diff --git a/.travis.rosinstall.melodic b/.travis.rosinstall.melodic
index d9add05bce..278b28a7f6 100644
--- a/.travis.rosinstall.melodic
+++ b/.travis.rosinstall.melodic
@@ -54,3 +54,15 @@
local-name: DENSORobot/denso_cobotta_ros
uri: https://github.com/DENSORobot/denso_cobotta_ros.git
version: bb60e75adb8477ed3402561b4ec3ba687af3f397
+# switchbot_ros is not correctly released.
+# see: https://github.com/jsk-ros-pkg/jsk_3rdparty/issues/356
+- git:
+ local-name: jsk-ros-pkg/jsk_3rdparty
+ uri: https://github.com/jsk-ros-pkg/jsk_3rdparty.git
+ version: f0ab7bba54523b8f9945ed4a3e9c0efec0c8dde9
+# for jsk_spot_teleop in jsk_robot
+# spot_msgs is not released
+- git:
+ local-name: clearpathrobotics/spot_ros
+ uri: https://github.com/clearpathrobotics/spot_ros.git
+ version: 8e1554b95cf2875a53f14fda8165957559b0ffb7
\ No newline at end of file
diff --git a/jsk_robot_common/jsk_robot_startup/lifelog/mongodb_replication_params.yaml b/jsk_robot_common/jsk_robot_startup/lifelog/mongodb_replication_params.yaml
index 966a90f87d..2a8b99f9ea 100644
--- a/jsk_robot_common/jsk_robot_startup/lifelog/mongodb_replication_params.yaml
+++ b/jsk_robot_common/jsk_robot_startup/lifelog/mongodb_replication_params.yaml
@@ -1,4 +1,4 @@
-mongodb_store_extras: [["robot-database.jsk.imi.i.u-tokyo.ac.jp", 27017],["musca.jsk.imi.i.u-tokyo.ac.jp",27017]]
+mongodb_store_extras: [["robot-database.jsk.imi.i.u-tokyo.ac.jp", 27017]]
replication_client:
interval: 3600
delete_after_move: true
diff --git a/jsk_robot_common/jsk_robot_startup/package.xml b/jsk_robot_common/jsk_robot_startup/package.xml
index 8b1e644b85..c008fbdf44 100644
--- a/jsk_robot_common/jsk_robot_startup/package.xml
+++ b/jsk_robot_common/jsk_robot_startup/package.xml
@@ -19,6 +19,7 @@
sensor_msgs
dynamic_reconfigure
urdf
+
actionlib_msgs
app_manager
dynamic_reconfigure
diff --git a/jsk_robot_common/jsk_robot_startup/scripts/head_teleop_joy_completion.py b/jsk_robot_common/jsk_robot_startup/scripts/head_teleop_joy_completion.py
index cc323c7ee1..a1637a517a 100755
--- a/jsk_robot_common/jsk_robot_startup/scripts/head_teleop_joy_completion.py
+++ b/jsk_robot_common/jsk_robot_startup/scripts/head_teleop_joy_completion.py
@@ -58,9 +58,9 @@ def callback(self,msg):
rospy.loginfo("raw: x={:5.2f}, y={:5.2f}, v={:5.2f}, r={:5.2f} -> cmd: x={:5.2f}, y={:5.2f}, r={:5.2f}".format(x, y, v, r, xx, yy, rr))
msg.axes = list(msg.axes) # tuple to list
- msg.axes[self.axis_linear_x] = xx
- msg.axes[self.axis_linear_y] = yy
- msg.axes[self.axis_angular] = rr
+ msg.axes[self.axis_linear_x] = max(min(xx, self.axis_linear_x_max), self.axis_linear_x_min)
+ msg.axes[self.axis_linear_y] = max(min(yy, self.axis_linear_y_max), self.axis_linear_y_min)
+ msg.axes[self.axis_angular] = max(min(rr, self.axis_angular_max), self.axis_angular_min)
self.pub.publish(msg)
@@ -74,6 +74,13 @@ def spin(self):
if rospy.Time.now() - self.last_publish_time > rospy.Duration(3.0):
self.pub.publish(msg)
+ def get_param(self, key1, key2, value):
+ p = rospy.get_param(key1)
+ if type(p) == dict and p.has_key(key2):
+ return p[key2]
+ else:
+ return value
+
def __init__(self):
rospy.init_node('joy_topic_completion')
self.pass_through = rospy.get_param('~pass_through', True)
@@ -81,6 +88,12 @@ def __init__(self):
self.axis_linear_x = int(rospy.get_param('~axis_linear', {'x': 1})['x'])
self.axis_linear_y = int(rospy.get_param('~axis_linear', {'y': 2})['y'])
self.axis_angular = int(rospy.get_param('~axis_angular', {'yaw': 0})['yaw'])
+ self.axis_linear_x_min = float(self.get_param('~axis_linear', 'x_min', -1))
+ self.axis_linear_x_max = float(self.get_param('~axis_linear', 'x_max', 1))
+ self.axis_linear_y_min = float(self.get_param('~axis_linear', 'y_min', -1))
+ self.axis_linear_y_max = float(self.get_param('~axis_linear', 'y_max', 1))
+ self.axis_angular_min = float(self.get_param('~axis_angular', 'yaw_min', -0.5))
+ self.axis_angular_max = float(self.get_param('~axis_angular', 'yaw_max', 0.5))
self.last_publish_time = rospy.Time.now()
diff --git a/jsk_robot_common/jsk_robot_startup/src/quadruped_joystick_teleop.cpp b/jsk_robot_common/jsk_robot_startup/src/quadruped_joystick_teleop.cpp
index 9a35c227a7..d0077eec62 100644
--- a/jsk_robot_common/jsk_robot_startup/src/quadruped_joystick_teleop.cpp
+++ b/jsk_robot_common/jsk_robot_startup/src/quadruped_joystick_teleop.cpp
@@ -67,7 +67,7 @@ class TeleopManager
sound_play::SoundRequest msg;
msg.sound = sound_play::SoundRequest::SAY;
msg.command = sound_play::SoundRequest::PLAY_ONCE;
- msg.volume = 1.0;
+ msg.volume = 0.3;
msg.arg = message;
pub_sound_play_.publish(msg);
}
@@ -92,7 +92,7 @@ class TeleopManager
if ( client_estop_hard_.call(srv) && srv.response.success ) {
ROS_INFO_STREAM("Service " << client_estop_hard_.getService() << " succeeded.");
} else {
- ROS_ERROR_STREAM("Service " << client_estop_hard_.getService() << " failed.");
+ ROS_ERROR_STREAM("Service " << client_estop_hard_.getService() << " failed. (" << srv.response.message << ")");
}
pressed_[button_estop_hard_] = true;
}
@@ -115,7 +115,7 @@ class TeleopManager
if ( client_estop_gentle_.call(srv) && srv.response.success ) {
ROS_INFO_STREAM("Service " << client_estop_gentle_.getService() << " succeeded.");
} else {
- ROS_ERROR_STREAM("Service " << client_estop_gentle_.getService() << " failed.");
+ ROS_ERROR_STREAM("Service " << client_estop_gentle_.getService() << " failed. (" << srv.response.message << ")");
}
pressed_[button_estop_gentle_] = true;
}
@@ -138,7 +138,7 @@ class TeleopManager
if ( client_power_off_.call(srv) && srv.response.success ) {
ROS_INFO_STREAM("Service " << client_power_off_.getService() << " succeeded.");
} else {
- ROS_ERROR_STREAM("Service " << client_power_off_.getService() << " failed.");
+ ROS_ERROR_STREAM("Service " << client_power_off_.getService() << " failed. (" << srv.response.message << ")");
}
pressed_[button_power_off_] = true;
}
@@ -161,7 +161,7 @@ class TeleopManager
if ( client_power_on_.call(srv) && srv.response.success ) {
ROS_INFO_STREAM("Service " << client_power_on_.getService() << " succeeded.");
} else {
- ROS_ERROR_STREAM("Service " << client_power_on_.getService() << " failed.");
+ ROS_ERROR_STREAM("Service " << client_power_on_.getService() << " failed. (" << srv.response.message << ")");
}
pressed_[button_power_on_] = true;
}
@@ -184,7 +184,7 @@ class TeleopManager
if ( client_self_right_.call(srv) && srv.response.success ) {
ROS_INFO_STREAM("Service " << client_self_right_.getService() << " succeeded.");
} else {
- ROS_ERROR_STREAM("Service " << client_self_right_.getService() << " failed.");
+ ROS_ERROR_STREAM("Service " << client_self_right_.getService() << " failed. (" << srv.response.message << ")");
}
pressed_[button_self_right_] = true;
}
@@ -207,7 +207,7 @@ class TeleopManager
if ( client_sit_.call(srv) && srv.response.success ) {
ROS_INFO_STREAM("Service " << client_sit_.getService() << " succeeded.");
} else {
- ROS_ERROR_STREAM("Service " << client_sit_.getService() << " failed.");
+ ROS_ERROR_STREAM("Service " << client_sit_.getService() << " failed. (" << srv.response.message << ")");
}
pressed_[button_sit_] = true;
}
@@ -230,7 +230,7 @@ class TeleopManager
if ( client_stand_.call(srv) && srv.response.success ) {
ROS_INFO_STREAM("Service " << client_stand_.getService() << " succeeded.");
} else {
- ROS_ERROR_STREAM("Service " << client_stand_.getService() << " failed.");
+ ROS_ERROR_STREAM("Service " << client_stand_.getService() << " failed. (" << srv.response.message << ")");
}
pressed_[button_stand_] = true;
}
@@ -253,7 +253,7 @@ class TeleopManager
if ( client_stop_.call(srv) && srv.response.success ) {
ROS_INFO_STREAM("Service " << client_stop_.getService() << " succeeded.");
} else {
- ROS_ERROR_STREAM("Service " << client_stop_.getService() << " failed.");
+ ROS_ERROR_STREAM("Service " << client_stop_.getService() << " failed. (" << srv.response.message << ")");
}
pressed_[button_stop_] = true;
}
@@ -276,7 +276,7 @@ class TeleopManager
if ( client_release_.call(srv) && srv.response.success ) {
ROS_INFO_STREAM("Service " << client_release_.getService() << " succeeded.");
} else {
- ROS_ERROR_STREAM("Service " << client_release_.getService() << " failed.");
+ ROS_ERROR_STREAM("Service " << client_release_.getService() << " failed. (" << srv.response.message << ")");
}
pressed_[button_release_] = true;
}
@@ -299,7 +299,7 @@ class TeleopManager
if ( client_claim_.call(srv) && srv.response.success ) {
ROS_INFO_STREAM("Service " << client_claim_.getService() << " succeeded.");
} else {
- ROS_ERROR_STREAM("Service " << client_claim_.getService() << " failed.");
+ ROS_ERROR_STREAM("Service " << client_claim_.getService() << " failed. (" << srv.response.message << ")");
}
pressed_[button_claim_] = true;
}
@@ -328,7 +328,7 @@ class TeleopManager
ROS_INFO_STREAM("Service " << client_stair_mode_.getService() << " succeeded. set to " << req_next_stair_mode_.data);
req_next_stair_mode_.data = not req_next_stair_mode_.data;
} else {
- ROS_ERROR_STREAM("Service " << client_stair_mode_.getService() << " failed.");
+ ROS_ERROR_STREAM("Service " << client_stair_mode_.getService() << " failed. (" << srv.response.message << ")");
}
pressed_[button_stair_mode_] = true;
}
@@ -350,7 +350,7 @@ class TeleopManager
if (client_dock_.call(srv) && srv.response.success ){
ROS_INFO_STREAM("Service '" << client_dock_.getService() << "' succeeded.");
} else {
- ROS_ERROR_STREAM("Service '" << client_dock_.getService() << "' failed.");
+ ROS_ERROR_STREAM("Service '" << client_dock_.getService() << "' failed. (" << srv.response.message << ")");
}
pressed_axes_[axe_dock_] = true;
}
@@ -358,9 +358,9 @@ class TeleopManager
if (not pressed_axes_[axe_dock_]){
this->say("undock calling");
if (client_undock_.call(srv) && srv.response.success ){
- ROS_INFO("Service 'undock' succeeded.");
+ ROS_INFO_STREAM("Service '" << client_undock_.getService() << "' succeeded.");
} else {
- ROS_ERROR("Service 'undock' failed.");
+ ROS_ERROR_STREAM("Service '" << client_undock_.getService() << "' failed. (" << srv.response.message << ")");
}
pressed_axes_[axe_dock_] = true;
}
@@ -384,7 +384,7 @@ class TeleopManager
if (client_tuck_.call(srv) && srv.response.success ){
ROS_INFO_STREAM("Service '" << client_tuck_.getService() << "' succeeded.");
} else {
- ROS_ERROR_STREAM("Service '" << client_tuck_.getService() << "' failed.");
+ ROS_ERROR_STREAM("Service '" << client_tuck_.getService() << "' failed. (" << srv.response.message << ")");
}
pressed_axes_[axe_tuck_] = true;
}
@@ -394,7 +394,7 @@ class TeleopManager
if (client_untuck_.call(srv) && srv.response.success ){
ROS_INFO_STREAM("Service '" << client_untuck_.getService() << "' succeeded.");
} else {
- ROS_ERROR_STREAM("Service '" << client_untuck_.getService() << "' failed.");
+ ROS_ERROR_STREAM("Service '" << client_untuck_.getService() << "' failed. (" << srv.response.message << ")");
}
pressed_axes_[axe_tuck_] = true;
}
diff --git a/jsk_spot_robot/README.md b/jsk_spot_robot/README.md
new file mode 100644
index 0000000000..13696b4be1
--- /dev/null
+++ b/jsk_spot_robot/README.md
@@ -0,0 +1,149 @@
+jsk_spot_robot
+==============
+
+## Manuals
+
+- [Supported Documents of Boston Dynamics](https://www.bostondynamics.com/spot/training/documentation)
+- [Spot ROS User Documentation](http://www.clearpathrobotics.com/assets/guides/melodic/spot-ros/ros_usage.html#taking-control-of-the-robot)
+
+## Installation
+
+To setup a new internal PC and spot user, Please see [this page](./SetupInternalPCAndSpotUser.md).
+
+### How to set up a catkin workspace for a remote PC
+
+Create a workspace
+
+```bash
+source /opt/ros/melodic/setup.bash
+mkdir ~/spot_ws/src -p
+cd ~/spot_ws/src
+wstool init .
+wstool set jsk-ros-pkg/jsk_robot https://github.com/k-okada/jsk_robot.git --git -v spot_arm
+wstool update
+wstool merge -t . jsk-ros-pkg/jsk_robot/jsk_spot_robot/jsk_spot_user.rosinstall
+wstool update
+rosdep update
+rosdep install -y -r --from-paths . --ignore-src
+cd $HOME/spot_ws
+catkin init
+catkin build -j4 jsk_spot_startup spoteus
+```
+
+## How to run
+
+### Bringup spot
+
+First, please turn on spot and turn on motors according to [the OPERATION section of spot user guide](https://www.bostondynamics.com/sites/default/files/inline-files/spot-user-guide.pdf) and power on the internal PC.
+
+Basically, ros systemd services will start automatically. So you can use spot now.
+
+
+#### superviosur
+
+URI: http://:9001
+
+#### rwt_app_chooser
+
+URI: http://:8000/rwt_app_chooser
+
+### Development with a remote PC
+
+Please create `spot_ws` to your PC.
+
+First, connect your development PC's wifi adapter to Access point of the robot.
+
+And for every terminals in this section, Set your ROS_IP and ROS_MASTER_URI and source spot_ws.
+
+```
+rossetmaster
+rossetip
+source ~/spot_ws/devel/setup.bash
+```
+
+##### spoteus
+
+spoteus is roseus client for ROS Interface of spot_ros.
+
+Open a terminal, setting up it for spot and run roseus repl. ( emacs shell or euslime are recommended. )
+
+Then initialize it for spot
+
+```
+(load "package://spoteus/spot-interface.l")
+(spot-init)
+```
+
+You can now control spot from roseus.
+for example, when you want to move spot 1m forward, type.
+
+```
+(send *ri* :undock) ;; undock robot
+(send *spot* :reset-pose) ;; change robot pose, use (objects (list *spot*)) to visuailze
+(send *ri* :angle-vector (send *spot* :angle-vector) 2000 :default-controller) ;; send to real robot
+(send *ri* :stow-arm) ;; contorl onbody-api
+(send *ri* :sit)
+```
+
+### How to set up a catkin workspace in on-bodyPC
+
+First create user account into internal PC
+```
+ssh spotcore -l spot
+sudo adduser k-okada
+sudo adduser k-okada spot
+sudo adduser k-okada sudo
+```
+
+Create a workspace. Make sure that you need to login to spotcore with your account
+
+```bash
+ssh spotcore -l k-okada
+source /opt/ros/melodic/setup.bash
+source ~spot/spot_driver_ws/devel/setup.bash
+mkdir ~/spot_ws/src -p
+cd ~/spot_ws/src
+cd $HOME/spot_ws
+catkin init
+catkin config --cmake-args -DCMAKE_BUILD_TYPE=Release -DPYTHON_EXECUTABLE=/usr/bin/python3 -DPYTHON_INCLUDE_DIR=/usr/include/python3.6m -DPYTHON_LIBRARY=/usr/lib/x86_64-linux-gnu/libpython3.6m.so
+catkin build -j4 jsk_spot_startup spoteus
+echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
+echo "source ~/spot_ws/devel/setup.bash" >> ~/.bashrc
+```
+
+#### Run apps
+
+You can run apps manually, this is good for debugging your applications.
+```bash
+roscd jsk_spot_startup/apps/head_lead_demo roslaunch head_lead_demo.xml
+```
+
+#### Install apps
+If you would like to call your apps from rwt_app_chooser, you can
+
+## Connect Spot Robot
+
+There are 3 network interface in Spot Robot
+
+- Ethernet
+- WiFi
+- Payload
+
+### Ethernet
+
+Spot has ethernet port on its rear. its ip address is `10.0.0.3/24` by default. See [this article](https://support.bostondynamics.com/s/article/Spot-network-setup) for more details.
+
+You can open web console by accessing `https://-p.jsk.imi.i.u-tokyo.ac.jp` . You can connect `https://spot-BD--p.jsk.imi.i.u-tokyo.ac.jp`.
+
+### WiFi
+
+Spot has WiFi interface and it is usually used for table control. Its accesspoint is `spot-BD-` by default.
+You can connect web console by connecting its AP and connect ip of robot.
+
+### Payload
+
+Payload has ethernet port `192.168.50.3` by default. So if you have access to SpotCore and do port foward to `192.168.50.3:443` with some way ( e.g. Local forward of SSH ) You can connect robot web console through payload.
+
+For examples, if you can connect SpotCore by `ssh spot@spotcore.local`, you can forward access of robot to your local machine by `ssh spot@sporcore.local -L 443:192.168.50.3:443` and you can open webconsole by accesing `https://localhost:443`.
diff --git a/jsk_spot_robot/SetupInternalPCAndSpotUser.md b/jsk_spot_robot/SetupInternalPCAndSpotUser.md
new file mode 100644
index 0000000000..ab7f5a886a
--- /dev/null
+++ b/jsk_spot_robot/SetupInternalPCAndSpotUser.md
@@ -0,0 +1,258 @@
+# How to setup a internal PC and spot user
+
+This page describes how to setup a internal pc and spot user.
+
+## How to setup a [CORE I/O](https://dev.bostondynamics.com/docs/payload/coreio_documentation)
+
+The CORE I/O is desgined to use filesystem is read only and user Docekr or Spot Extensions for user applications.
+
+
+### Setup core-io users
+
+login with default password (ex: ssh -p 20022 10.0.0.3 -el spot)
+
+```
+# better to reboot on every command ????
+core-io$ passwd ... # change password
+core-io$ sudo usermod -a -G docker spot # add spot to docker group
+```
+
+### Setup development environment
+
+```
+core-io$ mkdir ~/spot_driver_ws/src -p
+core-io$ cd ~/spot_driver_ws/src
+core-io$ git clone https://github.com/k-okada/jsk_robot.git -b spot_arm
+core-io$ cd ~/spot_driver_ws/src/jsk_robot/jsk_spot_robot/coreio/base
+core-io$ make pre_build catkin_build dev_build all
+```
+This procedure create `~/bash.sh`. Please use this script when you start development.
+
+### Setup wifi interfaces
+
+Use [TP-Link AC600 wireless Realtek RTL8811AU Archer T2U Nano](https://www.amazon.co.jp/gp/product/B07MXHJ6KB/ref=ppx_yo_dt_b_asin_title_o01_s00?ie=UTF8&psc=1)
+```
+$ dmesg
+[ 7.305827] usb 1-2.1.1: new high-speed USB device number 5 using tegra-xusb
+[ 7.326404] usb 1-2.1.1: New USB device found, idVendor=2357, idProduct=011e
+[ 7.326553] usb 1-2.1.1: New USB device strings: Mfr=1, Product=2, SerialNumber=3
+[ 7.326681] usb 1-2.1.1: Product: 802.11ac WLAN Adapter
+[ 7.326781] usb 1-2.1.1: Manufacturer: Realtek
+$ lsusb
+Bus 001 Device 005: ID 2357:011e
+```
+
+Make sure that the roming configuration works correctly (from core-io)
+```
+core-io$ sudo wpa_cli get_network 0 bgscan
+Selected interface 'wlxac15a246e382'
+"simple:30:-80:86400"
+```
+This scan every 30 seconds, when signal is below -80, and 86400 seconds (24 hours) otherwise.
+
+### Setup Joystick
+
+[Push PS and (left-top small) create button to enter pairing mode](https://www.playstation.com/en-us/support/hardware/pair-dualsense-controller-bluetooth/#blue)
+```
+$ hcitool dev
+Devices:
+ hci0 00:1B:DC:0D:D0:AD
+$ hcitool -i hci0 scan
+Scanning ...
+ D0:BC:C1:CB:48:37 Wireless Controller
+$ sudo bluetoothctl
+[bluetooth]# pair D0:BC:C1:CB:48:37
+[bluetooth]# trust D0:BC:C1:CB:48:37
+[bluetooth]# connect D0:BC:C1:CB:48:37
+
+```
+
+
+## Settings for SPOT CORE (x86_64)
+
+## wifi settings [Wi-Fi roaming aggressiveness configuration](https://github.com/jsk-ros-pkg/jsk_robot/issues/1598#issuecomment-1247533330)
+
+```
+$ git clone https://github.com/cilynx/rtl88x2bu.git
+cd rtl88x2bu
+./deply.sh
+echo 88x2bu | sudo tee /etc/modules-load.d/88x2bu.conf # to startup on boot time
+echo 'install 88x2bu /sbin/modprobe -i 88x2bu && { /sbin/wpa_cli set_network 0 bgscan "\\"simple:5:-50:3000\\"";}' | sudo tee /etc/modprobe.d/88x2bu.conf # run set_network when load module
+
+sudo nmtui # to configure network
+```
+
+### Setup timezone
+
+```
+sudo timedatectl set-timezone Asia/Tokyo
+```
+
+
+## How to set up the spot user
+
+First, create your user account to internal PC.
+
+```
+ssh spot-BD-xxxxxxxx-p.jsk.imi.i.u-tokyo.ac.jp -l spot -p 20022
+sudo adduser k-okada
+sudo adduser k-okada spot
+
+```
+
+If you are the first user to use spotcore, add `spot` user to sudo group. If someone already using the spotcore, you can skip this section
+
+```
+sudo gpasswd -a spot sudo
+```
+
+To install systemd service, run following commands. Note that this script start launch file of user's workspace, so usually we expect to run from spot users.
+```
+rosrun robot_upstart install --provider supervisor --supervisor-priority 10 --roscore
+rosrun robot_upstart install --provider supervisor --supervisor-priority 300 --symlink --wait --job jsk_spot_startup jsk_spot_startup/launch/jsk_spot_bringup.launch credential_config:=$(rospack find jsk_spot_startup)/auth/spot_credential.yaml use_app_manager:=false
+rosrun robot_upstart install --provider supervisor --supervisor-priority 400 --symlink --wait --job app_manager jsk_robot_startup/lifelog/app_manager.launch use_applist:=false respawn:=false
+```
+
+To check output of roslaunch output, please try
+```
+sudo supervisorctl tail -f jsk_spot_startup stdout
+sudo supervisorctl tail -f jsk_spot_startup stderr
+```
+
+You can connect to the supervisor console from https://spotcore.jsk.imi.i.u-tokyo.ac.jp:9001/
+
+systemd services of JSK Spot system use workspaces in `spot` user.
+
+- `spot_driver_ws`: a workspace to run driver.launch. which requires python3 build version of geometry3
+
+### Prerequities
+
+Install necessary packages for workspace building
+
+```
+sudo apt-get install python3-catkin-pkg-modules python3-rospkg-modules python3-venv python3-empy python3-opencv python3-sip-dev python3-defusedxml
+sudo apt-get install ros-melodic-catkin ros-melodic-vision-msgs
+```
+
+
+### setting up `spot_driver_ws`
+
+Create a workspace for `spot_driver`.
+
+```bash
+source /opt/ros/melodic/setup.bash
+mkdir ~/spot_driver_ws/src -p
+cd ~/spot_driver_ws/src
+wstool init .
+wstool set jsk-ros-pkg/jsk_robot https://github.com/jsk-ros-pkg/jsk_robot.git --git
+wstool update
+wstool merge -t . jsk-ros-pkg/jsk_robot/jsk_spot_robot/jsk_spot_driver.rosinstall
+wstool update
+rosdep update
+rosdep install -y -r --from-paths . --ignore-src
+pip3 install -r jsk-ros-pkg/jsk_robot/jsk_spot_robot/requirements.txt
+cd ~/spot_driver_ws
+catkin init
+catkin config --cmake-args -DCMAKE_BUILD_TYPE=Release -DPYTHON_EXECUTABLE=/usr/bin/python3 -DPYTHON_INCLUDE_DIR=/usr/include/python3.6m -DPYTHON_LIBRARY=/usr/lib/x86_64-linux-gnu/libpython3.6m.so
+catkin build -j4 tf2_ros cv_bridge jsk_spot_startup spoteus robot_upstart
+```
+
+After this, please modify the credential files for spot_driver.
+
+```bash
+roscd jsk_spot_startup
+# modify auth/credential_config.yaml
+git update-index --skip-worktree auth/spot_credential.yaml
+```
+
+Note that `rosdep install ...` did not install all dependencies, you need to install `python3-` modules manualy. or run `ROS_PYTHON_VERSION=3 rosdep install ...`. But this will install `python3-catkin-pkg` which remove `python2-catkin-pkg` package and all `ros-melodic-*` packages.
+
+Workaround is to install only jsk_robot direcotry. (But you still re-install `ros-melodic-jsk-tools`)
+```
+ROS_PYTHON_VERSION=3 rosdep install -r --from-paths ~/spot_driver_ws/src/jsk_robot --ignore-src
+```
+or create dummy package that did not conflict each other.
+
+```
+#!/bin/bash
+
+set -x
+set -e
+
+TMPDIR=/tmp/tmp-$$
+
+mkdir ${TMPDIR}
+cd ${TMPDIR}
+apt download python3-catkin-pkg
+dpkg-deb -R python3-catkin-pkg_0.5.2-100_all.deb ${TMPDIR}/src-python3-catkin-pkg
+rm -fr ${TMPDIR}/src-python3-catkin-pkg/usr/bin/
+sed -i /^Conflicts:/d ${TMPDIR}/src-python3-catkin-pkg/DEBIAN/control
+sed -i '/^Version:/ s/$/0/' ${TMPDIR}/src-python3-catkin-pkg/DEBIAN/control
+cat ${TMPDIR}/src-python3-catkin-pkg/DEBIAN/control
+# edit DEBIAN/postinst
+dpkg-deb -b ${TMPDIR}/src-python3-catkin-pkg python3-catkin-pkg-dummy.deb
+
+apt download python-catkin-pkg
+dpkg-deb -R python-catkin-pkg_0.5.2-100_all.deb ${TMPDIR}/src-python2-catkin-pkg
+rm -fr ${TMPDIR}/src-python2-catkin-pkg/usr/bin/
+sed -i 's/, python3-catkin-pkg//' ${TMPDIR}/src-python2-catkin-pkg/DEBIAN/control
+sed -i '/^Version:/ s/$/0/' ${TMPDIR}/src-python2-catkin-pkg/DEBIAN/control
+cat ${TMPDIR}/src-python2-catkin-pkg/DEBIAN/control
+# edit DEBIAN/postinst
+dpkg-deb -b ${TMPDIR}/src-python2-catkin-pkg python2-catkin-pkg-no-conflict.deb
+
+apt download python3-rosdep
+dpkg-deb -R python3-rosdep_0.22.1-1_all.deb ${TMPDIR}/src-python3-rosdep
+rm -fr ${TMPDIR}/src-python3-rosdep/usr/bin/
+sed -i /^Conflicts:/d ${TMPDIR}/src-python3-rosdep/DEBIAN/control
+sed -i '/^Version:/ s/$/0/' ${TMPDIR}/src-python3-rosdep/DEBIAN/control
+cat ${TMPDIR}/src-python3-rosdep/DEBIAN/control
+# edit DEBIAN/postinst
+dpkg-deb -b ${TMPDIR}/src-python3-rosdep python3-rosdep-dummy.deb
+
+apt download python-rosdep
+dpkg-deb -R python-rosdep_0.22.1-1_all.deb ${TMPDIR}/src-python-rosdep
+rm -fr ${TMPDIR}/src-python-rosdep/usr/bin/
+sed -i 's/, python3-rosdep//' ${TMPDIR}/src-python-rosdep/DEBIAN/control
+sed -i '/^Version:/ s/$/0/' ${TMPDIR}/src-python-rosdep/DEBIAN/control
+cat ${TMPDIR}/src-python-rosdep/DEBIAN/control
+# edit DEBIAN/postinst
+dpkg-deb -b ${TMPDIR}/src-python-rosdep python-rosdep-no-conflict.deb
+
+set +x
+echo "scp ${TMPDIR}/python2-catkin-pkg-no-conflict.deb to your environment"
+echo "scp ${TMPDIR}/python3-catkin-pkg-dummy.deb to your environment"
+echo "scp ${TMPDIR}/python-rosdep-no-conflict.deb to your environment"
+echo "scp ${TMPDIR}/python3-rosdep-dummy.deb to your environment"
+```
+
+## Troubleshootig
+
+### Joystick did not respond
+
+Check `Setup Joystick` section and reconnet bluetooth
+
+### Wifi did not connec
+
+Check [roaming aggressiveness configuration](https://github.com/jsk-ros-pkg/jsk_robot/issues/1598)
+```
+$ wpa_cli get_network 0 bgscan
+```
+
+This tells roaming configuation, for example below setting means it scan every 5 seconds when the signal is weak (below -50), and every 3600 seconds otherwise.
+```
+$ wpa_cli set_network 0 bgscan "\"simple:5:-50:3000\""
+```
+
+You can also check the output of wpa_supplicant.
+```
+$ journalctl -u wpa_supplicant -f
+```
+
+### rwt_app_chooser did not respond
+
+http://spotcore:8000/rwt_app_chooser/#!task/ did not show any apps, and following command did not returns any apps, make sure that you have run `rosdep update`.
+
+```
+$ rosservice call /SpotCORE/list_apps
+```
diff --git a/jsk_spot_robot/coreio/base/Dockerfile b/jsk_spot_robot/coreio/base/Dockerfile
new file mode 100644
index 0000000000..0464b2e58d
--- /dev/null
+++ b/jsk_spot_robot/coreio/base/Dockerfile
@@ -0,0 +1,80 @@
+#####
+## Setup development environment
+#####
+##### Use sha256 as of 2023/03/16
+FROM arm64v8/ros:melodic-robot@sha256:c0a0a8a25dc822ea48b40c45d74b267ddf4dbe22b8accc9fd66bb146c34eb974 AS base_build
+ENV DEBIAN_FRONTEND noninteractive
+
+# development tools
+RUN apt-get update && apt install -y -q python3-catkin-pkg-modules python3-rospkg-modules python3-venv python3-pip python3-empy python3-opencv python3-sip-dev python3-defusedxml cython3
+
+# network tools
+RUN apt-get update && apt install -y -q net-tools iputils-ping dnsutils traceroute curl
+
+# ROS packages
+RUN apt-get update && apt install -y -q ros-melodic-catkin ros-melodic-vision-msgs
+
+# setup user space
+RUN sed -i 's@%sudo\s*ALL=(ALL:ALL)\s*ALL@%sudo ALL=(ALL:ALL) NOPASSWD: ALL@' /etc/sudoers
+RUN useradd -ms /bin/bash spot
+RUN echo spot:spot | chpasswd
+RUN adduser spot sudo
+USER spot
+WORKDIR /home/spot
+RUN rosdep update -y
+
+# get dummy workspace to install dpeendent packages
+RUN mkdir -p /tmp/ws/src/jsk_robot/jsk_spot_robot/jsk_spot_startup /tmp/ws/src/jsk_robot/jsk_spot_robot/spoteus
+COPY src/jsk_robot/jsk_spot_robot/jsk_spot_startup/package.xml /tmp/ws/src/jsk_robot/jsk_spot_robot/jsk_spot_startup/
+COPY src/jsk_robot/jsk_spot_robot/spoteus/package.xml /tmp/ws/src/jsk_robot/jsk_spot_robot/spoteus/
+COPY src/jsk_robot/jsk_spot_robot/requirements.txt /tmp/ws/src/jsk_robot/jsk_spot_robot/
+
+# install pip3 dependencies
+RUN pip3 install pip==21.3.1
+RUN pip3 install wrapt==1.12.1 six==1.15.0 PyJWT==2.0.0 numpy==1.19.4 grpcio==1.34.0
+
+# install python requirements
+RUN pip3 install -r /tmp/ws/src/jsk_robot/jsk_spot_robot/requirements.txt
+
+# rosdep install
+RUN rosdep install -y -r --from-paths /tmp/ws/src --ignore-src --rosdistro melodic || echo "OK"
+
+#####
+## Initialize catkin workspace after wstool merge and update with jsk_spot_robot/jsk_spot_driver.rosinstall
+#####
+FROM base_build AS pre_build
+
+# setup catkin develeopment environment with mounted workspace
+COPY package.xml.tar /tmp/
+RUN tar -C /tmp/ws/ -xvf /tmp/package.xml.tar
+RUN rosdep install -y -r --from-paths /tmp/ --ignore-src --rosdistro melodic || echo "OK"
+##
+## 'RUN --mount' called everytime when conttnes of spot/ws changed, so use 'COPY'
+#RUN --mount=type=bind,source=/,target=/home/spot/ws cd ws && rosdep install -y -r --from-paths src --ignore-src --rosdistro melodic || echo "OK"
+
+
+#####
+## User preferences for developent tools
+#####
+FROM pre_build AS dev_build
+RUN sudo apt install -y -q python-catkin-tools less emacs vim
+
+RUN sudo apt install -y -q bluez bluez-tools
+
+RUN echo "#!/bin/bash" > /home/spot/ros_entrypoint.sh && \
+ echo "set -e" >> /home/spot/ros_entrypoint.sh && \
+ echo "source /opt/ros/melodic/setup.bash --" >> /home/spot/ros_entrypoint.sh && \
+ echo "source /home/spot/ws/devel/setup.bash --" >> /home/spot/ros_entrypoint.sh && \
+ echo "sudo service dbus start" >> /home/spot/ros_entrypoint.sh && \
+ echo "sudo bluetoothd &" >> /home/spot/ros_entrypoint.sh && \
+ echo "exec \"\$@\"" >> /home/spot/ros_entrypoint.sh
+
+RUN chmod u+x /home/spot/ros_entrypoint.sh
+
+### FIXME ros_entrypoint did not work with roscd
+RUN echo "source /opt/ros/melodic/share/rosbash/rosbash" >> ~/.bashrc
+
+ENV TZ=Asia/Tokyo
+
+ENTRYPOINT ["/home/spot/ros_entrypoint.sh"]
+CMD ["bash"]
diff --git a/jsk_spot_robot/coreio/base/Makefile b/jsk_spot_robot/coreio/base/Makefile
new file mode 100644
index 0000000000..ed00da7df5
--- /dev/null
+++ b/jsk_spot_robot/coreio/base/Makefile
@@ -0,0 +1,49 @@
+all: $(HOME)/bash.sh
+ @echo "make build: build docker for spot user"
+
+$(HOME)/bash.sh:
+ echo "#!/bin/bash\n\ncd ~/spot_driver_ws/src/jsk_robot/jsk_spot_robot/coreio/base\nmake shell\n" > $(HOME)/bash.sh
+ chmod u+x $(HOME)/bash.sh
+
+
+WS_ROOT=$(abspath $(CURDIR)/../../../../../)
+
+define run
+docker run --rm --privileged --hostname strelka --add-host strelka:133.11.216.166 --add-host strelka.jsk.imi.i.u-tokyo.ac.jp:133.11.216.166 --network=host --device=/dev/input -v $(WS_ROOT):/home/spot/ws -v $(HOME)/.ros:/home/spot/.ros -w /home/spot/ws -ti dev_env ${1};
+endef
+define docker_run
+${1}
+endef
+
+pre_build:
+ # make .ros file
+ mkdir -p ~/.ros
+ # build base file
+ cp Dockerfile $(WS_ROOT)
+ cd $(WS_ROOT); DOCKER_BUILDKIT=1 docker build --target base_build --progress=plain --network=host -t dev_env -f Dockerfile .
+ $(call run, /bin/ls -al src)
+ # copy workspaces
+ if [ ! -e $(WS_ROOT)/src/.rosinstall ]; then $(call run, wstool init src) fi
+ $(call run, wstool merge -t src src/jsk_robot/jsk_spot_robot/jsk_spot_driver.rosinstall)
+ $(call run, wstool update -t src)
+ # rosdep install all
+ cd $(WS_ROOT); DOCKER_BUILDKIT=1 docker build --target pre_build --progress=plain --network=host -t dev_env -f Dockerfile .
+ rm $(WS_ROOT)/Dockerfile
+
+dev_build:
+ cp Dockerfile $(WS_ROOT)
+ cd $(WS_ROOT); [ -e package.xml.tar ] || find src -iname 'package.xml' | tar cf package.xml.tar -T -
+ cd $(WS_ROOT); DOCKER_BUILDKIT=1 docker build --target dev_build --progress=plain --network=host -t dev_env -f Dockerfile .
+ rm $(WS_ROOT)/Dockerfile $(WS_ROOT)/package.xml.tar
+
+catkin_build:
+ $(call run, catkin init)
+ $(call run, catkin config --cmake-args -DCMAKE_BUILD_TYPE=Release -DPYTHON_EXECUTABLE=/usr/bin/python3 -DPYTHON_INCLUDE_DIR=/usr/include/python3.6m -DPYTHON_LIBRARY=/usr/lib/aarch64-linux-gnu/libpython3.6m.so.1)
+ $(call run, catkin build)
+
+
+shell:
+ $(call run, bash)
+
+emacs:
+ $(call run, emacs -nw)
diff --git a/jsk_spot_robot/coreio/network_compute_server/0_setup.sh b/jsk_spot_robot/coreio/network_compute_server/0_setup.sh
new file mode 100755
index 0000000000..4b555ad992
--- /dev/null
+++ b/jsk_spot_robot/coreio/network_compute_server/0_setup.sh
@@ -0,0 +1,5 @@
+#!/bin/bash
+
+## see https://dev.bostondynamics.com/docs/python/fetch_tutorial/fetch1
+
+. ~/my_spot_env/bin/activate
diff --git a/jsk_spot_robot/coreio/network_compute_server/1_capture.sh b/jsk_spot_robot/coreio/network_compute_server/1_capture.sh
new file mode 100755
index 0000000000..e96128ac60
--- /dev/null
+++ b/jsk_spot_robot/coreio/network_compute_server/1_capture.sh
@@ -0,0 +1,17 @@
+#!/bin/bash
+
+## see https://dev.bostondynamics.com/docs/python/fetch_tutorial/fetch1
+
+set -x
+rm -fr dogtoy/images/*
+
+trap "exit" INT TERM ERR
+trap "kill 0" EXIT
+
+python capture_images.py 10.0.0.3 --image-source frontleft_fisheye_image --folder dogtoy/images &
+python capture_images.py 10.0.0.3 --image-source frontright_fisheye_image --folder dogtoy/images &
+python capture_images.py 10.0.0.3 --image-source left_fisheye_image --folder dogtoy/images &
+python capture_images.py 10.0.0.3 --image-source right_fisheye_image --folder dogtoy/images &
+python capture_images.py 10.0.0.3 --image-source back_fisheye_image --folder dogtoy/images &
+
+wait
diff --git a/jsk_spot_robot/coreio/network_compute_server/2_split.sh b/jsk_spot_robot/coreio/network_compute_server/2_split.sh
new file mode 100755
index 0000000000..201830d8b1
--- /dev/null
+++ b/jsk_spot_robot/coreio/network_compute_server/2_split.sh
@@ -0,0 +1,4 @@
+#!/bin/bash
+
+mv dogtoy/images/*.xml dogtoy/annotations/
+python split_dataset.py --labels-dir dogtoy/annotations/ --output-dir dogtoy/annotations/ --ratio 0.9
diff --git a/jsk_spot_robot/coreio/network_compute_server/3_convert.sh b/jsk_spot_robot/coreio/network_compute_server/3_convert.sh
new file mode 100755
index 0000000000..155949ff77
--- /dev/null
+++ b/jsk_spot_robot/coreio/network_compute_server/3_convert.sh
@@ -0,0 +1,7 @@
+#!/bin/bash
+
+## see https://dev.bostondynamics.com/docs/python/fetch_tutorial/fetch1
+
+python generate_tfrecord.py --xml_dir dogtoy/annotations/train --image_dir dogtoy/images --labels_path dogtoy/annotations/label_map.pbtxt --output_path dogtoy/annotations/train.record
+python generate_tfrecord.py --xml_dir dogtoy/annotations/test --image_dir dogtoy/images --labels_path dogtoy/annotations/label_map.pbtxt --output_path dogtoy/annotations/test.record
+
diff --git a/jsk_spot_robot/coreio/network_compute_server/4_train.sh b/jsk_spot_robot/coreio/network_compute_server/4_train.sh
new file mode 100755
index 0000000000..ece266b850
--- /dev/null
+++ b/jsk_spot_robot/coreio/network_compute_server/4_train.sh
@@ -0,0 +1,8 @@
+#!/bin/bash
+
+## see https://dev.bostondynamics.com/docs/python/fetch_tutorial/fetch1
+
+python model_main_tf2.py --model_dir=dogtoy/models/dogtoy_ssd_resnet50_v1_fpn --pipeline_config_path=dogtoy/models/dogtoy_ssd_resnet50_v1_fpn/pipeline.config --num_train_steps=20000
+# CUDA_VISIBLE_DEVICES="-1" python model_main_tf2.py --model_dir=dogtoy/models/dogtoy_ssd_resnet50_v1_fpn --pipeline_config_path=dogtoy/models/dogtoy_ssd_resnet50_v1_fpn/pipeline.config --checkpoint_dir=dogtoy/models/dogtoy_ssd_resnet50_v1_fpn
+mkdir -p dogtoy/exported-models/dogtoy-model
+python exporter_main_v2.py --input_type image_tensor --pipeline_config_path dogtoy/models/dogtoy_ssd_resnet50_v1_fpn/pipeline.config --trained_checkpoint_dir dogtoy/models/dogtoy_ssd_resnet50_v1_fpn/ --output_directory dogtoy/exported-models/dogtoy-model
diff --git a/jsk_spot_robot/coreio/network_compute_server/5_run.sh b/jsk_spot_robot/coreio/network_compute_server/5_run.sh
new file mode 100755
index 0000000000..03b51fd747
--- /dev/null
+++ b/jsk_spot_robot/coreio/network_compute_server/5_run.sh
@@ -0,0 +1,6 @@
+#!/bin/bash
+
+## see https://dev.bostondynamics.com/docs/python/fetch_tutorial/fetch1
+
+python network_compute_server.py -m dogtoy/exported-models/dogtoy-model/saved_model dogtoy/annotations/label_map.pbtxt 10.0.0.3
+
diff --git a/jsk_spot_robot/coreio/network_compute_server/6_build_ext.sh b/jsk_spot_robot/coreio/network_compute_server/6_build_ext.sh
new file mode 100755
index 0000000000..ed260c2d1b
--- /dev/null
+++ b/jsk_spot_robot/coreio/network_compute_server/6_build_ext.sh
@@ -0,0 +1,31 @@
+#!/bin/bash -ex
+
+## https://dev.bostondynamics.com/docs/python/fetch_tutorial/fetch6
+## https://dev.bostondynamics.com/docs/python/fetch_tutorial/files/coreio_extension/create_extension.sh
+
+mkdir -p data
+rm -rf data/*
+# Dogtoy model
+cp -r ./dogtoy/exported-models/dogtoy-model data/.
+# and its label map
+cp ./dogtoy/annotations/label_map.pbtxt data/dogtoy-model/.
+# coco model (includes its label map)
+cp -r ./dogtoy/pre-trained-models/ssd_resnet50_v1_fpn_640x640_coco17_tpu-8 data/.
+cp ./models-with-protos/research/object_detection/data/mscoco_label_map.pbtxt data/ssd_resnet50_v1_fpn_640x640_coco17_tpu-8/
+
+# Build the image
+docker build -t object_detection_coco:l4t -f Dockerfile.l4t .
+
+# Exports the image, uses pigz
+docker save object_detection_coco:l4t | pigz > object_detection_coco_image.tar.gz
+
+# Built the Spot Extension by taring all the files together
+tar -cvzf object_detection_coco.spx \
+ object_detection_coco_image.tar.gz \
+ manifest.json \
+ docker-compose.yml \
+ data
+
+# Cleanup intermediate image
+rm object_detection_coco_image.tar.gz
+rm -fr data
diff --git a/jsk_spot_robot/coreio/network_compute_server/Dockerfile.l4t b/jsk_spot_robot/coreio/network_compute_server/Dockerfile.l4t
new file mode 100644
index 0000000000..f5ba4ae1bc
--- /dev/null
+++ b/jsk_spot_robot/coreio/network_compute_server/Dockerfile.l4t
@@ -0,0 +1,22 @@
+# Use a base image provided by nvidia that already contains tensorflow 2.5
+FROM nvcr.io/nvidia/l4t-tensorflow:r32.7.1-tf2.7-py3
+
+# Do some basic apt and pip updating
+RUN apt-get update && \
+ apt-get install -y --no-install-recommends python3-pip && \
+ apt-get clean
+
+# Copy over the python requirements file and our prebuilt models API library
+COPY docker-requirements.txt prebuilt/*.whl ./
+COPY models-with-protos models-with-protos
+
+# Install the python requirements
+RUN python3 -m pip install pip==21.3.1 setuptools==59.6.0 wheel==0.37.1 && \
+ python3 -m pip install -r docker-requirements.txt --find-links .
+
+# Copy over our main script
+COPY network_compute_server.py /app/
+WORKDIR /app
+
+# Set our script as the main entrypoint for the container
+ENTRYPOINT ["python3", "network_compute_server.py"]
diff --git a/jsk_spot_robot/coreio/network_compute_server/docker-compose.yml b/jsk_spot_robot/coreio/network_compute_server/docker-compose.yml
new file mode 100644
index 0000000000..72a9437ea1
--- /dev/null
+++ b/jsk_spot_robot/coreio/network_compute_server/docker-compose.yml
@@ -0,0 +1,26 @@
+version: "3.5"
+services:
+ object_detection_coco:
+ image: object_detection_coco:l4t
+ network_mode: host
+ restart: unless-stopped
+ environment:
+ # This package couldn't be installed, but putting it on the path allows required access to the protos.
+ - PYTHONPATH=/models-with-protos/research/
+ volumes:
+ # Mount payload credentials.
+ - /opt/payload_credentials/payload_guid_and_secret:/opt/payload_credentials/payload_guid_and_secret
+ # and ML models
+ - /data/.extensions/object_detection_coco/data:/data
+ # The command below is partial because the docker image is already configured with an entrypoint.
+ command: >
+ -m /data/dogtoy-model/saved_model /data/dogtoy-model/label_map.pbtxt
+ -m /data/ssd_resnet50_v1_fpn_640x640_coco17_tpu-8/saved_model /data/ssd_resnet50_v1_fpn_640x640_coco17_tpu-8/mscoco_label_map.pbtxt
+ --payload-credentials-file /opt/payload_credentials/payload_guid_and_secret
+ 192.168.50.3
+ deploy:
+ resources:
+ reservations:
+ devices:
+ - driver: nvidia
+ capabilities: [gpu]
diff --git a/jsk_spot_robot/coreio/network_compute_server/docker-requirements.txt b/jsk_spot_robot/coreio/network_compute_server/docker-requirements.txt
new file mode 100644
index 0000000000..12c96e14fe
--- /dev/null
+++ b/jsk_spot_robot/coreio/network_compute_server/docker-requirements.txt
@@ -0,0 +1,40 @@
+bosdyn-api==3.2.0
+ # via
+ # bosdyn-client
+ # bosdyn-core
+bosdyn-client==3.2.0
+ # via -r requirements.txt
+bosdyn-core==3.2.0
+ # via bosdyn-client
+certifi==2022.5.18.1
+ # via requests
+charset-normalizer==2.0.12
+ # via requests
+deprecated==1.2.13
+ # via
+ # bosdyn-client
+ # bosdyn-core
+grpcio
+ #==1.46.3 (conflicts with base image)
+ # via bosdyn-client
+idna==3.3
+ # via requests
+numpy==1.19.4
+ # via bosdyn-client
+protobuf==3.19.4
+ # via bosdyn-api
+pyjwt==2.4.0
+ # via bosdyn-client
+requests==2.27.1
+ # via bosdyn-client
+six
+ #==1.16.0 (conflicts with base image)
+ # via grpcio
+urllib3==1.26.9
+ # via requests
+wrapt
+ #==1.14.1 (conflicts with base image)
+ # via deprecated
+Pillow==8.4.0
+opencv-python==4.6.0.66
+ # via network_compute_server.py
\ No newline at end of file
diff --git a/jsk_spot_robot/coreio/network_compute_server/manifest.json b/jsk_spot_robot/coreio/network_compute_server/manifest.json
new file mode 100644
index 0000000000..d762e573d0
--- /dev/null
+++ b/jsk_spot_robot/coreio/network_compute_server/manifest.json
@@ -0,0 +1,7 @@
+{
+ "description": "object_detection_coco",
+ "version": "3.2.0",
+ "images": [
+ "object_detection_coco_image.tar.gz"
+ ]
+}
diff --git a/jsk_spot_robot/coreio/network_compute_server/network_compute_server.py b/jsk_spot_robot/coreio/network_compute_server/network_compute_server.py
new file mode 100644
index 0000000000..d600d51577
--- /dev/null
+++ b/jsk_spot_robot/coreio/network_compute_server/network_compute_server.py
@@ -0,0 +1,312 @@
+# Copyright (c) 2022 Boston Dynamics, Inc. All rights reserved.
+#
+# Downloading, reproducing, distributing or otherwise using the SDK Software
+# is subject to the terms and conditions of the Boston Dynamics Software
+# Development Kit License (20191101-BDSDK-SL).
+
+import argparse
+import io
+import os
+import sys
+import time
+import logging
+
+import cv2
+from PIL import Image
+import numpy as np
+
+from bosdyn.api import network_compute_bridge_service_pb2_grpc
+from bosdyn.api import network_compute_bridge_pb2
+from bosdyn.api import image_pb2
+from bosdyn.api import header_pb2
+import bosdyn.client
+import bosdyn.client.util
+import grpc
+from concurrent import futures
+import tensorflow as tf
+
+import queue
+import threading
+from google.protobuf import wrappers_pb2
+from object_detection.utils import label_map_util
+
+kServiceAuthority = "object-detection-coco-worker.spot.robot"
+
+
+class TensorFlowObjectDetectionModel:
+ def __init__(self, model_path, label_path):
+ self.detect_fn = tf.saved_model.load(model_path)
+ self.category_index = label_map_util.create_category_index_from_labelmap(label_path, use_display_name=True)
+ self.name = os.path.basename(os.path.dirname(model_path))
+
+ def predict(self, image):
+ input_tensor = tf.convert_to_tensor(image)
+ input_tensor = input_tensor[tf.newaxis, ...]
+ detections = self.detect_fn(input_tensor)
+
+ return detections
+
+def process_thread(args, request_queue, response_queue):
+ # Load the model(s)
+ models = {}
+ for model in args.model:
+ this_model = TensorFlowObjectDetectionModel(model[0], model[1])
+ models[this_model.name] = this_model
+
+ print('')
+ print('Service ' + args.name + ' running on port: ' + str(args.port))
+
+ print('Loaded models:')
+ for model_name in models:
+ print(' ' + model_name)
+
+ while True:
+ request = request_queue.get()
+
+ if isinstance(request, network_compute_bridge_pb2.ListAvailableModelsRequest):
+ out_proto = network_compute_bridge_pb2.ListAvailableModelsResponse()
+ for model_name in models:
+ out_proto.available_models.append(model_name)
+ if models[model_name].category_index is not None:
+ labels_msg = out_proto.labels.add()
+ labels_msg.model_name = model_name
+ for n in models[model_name].category_index.keys():
+ labels_msg.available_labels.append(models[model_name].category_index[n]['name'])
+ response_queue.put(out_proto)
+ continue
+ else:
+ out_proto = network_compute_bridge_pb2.NetworkComputeResponse()
+
+ # Find the model
+ if request.input_data.model_name not in models:
+ err_str = 'Cannot find model "' + request.input_data.model_name + '" in loaded models.'
+ print(err_str)
+
+ # Set the error in the header.
+ out_proto.header.error.code = header_pb2.CommonError.CODE_INVALID_REQUEST
+ out_proto.header.error.message = err_str
+ response_queue.put(out_proto)
+ continue
+
+ model = models[request.input_data.model_name]
+
+ # Unpack the incoming image.
+ if request.input_data.image.format == image_pb2.Image.FORMAT_RAW:
+ pil_image = Image.open(io.BytesIO(request.input_data.image.data))
+ if request.input_data.image.pixel_format == image_pb2.Image.PIXEL_FORMAT_GREYSCALE_U8:
+ # If the input image is grayscale, convert it to RGB.
+ image = cv2.cvtColor(pil_image, cv2.COLOR_GRAY2RGB)
+
+ elif request.input_data.image.pixel_format == image_pb2.Image.PIXEL_FORMAT_RGB_U8:
+ # Already an RGB image.
+ image = pil_image
+
+ else:
+ print('Error: image input in unsupported pixel format: ', request.input_data.image.pixel_format)
+ response_queue.put(out_proto)
+ continue
+
+ elif request.input_data.image.format == image_pb2.Image.FORMAT_JPEG:
+ dtype = np.uint8
+ jpg = np.frombuffer(request.input_data.image.data, dtype=dtype)
+ image = cv2.imdecode(jpg, -1)
+
+ if len(image.shape) < 3:
+ # If the input image is grayscale, convert it to RGB.
+ image = cv2.cvtColor(image, cv2.COLOR_GRAY2RGB)
+
+ image_width = image.shape[0]
+ image_height = image.shape[1]
+
+ detections = model.predict(image)
+
+ num_objects = 0
+
+ # All outputs are batches of tensors.
+ # Convert to numpy arrays, and take index [0] to remove the batch dimension.
+ # We're only interested in the first num_detections.
+ num_detections = int(detections.pop('num_detections'))
+ detections = {key: value[0, :num_detections].numpy()
+ for key, value in detections.items()}
+
+ boxes = detections['detection_boxes']
+ classes = detections['detection_classes']
+ scores = detections['detection_scores']
+
+
+ for i in range(boxes.shape[0]):
+ if scores[i] < request.input_data.min_confidence:
+ continue
+
+ box = tuple(boxes[i].tolist())
+
+ # Boxes come in with normalized coordinates. Convert to pixel values.
+ box = [box[0] * image_width, box[1] * image_height, box[2] * image_width, box[3] * image_height]
+
+ score = scores[i]
+
+ if classes[i] in model.category_index.keys():
+ label = model.category_index[classes[i]]['name']
+ else:
+ label = 'N/A'
+
+ num_objects += 1
+
+ print('Found object with label: "' + label + '" and score: ' + str(score))
+
+
+ point1 = np.array([box[1], box[0]])
+ point2 = np.array([box[3], box[0]])
+ point3 = np.array([box[3], box[2]])
+ point4 = np.array([box[1], box[2]])
+
+ # Add data to the output proto.
