#### 3.1.14 k_venc_2d_color_gamut
+
+【说明】
+定义2D运算的色域枚举。
+
+【定义】
+typedef enum {
+ VENC_2D_COLOR_GAMUT_BT601 = 0,
+ VENC_2D_COLOR_GAMUT_BT709,
+ VENC_2D_COLOR_GAMUT_BT2020,
+ VENC_2D_COLOR_GAMUT_BUTT
+} k_venc_2d_color_gamut;
+
+【成员】
+| 成员名称 | 描述 |
+|----------------------------|-------------|
+| VENC_2D_COLOR_GAMUT_BT601 | BT.601色域 |
+| VENC_2D_COLOR_GAMUT_BT709, | BT.709色域 |
+| VENC_2D_COLOR_GAMUT_BT2020 | BT.2020色域 |
+
+【注意事项】
+无。
+
+【相关数据类型及接口】
+无。
+
+#### 3.1.15 k_venc_chn_attr
+
+【说明】
+定义编码通道属性结构体。
+
+【定义】
+typedef struct {
+ [k_venc_attr](#3116-k_venc_attr) venc_attr;
+ [k_venc_rc_attr](#3117-k_venc_rc_attr) rc_attr;
+} k_venc_chn_attr;
+
+【成员】
+| 成员名称 | 描述 |
+|-----------|------------------|
+| venc_attr | 编码器属性。 |
+| rc_attr | 码率控制器属性。 |
+
+【注意事项】
+无。
+
+【相关数据类型及接口】
+无。
+
+#### 3.1.16 k_venc_attr
+
+【说明】
+定义编码器属性结构体。
+
+【定义】
+typedef struct {
+ k_payload_type type;
+ k_u32 stream_buf_size;
+ k_u32 stream_buf_cnt;
+ k_u32 pic_width;
+ k_u32 pic_height;
+ k_venc_profile profile;
+} k_venc_attr;
+
+【成员】
+| 成员名称 | 描述 |
+|---|---|
+| type | 编码协议类型枚。 |
+| stream_buf_size | 码流buffer大小。 |
+| stream_buf_size | 码流buffer大小。 |
+| stream_buf_cnt | 码流buffer个数。|
+| profile | 编码的等级枚举。|
+| pic_width | 编码图像宽度。 取值范围: `[MIN_WIDTH, MAX_WIDTH]`,以像素为单 位。 必须是MIN_ALIGN的整数倍。 |
+| pic_height | 编码图像高度。 取值范围: `[MIN_HEIGHT, MAX_HEIGHT]`,以像素为 单位。 必须是MIN_ALIGN的整数倍。 |
+
+【注意事项】
+无。
+
+【相关数据类型及接口】
+无。
+
+#### 3.1.17 k_venc_rc_attr
+
+【说明】
+定义编码通道码率控制器属性结构体。
+
+【定义】
+typedef struct {
+ [k_venc_rc_mode](#316-k_venc_rc_mode) rc_mode;
+ union { [k_venc_cbr](#3118-k_venc_cbr) cbr;
+ [k_venc_vbr](#3119-k_venc_vbr) vbr;
+ [k_venc_fixqp](#3120-k_venc_fixqp) fixqp;
+ [k_venc_mjpeg_fixqp](#3121-k_venc_mjpeg_fixqp) mjpeg_fixqp;
+ };
+} k_venc_rc_attr;
+
+【成员】
+| 成员名称 | 描述 |
+|--------------|---------------------------------------------|
+| rc_mode | RC模式。 |
+| cbr | H.264/H.265协议编码通道固定比特率模式属性。 |
+| Vbr | H.264/H.265协议编码通道可变比特率模式属性。 |
+| fixqp | H.264/H.265协议编码通道固定qp模式属性。 |
+| mjpeg_fixqp | Mjpeg协议编码通道Fixqp模式属性。 |
+
+【注意事项】
+无。
+
+【相关数据类型及接口】
+无。
+
+#### 3.1.18 k_venc_cbr
+
+【说明】
+定义H.264/H.265编码通道CBR属性结构体。
+
+【定义】
+typedef struct {
+ k_u32 gop;
+ k_u32 stats_time;
+ k_u32 src_frame_rate;
+ k_u32 dst_frame_rate;
+ k_u32 bit_rate;
+} k_venc_cbr;
+
+【成员】
+| 成员名称 | 描述 |
+|-----------------|----------------------------------------------------|
+| gop | gop值。 |
+| stats_time | CBR码率统计时间,以秒为单位。 取值范围: `[1, 60]`。 |
+| src_frame_rate | 输入帧率,以fps为单位。 |
+| dst_frame_rate | 编码器输出帧率,以fps为单位。 |
+| bit_rate | 平均bitrate,以kbps为单位。 |
+
+【注意事项】
+
+- 如果设置的码率超过芯片手册中规定的最大实时码率,则不能保证实时编码。
+
+【相关数据类型及接口】
+无。
+
+#### 3.1.19 k_venc_vbr
+
+【说明】
+定义H.264/H.265编码通道VBR属性结构体。
+
+【定义】
+typedef struct {
+ k_u32 gop;
+ k_u32 stats_time;
+ k_u32 src_frame_rate;
+ k_u32 dst_frame_rate;
+ k_u32 max_bit_rate;
+ k_u32 bit_rate;
+} k_venc_vbr;
+
+【成员】
+| 成员名称 | 描述 |
+|-----------------|----------------------------------------------------|
+| gop | gop值。 |
+| stats_time | VBR码率统计时间,以秒为单位。 取值范围: `[1, 60]`。 |
+| src_frame_rate | 输入帧率,以fps为单位。 |
+| dst_frame_rate | 编码器输出帧率,以fps为单位。 |
+| max_bit_rate | 最大bitrate,以kbps为单位。 |
+| bit_rate | 平均bitrate,以kbps为单位。 |
+
+【注意事项】
+请参见[k_venc_cbr](#3118-k_venc_cbr)关于src_frame_rate和dst_frame_rate的说明。
+
+【相关数据类型及接口】
+无。
+
+#### 3.1.20 k_venc_fixqp
+
+【说明】
+定义H.264/H.265编码通道Fixqp属性结构体。
+
+【定义】
+typedef struct {
+ k_u32 gop;
+ k_u32 src_frame_rate;
+ k_u32 dst_frame_rate;
+ k_u32 i_qp; k_u32 p_qp;
+} k_venc_fixqp;
+
+【成员】
+| 成员名称 | 描述 |
+|-----------------|----------------------------------------|
+| gop | gop值。 |
+| src_frame_rate | 输入帧率,以fps为单位。 |
+| dst_frame_rate | 编码器输出帧率,以fps为单位。 |
+| i_qp | I帧所有宏块Qp值。 取值范围: `[0, 51]`。 |
+| q_qp | P帧所有宏块Qp值。 取值范围: `[0, 51]`。 |
+
+【注意事项】
+请参见[k_venc_cbr](#3118-k_venc_cbr)关于src_frame_rate和dst_frame_rate的说明。
+
+【相关数据类型及接口】
+无。
+
+#### 3.1.21 k_venc_mjpeg_fixqp
+
+【说明】
+定义MJPEG编码通道Fixqp属性结构体。
+
+【定义】
+typedef struct {
+ k_u32 src_frame_rate;
+ k_u32 dst_frame_rate;
+ k_u32 q_factor;
+} k_venc_mjpeg_fixqp;
+
+【成员】
+| 成员名称 | 描述 |
+|-----------------|-------------------------------------------|
+| src_frame_rate | 输入帧率,以fps为单位。 |
+| dst_frame_rate | 编码器输出帧率,以fps为单位。 |
+| q_factor | MJPEG编码的Qfactor。 取值范围: `[1, 99]`。 |
+
+【注意事项】
+请参见[k_venc_cbr](#3118-k_venc_cbr)关于src_frame_rate和dst_frame_rate的说明。
+
+【相关数据类型及接口】
+无。
+
+#### 3.1.22 k_venc_chn_status
+
+【说明】
+定义编码通道的状态结构体。
+
+【定义】
+typedef struct {
+ k_u32 cur_packs;
+ k_u64 release_pic_pts;
+ k_bool end_of_stream;
+} k_venc_chn_status;
+
+【成员】
+| 成员名称 | 描述 |
+|------------------|-------------------------|
+| cur_packs | 当前帧的码流包个数。 |
+| release_pic_pts | 释放码流对应图像的PTS。 |
+| end_of_stream | Stream结束标志位。 |
+
+【注意事项】
+无。
+
+【相关数据类型及接口】
+无。
+
+#### 3.1.23 k_venc_stream
+
+【说明】
+定义帧码流类型结构体。
+
+【定义】
+typedef struct {
+ [k_venc_pack](#3124-k_venc_pack) \*pack;
+ k_u32 pack_cnt;
+} k_venc_stream;
+
+【成员】
+| 成员名称 | 描述 |
+|----------|--------------------------|
+| pack | 帧码流包结构。 |
+| pack_cnt | 一帧码流的所有包的个数。 |
+
+【注意事项】
+无。
+
+【相关数据类型及接口】
+无。
+
+#### 3.1.24 k_venc_pack
+
+【说明】
+定义帧码流包结构体。
+
+【定义】
+ typedef struct {
+ k_u64 phys_addr;
+ k_u32 len;
+ k_u64 pts;
+ [k_venc_pack_type](#317-k_venc_pack_type) type;
+} k_venc_pack;
+
+【成员】
+| 成员名称 | 描述 |
+|------------|---------------------|
+| phys_addr | 码流包物理地址。 |
+| len | 码流包长度。 |
+| pts | 时间戳。单位: us。 |
+| type | 包数据类型。 |
+
+【注意事项】
+无。
+
+【相关数据类型及接口】
+无。
+
+#### 3.1.25 k_venc_2d_osd_attr
+
+【说明】
+2D叠加属性结构体。
+
+【定义】
+typedef struct{
+ k_u16 width;
+ k_u16 height;
+ k_u16 startx;
+ k_u16 starty;
+ k_u32 phys_addr`[3]`;
+ k_u8 bg_alpha;
+ k_u8 osd_alpha;
+ k_u8 video_alpha;
+ [k_venc_2d_add_order](#3111-k_venc_2d_add_order) add_order;
+ k_u32 bg_color;
+ [k_venc_2d_osd_fmt](#3110-k_venc_2d_osd_fmt) fmt;
+} k_venc_2d_osd_attr;
+
+【成员】
+| 成员名称 | 描述 |
+|-------------|---------------------------------------------------------------------------|
+| width | OSD叠加区域的宽度。 |
+| height | OSD叠加区域的高度。 |
+| startx | OSD叠加区域左上点在原图中x方向上的像素偏移 |
+| starty | OSD叠加区域左上点在原图中y方向上的像素偏移 |
+| phys_addr | OSD图像的物理地址。 |
+| bg_alpha | 背景层的透明度。 |
+| osd_alpha | OSD图像的透明度。 |
+| video_alpha | video输入图像的透明度。 |
+| add_order | OSD叠加顺序枚举。 |
+| bg_color | OSD背景层颜色,YUV444格式。 Y: bit0\~bit7 U: bit8\~bit15 V: bit16\~bit 23 |
+| fmt | OSD图像格式枚举。 |
+
+【注意事项】
+
+- 源图像以及目的图像在ddr的起始地址要保证8byte align。
+- 支持图像、osd的尺寸为偶数。
+- OSD的src和dst地址必须相同。
+
+【相关数据类型及接口】
+无。
+
+#### 3.1.26 k_venc_2d_border_attr
+
+【说明】
+2D画框结构体。
+
+【定义】
+typedef struct {
+ k_u16 width;
+ k_u16 height;
+ k_u16 line_width;
+ k_u32 color;
+ k_u16 startx;
+ k_u16 starty;
+} k_venc_2d_border_attr;
+
+【成员】
+| 成员名称 | 描述 |
+|------------|----------------------------------------------------------------------|
+| width | 画框区域的宽度,此为外框宽度,包含线宽。 |
+| height | 画框区域的高度,此为外框高度,包含线宽。 |
+| line_width | 画框的线宽。 |
+| color | 框的颜色。格式为YUV444 Y: bit0\~bit7 U: bit8\~bit15 V: bit16\~bit 23 |
+| startx | 画框区域左上点在原图中x方向上的像素偏移 |
+| starty | 画框区域左上点在原图中y方向上的像素偏移 |
+
+【注意事项】
+
+- 源图像以及目的图像在ddr的起始地址要保证8byte align。
+- 支持图像、框的尺寸为偶数。
+- src和dst地址必须相同。
+
+【相关数据类型及接口】
+无。
+
+#### 3.1.27 k_venc_h265_sao
+
+【说明】
+定义H.265协议编码通道Sao的结构体。
+
+【定义】
+typedef struct {
+ k_u32 slice_sao_luma_flag;
+ k_u32 slice_sao_chroma_flag;
+} k_venc_h265_sao;
+
+【成员】
+| 成员名称 | 描述 |
+|:--|:--|
+| slice_sao_luma_flag | 默认为1。取值范围:0或1。 |
+| slice_sao_chroma_flag | 默认为1。取值范围:0或1。 |
+
+【注意事项】
+无。
+
+#### 3.1.28 k_venc_rect
+
+【说明】
+定义矩形区域信息结构体。
+
+【定义】
+typedef struct {
+ k_s32 left;
+ k_s32 right;
+ k_u32 top;
+ k_u32 bottom;
+} k_venc_rect;
+
+【成员】
+| 成员名称 | 描述 |
+|:--|:--|
+| left | Left offset。 |
+| right | Right offset。 |
+| top | Top offset。 |
+| bottom | Bottom offset。 |
+
+【注意事项】
+无。
+
+【相关数据类型及接口】
+无。
+
+#### 3.1.29 k_venc_roi_attr
+
+【说明】
+定义编码感兴趣区域信息。
+
+【定义】
+typedef struct {
+ k_u32 idx;
+ k_bool enable;
+ k_bool is_abs_qp;
+ k_s32 qp;
+ [k_venc_rect](#3128-k_venc_rect) rect;
+} k_venc_roi_attr;
+
+【成员】
+| 成员名称 | 描述 |
+|:--|:--|
+| idx | ROI区域的索引,系统支持的索引范围为`[0,15]`,不支持超出这个范围的索引。 |
+| enable | 是否使能这个ROI区域。 |
+| is_abs_qp | ROI区域QP模式。K_FALSE:相对QP。K_TRUE:绝对QP。|
+| qp | QP值,范围`[0,51]`。 |
+| rect | ROI区域。left、 right、 top、bottom必须是16对齐。 |
+
+【注意事项】
+无。
+
+【相关数据类型及接口】
+无。
+
+#### 3.1.30 k_venc_h264_entropy
+
+【说明】
+定义H.264协议编码通道熵编码结构体。
+
+【定义】
+typedef struct {
+ k_u32 entropy_coding_mode;
+ k_u32 cabac_init_idc;
+} k_venc_h264_entropy;
+
+【成员】
+| 成员名称 | 描述 |
+|:--|:--|
+| entropy_coding_mode | 熵编码模式。0: cavlc。1: cabac。>=2没有意义。Baseline不支持cabac。 默认值为1。|
+| cabac_init_idc | 取值范围: `[0, 2]`, 默认值0,具体含义请参见H.264协议。 |
+
+【注意事项】
+无。
+
+【相关数据类型及接口】
+无。
+
+#### 3.1.31 k_venc_h265_entropy
+
+【说明】
+定义H.265协议编码通道熵编码结构体。
+
+【定义】
+typedef struct {
+ k_u32 cabac_init_flag;
+} k_venc_h265_entropy;
+
+【成员】
+| 成员名称 | 描述 |
+|:--|:--||
+| cabac_init_flag | 取值范围: `[0, 1]`, 默认值1,具体含义请参见H.265协议。 |
+
+【注意事项】
+无。
+
+【相关数据类型及接口】
+无。
+
+### 3.2 视频解码
+
+该功能模块的相关数据类型定义如下:
+
+- [K_VDEC_MAX_CHN_NUM](#321-k_vdec_max_chn_num):定义最大通道个数。
+- [k_vdec_send_mode](#322-k_vdec_send_mode):定义解码通道属性结构体。
+- [k_vdec_chn_attr](#323-k_vdec_chn_attr):定义解码通道属性结构体。
+- [k_vdec_chn_status](#324-k_vdec_chn_status):定义通道状态结构体。
+- [k_vdec_dec_err](#325-k_vdec_dec_err):定义解码错误信息结构体。
+- [k_vdec_stream](#326-k_vdec_stream):定义视频解码的码流结构体。
+- [k_vdec_supplement_info](#327-k_vdec_supplement_info):定义输出帧补充信息。
+
+#### 3.2.1 K_VDEC_MAX_CHN_NUM
+
+【说明】
+定义最大通道个数。
+
+【定义】
+
+\#define K_VDEC_MAX_CHN_NUM 4
+
+【注意事项】
+无。
+
+【相关数据类型及接口】
+无。
+
+#### 3.2.2 k_vdec_send_mode
+
+【说明】
+定义解码通道属性结构体。
+
+【定义】
+typedef enum {
+ K_VDEC_SEND_MODE_STREAM = 0,
+ K_VDEC_SEND_MODE_FRAME,
+ K_VDEC_SEND_MODE_BUTT
+} k_vdec_send_mode;
+
+【成员】
+| 成员名称 | 描述 |
+|-------------------------|--------------------------------|
+| K_VDEC_SEND_MODE_STREAM | 按流方式发送码流。 |
+| OT_VDEC_SEND_MODE_FRAME | 按帧方式发送码流。以帧为单位。 |
+
+【注意事项】
+目前只支持流式发送。
+
+【相关数据类型及接口】
+无。
+
+#### 3.2.3 k_vdec_chn_attr
+
+【说明】
+定义解码通道属性结构体。
+
+【定义】
+typedef struct {
+ k_payload_type type;
+ [k_vdec_send_mode](#322-k_vdec_send_mode) mode;
+ k_u32 pic_width;
+ k_u32 pic_height;
+ k_u32 stream_buf_size;
+ k_u32 frame_buf_size;
+ k_u32 frame_buf_cnt;
+ k_pixel_format pic_format;
+} k_vdec_chn_attr;
+
+【成员】
+| 成员名称 | 描述 |
+|------------------|---------------------------------------------------|
+| type | 解码协议类型枚举值。 |
+| mode | 码流发送方式。 |
+| pic_width | 通道支持的解码图像最大宽(以像素为单位) |
+| pic_height | 通道支持的解码图像最大高(以像素为单位) |
+| stream_buf_size | 码流缓存的大小。 |
+| frame_buf_size | 解码图像帧存buffer大小。 |
+| pic_format | 输入数据格式枚举,参考《K230 系统控制 API参考》。 |
+
+【注意事项】
+
+- 目前支持的pic_format为:PIXEL_FORMAT_YUV_SEMIPLANAR_420和PIXEL_FORMAT_YVU_PLANAR_420。
+
+【相关数据类型及接口】
+无。
+
+#### 3.2.4 k_vdec_chn_status
+
+【说明】
+定义通道状态结构体。
+
+【定义】
+typedef struct {
+ k_payload_type type;
+ k_bool is_started;
+ k_u32 recv_stream_frames;
+ k_u32 dec_stream_frames;
+ [k_vdec_dec_err](#325-k_vdec_dec_err) dec_err;
+ k_u32 width;
+ k_u32 height;
+ k_u64 latest_frame_pts;
+ k_bool end_of_stream;
+} k_vdec_chn_status;
+
+【成员】
+
+| 成员名称 | 描述 |
+|---------------------|----------------------------------------------------------------|
+| type | 解码协议。 |
+| is_started | 解码器是否已经启动接收码流。 |
+| recv_stream_frames | "码流buffer中已接收码流帧数。 -1表示无效。 流模式发送时无效。" |
+| dec_stream_frames | 码流buffer中已解码帧数。 |
+| dec_err | 解码错误信息。 |
+| width | 图像宽度。 |
+| height | 图像高度。 |
+| latest_frame_pts | 最新解码图像的时间戳。 |
+| end_of_stream | Stream结束标志位。 |
+
+【注意事项】
+无。
+
+【相关数据类型及接口】
+无。
+
+#### 3.2.5 k_vdec_dec_err
+
+【说明】
+定义解码错误信息结构体。
+
+【定义】
+typedef struct {
+ k_s32 set_pic_size_err;
+ k_s32 format_err;
+ k_s32 stream_unsupport;
+} k_vdec_dec_err;
+
+【成员】
+| 成员名称 | 描述 |
+|-------------------|----------------------------------------------------------|
+| set_pic_size_err | 图像的宽(或高)比通道的宽(或高)大。 |
+| format_err | 不支持的格式。 |
+| stream_unsupport | 不支持的规格(码流规格与解决方案宣称支持的规格不一致)。 |
+
+【注意事项】
+无。
+
+【相关数据类型及接口】
+无。
+
+#### 3.2.6 k_vdec_stream
+
+【说明】
+定义视频解码的码流结构体。
+
+【定义】
+typedef struct {
+ k_bool end_of_stream;
+ k_u64 pts;
+ k_u32 len;
+ k_u8 \* addr;
+} k_vdec_stream;
+
+【成员】
+| 成员名称 | 描述 |
+|---------------|------------------------------|
+| end_of_stream | 是否发完所有码流。 |
+| pts | 码流包的时间戳。以μs为单位。 |
+| len | 码流包的长度。以byte为单位。 |
+| addr | 码流包的地址。 |
+
+【注意事项】
+无。
+
+【相关数据类型及接口】
+无。
+
+#### 3.2.7 k_vdec_supplement_info
+
+【说明】
+定义输出帧补充信息。
+
+【定义】
+typedef struct {
+ k_payload_type type;
+ k_bool is_valid_frame;
+ k_bool end_of_stream;
+} k_vdec_supplement_info;
+
+【成员】
+| 成员名称 | 描述 |
+|----------------|----------------------|
+| type | 解码协议类型枚举值。 |
+| is_valid_frame | 是否为有效帧。 |
+| end_of_stream | Stream结束标志位。 |
+
+【注意事项】
+无。
+
+【相关数据类型及接口】
+无。
+
+#### 3.2.8 k_vdec_dsl_mode
+
+【说明】
+定义解码减小尺寸模式枚举。
+
+【定义】
+typedef enum {
+ K_VDEC_DSL_MODE_BY_SIZE,
+ K_VDEC_DSL_MODE_BY_RATIO,
+ K_VDEC_DSL_MODE_BUTT
+} k_vdec_dsl_mode;
+
+【成员】
+| 成员名称 | 描述 |
+|-------------------------|--------------------------------|
+| K_VDEC_DSL_MODE_BY_SIZE | 根据尺寸减小。 |
+| K_VDEC_DSL_MODE_BY_RATIO | 根据比例减小。 |
+
+【注意事项】
+无。
+
+【相关数据类型及接口】
+无。
+
+#### 3.2.9 k_vdec_dsl_size
+
+【说明】
+定义解码按照大小减小尺寸参数结构体。
+
+【定义】
+typedef struct {
+ k_u32 dsl_frame_width;
+ k_u32 dsl_frame_height;
+} k_vdec_dsl_size;
+
+【成员】
+| 成员名称 | 描述 |
+|-------------------------|--------------------------------|
+| dsl_frame_width | 减小尺寸后的宽度。 |
+| dsl_frame_height | 减小尺寸后的高度。 |
+
+【注意事项】
+无。
+
+【相关数据类型及接口】
+无。
+
+#### 3.2.10 k_vdec_dsl_ratio
+
+【说明】
+定义解码按照比例减小尺寸参数结构体。
+
+【定义】
+typedef struct {
+ k_u8 dsl_ratio_hor;
+ k_u8 dsl_ratio_ver;
+} k_vdec_dsl_ratio;
+
+【成员】
+| 成员名称 | 描述 |
+|-------------------------|--------------------------------|
+| dsl_frame_width | 减小尺寸水平方向的比例。 |
+| dsl_frame_height | 减小尺寸垂直方向的比例。 |
+
+【注意事项】
+无。
+
+【相关数据类型及接口】
+无。
+
+#### 3.2.11 k_vdec_downscale
+
+【说明】
+缩小尺寸结构体。
+
+【定义】
+typedef struct {
+ [k_vdec_dsl_mode](#328-k_vdec_dsl_mode) dsl_mode;
+ union
+ {
+ [k_vdec_dsl_size](#329-k_vdec_dsl_size) dsl_size;
+ [k_vdec_dsl_ratio](#3210-k_vdec_dsl_ratio) dsl_ratio;
+ };
+} k_vdec_downscale;
+
+【成员】
+| 成员名称 | 描述 |
+|----------------|----------------------|
+| dsl_mode | 减小尺寸模式枚举。 |
+| dsl_size | 按照大小减小尺寸参数结构体。 |
+| dsl_ratio | 按照比例减小尺寸参数结构体。 |
+
+【注意事项】
+无。
+
+【相关数据类型及接口】
+无。
+
+## 4. MAPI
+
+### 4.1 视频编码
+
+#### 4.1.1 概述
+
+MAPI是在小核调用,用以获取venc的码流数据。
+
+#### 4.1.2 编码数据流图
+
+图4-1
+
+
+
+典型的编码流程包括了输入图像的接收、图像的编码、数据流的跨核传输以及码流的输出等过程。
+
+上图编码模块(VENC)由VENC接收通道、编码通道、2D接收通道、2D运算模块组成,详见[1.2.1](#121-视频编码) 。
+
+#### 4.1.3 API
+
+视频编码模块主要提供视频编码通道的创建和销毁、视频编码通道的开启和停止接收图像、设置和获取编码通道属性、注册和解注册获取码流的回调函数等功能。
+
+该功能模块提供以下MAPI:
+
+[kd_mapi_venc_init](#4131-kd_mapi_venc_init)
+
+[kd_mapi_venc_deinit](#4132-kd_mapi_venc_deinit)
+
+[kd_mapi_venc_registercallback](#4133-kd_mapi_venc_registercallback)
+
+[kd_mapi_venc_unregistercallback](#4134-kd_mapi_venc_unregistercallback)
+
+[kd_mapi_venc_start](#4135-kd_mapi_venc_start)
+
+[kd_mapi_venc_stop](#4136-kd_mapi_venc_stop)
+
+[kd_mapi_venc_bind_vi](#4137-kd_mapi_venc_bind_vi)
+
+[kd_mapi_venc_unbind_vi](#4138-kd_mapi_venc_unbind_vi)
+
+[kd_mapi_venc_request_idr](#4139-kd_mapi_venc_request_idr)
+
+[kd_mapi_venc_enable_idr](#41310-kd_mapi_venc_enable_idr)
+
+##### 4.1.3.1 kd_mapi_venc_init
+
+【描述】
+初始化编码通道。
+
+【语法】
+k_s32 kd_mapi_venc_init(k_u32 chn_num, [k_venc_chn_attr](#3115-k_venc_chn_attr) \* pst_venc_attr)
+
+【参数】
+| 参数名称 | 描述 | 输入/输出 |
+|---------------|---------------------------------------------|-----------|
+| chn_num | VENC 通道号 取值范围:[0, VENC_MAX_CHN_NUM) | 输入 |
+| pst_venc_attr | VENC 通道属性指针。 静态属性。 | 输入 |
+
+【返回值】
+| 返回值 | 描述 |
+|--------|--------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值为错误码 |
+
+【芯片差异】
+无 。
+
+【需求】
+头文件:mapi_venc_api.h、k_venc_comm.h
+库文件:libmapi.a libipcmsg.a libdatafifo.a
+
+【注意】
+
+- 调用该接口前需要先初始化kd_mapi_sys_init ()和kd_mapi_media_init ()成功,详见“SYS MAPI”章节。
+- 重复初始化返回成功
+
+【举例】
+请参考sample_venc代码
+
+【相关主题】
+[kd_mapi_venc_deinit](#4132-kd_mapi_venc_deinit)
+[k_venc_chn_attr](#3115-k_venc_chn_attr)
+
+##### 4.1.3.2 kd_mapi_venc_deinit
+
+【描述】
+编码通道去初始化。
+
+【语法】
+k_s32 kd_mapi_venc_deinit(k_u32 chn_num)
+
+【参数】
+| 参数名称 | 描述 | 输入/输出 |
+|----------|---------------------------------------------|-----------|
+| chn_num | VENC 通道号 取值范围:[0, VENC_MAX_CHN_NUM) | 输入 |
+
+【返回值】
+| 返回值 | 描述 |
+|--------|-------------------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值为[错误码](#5-错误码) |
+
+【芯片差异】
+无 。
+
+【需求】
+头文件:mapi_venc_api.h、k_venc_comm.h
+库文件:libmapi.a libipcmsg.a libdatafifo.a
+
+【注意】
+无。
+
+【举例】
+无。
+
+【相关主题】
+[kd_mapi_venc_init](#4131-kd_mapi_venc_init)
+
+##### 4.1.3.3 kd_mapi_venc_registercallback
+
+【描述】
+注册编码通道回调函数,用于编码数据的获取。
+
+【语法】
+k_s32 kd_mapi_venc_registercallback(k_u32 chn_num, [kd_venc_callback_s](#4141-kd_venc_callback_s) \*pst_venc_cb);
+
+【参数】
+| 参数名称 | 描述 | 输入/输出 |
+|-------------|---------------------------------------------|-----------|
+| chn_num | VENC 通道号 取值范围:[0, VENC_MAX_CHN_NUM) | 输入 |
+| pst_venc_cb | 编码器回调函数结构体指针。 | 输入 |
+
+【返回值】
+| 返回值 | 描述 |
+|--------|-------------------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值为[错误码](#5-错误码) |
+
+【芯片差异】
+无 。
+
+【需求】
+头文件:mapi_venc_api.h、k_venc_comm.h
+库文件:libmapi.a libipcmsg.a libdatafifo.a
+
+【注意】
+
+- 回调函数结构体指针不能为空。
+- 结构体之内容完全一致时,才表示回调函数结构体相等。
+- 每个通道最多支持五个回调函数。
+
+【举例】
+无
+
+【相关主题】
+kd_mapi_venc_unregistercallback
+kd_venc_callback_s
+
+##### 4.1.3.4 kd_mapi_venc_unregistercallback
+
+【描述】
+解注册编码通道回调函数。
+
+【语法】
+k_s32 kd_mapi_venc_unregistercallback(k_u32 chn_num, [kd_venc_callback_s](#4141-kd_venc_callback_s) \*pst_venc_cb);
+
+【参数】
+| 参数名称 | 描述 | 输入/输出 |
+|-------------|---------------------------------------------|-----------|
+| chn_num | VENC 通道号 取值范围:[0, VENC_MAX_CHN_NUM) | 输入 |
+| pst_venc_cb | 编码器回调函数结构体指针。 | 输入 |
+
+【返回值】
+| 返回值 | 描述 |
+|--------|-------------------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值为[错误码](#5-错误码) |
+
+【芯片差异】
+无 。
+
+【需求】
+头文件:mapi_venc_api.h、k_venc_comm.h
+
+库文件:libmapi.a libipcmsg.a libdatafifo.a
+
+【注意】
+pst_venc_cb回调函数结构体内容与注册时的结构体内容完全一致时才能解注册该回调函数。
+
+【举例】
+无
+
+【相关主题】
+[kd_mapi_venc_registercallback](#4133-kd_mapi_venc_registercallback)
+
+##### 4.1.3.5 kd_mapi_venc_start
+
+【描述】
+启动编码通道。
+
+【语法】
+k_s32 kd_mapi_venc_start(k_s32 chn_num ,k_s32 s32_frame_cnt);
+
+【参数】
+| 参数名称 | 描述 | 输入/输出 |
+|---------------|---------------------------------------------|-----------|
+| chn_num | VENC 通道号 取值范围:[0, VENC_MAX_CHN_NUM) | 输入 |
+| s32_frame_cnt | 期望编码帧的个数 | 输入 |
+
+【返回值】
+| 返回值 | 描述 |
+|--------|-------------------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值为[错误码](#5-错误码) |
+
+【芯片差异】
+无 。
+
+【需求】
+头文件:mapi_venc_api.h、k_venc_comm.h
+库文件:libmapi.a libipcmsg.a libdatafifo.a
+
+【注意】
+
+- 场景一:视频流编码场景下,s32_frame_cnt 取值[KD_VENC_LIMITLESS_FRAME_COUNT](#4146-kd_venc_limitless_frame_count)
+- 场景二:单个或者多个数据编码的场景下,上一个编码完后才可以再次启动。
+- 场景一切换场景二时,需要先调用kd_mapi_venc_stop 接口。
+- 场景二切换场景一时,可以先调用kd_mapi_venc_stop 接口,也可以在编码完后再次启动编码。
+- 编码完成的标记请查看[kd_venc_data_s](#4143-kd_venc_data_s) 中end_of_stream。
+
+【举例】
+无。
+
+【相关主题】
+[kd_mapi_venc_stop](#4136-kd_mapi_venc_stop)
+
+##### 4.1.3.6 kd_mapi_venc_stop
+
+【描述】
+停止编码通道。
+
+【语法】
+k_s32 kd_mapi_venc_stop(k_s32 chn_num);
+
+【参数】
+| 参数名称 | 描述 | 输入/输出 |
+|----------|---------------------------------------------|-----------|
+| chn_num | VENC 通道号 取值范围:[0, VENC_MAX_CHN_NUM) | 输入 |
+
+【返回值】
+| 返回值 | 描述 |
+|--------|-------------------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值为[错误码](#5-错误码) |
+
+【芯片差异】
+无。
+
+【需求】
+头文件:mapi_venc_api.h、k_venc_comm.h
+库文件:libmapi.a libipcmsg.a libdatafifo.a
+
+【注意】
+无。
+
+【举例】
+无。
+
+【相关主题】
+[kd_mapi_venc_start](#4135-kd_mapi_venc_start)
+
+##### 4.1.3.7 kd_mapi_venc_bind_vi
+
+【描述】
+编码通道绑定输入源VI
+
+【语法】
+k_s32 kd_mapi_venc_bind_vi(k_s32 src_dev, k_s32 src_chn,k_s32 chn_num);
+
+【参数】
+| 参数名称 | 描述 | 输入/输出 |
+|----------|---------------------------------------------|-----------|
+| src_dev | 输入源Device ID | 输入 |
+| src_chn | 输入源Channel ID | 输入 |
+| chn_num | VENC 通道号 取值范围:[0, VENC_MAX_CHN_NUM) | 输入 |
+
+【返回值】
+| 返回值 | 描述 |
+|--------|-------------------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值为[错误码](#5-错误码) |
+
+【芯片差异】
+无。
+
+【需求】
+头文件:mapi_venc_api.h、k_venc_comm.h
+库文件:libmapi.a libipcmsg.a libdatafifo.a
+
+【注意】
+无。
+
+【举例】
+无。
+
+【相关主题】
+[kd_mapi_venc_unbind_vi](#4138-kd_mapi_venc_unbind_vi)
+
+##### 4.1.3.8 kd_mapi_venc_unbind_vi
+
+【描述】
+解绑定编码通道的输入源VI。
+
+【语法】
+k_s32 kd_mapi_venc_unbind_vi(k_s32 src_dev, k_s32 src_chn, k_s32 chn_num);
+
+【参数】
+| 参数名称 | 描述 | 输入/输出 |
+|----------|---------------------------------------------|-----------|
+| src_dev | 输入源Device ID | 输入 |
+| src_chn | 输入源Channel ID | 输入 |
+| chn_num | VENC 通道号 取值范围:[0, VENC_MAX_CHN_NUM) | 输入 |
+
+【返回值】
+| 返回值 | 描述 |
+|--------|-------------------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值为[错误码](#5-错误码) |
+
+【芯片差异】
+无。
+
+【需求】
+头文件:mapi_venc_api.h、k_venc_comm.h
+库文件:libmapi.a libipcmsg.a libdatafifo.a
+
+【注意】
+无。
+
+【举例】
+无。
+
+【相关主题】
+[kd_mapi_venc_bind_vi](#4137-kd_mapi_venc_bind_vi)
+
+##### 4.1.3.9 kd_mapi_venc_request_idr
+
+【描述】
+请求IDR帧,在调用之后立即产生一个IDR帧。
+
+【语法】
+k_s32 kd_mapi_venc_request_idr(k_s32 chn_num);
+
+【参数】
+| 参数名称 | 描述 | 输入/输出 |
+|----------|---------------------------------------------|-----------|
+| chn_num | VENC 通道号 取值范围:`[0, VENC_MAX_CHN_NUM]` | 输入 |
+
+【返回值】
+| 返回值 | 描述 |
+|--------|-------------------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值为[错误码](#5-错误码) |
+
+【芯片差异】
+无。
+
+【需求】
+头文件:mapi_venc_api.h、k_venc_comm.h
+库文件:libmapi.a libipcmsg.a libdatafifo.a
+
+【注意】
+无。
+
+【举例】
+无。
+
+【相关主题】
+[kd_mapi_venc_start](#4135-kd_mapi_venc_start)
+
+##### 4.1.3.10 kd_mapi_venc_enable_idr
+
+【描述】
+使能IDR帧,根据GOP间隔产生IDR帧。
+
+【语法】
+k_s32 kd_mapi_venc_enable_idr(k_s32 chn_num, k_bool idr_enable);
+
+【参数】
+| 参数名称 | 描述 | 输入/输出 |
+|----------|---------------------------------------------|-----------|
+| chn_num | VENC 通道号 取值范围:`[0, VENC_MAX_CHN_NUM]` | 输入 |
+| idr_enable | 是否是能IDR帧,0:不使能 1:使能 | 输入 |
+
+【返回值】
+| 返回值 | 描述 |
+|--------|-------------------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值为[错误码](#5-错误码) |
+
+【芯片差异】
+无。
+
+【需求】
+头文件:mapi_venc_api.h、k_venc_comm.h
+库文件:libmapi.a libipcmsg.a libdatafifo.a
+
+【注意】
+
+- 该接口应在[kd_mpi_venc_create_chn](#211-kd_mpi_venc_create_chn)之后,[kd_mpi_venc_start_chn](#213-kd_mpi_venc_start_chn)之前调用。
+
+【举例】
+无。
+
+【相关主题】
+[kd_mapi_venc_start](#4135-kd_mapi_venc_start)
+
+#### 4.1.4 数据类型
+
+视频编码相关的数据类型定义如下:
+[kd_venc_callback_s](#4141-kd_venc_callback_s)
+[pfn_venc_dataproc](#4142-pfn_venc_dataproc)
+[kd_venc_data_s](#4143-kd_venc_data_s)
+[k_venc_data_pack_s](#4144-k_venc_data_pack_s)
+[KD_VENC_MAX_FRAME_PACKCOUNT](#4145-kd_venc_max_frame_packcount)
+[KD_VENC_LIMITLESS_FRAME_COUNT](#4146-kd_venc_limitless_frame_count)
+
+##### 4.1.4.1 kd_venc_callback_s
+
+【说明】
+编码回调函数结构体。
+
+【定义】
+typedef struct
+{
+ [pfn_venc_dataproc](#4142-pfn_venc_dataproc)
+ k_u8 \*p_private_data;
+}kd_venc_callback_s;
+
+【成员】
+| 成员名称 | 描述 |
+|----------------|-------------------------------------------------------|
+| pfn_data_cb | 回调处理函数。用于获取编码数据 |
+| p_private_data | 私有数据指针。作为参数,在pfn_venc_dataproc中被调用。 |
+
+【注意事项】
+
+- 该结构体被注册后,编码启动后,有编码数据时,pfn_data_cb函数会被调用。用户通过该函数获取编码数据。
+- p_private_data为私有数据,用户可选用。
+
+【相关数据类型及接口】
+[kd_mapi_venc_registercallback](#4133-kd_mapi_venc_registercallback)
+[kd_mapi_venc_unregistercallback](#4134-kd_mapi_venc_unregistercallback)
+[pfn_venc_dataproc](#4142-pfn_venc_dataproc)
+
+##### 4.1.4.2 pfn_venc_dataproc
+
+【说明】
+定义编码数据回调函数。
+
+【定义】
+typedef k_s32 (*pfn_venc_dataproc)(k_u32 chn_num, [kd_venc_data_s](#4144-k_venc_data_pack_s) \*p_vstream_data, k_u8 \*p_private_data);
+
+【成员】
+| 成员名称 | 描述 |
+|----------------|--------------|
+| chn_num | 编码通道句柄 |
+| kd_venc_data_s | 数据指针 |
+| p_private_data | 私有数据指针 |
+
+【注意事项】
+无。
+
+【相关数据类型及接口】
+[kd_mapi_venc_registercallback](#4133-kd_mapi_venc_registercallback)
+[kd_mapi_venc_unregistercallback](#4134-kd_mapi_venc_unregistercallback)
+
+##### 4.1.4.3 kd_venc_data_s
+
+【说明】
+编码后的数据包类型。
+
+【定义】
+typedef struct
+{
+ [k_venc_chn_status](#3122-k_venc_chn_status);
+ k_u32 u32_pack_cnt;
+ [k_venc_data_pack_s](#4144-k_venc_data_pack_s) astPack `[`[KD_VENC_MAX_FRAME_PACKCOUNT](#4145-kd_venc_max_frame_packcount)`]`;
+}kd_venc_data_s;
+
+【成员】
+| 成员名称 | 描述 |
+|--------------|----------|
+| status | 通道状态 |
+| u32_pack_cnt | 包的数量 |
+| astPack | 数据包 |
+
+【注意事项】
+无。
+
+【相关数据类型及接口】
+[pfn_venc_dataproc](#4142-pfn_venc_dataproc)
+[kd_mapi_venc_start](#4135-kd_mapi_venc_start)
+
+##### 4.1.4.4 k_venc_data_pack_s
+
+【说明】
+编码后的数据包类型。
+
+【定义】
+typedef struct
+{
+ k_char * vir_addr;
+ k_u64 phys_addr;
+ k_u32 len;
+ k_u64 pts;
+ k_venc_pack_type type;
+}k_venc_data_pack_s;
+
+【成员】
+| 成员名称 | 描述 |
+|-----------|------------------|
+| vir_addr | 数据包的虚拟地址 |
+| phys_addr | 数据包的物理地址 |
+| len | 数据包的长度 |
+| pts | 时间戳 |
+| type | 码流PACK类型 |
+
+【注意事项】
+vir_addr和phys_addr都有一个地址;
+
+【相关数据类型及接口】
+[kd_venc_data_s](#4143-kd_venc_data_s)
+
+##### 4.1.4.5 KD_VENC_MAX_FRAME_PACKCOUNT
+
+【说明】
+定义每帧数据中包的最大个数。
+
+【定义】
+
+\#define KD_VENC_MAX_FRAME_PACKCOUNT 12
+
+【注意事项】
+无
+
+【相关数据类型及接口】
+无
+
+##### 4.1.4.6 KD_VENC_LIMITLESS_FRAME_COUNT
+
+【说明】
+定义视频无限制编码。
+
+【定义】
+
+\#define KD_VENC_LIMITLESS_FRAME_COUNT -1
+
+【注意事项】
+无。
+
+【相关数据类型及接口】
+[kd_mapi_venc_start](#4135-kd_mapi_venc_start)
+
+### 4.2 视频解码
+
+#### 4.2.1 API
+
+视频解码模块主要提供视频解码通道的创建和销毁、视频解码通道的开启和停止接收图像、设置和获取解码通道属性、与vo绑定输出解码图像等功能。
+
+该功能模块提供以下MAPI:
+
+[kd_mapi_vdec_init](#4211-kd_mapi_vdec_init)
+
+[kd_mapi_vdec_deinit](#4212-kd_mapi_vdec_deinit)
+
+[kd_mapi_vdec_start](#4213-kd_mapi_vdec_start)
+
+[kd_mapi_vdec_stop](#4214-kd_mapi_vdec_stop)
+
+[kd_mapi_vdec_bind_vo](#4137-kd_mapi_venc_bind_vi)
+
+[kd_mapi_vdec_unbind_vo](#4138-kd_mapi_venc_unbind_vi)
+
+[kd_mapi_vdec_send_stream](#4139-kd_mapi_venc_request_idr)
+
+[kd_mapi_vdec_query_status](#4218-kd_mapi_vdec_query_status)
+
+##### 4.2.1.1 kd_mapi_vdec_init
+
+【描述】
+初始化解码通道。
+
+【语法】
+k_s32 kd_mapi_vdec_init(k_u32 chn_num,const [k_vdec_chn_attr](#323-k_vdec_chn_attr) *attr);
+
+【参数】
+| 参数名称 | 描述 | 输入/输出 |
+|---------------|---------------------------------------------|-----------|
+| chn_num | VDEC 通道号 取值范围:[0, VDEC_MAX_CHN_NUM) | 输入 |
+| attr | VDEC 通道属性指针。 静态属性。 | 输入 |
+
+【返回值】
+| 返回值 | 描述 |
+|--------|--------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值为错误码 |
+
+【芯片差异】
+无 。
+
+【需求】
+头文件:mapi_vdec_api.h、k_vdec_comm.h
+库文件:libmapi.a libipcmsg.a libdatafifo.a
+
+【注意】
+
+- 调用该接口前需要先初始化kd_mapi_sys_init ()和kd_mapi_media_init ()成功,详见“SYS MAPI”章节。
+- 重复初始化返回成功
+
+【举例】
+请参考sample_vdec代码
+
+【相关主题】
+[kd_mapi_vdec_deinit](#4212-kd_mapi_vdec_deinit)
+
+##### 4.2.1.2 kd_mapi_vdec_deinit
+
+【描述】
+编码通道去初始化。
+
+【语法】
+k_s32 kd_mapi_vdec_deinit(k_u32 chn_num);
+
+【参数】
+| 参数名称 | 描述 | 输入/输出 |
+|----------|---------------------------------------------|-----------|
+| chn_num | VDEC 通道号 取值范围:[0, VDEC_MAX_CHN_NUM) | 输入 |
+
+【返回值】
+| 返回值 | 描述 |
+|--------|-------------------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值为[错误码](#5-错误码) |
+
+【芯片差异】
+无 。
+
+【需求】
+头文件:mapi_vdec_api.h、k_vdec_comm.h
+库文件:libmapi.a libipcmsg.a libdatafifo.a
+
+【注意】
+无。
+
+【举例】
+无。
+
+【相关主题】
+[kd_mapi_vdec_init](#4211-kd_mapi_vdec_init)
+
+##### 4.2.1.3 kd_mapi_vdec_start
+
+【描述】
+启动解码通道。
+
+【语法】
+k_s32 kd_mapi_vdec_start(k_u32 chn_num);
+
+【参数】
+| 参数名称 | 描述 | 输入/输出 |
+|---------------|---------------------------------------------|-----------|
+| chn_num | VDEC 通道号 取值范围:[0, VDEC_MAX_CHN_NUM) | 输入 |
+
+【返回值】
+| 返回值 | 描述 |
+|--------|-------------------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值为[错误码](#5-错误码) |
+
+【芯片差异】
+无 。
+
+【需求】
+头文件:mapi_venc_api.h、k_venc_comm.h
+库文件:libmapi.a libipcmsg.a libdatafifo.a
+
+【注意】
+无。
+【举例】
+无。
+
+【相关主题】
+[kd_mapi_vdec_stop](#4214-kd_mapi_vdec_stop)
+
+##### 4.2.1.4 kd_mapi_vdec_stop
+
+【描述】
+停止解码通道。
+
+【语法】
+k_s32 kd_mapi_vdec_stop(k_u32 chn_num);
+
+【参数】
+| 参数名称 | 描述 | 输入/输出 |
+|----------|---------------------------------------------|-----------|
+| chn_num | VDEC 通道号 取值范围:[0, VDEC_MAX_CHN_NUM) | 输入 |
+
+【返回值】
+| 返回值 | 描述 |
+|--------|-------------------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值为[错误码](#5-错误码) |
+
+【芯片差异】
+无。
+
+【需求】
+头文件:mapi_vdec_api.h、k_vdec_comm.h
+库文件:libmapi.a libipcmsg.a libdatafifo.a
+
+【注意】
+无。
+
+【举例】
+无。
+
+【相关主题】
+[kd_mapi_vdec_start](#4213-kd_mapi_vdec_start)
+
+##### 4.2.1.5 kd_mapi_vdec_bind_vo
+
+【描述】
+解码通道绑定输出源VO
+
+【语法】
+k_s32 kd_mapi_vdec_bind_vo(k_s32 chn_num,k_s32 vo_dev, k_s32 vo_chn);
+
+【参数】
+| 参数名称 | 描述 | 输入/输出 |
+|----------|---------------------------------------------|-----------|
+| chn_num | VDEC 通道号 取值范围:[0, VDEC_MAX_CHN_NUM) | 输入 |
+| vo_dev | 输出vo device id | 输入 |
+| vo_chn | 输出vo device channel | 输入 |
+
+【返回值】
+| 返回值 | 描述 |
+|--------|-------------------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值为[错误码](#5-错误码) |
+
+【芯片差异】
+无。
+
+【需求】
+头文件:mapi_vdec_api.h、k_vdec_comm.h
+库文件:libmapi.a libipcmsg.a libdatafifo.a
+
+【注意】
+无。
+
+【举例】
+无。
+
+【相关主题】
+[kd_mapi_vdec_unbind_vo](#4216-kd_mapi_vdec_unbind_vo)
+
+##### 4.2.1.6 kd_mapi_vdec_unbind_vo
+
+【描述】
+解绑定解码通道的输出源VO。
+
+【语法】
+k_s32 kd_mapi_vdec_unbind_ao(k_s32 chn_num,k_s32 vo_dev, k_s32 vo_chn);
+
+【参数】
+| 参数名称 | 描述 | 输入/输出 |
+|----------|---------------------------------------------|-----------|
+| chn_num | VDEC 通道号 取值范围:[0, VDEC_MAX_CHN_NUM) | 输入 |
+| vo_dev | 输出vo device id | 输入 |
+| vo_chn | 输出vo device channel | 输入 |
+
+【返回值】
+| 返回值 | 描述 |
+|--------|-------------------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值为[错误码](#5-错误码) |
+
+【芯片差异】
+无。
+
+【需求】
+头文件:mapi_vdec_api.h、k_vdec_comm.h
+库文件:libmapi.a libipcmsg.a libdatafifo.a
+
+【注意】
+无。
+
+【举例】
+无。
+
+【相关主题】
+[kd_mapi_vdec_bind_vo](#4215-kd_mapi_vdec_bind_vo)
+
+##### 4.2.1.7 kd_mapi_vdec_send_stream
+
+【描述】
+发送stream数据解码。
+
+【语法】
+k_s32 kd_mapi_vdec_send_stream(k_u32 chn_num, [k_vdec_stream](#326-k_vdec_stream) *stream, k_s32 milli_sec);
+
+【参数】
+| 参数名称 | 描述 | 输入/输出 |
+|----------|---------------------------------------------|-----------|
+| chn_num | VDEC 通道号 取值范围:[0, VDEC_MAX_CHN_NUM) | 输入 |
+| stream | 解码码流数据指针。 | 输入 |
+| milli_sec | 送码流方式标志。 取值范围: -1:阻塞。 0:非阻塞。 正值:超时时间,没有上限值,以ms为单位。 | 输入 |
+
+【返回值】
+| 返回值 | 描述 |
+|--------|-------------------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值为[错误码](#5-错误码) |
+
+【芯片差异】
+无。
+
+【需求】
+头文件:mapi_vdec_api.h、k_vdec_comm.h
+库文件:libmapi.a libipcmsg.a libdatafifo.a
+
+【注意】
+无。
+
+【举例】
+无。
+
+【相关主题】
+无。
+
+##### 4.2.1.8 kd_mapi_vdec_query_status
+
+【描述】
+查询解码通道状态。
+
+【语法】
+k_s32 kd_mapi_vdec_query_status(k_u32 chn_num, k_vdec_chn_status *status);
+
+【参数】
+| 参数名称 | 描述 | 输入/输出 |
+|---|---|---|
+| chn_num | 编码通道信息。 取值范围:[0, [K_VDEC_MAX_CHN_NUM](#321-k_vdec_max_chn_num))。 | 输入 |
+| status | 视频解码通道状态结构体指针。 | 输出 |
+
+【返回值】
+| 返回值 | 描述 |
+|--------|-------------------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值为[错误码](#5-错误码) |
+
+【芯片差异】
+无。
+
+【需求】
+头文件:mapi_vdec_api.h、k_vdec_comm.h
+库文件:libmapi.a libipcmsg.a libdatafifo.a
+
+【注意】
+无。
+
+【举例】
+无。
+
+【相关主题】
+无。
+
+## 5. 错误码
+
+表 41 编码 API 错误码
+| 错误代码 | 宏定义 | 描述 |
+|------------|--------------------------|----------------------------------------------|
+| 0xa0098001 | K_ERR_VENC_INVALID_DEVID | 设备ID超出合法范围 |
+| 0xa0098002 | K_ERR_VENC_INVALID_CHNID | 通道ID超出合法范围 |
+| 0xa0098003 | K_ERR_VENC_ILLEGAL_PARAM | 参数超出合法范围 |
+| 0xa0098004 | K_ERR_VENC_EXIST | 试图申请或者创建已经存在的设备、通道或者资源 |
+| 0xa0098005 | K_ERR_VENC_UNEXIST | 试图使用或者销毁不存在的设备、通道或者资源 |
+| 0xa0098006 | K_ERR_VENC_NULL_PTR | 函数参数中有空指针 |
+| 0xa0098007 | K_ERR_VENC_NOT_CONFIG | 使用前未配置 |
+| 0xa0098008 | K_ERR_VENC_NOT_SUPPORT | 不支持的参数或者功能 |
+| 0xa0098009 | K_ERR_VENC_NOT_PERM | 该操作不允许,如试图修改静态配置参数 |
+| 0xa009800c | K_ERR_VENC_NOMEM | 分配内存失败,如系统内存不足 |
+| 0xa009800d | K_ERR_VENC_NOBUF | 分配缓存失败,如申请的数据缓冲区太大 |
+| 0xa009800e | K_ERR_VENC_BUF_EMPTY | 缓冲区中无数据 |
+| 0xa009800f | K_ERR_VENC_BUF_FULL | 缓冲区中数据满 |
+| 0xa0098010 | K_ERR_VENC_NOTREADY | 系统没有初始化或没有加载相应模块 |
+| 0xa0098011 | K_ERR_VENC_BADADDR | 地址超出合法范围 |
+| 0xa0098012 | K_ERR_VENC_BUSY | VENC系统忙 |
+
+表 42 解码 API 错误码
+| 错误代码 | 宏定义 | 描述 |
+|------------|--------------------------|----------------------------------------------|
+| 0xa00a8001 | K_ERR_VDEC_INVALID_DEVID | 设备ID超出合法范围 |
+| 0xa00a8002 | K_ERR_VDEC_INVALID_CHNID | 通道ID超出合法范围 |
+| 0xa00a8003 | K_ERR_VDEC_ILLEGAL_PARAM | 参数超出合法范围 |
+| 0xa00a8004 | K_ERR_VDEC_EXIST | 试图申请或者创建已经存在的设备、通道或者资源 |
+| 0xa00a8005 | K_ERR_VDEC_UNEXIST | 试图使用或者销毁不存在的设备、通道或者资源 |
+| 0xa00a8006 | K_ERR_VDEC_NULL_PTR | 函数参数中有空指针 |
+| 0xa00a8007 | K_ERR_VDEC_NOT_CONFIG | 使用前未配置 |
+| 0xa00a8008 | K_ERR_VDEC_NOT_SUPPORT | 不支持的参数或者功能 |
+| 0xa00a8009 | K_ERR_VDEC_NOT_PERM | 该操作不允许,如试图修改静态配置参数 |
+| 0xa00a800c | K_ERR_VDEC_NOMEM | 分配内存失败,如系统内存不足 |
+| 0xa00a800d | K_ERR_VDEC_NOBUF | 分配缓存失败,如申请的数据缓冲区太大 |
+| 0xa00a800e | K_ERR_VDEC_BUF_EMPTY | 缓冲区中无数据 |
+| 0xa00a800f | K_ERR_VDEC_BUF_FULL | 缓冲区中数据满 |
+| 0xa00a8010 | K_ERR_VDEC_NOTREADY | 系统没有初始化或没有加载相应模块 |
+| 0xa00a8011 | K_ERR_VDEC_BADADDR | 地址超出合法范围 |
+| 0xa00a8012 | K_ERR_VDEC_BUSY | VDEC系统忙 |
+
+## 6. 调试信息
+
+多媒体内存管理和和系统绑定调试信息,请参考《K230 系统控制 API参考》。
diff --git "a/zh/01_software/board/mpp/K230_\350\247\206\351\242\221\350\276\223\345\207\272_API\345\217\202\350\200\203.md" "b/zh/01_software/board/mpp/K230_\350\247\206\351\242\221\350\276\223\345\207\272_API\345\217\202\350\200\203.md"
new file mode 100644
index 0000000..209714f
--- /dev/null
+++ "b/zh/01_software/board/mpp/K230_\350\247\206\351\242\221\350\276\223\345\207\272_API\345\217\202\350\200\203.md"
@@ -0,0 +1,1956 @@
+# K230视频输出API参考
+
+
+
+版权所有©2023北京嘉楠捷思信息技术有限公司
+
+
+
+## 免责声明
+
+您购买的产品、服务或特性等应受北京嘉楠捷思信息技术有限公司(“本公司”,下同)及其关联公司的商业合同和条款的约束,本文档中描述的全部或部分产品、服务或特性可能不在您的购买或使用范围之内。除非合同另有约定,本公司不对本文档的任何陈述、信息、内容的正确性、可靠性、完整性、适销性、符合特定目的和不侵权提供任何明示或默示的声明或保证。除非另有约定,本文档仅作为使用指导参考。
+
+由于产品版本升级或其他原因,本文档内容将可能在未经任何通知的情况下,不定期进行更新或修改。
+
+## 商标声明
+
+、“嘉楠”和其他嘉楠商标均为北京嘉楠捷思信息技术有限公司及其关联公司的商标。本文档可能提及的其他所有商标或注册商标,由各自的所有人拥有。
+
+**版权所有 © 2023北京嘉楠捷思信息技术有限公司。保留一切权利。**
+非经本公司书面许可,任何单位和个人不得擅自摘抄、复制本文档内容的部分或全部,并不得以任何形式传播。
+
+
+
+## 目录
+
+[TOC]
+
+## 前言
+
+### 概述
+
+本文档主要介绍视频输出系统控制模块的功能和用法,其它模块的功能和用法将各有专门的文档加以论述。
+
+### 读者对象
+
+本文档(本指南)主要适用于以下人员:
+
+- 技术支持工程师
+- 软件开发工程师
+
+### 缩略词定义
+
+| 简称 | 说明 |
+|------|--------------------------|
+| VO | Video output |
+| DSI | Display Serial Interface |
+
+### 修订记录
+
+| 文档版本号 | 修改说明 | 修改者 | 日期 |
+|------------|----------|------------|------------|
+| V1.0 | 初版 | 系统软件部 | 2023-03-10 |
+
+## 1. 概述
+
+VO(Video Output,视频输出)模块主动从内存相应位置读取视频和图形数据,并通过相应的显示设备输出视频和图形。芯片支持的显示/回写设备、视频层和图形层情况。
+
+LAYER层支持:
+
+| | LAYER0 | LAYER1 | LAYER2 |
+|------------|--------------------|--------------------|---------------------------|
+| 输入格式 | YUV420 NV12 | YUV420 NV12 | YUV420 NV12 YUV422 NV16 ? |
+| 最大分辨率 | 1920x1080 | 1920x1080 | 1920x1080 |
+| 叠加显示 | 支持可配置叠加顺序 | 支持可配置叠加顺序 | 支持可配置叠加顺序 |
+| Rotation | √ | √ | - |
+| Scaler | √ | - | - |
+| Mirror | √ | √ | - |
+| Gray | √ | √ | - |
+| 独立开关 | √ | √ | √ |
+
+OSD 层支持
+
+| | OSD0 | OSD1 | OSD2 | OSD3 |
+|--------------------|-----------------------------------------------------------|-----------------------------------------------------------|-----------------------------------------------------------|-----------------------------------------------------------|
+| 输入格式 | RGB888 RGB565 ARGB8888 Monochrome-8-bit RGB4444 RGB1555 | RGB888 RGB565 ARGB8888 Monochrome-8-bit RGB4444 RGB1555 | RGB888 RGB565 ARGB8888 Monochrome-8-bit RGB4444 RGB1555 | RGB888 RGB565 ARGB8888 Monochrome-8-bit RGB4444 RGB1555 |
+| 最大分辨率 | 1920x1080 | 1920x1080 | 1920x1080 | 1920x1080 |
+| 叠加显示 | 支持可配置叠加顺序 | 支持可配置叠加顺序 | 支持可配置叠加顺序 | 支持可配置叠加顺序 |
+| ARGB 265 等级ALPHA | √ | √ | √ | √ |
+| 独立开关 | √ | √ | √ | √ |
+
+### 1.1 硬件描述
+
+本次硬件介绍是以evblp3 做的介绍
+
+#### 1.1.1 Mipi接口
+
+在evblp3 上的硬件引脚如下:
+
+
+
+- 屏幕触摸iic用的iic4 (scl:gpio7,sda gpio8)
+- 屏幕触摸 rst:gpio29, int:gpio30
+- 屏幕的rst:gpio9,backlight:gpio31
+- Mipi的引脚和屏幕的引脚一一对应
+
+#### 1.1.2 实物图
+
+
+
+- 图中1为mipi接口,采用的是软排线
+- 图中2为mipi信号测试点、包含四路data线和一路clk线
+
+### 1.2 软件描述
+
+视频输出软件配置分为3部分配置:phy 配置、dsi配置、VO配置,
+
+#### 1.2.1 PHY的配置流程
+
+phy的频率需要配置三个参数、计算PLL、配置voc、配置freq,根据这三个参数就可以确定txphy的频率,每一个的参数计算如下。
+
+##### 1.2.1.1 计算phy的pll
+
+数据速率由 PLL 输出时钟相位频率的两倍给出:数据速率 (Gbps) = PLL Fout(GHz) \* 2,输出频率是输入参考频率和倍频/分频比的函数。 计算phy 的pll共分为4种范围做的计算,不同的频率对应着不同的频率,它可以通过以下方式确定:
+
+| M | m+2 |
+|--------|-----|
+| N | n+1 |
+| Fclkin | 24M |
+
+For:
+
+
+
+然而在这个需要遵循下边的限制:
+
+
+
+For:
+
+
+
+For:
+
+
+
+
+
+For:
+
+
+
+上边的每一个for 对应着一个pll的等级、不同的等级对应着不同的计算公式和限制,计算示例如下:
+
+Example:
+
+mipi 的速率为 445.5M:所以pll的速率就是222.75M,应该选择第二个公式,计算如下
+
+222750000 = 1M / 2N = (m+2) / 2(n+1) \* 24000000 , 整理完成公式如下:
+
+222.75n + 198.75 = 12m ,通过excel 计算如下:
+
+
+
+得出来的m = 295 ,n = 15。
+
+配置pll中的m 和n都是整数值、如果所有的值都不是整数,就需要在m 和 n的值做加1和减1处理、反推回去看哪个频率理你需要的最近,再去验证是否可用,不可以就重复上边的操作。
+
+##### 1.2.1.2 配置phy的voc
+
+配置phy 的voc 可以根据表格查询即可:
+
+
+
+
+
+Example:
+
+mipi 的速率为 445.5M:所以pll的速率就是222.75M,voc = 010111 = 0x17
+
+##### 1.2.1.3 配置freq
+
+配置phy 的freq 可以根据表格查询即可:
+
+
+
+
+
+
+
+Example:
+
+mipi 的速率为 445.5M:pll的速率就是222.75M,freq 选择0100101, 配置这个的时候需要将最高位bit\[7\] = 1,所有freq = 10100101= 0xa5
+
+#### 1.2.2 DSI的配置
+
+DSI(Display Serial Interface)是MIPI 定义的一组通信协议的一部分联盟,主要实现 MIPI DSI 规范中定义的所有协议功能的数字控制器,包含了具有两个和四个通道的双向 PHY。
+
+DSI在软件中主要配置屏幕显示用的timing和发送命令的功能。
+
+##### 1.2.2.1 配置显示器的timing
+
+每个厂家的屏幕都会有一组时序用来做屏幕的控制,主要包含了帧的控制时序和一行的控制时序,如下图所示:
+
+
+
+
+
+DSI中也会用到这些参数、配置的时序和屏幕一致即可。
+
+##### 1.2.2.2 DSI的命令下发
+
+需要dsi 先进入lp模式、然后就可以发送命令,需要的api如下:
+
+- [kd_mpi_dsi_set_lp_mode_send_cmd](#226-kd_mpi_dsi_set_lp_mode_send_cmd)
+- [kd_mpi_dsi_send_cmd](#223-kd_mpi_dsi_send_cmd)
+
+发送的数据是按照8位发送的,会根据数量自动选择发送长包还是短包。
+
+##### 1.2.2.3 DSI 的自测模式
+
+DSI 自测模式会按照自己配置的dsi timing 产生color bar 的数据发送出去,这样不依赖vo从ddr读取数据,测试模式显示如下图:
+
+
+
+DSI 和vo之间采用的是24位接口,所以配置出来的color bar 是上图的效果,使用方法只需要配置完成dsi之后使能color bar即可,api如下
+
+- [kd_mpi_dsi_set_test_pattern](#225-kd_mpi_dsi_set_test_pattern)
+
+#### 1.2.3 VO的配置
+
+VO(video output)主要是VO(Video Output,视频输出)模块主动从内存相应位置读取视频和图形数据,并通过相应的显示设备输出视频和图形,VO这部分包含两个配置、一个是timing 的配置、另一个是视频层的配置
+
+##### 1.2.3.1 VO 时序配置
+
+VO的时序配置和dsi 的时序配置采用的一样的配置参数,具体的行和列一样,看dsi timing 介绍即可
+
+##### V1.2.3.2 O的layer层配置
+
+VO layer 层目前支持3个layer层、4个osd层。Layer层只能显示yuv的图像格式(layer0 和 layer1 支持的功能在[概述](#概述)中的图表)。
+
+##### 1.2.3.3 VO 的回写功能配置
+
+VO 还支持回写功能、这个可以验证VO配置的是否正确,VO配置完成之后会将数据写回到ddr 当中,方便验证VO的配置是否出现异常
+
+#### 1.2.4 VO模块的调试方法
+
+##### 1.2.4.1 屏幕的测试方法
+
+- 可以通过LP命令配置屏幕进入自测模式、看产生的图像是否正常
+- 通过LP命令读取屏幕寄存器看是否有返回
+
+##### 1.2.4.2 DSI 的测试方法
+
+- 配置完dsi之后,让屏幕进入自测模式,量取信号看时候正常,也可以看屏幕是否产生color bar 的图像
+- 查看phy的err 状态寄存器、看是否有err 状态,可以通过proc查看
+
+##### 1.2.4.3 VO的测试方法
+
+- VO配置完成之后、打开writeback 功能,查看是否和配置的要求一致
+- 读取DSI的err状态寄存器,查看VO和dsi之间数据传输是否出现underflow和overflow,如果出现、适当的调整timing再次尝试
+
+## 2. API 参考
+
+### 2.1 TXPHY
+
+该功能模块提供以下API:
+
+- [kd_mpi_set_mipi_phy_attr](#211-kd_mpi_set_mipi_phy_attr)
+
+#### 2.1.1 kd_mpi_set_mipi_phy_attr
+
+【描述】
+
+设置phy 的频率
+
+【语法】
+
+k_s32 kd_mpi_set_mipi_phy_attr(k_vo_mipi_phy_attr \*attr)
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|--------------------|-----------|
+| attr | Phy 的频率结构描述 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|--------------------|
+| 0 | 成功。 |
+| 非0 | 失败,参见错误码。 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件: mpi_vo_api.h k_vo_comm.h
+- 库文件:libvo.a
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+### 2.2 DSI
+
+该功能模块提供以下API:
+
+- [kd_mpi_dsi_set_attr](#221-kd_mpi_dsi_set_attr)
+- [kd_mpi_dsi_enable](#222-kd_mpi_dsi_enable)
+- [kd_mpi_dsi_send_cmd](#223-kd_mpi_dsi_send_cmd)
+- [kd_mpi_dsi_read_pkg](#224-kd_mpi_dsi_read_pkg)
+- [kd_mpi_dsi_set_test_pattern](#225-kd_mpi_dsi_set_test_pattern)
+- [kd_mpi_dsi_set_lp_mode_send_cmd](#226-kd_mpi_dsi_set_lp_mode_send_cmd)
+
+#### 2.2.1 kd_mpi_dsi_set_attr
+
+【描述】
+
+配置dsi 属性参数
+
+【语法】
+
+k_s32 kd_mpi_dsi_set_attr(k_display_mode \*attr)【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|--------------|-----------|
+| attr | dsi 属性参数 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|--------------------|
+| 0 | 成功。 |
+| 非0 | 失败,参见错误码。 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件: mpi_vo_api.h k_vo_comm.h
+- 库文件:libvo.a
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+#### 2.2.2 kd_mpi_dsi_enable
+
+【描述】
+
+打开dsi
+
+【语法】
+
+k_s32 kd_mpi_dsi_enable(void)
+
+【参数】
+
+无
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|--------------------|
+| 0 | 成功。 |
+| 非0 | 失败,参见错误码。 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件: mpi_vo_api.h
+- 库文件:libvo.a
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+#### 2.2.3 kd_mpi_dsi_send_cmd
+
+【描述】
+
+Dsi 发送命令
+
+【语法】
+
+k_s32 kd_mpi_dsi_send_cmd(k_u8 \*data, k_s32 cmd_len)
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|------------|-----------|
+| data | 发送的数据 | 输入 |
+| cmd_len | 数据长度 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|--------------------|
+| 0 | 成功。 |
+| 非0 | 失败,参见错误码。 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件: mpi_vo_api.h
+- 库文件:libvo.a
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+#### 2.2.4 kd_mpi_dsi_read_pkg
+
+【描述】
+
+Dsi 读取命令
+
+【语法】
+
+k_s32 kd_mpi_dsi_read_pkg(k_u8 \*rx_buf, k_s32 cmd_len)
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|------------|-----------|
+| rx_buf, | 接受的数据 | 输入 |
+| cmd_len | 数据长度 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|--------------------|
+| 0 | 成功。 |
+| 非0 | 失败,参见错误码。 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件: mpi_vo_api.h
+- 库文件:libvo.a
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+#### 2.2.5 kd_mpi_dsi_set_test_pattern
+
+【描述】
+
+配置dsi 进入自测模式
+
+【语法】
+
+k_s32 kd_mpi_dsi_set_test_pattern(void)
+
+【参数】、
+
+无
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|--------------------|
+| 0 | 成功。 |
+| 非0 | 失败,参见错误码。 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件: mpi_vo_api.h
+- 库文件:libvo.a
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+#### 2.2.6 kd_mpi_dsi_set_lp_mode_send_cmd
+
+【描述】
+
+配置dsi 进入lp mode 发送命令
+
+【语法】
+
+k_s32 kd_mpi_dsi_set_lp_mode_send_cmd(void)
+
+【参数】
+
+无
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|--------------------|
+| 0 | 成功。 |
+| 非0 | 失败,参见错误码。 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件: mpi_vo_api.h
+- 库文件:libvo.a
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+### 2.3 VO
+
+- [kd_mpi_vo_init](#231-kd_mpi_vo_init)
+- [kd_mpi_vo_set_dev_param](#232-kd_mpi_vo_set_dev_param)
+- [kd_mpi_vo_enable_video_layer](#233-kd_mpi_vo_enable_video_layer)
+- [kd_mpi_vo_disable_video_layer](#234-kd_mpi_vo_disable_video_layer)
+- [kd_mpi_vo_enable](#235-kd_mpi_vo_enable)
+- [kd_mpi_vo_chn_insert_frame](#236-kd_mpi_vo_chn_insert_frame)
+- [kd_mpi_vo_chn_dump_frame](#237-kd_mpi_vo_chn_dump_frame)
+- [kd_mpi_vo_chn_dump_release](#238-kd_mpi_vo_chn_dump_release)
+- [kd_mpi_vo_osd_enable](#239-kd_mpi_vo_osd_enable)
+- [kd_mpi_vo_osd_disable](#2310-kd_mpi_vo_osd_disable)
+- [kd_mpi_vo_set_video_osd_attr](#2311-kd_mpi_vo_set_video_osd_attr)
+- [kd_mpi_vo_set_wbc_attr](#2312-kd_mpi_vo_set_wbc_attr)
+- [kd_mpi_vo_enable_wbc](#2313-kd_mpi_vo_enable_wbc)
+- [kd_mpi_vo_disable_wbc](#2314-kd_mpi_vo_disable_wbc)
+- [kd_display_reset](#2315-kd_display_reset)
+- [kd_display_set_backlight](#2316-kd_display_set_backlight)
+- [kd_mpi_vo_set_user_sync_info](#2317-kd_mpi_vo_set_user_sync_info)
+- kd_mpi_vo_draw_frame
+
+#### 2.3.1 kd_mpi_vo_init
+
+【描述】
+
+Vo 初始化默认参数
+
+【语法】
+
+k_s32 kd_mpi_vo_init(void);
+
+【参数】
+
+无
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|--------------------|
+| 0 | 成功。 |
+| 非0 | 失败,参见错误码。 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件: mpi_vo_api.h
+- 库文件:libvo.a
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+#### 2.3.2 kd_mpi_vo_set_dev_param
+
+【描述】
+
+Dsi 发送命令
+
+【语法】
+
+k_s32 kd_mpi_vo_set_dev_param(k_vo_pub_attr \*attr)
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|----------------------------------|-----------|
+| attr | 视频输出设备公共属性结构体指针。 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|--------------------|
+| 0 | 成功。 |
+| 非0 | 失败,参见错误码。 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件: mpi_vo_api.h k_vo_comm.h
+- 库文件:libvo.a
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+#### 2.3.3 kd_mpi_vo_enable_video_layer
+
+【描述】
+
+配置layer 层属性参数
+
+【语法】
+
+k_s32 kd_mpi_vo_enable_video_layer([k_vo_layer](#315-k_vo_layer) layer)
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|------------------------------------------------------|-----------|
+| layer | 视频输出视频层号 取值范围 【0 – K_MAX_VO_LAYER_NUM】 | 输入 |
+| attr | 视频层属性结构体指针 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|--------------------|
+| 0 | 成功。 |
+| 非0 | 失败,参见错误码。 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件: mpi_vo_api.h
+- 库文件:libvo.a
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+#### 2.3.4 kd_mpi_vo_disable_video_layer
+
+【描述】
+
+关闭视频层
+
+【语法】
+
+k_s32 kd_mpi_vo_disable_video_layer([k_vo_layer](#315-k_vo_layer) layer)
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|------------------------------------------------------|-----------|
+| layer | 视频输出视频层号 取值范围 【0 – K_MAX_VO_LAYER_NUM】 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|--------------------|
+| 0 | 成功。 |
+| 非0 | 失败,参见错误码。 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:
+- 库文件:
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+#### 2.3.5 kd_mpi_vo_enable
+
+【描述】
+
+打开vo
+
+【语法】
+
+k_u8 kd_mpi_vo_enable(void);
+
+【参数】
+
+无
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|--------------------|
+| 0 | 成功。 |
+| 非0 | 失败,参见错误码。 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:
+- 库文件:
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+#### 2.3.6 kd_mpi_vo_chn_insert_frame
+
+【描述】
+
+插入帧到vo的通道
+
+【语法】
+
+k_s32 kd_mpi_vo_chn_insert_frame(k_u32 chn_num, [k_video_frame_info](#3119-k_video_frame_info) \*vf_info)
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|----------------------|-----------|
+| chn_num | 通道数量 | 输入 |
+| vf_info | 视频帧的结构体指针。 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|--------------------|
+| 0 | 成功。 |
+| 非0 | 失败,参见错误码。 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件: mpi_vo_api.h k_video_comm.h
+- 库文件:libvo.a
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+#### 2.3.7 kd_mpi_vo_chn_dump_frame
+
+【描述】
+
+从vo 的通道中抓取一帧数据
+
+【语法】
+
+k_s32 kd_mpi_vo_chn_dump_frame(k_u32 chn_num, [k_video_frame_info](#3119-k_video_frame_info) \*vf_info, k_u32 timeout_ms);
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|------------|--------------------|-----------|
+| chn_num | 通道id | 输入 |
+| vf_info | 视频帧的结构体指针 | 输入 |
+| timeout_ms | 超时时间 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|--------------------|
+| 0 | 成功。 |
+| 非0 | 失败,参见错误码。 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件: mpi_vo_api.h k_video_comm.h
+- 库文件:libvo.a
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+#### 2.3.8 kd_mpi_vo_chn_dump_release
+
+【描述】
+
+释放抓取帧
+
+【语法】
+
+k_s32 kd_mpi_vo_chn_dump_release(k_u32 chn_num, const [k_video_frame_info](#3119-k_video_frame_info) \*vf_info);
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|--------------------|-----------|
+| chn_num | 通道id | 输入 |
+| vf_info | 视频帧的结构体指针 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|--------------------|
+| 0 | 成功。 |
+| 非0 | 失败,参见错误码。 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件: mpi_vo_api.h k_video_comm.h
+- 库文件:libvo.a
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+#### 2.3.9 kd_mpi_vo_osd_enable
+
+【描述】
+
+打开osd层
+
+【语法】
+
+k_s32 kd_mpi_vo_osd_enable([k_vo_osd](#314-k_vo_osd) layer)
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|----------------------------------------------------|-----------|
+| layer | 视频输出视频层号 取值范围 【0 – K_MAX_VO_OSD_NUM】 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|--------------------|
+| 0 | 成功。 |
+| 非0 | 失败,参见错误码。 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_vo_api.h k_vo_comm.h
+- 库文件:libvo.a
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+#### 2.3.10 kd_mpi_vo_osd_disable
+
+【描述】
+
+关闭osd层
+
+【语法】
+
+k_s32 kd_mpi_vo_osd_disable([k_vo_osd](#314-k_vo_osd) layer)
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|----------------------------------------------------|-----------|
+| layer | 视频输出视频层号 取值范围 【0 – K_MAX_VO_OSD_NUM】 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|--------------------|
+| 0 | 成功。 |
+| 非0 | 失败,参见错误码。 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_vo_api.h k_vo_comm.h
+- 库文件:libvo.a
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+#### 2.3.11 kd_mpi_vo_set_video_osd_attr
+
+【描述】
+
+设置osd层属性
+
+【语法】
+
+k_s32 kd_mpi_vo_set_video_osd_attr([k_vo_osd](#314-k_vo_osd) layer, [k_vo_video_osd_attr](#3118-k_vo_video_osd_attr) \*attr)
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------------|----------------------------------------------------|-----------|
+| layer | 视频输出视频层号 取值范围 【0 – K_MAX_VO_OSD_NUM】 | 输入 |
+| osd 层属性参数 | osd 层属性参数 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|--------------------|
+| 0 | 成功。 |
+| 非0 | 失败,参见错误码。 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_vo_api.h k_vo_comm.h
+- 库文件:libvo.a
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+#### 2.3.12 kd_mpi_vo_set_wbc_attr
+
+【描述】
+
+设置回写属性
+
+【语法】
+
+k_s32 kd_mpi_vo_set_wbc_attr([k_vo_wbc_attr](#3112-k_vo_wbc_attr) \*attr)
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|--------------------|-----------|
+| attr | writeback 属性参数 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|--------------------|
+| 0 | 成功。 |
+| 非0 | 失败,参见错误码。 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_vo_api.h k_vo_comm.h
+- 库文件:libvo.a
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+#### 2.3.13 kd_mpi_vo_enable_wbc
+
+【描述】
+
+使能writeback
+
+【语法】
+
+k_s32 kd_mpi_vo_enable_wbc(void)
+
+【参数】
+
+无
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|--------------------|
+| 0 | 成功。 |
+| 非0 | 失败,参见错误码。 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_vo_api.h k_vo_comm.h
+- 库文件:libvo.a
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+#### 2.3.14 kd_mpi_vo_disable_wbc
+
+【描述】
+
+关闭writeback
+
+【语法】
+
+k_s32 kd_mpi_vo_disable_wbc(void)
+
+【参数】
+
+无
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|--------------------|
+| 0 | 成功。 |
+| 非0 | 失败,参见错误码。 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_vo_api.h k_vo_comm.h
+- 库文件:libvo.a
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+#### 2.3.15 kd_display_reset
+
+【描述】
+
+复位视频输出子系统
+
+【语法】
+
+k_s32 kd_display_reset(void)
+
+【参数】
+
+无
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|--------------------|
+| 0 | 成功。 |
+| 非0 | 失败,参见错误码。 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_vo_api.h k_vo_comm.h
+- 库文件:libvo.a
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+#### 2.3.16 kd_display_set_backlight
+
+【描述】
+
+复位屏幕和打开背光
+
+【语法】
+
+k_s32 kd_display_set_backlight(void)
+
+【参数】
+
+无
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|--------------------|
+| 0 | 成功。 |
+| 非0 | 失败,参见错误码。 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_vo_api.h k_vo_comm.h
+- 库文件:libvo.a
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+#### 2.3.17 kd_mpi_vo_set_user_sync_info
+
+【描述】
+
+设置用户接口时序信息,用于配置时钟源、时钟大小和时钟分频比
+
+【语法】
+
+k_s32 kd_mpi_vo_set_user_sync_info([k_vo_user_sync_info](#318-k_vo_user_sync_info) \*sync_info)
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+| -------- | --------------- | --------- |
+| pre_div | 用户分频数 | 输入 |
+| clk_en | 分频enable 使能 | |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|--------------------|
+| 0 | 成功。 |
+| 非0 | 失败,参见错误码。 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_vo_api.h k_vo_comm.h
+- 库文件:libvo.a
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+#### 2.3.18 kd_mpi_vo_draw_frame
+
+【描述】
+
+画框
+
+【语法】
+
+k_s32 kd_mpi_vo_draw_frame([k_vo_draw_frame](#3115-k_vo_draw_frame) \*frame)
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|----------------|-----------|
+| frame | 画框的属性参数 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|--------------------|
+| 0 | 成功。 |
+| 非0 | 失败,参见错误码。 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:mpi_vo_api.h k_vo_comm.h
+- 库文件:libvo.a
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+## 3. 数据类型
+
+### 3.1 VO
+
+#### 3.1.1 k_vo_intf_sync
+
+【说明】
+
+定义视频中的分辨率和帧率
+
+【定义】
+
+```c
+typedef enum {
+K_VO_OUT_1080P30,
+K_VO_OUT_1080P60,
+}k_vo_intf_sync;
+```
+
+【成员】
+
+| 成员名称 | 描述 |
+|------------------------|------------------------------------------------|
+| K_VO_OUT_1080P30 | 1080 是表示1920x1080 个pix。30 表示 30fps |
+| K_VO_OUT_1080P60 | 1080 是表示1920x1080 个pix。60 表示 60fps |
+| K_VO_OUT_1080x1920P30 | 1080x1920 是表示1080x1920 个pix。30 表示 30fps |
+| K_VO_OUT_11080x1920P60 | 1080x1920 是表示1080x1920 个pix。60 表示 60fps |
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+#### 3.1.2 k_vo_intf_type
+
+【说明】
+
+定义视频中的分辨率和帧率
+
+【定义】
+
+```c
+typedef enum { K_VO_INTF_MIPI = 0, }k_vo_intf_type;
+```
+
+【成员】
+
+| 成员名称 | 描述 |
+|----------------|-----------|
+| K_VO_INTF_MIPI | Mipi 接口 |
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+#### 3.1.3 k_pixel_format
+
+【说明】
+
+显示中layer 支持的数据格式,下边结构体中只列举了显示支持的数据格式,并不是所有的数据格式
+
+【定义】
+
+| typedef enum { /\*yuv\*/ PIXEL_FORMAT_YVU_PLANAR_420, PIXEL_FORMAT_YVU_PLANAR_422, /\*RGB\*/ PIXEL_FORMAT_RGB_565, PIXEL_FORMAT_RGB_888, /\*ARGB\*/ PIXEL_FORMAT_ARGB_8888, PIXEL_FORMAT_ARGB_4444, PIXEL_FORMAT_ARGB_1555, PIXEL_FORMAT_RGB_MONOCHROME_8BPP, }k_pixel_format; |
+|--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------|
+| |
+
+【成员】
+
+| 成员名称 | 描述 |
+|----------------------------------|-------------|
+| PIXEL_FORMAT_YVU_PLANAR_420 | YUV420 NV12 |
+| PIXEL_FORMAT_YVU_PLANAR_422 | YUV422 NV16 |
+| PIXEL_FORMAT_RGB_565 | RGB565 |
+| PIXEL_FORMAT_RGB_888 | RGB888 |
+| PIXEL_FORMAT_RGB_MONOCHROME_8BPP | 8 BIT RGB |
+| PIXEL_FORMAT_ARGB_8888 | ARGB8888 |
+| PIXEL_FORMAT_ARGB_4444 | ARGB4444 |
+| PIXEL_FORMAT_ARGB_1555 | ARGB1444 |
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+无
+
+#### 3.1.4 k_vo_osd
+
+【说明】
+
+OSD 的数量和每一个osd 的编号
+
+【定义】
+
+| typedef enum { K_VO_OSD0, K_VO_OSD1, K_VO_OSD2, K_VO_OSD3, K_MAX_VO_OSD_NUM, }k_vo_osd; |
+|----------------------------------------------------------------------------------------------|
+| |
+
+【成员】
+
+| 成员名称 | 描述 |
+|------------------|---------------------|
+| K_VO_OSD0 | 第0层osd |
+| K_VO_OSD1 | 第1层osd |
+| K_VO_OSD2 | 第2层osd |
+| K_VO_OSD3 | 第3层osd |
+| K_MAX_VO_OSD_NUM | Osd 层最大数量标志 |
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+无
+
+#### 3.1.5 k_vo_layer
+
+【说明】
+
+layer 的数量和每一个layer的编号
+
+【定义】
+
+| typedef enum { K_VO_LYAER0 = 0, K_VO_LYAER1, K_VO_LYAER2, K_MAX_VO_LAYER_NUM, }k_vo_layer; |
+|------------------------------------------------------------------------------------------------|
+| |
+
+成员】
+
+| 成员名称 | 描述 |
+|--------------------|-----------------------|
+| K_VO_LYAER0 | 第0层layer |
+| K_VO_LYAER1 | 第1层layer |
+| K_VO_LYAER2 | 第2层layer |
+| K_VO_LYAER3 | 第3层layer |
+| K_MAX_VO_LAYER_NUM | layer 层最大数量标志 |
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+无
+
+#### 3.1.6 k_vo_rotation
+
+【说明】
+
+Layer rotation 支持的功能
+
+【定义】
+
+| typedef enum { K_ROTATION_0 = (0x01L \<\< 0), K_ROTATION_90 = (0x01L \<\< 1), K_ROTATION_180 = (0x01L \<\< 2), K_ROTATION_270 = (0x01L \<\< 3), } k_vo_rotation; |
+|----------------------------------------------------------------------------------------------------------------------------------------------------------------------|
+| |
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+无
+
+#### 3.1.7 k_vo_mirror_mode
+
+【说明】
+
+Layer mirror 支持的功能。
+
+【定义】
+
