在MakeCode的原始积木中,有一个"forever"积木,其内部的程序会在"on start"积木内的程序执行完后在后台无限循环执行,若"on start"内程序还未执行完成或是有"while true"积木使程序进入while循环,则不会执行"forever"积木,而在每一次循环的间隙,都允许运行其他的事件处理程序,例如"on button A pressed"积木,该积木在“按钮A被按过一次”的事件发生时运行一次。
我们可以利用"forever"与"on button pressed"积木做出一个简单的按钮计数器。

这其中设置了一个"A_was_pressed_times"变量,而"change A_was_pressed_times by 1"积木则是使该变量自加1。按下一次按钮A,变量自加1,然后一直循环显示变量值,即记录按钮A按下次数并显示在LED矩阵上。





以右轮为例,可以制作一个测试程序,检测右轮编码盘对应的红外对管向P5引脚输出高低电平信号。



显然,我们可以利用红外对管对左右两轮的编码盘进行计数了。
以右轮为例,参照micro:bit按钮计数器即可设计出Q-Car车轮上的编码盘与红外对管组合的光电计数器。
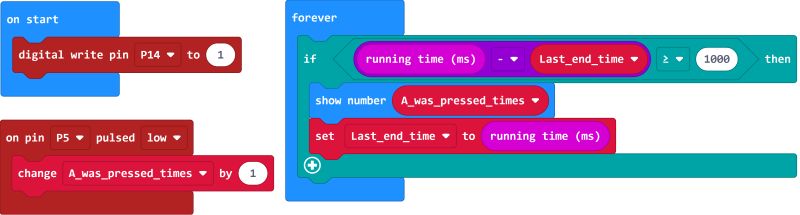
我们可以加入一个间隔一段时间输出一次内容的功能,如上图所示。"running time(ms)"积木会获取程序从启动或复位以来至读取这个积木为止的时间,单位为毫秒,即获取从开机到现在所经过的时间。在"forever"积木中加入"if"条件积木,设置一个变量"A_was_pressed_times"用于储存每当条件满足时的时间数值,判断条件为当前时间减去变量大于等于1000ms时,显示一次计数值,将此次满足条件的时间数值储存到变量中用于下次判断,即实现了间隔1s让micro:bit显示一次计数值。
我们先简单的陈述转速的定义,即物体在单位时间内旋转360°的次数。RPM是一个较常用的转速单位,表示设备每分钟的旋转次数。
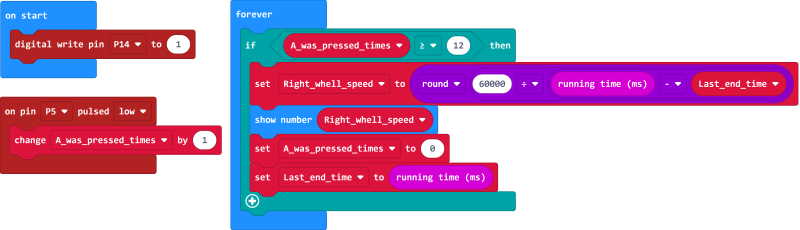
我们从直觉上理解,通过计数器统计1分钟Q-Car车轮的编码盘计数值除以12即可得到RPM转速值,但这样显然得到的信息时效性滞后了太多。如果将统计时间缩短到5秒甚至1秒,例如统计1秒Q-Car右轮的编码盘计数值除以12再乘以60,也可得到右轮RPM转速值。