+ out_obj = out_proto.object_in_image.add()
+ out_obj.name = "obj" + str(num_objects) + "_label_" + label
+
+ vertex1 = out_obj.image_properties.coordinates.vertexes.add()
+ vertex1.x = point1[0]
+ vertex1.y = point1[1]
+
+ vertex2 = out_obj.image_properties.coordinates.vertexes.add()
+ vertex2.x = point2[0]
+ vertex2.y = point2[1]
+
+ vertex3 = out_obj.image_properties.coordinates.vertexes.add()
+ vertex3.x = point3[0]
+ vertex3.y = point3[1]
+
+ vertex4 = out_obj.image_properties.coordinates.vertexes.add()
+ vertex4.x = point4[0]
+ vertex4.y = point4[1]
+
+ # Pack the confidence value.
+ confidence = wrappers_pb2.FloatValue(value=score)
+ out_obj.additional_properties.Pack(confidence)
+
+ if not args.no_debug:
+ polygon = np.array([point1, point2, point3, point4], np.int32)
+ polygon = polygon.reshape((-1, 1, 2))
+ cv2.polylines(image, [polygon], True, (0, 255, 0), 2)
+
+ caption = "{}: {:.3f}".format(label, score)
+ left_x = min(point1[0], min(point2[0], min(point3[0], point4[0])))
+ top_y = min(point1[1], min(point2[1], min(point3[1], point4[1])))
+ cv2.putText(image, caption, (int(left_x), int(top_y)), cv2.FONT_HERSHEY_SIMPLEX, 0.5,
+ (0, 255, 0), 2)
+
+ print('Found ' + str(num_objects) + ' object(s)')
+
+ if not args.no_debug:
+ debug_image_filename = 'network_compute_server_output.jpg'
+ cv2.imwrite(debug_image_filename, image)
+ print('Wrote debug image output to: "' + debug_image_filename + '"')
+
+ response_queue.put(out_proto)
+
+
+class NetworkComputeBridgeWorkerServicer(
+ network_compute_bridge_service_pb2_grpc.NetworkComputeBridgeWorkerServicer):
+
+ def __init__(self, thread_input_queue, thread_output_queue):
+ super(NetworkComputeBridgeWorkerServicer, self).__init__()
+
+ self.thread_input_queue = thread_input_queue
+ self.thread_output_queue = thread_output_queue
+
+ def NetworkCompute(self, request, context):
+ print('Got NetworkCompute request')
+ self.thread_input_queue.put(request)
+ out_proto = self.thread_output_queue.get()
+ return out_proto
+
+ def ListAvailableModels(self, request, context):
+ print('Got ListAvailableModels request')
+ self.thread_input_queue.put(request)
+ out_proto = self.thread_output_queue.get()
+ return out_proto
+
+
+def register_with_robot(options):
+ """ Registers this worker with the robot's Directory."""
+ ip = bosdyn.client.common.get_self_ip(options.hostname)
+ print('Detected IP address as: ' + ip)
+
+ sdk = bosdyn.client.create_standard_sdk("tensorflow_server")
+
+ robot = sdk.create_robot(options.hostname)
+
+ # Authenticate robot before being able to use it
+ if options.payload_credentials_file:
+ robot.authenticate_from_payload_credentials(
+ *bosdyn.client.util.get_guid_and_secret(options))
+ else:
+ bosdyn.client.util.authenticate(robot)
+
+ directory_client = robot.ensure_client(
+ bosdyn.client.directory.DirectoryClient.default_service_name)
+ directory_registration_client = robot.ensure_client(
+ bosdyn.client.directory_registration.DirectoryRegistrationClient.default_service_name)
+
+ # Check to see if a service is already registered with our name
+ services = directory_client.list()
+ for s in services:
+ if s.name == options.name:
+ print("WARNING: existing service with name, \"" + options.name + "\", removing it.")
+ directory_registration_client.unregister(options.name)
+ break
+
+ # Register service
+ print('Attempting to register ' + ip + ':' + options.port + ' onto ' + options.hostname + ' directory...')
+ directory_registration_client.register(options.name, "bosdyn.api.NetworkComputeBridgeWorker", kServiceAuthority, ip, int(options.port))
+
+
+
+def main(argv):
+ default_port = '50051'
+
+ parser = argparse.ArgumentParser()
+ parser.add_argument('-m', '--model', help='[MODEL_DIR] [LABELS_FILE.pbtxt]: Path to a model\'s directory and path to its labels .pbtxt file', action='append', nargs=2, required=True)
+ parser.add_argument('-p', '--port', help='Server\'s port number, default: ' + default_port,
+ default=default_port)
+ parser.add_argument('-d', '--no-debug', help='Disable writing debug images.', action='store_true')
+ parser.add_argument('-n', '--name', help='Service name', default='object-detection-coco')
+ bosdyn.client.util.add_payload_credentials_arguments(parser, required=False)
+ bosdyn.client.util.add_base_arguments(parser)
+
+ options = parser.parse_args(argv)
+
+ print(options.model)
+
+ for model in options.model:
+ if not os.path.isdir(model[0]):
+ print('Error: model directory (' + model[0] + ') not found or is not a directory.')
+ sys.exit(1)
+
+ # Perform registration.
+ register_with_robot(options)
+
+ # Thread-safe queues for communication between the GRPC endpoint and the ML thread.
+ request_queue = queue.Queue()
+ response_queue = queue.Queue()
+
+ # Start server thread
+ thread = threading.Thread(target=process_thread, args=([options, request_queue, response_queue]))
+ thread.start()
+
+ # Set up GRPC endpoint
+ server = grpc.server(futures.ThreadPoolExecutor(max_workers=10))
+ network_compute_bridge_service_pb2_grpc.add_NetworkComputeBridgeWorkerServicer_to_server(
+ NetworkComputeBridgeWorkerServicer(request_queue, response_queue), server)
+ server.add_insecure_port('[::]:' + options.port)
+ server.start()
+
+ print('Running...')
+ thread.join()
+
+ return True
+
+if __name__ == '__main__':
+ logging.basicConfig()
+ if not main(sys.argv[1:]):
+ sys.exit(1)
diff --git a/jsk_spot_robot/coreio_extension/Dockerfile b/jsk_spot_robot/coreio_extension/Dockerfile
new file mode 100644
index 0000000000..bb60defe90
--- /dev/null
+++ b/jsk_spot_robot/coreio_extension/Dockerfile
@@ -0,0 +1,42 @@
+# Use a base image provided by nvidia that already contains tensorflow 2.5
+## FROM nvcr.io/nvidia/l4t-tensorflow:r32.6.1-tf2.5-py3
+## https://docs.nvidia.com/deeplearning/frameworks/support-matrix/index.html#framework-matrix-2019
+FROM nvcr.io/nvidia/tensorflow:19.10-py3
+
+
+# Do some basic apt and pip updating
+RUN apt-get update && \
+ apt-get install -y --no-install-recommends python3-pip libgl1 &&\
+ apt-get clean
+
+# Copy over the python requirements file and our prebuilt models API library
+COPY docker-requirements.txt prebuilt/*.whl ./
+COPY models-with-protos models-with-protos
+
+
+# Install the python requirements
+RUN python3 -m pip install pip==21.3.1 setuptools==59.6.0 wheel==0.37.1 && \
+ python3 -m pip install -r docker-requirements.txt --find-links .
+
+# https://dev.bostondynamics.com/docs/python/fetch_tutorial/fetch2
+RUN python3 -m pip install opencv-python==4.5.*
+RUN python3 -m pip install --upgrade pip && \
+ python3 -m pip install tensorflow-gpu==2.3.1 tensorflow==2.3.1 tensorboard==2.3.0 tf-models-official==2.3.0 pycocotools lvis && \
+ python3 -m pip uninstall -y opencv-python-headless
+
+
+RUN python3 -m pip install models-with-protos/research
+
+# copy pre-trained model
+COPY ssd_resnet50_v1_fpn_640x640_coco17_tpu-8 /data/ssd_resnet50_v1_fpn_640x640_coco17_tpu-8
+RUN cp models-with-protos/research/object_detection/data/mscoco_label_map.pbtxt /data/ssd_resnet50_v1_fpn_640x640_coco17_tpu-8/
+
+# copy trained model
+COPY dogtoy-model /data/dogtoy-model
+
+# Copy over our main script
+COPY network_compute_server.py /app/
+WORKDIR /app
+
+# Set our script as the main entrypoint for the container
+ENTRYPOINT ["python3", "network_compute_server.py"]
diff --git a/jsk_spot_robot/coreio_extension/Makefile b/jsk_spot_robot/coreio_extension/Makefile
new file mode 100644
index 0000000000..ab1675d527
--- /dev/null
+++ b/jsk_spot_robot/coreio_extension/Makefile
@@ -0,0 +1,29 @@
+HOST_IP=192.168.50.3 # Or 10.0.0.3
+
+all:
+ [ -e models-with-protos.zip ] || wget https://dev.bostondynamics.com/docs/python/fetch_tutorial/files/models-with-protos.zip
+ [ -e models-with-protos ] || unzip models-with-protos.zip
+ [ -e ssd_resnet50_v1_fpn_640x640_coco17_tpu-8.tar.gz ] || wget http://download.tensorflow.org/models/object_detection/tf2/20200711/ssd_resnet50_v1_fpn_640x640_coco17_tpu-8.tar.gz
+ [ -e ssd_resnet50_v1_fpn_640x640_coco17_tpu-8 ] || tar -xvzf ssd_resnet50_v1_fpn_640x640_coco17_tpu-8.tar.gz
+ [ -e dogtoy-model ] || cp -r ../dogtoy/exported-models/dogtoy-model .
+ [ -e dogtoy-model/label_map.pbtxt ] || cp ../dogtoy/annotations/label_map.pbtxt dogtoy-model/
+ docker build -t object_detection_coco -f Dockerfile .
+
+run:
+ docker run --network host \
+ -v /opt/payload_credentials/payload_guid_and_secret:/opt/payload_credentials/payload_guid_and_secret \
+ --rm object_detection_coco \
+ -m /data/dogtoy-model/saved_model /data/dogtoy-model/label_map.pbtxt \
+ -m /data/ssd_resnet50_v1_fpn_640x640_coco17_tpu-8/saved_model \
+ /data/ssd_resnet50_v1_fpn_640x640_coco17_tpu-8/mscoco_label_map.pbtxt \
+ --payload-credentials-file /opt/payload_credentials/payload_guid_and_secret \
+ --name ssd-resnet-coco-server \
+ $(HOST_IP)
+
+export:
+ [ -e object_detection_coco.tar.gz ] || docker save object_detection_coco | pigz > object_detection_coco.tar.gz
+ # scp -P 20022 *.tgz to spot@10.0.0.3:/opt
+ # scp -P 20022 *.service spot@10.0.0.3:/lib/systemd/system/
+
+bash:
+ docker run --gpus all --rm -it --entrypoint /bin/bash object_detection_coco
diff --git a/jsk_spot_robot/coreio_extension/README.md b/jsk_spot_robot/coreio_extension/README.md
new file mode 100644
index 0000000000..aae571ffdc
--- /dev/null
+++ b/jsk_spot_robot/coreio_extension/README.md
@@ -0,0 +1,23 @@
+coreio extensions
+-----------------
+
+Please follow https://dev.bostondynamics.com/docs/python/fetch_tutorial/fetch1 to get images, annotate target, training network. After that, we expect following directory structure.
+
+```
+- dogtoy/
+ |- annotations/
+ |- label_map.pbtxt
+ |- exported-models/
+ |- dogtoy-model/
+ |- checkpoint/
+ |- pipeline.config
+ |- saved_model/
+ |- models/
+ |- pre-trained-models/
+```
+
+
+Then copy `dogtoy-model` directory within `dogtoy/exported-models/` to this directory and put `annotations/label_map.pbtxt` under `dogtoy-model`. See `Makefile` for detail.
+
+To build docker run `make all`. To export docker image, run `make export`. After that copy `object_detection_coco.tar.gz` to `/opt/` directory of SpotCORE. To copy the data, we recommend to connect the ethernet cable to the robot or dock and use `scp -P 20022 object_detection_coco.tar.gz spot@10.0.0.3:/tmp/` to copy data and then, login to to spotcore and run `sudo cp /tmp/object_detection_coco.tar.gz /opt`. Please keep backup before you overwrite `tar.gz` file.
+
diff --git a/jsk_spot_robot/coreio_extension/docker-compose.yml b/jsk_spot_robot/coreio_extension/docker-compose.yml
new file mode 100644
index 0000000000..3d194245f2
--- /dev/null
+++ b/jsk_spot_robot/coreio_extension/docker-compose.yml
@@ -0,0 +1,20 @@
+version: "3.5"
+services:
+ object_detection_coco:
+ image: object_detection_coco
+ network_mode: host
+ restart: unless-stopped
+ environment:
+ # This package couldn't be installed, but putting it on the path allows required access to the protos.
+ - PYTHONPATH=/models-with-protos/research/
+ volumes:
+ # Mount payload credentials.
+ - /opt/payload_credentials:/opt/payload_credentials
+ # and ML models
+ - /data/.extensions/object_detection_coco/data:/data
+ # The command below is partial because the docker image is already configured with an entrypoint.
+ command: >
+ -m /data/ssd_resnet50_v1_fpn_640x640_coco17_tpu-8/saved_model /data/ssd_resnet50_v1_fpn_640x640_coco17_tpu-8/mscoco_label_map.pbtxt
+ --payload-credentials-file /opt/payload_credentials/payload_guid_and_secret
+ 10.0.0.3
+# 192.168.50.3
diff --git a/jsk_spot_robot/coreio_extension/docker-requirements.txt b/jsk_spot_robot/coreio_extension/docker-requirements.txt
new file mode 100644
index 0000000000..12c96e14fe
--- /dev/null
+++ b/jsk_spot_robot/coreio_extension/docker-requirements.txt
@@ -0,0 +1,40 @@
+bosdyn-api==3.2.0
+ # via
+ # bosdyn-client
+ # bosdyn-core
+bosdyn-client==3.2.0
+ # via -r requirements.txt
+bosdyn-core==3.2.0
+ # via bosdyn-client
+certifi==2022.5.18.1
+ # via requests
+charset-normalizer==2.0.12
+ # via requests
+deprecated==1.2.13
+ # via
+ # bosdyn-client
+ # bosdyn-core
+grpcio
+ #==1.46.3 (conflicts with base image)
+ # via bosdyn-client
+idna==3.3
+ # via requests
+numpy==1.19.4
+ # via bosdyn-client
+protobuf==3.19.4
+ # via bosdyn-api
+pyjwt==2.4.0
+ # via bosdyn-client
+requests==2.27.1
+ # via bosdyn-client
+six
+ #==1.16.0 (conflicts with base image)
+ # via grpcio
+urllib3==1.26.9
+ # via requests
+wrapt
+ #==1.14.1 (conflicts with base image)
+ # via deprecated
+Pillow==8.4.0
+opencv-python==4.6.0.66
+ # via network_compute_server.py
\ No newline at end of file
diff --git a/jsk_spot_robot/coreio_extension/ncb_object_detection_coco.service b/jsk_spot_robot/coreio_extension/ncb_object_detection_coco.service
new file mode 100644
index 0000000000..40f869e6d8
--- /dev/null
+++ b/jsk_spot_robot/coreio_extension/ncb_object_detection_coco.service
@@ -0,0 +1,18 @@
+[Unit]
+Description=Coco object detection container
+After=docker.service
+Wants=network-online.target docker.socket
+Requires=docker.socket
+
+[Service]
+Restart=always
+User=root
+ExecStartPre=/bin/bash -c "/usr/bin/docker container inspect object_detection_coco 2> /dev/null || /usr/bin/docker load < /opt/object_detection_coco.tar.gz;"
+ExecStartPre=-/usr/bin/docker stop object_detection_coco
+ExecStartPre=-/usr/bin/docker rm object_detection_coco
+ExecStart=/usr/bin/docker run --name object_detection_coco --network host --rm -v /opt/payload_credentials/payload_guid_and_secret:/opt/payload_credentials/payload_guid_and_secret object_detection_coco -m /data/dogtoy-model/saved_model /data/dogtoy-model/label_map.pbtxt -m /data/ssd_resnet50_v1_fpn_640x640_coco17_tpu-8/saved_model /data/ssd_resnet50_v1_fpn_640x640_coco17_tpu-8/mscoco_label_map.pbtxt --payload-credentials-file /opt/payload_credentials/payload_guid_and_secret --name ssd-resnet-coco-server --port 50055 192.168.50.3
+ExecStop=/usr/bin/docker stop -t 10 object_detection_coco
+TimeoutSec=900
+
+[Install]
+WantedBy=multi-user.target
diff --git a/jsk_spot_robot/coreio_extension/network_compute_server.py b/jsk_spot_robot/coreio_extension/network_compute_server.py
new file mode 100644
index 0000000000..9b697b8383
--- /dev/null
+++ b/jsk_spot_robot/coreio_extension/network_compute_server.py
@@ -0,0 +1,312 @@
+# Copyright (c) 2022 Boston Dynamics, Inc. All rights reserved.
+#
+# Downloading, reproducing, distributing or otherwise using the SDK Software
+# is subject to the terms and conditions of the Boston Dynamics Software
+# Development Kit License (20191101-BDSDK-SL).
+
+import argparse
+import io
+import os
+import sys
+import time
+import logging
+
+import cv2
+from PIL import Image
+import numpy as np
+
+from bosdyn.api import network_compute_bridge_service_pb2_grpc
+from bosdyn.api import network_compute_bridge_pb2
+from bosdyn.api import image_pb2
+from bosdyn.api import header_pb2
+import bosdyn.client
+import bosdyn.client.util
+import grpc
+from concurrent import futures
+import tensorflow as tf
+
+import queue
+import threading
+from google.protobuf import wrappers_pb2
+from object_detection.utils import label_map_util
+
+kServiceAuthority = "fetch-tutorial-worker.spot.robot"
+
+
+class TensorFlowObjectDetectionModel:
+ def __init__(self, model_path, label_path):
+ self.detect_fn = tf.saved_model.load(model_path)
+ self.category_index = label_map_util.create_category_index_from_labelmap(label_path, use_display_name=True)
+ self.name = os.path.basename(os.path.dirname(model_path))
+
+ def predict(self, image):
+ input_tensor = tf.convert_to_tensor(image)
+ input_tensor = input_tensor[tf.newaxis, ...]
+ detections = self.detect_fn(input_tensor)
+
+ return detections
+
+def process_thread(args, request_queue, response_queue):
+ # Load the model(s)
+ models = {}
+ for model in args.model:
+ this_model = TensorFlowObjectDetectionModel(model[0], model[1])
+ models[this_model.name] = this_model
+
+ print('')
+ print('Service ' + args.name + ' running on port: ' + str(args.port))
+
+ print('Loaded models:')
+ for model_name in models:
+ print(' ' + model_name)
+
+ while True:
+ request = request_queue.get()
+
+ if isinstance(request, network_compute_bridge_pb2.ListAvailableModelsRequest):
+ out_proto = network_compute_bridge_pb2.ListAvailableModelsResponse()
+ for model_name in models:
+ out_proto.available_models.append(model_name)
+ if models[model_name].category_index is not None:
+ labels_msg = out_proto.labels.add()
+ labels_msg.model_name = model_name
+ for n in models[model_name].category_index.keys():
+ labels_msg.available_labels.append(models[model_name].category_index[n]['name'])
+ response_queue.put(out_proto)
+ continue
+ else:
+ out_proto = network_compute_bridge_pb2.NetworkComputeResponse()
+
+ # Find the model
+ if request.input_data.model_name not in models:
+ err_str = 'Cannot find model "' + request.input_data.model_name + '" in loaded models.'
+ print(err_str)
+
+ # Set the error in the header.
+ out_proto.header.error.code = header_pb2.CommonError.CODE_INVALID_REQUEST
+ out_proto.header.error.message = err_str
+ response_queue.put(out_proto)
+ continue
+
+ model = models[request.input_data.model_name]
+
+ # Unpack the incoming image.
+ if request.input_data.image.format == image_pb2.Image.FORMAT_RAW:
+ pil_image = Image.open(io.BytesIO(request.input_data.image.data))
+ if request.input_data.image.pixel_format == image_pb2.Image.PIXEL_FORMAT_GREYSCALE_U8:
+ # If the input image is grayscale, convert it to RGB.
+ image = cv2.cvtColor(pil_image, cv2.COLOR_GRAY2RGB)
+
+ elif request.input_data.image.pixel_format == image_pb2.Image.PIXEL_FORMAT_RGB_U8:
+ # Already an RGB image.
+ image = pil_image
+
+ else:
+ print('Error: image input in unsupported pixel format: ', request.input_data.image.pixel_format)
+ response_queue.put(out_proto)
+ continue
+
+ elif request.input_data.image.format == image_pb2.Image.FORMAT_JPEG:
+ dtype = np.uint8
+ jpg = np.frombuffer(request.input_data.image.data, dtype=dtype)
+ image = cv2.imdecode(jpg, -1)
+
+ if len(image.shape) < 3:
+ # If the input image is grayscale, convert it to RGB.
+ image = cv2.cvtColor(image, cv2.COLOR_GRAY2RGB)
+
+ image_width = image.shape[0]
+ image_height = image.shape[1]
+
+ detections = model.predict(image)
+
+ num_objects = 0
+
+ # All outputs are batches of tensors.
+ # Convert to numpy arrays, and take index [0] to remove the batch dimension.
+ # We're only interested in the first num_detections.
+ num_detections = int(detections.pop('num_detections'))
+ detections = {key: value[0, :num_detections].numpy()
+ for key, value in detections.items()}
+
+ boxes = detections['detection_boxes']
+ classes = detections['detection_classes']
+ scores = detections['detection_scores']
+
+
+ for i in range(boxes.shape[0]):
+ if scores[i] < request.input_data.min_confidence:
+ continue
+
+ box = tuple(boxes[i].tolist())
+
+ # Boxes come in with normalized coordinates. Convert to pixel values.
+ box = [box[0] * image_width, box[1] * image_height, box[2] * image_width, box[3] * image_height]
+
+ score = scores[i]
+
+ if classes[i] in model.category_index.keys():
+ label = model.category_index[classes[i]]['name']
+ else:
+ label = 'N/A'
+
+ num_objects += 1
+
+ print('Found object with label: "' + label + '" and score: ' + str(score))
+
+
+ point1 = np.array([box[1], box[0]])
+ point2 = np.array([box[3], box[0]])
+ point3 = np.array([box[3], box[2]])
+ point4 = np.array([box[1], box[2]])
+
+ # Add data to the output proto.
+ out_obj = out_proto.object_in_image.add()
+ out_obj.name = "obj" + str(num_objects) + "_label_" + label
+
+ vertex1 = out_obj.image_properties.coordinates.vertexes.add()
+ vertex1.x = point1[0]
+ vertex1.y = point1[1]
+
+ vertex2 = out_obj.image_properties.coordinates.vertexes.add()
+ vertex2.x = point2[0]
+ vertex2.y = point2[1]
+
+ vertex3 = out_obj.image_properties.coordinates.vertexes.add()
+ vertex3.x = point3[0]
+ vertex3.y = point3[1]
+
+ vertex4 = out_obj.image_properties.coordinates.vertexes.add()
+ vertex4.x = point4[0]
+ vertex4.y = point4[1]
+
+ # Pack the confidence value.
+ confidence = wrappers_pb2.FloatValue(value=score)
+ out_obj.additional_properties.Pack(confidence)
+
+ if not args.no_debug:
+ polygon = np.array([point1, point2, point3, point4], np.int32)
+ polygon = polygon.reshape((-1, 1, 2))
+ cv2.polylines(image, [polygon], True, (0, 255, 0), 2)
+
+ caption = "{}: {:.3f}".format(label, score)
+ left_x = min(point1[0], min(point2[0], min(point3[0], point4[0])))
+ top_y = min(point1[1], min(point2[1], min(point3[1], point4[1])))
+ cv2.putText(image, caption, (int(left_x), int(top_y)), cv2.FONT_HERSHEY_SIMPLEX, 0.5,
+ (0, 255, 0), 2)
+
+ print('Found ' + str(num_objects) + ' object(s)')
+
+ if not args.no_debug:
+ debug_image_filename = 'network_compute_server_output.jpg'
+ cv2.imwrite(debug_image_filename, image)
+ print('Wrote debug image output to: "' + debug_image_filename + '"')
+
+ response_queue.put(out_proto)
+
+
+class NetworkComputeBridgeWorkerServicer(
+ network_compute_bridge_service_pb2_grpc.NetworkComputeBridgeWorkerServicer):
+
+ def __init__(self, thread_input_queue, thread_output_queue):
+ super(NetworkComputeBridgeWorkerServicer, self).__init__()
+
+ self.thread_input_queue = thread_input_queue
+ self.thread_output_queue = thread_output_queue
+
+ def NetworkCompute(self, request, context):
+ print('Got NetworkCompute request')
+ self.thread_input_queue.put(request)
+ out_proto = self.thread_output_queue.get()
+ return out_proto
+
+ def ListAvailableModels(self, request, context):
+ print('Got ListAvailableModels request')
+ self.thread_input_queue.put(request)
+ out_proto = self.thread_output_queue.get()
+ return out_proto
+
+
+def register_with_robot(options):
+ """ Registers this worker with the robot's Directory."""
+ ip = bosdyn.client.common.get_self_ip(options.hostname)
+ print('Detected IP address as: ' + ip)
+
+ sdk = bosdyn.client.create_standard_sdk("tensorflow_server")
+
+ robot = sdk.create_robot(options.hostname)
+
+ # Authenticate robot before being able to use it
+ if options.payload_credentials_file:
+ robot.authenticate_from_payload_credentials(
+ *bosdyn.client.util.get_guid_and_secret(options))
+ else:
+ bosdyn.client.util.authenticate(robot)
+
+ directory_client = robot.ensure_client(
+ bosdyn.client.directory.DirectoryClient.default_service_name)
+ directory_registration_client = robot.ensure_client(
+ bosdyn.client.directory_registration.DirectoryRegistrationClient.default_service_name)
+
+ # Check to see if a service is already registered with our name
+ services = directory_client.list()
+ for s in services:
+ if s.name == options.name:
+ print("WARNING: existing service with name, \"" + options.name + "\", removing it.")
+ directory_registration_client.unregister(options.name)
+ break
+
+ # Register service
+ print('Attempting to register ' + ip + ':' + options.port + ' onto ' + options.hostname + ' directory...')
+ directory_registration_client.register(options.name, "bosdyn.api.NetworkComputeBridgeWorker", kServiceAuthority, ip, int(options.port))
+
+
+
+def main(argv):
+ default_port = '50051'
+
+ parser = argparse.ArgumentParser()
+ parser.add_argument('-m', '--model', help='[MODEL_DIR] [LABELS_FILE.pbtxt]: Path to a model\'s directory and path to its labels .pbtxt file', action='append', nargs=2, required=True)
+ parser.add_argument('-p', '--port', help='Server\'s port number, default: ' + default_port,
+ default=default_port)
+ parser.add_argument('-d', '--no-debug', help='Disable writing debug images.', action='store_true')
+ parser.add_argument('-n', '--name', help='Service name', default='fetch-server')
+ bosdyn.client.util.add_payload_credentials_arguments(parser, required=False)
+ bosdyn.client.util.add_base_arguments(parser)
+
+ options = parser.parse_args(argv)
+
+ print(options.model)
+
+ for model in options.model:
+ if not os.path.isdir(model[0]):
+ print('Error: model directory (' + model[0] + ') not found or is not a directory.')
+ sys.exit(1)
+
+ # Perform registration.
+ register_with_robot(options)
+
+ # Thread-safe queues for communication between the GRPC endpoint and the ML thread.
+ request_queue = queue.Queue()
+ response_queue = queue.Queue()
+
+ # Start server thread
+ thread = threading.Thread(target=process_thread, args=([options, request_queue, response_queue]))
+ thread.start()
+
+ # Set up GRPC endpoint
+ server = grpc.server(futures.ThreadPoolExecutor(max_workers=10))
+ network_compute_bridge_service_pb2_grpc.add_NetworkComputeBridgeWorkerServicer_to_server(
+ NetworkComputeBridgeWorkerServicer(request_queue, response_queue), server)
+ server.add_insecure_port('[::]:' + options.port)
+ server.start()
+
+ print('Running...')
+ thread.join()
+
+ return True
+
+if __name__ == '__main__':
+ logging.basicConfig()
+ if not main(sys.argv[1:]):
+ sys.exit(1)
diff --git a/jsk_spot_robot/jsk_spot_behavior_manager/CMakeLists.txt b/jsk_spot_robot/jsk_spot_behavior_manager/CMakeLists.txt
new file mode 100644
index 0000000000..46b773ac6b
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_behavior_manager/CMakeLists.txt
@@ -0,0 +1,9 @@
+cmake_minimum_required(VERSION 2.8.3)
+project(jsk_spot_behavior_manager)
+
+find_package(catkin REQUIRED)
+
+catkin_python_setup()
+
+catkin_package(
+)
diff --git a/jsk_spot_robot/jsk_spot_behavior_manager/README.md b/jsk_spot_robot/jsk_spot_behavior_manager/README.md
new file mode 100644
index 0000000000..96d7c3e0fd
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_behavior_manager/README.md
@@ -0,0 +1,93 @@
+# jsk_spot_behaviors
+
+These packages enable for Spot to execute locomotoion behaviors to reach a desired position.
+
+## Concept
+
+In this framework, knowledge about positions and transtion behaviors between them are represented as a digraph like below.
+
+Each node represents specified positions and each edge represents a behavior to transition between them.
+
+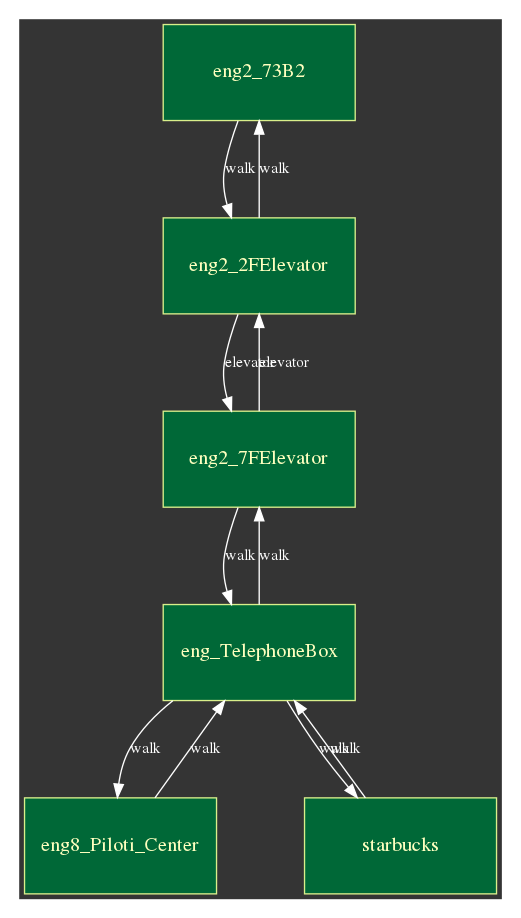
+
+A graph is defined by a yaml file ( e.g. [node.yaml in spot_behavior_graph](./spot_behavior_graph/config/node.yaml) and [edge.yaml in spot_behavior_graph](./spot_behavior_graph/config/edge.yaml) )
+Please see nodes and edges format section below.
+
+Knowledge representation and execution process of behaviors are separated from actual behavior implementation.
+The implementation of former is in spot_behavior_manager and spot_behavior_manager_server, but actual behaviors like walk and elevator are in spot_basic_behaviors.
+behavior_manager_server node will dynamically load each behaviors defined in map.yaml so you can easilly add your behavior without editing these core implementation.
+Please see spot_basic_behaviors package for behavior examples.
+
+## How to use it
+
+To run demo, please make Spot stand in front of the fiducial in 73B2 and run
+
+```bash
+roslaunch spot_behavior_graph demo.launch
+```
+
+```bash
+$ rostopic pub -1 /spot_behavior_manager_server/lead_person/execute_behaviors spot_behavior_manager_msgs/LeadPersonActionGoal "header:
+ seq: 0
+ stamp:
+ secs: 0
+ nsecs: 0
+ frame_id: ''
+goal_id:
+ stamp:
+ secs: 0
+ nsecs: 0
+ id: ''
+goal:
+ target_node_id: 'eng2_2FElevator'"
+```
+
+Then Spot will go to 2FElevator of eng2 by walk behavior and elevator behavior implemented in spot_basic_behaviors packages.
+
+https://user-images.githubusercontent.com/9410362/124338016-aad25380-dbe0-11eb-962f-b9a27e1e08cb.mp4
+
+For more details, please see [spot_behavior_manager](./spot_behavior_manager), [spot_behavior_manager_server](./spot_behavior_manager_server) and each behavior documentation. (e.g. [spot_basic_behaviors](./spot_basic_behaviors) )
+
+## Behavior Graph
+
+
+This package provides graph and node data for spot_behavior_manager.
+
+### scripts
+
+#### visualize_map.py
+
+Visualizer script of map file of spot_behavior_manager
+
+Befor using this script, you need to install
+
+```
+pip3 install graphviz xdot
+```
+
+##### Usage
+
+```
+rosrun spot_behavior_graph visualize_map.py --filename
+```
+
+##### Example Output
+
+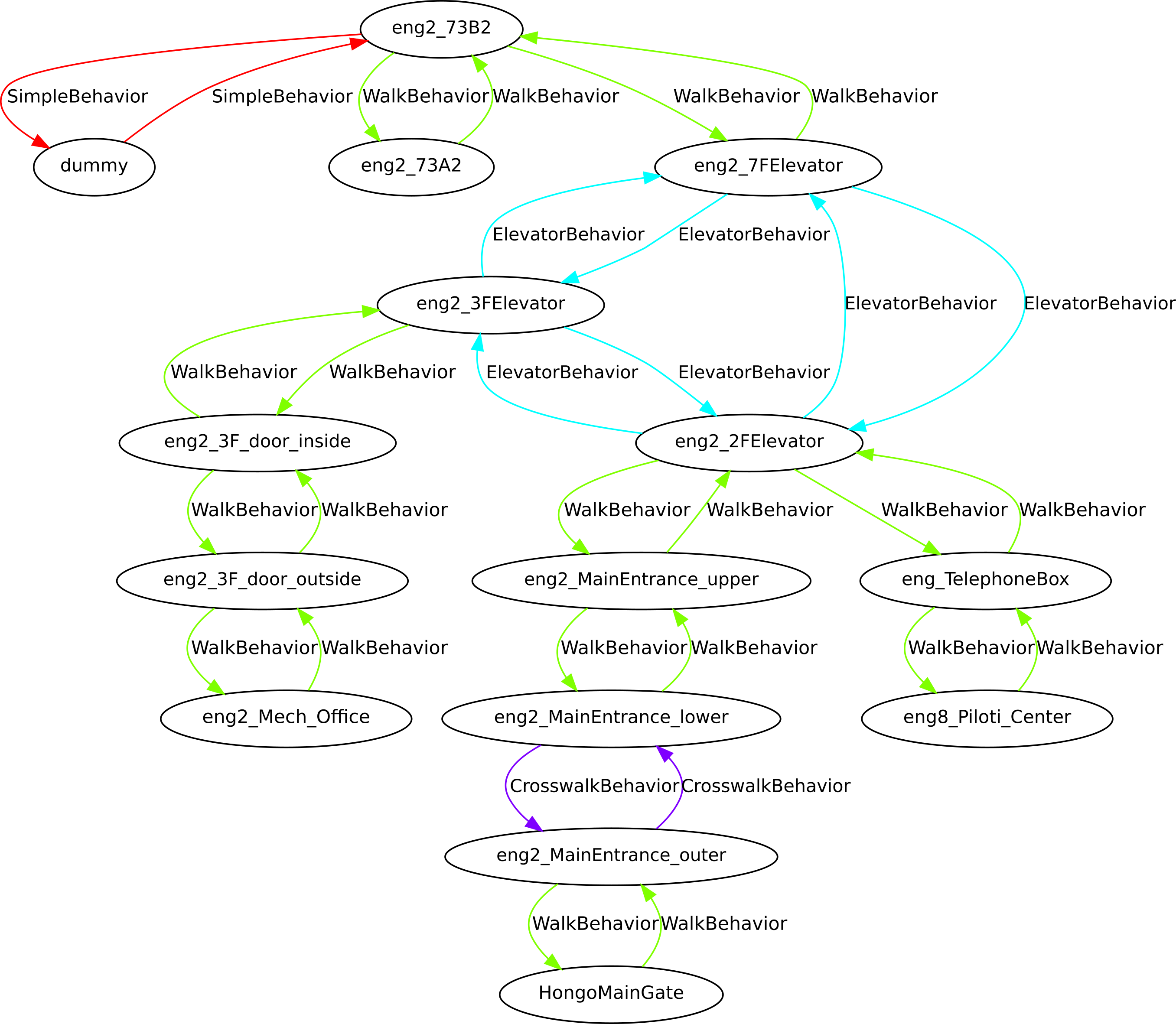
+
+## behavior manager server
+
+This package provides ros nodes for spot_behavior_manager.
+
+### ROS Node
+
+#### behavior_manager_server.py
+
+ROS Node script for spot_behavior_manager.
+
+See [the source of behavior_manager_node](../spot_behavior_manager/src/spot_behavior_manager/behavior_manager_node.py).
+
+#### interactive_behavior_executor.py
+
+ROS Node script to execute action of spot_behavior_manager by language.
+
diff --git a/jsk_spot_robot/jsk_spot_behavior_manager/behavior_graph/edges.yaml b/jsk_spot_robot/jsk_spot_behavior_manager/behavior_graph/edges.yaml
new file mode 100644
index 0000000000..13455ad03f
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_behavior_manager/behavior_graph/edges.yaml
@@ -0,0 +1,389 @@
+edges:
+ - from: 'eng2_JSKEntrance'
+ to: 'eng2_73A2'
+ behavior_type: 'spot_basic_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_73B2_to_7FElevator.walk'
+ - from: 'eng2_73A2'
+ to: 'eng2_JSKEntrance'
+ behavior_type: 'spot_basic_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_73B2_to_7FElevator.walk'
+ - from: 'eng2_JSKEntrance'
+ to: 'eng2_73B1'
+ behavior_type: 'spot_basic_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_73B2_to_7FElevator.walk'
+ - from: 'eng2_73B1'
+ to: 'eng2_JSKEntrance'
+ behavior_type: 'spot_basic_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_73B2_to_7FElevator.walk'
+ - from: 'eng2_JSKEntrance'
+ to: 'eng2_73B2'
+ behavior_type: 'spot_basic_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_73B2_to_7FElevator.walk'
+ - from: 'eng2_73B2'
+ to: 'eng2_JSKEntrance'
+ behavior_type: 'spot_basic_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_73B2_to_7FElevator.walk'
+ - from: 'eng2_JSKEntrance'
+ to: 'eng2_73A4'
+ behavior_type: 'spot_basic_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_73B2_to_7FElevator.walk'
+ - from: 'eng2_73A4'
+ to: 'eng2_JSKEntrance'
+ behavior_type: 'spot_basic_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_73B2_to_7FElevator.walk'
+ - from: 'eng2_73B2'
+ to: 'eng2_73B2_belka_home'
+ behavior_type: 'spot_basic_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_73B2_to_7FElevator.walk'
+ - from: 'eng2_73B2_belka_home'
+ to: 'eng2_73B2'
+ behavior_type: 'spot_basic_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_73B2_to_7FElevator.walk'
+ - from: 'eng2_73B2'
+ to: 'eng2_73B2_strelka_home'
+ behavior_type: 'spot_basic_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_73B2_to_7FElevator.walk'
+ - from: 'eng2_73B2_strelka_home'
+ to: 'eng2_73B2'
+ behavior_type: 'spot_basic_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_73B2_to_7FElevator.walk'
+ - from: 'eng2_73B2'
+ to: 'eng2_73B2_shinjo_desk'
+ behavior_type: 'spot_basic_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/73b2_inside.walk'
+ - from: 'eng2_73B2_shinjo_desk'
+ to: 'eng2_73B2'
+ behavior_type: 'spot_basic_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/73b2_inside.walk'
+ - from: 'eng2_73B2'
+ to: 'eng2_81C1'
+ behavior_type: 'spot_basic_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_73B2_to_81C1.walk'
+ - from: 'eng2_81C1'
+ to: 'eng2_73B2'
+ behavior_type: 'spot_basic_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_73B2_to_81C1.walk'
+ - from: 'eng2_73B2'
+ to: 'eng2_83A2'
+ behavior_type: 'spot_basic_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_73B2_to_83A2.walk'
+ - from: 'eng2_83A2'
+ to: 'eng2_73B2'
+ behavior_type: 'spot_basic_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_73B2_to_83A2.walk'
+ - from: 'eng2_JSKEntrance'
+ to: 'eng2_7FElevator'
+ behavior_type: 'spot_basic_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_73B2_to_7FElevator.walk'
+ - from: 'eng2_7FElevator'
+ to: 'eng2_JSKEntrance'
+ behavior_type: 'spot_basic_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_73B2_to_7FElevator.walk'
+ - from: 'eng2_7FElevator'
+ to: 'eng2_2FElevator'
+ behavior_type: 'spot_basic_behaviors.elevator_behavior.ElevatorBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_elevator_7FElevator_to_2FElevator.walk'
+ rest_waypoint_id: 'unsaid-collie-jvatvS.7KX9jpzQz61GL4A=='
+ goal_waypoint_id: 'shelfy-dassie-vK9Tf3cAQpdA.25gPJl8OQ=='
+ - from: 'eng2_2FElevator'
+ to: 'eng2_7FElevator'
+ behavior_type: 'spot_basic_behaviors.elevator_behavior.ElevatorBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_elevator_7FElevator_to_2FElevator.walk'
+ rest_waypoint_id: 'unsaid-collie-jvatvS.7KX9jpzQz61GL4A=='
+ goal_waypoint_id: 'sly-chetah-IZ4pVY7vrqO36OoKCYk9Zg=='
+ - from: 'eng2_2FElevator'
+ to: 'eng_TelephoneBox'
+ behavior_type: 'spot_basic_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_2FElevator_to_eng8_2FElevator.walk'
+ - from: 'eng_TelephoneBox'
+ to: 'eng2_2FElevator'
+ behavior_type: 'spot_basic_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_2FElevator_to_eng8_2FElevator.walk'
+ - from: 'eng_TelephoneBox'
+ to: 'eng8_Piloti_Center'
+ behavior_type: 'spot_basic_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_2FElevator_to_eng8_2FElevator.walk'
+ - from: 'eng8_Piloti_Center'
+ to: 'eng_TelephoneBox'
+ behavior_type: 'spot_basic_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_2FElevator_to_eng8_2FElevator.walk'
+ - from: 'eng2_3FElevator'
+ to: 'eng2_2FElevator'
+ behavior_type: 'spot_basic_behaviors.elevator_behavior.ElevatorBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_elevator_3FElevator_to_2FElevator.walk'
+ rest_waypoint_id: 'akimbo-scarab-RoO1pzYYARw+EquQk1IIbg=='
+ goal_waypoint_id: 'dashed-virus-QgetwIkinypWecGNMSS4Yw=='
+ - from: 'eng2_2FElevator'
+ to: 'eng2_3FElevator'
+ behavior_type: 'spot_basic_behaviors.elevator_behavior.ElevatorBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_elevator_3FElevator_to_2FElevator.walk'
+ rest_waypoint_id: 'akimbo-scarab-RoO1pzYYARw+EquQk1IIbg=='
+ goal_waypoint_id: 'eighth-ant-0Ot3VoMm0uiJNBHnbJOF9w=='
+ - from: 'eng2_3FElevator'
+ to: 'eng2_3F_door_inside'
+ behavior_type: 'spot_basic_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_3FElevator_to_Mech_Office.walk'
+ - from: 'eng2_3F_door_inside'
+ to: 'eng2_3FElevator'
+ behavior_type: 'spot_basic_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_3FElevator_to_Mech_Office.walk'
+ - from: 'eng2_3F_door_inside'
+ to: 'eng2_3F_door_outside'
+ behavior_type: 'spot_basic_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_3FElevator_to_Mech_Office.walk'
+ - from: 'eng2_3F_door_outside'
+ to: 'eng2_3F_door_inside'
+ behavior_type: 'spot_basic_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_3FElevator_to_Mech_Office.walk'
+ - from: 'eng2_3F_door_outside'
+ to: 'eng2_Mech_Office'
+ behavior_type: 'spot_basic_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_3FElevator_to_Mech_Office.walk'
+ - from: 'eng2_Mech_Office'
+ to: 'eng2_3F_door_outside'
+ behavior_type: 'spot_basic_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_3FElevator_to_Mech_Office.walk'
+ - from: 'eng2_Mech_Office'
+ to: 'eng2_Mailbox'
+ behavior_type: 'spot_basic_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_MechOffice_inside.walk'
+ - from: 'eng2_Mailbox'
+ to: 'eng2_Mech_Office'
+ behavior_type: 'spot_basic_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_MechOffice_inside.walk'
+ - from: 'eng2_Mech_Office'
+ to: 'eng2_CampusMail'
+ behavior_type: 'spot_basic_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_MechOffice_inside.walk'
+ - from: 'eng2_CampusMail'
+ to: 'eng2_Mech_Office'
+ behavior_type: 'spot_basic_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_MechOffice_inside.walk'
+ - from: 'eng2_Mailbox'
+ to: 'eng2_CampusMail'
+ behavior_type: 'spot_basic_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_MechOffice_inside.walk'
+ - from: 'eng2_CampusMail'
+ to: 'eng2_Mailbox'
+ behavior_type: 'spot_basic_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_MechOffice_inside.walk'
+ - from: 'eng2_3FElevator'
+ to: 'eng2_7FElevator'
+ behavior_type: 'spot_basic_behaviors.elevator_behavior.ElevatorBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_elevator_3FElevator_to_2FElevator.walk'
+ rest_waypoint_id: 'akimbo-scarab-RoO1pzYYARw+EquQk1IIbg=='
+ goal_waypoint_id: 'dashed-virus-QgetwIkinypWecGNMSS4Yw=='
+ - from: 'eng2_7FElevator'
+ to: 'eng2_3FElevator'
+ behavior_type: 'spot_basic_behaviors.elevator_behavior.ElevatorBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_elevator_7FElevator_to_2FElevator.walk'
+ rest_waypoint_id: 'unsaid-collie-jvatvS.7KX9jpzQz61GL4A=='
+ goal_waypoint_id: 'shelfy-dassie-vK9Tf3cAQpdA.25gPJl8OQ=='
+ - from: 'eng2_2FElevator'
+ to: 'eng2_subway_pillar'
+ behavior_type: 'spot_basic_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_2FElevator_to_subway.walk'
+ - from: 'eng2_subway_pillar'
+ to: 'eng2_2FElevator'
+ behavior_type: 'spot_basic_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_2FElevator_to_subway.walk'
+ - from: 'eng2_subway_pillar'
+ to: 'eng2_subway_initial'
+ behavior_type: 'spot_basic_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_subway_tablenavigation.walk'
+ - from: 'eng2_subway_initial'
+ to: 'eng2_subway_pillar'
+ behavior_type: 'spot_basic_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_subway_tablenavigation.walk'
+ - from: 'eng2_subway_initial'
+ to: 'eng2_subway_table_00'
+ behavior_type: 'spot_basic_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_subway_tablenavigation.walk'
+ - from: 'eng2_subway_table_00'
+ to: 'eng2_subway_initial'
+ behavior_type: 'spot_basic_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_subway_tablenavigation.walk'
+ - from: 'eng2_2FElevator'
+ to: 'eng2_MainEntrance_upper'
+ behavior_type: 'spot_basic_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_2FElevator_to_MainEntrance.walk'
+ - from: 'eng2_MainEntrance_upper'
+ to: 'eng2_2FElevator'
+ behavior_type: 'spot_basic_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_2FElevator_to_MainEntrance.walk'
+ - from: 'eng2_MainEntrance_upper'
+ to: 'eng2_MainEntrance_lower'
+ behavior_type: 'spot_basic_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_MainEntrance_to_HongoMainGate_Daylight.walk'
+ - from: 'eng2_MainEntrance_lower'
+ to: 'eng2_MainEntrance_upper'
+ behavior_type: 'spot_basic_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_MainEntrance_to_HongoMainGate_Daylight.walk'
+ - from: 'eng2_MainEntrance_lower'
+ to: 'eng2_MainEntrance_outer'
+ behavior_type: 'spot_basic_behaviors.crosswalk_behavior.CrosswalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_MainEntrance_to_HongoMainGate_Daylight.walk'
+ - from: 'eng2_MainEntrance_outer'
+ to: 'eng2_MainEntrance_lower'
+ behavior_type: 'spot_basic_behaviors.crosswalk_behavior.CrosswalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_MainEntrance_to_HongoMainGate_Daylight.walk'
+ - from: 'eng2_MainEntrance_outer'
+ to: 'HongoMainGate'
+ behavior_type: 'spot_basic_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_MainEntrance_to_HongoMainGate_Daylight.walk'
+ - from: 'HongoMainGate'
+ to: 'eng2_MainEntrance_outer'
+ behavior_type: 'spot_basic_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_MainEntrance_to_HongoMainGate_Daylight.walk'
+ - from: 'eng2_7FElevator'
+ to: 'eng2_1FElevator'
+ behavior_type: 'spot_basic_behaviors.elevator_behavior.ElevatorBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_elevator_7FElevator_to_1FElevator.walk'
+ rest_waypoint_id: 'snubbed-puma-5v8XtjdA17XhPNLhsH2WEg=='
+ goal_waypoint_id: 'meager-fox-bT4DU3uCHBJFWuYILkopVg=='
+ - from: 'eng2_1FElevator'
+ to: 'eng2_7FElevator'
+ behavior_type: 'spot_basic_behaviors.elevator_behavior.ElevatorBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_elevator_7FElevator_to_1FElevator.walk'
+ rest_waypoint_id: 'snubbed-puma-5v8XtjdA17XhPNLhsH2WEg=='
+ goal_waypoint_id: 'meager-fox-bT4DU3uCHBJFWuYILkopVg=='
+ - from: 'eng2_1FElevator'
+ to: 'eng2_GarbageCollectionArea_east'
+ behavior_type: 'spot_basic_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_1FElevator_to_1FGarbageCollectionAreaEast.walk'
+ - from: 'eng2_1FElevator'
+ to: 'eng2_GarbageCollectionArea_south'
+ behavior_type: 'spot_basic_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_1FElevator_to_1FGarbageCollectionAreaSouth.walk'
+ - from: 'eng2_GarbageCollectionArea_east'
+ to: 'eng2_1FElevator'
+ behavior_type: 'spot_basic_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_1FElevator_to_1FGarbageCollectionAreaEast.walk'
+ - from: 'eng2_GarbageCollectionArea_south'
+ to: 'eng2_1FElevator'
+ behavior_type: 'spot_basic_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_1FElevator_to_1FGarbageCollectionAreaSouth.walk'
diff --git a/jsk_spot_robot/jsk_spot_behavior_manager/behavior_graph/edges_person_lead.yaml b/jsk_spot_robot/jsk_spot_behavior_manager/behavior_graph/edges_person_lead.yaml
new file mode 100644
index 0000000000..64632e982f
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_behavior_manager/behavior_graph/edges_person_lead.yaml
@@ -0,0 +1,295 @@
+edges:
+ - from: 'eng2_73B2'
+ to: 'eng2_7FElevator'
+ behavior_type: 'spot_person_lead_behaviors.narrow_behavior.NarrowBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_73B2_to_7FElevator.walk'
+ - from: 'eng2_7FElevator'
+ to: 'eng2_73B2'
+ behavior_type: 'spot_person_lead_behaviors.narrow_behavior.NarrowBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_73B2_to_7FElevator.walk'
+ - from: 'eng2_7FElevator'
+ to: 'eng2_2FElevator'
+ behavior_type: 'spot_person_lead_behaviors.elevator_behavior.ElevatorBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_elevator_7FElevator_to_2FElevator.walk'
+ rest_waypoint_id: 'unsaid-collie-jvatvS.7KX9jpzQz61GL4A=='
+ goal_waypoint_id: 'shelfy-dassie-vK9Tf3cAQpdA.25gPJl8OQ=='
+ - from: 'eng2_2FElevator'
+ to: 'eng2_7FElevator'
+ behavior_type: 'spot_person_lead_behaviors.elevator_behavior.ElevatorBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_elevator_7FElevator_to_2FElevator.walk'
+ rest_waypoint_id: 'unsaid-collie-jvatvS.7KX9jpzQz61GL4A=='
+ goal_waypoint_id: 'sly-chetah-IZ4pVY7vrqO36OoKCYk9Zg=='
+ - from: 'eng2_2FElevator'
+ to: 'eng2_MainEntrance_upper'
+ behavior_type: 'spot_person_lead_behaviors.narrow_behavior.NarrowBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_2FElevator_to_MainEntrance.walk'
+ - from: 'eng2_MainEntrance_upper'
+ to: 'eng2_2FElevator'
+ behavior_type: 'spot_person_lead_behaviors.narrow_behavior.NarrowBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_2FElevator_to_MainEntrance.walk'
+ - from: 'eng2_MainEntrance_upper'
+ to: 'eng2_MainEntrance_lower'
+ behavior_type: 'spot_person_lead_behaviors.stair_behavior.StairBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_MainEntrance_to_HongoMainGate_Daylight.walk'
+ stair_nums:
+ - -4
+ - -8
+ - from: 'eng2_MainEntrance_lower'
+ to: 'eng2_MainEntrance_upper'
+ behavior_type: 'spot_person_lead_behaviors.stair_behavior.StairBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_MainEntrance_to_HongoMainGate_Daylight.walk'
+ stair_nums:
+ - 8
+ - 4
+ - from: 'eng2_MainEntrance_lower'
+ to: 'eng2_MainEntrance_outer'
+ behavior_type: 'spot_person_lead_behaviors.crosswalk_behavior.CrosswalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_MainEntrance_to_HongoMainGate_Daylight.walk'
+ - from: 'eng2_MainEntrance_outer'
+ to: 'eng2_MainEntrance_lower'
+ behavior_type: 'spot_person_lead_behaviors.crosswalk_behavior.CrosswalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_MainEntrance_to_HongoMainGate_Daylight.walk'
+ - from: 'eng2_MainEntrance_outer'
+ to: 'HongoMainGate'
+ behavior_type: 'spot_person_lead_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_MainEntrance_to_HongoMainGate_Daylight.walk'
+ - from: 'HongoMainGate'
+ to: 'eng2_MainEntrance_outer'
+ behavior_type: 'spot_person_lead_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_MainEntrance_to_HongoMainGate_Daylight.walk'
+ - from: 'eng2_3FElevator'
+ to: 'eng2_2FElevator'
+ behavior_type: 'spot_person_lead_behaviors.elevator_behavior.ElevatorBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_elevator_3FElevator_to_2FElevator.walk'
+ rest_waypoint_id: 'akimbo-scarab-RoO1pzYYARw+EquQk1IIbg=='
+ goal_waypoint_id: 'dashed-virus-QgetwIkinypWecGNMSS4Yw=='
+ - from: 'eng2_2FElevator'
+ to: 'eng2_3FElevator'
+ behavior_type: 'spot_person_lead_behaviors.elevator_behavior.ElevatorBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_elevator_3FElevator_to_2FElevator.walk'
+ rest_waypoint_id: 'akimbo-scarab-RoO1pzYYARw+EquQk1IIbg=='
+ goal_waypoint_id: 'eighth-ant-0Ot3VoMm0uiJNBHnbJOF9w=='
+ - from: 'eng2_3FElevator'
+ to: 'eng2_3F_door_inside'
+ behavior_type: 'spot_person_lead_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_3FElevator_to_Mech_Office.walk'
+ - from: 'eng2_3F_door_inside'
+ to: 'eng2_3FElevator'
+ behavior_type: 'spot_person_lead_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_3FElevator_to_Mech_Office.walk'
+ - from: 'eng2_3F_door_inside'
+ to: 'eng2_3F_door_outside'
+ behavior_type: 'spot_person_lead_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_3FElevator_to_Mech_Office.walk'
+ - from: 'eng2_3F_door_outside'
+ to: 'eng2_3F_door_inside'
+ behavior_type: 'spot_person_lead_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_3FElevator_to_Mech_Office.walk'
+ - from: 'eng2_3F_door_outside'
+ to: 'eng2_Mech_Office'
+ behavior_type: 'spot_person_lead_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_3FElevator_to_Mech_Office.walk'
+ - from: 'eng2_Mech_Office'
+ to: 'eng2_3F_door_outside'
+ behavior_type: 'spot_person_lead_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_3FElevator_to_Mech_Office.walk'
+ - from: 'eng2_3FElevator'
+ to: 'eng2_7FElevator'
+ behavior_type: 'spot_person_lead_behaviors.elevator_behavior.ElevatorBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_elevator_3FElevator_to_2FElevator.walk'
+ rest_waypoint_id: 'akimbo-scarab-RoO1pzYYARw+EquQk1IIbg=='
+ goal_waypoint_id: 'dashed-virus-QgetwIkinypWecGNMSS4Yw=='
+ - from: 'eng2_7FElevator'
+ to: 'eng2_3FElevator'
+ behavior_type: 'spot_person_lead_behaviors.elevator_behavior.ElevatorBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_elevator_7FElevator_to_2FElevator.walk'
+ rest_waypoint_id: 'unsaid-collie-jvatvS.7KX9jpzQz61GL4A=='
