
In Greek mythology, Prometheus is one of the most intelligent gods. We hope this project can bring unlimited wisdom and light to R&D in drones.
Prometheus is an open source autonomous drone software platform, which provides full set of solutions for the intelligent and autonomous flight of drones. This project is based on the PX4 open source flight controller firmware, and aims to provide PX4 developers with mature and available airborne computer terminal programs, bringing a more concise and faster development experience. At present, modules such as mapping, localization, planning, control and target detection have been integrated, and simulation code of Gazebo is also provided.
-
Installation and Instructions: Prometheus WIKI
-
Supporting Courses: Prometheus autonomous drone secondary development course, this course focuses on the basic knowledge and operation practice in this project, suitable for beginners. After purchasing the course, online Q&A activities will be arranged regularly (voice communication, convenient and easy to understand!) Course Registration
-
Supporting Hardware Kit: Coming soon, stay tuned! Please follow AmovLab - Taobao or AmovLab - JD.COM
-
Supporting Ground Control Station: Coming soon, stay tuned!
-
Development and Maintenance Team: Member Introduction
-
This is an open source project and it is not easy to maintain. Please click Star to support us. Thank you!
-
If you have any questions about the project, please ask in the issue of this project, or add WeChat: jiayue199506 (remark message: Prometheus) to the Prometheus autonomous drone discussion group
-
For more information or to seek project cooperation, drone software and hardware customization services, please scan the QR code on the right and follow the WeChat public account : 阿木实验室

As long as you use the Prometheus project to develop autonomous drones and publish a paper, you can get the Amov scholarship! For more details, please click here.
-
RGB-D Mapping
-
3D Lidar Mapping (no demo picture yet)
-
Local Mapping (APF)
-
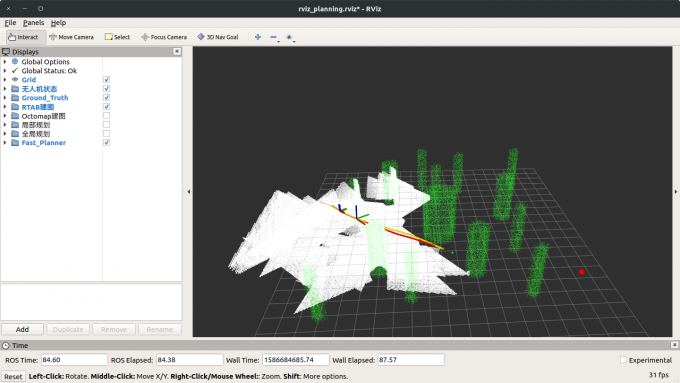
Global Mapping (A)*
-
Trace Optimization (Fast_Planner)
-
Second Development of Outer Loop Controller
-
Multi-drone Formation Flying
-
Circular Crossing
-
Color Line Inspection
-
Number Recognition
-
KCF Tracking
-
YOLO-Based Target Detection (no demo picture yet)
-
Autonomous Landing on Mobile Platform
-
UAV + UGV Coordinated Control




- This project is protected by the BSD 3-Clause protocol. Click LICENSE to get more information.
- This project is for personal use only, please do not use it for commercial purposes.
- If this project is used for profit-making activities, AmovLab will pursue the infringement.