Global planning for robotics based on graph search algorithms
- Accepting a new goal in rviz
- Create new subscriber with check for current goal processing
- Constraint check for the goal with dimensions of map
- Round up the goal to cell of the map
- Visualise the goal in rviz
- Update the Map object with the new goal (wipe off any old goals as well)
- Breadth First Search Planner
- Write Motion Model
- Planning thread wait to receive goal
- Iterate queue until goal cell is found
- Build final path
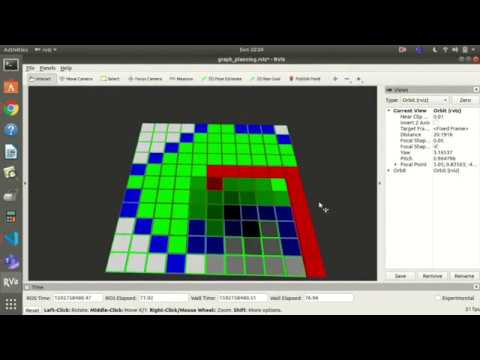
- Visualise frontier, explored nodes and final path
- Add progress indicator during planning and performance metrics
- Clear Map function
- Add obstacles
- Is diagonal exploration possible?
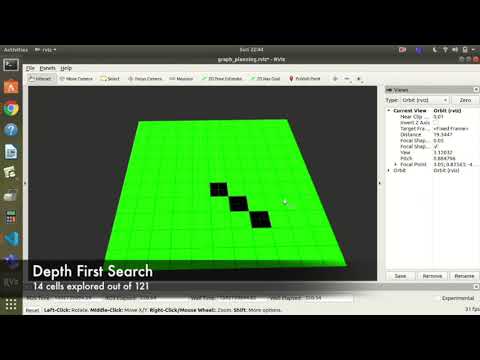
- Depth First Search Planner
- Create stack data structure
- Adapt breadth first search to depth first search
- 2D Cost Map
- CostMap class as derived class of OGMap class
- Initialise all costs to default values
- Inflate OG Map obstacles in the cost map
- Visualise Cost Map using marker array
- what should be default cost value of cost map cells
- Dijkstra's Planner
- Adapt search queue to priority queue
- track movement costs
- Visualise the frontier,explored nodes and final path
- Introduce movement cost variable (No such variable needed ??? -> taken care of by COST_NEUTRAL)
- Trade off between path length and proximity to obstacles (COST_NEUTRAL vs cost_scaling_factor)
- Greedy Best First Search Planner
- Priority Queue returns cells closest to the goal
- A Star Planner
- Introduce the manhattan distance (from goal) heuristic
- Weight of the heuristic variable (Optimality condition : heuristic <true distance)
- heuristic_weight variable -> trade off between Dijkstras and Greedy Best first search
- Implement A Star with a compile time macro switch in Dijkstras