+ goal_waypoint_id: 'shelfy-dassie-vK9Tf3cAQpdA.25gPJl8OQ=='
+ - from: 'eng2_2FElevator'
+ to: 'eng2_subway_pillar'
+ behavior_type: 'spot_person_lead_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_2FElevator_to_subway.walk'
+ - from: 'eng2_subway_pillar'
+ to: 'eng2_2FElevator'
+ behavior_type: 'spot_person_lead_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_2FElevator_to_subway.walk'
+ - from: 'eng2_subway_pillar'
+ to: 'eng2_subway_initial'
+ behavior_type: 'spot_person_lead_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_subway_tablenavigation.walk'
+ - from: 'eng2_subway_initial'
+ to: 'eng2_subway_pillar'
+ behavior_type: 'spot_person_lead_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_subway_tablenavigation.walk'
+ - from: 'eng2_subway_initial'
+ to: 'eng2_subway_table_00'
+ behavior_type: 'spot_person_lead_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_subway_tablenavigation.walk'
+ - from: 'eng2_subway_table_00'
+ to: 'eng2_subway_initial'
+ behavior_type: 'spot_person_lead_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_subway_tablenavigation.walk'
+ - from: 'eng2_subway_initial'
+ to: 'eng2_subway_table_01'
+ behavior_type: 'spot_person_lead_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_subway_tablenavigation.walk'
+ - from: 'eng2_subway_table_01'
+ to: 'eng2_subway_initial'
+ behavior_type: 'spot_person_lead_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_subway_tablenavigation.walk'
+ - from: 'eng2_subway_initial'
+ to: 'eng2_subway_table_02'
+ behavior_type: 'spot_person_lead_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_subway_tablenavigation_02.walk'
+ - from: 'eng2_subway_table_02'
+ to: 'eng2_subway_initial'
+ behavior_type: 'spot_person_lead_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_subway_tablenavigation_02.walk'
+ - from: 'eng2_subway_initial'
+ to: 'eng2_subway_table_03'
+ behavior_type: 'spot_person_lead_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_subway_tablenavigation_02.walk'
+ - from: 'eng2_subway_table_03'
+ to: 'eng2_subway_initial'
+ behavior_type: 'spot_person_lead_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_subway_tablenavigation_02.walk'
+ - from: 'eng2_subway_initial'
+ to: 'eng2_subway_table_04'
+ behavior_type: 'spot_person_lead_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_subway_tablenavigation_02.walk'
+ - from: 'eng2_subway_table_04'
+ to: 'eng2_subway_initial'
+ behavior_type: 'spot_person_lead_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_subway_tablenavigation_02.walk'
+ - from: 'eng2_subway_initial'
+ to: 'eng2_subway_table_10'
+ behavior_type: 'spot_person_lead_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_subway_tablenavigation.walk'
+ - from: 'eng2_subway_table_10'
+ to: 'eng2_subway_initial'
+ behavior_type: 'spot_person_lead_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_subway_tablenavigation.walk'
+ - from: 'eng2_subway_initial'
+ to: 'eng2_subway_table_11'
+ behavior_type: 'spot_person_lead_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_subway_tablenavigation.walk'
+ - from: 'eng2_subway_table_11'
+ to: 'eng2_subway_initial'
+ behavior_type: 'spot_person_lead_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_subway_tablenavigation.walk'
+ - from: 'eng2_subway_initial'
+ to: 'eng2_subway_table_12'
+ behavior_type: 'spot_person_lead_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_subway_tablenavigation_02.walk'
+ - from: 'eng2_subway_table_12'
+ to: 'eng2_subway_initial'
+ behavior_type: 'spot_person_lead_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_subway_tablenavigation_02.walk'
+ - from: 'eng2_subway_initial'
+ to: 'eng2_subway_table_13'
+ behavior_type: 'spot_person_lead_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_subway_tablenavigation_02.walk'
+ - from: 'eng2_subway_table_13'
+ to: 'eng2_subway_initial'
+ behavior_type: 'spot_person_lead_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_subway_tablenavigation_02.walk'
+ - from: 'eng2_subway_initial'
+ to: 'eng2_subway_table_14'
+ behavior_type: 'spot_person_lead_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_subway_tablenavigation_02.walk'
+ - from: 'eng2_subway_table_14'
+ to: 'eng2_subway_initial'
+ behavior_type: 'spot_person_lead_behaviors.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_subway_tablenavigation_02.walk'
diff --git a/jsk_spot_robot/jsk_spot_behavior_manager/behavior_graph/nodes.yaml b/jsk_spot_robot/jsk_spot_behavior_manager/behavior_graph/nodes.yaml
new file mode 100644
index 0000000000..49006a7fde
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_behavior_manager/behavior_graph/nodes.yaml
@@ -0,0 +1,421 @@
+nodes:
+ 'dummy':
+ name_en: 'dummy'
+ name_jp: 'ダミー'
+ 'eng2_JSKEntrance':
+ name_en: '73B1'
+ name_jp:
+ - 'JSK'
+ waypoints_on_graph:
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_73B2_to_7FElevator.walk'
+ id: 'hated-salmon-+oAmVbVKzwfer6BexXKNog=='
+ localization_method: 'waypoint'
+ 'eng2_73B1':
+ name_en: '73B1'
+ name_jp:
+ - '73 B 1'
+ - '73B1'
+ waypoints_on_graph:
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_73B2_to_7FElevator.walk'
+ id: 'unkept-scarab-pfr5U1CBRCXx9EOt6eQDCw=='
+ localization_method: 'waypoint'
+ 'eng2_73B2':
+ name_en: '73B2'
+ name_jp:
+ - '73 B 2'
+ - '73B2'
+ waypoints_on_graph:
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_73B2_to_7FElevator.walk'
+ id: 'arty-hyrax-hiViwXJwUrkJ2LR5UAuKyw=='
+ localization_method: 'fiducial'
+ - graph: '$(find spot_autowalk_data)/autowalk/73b2_inside.walk'
+ id: 'goodly-hogg-cEjt+0aMeZdksVRXrP7.uw=='
+ localization_method: 'fiducial'
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_73B2_to_81C1.walk'
+ id: 'fuzzed-medusa-wyXWCEjmWas1kMo8EJW8Bw=='
+ localization_method: 'fiducial'
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_73B2_to_83A2.walk'
+ id: 'dyed-viper-HVQRLVeklEUaE2aXJW+d6Q=='
+ localization_method: 'fiducial'
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_7FElevator_to_73B2_trash.walk'
+ id: 'tined-mouse-D.2ws5hStb8AE.C.J5lKEw=='
+ localization_method: 'fiducial'
+ 'eng2_73B2_belka_home':
+ name_en: 'belka'
+ name_jp:
+ - 'ベルカ'
+ waypoints_on_graph:
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_73B2_to_7FElevator.walk'
+ id: 'uppity-cayman-rm8aTrilycp7soPeorOdUw=='
+ localization_method: 'waypoint'
+ 'eng2_73B2_strelka_home':
+ name_en: 'strelka'
+ name_jp:
+ - 'ストレルカ'
+ waypoints_on_graph:
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_73B2_to_7FElevator.walk'
+ id: 'proof-llama-9slE0zml9BYcNFbpQkmNcg=='
+ localization_method: 'waypoint'
+ 'eng2_73B2_shinjo_desk':
+ name_en: 'shinjo'
+ name_jp:
+ - '新城'
+ - '新城の席'
+ waypoints_on_graph:
+ - graph: '$(find spot_autowalk_data)/autowalk/73b2_inside.walk'
+ id: 'cogent-vole-wTZdgPPyjZIObFh2dr7EqA=='
+ localization_method: 'waypoint'
+ 'eng2_73A2':
+ name_en: '73A2'
+ name_jp:
+ - '73 A 2'
+ - '73A2'
+ waypoints_on_graph:
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_73B2_to_7FElevator.walk'
+ id: 'enough-python-pqYBEhDZHuCEapcDxLK32w=='
+ localization_method: 'waypoint'
+ 'eng2_73A4':
+ name_en: '73A4'
+ name_jp:
+ - '73 A 4'
+ - '73A4'
+ waypoints_on_graph:
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_73B2_to_7FElevator.walk'
+ id: 'dashed-kodiak-bKNHSR3S7fXE11UeXeeekA=='
+ localization_method: 'waypoint'
+ 'eng2_81C1':
+ name_en: '81C1'
+ name_jp:
+ - '81 C 1'
+ - '81C1'
+ - 'プロジェクト部屋'
+ - 'プロジェクト 部屋'
+ waypoints_on_graph:
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_73B2_to_81C1.walk'
+ id: 'sable-narwal-o7qEo7543BUTj4sNKWcQ6g=='
+ localization_method: 'waypoint'
+ 'eng2_83A2':
+ name_en: '83A2'
+ name_jp:
+ - '83 A 2'
+ - '83A2'
+ - '工作室'
+ waypoints_on_graph:
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_73B2_to_83A2.walk'
+ id: 'shaved-koala-aLy+bUIQpAHBQbi5DxeKJA=='
+ localization_method: 'waypoint'
+ 'eng2_7FElevator':
+ name_en: 'Elevator'
+ name_jp:
+ - '7階エレベーター'
+ - '7階 エレベーター'
+ waypoints_on_graph:
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_73B2_to_7FElevator.walk'
+ id: 'looted-cougar-RWT2C0zLJXG.ezYnCuLUeQ=='
+ localization_method: 'fiducial'
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_7FElevator_to_2FElevator.walk'
+ id: 'larger-mudcat-0x3bt3Dif.1QU9JfXpyQPw=='
+ localization_method: 'fiducial'
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_elevator_7FElevator_to_2FElevator.walk'
+ id: 'sly-chetah-IZ4pVY7vrqO36OoKCYk9Zg=='
+ localization_method: 'fiducial'
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_elevator_7FElevator_to_1FElevator.walk'
+ id: 'meager-fox-bT4DU3uCHBJFWuYILkopVg=='
+ localization_method: 'fiducial'
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_elevator_7FElevator_to_73B2_trash.walk'
+ id: 'spruce-frog-bNtHHEv469wvlNxlIxBV5w=='
+ localization_method: 'fiducial'
+ switchbot_device: '/eng2/7f/elevator_bot_down'
+ floor: 7
+ floor_height: 24
+ 'eng2_2FElevator':
+ name_en: 'Elevator'
+ name_jp:
+ - '2階 エレベーター'
+ - '2階エレベーター'
+ waypoints_on_graph:
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_7FElevator_to_2FElevator.walk'
+ id: 'rainy-collie-uwFW2KVYg2YCUi8FF6N00g=='
+ localization_method: 'fiducial'
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_2FElevator_to_2FEntrance.walk'
+ id: 'snaky-beagle-.fmRm2JflzlV6Dv5fTdnIQ=='
+ localization_method: 'fiducial'
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_2FElevator_to_MainGate.walk'
+ id: 'banner-oxen-UrEwTUbZYL0IQnY5TCFwrA=='
+ localization_method: 'fiducial'
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_elevator_7FElevator_to_2FElevator.walk'
+ id: 'shelfy-dassie-vK9Tf3cAQpdA.25gPJl8OQ=='
+ localization_method: 'fiducial'
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_2FElevator_to_eng8_2FElevator.walk'
+ id: 'inland-remora-FqtX8ScP+.inEd4xFYKq4A=='
+ localization_method: 'fiducial'
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_elevator_3FElevator_to_2FElevator.walk'
+ id: 'dashed-virus-QgetwIkinypWecGNMSS4Yw=='
+ localization_method: 'fiducial'
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_2FElevator_to_MainEntrance.walk'
+ id: 'mythic-leech-Uslc00eTIhygFsCdH2q1Qg=='
+ localization_method: 'fiducial'
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_2FElevator_to_subway.walk'
+ id: 'brumal-gerbil-NLVgQc0oBXbc8BCZev57LQ=='
+ localization_method: 'fiducial'
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_2fentrance_to_1fentrance.walk'
+ id: 'felted-weasel-kFVXZpw1.DvEm6FCSgC5XQ=='
+ localization_method: 'fiducial'
+ switchbot_device: '/eng2/2f/elevator_bot_up'
+ floor: 2
+ floor_height: 0
+ 'eng2_3FElevator':
+ name_en: 'Elevator'
+ name_jp:
+ - '3階 エレベーター'
+ - '3階エレベーター'
+ waypoints_on_graph:
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_elevator_3FElevator_to_2FElevator.walk'
+ id: 'eighth-ant-0Ot3VoMm0uiJNBHnbJOF9w=='
+ localization_method: 'fiducial'
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_3FElevator_to_Mech_Office.walk'
+ id: 'doughy-vulture-kMie2F0bAno9STnKFjNadA=='
+ localization_method: 'fiducial'
+ switchbot_device: '/eng2/3f/elevator_bot_up'
+ floor: 3
+ floor_height: 4.5
+ 'eng2_1FElevator':
+ name_en: 'Elevator'
+ name_jp:
+ - '1階 エレベーター'
+ - '1階エレベーター'
+ waypoints_on_graph:
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_elevator_7FElevator_to_1FElevator.walk'
+ id: 'brag-eagle-Of.kPg1gvRBhSWzrP+G3Yw=='
+ localization_method: 'fiducial'
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_1FElevator_to_1FGarbageCollectionAreaEast.walk'
+ id: 'sunlit-iguana-cXGwqooA99O95Hzqas19dw=='
+ localization_method: 'fiducial'
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_1FElevator_to_1FGarbageCollectionAreaSouth.walk'
+ id: 'gilled-bee-ve3JJ8B2sMTnRL3s8p.SZA=='
+ localization_method: 'fiducial'
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_1FElevator_to_1FGarbageCollectionAreaSouth_via213.walk'
+ id: 'oafish-vervet-w.bCe7FjEILCP8oBQg6Miw=='
+ localization_method: 'fiducial'
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_1fentrance_to_1FElevator.walk'
+ id: 'anemic-spider-TimPFBe0OMBdd+kWxYBW2Q=='
+ localization_method: 'fiducial'
+ switchbot_device: '/eng2/1f/elevator_bot_up'
+ floor: 1
+ floor_height: -4.5
+ 'eng2_Mech_Office':
+ name_en: 'Mech Office'
+ name_jp:
+ - '機械系 事務室'
+ - '機械系事務室'
+ - '事務室'
+ waypoints_on_graph:
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_3FElevator_to_Mech_Office.walk'
+ id: 'foiled-ibis-dAio3Ld6rCSWQgy9ERDulw=='
+ localization_method: 'fiducial'
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_MechOffice_inside.walk'
+ id: 'askant-beef-JQLXogu60cJgJiSXcyjKUQ=='
+ localization_method: 'fiducial'
+ 'eng2_Mailbox':
+ name_en: 'Mailbox'
+ name_jp:
+ - '郵便入れ'
+ waypoints_on_graph:
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_MechOffice_inside.walk'
+ id: 'sacked-tomcat-wpzX0UCSooUeKol.CShTqQ=='
+ localization_method: 'waypoint'
+ 'eng2_CampusMail':
+ name_en: 'CampusMail'
+ name_jp:
+ - '学内便'
+ waypoints_on_graph:
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_MechOffice_inside.walk'
+ id: 'jovial-civet-OPcK4EyGMTkxjZg04nuO.Q=='
+ localization_method: 'waypoint'
+ 'eng2_3F_door_inside':
+ waypoints_on_graph:
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_3FElevator_to_Mech_Office.walk'
+ id: 'silty-llama-gdnA1Y.5ugUuDuZ9RL9upQ=='
+ localization_method: 'waypoint'
+ 'eng2_3F_door_outside':
+ waypoints_on_graph:
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_3FElevator_to_Mech_Office.walk'
+ id: 'plane-marlin-gaEqSGH8WX35X1619X0NwQ=='
+ localization_method: 'waypoint'
+ 'eng_TelephoneBox':
+ name_en: 'telephone box'
+ name_jp: '電話ボックス'
+ waypoints_on_graph:
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_2FElevator_to_eng8_2FElevator.walk'
+ id: 'slain-pika-VdtPz3lWcp5T+pEArUB3PA=='
+ localization_method: 'fiducial'
+ - graph: '$(find spot_autowalk_data)/autowalk/eng_TelephoneBox_to_HongoMainGate.walk'
+ id: 'aired-hyrax-BF+hXHaUufi.DLd3pEWm5Q=='
+ localization_method: 'fiducial'
+ 'eng8_Piloti_Center':
+ name_en: 'Piloti'
+ name_jp: '8号館 ピロティ'
+ waypoints_on_graph:
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_2FElevator_to_eng8_2FElevator.walk'
+ id: 'azoic-lion-Iapbto7rzlzuFF0MvXdyPA=='
+ localization_method: 'fiducial'
+ 'eng2_subway_pillar':
+ name_en: 'Piloti'
+ name_jp: 'サブウェイ'
+ waypoints_on_graph:
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_2FElevator_to_subway.walk'
+ id: 'quack-snail-Zm7LgLSyql.xcoqi9OeCQA=='
+ localization_method: 'fiducial'
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_subway_tablenavigation.walk'
+ id: 'risen-bowfin-2he29MpsZLJRToJDhZ3.3g=='
+ localization_method: 'fiducial'
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_subway_tablenavigation_02.walk'
+ id: 'unread-donkey-2pdTiY6qfMnAfHD8RNH2ZA=='
+ localization_method: 'fiducial'
+ 'eng2_subway_initial':
+ waypoints_on_graph:
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_subway_tablenavigation.walk'
+ id: 'skimpy-vole-2plogvKFUrjXTCoxsCsNGA=='
+ localization_method: 'waypoint'
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_subway_tablenavigation_02.walk'
+ id: 'fired-minnow-Pw+F4RFHFQwQolGeuHgkEQ=='
+ localization_method: 'waypoint'
+ 'eng2_subway_table_00':
+ waypoints_on_graph:
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_subway_tablenavigation.walk'
+ id: 'perky-crake-iZWT3e+cQtLKUCo8iVTu7Q=='
+ localization_method: 'waypoint'
+ 'eng2_subway_table_01':
+ waypoints_on_graph:
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_subway_tablenavigation.walk'
+ id: 'spacy-eland-WlC6wgdJeo5u.TY6T3hA8Q=='
+ localization_method: 'waypoint'
+ 'eng2_subway_table_02':
+ waypoints_on_graph:
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_subway_tablenavigation.walk'
+ id: 'apodal-drum-o2pzrnIBJdLVWMX.ElaQOQ=='
+ localization_method: 'waypoint'
+ 'eng2_subway_table_03':
+ waypoints_on_graph:
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_subway_tablenavigation.walk'
+ id: 'formed-gerbil-yZerC+XIahSrvCJK5Duk6A=='
+ localization_method: 'waypoint'
+ 'eng2_subway_table_04':
+ waypoints_on_graph:
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_subway_tablenavigation.walk'
+ id: 'ruled-otter-2zSijP2KPICZpqU80utSPw=='
+ localization_method: 'waypoint'
+ 'eng2_subway_table_10':
+ waypoints_on_graph:
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_subway_tablenavigation.walk'
+ id: 'spiral-falcon-bG1t8To8x.p7BWwOWjH2Lg=='
+ localization_method: 'waypoint'
+ 'eng2_subway_table_11':
+ waypoints_on_graph:
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_subway_tablenavigation.walk'
+ id: 'manky-mite-EvhV0ln+iiG+pTCfeEnArQ=='
+ localization_method: 'waypoint'
+ 'eng2_subway_table_12':
+ waypoints_on_graph:
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_subway_tablenavigation.walk'
+ id: 'brash-sheep-NYE7iE0HuaqR0i5xnzYE1A=='
+ localization_method: 'waypoint'
+ 'eng2_subway_table_13':
+ waypoints_on_graph:
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_subway_tablenavigation.walk'
+ id: 'swampy-jay-jEYEQ+FOe4eMKEhoGco9LA=='
+ localization_method: 'waypoint'
+ 'eng2_subway_table_14':
+ waypoints_on_graph:
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_subway_tablenavigation.walk'
+ id: 'terse-crest-Toj82ugJt2Y029d7Afhq0A=='
+ localization_method: 'waypoint'
+ 'eng2_MainEntrance_upper':
+ waypoints_on_graph:
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_2FElevator_to_MainEntrance.walk'
+ id: 'violet-ibis-HtCPm39SIDSzoJFVX88S+A=='
+ localization_method: 'fiducial'
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_MainEntrance_to_HongoMainGate.walk'
+ id: 'about-goat-EHRLqkk7XWmMXAdfcXHP5g=='
+ localization_method: 'fiducial'
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_MainEntrance_to_HongoMainGate_Daylight.walk'
+ id: 'ahead-mink-Fml31k5vw.Y2XR.7v1BSeg=='
+ localization_method: 'fiducial'
+ 'eng2_MainEntrance_lower':
+ name_en: 'Entrance'
+ name_jp:
+ - '2号館 正面入口'
+ - '2号館正面入口'
+ waypoints_on_graph:
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_MainEntrance_to_HongoMainGate.walk'
+ id: 'aft-tick-clWAq8obxtWm64bTthYwMQ=='
+ localization_method: 'waypoint'
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_MainEntrance_to_HongoMainGate_Daylight.walk'
+ id: 'rested-grouse-GzVp6htKyt6kdIcS+Tu6aA=='
+ localization_method: 'waypoint'
+ 'eng2_MainEntrance_outer':
+ waypoints_on_graph:
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_MainEntrance_to_HongoMainGate.walk'
+ id: 'tilled-weevil-slAZLtX3U2NcqaINkGY0Sw=='
+ localization_method: 'waypoint'
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_MainEntrance_to_HongoMainGate_Daylight.walk'
+ id: 'sown-pincer-NcgfKhWf9H+B3yWIKA8W7A=='
+ localization_method: 'waypoint'
+ 'eng2_1FEntrance_outer':
+ name_en: '1F Entrance'
+ name_jp:
+ - '2号館1階入口'
+ - '2号館 1階入口'
+ waypoints_on_graph:
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_1fentrance_to_1FElevator.walk'
+ id: 'madcap-racoon-WmDiG93hDjlU6eDOUX2Jbg=='
+ localization_method: 'fiducial'
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_2fentrance_to_1fentrance.walk'
+ id: 'jammed-deer-L6mHZb2lmu+iQwGexsoAvw=='
+ localization_method: 'fiducial'
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_outside.walk'
+ id: 'bully-walrus-xsZTCuUHJ0dvzFGGmEZJxQ=='
+ localization_method: 'fiducial'
+ 'eng2_corner_northwest':
+ waypoints_on_graph:
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_outside.walk'
+ id: 'setose-angus-zflUwvXh2LTV96LNrrAHFg=='
+ localization_method: 'fiducial'
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_2fentrance_to_1fentrance.walk'
+ id: 'honey-agouti-3CfK3qU9XiErSV9gttqSKA=='
+ localization_method: 'fiducial'
+ 'eng2_GarbageCollectionArea_east':
+ name_en: 'Garbage collection area'
+ name_jp: 'ゴミ捨て場'
+ waypoints_on_graph:
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_1FElevator_to_1FGarbageCollectionAreaEast.walk'
+ id: 'podgy-oxen-t+KIiX.QiVaFGcphBsrekA=='
+ localization_method: 'waypoint'
+ 'eng2_GarbageCollectionArea_south':
+ name_en: 'Garbage collection area'
+ name_jp: 'ゴミ捨て場'
+ waypoints_on_graph:
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_1FElevator_to_1FGarbageCollectionAreaSouth.walk'
+ id: 'atonic-frog-uCPybjcZAN3fQZHNx71GRw=='
+ localization_method: 'waypoint'
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_1FElevator_to_1FGarbageCollectionAreaSouth_via213.walk'
+ id: 'boxy-hound-2E2IbEf63lXIM91zP.P2Ww=='
+ localization_method: 'waypoint'
+ 'eng2_7F_trashcan':
+ waypoints_on_graph:
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_7FElevator_to_73B2_trash.walk'
+ id: 'faddy-cuckoo-ZSHi6wGNKFCQhYetW6iLew=='
+ localization_method: 'waypoint'
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_7f_around.walk'
+ id: ''
+ localization_method: 'waypoint'
+ 'HongoMainGate':
+ name_en: 'Maingate'
+ name_jp: '正門'
+ waypoints_on_graph:
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_MainEntrance_to_HongoMainGate.walk'
+ id: 'aglow-gadfly-tSusAUqUNtqVaKFO49pDbQ=='
+ localization_method: 'waypoint'
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_MainEntrance_to_HongoMainGate_Daylight.walk'
+ id: 'regal-bison-qmAA7fyZh10L2bzoTNqUFQ=='
+ localization_method: 'waypoint'
diff --git a/jsk_spot_robot/jsk_spot_behavior_manager/behavior_graph/simple_behavior_graph.yaml b/jsk_spot_robot/jsk_spot_behavior_manager/behavior_graph/simple_behavior_graph.yaml
new file mode 100644
index 0000000000..cba2b070a0
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_behavior_manager/behavior_graph/simple_behavior_graph.yaml
@@ -0,0 +1,28 @@
+edges:
+ - from: 'nodeA'
+ to: 'nodeB'
+ behavior_type: 'jsk_spot_behavior_manager.base_behavior.SimpleBehavior'
+ cost: 10
+ args: {}
+ - from: 'nodeB'
+ to: 'nodeC'
+ behavior_type: 'jsk_spot_behavior_manager.base_behavior.SimpleBehavior'
+ cost: 10
+ args: {}
+ - from: 'nodeC'
+ to: 'nodeB'
+ behavior_type: 'jsk_spot_behavior_manager.base_behavior.SimpleBehavior'
+ cost: 10
+ args: {}
+ - from: 'nodeB'
+ to: 'nodeA'
+ behavior_type: 'jsk_spot_behavior_manager.base_behavior.SimpleBehavior'
+ cost: 10
+ args: {}
+nodes:
+ 'nodeA':
+ name_en: 'nodeA'
+ 'nodeB':
+ name_en: 'nodeB'
+ 'nodeC':
+ name_en: 'nodeC'
diff --git a/jsk_spot_robot/jsk_spot_behavior_manager/launch/demo.launch b/jsk_spot_robot/jsk_spot_behavior_manager/launch/demo.launch
new file mode 100644
index 0000000000..8986335870
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_behavior_manager/launch/demo.launch
@@ -0,0 +1,23 @@
+
+
+
+
+
+
+
+
+
+ initial_node_id: '$(arg initial_node_id)'
+ silent_mode: true
+
+
+
diff --git a/jsk_spot_robot/jsk_spot_behavior_manager/launch/simple_demo.launch b/jsk_spot_robot/jsk_spot_behavior_manager/launch/simple_demo.launch
new file mode 100644
index 0000000000..4cc59161ec
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_behavior_manager/launch/simple_demo.launch
@@ -0,0 +1,22 @@
+
+
+
+
+
+
+
+ initial_node_id: 'nodeA'
+ silent_mode: true
+ dry_mode: true
+
+
+
diff --git a/jsk_spot_robot/jsk_spot_behavior_manager/node_scripts/behavior_manager_server.py b/jsk_spot_robot/jsk_spot_behavior_manager/node_scripts/behavior_manager_server.py
new file mode 100755
index 0000000000..af70e08639
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_behavior_manager/node_scripts/behavior_manager_server.py
@@ -0,0 +1,14 @@
+#!/usr/bin/env python3
+# -*- coding: utf-8 -*-
+
+import rospy
+from jsk_spot_behavior_manager.behavior_manager_node import BehaviorManagerNode
+
+def main():
+
+ rospy.init_node('behavior_manager_node')
+ node = BehaviorManagerNode()
+ node.run()
+
+if __name__ == '__main__':
+ main()
diff --git a/jsk_spot_robot/jsk_spot_behavior_manager/node_scripts/interactive_behavior_executor.py b/jsk_spot_robot/jsk_spot_behavior_manager/node_scripts/interactive_behavior_executor.py
new file mode 100755
index 0000000000..85333b6ba6
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_behavior_manager/node_scripts/interactive_behavior_executor.py
@@ -0,0 +1,66 @@
+#!/usr/bin/env python
+# -*- encoding: utf-8 -*-
+
+import actionlib
+import rospy
+
+from jsk_spot_behavior_msgs.msg import NavigationAction, NavigationGoal
+
+from sound_play.libsoundplay import SoundClient
+from ros_speech_recognition import SpeechRecognitionClient
+
+
+def main():
+
+ rospy.init_node('interactive_behavior_executor')
+
+ speech_recognition_client = SpeechRecognitionClient()
+ sound_client = SoundClient(sound_action='/robotsound_jp', sound_topic='/robotsound_jp')
+ action_server_lead_to = actionlib.SimpleActionClient('~execute_behaviors', NavigationAction)
+
+ node_list = rospy.get_param('~nodes', {})
+
+ while not rospy.is_shutdown():
+
+ rospy.loginfo('Asking package information')
+ while not rospy.is_shutdown():
+ sound_client.say('行き先を教えてください。', blocking=True)
+ recogntion_result = speech_recognition_client.recognize()
+ if len(recogntion_result.transcript) == 0:
+ rospy.logerr('No matching node found from spoken \'{}\''.format(recogntion_result))
+ sound_client.say('行き先がわかりませんでした', blocking=True)
+ continue
+ recognized_destination = recogntion_result.transcript[0]
+ target_node_candidates = {}
+ for node_id, value in node_list.items():
+ try:
+ if not value.has_key('name_jp'):
+ continue
+ if type(value['name_jp']) is list:
+ # DO HOGE
+ for name in value['name_jp']:
+ if name.encode('utf-8') == recognized_destination:
+ target_node_candidates[node_id] = value
+ else:
+ if value['name_jp'].encode('utf-8') == recognized_destination:
+ target_node_candidates[node_id] = value
+ except Exception as e:
+ rospy.logerr('Error: {}'.format(e))
+ if len(target_node_candidates) == 0:
+ rospy.logerr('No matching node found from spoken \'{}\''.format(recogntion_result))
+ sound_client.say('行き先がわかりませんでした', blocking=True)
+ else:
+ rospy.loginfo('target_node_candidates: {}'.format(target_node_candidates))
+ break
+
+ target_node_id = target_node_candidates.keys()[0]
+ target_node_name_jp = node_list[target_node_id]['name_jp'].encode('utf-8')
+
+ sound_client.say('{} へ移動します'.format(target_node_name_jp))
+
+ rospy.loginfo('executing behaviors to {}'.format(target_node_name_jp))
+ action_server_lead_to.send_goal_and_wait(NavigationGoal(target_node_id=target_node_id))
+
+
+if __name__ == '__main__':
+ main()
diff --git a/jsk_spot_robot/jsk_spot_behavior_manager/package.xml b/jsk_spot_robot/jsk_spot_behavior_manager/package.xml
new file mode 100644
index 0000000000..bc941c558b
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_behavior_manager/package.xml
@@ -0,0 +1,39 @@
+
+
+ jsk_spot_behavior_manager
+ 1.1.0
+ The spot_behavior_manager package
+
+ Kei Okada
+ Koki Shinjo
+ Koki Shinjo
+
+ BSD
+
+ catkin
+
+ rospy
+
+ actionlib
+ networkx
+ roslaunch
+ rospkg
+ rospy
+ sound_play
+ spot_behavior_manager_msgs
+ spot_ros_client
+ std_msgs
+ spot_autowalk_data
+
+ actionlib
+ networkx
+ rospkg
+ rospy
+ roslaunch
+ sound_play
+ spot_behavior_manager_msgs
+ spot_ros_client
+ std_msgs
+
+
+
diff --git a/jsk_spot_robot/jsk_spot_behavior_manager/scripts/visualize_map.py b/jsk_spot_robot/jsk_spot_behavior_manager/scripts/visualize_map.py
new file mode 100755
index 0000000000..f26b7742da
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_behavior_manager/scripts/visualize_map.py
@@ -0,0 +1,84 @@
+#!/usr/bin/env python3
+# -*- encoding: utf-8 -*-
+
+import argparse
+import yaml
+
+from graphviz import Digraph
+
+import gi
+gi.require_version('Gtk','3.0')
+from gi.repository import Gtk
+
+import xdot
+
+
+class MyDotwindow(xdot.DotWindow):
+
+ def __init__(self):
+ xdot.DotWindow.__init__(self)
+ self.dotwidget.connect('clicked', self.on_url_clicked)
+
+ def on_url_clicked(self, widget, url, event):
+ dialog = Gtk.MessageDialog(
+ parent=self,
+ buttons=Gtk.ButtonsType.OK,
+ message_format='{} clicked'.format(url))
+ dialog.connect('response', lambda dialog, response: dialog.destroy())
+ dialog.run()
+ return True
+
+
+def main():
+
+ parser = argparse.ArgumentParser()
+ parser.add_argument('filename')
+ parser.add_argument('--output')
+ args = parser.parse_args()
+
+ filename = args.filename
+
+ with open(filename, 'r') as f:
+ map_data = yaml.load(f, Loader=yaml.FullLoader)
+
+ edges = map_data['edges']
+
+ list_node = []
+ list_behavior_type = []
+ list_color_for_bt = []
+
+ for edge in edges:
+
+ if edge['from'] not in list_node:
+ list_node.append(edge['from'])
+
+ if edge['to'] not in list_node:
+ list_node.append(edge['to'])
+
+ if edge['behavior_type'] not in list_behavior_type:
+ list_behavior_type.append(edge['behavior_type'])
+
+ for index, behavior_type in enumerate(list_behavior_type):
+ list_color_for_bt.append('{} 1.0 1.0'.format(1.0 * index / len(list_behavior_type)))
+
+ dg = Digraph(format='svg')
+
+ for node in list_node:
+ dg.node(node)
+
+ for edge in edges:
+ dg.attr('edge', color=list_color_for_bt[list_behavior_type.index(edge['behavior_type'])])
+ dg.edge(edge['from'], edge['to'], label=edge['behavior_type'].split('.')[2])
+
+
+ if args.output:
+ dg.render(args.output)
+ else:
+ window = MyDotwindow()
+ window.set_dotcode(dg.source.encode('utf-8'))
+ window.connect('delete-event', Gtk.main_quit)
+ Gtk.main()
+
+
+if __name__ == '__main__':
+ main()
diff --git a/jsk_spot_robot/jsk_spot_behavior_manager/setup.py b/jsk_spot_robot/jsk_spot_behavior_manager/setup.py
new file mode 100644
index 0000000000..799b412b34
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_behavior_manager/setup.py
@@ -0,0 +1,9 @@
+from setuptools import setup
+from catkin_pkg.python_setup import generate_distutils_setup
+
+d = generate_distutils_setup(
+ packages=['jsk_spot_behavior_manager'],
+ package_dir={'': 'src'}
+)
+
+setup(**d)
diff --git a/jsk_spot_robot/jsk_spot_behavior_manager/src/jsk_spot_behavior_manager/__init__.py b/jsk_spot_robot/jsk_spot_behavior_manager/src/jsk_spot_behavior_manager/__init__.py
new file mode 100644
index 0000000000..e69de29bb2
diff --git a/jsk_spot_robot/jsk_spot_behavior_manager/src/jsk_spot_behavior_manager/base_behavior.py b/jsk_spot_robot/jsk_spot_behavior_manager/src/jsk_spot_behavior_manager/base_behavior.py
new file mode 100644
index 0000000000..5c3fa4266f
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_behavior_manager/src/jsk_spot_behavior_manager/base_behavior.py
@@ -0,0 +1,51 @@
+# -*- coding: utf-8 -*-
+
+import rospy
+import roslaunch
+
+
+def load_behavior_class(class_string):
+ package_name = class_string.split('.')[0]
+ module_name = class_string.split('.')[1]
+ class_name = class_string.split('.')[2]
+ behavior_class = getattr(
+ getattr(__import__(package_name), module_name), class_name)
+ return behavior_class
+
+
+class BaseBehavior(object):
+
+ def __init__(self, spot_client, sound_client):
+
+ self.spot_client = spot_client
+ self.sound_client = sound_client
+
+ def run_initial(self, start_node, end_node, edge, pre_edge):
+ pass
+
+ def run_main(self, start_node, end_node, edge, pre_edge):
+ pass
+
+ def run_final(self, start_node, end_node, edge, pre_edge):
+ pass
+
+
+class SimpleBehavior(BaseBehavior):
+
+ def run_initial(self, start_node, end_node, edge, pre_edge):
+
+ rospy.loginfo('__run_initial() called')
+ return True
+
+ def run_main(self, start_node, end_node, edge, pre_edge):
+
+ rospy.loginfo('__run_main() called')
+ rospy.loginfo('start_node: {}'.format(start_node))
+ rospy.loginfo('end_node: {}'.format(end_node))
+ rospy.loginfo('edge: {}'.format(edge))
+ rospy.loginfo('pre_edge: {}'.format(pre_edge))
+ return True
+
+ def run_final(self, start_node, end_node, edge, pre_edge):
+
+ rospy.loginfo('__run_finalize() called')
diff --git a/jsk_spot_robot/jsk_spot_behavior_manager/src/jsk_spot_behavior_manager/behavior_graph.py b/jsk_spot_robot/jsk_spot_behavior_manager/src/jsk_spot_behavior_manager/behavior_graph.py
new file mode 100644
index 0000000000..861dcf3c00
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_behavior_manager/src/jsk_spot_behavior_manager/behavior_graph.py
@@ -0,0 +1,99 @@
+# -*- coding: utf-8 -*-
+
+import networkx as nx
+
+
+class GraphEdge:
+
+ def __init__(self,
+ node_id_from,
+ node_id_to,
+ behavior_type,
+ cost,
+ properties
+ ):
+ self.node_id_from = node_id_from
+ self.node_id_to = node_id_to
+ self.behavior_type = behavior_type
+ self.cost = cost
+ self.properties = properties
+
+
+class GraphNode:
+
+ def __init__(self,
+ node_id,
+ properties
+ ):
+ self.node_id = node_id
+ self.properties = properties
+
+
+class BehaviorGraph:
+
+ # 現在の BehaviorGraph の仕様
+ # 重み付きの有向グラフ
+ # あるノードからあるノードまでのエッジの数は 0 or 1
+
+ def __init__(self, raw_edges=[], raw_nodes={}):
+
+ self.edges = {}
+ self.nodes = {}
+ self.network = nx.DiGraph()
+
+ for raw_edge in raw_edges:
+ self.add_edge(raw_edge['from'],
+ raw_edge['to'],
+ raw_edge['behavior_type'],
+ int(raw_edge['cost']),
+ raw_edge['args'])
+
+ for key, raw_node in raw_nodes.items():
+ self.add_node(key, raw_node)
+
+ def calcPath(self, node_id_from, node_id_to):
+
+ try:
+ node_id_list = nx.shortest_path(
+ self.network, node_id_from, node_id_to)
+ except nx.NetworkXNoPath as e:
+ return None
+ path = []
+ for index in range(len(node_id_list)-1):
+ path.append(self.edges[node_id_list[index], node_id_list[index+1]])
+ return path
+
+ def add_node(self,
+ node_id,
+ properties):
+ # TODO: もしすでにnodeがあれば,適切に上書きするようにする
+ # NOTICE: node と edge で整合性を保つようには実装されていない
+ self.nodes[node_id] = GraphNode(node_id, properties)
+
+ def add_edge(self,
+ node_id_from,
+ node_id_to,
+ behavior_type,
+ cost,
+ args):
+ # TODO: もしすでにedgeがあれば,適切に上書きするようにする
+ # NOTICE: node と edge で整合性を保つようには実装されていない
+ edge = GraphEdge(node_id_from,
+ node_id_to,
+ behavior_type,
+ cost,
+ args)
+ self.edges[node_id_from, node_id_to] = edge
+ self.network.add_edge(node_id_from,
+ node_id_to,
+ weight=cost)
+
+ def remove_node(self,
+ node_id):
+ del self.nodes[node_id]
+
+ def remove_edge(self,
+ node_id_from,
+ node_id_to):
+ del self.edges[node_id_from, node_id_to]
+ self.network.remove_edge(node_id_from, node_id_to)
diff --git a/jsk_spot_robot/jsk_spot_behavior_manager/src/jsk_spot_behavior_manager/behavior_manager_node.py b/jsk_spot_robot/jsk_spot_behavior_manager/src/jsk_spot_behavior_manager/behavior_manager_node.py
new file mode 100644
index 0000000000..abb4049ef8
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_behavior_manager/src/jsk_spot_behavior_manager/behavior_manager_node.py
@@ -0,0 +1,236 @@
+# -*- coding: utf-8 -*-
+
+import copy
+import sys
+import traceback
+
+import actionlib
+import rospy
+import roslaunch
+import PyKDL
+
+from sound_play.libsoundplay import SoundClient
+from spot_ros_client.libspotros import SpotRosClient
+
+from jsk_spot_behavior_manager.behavior_graph import BehaviorGraph
+from jsk_spot_behavior_manager.base_behavior import BaseBehavior, load_behavior_class
+
+from std_msgs.msg import String
+from jsk_spot_behavior_msgs.msg import NavigationAction, NavigationFeedback, NavigationResult, NavigationActionFeedback
+from jsk_spot_behavior_msgs.srv import ResetCurrentNode, ResetCurrentNodeResponse
+
+
+class BehaviorManagerNode(object):
+
+ def __init__(self):
+
+ # navigation dictonary
+ raw_edges = rospy.get_param('~map/edges')
+ raw_nodes = rospy.get_param('~map/nodes')
+ self.graph = BehaviorGraph(raw_edges, raw_nodes)
+ self.current_node_id = rospy.get_param('~initial_node_id')
+ self.pre_edge = None
+ self.anchor_pose = None
+
+ # silent mode / dry mode
+ self.silent_mode = rospy.get_param('~silent_mode', False)
+ self.dry_mode = rospy.get_param('~dry_mode', False)
+
+ # get target action name list for synchronizer
+ self.list_action_name_synchronizer = rospy.get_param(
+ '~action_names_synchronizer', [])
+
+ # action clients
+ if self.dry_mode:
+ self.spot_client = None
+ self.sound_client = None
+ else:
+ self.spot_client = SpotRosClient()
+ self.sound_client = SoundClient(
+ blocking=False,
+ sound_action='/robotsound_jp',
+ sound_topic='/robotsound_jp'
+ )
+
+ # publisher
+ self.pub_current_node_id = rospy.Publisher(
+ '~current_node_id', String, queue_size=1)
+
+ # reset service
+ self.service_reset_current_node_id = rospy.Service(
+ '~reset_current_node_id',
+ ResetCurrentNode,
+ self.handler_reset_current_node_id
+ )
+
+ #
+ self.set_anchor_pose()
+
+ #
+ roslaunch.pmon._init_signal_handlers()
+
+ # subscribers
+ self.list_behaviors_execution_actions = []
+ for action_name in self.list_action_name_synchronizer:
+ self.list_behaviors_execution_actions.append(
+ rospy.Subscriber('{}/feedback'.format(action_name), NavigationActionFeedback, self.callback_synchronizer)
+ )
+
+ # action server
+ self.server_execute_behaviors = actionlib.SimpleActionServer(
+ '~execute_behaviors',
+ NavigationAction,
+ execute_cb=self.handler_execute_behaviors,
+ auto_start=False
+ )
+ self.server_execute_behaviors.start()
+
+ rospy.loginfo('Initialized!')
+
+ def say(self, message, blocking=True):
+
+ rospy.loginfo('Saying: {}'.format(message))
+ if not self.silent_mode and not self.dry_mode:
+ self.sound_client.say(message, blocking=blocking)
+
+ def set_anchor_pose(self):
+
+ rospy.loginfo('Set new anchor pose')
+ if not self.dry_mode:
+ self.anchor_pose = self.spot_client.get_robot_pose()
+
+ def go_back_to_anchor_pose(self):
+
+ rospy.loginfo('Going back to an anchor pose')
+ if not self.dry_mode:
+ current_pose = self.spot_client.get_robot_pose()
+ if current_pose is None or self.anchor_pose is None:
+ return False
+ frame_current_to_anchor = current_pose.Inverse() * self.anchor_pose
+ self.spot_client.go_pose(frame_current_to_anchor)
+
+ def callback_synchronizer(self, msg):
+
+ rospy.loginfo('Current node is updated to {}'.format(msg.feedback.current_node_id))
+ self.current_node_id = msg.feedback.current_node_id
+ self.pre_edge = None
+
+ def run(self):
+
+ rate = rospy.Rate(1)
+ while not rospy.is_shutdown():
+ rate.sleep()
+ self.pub_current_node_id.publish(String(data=self.current_node_id))
+
+ def handler_reset_current_node_id(self, req):
+
+ rospy.loginfo('current_node_id is reset to {}'.format(
+ req.current_node_id))
+ self.current_node_id = req.current_node_id
+ self.pre_edge = None
+ self.set_anchor_pose()
+ return ResetCurrentNodeResponse(success=True)
+
+ def handler_execute_behaviors(self, goal):
+
+ rospy.loginfo('Behavior Action started. goal: {}'.format(goal))
+
+ current_graph = copy.deepcopy(self.graph)
+ while True:
+ # path calculation
+ path = current_graph.calcPath(
+ self.current_node_id, goal.target_node_id)
+ if path is None:
+ rospy.logerr('No path from {} to {}'.format(
+ self.current_node_id, goal.target_node_id))
+ self.say('パスが見つかりませんでした')
+ result = NavigationResult(
+ success=False, message='No path found')
+ self.server_execute_behaviors.set_aborted(result)
+ return
+ else:
+ # navigation of edges in the path
+ self.say('目的地に向かいます', blocking=True)
+ self.go_back_to_anchor_pose()
+ success_navigation = True
+ for edge in path:
+ rospy.loginfo('Navigating Edge {}...'.format(edge))
+ try:
+ if self.navigate_edge(edge):
+ rospy.loginfo('Edge {} succeeded.'.format(edge))
+ self.current_node_id = edge.node_id_to
+ self.server_execute_behaviors.publish_feedback(NavigationFeedback(current_node_id=self.current_node_id))
+ self.pre_edge = edge
+ self.set_anchor_pose()
+ else:
+ rospy.logwarn('Edge {} failed'.format(edge))
+ self.say(
+ '移動に失敗しました。経路を探索し直します。', blocking=True)
+ self.server_execute_behaviors.publish_feedback(NavigationFeedback(current_node_id=self.current_node_id))
+ current_graph.remove_edge(
+ edge.node_id_from, edge.node_id_to)
+ success_navigation = False
+ break
+ except Exception as e:
+ rospy.logerr(
+ 'Got an error while navigating edge {}: {}'.format(edge, sys.exc_info()))
+ traceback.print_exc()
+ self.say('エラーが発生しました', blocking=True)
+ self.pre_edge = None
+ result = NavigationResult(
+ success=False,
+ message='Got an error while navigating edge {}: {}'.format(edge, e))
+ self.server_execute_behaviors.set_aborted(result)
+ self.anchor_pose = None
+ return
+
+ if success_navigation:
+ break
+
+ rospy.loginfo('Goal Reached!')
+ self.say('目的地に到着しました.', blocking=True)
+ result = NavigationResult(success=True, message='Goal Reached.')
+ self.server_execute_behaviors.set_succeeded(result)
+ self.set_anchor_pose()
+ return
+
+ def navigate_edge(self, edge):
+
+ # start node id validation
+ if self.current_node_id != edge.node_id_from:
+ rospy.logwarn(
+ 'current_node_id {} does not match node_id_from of edge ({})'.format(
+ self.current_node_id,
+ edge.node_id_from)
+ )
+ return False
+
+ # load behavior class
+ try:
+ behavior_class = load_behavior_class(edge.behavior_type)
+ behavior = behavior_class(
+ self.spot_client,
+ self.sound_client
+ )
+ except Exception as e:
+ rospy.logerr(
+ 'Failed to load and initialize behavior class: {}'.format(sys.exc_info()))
+ traceback.print_exc()
+ self.say('行動クラスを読み込めませんでした', blocking=True)
+ self.pre_edge = None
+ return False
+
+ node_from = self.graph.nodes[edge.node_id_from]
+ node_to = self.graph.nodes[edge.node_id_to]
+
+ # Exception from behavior will be caught in handler
+ success_initial = behavior.run_initial(
+ node_from, node_to, edge, self.pre_edge)
+ if success_initial is False:
+ behavior.run_final(node_from, node_to, edge, self.pre_edge)
+ return False
+ else:
+ success_main = behavior.run_main(
+ node_from, node_to, edge, self.pre_edge)
+ behavior.run_final(node_from, node_to, edge, self.pre_edge)
+ return success_main
diff --git a/jsk_spot_robot/jsk_spot_behavior_msgs/CMakeLists.txt b/jsk_spot_robot/jsk_spot_behavior_msgs/CMakeLists.txt
new file mode 100644
index 0000000000..30e82ce82f
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_behavior_msgs/CMakeLists.txt
@@ -0,0 +1,21 @@
+cmake_minimum_required(VERSION 2.8.3)
+project(jsk_spot_behavior_msgs)
+
+find_package(catkin REQUIRED COMPONENTS genmsg actionlib actionlib_msgs)
+
+add_action_files(
+ DIRECTORY action
+ FILES Navigation.action
+)
+
+add_service_files(
+ DIRECTORY srv
+ FILES ResetCurrentNode.srv
+)
+
+generate_messages(DEPENDENCIES actionlib_msgs)
+
+catkin_package(
+ LIBRARIES jsk_spot_behavior_msgs
+ CATKIN_DEPENDS message_runtime
+)
diff --git a/jsk_spot_robot/jsk_spot_behavior_msgs/action/Navigation.action b/jsk_spot_robot/jsk_spot_behavior_msgs/action/Navigation.action
new file mode 100644
index 0000000000..8f41dfdaf9
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_behavior_msgs/action/Navigation.action
@@ -0,0 +1,6 @@
+string target_node_id
+---
+bool success
+string message
+---
+string current_node_id
diff --git a/jsk_spot_robot/jsk_spot_behavior_msgs/package.xml b/jsk_spot_robot/jsk_spot_behavior_msgs/package.xml
new file mode 100644
index 0000000000..be66e24a55
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_behavior_msgs/package.xml
@@ -0,0 +1,24 @@
+
+
+ jsk_spot_behavior_msgs
+ 1.1.0
+ The jsk_spot_behavior_msgs package
+
+ Koki Shinjo
+ Koki Shinjo
+
+ BSD
+
+ catkin
+
+ actionlib
+ actionlib_msgs
+ message_generation
+
+ actionlib
+ actionlib_msgs
+ message_runtime
+
+
+
+
diff --git a/jsk_spot_robot/jsk_spot_behavior_msgs/srv/ResetCurrentNode.srv b/jsk_spot_robot/jsk_spot_behavior_msgs/srv/ResetCurrentNode.srv
new file mode 100644
index 0000000000..8fa01bd4c0
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_behavior_msgs/srv/ResetCurrentNode.srv
@@ -0,0 +1,3 @@
+string current_node_id
+---
+bool success
diff --git a/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/CMakeLists.txt b/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/CMakeLists.txt
new file mode 100644
index 0000000000..fd9652fb99
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/CMakeLists.txt
@@ -0,0 +1,13 @@
+cmake_minimum_required(VERSION 2.8.3)
+project(spot_basic_behaviors)
+
+find_package(catkin REQUIRED)
+
+catkin_python_setup()
+
+catkin_package(
+)
+
+install(DIRECTORY config launch
+ DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION}
+)
diff --git a/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/README.md b/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/README.md
new file mode 100644
index 0000000000..fa341940b3
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/README.md
@@ -0,0 +1,124 @@
+# spot_basic_behaviors
+
+This package includes exaple implementation of base_behavior for spot_behavior_manager.
+
+## walk behavior
+
+This behavior enables Spot to walk a specified route in a autowalk data from a given waypoint to another waypoint.
+
+behavior name: `spot_basic_behaviors.walk_behavior.WalkBehavior`
+
+https://user-images.githubusercontent.com/9410362/124337233-896f6880-dbdc-11eb-9588-30d4a5193bbd.mp4
+
+### Required Configuration
+
+Before using this behavior, belows are required.
+
+- autowalk data containing a route for the behavior
+- edge and nodes configuration for the behavior
+
+#### Edge
+
+Fields below are required in args of a edge
+
+- `graph`: path to autowalk data
+
+e.g.
+
+```yaml
+- from: 'eng2_73B2'
+ to: 'eng2_73A2'
+ behavior_type: 'spot_basic_behavior.walk_behavior.WalkBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_73B2_to_7FElevator.walk'
+```
+
+#### Start and End Node
+
+Fields below are required for nodes
+
+- `waypoints_on_graph`: list of dict. each dict has `graph`, `id`, `localization_method`
+ + `graph`: path to a autowalk data
+ + `id`: waypoint id of the start node in the graph
+ + `localization_method`: localization_method to be used when starting autowalk, this must be 'fiducial' or 'waypoint'
+
+e.g.
+
+```yaml
+ 'eng2_73B2':
+ waypoints_on_graph:
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_73B2_to_7FElevator.walk'
+ id: 'dyed-bat-t00VKo5XixLihCvpsZPRqw=='
+ localization_method: 'fiducial'
+```
+
+## elevator behavior
+
+This behavior enables Spot to use an elevator to move to anothor floor.
+
+behavior name: `spot_basic_behaviors.elevator_behavior.ElevatorBehavior`
+
+https://user-images.githubusercontent.com/9410362/124337679-cd636d00-dbde-11eb-8db9-c5fedfda4ad9.mp4
+
+### Required Configuration
+
+Before using this behavior, belows are required.
+
+- autowalk data containing a route for the behavior.
+- apriltag pose information for elevator door frame detection.
+- edge and nodes configuration for the behavior
+
+#### autowalk data
+
+To use this behavior, you need to record autowalk data while Spot riding on the elevator and getting off.
+
+Here is an example.