+| typedef enum { K_VO_MIRROR_NONE = (0x01L \<\< 4), K_VO_MIRROR_HOR = (0x01L \<\< 5), K_VO_MIRROR_VER = (0x01L \<\< 6), K_VO_MIRROR_BOTH = (0x01L \<\< 7), } k_vo_mirror_mode; |
+|---------------------------------------------------------------------------------------------------------------------------------------------------------------------------------|
+| |
+
+【成员】
+
+| 成员名称 | 描述 |
+|------------------|-------------------------|
+| K_VO_MIRROR_NONE | Layer 不做mirror |
+| K_VO_MIRROR_HOR | Layer 只做水平mirrot |
+| K_VO_MIRROR_VER | Layer只做垂直mirror |
+| K_VO_MIRROR_BOTH | Layer做垂直和水平mirror |
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+无
+
+#### 3.1.8 k_vo_user_sync_info
+
+【说明】
+
+用户自定义做时钟分频。
+
+【定义】
+
+| typedef struct { k_u32 ext_div; k_u32 dev_div; k_u32 clk_en; } k_vo_user_sync_info; |
+|----------------------------------------------------------------------------------------|
+| |
+
+【成员】
+
+| 成员名称 | 描述 |
+|----------|------------------|
+| ext_div; | Clkext 分频 |
+| dev_div | Clk 分频 |
+| clk_en | Display 时钟使能 |
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+无
+
+#### 3.1.9 k_vo_point
+
+【说明】
+
+定义坐标信息结构体。
+
+【定义】
+
+| typedef struct { k_u32 x; k_u32 y; } k_vo_point; |
+|----------------------------------------------------|
+| |
+
+【成员】
+
+| 成员名称 | 描述 |
+|----------|--------|
+| x | 横坐标 |
+| y | 纵坐标 |
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+无
+
+#### 3.1.10 k_vo_size
+
+【说明】
+
+定义大小信息结构体。
+
+【定义】
+
+| typedef struct { k_u32 width; k_u32 height; } k_vo_size; |
+|------------------------------------------------------------|
+| |
+
+【成员】
+
+| 成员名称 | 描述 |
+|----------|------|
+| width | 宽度 |
+| height | 高度 |
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+无
+
+#### 3.1.11 k_vo_video_layer_attr
+
+【说明】
+
+定义 display layer 层属性
+
+【定义】
+
+| typedef struct { k_point display_rect; k_size img_size k_pixel_format pixel_format; k_u32 stride; k_u32 uv_swap_en; k_u32 alptha_tpye; //only osd use } k_vo_video_layer_attr; |
+|---------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------|
+| |
+
+【成员】
+
+| 成员名称 | 描述 |
+|---------------|-----------------------------------------------------------------------------------------------------------------------------------------------------------------|
+| display_rect; | OSD图层的的起始位置 |
+| img_size | 图像分辨率结构体,即合成画面的尺寸 |
+| pixel_format | 视频层支持的数据格式 |
+| stride | 图像的stride |
+| uv_swap_en | Uv 交换 |
+| alptha_tpye | Alptha 的类型,仅osd层使用。分为固定alpha(可分为256等级)、以 RGB 中R作为alpha 通道、以 RGB 中G作为alpha 通道、以 RGB 中B作为alpha 通道、以alpha 通道作为alpha |
+
+【注意事项】
+
+alptha_tpye 仅对osd 层使用
+
+【相关数据类型及接口】
+
+无
+
+#### 3.1.12 k_vo_wbc_attr
+
+【说明】
+
+定义 writeback属性。
+
+【定义】
+
+| typedef struct { [k_vo_size](#3110-k_vo_size) target_size; [k_pixel_format](#313-k_pixel_format) pixel_format; k_u32 stride; k_u32 y_phy_addr; } k_vo_wbc_attr; | |
+|-------------------------------------------------------------------------------------------------------------------------------------------------------------|--------------------|
+| | |
+| 成员名称 | 描述 |
+| target_size | 回写的目标大小 |
+| pixel_format; | 回写的数据格式 |
+| stride | 回写的stride |
+| y_addr | 图像回写的物理地址 |
+
+【注意事项】
+
+y_addr 需要分配空间
+
+【相关数据类型及接口】
+
+无
+
+#### 3.1.13 k_vo_pub_attr
+
+【说明】
+
+配置视频输出设备的公共属性。
+
+【定义】
+
+| typedef struct { k_u32 bg_color; //yuv [k_vo_intf_type](#312-k_vo_intf_type) intf_type; [k_vo_intf_sync](#311-k_vo_intf_sync) intf_sync; [k_vo_display_resolution](#3116-k_vo_display_resolution) \*sync_info; // }k_vo_pub_attr; |
+|--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------|
+| |
+
+【成员】
+
+| | |
+|-----------|--------------------------|
+| 成员名称 | 描述 |
+| bg_color | 背景色 |
+| type | 接口类型,目前只支持mipi |
+| intf_sync | 视频中的分辨率和帧率 |
+| sync_info | 图像输出的时序 |
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+无
+
+#### 3.1.14 k_vo_scaler_attr
+
+【说明】
+
+定义 scaler 属性
+
+【定义】
+
+| typedef struct { k_size in_size; k_size out_size; k_u32 stride; }k_vo_scaler_attr; |
+|---------------------------------------------------------------------------------------|
+| |
+
+【成员】
+
+| 成员名称 | 描述 |
+|----------|--------------------|
+| in_size | 输入的尺寸 |
+| out_size | 输出的尺寸 |
+| stride | 输入的stride |
+| y_addr | 图像回写的物理地址 |
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+无
+
+#### 3.1.15 k_vo_draw_frame
+
+【说明】
+
+定义 画框的 属性
+
+【定义】
+
+| typedef struct { k_u32 draw_en; k_u32 line_x_start; k_u32 line_y_start; k_u32 line_x_end; k_u32 line_y_end; k_u32 frame_num; }k_vo_draw_frame; |
+|------------------------------------------------------------------------------------------------------------------------------------------------------|
+| |
+
+【成员】
+
+| 成员名称 | 描述 |
+|--------------|--------------------------|
+| draw_en | 画框使能 |
+| line_x_start | X 方向的起始 |
+| line_y_start | y方向的起始 |
+| line_x_end | X方向的终点未知 |
+| line_y_end | y方向的终点未知 |
+| frame_num | 当前框的num号 【0 - 16】 |
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+无
+
+#### 3.1.16 k_vo_display_resolution
+
+【说明】
+
+Display timing属性。
+
+【定义】
+
+| typedef struct { k_u32 pclk; k_u32 phyclk; k_u32 htotal; k_u32 hdisplay; k_u32 hsync_len; k_u32 hback_porch; k_u32 hfront_porch; k_u32 vtotal; k_u32 vdisplay; k_u32 vsync_len; k_u32 vback_porch; k_u32 vfront_porch; } k_vo_display_resolution; |
+|---------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------|
+| |
+
+【成员】
+
+| 成员名称 | 描述 |
+|--------------|--------------------|
+| pclk | Vo 的pix clk 频率 |
+| phyclk | d-phy 的频率 |
+| htotal | 一行的总像素 |
+| hdisplay | 一行的有效像素个数 |
+| hsync_len | 行同步的像素个数 |
+| hback_porch | 后肩 的像素个数 |
+| hfront_porch | 前肩 的像素个数 |
+| vtotal | 总行数 |
+| vdisplay | 一帧有效的行数 |
+| vsync_len | 帧同步的像素个数 |
+| vback_porch | 后肩 的行数 |
+| vfront_porch | 前肩 的行数 |
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+无
+
+#### 3.1.17 k_vo_mipi_phy_attr
+
+]【说明】
+
+定义 mipi phy 频率的结构体
+
+【定义】
+
+| typedef struct { k_u32 n; k_u32 m; k_u32 voc; k_u32 phy_lan_num; k_u32 hs_freq; }k_vo_mipi_phy_attr; |
+|-----------------------------------------------------------------------------------------------------------|
+| |
+
+【成员】
+
+| 成员名称 | 描述 |
+|-------------|----------------|
+| n | Pll 系数 |
+| m | Pll 系数 |
+| voc | Pll 系数 |
+| hs_freq | Phy 的频率范围 |
+| phy_lan_num | Phy 的lan 数量 |
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+无
+
+#### 3.1.18 k_vo_video_osd_attr
+
+【说明】
+
+配置osd层的公共属性。
+
+【定义】
+
+| typedef struct { [k_vo_point](#3110-k_vo_size) display_rect; [k_vo_size](#3110-k_vo_size) img_size; [k_pixel_format](#313-k_pixel_format) pixel_format; k_u32 stride; k_u8 global_alptha; } k_vo_video_osd_attr; |
+|-----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------|
+| |
+
+【成员】
+
+| 成员名称 | 描述 |
+|---------------|------------|
+| display_rect | 位置信息 |
+| img_size | 有效的size |
+| pixel_format | 数据格式 |
+| stride; | Stride |
+| global_alptha | 透明度 |
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+无
+
+#### 3.1.19 k_video_frame_info
+
+【说明】
+
+一帧的信息。
+
+【定义】
+
+| typedef struct { k_video_frame v_frame; /\*\*\< Video picture frame \*/ k_u32 pool_id; /\*\*\< VB pool ID \*/ k_mod_id mod_id; /\*\*\< Logical unit for generating video frames \*/ } k_video_frame_info; |
+|--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------|
+| |
+
+【成员】
+
+| 成员名称 | 描述 |
+|----------|-------------|
+| v_frame | 帧的信息 |
+| pool_id | VB pool ID |
+| mod_id | Video帧的id |
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+无
+
+## 4. 错误码
+
+表 41 xxx API 错误码
+
+| 错误代码 | 宏定义 | 描述 |
+|------------|------------------------|----------------|
+| 0xa00b8006 | K_ERR_VO_NULL_PTR | 参数空指针错误 |
+| 0xa00b8001 | K_ERR_VO_INVALID_DEVID | 无效dev id |
+| 0xa00b8002 | K_ERR_VO_INVALID_CHNID | 无效 chn id |
+| 0xa00b8005 | K_ERR_VO_UNEXIST | 视频缓存不存在 |
+| 0xa00b8004 | K_ERR_VO_EXIST | 视频缓存存在 |
+| 0xa00b8003 | K_ERR_VO_ILLEGAL_PARAM | 参数设置无效 |
+| 0xa00b8010 | K_ERR_VO_NOTREADY | vo还未就绪 |
+| 0xa00b8012 | K_ERR_VO_BUSY | 系统忙 |
+| 0xa00b8007 | K_ERR_VO_NOT_CONFIG | 不允许配置 |
+| 0xa00b8008 | K_ERR_VO_NOT_SUPPORT | 不支持的操作 |
+| 0xa00b8009 | K_ERR_VO_NOT_PERM | 操作不允许 |
+| 0xa00b800c | K_ERR_VO_NOMEM | 分配内存失败 |
+| 0xa00b800d | K_ERR_VO_NOBUF | 没有buff |
+| 0xa00b800e | K_ERR_VO_BUF_EMPTY | Buf 为空 |
+| 0xa00b800f | K_ERR_VO_BUF_FULL | Buf 为满 |
+| 0xa00b8011 | K_ERR_VO_BADADDR | 错误的地址 |
+| 0xa00b8012 | K_ERR_VO_BUSY | 系统忙 |
diff --git "a/zh/01_software/board/mpp/K230_\351\237\263\351\242\221_API\345\217\202\350\200\203.md" "b/zh/01_software/board/mpp/K230_\351\237\263\351\242\221_API\345\217\202\350\200\203.md"
new file mode 100644
index 0000000..573c913
--- /dev/null
+++ "b/zh/01_software/board/mpp/K230_\351\237\263\351\242\221_API\345\217\202\350\200\203.md"
@@ -0,0 +1,3412 @@
+# K230音频API参考
+
+
+
+版权所有©2023北京嘉楠捷思信息技术有限公司
+
+
+
+## 免责声明
+
+您购买的产品、服务或特性等应受北京嘉楠捷思信息技术有限公司(“本公司”,下同)及其关联公司的商业合同和条款的约束,本文档中描述的全部或部分产品、服务或特性可能不在您的购买或使用范围之内。除非合同另有约定,本公司不对本文档的任何陈述、信息、内容的正确性、可靠性、完整性、适销性、符合特定目的和不侵权提供任何明示或默示的声明或保证。除非另有约定,本文档仅作为使用指导参考。
+
+由于产品版本升级或其他原因,本文档内容将可能在未经任何通知的情况下,不定期进行更新或修改。
+
+## 商标声明
+
+、“嘉楠”和其他嘉楠商标均为北京嘉楠捷思信息技术有限公司及其关联公司的商标。本文档可能提及的其他所有商标或注册商标,由各自的所有人拥有。
+
+**版权所有 © 2023北京嘉楠捷思信息技术有限公司。保留一切权利。**
+非经本公司书面许可,任何单位和个人不得擅自摘抄、复制本文档内容的部分或全部,并不得以任何形式传播。
+
+
+
+## 目录
+
+[TOC]
+
+## 前言
+
+### 概述
+
+AUDIO模块包括音频输入、音频输出、音频编码、音频解码四个子模块以及对内置audio codec的控制。
+
+### 读者对象
+
+本文档(本指南)主要适用于以下人员:
+
+- 技术支持工程师
+- 软件开发工程师
+
+### 缩略词定义
+
+| 简称 | 说明 |
+|------|--------------|
+| ai | 音频输入模块 |
+| ao | 音频输出模块 |
+| aenc | 音频编码模块 |
+| adec | 音频解码模块 |
+
+### 修订记录
+
+| 文档版本号 | 修改说明 | 修改者 | 日期 |
+| ---------- | ------------------------------------------------------------ | ----------- | --------- |
+| V1.0 | 初版 | 孙小朋 | 2023/3/7 |
+| V1.1 | 1)增加i2s内置codec的支持 2)增加pdm 单/双声道支持 3)增加ai、ao 不同采样精度支持(16/24/32) 4)api接口不变,增加了参数属性,完善了文档。 | 孙小朋 | 2023/3/27 |
+| V1.1.1 | 增加音频编解码api 接口 增加声音质量增强api接口[kd_mpi_ai_set_vqe_attr](#219-kd_mpi_ai_set_vqe_attr)/[kd_mpi_ai_get_vqe_attr](#2110-kd_mpi_ai_get_vqe_attr),以及说明。 | 孙小朋/崔妍 | 2023/4/12 |
+| V1.2 | 修改声音质量增强API接口[kd_mpi_ai_set_vqe_attr](#219-kd_mpi_ai_set_vqe_attr)/[kd_mpi_ai_get_vqe_attr](#2110-kd_mpi_ai_get_vqe_attr) 增加音频编解码mapi接口函数 | 孙小朋/崔妍 | 2023/4/27 |
+| V1.3 | 1)增加内置Audio Codec API接口 | 孙小朋 | 2023/5/10 |
+| v1.4 | 1)i2s支持单双声道输入和输出,修改[k_audio_i2s_attr](#3110-k_audio_i2s_attr)属性,增加snd_mode属性。 2)增加内置Audio Codec API接口:包括音量获取和复位相关接口:[k_acodec_get_gain_micl](#257-k_acodec_get_gain_hpoutl)/[k_acodec_get_gain_micr](#2516-k_acodec_get_gain_micr)/[k_acodec_get_adcl_volume](#2518-k_acodec_get_adcl_volume)/[k_acodec_get_adcr_volume](#2519-k_acodec_get_adcr_volume)/[k_acodec_get_alc_gain_micl](#255-k_acodec_get_alc_gain_micl)/[k_acodec_get_alc_gain_micr](#256-k_acodec_get_alc_gain_micr)/[k_acodec_get_gain_hpoutl](#257-k_acodec_get_gain_hpoutl)/[k_acodec_get_gain_hpoutr](#258-k_acodec_get_gain_hpoutr)/[k_acodec_get_dacl_volume](#259-k_acodec_get_dacl_volume)/[k_acodec_get_dacr_volume](#2510-k_acodec_get_dacr_volume)/[k_acodec_reset](#2510-k_acodec_reset) | 孙小朋 | 2023/6/15 |
+
+## 1. 概述
+
+### 1.1 概述
+
+音频模块包括音频输入ai、音频输出ao、音频编码aenc、音频解码adec四个子模块以及对内置模拟audio codec的支持。音频输入模块包括i2s和pdm两种音频接口,配合pdma做内存拷贝,支持数字麦(pdm/i2s)和模拟audio codec(i2s)声源输入,内置模拟audio codec,支持对音频数据进行声音质量增强(VQE)处理:3A(AEC回声消除、ANR降噪、AGC自动增益)。音频输出模块支持i2s音频接口,配合pdma做内存拷贝,可外接数据喇叭或模拟audio codec作为声音输出。音频编码和解码模块暂支持对 G711格式的音频编解码功能,并支持外部编解码器的注册。
+
+将音频模块拆分成多个子模块,模块间以低耦合的方式实现数据流的互传,这样的设计足以满足MAIX3下现有的多媒体业务。下图仅以语音对讲业务场景下音频模块使用方式来做分析。通过音频输入模块将采集到的音频数据通过音频编码模块编码后通过网络发送到远端,从远端获取到的音频编码数据经过音频解码模块解码后经音频输出模块即可播放远端声音。
+
+
+
+### 1.2 功能描述
+
+#### 1.2.1 音频输入
+
+音频输入模块(AI)主要实现配置及启用音频输入设备、获取音频帧数据等功能。
+
+音频输入模块支持I2s和pdm协议接口。i2s 支持同时采集最多2路双声道音频,pdm支持同时采集最多8路单声道音频。详细的i2s、pdm特性如下:
+
+- I2s音频接口
+
+ 1. 数据采样率支持8kHz/12kHz/16kHz/24kHz/32kHz/44.1kHz/48kHz/96kHz/192kHz,采样精度支持16/24/32bit。
+
+ 1. 支持2组可配置IO用于输入/输出I2S音频数据,支持全双工模式。
+
+- pdm音频接口
+
+ 1. 支持PDM音频输入,1bit位宽,采样时钟频率为0.256MHz/0.384MHz/0.512MHz/0.768MHz/1.024MHz/1.4112MHz/1.536MHz/2.048MHz/2.8224MHz/3.072MHz/4.096MHz/5.6448MHz/6.144MHz/12.288MHz/24.576MHz,输入的PCM音频采样率为8kHz/12kHz/16kHz/24kHz/32kHz/44.1kHz/48kHz/96kHz/192kHz。采样精度支持16/24/32bit.
+
+ 1. 支持过采样率128、64、32倍过采样。
+
+ 1. 支持1-4个IO用于输入PDM音频数据。
+
+ 1. 输入支持可配置1-8个PDM声道,支持PDM左右单声道模式和双声道模式,各IO声道模式统一,PDM双声道模式最多使用4个IO
+
+ 1. 使能的声道序号从小到大并且连续,不支持各声道随机使能
+
+#### 1.2.2 音频输出
+
+音频输出(AO)主要实现启用音频输出设备、发送音频帧到输出通道等功能。
+
+音频输出模块支持I2s协议接口。i2s 支持同时输出最多2路双声道音频。
+
+- i2s音频接口
+
+ 1. 数据采样率支持8kHz/12kHz/16kHz/24kHz/32kHz/44.1kHz/48kHz/96kHz/192kHz,采样精度16/24/32bit。
+
+ 1. 支持2组可配置IO用于输入/输出I2S音频数据,支持全双工模式。
+
+#### 1.2.3 音频链路
+
+- audio codec从模拟麦克风接收到的信号,转变为I2S格式的PCM数据后,输入到audio中的I2S中;I2S输出的PCM数据,经过audio codec后,变为模拟信号发出,该模式不使用数字IO,固定使用I2S的sdi0和sdo0接口。
+
+- I2S的直接与片外的数字麦克风和PA连接。共有两组接口可以选择:sdi0、sdo0及sdi1、sdo1。
+
+- 片外的PDM麦克风,输入最多8路PDM数据到audio的4个输入数据接口。
+
+可供选择得链路包括:
+
+- 3组pdm_in + 1组i2s_in + 2组i2s out,其中1组i2s_in可以使用内置audio codec或片外
+
+- 4组pdm_in + 2组i2s out
+
+- 2组i2s_in + 2组 pdm_in + 2组i2s out
+
+可以使用内置codec或外接设备(音频子板)来测试音频相关功能。使用内置codec可以测试一组I2S音频输入和输出及audio codec相关功能,使用音频子板可以测试2组i2s音频输入输出和4组pdm音频输入功能。
+
+
+
+#### 1.2.4 声音质量增强
+
+音频模块支持对音频数据进行声音质量增强处理,实现音频3A功能。目前支持的采样精度为16bit,支持的采样率为16k。
+
+## 2. API 参考
+
+### 2.1 音频输入
+
+该功能模块提供以下API:
+
+- [kd_mpi_ai_set_pub_attr](#211-kd_mpi_ai_set_pub_attr)
+- [kd_mpi_ai_get_pub_attr](#212-kd_mpi_ai_get_pub_attr)
+- [kd_mpi_ai_enable](#213-kd_mpi_ai_enable)
+- [kd_mpi_ai_disable](#214-kd_mpi_ai_disable)
+- [kd_mpi_ai_enable_chn](#215-kd_mpi_ai_enable_chn)
+- [kd_mpi_ai_disable_chn](#215-kd_mpi_ai_enable_chn)
+- [kd_mpi_ai_get_frame](#217-kd_mpi_ai_get_frame)
+- [kd_mpi_ai_release_frame](#218-kd_mpi_ai_release_frame)
+- [kd_mpi_ai_set_vqe_attr](#219-kd_mpi_ai_set_vqe_attr)
+- [kd_mpi_ai_get_vqe_attr](#2110-kd_mpi_ai_get_vqe_attr)
+
+#### 2.1.1 kd_mpi_ai_set_pub_attr
+
+【描述】
+
+设置AI设备属性。
+
+【语法】
+
+k_s32 kd_mpi_ai_set_pub_attr([k_audio_dev](#312-k_audio_dev) ai_dev, const [k_aio_dev_attr](#3112-k_aio_dev_attr) \*attr);
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|-------------------|-----------|
+| ai_dev | 音频设备号。 | 输入 |
+| attr | AI设备属性指针。 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+【需求】
+
+- 头文件:mpi_ai_api.h
+- 库文件:libai.a
+
+【注意】
+
+无
+
+【举例】
+
+```c
+k_aio_dev_attr aio_dev_attr;
+aio_dev_attr.audio_type = KD_AUDIO_INPUT_TYPE_I2S;
+aio_dev_attr.kd_audio_attr.i2s_attr.sample_rate = 44100;
+aio_dev_attr.kd_audio_attr.i2s_attr.bit_width = KD_AUDIO_BIT_WIDTH_16
+aio_dev_attr.kd_audio_attr.i2s_attr.chn_cnt = 2;
+aio_dev_attr.kd_audio_attr.i2s_attr.i2s_mode = K_STANDARD_MODE;
+aio_dev_attr.kd_audio_attr.i2s_attr.frame_num = 25;
+aio_dev_attr.kd_audio_attr.i2s_attr.point_num_per_frame = 44100/25;
+aio_dev_attr.kd_audio_attr.i2s_attr.i2s_type = K_AIO_I2STYPE_INNERCODEC;
+if (K_SUCCESS != kd_mpi_ai_set_pub_attr(0, &aio_dev_attr))
+{
+printf("kd_mpi_ai_set_pub_attr failed\n");
+return K_FAILED;
+}
+if (K_SUCCESS != kd_mpi_ai_enable(0))
+{
+printf("kd_mpi_ai_set_pub_attr failed\n");
+return K_FAILED;
+}
+if (K_SUCCESS != kd_mpi_ai_enable_chn(0, 0))
+{
+printf("kd_mpi_ai_set_pub_attr failed\n");
+return K_FAILED;
+}
+```
+
+#### 2.1.2 kd_mpi_ai_get_pub_attr
+
+【描述】
+
+获取AI设备属性。
+
+【语法】
+
+k_s32 kd_mpi_ai_get_pub_attr([k_audio_dev](#312-k_audio_dev) ai_dev, [k_aio_dev_attr](#3112-k_aio_dev_attr) \*attr);
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|------------------|-----------|
+| ai_dev | 音频设备号。 | 输入 |
+| attr | AI设备属性指针。 | 输出 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+【需求】
+
+- 头文件:mpi_ai_api.h
+- 库文件:libai.a
+
+#### 2.1.3 kd_mpi_ai_enable
+
+【描述】
+
+使能ai设备。
+
+【语法】
+
+k_s32 kd_mpi_ai_enable([k_audio_dev](#312-k_audio_dev) ai_dev);
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|---------------|-----------|
+| ai_dev | 音频设备号。 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+【需求】
+
+- 头文件:mpi_ai_api.h
+- 库文件:libai.a
+
+#### 2.1.4 kd_mpi_ai_disable
+
+【描述】
+
+禁用ai设备。
+
+【语法】
+
+k_s32 kd_mpi_ai_disable([k_audio_dev](#312-k_audio_dev) ai_dev);
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|---------------|-----------|
+| ai_dev | 音频设备号。 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+【需求】
+
+- 头文件:mpi_ai_api.h
+- 库文件:libai.a
+
+#### 2.1.5 kd_mpi_ai_enable_chn
+
+【描述】
+
+使能ai通道。
+
+【语法】
+
+k_s32 kd_mpi_ai_enable_chn([k_audio_dev](#312-k_audio_dev) ai_dev,[k_ai_chn](#313-k_ai_chn) ai_chn);
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|---------------|-----------|
+| ai_dev | 音频设备号。 | 输入 |
+| ai_chn | 音频通道号。 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+【需求】
+
+- 头文件:mpi_ai_api.h
+- 库文件:libai.a
+
+#### 2.1.6 kd_mpi_ai_disable_chn
+
+【描述】
+
+禁用ai通道。
+
+【语法】
+
+k_s32 kd_mpi_ai_disable_chn([k_audio_dev](#312-k_audio_dev) ai_dev,[k_ai_chn](#313-k_ai_chn) ai_chn);
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|---------------|-----------|
+| ai_dev | 音频设备号。 | 输入 |
+| ai_chn | 音频通道号。 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+【需求】
+
+- 头文件:mpi_ai_api.h
+- 库文件:libai.a
+
+#### 2.1.7 kd_mpi_ai_get_frame
+
+【描述】
+
+获取音频帧。
+
+【语法】
+
+k_s32 kd_mpi_ai_get_frame([k_audio_dev](#312-k_audio_dev) ai_dev,[k_ai_chn](#313-k_ai_chn) ai_chn,[k_audio_frame](#3114-k_audio_frame)\*frame, k_u32 milli_sec);
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|-----------|---------------------------------------------------------------------------------------------------------------------------------------------|-----------|
+| ai_dev | 音频设备号。 | 输入 |
+| ai_chn | 音频通道号。 | 输入 |
+| frame | 音频帧数据。 | 输出 |
+| milli_sec | 获取数据的超时时间。 -1表示阻塞模式,无数据时一直等待; 0表示非阻塞模式,无数据时则报错返回; >0表示阻塞milli_sec毫秒,超时则报错返回。 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+【需求】
+
+- 头文件:mpi_ai_api.h
+- 库文件:libai.a
+
+【注意】
+
+- milli_sec的值必须大于等于-1,等于-1时采用阻塞模式获取数据,等于0时采用非
+
+阻塞模式获取数据,大于0时,阻塞milli_sec毫秒后,没有数据则返回超时并报错。
+
+- 获取音频帧数据前,必须先使能对应的AI通道。
+
+【举例】
+
+```c
+k_audio_frame audio_frame;
+while(true)
+{
+//get frame
+if (K_SUCCESS != kd_mpi_ai_get_frame(dev_num, channel, &audio_frame, 1000))
+{
+printf("=========kd_mpi_ai_get_frame timeout\n");
+continue ;
+}
+//process frame
+process_frame(&audio_frame);
+//release frame
+kd_mpi_ai_release_frame(dev_num, channel, &audio_frame);
+}
+```
+
+#### 2.1.8 kd_mpi_ai_release_frame
+
+【描述】
+
+释放音频帧。
+
+【语法】
+
+k_s32 kd_mpi_ai_release_frame([k_audio_dev](#312-k_audio_dev) ai_dev,[k_ai_chn](#313-k_ai_chn) ai_chn,const [k_audio_frame](#3114-k_audio_frame) *frame);【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|---------------|-----------|
+| ai_dev | 音频设备号。 | 输入 |
+| ai_chn | 音频通道号。 | 输入 |
+| frame | 音频帧数据。 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+【需求】
+
+- 头文件:mpi_ai_api.h
+- 库文件:libai.a
+
+#### 2.1.9 kd_mpi_ai_set_vqe_attr
+
+【描述】
+
+设置AI的声音质量增强功能相关属性。
+
+【语法】
+
+k_s32 kd_mpi_ai_set_vqe_attr([k_audio_dev](#312-k_audio_dev) ai_dev, [k_ai_chn](#313-k_ai_chn) ai_chn, const k_bool \*vqe_enable);
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|------------|-----------------------------------------------------------|-----------|
+| ai_dev | 音频设备号。 | 输入 |
+| ai_chn | 音频通道号。 | 输入 |
+| vqe_enable | 声音质量增强使能标志位。 K_TRUE:使能。 K_FALSE:不使能。 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+【需求】
+
+- 头文件:mpi_ai_api.h
+
+库文件:libai.a
+
+【注意】
+
+目前支持的采样精度为16bit,支持的采样率为8k和16k。
+
+#### 2.1.10 kd_mpi_ai_get_vqe_attr
+
+【描述】
+
+获取AI的声音质量增强功能相关属性。
+
+【语法】
+
+k_s32 kd_mpi_ai_get_vqe_attr([k_audio_dev](#312-k_audio_dev) ai_dev, [k_ai_chn](#313-k_ai_chn) ai_chn, k_bool \*vqe_enable);
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|------------|---------------------------------------------------------------|-----------|
+| ai_dev | 音频设备号。 | 输入 |
+| ai_chn | 音频通道号。 | 输入 |
+| vqe_enable | 声音质量增强使能标志位指针。 K_TRUE:使能。 K_FALSE:不使能。 | 输出 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+【需求】
+
+- 头文件:mpi_ai_api.h
+- 库文件:libai.a
+
+### 2.2 音频输出
+
+该功能模块提供以下API:
+
+- [kd_mpi_ao_set_pub_attr](#221-kd_mpi_ao_set_pub_attr)
+- [kd_mpi_ao_get_pub_attr](#212-kd_mpi_ai_get_pub_attr)
+- [kd_mpi_ao_enable](#223-kd_mpi_ao_enable)
+- [kd_mpi_ao_disable](#224-kd_mpi_ao_disable)
+- [kd_mpi_ao_enable_chn](#225-kd_mpi_ao_enable_chn)
+- [kd_mpi_ao_disable_chn](#226-kd_mpi_ao_disable_chn)
+- [kd_mpi_ao_send_frame](#227-kd_mpi_ao_send_frame)
+
+#### 2.2.1 kd_mpi_ao_set_pub_attr
+
+【描述】
+
+设置AO设备属性。
+
+【语法】
+
+k_s32 kd_mpi_ao_set_pub_attr([k_audio_dev](#312-k_audio_dev) ao_dev, const [k_aio_dev_attr](#3112-k_aio_dev_attr) *attr);
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|-------------------|-----------|
+| ao_dev | 音频设备号。 | 输入 |
+| attr | AO设备属性指针。 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+【需求】
+
+- 头文件:mpi_ao_api.h
+- 库文件:libao.a
+
+【注意】
+
+无
+
+【举例】
+
+```c
+k_aio_dev_attr ao_dev_attr;
+ao_dev_attr.audio_type = KD_AUDIO_OUTPUT_TYPE_I2S;
+ao_dev_attr.kd_audio_attr.i2s_attr.sample_rate = 48000;
+ao_dev_attr.kd_audio_attr.i2s_attr.bit_width = KD_AUDIO_BIT_WIDTH_24;
+ao_dev_attr.kd_audio_attr.i2s_attr.chn_cnt = 2;
+ao_dev_attr.kd_audio_attr.i2s_attr.i2s_mode = K_RIGHT_JUSTIFYING_MODE;
+ao_dev_attr.kd_audio_attr.i2s_attr.frame_num = 15;
+ao_dev_attr.kd_audio_attr.i2s_attr.point_num_per_frame = 48000/25;
+ao_dev_attr.kd_audio_attr.i2s_attr.i2s_type = K_AIO_I2STYPE_EXTERN;
+if (K_SUCCESS != kd_mpi_ao_set_pub_attr(0, &ao_dev_attr))
+{
+printf("kd_mpi_ao_set_pub_attr failed\n");
+return K_FAILED;
+}
+
+if (K_SUCCESS != kd_mpi_ai_enable(0))
+{
+printf("kd_mpi_ai_enable failed\n");
+return K_FAILED;
+}
+
+if (K_SUCCESS != kd_mpi_ai_enable_chn(0,1))
+{
+printf("kd_mpi_ai_enable_chn failed\n");
+return K_FAILED;
+}
+```
+
+#### 2.2.2 kd_mpi_ao_get_pub_attr
+
+【描述】
+
+获取AO设备属性。
+
+【语法】
+
+k_s32 kd_mpi_ao_get_pub_attr([k_audio_dev](#312-k_audio_dev) ao_dev, [k_aio_dev_attr](#3112-k_aio_dev_attr) *attr);
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|------------------|-----------|
+| ao_dev | 音频设备号。 | 输入 |
+| attr | AO设备属性指针。 | 输出 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+【需求】
+
+- 头文件:mpi_ao_api.h
+- 库文件:libao.a
+
+#### 2.2.3 kd_mpi_ao_enable
+
+【描述】
+
+使能ao设备。
+
+【语法】
+
+k_s32 kd_mpi_ao_enable([k_audio_dev](#312-k_audio_dev) ao_dev);
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|---------------|-----------|
+| ao_dev | 音频设备号。 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+【需求】
+
+- 头文件:mpi_ao_api.h
+- 库文件:libao.a
+
+#### 2.2.4 kd_mpi_ao_disable
+
+【描述】
+
+禁用ao设备。
+
+【语法】
+
+k_s32 kd_mpi_ao_disable([k_audio_dev](#312-k_audio_dev) ao_dev);
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|---------------|-----------|
+| ao_dev | 音频设备号。 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+【需求】
+
+- 头文件:mpi_ao_api.h
+- 库文件:libao.a
+
+#### 2.2.5 kd_mpi_ao_enable_chn
+
+【描述】
+
+使能ao通道。
+
+【语法】
+
+k_s32 kd_mpi_ao_enable_chn([k_audio_dev](#312-k_audio_dev) ao_dev,[k_ao_chn](#314-k_ao_chn) ao_chn);
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|---------------|-----------|
+| ao_dev | 音频设备号。 | 输入 |
+| ao_chn | 音频通道号。 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+【需求】
+
+- 头文件:mpi_ao_api.h
+- 库文件:libao.a
+
+#### 2.2.6 kd_mpi_ao_disable_chn
+
+【描述】
+
+禁用ao通道。
+
+【语法】
+
+k_s32 kd_mpi_ao_disable_chn([k_audio_dev](#312-k_audio_dev) ao_dev,[k_ao_chn](#314-k_ao_chn) ao_chn);
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|---------------|-----------|
+| ao_dev | 音频设备号。 | 输入 |
+| ao_chn | 音频通道号。 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+【需求】
+
+- 头文件:mpi_ao_api.h
+- 库文件:libao.a
+
+#### 2.2.7 kd_mpi_ao_send_frame
+
+【描述】
+
+发送ao帧数据。
+
+【语法】
+
+k_s32 kd_mpi_ao_send_frame
+
+([k_audio_dev](#312-k_audio_dev) ao_dev,[k_ao_chn](#314-k_ao_chn) ao_chn,const [k_audio_frame](#3114-k_audio_frame)*frame,k_s32 milli_sec);
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|-----------|---------------------------------------------------------------------------------------------------------------------------------------------|-----------|
+| ao_dev | 音频设备号。 | 输入 |
+| ao_chn | 音频通道号。 | 输入 |
+| frame | 音频帧数据指针。 | 输入 |
+| milli_sec | 发送数据的超时时间。 -1表示阻塞模式,无数据时一直等待; 0表示非阻塞模式,无数据时则报错返回; >0表示阻塞milli_sec毫秒,超时则报错返回。 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+【需求】
+
+- 头文件:mpi_ai_api.h
+- 库文件:libai.a
+
+【注意】
+
+- milli_sec的值必须大于等于-1,等于-1时采用阻塞模式获取数据,等于0时采用非
+
+阻塞模式获取数据,大于0时,阻塞milli_sec毫秒后,没有数据则返回超时并报错。
+
+- 发送音频帧数据前,必须先使能对应的AO通道。
+
+【举例】
+
+```c
+k_audio_frame audio_frame;
+k_s32 ret = 0;
+while (true)
+{
+//get ai frame
+ret = kd_mpi_ai_get_frame(0, 0, &audio_frame, 1000);
+if (K_SUCCESS != ret)
+{
+printf("=========kd_mpi_ai_get_frame timeout\n");
+continue ;
+}
+//send ai frame to ao
+ret = kd_mpi_ao_send_frame(0, 1, &audio_frame, 0);
+if (K_SUCCESS != ret)
+{
+printf("=======kd_mpi_ao_send_frame failed\n");
+}
+//release ai frame
+kd_mpi_ai_release_frame(0, 0, &audio_frame);
+}
+```
+
+### 2.3 音频编码
+
+音频编码主要实现创建编码通道、发送音频帧编码及获取编码码流等功能。音频编码部分,提供g711a/u编码,暂只支持16bit采样精度。
+
+该功能模块提供以下API:
+
+- [kd_mpi_aenc_register_encoder](#231-kd_mpi_aenc_register_encoder):注册编码器。
+- [kd_mpi_aenc_unregister_encoder](#232-kd_mpi_aenc_unregister_encoder):注销编码器。
+- [kd_mpi_aenc_create_chn](#233-kd_mpi_aenc_create_chn):创建编码通道
+- [kd_mpi_aenc_destroy_chn](#234-kd_mpi_aenc_destroy_chn):销毁编码通道
+- [kd_mpi_aenc_send_frame](#235-kd_mpi_aenc_send_frame):发送音频编码音频帧
+- [kd_mpi_aenc_get_stream](#236-kd_mpi_aenc_get_stream):获取音频编码码流
+- [kd_mpi_aenc_release_stream](#237-kd_mpi_aenc_release_stream):释放音频编码码流
+
+#### 2.3.1 kd_mpi_aenc_register_encoder
+
+- 【描述】
+
+注册编码器。
+
+- 【语法】
+
+k_s32 kd_mpi_aenc_register_encoder(k_s32 \*handle, const [k_aenc_encoder](#322-k_aenc_encoder) \*encoder);
+
+- 【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+|--------------|--------------------|---------------|
+| handle | 注册句柄。 | 输出 |
+| encoder | 编码器属性结构体。 | 输入 |
+
+- 【说明】
+
+用户通过传入编码器属性结构体,向 AENC 模块注册一个编码器,并返回注册句
+
+柄,用户可以最后通过注册句柄来注销该编码器。
+
+AENC 模块最大可注册 20 个编码器,且自身已注册 G711.a、G711.u
+
+两个编码器。
+
+同一种编码协议不允许重复注册编码器,例如假如已注册 G711 编码器,不允许另
+
+外再注册一个 G711 编码器
+
+- 【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+【需求】
+
+- 头文件:mpi_aenc_api.h
+- 库文件:libaenc.a
+
+#### 2.3.2 kd_mpi_aenc_unregister_encoder
+
+- 【描述】
+
+注销编码器。
+
+- 【语法】
+
+k_s32 kd_mpi_aenc_unregister_encoder(k_s32 handle);
+
+- 【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+|--------------|-------------|---------------|
+| handle | 注销句柄。 | 输入 |
+
+- 【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+【需求】
+
+- 头文件:mpi_aenc_api.h
+- 库文件:libaenc.a
+
+#### 2.3.3 kd_mpi_aenc_create_chn
+
+- 【描述】
+
+创建音频编码通道。
+
+- 【语法】
+
+k_s32 kd_mpi_aenc_create_chn([k_aenc_chn](#326-k_aenc_chn) aenc_chn, const [k_aenc_chn_attr](#323-k_aenc_chn_attr) \*attr);
+
+| **参数名称** | **描述** | **输入/输出** |
+|--------------|--------------------------------------------------------------------|---------------|
+| aenc_chn | 通道号。 取值范围: [0, [AENC_MAX_CHN_NUM](#324-aenc_max_chn_nums))。 | 输入 |
+| attr | 音频编码通道属性指针。 | 输入 |
+
+- 【说明】
+
+buffer 大小以帧为单位,取值范围是[2, [K_MAX_AUDIO_FRAME_NUM](#315-k_max_audio_frame_num),建议配置 为 10 以上,过小的 buffer 配置可能导致丢帧等异常。每个编码通道都会根据buffer大小来配置队列大小,用以缓存编码帧数据。
+
+- 【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+【需求】
+
+- 头文件:mpi_aenc_api.h
+- 库文件:libaenc.a
+
+#### 2.3.4 kd_mpi_aenc_destroy_chn
+
+- 【描述】
+
+销毁音频编码通道。
+
+- 【语法】
+
+k_s32 kd_mpi_aenc_destroy_chn([k_aenc_chn](#326-k_aenc_chn) aenc_chn);
+
+| **参数名称** | **描述** | **输入/输出** |
+|--------------|--------------------------------------------------------------------|---------------|
+| aenc_chn | 通道号。 取值范围: [0, [AENC_MAX_CHN_NUM](#324-aenc_max_chn_nums))。 | 输入 |
+
+- 【说明】
+
+无
+
+- 【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+【需求】
+
+- 头文件:mpi_aenc_api.h
+- 库文件:libaenc.a
+
+#### 2.3.5 kd_mpi_aenc_send_frame
+
+- 【描述】
+
+发送音频编码帧。
+
+- 【语法】
+
+k_s32 kd_mpi_aenc_send_frame([k_aenc_chn](#326-k_aenc_chn) aenc_chn,const [k_audio_frame](#3114-k_audio_frame) \*frame);
+
+- 【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+|--------------|---------------------------------------------------|---------------|
+| aenc_chn | 通道号。 取值范围:[0, AENC_MAX_CHN_NUM)。 输入 | 输入 |
+| frame | 音频帧结构体指针。 | 输入 |
+
+- 【说明】
+
+音频编码发送码流是非阻塞接口,如果音频码流缓存满,则直接返回失败。该接口用于用户主动发送音频帧进行编码,如果 AENC 通道已经通过系统绑定接口与 AI 绑定,不需要也不建议调此接口。调用该接口发送音频编码音频帧时,必须先创建对应的编码通道。
+
+- 【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+【需求】
+
+- 头文件:mpi_aenc_api.h
+- 库文件:libaenc.a
+
+#### 2.3.6 kd_mpi_aenc_get_stream
+
+- 【描述】
+
+获取音频编码码流。
+
+- 【语法】
+
+k_s32 kd_mpi_aenc_get_stream([k_aenc_chn](#326-k_aenc_chn) aenc_chn, [k_audio_stream](#327-k_audio_stream) \*stream, k_s32 milli_sec);
+
+- 【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+|--------------|---------------------------------------------------------------------------------------------------------------------------------------------------|---------------|
+| aenc_chn | 通道号。 取值范围:[0, AENC_MAX_CHN_NUM)。 | 输入 |
+| stream | 获取的音频码流。 | 输出 |
+| milli_sec | 获取数据的超时时间 -1 表示阻塞模式,无数据时一直等待; 0 表示非阻塞模式,无数据时则报错返回; \>0 表示阻塞 s32MilliSec 毫秒,超时则报错返回。 | 输入 |
+
+- 【说明】
+
+必须创建通道后才可能获取码流,否则直接返回失败,如果在获取码流过程中销
+
+毁通道则会立刻返回失败。
+
+s32MilliSec 的值必须大于等于-1,等于-1 时采用阻塞模式获取数据,等于 0 时采
+
+用非阻塞模式获取数据,大于 0 时,阻塞 s32MilliSec 毫秒后,没有数据则返回超
+
+时并报错。
+
+- 【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+【需求】
+
+- 头文件:mpi_aenc_api.h
+- 库文件:libaenc.a
+
+#### 2.3.7 kd_mpi_aenc_release_stream
+
+- 【描述】
+
+释放音频编码码流。
+
+- 【语法】
+
+k_s32 kd_mpi_aenc_release_stream([k_aenc_chn](#326-k_aenc_chn) aenc_chn, const [k_audio_stream](#327-k_audio_stream) \*stream);
+
+- 【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+|--------------|----------------------------------------------|---------------|
+| aenc_chn | 通道号。 取值范围:[0, AENC_MAX_CHN_NUM)。 | 输入 |
+| stream | 获取的音频码流。 | 输出 |
+
+- 【说明】
+
+无
+
+- 【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+【需求】
+
+- 头文件:mpi_aenc_api.h
+- 库文件:libaenc.a
+
+### 2.4 音频解码
+
+音频解码主要实现解码通道、发送音频码流解码及获取解码后音频帧等功能。
+
+音频编解码部分,提供g711a/u解码,暂支持16bit采样精度。
+
+该功能模块提供以下API:
+
+- [kd_mpi_adec_register_decoder](#241-kd_mpi_adec_register_decoder):注册解码器
+- [kd_mpi_adec_unregister_decoder](#242-kd_mpi_adec_unregister_decoder):注销解码器
+- [kd_mpi_adec_create_chn](#243-kd_mpi_adec_create_chn):创建音频解码通道
+- [kd_mpi_adec_destroy_chn](#244-kd_mpi_adec_destroy_chn):销毁音频解码通道
+- [kd_mpi_adec_send_stream](#245-kd_mpi_adec_send_stream):发送音频码流到音频解码通道
+- [kd_mpi_adec_clr_chn_buf](#246-kd_mpi_adec_clr_chn_buf):清除 ADEC 通道中当前的音频数据缓存。
+- [kd_mpi_adec_get_frame](#247-kd_mpi_adec_get_frame):获取音频解码帧数据
+- [kd_mpi_adec_release_frame](#248-kd_mpi_adec_release_frame):释放音频解码帧数据
+
+#### 2.4.1 kd_mpi_adec_register_decoder
+
+- 【描述】
+
+注册解码器。
+
+- 【语法】
+
+k_s32 kd_mpi_adec_register_decoder(k_s32 \*handle, const [k_adec_decoder](#329-k_adec_decoder) \*decoder);
+
+- 【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+|--------------|--------------------|---------------|
+| handle | 注册句柄。 | 输出 |
+| decoder | 解码器属性结构体。 | 输入 |
+
+- 【说明】
+
+用户通过传入解码器属性结构体,向 ADEC 模块注册一个解码器,并返回注册句柄,用户可以最后通过注册句柄来注销该解码器。 ADEC 模块最大可注册 20 个解码器,且自身已注册 G711a、G711u两个解码器。 同一种解码协议不允许重复注册解码器,例如假如已注册 G711 解码器,不允许另外再注册一个 G711 解码器。
+
+- 【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+【需求】
+
+头文件:mpi_adec_api.h
+
+库文件:libadec.a
+
+#### 2.4.2 kd_mpi_adec_unregister_decoder
+
+- 【描述】
+
+注销解码器。
+
+- 【语法】
+
+k_s32 kd_mpi_adec_unregister_decoder(k_s32 handle);
+
+- 【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+|--------------|-------------|---------------|
+| handle | 注销句柄。 | 输入 |
+
+- 【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+- 【需求】
+- 头文件:mpi_adec_api.h
+- 库文件:libadec.a
+
+#### 2.4.3 kd_mpi_adec_create_chn
+
+- 【描述】
+
+创建音频解码通道。
+
+- 【语法】
+
+k_s32 kd_mpi_adec_create_chn([k_adec_chn](#3212-k_adec_chn) adec_chn, const [k_adec_chn_attr](#328-k_adec_chn_attr) \*attr);
+
+- 【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+|--------------|---------------------------------------------------------------------|---------------|
+| adec_chn | 通道号。 取值范围:[0, [ADEC_MAX_CHN_NUM](#3211-adec_max_chn_nums))。 | 输入 |
+| attr | 通道属性指针。 | 输入 |
+
+- 【说明】
+
+协议类型指定了该通道的解码协议,目前支持 G711。音频解码的部分属性需要与输出设备属性相匹配,例如采样率、帧长(每帧采样点数目)等。 buffer 大小以帧为单位,取值范围是[2, [K_MAX_AUDIO_FRAME_NUM](#315-k_max_audio_frame_num),建议配置为 10 以上,过小的 buffer 配置可能导致丢帧等异常。 在通道未创建前(或销毁后)才能使用此接口,如果通道已经被创建,则返回通道已经创建。
+
+- 【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+【需求】
+
+头文件:mpi_adec_api.h
+
+库文件:libadec.a
+
+#### 2.4.4 kd_mpi_adec_destroy_chn
+
+- 【描述】
+
+销毁音频解码通道。
+
+- 【语法】
+
+k_s32 kd_mpi_adec_destroy_chn([k_adec_chn](#3212-k_adec_chn) adec_chn);
+
+- 【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+|--------------|--------------------------------------------------------------------|---------------|
+| adec_chn | 通道号。 取值范围: [0, [ADEC_MAX_CHN_NUM](#3211-adec_max_chn_nums))。 | 输入 |
+
+- 【说明】
+
+无
+
+- 【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+- 【需求】
+- 头文件:mpi_adec_api.h
+- 库文件:libadec.a
+
+#### 2.4.5 kd_mpi_adec_send_stream
+
+- 【描述】
+
+发送音频码流到音频解码通道。
+
+- 【语法】
+
+k_s32 kd_mpi_adec_send_stream(k_adec_chn adec_chn,const k_audio_stream \*stream,k_bool block);
+
+- 【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+|--------------|--------------------------------------------------|---------------|
+| adec_chn | 通道号。 取值范围:[0, [ADEC_MAX_CHN_NUM](#3211-adec_max_chn_nums))。 | 输入 |
+| stream | 音频码流。 | 输入 |
+| block | 阻塞标识。 HI_TRUE:阻塞。 HI_FALSE:非阻塞。 | 输入 |
+
+- 【说明】
+
+发送数据时必须保证通道已经被创建,否则直接返回失败,如果在送数据过程中 销毁通道则会立刻返回失败。 支持阻塞或非阻塞方式发送码流。 当阻塞方式发送码流时,如果用于缓存解码后的音频帧的 Buffer 满,则此接口调用会被阻塞,直至解码后的音频帧数据被取走,或 ADEC 通道被销毁。
+
+- 【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+- 【需求】
+
+头文件:mpi_adec_api.h
+
+库文件:libadec.a
+
+#### 2.4.6 kd_mpi_adec_clr_chn_buf
+
+- 【描述】
+
+清除ADEC通道中当前的音频数据缓存。
+
+- 【语法】
+
+k_s32 kd_mpi_adec_clr_chn_buf([k_adec_chn](#3212-k_adec_chn) adec_chn);
+
+- 【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+|--------------|--------------------------------------------------------------------|---------------|
+| adec_chn | 通道号。 取值范围: [0, [ADEC_MAX_CHN_NUM](#3211-adec_max_chn_nums))。 | 输入 |
+
+- 【说明】
+
+要求解码通道已经被创建,如果通道未被创建则返回通道不存在错误码。
+
+- 【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+- 【需求】
+
+头文件:mpi_adec_api.h
+
+库文件:libadec.a
+
+#### 2.4.7 kd_mpi_adec_get_frame
+
+- 【描述】
+
+获取音频解码帧数据。
+
+- 【语法】
+
+k_s32 kd_mpi_adec_get_frame([k_adec_chn](#3212-k_adec_chn) adec_chn, [k_audio_frame](#3114-k_audio_frame) \*frame, k_s32 milli_sec);
+
+- 【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+|--------------|--------------------------|---------------|
+| adec_chn | 音频解码通道。 | 输入 |
+| frame_info | 音频帧数据结构体 输出 | 输出 |
+| block | 是否以阻塞方式获取 | 输入 |
+
+- 【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+- 【需求】
+
+头文件:mpi_adec_api.h
+
+库文件:libadec.a
+
+#### 2.4.8 kd_mpi_adec_release_frame
+
+- 【描述】
+
+释放获取到的音频解码帧数据。
+
+- 【语法】
+
+k_s32 kd_mpi_adec_release_frame([k_adec_chn](#326-k_aenc_chn) adec_chn, const [k_audio_frame](#3114-k_audio_frame) \*frame);
+
+- 【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+|--------------|--------------------------|---------------|
+| adec_chn | 音频解码通道。 | 输入 |
+| frame_info | 音频帧数据结构体 输出 | 输入 |
+
+- 【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+- 【需求】
+
+头文件:mpi_adec_api.h
+
+库文件:libadec.a
+
+### 2.5 内置Audio Codec
+
+内置Audio Codec主要通过ioctl提供对硬件设备的操作。在提供的ioctl的cmd中,有些
+
+cmd用户可以不需要调用,直接使用模块加载时的默认值即可。ioctl调用实现的是对内置Audio Codec寄存器的读写。
+
+当前版本对audio codec的控制操作主要包含:adc数字和模拟音量,dac数字/模拟音量,adc/dac静音控制。其中采样率,采样精度,i2s对齐模式这些控制操作由用户通过调用ai和ao的api接口内核自动完成(内核代码自动实现对codec硬件设备操作),不再提供ioctl接口来控制。
+
+内置 Audio Codec 标准功能 cmd:
+
+- [k_acodec_set_gain_micl](#251-k_acodec_set_gain_micl):左声道输入模拟增益控制
+- [k_acodec_set_gain_micr](#252-k_acodec_set_gain_micr):右声道输入模拟增益控制
+- [k_acodec_set_adcl_volume](#253-k_acodec_set_adcl_volume):左声道输入数字音量控制
+- [k_acodec_set_adcr_volume](#254-k_acodec_set_adcr_volume):右声道输入数字音量控制
+- [k_acodec_set_alc_gain_micl](#255-k_acodec_set_alc_gain_micl):alc左声道输入的模拟增益控制
+- [k_acodec_set_alc_gain_micr](#256-k_acodec_set_alc_gain_micr):alc右声道输入的模拟增益控制
+- [k_acodec_set_gain_hpoutl](#257-k_acodec_set_gain_hpoutl):左声道输出模拟音量控制
+- [k_acodec_set_gain_hpoutr](#258-k_acodec_set_gain_hpoutr):右声道输出模拟音量控制
+- [k_acodec_set_dacl_volume](#259-k_acodec_set_dacl_volume):左声道输出数字音量控制
+- [k_acodec_set_dacr_volume](#2510-k_acodec_set_dacr_volume):右声道输出数字音量控制
+- [k_acodec_set_micl_mute](#2511-k_acodec_set_micl_mute):左声道输入静音控制
+- [k_acodec_set_micr_mute](#2512-k_acodec_set_micr_mute):右声道输入静音控制
+- [k_acodec_set_dacl_mute](#2513-k_acodec_set_dacl_mute):左声道输出静音控制
+- [k_acodec_set_dacr_mute](#2514-k_acodec_set_dacr_mute):右声道输出静音控制
+- [k_acodec_get_gain_micl](#2515-k_acodec_get_gain_micl):获取左声道输入模拟增益值
+- [k_acodec_get_gain_micr](#2516-k_acodec_get_gain_micr):获取右声道输入模拟增益值
+- [k_acodec_get_adcl_volume](#2518-k_acodec_get_adcl_volume):获取左声道输入数字音量值
+- [k_acodec_get_adcr_volume](#2519-k_acodec_get_adcr_volume):获取右声道输入数字音量值
+- [k_acodec_get_alc_gain_micl](#255-k_acodec_get_alc_gain_micl):获取alc左声道输入的模拟增益值
+- [k_acodec_get_alc_gain_micr](#256-k_acodec_get_alc_gain_micr):获取alc右声道输入的模拟增益值
+- [k_acodec_get_gain_hpoutl](#257-k_acodec_get_gain_hpoutl):获取左声道输出模拟音量值
+- [k_acodec_get_gain_hpoutr](#258-k_acodec_get_gain_hpoutr):获取右声道输出模拟音量值
+- [k_acodec_get_dacl_volume](#259-k_acodec_get_dacl_volume):获取左声道输出数字音量值
+- [k_acodec_get_dacr_volume](#2510-k_acodec_get_dacr_volume):获取右声道输出数字音量值
+- [k_acodec_reset](#2510-k_acodec_reset):音量重置
+
+#### 2.5.1 k_acodec_set_gain_micl
+
+- 【描述】
+
+左声道输入模拟增益控制
+
+- 【语法】
+
+int ioctl (int fd, k_acodec_set_gain_micl, k_u32 \*arg);
+
+- 【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+| ---------------------- | ------------------------- | ------------- |
+| fd | Audio Codec设备文件描述符 | 输入 |
+| k_acodec_set_gain_micl | ioctl号 | 输入 |
+| arg | 无符号整型指针 | 输入 |
+
+- 【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+- 【需求】
+
+头文件:k_acodec_comm.h
+
+库文件:libacodec.a
+
+- 【注意】
+
+模拟增益范围为0db,6db,20db,30db。
+
+#### 2.5.2 k_acodec_set_gain_micr
+
+- 【描述】
+
+右声道输入模拟增益控制
+
+- 【语法】
+
+int ioctl (int fd, k_acodec_set_gain_micr, k_u32 \*arg);
+
+- 【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+| ---------------------- | ------------------------- | ------------- |
+| fd | Audio Codec设备文件描述符 | 输入 |
+| k_acodec_set_gain_micr | ioctl号 | 输入 |
+| arg | 无符号整型指针 | 输入 |
+
+- 【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+- 【需求】
+
+头文件:k_acodec_comm.h
+
+库文件:libacodec.a
+
+- 【注意】
+
+模拟增益范围为0db,6db,20db,30db。
+
+#### 2.5.3 k_acodec_set_adcl_volume
+
+- 【描述】
+
+左声道输入数字增益控制。
+
+- 【语法】
+
+int ioctl (int fd, k_acodec_set_adcl_volume, float \*arg);
+
+- 【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+| ------------------------ | ------------------------- | ------------- |
+| fd | Audio Codec设备文件描述符 | 输入 |
+| k_acodec_set_adcl_volume | ioctl号 | 输入 |
+| arg | 有符号浮点型指针 | 输入 |
+
+- 【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+- 【需求】
+
+头文件:k_acodec_comm.h
+
+库文件:libacodec.a
+
+- 【注意】
+
+模拟增益范围`[-97,30]`,赋值越大,音量越大,按0.5db递增。
+
+#### 2.5.4 k_acodec_set_adcr_volume
+
+- 【描述】
+
+右声道输入数字增益控制。
+
+- 【语法】
+
+int ioctl (int fd, k_acodec_set_adcr_volume, float \*arg);
+
+- 【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+| ------------------------ | ------------------------- | ------------- |
+| fd | Audio Codec设备文件描述符 | 输入 |
+| k_acodec_set_adcr_volume | ioctl号 | 输入 |
+| arg | 有符号浮点型指针 | 输入 |
+
+- 【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+- 【需求】
+
+头文件:k_acodec_comm.h
+
+库文件:libacodec.a
+
+- 【注意】
+
+模拟增益范围`[-97,30]`,赋值越大,音量越大,按0.5db递增。
+
+#### 2.5.5 k_acodec_set_alc_gain_micl
+
+- 【描述】
+
+左声道alc输入模拟增益控制。
+
+- 【语法】
+
+int ioctl (int fd, k_acodec_set_alc_gain_micl, float \*arg);
+
+- 【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+| -------------------------- | ------------------------- | ------------- |
+| fd | Audio Codec设备文件描述符 | 输入 |
+| k_acodec_set_alc_gain_micl | ioctl号 | 输入 |
+| arg | 有符号浮点型指针 | 输入 |
+
+- 【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+- 【需求】
+
+头文件:k_acodec_comm.h
+
+库文件:libacodec.a
+
+- 【注意】
+
+模拟增益范围`[-18,28.5]`,赋值越大,音量越大,按1.5db递增。
+
+#### 2.5.6 k_acodec_set_alc_gain_micr
+
+- 【描述】
+
+右声道alc输入模拟增益控制。
+
+- 【语法】
+
+int ioctl (int fd, k_acodec_set_alc_gain_micr, float \*arg);
+
+- 【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+| -------------------------- | ------------------------- | ------------- |
+| fd | Audio Codec设备文件描述符 | 输入 |
+| k_acodec_set_alc_gain_micr | ioctl号 | 输入 |
+| arg | 有符号浮点型指针 | 输入 |
+
+- 【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+- 【需求】
+
+头文件:k_acodec_comm.h
+
+库文件:libacodec.a
+
+- 【注意】
+
+模拟增益范围`[-18,28.5]`,赋值越大,音量越大,按1.5db递增。
+
+#### 2.5.7 k_acodec_set_gain_hpoutl
+
+- 【描述】
+
+左声道输出模拟增益控制。
+
+- 【语法】
+
+int ioctl (int fd, k_acodec_set_gain_hpoutl, float \*arg);
+
+- 【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+| ------------------------ | ------------------------- | ------------- |
+| fd | Audio Codec设备文件描述符 | 输入 |
+| k_acodec_set_gain_hpoutl | ioctl号 | 输入 |
+| arg | 有符号浮点型指针 | 输入 |
+
+- 【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+- 【需求】
+
+头文件:k_acodec_comm.h
+
+库文件:libacodec.a
+
+- 【注意】
+
+模拟增益范围`[-39,6]`,赋值越大,音量越大,按1.5db递增。
+
+#### 2.5.8 k_acodec_set_gain_hpoutr
+
+- 【描述】
+
+右声道输出模拟增益控制。
+
+- 【语法】
+
+int ioctl (int fd, k_acodec_set_gain_hpoutr, float \*arg);
+
+- 【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+| ------------------------ | ------------------------- | ------------- |
+| fd | Audio Codec设备文件描述符 | 输入 |
+| k_acodec_set_gain_hpoutr | ioctl号 | 输入 |
+| arg | 有符号浮点型指针 | 输入 |
+
+- 【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+- 【需求】
+
+头文件:k_acodec_comm.h
+
+库文件:libacodec.a
+
+- 【注意】
+
+模拟增益范围`[-39,6]`,赋值越大,音量越大,按1.5db递增。
+
+#### 2.5.9 k_acodec_set_dacl_volume
+
+- 【描述】
+
+左声道输出数字增益控制。
+
+- 【语法】
+
+int ioctl (int fd, k_acodec_set_dacl_volume, float \*arg);
+
+- 【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+| ------------------------ | ------------------------- | ------------- |
+| fd | Audio Codec设备文件描述符 | 输入 |
+| k_acodec_set_dacl_volume | ioctl号 | 输入 |
+| arg | 有符号浮点型指针 | 输入 |
+
+- 【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+- 【需求】
+
+头文件:k_acodec_comm.h
+
+库文件:libacodec.a
+
+- 【注意】
+
+模拟增益范围`[-120,7]`,赋值越大,音量越大,按0.5db递增。
+
+#### 2.5.10 k_acodec_set_dacr_volume
+
+- 【描述】
+
+右声道输出数字增益控制。
+
+- 【语法】
+
+int ioctl (int fd, k_acodec_set_dacr_volume, float \*arg);
+
+- 【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+| ------------------------ | ------------------------- | ------------- |
+| fd | Audio Codec设备文件描述符 | 输入 |
+| k_acodec_set_dacr_volume | ioctl号 | 输入 |
+| arg | 有符号浮点型指针 | 输入 |
+
+- 【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+- 【需求】
+
+头文件:k_acodec_comm.h
+
+库文件:libacodec.a
+
+- 【注意】
+
+模拟增益范围`[-120,7]`,赋值越大,音量越大,按0.5db递增。
+
+#### 2.5.11 k_acodec_set_micl_mute
+
+- 【描述】
+
+左声道输入静音控制。
+
+- 【语法】
+
+int ioctl (int fd, k_acodec_set_micl_mute, k_bool \*arg);
+
+- 【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+| ---------------------- | ------------------------- | ------------- |
+| fd | Audio Codec设备文件描述符 | 输入 |
+| k_acodec_set_micl_mute | ioctl号 | 输入 |
+| arg | bool型指针 | 输入 |
+
+- 【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+- 【需求】
+
+头文件:k_acodec_comm.h
+
+库文件:libacodec.a
+
+- 【注意】
+
+取值范围:K_TRUE静音,K_FALSE取消静音。
+
+#### 2.5.12 k_acodec_set_micr_mute
+
+- 【描述】
+
+右声道输入静音控制。
+
+- 【语法】
+
+int ioctl (int fd, k_acodec_set_micr_mute, k_bool \*arg);
+
+- 【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+| ---------------------- | ------------------------- | ------------- |
+| fd | Audio Codec设备文件描述符 | 输入 |
+| k_acodec_set_micr_mute | ioctl号 | 输入 |
+| arg | bool型指针 | 输入 |
+
+- 【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+- 【需求】
+
+头文件:k_acodec_comm.h
+
+库文件:libacodec.a
+
+- 【注意】
+
+取值范围:K_TRUE静音,K_FALSE取消静音。
+
+#### 2.5.13 k_acodec_set_dacl_mute
+
+- 【描述】
+
+左声道输出静音控制。
+
+- 【语法】
+
+int ioctl (int fd, k_acodec_set_dacl_mute, k_bool \*arg);
+
+- 【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+| ---------------------- | ------------------------- | ------------- |
+| fd | Audio Codec设备文件描述符 | 输入 |
+| k_acodec_set_dacl_mute | ioctl号 | 输入 |
+| arg | bool型指针 | 输入 |
+
+- 【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+- 【需求】
+
+头文件:k_acodec_comm.h
+
+库文件:libacodec.a
+
+- 【注意】
+
+取值范围:K_TRUE静音,K_FALSE取消静音。
+
+#### 2.5.14 k_acodec_set_dacr_mute
+
+- 【描述】
+
+右声道输出静音控制。
+
+- 【语法】
+
+int ioctl (int fd, k_acodec_set_dacr_mute, k_bool \*arg);
+
+- 【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+| ---------------------- | ------------------------- | ------------- |
+| fd | Audio Codec设备文件描述符 | 输入 |
+| k_acodec_set_dacr_mute | ioctl号 | 输入 |
+| arg | bool型指针 | 输入 |
+
+- 【返回值】
+
+| 返回值 | 描述 |
+|--------|----------------------|
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+- 【需求】
+
+头文件:k_acodec_comm.h
+
+库文件:libacodec.a
+
+- 【注意】
+
+取值范围:K_TRUE静音,K_FALSE取消静音。
+
+#### 2.5.15 k_acodec_get_gain_micl
+
+- 【描述】
+
+获取左声道输入模拟增益值。
+
+- 【语法】
+
+int ioctl (int fd, k_acodec_get_gain_micl, k_u32 \*arg);
+
+- 【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+| ---------------------- | ------------------------- | ------------- |
+| fd | Audio Codec设备文件描述符 | 输入 |
+| k_acodec_get_gain_micl | ioctl号 | 输入 |
+| arg | 无符号整型指针 | 输出 |
+
+- 【返回值】
+
+| 返回值 | 描述 |
+| ------ | -------------------- |
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+- 【需求】
+
+头文件:k_acodec_comm.h
+
+库文件:libacodec.a
+
+- 【注意】
+
+获取到得模拟增益范围为0db,6db,20db,30db。
+
+#### 2.5.16 k_acodec_get_gain_micr
+
+- 【描述】
+
+获取右声道输入模拟增益值。
+
+- 【语法】
+
+int ioctl (int fd, k_acodec_get_gain_micr, k_u32 \*arg);
+
+- 【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+| ---------------------- | ------------------------- | ------------- |
+| fd | Audio Codec设备文件描述符 | 输入 |
+| k_acodec_get_gain_micr | ioctl号 | 输入 |
+| arg | 无符号整型指针 | 输出 |
+
+- 【返回值】
+
+| 返回值 | 描述 |
+| ------ | -------------------- |
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+- 【需求】
+
+头文件:k_acodec_comm.h
+
+库文件:libacodec.a
+
+- 【注意】
+
+获取到得模拟增益范围为0db,6db,20db,30db。
+
+#### 2.5.18 k_acodec_get_adcl_volume
+
+- 【描述】
+
+获取左声道输入数字音量值
+
+- 【语法】
+
+int ioctl (int fd, k_acodec_get_adcl_volume, float \*arg);
+
+- 【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+| ------------------------ | ------------------------- | ------------- |
+| fd | Audio Codec设备文件描述符 | 输入 |
+| k_acodec_get_adcl_volume | ioctl号 | 输入 |
+| arg | 有符号浮点型指针 | 输出 |
+
+- 【返回值】
+
+| 返回值 | 描述 |
+| ------ | -------------------- |
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+- 【需求】
+
+头文件:k_acodec_comm.h
+
+库文件:libacodec.a
+
+- 【注意】
+
+模拟增益范围`[-97,30]`,赋值越大,音量越大,按0.5db递增。
+
+#### 2.5.19 k_acodec_get_adcr_volume
+
+- 【描述】
+
+获取右声道输入数字增益控制值。
+
+- 【语法】
+
+int ioctl (int fd, k_acodec_get_adcr_volume, float \*arg);
+
+- 【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+| ------------------------ | ------------------------- | ------------- |
+| fd | Audio Codec设备文件描述符 | 输入 |
+| k_acodec_get_adcr_volume | ioctl号 | 输入 |
+| arg | 有符号浮点型指针 | 输出 |
+
+- 【返回值】
+
+| 返回值 | 描述 |
+| ------ | -------------------- |
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+- 【需求】
+
+头文件:k_acodec_comm.h
+
+库文件:libacodec.a
+
+- 【注意】
+
+模拟增益范围`[-97,30]`,赋值越大,音量越大,按0.5db递增。
+
+#### 2.5.5 k_acodec_get_alc_gain_micl
+
+- 【描述】
+
+获取左声道alc输入模拟增益值。
+
+- 【语法】
+
+int ioctl (int fd, k_acodec_set_alc_gain_micl, float \*arg);
+
+- 【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+| -------------------------- | ------------------------- | ------------- |
+| fd | Audio Codec设备文件描述符 | 输入 |
+| k_acodec_get_alc_gain_micl | ioctl号 | 输入 |
+| arg | 有符号浮点型指针 | 输出 |
+
+- 【返回值】
+
+| 返回值 | 描述 |
+| ------ | -------------------- |
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+- 【需求】
+
+头文件:k_acodec_comm.h
+
+库文件:libacodec.a
+
+- 【注意】
+
+模拟增益范围`[-18,28.5]`,赋值越大,音量越大,按1.5db递增。
+
+#### 2.5.6 k_acodec_get_alc_gain_micr
+
+- 【描述】
+
+获取右声道alc输入模拟增益值。
+
+- 【语法】
+
+int ioctl (int fd, k_acodec_get_alc_gain_micr, float \*arg);
+
+- 【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+| -------------------------- | ------------------------- | ------------- |
+| fd | Audio Codec设备文件描述符 | 输入 |
+| k_acodec_get_alc_gain_micr | ioctl号 | 输入 |
+| arg | 有符号浮点型指针 | 输出 |
+
+- 【返回值】
+
+| 返回值 | 描述 |
+| ------ | -------------------- |
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+- 【需求】
+
+头文件:k_acodec_comm.h
+
+库文件:libacodec.a
+
+- 【注意】
+
+模拟增益范围`[-18,28.5]`,赋值越大,音量越大,按1.5db递增。
+
+#### 2.5.7 k_acodec_get_gain_hpoutl
+
+- 【描述】
+
+获取左声道输出模拟增益值。
+
+- 【语法】
+
+int ioctl (int fd, k_acodec_get_gain_hpoutl, float \*arg);
+
+- 【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+| ------------------------ | ------------------------- | ------------- |
+| fd | Audio Codec设备文件描述符 | 输入 |
+| k_acodec_get_gain_hpoutl | ioctl号 | 输入 |
+| arg | 有符号浮点型指针 | 输出 |
+
+- 【返回值】
+
+| 返回值 | 描述 |
+| ------ | -------------------- |
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+- 【需求】
+
+头文件:k_acodec_comm.h
+
+库文件:libacodec.a
+
+- 【注意】
+
+模拟增益范围`[-39,6]`,赋值越大,音量越大,按1.5db递增。
+
+#### 2.5.8 k_acodec_get_gain_hpoutr
+
+- 【描述】
+
+获取右声道输出模拟增益控制。
+
+- 【语法】
+
+int ioctl (int fd, k_acodec_get_gain_hpoutr, float \*arg);
+
+- 【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+| ------------------------ | ------------------------- | ------------- |
+| fd | Audio Codec设备文件描述符 | 输入 |
+| k_acodec_get_gain_hpoutr | ioctl号 | 输入 |
+| arg | 有符号浮点型指针 | 输出 |
+
+- 【返回值】
+
+| 返回值 | 描述 |
+| ------ | -------------------- |
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+- 【需求】
+
+头文件:k_acodec_comm.h
+
+库文件:libacodec.a
+
+- 【注意】
+
+模拟增益范围`[-39,6]`,赋值越大,音量越大,按1.5db递增。
+
+#### 2.5.9 k_acodec_get_dacl_volume
+
+- 【描述】
+
+获取左声道输出数字增益值。
+
+- 【语法】
+
+int ioctl (int fd, k_acodec_get_dacl_volume, float \*arg);
+
+- 【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+| ------------------------ | ------------------------- | ------------- |
+| fd | Audio Codec设备文件描述符 | 输入 |
+| k_acodec_get_dacl_volume | ioctl号 | 输入 |
+| arg | 有符号浮点型指针 | 输出 |
+
+- 【返回值】
+
+| 返回值 | 描述 |
+| ------ | -------------------- |
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+- 【需求】
+
+头文件:k_acodec_comm.h
+
+库文件:libacodec.a
+
+- 【注意】
+
+模拟增益范围`[-120,7]`,赋值越大,音量越大,按0.5db递增。
+
+#### 2.5.10 k_acodec_get_dacr_volume
+
+- 【描述】
+
+获取右声道输出数字增益值。
+
+- 【语法】
+
+int ioctl (int fd, k_acodec_get_dacr_volume, float \*arg);
+
+- 【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+| ------------------------ | ------------------------- | ------------- |
+| fd | Audio Codec设备文件描述符 | 输入 |
+| k_acodec_get_dacr_volume | ioctl号 | 输入 |
+| arg | 有符号浮点型指针 | 输出 |
+
+- 【返回值】
+
+| 返回值 | 描述 |
+| ------ | -------------------- |
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+- 【需求】
+
+头文件:k_acodec_comm.h
+
+库文件:libacodec.a
+
+- 【注意】
+
+模拟增益范围`[-120,7]`,赋值越大,音量越大,按0.5db递增。
+
+#### 2.5.10 k_acodec_reset
+
+- 【描述】
+
+音量重置:包括adc、dac、alc数字模拟增益。
+
+- 【语法】
+
+int ioctl (int fd, k_acodec_reset, ...);
+
+- 【参数】
+
+| **参数名称** | **描述** | **输入/输出** |
+| -------------- | ------------------------- | ------------- |
+| fd | Audio Codec设备文件描述符 | 输入 |
+| k_acodec_reset | ioctl号 | 输入 |
+
+- 【返回值】
+
+| 返回值 | 描述 |
+| ------ | -------------------- |
+| 0 | 成功 |
+| 非0 | 失败,其值参见错误码 |
+
+- 【需求】
+
+头文件:k_acodec_comm.h
+
+库文件:libacodec.a
+
+- 【注意】
+
+无
+
+### 2.6 音频编码MAPI
+
+音频编码功能模块提供以下 MAPI:
+
+- [kd_mapi_aenc_init](#261-kd_mapi_aenc_init):初始化编码通道
+- [kd_mapi_aenc_deinit](#262-kd_mapi_aenc_deinit):去初始化编码通道。
+- [kd_mapi_aenc_start](#263-kd_mapi_aenc_start):启动编码通道。
+- [kd_mapi_aenc_stop](#264-kd_mapi_aenc_stop):停止编码通道。
+- [kd_mapi_aenc_registercallback](#265-kd_mapi_aenc_registercallback):注册编码回调函数。
+- [kd_mapi_aenc_unregistercallback](#266-kd_mapi_aenc_unregistercallback):解注册编码回调函数。
+- [kd_mapi_aenc_bind_ai](#267-kd_mapi_aenc_bind_ai):绑定 ai。
+- [kd_mapi_aenc_unbind_ai](#268-kd_mapi_aenc_unbind_ai):解绑定 ai。
+- [kd_mapi_register_ext_audio_encoder](#269-kd_mapi_register_ext_audio_encoder):注册外部音频编码器。
+- [kd_mapi_unregister_ext_audio_encoder](#2610-kd_mapi_unregister_ext_audio_encoder):解注册外部音频编码器。
+- [kd_mapi_aenc_send_frame](#2611-kd_mapi_aenc_send_frame):发送音频编码音频帧。
+
+#### 2.6.1 kd_mapi_aenc_init
+
+- 【描述】
+
+初始化编码通道。
+
+- 【语法】
+
+kd_mapi_aenc_init([k_handle](#331-k_handle) aenc_hdl,const [k_aenc_chn_attr](#323-k_aenc_chn_attr) \*attr);
+
+#### 2.6.2 kd_mapi_aenc_deinit
+
+- 【描述】
+
+去初始化编码通道。
+
+- 【语法】
+
+kd_mapi_aenc_deinit([k_handle](#331-k_handle) aenc_hdl);
+
+#### 2.6.3 kd_mapi_aenc_start
+
+- 【描述】
+
+启动编码通道。
+
+- 【语法】
+
+kd_mapi_aenc_start([k_handle](#331-k_handle) aenc_hdl);
+
+#### 2.6.4 kd_mapi_aenc_stop
+
+- 【描述】
+
+停止编码通道。
+
+- 【语法】
+
+kd_mapi_aenc_stop([k_handle](#331-k_handle) aenc_hdl);
+
+#### 2.6.5 kd_mapi_aenc_registercallback
+
+- 【描述】
+
+注册编码回调函数。
+
+- 【语法】
+
+k_s32 kd_mapi_aenc_registercallback([k_handle](#331-k_handle) aenc_hdl,k_aenc_callback_s \*aenc_cb);
+
+#### 2.6.6 kd_mapi_aenc_unregistercallback
+
+- 【描述】
+
+注册编码回调函数。
+
+- 【语法】
+
+k_s32 kd_mapi_aenc_unregistercallback([k_handle](#331-k_handle) aenc_hdl);
+
+#### 2.6.7 kd_mapi_aenc_bind_ai
+
+- 【描述】
+
+绑定ai。
+
+- 【语法】
+
+k_s32 kd_mapi_aenc_bind_ai([k_handle](#331-k_handle) ai_hdl,[k_handle](#331-k_handle) aenc_hdl);
+
+#### 2.6.8 kd_mapi_aenc_unbind_ai
+
+- 【描述】
+
+解绑定ai。
+
+- 【语法】
+
+k_s32 kd_mapi_aenc_unbind_ai([k_handle](#331-k_handle) ai_hdl,[k_handle](#331-k_handle) aenc_hdl);
+
+#### 2.6.9 kd_mapi_register_ext_audio_encoder
+
+- 【描述】
+
+注册外置编码器。
+
+- 【语法】
+
+k_s32 kd_mapi_register_ext_audio_encoder(const [k_aenc_encoder](#322-k_aenc_encoder) \*encoder,[k_handle](#331-k_handle) \* aencoder_hdl);
+
+#### 2.6.10 kd_mapi_unregister_ext_audio_encoder
+
+- 【描述】
+
+解注册外部音频编码器。
+
+- 【语法】
+
+k_s32 kd_mapi_unregister_ext_audio_encoder( [k_handle](#331-k_handle) aencoder_hdl);
+
+#### 2.6.11 kd_mapi_aenc_send_frame
+
+- 【描述】
+
+发送音频编码音频帧
+
+- 【语法】
+
+k_s32 kd_mapi_aenc_send_frame([k_handle](#331-k_handle) ai_hdl,const [k_audio_frame](#3114-k_audio_frame) \*frame);
+
+### 2.7 音频解码MAPI
+
+音频解码功能模块提供以下 MAPI:
+
+- [kd_mapi_adec_init](#261-kd_mapi_aenc_init):初始化解码通道
+- [kd_mapi_adec_deinit](#271-kd_mapi_adec_init):去初始化解码通道。
+- [kd_mapi_adec_start](#273-kd_mapi_adec_start):启动解码通道。
+- [kd_mapi_adec_stop](#274-kd_mapi_adec_stop):停止解码通道。
+- [kd_mapi_adec_registercallback](#275-kd_mapi_adec_registercallback):注册解码回调函数。
+- [kd_mapi_adec_unregistercallback](#276-kd_mapi_adec_unregistercallback):解注册解码回调函数。
+- [kd_mapi_adec_bind_ao](#277-kd_mapi_adec_bind_ao):绑定 ao。
+- [kd_mapi_adec_unbind_ao](#278-kd_mapi_adec_unbind_ao):解绑定 ao。
+- [kd_mapi_register_ext_audio_decoder](#279-kd_mapi_register_ext_audio_decoder):注册外部音频解码器。
+- [kd_mapi_unregister_ext_audio_decoder](#2710-kd_mapi_unregister_ext_audio_decoder):解注册外部音频解码器。
+- [kd_mapi_adec_send_stream](#2711-kd_mapi_adec_send_stream):发送音频解码音频帧。
+
+#### 2.7.1 kd_mapi_adec_init
+
+- 【描述】
+
+初始化解码通道。
+
+- 【语法】
+
+kd_mapi_adec_init([k_handle](#331-k_handle) adec_hdl,const [k_adec_chn_attr](#323-k_aenc_chn_attr) \*attr);
+
+#### 2.7.2 kd_mapi_adec_deinit
+
+- 【描述】
+
+去初始化解码通道。
+
+- 【语法】
+
+kd_mapi_adec_deinit([k_handle](#331-k_handle) adec_hdl);
+
+#### 2.7.3 kd_mapi_adec_start
+
+- 【描述】
+
+启动解码通道。
+
+- 【语法】
+
+kd_mapi_adec_start([k_handle](#331-k_handle) adec_hdl);
+
+#### 2.7.4 kd_mapi_adec_stop
+
+- 【描述】
+
+停止解码通道。
+
+- 【语法】
+
+kd_mapi_adec_stop([k_handle](#331-k_handle) adec_hdl);
+
+#### 2.7.5 kd_mapi_adec_registercallback
+
+- 【描述】
+
+注册解码回调函数。
+
+- 【语法】
+
+k_s32 kd_mapi_adec_registercallback([k_handle](#331-k_handle) adec_hdl,k_adec_callback_s \*adec_cb);
+
+#### 2.7.6 kd_mapi_adec_unregistercallback
+
+- 【描述】
+
+注册解码回调函数。
+
+- 【语法】
+
+k_s32 kd_mapi_adec_unregistercallback([k_handle](#331-k_handle) adec_hdl);
+
+#### 2.7.7 kd_mapi_adec_bind_ao
+
+- 【描述】
+
+绑定ao.
