- 提供
tools/vis_cam.py工具来可视化类别激活图。请使用pip install grad-cam安装依赖,版本≥1.3.6 - 在
Awesome-Backbones/models/下找到对应配置文件 - 修改data_cfg中test的ckpt路径,改为训练完毕的权重 目前支持的方法有:
| Method | What it does |
|---|---|
| GradCAM | 使用平均梯度对 2D 激活进行加权 |
| GradCAM++ | 类似 GradCAM,但使用了二阶梯度 |
| XGradCAM | 类似 GradCAM,但通过归一化的激活对梯度进行了加权 |
| EigenCAM | 使用 2D 激活的第一主成分(无法区分类别,但效果似乎不错) |
| EigenGradCAM | 类似 EigenCAM,但支持类别区分,使用了激活 * 梯度的第一主成分,看起来和 GradCAM 差不多,但是更干净 |
| LayerCAM | 使用正梯度对激活进行空间加权,对于浅层有更好的效果 |

命令行:
python tools/vis_cam.py \
${IMG} \
${CONFIG_FILE} \
[--target-layers ${TARGET-LAYERS}] \
[--preview-model] \
[--method ${METHOD}] \
[--target-category ${TARGET-CATEGORY}] \
[--save-path ${SAVE_PATH}] \
[--vit-like] \
[--num-extra-tokens ${NUM-EXTRA-TOKENS}]
[--aug_smooth] \
[--eigen_smooth] \
[--device ${DEVICE}] \所有参数的说明:
img:目标图片路径。config:模型配置文件的路径。需注意修改配置文件中data_cfg->test->ckpt的权重路径,将使用该权重进行预测--target-layers:所查看的网络层名称,可输入一个或者多个网络层, 如果不设置,将使用最后一个block中的norm层。--preview-model:是否查看模型所有网络层。--method:类别激活图图可视化的方法,目前支持GradCAM,GradCAM++,XGradCAM,EigenCAM,EigenGradCAM,LayerCAM,不区分大小写。如果不设置,默认为GradCAM。--target-category:查看的目标类别,如果不设置,使用模型检测出来的类别做为目标类别。--save-path:保存的可视化图片的路径,默认不保存。--eigen-smooth:是否使用主成分降低噪音,默认不开启。--vit-like: 是否为ViT类似的 Transformer-based 网络--num-extra-tokens:ViT类网络的额外的 tokens 通道数,默认使用主干网络的num_extra_tokens。--aug-smooth:是否使用测试时增强--device:使用的计算设备,如果不设置,默认为'cpu'。
在指定 `--target-layers` 时,如果不知道模型有哪些网络层,可使用命令行添加 `--preview-model` 查看所有网络层名称;
示例(CNN):
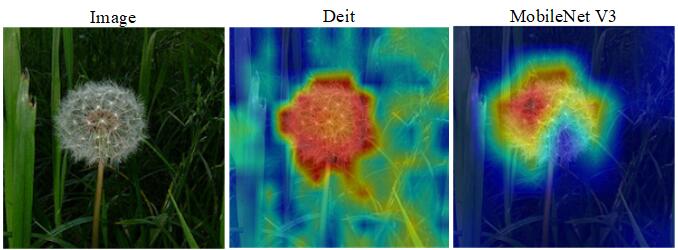
- 使用不同方法可视化
MobileNetV3,默认target-category为模型检测的结果,使用默认推导的target-layers。
python tools/vis_cam.py datasets/test/dandelion/14283011_3e7452c5b2_n.jpg models/mobilenet/mobilenet_v3_small.py
- 指定同一张图中不同类别的激活图效果图,给定类别索引即可
python tools/vis_cam.py datasets/test/dandelion/14283011_3e7452c5b2_n.jpg models/mobilenet/mobilenet_v3_small.py --target-category 1
- 使用
--eigen-smooth以及--aug-smooth获取更好的可视化效果。
python tools/vis_cam.py datasets/test/dandelion/14283011_3e7452c5b2_n.jpg models/mobilenet/mobilenet_v3_small.py --eigen-smooth --aug-smooth
示例(Transformer):
对于 Transformer-based 的网络,比如 ViT、T2T-ViT 和 Swin-Transformer,特征是被展平的。为了绘制 CAM 图,需要指定 --vit-like 选项,从而让被展平的特征恢复方形的特征图。
除了特征被展平之外,一些类 ViT 的网络还会添加额外的 tokens。比如 ViT 和 T2T-ViT 中添加了分类 token,DeiT 中还添加了蒸馏 token。在这些网络中,分类计算在最后一个注意力模块之后就已经完成了,分类得分也只和这些额外的 tokens 有关,与特征图无关,也就是说,分类得分对这些特征图的导数为 0。因此,我们不能使用最后一个注意力模块的输出作为 CAM 绘制的目标层。
另外,为了去除这些额外的 toekns 以获得特征图,我们需要知道这些额外 tokens 的数量。MMClassification 中几乎所有 Transformer-based 的网络都拥有 num_extra_tokens 属性。而如果你希望将此工具应用于新的,或者第三方的网络,而且该网络没有指定 num_extra_tokens 属性,那么可以使用 --num-extra-tokens 参数手动指定其数量。
- 对
Swin Transformer使用默认target-layers进行 CAM 可视化:
python tools/vis_cam.py datasets/test/dandelion/14283011_3e7452c5b2_n.jpg models/swin_transformer/tiny_224.py --vit-like
- 对
Vision Transformer(ViT)进行 CAM 可视化(经测试其实不加--target-layer即默认效果也差不多):
python tools/vis_cam.py datasets/test/dandelion/14283011_3e7452c5b2_n.jpg models/vision_transformer/vit_base_p16_224.py --vit-like --target-layers backbone.layers[-1].ln1
- 对
T2T-ViT进行 CAM 可视化:
python tools/vis_cam.py datasets/test/dandelion/14283011_3e7452c5b2_n.jpg models/t2t_vit/t2t_vit_t_14.py --vit-like --target-layers backbone.encoder[-1].ln1