+
+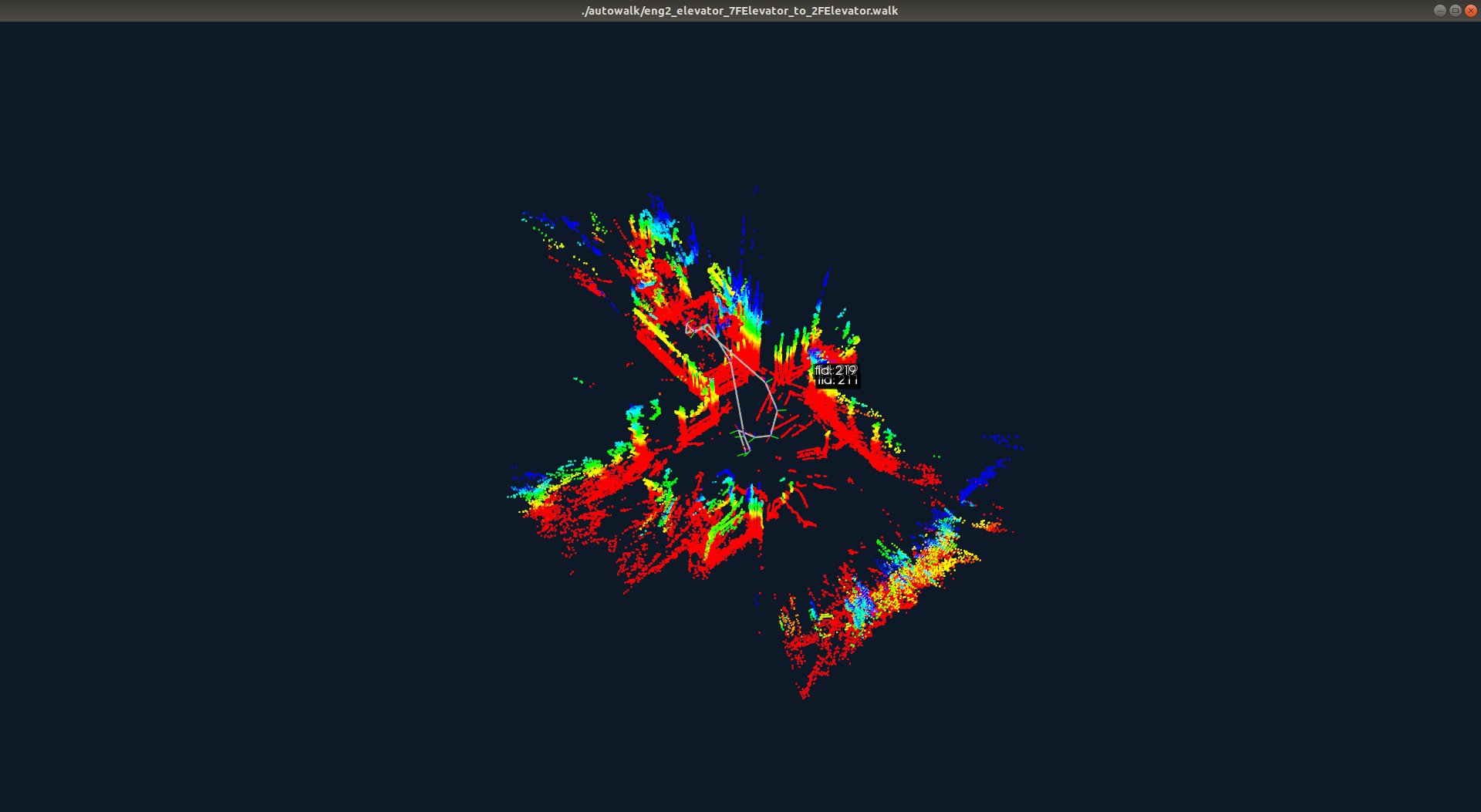
+
+#### apriltag pose information
+
+To use this behavior, an Fiducial (april tag) must be placed on the wall near the elevator doors.
+And for elevator door opening and closing detection, transform from elevator foor frame ( center point on the ground ) to the fiducial is required.
+Please see https://github.com/sktometometo/jsk_robot/blob/b166ef04cb954b175bedd5653af808be35e42121/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/config/apriltag/tags.yaml#L44-L54 for examples
+
+#### Edge
+
+Fields below are required in args of a edge
+
+- `graph`: path to autowalk data
+- `rest_waypoint_id`: waypoint of rest position in a elevator
+
+e.g.
+
+```yaml
+- from: 'eng2_7FElevator'
+ to: 'eng2_2FElevator'
+ behavior_type: 'spot_basic_behavior.elevator_behavior.ElevatorBehavior'
+ cost: 10
+ args:
+ graph: '$(find spot_autowalk_data)/autowalk/eng2_elevator_7FElevator_to_2FElevator.walk'
+ rest_waypoint_id: 'unsaid-collie-jvatvS.7KX9jpzQz61GL4A=='
+```
+
+#### Start and End Node
+
+Fields below are required for nodes
+
+- `waypoints_on_graph`: list of dict. each dict has `graph`, `id`, `localization_method`
+ + `graph`: path to a autowalk data
+ + `id`: waypoint id of the start node in the graph
+ + `localization_method`: localization_method to be used when starting autowalk, this must be 'fiducial' or 'waypoint'
+- `switchbot_device`: switchbot device name for elevator button
+
+e.g.
+
+```yaml
+ 'eng2_7FElevator':
+ waypoints_on_graph:
+ - graph: '$(find spot_autowalk_data)/autowalk/eng2_elevator_7FElevator_to_2FElevator.walk'
+ id: 'sly-chetah-IZ4pVY7vrqO36OoKCYk9Zg=='
+ localization_method: 'fiducial'
+ switchbot_device: '/eng2/7f/elevator/down/button'
+```
diff --git a/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/config/apriltag/settings.yaml b/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/config/apriltag/settings.yaml
new file mode 100644
index 0000000000..9bd12af3d9
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/config/apriltag/settings.yaml
@@ -0,0 +1,9 @@
+tag_family: "tag36h11" # options: tagStandard52h13, tagStandard41h12, tag36h11, tag25h9, tag16h5, tagCustom48h12, tagCircle21h7, tagCircle49h12
+tag_threads: 2 # default: 2
+tag_decimate: 1.0 # default: 1.0
+tag_blur: 0.0 # default: 0.0
+tag_refine_edges: 1 # default: 1
+tag_debug: 0 # default: 0
+max_hamming_dist: 2 # default: 2 (Tunable parameter with 2 being a good choice - values >=3 consume large amounts of memory. Choose the largest value possible.)
+# Other parameters
+publish_tf: true # default: false
diff --git a/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/config/apriltag/tags.yaml b/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/config/apriltag/tags.yaml
new file mode 100644
index 0000000000..6828fdd222
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/config/apriltag/tags.yaml
@@ -0,0 +1,94 @@
+# # Definitions of tags to detect
+#
+# ## General remarks
+#
+# - All length in meters
+# - Ellipsis (...) signifies that the previous element can be repeated multiple times.
+#
+# ## Standalone tag definitions
+# ### Remarks
+#
+# - name is optional
+#
+# ### Syntax
+#
+# standalone_tags:
+# [
+# {id: ID, size: SIZE, name: NAME},
+# ...
+# ]
+standalone_tags: []
+# ## Tag bundle definitions
+# ### Remarks
+#
+# - name is optional
+# - x, y, z have default values of 0 thus they are optional
+# - qw has default value of 1 and qx, qy, qz have default values of 0 thus they are optional
+#
+# ### Syntax
+#
+# tag_bundles:
+# [
+# {
+# name: 'CUSTOM_BUNDLE_NAME',
+# layout:
+# [
+# {id: ID, size: SIZE, x: X_POS, y: Y_POS, z: Z_POS, qw: QUAT_W_VAL, qx: QUAT_X_VAL, qy: QUAT_Y_VAL, qz: QUAT_Z_VAL},
+# ...
+# ]
+# },
+# ...
+# ]
+tag_bundles:
+ [
+ {
+ name: "elevator_door_frame_raw",
+ layout:
+ [
+ {
+ id: 219,
+ size: 0.146,
+ x: -1.7,
+ y: -1.0,
+ z: 0.6,
+ qx: 0.0,
+ qy: 0.7071067811865475,
+ qz: 0.7071067811865476,
+ qw: 0.0,
+ },
+ {
+ id: 211,
+ size: 0.146,
+ x: -1.7,
+ y: -1.0,
+ z: 0.4,
+ qx: 0.0,
+ qy: 0.7071067811865475,
+ qz: 0.7071067811865476,
+ qw: 0.0,
+ },
+ {
+ id: 202,
+ size: 0.146,
+ x: -1.7,
+ y: -1.0,
+ z: 0.4,
+ qx: 0.0,
+ qy: 0.7071067811865475,
+ qz: 0.7071067811865476,
+ qw: 0.0,
+ },
+ {
+ id: 216,
+ size: 0.146,
+ x: -1.7,
+ y: -1.0,
+ z: 0.4,
+ qx: 0.0,
+ qy: 0.7071067811865475,
+ qz: 0.7071067811865476,
+ qw: 0.0,
+ },
+ ],
+ },
+ ]
diff --git a/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/config/switchbot_ros/token.yaml b/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/config/switchbot_ros/token.yaml
new file mode 100644
index 0000000000..bfc61225f6
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/config/switchbot_ros/token.yaml
@@ -0,0 +1 @@
+token: XXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXX
diff --git a/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/launch/elevator_detection.launch b/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/launch/elevator_detection.launch
new file mode 100644
index 0000000000..e5c9f2d921
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/launch/elevator_detection.launch
@@ -0,0 +1,214 @@
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ max_duration: 5.0
+ timeout_duration: 0.05
+ timer_duration: 0.1
+ reference_frame_id: elevator_door_frame_raw
+ output_frame_id: elevator_door_frame
+ fixed_frame_id: odom
+
+
+
+
+
+
+
+ approximate_sync: true
+ output_frame: body
+ input_topics:
+ - $(arg TOPIC_DEPTH_FRONT_RIGHT)/points
+ - $(arg TOPIC_DEPTH_FRONT_LEFT)/points
+ - $(arg TOPIC_DEPTH_RIGHT)/points
+ - $(arg TOPIC_DEPTH_LEFT)/points
+ - $(arg TOPIC_DEPTH_BACK)/points
+
+
+
+
+
+
+
+ initial_pos: [0, 0, 0.5]
+ initial_rot: [0, 0, 0]
+ dimension_x: 0.5
+ dimension_y: 0.5
+ dimension_z: 0.8
+ frame_id: elevator_door_frame
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/package.xml b/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/package.xml
new file mode 100644
index 0000000000..d11b5b7d7f
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/package.xml
@@ -0,0 +1,32 @@
+
+
+ spot_basic_behaviors
+ 1.1.0
+ The spot_basic_behaviors package
+
+ Kei Okada
+ Koki Shinjo
+ Koki Shinjo
+ BSD
+
+ catkin
+
+ spot_behavior_manager
+
+ apriltag_ros
+ depth_image_proc
+ geometry_msgs
+ jsk_pcl_ros
+ jsk_recognition_msgs
+ message_filters
+ sensor_msgs
+ std_msgs
+ switchbot_ros
+ tf2_geometry_msgs
+ tf2_ros
+ tf_relay
+ elevator_operation
+
+
+
+
diff --git a/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/setup.py b/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/setup.py
new file mode 100644
index 0000000000..5518911cd8
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/setup.py
@@ -0,0 +1,9 @@
+from setuptools import setup
+from catkin_pkg.python_setup import generate_distutils_setup
+
+d = generate_distutils_setup(
+ packages=['spot_basic_behaviors'],
+ package_dir={'': 'src'}
+)
+
+setup(**d)
diff --git a/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/src/spot_basic_behaviors/__init__.py b/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/src/spot_basic_behaviors/__init__.py
new file mode 100644
index 0000000000..077d19e4ad
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/src/spot_basic_behaviors/__init__.py
@@ -0,0 +1,2 @@
+import spot_basic_behaviors.walk_behavior as walk_behavior
+import spot_basic_behaviors.elevator_behavior as elevator_behavior
diff --git a/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/src/spot_basic_behaviors/elevator_behavior.py b/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/src/spot_basic_behaviors/elevator_behavior.py
new file mode 100644
index 0000000000..68d212fcbe
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/src/spot_basic_behaviors/elevator_behavior.py
@@ -0,0 +1,279 @@
+# -*- coding: utf-8 -*-
+
+from jsk_spot_behavior_manager.base_behavior import BaseBehavior
+
+import actionlib
+import roslaunch
+import rospkg
+import rospy
+
+import math
+
+from switchbot_ros.msg import SwitchBotCommandGoal, SwitchBotCommandAction
+from sensor_msgs.msg import PointCloud2
+from geometry_msgs.msg import Quaternion
+from std_msgs.msg import Float32, Bool, Int16
+
+
+class ElevatorBehavior(BaseBehavior):
+
+ def door_point_cloud_callback(self, msg):
+ if len(msg.data) == 0:
+ self.door_is_open = True
+ else:
+ self.door_is_open = False
+
+ def current_floor_callback(self, msg):
+ self.current_floor = msg.data
+
+ def rest_elevator_callback(self, msg):
+ self.rest_elevator = msg.data
+
+ def run_initial(self, start_node, end_node, edge, pre_edge):
+
+ rospy.logdebug('run_initial() called')
+
+ self.silent_mode = rospy.get_param('~silent_mode', True)
+
+ start_floor = start_node.properties['floor']
+ rospy.loginfo("Start floor: {}".format(start_floor))
+
+ # launch recognition launch
+ uuid = roslaunch.rlutil.get_or_generate_uuid(None, True)
+ roslaunch_path = rospkg.RosPack().get_path('spot_basic_behaviors') +\
+ '/launch/elevator_detection.launch'
+ cli_args = [roslaunch_path, "initial_floor:={}".format(start_floor)]
+ roslaunch_args = cli_args[1:]
+ roslaunch_file = [(roslaunch.rlutil.resolve_launch_arguments(cli_args)[0], roslaunch_args)]
+ self.roslaunch_parent = roslaunch.parent.ROSLaunchParent(
+ uuid,
+ roslaunch_file
+ )
+ self.roslaunch_parent.start()
+
+ # value for door openring checker
+ self.door_is_open = False
+ self.subscriber_door_check = None
+
+ # elevator state
+ self.current_floor = None
+ self.rest_elevator = None
+
+ self.subscriber_current_floor = rospy.Subscriber("/elevator_state_publisher/current_floor", Int16, self.current_floor_callback)
+ self.subscriber_rest_elevator = rospy.Subscriber("/elevator_state_publisher/rest_elevator", Bool, self.rest_elevator_callback)
+
+ # value for switchbot
+ self.action_client_switchbot = actionlib.SimpleActionClient(
+ '/switchbot_ros/switch',
+ SwitchBotCommandAction
+ )
+
+ if not self.action_client_switchbot.wait_for_server(rospy.Duration(30)):
+ rospy.logerr('switchbot server seems to fail.')
+ return False
+
+ try:
+ end_time = rospy.Time.now() + rospy.Duration(30)
+ except rospy.ROSException:
+ rospy.logerr("Door points topics are not published.")
+ return False
+
+ try:
+ rospy.wait_for_message("/elevator_state_publisher/current_floor", Int16, timeout=rospy.Duration(30))
+ except rospy.ROSException:
+ rospy.logerr("Current floor topics are not published.")
+ return False
+
+ try:
+ rospy.wait_for_message("/elevator_state_publisher/rest_elevator", Bool, timeout=rospy.Duration(30))
+ except rospy.ROSException:
+ rospy.logerr("Elevator state topic are not published.")
+ return False
+
+ return True
+
+ def run_main(self, start_node, end_node, edge, pre_edge):
+
+ rospy.logdebug('run_main() called')
+
+ start_floor = start_node.properties['floor']
+
+ graph_name = edge.properties['graph']
+ start_id = list(filter(
+ lambda x: x['graph'] == graph_name,
+ start_node.properties['waypoints_on_graph']
+ ))[0]['id']
+ end_id = edge.properties['goal_waypoint_id']
+ rest_waypoint_id = edge.properties['rest_waypoint_id']
+ localization_method = list(filter(
+ lambda x: x['graph'] == graph_name,
+ start_node.properties['waypoints_on_graph']
+ ))[0]['localization_method']
+
+ end_floor = end_node.properties['floor']
+
+ # graph uploading and localization
+ if pre_edge is not None and \
+ graph_name == pre_edge.properties['graph']:
+ rospy.loginfo('graph upload and localization skipped.')
+ else:
+ # Upload
+ ret = self.spot_client.upload_graph(graph_name)
+ if ret[0]:
+ rospy.loginfo('graph {} uploaded.'.format(graph_name))
+ else:
+ rospy.logerr('graph uploading failed: {}'.format(ret[1]))
+ return False
+ # Localization
+ if localization_method == 'fiducial':
+ ret = self.spot_client.set_localization_fiducial()
+ elif localization_method == 'waypoint':
+ ret = self.spot_client.set_localization_waypoint(start_id)
+ else:
+ ret = (False, 'Unknown localization method')
+ if ret[0]:
+ rospy.loginfo('robot is localized on the graph.')
+ else:
+ rospy.logwarn('Localization failed: {}'.format(ret[1]))
+ return False
+
+ # start door opening check from outside
+ self.subscriber_door_check = rospy.Subscriber(
+ '/spot_recognition/elevator_door_points',
+ PointCloud2,
+ self.door_point_cloud_callback)
+
+ # push button with switchbot
+ rospy.loginfo('calling elevator when riding...')
+ success_calling = False
+ switchbot_goal = SwitchBotCommandGoal()
+ switchbot_goal.device_name = start_node.properties['switchbot_device_up'] if end_floor > start_floor else start_node.properties['switchbot_device_down']
+ switchbot_goal.command = 'press'
+ count = 0
+ while True:
+ self.action_client_switchbot.send_goal(switchbot_goal)
+ if self.action_client_switchbot.wait_for_result(rospy.Duration(10)):
+ break
+ count += 1
+ if count >= 3:
+ rospy.logerr('switchbot calling failed.')
+ return False
+ result = self.action_client_switchbot.get_result()
+ rospy.loginfo('switchbot result: {}'.format(result))
+ if not result.done:
+ rospy.logerr('switchbot calling failed.')
+ return False
+ rospy.loginfo('elevator calling when riding on has succeeded')
+
+ # wait for elevator
+ rate = rospy.Rate(1)
+ door_open_count = 0
+ while not rospy.is_shutdown():
+ rate.sleep()
+ if self.door_is_open:
+ door_open_count += 1
+ else:
+ door_open_count = 0
+ if door_open_count >= 2:
+ break
+ rospy.loginfo('elevator door opened.')
+ self.subscriber_door_check.unregister()
+ self.subscriber_door_check = None
+
+ # start navigation to rest point
+ rate = rospy.Rate(10)
+ if not self.silent_mode:
+ self.sound_client.say('エレベータに乗り込みます。ご注意ください。', blocking=False)
+ self.spot_client.navigate_to(rest_waypoint_id, blocking=False)
+ # call elevator from destination floor while
+ rospy.loginfo('calling elevator when getting off...')
+ switchbot_goal = SwitchBotCommandGoal()
+ switchbot_goal.device_name = end_node.properties['switchbot_device_up'] if end_floor > start_floor else end_node.properties['switchbot_device_down']
+ switchbot_goal.command = 'press'
+ self.action_client_switchbot.send_goal(switchbot_goal)
+ ##
+ if not self.action_client_switchbot.wait_for_result(timeout=rospy.Duration(20)):
+ rospy.logerr('Switchbot timeout')
+ self.spot_client.wait_for_navigate_to_result()
+ self.spot_client.navigate_to(start_id, blocking=True)
+ self.spot_client.wait_for_navigate_to_result()
+ return False
+ result_switchbot = self.action_client_switchbot.get_result()
+ while not rospy.is_shutdown():
+ switchbot_goal = SwitchBotCommandGoal()
+ switchbot_goal.device_name = start_node.properties['switchbot_device_up'] if end_floor > start_floor else end_node.properties['switchbot_device_down']
+ switchbot_goal.command = 'press'
+ self.action_client_switchbot.send_goal_and_wait(switchbot_goal, execute_timeout=rospy.Duration(10))
+ if self.spot_client.wait_for_navigate_to_result(rospy.Duration(5)):
+ break
+ result_navigation = self.spot_client.get_navigate_to_result()
+ # recovery when riding on
+ if not result_navigation.success or not result_switchbot.done:
+ rospy.logerr('Failed to ride on a elevator. result_navigation: {}, result_switchbot: {}'.format(
+ result_navigation, result_switchbot))
+ self.spot_client.navigate_to(start_id, blocking=True)
+ self.spot_client.wait_for_navigate_to_result()
+ return False
+ else:
+ rospy.loginfo('Riding on succeded.')
+
+ if not self.silent_mode:
+ self.sound_client.say('{}階に行きます'.format(end_floor), blocking=False)
+
+ # start door openning check from inside
+ self.subscriber_door_check = rospy.Subscriber(
+ '/spot_recognition/elevator_door_points',
+ PointCloud2,
+ self.door_point_cloud_callback)
+
+ # check if the door is closed
+ rate = rospy.Rate(2)
+ while not rospy.is_shutdown():
+ rate.sleep()
+ if not self.door_is_open:
+ break
+ rospy.loginfo('elevator door closed')
+
+ # check if the door is open and at the target floor
+ rate = rospy.Rate(1)
+ while not rospy.is_shutdown():
+ rate.sleep()
+ rospy.loginfo('door_is_open: {}, is_target_floor: {}, elevator stop: {}'.format(
+ self.door_is_open, end_floor == self.current_floor, self.rest_elevator))
+ if self.door_is_open and end_floor == self.current_floor and self.rest_elevator:
+ break
+ rospy.loginfo('elevator door opened and at the target_floor')
+
+ # dance before starting to move
+ self.spot_client.pub_body_pose(0.0, Quaternion(w=1))
+ self.spot_client.stand()
+ rospy.sleep(0.5)
+ self.spot_client.pub_body_pose(-0.2, Quaternion(w=1))
+ self.spot_client.stand()
+ rospy.sleep(0.5)
+ self.spot_client.pub_body_pose(0.0, Quaternion(w=1))
+ self.spot_client.stand()
+
+ # get off the elevator
+ self.spot_client.navigate_to(end_id, blocking=True)
+ result = self.spot_client.get_navigate_to_result()
+
+ return result.success
+
+ def run_final(self, start_node, end_node, edge, pre_edge):
+
+ rospy.logdebug('run_finalize() called')
+
+ if self.subscriber_door_check != None:
+ self.subscriber_door_check.unregister()
+ self.subscriber_door_check = None
+
+ if self.subscriber_current_floor != None:
+ self.subscriber_current_floor.unregister()
+ self.subscriber_current_floor = None
+
+ if self.subscriber_rest_elevator != None:
+ self.subscriber_rest_elevator.unregister()
+ self.subscriber_rest_elevator = None
+
+ self.roslaunch_parent.shutdown()
diff --git a/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/src/spot_basic_behaviors/walk_behavior.py b/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/src/spot_basic_behaviors/walk_behavior.py
new file mode 100644
index 0000000000..9f595d0255
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_behaviors/spot_basic_behaviors/src/spot_basic_behaviors/walk_behavior.py
@@ -0,0 +1,94 @@
+# -*- coding: utf-8 -*-
+
+from jsk_spot_behavior_manager.base_behavior import BaseBehavior
+
+import rospy
+
+
+class WalkBehavior(BaseBehavior):
+
+ def run_initial(self, start_node, end_node, edge, pre_edge):
+
+ rospy.logdebug('run_initial() called')
+ self.silent_mode = rospy.get_param('~silent_mode', True)
+ return True
+
+ def run_main(self, start_node, end_node, edge, pre_edge):
+
+ rospy.logdebug('run_main() called')
+
+ graph_name = edge.properties['graph']
+ start_id = list(filter(
+ lambda x: x['graph'] == graph_name,
+ start_node.properties['waypoints_on_graph']
+ ))[0]['id']
+ end_id = list(filter(
+ lambda x: x['graph'] == graph_name,
+ end_node.properties['waypoints_on_graph']
+ ))[0]['id']
+ localization_method = list(filter(
+ lambda x: x['graph'] == graph_name,
+ start_node.properties['waypoints_on_graph']
+ ))[0]['localization_method']
+
+ # graph uploading and localization
+ if pre_edge is not None and \
+ graph_name == pre_edge.properties['graph']:
+ rospy.loginfo('graph upload and localization skipped.')
+ else:
+ # Upload
+ ret = self.spot_client.upload_graph(graph_name)
+ if ret[0]:
+ rospy.loginfo('graph {} uploaded.'.format(graph_name))
+ else:
+ rospy.logerr('graph uploading failed: {}'.format(ret[1]))
+ return False
+ # Localization
+ if localization_method == 'fiducial':
+ ret = self.spot_client.set_localization_fiducial()
+ elif localization_method == 'waypoint':
+ ret = self.spot_client.set_localization_waypoint(start_id)
+ else:
+ ret = (False, 'Unknown localization method')
+ if ret[0]:
+ rospy.loginfo('robot is localized on the graph.')
+ else:
+ rospy.logwarn('Localization failed: {}'.format(ret[1]))
+ return False
+
+ # start navigation
+ success = False
+ rate = rospy.Rate(10)
+ velocity_limit_linear_x = rospy.get_param('/spot_basic_behaviors/walk_behaviors/velocity_limit_linear_x', 1.0)
+ velocity_limit_linear_y = rospy.get_param('/spot_basic_behaviors/walk_behaviors/velocity_limit_linear_y', 1.0)
+ velocity_limit_angular_z = rospy.get_param('/spot_basic_behaviors/walk_behaviors/velocity_limit_angular_z', 1.0)
+ if not self.silent_mode:
+ self.sound_client.say('移動します', blocking=True)
+ self.spot_client.navigate_to(
+ end_id,
+ velocity_limit=(
+ velocity_limit_linear_x,
+ velocity_limit_linear_y,
+ velocity_limit_angular_z
+ ),
+ blocking=False)
+ while not rospy.is_shutdown():
+ rate.sleep()
+ if self.spot_client.wait_for_navigate_to_result(rospy.Duration(0.1)):
+ result = self.spot_client.get_navigate_to_result()
+ success = result.success
+ rospy.loginfo('result: {}'.format(result))
+ break
+
+ # recovery on failure
+ if not success:
+ if not self.silent_mode:
+ self.sound_client.say('失敗したので元に戻ります', blocking=True)
+ self.spot_client.navigate_to(start_id, blocking=True)
+ self.spot_client.wait_for_navigate_to_result()
+
+ return success
+
+ def run_final(self, start_node, end_node, edge, pre_edge):
+
+ rospy.logdebug('run_finalize() called')
diff --git a/jsk_spot_robot/jsk_spot_driver.rosinstall b/jsk_spot_robot/jsk_spot_driver.rosinstall
new file mode 100644
index 0000000000..49d25f998d
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_driver.rosinstall
@@ -0,0 +1,96 @@
+# spot-ros is required for spot
+# This is a develop branch for jsk version.
+# We need to use it until it is merged to master
+# - git:
+# local-name: spot-ros
+# uri: https://github.com/sktometometo/spot_ros.git
+# version: develop/spot
+## use https://github.com/clearpathrobotics/spot_ros/pull/67 (Commands for the Arm and gripper, and URDF and simulation of the arm added)
+# - git:
+# local-name: spot-ros
+# uri: https://github.com/estherRay/spot_ros.git
+# version: b5fe5e5c4a732c1a724e4f86abc2be6395088d02
+## use https://github.com/cst0/spot_ros/pull/4 for Arm and gripper
+- git:
+ local-name: spot-ros
+ uri: https://github.com/k-okada/spot_ros-arm.git
+ version: 0a8c4b29768ae946d7c84aec9a2ae2d185ed97a9
+## to support custom limb name, we need https://github.com/jsk-ros-pkg/jsk_model_tools/pull/249
+- git:
+ local-name: jsk_model_tools
+ uri: https://github.com/k-okada/jsk_model_tools.git
+ version: custom_limb
+#
+# geometry2 have to be built for python3
+- git:
+ local-name: geometry2
+ uri: https://github.com/ros/geometry2.git
+ version: 0.6.5
+# vision_opencv have to be build for python3
+- git:
+ local-name: vision_opencv
+ uri: https://github.com/ros-perception/vision_opencv.git
+ version: 1.13.0
+#
+# pykdl have to be built for python3
+- git:
+ local-name: orocos_kinematics_dynamics
+ uri: https://github.com/orocos/orocos_kinematics_dynamics.git
+ version: v1.4.0
+#
+# mongodb_store need to be built for python3
+- git:
+ local-name: mongodb_store
+ uri: https://github.com/strands-project/mongodb_store.git
+ version: noetic-devel
+#
+# to avtivate python_catkin_install, we need newer catkin
+- git:
+ local-name: catkin
+ uri: https://github.com/ros/catkin.git
+ version: 0.8.10
+#
+# use robot_upstart to install supervisor (https://github.com/clearpathrobotics/robot_upstart/pull/113)
+- git:
+ local-name: robot_upstart
+ uri: https://github.com/k-okada/robot_upstart.git
+ version: develop
+# aques_talk needs to be compiled from source
+- tar:
+ local-name: aques_talk
+ uri: https://github.com/tork-a/jsk_3rdparty-release/archive/refs/tags/release/melodic/aques_talk/2.1.24-2.tar.gz
+# use parallel app_manager
+- git:
+ local-name: app_manager
+ uri: https://github.com/PR2/app_manager.git
+ version: kinetic-devel
+# wait for https://github.com/jsk-ros-pkg/jsk_pr2eus/pull/443 (add volume key arg for robot-interface :speak) to be released
+- git:
+ local-name: jsk_pr2eus
+ uri: https://github.com/jsk-ros-pkg/jsk_pr2eus.git
+ version: master
+#
+#
+# need to add following code to ublox_gps/config/zed_f9p.yaml
+#config_on_startup: true
+#
+#rate: 0.016
+## TMODE3 Config
+#tmode3: 1 # Survey-In Mode
+#sv_in:
+# reset: false # True: disables and re-enables survey-in (resets)
+# # False: Disables survey-in only if TMODE3 is
+# # disabled
+# min_dur: 300 # Survey-In Minimum Duration [s]
+# acc_lim: 3.0 # Survey-In Accuracy Limit [m]
+- git:
+ local-name: ublox
+ uri: https://github.com/KumarRobotics/ublox.git
+# insta360 need latest jsk_perception
+- git:
+ local-name: jsk-ros-pkg/jsk_recognition
+ uri: jsk-ros-pkg/jsk_recognition.git
+# Panoram image recognition need coral_usb, which is not release as apt package.
+- git:
+ local-name: jsk-ros-pkg/coral_usb_ros
+ uri: https://github.com/jsk-ros-pkg/coral_usb_ros.git
diff --git a/jsk_spot_robot/jsk_spot_driver.rosinstall.noetic b/jsk_spot_robot/jsk_spot_driver.rosinstall.noetic
new file mode 100644
index 0000000000..9ad27be062
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_driver.rosinstall.noetic
@@ -0,0 +1,68 @@
+# spot-ros is required for spot
+# This is a develop branch for jsk version.
+# We need to use it until it is merged to master
+# - git:
+# local-name: spot-ros
+# uri: https://github.com/sktometometo/spot_ros.git
+# version: develop/spot
+## use https://github.com/clearpathrobotics/spot_ros/pull/67 (Commands for the Arm and gripper, and URDF and simulation of the arm added)
+# - git:
+# local-name: spot-ros
+# uri: https://github.com/estherRay/spot_ros.git
+# version: b5fe5e5c4a732c1a724e4f86abc2be6395088d02
+## use https://github.com/cst0/spot_ros/pull/4 for Arm and gripper
+- git:
+ local-name: spot-ros
+ uri: https://github.com/k-okada/spot_ros-arm.git
+ version: 0a8c4b29768ae946d7c84aec9a2ae2d185ed97a9
+## to support custom limb name, we need https://github.com/jsk-ros-pkg/jsk_model_tools/pull/249
+- git:
+ local-name: jsk_model_tools
+ uri: https://github.com/k-okada/jsk_model_tools.git
+ version: custom_limb
+#
+# use robot_upstart to install supervisor (https://github.com/clearpathrobotics/robot_upstart/pull/113)
+- git:
+ local-name: robot_upstart
+ uri: https://github.com/k-okada/robot_upstart.git
+ version: develop
+# aques_talk needs to be compiled from source
+- tar:
+ local-name: aques_talk
+ uri: https://github.com/tork-a/jsk_3rdparty-release/archive/refs/tags/release/melodic/aques_talk/2.1.24-2.tar.gz
+# use parallel app_manager
+- git:
+ local-name: app_manager
+ uri: https://github.com/PR2/app_manager.git
+ version: kinetic-devel
+# wait for https://github.com/jsk-ros-pkg/jsk_pr2eus/pull/443 (add volume key arg for robot-interface :speak) to be released
+- git:
+ local-name: jsk_pr2eus
+ uri: https://github.com/jsk-ros-pkg/jsk_pr2eus.git
+ version: master
+#
+#
+# need to add following code to ublox_gps/config/zed_f9p.yaml
+#config_on_startup: true
+#
+#rate: 0.016
+## TMODE3 Config
+#tmode3: 1 # Survey-In Mode
+#sv_in:
+# reset: false # True: disables and re-enables survey-in (resets)
+# # False: Disables survey-in only if TMODE3 is
+# # disabled
+# min_dur: 300 # Survey-In Minimum Duration [s]
+# acc_lim: 3.0 # Survey-In Accuracy Limit [m]
+- git:
+ local-name: ublox
+ uri: https://github.com/KumarRobotics/ublox.git
+# insta360 need latest jsk_perception
+- git:
+ local-name: jsk-ros-pkg/jsk_recognition
+ uri: jsk-ros-pkg/jsk_recognition.git
+ version: master
+# Panoram image recognition need coral_usb, which is not release as apt package.
+- git:
+ local-name: jsk-ros-pkg/coral_usb_ros
+ uri: https://github.com/jsk-ros-pkg/coral_usb_ros.git
diff --git a/jsk_spot_robot/jsk_spot_startup/CMakeLists.txt b/jsk_spot_robot/jsk_spot_startup/CMakeLists.txt
new file mode 100644
index 0000000000..7552ce0555
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_startup/CMakeLists.txt
@@ -0,0 +1,44 @@
+cmake_minimum_required(VERSION 2.8.3)
+project(jsk_spot_startup)
+
+find_package(catkin REQUIRED)
+
+
+###################################
+## catkin specific configuration ##
+###################################
+catkin_package()
+
+
+#############
+## Install ##
+#############
+install(DIRECTORY auth config launch scripts services udev_rules template
+ DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION}
+ USE_SOURCE_PERMISSIONS
+)
+
+file(GLOB_RECURSE SCRIPT_PROGRAMS node_scripts/*)
+foreach(SCRIPT_PROGRAM ${SCRIPT_PROGRAMS})
+ if("${SCRIPT_PROGRAM}" MATCHES ".*\\.py$")
+ catkin_install_python(PROGRAMS ${SCRIPT_PROGRAM} DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION}/node_scripts)
+ else()
+ install(PROGRAMS ${SCRIPT_PROGRAM} DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION}/node_scripts)
+ endif()
+endforeach()
+
+
+#############
+## Testing ##
+#############
+if(CATKIN_ENABLE_TESTING)
+ find_package(catkin REQUIRED COMPONENTS roslaunch roslint)
+ file(GLOB LAUNCH_FILES launch/*.launch)
+ foreach(LAUNCH_FILE ${LAUNCH_FILES})
+ roslaunch_add_file_check(${LAUNCH_FILE})
+ endforeach()
+
+ set(ROSLINT_PYTHON_OPTS --max-line-length=180 --ignore=E221,E222,E241) # skip multiple spaces before/after operator
+ roslint_python()
+ roslint_add_test()
+endif()
diff --git a/jsk_spot_robot/jsk_spot_startup/apps/app.installed b/jsk_spot_robot/jsk_spot_startup/apps/app.installed
new file mode 100644
index 0000000000..eb14ab712a
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_startup/apps/app.installed
@@ -0,0 +1,7 @@
+apps:
+- app: jsk_spot_startup/hello_world
+ dispay: Hello World
+- app: jsk_spot_startup/head_lead_demo
+ dispay: Head Lead Demo
+- app: jsk_spot_startup/sample_elevator
+ dispay: Sample Elevator
diff --git a/jsk_spot_robot/jsk_spot_startup/apps/head_lead_demo/head-lead-teleop.l b/jsk_spot_robot/jsk_spot_startup/apps/head_lead_demo/head-lead-teleop.l
new file mode 100755
index 0000000000..8548d7f372
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_startup/apps/head_lead_demo/head-lead-teleop.l
@@ -0,0 +1,297 @@
+#!/usr/bin/env roseus
+
+(ros::roseus-add-msgs "std_msgs")
+
+(setq *continue* t)
+;; control head-lead
+(setq *head-lead* t)
+;; (setq *head-lead* nil)
+(load "package://spoteus/spot-interface.l")
+(spot-init)
+(if (eq (send *ri* :state :power-state-shore-power-state) 'on-shore-power)
+ (send *ri* :undock))
+;; (send *ri* :set-impedance-param :linear-stiffness #f(250 250 250) :rotational-stiffness #f(30 30 30) :linear-damping #f(1.5 1.5 1.5) :rotational-damping #f(0.5 0.5 0.5))
+;; (send *ri* :set-impedance-param :linear-stiffness #f(250 25 25) :rotational-stiffness #f(30 5 5) :linear-damping #f(1.5 1.5 1.5) :rotational-damping #f(0.5 0.5 0.5))
+
+(setq *default-av* #f(0.0 -130.0 120.0 0.0 10.0 0.0))
+
+;; sample
+(setq *person* nil)
+(setq *ball* nil)
+(setq *ball-name* nil)
+(setq *last-detected-time* (ros::time-now))
+(defclass ncb-result-synchronizer
+ :super exact-time-message-filter)
+
+(defmethod ncb-result-synchronizer
+ (:callback (bbox rects result)
+ (setq *last-detected-time* (ros::time-now))
+ (let (len ret)
+ (setq len (length (send bbox :boxes)))
+ (dotimes (i len)
+ (ros::ros-info (format nil "found ~A (~A) in ~A sec ago in ~A"
+ (elt (send result :label_names) i)
+ (elt (send result :label_proba) i)
+ (send (ros::time- (ros::time-now) (send bbox :header :stamp)) :to-sec)
+ (cdr (assoc "topic" (send result :connection-header) :test #'string=))))
+ (cond ((string= (elt (send result :label_names) i) "person")
+ (send *ri* :speak "p")
+ (push (list (send result :header :frame_id) (elt (send rects :rects) i) (elt (send bbox :boxes) i)) *person*))
+ ((or (string= (elt (send result :label_names) i) "soccer ball")
+ (string= (elt (send result :label_names) i) "pokemon ball")
+ (string= (elt (send result :label_names) i) "dice"))
+ (send *ri* :speak "ball")
+ (push (list (send result :header :frame_id)
+ (elt (send rects :rects) i)
+ (elt (send bbox :boxes) i)
+ (elt (send result :label_names) i))
+ *ball*))))
+ ;; results are (list image rect box); to get box user (elt x 2) or (third x)
+ (setq *person* (sort *person* #'< #'(lambda (x) (send (elt x 2) :value))))
+ (setq *ball* (sort *ball* #'< #'(lambda (x) (send (elt x 2) :value))))
+ )) ;; :callback
+ )
+(ros::roseus-add-msgs "jsk_recognition_msgs")
+
+(setq synchronizers nil)
+(dolist (image (list "left_fisheye_image" "right_fisheye_image"
+ "frontleft_fisheye_image" "frontright_fisheye_image"
+ "hand_color_image" "back_fisheye_image"))
+ (push (instance ncb-result-synchronizer :init
+ (list (list (format nil "/spot/ncb_provider/~A/bbox_array" image) jsk_recognition_msgs::BoundingBoxArray)
+ (list (format nil "/spot/ncb_provider/~A/rects" image) jsk_recognition_msgs::RectArray)
+ (list (format nil "/spot/ncb_provider/~A/class" image) jsk_recognition_msgs::ClassificationResult))) synchronizers))
+
+(defun init-walk-arm-setting ()
+ (send *spot* :arm :angle-vector #f(0.0 -130.0 120.0 0.0 10.0 0.0))
+ (send *ri* :angle-vector (send *spot* :angle-vector) 1000 :default-controller)
+ (send *ri* :stop-grasp)
+ (send *ri* :wait-interpolation)
+ (send *ri* :set-impedance-param
+ :linear-stiffness #f(250 25 75) ;; z(up) y(side) x(front)
+ :rotational-stiffness #f(3 30 30)
+ :linear-damping #f(1.5 1.0 1.0)
+ :rotational-damping #f(0.1 0.5 0.5))
+ (setq hand-pos (ros::pos->tf-point (send *spot* :hand :end-coords :worldpos)))
+ (ros::set-param "end_effector_to_joy/center_x" (send hand-pos :x))
+ (ros::set-param "end_effector_to_joy/center_y" (send hand-pos :y))
+ (unless (ros::wait-for-service "end_effector_to_joy/set_enabled" 10)
+ (ros::ros-error "end_effector_to_joy/set_enabled not found, so quitting")
+ (return-from init-walk-arm-setting :finished))
+ (ros::service-call "end_effector_to_joy/set_enabled" (instance std_srvs::SetBoolRequest :init :data *head-lead*))
+ )
+
+(defun start-func (args)
+ (when (not (eq (send *ri* :state :power-state-shore-power-state) 'off-shore-power))
+ (send *ri* :speak "Robot is on dock")
+ (ros::ros-error "Robot is on dock or powered, quit from apps")
+ ;(return-from start-func :finished)
+ )
+ (send *ri* :speak "Hello, let's start walking")
+ (if *head-lead*
+ (init-walk-arm-setting)
+ (progn
+ (send *spot* :arm :angle-vector #f(0 -180 180 90 0 -90))
+ (send *ri* :angle-vector (send *spot* :angle-vector) 2000)
+ (send *ri* :stow-arm)
+ (send *ri* :stop-grasp)
+ (send *ri* :wait-interpolation)))
+ :started)
+
+(defun end-func (args)
+ (ros::ros-info "end-func")
+ (send *ri* :speak "Thank You")
+ (send *ri* :stow-arm)
+ (unless (ros::wait-for-service "end_effector_to_joy/set_enabled" 10)
+ (ros::ros-error "end_effector_to_joy/set_enabled not found, so quitting")
+ (return-from end-func :finished))
+ (ros::service-call "end_effector_to_joy/set_enabled" (instance std_srvs::SetBoolRequest :init :data nil))
+ :finished)
+
+;; *cmd-vel* is (cons (ros::time-now) msg)
+(defun walk-func (args)
+ (let ((still-sec 0)
+ (countdown 0))
+ (ros::ros-info "walk-func")
+ (do-until-key
+ (ros::rate 2)
+ (ros::spin-once)
+ (if *cmd-vel*
+ (setq still-sec (send (ros::time- (ros::time-now) (car *cmd-vel*)) :to-sec)))
+ (ros::ros-info "continue... ~A, still-sec ~A" *continue* still-sec)
+ (if (null *continue*) (return-from walk-func :finished))
+ (if *cmd-vel*
+ (ros::ros-info "cmd-vel ... ~A sec ago ~A (~A)"
+ still-sec
+ (float-vector (send (cdr *cmd-vel*) :linear :x) (send (cdr *cmd-vel*) :linear :y) (send (cdr *cmd-vel*) :angular :z))
+ (norm (float-vector (send (cdr *cmd-vel*) :linear :x) (send (cdr *cmd-vel*) :linear :y) (send (cdr *cmd-vel*) :angular :z)))))
+ (when (> still-sec countdown)
+ (send *ri* :speak (format nil "~A" (case countdown (0 "z") (2 "fu") (4 "shi") (6 "mu") (8 "ya") (10 "tou") (t countdown))))
+ (setq countdown (+ (ceiling still-sec) 1)))
+ (if (and *cmd-vel* (> still-sec 10))
+ (return-from walk-func :not-pull))
+ (ros::sleep))
+ :finished))
+
+(setq *distance-thre* 2000)
+(defun ball-play-func (args)
+ (ros::ros-info "ball-play")
+ (ros::spin-once)
+ (block
+ :cond
+ (cond ((send *ri* :interpolatingp)
+ (ros::ros-info "robot is moving..."))
+ (*ball*
+ (send *ri* :speak "found ball")
+ (ros::service-call "end_effector_to_joy/set_enabled" (instance std_srvs::SetBoolRequest :init :data nil))
+ (ros::ros-info "found ball ~A" *ball*)
+ (ros::ros-info "found ~A" (mapcar #'ros::tf-pose->coords (send-all (mapcar #'third *ball*) :pose)))
+ (ros::ros-info " ~A" (mapcar #'second *ball*))
+ (ros::ros-info " ~A" (mapcar #'fourth *ball*))
+ (send *ri* :stow-arm)
+ (let ((image-source (first (car *ball*)))
+ (bbox (third (car *ball*)))
+ (rect (second (car *ball*)))
+ (ball-name (fourth (car *ball*)))
+ result)
+ (ros::ros-info "distance ~A (< ~A)" (norm (send (ros::tf-pose->coords (send bbox :pose)) :worldpos)) *distance-thre*)
+ (when (> (norm (send (ros::tf-pose->coords (send bbox :pose)) :worldpos)) *distance-thre*)
+ (send *ri* :speak "too far")
+ (setq *ball* nil)
+ (return-from :cond nil))
+ ;; look at the ball
+ (send *spot* :head :look-at
+ (v+ (float-vector 0 0 (/ (send bbox :dimensions :z) 2))
+ (send (ros::tf-pose->coords (send bbox :pose)) :worldpos)))
+ (send *ri* :angle-vector (send *spot* :angle-vector) 1000)
+ (send *ri* :wait-interpolation)
+ (unix::sleep 1)
+ (send *ri* :pick-object-in-image image-source
+ (+ (send rect :x) (/ (send rect :width) 2))
+ (+ (send rect :y) (/ (send rect :height) 2)))
+ (ros::publish "/spot/pick_object_in_image/pick_object"
+ (instance std_msgs::String :init :data ball-name))
+ (while (= (send *ri* :pick-object-in-image-get-state) actionlib_msgs::GoalStatus::*active*)
+ (ros::ros-info "wait for pick... ~A"
+ (if (send *ri* :pick-object-in-image-feedback-msg)
+ (send *ri* :pick-object-in-image-feedback-msg :feedback :status)))
+ (ros::duration-sleep 1))
+ (setq result (send *ri* :pick-object-in-image-wait-for-result))
+ (if (send result :success)
+ (progn
+ (send *ri* :speak "good")
+ (ros::ros-info "succeeded to pick object"))
+ (progn
+ (send *ri* :speak "too bad")
+ (ros::ros-info "failed to pick object")
+ (send *ri* :stop-grasp)
+ ;;(unix::sleep 2) ;; ?? prevent from walking????
+ ))
+ (if *head-lead*
+ (progn
+ (send *spot* :arm :angle-vector *default-av*)
+ (send *ri* :angle-vector (send *spot* :angle-vector) 1000)
+ (send *ri* :wait-interpolation)
+ )
+ (progn
+ (send *spot* :arm :angle-vector #f(0 -180 180 90 0 -90))
+ (send *ri* :angle-vector (send *spot* :angle-vector) 2000)
+ (send *ri* :wait-interpolation)
+ (send *ri* :stow-arm)
+ ))
+ (when (send result :success)
+ (send *ri* :go-pos -0.5 0 0)
+ (when *head-lead*
+ (send *spot* :arm :wrist-p :joint-angle 30)
+ (send *ri* :angle-vector (send *spot* :angle-vector) 500))
+ (send *ri* :stop-grasp))
+ (setq *ball* nil)
+ (ros::rate 1)
+ (if *head-lead* (init-walk-arm-setting))
+ ))
+ (*person*
+ (send *ri* :speak "found person")
+ (ros::ros-info "found person ~A" *person*)
+ (ros::ros-info "found person ~A" (mapcar #'ros::tf-pose->coords (send-all (mapcar #'third *person*) :pose)))
+ (ros::ros-info " ~A" (mapcar #'second *person*))
+ (ros::service-call "end_effector_to_joy/set_enabled" (instance std_srvs::SetBoolRequest :init :data nil))
+ (send *spot* :arm :angle-vector *default-av*)
+ (send *spot* :head :look-at (v+
+ (float-vector 0 0 (/ (send (third (car *person*)) :dimensions :z) 2))
+ (send (ros::tf-pose->coords (send (third (car *person*)) :pose)) :worldpos)))
+ (send *ri* :angle-vector (send *spot* :angle-vector) 500)
+ (setq *person* nil)
+ (send *ri* :wait-interpolation)
+ (if *head-lead* (init-walk-arm-setting)))
+ (t
+ (ros::ros-info (format nil "nothing found ..... last detected object is ~A sec ago" (send (ros::time- (ros::time-now) *last-detected-time*) :to-sec)))
+ (when (and
+ *head-lead*
+ (> (send (ros::time- (ros::time-now) *last-detected-time*) :to-sec) 10)
+ (> (norm (v- (coerce (mapcar #'(lambda (x) (elt (send *ri* :state :angle-vector) x)) (mapcar #'(lambda (x) (position x (send *spot* :joint-list))) (send *spot* :arm :joint-list))) float-vector) *default-av*)) 10))
+ (ros::service-call "end_effector_to_joy/set_enabled" (instance std_srvs::SetBoolRequest :init :data nil))
+ (send *spot* :arm :angle-vector *default-av*)
+ (send *ri* :angle-vector (send *spot* :angle-vector) 500)
+ (send *ri* :wait-interpolation)
+ (init-walk-arm-setting)
+ ))
+ )) ;; cond
+ :walk)
+;;
+(load "package://roseus_smach/src/state-machine-ros.l")
+(defun walk-sm ()
+ (let (sm)
+ (setq sm
+ (make-state-machine
+ '((:start :started :walk) ;; transitions (node transition node)
+ (:start :finished :end)
+ (:walk :finished :end)
+ (:walk :not-pull :ball-play)
+ (:ball-play :walk :walk)
+ (:ball-play :finished :end)
+ (:end :finished :goal)
+ )
+ '((:start 'start-func) ;; node-to-function maps
+ (:end 'end-func)
+ (:walk 'walk-func)
+ (:ball-play 'ball-play-func)
+ )
+ '(:start) ;; initial node
+ '(:goal) ;; goal node
+ ))
+ (send sm :arg-keys 'description)
+ sm))
+
+;; create robot interface
+(unless (boundp '*ri*) (spot-init))
+(objects (list *spot*))
+
+;;
+
+;; this does not work...
+;; (unix:signal unix::sigint '(lambda-closure nil 0 0 (sig code) (setq *continue* nil)))
+
+;; https://github.com/jsk-ros-pkg/jsk_roseus/pull/717
+;; did not work, when we subscribe image data ???
+
+(defun ros::roseus-sigint-handler (sig code)
+ (ros::ros-warn (format nil "ros::roseus-sigint-handler ~A" sig))
+ (setq *continue* nil))
+(unix:signal unix::sigint 'ros::roseus-sigint-handler)
+
+;; send start-func (set-impedance) when R Stick button is pressed
+(ros::subscribe "/joy_dualsense" sensor_msgs::Joy
+ #'(lambda (msg)
+ (if (and (> (length (send msg :buttons)) 11)
+ (= (elt (send msg :buttons) 11) 1))
+ (start-func nil)))
+ 20)
+(setq *cmd-vel* (cons (ros::time-now) (instance geometry_msgs::Twist :init)))
+(ros::subscribe "/spot/cmd_vel" geometry_msgs::Twist
+ #'(lambda (msg) (setq *cmd-vel* (cons (ros::time-now) msg))) 20)
+
+(ros::advertise "/spot/pick_object_in_image/pick_object" std_msgs::String 1 t)
+
+;; state machine
+(exec-state-machine (walk-sm) '((description . "お散歩しました!")(image . "")))
+(exit)
diff --git a/jsk_spot_robot/jsk_spot_startup/apps/head_lead_demo/head_lead_demo.app b/jsk_spot_robot/jsk_spot_startup/apps/head_lead_demo/head_lead_demo.app
new file mode 100644
index 0000000000..500d55e80a
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_startup/apps/head_lead_demo/head_lead_demo.app
@@ -0,0 +1,5 @@
+display: Head Lead Demo
+platform: spot
+launch: jsk_spot_startup/head_lead_demo.xml
+interface: jsk_spot_startup/head_lead_demo.interface
+
diff --git a/jsk_spot_robot/jsk_spot_startup/apps/head_lead_demo/head_lead_demo.interface b/jsk_spot_robot/jsk_spot_startup/apps/head_lead_demo/head_lead_demo.interface
new file mode 100644
index 0000000000..c27c9c296e
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_startup/apps/head_lead_demo/head_lead_demo.interface
@@ -0,0 +1,3 @@
+published_topics: {}
+subscribed_topics: {}
+
diff --git a/jsk_spot_robot/jsk_spot_startup/apps/head_lead_demo/head_lead_demo.xml b/jsk_spot_robot/jsk_spot_startup/apps/head_lead_demo/head_lead_demo.xml
new file mode 100644
index 0000000000..bee6b6b5e4
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_startup/apps/head_lead_demo/head_lead_demo.xml
@@ -0,0 +1,42 @@
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/jsk_spot_robot/jsk_spot_startup/apps/hello_world/hello-world.l b/jsk_spot_robot/jsk_spot_startup/apps/hello_world/hello-world.l
new file mode 100755
index 0000000000..3f6ad67077
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_startup/apps/hello_world/hello-world.l
@@ -0,0 +1,78 @@
+#!/usr/bin/env roseus
+
+(setq *continue* t)
+(load "package://spoteus/spot-interface.l")
+(spot-init)
+(if (eq (send *ri* :state :power-state-shore-power-state) 'on-shore-power)
+ (send *ri* :undock))
+
+(defun init-pose ()
+ (send *spot* :reset-pose)
+ (send *spot* :arm :move-end-pos #f(0 0 250) :world)
+ )
+
+(defun start-func (args)
+ (init-pose)
+ (send *ri* :angle-vector (send *spot* :angle-vector) 500 :default-controller)
+ (send *ri* :wait-interpolation)
+ :started)
+
+(defun end-func (args)
+ (send *ri* :stow-arm)
+ :finished)
+
+(defun hello-func (args)
+ (send *ri* :speak "Hello" :volume 1.0)
+ (init-pose)
+ (send *spot* :arm :move-end-rot -20 :z :parent)
+ (send *spot* :arm :move-end-rot -10 :x :parent)
+ (send *ri* :angle-vector (send *spot* :angle-vector) 150 :default-controller)
+ (send *ri* :wait-interpolation)
+ ;;
+ (send *ri* :speak "World" :volume 1.0)
+ (init-pose)
+ (send *spot* :arm :move-end-rot 20 :z :parent)
+ (send *spot* :arm :move-end-rot -10 :x :parent)
+ (send *ri* :angle-vector (send *spot* :angle-vector) 150 :default-controller)
+ (send *ri* :wait-interpolation)
+ :finished)
+;;
+(load "package://roseus_smach/src/state-machine-ros.l")
+(defun hello-sm ()
+ (let (sm)
+ (setq sm
+ (make-state-machine
+ '((:start :started :hello) ;; transitions (node transition node)
+ (:hello :finished :end)
+ (:end :finished :goal)
+ )
+ '((:start 'start-func) ;; node-to-function maps
+ (:end 'end-func)
+ (:hello 'hello-func)
+ )
+ '(:start) ;; initial node
+ '(:goal) ;; goal node
+ ))
+ (send sm :arg-keys 'description)
+ sm))
+
+;; create robot interface
+(unless (boundp '*ri*) (spot-init))
+(objects (list *spot*))
+
+;;
+
+;; this does not work...
+;; (unix:signal unix::sigint '(lambda-closure nil 0 0 (sig code) (setq *continue* nil)))
+
+;; https://github.com/jsk-ros-pkg/jsk_roseus/pull/717
+;; did not work, when we subscribe image data ???