+
+- 【语法】
+
+k_s32 kd_mapi_adec_bind_ao([k_handle](#331-k_handle) ao_hdl,[k_handle](#331-k_handle) adec_hdl);
+
+#### 2.7.8 kd_mapi_adec_unbind_ao
+
+- 【描述】
+
+解绑定ao。
+
+- 【语法】
+
+k_s32 kd_mapi_adec_unbind_ao([k_handle](#331-k_handle) ao_hdl,[k_handle](#331-k_handle) adec_hdl);
+
+#### 2.7.9 kd_mapi_register_ext_audio_decoder
+
+- 【描述】
+
+注册外置解码器。
+
+- 【语法】
+
+k_s32 kd_mapi_register_ext_audio_decoder(const [k_adec_decoder](#329-k_adec_decoder) \*decoder,[k_handle](#331-k_handle) \* adecoder_hdl);
+
+#### 2.7.10 kd_mapi_unregister_ext_audio_decoder
+
+- 【描述】
+
+解注册外部音频解码器。
+
+- 【语法】
+
+k_s32 kd_mapi_unregister_ext_audio_decoder( [k_handle](#331-k_handle) adecoder_hdl);
+
+#### 2.7.11 kd_mapi_adec_send_stream
+
+- 【描述】
+
+发送音频解码音频帧。
+
+- 【语法】
+
+k_s32 kd_mapi_adec_send_stream([k_handle](#331-k_handle) ai_hdl,const [k_audio_stream](#327-k_audio_stream) \*stream);
+
+## 3. 数据类型
+
+### 3.1 音频输入输出
+
+音频输入输出相关数据类型、数据结构定义如下:
+
+- [k_audio_type](#311-k_audio_type):定义音频输入输出类型。
+- [k_audio_dev](#312-k_audio_dev):定义音频设备。
+- [k_ai_chn](#313-k_ai_chn):定义ai通道。
+- [k_ao_chn](#314-k_ao_chn):定义ao通道。
+- [K_MAX_AUDIO_FRAME_NUM](#315-k_max_audio_frame_num):定义最大音频解码缓存帧数。
+- [k_audio_bit_width](#316-k_audio_bit_width):定义音频采样精度。
+- [k_audio_snd_mode](#317-k_audio_snd_mode):定义音频声道模式。
+- [k_audio_pdm_oversample](#318-k_audio_pdm_oversample):定义pdm过采样。
+- [k_aio_dev_attr](#3112-k_aio_dev_attr):定义音频输入输出设备属性结构体。
+- [k_audio_pdm_attr](#319-k_audio_pdm_attr):定义pdm音频输入属性。
+- [k_i2s_work_mode](#3111-k_i2s_work_mode):定义i2s工作模式。
+- [k_audio_i2s_attr](#3110-k_audio_i2s_attr):定义i2s音频输入属性。
+- [k_aio_i2s_type](#3113-k_aio_i2s_type):定义i2s对接设备类型。
+- [k_audio_frame](#3114-k_audio_frame):定义音频帧结构体。
+- [k_audio_anr_cfg](#3115-k_audio_anr_cfg):定义音频语音降噪功能配置信息结构体。
+- [k_audio_agc_cfg](#3116-k_audio_agc_cfg):定义音频自动增益功能配置信息结构体。
+- [k_ai_vqe_cfg](#3117-k_ai_vqe_cfg):定义音频输入声音质量增强配置信息结构体。
+
+#### 3.1.1 k_audio_type
+
+【说明】
+
+定义音频输入输出类型。
+
+【定义】
+
+```c
+typedef enum {
+KD_AUDIO_INPUT_TYPE_I2S = 0,//i2s in
+KD_AUDIO_INPUT_TYPE_PDM = 1,//pdm in
+KD_AUDIO_OUTPUT_TYPE_I2S = 2,//i2s out
+} k_audio_type;
+```
+
+【注意事项】
+
+音频输入包括i2s和pdm两种,音频输出只有i2s。
+
+【相关数据类型及接口】
+
+无
+
+#### 3.1.2 k_audio_dev
+
+【说明】
+
+定义音频设备。
+
+【定义】
+
+**typedef k_u32 k_audio_dev;**
+
+【注意事项】
+
+ai模块,k_audio_dev取值为0和1,其中0为i2s音频输入,1为pdm音频输入。
+
+ao模块,k_audio_dev取值固定为0,即i2s音频输出。
+
+#### 3.1.3 k_ai_chn
+
+【说明】
+
+定义ai音频通道。
+
+【定义】
+
+**typedef k_u32 k_ai_chn;**
+
+【注意事项】
+
+I2s音频输入,共有2组,取值范围为`[0,1]`。
+
+pdm音频输入,共有4组,取值范围为`[0,3]`。
+
+#### 3.1.4 k_ao_chn
+
+【说明】
+
+定义ao音频通道。
+
+【定义】
+
+**typedef k_u32 k_ao_chn;**
+
+【注意事项】
+
+I2s音频输出,共有2组,取值范围为`[0,1]`。
+
+#### 3.1.5 K_MAX_AUDIO_FRAME_NUM
+
+【说明】
+
+定义最大音频解码缓存帧数。
+
+【定义】
+
+\#define K_MAX_AUDIO_FRAME_NUM 50
+
+#### 3.1.6 k_audio_bit_width
+
+【说明】
+
+- 定义音频采样精度。
+
+【定义】
+
+```c
+typedef enum {
+KD_AUDIO_BIT_WIDTH_16 = 0, /* 16bit width */
+KD_AUDIO_BIT_WIDTH_24 = 1, /* 24bit width */
+KD_AUDIO_BIT_WIDTH_32 = 2, /* 32bit width */
+} k_audio_bit_width;
+```
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+无
+
+#### 3.1.7 k_audio_snd_mode
+
+【说明】
+
+- 定义声道模式。
+
+【定义】
+
+```c
+typedef enum {
+KD_AUDIO_SOUND_MODE_MONO = 0, /* mono */
+KD_AUDIO_SOUND_MODE_STEREO = 1, /* stereo */
+} k_audio_snd_mode;
+```
+
+#### 3.1.8 k_audio_pdm_oversample
+
+【说明】
+
+定义pdm过采样。
+
+【定义】
+
+```c
+typedef enum
+{
+KD_AUDIO_PDM_INPUT_OVERSAMPLE_32 = 0,
+KD_AUDIO_PDM_INPUT_OVERSAMPLE_64 ,
+KD_AUDIO_PDM_INPUT_OVERSAMPLE_128 ,
+} k_audio_pdm_oversample;
+```
+
+#### 3.1.9 k_audio_pdm_attr
+
+【说明】
+
+定义pdm音频输入属性。
+
+【定义】
+
+```c
+typedef struct {
+k_u32 chn_cnt; /* channle number on FS,i2s valid value:1/2,pdm valid value:1/2/3/4*/
+k_audio_sample_rate rate;
+k_audio_bit_width width;
+k_audio_snd_mode mode;
+k_audio_pdm_oversample oversample;
+k_u32 frame_num; /* frame num in buf[2,K_MAX_AUDIO_FRAME_NUM] */
+k_u32 point_num_per_frame;
+} k_audio_pdm_attr;
+```
+
+【成员】
+
+| 成员名称 | 描述 |
+|---------------------|-----------------------------------------------------|
+| chn_cnt | 支持的通道数目。 支持1-4个通道,通道使能需要连续。 |
+| sample_rate | 采样率:支持8k\~192k |
+| bit_width | 采样精度:支持16/24/32 |
+| snd_mode | 音频声道模式。支持单声道和双声道。 |
+| pdm_oversample | 过采样:支持32、64、128倍过采样。 |
+| frame_num | 缓存帧数目`[2,K_MAX_AUDIO_FRAME_NUM]`。 |
+| point_num_per_frame | 每帧的采样点个数。 |
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+无
+
+#### 3.1.10 k_audio_i2s_attr
+
+【说明】
+
+定义i2s音频输入属性。
+
+【定义】
+
+```c
+typedef struct
+{
+k_u32 chn_cnt; /* channle number on FS,i2s valid value:1/2,pdm valid value:1/2/3/4 */
+k_u32 sample_rate; /* sample rate 8k ~192k */
+k_audio_bit_width bit_width;
+k_audio_snd_mode snd_mode; /* momo or stereo */
+k_i2s_work_mode i2s_mode; /*i2s work mode*/
+k_u32 frame_num; /* frame num in buf[2,K_MAX_AUDIO_FRAME_NUM] */
+k_u32 point_num_per_frame;
+k_aio_i2s_type type;
+} k_audio_i2s_attr;
+```
+
+【成员】
+
+| 成员名称 | 描述 |
+| ------------------- | ---------------------------------------------------- |
+| chn_cnt | 支持的通道数目。 支持1-2个通道。 |
+| sample_rate | 采样率:支持8k~192k |
+| bit_width | 采样精度:支持16/24/32 |
+| snd_mode | 音频声道模式。支持单声道和双声道。 |
+| I2s_mode | I2s工作模式:支持飞利浦模式,左对齐模式,右对齐模式。 |
+| frame_num | 缓存帧数目`[2,K_MAX_AUDIO_FRAME_NUM]`。 |
+| point_num_per_frame | 每帧的采样点个数`[sample_rate/100,sample_rate]`。 |
+| i2s_type | i2s对接设备类型:内置codec或外接设备。 |
+
+【注意事项】
+
+每帧的采样点个数point_num_per_frame和采样率sample_rate的取值决定了硬件产生
+
+中断的频率,频率过高会影响系统的性能,跟其他业务也会相互影响,建议这两个参
+
+数的取值满足算式:(point_num_per_frame *1000)/ sample_rate >=10(中断100次),比如在采样
+
+率为16000Hz时,建议设置采样点个数大于或者等于160。
+
+【相关数据类型及接口】
+
+无
+
+#### 3.1.11 k_i2s_work_mode
+
+【说明】
+
+定义i2s工作模式。
+
+【定义】
+
+```c
+typedef enum
+{
+K_STANDARD_MODE = 1,
+K_RIGHT_JUSTIFYING_MODE = 2,
+K_LEFT_JUSTIFYING_MODE = 4
+} k_i2s_work_mode;
+```
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+无
+
+#### 3.1.12 k_aio_dev_attr
+
+【说明】
+
+定义音频输入输出设备属性结构体。
+
+【定义】
+
+```c
+typedef struct {
+k_audio_type type;
+union
+{
+k_audio_pdm_attr pdm_attr;
+k_audio_i2s_attr i2s_attr;
+} kd_audio_attr;
+} k_aio_dev_attr;
+```
+
+【成员】
+
+| 成员名称 | 描述 |
+|---------------|--------------|
+| audio_type | 音频类型。 |
+| kd_audio_attr | 音频属性设置 |
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+无
+
+#### 3.1.13 k_aio_i2s_type
+
+【说明】
+
+定义i2s对接设备类型。
+
+【定义】
+
+```c
+typedef enum
+{
+K_AIO_I2STYPE_INNERCODEC = 0, /* AIO I2S connect inner audio CODEC */
+K_AIO_I2STYPE_EXTERN,/* AIO I2S connect extern hardware */
+} k_aio_i2s_type;
+```
+
+【注意事项】
+
+内置audio codec固定使用第0组i2s 通路,第1组i2s通路仍使用外部codec。
+
+【相关数据类型及接口】
+
+无
+
+#### 3.1.14 k_audio_frame
+
+【说明】
+
+定义音频帧结构体。
+
+【定义】
+
+```c
+typedef struct {
+k_audio_bit_width bit_width;
+k_audio_snd_mode snd_mode;
+void* virt_addr;
+k_u64 phys_addr;
+k_u64 time_stamp; /* audio frame time stamp */
+k_u32 seq; /* audio frame seq */
+k_u32 len; /* data lenth per channel in frame */
+k_u32 pool_id;
+} k_audio_frame;
+```
+
+【成员】
+
+| 成员名称 | 描述 |
+|------------|----------------------------|
+| bit_width | 采样精度。 |
+| snd_mode | 音频声道模式。 |
+| virt_addr | 音频帧数据虚拟地址。 |
+| phys_addr | 音频帧数据物理地址。 |
+| time_stamp | 音频帧时间戳,以μs为单位。 |
+| seq | 音频帧序号。 |
+| len | 音频帧长度,以byte为单位。 |
+| pool_id | 音频帧缓存池ID。 |
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+无
+
+#### 3.1.15 k_audio_anr_cfg
+
+【说明】
+
+定义音频语音降噪功能配置信息结构体。
+
+【定义】
+
+```c
+typedef struct
+
+{
+k_bool anr_switch;
+} k_audio_anr_cfg;
+```
+
+【成员】
+
+| 成员名称 | 描述 |
+|------------|------------------------|
+| anr_switch | 音频语音降噪功能使能。 |
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+无
+
+#### 3.1.16 k_audio_agc_cfg
+
+【说明】
+
+定义音频自动增益功能配置信息结构体。
+
+【定义】
+
+```c
+typedef struct
+{
+k_bool agc_switch;
+} k_audio_agc_cfg;
+```
+
+【成员】
+
+| 成员名称 | 描述 |
+|------------|------------------------|
+| agc_switch | 音频自动增益功能使能。 |
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+无
+
+#### 3.1.17 k_ai_vqe_cfg
+
+【说明】
+
+定义音频输入声音质量增强配置信息结构体。
+
+【定义】
+
+typedef struct
+{
+k_audio_anr_cfg anr_cfg;
+k_audio_agc_cfg agc_cfg;
+} k_ai_vqe_cfg;
+
+【成员】
+
+| 成员名称 | 描述 |
+|----------|----------------------------|
+| anr_cfg | 音频语音降噪功能配置参数。 |
+| agc_cfg | 音频自动增益控制配置参数。 |
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+无
+
+### 3.2 音频编解码
+
+音频编解码相关数据类型、数据结构定义如下:
+
+[k_payload_type](#321-k_payload_type)
+
+[k_aenc_encoder](#322-k_aenc_encoder)
+
+[k_aenc_chn_attr](#323-k_aenc_chn_attr)
+
+[AENC_MAX_CHN_NUMS](#324-aenc_max_chn_nums)
+
+[K_MAX_ENCODER_NAME_LEN](#325-k_max_encoder_name_len)
+
+[k_aenc_chn](#326-k_aenc_chn)
+
+[k_audio_stream](#327-k_audio_stream)
+
+[k_adec_chn_attr](#328-k_adec_chn_attr)
+
+[k_adec_decoder](#329-k_adec_decoder)
+
+[K_MAX_DECODER_NAME_LEN](#3210-k_max_decoder_name_len)
+
+[ADEC_MAX_CHN_NUMS](#3211-adec_max_chn_nums)
+
+#### 3.2.1 k_payload_type
+
+【说明】
+
+定义音视频净荷类型枚举。
+
+【定义】
+
+```c
+typedef enum {
+K_PT_PCMU = 0,
+K_PT_1016 = 1,
+K_PT_G721 = 2,
+K_PT_GSM = 3,
+K_PT_G723 = 4,
+K_PT_DVI4_8K = 5,
+K_PT_DVI4_16K = 6,
+K_PT_LPC = 7,
+K_PT_PCMA = 8,
+K_PT_G722 = 9,
+K_PT_S16BE_STEREO = 10,
+K_PT_S16BE_MONO = 11,
+K_PT_QCELP = 12,
+K_PT_CN = 13,
+K_PT_MPEGAUDIO = 14,
+K_PT_G728 = 15,
+K_PT_DVI4_3 = 16,
+K_PT_DVI4_4 = 17,
+K_PT_G729 = 18,
+K_PT_G711A = 19,
+K_PT_G711U = 20,
+K_PT_G726 = 21,
+K_PT_G729A = 22,
+K_PT_LPCM = 23,
+K_PT_CelB = 25,
+K_PT_JPEG = 26,
+K_PT_CUSM = 27,
+K_PT_NV = 28,
+K_PT_PICW = 29,
+K_PT_CPV = 30,
+K_PT_H261 = 31,
+K_PT_MPEGVIDEO = 32,
+K_PT_MPEG2TS = 33,
+K_PT_H263 = 34,
+K_PT_SPEG = 35,
+K_PT_MPEG2VIDEO = 36,
+K_PT_AAC = 37,
+K_PT_WMA9STD = 38,
+K_PT_HEAAC = 39,
+K_PT_PCM_VOICE = 40,
+K_PT_PCM_AUDIO = 41,
+K_PT_MP3 = 43,
+K_PT_ADPCMA = 49,
+K_PT_AEC = 50,
+K_PT_X_LD = 95,
+K_PT_H264 = 96,
+K_PT_D_GSM_HR = 200,
+K_PT_D_GSM_EFR = 201,
+K_PT_D_L8 = 202,
+K_PT_D_RED = 203,
+K_PT_D_VDVI = 204,
+K_PT_D_BT656 = 220,
+K_PT_D_H263_1998 = 221,
+K_PT_D_MP1S = 222,
+K_PT_D_MP2P = 223,
+K_PT_D_BMPEG = 224,
+K_PT_MP4VIDEO = 230,
+K_PT_MP4AUDIO = 237,
+K_PT_VC1 = 238,
+K_PT_JVC_ASF = 255,
+K_PT_D_AVI = 256,
+K_PT_DIVX3 = 257,
+K_PT_AVS = 258,
+K_PT_REAL8 = 259,
+K_PT_REAL9 = 260,
+K_PT_VP6 = 261,
+K_PT_VP6F = 262,
+K_PT_VP6A = 263,
+K_PT_SORENSON = 264,
+K_PT_H265 = 265,
+K_PT_VP8 = 266,
+K_PT_MVC = 267,
+K_PT_PNG = 268,
+K_PT_AMR = 1001,
+K_PT_MJPEG = 1002,
+K_PT_AMRWB = 1003,
+K_PT_PRORES = 1006,
+K_PT_OPUS = 1007,
+K_PT_BUTT
+} k_payload_type;
+```
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+无
+
+#### 3.2.2 k_aenc_encoder
+
+【说明】
+
+定义编码器属性结构体。
+
+【定义】
+
+```c
+typedef struct {
+k_payload_type k_u32 max_frame_len;
+k_char name[K_MAX_ENCODER_NAME_LEN];
+k_s32 (func_open_encoder)(void encoder_attr,void *encoder);
+k_s32 (func_enc_frame)(void *encoder,const k_audio_frame *data,k_u8 *outbuf, k_u32 *out_len);
+k_s32 (*func_close_encoder)(void *encoder);
+} k_aenc_encoder;
+
+```
+
+【成员】
+
+| 成员名称 | 描述 |
+|--------------------|-------------------------|
+| type | 编码协议类型。 |
+| max_frame_len | 最大码流长度。 |
+| name | 编码器名称。 |
+| func_open_encoder | 打开编码器的函数指针。 |
+| func_enc_frame | 进行编码的函数指针。 |
+| func_close_encoder | 关闭编码器的函数指针。 |
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+无
+
+#### 3.2.3 k_aenc_chn_attr
+
+【说明】
+
+定义编码器通道属性结构体。
+
+【定义】
+
+```c
+typedef struct {
+k_payload_type type;
+k_u32 point_num_per_frame;
+k_u32 buf_size; // buf size[2,K_MAX_AUDIO_FRAME_NUM]
+} k_aenc_chn_attr;
+```
+
+【成员】
+
+| 成员名称 | 描述 |
+|---------------------|---------------------------------------------------------------------------------------------------------|
+| type | 音频编码协议类型。 |
+| point_num_per_frame | 音频编码协议对应的帧长(编码时收到的音频帧长小于等 于该帧长都可以进行编码)。 |
+| buf_size | 音频编码缓存大小。 取值范围:`[2, K_MAX_AUDIO_FRAME_NUM]`,以帧为 单位。 |
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+无
+
+#### 3.2.4 AENC_MAX_CHN_NUMS
+
+【说明】
+
+定义最大编码通道数。
+
+【定义】
+
+\#define AENC_MAX_CHN_NUMS 4
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+无
+
+#### 3.2.5 K_MAX_ENCODER_NAME_LEN
+
+【说明】
+
+定义音频编码器名称最大长度。
+
+【定义】
+
+\#define K_MAX_ENCODER_NAME_LEN 25
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+无
+
+#### 3.2.6 k_aenc_chn
+
+【说明】
+
+定义编码通道类型。
+
+【定义】
+
+typedef k_u32 k_aenc_chn;
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+无
+
+#### 3.2.7 k_audio_stream
+
+【说明】
+
+定义码流结构体。
+
+【定义】
+
+```c
+typedef struct {
+void *stream; /* the virtual address of stream */
+k_u64 phys_addr; /* the physics address of stream */
+k_u32 len; /* stream lenth, by bytes */
+k_u64 time_stamp; /* frame time stamp */
+k_u32 seq; /* frame seq, if stream is not a valid frame,seq is 0 */
+} k_audio_stream;
+```
+
+【成员】
+
+| 成员名称 | 描述 |
+|------------|------------------------------|
+| stream | 音频码流数据指针 |
+| phys_addr | 音频码流的物理地址。 |
+| len | 音频码流长度。以byte为单位。 |
+| time_stamp | 音频码流时间戳。 |
+| seq | 音频码流序号。 |
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+无
+
+#### 3.2.8 k_adec_chn_attr
+
+【说明】
+
+定义解码器通道属性结构体。
+
+【定义】
+
+```c
+typedef struct {
+k_payload_type payload_type;
+k_u32 point_num_per_frame;
+k_u32 buf_size; /* buf size[2~K_MAX_AUDIO_FRAME_NUM] */
+} k_adec_chn_attr;
+```
+
+【成员】
+
+| 成员名称 | 描述 |
+|---------------------|---------------------------------------------------------------------------------------------------------|
+| type | 音频解码协议类型。 |
+| point_num_per_frame | 音频解码协议对应的帧长 |
+| buf_size | 音频编码缓存大小。 取值范围:`[2, K_MAX_AUDIO_FRAME_NUM]`,以帧为 单位。 |
+
+【注意事项】
+
+音频解码的部分属性需要与输出设备属性相匹配,例如采样率、帧长(每帧采样
+
+点数目)等。
+
+【相关数据类型及接口】
+
+无
+
+#### 3.2.9 k_adec_decoder
+
+【说明】
+
+定义解码器属性结构体。
+
+【定义】
+
+```c
+typedef struct {
+k_payload_type payload_type;
+k_char name[K_MAX_DECODER_NAME_LEN];
+k_s32 (func_open_decoder)(void *decoder_attr, void **decoder);
+k_s32 (*func_dec_frame)(void *decoder, k_u8 **inbuf, k_s32 *left_byte, k_u16*outbuf, k_u32 *out_len, k_u32 *chns);
+k_s32 (*func_get_frame_info)(void *decoder, void *info);
+k_s32 (*func_close_decoder)(void *decoder);
+k_s32 (*func_reset_decoder)(void *decoder);
+} k_adec_decoder;
+```
+
+【成员】
+
+| 成员名称 | 描述 |
+|---------------------|-----------------------------------------|
+| type | 解码协议类型。 |
+| name | 解码器名称。 |
+| func_open_decoder | 打开解码器的函数指针。 |
+| func_get_frame_info | 获取音频帧信息的函数指针。 |
+| func_close_decoder | 关闭解码器的函数指针。 |
+| func_reset_decoder | 清空缓存buffer,复位解码器的函数指针。 |
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+无
+
+#### 3.2.10 K_MAX_DECODER_NAME_LEN
+
+【说明】
+
+定义音频解码器名称最大长度。
+
+【定义】
+
+\#define K_MAX_DECODER_NAME_LEN 25
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+无
+
+#### 3.2.11 ADEC_MAX_CHN_NUMS
+
+【说明】
+
+定义最大解码通道数。
+
+【定义】
+
+\#define ADEC_MAX_CHN_NUMS 4
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+无
+
+#### 3.2.12 k_adec_chn
+
+【说明】
+
+定义解码通道类型。
+
+【定义】
+
+typedef k_u32 k_adec_chn;
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+无
+
+### 3.3 MAPI
+
+音频mapi相关数据类型、数据结构定义如下
+
+[k_handle](#331-k_handle)
+
+#### 3.3.1 k_handle
+
+【说明】
+
+定义操作句柄。
+
+【定义】
+
+typedef k_u32 k_handle;
+
+【相关数据类型及接口】
+
+无
+
+## 4. 错误码
+
+### 4.1 音频输入API 错误码
+
+| 错误代码 | 宏定义 | 描述 |
+|----------|------------------------|-----------------------------|
+| | K_ERR_AI_INVALID_DEVID | 音频输入设备号无效 |
+| | K_ERR_AI_INVALID_CHNID | 音频输入通道号无效 |
+| | K_ERR_AI_ILLEGAL_PARAM | 音频输入参数设置无效 |
+| | K_ERR_AI_NOT_ENABLED | 音频输入设备或通道没有使 能 |
+| | K_ERR_AI_NULL_PTR | 输入参数空指针错误 |
+| | K_ERR_AI_NOT_CFG | 音频输入设备属性未设置 |
+| | K_ERR_AI_NOT_SUPPORT | 操作不支持 |
+| | K_ERR_AI_NOT_PERM | 操作不允许 |
+| | K_ERR_AI_NO_MEM | 分配内存失败 |
+| | K_ERR_AI_NO_BUF | 音频输入缓存不足 |
+| | K_ERR_AI_BUF_EMPTY | 音频输入缓存为空 |
+| | K_ERR_AI_BUF_FULL | 音频输入缓存为满 |
+| | K_ERR_AI_NOT_READY | 音频输入系统未初始化 |
+| | K_ERR_AI_BUSY | 音频输入系统忙 |
+
+### 4.2 音频输出API 错误码
+
+| 错误代码 | 宏定义 | 描述 |
+|----------|-------------------------|---------------------------|
+| | K_ERR_AO_INVALID_DEV_ID | 音频输出设备号无效 |
+| | K_ERR_AO_INVALID_CHN_ID | 音频输出通道号无效 |
+| | K_ERR_AO_ILLEGAL_PARAM | 音频输出参数设置无效 |
+| | K_ERR_AO_NOT_ENABLED | 音频输出设备或通道没使能 |
+| | K_ERR_AO_NULL_PTR | 输出空指针错误 |
+| | K_ERR_AO_NOT_CFG | 音频输出设备属性未设置 |
+| | K_ERR_AO_NOT_SUPPORT | 操作不被支持 |
+| | K_ERR_AO_NOT_PERM | 操作不允许 |
+| | K_ERR_AO_NO_MEM | 系统内存不足 |
+| | K_ERR_AO_NO_BUF | 音频输出缓存不足 |
+| | K_ERR_AO_BUF_EMPTY | 音频输出缓存为空 |
+| | K_ERR_AO_BUF_FULL | 音频输出缓存为满 |
+| | K_ERR_AO_NOT_READY | 音频输出系统未初始化 |
+| | K_ERR_AO_BUSY | 音频输出系统忙 |
diff --git a/zh/01_software/board/mpp/images/01cabbb3d5c1dc60d0baa95a0f87104f.png b/zh/01_software/board/mpp/images/01cabbb3d5c1dc60d0baa95a0f87104f.png
new file mode 100644
index 0000000..cb04f48
Binary files /dev/null and b/zh/01_software/board/mpp/images/01cabbb3d5c1dc60d0baa95a0f87104f.png differ
diff --git a/zh/01_software/board/mpp/images/174b1b96f4a280ab5350f4ed5452d43f.png b/zh/01_software/board/mpp/images/174b1b96f4a280ab5350f4ed5452d43f.png
new file mode 100644
index 0000000..3b1f82c
Binary files /dev/null and b/zh/01_software/board/mpp/images/174b1b96f4a280ab5350f4ed5452d43f.png differ
diff --git a/zh/01_software/board/mpp/images/22628c5b4acf510370e51188734fe172.png b/zh/01_software/board/mpp/images/22628c5b4acf510370e51188734fe172.png
new file mode 100644
index 0000000..31e715b
Binary files /dev/null and b/zh/01_software/board/mpp/images/22628c5b4acf510370e51188734fe172.png differ
diff --git a/zh/01_software/board/mpp/images/250b6c36cbd4447bd8c734548fc3b890.png b/zh/01_software/board/mpp/images/250b6c36cbd4447bd8c734548fc3b890.png
new file mode 100644
index 0000000..7335a66
Binary files /dev/null and b/zh/01_software/board/mpp/images/250b6c36cbd4447bd8c734548fc3b890.png differ
diff --git a/zh/01_software/board/mpp/images/25246d8f3ff85d6e9b1de1b03369fbb3.png b/zh/01_software/board/mpp/images/25246d8f3ff85d6e9b1de1b03369fbb3.png
new file mode 100644
index 0000000..39d28ca
Binary files /dev/null and b/zh/01_software/board/mpp/images/25246d8f3ff85d6e9b1de1b03369fbb3.png differ
diff --git a/zh/01_software/board/mpp/images/458c9a7b50ccf347bf7ed5e8c4c5b7a8.png b/zh/01_software/board/mpp/images/458c9a7b50ccf347bf7ed5e8c4c5b7a8.png
new file mode 100644
index 0000000..c02f8a9
Binary files /dev/null and b/zh/01_software/board/mpp/images/458c9a7b50ccf347bf7ed5e8c4c5b7a8.png differ
diff --git a/zh/01_software/board/mpp/images/4a233637850b4e84b5208317666c4314.png b/zh/01_software/board/mpp/images/4a233637850b4e84b5208317666c4314.png
new file mode 100644
index 0000000..2c36d21
Binary files /dev/null and b/zh/01_software/board/mpp/images/4a233637850b4e84b5208317666c4314.png differ
diff --git a/zh/01_software/board/mpp/images/4c6fbf213dcaf35f8d035d69fcc43750.png b/zh/01_software/board/mpp/images/4c6fbf213dcaf35f8d035d69fcc43750.png
new file mode 100644
index 0000000..c23f38e
Binary files /dev/null and b/zh/01_software/board/mpp/images/4c6fbf213dcaf35f8d035d69fcc43750.png differ
diff --git a/zh/01_software/board/mpp/images/507a7bd277508dc177ebb0c4cfb49b9e.png b/zh/01_software/board/mpp/images/507a7bd277508dc177ebb0c4cfb49b9e.png
new file mode 100644
index 0000000..537f8b0
Binary files /dev/null and b/zh/01_software/board/mpp/images/507a7bd277508dc177ebb0c4cfb49b9e.png differ
diff --git a/zh/01_software/board/mpp/images/5405a8e58a3314ae95f2d737dd0c01d9.png b/zh/01_software/board/mpp/images/5405a8e58a3314ae95f2d737dd0c01d9.png
new file mode 100644
index 0000000..3a98d83
Binary files /dev/null and b/zh/01_software/board/mpp/images/5405a8e58a3314ae95f2d737dd0c01d9.png differ
diff --git a/zh/01_software/board/mpp/images/5eb26853f9444bbda3a54cdb33688a12.png b/zh/01_software/board/mpp/images/5eb26853f9444bbda3a54cdb33688a12.png
new file mode 100644
index 0000000..9d96aa9
Binary files /dev/null and b/zh/01_software/board/mpp/images/5eb26853f9444bbda3a54cdb33688a12.png differ
diff --git a/zh/01_software/board/mpp/images/659e3d039a5c3c623b3ffd6fb24ee777.png b/zh/01_software/board/mpp/images/659e3d039a5c3c623b3ffd6fb24ee777.png
new file mode 100644
index 0000000..c0859e0
Binary files /dev/null and b/zh/01_software/board/mpp/images/659e3d039a5c3c623b3ffd6fb24ee777.png differ
diff --git a/zh/01_software/board/mpp/images/69dbfc0ef3144c90f5978f1019482030.png b/zh/01_software/board/mpp/images/69dbfc0ef3144c90f5978f1019482030.png
new file mode 100644
index 0000000..a3dde64
Binary files /dev/null and b/zh/01_software/board/mpp/images/69dbfc0ef3144c90f5978f1019482030.png differ
diff --git a/zh/01_software/board/mpp/images/745a46d8e083d93521d0c5233bdaccdd.png b/zh/01_software/board/mpp/images/745a46d8e083d93521d0c5233bdaccdd.png
new file mode 100644
index 0000000..1f488d0
Binary files /dev/null and b/zh/01_software/board/mpp/images/745a46d8e083d93521d0c5233bdaccdd.png differ
diff --git a/zh/01_software/board/mpp/images/8e1970bbd7ffb862547feaf8a59cab48.png b/zh/01_software/board/mpp/images/8e1970bbd7ffb862547feaf8a59cab48.png
new file mode 100644
index 0000000..d99e373
Binary files /dev/null and b/zh/01_software/board/mpp/images/8e1970bbd7ffb862547feaf8a59cab48.png differ
diff --git a/zh/01_software/board/mpp/images/8ff8dac9c9f9b815001733e37e44e4cc.png b/zh/01_software/board/mpp/images/8ff8dac9c9f9b815001733e37e44e4cc.png
new file mode 100644
index 0000000..2369a34
Binary files /dev/null and b/zh/01_software/board/mpp/images/8ff8dac9c9f9b815001733e37e44e4cc.png differ
diff --git a/zh/01_software/board/mpp/images/95941399975cca1c16253927129d8e19.png b/zh/01_software/board/mpp/images/95941399975cca1c16253927129d8e19.png
new file mode 100644
index 0000000..f79638b
Binary files /dev/null and b/zh/01_software/board/mpp/images/95941399975cca1c16253927129d8e19.png differ
diff --git a/zh/01_software/board/mpp/images/9cd0c8d3bd975f1f19a5eec9b846d00b.png b/zh/01_software/board/mpp/images/9cd0c8d3bd975f1f19a5eec9b846d00b.png
new file mode 100644
index 0000000..0e56c24
Binary files /dev/null and b/zh/01_software/board/mpp/images/9cd0c8d3bd975f1f19a5eec9b846d00b.png differ
diff --git a/zh/01_software/board/mpp/images/9f7f41ea96a97ae9bf514535f6af1622.jpeg b/zh/01_software/board/mpp/images/9f7f41ea96a97ae9bf514535f6af1622.jpeg
new file mode 100644
index 0000000..d965eb5
Binary files /dev/null and b/zh/01_software/board/mpp/images/9f7f41ea96a97ae9bf514535f6af1622.jpeg differ
diff --git a/zh/01_software/board/mpp/images/b76dc39c5256a09c53be0e7572c2f587.png b/zh/01_software/board/mpp/images/b76dc39c5256a09c53be0e7572c2f587.png
new file mode 100644
index 0000000..3df7a4e
Binary files /dev/null and b/zh/01_software/board/mpp/images/b76dc39c5256a09c53be0e7572c2f587.png differ
diff --git a/zh/01_software/board/mpp/images/b85b814d3911bf8b3802ba97751ff941.png b/zh/01_software/board/mpp/images/b85b814d3911bf8b3802ba97751ff941.png
new file mode 100644
index 0000000..4704df5
Binary files /dev/null and b/zh/01_software/board/mpp/images/b85b814d3911bf8b3802ba97751ff941.png differ
diff --git a/zh/01_software/board/mpp/images/b96e2ea6fe9536e76af33afe46b2069e.png b/zh/01_software/board/mpp/images/b96e2ea6fe9536e76af33afe46b2069e.png
new file mode 100644
index 0000000..065bad0
Binary files /dev/null and b/zh/01_software/board/mpp/images/b96e2ea6fe9536e76af33afe46b2069e.png differ
diff --git a/zh/01_software/board/mpp/images/camera_sensor_arch.png b/zh/01_software/board/mpp/images/camera_sensor_arch.png
new file mode 100755
index 0000000..309a1d6
Binary files /dev/null and b/zh/01_software/board/mpp/images/camera_sensor_arch.png differ
diff --git a/zh/01_software/board/mpp/images/canaan-cover.png b/zh/01_software/board/mpp/images/canaan-cover.png
new file mode 100644
index 0000000..0319765
Binary files /dev/null and b/zh/01_software/board/mpp/images/canaan-cover.png differ
diff --git a/zh/01_software/board/mpp/images/cfd696fc1b6157fbf0220a4f1545a963.png b/zh/01_software/board/mpp/images/cfd696fc1b6157fbf0220a4f1545a963.png
new file mode 100644
index 0000000..6cd9636
Binary files /dev/null and b/zh/01_software/board/mpp/images/cfd696fc1b6157fbf0220a4f1545a963.png differ
diff --git a/zh/01_software/board/mpp/images/d71726ec1aa4be0868689b0b36beaa4f.png b/zh/01_software/board/mpp/images/d71726ec1aa4be0868689b0b36beaa4f.png
new file mode 100644
index 0000000..2af6e34
Binary files /dev/null and b/zh/01_software/board/mpp/images/d71726ec1aa4be0868689b0b36beaa4f.png differ
diff --git a/zh/01_software/board/mpp/images/d7197713d3821fdd3e5c0f2b10dfd5b1.png b/zh/01_software/board/mpp/images/d7197713d3821fdd3e5c0f2b10dfd5b1.png
new file mode 100644
index 0000000..216b6f7
Binary files /dev/null and b/zh/01_software/board/mpp/images/d7197713d3821fdd3e5c0f2b10dfd5b1.png differ
diff --git a/zh/01_software/board/mpp/images/d8ea12750bef3150afebf98c8a4563fd.jpeg b/zh/01_software/board/mpp/images/d8ea12750bef3150afebf98c8a4563fd.jpeg
new file mode 100644
index 0000000..0b8d93c
Binary files /dev/null and b/zh/01_software/board/mpp/images/d8ea12750bef3150afebf98c8a4563fd.jpeg differ
diff --git a/zh/01_software/board/mpp/images/dca3cfa887a526c493abced31b59afd2.png b/zh/01_software/board/mpp/images/dca3cfa887a526c493abced31b59afd2.png
new file mode 100644
index 0000000..bb8f917
Binary files /dev/null and b/zh/01_software/board/mpp/images/dca3cfa887a526c493abced31b59afd2.png differ
diff --git a/zh/01_software/board/mpp/images/e0df5cfd79b26cd1c688cb8f82000188.png b/zh/01_software/board/mpp/images/e0df5cfd79b26cd1c688cb8f82000188.png
new file mode 100644
index 0000000..d258e48
Binary files /dev/null and b/zh/01_software/board/mpp/images/e0df5cfd79b26cd1c688cb8f82000188.png differ
diff --git a/zh/01_software/board/mpp/images/e20100e34c268ad615e69966cb28e5a6.png b/zh/01_software/board/mpp/images/e20100e34c268ad615e69966cb28e5a6.png
new file mode 100644
index 0000000..3273784
Binary files /dev/null and b/zh/01_software/board/mpp/images/e20100e34c268ad615e69966cb28e5a6.png differ
diff --git a/zh/01_software/board/mpp/images/e49f8a05613f3b2524e3dc075009146e.jpeg b/zh/01_software/board/mpp/images/e49f8a05613f3b2524e3dc075009146e.jpeg
new file mode 100644
index 0000000..76f56fa
Binary files /dev/null and b/zh/01_software/board/mpp/images/e49f8a05613f3b2524e3dc075009146e.jpeg differ
diff --git a/zh/01_software/board/mpp/images/e57bfe4e5657980663f22e7cdef1f182.jpeg b/zh/01_software/board/mpp/images/e57bfe4e5657980663f22e7cdef1f182.jpeg
new file mode 100644
index 0000000..edf81ef
Binary files /dev/null and b/zh/01_software/board/mpp/images/e57bfe4e5657980663f22e7cdef1f182.jpeg differ
diff --git a/zh/01_software/board/mpp/images/e99b3eec46b58875ae936ea4ab23d86b.png b/zh/01_software/board/mpp/images/e99b3eec46b58875ae936ea4ab23d86b.png
new file mode 100644
index 0000000..3806d29
Binary files /dev/null and b/zh/01_software/board/mpp/images/e99b3eec46b58875ae936ea4ab23d86b.png differ
diff --git a/zh/01_software/board/mpp/images/fb853b016887c1d58cc45f4507d9276c.png b/zh/01_software/board/mpp/images/fb853b016887c1d58cc45f4507d9276c.png
new file mode 100644
index 0000000..f5c14e0
Binary files /dev/null and b/zh/01_software/board/mpp/images/fb853b016887c1d58cc45f4507d9276c.png differ
diff --git a/zh/01_software/board/mpp/images/logo.png b/zh/01_software/board/mpp/images/logo.png
new file mode 100644
index 0000000..aa48558
Binary files /dev/null and b/zh/01_software/board/mpp/images/logo.png differ
diff --git a/zh/01_software/board/mpp/images/osd_formula.png b/zh/01_software/board/mpp/images/osd_formula.png
new file mode 100755
index 0000000..fc80238
Binary files /dev/null and b/zh/01_software/board/mpp/images/osd_formula.png differ
diff --git a/zh/01_software/board/mpp/images/sha256.png b/zh/01_software/board/mpp/images/sha256.png
new file mode 100755
index 0000000..601b89e
Binary files /dev/null and b/zh/01_software/board/mpp/images/sha256.png differ
diff --git "a/zh/01_software/board/osdrv/K230_DRM_API\345\217\202\350\200\203.md" "b/zh/01_software/board/osdrv/K230_DRM_API\345\217\202\350\200\203.md"
new file mode 100644
index 0000000..0f33b31
--- /dev/null
+++ "b/zh/01_software/board/osdrv/K230_DRM_API\345\217\202\350\200\203.md"
@@ -0,0 +1,425 @@
+# K230 DRM使用指南
+
+
+
+版权所有©2023北京嘉楠捷思信息技术有限公司
+
+
+
+## 免责声明
+
+您购买的产品、服务或特性等应受北京嘉楠捷思信息技术有限公司(“本公司”,下同)及其关联公司的商业合同和条款的约束,本文档中描述的全部或部分产品、服务或特性可能不在您的购买或使用范围之内。除非合同另有约定,本公司不对本文档的任何陈述、信息、内容的正确性、可靠性、完整性、适销性、符合特定目的和不侵权提供任何明示或默示的声明或保证。除非另有约定,本文档仅作为使用指导参考。
+
+由于产品版本升级或其他原因,本文档内容将可能在未经任何通知的情况下,不定期进行更新或修改。
+
+## 商标声明
+
+、“嘉楠”和其他嘉楠商标均为北京嘉楠捷思信息技术有限公司及其关联公司的商标。本文档可能提及的其他所有商标或注册商标,由各自的所有人拥有。
+
+**版权所有 © 2023北京嘉楠捷思信息技术有限公司。保留一切权利。**
+非经本公司书面许可,任何单位和个人不得擅自摘抄、复制本文档内容的部分或全部,并不得以任何形式传播。
+
+
+
+## 目录
+
+[TOC]
+
+## 前言
+
+### 概述
+
+本文档主要介绍DRM驱动及其用户态接口libdrm库
+
+### 读者对象
+
+本文档(本指南)主要适用于以下人员:
+
+- 技术支持工程师
+- 软件开发工程师
+
+### 缩略词定义
+
+| 简称 | 说明 |
+| --- | --- |
+| DRM | Direct Rendering Manager |
+| KMS | Kernel Mode Setting
+| GEM | Graphics Execution Manager
+
+### 修订记录
+
+| 文档版本号 | 修改说明 | 修改者 | 日期 |
+| --- | --- | --- | --- |
+| V1.0 | 初版 | 王权 | 2023/06/29 |
+
+## 1. DRM简介
+
+DRM是linux内核中负责与显卡交互的管理架构,用户程序可以很方便的利用DRM提供的API,实现显示控制、3D渲染、视频编解码、GPU计算等工作
+
+### 1.1 DRM架构特点
+
+DRM是当前Linux内核中主流的图形显示框架,相比于传统的FB架构,具有如下特点:
+
+1. DRM架构原生支持多图层合成,FB架构原生不支持多图层合成
+1. DRM架构原生支持VSYNC、DMA_BUF、Fence机制
+1. DRM架构统一管理渲染和显示驱动,让软件开发和维护更简单
+
+### 1.2 DRM架构组成
+
+从整体架构来说,DRM主要分成三个部分:
+
+- libdrm
+
+ libdrm会对底层接口进行封装,向用户态提供通用的API接口
+
+ libdrm内部还提供modetest程序,用于查询DRM设备的详细信息,同时还可以进行基本的显示测试
+- KMS
+
+ KMS表示内核模式设置,主要设置显示分辨率、颜色空间、刷新率以及显示buffer切换和多图层合成
+- GEM
+
+ 显存管理,负责显存分配和释放
+
+## 2. modetest使用说明
+
+modetest是由libdrm提供的测试程序,可以查询DRM设备的详细信息,同时还可以进行基本的显示测试
+
+### 2.1 查询K230 DRM详细信息
+
+具体指令如下所示:
+
+```sh
+[root@canaan ~ ]#modetest -M canaan-drm
+Encoders:
+id crtc type possible crtcs possible clones
+37 36 DSI 0x00000001 0x00000001
+
+Connectors:
+id encoder status name size (mm) modes encoders
+38 37 connected DSI-1 68x120 1 37
+ modes:
+ index name refresh (Hz) hdisp hss hse htot vdisp vss vse vtot
+ #0 1080x1920 30.00 1080 1310 1330 1350 1920 1925 1931 1939 78529 flags: ; type: preferred, driver
+ props:
+ 1 EDID:
+ flags: immutable blob
+ blobs:
+
+ value:
+ 2 DPMS:
+ flags: enum
+ enums: On=0 Standby=1 Suspend=2 Off=3
+ value: 0
+ 5 link-status:
+ flags: enum
+ enums: Good=0 Bad=1
+ value: 0
+ 6 non-desktop:
+ flags: immutable range
+ values: 0 1
+ value: 0
+ 4 TILE:
+ flags: immutable blob
+ blobs:
+
+ value:
+
+CRTCs:
+id fb pos size
+36 0 (0,0) (1080x1920)
+ #0 1080x1920 30.00 1080 1310 1330 1350 1920 1925 1931 1939 78529 flags: ; type: preferred, driver
+ props:
+ 24 VRR_ENABLED:
+ flags: range
+ values: 0 1
+ value: 0
+ 28 GAMMA_LUT:
+ flags: blob
+ blobs:
+
+ value:
+ 29 GAMMA_LUT_SIZE:
+ flags: immutable range
+ values: 0 4294967295
+ value: 256
+
+Planes:
+id crtc fb CRTC x,y x,y gamma size possible crtcs
+31 0 0 0,0 0,0 0 0x00000001
+ formats: NV12 NV21 NV16 NV61
+ props:
+ 8 type:
+ flags: immutable enum
+ enums: Overlay=0 Primary=1 Cursor=2
+ value: 0
+32 0 0 0,0 0,0 0 0x00000001
+ formats: AR24 AR12 AR15 RG24 RG16
+ props:
+ 8 type:
+ flags: immutable enum
+ enums: Overlay=0 Primary=1 Cursor=2
+ value: 1
+33 0 0 0,0 0,0 0 0x00000001
+ formats: AR24 AR12 AR15 RG24 RG16
+ props:
+ 8 type:
+ flags: immutable enum
+ enums: Overlay=0 Primary=1 Cursor=2
+ value: 2
+34 0 0 0,0 0,0 0 0x00000001
+ formats: AR24 AR12 AR15 RG24 RG16
+ props:
+ 8 type:
+ flags: immutable enum
+ enums: Overlay=0 Primary=1 Cursor=2
+ value: 0
+35 0 0 0,0 0,0 0 0x00000001
+ formats: AR24 AR12 AR15 RG24 RG16
+ props:
+ 8 type:
+ flags: immutable enum
+ enums: Overlay=0 Primary=1 Cursor=2
+ value: 0
+
+Frame buffers:
+id size pitch
+
+[root@canaan ~ ]#
+
+```
+
+上述信息即K230 DRM详细信息,以下是简要说明:
+
+| 模块ID | 模块名称 | 模块说明 |
+| --- | --- | --- |
+| 37 | Encoder | 无 |
+| 38 | Connector | 无 |
+| 36 | CRTC | 分辨率支持:1080x1920 |
+| 31 | video图层 | 颜色空间支持:NV12、NV21、NV16、NV61 |
+| 32 | OSD图层 | 颜色空间支持:AR24、AR12、AR15、RG24、RG16 |
+| 33 | OSD图层 | 颜色空间支持:AR24、AR12、AR15、RG24、RG16 |
+| 34 | OSD图层 | 颜色空间支持:AR24、AR12、AR15、RG24、RG16 |
+| 35 | OSD图层 | 颜色空间支持:AR24、AR12、AR15、RG24、RG16 |
+
+AR24表示ARGB8888
+
+AR12表示ARGB4444
+
+AR15表示ARGB1555
+
+RG24表示RGB888
+
+RG16表示RGB565
+
+### 2.2 video图层输出smpte彩条,颜色空间为NV12
+
+具体指令如下所示:
+
+```sh
+modetest -M canaan-drm -D 0 -a -s 38@36:1080x1920-30 -P 31@36:1080x1920@NV12 -v -F smpte
+```
+
+下图所示为LCD显示内容:
+
+
+
+### 2.3 OSD图层输出tiles彩条,颜色空间为AR24,即ARGB8888
+
+具体指令如下
+
+```sh
+modetest -M canaan-drm -D 0 -a -s 38@36:1080x1920-30 -P 32@36:1080x1920@AR24 -v -F tiles
+```
+
+下图所示为LCD显示内容:
+
+
+
+### 2.4 OSD图层输出tiles彩条,颜色空间为RG16,即RGB565
+
+具体指令如下所示:
+
+```sh
+modetest -M canaan-drm -D 0 -a -s 38@36:1080x1920-30 -P 32@36:1080x1920@RG16 -v -F tiles
+```
+
+下图所示为LCD显示内容:
+
+
+
+## 3. DRM API介绍
+
+### 3.1 打开DRM设备
+
+```c
+ fd = open("/dev/dri/card0", O_RDWR | O_CLOEXEC);
+ if (fd < 0) {
+ fprintf(stderr, "open card0 error \n");
+ return -1;
+ }
+
+```
+
+### 3.2 检索DRM资源
+
+```c
+drmModeResPtr drmModeGetResources(int fd);
+
+typedef struct _drmModeRes {
+
+ int count_fbs;
+ uint32_t *fbs;
+
+ int count_crtcs;
+ uint32_t *crtcs;
+
+ int count_connectors;
+ uint32_t *connectors;
+
+ int count_encoders;
+ uint32_t *encoders;
+
+ uint32_t min_width, max_width;
+ uint32_t min_height, max_height;
+} drmModeRes, *drmModeResPtr;
+
+```
+
+代码调用实例如下:
+
+```c
+ res = drmModeGetResources(fd);
+ if (res == NULL) {
+ fprintf(stderr, "drmModeGetResources error \n");
+ return -1;
+ }
+ conn_id = res->connectors[0];
+ crtc_id = res->crtcs[0];
+
+```
+
+### 3.3 使能或者禁止DRM相关特性
+
+```c
+int drmSetClientCap(int fd, uint64_t capability, uint64_t value);
+```
+
+代码调用实例如下:
+
+```c
+ ret = drmSetClientCap(fd, DRM_CLIENT_CAP_UNIVERSAL_PLANES, 1);
+ if (ret) {
+ fprintf(stderr, "drmSetClientCap DRM_CLIENT_CAP_UNIVERSAL_PLANES error \n");
+ return -1;
+ }
+
+ ret = drmSetClientCap(fd, DRM_CLIENT_CAP_ATOMIC, 1);
+ if (ret) {
+ fprintf(stderr, "drmSetClientCap DRM_CLIENT_CAP_ATOMIC error \n");
+ return -1;
+ }
+```
+
+### 3.4 检索图层资源
+
+```c
+drmModePlaneResPtr drmModeGetPlaneResources(int fd);
+
+typedef struct _drmModePlaneRes {
+ uint32_t count_planes;
+ uint32_t *planes;
+} drmModePlaneRes, *drmModePlaneResPtr;
+
+```
+
+代码调用实例如下:
+
+```c
+ plane_res = drmModeGetPlaneResources(fd);
+ if (plane_res == NULL) {
+ fprintf(stderr, "drmModeGetPlaneResources error \n");
+ return -1;
+ }
+ plane_id = plane_res->planes[1];
+
+```
+
+K230 DRM中,图层对应关系如下所示:
+
+plane_res->planes[0] 表示Video层
+
+plane_res->planes[1] ~ plane_res->planes[4] 表示OSD层
+
+### 3.5 获得Connector
+
+```c
+drmModeConnectorPtr drmModeGetConnector(int fd, uint32_t connector_id);
+
+typedef struct _drmModeConnector {
+ uint32_t connector_id;
+ uint32_t encoder_id; /**< Encoder currently connected to */
+ uint32_t connector_type;
+ uint32_t connector_type_id;
+ drmModeConnection connection;
+ uint32_t mmWidth, mmHeight; /**< HxW in millimeters */
+ drmModeSubPixel subpixel;
+
+ int count_modes;
+ drmModeModeInfoPtr modes;
+
+ int count_props;
+ uint32_t *props; /**< List of property ids */
+ uint64_t *prop_values; /**< List of property values */
+
+ int count_encoders;
+ uint32_t *encoders; /**< List of encoder ids */
+} drmModeConnector, *drmModeConnectorPtr;
+
+```
+
+代码调用实例如下:
+
+```c
+ conn = drmModeGetConnector(fd, conn_id);
+ if (conn == NULL) {
+ fprintf(stderr, "drmModeGetConnector error \n");
+ return -1;
+ }
+
+```
+
+### 3.6 申请DRM DUMB缓冲区
+
+代码调用实例如下:
+
+```c
+ creq.width = 1080;
+ creq.height = 1920;
+ creq.bpp = 32;
+ creq.fourcc = DRM_FORMAT_ARGB8888;
+ ret = drmIoctl(fd, DRM_IOCTL_MODE_CREATE_DUMB, &creq);
+ if (ret < 0) {
+ fprintf(stderr, "cannot create dumb buffer (%d): %m\n",
+ errno);
+ return -errno;
+ }
+
+```
+
+### 3.7 提交DRM请求
+
+代码调用实例如下:
+
+```c
+int drmModeAtomicCommit(int fd,
+ drmModeAtomicReqPtr req,
+ uint32_t flags,
+ void *user_data);
+
+```
+
+## 4. 注意事项
+
+1. K230 DRM开发测试依赖LCD屏幕
+
+1. K230 DRM内部各个模块ID并不是一成不变的,请根据各模块实际ID进行开发和测试
diff --git "a/zh/01_software/board/osdrv/K230_PMU_\344\275\277\347\224\250\346\214\207\345\215\227.md" "b/zh/01_software/board/osdrv/K230_PMU_\344\275\277\347\224\250\346\214\207\345\215\227.md"
new file mode 100644
index 0000000..bc30adf
--- /dev/null
+++ "b/zh/01_software/board/osdrv/K230_PMU_\344\275\277\347\224\250\346\214\207\345\215\227.md"
@@ -0,0 +1,283 @@
+# K230 PMU使用指南
+
+
+
+版权所有©2023北京嘉楠捷思信息技术有限公司
+
+
+
+## 免责声明
+
+您购买的产品、服务或特性等应受北京嘉楠捷思信息技术有限公司(“本公司”,下同)及其关联公司的商业合同和条款的约束,本文档中描述的全部或部分产品、服务或特性可能不在您的购买或使用范围之内。除非合同另有约定,本公司不对本文档的任何陈述、信息、内容的正确性、可靠性、完整性、适销性、符合特定目的和不侵权提供任何明示或默示的声明或保证。除非另有约定,本文档仅作为使用指导参考。
+
+由于产品版本升级或其他原因,本文档内容将可能在未经任何通知的情况下,不定期进行更新或修改。
+
+## 商标声明
+
+、“嘉楠”和其他嘉楠商标均为北京嘉楠捷思信息技术有限公司及其关联公司的商标。本文档可能提及的其他所有商标或注册商标,由各自的所有人拥有。
+
+**版权所有 © 2023北京嘉楠捷思信息技术有限公司。保留一切权利。**
+非经本公司书面许可,任何单位和个人不得擅自摘抄、复制本文档内容的部分或全部,并不得以任何形式传播。
+
+
+
+## 目录
+
+[TOC]
+
+## 前言
+
+### 概述
+
+本文档主要描述PMU模块具体使用方法及SDK配置编译方法,其中包括软硬件环境搭建,并对控制接口进行介绍。
+
+### 读者对象
+
+本文档(本指南)主要适用于以下人员:
+
+- 技术支持工程师
+- 软件开发工程师
+
+### 缩略词定义
+
+| 简称 | 说明 |
+| --- | --- |
+| PMU | Power Management Unit |
+
+### 修订记录
+
+| 文档版本号 | 修改说明 | 修改者 | 日期 |
+| --- | --- | --- | --- |
+| V1.0 | 初版 | 张涛 | 2023/05/19 |
+
+## 1. 功能介绍
+
+PMU模块提供了6个输入和2个输出端口,每个端口功能如下:
+
+1. INT0被默认用作开关机按键,支持长按开机、长按关机事件上报、超长按强制关机、电平或边沿事件上报,支持去抖动,两种长按时间可配
+1. INT1支持电平或边沿检测、边沿计数检测,均支持触发开机和上报事件,支持去抖动,边沿计数值可配(建议不要同时打开两种检测模式,边沿检测功能会被覆盖)
+1. INT2支持电平或边沿检测,支持触发开机和上报事件,支持去抖动
+1. INT3支持电平或边沿检测,支持触发开机和上报事件,支持去抖动
+1. INT4支持电平或边沿检测,支持触发开机和上报事件(建议使用边沿检测)
+1. INT5支持电平或边沿检测,支持触发开机和上报事件(建议使用边沿检测)
+1. OUTPUT0用于控制PMIC
+1. OUTPUT1暂未使用
+
+PMU模块还提供了64Byte的log存储功能,其中最后4Byte被驱动使用,剩余60Byte留给用户
+
+## 2. 用户控制
+
+用户可通过设备树和sysfs来控制PMU,系统启动时通过设备树来配置PMU,启动后用户还可通过sysfs动态配置PMU
+
+### 2.1 PMU设备树配置
+
+```c
+pmu: pmu@0x91000000 {
+ compatible = "kendryte, k230-pmu";
+ reg = <0x0 0x91000000 0x0 0xb0>;
+ interrupt-parent = <&intc>;
+ interrupts = <175>;
+ status = "disabled";
+ /*
+ int0 {
+ force-powerdown-value = <320000>;
+ power-event-value = <96000>;
+ debounce-value = <256>;
+ type = ;
+ wakeup;
+ event;
+ };
+ int1 {
+ debounce-value = <256>;
+ edge-cnt-type = ;
+ edge-cnt-value = <1>;
+ edge-cnt-wakeup;
+ edge-cnt-event;
+ type = ;
+ wakeup;
+ event;
+ };
+ int2 {
+ debounce-value = <256>;
+ type = ;
+ wakeup;
+ event;
+ };
+ int3 {
+ debounce-value = <256>;
+ type = ;
+ wakeup;
+ event;
+ };
+ int4 {
+ type = ;
+ wakeup;
+ event;
+ };
+ int5 {
+ type = ;
+ wakeup;
+ event;
+ };
+ rtc {
+ alarm-wakeup;
+ alarm-event;
+ tick-wakeup;
+ tick-event;
+ };
+ */
+};
+```
+
+主要字段含义:
+
+- `force-powerdown-value` 超长按强制关机时间
+- `power-event-value` 长按开机及长按关机事件时间
+- `debounce-value` 去抖动时间
+- `type` 检测类型,支持上升沿、下降沿、高电平、低电平
+- `wakeup` 使能开机唤醒红能
+- `event` 使能事件上报功能
+- `edge-cnt-type` 检测类型,支持上升沿、下降沿
+- `edge-cnt-value` 边沿计数值
+
+所有时间以(1/32768)秒为单位,例如327680代表10秒
+
+### 2.2 PMU文件控制
+
+PMU sysfs位于`/sys/devices/platform/soc/91000000.pmu`目录下,文件结构如下:
+
+```sh
+.