+
+(defun ros::roseus-sigint-handler (sig code)
+ (ros::ros-warn (format nil "ros::roseus-sigint-handler ~A" sig))
+ (setq *continue* nil))
+(unix:signal unix::sigint 'ros::roseus-sigint-handler)
+
+;; state machine
+(exec-state-machine (hello-sm) '((description . "Hello World")(image . "")))
+(exit)
diff --git a/jsk_spot_robot/jsk_spot_startup/apps/hello_world/hello_world.app b/jsk_spot_robot/jsk_spot_startup/apps/hello_world/hello_world.app
new file mode 100644
index 0000000000..ae8dc86a34
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_startup/apps/hello_world/hello_world.app
@@ -0,0 +1,5 @@
+display: Hello World
+platform: spot
+launch: jsk_spot_startup/hello_world.xml
+interface: jsk_spot_startup/hello_world.interface
+
diff --git a/jsk_spot_robot/jsk_spot_startup/apps/hello_world/hello_world.interface b/jsk_spot_robot/jsk_spot_startup/apps/hello_world/hello_world.interface
new file mode 100644
index 0000000000..c27c9c296e
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_startup/apps/hello_world/hello_world.interface
@@ -0,0 +1,3 @@
+published_topics: {}
+subscribed_topics: {}
+
diff --git a/jsk_spot_robot/jsk_spot_startup/apps/hello_world/hello_world.xml b/jsk_spot_robot/jsk_spot_startup/apps/hello_world/hello_world.xml
new file mode 100644
index 0000000000..15a5b233e7
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_startup/apps/hello_world/hello_world.xml
@@ -0,0 +1,6 @@
+
+
+
+
+
+
diff --git a/jsk_spot_robot/jsk_spot_startup/apps/sample_elevator/sample_elevator.app b/jsk_spot_robot/jsk_spot_startup/apps/sample_elevator/sample_elevator.app
new file mode 100644
index 0000000000..2fdff70260
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_startup/apps/sample_elevator/sample_elevator.app
@@ -0,0 +1,75 @@
+display: Sample Elevator
+platform: spot
+launch: jsk_spot_startup/sample_elevator.xml
+interface: jsk_spot_startup/sample_elevator.interface
+plugins:
+ - name: panorama_video_recorder_plugin
+ type: app_recorder/video_recorder_plugin
+ launch_args:
+ video_path: /tmp
+ video_title: sample_elevator_panorama.avi
+ video_topic_name: /dual_fisheye_to_panorama/output
+ video_fps: 1.0
+ - name: rosbag_recorder_plugin
+ type: app_recorder/rosbag_recorder_plugin
+ launch_args:
+ rosbag_path: /tmp
+ rosbag_title: sample_elevator_rosbag.bag
+ compress: true
+ rosbag_topic_names:
+ - /rosout
+ - /tf
+ - /tf_static
+ - /joint_states
+ - /odom
+ - /elevator_accel
+ - /elevator_accel_filtered
+ - /elevator_altitude
+ - /elevator_state_publisher/current_floor
+ - /elevator_state_publisher/elevator_movement
+ - /elevator_state_publisher/rest_elevator
+ - /m5stack_core2_driver/imu
+ - /m5stack_core2_driver/pressure
+ - /m5stack_core2_driver/temperature
+ - name: result_recorder_plugin
+ type: app_recorder/result_recorder_plugin
+ plugin_args:
+ result_path: /tmp
+ result_title: sample_elevator_result.yaml
+ - name: gdrive_uploader_plugin
+ type: app_uploader/gdrive_uploader_plugin
+ plugin_args:
+ upload_file_paths:
+ - /tmp/sample_elevator_result.yaml
+ - /tmp/sample_elevator_panorama.avi
+ - /tmp/sample_elevator_rosbag.bag
+ upload_file_titles:
+ - sample_elevator_result.yaml
+ - sample_elevator_panorama.avi
+ - sample_elevator_rosbag.bag
+ upload_parents_path: spot_sample_elevator
+ upload_server_name: /gdrive_server
+ - name: speech_notifier_plugin
+ type: app_notifier/speech_notifier_plugin
+ plugin_args:
+ client_name: /sound_play
+ - name: mail_notifier_plugin
+ type: app_notifier/mail_notifier_plugin
+ plugin_args:
+ mail_title: Spot Sample Elevator demo
+ use_timestamp_title: true
+ sender_address: belka@jsk.imi.i.u-tokyo.ac.jp
+ receiver_address: spot@jsk.imi.i.u-tokyo.ac.jp
+plugin_order:
+ start_plugin_order:
+ - panorama_video_recorder_plugin
+ - rosbag_recorder_plugin
+ - result_recorder_plugin
+ - gdrive_uploader_plugin
+ - mail_notifier_plugin
+ stop_plugin_order:
+ - panorama_video_recorder_plugin
+ - rosbag_recorder_plugin
+ - result_recorder_plugin
+ - gdrive_uploader_plugin
+ - mail_notifier_plugin
diff --git a/jsk_spot_robot/jsk_spot_startup/apps/sample_elevator/sample_elevator.interface b/jsk_spot_robot/jsk_spot_startup/apps/sample_elevator/sample_elevator.interface
new file mode 100644
index 0000000000..c27c9c296e
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_startup/apps/sample_elevator/sample_elevator.interface
@@ -0,0 +1,3 @@
+published_topics: {}
+subscribed_topics: {}
+
diff --git a/jsk_spot_robot/jsk_spot_startup/apps/sample_elevator/sample_elevator.py b/jsk_spot_robot/jsk_spot_startup/apps/sample_elevator/sample_elevator.py
new file mode 100755
index 0000000000..00372e57e8
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_startup/apps/sample_elevator/sample_elevator.py
@@ -0,0 +1,32 @@
+#!/usr/bin/env python3
+
+import rospy
+from spot_ros_client.libspotros import SpotRosClient
+import actionlib
+from jsk_spot_behavior_msgs.msg import NavigationAction
+from jsk_spot_behavior_msgs.msg import NavigationGoal
+
+
+if __name__ == '__main__':
+
+ rospy.init_node("sample_elevator")
+ client = SpotRosClient()
+
+ behavior_client = actionlib.SimpleActionClient("/spot_behavior_manager_server/execute_behaviors", NavigationAction)
+ behavior_client.wait_for_server()
+
+ client.claim()
+ client.power_on()
+ client.undock()
+
+ client.reset_current_node('eng2_73B2_dock')
+ client.execute_behaviors(target_node_id="eng2_3FElevator")
+ client.wait_execute_behaviors_result()
+ result = client.get_execute_behaviors_result()
+ rospy.loginfo("Result forward: {} {}".format(result.success, result.message))
+
+ client.execute_behaviors(NavigationGoal(target_node_id="eng2_73B2_dock"))
+ result = client.get_execute_behaviors_result()
+ rospy.loginfo("Result backward: {} {}".format(result.success, result.message))
+
+ client.dock(521)
diff --git a/jsk_spot_robot/jsk_spot_startup/apps/sample_elevator/sample_elevator.xml b/jsk_spot_robot/jsk_spot_startup/apps/sample_elevator/sample_elevator.xml
new file mode 100644
index 0000000000..f3497f43d5
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_startup/apps/sample_elevator/sample_elevator.xml
@@ -0,0 +1,9 @@
+
+
+
+
+
+
+
+
diff --git a/jsk_spot_robot/jsk_spot_startup/auth/spot_credential.yaml b/jsk_spot_robot/jsk_spot_startup/auth/spot_credential.yaml
new file mode 100644
index 0000000000..a9e90c9bf1
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_startup/auth/spot_credential.yaml
@@ -0,0 +1,4 @@
+username: "dummyusername"
+password: "dummypassword"
+hostname: "192.168.50.3"
+dock_id: 521
diff --git a/jsk_spot_robot/jsk_spot_startup/config/dualsense_teleop_twist_joy.yaml b/jsk_spot_robot/jsk_spot_startup/config/dualsense_teleop_twist_joy.yaml
new file mode 100644
index 0000000000..bfd30e14b0
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_startup/config/dualsense_teleop_twist_joy.yaml
@@ -0,0 +1,17 @@
+axis_linear:
+ x: 1
+ y: 0
+scale_linear:
+ x: 1.0
+ y: 0.8
+scale_linear_turbo:
+ x: 1.5
+ y: 1.2
+axis_angular:
+ yaw: 2
+scale_angular:
+ yaw: 1.0
+scale_angular_turbo:
+ yaw: 2.0
+enable_button: 4
+enable_turbo_button: 10
diff --git a/jsk_spot_robot/jsk_spot_startup/config/head_teleop_twist_joy.yaml b/jsk_spot_robot/jsk_spot_startup/config/head_teleop_twist_joy.yaml
new file mode 100644
index 0000000000..364aaf2941
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_startup/config/head_teleop_twist_joy.yaml
@@ -0,0 +1,13 @@
+axis_linear:
+ x: 0
+ y: 1
+ x_min: -0.5
+ x_max: 1.25
+ y_min: -0.5
+ y_max: 0.5
+axis_angular:
+ yaw: 2
+ yaw_min: -0.75
+ yaw_max: 0.75
+enable_button: 0
+enable_turbo_button: -1
diff --git a/jsk_spot_robot/jsk_spot_startup/config/spot.rviz b/jsk_spot_robot/jsk_spot_startup/config/spot.rviz
new file mode 100644
index 0000000000..c732bf2766
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_startup/config/spot.rviz
@@ -0,0 +1,505 @@
+Panels:
+ - Class: rviz/Displays
+ Help Height: 0
+ Name: Displays
+ Property Tree Widget:
+ Expanded:
+ - /DepthClouds1/FrontLeftDepthCloud1/Autocompute Value Bounds1
+ - /DepthClouds1/FrontRightDepthCloud1/Autocompute Value Bounds1
+ - /DepthClouds1/LeftDepthCloud1/Autocompute Value Bounds1
+ - /DepthClouds1/RightDepthCloud1/Autocompute Value Bounds1
+ - /DepthClouds1/RearDepthCloud1/Autocompute Value Bounds1
+ Splitter Ratio: 0.6832844614982605
+ Tree Height: 441
+ - Class: rviz/Selection
+ Name: Selection
+ - Class: rviz/Tool Properties
+ Expanded:
+ - /2D Pose Estimate1
+ - /2D Nav Goal1
+ - /Publish Point1
+ Name: Tool Properties
+ Splitter Ratio: 0.5886790156364441
+ - Class: rviz/Views
+ Expanded:
+ - /Current View1
+ - /Current View1/Focal Point1
+ Name: Views
+ Splitter Ratio: 0.5
+ - Class: rviz/Time
+ Experimental: false
+ Name: Time
+ SyncMode: 0
+ SyncSource: FrontLeftDepthCloud
+Preferences:
+ PromptSaveOnExit: true
+Toolbars:
+ toolButtonStyle: 2
+Visualization Manager:
+ Class: ""
+ Displays:
+ - Alpha: 1
+ Class: rviz/RobotModel
+ Collision Enabled: false
+ Enabled: true
+ Links:
+ All Links Enabled: true
+ Expand Joint Details: false
+ Expand Link Details: false
+ Expand Tree: false
+ Link Tree Style: Links in Alphabetic Order
+ base_link:
+ Alpha: 1
+ Show Axes: false
+ Show Trail: false
+ body:
+ Alpha: 1
+ Show Axes: false
+ Show Trail: false
+ Value: true
+ front_left_hip:
+ Alpha: 1
+ Show Axes: false
+ Show Trail: false
+ Value: true
+ front_left_lower_leg:
+ Alpha: 1
+ Show Axes: false
+ Show Trail: false
+ Value: true
+ front_left_upper_leg:
+ Alpha: 1
+ Show Axes: false
+ Show Trail: false
+ Value: true
+ front_rail:
+ Alpha: 1
+ Show Axes: false
+ Show Trail: false
+ front_right_hip:
+ Alpha: 1
+ Show Axes: false
+ Show Trail: false
+ Value: true
+ front_right_lower_leg:
+ Alpha: 1
+ Show Axes: false
+ Show Trail: false
+ Value: true
+ front_right_upper_leg:
+ Alpha: 1
+ Show Axes: false
+ Show Trail: false
+ Value: true
+ insta360_link:
+ Alpha: 1
+ Show Axes: false
+ Show Trail: false
+ jsk_head_mount_frame:
+ Alpha: 1
+ Show Axes: false
+ Show Trail: false
+ jsk_payload_frame:
+ Alpha: 1
+ Show Axes: false
+ Show Trail: false
+ rear_left_hip:
+ Alpha: 1
+ Show Axes: false
+ Show Trail: false
+ Value: true
+ rear_left_lower_leg:
+ Alpha: 1
+ Show Axes: false
+ Show Trail: false
+ Value: true
+ rear_left_upper_leg:
+ Alpha: 1
+ Show Axes: false
+ Show Trail: false
+ Value: true
+ rear_rail:
+ Alpha: 1
+ Show Axes: false
+ Show Trail: false
+ rear_right_hip:
+ Alpha: 1
+ Show Axes: false
+ Show Trail: false
+ Value: true
+ rear_right_lower_leg:
+ Alpha: 1
+ Show Axes: false
+ Show Trail: false
+ Value: true
+ rear_right_upper_leg:
+ Alpha: 1
+ Show Axes: false
+ Show Trail: false
+ Value: true
+ Name: RobotModel
+ Robot Description: robot_description
+ TF Prefix: ""
+ Update Interval: 0
+ Value: true
+ Visual Enabled: true
+ - Class: rviz/TF
+ Enabled: false
+ Frame Timeout: 15
+ Frames:
+ All Enabled: true
+ Marker Scale: 0.25
+ Name: TF
+ Show Arrows: true
+ Show Axes: true
+ Show Names: true
+ Tree:
+ {}
+ Update Interval: 0
+ Value: false
+ - Class: rviz/Group
+ Displays:
+ - Alpha: 1
+ Auto Size:
+ Auto Size Factor: 1
+ Value: true
+ Autocompute Intensity Bounds: true
+ Autocompute Value Bounds:
+ Max Value: 2.072983741760254
+ Min Value: 0.4096323251724243
+ Value: true
+ Axis: Z
+ Channel Name: intensity
+ Class: rviz/DepthCloud
+ Color: 255; 255; 255
+ Color Image Topic: ""
+ Color Transformer: AxisColor
+ Color Transport Hint: raw
+ Decay Time: 0
+ Depth Map Topic: /spot/depth/frontleft/image
+ Depth Map Transport Hint: raw
+ Enabled: true
+ Invert Rainbow: false
+ Max Color: 255; 255; 255
+ Max Intensity: 4096
+ Min Color: 0; 0; 0
+ Min Intensity: 0
+ Name: FrontLeftDepthCloud
+ Occlusion Compensation:
+ Occlusion Time-Out: 30
+ Value: false
+ Position Transformer: XYZ
+ Queue Size: 5
+ Selectable: true
+ Size (Pixels): 3
+ Style: Flat Squares
+ Topic Filter: true
+ Use Fixed Frame: true
+ Use rainbow: true
+ Value: true
+ - Alpha: 1
+ Auto Size:
+ Auto Size Factor: 1
+ Value: true
+ Autocompute Intensity Bounds: true
+ Autocompute Value Bounds:
+ Max Value: 3.060708999633789
+ Min Value: 0.31034958362579346
+ Value: true
+ Axis: Z
+ Channel Name: intensity
+ Class: rviz/DepthCloud
+ Color: 255; 255; 255
+ Color Image Topic: ""
+ Color Transformer: AxisColor
+ Color Transport Hint: raw
+ Decay Time: 0
+ Depth Map Topic: /spot/depth/frontright/image
+ Depth Map Transport Hint: raw
+ Enabled: true
+ Invert Rainbow: false
+ Max Color: 255; 255; 255
+ Max Intensity: 4096
+ Min Color: 0; 0; 0
+ Min Intensity: 0
+ Name: FrontRightDepthCloud
+ Occlusion Compensation:
+ Occlusion Time-Out: 30
+ Value: false
+ Position Transformer: XYZ
+ Queue Size: 5
+ Selectable: true
+ Size (Pixels): 3
+ Style: Flat Squares
+ Topic Filter: true
+ Use Fixed Frame: true
+ Use rainbow: true
+ Value: true
+ - Alpha: 1
+ Auto Size:
+ Auto Size Factor: 1
+ Value: true
+ Autocompute Intensity Bounds: true
+ Autocompute Value Bounds:
+ Max Value: 1.9569889307022095
+ Min Value: 0.40128064155578613
+ Value: true
+ Axis: Z
+ Channel Name: intensity
+ Class: rviz/DepthCloud
+ Color: 255; 255; 255
+ Color Image Topic: ""
+ Color Transformer: AxisColor
+ Color Transport Hint: raw
+ Decay Time: 0
+ Depth Map Topic: /spot/depth/left/image
+ Depth Map Transport Hint: raw
+ Enabled: true
+ Invert Rainbow: false
+ Max Color: 255; 255; 255
+ Max Intensity: 4096
+ Min Color: 0; 0; 0
+ Min Intensity: 0
+ Name: LeftDepthCloud
+ Occlusion Compensation:
+ Occlusion Time-Out: 30
+ Value: false
+ Position Transformer: XYZ
+ Queue Size: 5
+ Selectable: true
+ Size (Pixels): 3
+ Style: Flat Squares
+ Topic Filter: true
+ Use Fixed Frame: true
+ Use rainbow: true
+ Value: true
+ - Alpha: 1
+ Auto Size:
+ Auto Size Factor: 1
+ Value: true
+ Autocompute Intensity Bounds: true
+ Autocompute Value Bounds:
+ Max Value: 2.684413433074951
+ Min Value: 0.4553413391113281
+ Value: true
+ Axis: Z
+ Channel Name: intensity
+ Class: rviz/DepthCloud
+ Color: 255; 255; 255
+ Color Image Topic: ""
+ Color Transformer: AxisColor
+ Color Transport Hint: raw
+ Decay Time: 0
+ Depth Map Topic: /spot/depth/right/image
+ Depth Map Transport Hint: raw
+ Enabled: true
+ Invert Rainbow: false
+ Max Color: 255; 255; 255
+ Max Intensity: 4096
+ Min Color: 0; 0; 0
+ Min Intensity: 0
+ Name: RightDepthCloud
+ Occlusion Compensation:
+ Occlusion Time-Out: 30
+ Value: false
+ Position Transformer: XYZ
+ Queue Size: 5
+ Selectable: true
+ Size (Pixels): 3
+ Style: Flat Squares
+ Topic Filter: true
+ Use Fixed Frame: true
+ Use rainbow: true
+ Value: true
+ - Alpha: 1
+ Auto Size:
+ Auto Size Factor: 1
+ Value: true
+ Autocompute Intensity Bounds: true
+ Autocompute Value Bounds:
+ Max Value: 4.3172607421875
+ Min Value: 0.1980423927307129
+ Value: true
+ Axis: Z
+ Channel Name: intensity
+ Class: rviz/DepthCloud
+ Color: 255; 255; 255
+ Color Image Topic: ""
+ Color Transformer: AxisColor
+ Color Transport Hint: raw
+ Decay Time: 0
+ Depth Map Topic: /spot/depth/back/image
+ Depth Map Transport Hint: raw
+ Enabled: true
+ Invert Rainbow: false
+ Max Color: 255; 255; 255
+ Max Intensity: 4096
+ Min Color: 0; 0; 0
+ Min Intensity: 0
+ Name: RearDepthCloud
+ Occlusion Compensation:
+ Occlusion Time-Out: 30
+ Value: false
+ Position Transformer: XYZ
+ Queue Size: 5
+ Selectable: true
+ Size (Pixels): 3
+ Style: Flat Squares
+ Topic Filter: true
+ Use Fixed Frame: true
+ Use rainbow: true
+ Value: true
+ Enabled: true
+ Name: DepthClouds
+ - Class: jsk_rviz_plugin/OverlayImage
+ Enabled: true
+ Name: PanoramaImage
+ Topic: /dual_fisheye_to_panorama/output
+ Value: true
+ alpha: 0.800000011920929
+ height: 128
+ keep aspect ratio: true
+ left: 0
+ overwrite alpha value: false
+ top: 0
+ transport hint: raw
+ width: 700
+ - Class: jsk_rviz_plugin/OverlayImage
+ Enabled: true
+ Name: PanoramaDetection
+ Topic: /spot_recognition/object_detection_image
+ Value: true
+ alpha: 0.800000011920929
+ height: 128
+ keep aspect ratio: true
+ left: 0
+ overwrite alpha value: false
+ top: 0
+ transport hint: raw
+ width: 700
+ - Class: jsk_rviz_plugin/TFTrajectory
+ Enabled: true
+ Name: BodyTrajectory
+ Value: true
+ color: 25; 255; 240
+ duration: 1000
+ frame: base_link
+ line_width: 0.009999999776482582
+ - Class: jsk_rviz_plugin/PieChart
+ Enabled: true
+ Name: SpotBattery
+ Topic: /spot/status/battery_percentage
+ Value: true
+ auto color change: false
+ background color: 0; 0; 0
+ backround alpha: 0
+ clockwise rotate direction: false
+ foreground alpha: 0.699999988079071
+ foreground alpha 2: 0.4000000059604645
+ foreground color: 25; 255; 240
+ left: 750
+ max color: 255; 0; 0
+ max value: 100
+ min value: 0
+ show caption: true
+ size: 128
+ text size: 10
+ top: 50
+ - Class: jsk_rviz_plugin/PieChart
+ Enabled: true
+ Name: LaptopBattery
+ Topic: /spot/status/laptop_battery_percentage
+ Value: true
+ auto color change: false
+ background color: 0; 0; 0
+ backround alpha: 0
+ clockwise rotate direction: false
+ foreground alpha: 0.699999988079071
+ foreground alpha 2: 0.4000000059604645
+ foreground color: 25; 255; 240
+ left: 900
+ max color: 255; 0; 0
+ max value: 100
+ min value: 0
+ show caption: true
+ size: 128
+ text size: 10
+ top: 50
+ - Class: jsk_rviz_plugin/BoundingBoxArray
+ Enabled: true
+ Name: DetectedObjects
+ Topic: /spot_recognition/bbox_array
+ Unreliable: false
+ Value: true
+ alpha: 0.800000011920929
+ color: 25; 255; 0
+ coloring: Label
+ line width: 0.05000000074505806
+ only edge: true
+ show coords: false
+ Enabled: true
+ Global Options:
+ Background Color: 48; 48; 48
+ Default Light: true
+ Fixed Frame: odom
+ Frame Rate: 30
+ Name: root
+ Tools:
+ - Class: rviz/Interact
+ Hide Inactive Objects: true
+ - Class: rviz/MoveCamera
+ - Class: rviz/Select
+ - Class: rviz/FocusCamera
+ - Class: rviz/Measure
+ - Class: rviz/SetInitialPose
+ Theta std deviation: 0.2617993950843811
+ Topic: /initialpose
+ X std deviation: 0.5
+ Y std deviation: 0.5
+ - Class: rviz/SetGoal
+ Topic: /move_base_simple/goal
+ - Class: rviz/PublishPoint
+ Single click: true
+ Topic: /clicked_point
+ Value: true
+ Views:
+ Current:
+ Class: rviz/Orbit
+ Distance: 8.482810974121094
+ Enable Stereo Rendering:
+ Stereo Eye Separation: 0.05999999865889549
+ Stereo Focal Distance: 1
+ Swap Stereo Eyes: false
+ Value: false
+ Focal Point:
+ X: 0
+ Y: 0
+ Z: 0
+ Focal Shape Fixed Size: true
+ Focal Shape Size: 0.05000000074505806
+ Invert Z Axis: false
+ Name: Current View
+ Near Clip Distance: 0.009999999776482582
+ Pitch: 0.3449980318546295
+ Target Frame: base_link
+ Value: Orbit (rviz)
+ Yaw: 4.94684362411499
+ Saved: ~
+Window Geometry:
+ Displays:
+ collapsed: true
+ Height: 1025
+ Hide Left Dock: true
+ Hide Right Dock: true
+ QMainWindow State: 000000ff00000000fd00000004000000000000015700000363fc0200000012fb0000001200530065006c0065006300740069006f006e00000001e10000009b0000005c00fffffffb0000001e0054006f006f006c002000500072006f007000650072007400690065007302000001ed000001df00000185000000a3fb000000120056006900650077007300200054006f006f02000001df000002110000018500000122fb000000200054006f006f006c002000500072006f0070006500720074006900650073003203000002880000011d000002210000017afb000000100044006900730070006c006100790073000000003d00000363000000c900fffffffb0000002000730065006c0065006300740069006f006e00200062007500660066006500720200000138000000aa0000023a00000294fb00000014005700690064006500530074006500720065006f02000000e6000000d2000003ee0000030bfb0000000c004b0069006e0065006300740200000186000001060000030c00000261fb000000280020002d0020005400720061006a006500630074006f0072007900200053006c00690064006500720000000000ffffffff0000000000000000fb0000001c004d006f00740069006f006e0050006c0061006e006e0069006e006700000002300000018e0000000000000000fb00000044004d006f00740069006f006e0050006c0061006e006e0069006e00670020002d0020005400720061006a006500630074006f0072007900200053006c00690064006500720000000000ffffffff0000000000000000fb0000000a0049006d00610067006501000001f2000001ae0000000000000000fb0000000a0049006d00610067006501000002f4000000ca0000000000000000fb0000000a0049006d006100670065000000013f000000660000000000000000fb0000000a0049006d0061006700650000000164000000940000000000000000fb0000000a0049006d00610067006500000001a3000000e80000000000000000fc00000227000001970000000000fffffffa000000000100000002fb0000000a0049006d0061006700650000000000ffffffff0000000000000000fb0000000a0049006d0061006700650000000000000002ad0000000000000000fb0000000a0049006d00610067006503000004f5000002820000028800000157000000010000010f00000363fc0200000003fb0000001e0054006f006f006c002000500072006f00700065007200740069006500730100000041000000780000000000000000fb0000000a00560069006500770073000000003d00000363000000a400fffffffb0000001200530065006c0065006300740069006f006e010000025a000000b200000000000000000000000200000490000000a9fc0100000001fb0000000a00560069006500770073030000004e00000080000002e10000019700000003000007800000003efc0100000002fb0000000800540069006d0065010000000000000780000002eb00fffffffb0000000800540069006d00650100000000000004500000000000000000000007800000036300000004000000040000000800000008fc0000000100000002000000010000000a0054006f006f006c00730100000000ffffffff0000000000000000
+ Selection:
+ collapsed: false
+ Time:
+ collapsed: false
+ Tool Properties:
+ collapsed: false
+ Views:
+ collapsed: true
+ Width: 1920
+ X: 0
+ Y: 27
diff --git a/jsk_spot_robot/jsk_spot_startup/config/twist_mux.yaml b/jsk_spot_robot/jsk_spot_startup/config/twist_mux.yaml
new file mode 100644
index 0000000000..f5df2a4c8c
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_startup/config/twist_mux.yaml
@@ -0,0 +1,13 @@
+topics:
+#
+# priority 9: high <--> 1: low
+#
+- name : bt_joy
+ topic : bluetooth_teleop/cmd_vel
+ timeout : 0.5
+ priority: 9
+- name : head_joy
+ topic : joy_head/cmd_vel
+ timeout : 0.5
+ priority: 7
+locks: []
diff --git a/jsk_spot_robot/jsk_spot_startup/launch/include/driver.launch b/jsk_spot_robot/jsk_spot_startup/launch/include/driver.launch
new file mode 100644
index 0000000000..26e4953b77
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_startup/launch/include/driver.launch
@@ -0,0 +1,195 @@
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/jsk_spot_robot/jsk_spot_startup/launch/include/interaction.launch b/jsk_spot_robot/jsk_spot_startup/launch/include/interaction.launch
new file mode 100644
index 0000000000..d4f6ae4788
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_startup/launch/include/interaction.launch
@@ -0,0 +1,43 @@
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/jsk_spot_robot/jsk_spot_startup/launch/include/lifelog.launch b/jsk_spot_robot/jsk_spot_startup/launch/include/lifelog.launch
new file mode 100644
index 0000000000..3e6195e067
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_startup/launch/include/lifelog.launch
@@ -0,0 +1,224 @@
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ approximate_sync: true
+ topics:
+ - /publish_trigger_mongodb_event
+ - /spot/camera/hand_color/image/compressed
+ - /spot/camera/frontleft/image/compressed
+ - /spot/camera/frontright/image/compressed
+ - /spot/camera/left/image/compressed
+ - /spot/camera/right/image/compressed
+ - /spot/camera/back/image/compressed
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ topics:
+ - /spot/ncb_provider/back_fisheye_image/class
+ - /spot/ncb_provider/frontleft_fisheye_image/class
+ - /spot/ncb_provider/frontright_fisheye_image/class
+ - /spot/ncb_provider/hand_color_image/class
+ - /spot/ncb_provider/left_fisheye_image/class
+ - /spot/ncb_provider/right_fisheye_image/class
+
+
+
+
+
+
+ topics:
+ - /spot/ncb_provider/bbox_array
+
+
+
+
+
+ topics:
+ - /ublox/fix
+ - /ublox/fix_velocity
+
+
+
+
+ periodic: false
+ threshold: 0.01
+
+
+
+ white_list:
+ type:
+ - control_msgs/FollowJointTrajectoryActionFeedback
+ - control_msgs/FollowJointTrajectoryActionGoal
+ - control_msgs/FollowJointTrajectoryActionResult
+ - pr2_common_action_msgs/TuckArmsActionFeedback
+ - pr2_common_action_msgs/TuckArmsActionGoal
+ - pr2_common_action_msgs/TuckArmsActionResult
+ - pr2_controllers_msgs/PointHeadActionFeedback
+ - pr2_controllers_msgs/PointHeadActionGoal
+ - pr2_controllers_msgs/PointHeadActionResult
+ - pr2_controllers_msgs/Pr2GripperCommandActionFeedback
+ - pr2_controllers_msgs/Pr2GripperCommandActionGoal
+ - pr2_controllers_msgs/Pr2GripperCommandActionResult
+ - sound_play/SoundRequestActionResult
+ - sound_play/SoundRequestActionGoal
+ - spot_msgs/PickObjectInImageActionGoal
+ - spot_msgs/PickObjectInImageActionResult
+
+
+
+ topics:
+ - /sound_play/goal
+ - /robotsound/goal
+ - /robotsound_jp/goal
+ - /sound_play
+ - /robotsound
+ - /robotsound_jp
+
+
+
+ topics:
+ - /faces_name
+ - /aws_auto_checkin_app/output/class
+ - /aws_detect_faces/attributes
+
+
+
diff --git a/jsk_spot_robot/jsk_spot_startup/launch/include/lifelog_rgb_image.launch b/jsk_spot_robot/jsk_spot_startup/launch/include/lifelog_rgb_image.launch
new file mode 100644
index 0000000000..6f0f1e4a28
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_startup/launch/include/lifelog_rgb_image.launch
@@ -0,0 +1,19 @@
+
+
+
+
+
+
+
+
+
+
+
+ enable_monitor: false
+ vital_check: false
+
+
+
diff --git a/jsk_spot_robot/jsk_spot_startup/launch/include/panorama_detection.launch b/jsk_spot_robot/jsk_spot_startup/launch/include/panorama_detection.launch
new file mode 100644
index 0000000000..0def9ef903
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_startup/launch/include/panorama_detection.launch
@@ -0,0 +1,58 @@
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ score_thresh: 0.6
+ model_file: $(arg model_file)
+ label_file: $(arg label_file)
+ image_transport: raw
+ device_id: $(arg device_id)
+ n_split: $(arg n_split)
+ overlap: $(arg overlap)
+ enable_visualization: false
+
+
+
+
+
+
+
+
+
+
+
+ frame_fixed: "odom"
+ dimensions_labels:
+ person: [0.5, 0.5, 1.5]
+ car: [4.0, 4.0, 2.0]
+ truck: [4.0, 4.0, 3.0]
+
+
+
diff --git a/jsk_spot_robot/jsk_spot_startup/launch/include/perception.launch b/jsk_spot_robot/jsk_spot_startup/launch/include/perception.launch
new file mode 100644
index 0000000000..1772e298c1
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_startup/launch/include/perception.launch
@@ -0,0 +1,80 @@
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ image_sources: $(arg image_sources)
+ ml_service: $(arg ml_service)
+ ml_models: $(arg ml_models)
+ ml_confidence: $(arg ml_confidence)
+ use_gui: $(arg use_gui)
+
+
+
+
+
+
+
+
+ use_window: $(arg use_gui)
+ aws_credentials_path: $(arg aws_credential_config)
+ always_publish: false
+ attributes: ALL
+
+
+
+
+
+
+
+ use_window: $(arg use_gui)
+ env_path: $(arg aws_credential_config)
+ aws_credentials_path: $(arg aws_credential_config)
+ always_publish: false
+ approximate_sync: true
+ queue_size: 1
+ image_transport: compressed
+
+
+
+
+
+
+
+
+ font_path: $(find jsk_recognition_utils)/font_data/NotoSansJP-Regular.otf
+ use_classification_result: true
+ label_size: 16
+ approximate_sync: true
+ queue_size: 30
+ image_transport: compressed
+
+
+
+
diff --git a/jsk_spot_robot/jsk_spot_startup/launch/include/peripheral.launch b/jsk_spot_robot/jsk_spot_startup/launch/include/peripheral.launch
new file mode 100644
index 0000000000..8a4bcc949f
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_startup/launch/include/peripheral.launch
@@ -0,0 +1,14 @@
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/jsk_spot_robot/jsk_spot_startup/launch/jsk_spot_bringup.launch b/jsk_spot_robot/jsk_spot_startup/launch/jsk_spot_bringup.launch
new file mode 100644
index 0000000000..494c2c6dac
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_startup/launch/jsk_spot_bringup.launch
@@ -0,0 +1,43 @@
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/jsk_spot_robot/jsk_spot_startup/launch/rosbag_play.launch b/jsk_spot_robot/jsk_spot_startup/launch/rosbag_play.launch
new file mode 100644
index 0000000000..d3e8eee15a
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_startup/launch/rosbag_play.launch
@@ -0,0 +1,140 @@
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/jsk_spot_robot/jsk_spot_startup/launch/rosbag_record.launch b/jsk_spot_robot/jsk_spot_startup/launch/rosbag_record.launch
new file mode 100644
index 0000000000..7fe113e663
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_startup/launch/rosbag_record.launch
@@ -0,0 +1,179 @@
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/jsk_spot_robot/jsk_spot_startup/launch/rviz.launch b/jsk_spot_robot/jsk_spot_startup/launch/rviz.launch
new file mode 100644
index 0000000000..2d9fce1f16
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_startup/launch/rviz.launch
@@ -0,0 +1,11 @@
+
+
+
+
+
diff --git a/jsk_spot_robot/jsk_spot_startup/launch/sample_pick_object_in_image.launch b/jsk_spot_robot/jsk_spot_startup/launch/sample_pick_object_in_image.launch
new file mode 100644
index 0000000000..103827e8e4
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_startup/launch/sample_pick_object_in_image.launch
@@ -0,0 +1,12 @@
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/jsk_spot_robot/jsk_spot_startup/node_scripts/battery_notifier.py b/jsk_spot_robot/jsk_spot_startup/node_scripts/battery_notifier.py
new file mode 100755
index 0000000000..e35b6ceae2
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_startup/node_scripts/battery_notifier.py
@@ -0,0 +1,133 @@
+#!/usr/bin/env python
+# -*- encoding: utf-8 -*-
+
+import rospy
+from std_msgs.msg import Bool
+from std_srvs.srv import Trigger, TriggerRequest
+from spot_msgs.msg import BatteryStateArray
+from sensor_msgs.msg import BatteryState
+
+from sound_play.libsoundplay import SoundClient
+
+
+class SpotBatteryNotifier(object):
+
+ def __init__(self):
+
+ self._battery_spot = None
+ self._battery_temperature = 0
+ self._is_connected = False
+ self.last_warn_bat_temp_time = rospy.get_time()
+
+ self._sub_spot = rospy.Subscriber(
+ '/spot/status/battery_states',
+ BatteryStateArray,
+ self._cb_spot)
+ self._sub_connected = rospy.Subscriber(
+ '/spot/status/cable_connected',
+ Bool,
+ self._cb_connected)
+
+ sound_client = SoundClient(
+ blocking=False,
+ sound_action='/robotsound_jp',
+ sound_topic='/robotsound_jp'
+ )
+
+ threshold_warning_battery_temperature =\
+ float(rospy.get_param('~threshold_warning_battery_temperature', 45))
+
+ threshold_warning_spot = float(
+ rospy.get_param('~threshold_warning_spot', 20))
+
+ threshold_return_spot = float(
+ rospy.get_param('~threshold_return_spot', 15))
+
+ threshold_estop_spot = float(
+ rospy.get_param('~threshold_estop_spot', 5))
+
+ notification_duration = float(
+ rospy.get_param('~notification_duration', 300))
+
+ rate = rospy.Rate(0.1)
+ last_notified = rospy.Time.now()
+ while not rospy.is_shutdown():
+
+ rate.sleep()
+
+ if not self._is_connected:
+
+ if (rospy.Time.now() - last_notified).to_sec() > notification_duration:
+ sound_client.say('バッテリー残量、{}、パーセントです。'.format(
+ int(self._battery_spot)), volume=0.3)
+ last_notified = rospy.Time.now()
+
+ if (self._battery_spot is not None and self._battery_spot < threshold_estop_spot):
+ rospy.logerr('Battery is low. Estop.')
+ sound_client.say('バッテリー残量が少ないため、動作を停止します')
+ rospy.ServiceProxy('/spot/estop/gentle', Trigger)(TriggerRequest())
+ rospy.ServiceProxy('/spot/estop/hard', Trigger)(TriggerRequest())
+
+ elif (self._battery_spot is not None and self._battery_spot < threshold_return_spot):
+ rospy.logerr('Battery is low. Returning to home.')
+ sound_client.say('バッテリー残量が少ないため、ドックに戻ります')
+ self._call_go_back_home()
+
+ elif (self._battery_spot is not None and self._battery_spot < threshold_warning_spot):
+ rospy.logwarn('Battery is low. Spot: {}'.format(self._battery_spot))
+ sound_client.say('バッテリー残量が少ないです。本体が、{}、パーセントです。'.format(
+ int(self._battery_spot)))
+
+ if self._battery_temperature > threshold_warning_battery_temperature\
+ and (rospy.get_time() - self.last_warn_bat_temp_time) > 180:
+ rospy.logerr('Battery temperature is high. Battery temp:{:.2f} > threshold:{}'
+ .format(self._battery_temperature, threshold_warning_battery_temperature))
+ sound_client.say('バッテリー温度が高いです。')
+ self.last_warn_bat_temp_time = rospy.get_time()
+
+ def _cb_spot(self, msg):
+
+ self._battery_spot = msg.battery_states[0].charge_percentage
+ self._battery_temperature = max(msg.battery_states[0].temperatures)
+
+ def _cb_connected(self, msg):
+
+ self._is_connected = msg.data
+
+ def _call_estop_gentle(self):
+
+ try:
+ trigger = rospy.ServiceProxy('/spot/estop/gentle', Trigger)
+ ret = trigger()
+ rospy.loginfo('Call %s and received %s(%s)'%(trigger.resolved_name, ret.sucess, ret.message))
+ except rospy.ServiceException as e:
+ rospy.logerr('Service call failed: %s'%e)
+
+ def _call_estop_hard(self):
+
+ try:
+ trigger = rospy.ServiceProxy('/spot/estop/hard', Trigger)
+ ret = trigger()
+ rospy.loginfo('Call %s and received %s(%s)'%(trigger.resolved_name, ret.sucess, ret.message))
+ except rospy.ServiceException as e:
+ rospy.logerr('Service call failed: %s'%e)
+
+ def _call_go_back_home(self):
+
+ try:
+ trigger = rospy.ServiceProxy('/spot/dock_fixed_id', Trigger)
+ ret = trigger()
+ rospy.loginfo('Call %s and received %s(%s)'%(trigger.resolved_name, ret.sucess, ret.message))
+ except rospy.ServiceException as e:
+ rospy.logerr('Service call failed: %s'%e)
+
+
+def main():
+
+ rospy.init_node('battery_notifier')
+ battery_notifier = SpotBatteryNotifier()
+ rospy.spin()
+
+
+if __name__ == '__main__':
+ main()
diff --git a/jsk_spot_robot/jsk_spot_startup/node_scripts/battery_visualizer.py b/jsk_spot_robot/jsk_spot_startup/node_scripts/battery_visualizer.py
new file mode 100755
index 0000000000..95be4670c5
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_startup/node_scripts/battery_visualizer.py
@@ -0,0 +1,33 @@
+#!/usr/bin/env python
+
+import rospy
+from spot_msgs.msg import BatteryStateArray
+from std_msgs.msg import Float32
+
+
+class SpotBatteryVisualizer(object):
+
+ def __init__(self):
+
+ rospy.init_node('spot_battery_visualizer')
+
+ self._sub = rospy.Subscriber(
+ '/spot/status/battery_states', BatteryStateArray, self._cb)
+ self._pub = rospy.Publisher(
+ '/spot/status/battery_percentage', Float32, queue_size=1)
+
+ def _cb(self, msg):
+
+ pub_msg = Float32()
+ pub_msg.data = msg.battery_states[0].charge_percentage
+ self._pub.publish(pub_msg)
+
+
+def main():
+
+ battery_visualizer = SpotBatteryVisualizer()
+ rospy.spin()
+
+
+if __name__ == '__main__':
+ main()
diff --git a/jsk_spot_robot/jsk_spot_startup/node_scripts/cable_connection_detector.py b/jsk_spot_robot/jsk_spot_startup/node_scripts/cable_connection_detector.py
new file mode 100755
index 0000000000..606c5abf36
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_startup/node_scripts/cable_connection_detector.py
@@ -0,0 +1,53 @@
+#!/usr/bin/env python
+
+import rospy
+import spot_msgs.msg
+import sensor_msgs.msg
+from std_msgs.msg import Bool
+
+
+class CalbeConnectionDetector:
+
+ def __init__(self):
+
+ self.pub = rospy.Publisher(
+ '/spot/status/cable_connected', Bool, queue_size=1)
+
+ self.msg_battery_spot = None
+ self.msg_battery_laptop = None
+
+ self.sub_battery_spot = rospy.Subscriber(
+ '/spot/status/power_state',
+ spot_msgs.msg.PowerState,
+ self.callback_battery_spot)
+
+ rate = rospy.Rate(1)
+ while not rospy.is_shutdown():
+ rate.sleep()
+ if self.msg_battery_spot == None and self.msg_battery_laptop == None:
+ continue
+ self.pub.publish(Bool(self.check_connection()))
+
+ def check_connection(self):
+
+ if self.msg_battery_spot is not None and\
+ self.msg_battery_spot.shore_power_state == spot_msgs.msg.PowerState.STATE_ON_SHORE_POWER:
+ return True
+ else:
+ return False
+
+ def callback_battery_spot(self, msg):
+
+ self.msg_battery_spot = msg
+
+
+
+def main():
+
+ rospy.init_node('cable_connection_detector')
+ node = CalbeConnectionDetector()
+ rospy.spin()
+
+
+if __name__ == '__main__':
+ main()
diff --git a/jsk_spot_robot/jsk_spot_startup/node_scripts/call_spot_dock_with_id.py b/jsk_spot_robot/jsk_spot_startup/node_scripts/call_spot_dock_with_id.py
new file mode 100755
index 0000000000..c21e1fec7e
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_startup/node_scripts/call_spot_dock_with_id.py
@@ -0,0 +1,31 @@
+#!/usr/bin/env python
+# -*- encoding: utf-8 -*-
+
+import rospy
+from std_srvs.srv import Trigger, TriggerResponse
+from spot_msgs.srv import Dock
+
+class SpotDockWithID(object):
+
+ def __init__(self):
+
+ self._dock_id = int(rospy.get_param('~dock_id', 1))
+
+ self._server = rospy.Service('/spot/dock_fixed_id', Trigger, self._cb)
+ self._client = rospy.ServiceProxy('/spot/dock', Dock)
+
+ def _cb(self, req):
+
+ resp = self._client(self._dock_id)
+
+ rospy.loginfo("Call /spot/dock(dock_id={}) returns {}".format(self._dock_id, resp))
+ return TriggerResponse(success=resp.success, message=resp.message)
+
+def main():
+ rospy.init_node('spot_dock_with_id')
+ end_effector_to_joy = SpotDockWithID()
+ rospy.spin()
+
+
+if __name__ == '__main__':
+ main()
diff --git a/jsk_spot_robot/jsk_spot_startup/node_scripts/end_effector_to_joy.py b/jsk_spot_robot/jsk_spot_startup/node_scripts/end_effector_to_joy.py
new file mode 100755
index 0000000000..e62715641d
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_startup/node_scripts/end_effector_to_joy.py
@@ -0,0 +1,86 @@
+#!/usr/bin/env python
+# -*- encoding: utf-8 -*-
+
+import rospy
+import tf2_ros
+from spot_msgs.msg import ManipulatorState
+from sensor_msgs.msg import Joy
+from std_srvs.srv import SetBool, SetBoolResponse
+
+# python3 does noth have cmp...
+def cmp(a, b):
+ return (a > b) - (a < b)
+
+class EndEffectorToJoy(object):
+
+ def __init__(self):
+ self._tf_buffer = tf2_ros.Buffer()
+ self._listener = tf2_ros.TransformListener(self._tf_buffer)
+ self._pub = rospy.Publisher(
+ '/joy_head/joy_raw',
+ Joy)
+ self._sub = None
+ self._enabled = rospy.Service('~set_enabled', SetBool, self._set_enabled)
+
+ self._deadzone_x = float(rospy.get_param('~deadzone_x', 0.01))
+ self._deadzone_y = float(rospy.get_param('~deadzone_y', 0.01))
+ self._maxrange_y = float(rospy.get_param('~maxrange_x', 0.2))
+ self._maxrange_x = float(rospy.get_param('~maxrange_y', 0.2))
+ self._offset_x = float(rospy.get_param('~offset_x', 0.0))
+ self._offset_y = float(rospy.get_param('~offset_y', 0.0))
+
+ def _set_enabled(self, req):
+ if req.data:
+ self._center_x = float(rospy.get_param('~center_x', 0.576))
+ self._center_y = float(rospy.get_param('~center_0', 0))
+ rospy.logwarn("Enabled end_effector_to_joy with center ({}, {})".format(self._center_x, self._center_y))
+ self._sub = rospy.Subscriber('/spot/status/manipulator_state', ManipulatorState, self._cb)
+ else:
+ rospy.logwarn("Disabled end_effector_to_joy with center")
+ if self._sub:
+ self._sub.unregister()
+ self._sub = None
+ return SetBoolResponse(True, 'Success')
+
+ def _cb(self, msg):
+ joy = Joy()
+ joy.header.frame_id = rospy.get_name()
+ joy.header.stamp = rospy.Time.now()
+ x = msg.estimated_end_effector_force_in_hand.x
+ y = msg.estimated_end_effector_force_in_hand.y
+ z = msg.estimated_end_effector_force_in_hand.z
+ try:
+ trans = self._tf_buffer.lookup_transform('body', 'hand', rospy.Time(0))
+ except (tf2_ros.LookupException, tf2_ros.ConnectivityException, tf2_ros.ExtrapolationException) as e:
+ rospy.logerr(e)
+ return None
+ x = trans.transform.translation.x - self._center_x
+ y = trans.transform.translation.y - self._center_y
+ rospy.loginfo_throttle(10, "end_effector_froce_in_hand = ({:4.1f}, {:4.1f}, {:4.1f}), stow_state = {}".format(x, y, z, msg.stow_state))
+ if msg.stow_state == ManipulatorState.STOWSTATE_STOWED:
+ x = 0
+ y = 0
+ else:
+ sign_x = cmp(x, 0)
+ sign_y = cmp(y, 0)
+ x = abs(x) + self._offset_x
+ y = abs(y) + self._offset_y
+ if x > self._maxrange_x: x = self._maxrange_x
+ if y > self._maxrange_y: y = self._maxrange_y
+ x = 0 if x < self._deadzone_x else x - self._deadzone_x
+ y = 0 if y < self._deadzone_y else y - self._deadzone_y
+ x = sign_x * x / (self._maxrange_x - self._deadzone_x)
+ y = sign_y * y / (self._maxrange_y - self._deadzone_y)
+ joy.axes = [x, y, 0, 0, 0, 0]
+ rospy.loginfo_throttle(10, " ({:4.1f}, {:4.1f}, {:4.1f})".format(x, y, 0))
+ joy.buttons = [0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0] # dummy button data
+ self._pub.publish(joy)
+
+def main():
+ rospy.init_node('end_effector_to_joy')
+ end_effector_to_joy = EndEffectorToJoy()
+ rospy.spin()
+
+
+if __name__ == '__main__':
+ main()
diff --git a/jsk_spot_robot/jsk_spot_startup/node_scripts/laptop_battery_visualizer.py b/jsk_spot_robot/jsk_spot_startup/node_scripts/laptop_battery_visualizer.py
new file mode 100755
index 0000000000..2969614532
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_startup/node_scripts/laptop_battery_visualizer.py
@@ -0,0 +1,32 @@
+#!/usr/bin/env python
+
+import rospy
+from sensor_msgs.msg import BatteryState
+from std_msgs.msg import Float32
+
+
+class LaptopBatteryVisualizer(object):
+
+ def __init__(self):
+
+ rospy.init_node('spot_battery_visualizer')
+
+ self._sub = rospy.Subscriber('/laptop_charge', BatteryState, self._cb)
+ self._pub = rospy.Publisher(
+ '/spot/status/laptop_battery_percentage', Float32, queue_size=1)
+
+ def _cb(self, msg):
+
+ pub_msg = Float32()
+ pub_msg.data = msg.percentage
+ self._pub.publish(pub_msg)
+
+
+def main():
+
+ battery_visualizer = LaptopBatteryVisualizer()
+ rospy.spin()
+
+
+if __name__ == '__main__':
+ main()
diff --git a/jsk_spot_robot/jsk_spot_startup/node_scripts/sample_pick_object_in_image.l b/jsk_spot_robot/jsk_spot_startup/node_scripts/sample_pick_object_in_image.l
new file mode 100755
index 0000000000..9aec1452cf
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_startup/node_scripts/sample_pick_object_in_image.l
@@ -0,0 +1,58 @@
+#!/usr/bin/env roseus
+
+(ros::load-ros-manifest "roseus")
+(ros::load-ros-manifest "geometry_msgs")
+(ros::load-ros-manifest "spot_msgs")
+
+(ros::roseus "sample_pick_object_in_image")
+(setq *c* (instance ros::simple-action-client :init
+ "/spot/pick_object_in_image" spot_msgs::PickObjectInImageAction))
+(send *c* :wait-for-server)
+
+;; call-trigger-service reqrueis roseus>1.7.5
+;; https://github.com/jsk-ros-pkg/jsk_roseus/pull/705
+;;
+(defun ros::call-trigger-service (srvname &key (wait nil) (timeout -1) (persistent nil))
+ "Call std_srv/Trigger service. Use (setq r (call-trigger-service \"/test\" t)) (and r (send r :success)) to check if it succeed. If r is nil, it fail to find service."
+ (let (r)
+ (when (ros::wait-for-service srvname (if wait timeout 0))
+ (setq r (ros::service-call srvname (instance std_srvs::TriggerRequest :init) persistent))
+ (ros::ros-debug "Call \"~A\" returns \"~A\"" srvname (send r :message))
+ (unless (send r :success) (ros::ros-warn "Call \"~A\" fails, it returns \"~A\"" srvname (send r :message)))
+ r)))
+
+(ros::subscribe "screenpoint" geometry_msgs::PointStamped
+ #'(lambda (msg)
+ (let ((goal (instance spot_msgs::PickObjectInImageActionGoal :init)))
+ (send goal :goal :image_source (ros::get-param "~image_source")) ;; required ex) "hand_color_image"
+ (send goal :goal :center (instance geometry_msgs::Point :init :x (send msg :point :x) :y (send msg :point :y)))
+ (send goal :goal :max_duration (instance ros::duration :init 15))
+ (send *c* :send-goal goal))))
+
+(do-until-key
+ (ros::rate 3)
+ (while (memq (send (send (*c* . ros::comm-state) :latest-goal-status) :status) ;; bugs in actionlib.l??
+ (list actionlib_msgs::GoalStatus::*pending*
+ actionlib_msgs::GoalStatus::*preempted*
+ actionlib_msgs::GoalStatus::*succeeded*
+ actionlib_msgs::GoalStatus::*aborted*))
+ (ros::ros-warn "waiting to select target object in image_view ...")
+ (ros::sleep)
+ (ros::spin-once))
+ (ros::ros-warn ";; wait-for-result")
+ (send *c* :wait-for-result)
+ (if (send (send *c* :get-result) :success)
+ ;; if robot grab object, unstow then open gripper
+ (progn
+ (ros::call-trigger-service "/spot/unstow_arm")
+ (ros::call-trigger-service "/spot/gripper_open"))
+ (progn
+ ;; if robot failed to grab object, just open gripper
+ (ros::call-trigger-service "/spot/gripper_open")))
+ (ros::call-trigger-service "/spot/stow_arm")
+ )
+
+
+
+
+
diff --git a/jsk_spot_robot/jsk_spot_startup/node_scripts/start-spot.l b/jsk_spot_robot/jsk_spot_startup/node_scripts/start-spot.l
new file mode 100755
index 0000000000..204ccfaef5
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_startup/node_scripts/start-spot.l
@@ -0,0 +1,23 @@
+#!/usr/bin/env roseus
+
+(load "package://spoteus/spot-interface.l")
+(unless (boundp '*spot*) (spot) (send *spot* :reset-pose))
+(unless (ros::ok) (ros::roseus "spot_eus_interface"))
+(unless (boundp '*ri*) (setq *ri* (instance spot-interface :init)))
+(send *ri* :claim)
+
+(setq ip "unknown")
+(setq host (unix::gethostbyname "spotcore.jsk.imi.i.u-tokyo.ac.jp"))
+(if (listp host)
+ (setq ip (format nil "~A . ~A . ~A . ~A" (elt (car host) 0) (elt (car host) 1) (elt (car host) 2) (elt (car host) 3))))
+
+(setq info-txt (format nil "Hello, my name is ~A, my internet address is ~A, my owner is ~A and my dock id is ~A"
+ (ros::get-param "/robot/name")
+ ip
+ (unix::getenv "USER")
+ (round (ros::get-param "/spot/spot_ros/dock_id"))))
+(ros::ros-info info-txt)
+(send *ri* :speak info-txt :wait t)
+
+
+(ros::exit)
diff --git a/jsk_spot_robot/jsk_spot_startup/node_scripts/static_tf_republisher.py b/jsk_spot_robot/jsk_spot_startup/node_scripts/static_tf_republisher.py
new file mode 100755
index 0000000000..ff5363d6c0
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_startup/node_scripts/static_tf_republisher.py
@@ -0,0 +1,42 @@
+#!/usr/bin/env python
+
+import sys
+import argparse
+
+import rospy
+import rosbag
+import tf2_ros
+
+from geometry_msgs.msg import TransformStamped
+from tf2_msgs.msg import TFMessage
+
+
+def main():
+
+ rospy.init_node('static_tf_republisher')
+
+ topicname = '/tf_static'
+
+ myargv = rospy.myargv(argv=sys.argv)
+ if len(myargv) > 1:
+ bagfilename = myargv[1]
+ else:
+ bagfilename = rospy.get_param("~file")
+
+ broadcaster = tf2_ros.StaticTransformBroadcaster()
+
+ list_messages = []
+ transforms = []
+ with rosbag.Bag(bagfilename, 'r') as inputbag:
+ for topic, msg, t in inputbag.read_messages('/tf_static'):
+ transforms.extend(msg.transforms)
+
+ rospy.loginfo(
+ 'republish /tf_static with {} TransformStamped messages'.format(len(transforms)))
+
+ broadcaster.sendTransform(transforms)
+ rospy.spin()
+
+
+if __name__ == '__main__':
+ main()
diff --git a/jsk_spot_robot/jsk_spot_startup/package.xml b/jsk_spot_robot/jsk_spot_startup/package.xml
new file mode 100644
index 0000000000..c72d0da068
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_startup/package.xml
@@ -0,0 +1,60 @@
+
+
+ jsk_spot_startup
+ 1.1.0
+ The jsk_spot_startup package
+
+ Kei Okada
+ Koki Shinjo
+ Koki Shinjo
+
+ BSD
+
+ catkin
+
+ roslaunch
+ roslint
+
+ app_manager
+ app_scheduler
+ aques_talk
+ audio_capture
+ cmd_vel_smoother
+ compressed_image_transport
+ coral_usb
+ image_transport
+ interactive_marker_twist_server
+ jsk_perception
+ jsk_robot_startup
+ jsk_tools
+ julius_ros
+ laptop_battery_monitor
+ robot_state_publisher
+ ros_speech_recognition
+ rosbag
+ roseus
+ roseus_smach
+ roslaunch
+ rosserial_python
+ rviz
+ rwt_app_chooser
+ sound_play
+ spot_description
+ spot_driver
+ spoteus
+ topic_tools
+ twist_mux
+ voice_text
+ xacro
+ xterm
+
+ jsk_spot_behavior_manager
+ spot_basic_behaviors
+ esp_now_ros
+
+ rostest
+
+
+
+
+
diff --git a/jsk_spot_robot/jsk_spot_startup/scripts/deploy-scripts-and-services.sh b/jsk_spot_robot/jsk_spot_startup/scripts/deploy-scripts-and-services.sh
new file mode 100755
index 0000000000..0d702f4cac
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_startup/scripts/deploy-scripts-and-services.sh
@@ -0,0 +1,15 @@
+#!/bin/bash
+
+PACKAGE_PATH=$(rospack find jsk_spot_startup)
+SERVICE_SOURCE_PATH=$PACKAGE_PATH/services
+SERVICE_DESTINATION_PATH=/etc/systemd/system
+
+# install systemd unit files
+cd $SERVICE_SOURCE_PATH
+for service_file in $(ls ./*);
+do
+ sudo cp $service_file $SERVICE_DESTINATION_PATH/$service_file
+ sudo chmod 644 $SERVICE_DESTINATION_PATH/$service_file
+ sudo chown root:root $SERVICE_DESTINATION_PATH/$service_file
+done
+sudo systemctl daemon-reload
diff --git a/jsk_spot_robot/jsk_spot_startup/scripts/install_udev_rules.sh b/jsk_spot_robot/jsk_spot_startup/scripts/install_udev_rules.sh
new file mode 100755
index 0000000000..bab4be1279
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_startup/scripts/install_udev_rules.sh
@@ -0,0 +1,4 @@
+#!/bin/bash
+
+sudo cp $(rospack find jsk_spot_startup)/udev_rules/* /etc/udev/rules.d/
+sudo udevadm control --reload-rules
diff --git a/jsk_spot_robot/jsk_spot_startup/scripts/update-network-connection.sh b/jsk_spot_robot/jsk_spot_startup/scripts/update-network-connection.sh
new file mode 100755
index 0000000000..c5edb7f505
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_startup/scripts/update-network-connection.sh
@@ -0,0 +1,157 @@
+#!/bin/bash
+
+IF_ETH=enxa0cec875af37
+IF_WIFI=wlxc006c31b1a80
+IF_LTE=enxf8b7975c750a
+WIFI_PROFILE=sanshiro
+CURRENT_CONNECTION=
+
+function existIF() {
+ interface_name=$1
+ for DEV in `find /sys/devices -name net | grep -v virtual`
+ do
+ if [ `ls $DEV/` = $interface_name ]; then
+ echo 0
+ return 0
+ fi
+ done
+ echo 1
+ return 1
+}
+
+function restartWIFI() {
+ sudo nmcli connection down $WIFI_PROFILE
+ #sudo ip l set $IF_WIFI down
+ #sudo ip l set $IF_WIFI up
+ sudo nmcli connection up $WIFI_PROFILE
+}
+
+function updateRouteToETH() {
+ sudo ifmetric $IF_ETH 100
+ sudo ifmetric $IF_WIFI 101
+ sudo ifmetric $IF_LTE 101
+}
+
+function updateRouteToWIFI() {
+ sudo ifmetric $IF_WIFI 100
+ sudo ifmetric $IF_ETH 102
+ sudo ifmetric $IF_LTE 101
+}
+
+function updateRouteToLTE() {
+ sudo ifmetric $IF_LTE 100
+ sudo ifmetric $IF_WIFI 101
+ sudo ifmetric $IF_ETH 102
+}
+
+# get default route interface name which has most priority
+function get_default_route() {
+ ip route | grep default | awk '{print $5}' | head -n 1
+}
+
+function updateConnectionToETH() {
+ if [ $(existIF $IF_ETH) = 0 ]; then
+ ping -c 1 -W 1 1.1.1.1 -I $IF_ETH > /dev/null 2>&1
+ if [ $? = 0 ]; then
+ echo "Ethernet is online. switched to ethernet."
+ CURRENT_CONNECTION=$IF_ETH
+ updateRouteToETH
+ else
+ echo "Ethernet is offline.: $?"
+ fi
+ else
+ echo "No ethernet device is found."
+ fi
+}
+
+function updateConnectionToWiFi() {
+ if [ $(existIF $IF_WIFI) = 0 ]; then
+ ping -c 1 -W 1 1.1.1.1 -I $IF_WIFI > /dev/null 2>&1
+ if [ $? = 0 ]; then
+ echo "Wifi is online. switched to wifi."
+ CURRENT_CONNECTION=$IF_WIFI
+ updateRouteToWIFI
+ else
+ echo "Wifi is offline.: $?"
+ fi
+ else
+ echo "No wifi device is found."
+ fi
+}
+
+function updateConnectionToLTE() {
+ if [ $(existIF $IF_LTE) = 0 ]; then
+ echo "Connection type switched to lte"
+ CURRENT_CONNECTION=$IF_LTE
+ updateRouteToLTE
+ else
+ echo "No lte device is found"
+ fi
+
+ echo "No network device found."
+}
+
+function updateConnection() {
+ echo "Connection updating."
+
+ # Check default route is current connection
+ default_route=$(get_default_route)
+ if [ $default_route = $CURRENT_CONNECTION ]; then
+ echo "Current connection $CURRENT_CONNECTION is default route. No need to update."
+ else
+ echo "Current connection $CURRENT_CONNECTION is not default route. Trying to update."
+ if [ $CURRENT_CONNECTION = $IF_ETH ]; then
+ updateConnectionToETH
+ elif [ $CURRENT_CONNECTION = $IF_WIFI ]; then
+ updateConnectionToWiFi
+ elif [ $CURRENT_CONNECTION = $IF_LTE ]; then
+ updateConnectionToLTE
+ else
+ echo "Unknown current connection: $CURRENT_CONNECTION"
+ fi
+ fi
+
+ # Reconnect WIFI
+ if [ $(existIF $IF_WIFI) = 0 ]; then
+ ping -c 1 -W 1 1.1.1.1 -I $IF_WIFI > /dev/null 2>&1
+ if [ $? = 0 ]; then
+ if [ $CURRENT_CONNECTION = $IF_WIFI ]; then
+ echo "wifi connected"
+ else
+ echo "wifi connected. But current connection $CURRENT_CONNECTION is not wifi $IF_WIFI. So update"
+ updateConnectionToWiFi
+ fi
+ else
+ echo "wifi not connected. trying to connect $WIFI_PROFILE"
+ restartWIFI
+ updateConnectionToWiFi
+ fi
+ else
+ echo "wifi device not found. skipped wifi reconnection."
+ fi
+
+ # Check internet connection
+ ping -c 1 -W 1 1.1.1.1 > /dev/null 2>&1
+ if [ $? = 0 ]; then
+ echo "Network connected"
+ return 0
+ else
+ echo "Network disconnected. Trying to reconnect."
+ fi
+
+ # First, try ethernet to connect with Ethernet if available
+ updateConnectionToETH
+
+ # Second, try wifi to connect with Wi-Fi if available
+ updateConnectionToWiFi
+
+ # connect with LTE if available
+ updateConnectionToLTE
+}
+
+CURRENT_CONNECTION=$IF_ETH
+while :
+do
+ sleep 5
+ updateConnection
+done
diff --git a/jsk_spot_robot/jsk_spot_startup/services/jsk-spot-utils-network.service b/jsk_spot_robot/jsk_spot_startup/services/jsk-spot-utils-network.service
new file mode 100644
index 0000000000..8137664641
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_startup/services/jsk-spot-utils-network.service
@@ -0,0 +1,12 @@
+[Unit]
+Description=JSK Network Service
+
+[Service]
+Type=simple
+ExecStart=/bin/bash -c ". /opt/ros/melodic/setup.bash && . /home/sktometometo/ros/ws_main_extend/devel/setup.bash && rosrun jsk_spot_startup update-network-connection.sh"
+ExecStop=/bin/kill -WINCH ${MAINPID}
+KillMode=control-group
+KillSignal=SIGTERM
+
+[Install]
+WantedBy=multi-user.target
diff --git a/jsk_spot_robot/jsk_spot_startup/udev_rules/75-spot-m5stack.rules b/jsk_spot_robot/jsk_spot_startup/udev_rules/75-spot-m5stack.rules
new file mode 100644
index 0000000000..1c5a8c97f6
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_startup/udev_rules/75-spot-m5stack.rules
@@ -0,0 +1,3 @@
+SUBSYSTEM=="tty", ATTRS{idVendor}=="1a86", ATTRS{idProduct}=="55d4", SYMLINK+="elevator_device", GROUP="dialout"
+SUBSYSTEM=="tty", ATTRS{idVendor}=="303a", ATTRS{idProduct}=="1001", SYMLINK+="esp_now_ros_interface", GROUP="dialout"
+
diff --git a/jsk_spot_robot/jsk_spot_startup/udev_rules/89-spot-eye-devices.rules b/jsk_spot_robot/jsk_spot_startup/udev_rules/89-spot-eye-devices.rules
new file mode 100644
index 0000000000..fd1615fc24
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_startup/udev_rules/89-spot-eye-devices.rules
@@ -0,0 +1,4 @@
+# M5Stamp
+SUBSYSTEM=="tty", ATTRS{idVendor}=="1a86", ATTRS{idProduct}=="55d4", ATTRS{serial}=="5319011411", SYMLINK+="eye_left", GROUP="dialout"
+SUBSYSTEM=="tty", ATTRS{idVendor}=="1a86", ATTRS{idProduct}=="55d4", ATTRS{serial}=="537A013618", SYMLINK+="eye_right", GROUP="dialout"
+
diff --git a/jsk_spot_robot/jsk_spot_user.rosinstall b/jsk_spot_robot/jsk_spot_user.rosinstall
new file mode 100644
index 0000000000..1fb7336910
--- /dev/null
+++ b/jsk_spot_robot/jsk_spot_user.rosinstall
@@ -0,0 +1,16 @@
+# spot-ros is required for spot
+## use https://github.com/cst0/spot_ros/pull/4 for Arm and gripper
+- git:
+ local-name: spot-ros
+ uri: https://github.com/k-okada/spot_ros-arm.git
+ version: arm
+## to support custom limb name, we need https://github.com/jsk-ros-pkg/jsk_model_tools/pull/249
+- git:
+ local-name: jsk_model_tools
+ uri: https://github.com/k-okada/jsk_model_tools.git
+ version: custom_limb
+# wait for https://github.com/jsk-ros-pkg/jsk_pr2eus/pull/443 (add volume key arg for robot-interface :speak) to be released
+- git:
+ local-name: jsk_pr2eus
+ uri: https://github.com/jsk-ros-pkg/jsk_pr2eus.git
+ version: master
diff --git a/jsk_spot_robot/requirements.txt b/jsk_spot_robot/requirements.txt
new file mode 100644
index 0000000000..6306e82a90
--- /dev/null
+++ b/jsk_spot_robot/requirements.txt
@@ -0,0 +1,6 @@
+protobuf == 3.19.4 # protobuf > 3.20 requres Python3.7 (https://github.com/protocolbuffers/protobuf/pull/9480)
+bosdyn-client == 3.2.0
+bosdyn-mission == 3.2.0
+bosdyn-api == 3.2.0
+bosdyn-core == 3.2.0
+bosdyn-choreography-client == 3.2.0
diff --git a/jsk_spot_robot/spot_autowalk_data/CMakeLists.txt b/jsk_spot_robot/spot_autowalk_data/CMakeLists.txt
new file mode 100644
index 0000000000..7dea41d2c2
--- /dev/null
+++ b/jsk_spot_robot/spot_autowalk_data/CMakeLists.txt
@@ -0,0 +1,24 @@
+cmake_minimum_required(VERSION 2.8.3)
+project(spot_autowalk_data)
+
+find_package(catkin REQUIRED COMPONENTS
+ catkin_virtualenv
+)
+
+catkin_generate_virtualenv(
+ PYTHON_INTERPRETER python3
+ USE_SYSTEM_PACKAGES FALSE
+ CHECK_VENV FALSE
+)
+
+add_custom_target(${PROJECT_NAME}_download_autowalk_data ALL COMMAND python$ENV{ROS_PYTHON_VERSION} ${PROJECT_SOURCE_DIR}/scripts/download_autowalk_data.py)
+
+catkin_package()
+
+install(DIRECTORY autowalk
+ DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION}
+)
+
+catkin_install_python(PROGRAMS scripts/view_map.py
+ DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
+)
diff --git a/jsk_spot_robot/spot_autowalk_data/README.md b/jsk_spot_robot/spot_autowalk_data/README.md
new file mode 100644
index 0000000000..31552a9930
--- /dev/null
+++ b/jsk_spot_robot/spot_autowalk_data/README.md
@@ -0,0 +1,116 @@
+# spot_autowalk_data
+
+This package includes autowalk data downloaded from public Googledrive folder with jsk_data.
+
+## scripts
+
+### download_autowalk_data.py
+
+this scripts download autowalk data from google drive. this script will be run when catkin build.
+
+### view_map.py
+
+this script visualize autowalk data and each waypoint id
+
+#### Usage
+
+when you want to visualize autowalk data without waypoint id, just run
+
+```
+rosrun spot_autowalk_data view_map.py
+```
+
+when you want to visualize autowalk data with waypoint id, run the script with `--draw-id` option
+
+```
+rosrun spot_autowalk_data view_map.py --draw-id
+```
+
+## autowalk data in this packages
+
+### eng2_2FElevator_to_2FEntrance.walk
+
+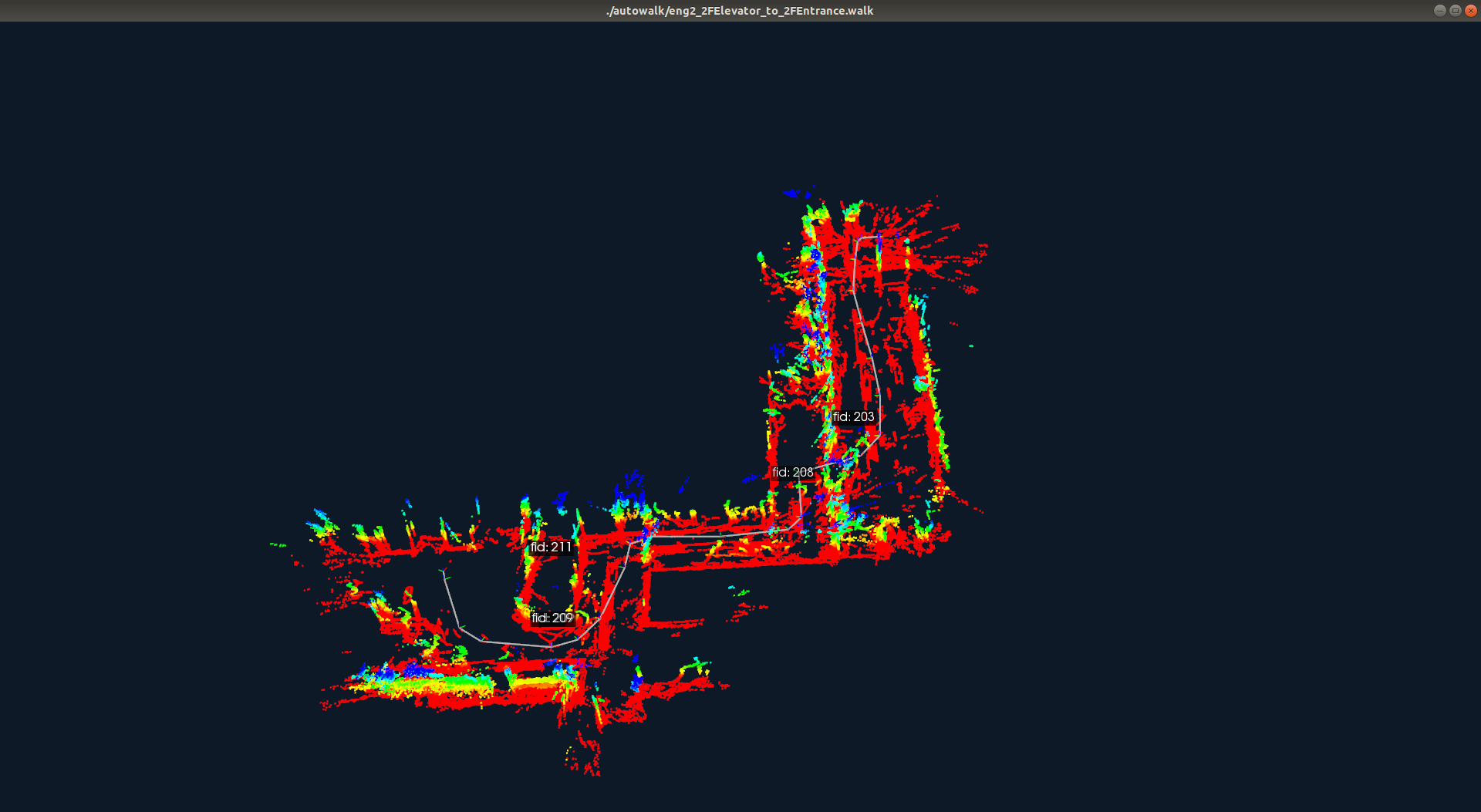
+
+### eng2_2FElevator_to_MainGate
+
+
+
+### eng2_2Felevator_to_eng8_2FElevator
+
+
+
+### eng2_73B2_to_2FElevator
+
+
+
+### eng2_73B2_to_81C1
+
+
+
+### eng2_elevator_7FElevator_to_2FElevator
+
+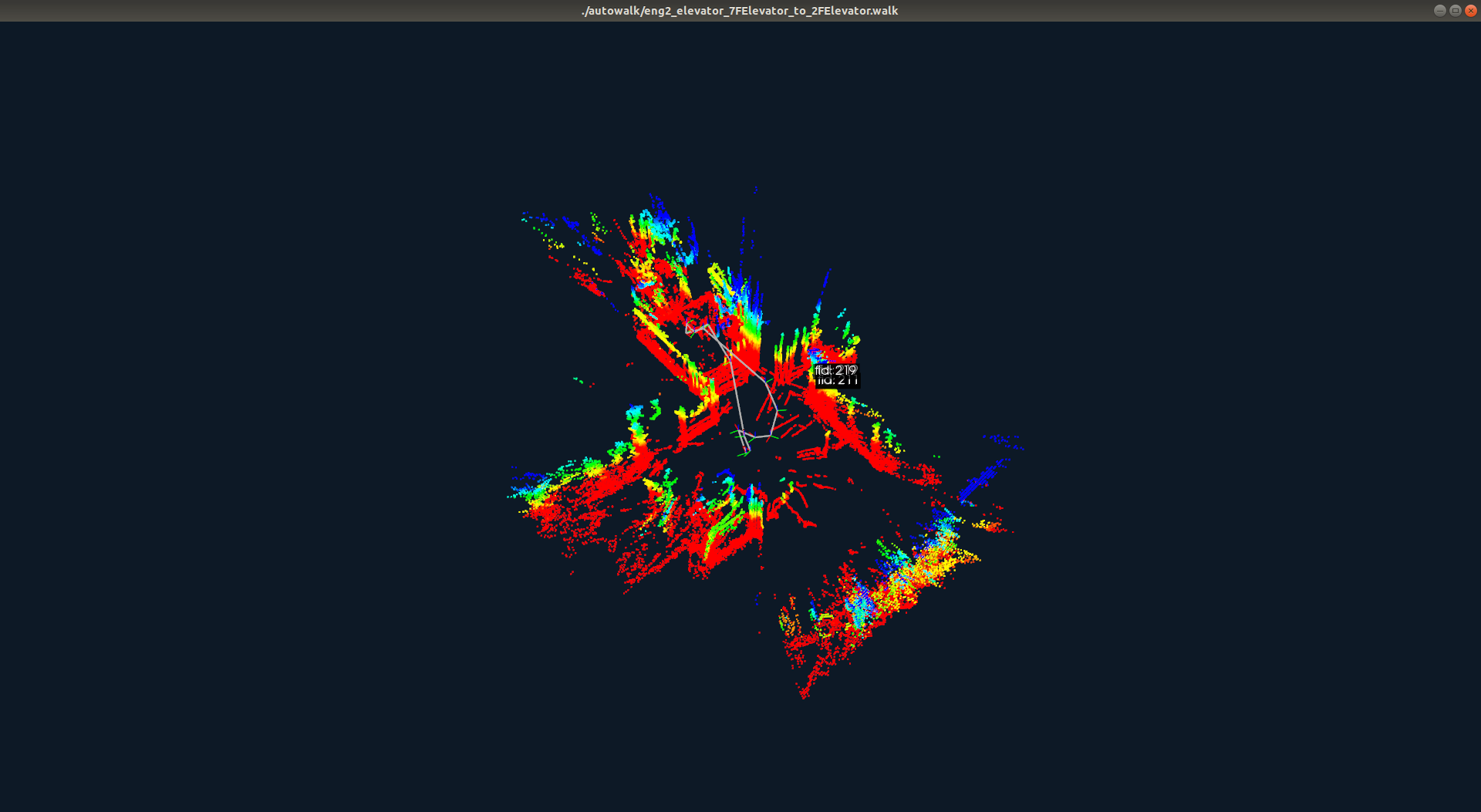
+
+### eng_TelephoneBox_to_HongoMainGate
+
+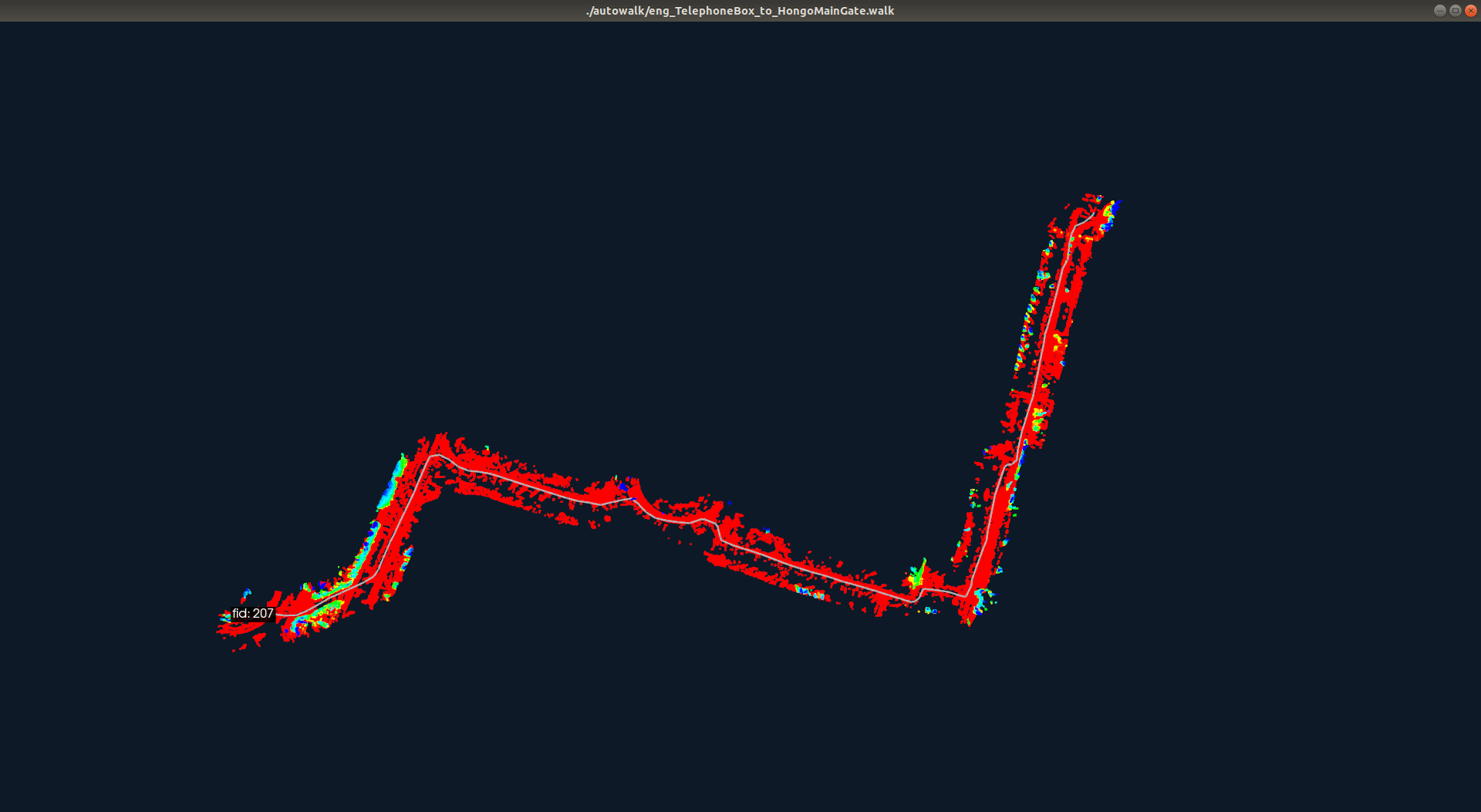
+
+### eng2_elevator_3FElevator_to_2FElevator.walk
+
+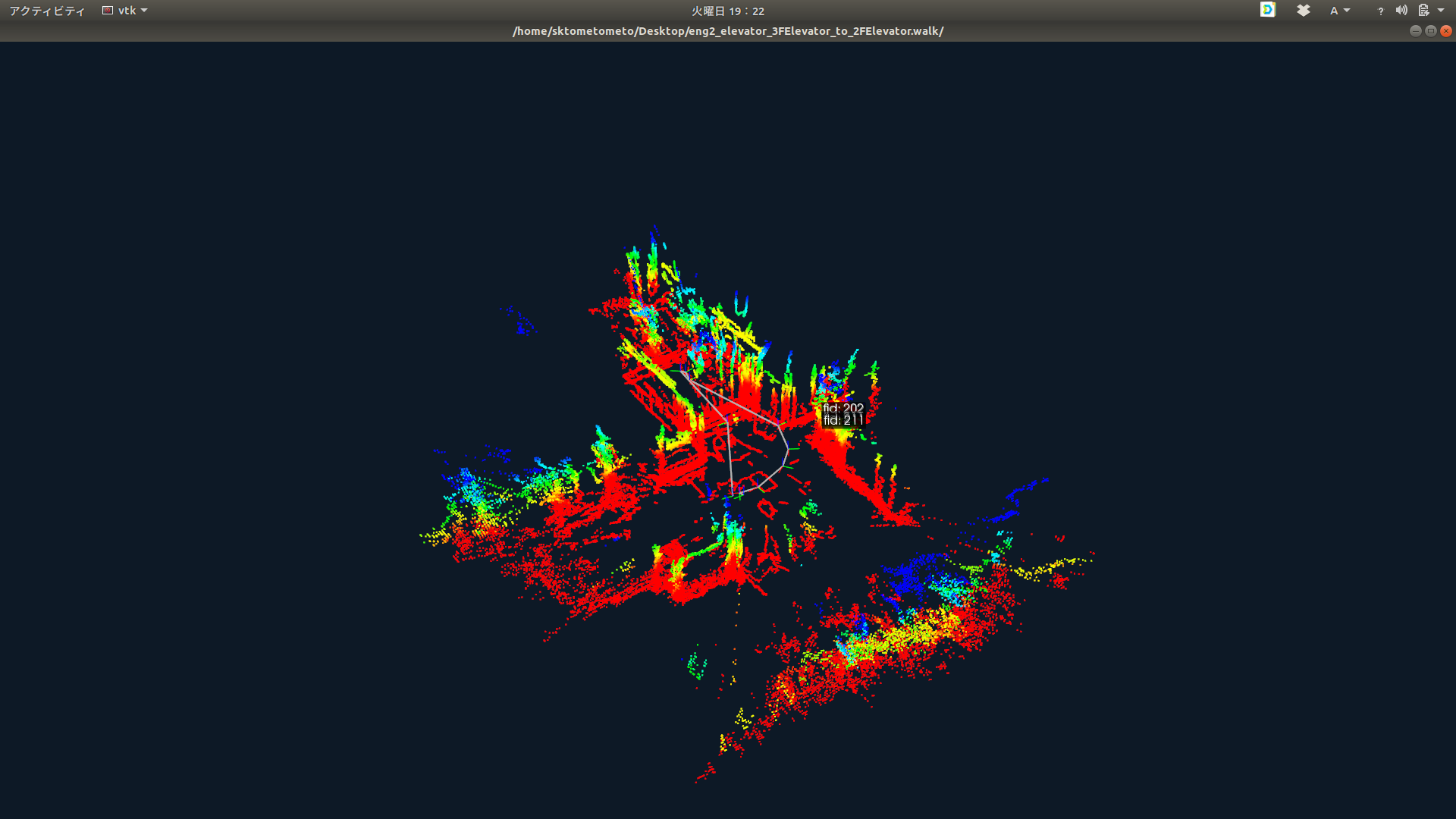
+
+### eng2_3FElevator_to_Mech_Office.walk
+
+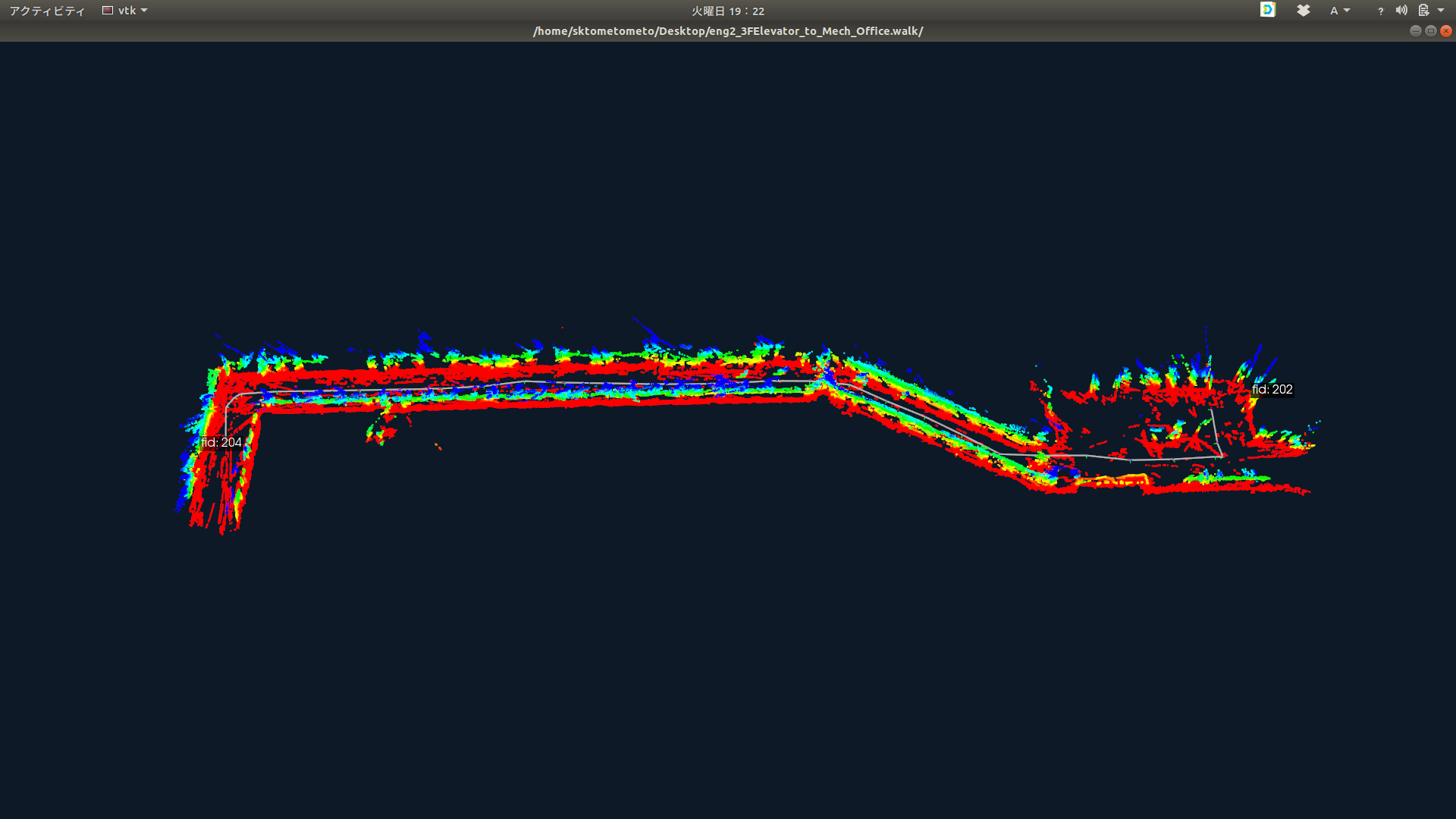
+
+### eng2_2FElevator_to_MainEntrance.walk
+
+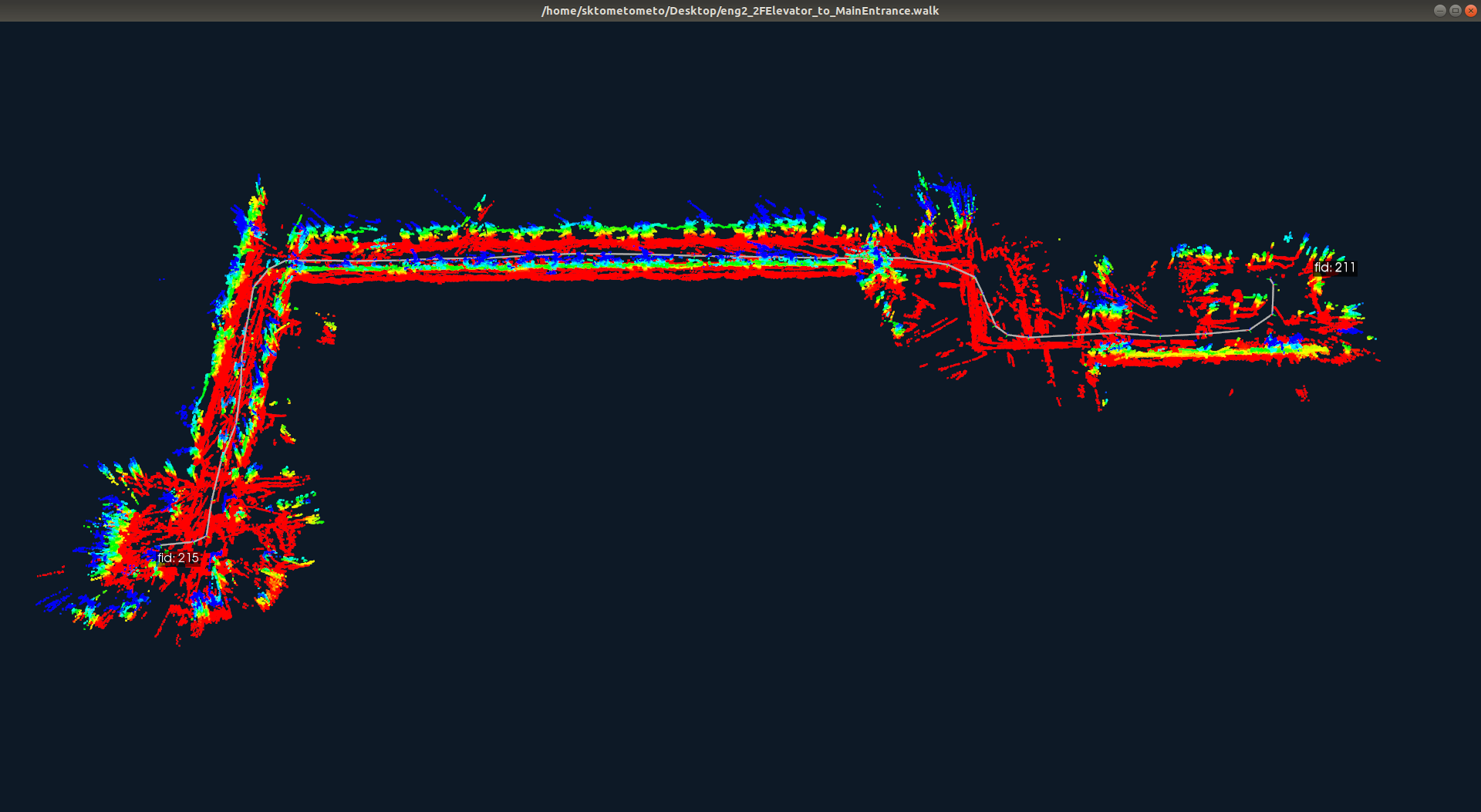
+
+### eng2_MainEntrance_to_HongoMainGate.walk
+
+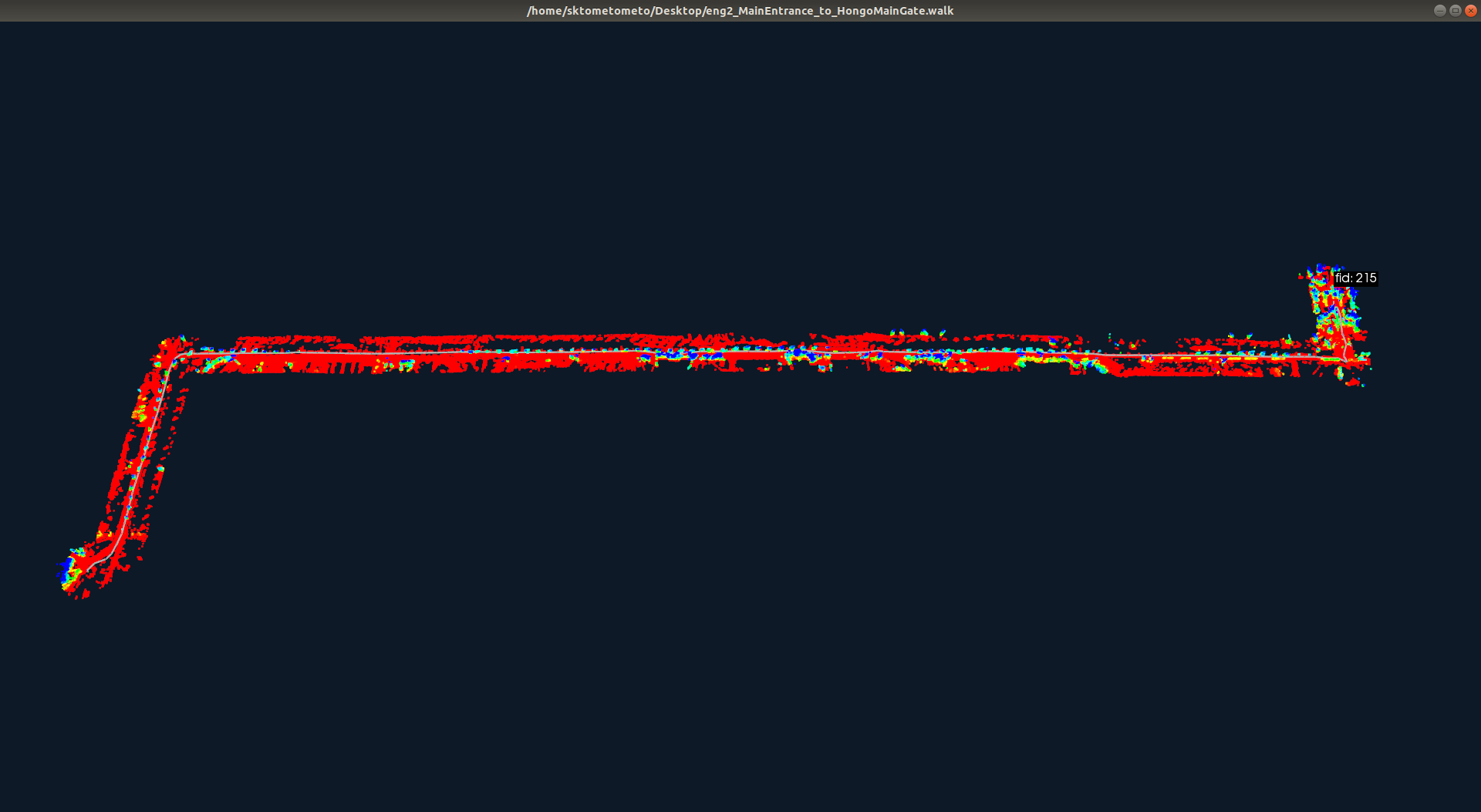
+
+### eng2_MainEntrance_to_HongoMainGate_Daylight.walk
+
+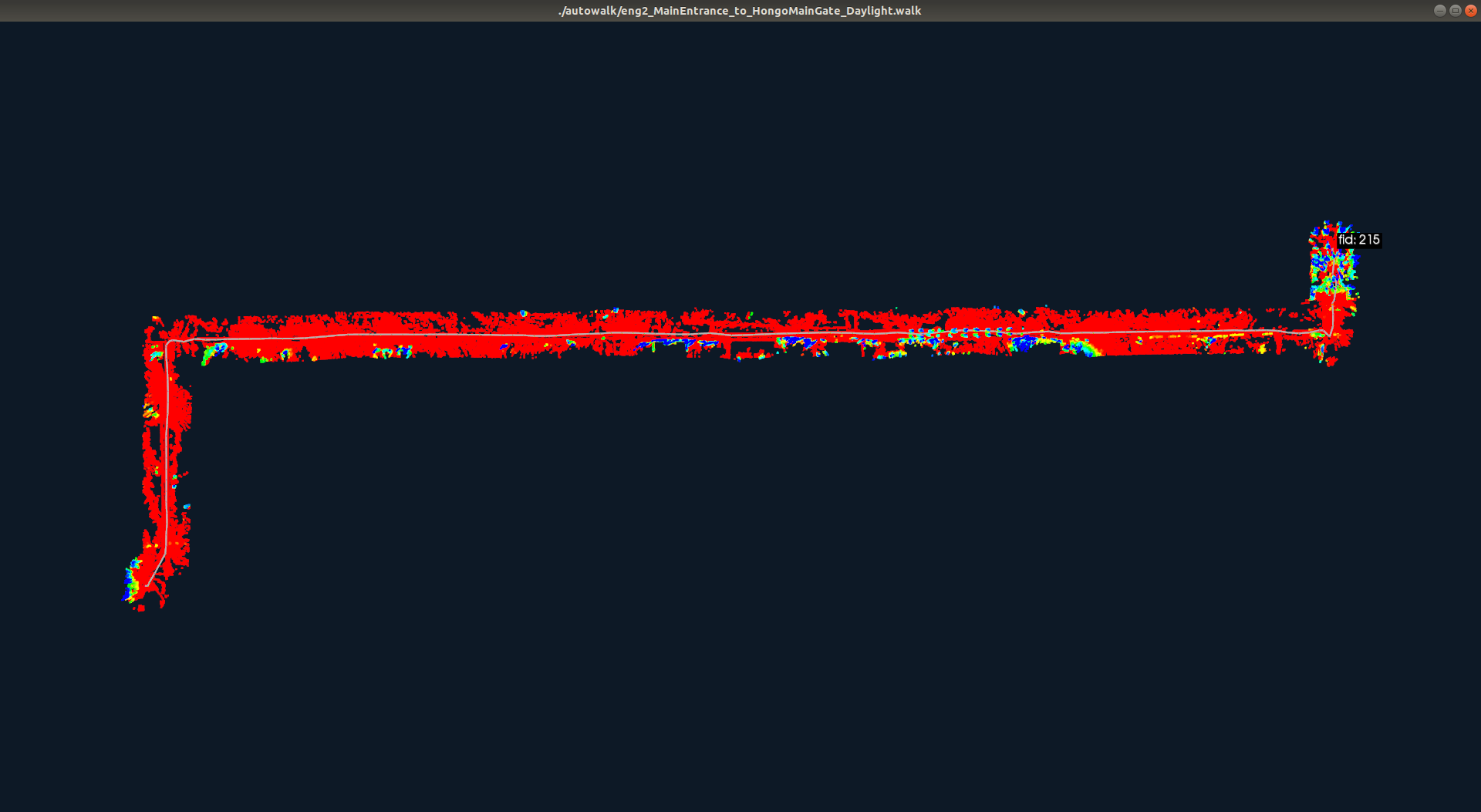
+
+### eng2_2FElevator_to_subway.walk
+
+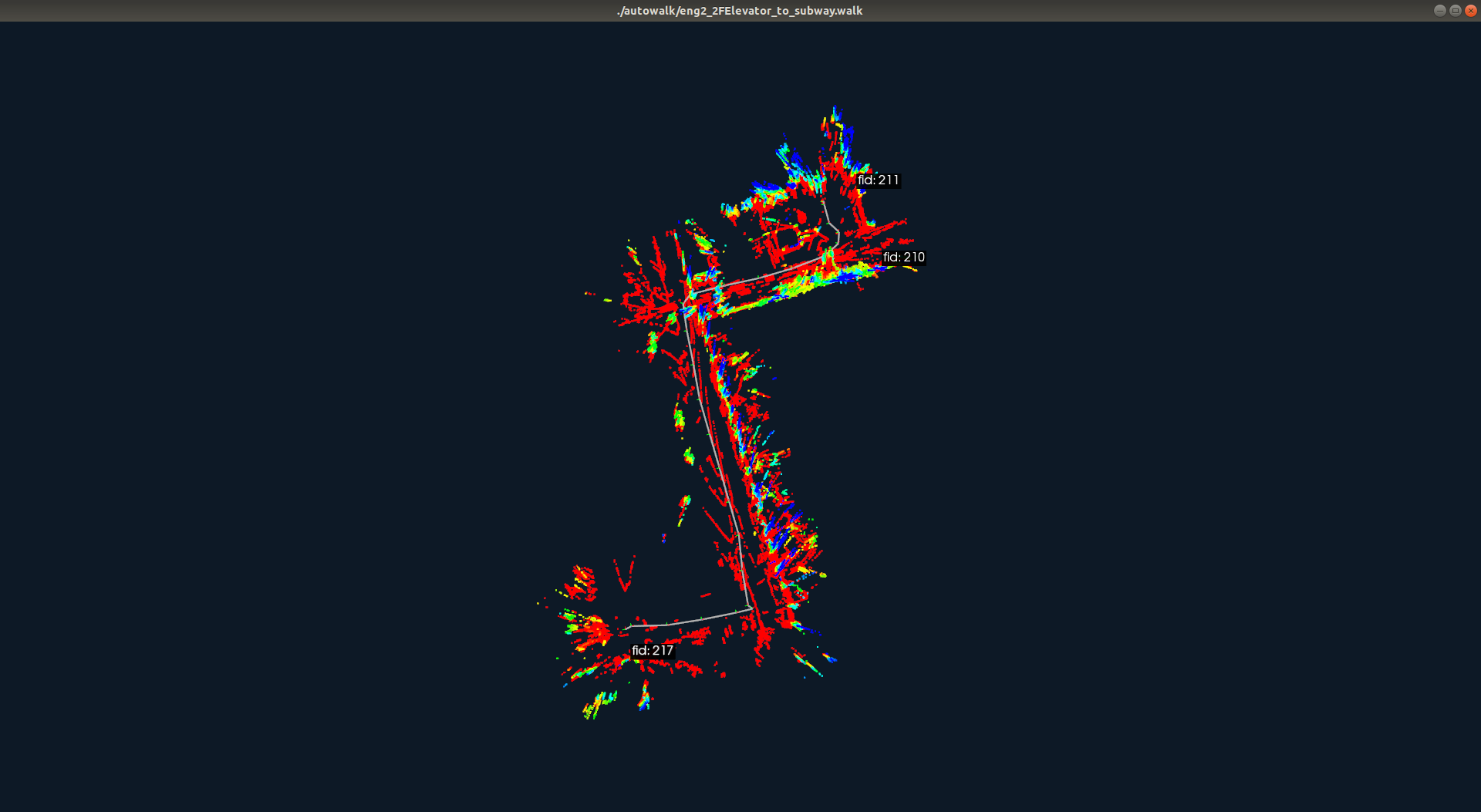
+
+### eng2_subway_tablenavigation.walk
+
+
+
+### eng2_subway_tablenavigation_02.walk
+
+
+
+### eng2_73b2kitchen.walk
+
+
+
+### eng2_73b2trashcans.walk
+
+
+
+## How to add autowalk data in this package
+
+1. record a new autowalk data
+2. archive and compress an autowalk data directory (e.g. `autowalk.walk`) to `autowalk.walk.tar.gz` by `tar -zcvf autowalk.walk.tar.gz autowalk.walk`
+3. upload `autowalk.walk.tar.gz` to [jsk_data public google drive folger](https://drive.google.com/drive/folders/1PPOZDoWbJnxM7XkPMPP3iKQqrji56Vgq?usp=sharing)
+4. add new entry to download_autowalk_data.py like
+
+```
+ download_data(
+ pkg_name=PKG,
+ path='autowalk/autowalk.walk.tar.gz',
+ url='https://drive.google.com/uc?id=',
+ md5='',
+ extract=True
+ )
+```
+
+5. update README.md
diff --git a/jsk_spot_robot/spot_autowalk_data/autowalk/.gitignore b/jsk_spot_robot/spot_autowalk_data/autowalk/.gitignore
new file mode 100644
index 0000000000..72e8ffc0db
--- /dev/null
+++ b/jsk_spot_robot/spot_autowalk_data/autowalk/.gitignore
@@ -0,0 +1 @@
+*
diff --git a/jsk_spot_robot/spot_autowalk_data/package.xml b/jsk_spot_robot/spot_autowalk_data/package.xml
new file mode 100644
index 0000000000..a77a1f0987
--- /dev/null
+++ b/jsk_spot_robot/spot_autowalk_data/package.xml
@@ -0,0 +1,21 @@
+
+
+ spot_autowalk_data
+ 1.1.0
+ The spot_autowalk_data package
+
+ Kei Okada
+ Koki Shinjo
+ Koki Shinjo
+
+ BSD
+
+ catkin
+ jsk_data
+ catkin_virtualenv
+ python-gdown-pip
+
+
+ requirements.txt
+
+
diff --git a/jsk_spot_robot/spot_autowalk_data/requirements.txt b/jsk_spot_robot/spot_autowalk_data/requirements.txt
new file mode 100644
index 0000000000..934b434976
--- /dev/null
+++ b/jsk_spot_robot/spot_autowalk_data/requirements.txt
@@ -0,0 +1,4 @@
+bosdyn-client
+bosdyn-mission
+bosdyn-choreography-client
+vtk
diff --git a/jsk_spot_robot/spot_autowalk_data/scripts/download_autowalk_data.py b/jsk_spot_robot/spot_autowalk_data/scripts/download_autowalk_data.py
new file mode 100755
index 0000000000..78a5b07b06
--- /dev/null
+++ b/jsk_spot_robot/spot_autowalk_data/scripts/download_autowalk_data.py
@@ -0,0 +1,306 @@
+#!/usr/bin/env python
+
+from jsk_data import download_data
+
+
+def main():
+ PKG = 'spot_autowalk_data'
+
+ download_data(
+ pkg_name=PKG,
+ path='autowalk/eng2_73B2_to_81C1.walk.tar.gz',
+ url='https://drive.google.com/uc?id=1IDTCP7n4LCowizW3mFQvTOQtE4qOH9tx',
+ md5='65f09629c0ac2aa21df6f179c9875bd0',
+ extract=True
+ )
+
+ download_data(
+ pkg_name=PKG,
+ path='autowalk/eng2_73B2_to_7FElevator.walk.tar.gz',
+ url='https://drive.google.com/uc?id=1O8o6voq2v8WenfaUYcmpSU-IwJSsXW5_',
+ md5='b75ff21caf475a044e7ea197ffe9e378',
+ extract=True
+ )
+
+ download_data(
+ pkg_name=PKG,
+ path='autowalk/eng2_7FElevator_to_2FElevator.walk.tar.gz',
+ url='https://drive.google.com/uc?id=12MOg5okckmQlYiM6flkdeMYxqjn9-C9l',
+ md5='67ae3210cbfb55791fff6494f84abb3b',
+ extract=True
+ )
+
+ download_data(
+ pkg_name=PKG,
+ path='autowalk/eng2_elevator_7FElevator_to_2FElevator.walk.tar.gz',
+ url='https://drive.google.com/uc?id=1iyx0y1dPu4HUPMNepR_VaZd_WEaC5Lku',
+ md5='915916d084abd54c2c17f0738a726da3',
+ extract=True
+ )
+
+ download_data(
+ pkg_name=PKG,
+ path='autowalk/eng2_2FElevator_to_2FEntrance.walk.tar.gz',
+ url='https://drive.google.com/uc?id=1cYUn_qnRslWuH0ZMEBN6ovqmdcUB0MzY',
+ md5='78c6e1e8e5967b216c9f53e38893750e',
+ extract=True
+ )
+
+ download_data(
+ pkg_name=PKG,
+ path='autowalk/eng2_2FElevator_to_MainGate.walk.tar.gz',
+ url='https://drive.google.com/uc?id=1CIuStpjxIA188MLxUsfUjI-47Ev36Wiv',
+ md5='47d669bcb1394b97c95e5d77f78da3e5',
+ extract=True
+ )
+
+ download_data(
+ pkg_name=PKG,
+ path='autowalk/eng2_2FElevator_to_eng8_2FElevator.walk.tar.gz',
+ url='https://drive.google.com/uc?id=1oyU1ufqy9gryPXw8YZ45Ff7AR8K825dT',
+ md5='ac9a67567104df2ddd78b8c53fa61ba2',
+ extract=True
+ )
+
+ download_data(
+ pkg_name=PKG,
+ path='autowalk/eng_TelephoneBox_to_HongoMainGate.walk.tar.gz',
+ url='https://drive.google.com/uc?id=120WC6SE4C_9XIvy0j3HEraljIigjcJ5U',
+ md5='6f89cd74bea3934171e0ae720747da24',
+ extract=True
+ )
+
+ download_data(
+ pkg_name=PKG,
+ path='autowalk/eng2_3FElevator_to_Mech_Office.walk.tar.gz',
+ url='https://drive.google.com/uc?id=10pWP1qnbr5TCfQVUeOHnDacdwQ3X3Awh',
+ md5='52564afd6471c9551c8f77ac031a366d',
+ extract=True
+ )
+
+ download_data(
+ pkg_name=PKG,
+ path='autowalk/eng2_elevator_3FElevator_to_2FElevator.walk.tar.gz',
+ url='https://drive.google.com/uc?id=1OFB38ISYjTtu9A87QtfYyVLhtcGnpu2a',
+ md5='e8ed341b22c5eb66373d29b580bede05',
+ extract=True
+ )
+
+ download_data(
+ pkg_name=PKG,
+ path='autowalk/eng2_2FElevator_to_MainEntrance.walk.tar.gz',
+ url='https://drive.google.com/uc?id=1e5hCLtfOlDYWhrQoefYGxz2AnjaSfs_f',
+ md5='e79f25769b702c203d4f9229c81a1f89',
+ extract=True
+ )
+
+ download_data(
+ pkg_name=PKG,
+ path='autowalk/eng2_MainEntrance_to_HongoMainGate.walk.tar.gz',
+ url='https://drive.google.com/uc?id=13mG7iFMkFWN04S7BeR2rPwvpL-0cTgko',
+ md5='e0260203d5a3fa4958014b4149c3749a',
+ extract=True
+ )
+
+ download_data(
+ pkg_name=PKG,
+ path='autowalk/eng2_MainEntrance_to_HongoMainGate_Daylight.walk.tar.gz',
+ url='https://drive.google.com/uc?id=1EHpKaMBa8rnRZRyK8KwTK3727cxNqph4',
+ md5='43cff60ed9dc444d3d7de0e4ef304d0f',
+ extract=True
+ )
+
+ download_data(
+ pkg_name=PKG,
+ path='autowalk/73b2_inside.walk.tar.gz',
+ url='https://drive.google.com/uc?id=14BPDOJBNS2v5EoUyIZ9gDwm4VFXyj-FD',
+ md5='5b45fcd7271f42f32414602145b77bd8',
+ extract=True
+ )
+
+ download_data(
+ pkg_name=PKG,
+ path='autowalk/eng2_1FElevator_to_1FGarbageCollectionAreaSouth.walk.tar.gz',
+ url='https://drive.google.com/uc?id=1eZbBLwzl9nVpSAebtux5nbN1B4UfGEoh',
+ md5='01ef288775d6c21a634a17fa427e4900',
+ extract=True
+ )
+
+ download_data(
+ pkg_name=PKG,
+ path='autowalk/eng2_1FElevator_to_1FGarbageCollectionAreaEast.walk.tar.gz',
+ url='https://drive.google.com/uc?id=1_zySu-e94wzHLaLYTbQuUd9A0Sb8x9NQ',
+ md5='fc9fb3161b745ff5f7b62be8977f7e56',
+ extract=True
+ )
+
+ download_data(
+ pkg_name=PKG,
+ path='autowalk/eng2_elevator_7FElevator_to_1FElevator.walk.tar.gz',
+ url='https://drive.google.com/uc?id=1kLSNCn2lhkcdOFBaYSVHUFzklhVz_jL8',
+ md5='fa5a26677d9136ef4671d7a32ca59097',
+ extract=True
+ )
+
+ download_data(
+ pkg_name=PKG,
+ path='autowalk/eng2_1FElevator_to_1FGarbageCollectionAreaSouth_via213.walk.tar.gz',
+ url='https://drive.google.com/uc?id=1oSFjkwG0EcVXapMVgLlc_i1VtcWXwEwE',
+ md5='72ba498fe56700bee31c8ce166e77008',
+ extract=True
+ )
+
+ download_data(
+ pkg_name=PKG,
+ path='autowalk/eng2_2FElevator_to_subway.walk.tar.gz',
+ url='https://drive.google.com/uc?id=1uRZA0JnFyenVcZDtXhQGzqGAIcO9lwop',
+ md5='ef40ee8677ef68b4beee4e516a11d1f1',
+ extract=True
+ )
+
+ download_data(
+ pkg_name=PKG,
+ path='autowalk/eng2_subway_tablenavigation.walk.tar.gz',
+ url='https://drive.google.com/uc?id=1Lye5ZfFLgmU-G8TdevSiHG72kN04XnFt',
+ md5='e65a06fbb7b2037659bf657ebb4e5d36',
+ extract=True
+ )
+
+ download_data(
+ pkg_name=PKG,
+ path='autowalk/eng2_subway_tablenavigation_02.walk.tar.gz',
+ url='https://drive.google.com/uc?id=1GgIra90yX21IMYYL8VgrY9YJpGevA1ek',
+ md5='08eca6ac0e1310236f32f229370aa161',
+ extract=True
+ )
+
+ download_data(
+ pkg_name=PKG,
+ path='autowalk/eng2_1FElevator_to_GarbageCollectionArea_inside_clockwise.walk.tar.gz',
+ url='https://drive.google.com/uc?id=1Ur6pZZKxZQsP_3zsbikWFkOWOB1KsKlb',
+ md5='da542fc9b4376378dc2a644454175e06',
+ extract=True
+ )
+
+ download_data(
+ pkg_name=PKG,
+ path='autowalk/eng2_GarbageCollectionArea_inside_clockwise.walk.tar.gz',
+ url='https://drive.google.com/uc?id=1ipkw696vWe_DeO87ZcoQmTgFUE7adpL7',
+ md5='71d5555f4f6772a9022768fe5dabf813',
+ extract=True
+ )
+
+ download_data(
+ pkg_name=PKG,
+ path='autowalk/eng2_GarbageCollectionArea_inside_counterclockwise.walk.tar.gz',
+ url='https://drive.google.com/uc?id=1pIrpc_q9GVCtH4YO2-E2rXSEf1yTfP4U',
+ md5='d0f279bc94b194600bccf3a1c5d98c35',
+ extract=True
+ )
+
+ download_data(
+ pkg_name=PKG,
+ path='autowalk/eng2_GarbageCollectionArea_to_1FElevator.walk.tar.gz',
+ url='https://drive.google.com/uc?id=1rUCVbhbSmUd4OEA6W35quKs-6CJIJW7b',
+ md5='2fdfc99d640bc9c796c36e3127078fcf',
+ extract=True
+ )
+
+ download_data(
+ pkg_name=PKG,
+ path='autowalk/eng2_73b2kitchen.walk.tar.gz',
+ url='https://drive.google.com/uc?id=1JrDRIQpGpB6sqofIyk9eR03KsE2EJ5Ev',
+ md5='8666d1c8b21ae7ffb88978ed0b1bfb33',
+ extract=True
+ )
+
+ download_data(
+ pkg_name=PKG,
+ path='autowalk/eng2_73b2trashcans.walk.tar.gz',
+ url='https://drive.google.com/uc?id=1w19wmLsQHMM9ErjK4mN-zstWkvrHITLO',
+ md5='264c2e561a0c128a26b490059e10e30c',
+ extract=True
+ )
+
+ download_data(
+ pkg_name=PKG,
+ path='autowalk/eng2_MechOffice_inside.walk.tar.gz',
+ url='https://drive.google.com/uc?id=1dSbU0tADrxwGLEBywMt312NXUgFHtsCy',
+ md5='5460bc55c34824ce75722881a4e0b77d',
+ extract=True
+ )
+
+ download_data(
+ pkg_name=PKG,
+ path='autowalk/eng2_MechOffice_to_MainEntrance.walk.tar.gz',
+ url='https://drive.google.com/uc?id=1aepZnkxV8SLo9a8DdCEU9KnNoyjG7sZF',
+ md5='4aba2398e8eae87509820180b2e89cb0',
+ extract=True
+ )
+
+ download_data(
+ pkg_name=PKG,
+ path='autowalk/eng2_MechOffice_to_3felevator_subwayside.walk.tar.gz',
+ url='https://drive.google.com/uc?id=1twc6Ui5z7nqqZHMHPeynNAyE19PKyihN',
+ md5='6d720c0c6f5692a205b386c9248d69f6',
+ extract=True
+ )
+
+ download_data(
+ pkg_name=PKG,
+ path='autowalk/eng2_1fentrance_to_1FElevator.walk.tar.gz',
+ url='https://drive.google.com/uc?id=1Q7gX8Cg58dUtV0he7R8fxYciinYnAmd9',
+ md5='b82831bd317014367af5f28614368bd9',
+ extract=True
+ )
+
+ download_data(
+ pkg_name=PKG,
+ path='autowalk/eng2_2fentrance_to_1fentrance.walk.tar.gz',
+ url='https://drive.google.com/uc?id=1eKdUYOyWEO2lz07uUlpayb6StFC_hCco',
+ md5='0b7c8e960825014a3d3b4637265e966c',
+ extract=True
+ )
+
+ download_data(
+ pkg_name=PKG,
+ path='autowalk/eng2_73B2_to_83A2.walk.tar.gz',
+ url='https://drive.google.com/uc?id=1GwOD53C7I8dpi3YcrrMcHlHbN3k_Auj1',
+ md5='aa063402ab604b012ae7c7a4123fb5ac',
+ extract=True
+ )
+
+ download_data(
+ pkg_name=PKG,
+ path='autowalk/eng2_7FElevator_to_73B2_trash.walk.tar.gz',
+ url='https://drive.google.com/uc?id=1gmkQa5oTSIJAKST8SBLev_nui_XN40dE',
+ md5='d8b0711270fb2ae67159d28d50bb5231',
+ extract=True
+ )
+
+ download_data(
+ pkg_name=PKG,
+ path='autowalk/eng2_7f_around.walk.tar.gz',
+ url='https://drive.google.com/uc?id=1lKELjOiUU02RnrK2V7AWos8GkJqylEKu',
+ md5='daae9c4c7555780b148baad7906b6710',
+ extract=True
+ )
+
+ download_data(
+ pkg_name=PKG,
+ path='autowalk/eng2_outside.walk.tar.gz',
+ url='https://drive.google.com/uc?id=1E9QJJYz7Puk72KL2lFRTKfPtRiCHZYYw',
+ md5='f44de8d70da1bd1a512b5e1002335c81',
+ extract=True
+ )
+
+ download_data(
+ pkg_name=PKG,
+ path='autowalk/eng2_8F.walk.tar.gz',
+ url='https://drive.google.com/uc?id=1LPluVprB4FCZ8L7ePpeQM8qFzijHQ3Ic',
+ md5='1032a79f9ac5201caddcefcb867637a5',
+ extract=True
+ )
+
+if __name__ == '__main__':
+ main()
diff --git a/jsk_spot_robot/spot_autowalk_data/scripts/view_map.py b/jsk_spot_robot/spot_autowalk_data/scripts/view_map.py
new file mode 100644
index 0000000000..16891ea280
--- /dev/null
+++ b/jsk_spot_robot/spot_autowalk_data/scripts/view_map.py
@@ -0,0 +1,405 @@
+#!/usr/bin/env python3
+# Copyright (c) 2021 Boston Dynamics, Inc. All rights reserved.