+|-- driver -> ../../../../bus/platform/drivers/k230-pmu
+|-- driver_override
+|-- int0
+| |-- debounce_value
+| |-- event
+| |-- force_powerdown_value
+| |-- power_event_value
+| |-- type
+| `-- wakeup
+|-- int1
+| |-- debounce_value
+| |-- edge_cnt_event
+| |-- edge_cnt_type
+| |-- edge_cnt_value
+| |-- edge_cnt_wakeup
+| |-- event
+| |-- type
+| `-- wakeup
+|-- int2
+| |-- debounce_value
+| |-- event
+| |-- type
+| `-- wakeup
+|-- int3
+| |-- debounce_value
+| |-- event
+| |-- type
+| `-- wakeup
+|-- int4
+| |-- event
+| |-- type
+| `-- wakeup
+|-- int5
+| |-- event
+| |-- type
+| `-- wakeup
+|-- modalias
+|-- of_node -> ../../../../firmware/devicetree/base/soc/pmu@0x91000000
+|-- pmu
+| |-- pmu_logs
+| |-- pmu_regs
+| |-- pmu_status
+| `-- wakeup_source
+|-- rtc
+| |-- alarm_event
+| |-- alarm_wakeup
+| |-- tick_event
+| `-- tick_wakeup
+|-- subsystem -> ../../../../bus/platform
+`-- uevent
+```
+
+主要文件功能:
+
+- `pmu/pmu_status` PMU状态(只读)
+ - `PMU_RESET` PMU被断电
+ - `SOC_FORCE_PD` SoC被强制断电
+ - `SOC_NORMAL_PD` SoC被正常断电
+ - `SOC_RESET` SoC被复位
+- `pmu/wakeup_source` 系统唤醒源(只读)
+ INT0,INT1,INT2,INT3,INT4,INT5,RTC_ALARM,RTC_TICK
+- `pmu/pmu_logs` 用户LOG文件(二进制文件,读写需要4字节对齐)
+- `pmu/pmu_regs` PMU调试(二进制文件,读写需要4字节对齐)
+- `int0/force_powerdown_value` 超长按强制关机时间
+- `int0/power_event_value` 长按开机及长按关机事件时间
+- `int1/edge_cnt_type` 检测类型,有效值"rising"、"falling"
+- `int1/edge_cnt_value` 边沿计数值
+- `*/debounce_value` 去抖动时间
+- `*/type` 检测类型,有效值"rising"、"falling"、"low"、"high"
+- `*/*wakeup` 开机唤醒,有效值"enabled"、"disabled"
+- `*/*event` 事件上报,有效值"enabled"、"disabled"
+
+例如使能INT1上升沿开机唤醒:
+
+```sh
+cd /sys/devices/platform/soc/91000000.pmu/int1
+echo rising > type
+echo enabled > wakeup
+```
+
+例如使能INT2下降沿事件上报:
+
+```sh
+cd /sys/devices/platform/soc/91000000.pmu/int2
+echo falling > type
+echo enabled > event
+```
+
+### 2.3 PMU事件上报
+
+PMU上报事件使用input子系统,上报事件码为`EV_KEY`,用户可在收到相应事件后进行业务处理。例如收到`KEY_POWER`键值,用户可以执行关机准备和调用`poweroff`命令关机
+
+可以使用`evtest`工具进行测试,事件表如下:
+| 动作 | 按键值 |
+| :-: | :-: |
+| INT0长按关机 | KEY_POWER |
+| INT0电平或边沿 | BTN_0 |
+| INT1电平或边沿或边沿计数 | BTN_1 |
+| INT2电平或边沿 | BTN_2 |
+| INT3电平或边沿 | BTN_3 |
+| INT4电平或边沿 | BTN_4 |
+| INT5电平或边沿 | BTN_5 |
+| RTC_ALARM | BTN_6 |
+| RTC_TICK | BTN_7 |
+
+### 2.4 PMU关机控制
+
+1. 使用`poweroff`命令关机
+1. 通过超长按INT0按键来强制关机(不推荐,除非系统宕机。*系统宕机后强制关机,会导致不能PMU唤醒*)
+
+## 3. 硬件连接
+
+使用PMU时需要按照以下方式设置EVB板
+
+1. 使用跳线帽连接J1接口的PIN13(OUT0)和PIN14(PW_EN),注意要断开PIN15(SYS_SW)和PIN16(PW_EN)
+1. 根据使用不同的唤醒源使用跳线连接PIN2(SYS_ON_OFF)与对应的PIN,这时按键K1可控制INT的状态,按下按键为高电平,松开为低电平
+ | 唤醒源 | PIN | 标签 |
+ | :-: | :-: | :-: |
+ | INT0 | 1 | INT0 |
+ | INT1 | 3 | INT1 |
+ | INT2 | 5 | INT2 |
+ | INT3 | 7 | INT3 |
+ | INT4 | 9 | INT4 |
+ | INT5 | 11 | INT5 |
+
+使用INT0用作唤醒源的连接示意图:
+
+
+
+## 4. 注意事项
+
+1. PMU模块在设备树中默认是未使能的,如果需要使用请在设备树中使能
+1. 使用PMU模块时一定要通过任意INT唤醒PMU模块,否则kernel初始化驱动时会卡死
diff --git "a/zh/01_software/board/osdrv/K230_SDK_IoT_WiFi_AiW4211LV10_\344\275\277\347\224\250\346\214\207\345\215\227.md" "b/zh/01_software/board/osdrv/K230_SDK_IoT_WiFi_AiW4211LV10_\344\275\277\347\224\250\346\214\207\345\215\227.md"
new file mode 100755
index 0000000..89ffb15
--- /dev/null
+++ "b/zh/01_software/board/osdrv/K230_SDK_IoT_WiFi_AiW4211LV10_\344\275\277\347\224\250\346\214\207\345\215\227.md"
@@ -0,0 +1,530 @@
+# K230 SDK IoT WiFi AiW4211LV10使用指南
+
+
+
+版权所有©2023北京嘉楠捷思信息技术有限公司
+
+
+
+## 免责声明
+
+您购买的产品、服务或特性等应受北京嘉楠捷思信息技术有限公司(“本公司”,下同)及其关联公司的商业合同和条款的约束,本文档中描述的全部或部分产品、服务或特性可能不在您的购买或使用范围之内。除非合同另有约定,本公司不对本文档的任何陈述、信息、内容的正确性、可靠性、完整性、适销性、符合特定目的和不侵权提供任何明示或默示的声明或保证。除非另有约定,本文档仅作为使用指导参考。
+
+由于产品版本升级或其他原因,本文档内容将可能在未经任何通知的情况下,不定期进行更新或修改。
+
+## 商标声明
+
+、“嘉楠”和其他嘉楠商标均为北京嘉楠捷思信息技术有限公司及其关联公司的商标。本文档可能提及的其他所有商标或注册商标,由各自的所有人拥有。
+
+**版权所有 © 2023北京嘉楠捷思信息技术有限公司。保留一切权利。**
+非经本公司书面许可,任何单位和个人不得擅自摘抄、复制本文档内容的部分或全部,并不得以任何形式传播。
+
+
+
+## 目录
+
+[TOC]
+
+## 前言
+
+### 概述
+
+本文档主要描述IoT WiFi AiW4211LV10具体使用方法及SDK配置编译方法,其中包括软硬件环境搭建,驱动加载及配置工具使用等信息,并对WiFi控制接口进行介绍。
+
+### 读者对象
+
+本文档(本指南)主要适用于以下人员:
+
+- 技术支持工程师
+- 软件开发工程师
+
+### 缩略词定义
+
+| 简称 | 说明 |
+|------|------|
+| | |
+| | |
+
+### 修订记录
+
+| 文档版本号 | 修改说明 | 修改者 | 日期 |
+|------------|----------|--------|------------|
+| V1.0 | 初版 | 徐百坤 | 2023/04/24 |
+
+## 1. 功能介绍
+
+AiW4211LV10是一款低功耗IoT WiFi芯片,我司采用该芯片平台设计了一款AiW4211LV10开发板,该开发板可通过TF卡插槽接入K230 EVB板。K230 EVB加载AiW4211LV10驱动之后,可以生成wlan0无线网卡,实现网络数据通信。
+
+
+
+图1-1 AiW4211LV10开发板
+
+WiFi主要功能如图1-1所示:
+
+
+
+图1-1 WiFi功能框图
+
+WiFi主要功能简介:
+
+- 消息通信:WiFi接收并解析Host端发送的消息指令及指令参数,触发相应事件执行
+- 网络通信:网络数据透传
+- 参数配置:建立SoftAP,接收配置参数,并触发配置事件
+- 配置存取:管理配置数据形成的配置文件,存储在flash上
+- AP接入:接入指定AP,监控接入状态并进行相应处理
+- 保活链路:建立维护与远程服务器之间的保活链路
+- 休眠:设置软硬件环境,给Host下电(依据平台特性,K230自下电),WiFi进入休眠模式
+- IO唤醒:处理button或PIR唤醒信号,恢复软硬件环境,给Host上电
+- 网络唤醒:处理来自保活链路的唤醒数据包,恢复软硬件环境,给Host上电
+
+## 2. 模块依赖
+
+硬件上依赖AiW4211LV10开发板,依赖K230 EVB开发板。软件上依赖于K230 SDK。
+
+### 2.1 软件环境
+
+K230 SDK V0.5.1及后续版本。
+AiW4211LV10 SDK。
+
+### 2.2 硬件环境
+
+K230 EVB开发板设置emmc启动,空出TF卡插槽用于AiW4211LV10开发板接入。
+开发板硬件版本及跳线见表2-1:
+
+表2-1开发板版本
+
+| **开发板** | **硬件版本** | **设置** |
+|-------------|--------------|---------------------------------------------------------------------------|
+| K230 EVB | V1.1 | POWER BY BUTTON启动模式,跳线关系: 1.JUMPER J1 1----2 2.JUMPER J1 13--14 |
+| AiW4211LV10 | V1.1 | |
+
+K230 EVB开发板飞线到AiW4211LV10开发板排针,连接关系见表2-2:
+
+表2-2 飞线关系
+
+| | **Link1** | **Link2** | **Link3** | **Link4** | **Link5** | **Link6** | **Link7** |
+|-------------------|--------------|------------------------|--------------------|------------------|--------------|--------------|---------------|
+| **K230** **排针** | TP21 (5V) | J8.PIN9 (GPIO34) | J1.PIN9 (RTC_INT4) | J1.PIN14 (PW_EN) | | | |
+| **WiFi** **排针** | J6.PIN1 (5V) | J2.PIN3 (SDIO_INT_OUT) | J6.PIN3 (WH) | J2.PIN2 (GPIO2) | J2.PIN4 (TX) | J2.PIN5 (RX) | J2.PIN6 (GND) |
+| **TTL-USB** | | | | | RX | TX | GND |
+| **说明** | 5V供电线 | WiFi数据中断线 | WiFi唤醒K230中断线 | WiFi监控K230电平 | com口收发 | com口收发 | com口GND |
+
+连接说明:
+
+- TP21是5V电压测试点,需要焊接一个插针,如果K230 EVB版本为V1.0则需要连接到J5 PIN16
+- 如果使用不涉及WiFi唤醒K230 EVB则无需建立Link3
+- 如果WiFi配置成通过监控K230 core的电源状态进入休眠则建立Link4,否则不需要。
+- TTL-USB与WiFi的连线主要是为了观察WiFi的固件输出,无需要可以不连接
+- AiW4211LV10开发板排针说明见表2-3
+
+表2-3 WiFi开发板排针说明
+
+| **WIFI子板** **接口** | **信号定义** | **描述** | **电平** | **必要性** | **K230 USIP LP3 EVB** **接口** | |
+|-----------------------|--------------|-------------------|----------------------|------------|--------------------------------|-----------------------------|
+| J4 | 金手指 | SDIO_CLK/CMD/DATA | SDIO信号及GND | 3.3V | 必连 | TF卡槽 |
+| J6 | PIN1 | VDD_5V_WIFI | 供电输入_5V | POWER | 必连 | TP21(V1.1) 或J5.PIN16(V1.0) |
+| | PIN2 | GND | GND | GND | 预留 | |
+| | PIN3 | WIFI_WAKE_HOST | WIFI唤醒K230 | 1.8V | 功能信号 | J1.PIN9 |
+| | PIN4 | WIFI_UART0_TX | 串口TX,可连接K230 | 1.8V | 预留 | J8.PIN15,目前无连接需求 |
+| | PIN5 | WIFI_UART0_RX | 串口RX,可连接K230 | 1.8V | 预留 | J8.PIN13,目前无连接需求 |
+| | PIN6 | HOST_WAKE_WIFI | K230唤醒WIFI | 1.8V | 功能信号 | J8.PIN11, 目前无连接需求 |
+| J2 | PIN1 | WIFI_POWER_EN | WIFI使能,预留 | 3.3V | 预留 | |
+| | PIN2 | GPIO2 | 监控K230电平 | 3.3V | 功能信号 | J1.PIN14 |
+| | PIN3 | SDIO_INT_OUT | SDIO中断 | 1.8V | 功能信号 | J8.PIN9 |
+| | PIN4 | UART0_TXD | 调试串口TXD | 3.3V | 调试串口 | 连PC |
+| | PIN5 | UART0_RXD | 调试串口RXD | 3.3V | 调试串口 | 连PC |
+| | PIN6 | GND | GND | GND | 调试串口 | 连PC |
+| J3 | PIN1 | PIR_WAKE_HOST | PIR唤醒K230 | 1.8V | 可选 | J1.PIN待定 |
+| | PIN2 | GND | PIR供电,接PIR黑色线 | GND | \\ | \\ |
+| | PIN3 | PIR_WAKE_WiFi | PIR信号,接PIR棕色线 | 3.3V | \\ | \\ |
+| | PIN4 | VDD_3V3 | PIR供电,接PIR红色线 | POWER | \\ | \\ |
+
+## 3. 模块配置
+
+### 3.1 SDK目录结构
+
+WiFi SDK的目录结构如下:
+
+├── README.txt //简要编译及使用说明文档
+
+├── support //存放固件烧写工具BurnTool.exe,编译环境搭建说明文档及支持包
+
+├── toolchain //固件交叉编译工具链
+
+├── Makefile //编译入口Makefile,可实现一键编译
+
+├── SocChannel //WiFi驱动及配置工具源码
+
+├── AiW4211LV10 //WiFi固件源码
+
+编译驱动的工具链因与平台相关,故未放入SDK之中,如有需要请联系我们。
+
+### 3.2 定制化修改
+
+在WiFi SDK之中,为了便于固件的定制化,与硬件设计关联比较紧密的代码,需要公布且可由用户定制的SoftAP相关参数,以及自定义的被多个文件使用的全局变量等,被放置在canaan_private.h及canaan_private.c文件之中。重点项目说明见表3-1:
+
+表3-1 定制化重点项说明
+
+| **项目** | **说明** |
+|-------------------------------|-----------------------------------------------------------------------------------------------------------------------------------------|
+| CONFIG_WIFI_MONITOR_HOSTLEVEL | 使能该宏之后WiFi通过监控K230的电源状态引脚触发休眠,将忽略休眠指令 |
+| HOST_LLEVEL_TIME | 配合CONFIG_WIFI_MONITOR_HOSTLEVEL使用,电源状态引脚拉低持续HOST_LLEVEL_TIME时间将触发休眠,设置该时间是为了防抖及过滤冷启动的不稳定状态 |
+| LONG_PRESS_TIME | 长按WiFi开发板上的K4按键持续LONG_PRESS_TIME时间WiFi将建立SoftAP模式,用于配置AP接入。参考5.3.1。 |
+| TCP_SERVER_PORT | SoftAP建立之后,WiFi启动一个tcp socket server用于接收网络配置信息,TCP_SERVER_PORT是指定监听端口 |
+| g_softap_ipaddr | SoftAP的网关、掩码及ip |
+| g_softapcfg | SoftAP的热点名称及密码等 |
+| gpios_config\[\] g_gpios_config | WiFi GPIO配置表,与硬件设计相关,描述各功能GPIO的编号、功能名、方向、中断类型及触发方式和中断回调函数 |
+| kd_gpios_hoststanby | WiFi给Host下电接口,可根据平台特性实现,因K230自下电,此接口未操作任何IO |
+| kd_gpios_wakehost | WiFi给Host上电接口,可根据平台特性实现,针对K230平台,WiFi给K230 PMU发送了一个IO信号 |
+
+## 4. 固件编译
+
+### 4.1 编译环境
+
+固件编译环境搭建请参考文档《AiW4211V10/AiW4211LV10 SDK开发环境搭建 用户指南.pdf》,该文档存储于WiFi SDK的support目录。
+使用者也可以联系 成都爱旗科技有限公司(,\,\ 例如:cfg=xuyuxuan,2,Xuyuxuan123 |
+
+
+
+图 5-3 NetAssist配置运行
+
+#### 5.3.2 通过消息配置AP接入
+
+AiW4211LV10开发板支持通过消息通道配置目标AP参数(与5.3.1功能相同),除此之外还可以通过消息通道配置WiFi休眠参数和tcp keepalive参数。消息通道是K230与AiW4211LV10之间通过SDIO总线建立起来的软件通道。
+
+##### 5.3.2.1 通过配置工具配置
+
+配置步骤如下:
+
+step 1: 准备一个路由器并启动热点
+step 2: 将PC接入该热点,然后启动NetAssist,这里为简单起见使用PC+NetAssist作为远端保活服务器
+step 3: 配置NetAssist作为 tcp socket server等待WiFi保活链路的接入
+step 4: K230端根据热点信息和NetAssist启动的server信息编辑配置文件/etc/wifi.conf
+step 5: 运行配置工具client端,解析配置文件,发送配置消息:iotwifi_cli --config /etc/wifi.conf
+step 6: AiW4211LV10接收到配置参数之后,首先存储休眠参数,然后接入指定AP,最后建立tcp socket client连入NetAssist建立的 tcp socket server
+
+/etc/wifi.conf是WiFi工作参数配置文件,以json格式编写,基本上是对[wifi_config_t](#6121-wifi_config_t)结构体的映射,具体可参考6.1.2章节。文件内容如下:
+
+```c
+{
+"sleep": {
+"level": 2,
+"period": 3000,
+"wake_gpios": [5]
+},
+"conn": {
+"ssid": "xuyuxuan",
+"auth": 2,
+"key": "Xuyuxuan123",
+"bssid": "",
+"pairwise": 0
+},
+"keepalive": {
+"svrip": "192.168.50.197",
+"svrport": 5001,
+"time": 10,
+"intvl": 2,
+"probes": 5,
+"hrintvl": 60,
+"hrprobes": 5
+}
+}
+```
+
+备注: "wake_gpios": \[5\] 是一个数组项,当前数组只有一个元素5,表示WiFi可以被自身的gpio5唤醒,该IO对应按键K4,如果新添加唤醒源可以以逗号分隔追加。这取决于具体的硬件设计。
+
+
+
+图 5-4 (A)WiFi接入路由器并被分配IP (B)tcp keepalive server
+
+##### 5.3.2.2 通过调用API配置
+
+在实际的业务程序中,可以通过调用通信接口共享库libhal_iotwifi.so提供的API接口[kd_wifi_config](#6121-wifi_config_t)进行参数配置,API说明请参考6.1.1章节,配置步骤与5.3.2.1相同。
+
+5.3.2.1节当中介绍的工具iotwifi_cli也是通过调用该接口实现WiFi参数配置的。
+
+### 5.4 系统休眠
+
+#### 5.4.1 通过工具配置休眠
+
+运行配置工具client端发送休眠指令触发WiFi休眠:iotwifi_cli --dirsleep
+
+
+
+图 5-5 WiFi进入休眠log
+
+#### 5.4.2 通过调用API休眠
+
+在实际的业务程序中,可以通过调用通信接口共享库libhal_iotwifi.so提供的API接口[kd_wifi_sleep](#62-sleep接口)触发WiFi休眠,具体请参考6.2章节。
+
+工具iotwifi_cli也是通过调用该接口触发WiFi休眠的。
+
+#### 5.4.3 通过监控电平休眠
+
+K230 EVB可以实现自下电,下电之后K230 EVB开发板J1 PIN14(PW_EN)引脚的电平将会被拉低,WiFi也可以通过监控该引脚的电平触发休眠。该功能使用的前提是K230功耗管理功能正常,并在编译WiFi固件时使能宏 CONFIG_WIFI_MONITOR_HOSTLEVEL(默认不使能),使能该宏之后WiFi将忽略K230发送的sleep指令,仅依据引脚电平状态进行休眠。
+
+工具k230_pwrdown可以实现较为简单的K230 EVB双核自下电,它未做任何文件存储、状态检测等业务逻辑上的安全处理,因此只可以用于电平触发WiFi休眠的场景验证。该工具未集成到K230 SDK当中,因此需要拷贝到K230 EVB上执行:
+
+./k230_pwrdown
+
+### 5.5 系统唤醒
+
+#### 5.5.1 按键唤醒
+
+如果WiFi已进入休眠状态,短按AiW4211LV10开发板上的K4按键可唤醒WiFi,WiFi将给K230 EVB的PMU发送唤醒信号,如果此时K230 EVB处于5.4.3节配置的下电状态(非冷启动),其将被上电。
+
+
+
+图5-6 按键唤醒log
+
+#### 5.5.2 网络唤醒
+
+如果WiFi已进入休眠状态,NetAssist发送wakeup可唤醒WiFi,WiFi将给K230 EVB的PMU发送唤醒信号,如果此时K230 EVB处于5.4.3节配置的下电状态(非冷启动),其将被上电。
+
+
+
+图5-7 网络唤醒log
+
+## 6. API参考
+
+AiW4211LV10驱动加载后生成的无线网卡与一般WiFi网卡无异,因此网络通信功能无特殊API需要说明。
+除基本的网络通信外,K230与WiFi还存在两个消息通信接口,需要重点说明。
+
+### 6.1 config接口
+
+#### 6.1.1 API
+
+int kd_wifi_config([wifi_config_t](#6121-wifi_config_t) \*config)
+配置WiFi工作参数:
+
+- 配置目标AP的名称、密码、认证及加密方式
+- 配置WiFi休眠等级,苏醒周期以及可唤醒的gpio
+- 配置tcp keepalive时间参数等
+
+#### 6.1.2 数据结构
+
+##### 6.1.2.1 wifi_config_t
+
+```c
+typedef struct {
+unsigned int config_mask;
+#define CFG_MASK_SLEEP (1 << 0)
+#define CFG_MASK_CONNECT (1 << 1)
+#define CFG_MASK_KEEPALIVE (1 << 2)
+wifi_sleep_t sleep;
+wifi_connect_t conn;
+wifi_keepalive_t keepalive;
+} wifi_config_t;
+```
+
+表6-1 wifi_config_t结构体成员
+
+| config_mask | 配置目标项掩码,使能或屏蔽目标项,例如全部配置则:config_mask = CFG_MASK_SLEEP\|CFG_MASK_CONNECT\|CFG_MASK_KEEPALIVE CFG_MASK_SLEEP:配置休眠参数 CFG_MASK_CONNECT:配置AP连接参数 CFG_MASK_KEEPALIVE:配置tcp keepalive参数 |
+|--------------------------------|------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------|
+| [sleep](#6122-wifi_sleep_t) | 休眠参数 |
+| [conn](#6123-wifi_connect_t) | AP连接参数 |
+| [keepalive](#6124-wifi_keepalive_t) | tcp keepalive参数 |
+
+##### 6.1.2.2 wifi_sleep_t
+
+```c
+typedef struct
+{
+unsigned int level;
+#define WIFI_SLEEP_LIGHT 1
+#define WIFI_SLEEP_DEEP 2
+#define WIFI_SLEEP_ULTRA 3
+unsigned int period;
+union
+{
+/*
+* gpioX_wake: 0---disable, 1---enable
+*/
+struct {
+unsigned int gpio0_wake:1;
+unsigned int gpio1_wake:1;
+unsigned int gpio2_wake:1;
+unsigned int gpio3_wake:1;
+unsigned int gpio4_wake:1;
+unsigned int gpio5_wake:1;
+unsigned int gpio6_wake:1;
+unsigned int gpio7_wake:1;
+unsigned int gpio8_wake:1;
+unsigned int gpio9_wake:1;
+unsigned int gpio10_wake:1;
+unsigned int gpio11_wake:1;
+unsigned int gpio12_wake:1;
+unsigned int gpio13_wake:1;
+unsigned int gpio14_wake:1;
+};
+unsigned int wake_gpios;
+};
+} wifi_sleep_t;
+```
+
+表6-2 wifi_sleep_t结构体成员
+
+| level | 休眠等级 WIFI_SLEEP_LIGHT:浅睡 WIFI_SLEEP_DEEP:深睡,主要休眠模式 WIFI_SLEEP_ULTRA:超深睡,只有3/5/7/14号gpio可唤醒,目前不使用 |
+|------------|------------------------------------------------------------------------------------------------------------------------------------|
+| period | 苏醒周期,有效数值33\~\~4000ms。WiFi周期性从休眠态醒来,检测AP是否有发给自己的数据缓存 |
+| wake_gpios | enable或disable可唤醒WiFi的gpio(WiFi侧gpio) |
+
+##### 6.1.2.3 wifi_connect_t
+
+```c
+typedef struct
+{
+char ssid[EXT_WIFI_MAX_SSID_LEN + 1];
+ext_wifi_auth_mode auth;
+char key[EXT_WIFI_MAX_KEY_LEN + 1];
+unsigned char bssid[EXT_WIFI_MAC_LEN];
+ext_wifi_pairwise pairwise;
+} wifi_connect_t;
+```
+
+表6-3 wifi\_**connect**\_t结构体成员
+
+| ssid | AP名称 |
+|----------|--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------|
+| auth | 认证类型 EXT_WIFI_SECURITY_OPEN EXT_WIFI_SECURITY_WEP EXT_WIFI_SECURITY_WPA2PSK EXT_WIFI_SECURITY_WPAPSK_WPA2PSK_MIX EXT_WIFI_SECURITY_WPAPSK EXT_WIFI_SECURITY_WPA EXT_WIFI_SECURITY_WPA2 EXT_WIFI_SECURITY_SAE EXT_WIFI_SECURITY_WPA3_WPA2_PSK_MIX EXT_WIFI_SECURITY_UNKNOWN |
+| Key | AP密码 |
+| bssid | AP bssid,一般为AP mac地址 |
+| pairwise | 加密类型 EXT_WIFI_PARIWISE_UNKNOWN EXT_WIFI_PAIRWISE_AES EXT_WIFI_PAIRWISE_TKIP EXT_WIFI_PAIRWISE_TKIP_AES_MIX |
+
+##### 6.1.2.4 wifi_keepalive_t
+
+```c
+typedef struct
+{
+unsigned char svrip[16];
+unsigned short svrport;
+unsigned short tcp_keepalive_time;
+unsigned short tcp_keepalive_intvl;
+unsigned short tcp_keepalive_probes;
+unsigned short heartbeat_intvl;
+unsigned short heartbeat_probes;
+} wifi_keepalive_t;
+```
+
+表6-4 wifi_keepalive_t结构体成员
+
+| svrip | server端ip地址 |
+|----------------------|-------------------------------------------------------------------------|
+| svrport | server端端口号 |
+| tcp_keepalive_time | TCP层keepalive心跳包常规发送周期,秒 |
+| tcp_keepalive_intvl | TCP层keepalive心跳包无回应之后新的发送周期,秒 |
+| tcp_keepalive_probes | TCP层keepalive心跳包无回应计数超过该阈值之后,判断TCP连接异常,断开重连 |
+| heartbeat_intvl | 应用层心跳包发送周期,秒 |
+| heartbeat_probes | 应用层心跳包无回应计数超过该阈值之后,判断socket连接异常,断开重连 |
+
+### 6.2 sleep接口
+
+int kd_wifi_sleep(void)
+控制WiFi进入休眠,休眠相关参数在config API当中设置。
+
+## 7.wifi功能限制
+
+ AiW4211LV10芯片为单频wifi芯片,不支持ap和sta同时共存,当ap启动时固定在某一信道,再起sta的话sta会在不同的信道上扫描,此时ap就会断连。
+ 当通过sdio传入conf为错误配置时,AiW4211LV10会显示sta连接ap失败 串口打印 please reset conf,此时可通过iotwifi_cli传入新的正确的conf。
+ 当通过client传入sta错误配置时,wifi从ap会切换到sta模式,AiW4211LV10会显示sta连接ap失败 串口同样打印please reset conf,由于sta与ap不能同时共存,这时wifi芯片会从sta切换到ap模式重新起tcp server ,sta需要重新连接ap,作为client重新接入。
diff --git "a/zh/01_software/board/osdrv/K230_SDK_IoT_WiFi_AiW4211LV10_\351\251\261\345\212\250\345\274\200\345\217\221\346\214\207\345\215\227.md" "b/zh/01_software/board/osdrv/K230_SDK_IoT_WiFi_AiW4211LV10_\351\251\261\345\212\250\345\274\200\345\217\221\346\214\207\345\215\227.md"
new file mode 100644
index 0000000..3f2499d
--- /dev/null
+++ "b/zh/01_software/board/osdrv/K230_SDK_IoT_WiFi_AiW4211LV10_\351\251\261\345\212\250\345\274\200\345\217\221\346\214\207\345\215\227.md"
@@ -0,0 +1,480 @@
+# K230 SDK IoT WiFi AiW4211LV10驱动开发指南
+
+
+
+版权所有©2023北京嘉楠捷思信息技术有限公司
+
+
+
+## 免责声明
+
+您购买的产品、服务或特性等应受北京嘉楠捷思信息技术有限公司(“本公司”,下同)及其关联公司的商业合同和条款的约束,本文档中描述的全部或部分产品、服务或特性可能不在您的购买或使用范围之内。除非合同另有约定,本公司不对本文档的任何陈述、信息、内容的正确性、可靠性、完整性、适销性、符合特定目的和不侵权提供任何明示或默示的声明或保证。除非另有约定,本文档仅作为使用指导参考。
+
+由于产品版本升级或其他原因,本文档内容将可能在未经任何通知的情况下,不定期进行更新或修改。
+
+## 商标声明
+
+、“嘉楠”和其他嘉楠商标均为北京嘉楠捷思信息技术有限公司及其关联公司的商标。本文档可能提及的其他所有商标或注册商标,由各自的所有人拥有。
+
+**版权所有 © 2023北京嘉楠捷思信息技术有限公司。保留一切权利。**
+非经本公司书面许可,任何单位和个人不得擅自摘抄、复制本文档内容的部分或全部,并不得以任何形式传播。
+
+
+
+## 目录
+
+[TOC]
+
+## 前言
+
+### 概述
+
+本文档主要描述IoT WiFi AiW4211LV10驱动在K230 EVB平台上的开发方法,其中包括硬件环境搭建,模块编译配置方法,驱动加载及网络配置工具使用等信息,并对WiFi控制接口进行介绍。
+
+### 读者对象
+
+本文档(本指南)主要适用于以下人员:
+
+- 技术支持工程师
+- 软件开发工程师
+
+### 缩略词定义
+
+| 简称 | 说明 |
+|------|------|
+| | |
+
+### 修订记录
+
+| 文档版本号 | 修改说明 | 修改者 | 日期 |
+|------------|--------------------------------------------------------------------------------------------------------|--------|------------|
+| V1.0 | 初版 | 徐百坤 | 2023/04/08 |
+| V1.1 | 修改2.2章节,WiFi子板硬件更新到V1.1,分线链接变化 修改3.2、3.3章节,修改sdio扫描接口调用方式为间接调用 | 徐百坤 | 2023/04/13 |
+
+## 1. 功能介绍
+
+AiW4211LV10是一款低功耗IoT WiFi芯片,我司采用该芯片平台设计了一款AiW4211LV10开发板,该开发板可插入K230 EVB板的TF卡插槽实现接入。K230 EVB加载AiW4211LV10驱动之后,可以生成wlan0无线网卡,实现网络数据通信。
+
+## 2. 模块依赖
+
+硬件上依赖AiW4211LV10开发板,依赖K230 EVB开发板,K230 EVB为WiFi提供电源及中断检测连线。
+
+软件上依赖于K230 SDIO主控驱动,依赖GPIO驱动的完备,需要emmc引导启动实现。
+
+### 2.1 操作系统
+
+当前驱动支持linux 4.9、linux 4.17和linux 5.10.4
+
+### 2.2 硬件环境
+
+K230 EVB开发板设置emmc启动,空出TF卡插槽用于AiW4211LV10开发板接入。
+
+K230 EVB开发板飞线到AiW4211LV10开发板排针。连接关系如下:
+
+表 2-1 飞线关系
+
+| | Link1 | Link2 | Link3 | Link4 | Link5 |
+|----------|---------------|------------------------|--------------|--------------|---------------|
+| K230排针 | J5 PIN16 (5V) | J8 PIN9 (GPIO34) | | | |
+| WiFi排针 | J6 PIN1 (5V) | J2 PIN3 (SDIO_INT_OUT) | J2 PIN4 (TX) | J2 PIN5 (RX) | J2 PIN6 (GND) |
+| TTL-USB | | | RX | TX | GND |
+
+备注:TTL-USB与WiFi的连线主要是为了观察WiFi的固件输出,可以不连接
+
+## 3. 模块配置
+
+### 3.1 设备树修改
+
+#### 3.1.1 配置引脚function
+
+修改uboot设备树arch/riscv/dts/k230_evb.dts,配置K230 EVB IO52引脚功能为GPIO,方向为input:
+
+```c
+&iomux {
+pinctrl-names = "default";
+pinctrl-0 = <&pins>;
+pins: iomux_pins {
+pinctrl-single,pins = <
+
+......
+
+(IO52) ( 0 <;
+#size-cells = <0>;
+compatible = "canaan,k230-apb-gpio";
+reg = <0x0 0x9140c000 0x0 0x1000>;
+interrupt-controller;
+interrupt-parent = <&intc>;
+#interrupt-cells = <2>;
+interrupts = <84 IRQ_TYPE_EDGE_RISING>;
+
+port52: gpio-controller@0 {
+gpio-controller;
+#gpio-cells = <2>;
+nr-gpios = <1>;
+reg-bank = <0>;
+id = <52>;
+};
+};
+};
+```
+
+#### 3.1.3 配置SDHCI1参数
+
+修改linux设备树arch/riscv/boot/dts/kendryte/k230_evb.dtsi,配置对应sdio主控参数:
+
+```c
+sdcard: sdhci1@91581000 {
+compatible = "snps,dwcmshc-sdhci";
+reg = <0x0 0x91581000 0x0 0x1000>;
+interrupt-parent = <&intc>;
+interrupts = <144>;
+interrupt-names = "sdhci1irq";
+clocks = <&dummy_sd>,<&dummy_sd>;
+clock-names = "core", "bus";
+max-frequency = <50000000>;
+bus-width = <4>;
+//cd-gpios = <>;
+no-1-8-v;
+cap-sd-highspeed;
+sdhci,auto-cmd12;
+status = "okay";
+};
+```
+
+### 3.2 内核配置项
+
+通过内核配置将AiW4211LV10驱动编译为内核模块,并将必要的协议及驱动编入内核。
+
+使能kprobes:
+
+```c
+> General architecture-dependent options
+
+|| [*] Kprobes
+
+将cfg80211编入内核,注意需要选中 cfg80211 wireless extensions compatibility:
+
+> Networking support > Wireless
+
+│ --- Wireless │ │
+
+│ │ <*> cfg80211 - wireless configuration API │ │
+
+│ │ [ ] nl80211 testmode command │ │
+
+│ │ [ ] enable developer warnings │ │
+
+│ │ [ ] cfg80211 certification onus │ │
+
+│ │ [*] enable powersave by default │ │
+
+│ │ [ ] cfg80211 DebugFS entries │ │
+
+│ │ [*] support CRDA │ │
+
+│ │ [*] cfg80211 wireless extensions compatibility │ │
+
+│ │ [ ] lib80211 debugging messages │ │
+
+│ │ < > Generic IEEE 802.11 Networking Stack (mac80211)
+```
+
+将AiW4211LV10驱动编译成内核模块,注意需要选中 IEEE 802.11 for Host AP (Prism2/2.5/3 and WEP/TKIP/CCMP):
+
+```c
+> Device Drivers > Network device support > Wireless LAN
+
+│ --- Wireless LAN │ │
+
+│ │ [ ] mac80211-based legacy WDS support │ │
+
+│ │ [ ] ADMtek devices │ │
+
+│ │ [*] Aich devices │ │
+
+│ │ Aich AiW4211LV10 (SDIO) support │
+
+│ │ [ ] Atheros/Qualcomm devices │ │
+
+│ │ [ ] Atmel devices │ │
+
+│ │ [ ] Broadcom devices │ │
+
+│ │ [ ] Cisco devices │ │
+
+│ │ [ ] Intel devices │ │
+
+│ │ [*] Intersil devices │ │
+
+│ │ <*> IEEE 802.11 for Host AP (Prism2/2.5/3 and WEP/TKIP/CCMP)
+
+│ │ [ ] Support downloading firmware images with Host AP driver │ │
+
+│ │ [ ] Marvell devices │ │
+
+│ │ [ ] MediaTek devices │ │
+
+│ │ [ ] Microchip devices
+```
+
+### 3.3 SDIO主控增加扫描接口
+
+AiW4211LV10驱动需要依据WiFi所接入的槽位发起SDIO扫描,因此特封装plat_sdio_rescan接口函数。修改drivers/mmc/host/sdhci-of-dwcmshc.c文件如下:
+
+```c
+static unsigned int slot_index = 0;
+static struct mmc_host \*__mmc__host[3] = {NULL};
+int plat_sdio_rescan(int slot)
+{
+struct mmc_host \*mmc = \__mmc__host[slot];
+if (mmc == NULL) {
+pr_err("invalid mmc, please check the argument\\n");
+return -EINVAL;
+}
+
+mmc_detect_change(mmc, 0);
+return 0;
+}
+
+static int dwcmshc_probe(struct platform_device \*pdev)
+{
+
+......
+
+priv->bus_clk = devm_clk_get(&pdev-\>dev, "bus");
+if (!IS_ERR(priv->bus_clk))
+clk_prepare_enable(priv->bus_clk);
+__mmc__host[slot_index++] = host->mmc;
+err = mmc_of_parse(host->mmc);
+if (err)
+goto err_clk;
+
+......
+
+}
+```
+
+## 4. 模块编译
+
+在SDK顶层执行make linux,随内核一同编译,ko临时存储在output/k230_evb_defconfig/little/linux/drivers/net/wireless/aich/aiw4211lv10/目录。
+
+## 5. 模块启动
+
+### 5.1 WiFi固件
+
+在K230 SDK当中WiFi固件AiW4211L_demo_allinone.bin以二进制文件形式提供,如需源码请联系我们。
+
+固件存储路径:k230_sdk/src/little/utils/firmware/AiW4211L_demo_allinone.bin
+
+### 5.2 驱动加载
+
+在硬件环境配置完成后上电启动,执行以下指令即可实现驱动加载:
+
+modprobe aiw4211lv10 或者 modprobe aiw4211lv10 mmc=1 gpio=52
+
+当前驱动支持传入mmc主控编号及用于中断检测的gpio编号,可以实现较为灵活的硬件配置,如果不传参则分别使用代码中规定的默认值1和52。
+
+驱动加载完成后,使用ifconfig -a指令可以看到已经生成了无线网卡wlan0。
+
+### 5.3 网络配置
+
+启动配置工具server端并置于后台运行:iotwifi_link &
+
+该工具的功能角色类似于wpa_supplicant。iotwifi_link首先会将wlan0 up起来,然后从WiFi设备侧同步mac地址及ip地址到host端。
+
+运行配置工具client端,控制WiFi接入AP及设置其他参数:iotwifi_cli --config /etc/wifi.conf
+
+运行配置工具client端,控制WiFi进入深睡模式:iotwifi_cli --dirsleep
+
+/etc/wifi.conf是WiFi工作参数配置文件,以json格式编写,基本上是对wifi_config_t结构体的映射,具体可参考6.1.2章节。
+
+## 6. API参考
+
+AiW4211LV10驱动加载后生成的无线网卡与一般WiFi网卡无异,因此网络通信功能无特殊API需要说明。
+
+除基本的网络通信外,K230与WiFi还存在两个消息通信接口,需要重点说明。
+
+### 6.1 config接口
+
+#### 6.1.1 API
+
+int kd_wifi_config([wifi_config_t](#6121-wifi_config_t) \*config)
+
+配置WiFi工作参数:
+
+- 配置目标AP的名称、密码、认证及加密方式
+- 配置WiFi休眠等级,苏醒周期以及可唤醒的gpio
+- 配置tcp keepalive时间参数等
+
+#### 6.1.2 数据结构
+
+##### 6.1.2.1 wifi_config_t
+
+```c
+typedef struct {
+unsigned int config_mask;
+#define CFG_MASK_SLEEP (1 << 0)
+#define CFG_MASK_CONNECT (1 << 1)
+#define CFG_MASK_KEEPALIVE (1 << 2)
+wifi_sleep_t sleep;
+wifi_connect_t conn;
+wifi_keepalive_t keepalive;
+} wifi_config_t;
+```
+
+表 6-1 wifi_config_t结构体成员
+
+| 成员 | 说明 |
+|---------------------------------|---------|
+| config_mask | 配置目标项掩码,使能或屏蔽目标项,例如全部配置则:config_mask = CFG_MASK_SLEEP\|CFG_MASK_CONNECT\|CFG_MASK_KEEPALIVE; CFG_MASK_SLEEP:配置休眠参数,CFG_MASK_CONNECT:配置AP连接参数,CFG_MASK_KEEPALIVE:配置tcp keepalive参数 |
+| [sleep](#6122-wifi_sleep_t) | 休眠参数 |
+| [conn](#6123-wifi_connect_t) | AP连接参数|
+| [keepalive](#6124-wifi_keepalive_t) | tcp keepalive参数|
+
+#### 6.1.2.2 wifi_sleep_t
+
+```c
+typedef struct
+{
+unsigned int level;
+#define WIFI_SLEEP_LIGHT 1
+#define WIFI_SLEEP_DEEP 2
+#define WIFI_SLEEP_ULTRA 3
+unsigned int period;
+union
+{
+/*
+* gpioX_wake: 0---disable, 1---enable
+*/
+struct {
+unsigned int gpio0_wake:1;
+unsigned int gpio1_wake:1;
+unsigned int gpio2_wake:1;
+unsigned int gpio3_wake:1;
+unsigned int gpio4_wake:1;
+unsigned int gpio5_wake:1;
+unsigned int gpio6_wake:1;
+unsigned int gpio7_wake:1;
+unsigned int gpio8_wake:1;
+unsigned int gpio9_wake:1;
+unsigned int gpio10_wake:1;
+unsigned int gpio11_wake:1;
+unsigned int gpio12_wake:1;
+unsigned int gpio13_wake:1;
+unsigned int gpio14_wake:1;
+};
+unsigned int wake_gpios;
+};
+} wifi_sleep_t;
+```
+
+表 6-2 wifi_sleep_t结构体成员
+
+| 成员 | 说明 |
+|-------------|-------|
+| level | 休眠等级 WIFI_SLEEP_LIGHT:浅睡 WIFI_SLEEP_DEEP:深睡,主要休眠模式 WIFI_SLEEP_ULTRA:超深睡,只有3/5/7/14号gpio可唤醒,目前不使用 |
+| period | 苏醒周期,有效数值33\~\~4000ms。WiFi周期性从休眠态醒来,检测AP是否有发给自己的数据缓存 |
+| wake_gpios | enable或disable可唤醒WiFi的gpio(WiFi侧gpio)|
+
+#### 6.1.2.3 wifi_connect_t
+
+```c
+typedef struct
+{
+char ssid[EXT_WIFI_MAX_SSID_LEN + 1];
+ext_wifi_auth_mode auth;
+char key[EXT_WIFI_MAX_KEY_LEN + 1];
+unsigned char bssid[EXT_WIFI_MAC_LEN];
+ext_wifi_pairwise pairwise;
+} wifi_connect_t;
+```
+
+表 6-3 wifi\_**connect**\_t结构体成元
+
+| ssid | AP名称 |
+|----------|--------|
+| auth | 认证类型 EXT_WIFI_SECURITY_OPEN EXT_WIFI_SECURITY_WEP EXT_WIFI_SECURITY_WPA2PSK EXT_WIFI_SECURITY_WPAPSK_WPA2PSK_MIX EXT_WIFI_SECURITY_WPAPSK EXT_WIFI_SECURITY_WPA EXT_WIFI_SECURITY_WPA2 EXT_WIFI_SECURITY_SAE EXT_WIFI_SECURITY_WPA3_WPA2_PSK_MIX EXT_WIFI_SECURITY_UNKNOWN |
+| Key | AP密码 |
+| bssid | AP bssid,一般为AP mac地址 |
+| pairwise | 加密类型 EXT_WIFI_PARIWISE_UNKNOWN EXT_WIFI_PAIRWISE_AES EXT_WIFI_PAIRWISE_TKIP EXT_WIFI_PAIRWISE_TKIP_AES_MIX |
+
+#### 6.1.2.4 wifi_keepalive_t
+
+```c
+typedef struct
+{
+unsigned char svrip[16];
+unsigned short svrport;
+unsigned short tcp_keepalive_time;
+unsigned short tcp_keepalive_intvl;
+unsigned short tcp_keepalive_probes;
+unsigned short heartbeat_intvl;
+unsigned short heartbeat_probes;
+} wifi_keepalive_t;
+```
+
+表 6-4 wifi_keepalive_t结构体成员
+
+| svrip | server端ip地址 |
+|----------------------|-------------------------------------------------------------------------|
+| svrport | server端端口号 |
+| tcp_keepalive_time | TCP层keepalive心跳包常规发送周期,秒 |
+| tcp_keepalive_intvl | TCP层keepalive心跳包无回应之后新的发送周期,秒 |
+| tcp_keepalive_probes | TCP层keepalive心跳包无回应计数超过该阈值之后,判断TCP连接异常,断开重连 |
+| heartbeat_intvl | 应用层心跳包发送周期,秒 |
+| heartbeat_probes | 应用层心跳包无回应计数超过该阈值之后,判断socket连接异常,断开重连 |
+
+### 6.2 sleep接口
+
+int kd_wifi_sleep(void)
+
+控制WiFi进入休眠,休眠相关参数在config API当中设置。
+
+## 7. 基本性能测试
+
+### 7.1 吞吐量测试
+
+在办公室环境使用iperf进行网络吞吐量测试,PC通过网线接入AP,K230 EVB通过AiW4211LV10接入同一AP,分别在两端启动iperf工具,交叉测试上行及下行吞吐量。
+
+client:iperf -c xxx.xxx.xxx.xxx -i 2 -t 300
+
+server:iperf -s -i 2
+
+dual:iperf -c xxx.xxx.xxx.xxx -i 2 -t 300 -d
+
+表 7-1 TCP吞吐量粗测数据
+
+| WiFi ROLE | Bandwidth(Mbits/sec) |
+|-----------|----------------------|
+| client | 12.2 |
+| server | 20.3 |
+
+client:iperf -c xxx.xxx.xxx.xxx -i 2 -t 300 -u -b 25M
+
+server:iperf -s -i 2 -u
+
+表 7-2 UDP吞吐量粗测数据
+
+| WiFi ROLE | Bandwidth(Mbits/sec) | Jitter(ms) | Lost/Total Datagrams |
+|-----------|----------------------|------------|----------------------|
+| client | 17.8 | 1.341 | 1571/455457 (0.34%) |
+| server | 21.0 | 1.064 | 1/534990 (0.00019%) |
+
+## 7.2 文件传输测试
+
+分别在PC与K230 EVB端架设nginx服务器,并分别使用wget拉取544MB大文件,并校验拉取文件的MD5值,测试150次无异常。
diff --git "a/zh/01_software/board/osdrv/K230_\345\244\247\346\240\270\344\275\216\351\200\237\351\251\261\345\212\250_API\345\217\202\350\200\203.md" "b/zh/01_software/board/osdrv/K230_\345\244\247\346\240\270\344\275\216\351\200\237\351\251\261\345\212\250_API\345\217\202\350\200\203.md"
new file mode 100755
index 0000000..75d69ef
--- /dev/null
+++ "b/zh/01_software/board/osdrv/K230_\345\244\247\346\240\270\344\275\216\351\200\237\351\251\261\345\212\250_API\345\217\202\350\200\203.md"
@@ -0,0 +1,2821 @@
+# K230大核低速驱动API参考
+
+
+
+版权所有©2023北京嘉楠捷思信息技术有限公司
+
+
+
+## 免责声明
+
+您购买的产品、服务或特性等应受北京嘉楠捷思信息技术有限公司(“本公司”,下同)及其关联公司的商业合同和条款的约束,本文档中描述的全部或部分产品、服务或特性可能不在您的购买或使用范围之内。除非合同另有约定,本公司不对本文档的任何陈述、信息、内容的正确性、可靠性、完整性、适销性、符合特定目的和不侵权提供任何明示或默示的声明或保证。除非另有约定,本文档仅作为使用指导参考。
+
+由于产品版本升级或其他原因,本文档内容将可能在未经任何通知的情况下,不定期进行更新或修改。
+
+## 商标声明
+
+、“嘉楠”和其他嘉楠商标均为北京嘉楠捷思信息技术有限公司及其关联公司的商标。本文档可能提及的其他所有商标或注册商标,由各自的所有人拥有。
+
+**版权所有 © 2023北京嘉楠捷思信息技术有限公司。保留一切权利。**
+非经本公司书面许可,任何单位和个人不得擅自摘抄、复制本文档内容的部分或全部,并不得以任何形式传播。
+
+
+
+## 目录
+
+[TOC]
+
+## 前言
+
+### 概述
+
+本文档主要介绍 K230 大核RT-Smart上驱动软件设计,设计内容主要包括 UART、I2C、GPIO、Hard-lock、ADC、WDT、OTP、TS、PWM、RTC、TIMER等驱动在用户态和内核态的使用。
+
+### 读者对象
+
+本文档(本指南)主要适用于以下人员:
+
+- 技术支持工程师
+- 软件开发工程师
+
+### 缩略词定义
+
+| 简称 | 说明 |
+|-----------|---------------------------------------------|
+| UART | Universal Asynchronous Receiver/Transmitter |
+| I2C | Inter-Integrated Circuit |
+| GPIO | General-purpose input/output |
+| Hard-lock | 硬件互斥锁 |
+| ADC | analog-to_digital converter |
+| WDT | watchdog |
+| OTP | One-Time Programmable |
+| TS | Temperature Sensor |
+
+### 修订记录
+
+| 文档版本号 | 修改说明 | 修改者 | 日期 |
+|------------|----------|------------|-------------------|
+| V1.0 | 初版 | 范俊涛 | 2023/4/26 |
+| V1.1 | 增加watchdog部分 | 范俊涛 | 2023/5/26 |
+| V1.2 | 增加OTP TS部分 | 范俊涛 | 2023/5/31 |
+| V1.3 | 增加pwm rtc timer部分 | 范俊涛 | 2023/6/29 |
+
+## 1 概述
+
+### 1.1 概述
+
+UART:
+
+通用异步收发器,该总线双向通信,可以实现全双工传输和接收。在嵌入式设计中,UART用来与PC进行通信,包括与监控调试器和其它器件,如EEPROM通信。
+
+I2C:
+
+由Philips公司(2006年迁移到NXP)在1980年代初开发的一种简单、双线双向的同步串行总线,它利用一根时钟线和一根数据线在连接总线的两个器件之间进行信息的传递,为设备之间数据交换提供了一种简单高效的方法。每个连接到总线上的器件都有唯一的地址,任何器件既可以作为主机也可以作为从机,但同一时刻只允许有一个主机。
+
+GPIO:
+
+(general porpose intput output)通用输入输出端口的简称。可以通过软件控制其输出和输入,通俗来说就是常用引脚,可以控制引脚的高低电平,对其进行读取或者写入。
+
+Hard-lock:
+
+嘉楠自研模块,用于同核不通进程间或异核之间对共享资源的互斥而实现的硬件互斥锁,可用于对共享资源的互斥使用。
+
+ADC:
+
+ADC 即模拟数字转换器(Analog-to-digital converter),是指将连续变化的模拟信号转换为离散的数字信号的器件。真实世界的模拟信号,例如温度、压力、声音或者图像等,需要转换成更容易储存、处理和发射的数字形式。模数转换器可以实现这个功能,在各种不同的产品中都可以找到它的身影。
+
+WDT:
+WDT 是watchdog的简称,本质上是一个定时器,软件程序需要每隔一段时间喂一次狗,如果WDT超时则可以产生一个中断信号或复位信号到CPU,由此通过软硬件结合的方式防止程序运行异常而不复位。
+
+OTP:
+OTP 主要用于存储安全敏感的机密信息,例如 bootrom 的固件信息、加解密密钥、签名信息以及用户自己定义的安全信息等。OTP 集成在安全模块 PUF 中,为整个 SoC 提供安全存储功能,保护根密钥和启动代码等关键数据不被攻击者破坏。大核侧 OTP 驱动主要提供读、写两种功能,可读区域为包括生产信息在内的 24Kbits 空间;写区域为 OTP 的最后 512 bytes 空间。
+
+TS:
+K230 TS(Temperature Sensor),自研温度传感器,采用 TSMC 12nm 工艺。TS 的应用场景是降频。大核侧 TS 驱动主要提供读功能,在读 TS 之前,首先需要配置 TS 寄存器使能信号、输出模式,然后才能读出芯片的结温。另外,TS 寄存器每 2.6s 读取一次芯片结温。
+
+PWM:是一种对模拟信号电平进行数字编码的方法,通过不同频率的脉冲使用方波的占空比用来对一个具体模拟信号的电平进行编码,使输出端得到一系列幅值相等的脉冲,用这些脉冲来代替所需要波形的设备。
+
+RTC:实时时钟可以提供精确的实时时间,它可以用于产生年、月、日、时、分、秒、星期等信息。
+
+TIMER(HWTIMER):通过内部计数器模块对内外部脉冲信号进行计数,可以工作在定时器模式和计数器模式。
+
+### 1.2 功能描述
+
+UART驱动结构如下图:
+
+
+
+I2C驱动结构如下图:
+
+
+
+GPIO驱动结构如下图:
+
+
+
+Hard-lock驱动结构如下图:
+
+
+
+adc 驱动结构如下图:
+
+
+
+将 adc 硬件抽象为一个设备,设备包含六个通道。支持采样电压范围为 0V\~1.8V,浮动范围为 5mv。
+
+WDT 驱动结构如下图:
+
+
+
+OTP 驱动结构如下图:
+
+
+
+TS 驱动结构如下图所示:
+
+
+
+PWM 驱动结构如下图所示:
+
+
+
+RTC 驱动结构如下图所示:
+
+
+
+TIMER 驱动结构如下图所示:
+
+
+
+### 1.3 驱动API使用方法
+
+#### 1.3.1 UART
+
+##### 内核态程序使用uart
+
+1. 通过设备节点找到设备句柄。
+
+`uart_dev = rt_device_find(“uart”)`
+
+1. 以中断接收及轮询发送模式打开串口设备
+
+`rt_device_open(uart_dev, RT_DEVICE_FLAG_INT_RX)`
+
+1. 设置接收回调函数
+
+`rt_device_set_rx_indicate(uart_dev,call_back)`
+
+1. 发送字符串
+
+`rt_device_write(uart_dev, 0, str, (sizeof(str) - 1))`
+
+#### 1.3.2 I2C
+
+##### 内核态程序使用i2c
+
+1. 通过总线名找到总线句柄
+
+`i2c_bus = rt_i2c_bus_device_find(I2C_NAME)`
+
+1. 构建message
+
+```text
+struct rt_i2c_msg msgs
+msgs.addr = CHIP_ADDRESS;
+msgs.flags = RT_I2C_WR;
+msgs.buf = buf;
+msgs.len = 2;
+```
+
+1. 传输
+
+`rt_i2c_transfer(bus, &msgs, 1)`
+
+#### 1.3.3 GPIO
+
+##### 内核态程序使用gpio
+
+1. 包含头文件
+
+`#include "drv_gpio.h"`
+
+1. 设置关键输入输出模式
+
+`kd_pin_mode(LED_PIN_NUM1, GPIO_DM_OUTPUT)`
+`kd_pin_mode(KEY1_PIN_NUM, GPIO_DM_INPUT)`
+
+1. 设置高低电平
+
+`kd_pin_write(LED_PIN_NUM1, GPIO_PV_LOW)`
+`kd_pin_write(LED_PIN_NUM1, GPIO_PV_HIGH)`
+
+1. 读取电平
+
+`kd_pin_read(KEY1_PIN_NUM)`
+
+1. 设置中断方式,绑定中断函数
+
+`kd_pin_attach_irq(KEY1_PIN_NUM,GPIO_PE_FALLING, key_irq, RT_NULL)`
+
+1. 中断使能
+
+`kd_pin_irq_enable(KEY1_PIN_NUM, KD_GPIO_IRQ_ENABLE)`
+
+##### 用户态程序使用gpio(仅读写)
+
+1. 打开设备
+
+`gpio_fd = open("/dev/gpio", O_RDWR)`
+
+1. 配置输入输出模式
+
+`ioctl(fd, GPIO_DM_OUTPUT, &mode33)`
+
+1. 输出高低电平
+
+`ioctl(fd, GPIO_WRITE_HIGH, &mode33)`
+
+1. 读取电平
+
+`ioctl(fd, GPIO_READ_VALUE, &mode27)`
+
+#### 1.3.4 Hard-lock
+
+##### 内核态使用hard-lock
+
+1. 包含头文件
+
+`#include "drv_hardlock.h"`
+
+1. 申请使用锁
+
+`kd_request_lock(rt_uint32_t num)`
+
+1. 释放锁
+
+`kd_hardlock_unlock(rt_uint32_t num)`
+
+#### 1.3.5 ADC
+
+##### 1.3.5.1 用户态 msh 使用 adc
+
+用户通过 msh 来获取 adc 采样值的步骤如下:
+
+1. 在使用设备前,需要先查找设备是否存在,可以使用命令 adc probe 后面跟注册的 ADC 设备的名称。如下所示;
+
+`msh />adc probe adc`
+`probe adc success`
+
+1. 使能设备的某个通道可以使用命令 adc enable 后面跟通道号;
+
+`msh />adc enable 0`
+`adc channel 0 enables success`
+
+1. 读取 ADC 设备某个通道的数据可以使用命令 adc read 后面跟通道号;
+
+`msh />adc read 0`
+`adc channel 0 read value is 0x00000796`
+
+1. 关闭设备的某个通道可以使用命令 adc enable 后面跟通道号;
+
+`msh />adc disable 0`
+`adc channel 0 disable success`
+
+##### 1.3.5.2 用户态程序使用 adc
+
+用户态程序中获取 adc 采样值的步骤如下:
+
+1. rt_device_find 查找 adc 设备。如下所示:
+
+`rt_device_t adc_dev;`
+`adc_dev = rt_device_find("adc");`
+
+1. 通过设备句柄打开 adc 设备。如下所示:
+
+`ret = rt_device_open(adc_dev, RT_DEVICE_OFLAG_RDWR);`
+
+1. 通过设备句柄使能 adc 设备的某个通道。如下所示:
+
+```text
+uint32_t *p;
+uint32_t channel = 0;
+p = (uint32_t *)(intptr_t)channel;
+ret = rt_device_control(adc_dev, 0, (void *)p);
+```
+
+1. 通过设备句柄从 adc 读取数据。如下所示:
+
+```text
+uint32_t channel = 0;
+uint32_t reg_value;
+rt_device_read(adc_dev, channel, (void *)®_value, sizeof(unsigned int));
+```
+
+1. 当不再使用 adc 的某个通道时,通过设备句柄失能 adc 设备的某个通道;
+
+```text
+uint32_t *p;
+uint32_t channel = 0;
+p = (uint32_t *)(intptr_t)channel;
+ret = rt_device_control(adc_dev, 0, (void *)p);
+```
+
+##### 1.3.5.3 内核态程序使用 adc
+
+1. 查找 adc 设备
+
+应用程序根据 adc 设备名称获取设备句柄,进而可以操作 adc 设备,查找设备函数如下所示:
+
+`rt_device_t rt_device_find(const char* name);`
+
+1. 使能 adc 通道
+
+`rt_err_t rt_adc_enable(rt_adc_device_t dev, rt_uint32_t channel);`
+
+1. 读取 adc 通道采样值
+
+`rt_uint32_t rt_adc_read(rt_adc_device_t dev, rt_uint32_t channel);`
+
+1. 关闭 adc 通道
+
+`rt_err_t rt_adc_disable(rt_adc_device_t dev, rt_uint32_t channel);`
+
+#### 1.3.6 WDT
+
+##### 1.3.6.1 用户态程序使用WDT
+
+1. 打开设备节点
+
+`open(WDT_DEVICE_NAME, O_RDWR);`
+
+1. 设置超时时间
+
+`ioctl(wdt_fd, CTRL_WDT_SET_TIMEOUT, &timeout);`
+
+1. 启动看门狗计时
+
+`ioctl(wdt_fd, CTRL_WDT_START, NULL);`
+
+1. 喂狗
+
+`ioctl(wdt_fd, CTRL_WDT_KEEPALIVE, NULL)`
+
+##### 1.3.6.2 内核态程序使用WDT
+
+1. 获取设备句柄
+
+`wdt_dev = rt_device_find(WDT_DEVICE_NAME);`
+
+1. 初始化设备
+
+`rt_device_init(wdt_dev);`
+
+1. 设置超时时间
+
+`rt_device_control(wdt_dev, KD_DEVICE_CTRL_WDT_SET_TIMEOUT, &timeout);`
+
+1. 启动看门狗计时
+
+`rt_device_control(wdt_dev, KD_DEVICE_CTRL_WDT_START, RT_NULL);`
+
+1. 喂狗
+
+`rt_device_control(wdt_dev, KD_DEVICE_CTRL_WDT_KEEPALIVE, RT_NULL);`
+
+#### 1.3.7 OTP
+
+大核侧 OTP 驱动可以支持被内核态其它驱动调用、用户态应用程序调用等场景,下面,将分别介绍这两种应用场景下 OTP 驱动的使用方法、注意事项。
+
+##### 1.3.7.1 用户态程序使用 OTP
+
+在 rt-smart 中,应用程序通过 I/O 设备管理接口来访问硬件设备,当实现对应的设备驱动之后,应用程序就可以访问该硬件。Rt-smart 用户层通过操作 `/dev/otp` 来访问 OTP 硬件,用户态应用程序使用 OTP 时,可以通过 open、read、write 等操作来访问 otp 设备。用户态应用程序使用 OTP 的具体操作如下:
+
+1. 添加头文件 `rtdevice.h`;
+1. 应用程序根据设备名称获取设备句柄;
+1. 获得设备句柄之后,应用程序可以打开设备;
+1. 初始化参数,包括偏移量、缓冲区、大小;
+1. 通过设备句柄和参数值从 OTP 设备中读取/写入数据;
+1. 利用设备句柄关闭设备。
+
+其中,snippet 代码如下所示:
+
+```c
+#include
+#include
+
+// 查找设备,获取句柄
+otp_dev = rt_device_find(“otp”);
+
+// 打开设备
+ret = rt_device_open(otp_dev, RT_DEVICE_OFLAG_RDWR);
+
+// 初始化读参数并从OTP空间读值,参数分别代表读取OTP的偏移量、要读取的字节长度、缓冲区
+uint32_t pos = 0x0;
+uint32_t size = 0xC00;
+uint32_t buffer[768] = {0};
+ret = rt_device_read(otp_dev, pos, (void *)buffer, size);
+
+
+// 初始化写参数并写入OTP空间,参数分别代表写入OTP的偏移量、写入的字节长度、要写入的值
+pos = 0x0;
+size = 0x4;
+buffer[0] = 0xff11ff11;
+ret = rt_device_write(otp_dev, pos, (void *)buffer, size);
+
+// 关闭设备
+rt_device_close(otp_dev);
+
+```
+
+##### 1.3.7.2 内核态程序使用 OTP
+
+在rt-smart中,内核态其它驱动程序想要读写 OTP 空间时,只需要调用 OTP 驱动提供的接口即可。具体的步骤如下所示:
+
+1. 添加头文件 `drv_otp.h`;
+1. 根据设备名称获取设备句柄;
+1. 初始化参数,包括偏移量、缓冲区、大小;
+1. 通过设备句柄和参数值从 OTP 设备中读取/写入数据;
+ - otp_device_read
+ - otp_device_write
+
+其中,snippet 代码如下所示:
+
+```c
+#include drv_otp.h
+
+// 获取句柄
+otp_dev = rt_device_find(“otp”);
+
+// 从(otp_read_base + 0x0)地址处读取0xC00字节的数据
+uint32_t pos = 0x0;
+uint32_t size = 0xC00;
+uint32_t buffer[768] = {0};
+ret = otp_device_read(otp_dev, pos, (void *)buf, size);
+
+// 向(otp_write_base + 0x0)地址处写 0xff11ff11
+pos = 0x0;
+size = 0x4;
+buffer[0] = 0xff11ff11;
+ret = otp_device_write(otp_dev, pos, (void *)buffer, size);
+
+```
+
+##### 1.3.7.3 注意事项
+
+在使用读写 API 的时候,需要注意以下几个关键点:
+
+- 危险操作:OTP 空间为一次可编程的区域,bit 位一旦由0写为1,便不能恢复;
+- 读写偏移量:读操作和写操作的基地址是不同的,OTP 区域的可读空间范围为`(otp_read_base + 0x0)~(otp_read_base + 0xc00)`,可写空间的长度为`(otp_write_base + 0x0)~(otp_write_base + 0x200)`;
+- 读写size:size 是4的倍数。
+
+#### 1.3.8 TS
+
+大核侧 TS 驱动可以支持被内核态其它驱动调用、用户态应用程序调用等场景,下面,将分别介绍这两种应用场景下 TS 驱动的使用方法、注意事项。
+
+##### 1.3.8.1 用户态程序使用 TS
+
+在 rt-smart 中,应用程序通过 I/O 设备管理接口来访问硬件设备,当实现对应的设备驱动之后,应用程序就可以访问该硬件。Rt-smart 用户层通过操作 `/dev/ts` 来访问 TS 硬件,用户态应用程序使用 TS 时,可以通过 `open`、`read`、`close` 等操作来访问 ts 设备。用户态应用程序使用 TS 的具体操作如下:
+
+1. 添加头文件 `rtdevice.h`;
+1. 应用程序根据设备名称获取设备句柄;
+1. 获得设备句柄之后,应用程序可以打开设备;
+1. 初始化参数,包括偏移量、缓冲区、大小;
+1. 通过设备句柄和参数值从 TS 设备中读取数据;
+1. 利用设备句柄关闭设备。
+
+其中,snippet 代码如下所示:
+
+```c
+#include
+#include
+
+// 查找设备,获取句柄
+ts_dev = rt_device_find(“ts”);
+
+// 打开设备
+ret = rt_device_open(ts_dev, RT_DEVICE_OFLAG_RDWR);
+
+// 初始化读参数并从TS设备中读值,参数分别代表读取TS的偏移量、要读取的字节长度、缓冲区
+uint32_t pos = 0x0;
+uint32_t size = 0x0;
+uint32_t buffer[1] = {0};
+ret = rt_device_read (ts_dev, pos, (void *)buffer, size);
+
+ts_val = *(uint32_t *)buffer;
+code = (double)(ts_val & 0xfff);
+
+usleep(2600000);
+
+if(ts_val >> 12)
+{
+ temp = (1e-10 * pow(code, 4) * 1.01472 - 1e-6 * pow(code, 3) * 1.10063 + 4.36150 * 1e-3 * pow(code, 2) - 7.10128 * code + 3565.87);
+
+ printf("ts_val: 0x%x, TS = %lf C\n", ts_val, temp);
+}
+
+// 关闭设备
+rt_device_close(ts_dev);
+
+```
+
+##### 1.3.8.2 内核态程序使用 TS
+
+在rt-smart中,内核态其它驱动程序想要读芯片结温时,只需要调用 TS 驱动提供的接口即可。具体的步骤如下所示:
+
+1. 添加头文件 `drv_ts.h`;
+1. 根据设备名称获取设备句柄;
+1. 初始化参数,包括偏移量、缓冲区、大小;
+1. 通过设备句柄和参数值从 TS 设备中读取温度数据;
+ - ts_device_read
+
+其中,snippet 代码如下所示:
+
+```c
+#include drv_ts.h
+
+// 查找设备,获取句柄
+ts_dev = rt_device_find(“ts”);
+
+// 初始化读参数并从TS设备中读值,参数分别代表读取TS的偏移量、要读取的字节长度、缓冲区
+uint32_t pos = 0x0;
+uint32_t size = 0x0;
+uint32_t buffer[1] = {0};
+ret = ts_device_read (ts_dev, pos, (void *)buffer, size);
+
+```
+
+##### 1.3.8.3 注意事项
+
+在调用API读TS温度的时候,需要注意以下几个关键点:
+
+- TS 驱动会读取 tsensor 寄存器,将寄存器的值返回,但是寄存器的值并不是真正的温度值,需要用数学公式做相应的转换,详细的公式信息如下:
+
+```c
+// code为读取TS寄存器的值保留12位得到的结果,temp为芯片结温
+code = ts_val & 0xfff;
+temp = (1e-10 * pow(code, 4) * 1.01472 - 1e-6 * pow(code, 3) * 1.10063 + 4.36150 * 1e-3 * pow(code, 2) - 7.10128 * code + 3565.87);
+
+```
+
+#### 1.3.9 PWM
+
+目前PWM驱动仅提供了从内核态的调用方法,使用方法如下:
+
+##### 1.3.9.1 内核态程序使用PWM
+
+```c
+pwm_demo:
+ pwm_dev = (struct rt_device_pwm *)rt_device_find(PWM_DEV_NAME);
+ /* 设置PWM周期和脉冲宽度 */
+ period = 100000; /* PWM周期, 单位为纳秒ns */
+ pulse = 50000; /* PWM正脉冲宽度值, 单位为纳秒ns */
+ rt_pwm_set(pwm_dev, PWM_DEV_CHANNEL_2, period, pulse);
+ period = 100000;
+ pulse = 25000;
+ rt_pwm_set(pwm_dev, PWM_DEV_CHANNEL_3, period, pulse);
+ period = 100000;
+ pulse = 75000;
+ rt_pwm_set(pwm_dev, PWM_DEV_CHANNEL_4, period, pulse);
+ /* 使能设备,同一路pwm的不同channel仅需任意channel使能一次 */
+ rt_pwm_enable(pwm_dev, PWM_DEV_CHANNEL_2);
+ rt_pwm_enable(pwm_dev, PWM_DEV_CHANNEL_4);
+ sleep(10);
+ /* disable 时同理 */
+ rt_pwm_disable(pwm_dev, PWM_DEV_CHANNEL_2);
+ rt_pwm_disable(pwm_dev, PWM_DEV_CHANNEL_4);
+```
+
+##### 1.3.9.2 FinSH命令使用PWM
+
+```shell
+设置 PWM 设备的某个通道的周期和占空比
+msh />pwm_set pwm1 1 500000 5000
+
+使能 PWM 设备的某个通道
+msh />pwm_enable pwm1 1
+
+关闭 PWM 设备的某个通道
+msh />pwm_disable pwm1 1
+```
+
+##### 1.3.9.3 注意事项
+
+K230共有6个PWM通道,其中channel 0 ~ 2(pwm 0 ~ 2)同属一路PWM,channel 3 ~ 5(pwm 3 ~ 5)通属一路PWM,在同时使用多通道PWM时,同属一路的PWM,仅需任意使能其中一个channel即可。
+如 [1.3.9.1](#1391-内核态程序使用pwm) 中的示例,channel3和channel4仅使能了channel4,此时channel3也被使能。
+
+#### 1.3.10 RTC
+
+##### 1.3.10.1 内核态使用RTC
+
+RTC驱动提供了内核态的调用方法,使用方法如下:
+
+```c
+time_t now;
+rt_device_t device = RT_NULL;
+
+device = rt_device_find(RTC_NAME);
+rt_device_open(device, 0);
+set_date(2024, 1, 1); //设置日期
+set_time(12, 30, 0); //设置时间
+
+while(1)
+{
+ now = time(RT_NULL); //获取当前时间
+ rt_kprintf("%s\n", ctime(&now)); //打印
+ rt_thread_mdelay(1000);
+}
+```
+
+如果要使用K230 RTC的中断功能,请参考以下示例:
+
+```c
+void user_alarm_callback(void)
+{
+ rt_kprintf("[ user alarm callback function. ]\n");
+}
+
+void alarm_rtc()
+{
+ time_t now;
+ uint32_t i;
+ struct tm p_tm;
+ rt_device_t dev = RT_NULL;
+ struct rt_alarm * alarm = RT_NULL;
+ struct kd_alarm_setup setup;
+
+ dev = rt_device_find(RTC_NAME);
+ rt_device_open(dev, 0);
+ set_date(2024, 1, 1);
+ set_time(1, 1, 0);
+
+ now = time(RT_NULL);
+ gmtime_r(&now,&p_tm);
+ setup.flag = RTC_INT_TICK_SECOND; //秒级tick中断,每秒钟都会触发,请参考宏定义
+ setup.tm.tm_year = p_tm.tm_year;
+ setup.tm.tm_mon = p_tm.tm_mon;
+ setup.tm.tm_mday = p_tm.tm_mday;
+ setup.tm.tm_wday = p_tm.tm_wday;
+ setup.tm.tm_hour = p_tm.tm_hour;
+ setup.tm.tm_min = p_tm.tm_min;
+ setup.tm.tm_sec = p_tm.tm_sec;
+
+ rt_device_control(dev, RT_DEVICE_CTRL_RTC_SET_CALLBACK, &user_alarm_callback); //set rtc interrupt callback
+
+ rt_device_control(dev, RT_DEVICE_CTRL_RTC_SET_ALARM, &setup); //set alarm time
+
+ for (i=0; i<5; i++)
+ {
+ now = time(RT_NULL);
+ rt_kprintf("%s\n", ctime(&now));
+ rt_thread_mdelay(1000);
+ }
+ rt_device_control(dev, RT_DEVICE_CTRL_RTC_STOP_ALARM, RT_NULL); //close interrupt
+ rt_device_close(dev);
+}
+```
+
+##### 1.3.10.2 注意事项
+
+使用K230的RTC模块时,必须在芯片上电时激活PMU(请参考PMU相关文档),否则RTC无法工作。
+
+以 《K230-USIP-EVB-LP3-V1.1》为例,需要将J1区域的排针io13 io14连接后上电。
+
+K230的RTC支持两种中断模式:
+
+```text
+1、alarm中断(定时中断),在定时时间到时只产生一次中断。最大精度:秒
+
+2、tick中断(周期中断),如每秒钟,每分钟,每小时,每天等都会产生中断。最大精度:1/64秒
+```
+
+#### 1.3.11 TIMER
+
+##### 1.3.11.1 内核态使用TIMER
+
+TIMER驱动提供了内核态的调用方法,使用方法如下:
+
+```c
+static rt_err_t tmr_timeout_cb(rt_device_t dev, rt_size_t size)
+{
+ rt_kprintf("hwtimer timeout callback fucntion @tick\n");
+ return RT_EOK;
+}
+
+/* 以下示例代码略去了函数调用的错误检查,仅供参考。*/
+void test_hwtimer(void)
+{
+ rt_hwtimerval_t timerval;
+ rt_hwtimer_mode_t mode;
+ rt_size_t tsize;
+ rt_uint32_t freq = 25000000; /* 计数频率 可选 12.5M 25M 50M 100M*/
+
+ tmr_dev_0 = rt_device_find("hwtimer0");
+ tmr_dev_1 = rt_device_find("hwtimer1");
+
+ rt_device_open(tmr_dev_0, RT_DEVICE_OFLAG_RDWR);
+ rt_device_open(tmr_dev_1, RT_DEVICE_OFLAG_RDWR);
+
+ /* 将 freq 所表示的计数频率向timer设置 */
+ rt_device_control(tmr_dev_0, HWTIMER_CTRL_FREQ_SET, &freq)
+ /* freq 不设置则驱动使用默认的计数频率 */
+
+
+ /* 绑定中断回调函数 */
+ rt_device_set_rx_indicate(tmr_dev_0, tmr_timeout_cb);
+ rt_device_set_rx_indicate(tmr_dev_1, tmr_timeout_cb);
+
+ timerval.sec = 10;
+ timerval.usec = 0;
+ tsize = sizeof(timerval);
+ mode = HWTIMER_MODE_ONESHOT;
+
+ rt_device_control(tmr_dev_0, HWTIMER_CTRL_MODE_SET, &mode);
+
+ /* 将计数时间向timer设置 */
+ rt_device_write(tmr_dev_0, 0, &timerval, tsize);
+
+ timerval.sec = 5;
+ timerval.usec = 0;
+ tsize = sizeof(timerval);
+ mode = HWTIMER_MODE_ONESHOT;
+
+ rt_device_control(tmr_dev_1, HWTIMER_CTRL_MODE_SET, &mode);
+ rt_device_write(tmr_dev_1, 0, &timerval, tsize);
+
+ while(1)
+ {
+ /* 获取当前计数值 */
+ rt_device_read(tmr_dev_0, 0, &timerval, sizeof(timerval));
+ rt_kprintf("Read timer0: Sec = %d, Usec = %d\n", timerval.sec, timerval.usec);
+
+ rt_device_read(tmr_dev_1, 0, &timerval, sizeof(timerval));
+ rt_kprintf("Read timer1: Sec = %d, Usec = %d\n", timerval.sec, timerval.usec);
+
+ rt_thread_mdelay(1000);
+ }
+
+}
+```
+
+##### 1.3.11.2 注意事项
+
+设置freq计数频率时,只有12.5M 25M 50M 100M可供选择,不可设置其他数值,freq越大计数精度越高。
+
+## 2. API 参考
+
+### 2.1 内核态 API
+
+#### 2.1.1 UART
+
+UART模块提供以下API:
+
+- [rt_serial_init](#2111-rt_serial_init)
+- [rt_serial_open](#2112-rt_serial_open)
+- [rt_serial_close](#2113-rt_serial_close)
+- [rt_serial_read](#2114-rt_serial_read)
+- [rt_serial_write](#2115-rt_serial_write)
+- [rt_serial_control](#2116-rt_serial_control)
+
+##### 2.1.1.1 rt_serial_init
+
+【描述】
+
+初始化一个串口设备。
+
+【语法】
+
+`rt_serial_init(struct rt_device *dev)`
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|----------|-----------|
+| dev | 设备句柄 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|------|
+| RT_EOK | 成功 |
+| 其他 | 失败 |
+
+##### 2.1.1.2 rt_serial_open
+
+【描述】
+
+打开一个串口设备。
+
+【语法】
+
+`rt_serial_open(struct rt_device *dev, rt_uint16_t oflag)`
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|-----------------------------------------------------------------------------------------|-----------|
+| dev | 设备句柄 | 输入 |
+| oflag | `RT_DEVICE_FLAG_INT_RX RT_DEVICE_FLAG_DMA_RX` `RT_DEVICE_FLAG_INT_TX` `RT_DEVICE_FLAG_DMA_TX` | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|---------|------|
+| RT_EOK | 成功 |
+| -RT_EIO | 失败 |
+
+##### 2.1.1.3 rt_serial_close
+
+【描述】
+
+关闭一个串口设备。
+
+【语法】
+
+`rt_serial_close(struct rt_device *dev)`
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|----------|-----------|
+| dev | 设备句柄 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|------|
+| RT_EOK | 成功 |
+| 其他 | 失败 |
+
+##### 2.1.1.4 rt_serial_read
+
+【描述】
+
+读取串口数据。
+
+【语法】
+
+`rt_serial_read(struct rt_device *dev, rt_off_t pos, void *buffer, rt_size_t size)`
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|--------------------|-----------|
+| dev | 设备句柄 | 输入 |
+| pos | 偏移,设0即可 | 输入 |
+| buffer | 用于装载数据的指针 | 输入 |
+| size | 要读取的大小 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|-----------|----------------|
+| rt_size_t | 读取到的字节数 |
+
+##### 2.1.1.5 rt_serial_write
+
+【描述】
+
+发送串口数据。
+
+【语法】
+
+`rt_serial_write(struct rt_device *dev, rt_off_t pos, void *buffer, rt_size_t size)`
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|--------------------|-----------|
+| dev | 设备句柄 | 输入 |
+| pos | 偏移,设0即可 | 输入 |
+| buffer | 将要写入数据的指针 | 输入 |
+| size | 要写入的大小 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|-----------|--------------|
+| rt_size_t | 写入的字节数 |
+
+##### 2.1.1.6 rt_serial_control
+
+【描述】
+
+通过控制接口,应用程序可以对串口设备进行配置,如波特率、数据位、校验位、接收缓冲区大小、停止位等参数的修改。
+
+【语法】
+
+`rt_serial_control(struct rt_device *dev, int cmd, void *args)`
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|------------------------------------------------|-----------|
+| dev | 设备句柄 | 输入 |
+| cmd | 命令控制字,可取值:`RT_DEVICE_CTRL_CONFIG` | 输入 |
+| args | 控制的参数,可取类型: `struct serial_configure` | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|------------|--------------------|
+| RT_EOK | 函数执行成功 |
+| -RT_ENOSYS | 执行失败,dev 为空 |
+| 其他 | 执行失败 |
+
+【芯片差异】
+
+无。
+
+【需求】
+
+头文件:`rtdevice.h`、`rtthread.h`
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+#### 2.1.2 I2C
+
+I2C模块提供以下API:
+
+- [rt_i2c_bus_device_find](#2121-rt_i2c_bus_device_find)
+- [rt_i2c_master_send](#2122-rt_i2c_master_send)
+- [rt_i2c_master_recv](#2123-rt_i2c_master_recv)
+- [rt_i2c_transfer](#2124-rt_i2c_transfer)
+
+##### 2.1.2.1 rt_i2c_bus_device_find
+
+【描述】
+
+查找i2c总线。
+
+【语法】
+
+`rt_i2c_bus_device_find(const char *bus_name)`
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|-------------|-----------|
+| bus_name | I2C总线名字 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|---------|----------------------------|
+| rt_i2c_bus_device* | 函数执行成功,返回总线句柄 |
+| RT_NULL | 总线不存在 |
+
+##### 2.1.2.2 rt_i2c_master_send
+
+【描述】
+
+向 I2C 从设备发送数据。
+
+【语法】
+
+```text
+rt_i2c_master_send(struct rt_i2c_bus_device *bus,
+rt_uint16_t addr,
+rt_uint16_t flags,
+const rt_uint8_t *buf,
+rt_uint32_t count);
+```
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|-----------------------------------------------------------------------|-----------|
+| bus | I2c总线句柄 | 输入 |
+| addr | I2C 从设备地址 | 输入 |
+| flags | 标志位,可为`RT_I2C_WR RT_I2C_RD`及之外的其他标志位,可以进行 `|` 操作 | 输入 |
+| buf | 待发送数据数据缓冲区 | 输入 |
+| count | 待发送数据大小(单位:字节) | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|--------------------------------------|
+| 正值 | 成功,返回发送的字节数 |
+| 负值 | 失败 |
+
+##### 2.1.2.3 rt_i2c_master_recv
+
+【描述】
+
+向 I2C 从设备发送数据。
+
+【语法】
+
+```text
+rt_i2c_master_recv(struct rt_i2c_bus_device *bus,
+rt_uint16_t addr,
+rt_uint16_t flags,
+rt_uint8_t *buf,
+rt_uint32_t count)
+```
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|-----------------------------------------------------------------------|-----------|
+| bus | I2c总线句柄 | 输入 |
+| addr | I2C 从设备地址 | 输入 |
+| flags | 标志位,可为`RT_I2C_WR` `RT_I2C_RD`及之外的其他标志位,可以进行 `|` 操作 | 输入 |
+| buf | 接收数据数据缓冲区 | 输入 |
+| count | 接收数据大小(单位:字节) | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|---------------------|
+| 正值 | 成功,返回接收到的字节数 |
+| 负值 | 失败 |
+
+##### 2.1.2.4 rt_i2c_transfer
+
+【描述】
+
+向 I2C 从设备发送数据。
+
+【语法】
+
+```text
+rt_i2c_transfer(struct rt_i2c_bus_device *bus,
+struct rt_i2c_msg msgs[],
+rt_uint32_t num)
+```
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|----------------------|-----------|
+| bus | I2c总线句柄 | 输入 |
+| msg | 待传输的消息数组指针 | 输入 |
+| num | 消息数组的元素个数 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|--------------------------------------|
+| 0 | 失败,总线不支持的操作 |
+| 正值 | 成功,返回传输msg的数量 |
+| -RT_EIO | 传输失败 |
+
+【芯片差异】
+
+无。
+
+【需求】
+
+头文件:`drivers/i2c.h`
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+#### 2.1.3 GPIO
+
+GPIO模块提供以下API:
+
+- [kd_pin_mode](#2131-kd_pin_mode)
+- [kd_pin_write](#2132-kd_pin_write)
+- [kd_pin_read](#2133-kd_pin_read)
+- [kd_pin_attach_irq](#2134-kd_pin_attach_irq)
+- [kd_pin_detach_irq](#2135-kd_pin_detach_irq)
+- [kd_pin_irq_enable](#2136-kd_pin_irq_enable)
+- [gpio_device_ioctl](#2137-gpio_device_ioctl)
+
+##### 2.1.3.1 kd_pin_mode
+
+【描述】
+
+设置gpio管脚输入输出模式。
+
+【语法】
+
+`kd_pin_mode(rt_base_t pin, rt_base_t mode)`
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|-------------------------------------------------------------------------------------|-----------|
+| pin | gpio编号 | 输入 |
+| mode | 模式。`GPIO_DM_INPUT`、`GPIO_DM_INPUT_PULL_DOWN`、`GPIO_DM_INPUT_PULL_UP`、`GPIO_DM_OUTPUT` | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|------|
+| RT_EOK | 成功 |
+| 其他 | 失败 |
+
+##### 2.1.3.2 kd_pin_write
+
+【描述】
+
+设置gpio管脚电平。
+
+【语法】
+
+`kd_pin_write(rt_base_t pin, rt_base_t value)`
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|-------------------------------------|-----------|
+| pin | gpio编号 | 输入 |
+| value | 电平状态。`GPIO_PV_LOW`、`GPIO_PV_HIGH` | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|----------|------|
+| 无返回值 | |
+
+##### 2.1.3.3 kd_pin_read
+
+【描述】
+
+设置gpio管脚电平。
+
+【语法】
+
+`kd_pin_read(rt_base_t pin)`
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|----------|-----------|
+| pin | gpio编号 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|------------------------|
+| 0 | 管脚当前状态低电平 |
+| 1 | 管脚当前电平状态高电平 |
+
+##### 2.1.3.4 kd_pin_attach_irq
+
+【描述】
+
+绑定管脚中断函数以及设置中断方式。
+
+【语法】
+
+`kd_pin_attach_irq(rt_int32_t pin,rt_uint32_t mode, void (*hdr)(void *args), void *args)`
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|-----------------------------------------------------------------------------------------|-----------|
+| pin | gpio编号 | 输入 |
+| mode | 中断方式。 `GPIO_PE_RISING`、 `GPIO_PE_FALLING`、 `GPIO_PE_BOTH`、 `GPIO_PE_HIGH`、 `GPIO_PE_LOW` | 输入 |
+| hdr | 中断回调函数,由用户设置 | 输入 |
+| args | 中断回调函数的参数,可以为RT_NULL | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|----------|
+| RT_EOK | 绑定成功 |
+| 错误码 | 绑定失败 |
+
+##### 2.1.3.5 kd_pin_detach_irq
+
+【描述】
+
+解除管脚中断函数的绑定,并禁止gpio管脚的中断使能。
+
+【语法】
+
+`kd_pin_detach_irq(rt_int32_t pin)`
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|----------|-----------|
+| pin | gpio编号 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|----------|----------|
+| 管脚编号 | 解除成功 |
+| 错误码 | 解除失败 |
+
+##### 2.1.3.6 kd_pin_irq_enable
+
+【描述】
+
+gpio管脚的中断使能。
+
+【语法】
+
+`kd_pin_irq_enable(rt_base_t pin, rt_uint32_t enabled)`
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|----------------------|-----------|
+| pin | gpio编号 | 输入 |
+| enabled | 是否使能。`True/false` | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|----------|
+| RT_EOK | 使能成功 |
+| 错误码 | 使能失败 |
+
+##### 2.1.3.7 gpio_device_ioctl
+
+【描述】
+
+gpio功能控制。
+
+【语法】
+
+`gpio_device_ioctl(rt_device_t dev, int cmd, void *args)`
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|---------|-----------|----------|
+| dev | gpio句柄 | 输入 |
+| cmd | 控制命令。 `KD_GPIO_DM_OUTPUT`、 `KD_GPIO_DM_INPUT`、 `KD_GPIO_DM_INPUT_PULL_UP`、 `KD_GPIO_DM_INPUT_PULL_DOWN`、 `KD_GPIO_WRITE_LOW`、 `KD_GPIO_WRITE_HIGH`、 `KD_GPIO_READ_VALUE` | 输入 |
+| args | 用于从用户传下来的数据结构指针,数据结构中应包含管脚编号 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|------|
+| RT_EOK | 成功 |
+| 错误码 | 失败 |
+
+【芯片差异】
+
+无。
+
+【需求】
+
+头文件:`drv_gpio.h`
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+#### 2.1.4 Hard-lock
+
+Hard-lock模块提供以下API:
+
+- [kd_request_lock](#2141-kd_request_lock)
+- [kd_hardlock_lock](#2142-kd_hardlock_lock)
+- [kd_hardlock_unlock](#2143-kd_hardlock_unlock)
+
+##### 2.1.4.1 kd_request_lock
+
+【描述】
+
+申请使用锁。
+
+【语法】
+
+`kd_request_lock(rt_uint32_t num)`
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|----------------|-----------|
+| num | 锁编号。0\~127 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|----------|
+| 0 | 申请成功 |
+| -1 | 申请失败 |
+
+##### 2.1.4.2 kd_hardlock_lock
+
+【描述】
+
+加锁。
+
+【语法】
+
+`kd_hardlock_lock (rt_uint32_t num)`
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|----------------|-----------|
+| num | 锁编号。0\~127 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|--------|------------------------------|
+| 0 | 加锁成功 |
+| -1 | 锁正在加锁状态,本次无法加锁 |
+
+##### 2.1.4.3 kd_hardlock_unlock
+
+【描述】
+
+加锁。
+
+【语法】
+
+`kd_hardlock_unlock (rt_uint32_t num)`
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|----------------|-----------|
+| num | 锁编号。0\~127 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|----------|------|
+| 无返回值 | |
+
+【芯片差异】
+
+无。
+
+【需求】
+
+头文件:`drv_hardlock.h`
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+#### 2.1.5 ADC
+
+ADC 模块提供以下API:
+
+- [rt_device_find](#2151-rt_device_find)
+- [rt_adc_enable](#2152-rt_adc_enable)
+- [rt_adc_read](#2153-rt_adc_read)
+- [rt_adc_disable](#2154-rt_adc_disable)
+
+##### 2.1.5.1 rt_device_find
+
+【描述】
+
+应用程序根据 ADC 设备名称获取设备句柄,进而可以操作 ADC 设备。
+
+【语法】
+
+`rt_device_t rt_device_find(const char* name);`
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|---------------|-----------|
+| name | adc 设备名称 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|----------|------------------------------------|
+| 设备句柄 | 查找到对应设备将返回相应的设备句柄 |
+| RT_NULL | 没有找到设备 |
+
+【芯片差异】
+
+无。
+
+【需求】
+
+- 头文件:`rtdevice.h`、`rtthread.h`
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+##### 2.1.5.2 rt_adc_enable
+
+【描述】
+
+在读取 adc 设备数据前需要先使能设备,通过此函数使能 adc。
+
+【语法】
+
+`rt_err_t rt_adc_enable(rt_adc_device_t dev, rt_uint32_t channel);`
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|--------------|-----------|
+| dev | adc 设备句柄 | 输入 |
+| channel | adc 通道 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|------------|------------------------|
+| RT_EOK | 成功 |
+| -RT_ENOSYS | 失败,设备操作方法为空 |
+| 其他错误码 | 失败 |
+
+【芯片差异】
+
+无。
+
+【需求】
+
+- 头文件:`rtdevice.h`、`rtthread.h`
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+##### 2.1.5.3 rt_adc_read
+
+【描述】
+
+读取 adc 通道采样值可通过此函数完成。
+
+【语法】
+
+`rt_err_t rt_adc_read(rt_adc_device_t dev, rt_uint32_t channel);`
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|--------------|-----------|
+| dev | adc 设备句柄 | 输入 |
+| channel | adc 通道 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|------------|------------|
+| 读取的数值 | 读取的数值 |
+
+【芯片差异】
+
+无。
+
+【需求】
+
+- 头文件:`rtdevice.h`、`rtthread.h`
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+##### 2.1.5.4 rt_adc_disable
+
+【描述】
+
+关闭 adc 通道可通过此函数完成。
+
+【语法】
+
+`rt_err_t rt_adc_disable(rt_adc_device_t dev, rt_uint32_t channel);`
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|--------------|-----------|
+| dev | adc 设备句柄 | 输入 |
+| channel | adc 通道 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|------------|------------------------|
+| RT_EOK | 成功 |
+| -RT_ENOSYS | 失败,设备操作方法为空 |
+| 其他错误码 | 失败 |
+
+【芯片差异】
+
+无。
+
+【需求】
+
+- 头文件:`rtdevice.h`、`rtthread.h`
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+#### 2.1.6 WDT
+
+WDT 模块提供以下API:
+
+- [rt_device_find](#2161-rt_device_find)
+- [rt_device_init](#2162-rt_device_init)
+- [rt_device_control](#2163-rt_device_control)
+
+##### 2.1.6.1 rt_device_find
+
+【描述】
+
+应用程序根据 WDT 设备名称获取设备句柄,进而可以操作 WDT 设备。
+
+【语法】
+
+`rt_device_t rt_device_find(const char* name);`
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|---------------|-----------|
+| name | wdt 设备名称 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|----------|------------------------------------|
+| 设备句柄 | 查找到对应设备将返回相应的设备句柄 |
+| RT_NULL | 没有找到设备 |
+
+【芯片差异】
+
+无。
+
+【需求】
+
+- 头文件:`rtdevice.h`、`rtthread.h`
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+##### 2.1.6.2 rt_device_init
+
+【描述】
+
+初始化 WDT 设备,主要是对`timeout table`的初始化。
+
+【语法】
+
+`rt_err_t rt_device_init(rt_device_t dev)`
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|---------------|-----------|
+| dev | wdt 设备句柄 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|-----------|---------------|
+| RT_EOK | 初始化成功 |
+
+【芯片差异】
+
+无。
+
+【需求】
+
+- 头文件:`rtthread.h`
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+##### 2.1.6.3 rt_device_control
+
+【描述】
+
+功能型函数,根据传入cmd不同可以向下调用不同功能,类似用户层ioctl的功能。
+
+【语法】
+
+`rt_err_t rt_device_control(rt_device_t dev, int cmd, void *arg)`
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|---------------|-----------|
+| dev | wdt 设备句柄 | 输入 |
+| cmd | wdt contrl函数宏定义 | 输入 |
+| arg | 传入的数据的指针 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|-----------|-----------------|
+| RT_EOK | 功能调用成功 |
+| RT_EINVAL | 传入cmd无效 |
+| RT_ENOSYS | 驱动无contrl接口 |
+
+【芯片差异】
+
+无。
+
+【需求】
+
+- 头文件:`rtthread.h`
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+#### 2.1.7 OTP
+
+大核 rt-smart 中,OTP 模块主要提供了以下 API:
+
+- [otp_device_read](#2171-otp_device_read)
+- [otp_device_write](#2172-otp_device_write)
+
+##### 2.1.7.1 otp_device_read
+
+【描述】
+
+读 OTP 空间,可读范围:偏移量 0x0~0xbfc,size 为 0xc00。
+
+【语法】
+
+otp_device_read(rt_device_t dev, rt_off_t pos, void \*buffer, rt_size_t size);
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|-----------------|----------------------------------------------|-----------|
+| dev | 设备句柄 | 输入 |
+| pos | 要读取地址的偏移量 | 输入 |
+| buffer | 内存缓冲区指针,读取的数据将会被保存在缓冲区中 | 输出 |
+| size | 读取数据的大小(byte) | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|-----------------------|---------------------------------|
+| 读到数据的实际大小 | 以字节 byte 为单位 |
+| 0 | 读取失败,参考错误码定义 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:drv_otp.h
+- 库文件:无
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+##### 2.1.7.2 otp_device_write
+
+【描述】
+
+写 OTP 空间,可写范围:偏移量 0x0~0x1fc,size 为 0x200。
+
+【语法】
+
+otp_device_write(rt_device_t dev, rt_off_t pos, const void \*buffer, rt_size_t size);
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|-----------------|----------------------------------------------|-----------|
+| dev | 设备句柄 | 输入 |
+| pos | 要写入数据的偏移量 | 输入 |
+| buffer | 内存缓冲区指针,放置要写入的数据 | 输出 |
+| size | 吸入数据的大小(byte) | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|-----------------------|---------------------------------|
+| 写入数据的实际大小 | 以字节 byte 为单位 |
+| 0 | 写入失败,参考错误码定义 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:drv_otp.h
+- 库文件:无
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+#### 2.1.8 TS
+
+大核 rt-smart 中,TS 模块主要提供了以下 API:
+
+- [ts_device_read](#2181-ts_device_read)
+
+##### 2.1.8.1 ts_device_read
+
+【描述】
+
+读芯片结温。
+
+【语法】
+
+ts_device_read(rt_device_t dev, rt_off_t pos, void \*buffer, rt_size_t size);
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|-----------------|----------------------------------------------|-----------|
+| dev | 设备句柄 | 输入 |
+| pos | 要读取地址的偏移量,设置为0 | 输入 |
+| buffer | 内存缓冲区指针,读取的数据将会被保存在缓冲区中 | 输出 |
+| size | 读取数据的大小(byte),设置为0 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|-----------------------|---------------------------------|
+| 读到数据的实际大小 | 以字节 byte 为单位 |
+| 0 | 读取失败,参考错误码定义 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:drv_ts.h
+- 库文件:无
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+#### 2.1.9 PWM
+
+PWM模块提供以下内核态API:
+
+- [rt_pwm_set](#2191-rt_pwm_set)
+- [rt_pwm_enable](#2192-rt_pwm_enable)
+- [rt_pwm_disable](#2193-rt_pwm_disable)
+
+##### 2.1.9.1 rt_pwm_set
+
+【描述】
+
+设置PWM设备的周期和正脉冲宽度。
+
+【语法】
+
+`rt_pwm_set(struct rt_device_pwm *device, int channel, rt_uint32_t period, rt_uint32_t pulse)`
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|---------------|-----------|
+| device | PWM 设备句柄 | 输入 |
+| channel | pwm通道号 | 输入 |
+| period | pwm周期(ns) | 输入 |
+| pulse | pwm正脉冲宽度(ns) | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|-------------|----------------|
+| RT_EOK | 成功 |
+| -RT_EIO | device 为空 |
+| -RT_ENOSYS | 设备操作方法为空 |
+| 其他错误码 | 执行失败 |
+
+【芯片差异】
+
+无。
+
+【需求】
+
+- 头文件:`drivers/rt_drv_pwm.h`
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+##### 2.1.9.2 rt_pwm_enable
+
+【描述】
+
+使能 PWM 设备。
+
+【语法】
+
+`rt_err_t rt_pwm_enable(struct rt_device_pwm *device, int channel);`
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|---------------|-----------|
+| device | PWM 设备句柄 | 输入 |
+| channel | pwm通道号 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|-------------|-----------------|
+| RT_EOK | 设备使能成功 |
+| -RT_ENOSYS | 设备操作方法为空 |
+| 其他错误码 | 设备使能失败 |
+
+【芯片差异】
+
+无。
+
+【需求】
+
+- 头文件:`drivers/rt_drv_pwm.h`
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+##### 2.1.9.3 rt_pwm_disable
+
+【描述】
+
+关闭 PWM 设备对应通道。
+
+【语法】
+
+`rt_err_t rt_pwm_disable(struct rt_device_pwm *device, int channel);`
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|---------------|-----------|
+| device | PWM 设备句柄 | 输入 |
+| channel | pwm通道号 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|-------------|-----------------|
+| RT_EOK | 设备关闭成功 |
+| -RT_EIO | 设备句柄为空 |
+| 其他错误码 | 设备关闭失败 |
+
+【芯片差异】
+
+无。
+
+【需求】
+
+- 头文件:`drivers/rt_drv_pwm.h`
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+#### 2.1.10 RTC
+
+PWM模块提供以下内核态API:
+
+- [set_date](#21101-set_date)
+- [set_time](#21102-set_time)
+
+##### 2.1.10.1 set_date
+
+【描述】
+
+设置日期,年、月、日。
+
+【语法】
+
+`rt_err_t set_date(rt_uint32_t year, rt_uint32_t month, rt_uint32_t day)`
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|---------------|-----------|
+| year | 待设置的年份 | 输入 |
+| month | 待设置的月份 | 输入 |
+| day | 待设置的日 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|-------------|-----------------------|
+| RT_EOK | 设置成功 |
+| -RT_ERROR | 失败,没有找到 rtc 设备 |
+| 其他错误码 | 失败 |
+
+【芯片差异】
+
+无。
+
+【需求】
+
+- 头文件:`time.h`
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+##### 2.1.10.2 set_time
+
+【描述】
+
+设置日期,年、月、日。
+
+【语法】
+
+`rt_err_t set_time(rt_uint32_t hour, rt_uint32_t minute, rt_uint32_t second)`
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|---------------|-----------|
+| hour | 待设置的时 | 输入 |
+| minute | 待设置的分 | 输入 |
+| second | 待设置的秒 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|-------------|-----------------------|
+| RT_EOK | 设置成功 |
+| -RT_ERROR | 失败,没有找到 rtc 设备 |
+| 其他错误码 | 失败 |
+
+【芯片差异】
+
+无。
+
+【需求】
+
+- 头文件:`time.h`
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+#### 2.1.11 TIMER
+
+TIMER模块提供以下内核态API:
+
+- `rt_device_open`
+- `rt_device_control`
+- [rt_device_set_rx_indicate](#21111-rt_device_set_rx_indicate)
+- `rt_device_read`
+- `rt_device_write`
+
+##### 2.1.11.1 rt_device_set_rx_indicate
+
+【描述】
+
+设置回调函数,用于device接收到数据时调用。
+
+【语法】
+
+`rt_err_t rt_device_set_rx_indicate(rt_device_t dev, rt_err_t (*rx_ind)(rt_device_t dev, rt_size_t size))`
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|---------------|-----------|
+| dev | 打开的设备句柄 | 输入 |
+| *rx_ind | 回调函数指针 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|-------------|-----------------------|
+| RT_EOK | 设置成功 |
+| 其他错误码 | 失败 |
+
+【芯片差异】
+
+无。
+
+【需求】
+
+- 头文件:`rtthread.h`
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+### 2.2 用户态 API
+
+#### 2.2.1 ADC
+
+ADC 模块在用户态提供以下API:
+
+- [rt_device_find](#2211-rt_device_find)
+- [rt_device_open](#2212-rt_device_open)
+- [rt_device_control](#2213-rt_device_control)
+- [rt_device_read](#2214-rt_device_read)
+
+##### 2.2.1.1 rt_device_find
+
+【描述】
+
+查找设备。该函数通过指定的名称查找设备。应用程序根据设备名称获取设备句柄,进而可以操作设备。
+
+【语法】
+
+`rt_device_t rt_device_find(const char *name);`
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|---------------|-----------|
+| name | 设备的名称。 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|-------------|------------------|
+| rt_device_t | 成功返回设备句柄 |
+| RT_NULL | 失败返回 RT_NULL |
+
+【芯片差异】
+
+无。
+
+【需求】
+
+- 头文件:`rtdevice.h`、`rtthread.h`
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+##### 2.2.1.2 rt_device_open
+
+【描述】
+
+打开设备。通过设备句柄,应用程序可以打开和关闭设备,打开设备时会检测设备是否已经初始化,没有初始化则会默认调用初始化接口初始化设备。
+
+【语法】
+
+`rt_err_t rt_device_open(rt_device_t dev, rt_uint16_t oflag);`
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|------------------------------------------------|-----------|
+| dev | 设备句柄 | 输入 |
+| oflag | 设备的打开模式标志位,支持 `RT_DEVICE_FLAG_RDWR` | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|-----------|-----------------|
+| RT_EOK | 成功返回 RT_EOK |
+| rt 错误码 | 失败返回错误码 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:`rtdevice.h`、`rtthread.h`
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+##### 2.2.1.3 rt_device_control
+
+【描述】
+
+该函数将在设备上执行各种控制功能,通过此函数使能 adc 设备的某个通道。
+
+【语法】
+
+`rt_err_t rt_device_control(rt_device_t dev, int cmd, void *arg);`
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|------------------------------------------------------------------------------------------------|-----------|
+| dev | 设备句柄 | 输入 |
+| cmd | 命令控制字,这个参数通常是与设备驱动程序相关。0 代表使能 adc 对应通道,1 代表关闭 adc 对应通道 | 输入 |
+| arg | 控制命令相关的参数。这里对应 adc 通道号 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|-----------|-----------------|
+| RT_EOK | 成功返回 RT_EOK |
+| rt 错误码 | 失败返回错误码 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:`rtdevice.h`、`rtthread.h`
+
+【注意】
+
+- 应该使用 1.2.2 节中第三部分示例代码传入通道号。
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+##### 2.2.1.4 rt_device_read
+
+【描述】
+
+该函数将从设备读取数据。参数为 adc 设备句柄时,该函数将读取 adc 通道的采样值。
+
+【语法】
+
+`rt_size_t rt_device_read(rt_device_t dev, rt_off_t pos, void *buffer, rt_size_t size);`
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|----------------------------------------------------------------|-----------|
+| dev | 设备句柄。在这里使用获取的 adc 设备句柄 | 输入 |
+| pos | 读取的偏移量。在这里对应通道号 | 输入 |
+| buffer | 用于保存读取数据的数据缓冲区。在这里应该使用一个 32 位无符号数 | 输出 |
+| size | 缓冲区的大小。在这里应该为 4 字节 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|-----------|----------------------------------------------------------------------------------------------------|
+| rt_size_t | 成功则返回实际读取的大小,如果是字符设备,返回大小以字节为单位,如果是块设备,返回的大小以块为单位 |
+| buffer | 用户保存读取数据的数据缓冲区。在这里是 adc 通道的采样值 |
+| 0 | 失败则返回 0 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:`rtdevice.h`、`rtthread.h`
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+#### 2.2.2 WDT
+
+WDT 模块在用户态可以使用posix接口:
+
+- [open](#2221-open)
+- [ioctl](#2222-ioctl)
+
+##### 2.2.2.1 open
+
+【描述】
+
+从用户态打开设备节点。
+
+语法】
+
+`int open(const char *file, int flags, ...);`
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|----------------------------------------------------------------|-----------|
+| file | 设备节点路径 | 输入 |
+| flags | 模式 `O_RDONLY` `O_WRONLY` `O_RDWR`等 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|-----------|------------------------------|
+| 大于0 | 成功则返回打开的设备节点描述符 |
+| 小于0 | 失败 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:`fcntl.h`
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+##### 2.2.2.2 ioctl
+
+【描述】
+
+通过传入不同的参数调用驱动的不同功能。
+
+语法】
+
+`int ioctl(int fildes, int cmd, ...);`
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|----------------------------------------------------------------|-----------|
+| fildes | 设备描述符 | 输入 |
+| cmd | 命令 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|-----|-----|
+| 0 | 成功 |
+| 非0 | 失败 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:`sys/ioctl.h`
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+#### 2.2.3 OTP
+
+OTP 模块在用户态提供以下API:
+
+- [rt_device_find](#2231-rt_device_find)
+- [rt_device_open](#2232-rt_device_open)
+- [rt_device_read](#2233-rt_device_read)
+- [rt_device_write](#2234-rt_device_write)
+- [rt_device_close](#2235-rt_device_close)
+
+##### 2.2.3.1 rt_device_find
+
+【描述】
+
+查找设备。该函数通过指定的名称查找设备。应用程序根据设备名称获取设备句柄,进而可以操作设备。
+
+【语法】
+
+`rt_device_t rt_device_find(const char *name);`
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|---------------|-----------|
+| name | 设备的名称。 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|-------------|------------------|
+| rt_device_t | 成功返回设备句柄 |
+| RT_NULL | 失败返回 RT_NULL |
+
+【芯片差异】
+
+无。
+
+【需求】
+
+- 头文件:`rtdevice.h`、`rtthread.h`
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+##### 2.2.3.2 rt_device_open
+
+【描述】
+
+打开设备。通过设备句柄,应用程序可以打开和关闭设备,打开设备时会检测设备是否已经初始化,没有初始化则会默认调用初始化接口初始化设备。
+
+【语法】
+
+`rt_err_t rt_device_open(rt_device_t dev, rt_uint16_t oflag);`
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|------------------------------------------------|-----------|
+| dev | 设备句柄 | 输入 |
+| oflag | 设备的打开模式标志位,支持 `RT_DEVICE_FLAG_RDWR` | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|-----------|-----------------|
+| RT_EOK | 成功返回 RT_EOK |
+| rt 错误码 | 失败返回错误码 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:`rtdevice.h`、`rtthread.h`
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+##### 2.2.3.3 rt_device_read
+
+【描述】
+
+从 OTP 设备中读取数据,可读范围:偏移量 0x0~0xbfc,size 为 0xc00。
+
+【语法】
+
+`rt_size_t rt_device_read(rt_device_t dev, rt_off_t pos, void *buffer, rt_size_t size);`
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|----------------------------------------------------------------|-----------|
+| dev | 设备句柄。在这里使用获取的 otp 设备句柄 | 输入 |
+| pos | 读取的偏移量。在这里对应要读取地址的偏移量 | 输入 |
+| buffer | 用于保存读取数据的数据缓冲区。在这里应该使用一个 32 位无符号数 | 输出 |
+| size | 缓冲区的大小。在这里对应读取数据的大小(bytes) | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|-----------|----------------------------------------------------------------------------------------------------|
+| rt_size_t | 成功则返回实际读取的大小,以字节为单位 |
+| 0 | 失败则返回 0 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:`rtdevice.h`、`rtthread.h`
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+##### 2.2.3.4 rt_device_write
+
+【描述】
+
+向 OTP 设备中写入数据,可写范围:偏移量 0x0~0x1fc,size 为 0x200。
+
+【语法】
+
+`rt_size_t otp_device_write(rt_device_t dev, rt_off_t pos, const void *buffer, rt_size_t size);`
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|----------------------------------------------------------------|-----------|
+| dev | 设备句柄。在这里使用获取的 otp 设备句柄 | 输入 |
+| pos | 偏移量。在这里对应要写入数据的偏移量 | 输入 |
+| buffer | 用于保存读取数据的数据缓冲区。放置要写入的数据 | 输出 |
+| size | 缓冲区的大小。在这里对应写入数据的大小(bytes) | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|-----------|----------------------------------------------------------------------------------------------------|
+| rt_size_t | 成功则返回实际写入数据的大小,以字节为单位 |
+| 0 | 失败则返回 0 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:`rtdevice.h`、`rtthread.h`
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+##### 2.2.3.5 rt_device_close
+
+【描述】
+
+关闭设备。
+
+【语法】
+
+`rt_err_t rt_device_close(rt_device_t dev);`
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|----------|----------------------------------------------------------------|-----------|
+| dev | 设备句柄。在这里使用获取的 otp 设备句柄 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|-----------|----------------------------------------------------------------------------------------------------|
+| rt_err_t | 成功则关闭设备 |
+| 错误码 | 失败则返回错误码 |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:`rtdevice.h`、`rtthread.h`
+
+【注意】
+
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+#### 2.2.4 TS
+
+TS 模块在用户态提供以下 API,这些 API 跟 OTP 提供的 API 保持一致,请参考 [OTP](#223-otp) 中对于用户态 API 的介绍。
+
+- rt_device_find
+- rt_device_open
+- rt_device_read
+- rt_device_close
+
+## 3. 数据类型
+
+UART模块使用到的数据类型:未定义私有数据类型
+
+I2C模块使用到的数据类型:未定义私有数据类型
+
+ADC 模块使用到的数据类型:未定义私有数据类型
+
+GPIO模块使用到的数据类型:
+
+- [struct rt_device_gpio](#31-struct-rt_device_gpio)
+
+ADC 模块使用到的数据类型:未定义私有数据类型
+
+Hard-lock模块使用到的数据类型:
+
+- [struct device_hardlock](#32-device_hardlock)
+
+WDT 模块使用到的数据类型:未定义私有数据类型
+
+OTP 模块使用到的数据类型:未定义私有数据类型
+
+TS 模块使用到的数据类型:未定义私有数据类型
+
+PWM 模块使用到的数据类型:未定义私有数据类型
+
+RTC 模块使用到的数据类型:
+
+- [struct kd_alarm_setup](#33-struct-kd_alarm_setup)
+
+### 3.1 struct rt_device_gpio
+
+【说明】
+
+用户传进来的gpio管脚和读取管脚时用于装载返回值的集合。
+
+【定义】
+
+```text
+struct rt_device_gpio
+{
+ rt_uint16_t pin; //管脚标号
+ rt_uint16_t value; //读管脚电平时用于装载读回的电平值
+};
+```
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+无
+
+### 3.2 device_hardlock
+
+【说明】
+
+驱动中对hardlock设备的抽象。
+
+【定义】
+
+```text
+struct device_hardlock
+{
+ volatile void *hw_base; // 模块内核基地址
+ char used[HARDLOCK_MAX]; //用于标志锁是否被使用,申请时会将对应编号置1
+};
+```
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+无
+
+### 3.3 struct kd_alarm_setup
+
+【说明】
+
+在配置RTC中断时,将中断类型和定时时间一同向下注册进驱动中。
+
+【定义】
+
+```text
+struct kd_alarm_setup
+{
+ rt_uint32_t flag; /* alarm flag */
+ struct tm tm; /* when will the alarm wake up user */
+};
+```
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+无
+
+## 4. 错误码
+
+| 错误代码 | 宏定义 | 描述 |
+|----------|--------|------------|
+| RT_EOK | 0 | 成功 |
+| RT_ERROR | 1 | 发生了错误 |
+
+## 5. 计算公式
+
+### 5.1 ADC 计算公式
+
+adc 硬件参考电压为 1.8V,12 bit 数字信号输出,受噪声干扰有效位为 10 bit。通过 API 获取 adc 采样电压值以后,转换为实际电压值的计算公式如下:
+
+例如,在 msh 获取 adc 的采样值为 0x713,即 1811 时,实际电压值为:
+
+V\~1.8V,浮动范围为 5mv。
+
+### 5.2 WDT超时时间计算公式
+
+```text
+value = clock * timeout; timeout:用户设置的超时时间,单位是:秒
+log2(value) = ret + 16;
+ret = log2(value) - 16;
+```
+
+ret就是最终将要配置到wdt模块的超时时间值。
+
+用户并不需要关心超时时间如何计算,计算过程已经在驱动中实现,当用户调用ioctl或rt_device_control配置超时时间时,驱动将会找到一个最接近用户设置的时间的值配置进wdt模块。
diff --git "a/zh/01_software/board/osdrv/K230_\345\260\217\346\240\270Linux\351\251\261\345\212\250_API\345\217\202\350\200\203.md" "b/zh/01_software/board/osdrv/K230_\345\260\217\346\240\270Linux\351\251\261\345\212\250_API\345\217\202\350\200\203.md"
new file mode 100755
index 0000000..26284d2
--- /dev/null
+++ "b/zh/01_software/board/osdrv/K230_\345\260\217\346\240\270Linux\351\251\261\345\212\250_API\345\217\202\350\200\203.md"
@@ -0,0 +1,761 @@
+# K230小核Linux驱动API参考
+
+
+
+版权所有©2023北京嘉楠捷思信息技术有限公司
+
+
+
+## 免责声明
+
+您购买的产品、服务或特性等应受北京嘉楠捷思信息技术有限公司(“本公司”,下同)及其关联公司的商业合同和条款的约束,本文档中描述的全部或部分产品、服务或特性可能不在您的购买或使用范围之内。除非合同另有约定,本公司不对本文档的任何陈述、信息、内容的正确性、可靠性、完整性、适销性、符合特定目的和不侵权提供任何明示或默示的声明或保证。除非另有约定,本文档仅作为使用指导参考。
+
+由于产品版本升级或其他原因,本文档内容将可能在未经任何通知的情况下,不定期进行更新或修改。
+
+## 商标声明
+
+、“嘉楠”和其他嘉楠商标均为北京嘉楠捷思信息技术有限公司及其关联公司的商标。本文档可能提及的其他所有商标或注册商标,由各自的所有人拥有。
+
+**版权所有 © 2023北京嘉楠捷思信息技术有限公司。保留一切权利。**
+非经本公司书面许可,任何单位和个人不得擅自摘抄、复制本文档内容的部分或全部,并不得以任何形式传播。
+
+
+
+## 目录
+
+[TOC]
+
+## 前言
+
+### 概述
+
+本文档主要介绍K230小核Linux的驱动api,主要包括uart、i2c、gpio、watchdog、hardlock、OTP、Tsensor、TRNG等。
+
+### 读者对象
+
+本文档(本指南)主要适用于以下人员:
+
+- 技术支持工程师
+- 软件开发工程师
+
+### 缩略词定义
+
+| 简称 | 说明 |
+|-----------|---------------------------------------------|
+| UART | Universal Asynchronous Receiver/Transmitter |
+| I2C | Inter-Integrated Circuit |
+| GPIO | General-purpose input/output |
+| Hard-lock | 硬件互斥锁 |
+| WDT | watchdog |
+| OTP | One-Time Programmable |
+| TS | Temperature Sensor |
+| TRNG | True Random Number Generator |
+
+### 修订记录
+
+| 文档版本号 | 修改说明 | 修改者 | 日期 |
+|------------|----------|--------|---------|
+| V1.0 | 初版 | 范俊涛 | 2023/5/26 |
+
+## 1 概述
+
+### 1.1 概述
+
+UART:
+通用异步收发器,该总线双向通信,可以实现全双工传输和接收。在嵌入式设计中,UART用来与PC进行通信,包括与监控调试器和其它器件,如EEPROM通信。
+
+I2C:
+由Philips公司(2006年迁移到NXP)在1980年代初开发的一种简单、双线双向的同步串行总线,它利用一根时钟线和一根数据线在连接总线的两个器件之间进行信息的传递,为设备之间数据交换提供了一种简单高效的方法。每个连接到总线上的器件都有唯一的地址,任何器件既可以作为主机也可以作为从机,但同一时刻只允许有一个主机。
+
+GPIO:
+(general porpose intput output)通用输入输出端口的简称。可以通过软件控制其输出和输入,通俗来说就是常用引脚,可以控制引脚的高低电平,对其进行读取或者写入。
+
+Hard-lock:
+嘉楠自研模块,用于同核不通进程间或异核之间对共享资源的互斥而实现的硬件互斥锁,可用于对共享资源的互斥使用。
+
+WDT:
+WDT是watchdog的简称,本质上是一个硬件定时器,软件程序需要每隔一段时间喂一次狗,如果WDT超时则可以产生一个中断信号或复位信号到CPU,由此通过软硬件结合的方式防止程序运行异常而不能恢复。
+
+OTP:
+OTP 主要用于存储安全敏感的机密信息,例如 bootrom 的固件信息、加解密密钥、签名信息以及用户自己定义的安全信息等。
+
+TS:
+K230 TS(Temperature Sensor),自研温度传感器,采用 TSMC 12nm 工艺,TS 的应用场景是降频。
+
+TRNG:
+TRNG 主要用于产生真随机数,从而为加解密运算提供一个随机熵源。
+
+### 1.2 功能描述
+
+#### 1.2.1 uart模块
+
+K230共有5路uart,且uart模块支持红外模式,支持RS485模式,支持DMA,部分端口支持流控,数据位支持5/6/7/8比特,停止位1/2比特,波特率可以支持到1.5MHz。
+
+#### 1.2.2 i2c模块
+
+K230共有5路i2c,i2c模块支持主模式,支持DMA,支持7/10比特寻址,支持中断,i2c模块传输速率支持100k/400k/1M/3.4M.
+
+#### 1.2.3 gpio模块
+
+k230共有2路gpio,每路gpio包含32个gpio端口,共64个gpio端口,每个gpio端口均支持输入输出功能,支持上升沿中断,下降沿中断,高低电平中断,和双边沿中断。k230的每个gpio端口的中断相互独立互不影响。
+
+#### 1.2.4 hard-lock模块
+
+k230有128个硬件互斥锁,其作用类似Linux的自旋锁,可以用于对同一资源的互斥。
+
+#### 1.2.5 wdt模块
+
+wdt,watchdog模块,k230有两路wdt,大小核分别使用一路,wdt支持中断和复位两种模式,默认使用复位模式,即当wdt的超时时间溢出时,直接使soc复位。
+
+#### 1.2.6 OTP模块
+
+OTP 集成在安全模块 PUF 中,为整个 SoC 提供安全存储功能,保护根密钥和启动代码等关键数据不被攻击者破坏。小核侧 OTP 驱动主要提供读功能,可读区域为包括生产信息在内的 24Kbits 空间。Linux 侧 OTP 驱动挂载在 nvmem 框架上,具体的框架结构如下图所示:
+
+
+
+#### 1.2.7 TS模块
+
+大核侧 TS 驱动主要提供读功能,在读 TS 之前,首先需要配置 TS 寄存器使能信号、输出模式,然后才能读出芯片的结温。另外,TS 寄存器每 2.6s 读取一次芯片结温。Rt-smart 侧 TS 驱动的结构如下图所示:
+
+
+
+#### 1.2.8 TRNG模块
+
+TRNG 集成在安全模块 PUF 中,为整个 SoC 提供真随机数功能,保护根密钥和启动代码等关键数据不被攻击者破坏。小核侧 TRNG 驱动主要提供读功能,TRNG 驱动挂载在 HW random 框架上,具体的框架结构如下图所示:
+
+
+
+## 2 API参考
+
+### 2.1 UART API参考
+
+Linux封装了termios API用来给用户使用,termios API描述了一个通用的终端接口,提供了控制异步通讯端口的配置和读写。
+
+```text
+termios API举例:
+int tcgetattr(int fd,struct termios *termios_p);
+int tcsetattr(int fd,int potional_actions,struct termios *termios_p);
+int tcsendbreak(int fd,int duration);
+int tcdrain(int fd);
+int tcflush(int fd, int queue_selector);
+int tcflow(int fd, int action);
+void cfmakeraw(struct termios *termios_p);
+speed_t cfgetispeed(const struct termios *termios_p);
+speed_t cfgetospeed(const struct termios *termios_p);
+int cfsetispeed(struct termios *termios_p, speed_t speed);
+int cfsetospeed(struct termios *termios_p, speed_t speed);
+int cfsetspeed(struct termios *termios_p, speed_t speed);
+```
+
+详细请参考`Documentation/driver-api/serial/tty.rst`。
+
+### 2.2 I2C API参考
+
+linux为用户称封装了系统调用来使用i2c。
+
+[open](#29-open)
+
+[ioctl](#210-ioctl)
+
+[read](#211-read)
+
+[write](#212-write)
+
+### 2.3 GPIO API参考
+
+#### 2.3.1 sysfs控制gpio
+
+GPIO驱动加载后会在 `/sys/class/gpio/` 下创建gpio端口的设备节点,每个节点代表一个gpio端口,通过sysfs操作这个gpio端口即可达到操作gpio输入输出和中断的作用。
+
+方法1:
+
+```text
+echo N > /sys/class/gpio/export //将编号为 N 的gpio端口导出到sysfs
+
+echo in > /sys/class/gpio/gpioN/direction //将该gpio端口设置成输入模式
+
+cat /sys/class/gpio/gpioN/value //读取该gpio端口电平状态
+
+echo out > /sys/class/gpio/gpioN/direction //将该gpio端口设置成输出模式
+
+echo 1 > /sys/class/gpio/gpioN/value //将该端口输出高电平,注意active_low极性
+
+echo 0 > /sys/class/gpio/gpioN/value //将该端口输出低电平,注意active_low极性
+
+设置中断属性:
+echo rising > /sys/class/gpio/gpioN/edge 上升沿中断,中断只能在direction为in时才可以设置
+
+echo falling > /sys/class/gpio/gpioN/edge 下降沿中断
+
+echo both > /sys/class/gpio/gpioN/edge 双边沿中断
+```
+
+方法2:
+
+```text
+设置好中断模式后通过poll函数监听中断:
+
+struct pollfd fds[1];
+fd = open("/sys/class/gpio/gpioN/value", O_RDONLY)
+
+fds[0].fd = gpio_fd;
+fds[0].events = POLLPRI;
+
+while(1)
+{
+ poll(fds, 1, -1);
+
+ if (fds[0].revents & POLLPRI)
+ {
+ /* 接收中断 */
+ }
+}
+
+```
+
+#### 2.3.2 ioctl控制gpio
+
+用户程序直接操作 `/dev/gpiochipN`:
+
+```text
+struct gpiohandle_request req;
+struct gpiohandle_data data;
+struct gpioevent_request event_req;
+struct gpioevent_data event_data;
+struct pollfd poll_fd;
+fd = open("/dev/gpiochipN", O_RDONLY);
+
+.....
+
+req.lineoffsets[0] = 0;
+req.flags = GPIOHANDLE_REQUEST_OUTPUT;
+req.lines = 1;
+
+event_req.lineoffset = 0;
+event_req.handleflags = GPIOHANDLE_REQUEST_INPUT;
+event_req.eventflags = GPIOEVENT_REQUEST_RISING_EDGE;
+
+ioctl(fd, GPIO_GET_LINEHANDLE_IOCTL, &req);
+ioctl(fd, GPIO_GET_LINEEVENT_IOCTL, &event_req);
+
+close(fd);
+
+poll_fd.fd = event_req.fd;
+poll_fd.events = POLLIN;
+
+while(1)
+{
+ data.values[0] = !data.values[0];
+ .....
+ ioctl(req.fd, GPIOHANDLE_SET_LINE_VALUES_IOCTL, &data);
+ .....
+
+ ret = poll(&poll_fd, 1, 3000);
+ if(ret == 0)
+ ....
+ else {
+ read(event_req.fd, &event_data, sizeof(event_data));
+ }
+}
+
+close(req.fd);
+
+```
+
+### 2.4 Hardlock API参考
+
+Hardlock未提供用户api接口,其使用方法仅限内核态驱动之间使用。
+
+### 2.5 Wadtchdog API参考
+
+#### 2.5.1 通过ioctl使用watchdog
+
+[open](#29-open)
+
+[ioctl](#210-ioctl)
+
+```text
+示例:
+fd = open("/dev/watchdog", O_WRONLY)
+
+.....
+
+ioctl(fd, WDIOC_SETTIMEOUT, &flags); /* 设置超时 */
+
+ioctl(fd, WDIOC_GETTIMEOUT, &flags); /* 获取超时设置 */
+
+ioctl(fd, WDIOC_SETPRETIMEOUT, &flags); /* 设置预超时 */
+
+ioctl(fd, WDIOC_GETPRETIMEOUT, &flags); /* 获取预超时 */
+
+ioctl(fd, WDIOC_GETTIMELEFT, &flags); /* 获取剩余超时时间 */
+
+ioctl(fd, WDIOC_KEEPALIVE, &dummy); /* 喂狗 */
+
+.....
+```
+
+#### 2.5.2 通过文件系统使用watchdog
+
+```text
+echo V > /dev/watchdog watchdog开始计时,内核自动喂狗线程启动
+
+echo A > /dev/watchdog 内核喂狗线程停止喂狗,但计时仍然继续,在默认超时时间后系统复位
+```
+
+> 注意:在命令行向watchdog节点写字符时,watchdog被使能并使用默认超时时间计数,且内核自动喂狗线程被唤醒
+
+### 2.6 OTP API 参考
+
+用户可通过 `sysfs` 来访问 OTP 硬件,还可以通过运行用户态程序读取 OTP 空间。
+
+#### 2.6.1 sysfs 文件系统
+
+Linux 内核使用 `sysfs` 文件系统,它的作用是将设备和驱动程序的信息导出到用户空间,方便了用户读取设备信息,同时支持修改和调整。`Sysfs` 虚拟文件系统一般被挂载在 `/sys` 目录下。OTP 一旦被注册到 Linux 中的 `NVMEM` 框架中之后,通过 `sysfs` 虚拟文件系统,可以很容易查看到 OTP 的信息。
+
+OTP sysfs位于 `/sys/bus/nvmem/devices/kendryte_otp0/` 目录下,文件结构如下:
+
+```shell
+.
+|-- nvmem
+|-- of_node -> ../../../../../../firmware/devicetree/base/soc/security/otp@91214000
+|-- subsystem -> ../../../../../../bus/nvmem
+|-- type
+|-- uevent
+
+```
+
+启动 Linux 之后,运行下列命令:
+
+```shell
+[root@canaan ~ ]# hexdump -C -v /sys/bus/nvmem/devices/kendryte_otp0/nvmem
+00000000 ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff |................|
+00000010 ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff |................|
+00000020 ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff |................|
+00000030 ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff |................|
+00000040 ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff |................|
+00000050 ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff |................|
+00000060 ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff |................|
+00000070 ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff |................|
+00000080 00 02 00 00 50 02 00 00 00 01 00 00 00 00 00 00 |....P...........|
+00000090 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 |................|
+000000a0 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 |................|
+......
+
+```
+
+或者,利用 `dd` 命令:
+
+```shell
+[root@canaan ~ ]# dd if=/sys/bus/nvmem/devices/kendryte_otp0/nvmem of=/tmp/file
+6+0 records in
+6+0 records out
+[root@canaan ~ ]# hexdump -C -v /tmp/file
+00000000 ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff |................|
+00000010 ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff |................|
+00000020 ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff |................|
+00000030 ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff |................|
+00000040 ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff |................|
+00000050 ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff |................|
+00000060 ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff |................|
+00000070 ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff |................|
+00000080 00 02 00 00 50 02 00 00 00 01 00 00 00 00 00 00 |....P...........|
+00000090 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 |................|
+......
+
+```
+
+#### 2.6.2 用户态访问 OTP
+
+编写一个用户态应用程序,用户态应用程序通过标准的系统调用open()、close()、read()等函数陷入到内核态,最终会调用 OTP 驱动中注册的接口中,以测试 OTP 功能。
+
+目前用户态应用程序已经编写完成,生成的可执行文件在 `/usr/bin/otp_test_demo` 目录下。
+
+运行步骤如下:
+
+1. 进入应用程序 demo 目录;
+1. 在 demo 目录下运行 otp demo,读取长度作为参数;
+1. 执行 otp demo。
+1. 改变读取长度(长度范围:1~768),重新执行 otp demo。
+
+启动小核Linux之后,运行下列命令:
+
+```shell
+[root@canaan ~ ]#cd /usr/bin/
+[root@canaan /usr/bin ]# ./otp_test_demo 768
+Addr Value
+00000000 0xffffffff
+00000004 0xffffffff
+00000008 0xffffffff
+0000000c 0xffffffff
+00000010 0xffffffff
+00000014 0xffffffff
+00000018 0xffffffff
+0000001c 0xffffffff
+00000020 0xffffffff
+00000024 0xffffffff
+00000028 0xffffffff
+0000002c 0xffffffff
+00000030 0xffffffff
+00000034 0xffffffff
+00000038 0xffffffff
+0000003c 0xffffffff
+00000040 0xffffffff
+......
+
+```
+
+#### 2.6.3 OTP 空间默认值
+
+OTP 空间默认值信息如下所示,请对照默认值验证读取OTP空间是否正确。
+
+```text
+00000000 ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff |................|
+*
+00000080 00 02 00 00 50 02 00 00 00 01 00 00 00 00 00 00 |....P...........|
+00000090 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 |................|
+*
+00000100 8d 3d da 24 1c f6 fa f6 88 4b c3 91 fb 2d 7b 09 |.=.$.....K...-{.|
+00000110 a6 64 03 7d ce 98 e0 d2 92 5a a0 cf 3c 58 50 d0 |.d.}.....Z..z..).qE.0.|
+00000140 91 3f a6 3d 48 30 dd 6d 18 c2 1c 13 97 fe 1f 9b |.?.=H0.m........|
+00000150 fd 08 1c 16 1b a7 9a 20 1d 80 70 8a 20 08 61 a3 |....... ..p. .a.|
+00000160 24 2b cf ec 97 9e 3f 25 89 b9 f2 a8 7a 63 5c c7 |$+....?%....zc\.|
+00000170 44 86 70 30 45 e4 4f 35 4d 2e 3e 8c e5 3a 49 29 |D.p0E.O5M.>..:I)|
+00000180 b6 06 6e 15 6b 62 d3 94 5f 8a ea e3 ea a3 a1 fc |..n.kb.._.......|
+00000190 0f 19 f5 50 05 4d 63 47 77 14 c1 c0 bf 06 3b 55 |...P.McGw.....;U|
+000001a0 47 be 7c c6 93 e2 e1 31 05 27 f5 a2 77 16 1f 75 |G.|....1.'..w..u|
+000001b0 5a 95 0a 15 24 16 a8 1a fc d8 67 f4 dd 15 e4 8c |Z...$.....g.....|
+000001c0 25 44 b9 48 59 b1 17 bb 8e 05 15 db ff fa 77 47 |%D.HY.........wG|
+000001d0 52 ce f7 86 bf 20 b5 46 ac 83 e9 ac 08 a7 e3 67 |R.... .F.......g|
+000001e0 02 24 50 de 49 9d 24 57 9f 78 bb 74 21 8f 74 f0 |.$P.I.$W.x.t!.t.|
+000001f0 47 25 9b cb 99 e7 6a 0f 51 52 be 4b ea 6a a3 ee |G%....j.QR.K.j..|
+00000200 7b 8d f8 ad c8 c6 5e c4 13 66 4b 50 3b 02 98 c8 |{.....^..fKP;...|
+00000210 20 11 c5 ca 54 ee 32 ea 89 e4 38 58 cd 5a cb 34 | ...T.2...8X.Z.4|
+00000220 2f d2 d9 b3 d9 97 50 a8 10 74 73 17 b0 76 19 ec |/.....P..ts..v..|
+00000230 8e 1e 07 58 ba f5 5b b9 a3 6e 0b f8 ae 8c ba 35 |...X..[..n.....5|
+00000240 53 6b 5d 52 9d e9 76 46 ae f7 1f 8d 45 b4 93 b6 |Sk]R..vF....E...|
+00000250 28 93 b4 07 6f 8e be 37 41 57 86 19 c1 d0 fb 9b |(...o..7AW......|
+00000260 8e 09 7a 77 a4 23 83 db 39 64 6c 5f 73 0d 82 2e |..zw.#..9dl_s...|
+00000270 ca 5b 2e c4 5f b0 6b 23 3d fd 96 88 e8 b9 e9 02 |.[.._.k#=.......|
+00000280 a8 e1 22 b1 c4 af 61 4c bc ab 93 a1 d1 80 aa 6f |.."...aL.......o|
+00000290 01 dc cd c1 a0 71 36 58 86 ed 7e d9 c1 15 95 50 |.....q6X..~....P|
+000002a0 f2 4e 9a 0e c9 d8 58 d6 14 93 c9 de 86 0e 87 52 |.N....X........R|
+000002b0 85 e6 ff d6 28 e8 dd 29 5a ab b4 b3 ce de 35 e9 |....(..)Z.....5.|
+000002c0 48 f2 1f a8 22 8f e3 17 d7 86 d8 e8 de 24 4d 2a |H..."........$M*|
+000002d0 70 89 37 47 9c 53 9b 33 0b 74 95 30 d6 4e e0 36 |p.7G.S.3.t.0.N.6|
+000002e0 bc 10 ff da ab bd 74 e7 df 04 08 11 e7 43 94 09 |......t......C..|
+000002f0 4d 74 df 13 84 a0 86 54 4c d0 cb c2 63 fb 42 7d |Mt.....TL...c.B}|
+00000300 5b e6 9d 3b dc 86 59 d7 cb df 29 65 53 51 54 8b |[..;..Y...)eSQT.|
+00000310 b1 50 96 a2 85 e0 b6 b4 d2 ce 6d 63 48 09 b3 62 |.P........mcH..b|
+00000320 9d f5 d4 16 4c 81 5f b4 e1 f7 91 7b 5f 7f c9 29 |....L._....{_..)|
+00000330 43 22 56 e8 f5 ae 68 b3 a0 a8 f9 7d 7b d9 b1 2e |C"V...h....}{...|
+00000340 98 25 07 7b 38 33 9c 99 f6 85 c7 49 cb dc 6f 1d |.%.{83.....I..o.|
+00000350 1c 45 d1 ff 57 a4 b9 d7 2a 6c 3f 9e dd 9a ee 5b |.E..W...*l?....[|
+00000360 f3 0b 21 af 2e d8 e5 ce 4f b7 4d 07 ea ba 5a e9 |..!.....O.M...Z.|
+00000370 df 85 d8 6d 88 78 84 9a dd 1a 4a 4a 86 2e e4 62 |...m.x....JJ...b|
+00000380 c2 94 4c e7 77 0b 2c 7a 38 03 2c 2a a1 f7 5b dd |..L.w.,z8.,*..[.|
+00000390 14 a7 d8 4a 66 38 d0 9f e8 28 a8 7c 33 36 39 72 |...Jf8...(.|369r|
+000003a0 1b 7b 84 68 a6 a8 dd 7e a9 5b f0 8e 2b 50 6e 40 |.{.h...~.[..+Pn@|
+000003b0 d2 a5 62 43 5e f1 f4 bf 90 11 0f e2 16 b5 80 4e |..bC^..........N|
+000003c0 10 68 a7 a2 aa 2d dd ba c1 d7 d6 0c b7 17 a5 a3 |.h...-..........|
+000003d0 c2 e2 77 e8 7c 9a ff 23 8c 30 ae b3 5a 79 1c fd |..w.|..#.0..Zy..|
+000003e0 77 4a f6 41 78 53 36 52 d4 45 a6 f9 c2 8e 8d fc |wJ.AxS6R.E......|
+000003f0 03 2e f4 00 58 e8 15 85 bf d9 3f b8 62 58 e2 97 |....X.....?.bX..|
+00000400 d2 ea 7f b2 a2 ef 40 f2 fc 68 07 64 51 f7 c9 6e |......@..h.dQ..n|
+00000410 68 eb 68 ec 15 a8 a7 7e 1d 86 8b 12 f1 33 a0 18 |h.h....~.....3..|
+00000420 21 06 f4 0a 58 4b ec 17 7d 87 2c ec ea ce 3e ce |!...XK..}.,...>.|
+00000430 02 2f 02 a5 76 61 57 dd 85 6e f5 14 d4 6b fb f9 |./..vaW..n...k..|
+00000440 64 d3 60 2c 1f 45 00 9c 50 d4 2a aa 1d f0 96 82 |d.`,.E..P.*.....|
+00000450 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 |................|
+*
+00000bf0 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 |................|
+
+```
+
+### 2.7 TS API 参考
+
+用户可通过 `sysfs` 来访问 TS 硬件,还可以通过运行用户态程序读取芯片结温。
+
+#### 2.7.1 sysfs 文件系统
+
+Linux 内核使用 `sysfs` 文件系统,它的作用是将设备和驱动程序的信息导出到用户空间,方便了用户读取设备信息,同时支持修改和调整。`sysfs` 虚拟文件系统一般被挂载在 `/sys` 目录下。TS 一旦被注册到 Linux 中的 Thermal 框架中之后,通过 `sysfs` 虚拟文件系统,可以很容易查看到 TS 的信息。
+
+TS sysfs位于 `/sys/class/thermal/thermal_zone0/` 目录下,文件结构如下:
+
+```shell
+.
+|-- available_policies
+|-- integral_cutoff
+|-- k_d
+|-- k_i
+|-- k_po
+|-- k_pu
+|-- mode
+|-- offset
+|-- passive
+|-- policy
+|-- slope
+|-- subsystem -> ../../../../class/thermal
+|-- sustainable_power
+|-- temp
+|-- type
+|-- uevent
+
+```
+
+启动 Linux 之后,运行下列命令:
+
+```shell
+[root@canaan ~ ]#cat /sys/class/thermal/thermal_zone0/temp
+7182
+......
+
+```
+
+`7182` 这个值表示的含义为:读取 tsensor 寄存器的值,并没有做任何数学运算。相应的数学表达式如下:
+
+```text
+
+code = ts_val & 0xfff;
+temp = (1e-10 * pow(code, 4) * 1.01472 - 1e-6 * pow(code, 3) * 1.10063 + 4.36150 * 1e-3 * pow(code, 2) - 7.10128 * code + 3565.87);
+
+```
+
+- ts_val:实际读取 TS 寄存器的值;
+- code:TS 寄存器的值保留低12位得到的结果;
+- temp:计算得到的温度值。
+
+#### 2.7.2 用户态访问 TS
+
+编写一个用户态应用程序,用户态应用程序通过标准的系统调用open()、close()、read()等函数陷入到内核态,最终会调用 TS 驱动中注册的接口中,以测试 TS 功能。
+
+目前用户态应用程序已经编写完成,生成的可执行文件在 `/usr/bin/ts_test_demo` 目录下。
+
+运行步骤如下:
+
+1. 进入应用程序 demo 目录;
+1. 在 demo 目录下运行 ts demo,循环次数作为参数;
+1. 执行 ts demo。
+1. 改变循环次数,重新执行 ts demo。
+
+启动小核Linux之后,运行下列命令:
+
+```shell
+[root@canaan ~ ]#cd /usr/bin/
+[root@canaan /usr/bin ]#./ts_test_demo 5
+ts_val: 0x1c08, TS = 42.176993 C
+ts_val: 0x1c07, TS = 41.875168 C
+ts_val: 0x1c06, TS = 41.573277 C
+ts_val: 0x1c07, TS = 41.875168 C
+ts_val: 0x1c0a, TS = 42.780447 C
+[root@canaan ~ ]#
+
+```
+
+### 2.8 TRNG API 参考
+
+用户可通过 `sysfs` 来访问 TRNG 硬件,还可以通过运行用户态程序读取真随机数。
+
+#### 2.8.1 sysfs 文件系统
+
+Linux 内核使用 `sysfs` 文件系统,它的作用是将设备和驱动程序的信息导出到用户空间,方便了用户读取设备信息,同时支持修改和调整。`sysfs` 虚拟文件系统一般被挂载在 `/sys` 目录下。TRNG 一旦被注册到 Linux 中的 HW random 框架中之后,通过 `sysfs` 虚拟文件系统,可以很容易查看到 TRNG 的信息。
+
+TRNG sysfs位于 `/sys/class/misc/hw_random/` 目录下,文件结构如下:
+
+```shell
+.
+|-- dev
+|-- rng_available
+|-- rng_current
+|-- rng_selected
+|-- subsystem -> ../../../../class/misc
+|-- uevent
+
+```
+
+启动 Linux 之后,运行下列命令:
+
+```shell
+[root@canaan ~ ]# cat /sys/class/misc/hw_random/rng_current
+91213000.trng
+[root@canaan ~ ]# cat /sys/class/misc/hw_random/rng_available
+91213000.trng
+
+```
+
+#### 2.8.2 用户态访问 TRNG
+
+编写一个用户态应用程序,用户态应用程序通过标准的系统调用open()、close()、read()等函数陷入到内核态,最终会调用 TRNG 驱动中注册的接口中,查看每次读取得到的数据是否不一致,从而测试 TRNG 的功能。
+
+目前用户态应用程序已经编写完成,生成的可执行文件在 */usr/bin/trng_test_demo* 目录下。
+
+运行步骤如下:
+
+1. 进入应用程序 demo 目录;
+1. 在 demo 目录下运行 trng demo;
+1. 执行 trng demo。
+1. 重复执行 trng demo,查看每次读取的随机数是否一致。
+
+启动小核Linux之后,运行下列命令:
+
+```text
+[root@canaan ~ ]#cd /usr/bin/
+[root@canaan /usr/bin ]#./trng_test_demo
+2C 10 B3 29 C3 98 10 41 3C 2A 90 75 EB C4 61 A5
+[root@canaan /usr/bin ]#./trng_test_demo
+6E AB 46 DD C1 7D FC 97 65 02 0C 58 1E A1 80 B9
+[root@canaan ~ ]#
+
+```
+
+默认每次打印16个字节的随机数,每次打印的随机数不同。
+
+### 2.9 open
+
+【描述】
+
+打开设备节点。
+
+【语法】
+
+`int open(const char *pathname, int flags)`
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+| ------- | ---------------- | --------- |
+| patchname | 全路径设备名 | 输入 |
+| flags | 打开方式 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+| ------ | -------------------- |
+| 负值 | 错误 |
+| 正值 | 打开的文件描述符id |
+
+【需求】
+
+- 头文件:`sys/types.h`, `sys/stat.h`, `fcntl.h`
+
+【注意】
+
+无
+
+【举例】
+
+`int fd = open("/dev/i2c-0", O_RDWR);`
+
+### 2.10 ioctl
+
+【描述】
+
+设备控制。
+
+【语法】
+
+`int ioctl(int fd, unsigned long request, ...);`
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+| ------- | ---------------- | --------- |
+| fd | 打开的文件描述符 | 输入 |
+| request | 32位命令码 | -- |
+
+命令码请参考`include/uapi/asm-generic/ioctl.h`
+
+【返回值】
+
+| 返回值 | 描述 |
+| ------ | -------------------- |
+| 负值 | 错误 |
+| 非负值 | 成功 |
+
+【需求】
+
+- 头文件:`sys/ioctl.h`
+
+【注意】
+
+无
+
+【举例】
+
+`err = ioctl(file, I2C_SMBUS, &args);`
+
+### 2.11 read
+
+【描述】
+
+读取打开的文件描述符内容。
+
+【语法】
+
+`ssize_t read(int fd, void *buf, size_t count);`
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+| ------- | ---------------- | --------- |
+| fd | 打开的文件描述符 | 输入 |
+| buf | 存放输出数据的空间 | 输出 |
+
+【返回值】
+
+| 返回值 | 描述 |
+| ------ | -------------------- |
+| -1 | 错误 |
+| 非负值 | 读取到的字节数 |
+
+【需求】
+
+- 头文件:`unistd.h`
+
+【注意】
+
+无
+
+【举例】
+
+`int n = read(fd, &buf, num);`
+
+### 2.12 write
+
+【描述】
+
+向打开的文件描述符写数据。
+
+【语法】
+
+`ssize_t write(int fd, const void *buf, size_t count);`
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+| ------- | ---------------- | --------- |
+| fd | 打开的文件描述符 | 输入 |
+| buf | 存放数据的空间 | 输出 |
+| count | 需要写入的长度 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+| ------ | -------------------- |
+| -1 | 错误 |
+| 0 | 未写入 |
+| 正值 | 写入的字节数 |
+
+【需求】
+
+- 头文件:`unistd.h`
+
+【注意】
+
+无
+
+【举例】
+
+`int n = write(fd, &buf, num);`
diff --git a/zh/01_software/board/osdrv/images/4c13711677925f891f88c5f3451b1630.png b/zh/01_software/board/osdrv/images/4c13711677925f891f88c5f3451b1630.png
new file mode 100644
index 0000000..755cdbd
Binary files /dev/null and b/zh/01_software/board/osdrv/images/4c13711677925f891f88c5f3451b1630.png differ
diff --git a/zh/01_software/board/osdrv/images/56a2648fb35340c3f3ab275da91b1247.png b/zh/01_software/board/osdrv/images/56a2648fb35340c3f3ab275da91b1247.png
new file mode 100644
index 0000000..10c8564
Binary files /dev/null and b/zh/01_software/board/osdrv/images/56a2648fb35340c3f3ab275da91b1247.png differ
diff --git a/zh/01_software/board/osdrv/images/78ce42062b1b3c4eea2724d722f587f5.png b/zh/01_software/board/osdrv/images/78ce42062b1b3c4eea2724d722f587f5.png
new file mode 100644
index 0000000..d851698
Binary files /dev/null and b/zh/01_software/board/osdrv/images/78ce42062b1b3c4eea2724d722f587f5.png differ
diff --git a/zh/01_software/board/osdrv/images/899387ab5aa9eecd9d5ffa35982da43f.png b/zh/01_software/board/osdrv/images/899387ab5aa9eecd9d5ffa35982da43f.png
new file mode 100644
index 0000000..309a1d6
Binary files /dev/null and b/zh/01_software/board/osdrv/images/899387ab5aa9eecd9d5ffa35982da43f.png differ
diff --git a/zh/01_software/board/osdrv/images/8dab3c90fd04037c474ffe4dcb6ebcad.png b/zh/01_software/board/osdrv/images/8dab3c90fd04037c474ffe4dcb6ebcad.png
new file mode 100644
index 0000000..d09b6f6
Binary files /dev/null and b/zh/01_software/board/osdrv/images/8dab3c90fd04037c474ffe4dcb6ebcad.png differ
diff --git a/zh/01_software/board/osdrv/images/907ec0b9b9b7bafdd715a7e6a293fe33.jpeg b/zh/01_software/board/osdrv/images/907ec0b9b9b7bafdd715a7e6a293fe33.jpeg
new file mode 100644
index 0000000..908d1db
Binary files /dev/null and b/zh/01_software/board/osdrv/images/907ec0b9b9b7bafdd715a7e6a293fe33.jpeg differ
diff --git a/zh/01_software/board/osdrv/images/9c1b166e281b6ae4532a24e3fb4ab544.png b/zh/01_software/board/osdrv/images/9c1b166e281b6ae4532a24e3fb4ab544.png
new file mode 100644
index 0000000..bd7d121
Binary files /dev/null and b/zh/01_software/board/osdrv/images/9c1b166e281b6ae4532a24e3fb4ab544.png differ
diff --git a/zh/01_software/board/osdrv/images/a8681956288af97fa64d83522360b540.png b/zh/01_software/board/osdrv/images/a8681956288af97fa64d83522360b540.png
new file mode 100644
index 0000000..c596b8b
Binary files /dev/null and b/zh/01_software/board/osdrv/images/a8681956288af97fa64d83522360b540.png differ
diff --git a/zh/01_software/board/osdrv/images/befd53872f5678c01b6a9680165bf4f0.png b/zh/01_software/board/osdrv/images/befd53872f5678c01b6a9680165bf4f0.png
new file mode 100644
index 0000000..af09383
Binary files /dev/null and b/zh/01_software/board/osdrv/images/befd53872f5678c01b6a9680165bf4f0.png differ
diff --git a/zh/01_software/board/osdrv/images/c243ed2abdfa36f6d918274132ae3bff.png b/zh/01_software/board/osdrv/images/c243ed2abdfa36f6d918274132ae3bff.png
new file mode 100644
index 0000000..3683b18
Binary files /dev/null and b/zh/01_software/board/osdrv/images/c243ed2abdfa36f6d918274132ae3bff.png differ
diff --git a/zh/01_software/board/osdrv/images/canaan-cover.png b/zh/01_software/board/osdrv/images/canaan-cover.png
new file mode 100644
index 0000000..0319765
Binary files /dev/null and b/zh/01_software/board/osdrv/images/canaan-cover.png differ
diff --git a/zh/01_software/board/osdrv/images/d57457f620fd3083c6a6da9f4da78a1e.png b/zh/01_software/board/osdrv/images/d57457f620fd3083c6a6da9f4da78a1e.png
new file mode 100644
index 0000000..c7a2ad4
Binary files /dev/null and b/zh/01_software/board/osdrv/images/d57457f620fd3083c6a6da9f4da78a1e.png differ
diff --git a/zh/01_software/board/osdrv/images/da2c89ea92bffca6b1dd4d9b09efd855.png b/zh/01_software/board/osdrv/images/da2c89ea92bffca6b1dd4d9b09efd855.png
new file mode 100644
index 0000000..5d5c5a2
Binary files /dev/null and b/zh/01_software/board/osdrv/images/da2c89ea92bffca6b1dd4d9b09efd855.png differ
diff --git a/zh/01_software/board/osdrv/images/e19ef72c437edd32f4e48ce8e8eb6552.png b/zh/01_software/board/osdrv/images/e19ef72c437edd32f4e48ce8e8eb6552.png
new file mode 100644
index 0000000..c28b789
Binary files /dev/null and b/zh/01_software/board/osdrv/images/e19ef72c437edd32f4e48ce8e8eb6552.png differ
diff --git a/zh/01_software/board/osdrv/images/e20100e34c268ad615e69966cb28e5a6.png b/zh/01_software/board/osdrv/images/e20100e34c268ad615e69966cb28e5a6.png
new file mode 100644
index 0000000..3273784
Binary files /dev/null and b/zh/01_software/board/osdrv/images/e20100e34c268ad615e69966cb28e5a6.png differ
diff --git a/zh/01_software/board/osdrv/images/f09a29152cf3ccca9d2e2602a62f6d64.png b/zh/01_software/board/osdrv/images/f09a29152cf3ccca9d2e2602a62f6d64.png
new file mode 100644
index 0000000..49e0c95
Binary files /dev/null and b/zh/01_software/board/osdrv/images/f09a29152cf3ccca9d2e2602a62f6d64.png differ
diff --git a/zh/01_software/board/osdrv/images/fd9ce5570d02a5a3248c036db4bf4ca2.png b/zh/01_software/board/osdrv/images/fd9ce5570d02a5a3248c036db4bf4ca2.png
new file mode 100644
index 0000000..41a0eb5
Binary files /dev/null and b/zh/01_software/board/osdrv/images/fd9ce5570d02a5a3248c036db4bf4ca2.png differ
diff --git a/zh/01_software/board/osdrv/images/logo.png b/zh/01_software/board/osdrv/images/logo.png
new file mode 100644
index 0000000..aa48558
Binary files /dev/null and b/zh/01_software/board/osdrv/images/logo.png differ
diff --git a/zh/01_software/board/osdrv/images/modetest_osd_ar24_tiles.png b/zh/01_software/board/osdrv/images/modetest_osd_ar24_tiles.png
new file mode 100644
index 0000000..1e73114
Binary files /dev/null and b/zh/01_software/board/osdrv/images/modetest_osd_ar24_tiles.png differ
diff --git a/zh/01_software/board/osdrv/images/modetest_osd_rg16_tiles.png b/zh/01_software/board/osdrv/images/modetest_osd_rg16_tiles.png
new file mode 100644
index 0000000..350f4d0
Binary files /dev/null and b/zh/01_software/board/osdrv/images/modetest_osd_rg16_tiles.png differ
diff --git a/zh/01_software/board/osdrv/images/modetest_video_nv12_smpte.png b/zh/01_software/board/osdrv/images/modetest_video_nv12_smpte.png
new file mode 100644
index 0000000..882052a
Binary files /dev/null and b/zh/01_software/board/osdrv/images/modetest_video_nv12_smpte.png differ
diff --git a/zh/01_software/board/osdrv/images/otp_linux.png b/zh/01_software/board/osdrv/images/otp_linux.png
new file mode 100755
index 0000000..dfe753a
Binary files /dev/null and b/zh/01_software/board/osdrv/images/otp_linux.png differ
diff --git a/zh/01_software/board/osdrv/images/otp_rtt.png b/zh/01_software/board/osdrv/images/otp_rtt.png
new file mode 100755
index 0000000..637470a
Binary files /dev/null and b/zh/01_software/board/osdrv/images/otp_rtt.png differ
diff --git a/zh/01_software/board/osdrv/images/pmu_hw_bottom_view.jpg b/zh/01_software/board/osdrv/images/pmu_hw_bottom_view.jpg
new file mode 100644
index 0000000..41df74d
Binary files /dev/null and b/zh/01_software/board/osdrv/images/pmu_hw_bottom_view.jpg differ
diff --git a/zh/01_software/board/osdrv/images/pmu_hw_top_view.jpg b/zh/01_software/board/osdrv/images/pmu_hw_top_view.jpg
new file mode 100644
index 0000000..514fd24
Binary files /dev/null and b/zh/01_software/board/osdrv/images/pmu_hw_top_view.jpg differ
diff --git a/zh/01_software/board/osdrv/images/pwm-driver.png b/zh/01_software/board/osdrv/images/pwm-driver.png
new file mode 100755
index 0000000..0f7ae5e
Binary files /dev/null and b/zh/01_software/board/osdrv/images/pwm-driver.png differ
diff --git a/zh/01_software/board/osdrv/images/rtc-driver.png b/zh/01_software/board/osdrv/images/rtc-driver.png
new file mode 100755
index 0000000..e0527e6
Binary files /dev/null and b/zh/01_software/board/osdrv/images/rtc-driver.png differ
diff --git a/zh/01_software/board/osdrv/images/timer-driver.png b/zh/01_software/board/osdrv/images/timer-driver.png
new file mode 100755
index 0000000..ff324d5
Binary files /dev/null and b/zh/01_software/board/osdrv/images/timer-driver.png differ
diff --git a/zh/01_software/board/osdrv/images/trng_linux.png b/zh/01_software/board/osdrv/images/trng_linux.png
new file mode 100755
index 0000000..5e4f851
Binary files /dev/null and b/zh/01_software/board/osdrv/images/trng_linux.png differ
diff --git a/zh/01_software/board/osdrv/images/ts_linux.png b/zh/01_software/board/osdrv/images/ts_linux.png
new file mode 100755
index 0000000..8924592
Binary files /dev/null and b/zh/01_software/board/osdrv/images/ts_linux.png differ
diff --git a/zh/01_software/board/osdrv/images/ts_rtt.png b/zh/01_software/board/osdrv/images/ts_rtt.png
new file mode 100755
index 0000000..ba53e44
Binary files /dev/null and b/zh/01_software/board/osdrv/images/ts_rtt.png differ
diff --git a/zh/01_software/board/osdrv/images/wdt_driver_model.png b/zh/01_software/board/osdrv/images/wdt_driver_model.png
new file mode 100644
index 0000000..fb14dc7
Binary files /dev/null and b/zh/01_software/board/osdrv/images/wdt_driver_model.png differ
diff --git "a/zh/01_software/pc/dewarp/K230_SDK_Dewarp\344\275\277\347\224\250\346\214\207\345\215\227.md" "b/zh/01_software/pc/dewarp/K230_SDK_Dewarp\344\275\277\347\224\250\346\214\207\345\215\227.md"
new file mode 100644
index 0000000..fa13004
--- /dev/null
+++ "b/zh/01_software/pc/dewarp/K230_SDK_Dewarp\344\275\277\347\224\250\346\214\207\345\215\227.md"
@@ -0,0 +1,92 @@
+# K230 SDK Dewarp 使用指南
+
+
+
+版权所有©2023北京嘉楠捷思信息技术有限公司
+
+
+
+## 免责声明
+
+您购买的产品、服务或特性等应受北京嘉楠捷思信息技术有限公司(“本公司”,下同)及其关联公司的商业合同和条款的约束,本文档中描述的全部或部分产品、服务或特性可能不在您的购买或使用范围之内。除非合同另有约定,本公司不对本文档的任何陈述、信息、内容的正确性、可靠性、完整性、适销性、符合特定目的和不侵权提供任何明示或默示的声明或保证。除非另有约定,本文档仅作为使用指导参考。
+
+由于产品版本升级或其他原因,本文档内容将可能在未经任何通知的情况下,不定期进行更新或修改。
+
+## 商标声明
+
+、“嘉楠”和其他嘉楠商标均为北京嘉楠捷思信息技术有限公司及其关联公司的商标。本文档可能提及的其他所有商标或注册商标,由各自的所有人拥有。
+
+**版权所有 © 2023北京嘉楠捷思信息技术有限公司。保留一切权利。**
+非经本公司书面许可,任何单位和个人不得擅自摘抄、复制本文档内容的部分或全部,并不得以任何形式传播。
+
+
+
+## 目录
+
+[TOC]
+
+## 前言
+
+### 概述
+
+本文档主要介绍K230 VICAP 模块中Dewarp标定及使用方法。
+
+### 读者对象
+
+本文档(本指南)主要适用于以下人员:
+
+- 技术支持工程师
+- 软件开发工程师
+
+### 缩略词定义
+
+| 简称 | 说明 |
+| ---- | ---- |
+| DW | Dewarp |
+
+### 修订记录
+
+| 文档版本号 | 修改说明 | 修改者 | 日期 |
+| ---------- | -------- | ---------- | ---------- |
+| V1.0 | 初版 | 刘家安、黄子懿 | 2023-06-08 |
+
+## 1. Dewarp 标定介绍
+
+Dewarp 标定过程产生一个包含相机矩阵和畸变系数的 YAML 文件,K230 SDK 在构建时会通过这个 YAML 文件来生成 remap 文件,并放入大核根文件系统的 `/bin` 目录下,在配置 VICAP 时将 `k_vicap_dev_attr` 结构体的 `dw_enable` 设为1来启用 Dewarp,VICAP 会在当前路径下查找 `-x.bin` (例如对于 IMX335 全分辨率,即为 `imx335-2592x1944.bin`)文件作为 Dewarp 配置文件进行畸变矫正。
+
+### 1.1 抓取图像
+
+1. 在同一平面上旋转棋盘并拍摄至少 20 张图片
+1. 选择涵盖所有角度至少10张照片保存到一个固定目录,推荐选择差异较大的图片
+
+
+
+可以使用 sample_vicap.elf 这个程序进行抓取,将保存的YUV文件通过ffmpeg转换为 png/bmp 等易于OpenCV读取的图像格式,参考如下命令
+
+```shell
+ffmpeg -f rawvideo -pixel_format nv12 -video_size 2592x1944 -i dev_00_chn_00_2592x1944_0000.yuv420sp 0.png
+```
+
+### 1.2 执行标定程序
+
+创建包含图片路径的xml文件,例如 `imx335-2592x1944-0.xml`,填入上一步保存的图片路径,形如
+
+```xml
+
+
+
+images/imx335-2592x1944-0/0.png
+...