+#
+# Downloading, reproducing, distributing or otherwise using the SDK Software
+# is subject to the terms and conditions of the Boston Dynamics Software
+# Development Kit License (20191101-BDSDK-SL).
+
+import argparse
+
+from vtk.util import numpy_support
+import google.protobuf.timestamp_pb2
+import math
+import numpy as np
+import numpy.linalg
+import os
+import sys
+import time
+import vtk
+
+from bosdyn.api.graph_nav import map_pb2
+from bosdyn.api import geometry_pb2
+from bosdyn.client.frame_helpers import *
+from bosdyn.client.math_helpers import *
+"""
+This example shows how to load and view a graph nav map.
+
+"""
+
+
+def numpy_to_poly_data(pts):
+ """
+ Converts numpy array data into vtk poly data.
+ :param pts: the numpy array to convert (3 x N).
+ :return: a vtkPolyData.
+ """
+ pd = vtk.vtkPolyData()
+ pd.SetPoints(vtk.vtkPoints())
+ # Makes a deep copy
+ pd.GetPoints().SetData(numpy_support.numpy_to_vtk(pts.copy()))
+
+ f = vtk.vtkVertexGlyphFilter()
+ f.SetInputData(pd)
+ f.Update()
+ pd = f.GetOutput()
+
+ return pd
+
+
+def mat_to_vtk(mat):
+ """
+ Converts a 4x4 homogenous transform into a vtk transform object.
+ :param mat: A 4x4 homogenous transform (numpy array).
+ :return: A VTK transform object representing the transform.
+ """
+ t = vtk.vtkTransform()
+ t.SetMatrix(mat.flatten())
+ return t
+
+
+def vtk_to_mat(transform):
+ """
+ Converts a VTK transform object to 4x4 homogenous numpy matrix.
+ :param transform: an object of type vtkTransform
+ : return: a numpy array with a 4x4 matrix representation of the transform.
+ """
+ tf_matrix = transform.GetMatrix()
+ out = np.array(np.eye(4))
+ for r in range(4):
+ for c in range(4):
+ out[r, c] = tf_matrix.GetElement(r, c)
+ return out
+
+
+def api_to_vtk_se3_pose(se3_pose):
+ """
+ Convert a bosdyn SDK SE3Pose into a VTK pose.
+ :param se3_pose: the bosdyn SDK SE3 Pose.
+ :return: A VTK pose representing the bosdyn SDK SE3 Pose.
+ """
+ return mat_to_vtk(se3_pose.to_matrix())
+
+
+def create_fiducial_object(world_object, waypoint, renderer):
+ """
+ Creates a VTK object representing a fiducial.
+ :param world_object: A WorldObject representing a fiducial.
+ :param waypoint: The waypoint the AprilTag is associated with.
+ :param renderer: The VTK renderer
+ :return: a tuple of (vtkActor, 4x4 homogenous transform) representing the vtk actor for the fiducial, and its
+ transform w.r.t the waypoint.
+ """
+ fiducial_object = world_object.apriltag_properties
+ odom_tform_fiducial_filtered = get_a_tform_b(
+ world_object.transforms_snapshot, ODOM_FRAME_NAME,
+ world_object.apriltag_properties.frame_name_fiducial_filtered)
+ waypoint_tform_odom = SE3Pose.from_obj(waypoint.waypoint_tform_ko)
+ waypoint_tform_fiducial_filtered = api_to_vtk_se3_pose(
+ waypoint_tform_odom * odom_tform_fiducial_filtered)
+ plane_source = vtk.vtkPlaneSource()
+ plane_source.SetCenter(0.0, 0.0, 0.0)
+ plane_source.SetNormal(0.0, 0.0, 1.0)
+ plane_source.Update()
+ plane = plane_source.GetOutput()
+ mapper = vtk.vtkPolyDataMapper()
+ mapper.SetInputData(plane)
+
+ actor = vtk.vtkActor()
+ actor.SetMapper(mapper)
+ actor.GetProperty().SetColor(0.5, 0.7, 0.9)
+ actor.SetScale(fiducial_object.dimensions.x, fiducial_object.dimensions.y, 1.0)
+ renderer.AddActor(actor)
+ return actor, waypoint_tform_fiducial_filtered
+
+
+def create_point_cloud_object(waypoints, snapshots, waypoint_id):
+ """
+ Create a VTK object representing the point cloud in a snapshot. Note that in graph_nav, "point cloud" refers to the
+ feature cloud of a waypoint -- that is, a collection of visual features observed by all five cameras at a particular
+ point in time. The visual features are associated with points that are rigidly attached to a waypoint.
+ :param waypoints: dict of waypoint ID to waypoint.
+ :param snapshots: dict of waypoint snapshot ID to waypoint snapshot.
+ :param waypoint_id: the waypoint ID of the waypoint whose point cloud we want to render.
+ :return: a vtkActor containing the point cloud data.
+ """
+ wp = waypoints[waypoint_id]
+ snapshot = snapshots[wp.snapshot_id]
+ cloud = snapshot.point_cloud
+ odom_tform_cloud = get_a_tform_b(cloud.source.transforms_snapshot, ODOM_FRAME_NAME,
+ cloud.source.frame_name_sensor)
+ waypoint_tform_odom = SE3Pose.from_obj(wp.waypoint_tform_ko)
+ waypoint_tform_cloud = api_to_vtk_se3_pose(waypoint_tform_odom * odom_tform_cloud)
+
+ point_cloud_data = np.frombuffer(cloud.data, dtype=np.float32).reshape(int(cloud.num_points), 3)
+ poly_data = numpy_to_poly_data(point_cloud_data)
+ arr = vtk.vtkFloatArray()
+ for i in range(cloud.num_points):
+ arr.InsertNextValue(point_cloud_data[i, 2])
+ arr.SetName("z_coord")
+ poly_data.GetPointData().AddArray(arr)
+ poly_data.GetPointData().SetActiveScalars("z_coord")
+ actor = vtk.vtkActor()
+ mapper = vtk.vtkPolyDataMapper()
+ mapper.SetInputData(poly_data)
+ mapper.ScalarVisibilityOn()
+ actor.SetMapper(mapper)
+ actor.GetProperty().SetPointSize(2)
+ actor.SetUserTransform(waypoint_tform_cloud)
+ return actor
+
+
+def create_waypoint_object(renderer, waypoints, snapshots, waypoint_id):
+ """
+ Creates a VTK object representing a waypoint and its point cloud.
+ :param renderer: The VTK renderer.
+ :param waypoints: dict of waypoint ID to waypoint.
+ :param snapshots: dict of snapshot ID to snapshot.
+ :param waypoint_id: the waypoint id of the waypoint object we wish to create.
+ :return: A vtkAssembly representing the waypoint (an axis) and its point cloud.
+ """
+ assembly = vtk.vtkAssembly()
+ actor = vtk.vtkAxesActor()
+ actor.SetXAxisLabelText("")
+ actor.SetYAxisLabelText("")
+ actor.SetZAxisLabelText("")
+ actor.SetTotalLength(0.2, 0.2, 0.2)
+ point_cloud_actor = create_point_cloud_object(waypoints, snapshots, waypoint_id)
+ assembly.AddPart(actor)
+ assembly.AddPart(point_cloud_actor)
+ renderer.AddActor(assembly)
+ return assembly
+
+
+def make_line(pt_A, pt_B, renderer):
+ """
+ Creates a VTK object which is a white line between two points.
+ :param pt_A: starting point of the line.
+ :param pt_B: ending point of the line.
+ :param renderer: the VTK renderer.
+ :return: A VTK object that is a while line between pt_A and pt_B.
+ """
+ line_source = vtk.vtkLineSource()
+ line_source.SetPoint1(pt_A[0], pt_A[1], pt_A[2])
+ line_source.SetPoint2(pt_B[0], pt_B[1], pt_B[2])
+ mapper = vtk.vtkPolyDataMapper()
+ mapper.SetInputConnection(line_source.GetOutputPort())
+
+ actor = vtk.vtkActor()
+ actor.SetMapper(mapper)
+ actor.GetProperty().SetLineWidth(2)
+ actor.GetProperty().SetColor(0.7, 0.7, 0.7)
+ renderer.AddActor(actor)
+ return actor
+
+
+def make_text(name, pt, renderer):
+ """
+ Creates white text on a black background at a particular point.
+ :param name: The text to display.
+ :param pt: The point in the world where the text will be displayed.
+ :param renderer: The VTK renderer
+ :return: the vtkActor representing the text.
+ """
+ actor = vtk.vtkTextActor()
+ actor.SetInput(name)
+ prop = actor.GetTextProperty()
+ prop.SetBackgroundColor(0.0, 0.0, 0.0)
+ prop.SetBackgroundOpacity(0.5)
+ prop.SetFontSize(16)
+ coord = actor.GetPositionCoordinate()
+ coord.SetCoordinateSystemToWorld()
+ coord.SetValue((pt[0], pt[1], pt[2]))
+
+ renderer.AddActor(actor)
+ return actor
+
+
+def create_edge_object(curr_wp_tform_to_wp, world_tform_curr_wp, renderer):
+ # Concatenate the edge transform.
+ world_tform_to_wp = np.dot(world_tform_curr_wp, curr_wp_tform_to_wp)
+ # Make a line between the current waypoint and the neighbor.
+ make_line(world_tform_curr_wp[:3, 3], world_tform_to_wp[:3, 3], renderer)
+ return world_tform_to_wp
+
+
+def load_map(path):
+ """
+ Load a map from the given file path.
+ :param path: Path to the root directory of the map.
+ :return: the graph, waypoints, waypoint snapshots and edge snapshots.
+ """
+ with open(os.path.join(path, "graph"), "rb") as graph_file:
+ # Load the graph file and deserialize it. The graph file is a protobuf containing only the waypoints and the
+ # edges between them.
+ data = graph_file.read()
+ current_graph = map_pb2.Graph()
+ current_graph.ParseFromString(data)
+
+ # Set up maps from waypoint ID to waypoints, edges, snapshots, etc.
+ current_waypoints = {}
+ current_waypoint_snapshots = {}
+ current_edge_snapshots = {}
+
+ # For each waypoint, load any snapshot associated with it.
+ for waypoint in current_graph.waypoints:
+ current_waypoints[waypoint.id] = waypoint
+
+ # Load the snapshot. Note that snapshots contain all of the raw data in a waypoint and may be large.
+ file_name = os.path.join(path, "waypoint_snapshots", waypoint.snapshot_id)
+ if not os.path.exists(file_name):
+ continue
+ with open(file_name, "rb") as snapshot_file:
+ waypoint_snapshot = map_pb2.WaypointSnapshot()
+ waypoint_snapshot.ParseFromString(snapshot_file.read())
+ current_waypoint_snapshots[waypoint_snapshot.id] = waypoint_snapshot
+ # Similarly, edges have snapshot data.
+ for edge in current_graph.edges:
+
+ if not edge.snapshot_id:
+ continue # Rare case that snapshot id is empty
+
+ file_name = os.path.join(path, "edge_snapshots", edge.snapshot_id)
+ if not os.path.exists(file_name):
+ continue
+ with open(file_name, "rb") as snapshot_file:
+ edge_snapshot = map_pb2.EdgeSnapshot()
+ edge_snapshot.ParseFromString(snapshot_file.read())
+ current_edge_snapshots[edge_snapshot.id] = edge_snapshot
+ print("Loaded graph with {} waypoints and {} edges".format(
+ len(current_graph.waypoints), len(current_graph.edges)))
+ return (current_graph, current_waypoints, current_waypoint_snapshots,
+ current_edge_snapshots)
+
+
+def create_graph_objects(current_graph, current_waypoint_snapshots, current_waypoints, renderer, draw_id=True):
+ """
+ Creates all the VTK objects associated with the graph.
+ :param current_graph: the graph to use.
+ :param current_waypoint_snapshots: dict from snapshot id to snapshot.
+ :param current_waypoints: dict from waypoint id to waypoint.
+ :param renderer: The VTK renderer
+ :return: the average position in world space of all the waypoints.
+ """
+ waypoint_objects = {}
+ # Create VTK objects associated with each waypoint.
+ for waypoint in current_graph.waypoints:
+ waypoint_objects[waypoint.id] = create_waypoint_object(renderer, current_waypoints,
+ current_waypoint_snapshots,
+ waypoint.id)
+ # Now, perform a breadth first search of the graph starting from an arbitrary waypoint. Graph nav graphs
+ # have no global reference frame. The only thing we can say about waypoints is that they have relative
+ # transformations to their neighbors via edges. So the goal is to get the whole graph into a global reference
+ # frame centered on some waypoint as the origin.
+ queue = []
+ queue.append((current_graph.waypoints[0], np.eye(4)))
+ visited = {}
+ # Get the camera in the ballpark of the right position by centering it on the average position of a waypoint.
+ avg_pos = np.array([0.0, 0.0, 0.0])
+
+ # Breadth first search.
+ while len(queue) > 0:
+ # Visit a waypoint.
+ curr_element = queue[0]
+ queue.pop(0)
+ curr_waypoint = curr_element[0]
+ visited[curr_waypoint.id] = True
+
+ # We now know the global pose of this waypoint, so set the pose.
+ waypoint_objects[curr_waypoint.id].SetUserTransform(mat_to_vtk(curr_element[1]))
+ world_tform_current_waypoint = curr_element[1]
+ # Add text to the waypoint.
+ print('{}: {}'.format(curr_waypoint.annotations.name, curr_waypoint.id))
+ if draw_id:
+ make_text(
+ '{}: {}'.format(curr_waypoint.annotations.name, curr_waypoint.id),
+ world_tform_current_waypoint[:3, 3],
+ renderer)
+
+ # For each fiducial in the waypoint's snapshot, add an object at the world pose of that fiducial.
+ if (curr_waypoint.snapshot_id in current_waypoint_snapshots):
+ snapshot = current_waypoint_snapshots[curr_waypoint.snapshot_id]
+ for fiducial in snapshot.objects:
+ if fiducial.HasField("apriltag_properties"):
+ (fiducial_object,
+ curr_wp_tform_fiducial) = create_fiducial_object(fiducial, curr_waypoint,
+ renderer)
+ world_tform_fiducial = np.dot(world_tform_current_waypoint,
+ vtk_to_mat(curr_wp_tform_fiducial))
+ fiducial_object.SetUserTransform(mat_to_vtk(world_tform_fiducial))
+ make_text(
+ 'fid: {}'.format(fiducial.apriltag_properties.tag_id), world_tform_fiducial[:3, 3],
+ renderer)
+
+ # Now, for each edge, walk along the edge and concatenate the transform to the neighbor.
+ for edge in current_graph.edges:
+ # If the edge is directed away from us...
+ if edge.id.from_waypoint == curr_waypoint.id and edge.id.to_waypoint not in visited:
+ current_waypoint_tform_to_waypoint = SE3Pose.from_obj(
+ edge.from_tform_to).to_matrix()
+ world_tform_to_wp = create_edge_object(current_waypoint_tform_to_waypoint,
+ world_tform_current_waypoint, renderer)
+ # Add the neighbor to the queue.
+ queue.append((current_waypoints[edge.id.to_waypoint], world_tform_to_wp))
+ avg_pos += world_tform_to_wp[:3, 3]
+ # If the edge is directed toward us...
+ elif edge.id.to_waypoint == curr_waypoint.id and edge.id.from_waypoint not in visited:
+ current_waypoint_tform_from_waypoint = (SE3Pose.from_obj(
+ edge.from_tform_to).inverse()).to_matrix()
+ world_tform_from_wp = create_edge_object(current_waypoint_tform_from_waypoint,
+ world_tform_current_waypoint, renderer)
+ # Add the neighbor to the queue.
+ queue.append((current_waypoints[edge.id.from_waypoint], world_tform_from_wp))
+ avg_pos += world_tform_from_wp[:3, 3]
+ return avg_pos
+
+
+def main( path, draw_id ):
+ # Load the map from the given file.
+ (current_graph, current_waypoints, current_waypoint_snapshots,
+ current_edge_snapshots) = load_map(path)
+
+ # Create the renderer.
+ renderer = vtk.vtkRenderer()
+ renderer.SetBackground(0.05, 0.1, 0.15)
+
+ avg_pos = create_graph_objects(current_graph, current_waypoint_snapshots, current_waypoints,
+ renderer, draw_id)
+
+ # Compute the average waypoint position to place the camera appropriately.
+ avg_pos /= len(current_waypoints)
+ camera_pos = avg_pos + np.array([-1, 0, 5])
+
+ camera = renderer.GetActiveCamera()
+ camera.SetViewUp(0, 0, 1)
+ camera.SetPosition(camera_pos[0], camera_pos[1], camera_pos[2])
+
+ # Create the VTK renderer and interactor.
+ renderWindow = vtk.vtkRenderWindow()
+ renderWindow.SetWindowName(path)
+ renderWindow.AddRenderer(renderer)
+ renderWindowInteractor = vtk.vtkRenderWindowInteractor()
+ renderWindowInteractor.SetRenderWindow(renderWindow)
+ renderWindow.SetSize(1280, 720)
+ style = vtk.vtkInteractorStyleTerrain()
+ renderWindowInteractor.SetInteractorStyle(style)
+ renderer.ResetCamera()
+
+ # Start rendering.
+ renderWindow.Render()
+ renderWindow.Start()
+ renderWindowInteractor.Start()
+
+
+if __name__ == '__main__':
+
+ parser = argparse.ArgumentParser()
+
+ parser.add_argument('map_directory')
+ parser.add_argument('--draw-id', help='Draw ID of each waypoints', action='store_true')
+
+ args = parser.parse_args()
+
+ if args.draw_id:
+ main( args.map_directory, True )
+ else:
+ main( args.map_directory, False )
diff --git a/jsk_spot_robot/spot_ros_client/.vscode/c_cpp_properties.json b/jsk_spot_robot/spot_ros_client/.vscode/c_cpp_properties.json
new file mode 100644
index 0000000000..2efcb04f38
--- /dev/null
+++ b/jsk_spot_robot/spot_ros_client/.vscode/c_cpp_properties.json
@@ -0,0 +1,30 @@
+{
+ "configurations": [
+ {
+ "browse": {
+ "databaseFilename": "${default}",
+ "limitSymbolsToIncludedHeaders": false
+ },
+ "includePath": [
+ "/home/sktometometo/ros/ws_jsk_spot/devel/include/**",
+ "/opt/ros/noetic/include/**",
+ "/home/sktometometo/ros/ws_jsk_spot/src/jsk-ros-pkg/jsk_robot/jsk_robot_common/jsk_robot_startup/include/**",
+ "/opt/ros/noetic/share/julius/include/**",
+ "/home/sktometometo/ros/ws_jsk_spot/src/jsk-ros-pkg/jsk_robot/jsk_pr2_robot/pr2_base_trajectory_action/include/**",
+ "/home/sktometometo/ros/ws_jsk_spot/src/jsk-ros-pkg/jsk_robot/jsk_robot_common/speak_and_wait_recovery/include/**",
+ "/home/sktometometo/ros/ws_jsk_spot/src/ublox/ublox_gps/include/**",
+ "/home/sktometometo/ros/ws_jsk_spot/src/ublox/ublox_msg_filters/include/**",
+ "/home/sktometometo/ros/ws_jsk_spot/src/ublox/ublox_msgs/include/**",
+ "/home/sktometometo/ros/ws_jsk_spot/src/ublox/ublox_serialization/include/**",
+ "/home/sktometometo/ros/ws_jsk_spot/src/jsk-ros-pkg/jsk_robot/jsk_robot_common/update_move_base_parameter_recovery/include/**",
+ "/usr/include/**"
+ ],
+ "name": "ROS",
+ "intelliSenseMode": "gcc-x64",
+ "compilerPath": "/usr/bin/gcc",
+ "cStandard": "gnu11",
+ "cppStandard": "c++14"
+ }
+ ],
+ "version": 4
+}
\ No newline at end of file
diff --git a/jsk_spot_robot/spot_ros_client/.vscode/settings.json b/jsk_spot_robot/spot_ros_client/.vscode/settings.json
new file mode 100644
index 0000000000..97568205e8
--- /dev/null
+++ b/jsk_spot_robot/spot_ros_client/.vscode/settings.json
@@ -0,0 +1,10 @@
+{
+ "python.autoComplete.extraPaths": [
+ "/home/sktometometo/ros/ws_jsk_spot/devel/lib/python3/dist-packages",
+ "/opt/ros/noetic/lib/python3/dist-packages"
+ ],
+ "python.analysis.extraPaths": [
+ "/home/sktometometo/ros/ws_jsk_spot/devel/lib/python3/dist-packages",
+ "/opt/ros/noetic/lib/python3/dist-packages"
+ ]
+}
diff --git a/jsk_spot_robot/spot_ros_client/CMakeLists.txt b/jsk_spot_robot/spot_ros_client/CMakeLists.txt
new file mode 100644
index 0000000000..4c7961bfb2
--- /dev/null
+++ b/jsk_spot_robot/spot_ros_client/CMakeLists.txt
@@ -0,0 +1,12 @@
+cmake_minimum_required(VERSION 2.8.3)
+project(spot_ros_client)
+
+find_package(catkin REQUIRED)
+
+catkin_python_setup()
+
+catkin_package()
+
+catkin_install_python(PROGRAMS scripts/demo.py
+ DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
+)
diff --git a/jsk_spot_robot/spot_ros_client/README.md b/jsk_spot_robot/spot_ros_client/README.md
new file mode 100644
index 0000000000..f6918bd87c
--- /dev/null
+++ b/jsk_spot_robot/spot_ros_client/README.md
@@ -0,0 +1,9 @@
+# spot_ros_client
+
+This package provide a python client library for spot_ros.
+
+## Demo
+
+```python
+rosrun spot_ros_client demo.py
+```
diff --git a/jsk_spot_robot/spot_ros_client/package.xml b/jsk_spot_robot/spot_ros_client/package.xml
new file mode 100644
index 0000000000..a0e71c116f
--- /dev/null
+++ b/jsk_spot_robot/spot_ros_client/package.xml
@@ -0,0 +1,31 @@
+
+
+ spot_ros_client
+ 1.1.0
+ The spot_ros_client package
+
+ Koki Shinjo
+
+ Koki Shinjo
+
+ BSD
+
+ catkin
+
+ rospy
+
+ actionlib
+ spot_msgs
+ std_srvs
+ geometry_msgs
+ jsk_spot_behavior_msgs
+
+ actionlib
+ spot_msgs
+ std_srvs
+ geometry_msgs
+ jsk_spot_behavior_msgs
+
+
+
+
diff --git a/jsk_spot_robot/spot_ros_client/scripts/demo.py b/jsk_spot_robot/spot_ros_client/scripts/demo.py
new file mode 100755
index 0000000000..955588af34
--- /dev/null
+++ b/jsk_spot_robot/spot_ros_client/scripts/demo.py
@@ -0,0 +1,99 @@
+#!/usr/bin/env python
+
+import rospy
+import math
+from spot_ros_client.libspotros import SpotRosClient
+from geometry_msgs.msg import Quaternion # for body pose
+
+rospy.init_node('spot_ros_client_demo')
+client = SpotRosClient()
+
+# claim
+rospy.loginfo('claim')
+client.claim()
+rospy.sleep(2)
+
+# power on
+rospy.loginfo('power on')
+client.power_on()
+rospy.sleep(2)
+
+# stand
+rospy.loginfo('stand')
+client.stand()
+rospy.sleep(2)
+
+# sit
+rospy.loginfo('sit')
+client.sit()
+rospy.sleep(2)
+
+# stand
+rospy.loginfo('stand')
+client.stand()
+rospy.sleep(2)
+
+# send velocity commands
+rospy.loginfo('sending cmd_vel')
+rate = rospy.Rate(10)
+start_time = rospy.Time.now()
+while not rospy.is_shutdown() and rospy.Time.now() < start_time + rospy.Duration(10):
+ rate.sleep()
+ client.pub_cmd_vel(0, 0, 0.5)
+
+# change body pose
+quaternion_rotated = Quaternion(x=0,y=0,z=math.sin(0.2),w=math.cos(0.2))
+quaternion_equal = Quaternion(x=0,y=0,z=0,w=1)
+
+rospy.loginfo('rotating body pose')
+client.pub_body_pose(0,quaternion_rotated)
+client.stand()
+rospy.sleep(5)
+
+client.pub_body_pose(0,quaternion_equal)
+client.stand()
+rospy.sleep(5)
+
+rospy.loginfo('changing body height')
+client.pub_body_pose(0.2,quaternion_equal)
+client.stand()
+rospy.sleep(5)
+
+client.pub_body_pose(0,quaternion_equal)
+client.stand()
+rospy.sleep(5)
+
+# switch stair mode
+rospy.loginfo('switching stair mode')
+client.stair_mode(True)
+rospy.sleep(5)
+client.stair_mode(False)
+rospy.sleep(5)
+
+# send a trajectory command
+rospy.loginfo('sending trajectory command')
+client.trajectory(1.0,1.0,1.57,5,blocking=True)
+rospy.sleep(5)
+
+# use graphnav navigation
+## assuming spot is at initial place of example.walk
+rospy.loginfo('sending navigate to command')
+import rospkg
+upload_filepath = rospkg.RosPack().get_path('spot_autowalk_data')+'/autowalk/eng2_73b2_to_81c1_night.walk'
+rospy.loginfo('upload map')
+client.upload_graph(upload_filepath)
+rospy.sleep(1)
+rospy.loginfo('localization')
+client.set_localization_fiducial()
+rospy.sleep(1)
+rospy.loginfo('list graph')
+waypoint_ids = client.list_graph()
+rospy.sleep(1)
+rospy.loginfo('send command')
+client.navigate_to(waypoint_ids[-1],blocking=False)
+rospy.sleep(1)
+rospy.loginfo('wait for result')
+client.wait_navigate_to_result(rospy.Duration(30))
+rospy.sleep(1)
+rospy.loginfo('get a result')
+result = client.get_navigate_to_result()
diff --git a/jsk_spot_robot/spot_ros_client/setup.py b/jsk_spot_robot/spot_ros_client/setup.py
new file mode 100644
index 0000000000..fa9d4a812b
--- /dev/null
+++ b/jsk_spot_robot/spot_ros_client/setup.py
@@ -0,0 +1,9 @@
+from setuptools import setup
+from catkin_pkg.python_setup import generate_distutils_setup
+
+d = generate_distutils_setup(
+ packages=['spot_ros_client'],
+ package_dir={'': 'src'}
+ )
+
+setup(**d)
diff --git a/jsk_spot_robot/spot_ros_client/src/spot_ros_client/__init__.py b/jsk_spot_robot/spot_ros_client/src/spot_ros_client/__init__.py
new file mode 100644
index 0000000000..a45c5f4930
--- /dev/null
+++ b/jsk_spot_robot/spot_ros_client/src/spot_ros_client/__init__.py
@@ -0,0 +1 @@
+import spot_ros_client.libspotros as libspotros
diff --git a/jsk_spot_robot/spot_ros_client/src/spot_ros_client/libspotros.py b/jsk_spot_robot/spot_ros_client/src/spot_ros_client/libspotros.py
new file mode 100644
index 0000000000..86279a1661
--- /dev/null
+++ b/jsk_spot_robot/spot_ros_client/src/spot_ros_client/libspotros.py
@@ -0,0 +1,582 @@
+import PyKDL
+import rospy
+import actionlib
+import tf2_ros
+import tf2_geometry_msgs
+
+import math
+
+# msg
+from std_msgs.msg import Bool
+from std_msgs.msg import Float32
+from std_msgs.msg import String
+from spot_msgs.msg import Feedback
+from spot_msgs.msg import PowerState
+from geometry_msgs.msg import Pose
+from geometry_msgs.msg import PoseArray
+from geometry_msgs.msg import PoseStamped
+from geometry_msgs.msg import Quaternion
+from geometry_msgs.msg import Twist
+# services
+from std_srvs.srv import Trigger
+from std_srvs.srv import TriggerRequest
+from std_srvs.srv import SetBool
+from std_srvs.srv import SetBoolRequest
+from spot_msgs.srv import ListGraph
+from spot_msgs.srv import ListGraphRequest
+from spot_msgs.srv import SetLocalizationFiducial
+from spot_msgs.srv import SetLocalizationFiducialRequest
+from spot_msgs.srv import SetLocalizationWaypoint
+from spot_msgs.srv import SetLocalizationWaypointRequest
+from spot_msgs.srv import SetLocomotion
+from spot_msgs.srv import SetLocomotionRequest
+from spot_msgs.srv import UploadGraph
+from spot_msgs.srv import UploadGraphRequest
+from spot_msgs.srv import Dock
+from spot_msgs.srv import DockRequest
+from jsk_spot_behavior_msgs.srv import ResetCurrentNode, ResetCurrentNodeRequest
+# actions
+from jsk_spot_behavior_msgs.msg import NavigationAction
+from jsk_spot_behavior_msgs.msg import NavigationGoal
+from spot_msgs.msg import NavigateToAction
+from spot_msgs.msg import NavigateToGoal
+from spot_msgs.msg import TrajectoryAction
+from spot_msgs.msg import TrajectoryGoal
+
+
+def calc_distance_to_pose(pose):
+ if isinstance(pose, Pose):
+ return math.sqrt(pose.position.x ** 2 + pose.position.y ** 2 + pose.position.z ** 2)
+ elif isinstance(pose, PoseStamped):
+ pose = pose.pose
+ return math.sqrt(pose.position.x ** 2 + pose.position.y ** 2 + pose.position.z ** 2)
+ else:
+ raise TypeError(
+ 'pose must be geometry_msgs.msg.Pose or geometry_msgs.msg.PoseStamped')
+
+
+def convert_msg_point_to_kdl_vector(point):
+ return PyKDL.Vector(point.x, point.y, point.z)
+
+
+def get_nearest_person_pose(topicname='/spot_recognition_person_tracker/people_pose_array'):
+ try:
+ msg = rospy.wait_for_message(
+ topicname,
+ PoseArray,
+ timeout=rospy.Duration(5))
+ except rospy.ROSException as e:
+ rospy.logwarn('Timeout exceede: {}'.format(e))
+ return None
+
+ if len(msg.poses) == 0:
+ rospy.logwarn('No person visible')
+ return None
+
+ distance = calc_distance_to_pose(msg.poses[0])
+ target_pose = msg.poses[0]
+ for pose in msg.poses:
+ if calc_distance_to_pose(pose) < distance:
+ distance = calc_distance_to_pose(pose)
+ target_pose = pose
+
+ pose_stamped = PoseStamped()
+ pose_stamped.header = msg.header
+ pose_stamped.pose = target_pose
+
+ return pose_stamped
+
+
+def get_diff_for_person(pose):
+
+ if isinstance(pose, Pose):
+ x = pose.position.x
+ y = pose.position.y
+ z = pose.position.z
+ elif isinstance(pose, PoseStamped):
+ x = pose.pose.position.x
+ y = pose.pose.position.y
+ z = pose.pose.position.z
+ else:
+ raise TypeError(
+ 'pose must be geometry_msgs.msg.Pose or geometry_msgs.msg.PoseStamped')
+
+ yaw = math.atan2(y, x)
+ try:
+ pitch = math.acos(z / math.sqrt(x**2 + y**2))
+ except ValueError:
+ pitch = 0
+ return pitch, yaw
+
+
+class SpotRosClient:
+
+ def __init__(self,
+ topicname_cmd_vel='/spot/cmd_vel',
+ topicname_body_pose='/spot/body_pose',
+ topicname_cable_connected='/spot/status/cable_connected',
+ topicname_current_node_id='/spot_behavior_manager_server/current_node_id',
+ topicname_laptop_percentage='/spot/status/laptop_battery_percentage',
+ topicname_battery_percentage='/spot/status/battery_percentage',
+ topicname_status_feedback='/spot/status/feedback',
+ topicname_status_power_state='/spot/status/power_state',
+ servicename_claim='/spot/claim',
+ servicename_release='/spot/release',
+ servicename_stop='/spot/stop',
+ servicename_self_right='/spot/self_right',
+ servicename_sit='/spot/sit',
+ servicename_stand='/spot/stand',
+ servicename_power_on='/spot/power_on',
+ servicename_power_off='/spot/power_off',
+ servicename_estop_hard='/spot/estop/hard',
+ servicename_estop_gentle='/spot/estop/gentle',
+ servicename_stair_mode='/spot/stair_mode',
+ servicename_locomotion_mode='/spot/locomotion_mode',
+ servicename_upload_graph='/spot/upload_graph',
+ servicename_list_graph='/spot/list_graph',
+ servicename_set_localization_fiducial='/spot/set_localization_fiducial',
+ servicename_set_localization_waypoint='/spot/set_localization_waypoint',
+ servicename_dock='/spot/dock',
+ servicename_undock='/spot/undock',
+ servicename_reset_current_node='/spot_behavior_manager_server/reset_current_node_id',
+ actionname_navigate_to='/spot/navigate_to',
+ actionname_trajectory='/spot/trajectory',
+ actionname_execute_behaviors='/spot_behavior_manager_server/execute_behaviors',
+ duration_timeout=0.05):
+
+ self.topicname_cable_connected = topicname_cable_connected
+ self.topicname_current_node_id = topicname_current_node_id
+ self.topicname_laptop_percentage = topicname_laptop_percentage
+ self.topicname_battery_percentage = topicname_battery_percentage
+ self.topicname_status_feedback = topicname_status_feedback
+ self.topicname_status_power_state = topicname_status_power_state
+
+ # Publishers
+ self._pub_cmd_vel = rospy.Publisher(
+ topicname_cmd_vel,
+ Twist,
+ queue_size=1
+ )
+ self._pub_body_pose = rospy.Publisher(
+ topicname_body_pose,
+ Pose,
+ queue_size=1
+ )
+ rospy.loginfo("Publisher initialization done.")
+
+ # wait for services
+ rospy.loginfo("Waiting all service available...")
+ try:
+ rospy.wait_for_service(servicename_claim, rospy.Duration(5))
+ rospy.wait_for_service(servicename_release, rospy.Duration(5))
+ rospy.wait_for_service(servicename_stop, rospy.Duration(5))
+ rospy.wait_for_service(servicename_self_right, rospy.Duration(5))
+ rospy.wait_for_service(servicename_sit, rospy.Duration(5))
+ rospy.wait_for_service(servicename_stand, rospy.Duration(5))
+ rospy.wait_for_service(servicename_power_on, rospy.Duration(5))
+ rospy.wait_for_service(servicename_power_off, rospy.Duration(5))
+ rospy.wait_for_service(servicename_estop_hard, rospy.Duration(5))
+ rospy.wait_for_service(servicename_estop_gentle, rospy.Duration(5))
+ rospy.wait_for_service(servicename_stair_mode, rospy.Duration(5))
+ rospy.wait_for_service(
+ servicename_locomotion_mode, rospy.Duration(5))
+ rospy.wait_for_service(servicename_upload_graph, rospy.Duration(5))
+ rospy.wait_for_service(servicename_list_graph, rospy.Duration(5))
+ rospy.wait_for_service(
+ servicename_set_localization_fiducial, rospy.Duration(5))
+ rospy.wait_for_service(
+ servicename_set_localization_waypoint, rospy.Duration(5))
+ rospy.wait_for_service(servicename_dock, rospy.Duration(5))
+ rospy.wait_for_service(servicename_undock, rospy.Duration(5))
+ rospy.wait_for_service(servicename_reset_current_node, rospy.Duration(5))
+ except rospy.ROSException as e:
+ rospy.logerr('Service unavaliable: {}'.format(e))
+
+ # Service Clients
+ self._srv_client_claim = rospy.ServiceProxy(
+ servicename_claim,
+ Trigger
+ )
+ self._srv_client_release = rospy.ServiceProxy(
+ servicename_release,
+ Trigger
+ )
+ self._srv_client_stop = rospy.ServiceProxy(
+ servicename_stop,
+ Trigger
+ )
+ self._srv_client_self_right = rospy.ServiceProxy(
+ servicename_self_right,
+ Trigger
+ )
+ self._srv_client_sit = rospy.ServiceProxy(
+ servicename_sit,
+ Trigger
+ )
+ self._srv_client_stand = rospy.ServiceProxy(
+ servicename_stand,
+ Trigger
+ )
+ self._srv_client_power_on = rospy.ServiceProxy(
+ servicename_power_on,
+ Trigger
+ )
+ self._srv_client_power_off = rospy.ServiceProxy(
+ servicename_power_off,
+ Trigger
+ )
+ self._srv_client_estop_hard = rospy.ServiceProxy(
+ servicename_estop_hard,
+ Trigger
+ )
+ self._srv_client_estop_gentle = rospy.ServiceProxy(
+ servicename_estop_gentle,
+ Trigger
+ )
+ self._srv_client_stair_mode = rospy.ServiceProxy(
+ servicename_stair_mode,
+ SetBool
+ )
+ self._srv_client_locomotion_mode = rospy.ServiceProxy(
+ servicename_locomotion_mode,
+ SetLocomotion
+ )
+ self._srv_client_upload_graph = rospy.ServiceProxy(
+ servicename_upload_graph,
+ UploadGraph
+ )
+ self._srv_client_list_graph = rospy.ServiceProxy(
+ servicename_list_graph,
+ ListGraph
+ )
+ self._srv_client_set_localization_fiducial = rospy.ServiceProxy(
+ servicename_set_localization_fiducial,
+ SetLocalizationFiducial
+ )
+ self._srv_client_set_localization_waypoint = rospy.ServiceProxy(
+ servicename_set_localization_waypoint,
+ SetLocalizationWaypoint
+ )
+ self._srv_client_dock = rospy.ServiceProxy(
+ servicename_dock,
+ Dock
+ )
+ self._srv_client_undock = rospy.ServiceProxy(
+ servicename_undock,
+ Trigger
+ )
+ self._srv_client_reset_current_node = rospy.ServiceProxy(
+ servicename_reset_current_node,
+ ResetCurrentNode
+ )
+
+ rospy.loginfo("Service initialization done.")
+
+ # Action Clients
+ self._actionclient_navigate_to = actionlib.SimpleActionClient(
+ actionname_navigate_to,
+ NavigateToAction
+ )
+ self._actionclient_trajectory = actionlib.SimpleActionClient(
+ actionname_trajectory,
+ TrajectoryAction
+ )
+ self._actionclient_execute_behaviors = actionlib.SimpleActionClient(
+ actionname_execute_behaviors,
+ NavigationAction
+ )
+
+ rospy.loginfo("Waiting actions available")
+ # wait for action
+ try:
+ self._actionclient_navigate_to.wait_for_server(rospy.Duration(5))
+ self._actionclient_trajectory.wait_for_server(rospy.Duration(5))
+ self._actionclient_execute_behaviors.wait_for_server(
+ rospy.Duration(5))
+ except rospy.ROSException as e:
+ rospy.logerr('Action unavaliable: {}'.format(e))
+
+ #
+ self.tf_buffer = tf2_ros.Buffer()
+ self.tf_listener = tf2_ros.TransformListener(self.tf_buffer)
+
+ rospy.loginfo("Action initialization done.")
+
+ rospy.loginfo("Initialization done")
+
+ def get_laptop_percepntage(self):
+ try:
+ msg = rospy.wait_for_message(
+ self.topicname_laptop_percentage, Float32, timeout=rospy.Duration(5))
+ return msg.data
+ except rospy.ROSException as e:
+ rospy.logwarn('{}'.format(e))
+ return None
+
+ def get_battery_percepntage(self):
+ try:
+ msg = rospy.wait_for_message(
+ self.topicname_battery_percentage, Float32, timeout=rospy.Duration(5))
+ return msg.data
+ except rospy.ROSException as e:
+ rospy.logwarn('{}'.format(e))
+ return None
+
+ def get_robot_pose(self):
+ try:
+ frame_odom_to_base = tf2_geometry_msgs.transform_to_kdl(
+ self.tf_buffer.lookup_transform(
+ 'odom',
+ 'base_link',
+ rospy.Time()
+ )
+ )
+ except (tf2_ros.LookupException, tf2_ros.ConnectivityException, tf2_ros.ExtrapolationException) as e:
+ return None
+ return frame_odom_to_base
+
+ def go_pose(self, target_frame, timeout = None):
+ self.trajectory(
+ target_frame.p[0],
+ target_frame.p[1],
+ target_frame.M.GetRPY()[2],
+ duration=timeout,
+ blocking=True
+ )
+
+ def is_connected(self):
+ try:
+ msg = rospy.wait_for_message(
+ self.topicname_cable_connected, Bool, timeout=rospy.Duration(5))
+ return msg.data
+ except rospy.ROSException as e:
+ rospy.logwarn('{}'.format(e))
+ return None
+
+ def is_sitting(self):
+ try:
+ msg = rospy.wait_for_message(
+ self.topicname_status_feedback, Feedback, timeout=rospy.Duration(5))
+ return msg.sitting
+ except rospy.ROSException as e:
+ rospy.logwarn('{}'.format(e))
+ return None
+
+ def is_standing(self):
+ try:
+ msg = rospy.wait_for_message(
+ self.topicname_status_feedback, Feedback, timeout=rospy.Duration(5))
+ return msg.standing
+ except rospy.ROSException as e:
+ rospy.logwarn('{}'.format(e))
+ return None
+
+ def is_powered_on(self):
+ try:
+ msg = rospy.wait_for_message(
+ self.topicname_status_power_state, PowerState, timeout=rospy.Duration(5))
+ if msg.motor_power_state == PowerState.STATE_ON:
+ return True
+ else:
+ return False
+ except rospy.ROSException as e:
+ rospy.logwarn('{}'.format(e))
+ return None
+
+ def pub_cmd_vel(self, vx, vy, vtheta):
+ msg = Twist()
+ msg.linear.x = vx
+ msg.linear.y = vy
+ msg.angular.z = vtheta
+ self._pub_cmd_vel.publish(msg)
+
+ def pub_body_pose(self, height, orientation):
+ msg = Pose()
+ msg.position.z = height
+ msg.orientation = orientation
+ self._pub_body_pose.publish(msg)
+
+ def claim(self):
+ res = self._srv_client_claim(TriggerRequest())
+ return res.success, res.message
+
+ def release(self):
+ res = self._srv_client_release(TriggerRequest())
+ return res.success, res.message
+
+ def stop(self):
+ res = self._srv_client_stop(TriggerRequest())
+ return res.success, res.message
+
+ def self_right(self):
+ res = self._srv_client_self_right(TriggerRequest())
+ return res.success, res.message
+
+ def sit(self):
+ res = self._srv_client_sit(TriggerRequest())
+ return res.success, res.message
+
+ def stand(self):
+ res = self._srv_client_stand(TriggerRequest())
+ return res.success, res.message
+
+ def power_on(self):
+ res = self._srv_client_power_on(TriggerRequest())
+ return res.success, res.message
+
+ def power_off(self):
+ res = self._srv_client_power_off(TriggerRequest())
+ return res.success, res.message
+
+ def estop_hard(self):
+ res = self._srv_client_estop_hard(TriggerRequest())
+ return res.success, res.message
+
+ def estop_gentle(self):
+ res = self._srv_client_estop_gentle(TriggerRequest())
+ return res.success, res.message
+
+ def stair_mode(self, stair_mode):
+ res = self._srv_client_stair_mode(SetBoolRequest(data=stair_mode))
+ return res.success, res.message
+
+ def locomotion_mode(self, locomotion_mode):
+ res = self._srv_client_locomotion_mode(
+ SetLocomotionRequest(locomotion_mode=locomotion_mode))
+ return res.success, res.message
+
+ def upload_graph(self, upload_filepath):
+ res = self._srv_client_upload_graph(
+ UploadGraphRequest(upload_filepath=upload_filepath))
+ return res.success, res.message
+
+ def list_graph(self):
+ res = self._srv_client_list_graph(ListGraphRequest())
+ return res.waypoint_ids
+
+ def set_localization_fiducial(self):
+ res = self._srv_client_set_localization_fiducial(
+ SetLocalizationFiducialRequest())
+ return res.success, res.message
+
+ def set_localization_waypoint(self, waypoint_id):
+ res = self._srv_client_set_localization_waypoint(
+ SetLocalizationWaypointRequest(waypoint_id=waypoint_id))
+ return res.success, res.message
+
+ def dock(self, dock_id):
+ req = DockRequest()
+ req.dock_id = dock_id
+ self.pub_body_pose(0, Quaternion(0, 0, 0, 1.0))
+ self.sit()
+ self.stand()
+ res = self._srv_client_dock(req)
+ return res.success, res.message
+
+ def undock(self):
+ self.power_on()
+ res = self._srv_client_undock(TriggerRequest())
+ if not self.is_powered_on():
+ self.power_on()
+ if not self.is_standing():
+ self.stand()
+ return res.success, res.message
+
+ def auto_dock(self, dock_id, home_node_id='eng2_73B2_dock'):
+ res = self.execute_behaviors(home_node_id)
+ if not res.success:
+ return res.success, res.message
+ success, message = self.dock(dock_id)
+ return success, message
+
+ def auto_undock(self):
+ self.sit()
+ self.power_off()
+ self.release()
+ self.claim()
+ self.power_on()
+ if self.is_connected():
+ self.undock()
+ else:
+ self.stand()
+
+ def navigate_to(self,
+ id_navigate_to,
+ velocity_limit=(1.0, 1.0, 1.0),
+ blocking=False):
+ goal = NavigateToGoal()
+ goal.id_navigate_to = id_navigate_to
+ goal.velocity_limit.linear.x = float(velocity_limit[0])
+ goal.velocity_limit.linear.y = float(velocity_limit[1])
+ goal.velocity_limit.angular.z = float(velocity_limit[2])
+ self._actionclient_navigate_to.send_goal(goal)
+ if blocking:
+ self._actionclient_navigate_to.wait_for_result()
+ return self._actionclient_navigate_to.get_result()
+
+ def wait_for_navigate_to_result(self, duration=rospy.Duration(0)):
+ return self._actionclient_navigate_to.wait_for_result(duration)
+
+ def get_navigate_to_result(self):
+ return self._actionclient_navigate_to.get_result()
+
+ def cancel_navigate_to(self):
+ self._actionclient_navigate_to.cancel_all_goals()
+
+ def get_current_node(self):
+ try:
+ msg = rospy.wait_for_message(
+ self.topicname_current_node_id, String, timeout=rospy.Duration(5))
+ return msg.data
+ except rospy.ROSException as e:
+ rospy.logwarn('{}'.format(e))
+ return None
+
+ def execute_behaviors(self, target_node_id, blocking=True):
+ goal = NavigationGoal()
+ goal.target_node_id = target_node_id
+ self._actionclient_execute_behaviors.send_goal(goal)
+ if blocking:
+ self._actionclient_execute_behaviors.wait_for_result()
+ return self._actionclient_execute_behaviors.get_result()
+
+ def wait_execute_behaviors_result(self, duration=None):
+ if duration is None:
+ return self._actionclient_execute_behaviors.wait_for_result()
+ else:
+ return self._actionclient_execute_behaviors.wait_for_result(duration=duration)
+
+ def get_execute_behaviors_result(self):
+ return self._actionclient_execute_behaviors.get_result()
+
+ def reset_current_node(self, node):
+ req = ResetCurrentNodeRequest()
+ req.current_node_id = node
+ res = self._srv_client_reset_current_node(req)
+ return res.success
+
+ def list_nodes(self):
+ return list(rospy.get_param("/spot_behavior_manager_server/map/nodes", {}).keys())
+
+ # \brief call trajectory service
+ # \param x x value of the target position [m]
+ # \param x y value of the target position [m]
+ # \param theta theta value of the target position [rad]
+ # \param duration duration of trajectory command [secs]
+ def trajectory(self, x, y, theta, duration=None, blocking=False):
+ rotation = PyKDL.Rotation.RotZ(theta)
+ goal = TrajectoryGoal()
+ goal.target_pose.header.frame_id = 'body'
+ goal.target_pose.pose.position.x = x
+ goal.target_pose.pose.position.y = y
+ goal.target_pose.pose.orientation.x = rotation.GetQuaternion()[0]
+ goal.target_pose.pose.orientation.y = rotation.GetQuaternion()[1]
+ goal.target_pose.pose.orientation.z = rotation.GetQuaternion()[2]
+ goal.target_pose.pose.orientation.w = rotation.GetQuaternion()[3]
+ if duration is None:
+ goal.duration.data = rospy.Duration(math.sqrt(x**2 + y**2)/0.5)
+ else:
+ goal.duration.data = rospy.Duration(duration)
+ self._actionclient_trajectory.send_goal(goal)
+ if blocking:
+ self._actionclient_trajectory.wait_for_result()
diff --git a/jsk_spot_robot/spoteus/.gitignore b/jsk_spot_robot/spoteus/.gitignore
new file mode 100644
index 0000000000..a1fe640a20
--- /dev/null
+++ b/jsk_spot_robot/spoteus/.gitignore
@@ -0,0 +1,3 @@
+spot.l
+spot.urdf
+spot.dae
diff --git a/jsk_spot_robot/spoteus/CMakeLists.txt b/jsk_spot_robot/spoteus/CMakeLists.txt
new file mode 100644
index 0000000000..2d49a15d63
--- /dev/null
+++ b/jsk_spot_robot/spoteus/CMakeLists.txt
@@ -0,0 +1,58 @@
+cmake_minimum_required(VERSION 2.8.3)
+project(spoteus)
+
+## Find catkin macros and libraries
+## if COMPONENTS list like find_package(catkin REQUIRED COMPONENTS xyz)
+## is used, also find other catkin packages
+find_package(catkin REQUIRED COMPONENTS
+ collada_urdf
+ roseus
+ euscollada
+)
+find_package(spot_description) # Just in case when description is not released. Avoid compile failing
+
+catkin_package()
+
+if(NOT spot_description_FOUND)
+ message(WARNING "spot_description is not found, so skip generating spot.l")
+ message(WARNING "Install spot_description from https://github.com/clearpathrobotics/spot_ros")
+ return()
+endif()
+
+
+###########
+## Build ##
+###########
+if(EXISTS ${spot_description_SOURCE_PREFIX}/urdf)
+ set(_spot_urdf ${spot_description_SOURCE_PREFIX}/urdf)
+else()
+ set(_spot_urdf ${spot_description_PREFIX}/share/spot_description/urdf)
+endif()
+set(_urdf_to_collada ${collada_urdf_PREFIX}/lib/collada_urdf/urdf_to_collada)
+set(_collada2eus ${euscollada_PREFIX}/lib/euscollada/collada2eus)
+
+message("spot_urdf: ${_spot_urdf}")
+message("urdf_to_collada: ${_urdf_to_collada}")
+message("collada2eus: ${_collada2eus}")
+
+add_custom_command(OUTPUT ${PROJECT_SOURCE_DIR}/spot.urdf
+ COMMAND xacro ${_spot_urdf}/spot.urdf.xacro > ${PROJECT_SOURCE_DIR}/spot.urdf
+ DEPENDS ${_spot_urdf}/spot.urdf.xacro)
+
+add_custom_command(OUTPUT ${PROJECT_SOURCE_DIR}/spot.l
+ COMMAND echo "${_collada2eus} spot.urdf spot.l"
+ COMMAND ${_collada2eus} ${PROJECT_SOURCE_DIR}/spot.urdf ${PROJECT_SOURCE_DIR}/spot.yaml ${PROJECT_SOURCE_DIR}/spot.l
+ DEPENDS ${PROJECT_SOURCE_DIR}/spot.urdf ${PROJECT_SOURCE_DIR}/spot.yaml ${_collada2eus})
+add_custom_target(compile_spot ALL DEPENDS ${PROJECT_SOURCE_DIR}/spot.l)
+
+
+install(DIRECTORY euslisp test
+ DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION}
+ USE_SOURCE_PERMISSIONS)
+
+install(FILES spot.l spot-interface.l spot-util.l spot.yaml DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION})
+
+if(CATKIN_ENABLE_TESTING)
+ find_package(catkin REQUIRED COMPONENTS rostest)
+ add_rostest(test/test-spot.test)
+endif()
diff --git a/jsk_spot_robot/spoteus/demo/sample_basics.l b/jsk_spot_robot/spoteus/demo/sample_basics.l
new file mode 100755
index 0000000000..fcd8910854
--- /dev/null
+++ b/jsk_spot_robot/spoteus/demo/sample_basics.l
@@ -0,0 +1,80 @@
+#!/usr/bin/env roseus
+
+(load "package://spoteus/spot-interface.l")
+
+(spot-init nil) ;; do not create-viewer
+
+;; power on
+(send *ri* :claim)
+(send *ri* :power-on)
+
+(send *ri* :stand)
+(ros::duration-sleep 1)
+
+;; states
+(format t "(send *ri* :state :metrics) : ~A~%" (send *ri* :state :metrics))
+(format t "(send *ri* :state :leases) : ~A~%" (send *ri* :state :leases))
+(format t "(send *ri* :state :estop) : ~A~%" (send *ri* :state :estop))
+(format t "(send *ri* :state :wifi) : ~A~%" (send *ri* :state :wifi))
+(format t "(send *ri* :state :power-state) : ~A~%" (send *ri* :state :power-state))
+(format t "(send *ri* :state :battery-faults) : ~A~%" (send *ri* :state :battery-faults))
+(format t "(send *ri* :state :system-faults) : ~A~%" (send *ri* :state :system-faults))
+(format t "(send *ri* :state :feedback) : ~A~%" (send *ri* :state :feedback))
+
+;; basic services
+(format t "Testing Basic Functionality~%")
+(send *ri* :sit)
+(ros::duration-sleep 3)
+
+(send *ri* :power-off)
+(ros::duration-sleep 3)
+
+(send *ri* :release)
+(ros::duration-sleep 3)
+
+(send *ri* :claim)
+(ros::duration-sleep 3)
+
+(send *ri* :power-on)
+(ros::duration-sleep 3)
+
+(send *ri* :stand)
+(ros::duration-sleep 5)
+
+;; cmd-vel
+(format t "Testing cmd-vel~%")
+(setq end-time (ros::time+ (ros::time 10) (ros::time-now)))
+(while (ros::time< (ros::time-now) end-time)
+ (send *ri* :go-velocity 0 0 0.8)
+ )
+
+(setq end-time (ros::time+ (ros::time 10) (ros::time-now)))
+(while (ros::time< (ros::time-now) end-time)
+ (send *ri* :go-velocity 0 0 -0.8)
+ )
+
+;; body-pose
+(format t "Testing body-pose~%")
+(send *ri* :body-pose '(0 0.2 0))
+(ros::duration-sleep 1)
+(send *ri* :body-pose '(0 -0.2 0))
+(ros::duration-sleep 1)
+(send *ri* :body-pose '(0 0 0.2))
+(ros::duration-sleep 1)
+(send *ri* :body-pose '(0 0 -0.2))
+(ros::duration-sleep 1)
+(send *ri* :body-pose '(0.1 0 0))
+(ros::duration-sleep 1)
+(send *ri* :body-pose '(-0.1 0 0))
+(ros::duration-sleep 1)
+(send *ri* :body-pose '(0 0 0))
+(ros::duration-sleep 1)
+
+;; go pos
+(format t "Testing go pos")
+(send *ri* :go-pos 1 0)
+(send *ri* :go-pos 0 0 90)
+(send *ri* :go-pos 0 1 -90)
+
+;;
+(exit 1)
diff --git a/jsk_spot_robot/spoteus/demo/sample_go_to_spot.l b/jsk_spot_robot/spoteus/demo/sample_go_to_spot.l
new file mode 100755
index 0000000000..e623800d64
--- /dev/null
+++ b/jsk_spot_robot/spoteus/demo/sample_go_to_spot.l
@@ -0,0 +1,19 @@
+#!/usr/bin/env roseus
+
+(load "package://spoteus/spot-interface.l")
+
+(spot-init)
+(send *ri* :stand)
+;; if dock is used
+;; (setq dock-id (ros::get-param "~dock_id" 520))
+;; (send *ri* :undock)
+
+;;(send *ri* :go-to-spot "eng2_7FElevator")
+(send *ri* :go-to-spot "eng2_2FElevator")
+(send *ri* :speak-jp "こんにちは" :wait t)
+(send *ri* :speak-en "hello" :wait t)
+(send *ri* :go-to-spot "eng2_73B2")
+
+(send *ri* :sit)
+(send *ri* :stand)
+;; (send *ri* :dock dock-id)
diff --git a/jsk_spot_robot/spoteus/demo/sample_navigate_to.l b/jsk_spot_robot/spoteus/demo/sample_navigate_to.l
new file mode 100755
index 0000000000..81a9b58e1e
--- /dev/null
+++ b/jsk_spot_robot/spoteus/demo/sample_navigate_to.l
@@ -0,0 +1,38 @@
+#!/usr/bin/env roseus
+
+;;
+;; This script is for demonstration of GraphNav interface with euslisp.