+
+
+```
+
+编辑 `run.bat`,将最后一个参数改为刚才创建的 XML 文件路径,将 -o 参数改为保存输出的 YAML 文件路径,然后执行 `run.bat`
+
+## 2. Dewarp 与 VICAP 模块配合使用
+
+注意:**打开Dewarp需要一个额外的vb pool,并将设备属性的 buf_size改为sensor输出buffer大小,可以参考 `sample_vicap.c` 中 `sample_vicap_vb_init` 函数的做法来初始化vb pool。**
+
+在上一步中生成的 YAML 文件需要放入 `/src/big/mpp/userapps/src/sensor/dewarp` 目录下,编译 K230 SDK。
+
+如果之前已经编译过 K230 SDK,那么可以不用完整重新编译,放置好 YAML 文件后直接运行 `make mpp-apps` 即可,如果需要制作镜像则还需要运行 `make build-image`
diff --git a/zh/01_software/pc/dewarp/images/calibration.png b/zh/01_software/pc/dewarp/images/calibration.png
new file mode 100755
index 0000000..d9092df
Binary files /dev/null and b/zh/01_software/pc/dewarp/images/calibration.png differ
diff --git a/zh/01_software/pc/dewarp/images/canaan-cover.png b/zh/01_software/pc/dewarp/images/canaan-cover.png
new file mode 120000
index 0000000..f05561a
--- /dev/null
+++ b/zh/01_software/pc/dewarp/images/canaan-cover.png
@@ -0,0 +1 @@
+../../../../template/images/canaan-cover.png
\ No newline at end of file
diff --git a/zh/01_software/pc/dewarp/images/canaan-lable.png b/zh/01_software/pc/dewarp/images/canaan-lable.png
new file mode 120000
index 0000000..b49cdc1
--- /dev/null
+++ b/zh/01_software/pc/dewarp/images/canaan-lable.png
@@ -0,0 +1 @@
+../../../../template/images/canaan-lable.png
\ No newline at end of file
diff --git "a/zh/01_software/pc/pqtools/K230_SDK_Tuning_Tool\344\275\277\347\224\250\346\214\207\345\215\227.md" "b/zh/01_software/pc/pqtools/K230_SDK_Tuning_Tool\344\275\277\347\224\250\346\214\207\345\215\227.md"
new file mode 100644
index 0000000..fdcc91c
--- /dev/null
+++ "b/zh/01_software/pc/pqtools/K230_SDK_Tuning_Tool\344\275\277\347\224\250\346\214\207\345\215\227.md"
@@ -0,0 +1,360 @@
+# K230 SDK Tuning Tool使用指南
+
+
+
+版权所有©2023北京嘉楠捷思信息技术有限公司
+
+
+
+## 免责声明
+
+您购买的产品、服务或特性等应受北京嘉楠捷思信息技术有限公司(“本公司”,下同)及其关联公司的商业合同和条款的约束,本文档中描述的全部或部分产品、服务或特性可能不在您的购买或使用范围之内。除非合同另有约定,本公司不对本文档的任何陈述、信息、内容的正确性、可靠性、完整性、适销性、符合特定目的和不侵权提供任何明示或默示的声明或保证。除非另有约定,本文档仅作为使用指导参考。
+
+由于产品版本升级或其他原因,本文档内容将可能在未经任何通知的情况下,不定期进行更新或修改。
+
+## 商标声明
+
+、“嘉楠”和其他嘉楠商标均为北京嘉楠捷思信息技术有限公司及其关联公司的商标。本文档可能提及的其他所有商标或注册商标,由各自的所有人拥有。
+
+**版权所有 © 2023北京嘉楠捷思信息技术有限公司。保留一切权利。**
+非经本公司书面许可,任何单位和个人不得擅自摘抄、复制本文档内容的部分或全部,并不得以任何形式传播。
+
+
+
+## 目录
+
+[TOC]
+
+## 前言
+
+### 概述
+
+本文档描述了Tuning Tool的使用说明。
+
+### 读者对象
+
+本文档(本指南)主要适用于以下人员:
+
+- 技术支持工程师
+- 软件开发工程师
+
+### 缩略词定义
+
+| 简称 | 说明 |
+|------|------------------------------------------------------------|
+| BLS | Black Level Subtraction |
+| HDR | High Dynamic Range |
+| 3A | AE(Auto Exposure)、AF(Auto Focus)、AWB(Auto White Balance) |
+| DG | Digital Gain |
+| LSC | Lens Shading Correction |
+| WB | White Balance |
+| DM | Demosaic |
+| DPCC | Defect Pixel Cluster Correction |
+| DPF | Denoising Prefilter |
+| CNR | Color Noise Reduction |
+| CAC | Chromatic Aberration Correction |
+| CA | Color Adjustment |
+| 2DNR | 2D Noise Reduction |
+| 3DNR | 3D Noise Reduction |
+| GC | Gamma Correction |
+| GE | Green Equilibrate |
+| EE | Edge Enhance |
+| CP | Color Processing |
+| ROI | Region Of Interested |
+| DW | De-warp |
+| TS | Tuning-Server |
+| TC | Tuning-Client |
+
+### 修订记录
+
+| 文档版本号 | 修改说明 | 修改者 | 日期 |
+|------------|-----------------------------------|--------|------------|
+| V1.0 | 初版 | 郭世栋 | 2023-02-20 |
+| V1.1 | 更新部分功能描述 | 刘家安 | 2023-04-07 |
+| V1.2 | 更新部分功能描述 新增部分功能描述 | 郭世栋 | 2023-05-05 |
+
+## 1. 模块软件架构
+
+
+
+图1-1
+
+## 2. Tuning Tool的连接及启用
+
+### 2.1 工具获取路径
+
+| **文件名** | **存放位置** | **功能** |
+|-------------------------------------------|--------------------------------------------------------------------------------------------------------------|-----------------------------------------------------|
+| PC tuning-tool软件包(tuning-client.exe) | relaese的源码包k230_sdk/tools/tuning-tool-client/Kendyte_ISP_Tool_TuningClient_RC22.5_Pre_596062-20221116.7z | 用于图像dump,ISP调试等PC端工具 |
+| tsconfig.json | 小核文件系统 /app/tuning-server/ | DUMP数据用配置文件 |
+| run_tuning_server.sh | 小核文件系统 /app/tuning-server/ | 启动tuning-server脚本 |
+| 3aconfig.json | 小核文件系统 /app/tuning-server/ | 3a模块的配置参数 |
+| tuning-server | 小核文件系统 /app/tuning-server/ | tuning-server可执行程序,被run_tuning_server.sh调用 |
+| sample_sys_init.elf | 大核/bin/ | ISP demo(包含少部分ISP功能,已经不再使用) |
+| sample_vicap_dump.elf | 大核/bin/ | 基于VICAP的ISP demo(包括基本ISP pipeline) |
+**表2-1 文件列表**
+
+### 2.2 环境编译
+
+Tuning-tool依赖板端小核系统的tuning-server程序通信,依赖板端大核系统的ISP demo,demo由sample_sys_init.elf替换为sample_vicap_dump.elf,包含基本ISP pipeline功能。
+
+根据release源码包中的README.md编译出镜像,烧写至板端。Tuning-server相关组件以及应用程序将存放在小核/app/tuning-server和/lib/tuning-server中。
+
+### 2.3 启动流程
+
+1. 板端小核配置IP
+1. 板端小核插入k_ipcm.ko模块,cd /mnt; insmod k_ipcm.ko
+1. 板端小核启动tuning-server
+1. 板端大核启动ISP demo,cd /bin/; ./sample_vicap_dump.elf -dev \ -sensor \ -chn \ -ofmt \ -preview \
+1. PC端启动tuning-tool-client
+
+### 2.4 修改配置文件
+
+#### 2.4.1 小核
+
+1. tsconfig.json
+
+用于配置DUMP功能的图像数据参数,默认基于ov9732(目前仅支持ov9732)。
+修改“convert_to_Bmp”为1时,将dump的数据保存BMP并发送到PC指定保存目录,此时预览窗口将显示BMP。
+修改“convert_to_Bmp”为0时,将dump的原始数据(yuvNV12)保存并发送到PC指定保存目录,此时预览窗口将无法显示。
+
+| **关键字** | **默认值** | **功能** |
+|----------------|---------------------------|--------------------------------------------------------------------------------------------------------------------------|
+| Width | 1280 | DUMP图像的宽 |
+| Height | 720 | DUMP图像的高 |
+| Align | 1 | 对齐字节数 |
+| stride | 1280 | 对齐后的数据宽度 |
+| pixel_format | 27 | DUMP图像格式,27/30: YUV NV12 |
+| insert_pic | 0 | 插帧测试,0:关闭,1:开启,默认关闭 |
+| convert_to_Bmp | 1 | DUMP后的图像转换为BMP,默认开启,将在tuning-tool中显示转换后的BMP,关闭后将不进行转换,tuning-tool显示窗口将无法显示图像 |
+| bayer_pattern | 1 | 0: BGGR,1: RGGB,默认RGGB,暂时不生效 |
+| insertFilename | NON | 插帧测试文件全路径: 默认为空即可 |
+| save_path | /app/tuning-server/mount/ | DUMP数据在板端的存储路径,板端无mount目录,需自行创建 |
+| dev_num | 0 | 设备ID编号,默认0,0:sensor0, 1:sensor1 |
+| chn_num | 0 | 绑定通道编号,默认0 |
+| exp_type | 0 | sensor曝光模式,当前不生效,默认为0 |
+**表2-2 配置参数说明**
+
+1. run_tuning_server.sh,用于启动tuning-server,直接按照步骤3)执行即可。
+1. 启动tuning-server,cd /app/tuning-server; ./run_tuning_server.sh
+
+#### 2.4.2 大核
+
+1. RT-Smart启动ISP-demo
+
+> cd /bin/; ./sample_vicap_dump.elf
+ISP-demo启动方法
+./sample_vicap_dump.elf -dev \ -sensor \ -chn \ -ofmt \ -preview \
+./sample_vicap_dump.elf -dev 0 -sensor 0 -chn 0
+./sample_vicap_dump.elf -dev 0 -sensor 2 -chn 0
+通过指定sensor num决定使用哪个sensor配置,preview开关决定是否进行预览
+
+#### 2.4.3 PC tuning tool
+
+1. 启动tuning-tool
+
+打开release的tuning-tool工具包中的tuning-client.exe。路径为:k230_sdk/tools/tuning-tool-client/Kendyte_ISP_Tool_TuningClient_RC22.5_Pre_596062-20221116.7z
+参照章节3.1配置IP即可。
+
+## 3. Tuning Tool界面介绍
+
+
+
+图3-1
+
+如图3-1所示为tuning-tool-client的基本操作UI全部展开后共五个区域
+
+① 菜单操作区域:用于ISP的选择、参数导入/导出、通信连接配置
+
+② 图像操作区域:抓取图像
+
+③ 功能区域:用于ISP各模块UI的切换
+
+④ 调试区域:用于调试某一个模块的参数
+
+⑤ 回显区域:用于打印部分参数下发和接收的日志
+
+### 3.1 连接板端tuning-server
+
+#### 3.1.1 使用HTTP方式连接板端tuning-server
+
+
+图3-2
+
+SDK默认支持HTTP方式连接,依次点击Edit-\>Preferences-\>Server Settings将弹出配置窗口,如图3-2,图3-3。
+
+
+图3-3
+
+选择HTTP模式,保证PC与板端连接的网络处于同一网段,在Server的第一项指定板端的IP,第二项指定端口默认即可,依次点击add-\>apply后关闭窗口即可完成配置,如果板端tuning-server已经启动,则会自动完成连接,任意切换图3-1中③区域的模块,则会看到tuning-server端的函数打印。
+
+### 3.2 在线调试界面及功能描述
+
+本节只是简单介绍一些tuning tool界面上调试模块的主要功能,具体的调试策略及步骤将在以后的图像调优文档中进行详细的描述。
+
+#### 3.2.1 Input Control
+
+Sensor Driver:选择sensor的驱动配置.drv
+
+Resolution:sensor配置出图的resolution
+
+Enable Test Pattern:是否打开sensor test pattern
+
+Connection Status:查看连接状态
+
+Bayer Pattern: bayer排序
+
+#### 3.2.2 Register
+
+支持用户对ISP的寄存器进行读写。
+
+支持对sensor寄存器的读写,目前默认对sensor0进行读写,若读写sensor1,需要配置tsconfig.json中dev_num参数为1即可。
+
+#### 3.2.3 3A Config
+
+目前未使用,已分解到其他地方。
+
+#### 3.2.4 Calibration Data
+
+将标定工具生成的xml文件导入并显示在界面上。
+
+#### 3.2.5 High Dynamic Range 2
+
+暂未支持。
+
+#### 3.2.6 Exposure Control
+
+支持获取自动曝光和增益,支持通过工具界面设置曝光和增益,设置时需要关闭自动曝光功能。
+
+#### 3.2.7 Digital Gain
+
+用于对ISP Digital Gain使能控制及调节大小。
+
+#### 3.2.8 Black Level Subtraction
+
+提供与Sensor相关的黑电平校正,可对R、Gr、Gb、B四通道进行设置。
+
+#### 3.2.9 Lens Shading Correction
+
+提供镜头阴影校正,校准系数由标定工具生成。
+
+#### 3.2.10 White Balance
+
+提供白平衡R、Gr、Gb、B四通道增益设置;
+
+通过调节3x3 CCM矩阵及偏移量可完成颜色偏差的校准。
+
+#### 3.2.11 Wide Dynamic Range 4
+
+提供对图像全局和局部对比度的调整。
+
+#### 3.2.12 Defect Pixel Cluster Correction
+
+提供对像素坏点的检测及校准的功能,通过选择set可设置不同的校准方法。
+
+#### 3.2.13 Denoising Prefilter
+
+双边滤波降噪模块。
+
+#### 3.2.14 Demosaicing 2
+
+通过插值将Bayer格式的Raw图转为RGB图,并提供去摩尔纹、去紫边、锐化及降噪处理功能。
+
+#### 3.2.15 Color Noise Reduction
+
+未支持。
+
+#### 3.2.16 Chromatic Aberration Correction
+
+用于校准主要由镜头引入的色差,由标定工具生成校准参数。
+
+#### 3.2.17 Color Adjustment
+
+分为CA和DCI两块。
+
+CA模块用于调节图像的饱和度。根据图像亮度或者原饱和度的变化来调整饱和度,达到局部调整饱和度的目的,让亮区域的颜色更鲜艳以及消除暗区域或低饱和度区域的彩噪。
+
+DCI模块实现对图像的动态对比度调整。
+
+#### 3.2.18 3D Noise Reduction 3
+
+通过调整参数配置,对图像降噪强度的调节。
+
+#### 3.2.19 Gamma Correction 2
+
+支持客户自定义gamma,该模式下可更改gamma指数。
+
+#### 3.2.20 Green Equilibrate
+
+校准Gr与Gb两通道的不平衡,可设置不同的绿平衡强度。
+
+#### 3.2.21 Edge Enhance
+
+用于提升图像的清晰度。通过设置合适的参数,提升图像清晰度的同时,也可抑制噪声的增强。
+
+#### 3.2.22 Color Processing
+
+颜色处理模块,可调节图像的对比度、亮度、饱和度及色调,设置不同的颜色喜好或风格。
+
+#### 3.2.23 Rgbir
+
+暂未支持。
+
+#### 3.2.24 Auto Exposure 2
+
+工具界面暂不支持调节自动参数。
+
+#### 3.2.25 Region Of Interested
+
+支持通过工具设置8个ROI窗口,第一次设置窗口数量超过1后,将不能再关闭ROI模式,ROI数量最少1个。开启ROI模式需要,需要在Auto Exposure2模块Scene Evaluation Mode中选择FIX模式并enable AE才能开启ROI模式。
+
+#### 3.2.26 Auto Focus
+
+因涉及到自动功能,暂未支持。
+
+#### 3.2.27 Auto White Balance
+
+因涉及到自动功能,暂未支持。
+
+#### 3.2.28 Dewarp
+
+已经移到单独的Dewarp tool里。
+
+### 3.3 抓取图片
+
+#### 3.3.1 选择保存目录
+
+
+图3-4
+
+点击菜单-\>Edit-\>preferences,弹窗如图3-4,点击Capture Settings,点击Browser按钮,选择保存数据的路径,关闭窗口即可。
+
+#### 3.3.2 采集图像
+
+当前仅支持dump 8bit yuvNV12格式数据,点击,等待预览窗口弹出,即可将转换为BMP的图像传送至设置的保存路径中,并显示,原始yuv数据则存放在文件系统中。
+
+如果yuv和BMP数据都需要,可以考虑使用挂载盘或者tftp等功能将数据发出。如果使用挂载方式。在tsconfig.json中修改"save_path"值,默认"save_path": "/app/tuning-server/mount/",可以修改tuning-server dump数据时原始数据的存储路径,可将路径设置为挂载目录,直接会将yuv和BMP文件存储在该路径下。
+
+如果不需要BMP数据,仅使用yuv数据,则可以在tsconfig.json中设置"convert_to_Bmp": 0,关闭转换BMP功能,这样yuv数据将直接发送至PC,预览窗口将不再显示图像。
+
+板端存储空间有限,在dump一定帧数后将无法dump,需要手动清理数据后再执行该功能。
+
+tsconfig.json文件可直接修改,保存后执行sync命令,此时capture功能将更新,无需退出tuning-server后再修改。
+
+### 3.4 参数的导入与导出
+
+#### 3.4.1 参数导入
+
+工具默认支持导入的参数文件为标准xml格式,分为标定参数和tuning参数两部分,支持PC本地和远程(板端本地)导入。
+
+依次点击File-\>Import All Settings-\>Local/Remote即可在弹出的窗口中选择需要导入的参数xml文件,如图3-5所示。在tuning-tool-client中默认自带多种sensor的参考xml,可用于进行测试。也可在板端Linux文件系统中导入提前存放的xml文件。
+
+
+
+图3-5
+
+#### 3.4.2 参数导出
+
+工具默认导出方式会将标定参数和在线调试参数两部分汇总为一个xml文件存放。
+
+依次点击File-\>Export All Settings后,将在板端保存isp-yyyy-MM-dd_HH-mm-ss.xml文件,如:isp-2023-02-07_11-13-17.xml。
diff --git a/zh/01_software/pc/pqtools/images/28a799580bb5670cb8d29dc709a4dcc6.png b/zh/01_software/pc/pqtools/images/28a799580bb5670cb8d29dc709a4dcc6.png
new file mode 100644
index 0000000..48c05eb
Binary files /dev/null and b/zh/01_software/pc/pqtools/images/28a799580bb5670cb8d29dc709a4dcc6.png differ
diff --git a/zh/01_software/pc/pqtools/images/857dd7d1140476e6a225b78297b9b2fe.png b/zh/01_software/pc/pqtools/images/857dd7d1140476e6a225b78297b9b2fe.png
new file mode 100644
index 0000000..0400699
Binary files /dev/null and b/zh/01_software/pc/pqtools/images/857dd7d1140476e6a225b78297b9b2fe.png differ
diff --git a/zh/01_software/pc/pqtools/images/89e7206f4f032031939db08d5242a71e.png b/zh/01_software/pc/pqtools/images/89e7206f4f032031939db08d5242a71e.png
new file mode 100644
index 0000000..be279de
Binary files /dev/null and b/zh/01_software/pc/pqtools/images/89e7206f4f032031939db08d5242a71e.png differ
diff --git a/zh/01_software/pc/pqtools/images/c82b2bcd7ec8b6ad2d9af0c3778354b3.png b/zh/01_software/pc/pqtools/images/c82b2bcd7ec8b6ad2d9af0c3778354b3.png
new file mode 100644
index 0000000..0e35cb1
Binary files /dev/null and b/zh/01_software/pc/pqtools/images/c82b2bcd7ec8b6ad2d9af0c3778354b3.png differ
diff --git a/zh/01_software/pc/pqtools/images/canaan-cover.png b/zh/01_software/pc/pqtools/images/canaan-cover.png
new file mode 100644
index 0000000..0319765
Binary files /dev/null and b/zh/01_software/pc/pqtools/images/canaan-cover.png differ
diff --git a/zh/01_software/pc/pqtools/images/cc9d6c96f9050f3e754279087fba464f.png b/zh/01_software/pc/pqtools/images/cc9d6c96f9050f3e754279087fba464f.png
new file mode 100644
index 0000000..6ee396e
Binary files /dev/null and b/zh/01_software/pc/pqtools/images/cc9d6c96f9050f3e754279087fba464f.png differ
diff --git a/zh/01_software/pc/pqtools/images/cde5234f5012c9f0b08ecfa108470466.png b/zh/01_software/pc/pqtools/images/cde5234f5012c9f0b08ecfa108470466.png
new file mode 100644
index 0000000..96051d5
Binary files /dev/null and b/zh/01_software/pc/pqtools/images/cde5234f5012c9f0b08ecfa108470466.png differ
diff --git a/zh/01_software/pc/pqtools/images/ebd1d0f0d38884a6e0eb9d4b370e006d.png b/zh/01_software/pc/pqtools/images/ebd1d0f0d38884a6e0eb9d4b370e006d.png
new file mode 100644
index 0000000..0e1b91a
Binary files /dev/null and b/zh/01_software/pc/pqtools/images/ebd1d0f0d38884a6e0eb9d4b370e006d.png differ
diff --git a/zh/01_software/pc/pqtools/images/logo.png b/zh/01_software/pc/pqtools/images/logo.png
new file mode 100644
index 0000000..aa48558
Binary files /dev/null and b/zh/01_software/pc/pqtools/images/logo.png differ
diff --git a/zh/02_applications/ai_demos/.gitkeep b/zh/02_applications/ai_demos/.gitkeep
new file mode 100644
index 0000000..e69de29
diff --git "a/zh/02_applications/ai_demos/K230_AI_Demo\344\273\213\347\273\215.md" "b/zh/02_applications/ai_demos/K230_AI_Demo\344\273\213\347\273\215.md"
new file mode 100755
index 0000000..15e9d72
--- /dev/null
+++ "b/zh/02_applications/ai_demos/K230_AI_Demo\344\273\213\347\273\215.md"
@@ -0,0 +1,109 @@
+# K230 AI Demo介绍
+
+
+
+版权所有©2023北京嘉楠捷思信息技术有限公司
+
+
+
+## 免责声明
+
+您购买的产品、服务或特性等应受北京嘉楠捷思信息技术有限公司(“本公司”,下同)及其关联公司的商业合同和条款的约束,本文档中描述的全部或部分产品、服务或特性可能不在您的购买或使用范围之内。除非合同另有约定,本公司不对本文档的任何陈述、信息、内容的正确性、可靠性、完整性、适销性、符合特定目的和不侵权提供任何明示或默示的声明或保证。除非另有约定,本文档仅作为使用指导参考。
+
+由于产品版本升级或其他原因,本文档内容将可能在未经任何通知的情况下,不定期进行更新或修改。
+
+## 商标声明
+
+“嘉楠”和其他嘉楠商标均为北京嘉楠捷思信息技术有限公司及其关联公司的商标。本文档可能提及的其他所有商标或注册商标,由各自的所有人拥有。
+
+**版权所有 © 2023北京嘉楠捷思信息技术有限公司。保留一切权利。**
+非经本公司书面许可,任何单位和个人不得擅自摘抄、复制本文档内容的部分或全部,并不得以任何形式传播。
+
+
+
+## K230 AI Demo
+
+### 概述
+
+K230 AI Demo集合包括人脸、身体、手部、车牌相关的检测、识别、分割任务。
+
+### 硬件环境
+
+- K230-UNSIP-LP3-EVB-V1.0/K230-UNSIP-LP3-EVB-V1.1
+- K230-USIP-IMX335-SENSOR-V1.1模组
+
+### 源码位置
+
+源码路径位于`src/reference/ai_poc`,目录结构如下:
+
+``` shell
+.
+├── build_app.sh
+├── cmake
+├── CMakeLists.txt
+├── face_detection
+├── face_emotion
+├── face_gender
+├── face_glasses
+├── face_landmark
+├── face_mask
+├── face_parse
+├── face_pose
+├── falldown_detect
+├── fitness
+├── licence_det
+├── licence_det_rec
+├── object_detect_yolov8n
+├── person_attr
+├── person_detect
+├── pose_detect
+├── shell
+├── sq_hand_det
+├── sq_handkp_class
+├── sq_handkp_det
+├── sq_handreco
+└── vehicle_attr
+```
+
+kmodel及image路径位于`src/big/kmodel/ai_poc`,目录结构如下:
+
+``` shell
+.
+├── images
+│ ├── 1024x1331.jpg
+│ ├── 1024x624.jpg
+│ ├── bus.jpg
+│ ├── car.jpg
+│ ├── falldown_elder.jpg
+│ ├── hrnet_demo.jpg
+│ ├── input_hd.jpg
+│ └── test.jpg
+└── kmodel
+ ├── face_detection_320.kmodel
+ ├── face_emotion.kmodel
+ ├── face_gender.kmodel
+ ├── face_glasses.kmodel
+ ├── face_landmark.kmodel
+ ├── face_mask.kmodel
+ ├── face_parse.kmodel
+ ├── face_pose.kmodel
+ ├── hand_det.kmodel
+ ├── handkp_det.kmodel
+ ├── hand_reco.kmodel
+ ├── licence_reco.kmodel
+ ├── LPD_320.kmodel
+ ├── LPD_640.kmodel
+ ├── person_pulc.kmodel
+ ├── vehicle.kmodel
+ ├── yolov5n-falldown.kmodel
+ ├── yolov5n.kmodel
+ ├── yolov8n_320.kmodel
+ ├── yolov8n_640.kmodel
+ └── yolov8n-pose.kmodel
+```
+
+### 编译及运行程序
+
+1.进入src/reference/ai_poc
+2.执行build_app.sh脚本(之前脚本前确保src/big/kmodel/ai_poc下已经有相应kmodel和images),会将kmodel、images、shell、elf统一拷贝生成到k230_bin文件夹
+3.将整个文件夹拷贝到板子上,在大核上执行sh脚本即可运行相应demo.
diff --git "a/zh/02_applications/business_poc/K230_\345\234\272\346\231\257\345\256\236\346\210\230_\346\231\272\350\203\275\351\227\250\351\224\201.md" "b/zh/02_applications/business_poc/K230_\345\234\272\346\231\257\345\256\236\346\210\230_\346\231\272\350\203\275\351\227\250\351\224\201.md"
new file mode 100755
index 0000000..9d81faf
--- /dev/null
+++ "b/zh/02_applications/business_poc/K230_\345\234\272\346\231\257\345\256\236\346\210\230_\346\231\272\350\203\275\351\227\250\351\224\201.md"
@@ -0,0 +1,132 @@
+# K230 场景实战-智能门锁POC
+
+
+
+版权所有©2023北京嘉楠捷思信息技术有限公司
+
+
+
+## 免责声明
+
+您购买的产品、服务或特性等应受北京嘉楠捷思信息技术有限公司(“本公司”,下同)及其关联公司的商业合同和条款的约束,本文档中描述的全部或部分产品、服务或特性可能不在您的购买或使用范围之内。除非合同另有约定,本公司不对本文档的任何陈述、信息、内容的正确性、可靠性、完整性、适销性、符合特定目的和不侵权提供任何明示或默示的声明或保证。除非另有约定,本文档仅作为使用指导参考。
+
+由于产品版本升级或其他原因,本文档内容将可能在未经任何通知的情况下,不定期进行更新或修改。
+
+## 商标声明
+
+、“嘉楠”和其他嘉楠商标均为北京嘉楠捷思信息技术有限公司及其关联公司的商标。本文档可能提及的其他所有商标或注册商标,由各自的所有人拥有。
+
+**版权所有 © 2023北京嘉楠捷思信息技术有限公司。保留一切权利。**
+非经本公司书面许可,任何单位和个人不得擅自摘抄、复制本文档内容的部分或全部,并不得以任何形式传播。
+
+
+
+## K230 智能门锁
+
+在K230平台开发的一套集成UI、人脸检测、人脸识别、人脸注册功能的程序。
+
+### 硬件环境
+
+- K230-USIP-LP3-EVB-V1.0/K230-USIP-LP3-EVB-V1.1
+- 配套的LCD模组
+- K230-USIP-IMX335-SENSOR-V1.1模组
+
+### 概述
+
+智能门锁程序作为一个POC项目,提供给客户如何使用lvgl、大小核通信、多媒体pipeline及ai等功能的参考,程序主要分两部分,大核端程序主要完成视频输入输出,AI处理等相关的功能,小核端完成UI及人脸特征值管理的功能,大小核通过IPCMSG进行通信,现阶段只支持sd卡启动,后续会支持emmc、norflash等启动。
+
+### 源码位置
+
+大核端程序源码路径位于`src/reference/business_poc/door_lock`,目录结构如下:
+
+```sh
+.
+├── anchors_320.cc
+├── CMakeLists.txt
+├── main.cc
+├── mbface.kmodel
+├── mobile_face.cc
+├── mobile_face.h
+├── mobile_retinaface.cc
+├── mobile_retinaface.h
+├── model.cc
+├── model.h
+├── retinaface.kmodel
+├── util.cc
+├── util.h
+└── vi_vo.h
+
+```
+
+小核端程序源码路径位于`src/little/buildroot-ext/package/door_lock`,目录结构如下:
+
+```sh
+.
+├── Config.in
+├── src
+│ ├── CMakeLists.txt
+│ └── ui
+│ ├── CMakeLists.txt
+│ ├── data
+│ │ └── img
+│ │ ├── delete.png
+│ │ ├── import.png
+│ │ └── signup.png
+│ ├── demo
+│ │ └── main.c
+│ ├── lvgl_port
+│ │ ├── CMakeLists.txt
+│ │ ├── k230
+│ │ │ ├── buf_mgt.cpp
+│ │ │ ├── buf_mgt.hpp
+│ │ │ ├── CMakeLists.txt
+│ │ │ ├── lv_port_disp.cpp
+│ │ │ └── lv_port_indev.c
+│ │ ├── lv_conf_demo.h
+│ │ ├── lv_conf.h
+│ │ └── lv_port.h
+│ └── src
+│ ├── db_proc.c
+│ ├── db_proc.h
+│ ├── main.c
+│ ├── msg_proc.cpp
+│ ├── msg_proc.h
+│ ├── scr_main.c
+│ ├── scr_signup.c
+│ ├── sdk_autoconf.h
+│ └── ui_common.h
+└── src.mk
+
+```
+
+#### 编译程序
+
+大核程序编译:在`k230_sdk`目录下执行`make poc`,在`k230_sdk/src/reference/business_poc/door_lock/out`目录下生成`door_lock.elf`
+小核程序编译:在`k230_sdk`目录下执行`make buildroot-menuconfig`,进入`External options`选项,选中以下选项,如图所示:
+保存配置并退出图形配置界面,依次执行`make buildroot-savedefconfig`和`make buildroot`命令,
+在`k230_sdk/output/k230_evb_defconfig/little/buildroot-ext/target`下生成`app`目录
+
+#### 运行程序
+
+1. 加载模型到开发板
+从`k230_sdk/src/big/kmodel/door_lock`目录下拷贝`retinaface.kmodel`和`mbface.kmodel`两个模型拷贝到小核/sharefs下
+1. 加载程序到开发板
+将大核编译好的程序拷贝到小核/sharefs下
+将小核编译好的程序整个`app`目录拷贝到小核根目录下
+1. 加载动态链接库
+将小核编译好的动态链接库`libdisp.so`、`liblvgl.so`和`liblv_drivers.so`放到小核的`/usr/lib`下,编译完成的动态链接库位置`k230_sdk/output/k230_evb_defconfig/little/buildroot-ext/target/usr/lib/`
+1. 系统启动后大核进入/sharefs之后在大核端执行命令
+`door_lock.elf retinaface.kmodel mbface.kmodel`
+1. 在小核端执行命令
+`/app/door_lock/ui/ui`
+
+#### 功能演示
+
+1. 大小核程序启动后界面显示如下:
+
+1. sd人脸图片导入功能,必须在/sharefs/pic下放入图片,为保证识别效果,导入图片的格式要求为jpg,分辨率为720*1280,用户把需要导入的人脸图片放到`/sharefs/pic`下,按下图片导入键,程序会自动完成提取特征值功能,并以图片的文件名为识别成功后的lable,操作效果如下:
+
+1. 人脸实时注册功能,点击人脸注册按钮,通过UI展示的键盘输入lable,为保证识别效果,注册时人脸应位于图像的中央,操作效果如下:
+识别效果:
+
+1. 人脸底库删除功能,删除所有通过sd卡和人脸实时注册的人脸,操作效果如下:
diff --git a/zh/02_applications/business_poc/images/canaan-cover.png b/zh/02_applications/business_poc/images/canaan-cover.png
new file mode 100755
index 0000000..0319765
Binary files /dev/null and b/zh/02_applications/business_poc/images/canaan-cover.png differ
diff --git a/zh/02_applications/business_poc/images/canaan-lable.png b/zh/02_applications/business_poc/images/canaan-lable.png
new file mode 100755
index 0000000..009a662
Binary files /dev/null and b/zh/02_applications/business_poc/images/canaan-lable.png differ
diff --git a/zh/02_applications/business_poc/images/door_lock_delete.png b/zh/02_applications/business_poc/images/door_lock_delete.png
new file mode 100644
index 0000000..994aea5
Binary files /dev/null and b/zh/02_applications/business_poc/images/door_lock_delete.png differ
diff --git a/zh/02_applications/business_poc/images/door_lock_import.png b/zh/02_applications/business_poc/images/door_lock_import.png
new file mode 100644
index 0000000..bdc8bed
Binary files /dev/null and b/zh/02_applications/business_poc/images/door_lock_import.png differ
diff --git a/zh/02_applications/business_poc/images/door_lock_menu.png b/zh/02_applications/business_poc/images/door_lock_menu.png
new file mode 100644
index 0000000..b56f01f
Binary files /dev/null and b/zh/02_applications/business_poc/images/door_lock_menu.png differ
diff --git a/zh/02_applications/business_poc/images/door_lock_singup.png b/zh/02_applications/business_poc/images/door_lock_singup.png
new file mode 100644
index 0000000..52e5568
Binary files /dev/null and b/zh/02_applications/business_poc/images/door_lock_singup.png differ
diff --git a/zh/02_applications/business_poc/images/door_lock_singup_show.png b/zh/02_applications/business_poc/images/door_lock_singup_show.png
new file mode 100644
index 0000000..e770e75
Binary files /dev/null and b/zh/02_applications/business_poc/images/door_lock_singup_show.png differ
diff --git a/zh/02_applications/business_poc/images/little_door_lock.png b/zh/02_applications/business_poc/images/little_door_lock.png
new file mode 100644
index 0000000..0770c50
Binary files /dev/null and b/zh/02_applications/business_poc/images/little_door_lock.png differ
diff --git a/zh/02_applications/business_poc/images/logo.png b/zh/02_applications/business_poc/images/logo.png
new file mode 100755
index 0000000..aa48558
Binary files /dev/null and b/zh/02_applications/business_poc/images/logo.png differ
diff --git a/zh/02_applications/fancy_poc/.gitkeep b/zh/02_applications/fancy_poc/.gitkeep
new file mode 100644
index 0000000..e69de29
diff --git "a/zh/02_applications/tutorials/K230_AI\345\256\236\346\210\230_HHB\347\245\236\347\273\217\347\275\221\347\273\234\346\250\241\345\236\213\351\203\250\347\275\262\345\267\245\345\205\267.md" "b/zh/02_applications/tutorials/K230_AI\345\256\236\346\210\230_HHB\347\245\236\347\273\217\347\275\221\347\273\234\346\250\241\345\236\213\351\203\250\347\275\262\345\267\245\345\205\267.md"
new file mode 100755
index 0000000..1ec3bd6
--- /dev/null
+++ "b/zh/02_applications/tutorials/K230_AI\345\256\236\346\210\230_HHB\347\245\236\347\273\217\347\275\221\347\273\234\346\250\241\345\236\213\351\203\250\347\275\262\345\267\245\345\205\267.md"
@@ -0,0 +1,322 @@
+# K230 AI实战 - HHB神经网络模型部署工具
+
+
+
+版权所有©2023北京嘉楠捷思信息技术有限公司
+
+
+
+## 免责声明
+
+您购买的产品、服务或特性等应受北京嘉楠捷思信息技术有限公司(“本公司”,下同)及其关联公司的商业合同和条款的约束,本文档中描述的全部或部分产品、服务或特性可能不在您的购买或使用范围之内。除非合同另有约定,本公司不对本文档的任何陈述、信息、内容的正确性、可靠性、完整性、适销性、符合特定目的和不侵权提供任何明示或默示的声明或保证。除非另有约定,本文档仅作为使用指导参考。
+
+由于产品版本升级或其他原因,本文档内容将可能在未经任何通知的情况下,不定期进行更新或修改。
+
+## 商标声明
+
+、“嘉楠”和其他嘉楠商标均为北京嘉楠捷思信息技术有限公司及其关联公司的商标。本文档可能提及的其他所有商标或注册商标,由各自的所有人拥有。
+
+**版权所有 © 2023北京嘉楠捷思信息技术有限公司。保留一切权利。**
+非经本公司书面许可,任何单位和个人不得擅自摘抄、复制本文档内容的部分或全部,并不得以任何形式传播。
+
+
+
+## 目录
+
+[TOC]
+
+## 前言
+
+### 简述
+
+本文档为平头哥的HHB在k230硬件平台的使用说明文档,指导用户如何在HHB上编译模型生成c代码, 如何使用k230交叉编译工具链编译程序和上板运行等.
+
+### 读者对象
+
+本文档(本指南)主要适用于以下人员:
+
+- 软件开发工程师
+
+### 缩略词定义
+
+| 简称 | 说明 |
+| ---- | ---------------------------------- |
+| HHB | Heterogeneous Honey Badger |
+| SHL | Structure of Heterogeneous Library |
+
+### 修订记录
+
+| 文档版本号 | 修改说明 | 修改者 | 日期 |
+| ---------- | -------- | ------ | --------- |
+| V1.0 | 文档初版 | 张扬 | 2023/6/25 |
+
+## 1. 概述
+
+HHB程序在k230 rtt上部署运行, 需要如下步骤
+
+- 基于HHB开发环境, 编译模型生成c代码
+- 使用k230 rtt交叉编译工具链编译c代码
+- 上板运行可执行程序
+
+### 1.1 HHB
+
+HHB (Heterogeneous Honey Badger) 是 T-Head 提供的一套针对玄铁芯片平台的神经网络模型部署工具集。包括了编译优化,性能分析,过程调试,结果模拟等一系列部署时所需的工具。
+
+HHB 的功能与特性:
+
+- 支持 caffe,tensorflow,onnx 和 tflite 对应格式的模型
+- 支持 8/16 位定点和 16/32 位浮点等数据类型
+- 支持对称和非对称定点量化,支持通道量化
+- 可在部署前优化模型的网络结构
+- 编译生成可在无剑 SoC 平台上执行的二进制
+- 支持在主机上做行为模拟
+- 多组件形式的工具集方便二次开发
+- 同时提供传统习惯的 Unix 命令行和 Python 接口
+
+HHB 已支持语音和视觉的多种不同业务算法,可导入 PyTorch 和 TensorFlow 等不同训练框架的模型。
+
+HHB 以开源项目 [TVM](https://github.com/apache/tvm) 为基础架构,添加了丰富的命令行选项提供命令模式;预置了多类量化算法适配不同平台可支持的数据类型;根据不同平台特点,输出调用 SHL 的 C 代码,或者直接输出可执行的二进制。
+
+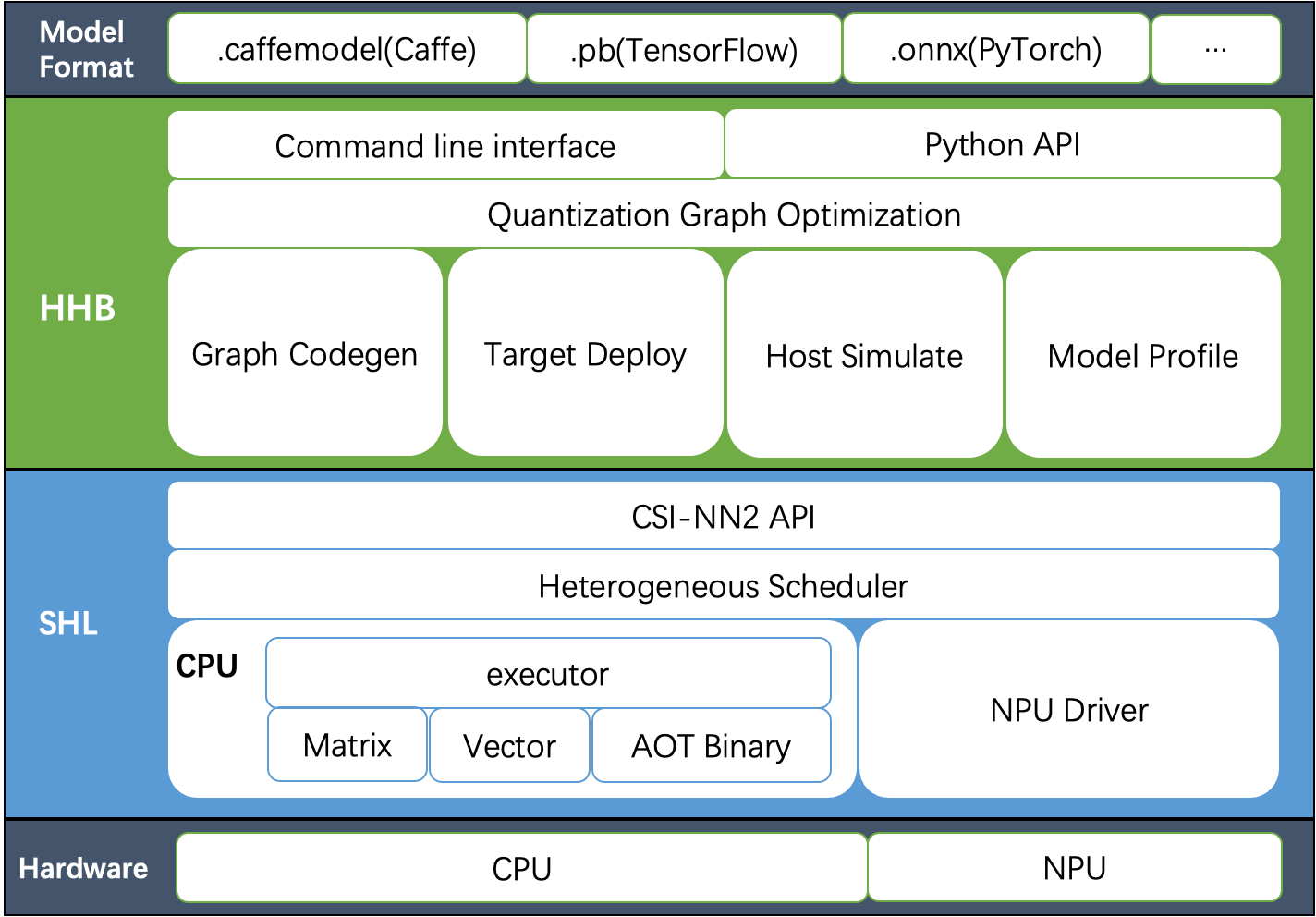
+
+详细使用方法可参考[HHB用户手册](https://www.yuque.com/za4k4z/oxlbxl)
+
+### 1.2 SHL
+
+SHL 是 T-HEAD 提供的一组针对玄铁 CPU 平台的神经网络库 API。抽象了各种常用的网络层的接口,并且提供一系列已优化的二进制库。
+
+SHL 的特性:
+
+- C 代码版本的参考实现。
+- 提供玄铁系列 CPU 的汇编优化实现。
+- 支持对称量化和非对称量化。
+- 支持8位定点,16位定点和16位浮点等数据类型。
+- 兼容 NCHW 和 NHWC 格式。
+- 搭配 [HHB](https://www.yuque.com/za4k4z/oxlbxl) 实现代码自动调用。
+- 覆盖 CPU,NPU 等不同体系结构。
+- 附加异构参考实现。
+
+SHL 提供了完成的接口声明和接口的参考实现,各个设备提供商可以依此针对性的完成各个接口的优化工作。
+
+详细使用方法可参考[SHL用户手册](https://www.yuque.com/za4k4z/isgz8o/ayilv9)
+
+## 2. HHB编译模型
+
+### 2.1 环境搭建
+
+> 前置条件: 本地PC已安装docker
+
+- 去[HHB](https://occ.t-head.cn/product?id=3865005559921381376&type=soft)下载hhb-2.2.35 docker image
+
+- 解压/加载/启动docker image
+
+ ```shell
+ tar xzf hhb-2.2.35.docker.tar.gz
+ cd hhb-2.2.35.docker/
+ docker load < hhb.2.2.35.img.tar
+ ./start_hhb.sh
+ ```
+
+### 2.2 编译模型
+
+目前这个版本docker image没有集成c908模型编译, 这里拷贝c906并修改相关配置。
+
+```shell
+root@02297217e66d:~# cd /home/example/
+root@02297217e66d:/home/example# cp -a c906 c908
+root@02297217e66d:/home/example# cd c908/onnx_mobilenetv2/
+```
+
+run.sh相关修改
+
+- 修改--board参数的值(c906改为c908)
+- 添加校正集参数( -cd )
+- 添加量化参数(--quantization-scheme)
+
+最后修改后run.sh内容如下
+
+```shell
+#!/bin/bash -x
+
+hhb -S --model-file mobilenetv2-12.onnx --data-scale 0.017 --data-mean "124 117 104" --board c908 --input-name "input" --output-name "output" --input-shape "1 3 224 224" --postprocess save_and_top5 --simulate-data persian_cat.jpg -cd persian_cat.jpg --quantization-scheme "int8_asym_w_sym" --fuse-conv-relu
+```
+
+> 注: 不同的模型, 编译参数有可能不同,会造成性能数据差异。用户需要基于自己的模型, 深入了解hhb各参数含义(hhb -h)或者咨询平头哥等。
+
+执行run.sh开始编译
+
+```shell
+root@02297217e66d:/home/example/c908/onnx_mobilenetv2# ./run.sh
++ hhb -S --model-file mobilenetv2-12.onnx --data-scale 0.017 --data-mean '124 117 104' --board c908 --input-name input --output-name output --input-shape '1 3 224 224' --postprocess save_and_top5 --simulate-data persian_cat.jpg -cd persian_cat.jpg --quantization-scheme int8_asym_w_sym --fuse-conv-relu
+[2023-06-21 09:02:53] (HHB LOG): Start import model.
+[2023-06-21 09:02:55] (HHB LOG): Model import completed!
+[2023-06-21 09:02:55] (HHB LOG): Start quantization.
+[2023-06-21 09:02:55] (HHB LOG): get calibrate dataset from persian_cat.jpg
+[2023-06-21 09:02:55] (HHB LOG): Start optimization.
+[2023-06-21 09:02:55] (HHB LOG): Optimization completed!
+Calibrating: 100%|###############################################################################################################################################################################################################################| 153/153 [00:14<00:00, 10.66it/s]
+[2023-06-21 09:03:10] (HHB LOG): Start conversion to csinn.
+[2023-06-21 09:03:10] (HHB LOG): Conversion completed!
+[2023-06-21 09:03:10] (HHB LOG): Start operator fusion.
+[2023-06-21 09:03:10] (HHB LOG): Operator fusion completed!
+[2023-06-21 09:03:10] (HHB LOG): Start operator split.
+[2023-06-21 09:03:10] (HHB LOG): Operator split completed!
+[2023-06-21 09:03:10] (HHB LOG): Start layout convert.
+[2023-06-21 09:03:10] (HHB LOG): Layout convert completed!
+[2023-06-21 09:03:10] (HHB LOG): Quantization completed!
+[2023-06-21 09:03:14] (HHB LOG): cd hhb_out; qemu-riscv64 -cpu c908v hhb_runtime ./hhb.bm persian_cat.jpg.0.bin
+Run graph execution time: 1675.78113ms, FPS=0.60
+
+=== tensor info ===
+shape: 1 3 224 224
+data pointer: 0x2e0b40
+
+=== tensor info ===
+shape: 1 1000
+data pointer: 0x325530
+The max_value of output: 16.053827
+The min_value of output: -8.026914
+The mean_value of output: 0.002078
+The std_value of output: 11.213154
+ ============ top5: ===========
+283: 16.053827
+281: 14.920615
+282: 12.559759
+285: 12.182022
+287: 11.520982
+```
+
+最后生成hhb_out目录,如下
+
+```shell
+root@02297217e66d:/home/example/c908/onnx_mobilenetv2# ll hhb_out
+total 17940
+drwxr-xr-x 2 root root 4096 Jun 21 09:03 ./
+drwxr-xr-x 5 root root 4096 Jun 21 09:02 ../
+-rw-r--r-- 1 root root 3554304 Jun 21 09:03 hhb.bm
+-rwxr-xr-x 1 root root 6140744 Jun 21 09:03 hhb_runtime*
+-rw-r--r-- 1 root root 602112 Jun 21 09:03 input.0.bin
+-rw-r--r-- 1 root root 2860548 Jun 21 09:03 input.0.tensor
+-rw-r--r-- 1 root root 4946 Jun 21 09:03 io.c
+-rw-r--r-- 1 root root 1539 Jun 21 09:03 io.h
+-rw-r--r-- 1 root root 7410 Jun 21 09:03 main.c
+-rw-r--r-- 1 root root 81352 Jun 21 09:03 main.o
+-rw-r--r-- 1 root root 112618 Jun 21 09:03 model.c
+-rw-r--r-- 1 root root 791576 Jun 21 09:03 model.o
+-rw-r--r-- 1 root root 3546112 Jun 21 09:03 model.params
+-rw-r--r-- 1 root root 602112 Jun 21 09:03 persian_cat.jpg.0.bin
+-rw-r--r-- 1 root root 9534 Jun 21 09:03 persian_cat.jpg.0.bin_output0_1_1000.txt
+-rw-r--r-- 1 root root 20086 Jun 21 09:03 process.c
+-rw-r--r-- 1 root root 2040 Jun 21 09:03 process.h
+```
+
+将hhb_out目录拷贝到/mnt,导出到PC, 后续需要使用k230 rtt工具链重新交叉编译。
+
+```shell
+root@02297217e66d:/home/example/c908/onnx_mobilenetv2# cp -a hhb_out/ /mnt/
+```
+
+## 3. Demo
+
+### 3.1 环境搭建
+
+> 前置条件: 用户已按照 k230_sdk文档编译了docker image
+
+启动k230 docker image
+
+```shell
+cd /path/to/k230_sdk
+docker run -u root -it -v $(pwd):$(pwd) -v $(pwd)/toolchain:/opt/toolchain -w $(pwd) k230_docker /bin/bash
+```
+
+### 3.2 编译demo
+
+我们在k230_sdk中提供了HHB的demo, 用户只需将HHB编译的c代码拷贝过来即可编译出上板运行的可执行程序。
+
+相关目录说明
+
+| 目录 | 备注 |
+| ------------------------------------------------------------ | ------------------------------------------------------------ |
+| /path/to/k230_sdk/src/big/utils/examples/hhb | 用户可修改CMakeLists.txt追加demo |
+| /path/to/k230_sdk/src/big/utils/lib目录下的csi-nn2和hhb-prebuilt-decode | c代码依赖的预编译库(csi-nn2/jpeg/png/zlib等, 使用musl交叉编译工具链编译) |
+
+准备用例
+
+mbv2_onnx_int8目录就是前面HHB生成的c代码, 用户修改了模型编译参数后, 需要同步更新过来.
+
+用户也可以根据自己的模型,新增demo, 修改CMakeLists.txt即可。
+
+开始编译
+
+```shell
+root@9d2a450436a7:/home/zhangyang/workspace/k230_sdk# cd src/big/utils/examples/hhb/
+root@9d2a450436a7:/home/zhangyang/workspace/k230_sdk/src/big/utils/examples/hhb# ./build_app.sh
+```
+
+最后生成的可执行程序为out/bin/mbv2_onnx_int8.elf
+
+```shell
+root@9d2a450436a7:/home/zhangyang/workspace/k230_sdk/src/big/utils/examples/hhb# ll out/bin/mbv2_onnx_int8.elf
+-rwxr-xr-x 1 root root 1172680 Jun 25 14:37 out/bin/mbv2_onnx_int8.elf*
+```
+
+将mbv2_onnx_int8运行的相关文件传送到小核linux的/sharefs目录
+
+```shell
+[root@canaan /sharefs/k230/mbv2_onnx_int8 ]#ls -l
+total 5560
+-rw-r--r-- 1 sshd sshd 3554304 Jun 25 2023 hhb.bm
+-rwxr-xr-x 1 sshd sshd 1172680 Jun 25 2023 mbv2_onnx_int8.elf
+-rw-r--r-- 1 sshd sshd 359355 Jun 25 2023 persian_cat.jpg
+-rw-r--r-- 1 sshd sshd 602112 Jun 25 2023 persian_cat.jpg.0.bin
+```
+
+### 3.3 运行demo
+
+- 启动k230, 在大核rtt串口下, 执行如下命令
+
+```shell
+msh />cd /sharefs/k230/mbv2_onnx_int8/
+
+msh /sharefs/k230/mbv2_onnx_int8>./mbv2_onnx_int8.elf hhb.bm persian_cat.jpg.0.bin
+Run graph execution time: 64.71648ms, FPS=15.45
+
+=== tensor info ===
+shape: 1 3 224 224
+data pointer: 0x300170060
+
+=== tensor info ===
+shape: 1 1000
+data pointer: 0x300194c80
+The max_value of output: 15.581656
+The min_value of output: -8.026914
+The mean_value of output: 0.008405
+The std_value of output: 11.703238
+ ============ top5: ===========
+283: 15.581656
+281: 14.731747
+282: 12.559759
+285: 11.709850
+287: 11.143245
+
+msh /sharefs/k230/mbv2_onnx_int8>./mbv2_onnx_int8.elf hhb.bm persian_cat.jpg
+Run graph execution time: 64.67589ms, FPS=15.46
+
+=== tensor info ===
+shape: 1 3 224 224
+data pointer: 0x300170060
+
+=== tensor info ===
+shape: 1 1000
+data pointer: 0x300194c80
+The max_value of output: 16.053827
+The min_value of output: -8.026914
+The mean_value of output: 0.009821
+The std_value of output: 12.815542
+ ============ top5: ===========
+283: 16.053827
+281: 15.109484
+282: 13.220798
+287: 12.087587
+285: 11.804284
+```
diff --git "a/zh/02_applications/tutorials/K230_GPU\345\272\224\347\224\250\345\256\236\346\210\230.md" "b/zh/02_applications/tutorials/K230_GPU\345\272\224\347\224\250\345\256\236\346\210\230.md"
new file mode 100644
index 0000000..c3a4734
--- /dev/null
+++ "b/zh/02_applications/tutorials/K230_GPU\345\272\224\347\224\250\345\256\236\346\210\230.md"
@@ -0,0 +1,361 @@
+# K230 GPU 应用实战 - VGLite 绘制酷炫图形
+
+
+
+版权所有©2023北京嘉楠捷思信息技术有限公司
+
+
+
+## 免责声明
+
+您购买的产品、服务或特性等应受北京嘉楠捷思信息技术有限公司(“本公司”,下同)及其关联公司的商业合同和条款的约束,本文档中描述的全部或部分产品、服务或特性可能不在您的购买或使用范围之内。除非合同另有约定,本公司不对本文档的任何陈述、信息、内容的正确性、可靠性、完整性、适销性、符合特定目的和不侵权提供任何明示或默示的声明或保证。除非另有约定,本文档仅作为使用指导参考。
+
+由于产品版本升级或其他原因,本文档内容将可能在未经任何通知的情况下,不定期进行更新或修改。
+
+## 商标声明
+
+、“嘉楠”和其他嘉楠商标均为北京嘉楠捷思信息技术有限公司及其关联公司的商标。本文档可能提及的其他所有商标或注册商标,由各自的所有人拥有。
+
+**版权所有 © 2023北京嘉楠捷思信息技术有限公司。保留一切权利。**
+非经本公司书面许可,任何单位和个人不得擅自摘抄、复制本文档内容的部分或全部,并不得以任何形式传播。
+
+
+
+## 目录
+
+[TOC]
+
+## 前言
+
+### 概述
+
+本文档主要介绍使用K230 GPU 绘制矢量图形。
+
+### 读者对象
+
+本文档(本指南)主要适用于以下人员:
+
+- 技术支持工程师
+- 软件开发工程师
+
+### 缩略词定义
+
+| 简称 | 全称 |
+|------|-----------------------|
+| GPU | Graphics Process Unit |
+| SVG | Scalable Vector Graphics |
+| DRM | Direct Rendering Manager |
+
+### 修订记录
+
+| 文档版本号 | 修改说明 | 修改者 | 日期 |
+| ---------- | -------- | ---------- | ---------- |
+| V1.0 | 初版 | 黄子懿 | 2023-06-20 |
+
+## 概念介绍
+
+### 矢量图基础
+
+矢量图形是用点、直线或者多边形等基于数学方程的几何图元表示的图像,矢量图形与使用像素表示图像的位图不同,可以无限放大而不失真。SVG是一种典型的矢量图格式,其本身是XML文本文件,描述各种图元的位置,通过浏览器打开即可看到渲染后的效果,如果你完全不了解 K230 GPU 使用的 VGLite API,可以把他看成是一个弱化版的 SVG。
+
+K230 GPU 支持多种二维图元
+
+- 直线
+- 二次贝塞尔曲线
+- 三次贝塞尔曲线
+- 圆曲线(当然也可以用三次贝塞尔曲线拟合)
+
+注意:**这些图形都是线条,GPU 不能直接绘制线条,只能绘制由这些线条围成的闭合图形。**
+
+### GPU 基础
+
+在 K230 SDK 的小核 Linux 上,主要通过调用 VGLite API 来与 GPU 交互。VGLite 内部会维护一个 GPU 的命令队列,当需要完成绘制,或者队列满时会提交到 GPU 硬件进行渲染。命令队列的长度默认为65536,可以调用 `vg_lite_set_command_buffer_size` 函数进行修改。
+
+注意:**VGLite API 不支持在多线程上下文中使用,如果你的应用程序使用了多线程,请确保只有一个线程会使用VGLite API**。
+
+K230 GPU 是一个 memory-to-memory 设备,本身不具备显示输出能力,如果需要显示可以与 DRM 配合使用。
+
+## 使用 VGLite API
+
+### 开发环境准备
+
+VGLite API 主要包含两个部分,头文件和库文件,其中头文件的位置在
+
+```text
+/src/little/buildroot-ext/package/vg_lite/inc/vg_lite.h
+```
+
+将 K230 SDK 完整编译后,库文件会放在
+
+```text
+/output/k230_evb_defconfig/little/buildroot-ext/target/usr/lib/libvg_lite.so
+```
+
+#### make
+
+将代码的源文件放到 `src` 目录下,创建一个 Makefile 并将如下内容粘贴进去即可使用`make`命令进行构建,构建完成后将在 Makefile 同级目录下生成可执行文件,将其拷贝到小核 linux 上运行即可,也可以使用 `make install` 将其拷贝到 K230 SDK,再到 K230 SDK 目录下构建镜像,再烧录到 SD 卡或 eMMC 启动。
+
+```Makefile
+K230SDK ?= /path/to/k230_sdk
+BIN := test-vglite
+
+CC := "$(K230SDK)/toolchain/Xuantie-900-gcc-linux-5.10.4-glibc-x86_64-V2.6.0/bin/riscv64-unknown-linux-gnu-gcc"
+CXX := "$(K230SDK)/toolchain/Xuantie-900-gcc-linux-5.10.4-glibc-x86_64-V2.6.0/bin/riscv64-unknown-linux-gnu-g++"
+
+CFLAGS += -I"$(K230SDK)/src/little/buildroot-ext/package/vg_lite/inc" -I"$(K230SDK)output/k230_evb_defconfig/little/buildroot-ext/host/riscv64-buildroot-linux-gnu/sysroot/usr/include"
+CFLAGS += -L"$(K230SDK)/output/k230_evb_defconfig/little/buildroot-ext/target/usr/lib"
+CFLAGS += -lvg_lite -lvg_lite_util -ldrm
+CFLAGS += -Wall -g
+
+CXXFLAGS := $(CFLAGS)
+
+SRCDIR := ./src
+OBJDIR := ./objs
+SRCS := $(wildcard $(SRCDIR)/*.c) $(wildcard $(SRCDIR)/*.cpp)
+OBJS := $(patsubst $(SRCDIR)/%.c,$(OBJDIR)/%.o,$(filter %.c, $(SRCS))) \
+ $(patsubst $(SRCDIR)/%.cpp,$(OBJDIR)/%.o,$(filter %.cpp, $(SRCS)))
+DEPS := $(patsubst $(SRCDIR)/%.c,$(OBJDIR)/%.d,$(filter %.c, $(SRCS))) \
+ $(patsubst $(SRCDIR)/%.cpp,$(OBJDIR)/%.d,$(filter %.cpp, $(SRCS)))
+
+all: $(BIN)
+
+$(OBJDIR):
+ mkdir -p $(OBJDIR)
+
+$(BIN): $(OBJS)
+ $(CXX) $(CXXFLAGS) $(OBJS) -o $@
+
+$(OBJDIR)/%.o: $(SRCDIR)/%.c | $(OBJDIR)
+ $(CC) $(CFLAGS) -MMD -c $< -o $@
+
+$(OBJDIR)/%.o: $(SRCDIR)/%.cpp | $(OBJDIR)
+ $(CXX) $(CXXFLAGS) -MMD -c $< -o $@
+
+-include $(DEPS)
+
+clean:
+ rm -rf $(OBJDIR) $(BIN)
+
+install:
+ cp $(BIN) "$(K230SDK)/output/k230_evb_defconfig/little/buildroot-ext/target/usr/bin"
+
+uninstall:
+ rm "$(K230SDK)/output/k230_evb_defconfig/little/buildroot-ext/target/usr/bin/$(BIN)"
+
+.PHONY: all clean install
+
+```
+
+#### CMake
+
+将代码的源文件放到 `src` 目录下,创建一个 `CMakeLists.txt` 文件并粘贴如下内容进去即可使用 cmake 构建。
+
+```CMakeLists.txt
+cmake_minimum_required(VERSION 3.0)
+project(test-vglite)
+set(K230SDK /path/to/k230_sdk)
+
+set(CMAKE_C_COMPILER "${K230SDK}/toolchain/Xuantie-900-gcc-linux-5.10.4-glibc-x86_64-V2.6.0/bin/riscv64-unknown-linux-gnu-gcc")
+set(CMAKE_CXX_COMPILER "${K230SDK}/toolchain/Xuantie-900-gcc-linux-5.10.4-glibc-x86_64-V2.6.0/bin/riscv64-unknown-linux-gnu-g++")
+set(CMAKE_C_FLAGS "-Wall")
+set(CMAKE_CXX_FLAGS "-Wall")
+
+include_directories(
+ "$(K230SDK)/output/k230_evb_defconfig/little/buildroot-ext/host/riscv64-buildroot-linux-gnu/sysroot/usr/include"
+ "$(K230SDK)/src/little/buildroot-ext/package/vg_lite/inc"
+)
+
+link_directories("${K230SDK}/output/k230_evb_defconfig/little/buildroot-ext/target/usr/lib")
+link_libraries(vg_lite vg_lite_util drm)
+
+file(GLOB SOURCES "src/*.c" "src/*.cpp")
+
+add_executable(${PROJECT_NAME} ${SOURCES})
+
+install(TARGETS ${PROJECT_NAME} DESTINATION "$(K230SDK)/output/k230_evb_defconfig/little/buildroot-ext/target/usr/bin")
+
+```
+
+### 显示
+
+K230 EVB 有一个1080x1920的显示屏,在小核linux上可以用 DRM 进行显示,让 GPU 驱动加载 DRM dumb buffer 可以减少内存拷贝,实现高效渲染。GPU+DRM 的相关代码可以参考 `vglite_drm` 这个 demo,读者可以将 `drm.c` 添加到自己的程序中。
+
+需要注意截至 K230 SDK v0.8,linux 上的 DRM 驱动仍然**不能**独立工作,需要依赖大核对 SoC 视频输出模块的配置,可以通过在大核上执行 `sample_vo.elf 3` 来完成。
+
+其次 DRM 的颜色格式枚举与 `vg_lite_buffer_format_t` 并不完全一致,例如 `VGLITE_BGRA8888` 表示的是红色在低8位,alpha在高8位的32位颜色,对应 DRM 中的 `DRM_FORMAT_ARGB8888`。
+
+
+
+如图是 vglite_drm 运行后屏幕正确显示的颜色:R(255)G(128)B(16)
+
+一般来说为了实现同步显示会需要两张 buffer 进行 ping-pong 交替显示,但是为了简化演示代码这里就只用了一张,读者可以自行实现垂直同步的双重缓冲区进行连续渲染。
+
+## 绘图
+
+### 一些准备
+
+首先需要初始化 VGLite,调用 `vg_lite_init` 来完成,它有两个参数 `tessellation_width` 和 `tessellation_height`,用于渲染窗口的大小,越大的话效率越高,如果为0则表示不使用矢量绘制功能,只能 BLIT,通常会设置为最大 buffer 的大小。
+
+渲染需要 buffer,可以从 DRM dumb 导入,像下面这样
+
+```c
+vg_lite_buffer_t buffer;
+int buf_fd;
+memset(&buffer, 0, sizeof(buffer));
+buf_fd = drm_get_dmabuf_fd(0);
+if (buf_fd < 0) {
+ perror("get fd");
+ return buf_fd;
+}
+memset(&buffer, 0, sizeof(buffer));
+buffer.width = width;
+buffer.height = height;
+buffer.format = VG_LITE_ARGB8888;
+buffer.stride = buffer.width * 4;
+if (vg_lite_from_dma_buf(buf_fd, &buffer.address)) {
+ perror("import dma-buf");
+ return -1;
+}
+```
+
+也可以从 GPU 驱动分配离屏 buffer,像下面这样
+
+```c
+vg_lite_buffer_t buffer;
+memset(&buffer, 0, sizeof(buffer));
+buffer.width = width;
+buffer.height = height;
+buffer.format = VG_LITE_ARGB8888;
+if (vg_lite_allocate(&buffer)) {
+ return -1;
+}
+```
+
+显然分配离屏 buffer 更简单,只需要配置分辨率和像素格式即可,而从 DRM dumb 导入还需要自己计算 stride(一行的字节数量),当然从 DRM dumb 导入的好处就是可以直接用于显示,当然从驱动分配的 buffer 也可以导入到 DRM 进行显示。
+
+### 多边形
+
+有 buffer 就可以开始绘制了。多边形由多条直线组成,以三角形为例,首先需要确定三角形三个顶点的坐标,例如`(0,0) (0,1) (1,0)`,整个过程如下
+
+1. 将画笔移动到`(0,0)`
+1. 画一条线到`(0,1)`
+1. 画一条线到`(1,0)`
+1. 画一条线到`(0,0)`
+1. 闭合图形
+
+查阅K230 GPU API参考可以看到移动的操作码是2,直线的操作码是4,闭合路径的操作码是0,使用第一种数据格式,可以构造 `path_data` 数组如下
+
+```c
+uint8_t path_data[] = {
+ 2, 0, 0, // 移动到 (0,0)
+ 4, 0, 1, // 直线到 (0,1)
+ 4, 1, 0, // 直线到 (1,0)
+ 4, 0, 0, // 直线到 (0,0)
+0};
+```
+
+只有 path_data 还是不够的,渲染需要的参数是 path,path 中除了 path_data 外还包含数据格式等信息,数据的格式可以指定为以下几种:
+
+1. 8bit 有符号整数
+1. 16bit 有符号整数
+1. 32bit 有符号整数
+1. 32bit 浮点数
+
+从上到下性能依次递减,不过即使是8bit有符号整数也不意味着只能覆盖-128到127的像素范围,因为还需要矩阵变换来计算最终坐标。
+
+现在构造 path,并绘制到 buffer
+
+```c
+vg_lite_path_t path = {
+ .bounding_box = {0., 1., 1., 0.}, // 图形的包围盒
+ .quality = VG_LITE_HIGH, // 渲染质量
+ .format = VG_LITE_S8, // 考虑到坐标很简单,所以 8bit 足够
+ .uploaded = 0, // 路径没有被上传过 GPU,所以用0
+ .path_length = sizeof(path_data), // 路径数据长度,以字节为单位
+ .path = path_data, // 路径数据就放在这了
+ .path_changed = 1, // 用来表示路径被更新过
+ .pdata_internal = 0 // 表示路径数据不是由驱动分配的
+};
+```
+
+有了上面那些变量后就可以执行渲染了,步骤如下
+
+1. 将 buffer 清空,即用一个单色填充,可以使用 `vg_lite_clear` 来完成
+1. 一个变换矩阵,关于矩阵可以参考仿射变换有关的内容,这里直接使用一个缩放矩阵,将图像放大100倍,这样最终长度为1的直线在图像中会使用100个像素
+1. 调用 `vg_lite_draw` 来将 path “渲染”到 buffer
+1. 最后,使用 `vg_lite_finish` 提交渲染
+
+为了方便错误处理,使用 `CHECK_ERROR` 宏来包裹返回 `vg_lite_error_t` 的函数
+
+```c
+vg_lite_matrix_t matrix;
+CHECK_ERROR(vg_lite_clear(&buffer, NULL, 0xffff0000)); // 使用蓝色填充整个 buffer
+vg_lite_identity(&matrix); // 初始化为单位矩阵
+vg_lite_translate(buffer.width / 2., buffer.height / 2., &matrix); // 移动到 buffer 中间位置
+vg_lite_scale(100., 100., &matrix); // x y 方向都放d大100倍
+CHECK_ERROR(vg_lite_draw(
+ &buffer, &path,
+ VG_LITE_FILL_NON_ZERO, // 填充规则,像素只要被覆盖就会被绘制
+ &matrix,
+ VG_LITE_BLEND_NONE, // 颜色混合规则,None 表示忽略透明度直接覆盖
+ 0xff0000ff // RGBA 颜色,这个值表示不透明的红色
+));
+CHECK_ERROR(vg_lite_finish()); // 提交到 GPU
+```
+
+完整的参考代码可以在 vglite_drm 中查看,下面是绘制出来的效果。
+
+
+
+可以很容易地发现,坐标系是以右为x正方向,以下为y正方向,这也是 SVG 所使用的坐标系。
+
+需要注意的是,我刚才说到 `vg_lite_draw` 时“渲染”是打了引号的,因为并没有真的渲染,只是写入渲染指令,最终渲染需要调用 `vg_lite_finish`,这样对性能是有好处的,实际使用中可以多次调用 `vg_lite_draw`,再最后实际显示前再执行 `vg_lite_finish`,因为 `vg_lite_finish`是系统调用,存在一定开销,而 `vg_lite_draw` 不是,可以执行得很快。
+
+当渲染完成后,可以将结果显示到屏幕或者保存为图片,需要注意保存图片时是用 CPU 来读取数据的,所以需要确保 `vg_lite_buffer_t::memory` 可读,如果读者使用上面 DRM 的代码来创建 `vg_lite_buffer_t`,那么没有映射 DRM dumb 的话是没法读取的。
+
+### 曲线
+
+K230 GPU 支持三种曲线,分别是
+
+1. 二次贝塞尔曲线
+1. 三次贝塞尔曲线
+1. 椭圆曲线
+
+当然椭圆曲线可以用三次贝塞尔曲线拟合,本质上可以看成是同样的曲线类型,与绘制多边形的情况一样,只需要修改操作码和数据即可。
+
+下面我们尝试将刚才画的三角形的底边改为二次贝塞尔曲线,并将中点放在`(1,1)`处,绘制一个近似圆角的图案,将上面 `path_data` 改为
+
+```c
+uint8_t path_data[] = {
+ 2, 0, 0,
+ 4, 0, 1,
+ 6, 1, 1, 1, 0, // 二次贝塞尔曲线,控制点(1,1),画到(1,0)
+ 4, 0, 0,
+0};
+```
+
+当然,为了更好地观察这条曲线,我们将缩放倍数开得更大一些,比如500倍,同时将位移也改小一些,使得图案近似在屏幕中央
+
+```c
+vg_lite_translate(buffer.width / 2., buffer.height / 2., &matrix);
+vg_lite_scale(500., 500., &matrix);
+```
+
+最后绘制的图案就像下面这样了
+
+
+
+### 位图填充
+
+当不满足于单色的填充时,可以使用位图图来填充,位图文件会被渲染到目标位置,当然位图也得是 `vg_lite_buffer_t` 才行,如果需要从本地的 JPEG/PNG 等文件中加载,那么建议使用离屏 buffer 来存储像素内容,用 `vg_lite_blit` 或者 `vg_lite_draw_pattern` 来渲染。
+
+### 渐变
+
+对于 VGLite 的实现来说,渐变本身是一种特殊的位图填充,`linear_grad` 相关函数会分配一个 1x256 的 buffer 进行 BLIT,当然使用者可以不关心上面的细节,拿来用就好,参考 `linearGrad` demo,具体过程可以分为以下几个调用
+
+1. `vg_lite_init_grad` 初始化一个渐变
+1. `vg_lite_set_grad` 设置颜色和止点,最多支持16个止点
+1. `vg_lite_update_grad` 更新渐变
+1. `vg_lite_get_grad_matrix` 获得渐变的变换矩阵指针
+1. 对变换矩阵进行调整,例如旋转和缩放,默认长度为256像素从左到右,如果需要其他方向的渐变需要用这个矩阵来操作
+1. `vg_lite_draw_gradient` 绘制渐变
diff --git "a/zh/02_applications/tutorials/K230_GUI\345\256\236\346\210\230_LVGL\347\247\273\346\244\215\346\225\231\347\250\213.md" "b/zh/02_applications/tutorials/K230_GUI\345\256\236\346\210\230_LVGL\347\247\273\346\244\215\346\225\231\347\250\213.md"
new file mode 100644
index 0000000..0f23e86
--- /dev/null
+++ "b/zh/02_applications/tutorials/K230_GUI\345\256\236\346\210\230_LVGL\347\247\273\346\244\215\346\225\231\347\250\213.md"
@@ -0,0 +1,187 @@
+# K230 GUI实战 - LVGL移植教程
+
+
+
+版权所有©2023北京嘉楠捷思信息技术有限公司
+
+
+
+## 免责声明
+
+您购买的产品、服务或特性等应受北京嘉楠捷思信息技术有限公司(“本公司”,下同)及其关联公司的商业合同和条款的约束,本文档中描述的全部或部分产品、服务或特性可能不在您的购买或使用范围之内。除非合同另有约定,本公司不对本文档的任何陈述、信息、内容的正确性、可靠性、完整性、适销性、符合特定目的和不侵权提供任何明示或默示的声明或保证。除非另有约定,本文档仅作为使用指导参考。
+
+由于产品版本升级或其他原因,本文档内容将可能在未经任何通知的情况下,不定期进行更新或修改。
+
+## 商标声明
+
+、“嘉楠”和其他嘉楠商标均为北京嘉楠捷思信息技术有限公司及其关联公司的商标。本文档可能提及的其他所有商标或注册商标,由各自的所有人拥有。
+
+**版权所有 © 2023北京嘉楠捷思信息技术有限公司。保留一切权利。**
+非经本公司书面许可,任何单位和个人不得擅自摘抄、复制本文档内容的部分或全部,并不得以任何形式传播。
+
+
+
+## K230 GUI实战
+
+LVGL是流行的免费开源嵌入式图形库,可以用于嵌入式系统的图形用户界面(GUI)开发。
+
+### 硬件环境
+
+- K230-USIP-LP3-EVB-V1.1
+- 配套的LCD模组
+
+### 概述
+
+k230使用DRM作为显示驱动,DRM(Direct Rendering Manager) 是 Linux 内核中的一个子系统,相比过时的Framebuffer 可以支持复杂的 GPU 操作,如硬件加速的图形渲染。lvgl可以基于libdrm提供的接口进行GUI的绘制。
+
+SDK中已经移植好lvgl组件,且默认编译了一个可以运行的demo,位于`/usr/bin/lvgl_demo_widgets`。开机后在小核linux终端输入命令`lvgl_demo_widgets`回车即可体验。
+
+### lvgl源码位置
+
+SDK中已经包含移植好的lvgl,路径位于`src/little/buildroot-ext/package/lvgl`。在SDK的buildroot编译过程中会将源码放置于目录`output/k230_evb_defconfig/little/buildroot-ext/build/lvgl-v8.3.7`下,该目录包含了从github拉取的lvgl源码包以及前面所说的src路径下的移植文件。目录结构如下:
+
+```sh
+.
+├── lv_conf.h
+├── lv_drivers
+│ ├── display
+│ │ ├── drm.c
+│ │ └── drm.h
+│ ├── indev
+│ │ ├── AD_touch.c
+│ │ ├── AD_touch.h
+│ │ ├── evdev.c
+│ │ ├── evdev.h
+│ │ ├── keyboard.h
+│ │ ├── libinput.c
+│ │ ├── libinput_drv.h
+│ │ ├── mouse.h
+│ │ └── mousewheel.h
+│ └── lv_drivers.mk
+├── lv_drv_conf.h
+├── main.c
+├── Makefile
+└── mouse_cursor_icon.c
+```
+
+### lvgl的DRM驱动
+
+linux内核中DRM驱动加载成功后会出现以下节点`/dev/dri/card0`。
+
+#### DRM配置相关
+
+在头文件`src/little/buildroot-ext/package/lvgl/port_src/lv_drv_conf.h`中
+
+- 配置宏定义`define USE_DRM 1`来使能DRM显示驱动
+- 配置宏定义`define DRM_CARD "/dev/dri/card0"`指定DRM驱动节点
+
+#### DRM驱动源码具体介绍
+
+lvgl的drm驱动程序位于`src/little/buildroot-ext/package/lvgl/port_src/lv_drivers/display/drm.c`。
+对DRM的操作需要先open该文件节点。
+lvgl使用中主要用到以下几个函数:
+
+- drm_init() drm初始化。
+- drm_get_sizes() 获取显示器分辨率信息。
+- drm_flush() 显示绘制回调接口。
+
+drm初始化过程中会自动获取DRM的资源,包括获知connect id, plane id, crtc id等,会根据配置文件中选定的颜色格式自动匹配对应支持的plane。
+
+该drm驱动默认开启了双buffer,但目前在没有硬件加速的情况下,双缓冲刷新率低,可以注释掉下面代码以单缓冲方式刷新,显示效果会更好:
+
+``` c
+void drm_flush(lv_disp_drv_t *disp_drv, const lv_area_t *area, lv_color_t *color_p)
+{
+ ...
+ if (!drm_dev.cur_bufs[0])
+ drm_dev.cur_bufs[1] = &drm_dev.drm_bufs[1];
+ else
+ drm_dev.cur_bufs[1] = drm_dev.cur_bufs[0];
+ drm_dev.cur_bufs[0] = fbuf;
+ ...
+}
+```
+
+### lvgl的使用
+
+lvgl的主程序文件位于`src/little/buildroot-ext/package/lvgl/port_src/main.c`
+
+#### lvgl配置相关
+
+lvgl配置文件位于:`src/little/buildroot-ext/package/lvgl/port_src/lv_conf.h`
+
+以下是几个常用的配置项:
+
+- `#define LV_COLOR_DEPTH 32` 设置颜色深度
+- `#define LV_COLOR_SCREEN_TRANSP 1` 设置屏幕透明
+- `#define LV_DPI_DEF 300` 设置屏幕DPI
+- `#define LV_USE_PERF_MONITOR 1` 显示fps以及cpu占用率,用于调试
+- `#define LV_USE_MEM_MONITOR 1` 显示内存占用,用于调试
+- `#define LV_USE_DEMO_WIDGETS 1` 启用lvgl widgets demo
+
+#### lvgl使用的主要步骤
+
+1. LVGL初始化:
+
+ `lv_init();`
+
+1. 显示驱动初始化:
+
+ ``` c
+ drm_init();
+ drm_get_sizes(&lcd_w, &lcd_h, &lcd_dpi);
+ printf("lcd w,h,dpi:%d,%d,%d \n", lcd_w, lcd_h, lcd_dpi);
+
+ uint32_t draw_buf_size = lcd_w * lcd_h * sizeof(lv_color_t) / 4; /*1/4 screen sized buffer has the same performance */
+ static lv_disp_draw_buf_t disp_buf;
+ lv_color_t *buf_2_1 = malloc(draw_buf_size);
+ lv_color_t *buf_2_2 = malloc(draw_buf_size);
+ lv_disp_draw_buf_init(&disp_buf, buf_2_1, buf_2_2, draw_buf_size);
+
+ /*Initialize and register a display driver*/
+ static lv_disp_drv_t disp_drv;
+ lv_disp_drv_init(&disp_drv);
+ disp_drv.draw_buf = &disp_buf;
+ disp_drv.flush_cb = drm_flush;
+ disp_drv.hor_res = lcd_w;
+ disp_drv.ver_res = lcd_h;
+ disp_drv.screen_transp = 1;
+ lv_disp_drv_register(&disp_drv);
+ ```
+
+1. 触摸驱动:
+
+ ``` c
+ evdev_init();
+ static lv_indev_drv_t indev_drv_1;
+ lv_indev_drv_init(&indev_drv_1); /*Basic initialization*/
+ indev_drv_1.type = LV_INDEV_TYPE_POINTER;
+
+ /*This function will be called periodically (by the library) to get the mouse position and state*/
+ indev_drv_1.read_cb = evdev_read;
+ lv_indev_t *mouse_indev = lv_indev_drv_register(&indev_drv_1);
+ ```
+
+1. demo例程:
+
+ `lv_demo_widgets();`
+
+关于lvgl更详细的用法请参考lvgl官网:`https://lvgl.io`,API文档以及例程:`https://docs.lvgl.io/8.3/index.html`。
+
+也可以使用lvgl的拖放式UI编辑器SquareLine Studio来简化开发:`https://squareline.io`。
+
+### 编译
+
+在SDK根目录下执行`make`默认全部编译。
+
+### 运行lv_demo_widgets
+
+ ```sh
+lvgl_demo_widgets
+ ```
+
+执行完上述命令,会在LCD屏幕上显示配置界面,可以通过触摸屏进行相关配置,具体如下所示:
+
+
+
+当然lvgl应用程序开发也可以作为一个独立项目而不是在SDK中进行编译,可以参考`https://github.com/lvgl/lv_port_linux_frame_buffer`项目将SDK中的移植文件替换进去,然后配置K230的交叉编译工具链以及对应libdrm引用即可。
diff --git "a/zh/02_applications/tutorials/K230_RVV\345\256\236\346\210\230.md" "b/zh/02_applications/tutorials/K230_RVV\345\256\236\346\210\230.md"
new file mode 100755
index 0000000..a06c931
--- /dev/null
+++ "b/zh/02_applications/tutorials/K230_RVV\345\256\236\346\210\230.md"
@@ -0,0 +1,155 @@
+# K230 RVV实战
+
+
+
+版权所有©2023北京嘉楠捷思信息技术有限公司
+
+
+
+## 免责声明
+
+您购买的产品、服务或特性等应受北京嘉楠捷思信息技术有限公司(“本公司”,下同)及其关联公司的商业合同和条款的约束,本文档中描述的全部或部分产品、服务或特性可能不在您的购买或使用范围之内。除非合同另有约定,本公司不对本文档的任何陈述、信息、内容的正确性、可靠性、完整性、适销性、符合特定目的和不侵权提供任何明示或默示的声明或保证。除非另有约定,本文档仅作为使用指导参考。
+
+由于产品版本升级或其他原因,本文档内容将可能在未经任何通知的情况下,不定期进行更新或修改。
+
+## 商标声明
+
+、“嘉楠”和其他嘉楠商标均为北京嘉楠捷思信息技术有限公司及其关联公司的商标。本文档可能提及的其他所有商标或注册商标,由各自的所有人拥有。
+
+**版权所有 © 2023北京嘉楠捷思信息技术有限公司。保留一切权利。**
+非经本公司书面许可,任何单位和个人不得擅自摘抄、复制本文档内容的部分或全部,并不得以任何形式传播。
+
+
+
+## 概述
+
+提高数据并行性的一种方式是向量计算技术,Riscv使用了这项技术。 K230 采用的是玄铁C908双核处理器,其中大核C908带了RVV1.0扩展,本文描述了如何在大核rt-smart上使用rvv功能
+
+## 环境准备
+
+### 硬件环境
+
+- K230-UNSIP-LP3-EVB-V1.0/K230-UNSIP-LP3-EVB-V1.1
+
+### 软件环境
+
+k230_SDK
+
+## 使用RVV功能
+
+### 源码位置
+
+`src/big/unittest/testcases/rvv_utest`
+
+### 编译
+
+在k230_sdk目录下运行
+
+``` shell
+make rt-smart-apps
+```
+
+进入目录 `src/big/rt-smart` 运行脚本 `source smart-env.sh riscv64` 配置环境变量。
+
+```shell
+$ source smart-env.sh riscv64
+Arch => riscv64
+CC => gcc
+PREFIX => riscv64-unknown-linux-musl-
+EXEC_PATH => /home/testUser/k230_sdk/src/big/rt-smart/../../../toolchain/riscv64-linux-musleabi_for_x86_64-pc-linux-gnu/bin
+```
+
+进入`userapps/testcases/rvv_utest`目录运行`scons`编译
+
+``` shell
+$ cd userapps/testcases/rvv_utest
+$ scons
+scons: Reading SConscript files ...
+scons: done reading SConscript files.
+scons: Building targets ...
+scons: building associated VariantDir targets: build/rvv_utest
+CC build/rvv_utest/rvv_utest.o
+LINK rvv_utest.elf
+/home/testUser/k230_sdk/toolchain/riscv64-linux-musleabi_for_x86_64-pc-linux-gnu/bin/../lib/gcc/riscv64-unknown-linux-musl/12.0.1/../../../../riscv64-unknown-linux-musl/bin/ld: warning: rvv_utest.elf has a LOAD segment with RWX permissions
+```
+
+之后即可将编译完成的rvv_utest.elf拷贝到sharefs内运行
+
+``` shell
+msh /sharefs>./rvv_utest.elf
+enter thread run [1] times
+enter thread run [67] times
+enter thread run [96] times
+enter thread run [56] times
+enter thread run [89] times
+enter thread run [51] times
+enter thread run [55] times
+enter thread run [1] times
+enter thread run [29] times
+enter thread run [53] times
+vadd_test check passed
+```
+
+在源码目录下使用objdump工具反编译可确认是否产生了vector指令
+
+``` text
+$ riscv64-unknown-linux-musl-objdump -D rvv_utest.elf | grep 'vadd'
+0000000200002b48 :
+ 200002b48: 04d05e63 blez a3,200002ba4
+ 200002b5c: 04f76563 bltu a4,a5,200002ba6
+ 200002b68: 02f87363 bgeu a6,a5,200002b8e
+ 200002b7c: 038c8c57 vadd.vv v24,v24,v25
+ 200002b8a: f2ed bnez a3,200002b6c
+ 200002ba0: feb699e3 bne a3,a1,200002b92
+ 200002ba8: bf65 j 200002b60
+0000000200002baa :
+ 200002c36: f13ff0ef jal ra,200002b48
+ 200002c3e: a835 j 200002c7a
+ 200002c5c: 00f70a63 beq a4,a5,200002c70
+ 200002c84: fae7dee3 bge a5,a4,200002c40
+ 200002cd0: edbff0ef jal ra,200002baa
+ 90: 00000d57 vadd.vv v26,v0,v0,v0.t
+ 1b6: 00000157 vadd.vv v2,v0,v0,v0.t
+ 24a: 007c0357 vadd.vv v6,v7,v24,v0.t
+ 2a0: 000006d7 vadd.vv v13,v0,v0,v0.t
+ 360: 00000c57 vadd.vv v24,v0,v0,v0.t
+ b14: 00000d57 vadd.vv v26,v0,v0,v0.t
+```
+
+### 源码简介
+
+``` C
+void __attribute__((noinline, noclone, optimize(3)))
+vadd (int *dst, int *op1, int *op2, int count)
+{
+ for (int i = 0; i < count; ++i)
+ dst[i] = op1[i] + op2[i];
+}
+
+#define ELEMS 10
+
+int vadd_test(void)
+{
+ int in1[ELEMS] = { 1, 2, 3, 4, 5, 6, 7, 8, 9, 10 };
+ int in2[ELEMS] = { 2, 3, 4, 5, 6, 7, 8, 9, 10, 11 };
+ int out[ELEMS];
+ int check[ELEMS] = { 3, 5, 7, 9, 11, 13, 15, 17, 19, 21 };
+
+ vadd (out, in1, in2, ELEMS);
+
+ for (int i = 0; i < ELEMS; ++i)
+ {
+ if (out[i] != check[i]) {
+ printf("check error\n");
+ __builtin_abort();
+ }
+ }
+ return 0;
+}
+```
+
+vadd_test函数中预先计算了俩个数组(in1 in2)的和作为校验结果,之后使用vadd函数做数组加法。vadd函数在定义时添加了optimize(3)的属性设置,该函数将使用O3编译。
+之后编译器会将数组加法优化为向量指令计算。
+`src/big/rt-smart/tools/riscv64.py`文件内定义了编译参数可使用V指令扩展优化。
+
+DEVICE = ' -mcmodel=medany -march=rv64imafdc`v` -mabi=lp64d'
diff --git "a/zh/02_applications/tutorials/K230_USB\345\272\224\347\224\250\345\256\236\346\210\230_UVC\344\274\240\350\276\223YUV\345\217\212\347\274\226\347\240\201\347\240\201\346\265\201.md" "b/zh/02_applications/tutorials/K230_USB\345\272\224\347\224\250\345\256\236\346\210\230_UVC\344\274\240\350\276\223YUV\345\217\212\347\274\226\347\240\201\347\240\201\346\265\201.md"
new file mode 100755
index 0000000..1179e95
--- /dev/null
+++ "b/zh/02_applications/tutorials/K230_USB\345\272\224\347\224\250\345\256\236\346\210\230_UVC\344\274\240\350\276\223YUV\345\217\212\347\274\226\347\240\201\347\240\201\346\265\201.md"
@@ -0,0 +1,280 @@
+# K230 USB应用实战-UVC传输YUV及编码码流
+
+
+
+版权所有©2023北京嘉楠捷思信息技术有限公司
+
+
+
+## 免责声明
+
+您购买的产品、服务或特性等应受北京嘉楠捷思信息技术有限公司(“本公司”,下同)及其关联公司的商业合同和条款的约束,本文档中描述的全部或部分产品、服务或特性可能不在您的购买或使用范围之内。除非合同另有约定,本公司不对本文档的任何陈述、信息、内容的正确性、可靠性、完整性、适销性、符合特定目的和不侵权提供任何明示或默示的声明或保证。除非另有约定,本文档仅作为使用指导参考。
+
+由于产品版本升级或其他原因,本文档内容将可能在未经任何通知的情况下,不定期进行更新或修改。
+
+## 商标声明
+
+、“嘉楠”和其他嘉楠商标均为北京嘉楠捷思信息技术有限公司及其关联公司的商标。本文档可能提及的其他所有商标或注册商标,由各自的所有人拥有。
+
+**版权所有 © 2023北京嘉楠捷思信息技术有限公司。保留一切权利。**
+非经本公司书面许可,任何单位和个人不得擅自摘抄、复制本文档内容的部分或全部,并不得以任何形式传播。
+
+
+
+## 概述
+
+本文将讲解如何在k230开发板上实现USB摄像头功能。也就是把K230 开发板连接到电脑,电脑可以通过播放器播放K230摄像头采集到的图像。
+
+## 1. 环境准备
+
+### 1.1 硬件环境
+
+- K230-UNSIP-LP3-EVB-V1.0/K230-UNSIP-LP3-EVB-V1.1
+- Ubuntu PC 20.04
+- Typec USB线 * 1 至少
+- USB TypeC转以太网(如果使用TFTP加载和NFS文件系统)
+- 网线一根
+- SD卡(如果使用SD卡启动,或软件需要访问SD卡)
+
+### 1.2 软件环境
+
+k230_sdk中提供了工具链,分别在如下路径。
+
+- 大核rt-samrt工具链
+
+``` shell
+k230_sdk/toolchain/riscv64-linux-musleabi_for_x86_64-pc-linux-gnu
+```
+
+- 小核linux工具链
+
+``` shell
+k230_sdk/toolchain/Xuantie-900-gcc-linux-5.10.4-glibc-x86_64-V2.6.0
+```
+
+也可通过以下链接下载工具链
+
+``` shell
+wget https://download.rt-thread.org/rt-smart/riscv64/riscv64-unknown-linux-musl-rv64imafdcv-lp64d-20230222.tar.bz2
+wget https://occ-oss-prod.oss-cn-hangzhou.aliyuncs.com/resource//1659325511536/Xuantie-900-gcc-linux-5.10.4-glibc-x86_64-V2.6.0-20220715.tar.gz
+```
+
+## 2. SDK UVC demo体验
+
+### 2.1 release sdk编译固件,烧录固件
+
+参考 [K230_SDK_使用说明](../../01_software/board/K230_SDK_使用说明.md) 2/3/4/5章节描述
+
+### 2.2 执行命令测试demo
+
+参考 [K230_SDK_Demo使用指南](../../01_software/board/examples/K230_SDK_Demo使用指南.md) 2.9 UVC_demo 章节
+
+## 3. 如何开发UVC功能
+
+### 3.1 USB/UVC协议
+
+### 3.1.1 USB协议
+
+USB协议内容比较多,是用得非常普遍的接口,互联网上资料很多。本文只描述一些我认为有助于对USB协议理解的点。
+
+USB2.0有4条线,VBUS/GND/D+/D-,差分信号传输。低速/全速使用3.3V电压,高速使用400mV电压。除了传递数据的差分0/1信号外,其他的一些电压组合可以用来作为速度识别,空闲、复位、唤醒等信号。
+
+PHY可以理解为做一个并转串的操作,把UTMI+信号转成D+/D-的差分信号。
+
+
+
+理论上两条数据信号完全可以使用gpio来进行控制,只是协议太复杂,且gpio的变化速度太慢。无论是SPI/SDIO/UART/IIC等等这些接口控制器都是这样,控制器尽可能提供给软件必要的接口,且让软件做尽可能少的操作。USB控制器也就是把协议的功能尽可能让硬件来做,比如速度协商,收到数据包后自动产生应答包等等功能。提供一些寄存器接口告知软件当前USB通信的状态。当然最重要的是提供传输数据的接口,让软件可以收发不同的数据,收发数据一般都会使用DMA。
+
+USB传输数据是以包为基本单位的。下图为包的构成
+
+
+
+PID决定了包的类型,令牌包、数据包、握手包和特殊包,不同的包类型包含的字段成分不一样,比如数据包只包含PID+数据+CRC,握手包只有PID。
+
+包组成了事务,令牌包+数据包(可选)+握手包(可选)。下图使用南京沁恒出的USB2.0高速总线分析仪捕获的USB交互信息,如果想捕获USB线上的数据比较推荐这款仪器。
+
+
+
+可以看到前面是枚举传输,包含SETUP事务,数据IN/OUT事务,状态IN/OUT事务。后面是同步传输,包含数据IN事务。
+
+传输是由单次或多次事务组成,有4种传输类型:
+
+控制传输-在枚举阶段使用,所有的USB设备连接主机时,都需要一套统一的协议去识别各种USB设备类型。USB控制器初始阶段会让0端点为双向控制端点。
+
+
+
+中断传输-小数据量和不连续,且实时性要求高的场合。比如鼠标键盘。
+
+
+
+同步传输-数据量大、连续,且要求实时性的场合。比如USB摄像头设备。
+
+
+
+批量传输-用于数据量大,但没有实时性要求的场合。比如U盘设备。
+
+
+
+无论是什么样的USB设备协议,都是通过这4种传输来实现的。所以像linux这样的操作系统的USB协议栈,提供了这4种传输方式的接口。
+
+### 3.1.2 UVC协议
+
+### 3.1.2.1 UVC描述符
+
+USB的描述符用于让主机知道设备的属性信息。设备刚连接主机时,主机会发送所有设备都支持的请求命令。通用的描述符包含设备描述符、配置描述符、接口描述符、端点描述符、字符串描述符。不同的设备类型可能会定义特有的描述符,用于对设备的描述扩展。
+
+windows上可以使用UsbTreeView软件查看USB设备的描述符。下图展示了一个UVC设备其描述符的整体布局。
+
+
+
+在该布述符布局中,首先第一项是设备描述符,其次是配置描述符,该设备拥有一个配置描述符。配置描述符后接一个接口关联描述符IAD,接口关联描述符IAD拥有一个视频控制接口VC和N个视频流接口。
+
+视频控制接口包括视视频控制接口头描述符、输入终端描述符、处理单元描述符、编码单元描述符、输出终端描述符、中断断点描述符。
+
+视频流接口中包括一个接口和与其对应的多个转换设置接口(Alternate Setting)。
+
+主机端通过视频控制接口描述符,可以知晓UVC摄像头的拓扑结构,并进行控制。比如处理单元PU,包括背光、对比度、色度等等调节,主机端先通过描述符获知哪些是可调节项,然后再与UVC设备交互获知控制范围信息。
+
+
+
+### 3.1.2.2 UVC视频流格式选择
+
+VS接口包含许多Format(YUV/MJPEG/H264等),每个Format包含多个Frame(各种分辨率)。参数设置的过程需要主机和USB设备进行协商, 协商的过程大致如下图所示:
+
+
+
+流程说明:
+
+- Host 先将期望的设置发送给USB设备(PROBE)
+- 设备将Host期望设置在自身能力范围之内进行修改,返回给Host(PROBE)
+- Host 认为设置可行的话,Commit 提交(COMMIT)
+- 设置接口的当前设置为某一个设置
+
+### 3.1.2.3 UVC视频流负载
+
+
+
+可以看到payload data前面包含一个header,payload data包含多个USB包,主机端是如何识别一帧图像数据的呢?通过payload header来识别。
+
+payload header固定前2字节和后面的扩展部分。重点关注FID-不同的格式规定有差异。但所有的格式都是使用该bit在0和1之间切换来识别新一帧图像数据的。
+
+
+
+### 3.2 linux驱动层
+
+K230的SDK设计,为了性能把视频音频功能放在大核RTT上。linux上USB的功能实现很成熟,所以基于linux开发UVC功能,通过核间mapi通信获取大核视频数据。
+
+
+
+### 3.2.1 控制器驱动
+
+
+
+K230集成了新思科技的USB模块,linux/drivers/usb/dwc2目录为该控制器的驱动。
+
+目前的SDK设计UVC固定使用USB1,otg通过ID信号识别为device模式。
+
+platform.c,做一些复位,注册中断,配置参数等操作。SDK的USB默认支持buffer DMA模式。Scatter Gather DMA模式可以提升ISO传输性能,HOST模式使用该DMA模式不能支持HUB。
+
+gadget.c,重点关注该驱动代码,dwc2_gadget_init初始化重要的结构体,gadget.ops和ep.ops。usb_ep_ops的queue就是提交数据收发的请求,实际上是把这个请求放到一个处理链表。USB会挨个处理这些链表上的请求然后上报完成回调。
+
+``` c
+//设备树
+usbotg1: usb-otg@91540000 {
+ compatible = "kendryte,k230-otg";
+ reg = <0x0 0x91540000 0x0 0x10000>;
+ interrupt-parent = <&intc>;
+ interrupts = <174>;
+ g-rx-fifo-size = <512>;
+ g-np-tx-fifo-size = <64>;
+ g-tx-fifo-size = <512 1024 64 64 64 64>;
+ dr_mode = "otg";
+ otg-rev = <0x200>;
+};
+```
+
+### 3.2.2 gadget驱动
+
+源码位于linux/drivers/usb/gadget
+
+- legacy:整个Gadget 设备驱动的入口。位于driver/usb/gadget/legacy下,里面给出了常用的usb类设备的驱动sample。其作用就是配置USB设备描述符信息,提供一个usb_composite_driver, 然后注册到composite层。也可以通过functionfs动态创建,这种方式更灵活,K230提供的usb gadget demo都是采用这种方式。
+- functions:各种usb 子类设备功能驱动。位于driver/usb/gadget/functions,里面也给出了对应的sample。其作用是配置USB子类协议的接口描述以及其他子类协议,比如uvc协议,hid等。uvc涉及到的相关文件uvc_video.c、uvc_v4l2.c、uvc_queue.c、uvc_configfs.c、f_uvc.c
+
+K230的UVC几乎未对gadget驱动层做修改,仅仅是移植了支持H264格式功能和扩展单元。
+
+linux编译内核添加USB Gadget框架
+
+``` shell
+-> Device Drivers
+ -> USB support
+ -> USB Gadget Support
+```
+
+
+
+
+
+uvc涉及到v4l2模块的功能,还需要添加media框架
+
+``` shell
+-> Device Drivers
+ -> Multimedia support
+ -> Media core support
+ -> Media core support
+```
+
+
+
+### 3.3 uvc-gadget应用层
+
+从K230的SDK设计架构可以看到,K230的UVC功能与单纯的linux上的uvc功能的差别就是获取视频数据的方式是通过核间通信从大核RTT获取的。
+
+K230 UVC应用层的代码位置:cdk/user/mapi/sample/camera
+
+源代码文件描述:
+
+application.c - 主函数
+
+camera.c - 提供摄像头对象操作,可以包含uvc/uac的控制
+
+frame_cache.c - 复杂buffer的管理
+
+kstream.c - 实现视频流操作
+
+kuvc.c - 实现kuvc对象操作
+
+sample_venc.c - 通过mapi从大核获取编码图像的操作
+
+sample_yuv.c - 通过mapi从大核获取YUV图像的操作
+
+uvc-gadget.c - 实现uvc设备操作
+
+调试的步骤是先移植linux上通用的uvc_app,在linux上跑通standalone功能,也就是播放固定图像数据。然后再调试播放真实摄像头图像数据的功能。
+
+下面是K230 UVC APP的设计流程图
+
+
+
+uvc app大部分操作都是通用的操作,互联网上资料比较多。这里说一下K230私有的操作,重点关注venc_normalp_classic函数的处理。
+
+- 首先配置vicap 设备属性信息,包括摄像头类型等
+kd_mapi_vicap_set_dev_attr
+- 获取摄像头信息,主要是获取摄像头输出的图像分辨率 k_vicap_sensor_info
+- 根据需要从vicap输出的图像计算出需要的vb buffer大小,并分配好buffer kd_mapi_media_init
+- 配置通道属性,包括输出的分辨率,格式等 kd_mapi_vicap_set_chn_attr
+- 启动video处理 kd_mapi_vicap_start
+ - 获取一帧图像 kd_mapi_vicap_dump_frame
+ - 释放图像 buffer kd_mapi_vicap_release_frame
+- 初始化venc模块,包括编码格式,帧率,分辨率等等 kd_mapi_venc_init
+- 注册编码完成后的回调函数 kd_mapi_venc_registercallback
+- 使能H264 GOP间隔产生IDR帧 kd_mapi_venc_enable_idr
+- 启动venc kd_mapi_venc_start
+- venc模块绑定vi模块 kd_mapi_venc_bind_vi
+ - 编码完成后的回调函数,获取编码后的图像数据 get_venc_stream
+
+### 3.4 参考资料学习推荐
+
+- [USB2.0官方文档下载](https://www.usb.org/document-library/usb-20-specification)
+- [UUV1.1官方文档下载](https://www.usb.org/document-library/video-class-v11-document-set)
+- [UUV1.5官方文档下载](https://www.usb.org/document-library/video-class-v15-document-set)
+- [USB中文网](https://www.usbzh.com/article/forum-12.html)
diff --git "a/zh/02_applications/tutorials/K230_\345\233\276\345\203\217\345\256\236\346\210\230_\345\274\200\346\234\272\350\247\206\351\242\221\345\222\214\345\274\200\346\234\272logo.md" "b/zh/02_applications/tutorials/K230_\345\233\276\345\203\217\345\256\236\346\210\230_\345\274\200\346\234\272\350\247\206\351\242\221\345\222\214\345\274\200\346\234\272logo.md"
new file mode 100755
index 0000000..292c161
--- /dev/null
+++ "b/zh/02_applications/tutorials/K230_\345\233\276\345\203\217\345\256\236\346\210\230_\345\274\200\346\234\272\350\247\206\351\242\221\345\222\214\345\274\200\346\234\272logo.md"
@@ -0,0 +1,106 @@
+# K230 图像实战 - 开机视频和开机logo
+
+
+
+版权所有©2023北京嘉楠捷思信息技术有限公司
+
+
+
+## 免责声明
+
+您购买的产品、服务或特性等应受北京嘉楠捷思信息技术有限公司(“本公司”,下同)及其关联公司的商业合同和条款的约束,本文档中描述的全部或部分产品、服务或特性可能不在您的购买或使用范围之内。除非合同另有约定,本公司不对本文档的任何陈述、信息、内容的正确性、可靠性、完整性、适销性、符合特定目的和不侵权提供任何明示或默示的声明或保证。除非另有约定,本文档仅作为使用指导参考。
+
+由于产品版本升级或其他原因,本文档内容将可能在未经任何通知的情况下,不定期进行更新或修改。
+
+## 商标声明
+
+、“嘉楠”和其他嘉楠商标均为北京嘉楠捷思信息技术有限公司及其关联公司的商标。本文档可能提及的其他所有商标或注册商标,由各自的所有人拥有。
+
+**版权所有 © 2023北京嘉楠捷思信息技术有限公司。保留一切权利。**
+非经本公司书面许可,任何单位和个人不得擅自摘抄、复制本文档内容的部分或全部,并不得以任何形式传播。
+
+
+
+## 概述
+
+本文将讲解如何通过视频解码在k230 evb开发板上实现开机视频和开机logo。
+视频解码模块支持H.264/H.265/MJPEG解码,屏幕显示最大分辨率为1920x1080,可旋转。
+
+## 1. 环境准备
+
+### 1.1 硬件环境
+
+- K230-USIP-LP3-EVB-V1.0/K230-UNSIP-LP3-EVB-V1.1
+- Typec USB线,用于供电。
+- SD卡
+- 屏幕及连线
+- 摄像头子板(IMX335)
+
+### 1.2 软件环境
+
+k230_sdk中提供了工具链,分别在如下路径。
+
+- 大核rt-samrt工具链
+
+``` shell
+k230_sdk/toolchain/riscv64-linux-musleabi_for_x86_64-pc-linux-gnu
+```
+
+- 小核linux工具链
+
+``` shell
+k230_sdk/toolchain/Xuantie-900-gcc-linux-5.10.4-glibc-x86_64-V2.6.0
+```
+
+也可通过以下链接下载工具链
+
+``` shell
+wget https://download.rt-thread.org/rt-smart/riscv64/riscv64-unknown-linux-musl-rv64imafdcv-lp64d-20230222.tar.bz2
+wget https://occ-oss-prod.oss-cn-hangzhou.aliyuncs.com/resource//1659325511536/Xuantie-900-gcc-linux-5.10.4-glibc-x86_64-V2.6.0-20220715.tar.gz
+```
+
+## 2. 源码位置
+
+SDK中包含一个用户态解码demo,路径位于`k230_sdk/src/big/mpp/userapps/sample/sample_vdec`。编译生成的可执行文件在`k230_sdk/src/big/mpp/userapps/sample/elf/sample_vdec.elf`,默认没有加载到大核镜像中,需要按照执行方式章节修改Makefile才能在大核启动后的`/mnt`目录中生成可执行文件。
+
+## 源码解析
+
+1. `sample_vb_init`:配置vb pool cnt,并初始化vb。
+1. `vb_create_pool`:配置vb总各个pool的block大小和个数。
+1. `kd_mpi_vdec_create_chn`:创建解码通道。
+1. `kd_mpi_vdec_start_chn`:开启解码通道。
+1. `sample_vdec_bind_vo`:将解码绑定到vo。
+1. `input_thread`:从文件中读取数据,并调用`kd_mpi_vdec_send_stream`将数据送给VPU。
+1. `output_thread`:从VPU获取解码数据。
+
+## 3. 程序执行
+
+1. 修改`k230_sdk/Makefile`中`mpp-apps`的编译脚本。
+ 将
+
+ ```sh
+ cp userapps/sample/fastboot_elf/* $(RTSMART_SRC_DIR)/userapps/root/bin/; \
+ ```
+
+ 改为
+
+ ```sh
+ cp userapps/sample/elf/sample_vdec.elf $(RTSMART_SRC_DIR)/userapps/root/bin/; \
+ ```
+
+1. 将需要显示的H.264/H.265/MJPEG/JPEG文件拷贝到`k230_sdk/src/big/rt-smart/userapps/root/bin`目录中
+
+1. 修改`k230_sdk/src/big/rt-smart/init.sh`为如下命令:
+
+ ```sh
+ /bin/sample_vdec -i [-t ]
+ ```
+
+ - ``为上一步中拷贝的视频文件
+ - `-t`仅在显示图片时使用,为显示图片的时间。
+
+1. 在`k230_sdk`目录下执行`make`命令。
+1. 将编译生成的`k230_sdk/output/k230_evb_defconfig/images/sysimage-sdcard.img`烧写到SD卡中,EVB板拨码开关全拨到OFF(从SD卡启动),即可实现开机显示视频。
+
+显示效果如下:
+
diff --git "a/zh/02_applications/tutorials/K230_\345\233\276\345\203\217\351\207\207\351\233\206\345\256\236\346\210\230_\345\246\202\344\275\225\346\224\257\346\214\201\344\270\200\346\254\276\346\226\260sensor.md" "b/zh/02_applications/tutorials/K230_\345\233\276\345\203\217\351\207\207\351\233\206\345\256\236\346\210\230_\345\246\202\344\275\225\346\224\257\346\214\201\344\270\200\346\254\276\346\226\260sensor.md"
new file mode 100755
index 0000000..e016304
--- /dev/null
+++ "b/zh/02_applications/tutorials/K230_\345\233\276\345\203\217\351\207\207\351\233\206\345\256\236\346\210\230_\345\246\202\344\275\225\346\224\257\346\214\201\344\270\200\346\254\276\346\226\260sensor.md"
@@ -0,0 +1,392 @@
+# K230图像采集实战 如何支持一款新sensor
+
+
+
+版权所有©2023北京嘉楠捷思信息技术有限公司
+
+
+
+## 免责声明
+
+您购买的产品、服务或特性等应受北京嘉楠捷思信息技术有限公司(“本公司”,下同)及其关联公司的商业合同和条款的约束,本文档中描述的全部或部分产品、服务或特性可能不在您的购买或使用范围之内。除非合同另有约定,本公司不对本文档的任何陈述、信息、内容的正确性、可靠性、完整性、适销性、符合特定目的和不侵权提供任何明示或默示的声明或保证。除非另有约定,本文档仅作为使用指导参考。
+
+由于产品版本升级或其他原因,本文档内容将可能在未经任何通知的情况下,不定期进行更新或修改。
+
+## 商标声明
+
+、“嘉楠”和其他嘉楠商标均为北京嘉楠捷思信息技术有限公司及其关联公司的商标。本文档可能提及的其他所有商标或注册商标,由各自的所有人拥有。
+
+**版权所有 © 2023北京嘉楠捷思信息技术有限公司。保留一切权利。**
+非经本公司书面许可,任何单位和个人不得擅自摘抄、复制本文档内容的部分或全部,并不得以任何形式传播。
+
+
+
+## 目录
+
+[TOC]
+
+## 前言
+
+### 概述
+
+本文档主要描述K230平台Camera Sensor框架以及如何新增支持一款新的Camera Sensor。
+
+### 读者对象
+
+本文档(本指南)主要适用于以下人员:
+
+- 技术支持工程师
+- 软件开发工程师
+
+### 缩略词定义
+
+| 简称 | 说明 |
+| ---- | ---- |
+| | |
+| | |
+
+### 修订记录
+
+| 文档版本号 | 修改说明 | 修改者 | 日期 |
+|---|---|---|---|
+| V1.0 | 初版 | 汪成根 | 2023-06-28 |
+| | | | |
+| | | | |
+
+## 1. 概述
+
+本文档主要描述K230平台Camera Sensor基本框架以及如何新增支持一款新的Camera Sensor。
+
+K230平台支持多种接口类型的sensor,我们以当前最常用的MIPI CSI接口Sensor为例进行说明。Sensor与主控平台的硬件连接示意图如下:
+
+
+
+主控通过I2C接口下发配置寄存器控制sensor的工作方式,sensor通过MIPI CSI接口将图像数据发送至主控SOC。
+
+## 2. Camera Sensor框架
+
+### 2.1 框架简介
+
+Camera Sensor框架如图2-1所示,最底层是sensor驱动层
+
+
+
+图2-1 camera sensor框架
+
+从上到下依次是:媒体接口层,驱动层以及硬件层
+
+- 媒体接口层:该层向上提供kd_mpi_sensor_xxx接口给外部模块操作和访问sensor设备,向下通过ioctl命令操作具体的sensor设备
+- 驱动层:该层包括sensor公共操作接口具体的sensor设备驱动。公共操作接口主要是ioctl操作命令和sensor i2c读写接口,sensor驱动主要提供设备节点以及操作接口的实现。这部分也是sensor适配的主要工作。
+- 硬件层:对应各个具体的sensor硬件
+
+## 3. Sensor适配准备工作
+
+用户在适配新的sensor之前需要做以下一些准备工作:
+
+1. 从正规渠道获取 Sensor datasheet、初始化序列。
+1. 查看 Sensor datasheet 和相关应用手册,特别关注 Sensor 曝光、增益控制方法,不同模式下曝光和增益的限制,长曝光实现方法,黑电平值,bayer 数据输出顺序等。
+1. 跟 Sensor 厂家索要所需模式初始化序列,了解各序列的数据数率,Sensor 输出总的宽高,精确的帧率是多少等。
+1. 确认 Sensor 控制接口是 I2C、SPI 还是其他接口,Sensor 的设备地址可以通过硬件设置。对于多个摄像头的场景,sensor 尽量不要复用 I2C 总线。不同场景的Sensor IO 电平可能是 1.8V 或者 3.3V,设计时需要保证 sensor 的 IO 电平与SOC 对应的 GPIO 供电电压一致。如 sensor 电平是 1.8V,则用于 sensor 控制的GPIO,如 Reset,I2C,PRDN,需要使用 1.8V 供电。
+1. 确认 Sensor 输出数据接口和协议类型。当前仅支持MIPI CSI接口。
+1. 确认 wdr mode 是 VC、DT 或者 DOL 等。
+1. 确认不同时序是否需要图像裁剪。
+
+## 4. Sensor适配示例
+
+本节将按照如何增加支持一个新的camera sensor的步骤来进行详细描述。
+
+这里以ov9732驱动作为示例进行说明,对应的驱动文件源码路径如下:
+
+```shell
+src/big/mpp/kernel/sensor/src/ov9732_drv.c
+```
+
+### 4.1 定义支持的sensor类型
+
+系统支持的Sensor类型是由如下枚举变量定义:
+
+```c
+typedef enum {
+ OV_OV9732_MIPI_1920X1080_30FPS_10BIT_LINEAR,
+ OV_OV9732_MIPI_1920X1080_30FPS_10BIT_HDR,
+ OV_OV9732_MIPI_1280X720_30FPS_10BIT_LINEAR,
+ OV_OV9286_MIPI_1920X1080_30FPS_10BIT_LINEAR,
+ OV_OV9286_MIPI_1920X1080_30FPS_10BIT_HDR,
+ OV_OV9286_MIPI_1280X720_30FPS_10BIT_LINEAR_IR,
+ OV_OV9286_MIPI_1280X720_30FPS_10BIT_LINEAR_SPECKLE,
+ IMX335_MIPI_2LANE_RAW12_1920X1080_30FPS_LINEAR,
+ IMX335_MIPI_2LANE_RAW12_2592X1944_30FPS_LINEAR,
+ IMX335_MIPI_4LANE_RAW12_2592X1944_30FPS_LINEAR,
+ SENSOR_TYPE_MAX,
+} k_vicap_sensor_type;
+```
+
+用户需要增加新的sensor支持类型时,首先需要在这里增加对应类型的定义,**该类型是应用程序获取sensor配置的唯一标志**
+
+### 4.2 sensor驱动适配
+
+sensor驱动适配在整个环节中最重要的环节,用户可以通过拷贝现有的sensor驱动文件来修改,其中关于sensor的AE相关寄存器配置和计算方式需要查看对应的手册或者寻求专业人事协助。
+
+#### 4.2.1 定义sensor寄存器配置列表
+
+sensor寄存器配置由数据类型 k_sensor_reg 定义:
+
+```c
+typedef struct {
+ k_u32 addr;
+ k_u32 val;
+} k_sensor_reg;
+```
+
+以下是ov9732的寄存器配置列表
+
+```c
+static k_sensor_reg ov9732_mipi2lane_720p_30fps_linear[] = {
+ {0x0103, 0x01},
+ {0x0100, 0x00},
+
+ ......
+
+ {0x400b, 0xc0},
+ {REG_NULL, 0x00},
+};
+```
+
+#### 4.2.2 定义sensor支持的模式
+
+sensor的模式参数由数据类型k_sensor_mode 定义
+
+```c
+typedef struct {
+ k_u32 index;
+ k_vicap_sensor_type sensor_type;
+ k_sensor_size size;
+ k_u32 fps;
+ k_u32 hdr_mode;
+ k_u32 stitching_mode;
+ k_u32 bit_width;
+ k_sensor_data_compress compress;
+ k_u32 bayer_pattern;
+ k_sensor_mipi_info mipi_info;
+ k_sensor_ae_info ae_info;
+ k_sensor_reg *reg_list;
+ k_u32 max_fps;
+ k_sensor_clk_info *clk_info;
+} k_sensor_mode;
+```
+
+以下是ov9732的支持的模式
+
+```c
+static k_sensor_mode ov9732_mode_info[] = {
+ ......
+
+ {
+ .index = 2,
+ .sensor_type = OV_OV9732_MIPI_1280X720_30FPS_10BIT_LINEAR,
+ .size = {
+ .bounds_width = 1280,
+ .bounds_height = 720,
+ .top = 0,
+ .left = 0,
+ .width = 1280,
+ .height = 720,
+ },
+ .fps = 30000,
+ .hdr_mode = SENSOR_MODE_LINEAR,
+ .bit_width = 10,
+ .bayer_pattern = BAYER_BGGR,
+ .mipi_info = {
+ .csi_id = 0,
+ .mipi_lanes = 1,
+ .data_type = 0x2B, //RAW10
+ },
+ .reg_list = ov9732_mipi2lane_720p_30fps_linear,
+ },
+
+}
+```
+
+#### 4.2.3 实现sensor操作接口
+
+sensor的操作接口由数据类型k_sensor_function定义,用户根据实际情况实现相关的操作接口,不是所有接口都必须实现。
+
+```c
+typedef struct {
+ k_s32 (*sensor_power) (void *ctx, k_s32 on);
+ k_s32 (*sensor_init) (void *ctx, k_sensor_mode mode);
+ k_s32 (*sensor_get_chip_id)(void *ctx, k_u32 *chip_id);
+ k_s32 (*sensor_get_mode)(void *ctx, k_sensor_mode *mode);
+ k_s32 (*sensor_set_mode)(void *ctx, k_sensor_mode mode);
+ k_s32 (*sensor_enum_mode)(void *ctx, k_sensor_enum_mode *enum_mode);
+ k_s32 (*sensor_get_caps)(void *ctx, k_sensor_caps *caps);
+ k_s32 (*sensor_conn_check)(void *ctx, k_s32 *conn);
+ k_s32 (*sensor_set_stream)(void *ctx, k_s32 enable);
+ k_s32 (*sensor_get_again)(void *ctx, k_sensor_gain *gain);
+ k_s32 (*sensor_set_again)(void *ctx, k_sensor_gain gain);
+ k_s32 (*sensor_get_dgain)(void *ctx, k_sensor_gain *gain);
+ k_s32 (*sensor_set_dgain)(void *ctx, k_sensor_gain gain);
+ k_s32 (*sensor_get_intg_time)(void *ctx, k_sensor_intg_time *time);
+ k_s32 (*sensor_set_intg_time)(void *ctx, k_sensor_intg_time time);
+ k_s32 (*sensor_get_exp_parm)(void *ctx, k_sensor_exposure_param *exp_parm);
+ k_s32 (*sensor_set_exp_parm)(void *ctx, k_sensor_exposure_param exp_parm);
+ k_s32 (*sensor_get_fps)(void *ctx, k_u32 *fps);
+ k_s32 (*sensor_set_fps)(void *ctx, k_u32 fps);
+ k_s32 (*sensor_get_isp_status)(void *ctx, k_sensor_isp_status *staus);
+ k_s32 (*sensor_set_blc)(void *ctx, k_sensor_blc blc);
+ k_s32 (*sensor_set_wb)(void *ctx, k_sensor_white_balance wb);
+ k_s32 (*sensor_get_tpg)(void *ctx, k_sensor_test_pattern *tpg);
+ k_s32 (*sensor_set_tpg)(void *ctx, k_sensor_test_pattern tpg);
+ k_s32 (*sensor_get_expand_curve)(void *ctx, k_sensor_compand_curve *curve);
+ k_s32 (*sensor_get_otp_data)(void *ctx, void *data);
+} k_sensor_function;
+```
+
+以下是ov9732的支持的模式
+
+```c
+ .sensor_func = {
+ .sensor_power = ov9732_sensor_power_on,
+ .sensor_init = ov9732_sensor_init,
+ .sensor_get_chip_id = ov9732_sensor_get_chip_id,
+ .sensor_get_mode = ov9732_sensor_get_mode,
+ .sensor_set_mode = ov9732_sensor_set_mode,
+ .sensor_enum_mode = ov9732_sensor_enum_mode,
+ .sensor_get_caps = ov9732_sensor_get_caps,
+ .sensor_conn_check = ov9732_sensor_conn_check,
+ .sensor_set_stream = ov9732_sensor_set_stream,
+ .sensor_get_again = ov9732_sensor_get_again,
+ .sensor_set_again = ov9732_sensor_set_again,
+ .sensor_get_dgain = ov9732_sensor_get_dgain,
+ .sensor_set_dgain = ov9732_sensor_set_dgain,
+ .sensor_get_intg_time = ov9732_sensor_get_intg_time,
+ .sensor_set_intg_time = ov9732_sensor_set_intg_time,
+ .sensor_get_exp_parm = ov9732_sensor_get_exp_parm,
+ .sensor_set_exp_parm = ov9732_sensor_set_exp_parm,
+ .sensor_get_fps = ov9732_sensor_get_fps,
+ .sensor_set_fps = ov9732_sensor_set_fps,
+ .sensor_get_isp_status = ov9732_sensor_get_isp_status,
+ .sensor_set_blc = ov9732_sensor_set_blc,
+ .sensor_set_wb = ov9732_sensor_set_wb,
+ .sensor_get_tpg = ov9732_sensor_get_tpg,
+ .sensor_set_tpg = ov9732_sensor_set_tpg,
+ .sensor_get_expand_curve = ov9732_sensor_get_expand_curve,
+ .sensor_get_otp_data = ov9732_sensor_get_otp_data,
+ },
+```
+
+#### 4.2.4 定义sensor驱动结构体
+
+sensor驱动结构体由 struct sensor_driver_dev 定义,主要包括sensor I2C配置信息,sensor驱动名称以及sensor操作集合
+
+```c
+struct sensor_driver_dev {
+ k_sensor_i2c_info i2c_info;
+ k_u8 *sensor_name;
+ k_sensor_function sensor_func;
+ k_sensor_mode *sensor_mode;
+ k_sensor_ae_info ae_info;
+ k_s32 pwd_gpio;
+ k_s32 reset_gpio;
+};
+```
+
+ov9732驱动结构体定义及初始化内容如下:
+
+```c
+struct sensor_driver_dev ov9732_sensor_drv = {
+ .i2c_info = {
+ .i2c_bus = NULL,
+ .i2c_name = "i2c1",
+ .slave_addr = 0x36,
+ },
+ .sensor_name = "ov9732",
+ .sensor_func = {
+ .sensor_power = ov9732_sensor_power_on,
+ .sensor_init = ov9732_sensor_init,
+ .sensor_get_chip_id = ov9732_sensor_get_chip_id,
+ .sensor_get_mode = ov9732_sensor_get_mode,
+ .sensor_set_mode = ov9732_sensor_set_mode,
+ ......
+ },
+};
+```
+
+#### 4.2.5 更新sensor驱动列表
+
+将上一节定义的sensor驱动结构体添加到sensor_drv_list数组中。
+当前系统支持的sensor列表如下:
+
+```c
+struct sensor_driver_dev *sensor_drv_list[] = {
+ &ov9732_sensor_drv,
+ &ov9286_sensor_drv,
+ &imx335_sensor_drv,
+};
+```
+
+### 4.3 更新sensor配置信息列表
+
+sensor配置信息有结构体k_vicap_sensor_info定义:
+
+```shell
+typedef struct {
+ const char *sensor_name; /*sensor名字*/
+ const char *calib_file; /*sensor标定文件名*/
+ k_u16 width; /*sensor输出图像宽度*/
+ k_u16 height; /*sensor输出图像高度*/
+ k_vicap_csi_num csi_num; /*sensor硬件连接使用的CSI总线标号*/
+ k_vicap_mipi_lanes mipi_lanes; /*sensor硬件连接使用的MIPI LANE个数*/
+ k_vicap_data_source source_id; /*数据源ID*/
+ k_bool is_3d_sensor; /*是否为3D sensor*/
+
+ k_vicap_mipi_phy_freq phy_freq; /*MIPI PHY速率*/
+ k_vicap_csi_data_type data_type; /*CSI数据类型*/
+ k_vicap_hdr_mode hdr_mode; /*HDR模式*/
+ k_vicap_vi_flash_mode flash_mode; /*flash模式选择*/
+ k_vicap_vi_first_frame_sel first_frame;
+ k_u16 glitch_filter;
+ k_vicap_sensor_type sensor_type; /*sensor类型*/
+} k_vicap_sensor_info;
+```
+
+以下是ov9732对应的配置信息:
+
+```shell
+const k_vicap_sensor_info sensor_info_list[] = {
+ {
+ "ov9732",
+ "ov9732",
+ 1920,
+ 1080,
+ VICAP_CSI0,
+ VICAP_MIPI_1LANE,
+ VICAP_SOURCE_CSI0,
+ K_FALSE,
+ VICAP_MIPI_PHY_800M,
+ VICAP_CSI_DATA_TYPE_RAW10,
+ VICAP_LINERA_MODE,
+ VICAP_FLASH_DISABLE,
+ VICAP_VI_FIRST_FRAME_FS_TR0,
+ 0,
+ OV_OV9732_MIPI_1920X1080_30FPS_10BIT_LINEAR
+ },
+```
+
+用户每增加一个sensor配置模式,就需要在sensor_info_list这个结构体中增加一项对应模式的配置。
+
+### 4.4 增加sensor配置文件
+
+当前SDK版本sensor配置文件包括xml文件和json文件,文件存放路径如下:
+
+```shell
+src/big/mpp/userapps/src/sensor/config/
+```
+
+以下是ov9732对应的配置文件:
+
+```shell
+ov9732.xml ov9732_auto.json ov9732_manual.json
+```
+
+对于新增加的sensor,可以通过拷贝修改现有文件实现支持,其中的calibration和tuning参数可以通过相关工具修改导出。
diff --git "a/zh/02_applications/tutorials/K230_\345\244\247\345\260\217\346\240\270\351\200\232\350\256\257_sharefs\347\224\250\346\263\225\344\273\213\347\273\215.md" "b/zh/02_applications/tutorials/K230_\345\244\247\345\260\217\346\240\270\351\200\232\350\256\257_sharefs\347\224\250\346\263\225\344\273\213\347\273\215.md"
new file mode 100644
index 0000000..238e0ff
--- /dev/null
+++ "b/zh/02_applications/tutorials/K230_\345\244\247\345\260\217\346\240\270\351\200\232\350\256\257_sharefs\347\224\250\346\263\225\344\273\213\347\273\215.md"
@@ -0,0 +1,160 @@
+# K230大小核通讯Sharefs使用简介
+
+
+
+版权所有©2023北京嘉楠捷思信息技术有限公司
+
+
+
+## 免责声明
+
+您购买的产品、服务或特性等应受北京嘉楠捷思信息技术有限公司(“本公司”,下同)及其关联公司的商业合同和条款的约束,本文档中描述的全部或部分产品、服务或特性可能不在您的购买或使用范围之内。除非合同另有约定,本公司不对本文档的任何陈述、信息、内容的正确性、可靠性、完整性、适销性、符合特定目的和不侵权提供任何明示或默示的声明或保证。除非另有约定,本文档仅作为使用指导参考。
+
+由于产品版本升级或其他原因,本文档内容将可能在未经任何通知的情况下,不定期进行更新或修改。
+
+## 商标声明
+
+、“嘉楠”和其他嘉楠商标均为北京嘉楠捷思信息技术有限公司及其关联公司的商标。本文档可能提及的其他所有商标或注册商标,由各自的所有人拥有。
+
+**版权所有 © 2023北京嘉楠捷思信息技术有限公司。保留一切权利。**
+非经本公司书面许可,任何单位和个人不得擅自摘抄、复制本文档内容的部分或全部,并不得以任何形式传播。
+
+
+
+## 概述
+
+ShareFs通过对大小核各自/sharefs目录的访问,提供了大核访问小核文件系统的功能。在实际使用中,通常会将大核的可执行程序存放在/sharefs目录下,大核通过sharefs功能执行这些程序,方便大核上应用程序的开发和调试。
+
+## 环境准备
+
+### 硬件环境
+
+- K230-USIP-LP3-EVB-V1.0/K230-UNSIP-LP3-EVB-V1.1
+
+### 软件环境
+
+k230_SDK
+
+## 使用
+
+### sharefs运行
+
+sharefs底层依赖核间通讯的驱动组件以及上层的IPCMSG库,SDK镜像烧录后会默认开启sharefs功能,并将sd卡的最后一个分区挂载到/sharefs目录下
+
+``` shell
+/dev/mmcblk1p4 on /sharefs type vfat (rw,relatime,fmask=0022,dmask=0022,codepage=437,iocharset=iso8859-1,shortname=mixed,utf8,errors=remount-ro)
+```
+
+如果空间不够的话,可以先解除挂载,然后删除掉sd卡的最后一个分区,重新分一个更大的分区,最后重启开发板,SDK会自动执行挂载。
+
+### 文件创建写入查看
+
+在大核rt-smart的msh命令行下,可通过echo的方式在/sharefs里创建一个文件。
+
+``` shell
+msh /sharefs>echo "hello wrold" hello.txt
+```
+
+在小核linux的shell终端下可以在/sharefs中查看这个文件内容
+
+``` shell
+[root@canaan ~ ]#cd /sharefs/
+[root@canaan /sharefs ]#cat hello.txt
+hello wrold[root@canaan /sharefs ]#
+```
+
+### 文件夹创建
+
+在大核rt-smart的msh命令行下,通过mkdir创建一个目录
+
+``` shell
+msh /sharefs>mkdir test
+```
+
+在小核的linux的shell中,使用ls查看新增的目录
+
+``` shell
+[root@canaan /sharefs ]#ls
+System Volume Information hello.txt test
+```
+
+### 文件读取
+
+在小核linux的shell中,通过echo创建一个文件
+
+``` shell
+[root@canaan /sharefs ]#echo "hello world this is linux" >> linux.txt
+```
+
+在大核rt-smart的msh命令行下,使用cat查看文件内容
+
+``` shell
+msh /sharefs>cat linux.txt
+hello world this is linux
+```
+
+### 文件加载
+
+将编译好的rt-smart用户态可执行的elf文件,拷贝到小核的/sharefs目录,然后通过大核rt-smart的msh命令行来执行
+
+``` shell
+msh /sharefs>./hello.elf
+Hello world
+```
+
+### 文件删除
+
+在大核rt-smart的msh命令行下,使用rm删除文件
+
+``` shell
+
+msh /sharefs>ls
+Directory /sharefs:
+.
+..
+System Volume Information
+hello.txt 11
+linux.txt 26
+msh /sharefs>rm hello.txt
+msh /sharefs>rm linux.txt
+msh /sharefs>ls
+Directory /sharefs:
+.
+..
+System Volume Information
+msh /sharefs>
+```
+
+在小核的linux的shell中,使用ls查看删除结果
+
+``` shell
+[root@canaan /sharefs ]#ls
+System Volume Information
+```
+
+### 其他
+
+sharefs在rt-smart上支持大多数的posix文件接口操作,包括
+
+- open
+- close
+- ioctl
+- read
+- write
+- flush
+- lseek
+- stat
+- statfs
+- opendir
+- rewinddir
+- mkdir
+- rmdir
+- rename
+
+等,感兴趣的读者可自行编写文件IO读写相关的测试代码体验
+
+### 注意事项
+
+- sharefs不适合高频次实时读写的场景,例如编码存盘
+- 大核在sharefs下创建的文件,在linux上的读写可执行权限都存在
+- sharefs不适合多进程使用,即避免在大核上启动多个进程同时读写/sharefs目录下的文件
diff --git "a/zh/02_applications/tutorials/K230_\345\256\236\346\210\230\345\237\272\347\241\200\347\257\207_hello_world.md" "b/zh/02_applications/tutorials/K230_\345\256\236\346\210\230\345\237\272\347\241\200\347\257\207_hello_world.md"
new file mode 100755
index 0000000..0f7e497
--- /dev/null
+++ "b/zh/02_applications/tutorials/K230_\345\256\236\346\210\230\345\237\272\347\241\200\347\257\207_hello_world.md"
@@ -0,0 +1,198 @@
+# K230 实战基础篇 - hello world
+
+
+
+版权所有©2023北京嘉楠捷思信息技术有限公司
+
+
+
+## 免责声明
+
+您购买的产品、服务或特性等应受北京嘉楠捷思信息技术有限公司(“本公司”,下同)及其关联公司的商业合同和条款的约束,本文档中描述的全部或部分产品、服务或特性可能不在您的购买或使用范围之内。除非合同另有约定,本公司不对本文档的任何陈述、信息、内容的正确性、可靠性、完整性、适销性、符合特定目的和不侵权提供任何明示或默示的声明或保证。除非另有约定,本文档仅作为使用指导参考。
+
+由于产品版本升级或其他原因,本文档内容将可能在未经任何通知的情况下,不定期进行更新或修改。
+
+## 商标声明
+
+、“嘉楠”和其他嘉楠商标均为北京嘉楠捷思信息技术有限公司及其关联公司的商标。本文档可能提及的其他所有商标或注册商标,由各自的所有人拥有。
+
+**版权所有 © 2023北京嘉楠捷思信息技术有限公司。保留一切权利。**
+非经本公司书面许可,任何单位和个人不得擅自摘抄、复制本文档内容的部分或全部,并不得以任何形式传播。
+
+
+
+## 概述
+
+本文将讲解如果在pc端使用交叉编译工具编译一个hello world的基础程序,并在大核rt-smart或小核linux上运行。
+
+## 环境准备
+
+### 硬件环境
+
+- K230-USIP-LP3-EVB-V1.0/K230-USIP-LP3-EVB-V1.1
+- Ubuntu PC 20.04
+- Typec USB线 * 2 至少
+- USB TypeC转以太网(如果使用TFTP加载和NFS文件系统)
+- 网线一根
+- SD卡(如果使用SD卡启动,或软件需要访问SD卡)
+
+### 软件环境
+
+k230_sdk中提供了工具链,分别在如下路径。
+
+- 大核rt-samrt工具链
+
+``` shell
+k230_sdk/toolchain/riscv64-linux-musleabi_for_x86_64-pc-linux-gnu
+```
+
+- 小核linux工具链
+
+``` shell
+k230_sdk/toolchain/Xuantie-900-gcc-linux-5.10.4-glibc-x86_64-V2.6.0
+```
+
+也可通过以下链接下载工具链
+
+``` shell
+wget https://download.rt-thread.org/rt-smart/riscv64/riscv64-unknown-linux-musl-rv64imafdcv-lp64d-20230222.tar.bz2
+wget https://occ-oss-prod.oss-cn-hangzhou.aliyuncs.com/resource//1659325511536/Xuantie-900-gcc-linux-5.10.4-glibc-x86_64-V2.6.0-20220715.tar.gz
+```
+
+### 代码编写
+
+在ubuntu上创建一个C文件hello.c并加入如下代码
+
+```C
+#include
+int main (void)
+{
+ printf("hello world\n");
+ return 0;
+}
+```
+
+将hello.c放到与k230_sdk同一级目录下
+
+``` shell
+canaan@develop:~/work$ ls
+hello.c k230_sdk
+```
+
+### 编译适用于小核linux的可执行程序
+
+``` shell
+k230_sdk/toolchain/Xuantie-900-gcc-linux-5.10.4-glibc-x86_64-V2.6.0/bin/riscv64-unknown-linux-gnu-gcc hello.c -o hello
+```
+
+### 编译适用于大核rt-smart的可执行程序
+
+``` shell
+k230_sdk/toolchain/riscv64-linux-musleabi_for_x86_64-pc-linux-gnu/bin/riscv64-unknown-linux-musl-gcc -o hello.o -c -mcmodel=medany -march=rv64imafdcv -mabi=lp64d hello.c
+
+k230_sdk/toolchain/riscv64-linux-musleabi_for_x86_64-pc-linux-gnu/bin/riscv64-unknown-linux-musl-gcc -o hello.elf -mcmodel=medany -march=rv64imafdcv -mabi=lp64d -T k230_sdk/src/big/mpp/userapps/sample/linker_scripts/riscv64/link.lds -Lk230_sdk_src/big/rt-smart/userapps/sdk/rt-thread/lib -Wl,--whole-archive -lrtthread -Wl,--no-whole-archive -n --static hello.o -Lk230_sdk/src/big/rt-smart/userapps/sdk/lib/risc-v/rv64 -Lk230_sdk/src/big/rt-smart/userapps/sdk/rt-thread/lib/risc-v/rv64 -Wl,--start-group -lrtthread -Wl,--end-group
+```
+
+### 运行程序
+
+将编译好的hello以及hello.elf拷贝到sd卡的vfat分区内(sd卡烧写完镜像后可以在pc端看到一个可用的盘符),或通过其他方式(参考sdk使用说明文档)将可执行程序拷贝到小核的/sharefs目录下。
+
+- 开发板启动后,在小核端运行测试程序,小核启动后输入`root`进入控制台
+
+``` shell
+Welcome to Buildroot
+canaan login: root
+[root@canaan ~ ]#cd /sharefs
+[root@canaan /sharefs ]#./hello
+hello world
+```
+
+- 在大核端运行测试程序
+
+``` shell
+msh /sharefs>hello.elf
+hello world
+```
+
+### 大核程序编译进阶
+
+大核如果用musl-gcc直接编译的话,编译参数是比较多的,对于初学者来说很不方便,也不太好理解,当前sdk中提供了两种用于编译大核程序的方式,分别是scons和Makefile,这里我们介绍scons的编译方式,Makefile的编译构建较为复杂,不是rt-smart官方提供的编译方式,感兴趣的读者可参考`src/big/mpp/userapps/sample`中的Makefile结构来编译。
+
+到`k230_sdk/src/big/rt-smart/userapps`目录下创建一个文件夹,命名为hello
+
+``` shell
+cd k230_sdk/src/big/rt-smart/userapps
+mkdir hello
+cd hello
+```
+
+创建以下三个文件
+
+- hello.c
+- SConscript
+
+``` python
+# RT-Thread building script for component
+
+from building import *
+
+cwd = GetCurrentDir()
+src = Glob('*.c')
+CPPPATH = [cwd]
+
+CPPDEFINES = [
+ 'HAVE_CCONFIG_H',
+]
+group = DefineGroup('hello', src, depend=[''], CPPPATH=CPPPATH, CPPDEFINES=CPPDEFINES)
+
+Return('group')
+```
+
+- SConstruct
+
+``` python
+import os
+import sys
+
+# add building.py path
+sys.path = sys.path + [os.path.join('..','..','tools')]
+from building import *
+
+BuildApplication('hello', 'SConscript', usr_root = '../')
+
+```
+
+之后回到`k230_sdk/src/big/rt-smart/`目录,配置环境变量
+
+``` shell
+canaan@develop:~/k230_sdk/src/big/rt-smart$ source smart-env.sh riscv64
+Arch => riscv64
+CC => gcc
+PREFIX => riscv64-unknown-linux-musl-
+EXEC_PATH => /home/canaan/k230_sdk/src/big/rt-smart/../../../toolchain/riscv64-linux-musleabi_for_x86_64-pc-linux-gnu/bin
+
+```
+
+进入`k230_sdk/src/big/rt-smart/userapps`目录,编译程序
+
+``` shell
+canaan@develop:~/k230_sdk/src/big/rt-smart/userapps$ scons --directory=hello
+scons: Entering directory `/home/canaan/k230_sdk/src/big/rt-smart/userapps/hello'
+scons: Reading SConscript files ...
+scons: done reading SConscript files.
+scons: Building targets ...
+scons: building associated VariantDir targets: build/hello
+CC build/hello/hello.o
+LINK hello.elf
+/home/canaan/k230_sdk/toolchain/riscv64-linux-musleabi_for_x86_64-pc-linux-gnu/bin/../lib/gcc/riscv64-unknown-linux-musl/12.0.1/../../../../riscv64-unknown-linux-musl/bin/ld: warning: hello.elf has a LOAD segment with RWX permissions
+scons: done building targets.