+;; By default, it is assumed that Spot is at the entrance of 73B2 and headed to the AR marker on the door.
+;;
+
+(load "package://spoteus/spot-interface.l")
+
+(spot-init nil) ;; do not create-viewer
+
+(setq *path* (ros::get-param "~path" (format nil "~A/autowalk/eng2_73B2_to_81C1.walk" (ros::rospack-find "spot_autowalk_data"))))
+(setq *init-waypoint* (floor (ros::get-param "~init_waypoint" 0)))
+(setq *upload* (ros::get-param "~upload" t))
+
+;; Upload graphnav files to the robot.
+(if *upload* (send *ri* :upload-path *path*))
+
+;; Localize the robot in the map
+(ros::ros-info "initialize position with waypoint of ~A" *init-waypoint*)
+(send *ri* :initial-localization-waypoint *init-waypoint*)
+;; you can also use following command to initialize localization if you start from 73B2
+;; (send *ri* :initial-localization-fiducial)
+;; the difference is, :initial-localization-waypoint can initialize with any waypoint, meaning you can start from arbitary wapoint, e.g., -1 -> 0, 1 -> -1
+
+(ros::ros-info "ready go to 81C1?")
+(if (y-or-n-p) t (exit))
+
+;; go to 81C1
+(send *ri* :navigate-to -1)
+
+(ros::ros-info "ready go back to 73B2?")
+(if (y-or-n-p) t (exit))
+
+;; go back to 73B2
+(send *ri* :navigate-to 0)
+
+(send *ri* :sit)
diff --git a/jsk_spot_robot/spoteus/demo/sample_visualization.l b/jsk_spot_robot/spoteus/demo/sample_visualization.l
new file mode 100755
index 0000000000..1d5e539adc
--- /dev/null
+++ b/jsk_spot_robot/spoteus/demo/sample_visualization.l
@@ -0,0 +1,23 @@
+#!/usr/bin/env roseus
+
+;;
+;; This script is for demonstration of visualization of spot's angle vector and global pose with irtviewer
+;;
+
+(load "package://spoteus/spot-interface.l")
+
+(spot-init t) ;; create-viewer
+(send *irtviewer* :draw-floor t)
+
+;; if not power-on, power on
+;; if not stand, stand
+
+(do-until-key
+ ;; update body posture
+ (send *spot* :angle-vector (send *ri* :state :angle-vector))
+ ;;
+ (send *spot* :move-to (send *ri* :state :worldcoords) :world)
+ (send *irtviewer* :look1 (send *spot* :worldpos))
+ (send *irtviewer* :draw-objects)
+ (x::window-main-one)
+ )
diff --git a/jsk_spot_robot/spoteus/package.xml b/jsk_spot_robot/spoteus/package.xml
new file mode 100644
index 0000000000..258253ca59
--- /dev/null
+++ b/jsk_spot_robot/spoteus/package.xml
@@ -0,0 +1,29 @@
+
+
+ spoteus
+ 1.1.0
+ The spoteus package
+
+ Kei Okada
+ Yoshiki Obinata
+ BSD
+ Kei Okada
+ Yoshiki Obinata
+
+ catkin
+
+ collada_urdf
+ euscollada
+ rostest
+ roseus
+ pr2eus
+ spot_description
+
+ pr2eus
+ roseus
+ spot_msgs
+ std_srvs
+
+
+
+
diff --git a/jsk_spot_robot/spoteus/spot-interface.l b/jsk_spot_robot/spoteus/spot-interface.l
new file mode 100644
index 0000000000..f57df8cb74
--- /dev/null
+++ b/jsk_spot_robot/spoteus/spot-interface.l
@@ -0,0 +1,578 @@
+(ros::roseus "spot")
+
+(require "package://spoteus/spot-utils.l")
+(require "package://pr2eus/robot-interface.l")
+
+(ros::roseus-add-srvs "std_srvs")
+(ros::roseus-add-msgs "spot_msgs")
+(ros::roseus-add-srvs "spot_msgs")
+(ros::roseus-add-srvs "control_msgs")
+
+(defun call-trigger-service (srvname &key (wait nil))
+ "Call std_srv/Trigger service"
+ (let (r)
+ (when (send *ri* :simulation-modep)
+ (ros::ros-warn "call-trigger-service (~A)" srvname)
+ (return-from call-trigger-service t))
+ (if wait (ros::wait-for-service srvname))
+ (setq r (ros::service-call srvname (instance std_srvs::TriggerRequest :init)))
+ (ros::ros-debug "Call \"~A\" returns \"~A\"" srvname (send r :message))
+ (send r :success)))
+
+(defun call-set-bool-service (srvname data &key (wait nil))
+ "Call std_srv/Trigger service"
+ (let (r)
+ (when (send *ri* :simulation-modep)
+ (ros::ros-warn "call-set-bool-service (~A) ~A" srvname data)
+ (return-from call-set-bool-service t))
+ (if wait (ros::wait-for-service srvname))
+ (setq r (ros::service-call srvname (instance std_srvs::SetBoolRequest :init :data data)))
+ (ros::ros-info "Call \"~A\" returns \"~A\"" srvname (send r :message))
+ (send r :success)))
+
+(defun call-set-locomotion-service (srvname locomotion_hint &key (wait nil))
+ "Call spot_msgs/SetLocomotion service"
+ (let (r)
+ (when (send *ri* :simulation-modep)
+ (ros::ros-warn "call-set-locomotion-service (~A) ~A" srvname locomotion_hint)
+ (return-from call-set-locomotion-service t))
+ (if wait (ros::wait-for-service srvname))
+ (setq r (ros::service-call srvname (instance spot_msgs::SetLocomotionRequest :init :locomotion_mode locomotion_hint)))
+ (ros::ros-info "Call \"~A\" returns \"~A\"" srvname (send r :message))
+ (send r :success)))
+
+(defun call-dock-service (srvname dock_id &key (wait nil))
+ "Call spot_msgs/Dock service"
+ (let (r)
+ (when (send *ri* :simulation-modep)
+ (ros::ros-warn "call-dock-service (~A) ~A" srvname dock_id)
+ (return-from call-dock-service t))
+ (if wait (ros::wait-for-service srvname))
+ (setq r (ros::service-call srvname (instance spot_msgs::DockRequest :init :dock_id dock_id)))
+ (ros::ros-info "Call \"~A\" returns \"~A\"" srvname (send r :message))
+ (send r :success)))
+
+(defclass spot-interface
+ :super robot-move-base-interface
+ :slots (trajectory-cmd-action pick-object-in-image-client pick-object-in-image-feedback-msg)
+ )
+
+(defmethod spot-interface
+ (:init
+ (&rest args &key (trajectory-cmd-action-name "/spot/trajectory") &allow-other-keys)
+ (prog1
+ (send-super* :init :robot spot-robot :base-frame-id "base_link" :odom-topic "/odom_combined" :base-controller-action-name nil args)
+ ;; check if spot_ros/driver.launch started
+ (unless (or (send self :simulation-modep) (ros::wait-for-service "/spot/claim" 5))
+ (ros::ros-error "could not communicate with robot, may be forget to roslaunch spot_driver driver.launch, or did not power on the robot"))
+ ;; http://www.clearpathrobotics.com/assets/guides/melodic/spot-ros/ros_usage.html#view-the-robot
+ ;; spot_msgs version 0.0.0
+ (ros::subscribe "/spot/status/metrics" spot_msgs::Metrics #'send self :spot-status-metrics-callback :groupname groupname)
+ (ros::subscribe "/spot/status/leases" spot_msgs::LeaseArray #'send self :spot-status-leases-callback :groupname groupname)
+ (ros::subscribe "/spot/status/feet" spot_msgs::FootStateArray #'send self :spot-status-feet-callback :groupname groupname)
+ (ros::subscribe "/spot/status/estop" spot_msgs::EStopStateArray #'send self :spot-status-estop-callback :groupname groupname)
+ (ros::subscribe "/spot/status/wifi" spot_msgs::WiFiState #'send self :spot-status-wifi-callback :groupname groupname)
+ (ros::subscribe "/spot/status/manipulator_state" spot_msgs::ManipulatorState #'send self :spot-status-manipulator-state-callback :groupname groupname)
+ (ros::subscribe "/spot/status/power_state" spot_msgs::PowerState #'send self :spot-status-power-state-callback :groupname groupname)
+ (ros::subscribe "/spot/status/battery_states" spot_msgs::BatteryStateArray #'send self :spot-status-battery-states-callback :groupname groupname)
+ (ros::subscribe "/spot/status/behavior_faults" spot_msgs::BehaviorFaultState #'send self :spot-status-behavior-faults-callback :groupname groupname)
+ (ros::subscribe "/spot/status/system_faults" spot_msgs::SystemFaultState #'send self :spot-status-system-faults-callback :groupname groupname)
+ (ros::subscribe "/spot/status/feedback" spot_msgs::Feedback #'send self :spot-feedback-callback :groupname groupname)
+ (setq trajectory-cmd-action (instance ros::simple-action-client :init
+ trajectory-cmd-action-name spot_msgs::TrajectoryAction
+ :groupname groupname))
+ (setq pick-object-in-image-client (instance ros::simple-action-client :init
+ "/spot/pick_object_in_image" spot_msgs::PickObjectInImageAction))
+ ))
+ ;; (:default-controller ()
+ ;; (append
+ ;; (send self :arm-controller)
+ ;; (send self :dummy-controller)
+ ;; ))
+ (:default-controller () (send self :arm-controller))
+ (:arm-controller ()
+ (list
+ (list
+ (cons :controller-action "spot/arm_controller/follow_joint_trajectory")
+ (cons :controller-state "spot/arm_controller/follow_joint_trajectory/state")
+ (cons :action-type control_msgs::FollowJointTrajectoryAction)
+ (cons :joint-names (send-all (send robot :arm :joint-list) :name))
+ )))
+ (:set-impedance-param
+ (&key (linear-stiffness #f(500 500 500))
+ (rotational-stiffness #f(60 60 60))
+ (linear-damping #f(2.5 2.5 2.5))
+ (rotational-damping #f(1.0 1.0 1.0)))
+ "X is up, Z is forward"
+ (let (m r)
+ (labels
+ ((v2v (v) (instance geometry_msgs::Vector3 :init :x (elt v 0) :y (elt v 1) :z (elt v 2))))
+ (setq m (instance spot_msgs::SetArmImpedanceParamsRequest :init
+ :linear_stiffness (v2v linear-stiffness)
+ :rotational_stiffness (v2v rotational-stiffness)
+ :linear_damping (v2v linear-damping)
+ :rotational_damping (v2v rotational-damping)))
+ (setq r (ros::service-call "/spot/arm_impedance_parameters" m))
+ (send r :success))))
+ (:unstow-arm () (call-trigger-service "/spot/unstow_arm"))
+ (:stow-arm () (call-trigger-service "/spot/stow_arm"))
+ (:gripper-open () (call-trigger-service "/spot/gripper_open"))
+ (:gripper-close () (call-trigger-service "/spot/gripper_close"))
+ (:start-grasp
+ ()
+ (let (p s)
+ (send self :gripper-close)
+ (setq p (send *ri* :state :manipulator-state-gripper-open-percentage)
+ s (send *ri* :state :manipulator-state-is-gripper-holding-item))
+ (ros::ros-info "gripper-open-percentage ~A" p)
+ (ros::ros-info "manipulator-state-is-gripper-holding-item ~A" s)
+ s))
+ (:stop-grasp
+ ()
+ (let (p s)
+ (send self :gripper-open)
+ (setq p (send *ri* :state :manipulator-state-gripper-open-percentage)
+ s (send *ri* :state :manipulator-state-is-gripper-holding-item))
+ (ros::ros-info "gripper-open-percentage ~A" p)
+ (ros::ros-info "manipulator-state-is-gripper-holding-item ~A" s)
+ s))
+ (:pick-object-in-image
+ (image-source x y &optional (max-duration 15))
+ (let ((goal (instance spot_msgs::PickObjectInImageActionGoal :init)))
+ (print (list image-source x y max-duration))
+ (send goal :goal :image_source image-source)
+ (send goal :goal :center (instance geometry_msgs::Point :init :x x :y y))
+ (send goal :goal :max_duration (instance ros::duration :init max-duration))
+ (send pick-object-in-image-client :send-goal goal :feedback-cb `(lambda (msg) (send ,self :pick-object-in-image-feedback-cb msg)))
+ ))
+ (:pick-object-in-image-feedback-cb
+ (msg)
+ (setq pick-object-in-image-feedback-msg msg))
+ (:pick-object-in-image-feedback-msg
+ (&rest args)
+ (forward-message-to pick-object-in-image-feedback-msg args))
+ (:pick-object-in-image-wait-for-result
+ ()
+ (send pick-object-in-image-client :wait-for-result)
+ (send pick-object-in-image-client :get-result))
+ (:pick-object-in-image-get-state
+ ()
+ (send pick-object-in-image-client :get-state))
+ ;; (:dummy-controller ()
+ ;; (list
+ ;; (list
+ ;; (cons :controller-action "spot/dummy_controller/follow_joint_trajectory")
+ ;; (cons :controller-state "spot/dummy_controller/follow_joint_trajectory/state")
+ ;; (cons :action-type control_msgs::FollowJointTrajectoryAction)
+ ;; (cons :joint-names (send-all (set-difference (send robot :joint-list) (send robot :arm :joint-list)) :name))
+ ;; )))
+ (:spot-status-metrics-callback
+ (msg)
+ (send self :set-robot-state1 :metrics-distance (send msg :distance))
+ (send self :set-robot-state1 :metrics-gaint-cycles (send msg :gait_cycles))
+ (send self :set-robot-state1 :metrics-time-moving (send (send msg :time_moving) :to-sec))
+ (send self :set-robot-state1 :metrics-electric-power (send (send msg :electric_power) :to-sec)))
+ (:spot-status-leases-callback
+ (msg)
+ (dolist (resource (send msg :resources))
+ (let ((r (string-upcase (send resource :resource))))
+ (send self :set-robot-state1 (intern (format nil "LEASES-~A-RESOURCE" r) *keyword-package*)
+ (send resource :lease :resource))
+ (send self :set-robot-state1 (intern (format nil "LEASES-~A-EPOCH" r) *keyword-package*)
+ (send resource :lease :epoch))
+ (send self :set-robot-state1 (intern (format nil "LEASES-~A-SEQUENCE" r) *keyword-package*)
+ (send resource :lease :sequence))
+ (send self :set-robot-state1 (intern (format nil "LEASES-~A-CLIENT-NAME" r) *keyword-package*)
+ (send resource :lease_owner :client_name))
+ (send self :set-robot-state1 (intern (format nil "LEASES-~A-USER-NAME" r) *keyword-package*)
+ (send resource :lease_owner :user_name)))))
+ (:spot-status-feet-callback
+ (msg)
+ (send self :set-robot-state1 :feet
+ (mapcar #'(lambda (state)
+ (list (cons :foot-position-rt-body (ros::tf-point->pos (send state :foot_position_rt_body)))
+ (cons :contact (case (send state :contact) (0 'unknown) (1 'made) (2 'lost))))) (send msg :states))))
+ (:spot-status-estop-callback
+ (msg)
+ (dolist (state (send msg :estop_states))
+ (let ((s (string-upcase (substitute #\- #\_ (send state :name)))))
+ (send self :set-robot-state1 (intern (format nil "ESTOP-~A-NAME" s) *keyword-package*)
+ (send state :name))
+ (send self :set-robot-state1 (intern (format nil "ESTOP-~A-TYPE" s) *keyword-package*)
+ (case (send state :type) (0 'unknown) (1 'hardware) (2 'software)))
+ (send self :set-robot-state1 (intern (format nil "ESTOP-~A-STATE" s) *keyword-package*)
+ (case (send state :state) (0 'unknown) (1 'estopped) (2 'not-estopped)))
+ (send self :set-robot-state1 (intern (format nil "ESTOP-~A-STATE-DESCRIPTION" s) *keyword-package*)
+ (send state :state_description)))))
+ (:spot-status-wifi-callback
+ (msg)
+ (send self :set-robot-state1 :wifi-current-mode
+ (case (send msg :current_mode)
+ (0 'unknown) (1 'access-point) (2 'client)))
+ (send self :set-robot-state1 :wifi-essid (send msg :essid)))
+ (:spot-status-manipulator-state-callback
+ (msg)
+ (send self :set-robot-state1 :manipulator-state-gripper-open-percentage (send msg :gripper_open_percentage))
+ (send self :set-robot-state1 :manipulator-state-is-gripper-holding-item (send msg :is_gripper_holding_item))
+ (send self :set-robot-state1 :manipulator-state-estimated-end-effector-force-in-hand
+ (let ((m (send msg :estimated_end_effector_force_in_hand)))
+ (float-vector (send m :x) (send m :y) (send m :z))))
+ (send self :set-robot-state1 :manipulator-state-stow-state
+ (case (send msg :stow_state) (0 'unknown) (1 'stowed) (2 'deployed)))
+ (send self :set-robot-state1 :manipulator-state-velocity-of-hand-in-vision
+ (let ((m (send msg :velocity_of_hand_in_vision)))
+ (float-vector (send m :linear :x) (send m :linear :y) (send m :linear :z)
+ (send m :angular :x) (send m :angular :y) (send m :angular :z))))
+ (send self :set-robot-state1 :manipulator-state-velocity-of-hand-in-odom
+ (let ((m (send msg :velocity_of_hand_in_odom)))
+ (float-vector (send m :linear :x) (send m :linear :y) (send m :linear :z)
+ (send m :angular :x) (send m :angular :y) (send m :angular :z))))
+ (send self :set-robot-state1 :manipulator-carry-state
+ (case (send msg :carry_state) (0 'unknown) (1 'not-carriable) (2 'carriable) (3 'carriable-and-stowable)))
+ )
+ (:spot-status-power-state-callback
+ (msg)
+ (send self :set-robot-state1 :power-state-motor-power-state
+ (case (send msg :motor_power_state)
+ (0 'unknown) (1 'off) (2 'on) (3 'powering-on) (4 'powering-off) (5 'error)))
+ (send self :set-robot-state1 :power-state-shore-power-state
+ (case (send msg :shore_power_state)
+ (0 'unknown-shore-power) (1 'on-shore-power) (2 'off-shore-power)))
+ (send self :set-robot-state1 :power-state-locomotion-charge-percentage (send msg :locomotion_charge_percentage))
+ (send self :set-robot-state1 :power-state-locomotion-estimated-runtime (send (send msg :locomotion_estimated_runtime) :to-sec)))
+ (:spot-status-battery-states-callback
+ (msg)
+ (dolist (state (send msg :battery_states))
+ (let ((i 1))
+ (send self :set-robot-state1 (intern (format nil "BATTERY-STATES-~A-IDENTIFIER" i) *keyword-package*)
+ (send state :identifier))
+ (send self :set-robot-state1 (intern (format nil "BATTERY-STATES-~A-CHARGE-PERCENTAGE" i) *keyword-package*)
+ (send state :charge_percentage))
+ (send self :set-robot-state1 (intern (format nil "BATTERY-STATES-~A-ESTIMATED-RUNTIME" i) *keyword-package*)
+ (send (send state :estimated_runtime) :to-sec))
+ (send self :set-robot-state1 (intern (format nil "BATTERY-STATES-~A-CURRENT" i) *keyword-package*)
+ (send state :current))
+ (send self :set-robot-state1 (intern (format nil "BATTERY-STATES-~A-VOLTAGE" i) *keyword-package*)
+ (send state :voltage))
+ (send self :set-robot-state1 (intern (format nil "BATTERY-STATES-~A-TEMPERATURES" i) *keyword-package*)
+ (send state :temperatures))
+ (send self :set-robot-state1 (intern (format nil "BATTERY-STATES-~A-STATUS" i) *keyword-package*)
+ (case (send state :status) (0 'unknown) (1 'missing) (2 'charging) (3 'discharging) (4 'booting)))
+ (setq i (+ i 1))
+ )))
+ (:spot-status-behavior-faults-callback
+ (msg)
+ (send self :set-robot-state1 :behavior-faults
+ (mapcar #'(lambda (fault)
+ (list (cons :behavior-fault-id (send fault :behavior_fault_id))
+ (cons :cause (case (send fault :cause) (0 'unknown) (1 'fall) (2 'hardware)))
+ (cons :status (case (send fault :status) (0 'unknown) (1 'clearable) (2 'unclearable)))))
+ (send msg :faults))))
+ (:spot-status-system-faults-callback
+ (msg)
+ (dolist (fault (send msg :faults))
+ (let ((s (string-upcase (substitute #\- #\_ (send fault :name)))))
+ (send self :set-robot-state1 (intern (format nil "SYSTEM-FAULTS-~A-NAME" s) *keyword-package*)
+ (send fault :NAME))
+ (send self :set-robot-state1 (intern (format nil "SYSTEM-FAULTS-~A-DURATION" s) *keyword-package*)
+ (send (send fault :duration) :to-sec))
+ (send self :set-robot-state1 (intern (format nil "SYSTEM-FAULTS-~A-CODE" s) *keyword-package*)
+ (send fault :code))
+ (send self :set-robot-state1 (intern (format nil "SYSTEM-FAULTS-~A-UID" s) *keyword-package*)
+ (send fault :uid))
+ (send self :set-robot-state1 (intern (format nil "SYSTEM-FAULTS-~A-ERROR_MESSAGE" s) *keyword-package*)
+ (send fault :error_message))
+ (send self :set-robot-state1 (intern (format nil "SYSTEM-FAULTS-~A-ATTRIBUTES" s) *keyword-package*)
+ (send fault :attributes))
+ (send self :set-robot-state1 (intern (format nil "SYSTEM-FAULTS-~A-SEVERITY" s) *keyword-package*)
+ (case (send fault :severity) (0 'unknown) (1 'info) (2 'warn) (3 'critical))))))
+ (:spot-feedback-callback
+ (msg)
+ (send self :set-robot-state1 :feedback-standing (send msg :standing))
+ (send self :set-robot-state1 :feedback-sitting (send msg :sitting))
+ (send self :set-robot-state1 :feedback-moving (send msg :moving))
+ (send self :set-robot-state1 :feedback-serial-number (send msg :serial_number))
+ (send self :set-robot-state1 :feedback-species (send msg :species))
+ (send self :set-robot-state1 :feedback-version (send msg :version))
+ (send self :set-robot-state1 :feedback-nickname (send msg :nickname))
+ (send self :set-robot-state1 :feedback-computer-serial-number(send msg :computer_serial_number)))
+ (:state
+ (&rest args)
+ "use :metrics, :leases :feet, :estop, :wifi, :power-state, :battery-states, :behvior-faults, :system-fault, :feedback to get spot status, you can also acess to the specific data by concatenating these method name + key value, for example :metrics-time-moving"
+ (prog1
+ (send-message* self robot-interface :state args)
+ (flet ((gen-status
+ (key)
+ (mapcan #'(lambda (x) (if (substringp (string key) (string (car x))) (list (cons (intern (subseq (string (car x)) (1+ (length (string key)))) *keyword-package*) (cdr x))))) robot-state)))
+ (case (car args)
+ (:metrics (return-from :state (gen-status :metrics)))
+ (:leases (return-from :state (gen-status :leases)))
+ ;; (:feet (return-from :state (gen-status :feet)))
+ (:estop (return-from :state (gen-status :estop)))
+ (:wifi (return-from :state (gen-status :wifi)))
+ (:manipulator-state (return-from :state (gen-status :manipulator-state)))
+ (:power-state (return-from :state (gen-status :power-state)))
+ (:battery-states (return-from :state (gen-status :battery-states)))
+ ;; (:behavior-faults (return-from :state (gen-status :behavior-faults)))
+ (:system-faults (return-from :state (gen-status :system-faults)))
+ (:feedback (return-from :state (gen-status :feedback)))
+ (:angle-vector
+ (return-from :state (send robot :angle-vector)))
+ (:worldcoords
+ (unless joint-action-enable
+ (return-from :state (send self :worldcoords)))
+ (return-from :state (send *tfl* :lookup-transform "vision" base-frame-id (ros::time 0))))))))
+ ;;
+ (:estop-gentle () (call-trigger-service "/spot/estop/gentle"))
+ (:estop-hard () (call-trigger-service "/spot/estop/hard"))
+ (:claim ()
+ "Claim the robot control"
+ (let ((client (send self :state :leases-body-client-name)))
+ (if (or (null client) (string= client ""))
+ (call-trigger-service "/spot/claim")
+ (ros::ros-warn "robot is already claimed by ~A" client))))
+ (:release () "Relase the robot control" (call-trigger-service "/spot/release"))
+ (:power-on ()
+ "Power on the robot"
+ (if (send *ri* :simulation-modep)
+ (send self :set-robot-state1 :power-state-motor-power-state 'on)
+ (call-trigger-service "/spot/power_on")))
+ (:power-off
+ ()
+ "Power off the robot"
+ (if (send *ri* :simulation-modep)
+ (send self :set-robot-state1 :power-state-motor-power-state 'off)
+ (call-trigger-service "/spot/power_off")))
+ (:self-right () (call-trigger-service "/spot/self_right"))
+ (:stand () "Stand the robot up" (call-trigger-service "/spot/stand"))
+ (:sit () "Sit the robot down" (call-trigger-service "/spot/sit"))
+ (:stop () "Stop the robot in place with minimal motion" (call-trigger-service "/spot/stop"))
+ (:set-locomotion-mode (locomotion-hint) "Set locomotion mode" (call-set-locomotion-service "/spot/locomotion_mode" locomotion-hint))
+ (:set-stair-mode (is-stair-mode) "Set stair mode" (call-set-bool-service "/spot/stair_mode" is-stair-mode))
+ ;;
+ (:dock (dock-id) "Dock the robot" (call-dock-service "/spot/dock" dock-id))
+ (:undock
+ ()
+ "Undock the robot"
+ (send self :power-on)
+ (call-trigger-service "/spot/undock"))
+ ;;
+ (:send-cmd-vel-raw
+ (x y d &key (topic-name "/spot/cmd_vel"))
+ (when (send self :simulation-modep)
+ (return-from :send-cmd-vel-raw t))
+ (unless (ros::get-topic-publisher topic-name)
+ (ros::advertise topic-name geometry_msgs::Twist 1)
+ (unix:sleep 1))
+ (let ((msg (instance geometry_msgs::Twist :init)))
+ (send msg :linear :x x)
+ (send msg :linear :y y)
+ (send msg :angular :z d)
+ (ros::publish topic-name msg)))
+ (:go-velocity
+ (x y d ;; [m/sec] [m/sec] [rad/sec]
+ &optional (msec 1000) ;; msec is total animation time [msec]
+ &key (stop t) (wait t))
+ "control the robot velocity x([m/sec]) y([m/sec]) d([rad/sec]) msec([msec]). msec is the time to travel."
+ (unless wait
+ (ros::ros-error ":go-velocity without wait is unsupported")
+ (return-from :go-velocity nil))
+ (ros::rate 100)
+ (let ((start-time (ros::time-now)))
+ (while (and (ros::ok)
+ (< (* 1000.0 (send (ros::time- (ros::time-now) start-time) :to-sec)) msec))
+ (send self :spin-once)
+ (send self :send-cmd-vel-raw x y d)
+ (ros::sleep)))
+ (when stop
+ (send self :send-cmd-vel-raw 0 0 0))
+ (ros::rate 10)
+ t)
+ (:go-pos
+ (x y &optional (d 0) &key (timeout 10) (wait t)) ;; [m] [m] [degree]
+ "move robot toward (x, y, d) (units are m, m and degrees respectively)."
+ ;;
+ (setq trajectory-cmd-goal-msg (instance spot_msgs::TrajectoryGoal :init))
+ (send trajectory-cmd-goal-msg :target_pose :header :stamp (ros::time-now))
+ (send trajectory-cmd-goal-msg :target_pose :header :frame_id "body")
+ (send trajectory-cmd-goal-msg :target_pose :pose :position :x x)
+ (send trajectory-cmd-goal-msg :target_pose :pose :position :y y)
+ (send trajectory-cmd-goal-msg :target_pose :pose :orientation :z (sin (/ (deg2rad d) 2)))
+ (send trajectory-cmd-goal-msg :target_pose :pose :orientation :w (cos (/ (deg2rad d) 2)))
+ (send trajectory-cmd-goal-msg :duration :data (ros::time timeout))
+ ;;
+ (send trajectory-cmd-action :send-goal trajectory-cmd-goal-msg)
+ (if wait
+ (send trajectory-cmd-action :wait-for-result)
+ )
+ )
+ (:go-pos-wait
+ (x y &optional (d 0) (timeout 10)) ;; [m] [m] [degree]
+ "move robot toward (x, y, d) (units are m, m and degrees respectively). and wait"
+ (send self :go-pos x y d :timeout timeout :wait t)
+ )
+ (:go-pos-no-wait
+ (x y &optional (d 0) (timeout 10)) ;; [m] [m] [degree]
+ "move robot toward (x, y, d) (units are m, m and degrees respectively)."
+ (send self :go-pos x y d :timeout timeout :wait nil)
+ )
+ (:body-pose
+ ;; pose expected to get 3 elements float-vector (r p y), or eus coords.
+ (pose &key (topic-name "/spot/body_pose"))
+ (when (send self :simulation-modep)
+ (return-from :body-pose t))
+ (unless (ros::get-topic-publisher topic-name)
+ (ros::advertise topic-name geometry_msgs::Pose 1)
+ (unix:sleep 1))
+ (if (or (vectorp pose) (listp pose))
+ (progn
+ (ros::ros-debug "Got r p y float-vector or list as args.")
+ (let ((pose-msg (instance geometry_msgs::Pose :init))
+ (quaternion-msg (send self :create-quaternion-msg-from-rpy (elt pose 0) (elt pose 1) (elt pose 2))))
+ (send pose-msg :orientation quaternion-msg)
+ (ros::publish topic-name pose-msg)))
+ (progn
+ (ros::ros-debug "Got coords variable as args.")
+ (let ((pose-msg (ros::coords->tf-pose pose)))
+ (ros::publish topic-name pose-msg))))
+ (send self :stand))
+ (:find-waypoint-position-from-id
+ (id ids)
+ (let (ret)
+ (setq ret (position id ids :test #'string=))
+ ret))
+ (:find-waypoint-id-from-position
+ (index ids)
+ "return waypint id from position, if you set -1 to index, it returns last waypoint"
+ (let (ret)
+ (if (< index 0)
+ (setq index (+ (length ids) index)))
+ (if (< index (length ids))
+ (setq ret (elt ids index)))
+ ret))
+ (:set-localization-fiducial
+ ()
+ "initial the localization for autowalk based on the fiducial marker"
+ (let (r)
+ (setq r (ros::service-call "/spot/set_localization_fiducial"
+ (instance spot_msgs::SetLocalizationFiducialRequest :init)))
+ (ros::ros-info "Call \"/spot/set_localization_fiducial\" returns \"~A\"" (send r :message))
+ t))
+ (:set-localization-waypoint
+ (init-waypoint)
+ "initial the localization for waypoint id in the graph"
+ (let (r)
+ (if (numberp init-waypoint)
+ (prog1
+ (setq ids (send self :list-graph))
+ (setq init-waypoint (send self :find-waypoint-id-from-position init-waypoint ids))))
+ (setq r (ros::service-call "/spot/set_localization_waypoint"
+ (instance spot_msgs::SetLocalizationWaypointRequest :init :waypoint_id init-waypoint)))
+ (ros::ros-info "Call \"/spot/set_localization_waypoint\" returns \"~A\"" (send r :message))
+ t))
+ (:start-recording
+ ()
+ "Start AutoWalk recording"
+ (call-trigger-service "/spot/start-recording"))
+ (:stop-recording
+ ()
+ "Stop AutoWalk recording"
+ (call-trigger-service "/spot/stop-recording"))
+ (:upload-graph
+ (path &key (initial-localization-fiducial t) (wait nil))
+ "upload graph for autowalk"
+ (let (r
+ (srvname "/spot/upload_graph"))
+ (if wait (ros::wait-for-service srvname))
+ (setq r (ros::service-call srvname
+ (instance spot_msgs::UploadGraphRequest :init :upload_filepath path)))
+ (ros::ros-info "Call \"~A\" returns .. \"~A\"" srvname (send r :message))
+ (if initial-localization-fiducial (send self :initial-localization-fiducial))
+ (send r :success)))
+ (:download-graph
+ (path &key (wait nil))
+ "Download AutoWalk graph from robot"
+ (let (r)
+ (if wait (ros::wait-for-service srvname))
+ (setq r (ros::service-call srvname
+ (instance spot_msgs::DownloadGraphRequest :init :download_filepath path)))
+ (ros::ros-info "Call \"~A\" returns... \"~A\"" srvname (send r :message))
+ (send r :success)
+ ))
+ (:list-graph
+ ()
+ "list up the waypoint (a string type hash id) list in the uploaded graph"
+ (let (r)
+ (setq r (ros::service-call "/spot/list_graph"
+ (instance spot_msgs::ListGraphRequest :init)))
+ (ros::ros-info "Call \"/spot/list_graph\" returns ..")
+ (dolist (id (send r :waypoint_ids))
+ (ros::ros-info " \"~A\"" id))
+ (send r :waypoint_ids)))
+ (:clear-graph
+ ()
+ "Clear the AutoWalk graph in the robot."
+ (let ()
+ (call-trigger-service "/spot/clear_graph")
+ ))
+ (:navigate-to
+ (navigate-to &key (initial-localization-waypoint nil))
+ (let (ids c goal ret)
+ (setq ids (send self :list-graph))
+ (if (numberp navigate-to)
+ (setq navigate-to (send self :find-waypoint-id-from-position navigate-to ids)))
+ (if (numberp initial-localization-waypoint)
+ (setq initial-localization-waypoint (send self :find-waypoint-id-from-position initial-localization-waypoint ids)))
+ (setq c (instance ros::simple-action-client :init
+ "/spot/navigate_to" spot_msgs::NavigateToAction))
+ (send c :wait-for-server)
+ (ros::ros-info "initial waypoit ~3D/~3D ~A"
+ (if initial-localization-waypoint
+ (position initial-localization-waypoint ids :test #'string=)
+ -1)
+ (length ids)
+ initial-localization-waypoint)
+ (ros::ros-info " goal waypoit ~3D/~3D ~A"
+ (position navigate-to ids :test #'string=) (length ids) navigate-to)
+ (setq goal (instance spot_msgs::NavigateToActionGoal :init))
+ (send goal :goal :id_navigate_to navigate-to)
+ (send c :send-goal goal :feedback-cb #'(lambda (msg) (let ((id (send msg :feedback :waypoint_id))) (ros::ros-info "~A/~A ~A" (position id ids :test #'string=) (length ids) id))))
+ (setq ret (send c :wait-for-result))
+ (ros::ros-info "~A ~A" ret (send (send c :get-result) :message))
+ ret))
+ ;; These are the methods to calculate rpy -> quaternion.
+ ;; You can use ros::create-quaternion-from-rpy after https://github.com/jsk-ros-pkg/jsk_roseus/pull/662 was merged and released.
+ (:create-quaternion-from-rpy
+ (roll pitch yaw) ;; return [w x y z]
+ (let ((sin-roll (sin (* roll 0.5))) (cos-roll (cos (* roll 0.5)))
+ (sin-pitch (sin (* pitch 0.5))) (cos-pitch (cos (* pitch 0.5)))
+ (sin-yaw (sin (* yaw 0.5))) (cos-yaw (cos (* yaw 0.5))))
+ (float-vector (+ (* cos-roll cos-pitch cos-yaw) (* sin-roll sin-pitch sin-yaw))
+ (- (* sin-roll cos-pitch cos-yaw) (* cos-roll sin-pitch sin-yaw))
+ (+ (* cos-roll sin-pitch cos-yaw) (* sin-roll cos-pitch sin-yaw))
+ (- (* cos-roll cos-pitch sin-yaw) (* sin-roll sin-pitch cos-yaw)))))
+ (:create-quaternion-msg-from-rpy
+ (roll pitch yaw)
+ (let* ((q (send self :create-quaternion-from-rpy roll pitch yaw))
+ (qx (elt q 1)) (qy (elt q 2)) (qz (elt q 3)) (qw (elt q 0)))
+ (instance geometry_msgs::quaternion :init :x qx :y qy :z qz :w qw)))
+ )
+
+(defun spot-init (&optional (create-viewer))
+ (unless (boundp '*spot*) (spot) (send *spot* :reset-pose))
+ (unless (ros::ok) (ros::roseus "spot_eus_interface"))
+ (unless (boundp '*ri*) (setq *ri* (instance spot-interface :init)))
+
+ (ros::spin-once)
+ (send *ri* :spin-once)
+ (send *ri* :claim)
+ (while (member (send *ri* :state :power-state-motor-power-state) (list 'off nil))
+ (unix::sleep 1)
+ (ros::ros-info "powering on...")
+ (send *ri* :power-on))
+ ;;
+ (unless (every #'(lambda (x) (eq x 'made)) (mapcar #'(lambda (x) (cdr (assoc :contact x))) (send *ri* :state :feet)))
+ (ros::ros-info "run (send *ri* :stand) to stand the robot"))
+
+ (when create-viewer (objects (list *spot*)))
+ )
diff --git a/jsk_spot_robot/spoteus/spot-utils.l b/jsk_spot_robot/spoteus/spot-utils.l
new file mode 100644
index 0000000000..86e7b92b1b
--- /dev/null
+++ b/jsk_spot_robot/spoteus/spot-utils.l
@@ -0,0 +1,143 @@
+(require :spot "package://spoteus/spot.l")
+
+(unless (assoc :init-orig (send spot-robot :methods))
+ (rplaca (assoc :init (send spot-robot :methods)) :init-orig))
+
+(defmethod spot-robot
+ (:init
+ (&rest args) ;; fix colors
+ (dolist (b (list :_make_instance_body_geom0
+ :_make_instance_front_left_upper_leg_geom0
+ :_make_instance_front_left_lower_leg_geom0
+ :_make_instance_front_right_upper_leg_geom0
+ :_make_instance_front_right_lower_leg_geom0
+ :_make_instance_rear_left_upper_leg_geom0
+ :_make_instance_rear_left_lower_leg_geom0
+ :_make_instance_rear_right_upper_leg_geom0
+ :_make_instance_rear_right_lower_leg_geom0))
+ (rplacd (assoc b (send (class self) :methods))
+ (cdr (subst '(list :diffuse #f(1.00 0.84 0.32 0))
+ '(list :diffuse (float-vector 1.000000 1.000000 1.000000 1.000000))
+ (assoc b (send (class self) :methods)))))
+ )
+ (dolist (b (list :_make_instance_arm0.link_sh0_geom0
+ :_make_instance_arm0.link_sh1_geom0
+ :_make_instance_arm0.link_hr0_geom0
+; :_make_instance_arm0.link_el0_geom0
+ :_make_instance_arm0.link_el1_geom0
+ :_make_instance_arm0.link_wr0_geom0
+ :_make_instance_arm0.link_wr1_geom0
+ :_make_instance_arm0.link_fngr_geom0
+ ))
+ (rplacd (assoc b (send (class self) :methods))
+ (cdr (subst '(list :diffuse #f(1.00 0.84 0.32 0))
+ '(list :diffuse (float-vector 0.200000 0.200000 0.200000 1.000000))
+ (assoc b (send (class self) :methods)))))
+ )
+ (dolist (b (list :_make_instance_front_left_hip_geom0
+ :_make_instance_front_right_hip_geom0
+ :_make_instance_rear_left_hip_geom0
+ :_make_instance_rear_right_hip_geom0))
+ (rplacd (assoc b (send (class self) :methods))
+ (cdr (subst '(list :diffuse #f(0.1 0.1 0.1 0))
+ '(list :diffuse (float-vector 1.000000 1.000000 1.000000 1.000000))
+ (assoc b (send (class self) :methods)))))
+ )
+ (prog1
+ (send* self :init-orig args)
+ ;; add head-end-coords (camera coords)
+ (let ((head-end-coords (make-cascoords :coords (send arm-end-coords :copy-worldcoords))))
+ (send head-end-coords :rotate pi/2 :y)
+ (send (send arm-end-coords :parent) :assoc head-end-coords)
+ (send self :put :head-end-coords head-end-coords))))
+ ;; add head method so that (send *spot* :head :look-at) works
+ (:head
+ (&rest args)
+ (unless args (setq args (list nil)))
+ (case (car args)
+ (:end-coords
+ (user::forward-message-to (send self :get :head-end-coords) (cdr args)))
+ (:look-at
+ (let ((target-coords
+ (orient-coords-to-axis ;; orient target-coords to look-at direction
+ (make-coords :pos (cadr args))
+ (v- (cadr args) (send self :head :end-coords :worldpos))))
+ (head-coords (send self :head :end-coords :copy-worldcoords)))
+ ;; align target-coords x (image-y) direction to head direction
+ (send target-coords :rotate
+ (acos (v. (send target-coords :axis :x)
+ (send head-coords :axis :x))) :z)
+ (send* self :head :inverse-kinematics target-coords
+ :move-target (send self :head :end-coords)
+ :rotation-axis t
+ :translation-axis nil
+ :target-coords target-coords ;; for debug-view
+ (cddr args))))
+ ;;(send* self :inverse-kinematics-loop-for-look-at :head (cdr args)))
+ (t
+ (send* self :limb :arm args))))
+ (:legs ;; support legs for all limbs
+ (&rest args)
+ (case (car args)
+ (:crotch-r
+ (forward-message-to front_left_hip_x_jt (cdr args))
+ (forward-message-to front_right_hip_x_jt (cdr args))
+ (forward-message-to rear_left_hip_x_jt (cdr args))
+ (forward-message-to rear_right_hip_x_jt (cdr args)))
+ (:crotch-p
+ (forward-message-to front_left_hip_y_jt (cdr args))
+ (forward-message-to front_right_hip_y_jt (cdr args))
+ (forward-message-to rear_left_hip_y_jt (cdr args))
+ (forward-message-to rear_right_hip_y_jt (cdr args)))
+ (:knee-p
+ (forward-message-to front_left_knee_jt (cdr args))
+ (forward-message-to front_right_knee_jt (cdr args))
+ (forward-message-to rear_left_knee_jt (cdr args))
+ (forward-message-to rear_right_knee_jt (cdr args)))))
+ (:body-inverse-kinematics
+ (target-coords
+ &rest args
+ &key (move-target) (link-list)
+ (min (float-vector -500 -500 -500 -200 -200 -100))
+ (max (float-vector 500 500 500 200 200 100))
+ (target-centroid-pos)
+ (rotation-axis)
+ (root-link-virtual-joint-weight #f(0.0 0.0 0.1 0.1 0.5 0.5))
+ &allow-other-keys)
+ "The purpose of this function is to use :fullbody-inverse-kinematics by only specifying body target-coords.
+Example:
+(send *spot* :body-inverse-kinematics (make-coords :pos #f(0 0 50)))
+"
+ (let ((body-coords (make-cascoords :coords (send (send self :coords) :copy-worldcoords))))
+ (send body_lk :assoc body-coords)
+ (setq target-coords
+ (list target-coords
+ (send self :larm :end-coords :copy-worldcoords)
+ (send self :rarm :end-coords :copy-worldcoords)
+ (send self :lleg :end-coords :copy-worldcoords)
+ (send self :rleg :end-coords :copy-worldcoords)))
+ (unless move-target
+ (setq move-target
+ (list body-coords
+ (send self :larm :end-coords)
+ (send self :rarm :end-coords)
+ (send self :lleg :end-coords)
+ (send self :rleg :end-coords))))
+ (unless link-list
+ (setq link-list
+ (mapcar #'(lambda (limb) (send self :link-list (send limb :parent))) move-target)))
+ (unless rotation-axis
+ (setq rotation-axis (list t nil nil nil nil)))
+ (prog1
+ (send-super*
+ :fullbody-inverse-kinematics target-coords
+ :move-target move-target
+ :link-list link-list
+ :min min
+ :max max
+ :target-centroid-pos target-centroid-pos
+ :rotation-axis rotation-axis
+ :root-link-virtual-joint-weight root-link-virtual-joint-weight
+ args)
+ (send body_lk :dissoc body-coords))))
+ )
diff --git a/jsk_spot_robot/spoteus/spot.yaml b/jsk_spot_robot/spoteus/spot.yaml
new file mode 100644
index 0000000000..1157a69b53
--- /dev/null
+++ b/jsk_spot_robot/spoteus/spot.yaml
@@ -0,0 +1,54 @@
+##
+## - collada_joint_name : euslisp_joint_name (start with :)
+##
+
+lfleg:
+ - front_left_hip_x : lfleg-crotch-r
+ - front_left_hip_y : lfleg-crotch-p
+ - front_left_knee : lfleg-knee-p
+rfleg:
+ - front_right_hip_x : rfleg-crotch-r
+ - front_right_hip_y : rfleg-crotch-p
+ - front_right_knee : rfleg-knee-p
+lrleg:
+ - rear_left_hip_x : lrleg-crotch-r
+ - rear_left_hip_y : lrleg-crotch-p
+ - rear_left_knee : lrleg-knee-p
+rrleg:
+ - rear_right_hip_x : rrleg-crotch-r
+ - rear_right_hip_y : rrleg-crotch-p
+ - rear_right_knee : rrleg-knee-p
+arm:
+ - arm0.sh0 : arm-shoulder-y
+ - arm0.sh1 : arm-shoulder-p
+ - arm0.el0 : arm-elbow-p
+ - arm0.el1 : arm-elbow-r
+ - arm0.wr0 : arm-wrist-p
+ - arm0.wr1 : arm-wrist-r
+hand:
+ - arm0.f1x : hand-gripper-p
+
+
+angle-vector:
+ reset-pose : [0.0, 45.0, -90.0, 0.0, 45.0, -90.0, 0.0, 45.0, -90.0, 0.0, 45.0, -90.0, 0.0, -170.0, 160.0, 0.0, 10.0, 0.0, 0]
+
+lfleg-end-coords:
+ parent : front_left_lower_leg
+ translate : [0, 0, -0.38]
+ rotate : [0, 1, 0, 0]
+rfleg-end-coords:
+ parent : front_right_lower_leg
+ translate : [0, 0, -0.38]
+ rotate : [0, 1, 0, 0]
+lrleg-end-coords:
+ parent : rear_left_lower_leg
+ translate : [0, 0, -0.38]
+ rotate : [0, 1, 0, 0]
+rrleg-end-coords:
+ parent : rear_right_lower_leg
+ translate : [0, 0, -0.38]
+ rotate : [0, 1, 0, 0]
+arm-end-coords:
+ parent: arm0.link_wr1
+ translate : [0.175, 0, -0.03]
+ rotate : [1, 0, 0, 0]
diff --git a/jsk_spot_robot/spoteus/test/test-spot.l b/jsk_spot_robot/spoteus/test/test-spot.l
new file mode 100755
index 0000000000..1d378779a4
--- /dev/null
+++ b/jsk_spot_robot/spoteus/test/test-spot.l
@@ -0,0 +1,37 @@
+#!/usr/bin/env roseus
+(require :unittest "lib/llib/unittest.l")
+(require "package://spoteus/spot-utils.l")
+(require "package://spoteus/spot-interface.l")
+
+(init-unit-test)
+
+(deftest test-pose
+ (let (robot)
+ (setq robot (instance spot-robot :init))
+ ;; move robot arm to #f(600 0 600) relative to body
+ (send robot :arm :inverse-kinematics (send (make-coords :pos #f(600 0 600)) :transform robot))
+ ))
+
+(defun look-at (robot)
+ (let ((targets (list (make-cube 100 100 100 :pos #f(2000 0 0))
+ (make-cube 100 100 100 :pos #f(2000 1000 2000))
+ (make-cube 100 100 100 :pos #f(2000 -1000 1000))
+ (make-cube 100 100 100 :pos #f(0 2000 2000))
+ (make-cube 100 100 100 :pos #f(0 -2000 1000)))))
+ (objects (append (list robot) targets))
+ (dolist (target targets)
+ (send robot :head :look-at (send target :worldpos) :debug-view :no-mesage)
+ (send *irtviewer* :draw-objects))))
+
+(deftest test-spot-look-at
+ (let (robot)
+ (setq robot (instance spot-robot :init))
+ (look-at robot)
+ (send robot :arm :inverse-kinematics (send (make-coords :pos #f(600 0 600)) :transform robot))
+ (look-at robot)))
+
+(deftest test-spot-init
+ (spot-init))
+
+(run-all-tests)
+(exit)
diff --git a/jsk_spot_robot/spoteus/test/test-spot.test b/jsk_spot_robot/spoteus/test/test-spot.test
new file mode 100644
index 0000000000..b2e8fb2164
--- /dev/null
+++ b/jsk_spot_robot/spoteus/test/test-spot.test
@@ -0,0 +1,3 @@
+
+
+