+```
+
+编译好的程序在hello文件夹下
+
+``` shell
+canaan@develop:~/k230_sdk/src/big/rt-smart/userapps$ ls hello/
+build cconfig.h hello.c hello.elf SConscript SConstruct
+```
+
+之后即可将hello.elf拷贝到小核linux上,然后大核rt-smart通过/sharefs即可运行该程序
diff --git "a/zh/02_applications/tutorials/K230_\347\274\226\347\240\201\345\256\236\346\210\230_rtsp_server\346\220\255\345\273\272\345\222\214\346\216\250\346\265\201.md" "b/zh/02_applications/tutorials/K230_\347\274\226\347\240\201\345\256\236\346\210\230_rtsp_server\346\220\255\345\273\272\345\222\214\346\216\250\346\265\201.md"
new file mode 100755
index 0000000..17c02e8
--- /dev/null
+++ "b/zh/02_applications/tutorials/K230_\347\274\226\347\240\201\345\256\236\346\210\230_rtsp_server\346\220\255\345\273\272\345\222\214\346\216\250\346\265\201.md"
@@ -0,0 +1,195 @@
+# K230 编码实战 - rtsp sever搭建和推流
+
+
+
+版权所有©2023北京嘉楠捷思信息技术有限公司
+
+
+
+## 免责声明
+
+您购买的产品、服务或特性等应受北京嘉楠捷思信息技术有限公司(“本公司”,下同)及其关联公司的商业合同和条款的约束,本文档中描述的全部或部分产品、服务或特性可能不在您的购买或使用范围之内。除非合同另有约定,本公司不对本文档的任何陈述、信息、内容的正确性、可靠性、完整性、适销性、符合特定目的和不侵权提供任何明示或默示的声明或保证。除非另有约定,本文档仅作为使用指导参考。
+
+由于产品版本升级或其他原因,本文档内容将可能在未经任何通知的情况下,不定期进行更新或修改。
+
+## 商标声明
+
+、“嘉楠”和其他嘉楠商标均为北京嘉楠捷思信息技术有限公司及其关联公司的商标。本文档可能提及的其他所有商标或注册商标,由各自的所有人拥有。
+
+**版权所有 © 2023北京嘉楠捷思信息技术有限公司。保留一切权利。**
+非经本公司书面许可,任何单位和个人不得擅自摘抄、复制本文档内容的部分或全部,并不得以任何形式传播。
+
+
+
+## 1. 环境准备
+
+### 1.1 硬件环境
+
+- K230-USIP-LP3-EVB-V1.0/K230-UNSIP-LP3-EVB-V1.1
+- Ubuntu PC 20.04
+- Typec USB线 * 2。
+ - 一根连接到UART0/3,用于串口收发,UART0对应小核,UART3对应大核。
+ - 一根连接到DC:5V接口,用于供电。
+- USB TypeC转以太网,连接到USB0。
+- 网线一根
+- SD卡(如果使用SD卡启动,或软件需要访问SD卡)
+- 摄像头子板(IMX335,用于rtsp推音视频流)
+- 耳机(用于语音对讲)
+- 杜邦线一根,按下图连接USB0_OTG_EN和高电平
+
+
+
+注意:音频对讲需要两套设备。
+
+### 1.2 软件环境
+
+- K230 SDK
+- VLC播放器
+
+### 1.3 运行准备
+
+在EVB上执行rtsp程序需要启动网络服务,并保证PC和EVB板在同一个网段。
+
+## 2. 源码介绍
+
+### 2.1 源码位置
+
+在SDK中包含的rtsp相关demo位于`k230_sdk/src/common/cdk/user/samples`目录下,其中
+
+- `rtsp_demo`:语音推音视频流程序
+- `rtsp`:语音对讲服务器端程序
+- `backchannel_client`:语音对讲客户端程序
+
+### 2.2 源码介绍
+
+K230 SDK采用双核架构,小核运行linux系统,实现网络控制服务。大核运行RTT系统,实现对音视频硬件的控制。小核在启动过程中负责引导大核。大小核通过核间通信进行消息通信和内存共享。多媒体软件架构如下:
+
+
+
+小核网络服务移植了live源码,路径为`k230_sdk/src/common/cdk/user/thirdparty/live`
+音频使用G711编码。
+音视频推流中,视频默认最大分辨率与配置的sensor_type相关,默认最大分辨率为1920x1080。
+
+#### 2.2.1 程序主要步骤
+
+##### 2.2.1.1 音视频推流程序
+
+1. `new StreamingPlayer`
+ - 初始化核间通信。
+ - 配置video buffer。
+1. `InitVicap`:初始化摄像头。
+1. `CreateSession`:
+ - 创建server session。
+ - 创建并开启音频输入通道,音频采样率为44.1k,采样宽度16bit。
+ - 初始化音频编码,音频采用G711A编码。
+ - 创建视频编码通道,使能IDR帧。
+1. `Start`:
+ - 开启视频编码通道并绑定到vo。
+ - 开启视频编码通道,并将视频输入绑定到视频编码。
+ - 开始音视频推流。
+
+##### 2.2.1.2 语音对讲程序
+
+1. `Init`:
+ - 创建server session。
+ - 初始化核间通信。
+ - 配置video buffer。
+ - 创建并开启音频输入通道,音频采样率为8k,采样宽度为16bit。
+ - 创建音频编码通道,音频采用G711U编码。
+ - 创建音频输出通道和音频解码通道,并将音频解码绑定到音频输出。
+1. `Start`:
+ - 开始推音频流。
+ - 开启视频编码通道,并将视频输入绑定到视频编码。
+
+## 3.程序执行
+
+### 3.1 rtsp推音视频流
+
+#### 3.1.1 参数说明
+
+| 参数名 | 描述 |参数范围 | 默认值 |
+|:--|:--|:--|:--|
+| help | 打印命令行参数信息 | - | - |
+| n | session个数 | `[1, 3]` | 1 |
+| t | 编码类型 | h264、h265、mjpeg | h264 |
+| w | 视频编码宽度 | `[128, 1920]` | 1280 |
+| h | 视频编码高度 | `[64, 1080]` |720 |
+| s | sensor类型。| 0: ov9732;1: ov9286 ir;2: ov9286 speckle;3: imx335 2LANE 1920Wx1080H;4: imx335 2LANE 2592Wx1944H;5: imx335 4LANE 2592Wx1944H;6: imx335 2LANE MCLK 7425 1920Wx1080H;7: imx335 2LANE MCLK 7425 2592Wx1944H;8: imx335 4LANE MCLK 7425 2592Wx1944H | 7 |
+
+#### 3.1.2 编译程序
+
+在`k230_sdk`目录下执行`make cdk-user`,在`k230_sdk/src/common/cdk/user/out/little/`目录下生成`rtsp_demo`
+
+程序源码目录`k230_sdk/src/common/cdk/user/samples/rtsp_demo`
+
+#### 3.1.3 运行程序
+
+支持音视频码流同时推流到rtsp server上,其中通过`mapi venc&aenc`接口实现对音视频的编码;推流之后通过url进行拉取,目前支持两路url推拉流。
+
+1. 在大核上执行:`cd /sharefs; ./sample_sys_init.elf`
+1. 在小核上执行:`./rtsp_demo`
+1. 小核上运行rtsp_demo后,会打印出形如:`rtsp://ip:8554/session0` 和 `rtsp://ip:8554/session01` 的url地址,可通过vlc拉取对应的流进行播放。
+ vlc拉流方式:媒体->打开网络串流->在打开的窗口中输入对应的url。
+ 
+
+### 3.2 语音对讲
+
+用于实现音频数据的双向传输和处理。
+语音对讲涉及到两端,两端均能实时采集编码发送音频数据到对端,同时也能接收对端来的音频数据进行解码和输出。
+当前实现参照了ONVIF,在rtsp协议的基础上扩展backchannel,从而支持从client向server发送音频数据;下文使用server和client分别代指语音对讲的两端。
+
+1. 音频码流格式为G711 mu-Law;
+1. sever端实现了实时的音频采集编码和发送,以及通过backchannel接收来自client的音频数据进行解码和输出;
+1. client端实现了音频码流的接收,解码和播放,以及实时采集音频,G711 mu-Law编码,并通过backchannel发送到server端
+1. 仅支持一对一的对讲(仅支持一路backchannel);
+1. 不支持回声消除等处理(设备侧需要音频输出到耳机,不能使用外放speaker);
+
+#### 3.2.1 编译程序
+
+在`k230_sdk`目录下执行`make cdk-user`,在`k230_sdk/src/common/cdk/user/out/little/`目录下生成`rtsp_server`和`backclient_test`
+
+程序源码目录:
+`k230_sdk/src/common/cdk/user/samples/rtsp_demo/rtsp_server`
+`k230_sdk/src/common/cdk/user/samples/rtsp_demo/backchannel_client`
+
+#### 3.2.2 运行程序
+
+两块EVB连到同一个网段,一个作为server,一个作为client。大小核完全启动后。
+
+server端运行如下命令:
+
+- 在大核上执行:`cd /sharefs; ./sample_sys_init.elf`
+- 在小核上执行:`cd /mnt; ./rtsp_server`(运行rtsp_server后,会打印出形如:`rtsp://:8554/BackChannelTest` 的url地址)
+
+client端运行如下命令:
+
+- 在大核上执行:`cd /sharefs; ./sample_sys_init.elf`
+- 在小核上执行:`./backclient_test rtsp://:8554/BackChannelTest`)
+
+## 4. 运行sharefs
+
+大核的`sample_sys_init.elf`默认没有装载到大核。可以通过下面两中方式将其在大核运行。
+
+1. 修改`k230_sdk/Makefile`中`mpp-apps`的编译脚本,在`cd -;`前增加如下命令,并在`k230_sdk`目录下执行`make rt-smart;make build-image`,生成的镜像文件中,在大核的`/bin`目录下即包含`sample_sys_init.elf`
+
+ ```sh
+ cp userapps/sample/elf/sample_sys_init.elf $(RTSMART_SRC_DIR)/userapps/root/bin/; \
+ ```
+
+1. 启动大小核之后,通过sharefs和tftp将可执行程序传输到EVB板上运行。
+/sharefs用于在大小核之间共享文件,大小核均可以通过访问各自的/sharefs目录来实现共享文件系统的功能。大核的自身文件系统为只读模式。可以在小核将/sharefs目录mount到SD卡分区或者PC的nfs目录等,并可通过tftp实现文件传输功能。
+
+ ```sh
+ mount /dev/mmcblk1p4 /sharefs #将/sharefs mount到SD卡分区
+ ```
+
+ ```sh
+ mount -t nfs -o nolock : /sharefs/ #将/sharefs mount到ipaddr的nfs_path目录
+ ```
+
+ tftp的命令如下:
+
+ ```sh
+ tftp -gr #从ipaddr的主机上将文件传输到板卡上
+ tftp -pl #将文件从板卡传输到ipaddr的主机上
+ ```
diff --git "a/zh/02_applications/tutorials/K230_\351\237\263\351\242\221\345\256\236\346\210\230_\351\237\263\351\242\221\351\207\207\351\233\206_\346\222\255\346\224\276\345\222\214\347\274\226\350\247\243\347\240\201.md" "b/zh/02_applications/tutorials/K230_\351\237\263\351\242\221\345\256\236\346\210\230_\351\237\263\351\242\221\351\207\207\351\233\206_\346\222\255\346\224\276\345\222\214\347\274\226\350\247\243\347\240\201.md"
new file mode 100644
index 0000000..707980d
--- /dev/null
+++ "b/zh/02_applications/tutorials/K230_\351\237\263\351\242\221\345\256\236\346\210\230_\351\237\263\351\242\221\351\207\207\351\233\206_\346\222\255\346\224\276\345\222\214\347\274\226\350\247\243\347\240\201.md"
@@ -0,0 +1,486 @@
+# K230 音频实战 - 音频采集、播放和编解码
+
+
+
+版权所有©2023北京嘉楠捷思信息技术有限公司
+
+
+
+## 免责声明
+
+您购买的产品、服务或特性等应受北京嘉楠捷思信息技术有限公司(“本公司”,下同)及其关联公司的商业合同和条款的约束,本文档中描述的全部或部分产品、服务或特性可能不在您的购买或使用范围之内。除非合同另有约定,本公司不对本文档的任何陈述、信息、内容的正确性、可靠性、完整性、适销性、符合特定目的和不侵权提供任何明示或默示的声明或保证。除非另有约定,本文档仅作为使用指导参考。
+
+由于产品版本升级或其他原因,本文档内容将可能在未经任何通知的情况下,不定期进行更新或修改。
+
+## 商标声明
+
+、“嘉楠”和其他嘉楠商标均为北京嘉楠捷思信息技术有限公司及其关联公司的商标。本文档可能提及的其他所有商标或注册商标,由各自的所有人拥有。
+
+**版权所有 © 2023北京嘉楠捷思信息技术有限公司。保留一切权利。**
+非经本公司书面许可,任何单位和个人不得擅自摘抄、复制本文档内容的部分或全部,并不得以任何形式传播。
+
+
+
+### 读者对象
+
+本文档(本指南)主要适用于以下人员:
+
+- 技术支持工程师
+- 软件开发工程师
+
+### 缩略词定义
+
+| 简称 | 说明 |
+| ---- | ------------ |
+| ai | 音频输入模块 |
+| ao | 音频输出模块 |
+| aenc | 音频编码模块 |
+| adec | 音频解码模块 |
+
+### 修订记录
+
+| 文档版本号 | 修改说明 | 修改者 | 日期 |
+|---|---|---|---|
+| V1.0 | 初版 | 孙小朋 | 2023-07-03 |
+| | | | |
+| | | | |
+
+## 1. 概述
+
+本文讲解如何使用音频demo在大核rt-smart或小核linux上实现音频采集、播放、编码、解码等功能。
+
+## 2. 环境准备
+
+### 2.1 硬件环境
+
+- K230-UNSIP-LP3-EVB-V1.0/K230-UNSIP-LP3-EVB-V1.1
+
+- Ubuntu PC 20.04
+
+- Typec USB线 * 2。
+ - 一根连接到UART0/3,用于串口收发,UART0对应小核,UART3对应大核。
+ - 一根链接到DC:5V接口,用于供电。
+
+- USB TypeC转以太网,连接到USB0。
+
+- 网线一根
+
+- SD卡(如果使用SD卡启动,或软件需要访问SD卡)
+
+- 音频子板(使用外置音频通路时需要),如下图所示,注意安装位置及跳线帽接法。当使用pdm音频传输接口及外置i2s音频传输接口时需要使用音频子板;仅使用内置i2s音频传输接口不需要音频子板。
+
+ 
+
+### 2.2 编译程序
+
+#### 2.2.1 编译方法
+
+在`k230_sdk`目录下执行`make rt-smart`,在`k230_sdk/src/big/mpp/userapps/sample/elf`目录下生成`sample_audio.elf`,为大核rt-smart下的音频demo。
+在`k230_sdk`目录下执行`make cdk-user`,在`k230_sdk/src/common/cdk/user/out/little/`目录下生成`sample_audio`,为小核linux下执行的音频demo。
+默认情况下,板子启动后大核rt-smart系统下sample_audio.elf在/sharefs下,小核audio demo sample_audio在/mnt下。
+
+#### 2.2.2 代码位置
+
+程序源码目录:
+大核音频demo源码位置:`k230_sdk/src/big/mpp/userapps/sample/sample_audio`
+小核音频demo源码位置:`k230_sdk/src/common/cdk/user/mapi/sample/sample_audio`
+
+## 3. 大核音频实战
+
+大核demo文件为sample_audio.elf,支持音频采集(ai),音频播放(ao),音频编码(aenc),音频解码(adec)等功能。
+
+### 3.1 参数说明
+
+| 参数名 | 描述 | 默认值 |
+|:--|:--|:--|
+| help | 打印命令行参数信息 | - |
+| samplerate | 设置音频采样率,有效值`[8000,12000,16000,24000,32000,44100,48000,96000,192000]` | 44100 |
+| enablecodec | i2s使用内置(1)或外置(0)链路,有效值:0、1 | 0 |
+| bitwidth | 采样精度,有效值:16、24、32 | 16 |
+| channels | 声道数,有效值:1、2 | 2 |
+| filename | 输入或输出的文件名称 | - |
+| type | 功能类型,有效值:[0,12],具体值参考下表 | 0 |
+
+| type值 | 功能描述 |
+| :----- | :----------------------------------------------------------- |
+| 0 | i2s 音频采集功能 |
+| 1 | pdm音频采集功能 |
+| 2 | i2s音频播放功能 |
+| 3 | ai->ao回环功能:使用api接口实现。ai为i2s接口,ao为i2s接口。 |
+| 4 | ai->ao回环功能:使用模块绑定(ai绑定ao)实现。ai为i2s接口,ao为i2s接口。 |
+| 5 | ai->ao回环功能:使用api接口实现。ai为pdm接口,ao为i2s接口。 |
+| 6 | ai->ao回环功能:使用模块绑定(ai绑定ao)实现。ai为pdm接口,ao为i2s接口。 |
+| 7 | 音频编码功能:ai->aenc,使用模块绑定(ai绑定aenc)实现,ai为i2s接口,aenc为g711a编码格式。 |
+| 8 | 音频解码功能:adec->ao,使用模块绑定(adec绑定ao)实现,ao为i2s接口,adec为g711a解码格式。 |
+| 9 | 音频编码功能:ai->aenc,使用api接口实现,ai为i2s接口,aenc为g711a编码格式。 |
+| 10 | 音频解码功能:adec->ao,使用api接口实现,ao为i2s接口,adec为g711a解码格式。 |
+| 12 | ai->aenc、adec->ao回环功能:使用模块绑定(ai绑定aenc,adec绑定ao)实现。ai为i2s接口,ao为i2s接口。 |
+
+### 3.2 音频采集
+
+音频采集支持i2s和pdm两种音频传输接口。i2s音频采集共支持两组,可同时工作;pdm音频采集共支持四组,可同时工作。
+
+i2s音频采集:共支持两组,其中第一组可选择为内置或外置通路,第二组固定为外置通路。当第一组作为内置通路使用时,左声道声音为耳机线性模拟输入,右声道声音为板载模拟麦输入,且当设置为单声道工作模式时,声音固定为板载模拟麦输入。当作为外置通路使用时,左右声道声音均为子板上数字麦输入。
+
+
+
+pdm音频采集:需接外置子板,共支持四组,且可同时工作。每组均支持单/双声道采集,且各声道声音均为子板上数字麦输入。
+
+
+
+### 3.2.1 i2s音频采集
+
+开发板启动后,在大核上运行如下测试程序:`/sharefs/sample_audio.elf -type 0 -enablecodec 1 -samplerate 48000 -bitwidth 24 -channels 2 -filename /sharefs/test.wav`
+demo使用采样率48000,使用内置codec通路,采样精度24bit,双声道,采集数据以wav格式保存到/sharefs/test.wav文件中,采集15s数据后退出。
+
+``` shell
+/sharefs/sample_audio.elf -type 0 -enablecodec 1 -samplerate 48000 -bitwidth 24 -channels 2 -filename /sharefs/test.wav
+audio type:0,sample rate:48000,bit width:24,channels:2,enablecodec:1
+mmz blk total size:8.12 MB
+vb_set_config ok
+sample ai i2s module
+audio i2s set clk freq is 3072000(3072000),ret:1
+audio codec adc clk freq is 12288000(12288000)
+audio_save_init get vb block size:4320044
+======kd_mpi_sys_mmap total size:4320044
+[0s] timestamp 0 us,curpts:3232823
+[1s] timestamp 1000000 us,curpts:4232823
+[2s] timestamp 2000000 us,curpts:5232823
+[3s] timestamp 3000000 us,curpts:6232823
+[4s] timestamp 4000000 us,curpts:7232823
+[5s] timestamp 5000000 us,curpts:8232823
+[6s] timestamp 6000000 us,curpts:9232823
+[7s] timestamp 7000000 us,curpts:10232823
+[8s] timestamp 8000000 us,curpts:11232823
+[9s] timestamp 9000000 us,curpts:12232823
+[10s] timestamp 10000000 us,curpts:13232823
+[11s] timestamp 11000000 us,curpts:14232823
+[12s] timestamp 12000000 us,curpts:15232823
+[13s] timestamp 13000000 us,curpts:16232823
+dump binary memory test1.wav 0x18242000 0x18660b2c
+[14s] timestamp 14000000 us,curpts:17232823
+destroy vb block
+sample done
+```
+
+### 3.2.2 pdm音频采集
+
+开发板启动后,在大核上运行如下测试程序:`/sharefs/sample_audio.elf -type 1 -samplerate 16000 -bitwidth 16 -channels 2 -filename /sharefs/test.wav`
+demo采样率16000,外置音频通路(需要接音频子板),采样精度16bit,双声道,采集数据以wav格式保存到/sharefs/test.wav文件中,采集15s数据后退出。
+
+``` shell
+/sharefs/sample_audio.elf -type 1 -samplerate 16000 -bitwidth 16 -channels 2 -filename /sharefs/test.wav
+audio type:1,sample rate:16000,bit width:16,channels:2,enablecodec:0
+mmz blk total size:2.71 MB
+vb_set_config ok
+sample ai pdm module
+audio_sample_get_ai_pdm_data channel_total:1,rec_channel:0,oversample:0
+pdm in init clk freq is 1536000
+pdm in set clk freq is 512000(512000)
+audio_save_init get vb block size:960044
+======kd_mpi_sys_mmap total size:960044
+[0s] timestamp 0 us,curpts:1006669
+[1s] timestamp 1000000 us,curpts:2006669
+[2s] timestamp 2000000 us,curpts:3006669
+[3s] timestamp 3000000 us,curpts:4006669
+[4s] timestamp 4000000 us,curpts:5006669
+[5s] timestamp 5000000 us,curpts:6006669
+[6s] timestamp 6000000 us,curpts:7006669
+[7s] timestamp 7000000 us,curpts:8006669
+[8s] timestamp 8000000 us,curpts:9006669
+[9s] timestamp 9000000 us,curpts:10006669
+[10s] timestamp 10000000 us,curpts:11006669
+[11s] timestamp 11000000 us,curpts:12006669
+[12s] timestamp 12000000 us,curpts:13006669
+[13s] timestamp 13000000 us,curpts:14006669
+dump binary memory test1.wav 0x180c1000 0x181ab62c
+[14s] timestamp 14000000 us,curpts:15006669
+destroy vb block
+sample done
+```
+
+### 3.3 音频播放
+
+音频播放支持i2s音频传输接口。i2s音频采集共支持两组,可同时工作。其中第一组可选择为内置或外置通路,第二组固定为外置通路。当第一组作为内置通路使用时,声音输出为板载耳机输出口;当使用外置通路时,声音输出为子板耳机输出口。
+
+
+
+#### 3.3.1 i2s音频播放
+
+开发板启动后,在大核上运行如下测试程序:`./sample_audio.elf -type 2 -filename test.wav -enablecodec 1`
+demo根据wav文件格式自动设置音频属性,循环播放wav文件,使用耳机插入板载耳机插口,即可听到声音。按任意键退出demo。
+
+``` shell
+./sample_audio.elf -type 2 -filename test.wav -enablecodec 1
+audio type:2,sample rate:44100,bit width:16,channels:2,enablecodec:1
+mmz blk total size:7.46 MB
+vb_set_config ok
+enter any key to exit
+sample ao i2s module
+========read_wav_header:headerlen:44,channel:2,samplerate:16000,bitpersample:16
+open file:test.wav ok,file size:960044,data size:960000,wav header size:44
+=======_get_audio_frame virt_addr:0x10010e000
+audio i2s set clk freq is 1024000(1024000),ret:1
+audio init codec dac clk freq is 11289600
+audio set codec dac clk freq is 4096000(4096000)
+read file again
+q
+diable ao audio
+destroy vb block
+sample done
+```
+
+### 3.4 音频编解码
+
+内置g711a/u编解码模块,如需支持其他编解码格式,可通过注册外部编解码器来实现。所有编解码模块均使用CPU软件编解码且只支持16bit采样精度。
+
+音频编码存储流程如下,数据流向为ai->aenc。
+
+
+
+音频解码播放流程如下,数据流向为adec->ao。
+
+
+
+#### 3.4.1 音频编码
+
+开发板启动后,在大核上运行如下测试程序:`./sample_audio.elf -type 7 -filename /sharefs/test.g711a -channels 2 -samplerate 8000 -bitwidth 16 -enablecodec 1`
+将ai采集到的数据(双声道,采样率8000,内置codec链路,采样精度16)编码成g711a格式后存到文件中,按任意键退出demo。
+
+``` shell
+./sample_audio.elf -type 7 -filename /sharefs/test.g711a -channels 2 -samplerate 8000 -bitwidth 16 -enablecodec 1
+audio type:7,sample rate:8000,bit width:16,channels:1,enablecodec:1
+mmz blk total size:1.35 MB
+vb_set_config ok
+enter any key to exit
+sample aenc module (sysbind)
+audio i2s set clk freq is 512000(512000),ret:1
+audio codec adc clk freq is 2048000(2048000)
+q
+destroy vb block
+sample done
+```
+
+#### 3.4.2 音频解码
+
+开发板启动后,在大核上运行如下测试程序:`./sample_audio.elf -type 8 -filename /sharefs/test.g711a -channels 2 -samplerate 8000 -bitwidth 16 -enablecodec 1`
+将g711a格式(采样率8000,声道数2,采样精度16)文件解码后通过ao(内置codec通路)播放输出,按任意键退出demo。
+
+``` shell
+./sample_audio.elf -type 8 -filename /sharefs/test.g711a -channels 2 -samplerate 8000 -bitwidth 16 -enablecodec 1
+audio type:8,sample rate:8000,bit width:16,channels:2,enablecodec:1
+mmz blk total size:1.35 MB
+vb_set_config ok
+enter any key to exit
+sample adec module (sysbind)
+audio i2s set clk freq is 512000(512000),ret:1
+audio init codec dac clk freq is 4096000
+audio set codec dac clk freq is 2048000(2048000)
+adec_bind_call_back dev_id:0 chn_id:0
+read file again
+q
+adec_bind_call_back dev_id:0 chn_id:0
+destroy vb block
+sample done
+```
+
+### 3.5 回环测试
+
+### 3.5.1 i2s采集播放回环
+
+开发板启动后,在大核上运行如下测试程序:`./sample_audio.elf -type 4 -enablecodec 1 -bitwidth 16 -samplerate 48000 -channels 2`
+同时运行ai和ao模块,将ai(采样精度16,采样率48000,双声道)采集到的声音数据实时输出到ao(采样精度16,采样率48000,双声道)播放,使用内置codec通路,按任意键退出demo。具体流程图如下。
+
+
+
+``` shell
+./sample_audio.elf -type 4 -enablecodec 1 -bitwidth 16 -samplerate 48000 -channels 2
+audio type:4,sample rate:48000,bit width:16,channels:2,enablecodec:1
+mmz blk total size:8.12 MB
+vb_set_config ok
+enter any key to exit
+sample ai(i2s) bind ao module
+audio i2s set clk freq is 3072000(3072000),ret:1
+audio codec adc clk freq is 12288000(12288000)
+audio i2s set clk freq is 3072000(3072000),ret:1
+audio init codec dac clk freq is 2048000
+audio set codec dac clk freq is 12288000(12288000)
+q
+diable ao module
+diable ai module
+release vb block
+destroy vb block
+sample done
+```
+
+### 3.5.2 pdm采集播放回环
+
+开发板启动后,在大核上运行如下测试程序:`./sample_audio.elf -type 6 -bitwidth 32 -samplerate 48000 -channels 2 -enablecodec 0`
+同时运行ai和ao模块,将ai(采样精度32,采样率48000,双声道)采集到的声音数据实时输出到ao(采样精度32,采样率48000,双声道)播放,使用外置子板通路,按任意键退出demo。具体流程图如下。
+
+
+
+``` shell
+./sample_audio.elf -type 6 -bitwidth 32 -samplerate 48000 -channels 2 -enablecodec 0
+audio type:6,sample rate:48000,bit width:32,channels:2,enablecodec:0
+mmz blk total size:8.12 MB
+vb_set_config ok
+enter any key to exit
+sample ai(pdm) bind ao module
+pdm in init clk freq is 3072000
+pdm in set clk freq is 3072000(3072000)
+audio i2s set clk freq is 3072000(3072000),ret:1
+q
+diable ao module
+diable ai module
+release vb block
+destroy vb block
+sample done
+```
+
+### 3.5.3 编解码回环
+
+开发板启动后,在大核上运行如下测试程序:`./sample_audio.elf -type 12 -samplerate 44100`
+同时运行ai、adec、aenc、ao模块,将ai绑定aenc,adec绑定ao,从aenc获取到的数据发送到adec,进而实现回环效果。音频采样精度固定为16bit,固定使用内置codec通路,按任意键退出demo。数据流如下图:
+
+
+
+``` shell
+./sample_audio.elf -type 12 -samplerate 44100
+audio type:12,sample rate:44100,bit width:16,channels:2,enablecodec:0
+mmz blk total size:7.46 MB
+vb_set_config ok
+enter any key to exit
+sample ai->aenc adec->ao module (loopback)
+Force the sampling accuracy to be set to 16,use inner cocdec
+audio i2s set clk freq is 2822400(2822400),ret:1
+audio codec adc clk freq is 11289600(11289600)
+audio i2s set clk freq is 2822400(2822400),ret:1
+audio init codec dac clk freq is 12288000
+audio set codec dac clk freq is 11289600(11289600)
+adec_bind_call_back dev_id:0 chn_id:0
+[0s] g711 stream timestamp 0 us,curpts:1059296
+[1s] g711 stream timestamp 1000000 us,curpts:2059296
+[2s] g711 stream timestamp 2000000 us,curpts:3059296
+[3s] g711 stream timestamp 3000000 us,curpts:4059296
+[4s] g711 stream timestamp 4000000 us,curpts:5059296
+[5s] g711 stream timestamp 5000000 us,curpts:6059296
+[6s] g711 stream timestamp 6000000 us,curpts:7059296
+[7s] g711 stream timestamp 7000000 us,curpts:8059296
+[8s] g711 stream timestamp 8000000 us,curpts:9059296
+q
+adec_bind_call_back dev_id:0 chn_id:0
+destroy vb block
+sample done
+```
+
+## 4. 小核音频实战
+
+小核demo文件为sample_audio,支持音频采集(ai),音频播放(ao),音频编码(aenc),音频解码(adec)等功能。
+
+### 4.1 参数说明
+
+| 参数名 | 描述 | 默认值 |
+|:--|:--|:--|
+| help | 打印命令行参数信息 | - |
+| samplerate | 设置音频采样率,有效值`[8000,12000,16000,24000,32000,44100,48000,96000,192000]` | 44100 |
+| enablecodec | i2s使用内置(1)或外置(0)链路,有效值:0、1 | 0 |
+| channels | 声道数,有效值:1、2 | 2 |
+| filename | 输入或输出的文件名称 | - |
+| type | 功能类型,有效值:[0,2],具体值参考下表 | 0 |
+
+| type值 | 功能描述 |
+| :----- | :----------------------------------------------------------- |
+| 0 | 音频采集编码功能:ai->aenc,使用模块绑定(ai绑定aenc)实现,ai为i2s接口,aenc为g711a编码格式,采样精度固定16bit。 |
+| 1 | 音频解码播放功能:adec->ao,使用模块绑定(adec绑定ao)实现,ao为i2s接口,adec为g711a解码格式,采样精度固定16bit。 |
+| 2 | ai->aenc、adec->ao回环功能:使用模块绑定(ai绑定aenc,adec绑定ao)实现。ai为i2s接口,aenc为g711a格式,adec为g711a格式,ao为i2s接口,采样精度固定16bit。 |
+
+### 4.2 音频采集编码
+
+开发板启动后,在大核上运行程序:/sharefs/sample_sys_init.elf &
+在小核上运行如下程序:`./sample_audio -type 0 -samplerate 8000 -enablecodec 1 -channels 1 -filename test.g711a`
+将ai采集到的数据(单声道,采样率8000,内置codec链路,采样精度16)编码成g711a格式后存到文件中,按q键退出demo。数据流程图如下:
+
+
+
+``` shell
+./sample_audio -type 0 -samplerate 8000 -enablecodec 1 -channels 1 -filename test.g711a
+audio type:0,sample rate:8000,channels:1,enablecodec:1,filename:test.g711a
+mmz blk total size:0.38 MB
+[AENC_S] [Func]:_init_datafifo [Line]:174 [Info]:_aenc_datafifo_init_slave ok,datafifo_phyaddr:0x18061000,data_hdl:0x18061000
+enter 'q' key to exit
+_aenc_dataproc chn_num:0,stream data:0x18003c00,data len:320,seq:0,timestamp:99306
+_aenc_dataproc chn_num:0,stream data:0x18005a00,data len:320,seq:1,timestamp:139306
+_aenc_dataproc chn_num:0,stream data:0x18007800,data len:320,seq:2,timestamp:179306
+_aenc_dataproc chn_num:0,stream data:0x18009600,data len:320,seq:3,timestamp:219306
+_aenc_dataproc chn_num:0,stream data:0x1800b400,data len:320,seq:4,timestamp:259306
+_aenc_dataproc chn_num:0,stream data:0x1800d200,data len:320,seq:5,timestamp:299306
+_aenc_dataproc chn_num:0,stream data:0x1800f000,data len:320,seq:6,timestamp:339306
+_aenc_dataproc chn_num:0,stream data:0x18010e00,data len:320,seq:7,timestamp:379306
+_aenc_dataproc chn_num:0,stream data:0x18012c00,data len:320,seq:8,timestamp:419306
+_aenc_dataproc chn_num:0,stream data:0x18014a00,data len:320,seq:9,timestamp:459306
+_aenc_dataproc chn_num:0,stream data:0x18016800,data len:320,seq:10,timestamp:499306
+_aenc_dataproc chn_num:0,stream data:0x18018600,data len:320,seq:11,timestamp:539306
+_aenc_dataproc chn_num:0,stream data:0x1801a400,data len:320,seq:12,timestamp:579306
+_aenc_dataproc chn_num:0,stream data:0x1801c200,data len:320,seq:13,timestamp:619306
+_aenc_dataproc chn_num:0,stream data:0x1801e000,data len:320,seq:14,timestamp:659306
+_aenc_dataproc chn_num:0,stream data:0x1801fe00,data len:320,seq:15,timestamp:699306
+_aenc_dataproc chn_num:0,stream data:0x18021c00,data len:320,seq:16,timestamp:739306
+_aenc_dataproc chn_num:0,stream data:0x18023a00,data len:320,seq:17,timestamp:779306
+_aenc_dataproc chn_num:0,stream data:0x18025800,data len:320,seq:18,timestamp:819306
+_aenc_dataproc chn_num:0,stream data:0x18027600,data len:320,seq:19,timestamp:859306
+_aenc_dataproc chn_num:0,stream data:0x18029400,data len:320,seq:20,timestamp:899306
+_aenc_dataproc chn_num:0,stream data:0x1802b200,data len:320,seq:21,timestamp:939306
+_aenc_dataproc chn_num:0,stream data:0x1802d000,data len:320,seq:22,timestamp:979306
+_aenc_dataproc chn_num:0,stream data:0x1802ee00,data len:320,seq:23,timestamp:1019306
+_aenc_dataproc chn_num:0,stream data:0x18030c00,data len:320,seq:24,timestamp:1059306
+_aenc_dataproc chn_num:0,stream data:0x18032000,data len:320,seq:25,timestamp:1099306
+_aenc_dataproc chn_num:0,stream data:0x18033400,data len:320,seq:26,timestamp:1139306
+_aenc_dataproc chn_num:0,stream data:0x18034800,data len:320,seq:27,timestamp:1179306
+_aenc_dataproc chn_num:0,stream data:0x18035c00,data len:320,seq:28,timestamp:1219306
+_aenc_dataproc chn_num:0,stream data:0x18037000,data len:320,seq:29,timestamp:1259306
+q
+sample done
+```
+
+### 4.3 音频解码播放
+
+开发板启动后,在大核上运行程序:/sharefs/sample_sys_init.elf &
+在小核上运行如下测试程序:`./sample_audio -type 1 -samplerate 8000 -enablecodec 1 -channels 1 -filename test.g711a`
+将g711a格式(采样率8000,声道数1,采样精度16)文件解码后通过ao(内置codec通路)输出,按q键退出demo。
+
+
+
+``` shell
+./sample_audio -type 1 -samplerate 8000 -enablecodec 1 -channels 1 -filename test.g711a
+audio type:1,sample rate:8000,channels:1,enablecodec:1,filename:test.g711a
+mmz blk total size:0.38 MB
+[ADEC_S] [Func]:_init_datafifo [Line]:189 [Info]:_adec_datafifo_init_slave ok,datafifo_phyaddr:0x18061000,data_hdl:0x18061000
+enter 'q' key to exit
+[ADEC_S] [Func]:_datafifo_release_func [Line]:157 [Info]:_datafifo_release_func,adec_hdl:0
+read file again
+read file again
+read file again
+q
+sample done
+```
+
+### 4.4 编解码回环
+
+开发板启动后,在大核上运行程序:`/sharefs/sample_sys_init.elf &`
+在小核上运行如下测试程序:`./sample_audio -type 2 -samplerate 48000 -enablecodec 1 -channels 2`
+同时运行ai、adec、aenc、ao模块,将ai(采样率48000,声道数2,采样精度16)绑定aenc(g711a),adec(g711a)绑定ao(采样率48000,声道数2,采样精度16),从aenc获取到的数据发送到adec,进而实现回环效果。
+
+
+
+``` shell
+./sample_audio -type 2 -samplerate 48000 -enablecodec 1 -channels 2
+audio type:2,sample rate:48000,channels:2,enablecodec:1,filename:
+mmz blk total size:2.26 MB
+[AENC_S] [Func]:_init_datafifo [Line]:174 [Info]:_aenc_datafifo_init_slave ok,datafifo_phyaddr:0x18242000,data_hdl:0x18242000
+[ADEC_S] [Func]:_init_datafifo [Line]:189 [Info]:_adec_datafifo_init_slave ok,datafifo_phyaddr:0x18243000,data_hdl:0x18243000
+enter 'q' key to exit
+[ADEC_S] [Func]:_datafifo_release_func [Line]:157 [Info]:_datafifo_release_func,adec_hdl:0
+q
+sample done
+```
diff --git a/zh/02_applications/tutorials/images/audio--i2s-decode-play.png b/zh/02_applications/tutorials/images/audio--i2s-decode-play.png
new file mode 100644
index 0000000..61df209
Binary files /dev/null and b/zh/02_applications/tutorials/images/audio--i2s-decode-play.png differ
diff --git a/zh/02_applications/tutorials/images/audio-ai-aenc-adec-ao-loopback.png b/zh/02_applications/tutorials/images/audio-ai-aenc-adec-ao-loopback.png
new file mode 100644
index 0000000..0461534
Binary files /dev/null and b/zh/02_applications/tutorials/images/audio-ai-aenc-adec-ao-loopback.png differ
diff --git a/zh/02_applications/tutorials/images/audio-ai-ao-loopback.png b/zh/02_applications/tutorials/images/audio-ai-ao-loopback.png
new file mode 100644
index 0000000..0461534
Binary files /dev/null and b/zh/02_applications/tutorials/images/audio-ai-ao-loopback.png differ
diff --git a/zh/02_applications/tutorials/images/audio-board.png b/zh/02_applications/tutorials/images/audio-board.png
new file mode 100644
index 0000000..62be7e3
Binary files /dev/null and b/zh/02_applications/tutorials/images/audio-board.png differ
diff --git a/zh/02_applications/tutorials/images/audio-capture-i2s-encode-mapi.png b/zh/02_applications/tutorials/images/audio-capture-i2s-encode-mapi.png
new file mode 100644
index 0000000..010af0b
Binary files /dev/null and b/zh/02_applications/tutorials/images/audio-capture-i2s-encode-mapi.png differ
diff --git a/zh/02_applications/tutorials/images/audio-capture-i2s-encode.png b/zh/02_applications/tutorials/images/audio-capture-i2s-encode.png
new file mode 100644
index 0000000..f469fac
Binary files /dev/null and b/zh/02_applications/tutorials/images/audio-capture-i2s-encode.png differ
diff --git a/zh/02_applications/tutorials/images/audio-capture-i2s.png b/zh/02_applications/tutorials/images/audio-capture-i2s.png
new file mode 100644
index 0000000..166696d
Binary files /dev/null and b/zh/02_applications/tutorials/images/audio-capture-i2s.png differ
diff --git a/zh/02_applications/tutorials/images/audio-capture-pdm.png b/zh/02_applications/tutorials/images/audio-capture-pdm.png
new file mode 100644
index 0000000..4eebf17
Binary files /dev/null and b/zh/02_applications/tutorials/images/audio-capture-pdm.png differ
diff --git a/zh/02_applications/tutorials/images/audio-decode-i2s-play-mapi.png b/zh/02_applications/tutorials/images/audio-decode-i2s-play-mapi.png
new file mode 100644
index 0000000..f342ab1
Binary files /dev/null and b/zh/02_applications/tutorials/images/audio-decode-i2s-play-mapi.png differ
diff --git a/zh/02_applications/tutorials/images/audio-i2s-ai-ao-loopback.png b/zh/02_applications/tutorials/images/audio-i2s-ai-ao-loopback.png
new file mode 100644
index 0000000..b183fe1
Binary files /dev/null and b/zh/02_applications/tutorials/images/audio-i2s-ai-ao-loopback.png differ
diff --git a/zh/02_applications/tutorials/images/audio-loopback-mapi.png b/zh/02_applications/tutorials/images/audio-loopback-mapi.png
new file mode 100644
index 0000000..8f573bc
Binary files /dev/null and b/zh/02_applications/tutorials/images/audio-loopback-mapi.png differ
diff --git a/zh/02_applications/tutorials/images/audio-pdm-ai-ao-loopback.png b/zh/02_applications/tutorials/images/audio-pdm-ai-ao-loopback.png
new file mode 100644
index 0000000..261063c
Binary files /dev/null and b/zh/02_applications/tutorials/images/audio-pdm-ai-ao-loopback.png differ
diff --git a/zh/02_applications/tutorials/images/audio-play-i2s.png b/zh/02_applications/tutorials/images/audio-play-i2s.png
new file mode 100644
index 0000000..3fe9f29
Binary files /dev/null and b/zh/02_applications/tutorials/images/audio-play-i2s.png differ
diff --git a/zh/02_applications/tutorials/images/boot_logo.png b/zh/02_applications/tutorials/images/boot_logo.png
new file mode 100755
index 0000000..05f2716
Binary files /dev/null and b/zh/02_applications/tutorials/images/boot_logo.png differ
diff --git a/zh/02_applications/tutorials/images/camer_sensor_connect.png b/zh/02_applications/tutorials/images/camer_sensor_connect.png
new file mode 100755
index 0000000..3273784
Binary files /dev/null and b/zh/02_applications/tutorials/images/camer_sensor_connect.png differ
diff --git a/zh/02_applications/tutorials/images/camera_sensor_arch.png b/zh/02_applications/tutorials/images/camera_sensor_arch.png
new file mode 100755
index 0000000..309a1d6
Binary files /dev/null and b/zh/02_applications/tutorials/images/camera_sensor_arch.png differ
diff --git a/zh/02_applications/tutorials/images/canaan-cover.png b/zh/02_applications/tutorials/images/canaan-cover.png
new file mode 100755
index 0000000..0319765
Binary files /dev/null and b/zh/02_applications/tutorials/images/canaan-cover.png differ
diff --git a/zh/02_applications/tutorials/images/canaan-lable.png b/zh/02_applications/tutorials/images/canaan-lable.png
new file mode 100755
index 0000000..009a662
Binary files /dev/null and b/zh/02_applications/tutorials/images/canaan-lable.png differ
diff --git a/zh/02_applications/tutorials/images/gpu-1.jpg b/zh/02_applications/tutorials/images/gpu-1.jpg
new file mode 100755
index 0000000..859b8b7
Binary files /dev/null and b/zh/02_applications/tutorials/images/gpu-1.jpg differ
diff --git a/zh/02_applications/tutorials/images/gpu-2.jpg b/zh/02_applications/tutorials/images/gpu-2.jpg
new file mode 100755
index 0000000..4337387
Binary files /dev/null and b/zh/02_applications/tutorials/images/gpu-2.jpg differ
diff --git a/zh/02_applications/tutorials/images/gpu-3.jpg b/zh/02_applications/tutorials/images/gpu-3.jpg
new file mode 100755
index 0000000..dae2af1
Binary files /dev/null and b/zh/02_applications/tutorials/images/gpu-3.jpg differ
diff --git a/zh/02_applications/tutorials/images/logo.png b/zh/02_applications/tutorials/images/logo.png
new file mode 100755
index 0000000..aa48558
Binary files /dev/null and b/zh/02_applications/tutorials/images/logo.png differ
diff --git a/zh/02_applications/tutorials/images/lvgl_demo_widgets.png b/zh/02_applications/tutorials/images/lvgl_demo_widgets.png
new file mode 100644
index 0000000..06d3432
Binary files /dev/null and b/zh/02_applications/tutorials/images/lvgl_demo_widgets.png differ
diff --git a/zh/02_applications/tutorials/images/media_linux_menuconfig.png b/zh/02_applications/tutorials/images/media_linux_menuconfig.png
new file mode 100755
index 0000000..ec5656f
Binary files /dev/null and b/zh/02_applications/tutorials/images/media_linux_menuconfig.png differ
diff --git a/zh/02_applications/tutorials/images/mpp_structure.png b/zh/02_applications/tutorials/images/mpp_structure.png
new file mode 100755
index 0000000..14f1d3f
Binary files /dev/null and b/zh/02_applications/tutorials/images/mpp_structure.png differ
diff --git a/zh/02_applications/tutorials/images/udc_linux_menuconfig.png b/zh/02_applications/tutorials/images/udc_linux_menuconfig.png
new file mode 100755
index 0000000..3b6a422
Binary files /dev/null and b/zh/02_applications/tutorials/images/udc_linux_menuconfig.png differ
diff --git a/zh/02_applications/tutorials/images/usb_bulk.png b/zh/02_applications/tutorials/images/usb_bulk.png
new file mode 100755
index 0000000..20c2dc8
Binary files /dev/null and b/zh/02_applications/tutorials/images/usb_bulk.png differ
diff --git a/zh/02_applications/tutorials/images/usb_control.png b/zh/02_applications/tutorials/images/usb_control.png
new file mode 100755
index 0000000..0af7508
Binary files /dev/null and b/zh/02_applications/tutorials/images/usb_control.png differ
diff --git a/zh/02_applications/tutorials/images/usb_ethnet_pin.png b/zh/02_applications/tutorials/images/usb_ethnet_pin.png
new file mode 100755
index 0000000..0d3e16e
Binary files /dev/null and b/zh/02_applications/tutorials/images/usb_ethnet_pin.png differ
diff --git a/zh/02_applications/tutorials/images/usb_gadget.png b/zh/02_applications/tutorials/images/usb_gadget.png
new file mode 100755
index 0000000..797e00c
Binary files /dev/null and b/zh/02_applications/tutorials/images/usb_gadget.png differ
diff --git a/zh/02_applications/tutorials/images/usb_interrupt.png b/zh/02_applications/tutorials/images/usb_interrupt.png
new file mode 100755
index 0000000..cd4a084
Binary files /dev/null and b/zh/02_applications/tutorials/images/usb_interrupt.png differ
diff --git a/zh/02_applications/tutorials/images/usb_iso.png b/zh/02_applications/tutorials/images/usb_iso.png
new file mode 100755
index 0000000..b8fbf3d
Binary files /dev/null and b/zh/02_applications/tutorials/images/usb_iso.png differ
diff --git a/zh/02_applications/tutorials/images/usb_packet.png b/zh/02_applications/tutorials/images/usb_packet.png
new file mode 100755
index 0000000..e78721a
Binary files /dev/null and b/zh/02_applications/tutorials/images/usb_packet.png differ
diff --git a/zh/02_applications/tutorials/images/usb_phy.png b/zh/02_applications/tutorials/images/usb_phy.png
new file mode 100755
index 0000000..5309334
Binary files /dev/null and b/zh/02_applications/tutorials/images/usb_phy.png differ
diff --git a/zh/02_applications/tutorials/images/usb_transaction.png b/zh/02_applications/tutorials/images/usb_transaction.png
new file mode 100755
index 0000000..d3489f3
Binary files /dev/null and b/zh/02_applications/tutorials/images/usb_transaction.png differ
diff --git a/zh/02_applications/tutorials/images/usb_unit.png b/zh/02_applications/tutorials/images/usb_unit.png
new file mode 100755
index 0000000..5199f79
Binary files /dev/null and b/zh/02_applications/tutorials/images/usb_unit.png differ
diff --git a/zh/02_applications/tutorials/images/usb_uvc_layout.png b/zh/02_applications/tutorials/images/usb_uvc_layout.png
new file mode 100755
index 0000000..c65f298
Binary files /dev/null and b/zh/02_applications/tutorials/images/usb_uvc_layout.png differ
diff --git a/zh/02_applications/tutorials/images/usb_vs.png b/zh/02_applications/tutorials/images/usb_vs.png
new file mode 100755
index 0000000..7e0b672
Binary files /dev/null and b/zh/02_applications/tutorials/images/usb_vs.png differ
diff --git a/zh/02_applications/tutorials/images/uvc_app_flow.png b/zh/02_applications/tutorials/images/uvc_app_flow.png
new file mode 100755
index 0000000..e79c3e6
Binary files /dev/null and b/zh/02_applications/tutorials/images/uvc_app_flow.png differ
diff --git a/zh/02_applications/tutorials/images/uvc_framework.png b/zh/02_applications/tutorials/images/uvc_framework.png
new file mode 100755
index 0000000..857c532
Binary files /dev/null and b/zh/02_applications/tutorials/images/uvc_framework.png differ
diff --git a/zh/02_applications/tutorials/images/uvc_linux_menuconfig.png b/zh/02_applications/tutorials/images/uvc_linux_menuconfig.png
new file mode 100755
index 0000000..14ddc87
Binary files /dev/null and b/zh/02_applications/tutorials/images/uvc_linux_menuconfig.png differ
diff --git a/zh/02_applications/tutorials/images/uvc_payload.png b/zh/02_applications/tutorials/images/uvc_payload.png
new file mode 100755
index 0000000..088465d
Binary files /dev/null and b/zh/02_applications/tutorials/images/uvc_payload.png differ
diff --git a/zh/02_applications/tutorials/images/uvc_payload_header.png b/zh/02_applications/tutorials/images/uvc_payload_header.png
new file mode 100755
index 0000000..012d34e
Binary files /dev/null and b/zh/02_applications/tutorials/images/uvc_payload_header.png differ
diff --git a/zh/02_applications/tutorials/images/vlc.png b/zh/02_applications/tutorials/images/vlc.png
new file mode 100755
index 0000000..e554cd6
Binary files /dev/null and b/zh/02_applications/tutorials/images/vlc.png differ
diff --git "a/zh/03_other/K230_SDK_\347\211\210\346\234\254\350\257\264\346\230\216.md" "b/zh/03_other/K230_SDK_\347\211\210\346\234\254\350\257\264\346\230\216.md"
new file mode 100755
index 0000000..5f1d0b5
--- /dev/null
+++ "b/zh/03_other/K230_SDK_\347\211\210\346\234\254\350\257\264\346\230\216.md"
@@ -0,0 +1,222 @@
+# K230 SDK版本说明
+
+
+
+版权所有©2023北京嘉楠捷思信息技术有限公司
+
+
+
+## 免责声明
+
+您购买的产品、服务或特性等应受北京嘉楠捷思信息技术有限公司(“本公司”,下同)及其关联公司的商业合同和条款的约束,本文档中描述的全部或部分产品、服务或特性可能不在您的购买或使用范围之内。除非合同另有约定,本公司不对本文档的任何陈述、信息、内容的正确性、可靠性、完整性、适销性、符合特定目的和不侵权提供任何明示或默示的声明或保证。除非另有约定,本文档仅作为使用指导参考。
+
+由于产品版本升级或其他原因,本文档内容将可能在未经任何通知的情况下,不定期进行更新或修改。
+
+## 商标声明
+
+、“嘉楠”和其他嘉楠商标均为北京嘉楠捷思信息技术有限公司及其关联公司的商标。本文档可能提及的其他所有商标或注册商标,由各自的所有人拥有。
+
+**版权所有 © 2023北京嘉楠捷思信息技术有限公司。保留一切权利。**
+非经本公司书面许可,任何单位和个人不得擅自摘抄、复制本文档内容的部分或全部,并不得以任何形式传播。
+
+
+
+## 目录
+
+[TOC]
+
+## 前言
+
+### 概述
+
+本文档主要介绍了K230 SDK V0.8.0 版本发布相关的内容,包括当前版本支持的硬件、功能、使用限制等。
+
+### 读者对象
+
+本文档(本指南)主要适用于以下人员:
+
+- 技术支持工程师
+- 软件开发工程师
+
+### 缩略词定义
+
+| 简称 | 说明 |
+|--------------------|--------------------------------------------------------|
+| K230 USIP LP3 EVB | USIP封装形式的K230芯片搭载LPDDR3的开发板 |
+| VENC | Video Encoder,视频编码模块 |
+| VDEC | Video Decoder,视频解码模块 |
+| VICAP | Video Input Capture,图像输入采集模块 |
+| VO | Video Output,视频输出模块 |
+| AI | Audio Input,音频输入模块 |
+| AO | Audio Output,音频输出模块 |
+| AENC | Audio Encoder,音频编码模块 |
+| ADEC | Audio Decoder,音频解码模块 |
+| NonAI-2D | 2D图形加速处理模块,支持OSD叠加,画框,CSC变换等功能。 |
+
+### 修订记录
+
+| 文档版本号 | 修改说明 | 修改者 | 日期 |
+|------------|----------|------------|----------|
+| V1.0 | 初版 | SDK部 | 2023-7-4 |
+
+## 1. 版本信息
+
+| 所属产品 | 版本号 | 发布日期 |
+|----------|--------|----------|
+| K230 SDK | V0.8.0 | 2023-7-4 |
+
+## 2. 支持的硬件
+
+K230 USIP LP3 EVB:具体硬件信息参考《K230 EVB硬件使用文档》。
+
+## 3. 版本使用限制说明
+
+当前SDK的USIP LP3 EVB上内存布局如下图所示:
+
+
+
+图-1 SDK内存布局
+
+可通过在k230_sdk目录下输入`make menuconfig` 选择`Memory->Configuration`来配置各模块的内存区间,暂不支持配置
+参数区和核间通讯区域的内存配置
+
+## 4. 版本功能统计
+
+### 4.1 多媒体
+
+| ID | 支持版本 | 功能概要 | 功能描述 | 备注 |
+|----|---------------|----------------------|--------------------------------------------------------------------------------------------|------|
+| 1 | K230 SDK V0.5 | venc | H264/H265/JPEG编码 | |
+| 2 | K230 SDK V0.5 | vdec | H264/H265/JPEG解码 | |
+| 3 | K230 SDK V0.5 | vicap bind venc | vicap输入绑定到venc输出 | |
+| 4 | K230 SDK V0.5 | vdec bind vo | vdec绑定到vo输出图像 | |
+| 5 | K230 SDK V0.5 | venc_2d | OSD叠加后编码 | |
+| 6 | K230 SDK V0.5 | nonai_2d | OSD叠加 | |
+| 7 | K230 SDK V0.5 | i2s 音频输入 | 采样精度(16/24/32),采样率(8k-192k),时间戳(us),双声道,每帧采样点可配。 | |
+| 8 | K230 SDK V0.5 | pdm 音频输入 | 采样精度(16/24),采样率(8k-192k),过采样(32/64/128),单双声道,时间戳(us),每帧采样点可配。 | |
+| 9 | K230 SDK V0.5 | i2s 音频输出 | 采样精度(16/24/32),采样率(8k-192k),双声道,每帧采样点可配。 | |
+| 10 | K230 SDK V0.5 | 内置audio codec | 支持adc、dac、采样精度(16/24),采样率(8k-192k) | |
+| 11 | K230 SDK V0.5 | ai(i2s) bind ao(i2s) | ai 绑定ao,i2s音频采集到i2s音频输出回环 | |
+| 12 | K230 SDK V0.5 | ai(pdm) bind ao(i2s) | ai 绑定ao,pdm音频采集到i2s音频输出回环 | |
+| 13 | K230 SDK V0.6 | venc | 多路编码,旋转和镜像 | |
+| 14 | K230 SDK V0.6 | venc_2d | 画框 | |
+| 15 | K230 SDK V0.6 | venc MAPI | VI-\>VENC-\>小核存文件 | |
+| 16 | K230 SDK V0.6 | aenc | 音频编码,内置g711a/u | |
+| 17 | K230 SDK V0.6 | adec | 音频解码,内置g711a/u | |
+| 18 | K230 SDK V0.6 | ai bind aenc | ai绑定aenc,采集编码后的数据 | |
+| 19 | K230 SDK V0.6 | adec bind ao | adec绑定ao,播放输出解码后的音频 | |
+| 20 | K230 SDK V0.6 | audio 3a | AEC(回声消除),ANS(噪声抑制),AGC(自动增益) | |
+| 21 | K230 SDK V0.7 | venc gop | 支持设置编码GOP | |
+| 22 | K230 SDK V0.7 | venc mirror | 支持设置编码水平、垂直翻转 | |
+| 23 | K230 SDK V0.7 | venc idr | 支持编码IDR帧enable/disable | |
+| 24 | K230 SDK V0.7 | venc multi channel | mapi_venc_2路 h264编码 | |
+| 25 | K230 SDK V0.7 | audio i2s mapi | mapi-audio_i2S采集音频编码后传递给大核 | |
+| 26 | K230 SDK V0.7 | audio enc mapi | mapi-audio_小核编码文件传给大核解码并播放 | |
+| 27 | K230 SDK V0.7 | audio volume | 增加内置audio codec 数字、模拟音量控制接口。 | |
+| 28 | K230 SDK V0.7 | mapi rtsp | mapi-网络传输-rtsp 音视频推流 | |
+| 29 | K230 SDK V0.8 | mapi vdec | 小核视频编码文件传给大核解码并播放 | |
+| 30 | K230 SDK V0.8 | venc mpi | deblock, sao, entropy: enable/disable | |
+| 31 | K230 SDK V0.8 | vdec mpi | 支持down scale | |
+| 32 | K230 SDK V0.8 | dpu demo | 屏显深度图:vicap->dma->dpu->vo | |
+| 32 | K230 SDK V0.8 | 语音对讲 demo | 增加语音对讲demo | |
+
+### 4.2 图像
+
+| ID | 支持版本 | 功能概要 | 功能描述 | 备注 |
+|----|---------------|---------------|---------------------------------------------------------------------------------------------------------------------------------------|------|
+| 1 | K230 SDK V0.5 | vicap | 支持sensor图像采集(OV9732、OV9286) | |
+| 2 | K230 SDK V0.5 | AE | 支持AE自动曝光 | |
+| 3 | K230 SDK V0.5 | vicap bind vo | vicap 绑定到 vo输出图像 | |
+| 4 | K230 SDK V0.5 | GPU绘图 | 矢量绘制填充(直线、二次贝塞尔曲线、三次贝塞尔曲线、椭圆曲线) 线性渐变 颜色查找表 图像合成/混合,BLIT | |
+| 5 | K230 SDK V0.5 | 图像调优 | tuning tool 通过网络、串口连接开发板进行图像调优。 black level correction lens shading correction color calibration AWB CAC gamma | |
+| 6 | K230 SDK V0.5 | display bind | 支持vo和vicap,vo 和 vdec 绑定 | |
+| 7 | K230 SDK V0.5 | display 显示 | 支持osd和yuv 显示 支持dump 帧功能 支持dsi 和 vo timing 可配 支持插帧功能 | |
+| 8 | K230 SDK V0.6 | 图像调优 | tuning tool可以配置sensor寄存器 | |
+| 9 | K230 SDK V0.6 | 时间戳、帧号 | 支持时间戳、帧号 | |
+| 10 | K230 SDK V0.6 | ISP+KPU Demo | 人脸检测联动demo | |
+| 11 | K230 SDK V0.7 | dewarp | 添加dewarp功能,可以实现畸变校正 | |
+| 12 | K230 SDK V0.7 | Face AE | 添加了FaceAE的功能及对应的FaceAE demo | |
+| 13 | K230 SDK V0.7 | 添加Imx335 | 添加Imx335 sensor驱动及demo | |
+| 14 | K230 SDK V0.8 | 添加DRM | Linux小核添加DRM驱动及demo | |
+| 15 | K230 SDK V0.8 | 添加LVGL | Linux小核添加LVGL及demo | |
+| 16 | K230 SDK V0.8 | 快启APP | 快启APP Sensor改为Imx335(带晶振) | |
+
+### 4.3 平台
+
+| ID | 支持版本 | 功能概要 | 功能描述 | 备注 |
+|----|---------------|------------------------|----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------|------|
+| 1 | K230 SDK V0.5 | 启动外设 | 支持eMMC、1/4线SD card | |
+| 2 | K230 SDK V0.5 | 大核DPU驱动 | 图像输入、输出驱动开发;基本功能,eg读取参数、支持动态更新长周期参数、输出缓冲、时间戳、算法等;支持pipeline绑定 | |
+| 3 | K230 SDK V0.5 | 小核UBOOT | DDR训练、磁盘驱动(emmc、sd、spi 1线); 支持pufs和gzip解压缩 | |
+| 4 | K230 SDK V0.5 | 小核SPI驱动 | 1线 | |
+| 5 | K230 SDK V0.5 | 小核SDIO驱动 | 支持SDIO0/1挂接SDCard | |
+| 6 | K230 SDK V0.5 | 小核USB(UVC)驱动 | 支持UVC驱动(K230芯片做slave) | |
+| 7 | K230 SDK V0.5 | 小核GPIO驱动 | 支持每个IO单独作为逻辑资源分配;支持IO和中断 | |
+| 8 | K230 SDK V0.5 | 小核磁盘和文件系统 | 支持SDIO0/1挂接SDCard、支持SDIO0/1挂接eMMC;支持ext2/3/4, fat32文件系统 | |
+| 9 | K230 SDK V0.5 | I2C驱动 | 大小核I2C总线驱动 | |
+| 10 | K230 SDK V0.5 | uart驱动 | 大小核uart驱动 | |
+| 11 | K230 SDK V0.5 | UVC基础demo | uvc camera,将板子作为摄像头 | |
+| 12 | K230 SDK V0.5 | GSDMA(大核驱动) | 支持使用 gdma 进行图像搬移,通过配置通道属性来实现图像的旋转和镜像,搬运多种图像格式(例如YUV400,YUV420,YUV444),搬运多种像素位宽的图像(例如 8bit, 10bit,16bit); 支持使用 sdma 进行数据搬移,支持 1d 模式和 2d 模式的搬运。支持pipeline绑定。 | |
+| 13 | K230 SDK V0.6 | 大核GPIO驱动 | 支持独立配置和使用IO功能,独立配置和触发中断,加入了硬件互斥锁以保证寄存器访问的互斥。 | |
+| 14 | K230 SDK V0.6 | 启动外设 | 支持spi nor flash镜像生成和启动 | |
+| 15 | K230 SDK V0.6 | uboot SPI norflash驱动 | 支持8线 DMA | |
+| 16 | K230 SDK V0.6 | 大核 ADC 驱动 | 支持 ADC 读取电压值 | |
+| 17 | K230 SDK V0.7 | 大小核WDT驱动 | 支持watchdog复位soc | |
+| 18 | K230 SDK V0.7 | 大核SPI驱动 | 支持spi单线模式,支持nandflash | |
+| 19 | K230 SDK V0.7 | 小核SPI驱动 | 支持spi单线、八线模式,支持nordflash | |
+| 20 | K230 SDK V0.7 | 快起功能 | sdk默认快起,非快起版本可通过make menuconfig关闭CONFIG_QUICK_BOOT宏。快起版本uboot不会进命令行。 | |
+| 21 | K230 SDK V0.7 | 安全镜像 | sdk默认不产生安全镜像,可通过make menuconfig配置CONFIG_GEN_SECURITY_IMG产生安全镜像 | |
+| 22 | K230 SDK V0.7 | UVC基础demo | 增加支持H264格式,当前存在bug,只能运行一会儿时间 | |
+| 23 | K230 SDK V0.7 | DPU、GSDMA | buffer数量可配置 | |
+| 24 | K230 SDK V0.8 | 大核timer、rtc、pwm | 大核新增timer 驱动及demo;大核新增pwm驱动及demo;大核新增rtc驱动及demo。 | |
+| 25 | K230 SDK V0.8 | spi nand 支持 | 小核(uboot,linux)支持4线spi nand驱动, sdk支持从spinand启动; | |
+| 26 | K230 SDK V0.8 | UVC基础demo | UVC支持IMX335摄像头,UVC支持MJPEG格式 | |
+| 27 | K230 SDK V0.8 | spinor 增加人脸特性等参数分区 | spi nor 新增人脸特性、ai模型、标定参数、大核app、散斑、快起参数等参数分区;从spinor启动时uboot会解析并加载各个分区数据。 | |
+
+### 4.4 架构
+
+| ID | 支持版本 | 功能概要 | 功能描述 | 备注 |
+|----|---------------|----------------|-------------------------------------------------------------------------------------------------------------------------------------|-------------------------------------|
+| 1 | K230 SDK V0.5 | 多媒体内存管理 | 多媒体区域内存管理驱动、MPI、MAPI;视频缓存池驱动、MPI、MAPI | |
+| 2 | K230 SDK V0.5 | 日志管理 | 多媒体日志管理驱动、MPI、MAPI | |
+| 3 | K230 SDK V0.5 | 系统绑定 | 多媒体系统绑定驱动、MPI | |
+| 4 | K230 SDK V0.5 | 大核多媒体调试 | 提供proc文件系统用于调试 | |
+| 5 | K230 SDK V0.5 | 核间通讯 | 核间通讯驱动 | |
+| 6 | K230 SDK V0.5 | 核间控制通信 | IPCMSG库 | |
+| 7 | K230 SDK V0.5 | 核间数据通信 | DATAFIFO库 | |
+| 8 | K230 SDK V0.5 | 共享文件系统 | sharefs | 小核做server,大核做client |
+| 9 | K230 SDK V0.5 | 系统控制 | 大小核时钟电源与复位驱动 | |
+| 10 | K230 SDK V0.5 | KPU | KPU驱动 | |
+| 11 | K230 SDK V0.5 | 大核系统调试 | JTAG调试;本地串口;CPU占用率统计分析等 | |
+| 12 | K230 SDK V0.5 | 小核系统调试 | JTAG调试、串口调试、网口调试、CPU占用率统计分析、性能调试手段、调试及log输出端口(物理串口)、kernel及异常信息输出、转储、debug版本 | perf没有默认配置到内核和buildroot中 |
+| 13 | K230 SDK V0.7 | 软件SHA256 | 大核MPP下增加SHA256软件实现 | |
+| 14 | K230 SDK V0.7 | OTP读写功能 | 大核rt-smart中增加OTP读写功能,小核Linux中增加OTP读功能 | |
+| 15 | K230 SDK V0.7 | Tsensor读功能 | 大核rt-smart中增加Tsensor读功能,小核Linux中增加Tsensor读功能,用于读取芯片结温 | |
+| 16 | K230 SDK V0.7 | TRNG读功能 | 小核Linux中增加TRNG读功能 | |
+| 17 | K230 SDK V0.7 | 快起demo | 添加大核快速启动人脸检测demo | |
+| 18 | K230 SDK V0.7 | PMU功能 | 添加小核linux的PMU待机和唤醒功能 | |
+| 19 | K230 SDK V0.8 | 门锁POC | 大核添加POC门锁功能,小核添加UI功能,通过UI界面或SD卡注册人脸并完成识别 | |
+
+### 4.5 其它
+
+| ID | 支持版本 | 功能概要 | 功能描述 | 备注 |
+|----|---------------|----------------------|------------------------------------------------------------------|------|
+| 1 | K230 SDK V0.5 | ai demo | 提供三个ai demo 分别是door_lock、object_detect、image_classify; | |
+| 2 | K230 SDK V0.5 | AiW4211LV10 WiFi驱动 | 支持网络数据通信;支持控制指令发送; | |
+| 3 | K230 SDK V0.6 | AiW4211LV10 WiFi固件 | 固件兼容指令及网络配置,支持断网重连,支持k230电平监测及唤醒 | |
+| 4 | K230 SDK V0.6 | 触摸屏支持 | 触摸屏支持 | |
+| 5 | K230 SDK V0.7 | 软件镜像 | sdk编译会生成demo 可执行文件,但默认不打包到镜像;安全镜像文件默认不生成,可需手动配置 | |
+| 6 | K230 SDK V0.7 | 工具链 | 大核工具链版本更新为:riscv64-unknown-linux-musl-rv64imafdcv-lp64d-20230420.tar.bz2 | |
+| 7 | K230 SDK V0.8 | 软件镜像 | Emmc/Sdcard镜像打包时,会将大核的demo打包到小核/sharefs | |
+| 8 | K230 SDK V0.8 | Demo | 为了适配不同的camera模组而修改相关的demo,比如编码/UVC,demo具体使用可查看《K230 SDK Demo使用指南》 | |
+
+## 5. 版本的遗留问题及限制说明
+
+| ID | 功能模块 | 问题/限制描述 | 备注 |
+|----|---------------|---------------------------------------------------------------------------------------|------|
+| 1 | VPU编码 | VPU重复编码多次,有概率性卡住 | |
+| 2 | VO | VO显示动态画面时,中间会有一条折线 | |
+| 3 | VO | 重复启动摄像头,有概率vo仅背光亮,没有画面 | |
+| 4 | 推流 | rtsp推流不稳定 | |
+| 5 | usb | 通过usb传输h264编码长时间运行会异常 | |
+| 5 | 大核SPI | 有些主板nandflash 擦除卡住 | |
diff --git a/zh/03_other/images/5405a8e58a3314ae95f2d737dd0c01d9.png b/zh/03_other/images/5405a8e58a3314ae95f2d737dd0c01d9.png
new file mode 100644
index 0000000..3a98d83
Binary files /dev/null and b/zh/03_other/images/5405a8e58a3314ae95f2d737dd0c01d9.png differ
diff --git a/zh/03_other/images/70c84709960aa37885bfaabcc29d0538.jpg b/zh/03_other/images/70c84709960aa37885bfaabcc29d0538.jpg
new file mode 100644
index 0000000..51635ea
Binary files /dev/null and b/zh/03_other/images/70c84709960aa37885bfaabcc29d0538.jpg differ
diff --git a/zh/03_other/images/canaan-cover.png b/zh/03_other/images/canaan-cover.png
new file mode 100644
index 0000000..0319765
Binary files /dev/null and b/zh/03_other/images/canaan-cover.png differ
diff --git a/zh/03_other/images/k230_unsip_board.png b/zh/03_other/images/k230_unsip_board.png
new file mode 100755
index 0000000..9708b8b
Binary files /dev/null and b/zh/03_other/images/k230_unsip_board.png differ
diff --git a/zh/03_other/images/logo.png b/zh/03_other/images/logo.png
new file mode 100644
index 0000000..aa48558
Binary files /dev/null and b/zh/03_other/images/logo.png differ
diff --git "a/zh/03_other/\345\205\215\350\264\243\345\243\260\346\230\216_\345\214\227\344\272\254\345\230\211\346\245\240\346\215\267\346\200\235\344\277\241\346\201\257\346\212\200\346\234\257\346\234\211\351\231\220\345\205\254\345\217\270.txt" "b/zh/03_other/\345\205\215\350\264\243\345\243\260\346\230\216_\345\214\227\344\272\254\345\230\211\346\245\240\346\215\267\346\200\235\344\277\241\346\201\257\346\212\200\346\234\257\346\234\211\351\231\220\345\205\254\345\217\270.txt"
new file mode 100644
index 0000000..28fdbd3
--- /dev/null
+++ "b/zh/03_other/\345\205\215\350\264\243\345\243\260\346\230\216_\345\214\227\344\272\254\345\230\211\346\245\240\346\215\267\346\200\235\344\277\241\346\201\257\346\212\200\346\234\257\346\234\211\351\231\220\345\205\254\345\217\270.txt"
@@ -0,0 +1,8 @@
+免责声明
+
+ 嘉楠提醒您,本文档所提供的交付件仅供客户开发参考。在使用本文件夹所提供的交付件前,请您务必仔细阅读并透彻理解本声明。您可以选择不使用本文件夹中的交付件,但如果您使用,您的使用行为将被视为对本声明全部内容的认可。
+ 本文档所提供的交付件仍然是“按现状”提供,不附有任何种类的陈述与保证,在法律许可的最大范围内,嘉楠声明免除所有默示的陈述与保证,包括但不限于默示的有关适销、非侵权和适用于某种特定用途的陈述与保证。本清单中所提供的数据在不同的测试环境下可能存在一定的偏差,因使用本清单中所提供的数据而导致的所有设计、开发错误,或其他一切因使用本目录中所提供的数据而可能遭致的意外、疏忽、侵权及其造成的损失(包括但不限于直接的、间接的、后果性的或附带性的损失),其后果由您自行承担,嘉楠对其概不负责,亦不承担任何法律责任。
+
+
+ 声明单位:北京嘉楠捷思信息技术有限公司
+ 日 期:2023-5-31
diff --git "a/zh/template/K230_XX\344\275\277\347\224\250\346\214\207\345\215\227_\346\250\241\346\235\277.md" "b/zh/template/K230_XX\344\275\277\347\224\250\346\214\207\345\215\227_\346\250\241\346\235\277.md"
new file mode 100644
index 0000000..af1691e
--- /dev/null
+++ "b/zh/template/K230_XX\344\275\277\347\224\250\346\214\207\345\215\227_\346\250\241\346\235\277.md"
@@ -0,0 +1,234 @@
+# K230 xx使用指南
+
+
+
+版权所有©2023北京嘉楠捷思信息技术有限公司
+
+
+
+## 免责声明
+
+您购买的产品、服务或特性等应受北京嘉楠捷思信息技术有限公司(“本公司”,下同)及其关联公司的商业合同和条款的约束,本文档中描述的全部或部分产品、服务或特性可能不在您的购买或使用范围之内。除非合同另有约定,本公司不对本文档的任何陈述、信息、内容的正确性、可靠性、完整性、适销性、符合特定目的和不侵权提供任何明示或默示的声明或保证。除非另有约定,本文档仅作为使用指导参考。
+
+由于产品版本升级或其他原因,本文档内容将可能在未经任何通知的情况下,不定期进行更新或修改。
+
+## 商标声明
+
+、“嘉楠”和其他嘉楠商标均为北京嘉楠捷思信息技术有限公司及其关联公司的商标。本文档可能提及的其他所有商标或注册商标,由各自的所有人拥有。
+
+**版权所有 © 2023北京嘉楠捷思信息技术有限公司。保留一切权利。**
+非经本公司书面许可,任何单位和个人不得擅自摘抄、复制本文档内容的部分或全部,并不得以任何形式传播。
+
+
+
+## 目录
+
+[TOC]
+
+## 前言
+
+### 概述
+
+本文档主要介绍xxx。
+
+### 读者对象
+
+本文档(本指南)主要适用于以下人员:
+
+- 技术支持工程师
+- 软件开发工程师
+
+### 缩略词定义
+
+| 简称 | 说明 |
+| ---- | ---- |
+| XXX | xx |
+| XXX | xx |
+
+### 修订记录
+
+| 文档版本号 | 修改说明 | 修改者 | 日期 |
+| ---------- | -------- | ---------- | ---------- |
+| V1.0 | 初版 | 系统软件部 | 2023-03-10 |
+| V1.1 | | | |
+| V1.2 | | | |
+
+## 1. 概述
+
+此文档介绍xxx等。
+
+## 2.xx模块介绍
+
+### 2.1 xx模块
+
+#### 2.1.1 xx模块简介
+
+xxx
+
+#### 2.1.2 Feature说明
+
+xx 包含了。
+
+#### 2.1.3 依赖资源
+
+需要屏幕
+
+## 3. Markdown语法参考(完成文档时删除)
+
+### 插入图片
+
+语法
+
+
+Example:
+
+
+### 插入表格
+
+| Column1 |Column2 | Column3 |
+| - |- |- |
+| Cell1 | Cell2 | Cell3 |
+| Cell4 | Cell5 | Cell6 |
+| Cell7 | Cell8 | Cell9 |
+
+### 斜体&加粗
+
+*斜体* **加粗**
+
+### 插入网页链接
+
+[链接文字](https://www.zhihu.com/question/20409634/answer/90728572)
+
+### 图片链接
+
+[文字描述](图片链接地址)
+
+### 引用文字
+
+>这里是引用文字
+
+### 插入代码
+
+语法:
+
+```语言
+ Code
+ Code
+```
+
+Example:
+
+```Python
+ #!/usr/bin/env python3
+ print("Hello, World!")
+```
+
+### 分割线
+
+---
+
+### 有序列表
+
+1. 条目1
+ (1) 条目1
+ (2) 条目2
+ (3) 条目3
+1. 条目2
+1. 条目3
+
+### 无序列表
+
+- 条目1
+- 条目2
+
+### 显示符号本身
+
+\+
+\-
+\*
+\!
+\!
+
+### 注意/提示
+
+**注意/提示:**
+>注意内容
+
+### API描述
+
+#### kd_xxx_func
+
+【描述】
+
+示例API
+
+【语法】
+
+```c
+k_s32 kd_xxx_func(k_s32 a)
+```
+
+【参数】
+
+| 参数名称 | 描述 | 输入/输出 |
+|-----------------|-------------------------------|-----------|
+| a | 示例参数 | 输入 |
+
+【返回值】
+
+| 返回值 | 描述 |
+|---------|---------------------------------|
+| 0 | 成功。 |
+| 非 0 | 失败,其值为\[错误码\] |
+
+【芯片差异】
+
+无
+
+【需求】
+
+- 头文件:k_xxx.h
+- 库文件:libxxx.a
+
+【注意】
+无
+
+【举例】
+
+无
+
+【相关主题】
+
+无
+
+## 数据结构描述
+
+### k_xxx_type
+
+【说明】
+
+示例数据结结构
+
+【定义】
+
+```c
+typedef struct
+{
+ int a;
+} k_xxx_type
+```
+
+【注意事项】
+
+无
+
+【相关数据类型及接口】
+
+无
+
+## 调试及打印信息
+
+``` shell
+haohaibo@develop:/proc$ cat /proc/version
+Linux version 5.4.0-139-generic (buildd@lcy02-amd64-112) (gcc version 9.4.0 (Ubuntu 9.4.0-1ubuntu1~20.04.1)) #156-Ubuntu SMP Fri Jan 20 17:27:18 UTC 2023
+```
diff --git a/zh/template/images/canaan-cover.png b/zh/template/images/canaan-cover.png
new file mode 100644
index 0000000..0319765
Binary files /dev/null and b/zh/template/images/canaan-cover.png differ
diff --git a/zh/template/images/canaan-lable.png b/zh/template/images/canaan-lable.png
new file mode 100644
index 0000000..009a662
Binary files /dev/null and b/zh/template/images/canaan-lable.png differ
diff --git a/zh/template/images/logo.png b/zh/template/images/logo.png
new file mode 100755
index 0000000..aa48558
Binary files /dev/null and b/zh/template/images/logo.png differ